
エレベータの制御装置及び既設エレベータの改修方法
【課題】ペットやその飼主がエレベータを利用する際の種々の状況に容易に対応することができるとともに、ペットの首輪に繋がれた紐がドアに挟まれた状態でかごの走行が開始されてしまうことを確実に防止できるエレベータの制御装置を得る。
【解決手段】ペット10、その飼主11、ペット10のリード12の両端部に電波発生器6乃至9を装着し、上記電波発生器6乃至9を同一組とする組合せ情報を記憶部13に記憶する。また、電波受信機4をかご1に、電波受信機5を乗場3に設置し、電波発生器6乃至9からの電波を電波受信機4及び5によって受信する。そして、その電波状態と上記組合せ情報とに基づき、エレベータドアの開放時に、リード12がドアに挟まれ得る状態にあるか否かを判定し、リード12がドアに挟まれ得る状態にあると判定されると、ドアを開放保持する。
【解決手段】ペット10、その飼主11、ペット10のリード12の両端部に電波発生器6乃至9を装着し、上記電波発生器6乃至9を同一組とする組合せ情報を記憶部13に記憶する。また、電波受