
エレベータの保守運転装置
【課題】かご上に新たな機器を設置しなくても、かご上に人がいるかどうかを正確に把握することができるエレベータの保守運転装置の提供。
【解決手段】かご2及び釣合い錘8を昇降させる巻上機5と、かご2内の負荷を計測する秤装置16とを備え、巻上機5は、主ロープ9が巻き掛けられて回転する駆動シーブ7を有するエレベータに適用され、駆動シーブ7のトルクを実測トルクとして実測するトルク検出装置17と、秤装置16によって計測されたかご2内の負荷に基づいて、かご2の運転方向別の駆動シーブ7のトルクを推定トルクとして演算する推定トルク演算部20と、実測トルクと推定トルクとを比較し、かご2上に人がいるかどうかを判定する判定装置21と、この判定装置21によって判定された判定結果に応じてエレベータの運転を制御する制御装置18とを備えた。
【解決手段】かご2及び釣合い錘8を昇降させる巻上機5と、かご2内の負荷を計測する秤装置16とを備え、巻上機5は、主ロープ9が巻き掛けられて回転する駆動シーブ7を有するエレベータに適用され、駆動シーブ7のトルクを実測トルクとして実測するトルク検出装置17と、秤装置16によって計測されたかご2内の負荷に基づいて、かご2の運転方向別の駆動シーブ7のトルクを推定トルクとして演算する推定トルク演算部20と、実測トルクと推定トルクとを比較し、かご2上に人がいるかどうかを判定する判定装置21と、この判定装置21によって判定された判定結果に応じてエレベータの運転を制御する制御装置18とを備えた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、かご上に人がいるかどうかを判定し、この判定結果に応じてエレベータの運転を制御する制御装置を備えたエレベータの保守運転装置に関する。
【背景技術】
【0002】
一般的に、エレベータの保守作業は、保守員がエレベータのかご上に乗った状態で行われる。このとき、乗客を運ぶときのようにかごを通常の速度で昇降させる通常運転が行われることは好ましくないので、従来よりかごを通常の速度よりも低い速度で昇降させる低速運転が行われ、かご上で作業を行う保守員の安全が確保されている。そして、エレベータには、かご上に人がいるときに誤って通常運転が行われることを防止する各種の装置が設けられている。
【0003】
この種の装置の従来技術の1つとして、エレベータの運転を通常運転から低速運転へ切り替える切替スイッチと、かご上にいる人を検出する検出器と、この検出器の検出結果に応じてエレベータの運転を制御する制御装置とを備え、この制御装置は、切替スイッチを通常運転に切り替えたときに検出器が作動すると、通常運転を無効にするエレベータの運転装置が知られている(例えば、特許文献1参照)。
【0004】
また、かご上に人がいるときに通常運転が行われることを防止する装置ではないが、これに関連する従来技術の1つとして、昇降路内を昇降するかごと、このかごに主ロープを介して連結された釣合い錘と、かご及び釣合い錘を昇降させる巻上機と、この巻上機は、主ロープが巻き掛けられて回転する駆動シーブを有するエレベータに設けられた自動点検装置も知られている(例えば、特許文献2参照)。この従来技術のエレベータの自動点検装置は、かごの荷重を検出荷重として検出する荷重検出装置と、巻上機の駆動シーブの回転トルクを検出するトルク検出装置と、このトルク検出装置からの情報に基づいて、かごの荷重を推定荷重として求め、検出荷重と推定荷重とを比較することにより、エレベータの異常の有無、例えば主ロープが昇降路内の機器に引っ掛かっているかどうかを判定する判定装置を備えている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平07−137947号公報
【特許文献2】特開2007−112538号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ここで、特許文献1に開示された従来技術のエレベータの運転装置では、上述したようにかご上にいる人を検出する検出器を備えており、この検出器として例えば赤外線センサを用いてかご上に赤外線を発して人を検知するようにしている。しかしながら、かご上には主ロープの一端やプーリ等の設備機器が設置されてかご上の配置構造が複雑になっているので、これらの設備機器が障害となってかご上で赤外線が当たらない場所が生じ、この場所で作業を行っている人を赤外線で上手く検出できないことが問題となっている。この場合には、複数の赤外線センサをかご上の異なる場所に設けたり、あるいは赤外線センサを設置する前に赤外線センサの検出範囲を十分に検討する必要があるので、赤外線センサの設置作業が煩雑になることが懸念されている。
【0007】
また、特許文献2に開示された従来技術のエレベータの自動点検装置は、地震発生後のエレベータの点検を自動的に行って主ロープの引っ掛かりを検出するものであるが、この装置の荷重検出装置によって検出された検出荷重と、トルク検出装置からの情報に基づいて算出された推定荷重とを比較して判定装置でかご上の人を検出することに応用することも考えられる。しかし、従来技術のエレベータの自動点検装置では、主ロープの引っ掛かりを検出するためのものであり、判定装置によるかご上の人の存在を検出するものではないので、判定装置によってかご上に人が存在するか否かを検出するには異なる判定方法を適用する必要がある。このように、従来技術のエレベータの自動点検装置の構成では、かご上に人がいるかどうかを正確に把握することができるものではなかった。
【0008】
本発明は、このような従来技術の実情からなされたもので、その目的は、かご上に新たな機器を設置しなくても、かご上に人がいるかどうかを正確に把握することができるエレベータの保守運転装置を提供することにある。
【課題を解決するための手段】
【0009】
上記の目的を達成するために、本発明のエレベータの保守運転装置は、昇降路内を昇降するかごと、このかごに主ロープを介して連結された釣合い錘と、前記かご及び前記釣合い錘を昇降させる巻上機と、前記かご内の負荷を計測する負荷計測装置とを備え、前記巻上機は、前記主ロープが巻き掛けられて回転する駆動シーブを有するエレベータに適用され、前記かご上に人がいるかどうかを判定し、この判定結果に応じて前記エレベータの運転を制御する制御装置を備えたエレベータの保守運転装置において、前記駆動シーブのトルクを実測トルクとして実測するトルク検出装置と、前記負荷計測装置によって計測された前記かご内の負荷に基づいて、前記かごの運転方向別の前記駆動シーブのトルクを推定トルクとして演算する推定トルク演算部と、前記トルク検出装置によって実測された前記実測トルクと前記推定トルク演算部によって演算された前記推定トルクとを比較し、前記かご上に人がいるかどうかを判定する判定装置とを備えたことを特徴としている。
【0010】
このように構成した本発明は、かごが上昇する運転が行われているときに得られる巻上機の駆動シーブのトルクは、かごが下降する運転が行われているときに得られる駆動シーブのトルクに対して異なる値になるので、推定トルク演算部は、負荷計測装置によって計測されたかご内の負荷に基づいて、かごの運転方向別の駆動シーブのトルクを推定トルクとして演算するようにしている。そして、判定装置は、この演算された推定トルクをトルク検出装置で実測された実測トルクの比較対照とすることにより、かごの具体的な運転状況に合わせてかご上に人がいるかどうかを適切に判定することができる。このように、エレベータに既設された負荷計測装置を用いて推定トルク演算部でかごの運転方向別の駆動シーブのトルクを推定することにより、かご上に新たな機器を設置しなくても、判定装置の判定結果からかご上に人がいるかどうかを正確に把握することができる。
【0011】
また、本発明に係るエレベータの保守運転装置は、前記発明において、前記判定装置は、前記かごが上昇する方向へ運転したとき、前記実測トルクが前記推定トルクよりも大きければ前記かご上に人がいると判定し、前記実測トルクが前記推定トルクよりも大きくなければ前記かご上に人がいないと判定し、前記かごが下降する方向へ運転したとき、前記実測トルクが前記推定トルクよりも小さければ前記かご上に人がいると判定し、前記実測トルクが前記推定トルクよりも小さくなければ前記かご上に人がいないと判定することを特徴としている。
【0012】
このように構成した本発明は、かごが上昇する方向へ運転したときにかご上に人がいる場合には、かご上の人の負荷が加算されることにより、駆動シーブのトルクが大きくなる。一方、かごが下降する方向へ運転したときにかご上に人がいる場合には、かご上の人の負荷が差し引かれることにより、駆動シーブのトルクが小さくなる。従って、判定装置は、かごの運転方向に応じて推定トルクの値に対する判定の判断を変更することにより、かご上に人がいるかどうかを的確に判別することができる。
【0013】
また、本発明に係るエレベータの保守運転装置は、前記発明において、前記かごは、乗車空間を形成するかご室と、このかご室を囲み、前記かご室を支持するかご枠とから少なくとも構成され、前記負荷計測装置は、前記かご枠のうち前記かごの下側に設けられ、前記かご室の荷重を実測する秤装置から成り、前記判定装置は、前記実測トルクと前記推定トルクとの差を演算するトルク差演算手段を有し、このトルク差演算手段によって演算された前記実測トルクと前記推定トルクとの差が所定の値より大きければ前記かご上の人が前記かご枠の梁上にいると判定し、前記トルク差演算手段によって演算された前記実測トルクと前記推定トルクとの差が前記所定の値より大きくなければ、前記かご上の人が前記かご室の天井にいると判定することを特徴としている。
【0014】
このように構成した本発明は、かご上の人がかご枠の梁上にいるときに計測される負荷は、かご上の人がかご室の天井にいるときに計測される負荷に対して異なる値になるので、負荷計測装置によって計測されたかご内の負荷に基づいて演算される推定トルクもそれぞれ異なる値となる。そのため、判定装置は、トルク差演算手段によって演算されたトルク差と所定の値とを比較することにより、かご上にいる人がかご枠の梁上にいるのか、あるいはかご室の天井にいるのかを明確に区別することができる。このように、かご上に人がいるかどうかだけでなく、かご上の人の位置まで特定できるので、かご上の人の位置に応じた適切な処置を行うことができる。
【0015】
また、本発明に係るエレベータの保守運転装置は、前記発明において、前記制御装置は、前記判定装置によって前記かご上に人がいると判定された場合、前記かごを通常の速度よりも低い速度で走行させる低速運転にし、前記判定装置によって前記かご上に人がいないと判定された場合、前記かごを通常の速度で走行させる通常運転にする制御を行うことを特徴としている。
【0016】
このように構成した本発明は、判定装置によってかご上に人がいると判定された場合には、かごが通常の速度で走行し、エレベータの運転が急に低速運転から通常運転へ切替ることもないので、かご上にいる人が安心して作業を進行することができる。一方、判定装置によってかご上に人がいないと判定された場合には、エレベータの運転を低速運転から通常運転へ切り替えたり、あるいは通常運転を維持することにより、乗客がエレベータを通常通りに利用できない時間を省くことができる。
【発明の効果】
【0017】
本発明のエレベータの保守運転装置は、駆動シーブのトルクを実測トルクとして実測するトルク検出装置と、負荷計測装置によって計測されたかご内の負荷に基づいて、かごの運転方向別の駆動シーブのトルクを推定トルクとして演算する推定トルク演算部と、トルク検出装置によって実測された実測トルクと推定トルク演算部によって演算された推定トルクとを比較し、かご上に人がいるかどうかを判定する判定装置と、この判定装置の判定結果に応じてエレベータの運転を制御する制御装置とを備えている。従って、エレベータに既設された負荷計測装置を用いて推定トルク演算部でかごの運転方向別の駆動シーブのトルクを推定することにより、かご上に新たな機器を設置しなくても、判定装置の判定結果からかご上に人がいるかどうかを正確に把握することができ、従来よりも判定装置によるかご上の人の検出精度を向上させることができる。これにより、制御装置が判定装置の判定結果に応じてエレベータの運転を制御することにより、かご上での作業においてエレベータに対する高い信頼性を確保することができる。
【図面の簡単な説明】
【0018】
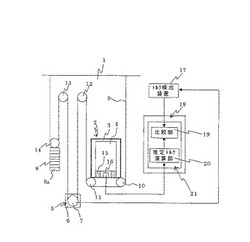
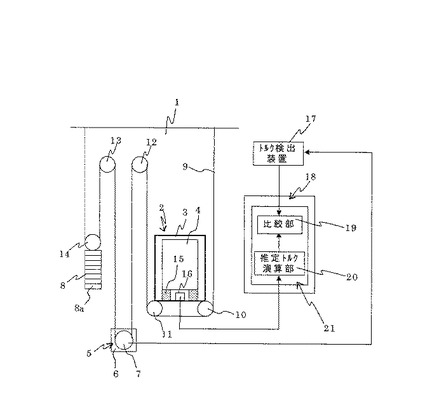
【図1】本発明に係るエレベータの保守運転装置の第1実施形態の構成を示す図である。
【図2】図1に示す秤装置によって出力される秤装置の出力とかご内の負荷との関係、及びトルク検出装置によって実測されたモータのトルクとかご内の負荷との関係を示す図である。
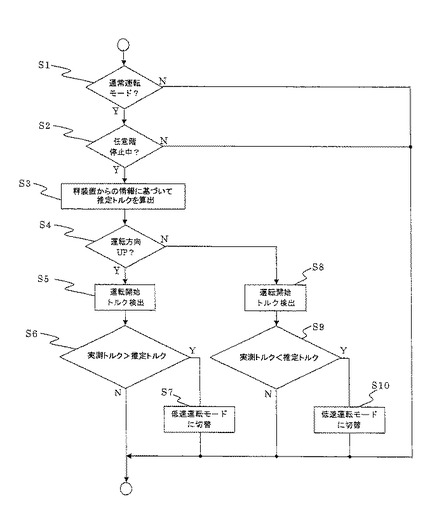
【図3】本発明の第1実施形態の動作を説明するフローチャートである。
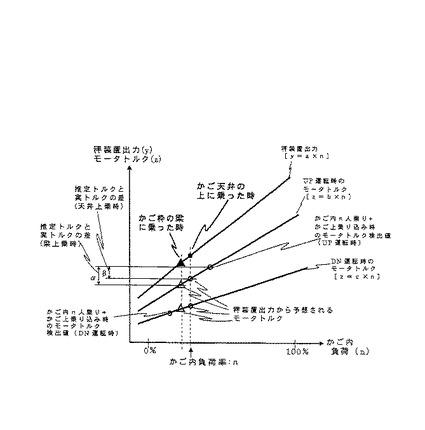
【図4】本発明の第2実施形態に備えられた秤装置によって出力される秤装置の出力とかご内の負荷との関係、及びトルク検出装置によって実測されたモータのトルクとかご内の負荷との関係を示す図である。
【図5】本発明の第2実施形態の動作を説明するフローチャートである。
【発明を実施するための形態】
【0019】
以下、本発明に係るエレベータの保守運転装置を実施するための形態を図に基づいて説明する。
【0020】
[第1実施形態]
本発明に係るエレベータの保守運転装置の第1実施形態は、図1に示すように昇降路1内を昇降するかご2と、両端が昇降路1の天井に固定された主ロープ9と、かご2にこの主ロープ9を介して連結された釣合い錘8と、かご2及び釣合い錘8を昇降させる巻上機5と、かご2内の負荷を計測する後述の負荷計測装置とを備えたエレベータに適用される。なお、主ロープ9が巻き掛けられたプーリ12,13が昇降路2の上部に設けられており、上述した巻上機5は昇降路1の下部に配置されている。
【0021】
また、この巻上機5は、モータ6と、このモータ6の駆動力で回転し、主ロープ9が巻き掛けられた駆動シーブ7とを有し、巻上機5のモータ6には駆動シーブ7のトルクに応じたトルク電流が流れるようになっている。さらに、かご2は、乗車空間を形成するかご室4と、このかご室4を囲み、かご室4を支持するかご枠3と、このかご枠3の下部の両側にそれぞれ設けられ、主ロープ9が巻き掛けられたプーリ10,11とから構成されている。
【0022】
上述した負荷計測装置は、例えばかご枠3のうちかご2の下側に設けられ、かご室4の荷重を実測する秤装置16から成っており、かご室4の下部には乗客がかご2内に乗車したときの衝撃を軽減する防振ゴム15が取付けられている。また、釣合い錘8は、かご2の重量と釣合うように積み重ねられて一体に形成された複数のプレート8aと、上部に設けられ、主ロープ9が巻き掛けられたプーリ14とから構成されている。
【0023】
従って、主ロープ9の一端が昇降路1の上部に固定されると共に、かご2のプーリ10,11、昇降路1の上部のプーリ12、巻上機5の駆動シーブ7、昇降路1の上部のプーリ13、及び釣合い錘8のプーリ14の順に巻き掛けられ、主ロープ9の他端が昇降路1の上部に固定されている。これにより、巻上機5のモータ6が駆動すると、駆動シーブ7が回転し、昇降路1内においてかご2が釣合い錘8と相対的に昇降するようになっている。
【0024】
そして、本発明の第1実施形態は、かご2上に人がいるかどうかを判定し、この判定結果に応じてエレベータの運転を制御する制御装置18を備えている。具体的には、本発明の第1実施形態は、巻上機5の駆動シーブ7のトルクを実測トルクとして実測するトルク検出装置17を備えている。
【0025】
また、制御装置18は、秤装置16によって計測されたかご2内の負荷に基づいて、かご2の運転方向別の駆動シーブ7のトルク、すなわちモータ6のトルクを推定トルクとして演算する推定トルク演算部20と、トルク検出装置17によって実測された実測トルクと推定トルク演算部20によって演算された推定トルクとを比較し、かご2上に人がいるかどうかを判定する判定装置21とを備え、推定トルク演算部20はこの判定装置21の内部に格納されている。
【0026】
また、本発明の第1実施形態では、判定装置21は、トルク検出装置17から実測トルクの情報を受信すると共に、推定トルク演算部20から推定トルクの情報を受信する比較部19を有しており、この比較部19によって実測トルクと推定トルクとの比較が行われるようになっている。
【0027】
さらに、判定装置21は、かご2が上昇する方向へ運転したとき、実測トルクが推定トルクよりも大きければかご2上に人がいると判定し、実測トルクが推定トルクよりも大きくなければかご2上に人がいないと判定し、かご2が下降する方向へ運転したとき、実測トルクが推定トルクよりも小さければかご2上に人がいると判定し、実測トルクが推定トルクよりも小さくなければかご2上に人がいないと判定するようになっている。すなわち、従来の技術では、主ロープ9の引っ掛かりにより比較的大きなトルク変化が起こり、かご2が上昇しようが、下降しようが、主ロープ9の引っ掛かりに起因する実測トルクは、推定トルクより大きくなる場合のみを考慮すればよかった。したがって従来技術では、かごの運転方向別に推定荷重を算出する必要がなかった。ところが、かご2上に人が乗っているかどうかをトルク変化から検出し、判定しようとしたとき、主ロープ9の引っ掛かりとは異なる実測トルクの変化を示すことがわかる。したがって、主ロープ9の引っ掛かりをトルクの変化から検出する技術を適用しても、かごの具体的な運転状況が考慮されていないので、正確な判断が行えるものではない。このように本実施形態では、そもそも主ロープ9の引っ掛かりを想定している従来技術とは異なり、かご2上に人がいるかいないかを判定するためにかご2の具体的な運転方向を考慮し、運転方向に基づき異なる実測トルクと推定トルクに基づく判定方法を適用する構成としている。これにより、トルクからかご2上に人がいるかいないかを判定する検出精度を向上させることができる。
【0028】
本発明の第1実施形態では、制御装置18は、判定装置21によってかご2上に人がいると判定された場合、かご2を通常の速度よりも低い速度で走行させる低速運転にし、判定装置21によってかご2上に人がいないと判定された場合、かご2を通常の速度で走行させる通常運転にする制御を行うようになっている。
【0029】
ここで、図2に示すように秤装置16の出力をy、秤装置16の出力係数をa、かご2内の負荷率(かご2内の人数)をnとすると、秤装置16の出力yはy=a×nの関係式が成立するので、かご2内の負荷率nはn=y/aとなる。従って、推定トルク演算部20は、既知の秤装置16の出力y及び秤装置16の出力係数aを上述のn=y/aに代入してかご2内の負荷率nを求める。
【0030】
そして、かご2が上昇する運転が行われているときには、巻上機2のモータ6のトルク、すなわち推定トルクをz1、モータ6のトルク係数をbとすると、推定トルクz1はz1=b×nの関係式が成立するので、推定トルク演算部20は、求めたかご2内の負荷率nを上述のz1=b×nに代入して推定トルクz1を演算する。そして、トルク検出装置17によって実測された実測トルクをz2とすると、判定装置21の比較部19は、この実測トルクz2と演算された推定トルクz1とを比較し、判定装置21は、実測トルクz2が推定トルクz1よりも大きければかご2上に人がいると判定し、実測トルクz2が推定トルクz1よりも大きくなければかご2上に人がいないと判定するようにしている。
【0031】
一方、かご2が下降する運転が行われているときのモータ6のトルク係数をcとすると、このときの推定トルクz3は、z3=c×nの関係式が成立するので、推定トルク演算部20は、求めたかご2内の負荷率nを上述のz3=c×nに代入して推定トルクz3を演算する。そして、判定装置21の比較部19は、実測トルクz2と演算された推定トルクz3とを比較することにより、判定装置21は、実測トルクz2が推定トルクz3よりも小さければかご2上に人がいると判定し、実測トルクz2が推定トルクz3よりも小さくなければかご2上に人がいないと判定するようにしている。
【0032】
次に、本発明の第1実施形態の動作を図3のフローチャートに基づいて説明する。
【0033】
図3は本発明の第1実施形態の動作を説明するフローチャートである。
【0034】
本発明の第1実施形態では、まず図3に示すように制御装置18は、かご2を通常の速度で走行させる通常運転を行っているかどうかを判断する(ステップ(以下、Sと記す)1)。このとき、制御装置18は通常運転を行っていない、すなわちかご2を通常の速度よりも低い速度で走行させる低速運転を行っていると判断した場合、本発明の第1実施形態の動作を終了する。
【0035】
一方、手順S1において制御装置18は、通常運転を行っていると判断した場合、かご2が昇降路1の任意階に停止しているかどうかを判断する(S2)。このとき、制御装置18は、かご2が昇降路1の任意階に停止していないと判断した場合、本発明の第1実施形態の動作を終了する。
【0036】
手順S2において制御装置18は、かご2が昇降路1の任意階に停止していると判断した場合、判定装置21の推定トルク演算部20は、上述したように秤装置16から出力情報を受信し、秤装置16の出力yとn=y/aの関係式からかご2内の負荷率nを求める。そして、推定トルク演算部20は、かご2内の負荷率nとz1=b×nの関係式から推定トルクz1を演算すると共に、かご2内の負荷率nとz3=c×nの関係式から推定トルクz3を演算する(S3)。
【0037】
次に、制御装置18は、かご2が上昇する方向へ運転を行うのか、あるいはかご2が下降する方向へ運転を行うのかを判断して判定装置21へ入力する(S4)。このとき、制御装置18は、かご2が上昇する方向へ運転を行うと判断して運転を開始すると、トルク検出装置17によって実測トルクを実測する(S5)。そして、判定装置21の比較部19は、実測トルクz2と推定トルクz1とを比較し、実測トルクz2が推定トルクz1よりも大きいかどうかを判断する(S6)。
【0038】
比較部19は、実測トルクz2が推定トルクz1よりも大きいと判断した場合には、判定装置21はかご2上に人がいると判定し、制御装置18は通常運転から低速運転に切替えてかご2を通常の速度よりも低い速度で走行させ(S7)、本発明の第1実施形態の動作を終了する。一方、比較部19は、実測トルクz2が推定トルクz1よりも大きくないと判断した場合には、判定装置21はかご2上に人がいないと判定し、制御装置18はそのまま通常運転を継続してかご2を通常の速度で走行させ、本発明の第1実施形態の動作を終了する。
【0039】
また、手順S4において制御装置18は、かご2が下降する方向へ運転を行うと判断して運転を開始すると、トルク検出装置17によって実測トルクを実測する(S8)。そして、判定装置21の比較部19は、実測トルクz2と推定トルクz3とを比較し、実測トルクz2が推定トルクz3よりも小さいかどうかを判断する(S9)。
【0040】
比較部19は、実測トルクz2が推定トルクz3よりも小さいと判断した場合には、判定装置21はかご2上に人がいると判定し、制御装置18は通常運転から低速運転に切替えてかご2を通常の速度よりも低い速度で走行させ(S10)、本発明の第1実施形態の動作を終了する。一方、比較部19は、実測トルクz2が推定トルクz3よりも小さくないと判断した場合には、判定装置21はかご2上に人がいないと判定し、制御装置18はそのまま通常運転を継続してかご2を通常の速度で走行させ、本発明の第1実施形態の動作を終了する。
【0041】
このように構成した本発明の第1実施形態によれば、図2に示すようにかご2が上昇する方向へ運転が行われているときに得られる推定トルクz1は、かご2が下降する方向へ運転が行われているときに得られる推定トルクz3に対して異なる値になるので、推定トルク演算部20は、秤装置16から受信した出力の情報に基づいて、n=y/aの関係式からかご2内の負荷率nを求め、その後z1=b×n及びz3=c×nの関係式からかご2の運転方向別の推定トルクz1,z3を演算するようにしている。そして、手順S6及び手順S9において判定装置21は、この演算された推定トルクz1,z3をトルク検出装置17で実測された実測トルクz2の比較対照とすることにより、かご2の具体的な運転状況に合わせてかご2上に人がいるかどうかを適切に判定することができる。
【0042】
このように、エレベータに既設された秤装置16を用いて判定装置21の推定トルク演算部20でかご2の運転方向別のモータ6のトルクを推定することにより、かご2上に新たな機器を設置しなくても、判定装置21の判定結果からかご2上に人がいるかどうかを正確に把握することができ、判定装置21によるかご2上の人の検出精度を向上させることができる。これにより、制御装置18が判定装置21の判定結果に応じてエレベータの運転を制御することにより、かご2上での作業においてエレベータに対する高い信頼性を確保することができる。
【0043】
また、本発明の第1実施形態は、図2に示すようにかご2が上昇する方向へ運転したときにかご2上に人がいる場合には、かご2上の人の負荷が加算されることにより、モータ6のトルクが大きくなる。一方、かご2が下降する方向へ運転したときにかご2上に人がいる場合には、かご2上の人の負荷が差し引かれることにより、モータ6のトルクが小さくなる。従って、判定装置21は、手順S4におけるかご2の運転方向に応じて、手順S6及び手順S9において推定トルクz1,z3の値に対する判定の判断を変更することにより、かご2上に人がいるかどうかを的確に判別することができる。
【0044】
また、本発明の第1実施形態は、制御装置18は、手順S6及び手順S9において判定装置21によってかご2上に人がいると判定された場合に、手順S7及び手順S10においてかご2を通常の速度よりも低い速度で走行させる低速運転に制御することにより、かご2が急速に動くこともないので、かご2上にいる人が安心して作業を進行することができる。これにより、エレベータの安全性を向上させると共に、作業性を高めることができる。さらに制御装置18は、手順S6及び手順S9において判定装置21によってかご2上に人がいないと判定された場合に、かご2を通常の速度で走行させる通常運転に制御することにより、乗客がエレベータを通常通りに利用できない時間を省くことができるので、エレベータを効率良く運転させることができる。これにより、乗客に対するサービス性を高めることができる。
【0045】
[第2実施形態]
本発明の第2実施形態が前述した第1実施形態と異なるのは、第1実施形態の構成に加え、第2実施形態は、判定装置21は、実測トルクz2と推定トルクz1,z3との差を演算する図示しないトルク差演算手段を有し、このトルク差演算手段によって演算された実測トルクz2と推定トルクz1,z3との差が所定の値より大きければかご2上の人がかご枠3の梁上にいると判定し、トルク差演算手段によって演算された実測トルクz2と推定トルクz1,z3との差が所定の値より大きくなければ、かご2上の人がかご室4の天井にいると判定するようにしたことである。また、本発明の第2実施形態は、判定装置21によってかご2上の人がかご枠3の梁上にいると判定された場合にかご2上にいる人に注意を喚起する図示しない喚起手段を備えている。この喚起手段は、例えば昇降路1内に設けられ、予め録音された音声を発するスピーカから成っている。
【0046】
ここで、本発明の第2実施形態では、人がかご2内にいる場合には、人の荷重がかご室4の床から防振ゴム15及び秤装置16へ直接かかることになるが、人がかご枠3の梁上いる場合には、人の荷重が秤装置16へかからず、人がかご室4の天井にいる場合には、人の荷重がかご室4の全体から防振ゴム15及び秤装置16へかかることになる。そのため、図4に示すように人がかご室4の天井にいるときの秤装置16の出力のほうが人がかご枠3上にいるときの秤装置16の出力よりも大きな値になり、人がかご室4の天井にいるときの推定トルクz1,z3のほうが人がかご枠3上にいるときの推定トルクz1,z3よりも大きな値になる。
【0047】
一方、かご枠3の梁上にいるのか、あるいは人がかご室4の天井にいるのかに拘わらず、トルク検出装置17によって実測される実測トルクz2は同じ値になる。従って、人がかご枠3の梁上にいるときに、トルク差演算手段によって演算される実測トルクz2と推定トルクz1,z3との差をαとし、人がかご室4の天井にいるときに、トルク差演算手段によって演算される実測トルクz2と推定トルクz1,z3との差をβとすると、α>βとなる。なお、α及びβは絶対値をとるようにしている。
【0048】
具体的には、人がかご室4の天井にいるときの秤装置16の出力を人がかご2内にいるときの秤装置16の出力の半分、すなわち0.5人分に仮定すると、人がかご2内及びかご枠3上にそれぞれ一人ずついる場合には、秤装置16の出力は一人分になり、推定トルクz1,z3も一人分になる。一方、トルク検出装置17によって実測される実測トルクz2はかご2内及びかご枠3上の二人分となる。従って、トルク差演算手段によって演算される実測トルクz2と推定トルクz1,z3との差は一人分となる。
【0049】
また、人がかご2内及びかご室4の天井にそれぞれ一人ずついる場合には、秤装置16の出力は1.5人分になり、推定トルクz1,z3も1.5人分になる。一方、トルク検出装置17によって実測される実測トルクz2はかご2内及びかご室4の天井の二人分となる。従って、トルク差演算手段によって演算される実測トルクz2と推定トルクz1,z3との差は0.5人分となる。このように、人がかご枠3上にいるときの実測トルクz2と推定トルクz1,z3との差αのほうが人がかご室4の天井にいるときの実測トルクz2と推定トルクz1,z3との差βよりも大きくなる。
【0050】
次に、本発明の第2実施形態の動作を図5のフローチャートに基づいて説明する。なお、本発明の第2実施形態の動作は、第1実施形態の動作において手順S7の後に後述の手順S21〜23を追加し、手順S10の後に後述の手順S31〜33を追加したものであり、上述した手順S1〜10における各動作の説明を省略する。
【0051】
図5は本発明の第2実施形態の動作を説明するフローチャートである。
【0052】
本発明の第2実施形態では、図5に示すように手順S7の後、判定装置21のトルク差演算手段は実測トルクz2と推定トルクz1との差を演算し(S21)、演算した実測トルクz2と推定トルクz1との差が所定の値より大きいかどうかを判断する(S22)。このとき、トルク差演算手段は、実測トルクz2と推定トルクz1との差が所定の値より大きいと判断した場合には、判定装置21はかご2上の人がかご枠3の梁上にいると判定し、かご2上の人に向けてスピーカで音声を発する(S23)。そして、本発明の第2実施形態の動作を終了する。一方、手順S22においてトルク差演算手段は、実測トルクz2と推定トルクz1との差が所定の値より大きくないと判断した場合には、判定装置21はかご2上の人がかご室4の天井にいると判定し、本発明の第2実施形態の動作を終了する。
【0053】
また、手順S10の後、判定装置21のトルク差演算手段は実測トルクz2と推定トルクz3との差を演算し(S31)、演算した実測トルクz2と推定トルクz3との差が所定の値より大きいかどうかを判断する(S32)。このとき、トルク差演算手段は、実測トルクz2と推定トルクz3との差が所定の値より大きいと判断した場合には、判定装置21はかご2上の人がかご枠3の梁上にいると判定し、かご2上の人に向けてスピーカで音声を発する(S33)。そして、本発明の第2実施形態の動作を終了する。一方、手順S32においてトルク差演算手段は、実測トルクz2と推定トルクz3との差が所定の値より大きくないと判断した場合には、判定装置21はかご2上の人がかご室4の天井にいると判定し、本発明の第2実施形態の動作を終了する。
【0054】
このように構成した本発明の第2実施形態によれば、かご2上の人がかご枠3の梁上にいるときに秤装置16にかかる荷重は、かご2上の人がかご室4の天井にいるときに秤装置16にかかる荷重に対して異なる値になるので、秤装置16によって実測された出力y、n=y/a、z1=b×n、及びz3=c×nの関係式から演算される推定トルクz1,z3もそれぞれ異なる値となる。そのため、判定装置21は、手順S22及び手順S32においてトルク差演算手段によって演算されたトルク差と所定の値とを比較することにより、かご2上にいる人がかご枠3の梁上にいるのか、あるいはかご室4の天井にいるのかを明確に区別することができる。このように、かご2上に人がいるかどうかだけでなく、かご2上の人の位置まで特定できるので、かご2上の人の位置に応じた適切な処置を行うことができる。本発明の第2実施形態では、手順S23及び手順S33において判定装置21によってかご2上の人がかご枠3の梁上にいると判定された場合に、スピーカで音声を発することにより、かご枠3の梁上にいる人に注意を喚起することができる。
【0055】
なお、上述した本発明の第1、第2実施形態は、判定装置21は、かご2が上昇する方向へ運転したとき、実測トルクz2が推定トルクz1よりも大きければかご2上に人がいると判定し、実測トルクz2が推定トルクz1よりも大きくなければかご2上に人がいないと判定し、かご2が下降する方向へ運転したとき、実測トルクz2が推定トルクz3よりも小さければかご2上に人がいると判定し、実測トルクz2が推定トルクz3よりも小さくなければかご2上に人がいないと判定した場合について説明したが、この場合に限らず、例えば判定装置21は、実測トルクz2と推定トルクz1,z3との差を演算するトルク差演算手段と、このトルク差演算手段によって演算された実測トルクz2と推定トルクz1,z3との差が予め設定された閾値よりも小さい場合に誤差とみなす誤差判定手段とを有していても良い。なお、トルク差演算手段によって演算される実測トルクz2と推定トルクz1,z3との差は絶対値をとるようにしている。
【0056】
すなわち、判定装置21は、かご2が上昇する方向へ運転したとき、実測トルクz2が推定トルクz1より大きくても、トルク差演算手段によって演算された実測トルクz2と推定トルクz1との差が閾値よりも小さければ誤差判定手段で誤差とみなされ、かご2上に人がいないと判定し、かご2が下降する方向へ運転したとき、実測トルクz2が推定トルクz3より小さくても、トルク差演算手段によって演算された実測トルクz2と推定トルクz3との差が閾値よりも小さければ誤差判定手段で誤差とみなされ、かご2上に人がいないと判定するようにしても良い。これにより、誤差判定手段によって判定装置21によるかご2上の人の検出精度をさらに向上させることができる。
【符号の説明】
【0057】
1 昇降路
2 かご
3 かご枠
4 かご室
5 巻上機
6 モータ
7 駆動シーブ
15 防振ゴム
16 秤装置(負荷計測装置)
17 トルク検出装置
18 制御装置
19 比較部
20 推定トルク演算部
21 判定装置
【技術分野】
【0001】
本発明は、かご上に人がいるかどうかを判定し、この判定結果に応じてエレベータの運転を制御する制御装置を備えたエレベータの保守運転装置に関する。
【背景技術】
【0002】
一般的に、エレベータの保守作業は、保守員がエレベータのかご上に乗った状態で行われる。このとき、乗客を運ぶときのようにかごを通常の速度で昇降させる通常運転が行われることは好ましくないので、従来よりかごを通常の速度よりも低い速度で昇降させる低速運転が行われ、かご上で作業を行う保守員の安全が確保されている。そして、エレベータには、かご上に人がいるときに誤って通常運転が行われることを防止する各種の装置が設けられている。
【0003】
この種の装置の従来技術の1つとして、エレベータの運転を通常運転から低速運転へ切り替える切替スイッチと、かご上にいる人を検出する検出器と、この検出器の検出結果に応じてエレベータの運転を制御する制御装置とを備え、この制御装置は、切替スイッチを通常運転に切り替えたときに検出器が作動すると、通常運転を無効にするエレベータの運転装置が知られている(例えば、特許文献1参照)。
【0004】
また、かご上に人がいるときに通常運転が行われることを防止する装置ではないが、これに関連する従来技術の1つとして、昇降路内を昇降するかごと、このかごに主ロープを介して連結された釣合い錘と、かご及び釣合い錘を昇降させる巻上機と、この巻上機は、主ロープが巻き掛けられて回転する駆動シーブを有するエレベータに設けられた自動点検装置も知られている(例えば、特許文献2参照)。この従来技術のエレベータの自動点検装置は、かごの荷重を検出荷重として検出する荷重検出装置と、巻上機の駆動シーブの回転トルクを検出するトルク検出装置と、このトルク検出装置からの情報に基づいて、かごの荷重を推定荷重として求め、検出荷重と推定荷重とを比較することにより、エレベータの異常の有無、例えば主ロープが昇降路内の機器に引っ掛かっているかどうかを判定する判定装置を備えている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平07−137947号公報
【特許文献2】特開2007−112538号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ここで、特許文献1に開示された従来技術のエレベータの運転装置では、上述したようにかご上にいる人を検出する検出器を備えており、この検出器として例えば赤外線センサを用いてかご上に赤外線を発して人を検知するようにしている。しかしながら、かご上には主ロープの一端やプーリ等の設備機器が設置されてかご上の配置構造が複雑になっているので、これらの設備機器が障害となってかご上で赤外線が当たらない場所が生じ、この場所で作業を行っている人を赤外線で上手く検出できないことが問題となっている。この場合には、複数の赤外線センサをかご上の異なる場所に設けたり、あるいは赤外線センサを設置する前に赤外線センサの検出範囲を十分に検討する必要があるので、赤外線センサの設置作業が煩雑になることが懸念されている。
【0007】
また、特許文献2に開示された従来技術のエレベータの自動点検装置は、地震発生後のエレベータの点検を自動的に行って主ロープの引っ掛かりを検出するものであるが、この装置の荷重検出装置によって検出された検出荷重と、トルク検出装置からの情報に基づいて算出された推定荷重とを比較して判定装置でかご上の人を検出することに応用することも考えられる。しかし、従来技術のエレベータの自動点検装置では、主ロープの引っ掛かりを検出するためのものであり、判定装置によるかご上の人の存在を検出するものではないので、判定装置によってかご上に人が存在するか否かを検出するには異なる判定方法を適用する必要がある。このように、従来技術のエレベータの自動点検装置の構成では、かご上に人がいるかどうかを正確に把握することができるものではなかった。
【0008】
本発明は、このような従来技術の実情からなされたもので、その目的は、かご上に新たな機器を設置しなくても、かご上に人がいるかどうかを正確に把握することができるエレベータの保守運転装置を提供することにある。
【課題を解決するための手段】
【0009】
上記の目的を達成するために、本発明のエレベータの保守運転装置は、昇降路内を昇降するかごと、このかごに主ロープを介して連結された釣合い錘と、前記かご及び前記釣合い錘を昇降させる巻上機と、前記かご内の負荷を計測する負荷計測装置とを備え、前記巻上機は、前記主ロープが巻き掛けられて回転する駆動シーブを有するエレベータに適用され、前記かご上に人がいるかどうかを判定し、この判定結果に応じて前記エレベータの運転を制御する制御装置を備えたエレベータの保守運転装置において、前記駆動シーブのトルクを実測トルクとして実測するトルク検出装置と、前記負荷計測装置によって計測された前記かご内の負荷に基づいて、前記かごの運転方向別の前記駆動シーブのトルクを推定トルクとして演算する推定トルク演算部と、前記トルク検出装置によって実測された前記実測トルクと前記推定トルク演算部によって演算された前記推定トルクとを比較し、前記かご上に人がいるかどうかを判定する判定装置とを備えたことを特徴としている。
【0010】
このように構成した本発明は、かごが上昇する運転が行われているときに得られる巻上機の駆動シーブのトルクは、かごが下降する運転が行われているときに得られる駆動シーブのトルクに対して異なる値になるので、推定トルク演算部は、負荷計測装置によって計測されたかご内の負荷に基づいて、かごの運転方向別の駆動シーブのトルクを推定トルクとして演算するようにしている。そして、判定装置は、この演算された推定トルクをトルク検出装置で実測された実測トルクの比較対照とすることにより、かごの具体的な運転状況に合わせてかご上に人がいるかどうかを適切に判定することができる。このように、エレベータに既設された負荷計測装置を用いて推定トルク演算部でかごの運転方向別の駆動シーブのトルクを推定することにより、かご上に新たな機器を設置しなくても、判定装置の判定結果からかご上に人がいるかどうかを正確に把握することができる。
【0011】
また、本発明に係るエレベータの保守運転装置は、前記発明において、前記判定装置は、前記かごが上昇する方向へ運転したとき、前記実測トルクが前記推定トルクよりも大きければ前記かご上に人がいると判定し、前記実測トルクが前記推定トルクよりも大きくなければ前記かご上に人がいないと判定し、前記かごが下降する方向へ運転したとき、前記実測トルクが前記推定トルクよりも小さければ前記かご上に人がいると判定し、前記実測トルクが前記推定トルクよりも小さくなければ前記かご上に人がいないと判定することを特徴としている。
【0012】
このように構成した本発明は、かごが上昇する方向へ運転したときにかご上に人がいる場合には、かご上の人の負荷が加算されることにより、駆動シーブのトルクが大きくなる。一方、かごが下降する方向へ運転したときにかご上に人がいる場合には、かご上の人の負荷が差し引かれることにより、駆動シーブのトルクが小さくなる。従って、判定装置は、かごの運転方向に応じて推定トルクの値に対する判定の判断を変更することにより、かご上に人がいるかどうかを的確に判別することができる。
【0013】
また、本発明に係るエレベータの保守運転装置は、前記発明において、前記かごは、乗車空間を形成するかご室と、このかご室を囲み、前記かご室を支持するかご枠とから少なくとも構成され、前記負荷計測装置は、前記かご枠のうち前記かごの下側に設けられ、前記かご室の荷重を実測する秤装置から成り、前記判定装置は、前記実測トルクと前記推定トルクとの差を演算するトルク差演算手段を有し、このトルク差演算手段によって演算された前記実測トルクと前記推定トルクとの差が所定の値より大きければ前記かご上の人が前記かご枠の梁上にいると判定し、前記トルク差演算手段によって演算された前記実測トルクと前記推定トルクとの差が前記所定の値より大きくなければ、前記かご上の人が前記かご室の天井にいると判定することを特徴としている。
【0014】
このように構成した本発明は、かご上の人がかご枠の梁上にいるときに計測される負荷は、かご上の人がかご室の天井にいるときに計測される負荷に対して異なる値になるので、負荷計測装置によって計測されたかご内の負荷に基づいて演算される推定トルクもそれぞれ異なる値となる。そのため、判定装置は、トルク差演算手段によって演算されたトルク差と所定の値とを比較することにより、かご上にいる人がかご枠の梁上にいるのか、あるいはかご室の天井にいるのかを明確に区別することができる。このように、かご上に人がいるかどうかだけでなく、かご上の人の位置まで特定できるので、かご上の人の位置に応じた適切な処置を行うことができる。
【0015】
また、本発明に係るエレベータの保守運転装置は、前記発明において、前記制御装置は、前記判定装置によって前記かご上に人がいると判定された場合、前記かごを通常の速度よりも低い速度で走行させる低速運転にし、前記判定装置によって前記かご上に人がいないと判定された場合、前記かごを通常の速度で走行させる通常運転にする制御を行うことを特徴としている。
【0016】
このように構成した本発明は、判定装置によってかご上に人がいると判定された場合には、かごが通常の速度で走行し、エレベータの運転が急に低速運転から通常運転へ切替ることもないので、かご上にいる人が安心して作業を進行することができる。一方、判定装置によってかご上に人がいないと判定された場合には、エレベータの運転を低速運転から通常運転へ切り替えたり、あるいは通常運転を維持することにより、乗客がエレベータを通常通りに利用できない時間を省くことができる。
【発明の効果】
【0017】
本発明のエレベータの保守運転装置は、駆動シーブのトルクを実測トルクとして実測するトルク検出装置と、負荷計測装置によって計測されたかご内の負荷に基づいて、かごの運転方向別の駆動シーブのトルクを推定トルクとして演算する推定トルク演算部と、トルク検出装置によって実測された実測トルクと推定トルク演算部によって演算された推定トルクとを比較し、かご上に人がいるかどうかを判定する判定装置と、この判定装置の判定結果に応じてエレベータの運転を制御する制御装置とを備えている。従って、エレベータに既設された負荷計測装置を用いて推定トルク演算部でかごの運転方向別の駆動シーブのトルクを推定することにより、かご上に新たな機器を設置しなくても、判定装置の判定結果からかご上に人がいるかどうかを正確に把握することができ、従来よりも判定装置によるかご上の人の検出精度を向上させることができる。これにより、制御装置が判定装置の判定結果に応じてエレベータの運転を制御することにより、かご上での作業においてエレベータに対する高い信頼性を確保することができる。
【図面の簡単な説明】
【0018】
【図1】本発明に係るエレベータの保守運転装置の第1実施形態の構成を示す図である。
【図2】図1に示す秤装置によって出力される秤装置の出力とかご内の負荷との関係、及びトルク検出装置によって実測されたモータのトルクとかご内の負荷との関係を示す図である。
【図3】本発明の第1実施形態の動作を説明するフローチャートである。
【図4】本発明の第2実施形態に備えられた秤装置によって出力される秤装置の出力とかご内の負荷との関係、及びトルク検出装置によって実測されたモータのトルクとかご内の負荷との関係を示す図である。
【図5】本発明の第2実施形態の動作を説明するフローチャートである。
【発明を実施するための形態】
【0019】
以下、本発明に係るエレベータの保守運転装置を実施するための形態を図に基づいて説明する。
【0020】
[第1実施形態]
本発明に係るエレベータの保守運転装置の第1実施形態は、図1に示すように昇降路1内を昇降するかご2と、両端が昇降路1の天井に固定された主ロープ9と、かご2にこの主ロープ9を介して連結された釣合い錘8と、かご2及び釣合い錘8を昇降させる巻上機5と、かご2内の負荷を計測する後述の負荷計測装置とを備えたエレベータに適用される。なお、主ロープ9が巻き掛けられたプーリ12,13が昇降路2の上部に設けられており、上述した巻上機5は昇降路1の下部に配置されている。
【0021】
また、この巻上機5は、モータ6と、このモータ6の駆動力で回転し、主ロープ9が巻き掛けられた駆動シーブ7とを有し、巻上機5のモータ6には駆動シーブ7のトルクに応じたトルク電流が流れるようになっている。さらに、かご2は、乗車空間を形成するかご室4と、このかご室4を囲み、かご室4を支持するかご枠3と、このかご枠3の下部の両側にそれぞれ設けられ、主ロープ9が巻き掛けられたプーリ10,11とから構成されている。
【0022】
上述した負荷計測装置は、例えばかご枠3のうちかご2の下側に設けられ、かご室4の荷重を実測する秤装置16から成っており、かご室4の下部には乗客がかご2内に乗車したときの衝撃を軽減する防振ゴム15が取付けられている。また、釣合い錘8は、かご2の重量と釣合うように積み重ねられて一体に形成された複数のプレート8aと、上部に設けられ、主ロープ9が巻き掛けられたプーリ14とから構成されている。
【0023】
従って、主ロープ9の一端が昇降路1の上部に固定されると共に、かご2のプーリ10,11、昇降路1の上部のプーリ12、巻上機5の駆動シーブ7、昇降路1の上部のプーリ13、及び釣合い錘8のプーリ14の順に巻き掛けられ、主ロープ9の他端が昇降路1の上部に固定されている。これにより、巻上機5のモータ6が駆動すると、駆動シーブ7が回転し、昇降路1内においてかご2が釣合い錘8と相対的に昇降するようになっている。
【0024】
そして、本発明の第1実施形態は、かご2上に人がいるかどうかを判定し、この判定結果に応じてエレベータの運転を制御する制御装置18を備えている。具体的には、本発明の第1実施形態は、巻上機5の駆動シーブ7のトルクを実測トルクとして実測するトルク検出装置17を備えている。
【0025】
また、制御装置18は、秤装置16によって計測されたかご2内の負荷に基づいて、かご2の運転方向別の駆動シーブ7のトルク、すなわちモータ6のトルクを推定トルクとして演算する推定トルク演算部20と、トルク検出装置17によって実測された実測トルクと推定トルク演算部20によって演算された推定トルクとを比較し、かご2上に人がいるかどうかを判定する判定装置21とを備え、推定トルク演算部20はこの判定装置21の内部に格納されている。
【0026】
また、本発明の第1実施形態では、判定装置21は、トルク検出装置17から実測トルクの情報を受信すると共に、推定トルク演算部20から推定トルクの情報を受信する比較部19を有しており、この比較部19によって実測トルクと推定トルクとの比較が行われるようになっている。
【0027】
さらに、判定装置21は、かご2が上昇する方向へ運転したとき、実測トルクが推定トルクよりも大きければかご2上に人がいると判定し、実測トルクが推定トルクよりも大きくなければかご2上に人がいないと判定し、かご2が下降する方向へ運転したとき、実測トルクが推定トルクよりも小さければかご2上に人がいると判定し、実測トルクが推定トルクよりも小さくなければかご2上に人がいないと判定するようになっている。すなわち、従来の技術では、主ロープ9の引っ掛かりにより比較的大きなトルク変化が起こり、かご2が上昇しようが、下降しようが、主ロープ9の引っ掛かりに起因する実測トルクは、推定トルクより大きくなる場合のみを考慮すればよかった。したがって従来技術では、かごの運転方向別に推定荷重を算出する必要がなかった。ところが、かご2上に人が乗っているかどうかをトルク変化から検出し、判定しようとしたとき、主ロープ9の引っ掛かりとは異なる実測トルクの変化を示すことがわかる。したがって、主ロープ9の引っ掛かりをトルクの変化から検出する技術を適用しても、かごの具体的な運転状況が考慮されていないので、正確な判断が行えるものではない。このように本実施形態では、そもそも主ロープ9の引っ掛かりを想定している従来技術とは異なり、かご2上に人がいるかいないかを判定するためにかご2の具体的な運転方向を考慮し、運転方向に基づき異なる実測トルクと推定トルクに基づく判定方法を適用する構成としている。これにより、トルクからかご2上に人がいるかいないかを判定する検出精度を向上させることができる。
【0028】
本発明の第1実施形態では、制御装置18は、判定装置21によってかご2上に人がいると判定された場合、かご2を通常の速度よりも低い速度で走行させる低速運転にし、判定装置21によってかご2上に人がいないと判定された場合、かご2を通常の速度で走行させる通常運転にする制御を行うようになっている。
【0029】
ここで、図2に示すように秤装置16の出力をy、秤装置16の出力係数をa、かご2内の負荷率(かご2内の人数)をnとすると、秤装置16の出力yはy=a×nの関係式が成立するので、かご2内の負荷率nはn=y/aとなる。従って、推定トルク演算部20は、既知の秤装置16の出力y及び秤装置16の出力係数aを上述のn=y/aに代入してかご2内の負荷率nを求める。
【0030】
そして、かご2が上昇する運転が行われているときには、巻上機2のモータ6のトルク、すなわち推定トルクをz1、モータ6のトルク係数をbとすると、推定トルクz1はz1=b×nの関係式が成立するので、推定トルク演算部20は、求めたかご2内の負荷率nを上述のz1=b×nに代入して推定トルクz1を演算する。そして、トルク検出装置17によって実測された実測トルクをz2とすると、判定装置21の比較部19は、この実測トルクz2と演算された推定トルクz1とを比較し、判定装置21は、実測トルクz2が推定トルクz1よりも大きければかご2上に人がいると判定し、実測トルクz2が推定トルクz1よりも大きくなければかご2上に人がいないと判定するようにしている。
【0031】
一方、かご2が下降する運転が行われているときのモータ6のトルク係数をcとすると、このときの推定トルクz3は、z3=c×nの関係式が成立するので、推定トルク演算部20は、求めたかご2内の負荷率nを上述のz3=c×nに代入して推定トルクz3を演算する。そして、判定装置21の比較部19は、実測トルクz2と演算された推定トルクz3とを比較することにより、判定装置21は、実測トルクz2が推定トルクz3よりも小さければかご2上に人がいると判定し、実測トルクz2が推定トルクz3よりも小さくなければかご2上に人がいないと判定するようにしている。
【0032】
次に、本発明の第1実施形態の動作を図3のフローチャートに基づいて説明する。
【0033】
図3は本発明の第1実施形態の動作を説明するフローチャートである。
【0034】
本発明の第1実施形態では、まず図3に示すように制御装置18は、かご2を通常の速度で走行させる通常運転を行っているかどうかを判断する(ステップ(以下、Sと記す)1)。このとき、制御装置18は通常運転を行っていない、すなわちかご2を通常の速度よりも低い速度で走行させる低速運転を行っていると判断した場合、本発明の第1実施形態の動作を終了する。
【0035】
一方、手順S1において制御装置18は、通常運転を行っていると判断した場合、かご2が昇降路1の任意階に停止しているかどうかを判断する(S2)。このとき、制御装置18は、かご2が昇降路1の任意階に停止していないと判断した場合、本発明の第1実施形態の動作を終了する。
【0036】
手順S2において制御装置18は、かご2が昇降路1の任意階に停止していると判断した場合、判定装置21の推定トルク演算部20は、上述したように秤装置16から出力情報を受信し、秤装置16の出力yとn=y/aの関係式からかご2内の負荷率nを求める。そして、推定トルク演算部20は、かご2内の負荷率nとz1=b×nの関係式から推定トルクz1を演算すると共に、かご2内の負荷率nとz3=c×nの関係式から推定トルクz3を演算する(S3)。
【0037】
次に、制御装置18は、かご2が上昇する方向へ運転を行うのか、あるいはかご2が下降する方向へ運転を行うのかを判断して判定装置21へ入力する(S4)。このとき、制御装置18は、かご2が上昇する方向へ運転を行うと判断して運転を開始すると、トルク検出装置17によって実測トルクを実測する(S5)。そして、判定装置21の比較部19は、実測トルクz2と推定トルクz1とを比較し、実測トルクz2が推定トルクz1よりも大きいかどうかを判断する(S6)。
【0038】
比較部19は、実測トルクz2が推定トルクz1よりも大きいと判断した場合には、判定装置21はかご2上に人がいると判定し、制御装置18は通常運転から低速運転に切替えてかご2を通常の速度よりも低い速度で走行させ(S7)、本発明の第1実施形態の動作を終了する。一方、比較部19は、実測トルクz2が推定トルクz1よりも大きくないと判断した場合には、判定装置21はかご2上に人がいないと判定し、制御装置18はそのまま通常運転を継続してかご2を通常の速度で走行させ、本発明の第1実施形態の動作を終了する。
【0039】
また、手順S4において制御装置18は、かご2が下降する方向へ運転を行うと判断して運転を開始すると、トルク検出装置17によって実測トルクを実測する(S8)。そして、判定装置21の比較部19は、実測トルクz2と推定トルクz3とを比較し、実測トルクz2が推定トルクz3よりも小さいかどうかを判断する(S9)。
【0040】
比較部19は、実測トルクz2が推定トルクz3よりも小さいと判断した場合には、判定装置21はかご2上に人がいると判定し、制御装置18は通常運転から低速運転に切替えてかご2を通常の速度よりも低い速度で走行させ(S10)、本発明の第1実施形態の動作を終了する。一方、比較部19は、実測トルクz2が推定トルクz3よりも小さくないと判断した場合には、判定装置21はかご2上に人がいないと判定し、制御装置18はそのまま通常運転を継続してかご2を通常の速度で走行させ、本発明の第1実施形態の動作を終了する。
【0041】
このように構成した本発明の第1実施形態によれば、図2に示すようにかご2が上昇する方向へ運転が行われているときに得られる推定トルクz1は、かご2が下降する方向へ運転が行われているときに得られる推定トルクz3に対して異なる値になるので、推定トルク演算部20は、秤装置16から受信した出力の情報に基づいて、n=y/aの関係式からかご2内の負荷率nを求め、その後z1=b×n及びz3=c×nの関係式からかご2の運転方向別の推定トルクz1,z3を演算するようにしている。そして、手順S6及び手順S9において判定装置21は、この演算された推定トルクz1,z3をトルク検出装置17で実測された実測トルクz2の比較対照とすることにより、かご2の具体的な運転状況に合わせてかご2上に人がいるかどうかを適切に判定することができる。
【0042】
このように、エレベータに既設された秤装置16を用いて判定装置21の推定トルク演算部20でかご2の運転方向別のモータ6のトルクを推定することにより、かご2上に新たな機器を設置しなくても、判定装置21の判定結果からかご2上に人がいるかどうかを正確に把握することができ、判定装置21によるかご2上の人の検出精度を向上させることができる。これにより、制御装置18が判定装置21の判定結果に応じてエレベータの運転を制御することにより、かご2上での作業においてエレベータに対する高い信頼性を確保することができる。
【0043】
また、本発明の第1実施形態は、図2に示すようにかご2が上昇する方向へ運転したときにかご2上に人がいる場合には、かご2上の人の負荷が加算されることにより、モータ6のトルクが大きくなる。一方、かご2が下降する方向へ運転したときにかご2上に人がいる場合には、かご2上の人の負荷が差し引かれることにより、モータ6のトルクが小さくなる。従って、判定装置21は、手順S4におけるかご2の運転方向に応じて、手順S6及び手順S9において推定トルクz1,z3の値に対する判定の判断を変更することにより、かご2上に人がいるかどうかを的確に判別することができる。
【0044】
また、本発明の第1実施形態は、制御装置18は、手順S6及び手順S9において判定装置21によってかご2上に人がいると判定された場合に、手順S7及び手順S10においてかご2を通常の速度よりも低い速度で走行させる低速運転に制御することにより、かご2が急速に動くこともないので、かご2上にいる人が安心して作業を進行することができる。これにより、エレベータの安全性を向上させると共に、作業性を高めることができる。さらに制御装置18は、手順S6及び手順S9において判定装置21によってかご2上に人がいないと判定された場合に、かご2を通常の速度で走行させる通常運転に制御することにより、乗客がエレベータを通常通りに利用できない時間を省くことができるので、エレベータを効率良く運転させることができる。これにより、乗客に対するサービス性を高めることができる。
【0045】
[第2実施形態]
本発明の第2実施形態が前述した第1実施形態と異なるのは、第1実施形態の構成に加え、第2実施形態は、判定装置21は、実測トルクz2と推定トルクz1,z3との差を演算する図示しないトルク差演算手段を有し、このトルク差演算手段によって演算された実測トルクz2と推定トルクz1,z3との差が所定の値より大きければかご2上の人がかご枠3の梁上にいると判定し、トルク差演算手段によって演算された実測トルクz2と推定トルクz1,z3との差が所定の値より大きくなければ、かご2上の人がかご室4の天井にいると判定するようにしたことである。また、本発明の第2実施形態は、判定装置21によってかご2上の人がかご枠3の梁上にいると判定された場合にかご2上にいる人に注意を喚起する図示しない喚起手段を備えている。この喚起手段は、例えば昇降路1内に設けられ、予め録音された音声を発するスピーカから成っている。
【0046】
ここで、本発明の第2実施形態では、人がかご2内にいる場合には、人の荷重がかご室4の床から防振ゴム15及び秤装置16へ直接かかることになるが、人がかご枠3の梁上いる場合には、人の荷重が秤装置16へかからず、人がかご室4の天井にいる場合には、人の荷重がかご室4の全体から防振ゴム15及び秤装置16へかかることになる。そのため、図4に示すように人がかご室4の天井にいるときの秤装置16の出力のほうが人がかご枠3上にいるときの秤装置16の出力よりも大きな値になり、人がかご室4の天井にいるときの推定トルクz1,z3のほうが人がかご枠3上にいるときの推定トルクz1,z3よりも大きな値になる。
【0047】
一方、かご枠3の梁上にいるのか、あるいは人がかご室4の天井にいるのかに拘わらず、トルク検出装置17によって実測される実測トルクz2は同じ値になる。従って、人がかご枠3の梁上にいるときに、トルク差演算手段によって演算される実測トルクz2と推定トルクz1,z3との差をαとし、人がかご室4の天井にいるときに、トルク差演算手段によって演算される実測トルクz2と推定トルクz1,z3との差をβとすると、α>βとなる。なお、α及びβは絶対値をとるようにしている。
【0048】
具体的には、人がかご室4の天井にいるときの秤装置16の出力を人がかご2内にいるときの秤装置16の出力の半分、すなわち0.5人分に仮定すると、人がかご2内及びかご枠3上にそれぞれ一人ずついる場合には、秤装置16の出力は一人分になり、推定トルクz1,z3も一人分になる。一方、トルク検出装置17によって実測される実測トルクz2はかご2内及びかご枠3上の二人分となる。従って、トルク差演算手段によって演算される実測トルクz2と推定トルクz1,z3との差は一人分となる。
【0049】
また、人がかご2内及びかご室4の天井にそれぞれ一人ずついる場合には、秤装置16の出力は1.5人分になり、推定トルクz1,z3も1.5人分になる。一方、トルク検出装置17によって実測される実測トルクz2はかご2内及びかご室4の天井の二人分となる。従って、トルク差演算手段によって演算される実測トルクz2と推定トルクz1,z3との差は0.5人分となる。このように、人がかご枠3上にいるときの実測トルクz2と推定トルクz1,z3との差αのほうが人がかご室4の天井にいるときの実測トルクz2と推定トルクz1,z3との差βよりも大きくなる。
【0050】
次に、本発明の第2実施形態の動作を図5のフローチャートに基づいて説明する。なお、本発明の第2実施形態の動作は、第1実施形態の動作において手順S7の後に後述の手順S21〜23を追加し、手順S10の後に後述の手順S31〜33を追加したものであり、上述した手順S1〜10における各動作の説明を省略する。
【0051】
図5は本発明の第2実施形態の動作を説明するフローチャートである。
【0052】
本発明の第2実施形態では、図5に示すように手順S7の後、判定装置21のトルク差演算手段は実測トルクz2と推定トルクz1との差を演算し(S21)、演算した実測トルクz2と推定トルクz1との差が所定の値より大きいかどうかを判断する(S22)。このとき、トルク差演算手段は、実測トルクz2と推定トルクz1との差が所定の値より大きいと判断した場合には、判定装置21はかご2上の人がかご枠3の梁上にいると判定し、かご2上の人に向けてスピーカで音声を発する(S23)。そして、本発明の第2実施形態の動作を終了する。一方、手順S22においてトルク差演算手段は、実測トルクz2と推定トルクz1との差が所定の値より大きくないと判断した場合には、判定装置21はかご2上の人がかご室4の天井にいると判定し、本発明の第2実施形態の動作を終了する。
【0053】
また、手順S10の後、判定装置21のトルク差演算手段は実測トルクz2と推定トルクz3との差を演算し(S31)、演算した実測トルクz2と推定トルクz3との差が所定の値より大きいかどうかを判断する(S32)。このとき、トルク差演算手段は、実測トルクz2と推定トルクz3との差が所定の値より大きいと判断した場合には、判定装置21はかご2上の人がかご枠3の梁上にいると判定し、かご2上の人に向けてスピーカで音声を発する(S33)。そして、本発明の第2実施形態の動作を終了する。一方、手順S32においてトルク差演算手段は、実測トルクz2と推定トルクz3との差が所定の値より大きくないと判断した場合には、判定装置21はかご2上の人がかご室4の天井にいると判定し、本発明の第2実施形態の動作を終了する。
【0054】
このように構成した本発明の第2実施形態によれば、かご2上の人がかご枠3の梁上にいるときに秤装置16にかかる荷重は、かご2上の人がかご室4の天井にいるときに秤装置16にかかる荷重に対して異なる値になるので、秤装置16によって実測された出力y、n=y/a、z1=b×n、及びz3=c×nの関係式から演算される推定トルクz1,z3もそれぞれ異なる値となる。そのため、判定装置21は、手順S22及び手順S32においてトルク差演算手段によって演算されたトルク差と所定の値とを比較することにより、かご2上にいる人がかご枠3の梁上にいるのか、あるいはかご室4の天井にいるのかを明確に区別することができる。このように、かご2上に人がいるかどうかだけでなく、かご2上の人の位置まで特定できるので、かご2上の人の位置に応じた適切な処置を行うことができる。本発明の第2実施形態では、手順S23及び手順S33において判定装置21によってかご2上の人がかご枠3の梁上にいると判定された場合に、スピーカで音声を発することにより、かご枠3の梁上にいる人に注意を喚起することができる。
【0055】
なお、上述した本発明の第1、第2実施形態は、判定装置21は、かご2が上昇する方向へ運転したとき、実測トルクz2が推定トルクz1よりも大きければかご2上に人がいると判定し、実測トルクz2が推定トルクz1よりも大きくなければかご2上に人がいないと判定し、かご2が下降する方向へ運転したとき、実測トルクz2が推定トルクz3よりも小さければかご2上に人がいると判定し、実測トルクz2が推定トルクz3よりも小さくなければかご2上に人がいないと判定した場合について説明したが、この場合に限らず、例えば判定装置21は、実測トルクz2と推定トルクz1,z3との差を演算するトルク差演算手段と、このトルク差演算手段によって演算された実測トルクz2と推定トルクz1,z3との差が予め設定された閾値よりも小さい場合に誤差とみなす誤差判定手段とを有していても良い。なお、トルク差演算手段によって演算される実測トルクz2と推定トルクz1,z3との差は絶対値をとるようにしている。
【0056】
すなわち、判定装置21は、かご2が上昇する方向へ運転したとき、実測トルクz2が推定トルクz1より大きくても、トルク差演算手段によって演算された実測トルクz2と推定トルクz1との差が閾値よりも小さければ誤差判定手段で誤差とみなされ、かご2上に人がいないと判定し、かご2が下降する方向へ運転したとき、実測トルクz2が推定トルクz3より小さくても、トルク差演算手段によって演算された実測トルクz2と推定トルクz3との差が閾値よりも小さければ誤差判定手段で誤差とみなされ、かご2上に人がいないと判定するようにしても良い。これにより、誤差判定手段によって判定装置21によるかご2上の人の検出精度をさらに向上させることができる。
【符号の説明】
【0057】
1 昇降路
2 かご
3 かご枠
4 かご室
5 巻上機
6 モータ
7 駆動シーブ
15 防振ゴム
16 秤装置(負荷計測装置)
17 トルク検出装置
18 制御装置
19 比較部
20 推定トルク演算部
21 判定装置
【特許請求の範囲】
【請求項1】
昇降路内を昇降するかごと、このかごに主ロープを介して連結された釣合い錘と、前記かご及び前記釣合い錘を昇降させる巻上機と、前記かご内の負荷を計測する負荷計測装置とを備え、前記巻上機は、前記主ロープが巻き掛けられて回転する駆動シーブを有するエレベータに適用され、前記かご上に人がいるかどうかを判定し、この判定結果に応じて前記エレベータの運転を制御する制御装置を備えたエレベータの保守運転装置において、
前記駆動シーブのトルクを実測トルクとして実測するトルク検出装置と、
前記負荷計測装置によって計測された前記かご内の負荷に基づいて、前記かごの運転方向別の前記駆動シーブのトルクを推定トルクとして演算する推定トルク演算部と、
前記トルク検出装置によって実測された前記実測トルクと前記推定トルク演算部によって演算された前記推定トルクとを比較し、前記かご上に人がいるかどうかを判定する判定装置とを備えたことを特徴とするエレベータの保守運転装置。
【請求項2】
請求項1に記載のエレベータの保守運転装置において、
前記判定装置は、
前記かごが上昇する方向へ運転したとき、前記実測トルクが前記推定トルクよりも大きければ前記かご上に人がいると判定し、前記実測トルクが前記推定トルクよりも大きくなければ前記かご上に人がいないと判定し、前記かごが下降する方向へ運転したとき、前記実測トルクが前記推定トルクよりも小さければ前記かご上に人がいると判定し、前記実測トルクが前記推定トルクよりも小さくなければ前記かご上に人がいないと判定することを特徴とするエレベータの保守運転装置。
【請求項3】
請求項2に記載のエレベータの保守運転装置において、
前記かごは、
乗車空間を形成するかご室と、
このかご室を囲み、前記かご室を支持するかご枠とから少なくとも構成され、
前記負荷計測装置は、前記かご枠のうち前記かごの下側に設けられ、前記かご室の荷重を実測する秤装置から成り、
前記判定装置は、
前記実測トルクと前記推定トルクとの差を演算するトルク差演算手段を有し、
このトルク差演算手段によって演算された前記実測トルクと前記推定トルクとの差が所定の値より大きければ前記かご上の人が前記かご枠の梁上にいると判定し、前記トルク差演算手段によって演算された前記実測トルクと前記推定トルクとの差が前記所定の値より大きくなければ、前記かご上の人が前記かご室の天井にいると判定することを特徴とするエレベータの保守運転装置。
【請求項4】
請求項1ないし3のいずれか1項に記載のエレベータの保守運転装置において、
前記制御装置は、
前記判定装置によって前記かご上に人がいると判定された場合、前記かごを通常の速度よりも低い速度で走行させる低速運転にし、前記判定装置によって前記かご上に人がいないと判定された場合、前記かごを通常の速度で走行させる通常運転にする制御を行うことを特徴とするエレベータの保守運転装置。
【請求項1】
昇降路内を昇降するかごと、このかごに主ロープを介して連結された釣合い錘と、前記かご及び前記釣合い錘を昇降させる巻上機と、前記かご内の負荷を計測する負荷計測装置とを備え、前記巻上機は、前記主ロープが巻き掛けられて回転する駆動シーブを有するエレベータに適用され、前記かご上に人がいるかどうかを判定し、この判定結果に応じて前記エレベータの運転を制御する制御装置を備えたエレベータの保守運転装置において、
前記駆動シーブのトルクを実測トルクとして実測するトルク検出装置と、
前記負荷計測装置によって計測された前記かご内の負荷に基づいて、前記かごの運転方向別の前記駆動シーブのトルクを推定トルクとして演算する推定トルク演算部と、
前記トルク検出装置によって実測された前記実測トルクと前記推定トルク演算部によって演算された前記推定トルクとを比較し、前記かご上に人がいるかどうかを判定する判定装置とを備えたことを特徴とするエレベータの保守運転装置。
【請求項2】
請求項1に記載のエレベータの保守運転装置において、
前記判定装置は、
前記かごが上昇する方向へ運転したとき、前記実測トルクが前記推定トルクよりも大きければ前記かご上に人がいると判定し、前記実測トルクが前記推定トルクよりも大きくなければ前記かご上に人がいないと判定し、前記かごが下降する方向へ運転したとき、前記実測トルクが前記推定トルクよりも小さければ前記かご上に人がいると判定し、前記実測トルクが前記推定トルクよりも小さくなければ前記かご上に人がいないと判定することを特徴とするエレベータの保守運転装置。
【請求項3】
請求項2に記載のエレベータの保守運転装置において、
前記かごは、
乗車空間を形成するかご室と、
このかご室を囲み、前記かご室を支持するかご枠とから少なくとも構成され、
前記負荷計測装置は、前記かご枠のうち前記かごの下側に設けられ、前記かご室の荷重を実測する秤装置から成り、
前記判定装置は、
前記実測トルクと前記推定トルクとの差を演算するトルク差演算手段を有し、
このトルク差演算手段によって演算された前記実測トルクと前記推定トルクとの差が所定の値より大きければ前記かご上の人が前記かご枠の梁上にいると判定し、前記トルク差演算手段によって演算された前記実測トルクと前記推定トルクとの差が前記所定の値より大きくなければ、前記かご上の人が前記かご室の天井にいると判定することを特徴とするエレベータの保守運転装置。
【請求項4】
請求項1ないし3のいずれか1項に記載のエレベータの保守運転装置において、
前記制御装置は、
前記判定装置によって前記かご上に人がいると判定された場合、前記かごを通常の速度よりも低い速度で走行させる低速運転にし、前記判定装置によって前記かご上に人がいないと判定された場合、前記かごを通常の速度で走行させる通常運転にする制御を行うことを特徴とするエレベータの保守運転装置。
【図1】


【図2】

【図3】
【図4】
【図5】

【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−100160(P2013−100160A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−244641(P2011−244641)
【出願日】平成23年11月8日(2011.11.8)
【出願人】(000232955)株式会社日立ビルシステム (895)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月8日(2011.11.8)
【出願人】(000232955)株式会社日立ビルシステム (895)
【Fターム(参考)】
[ Back to top ]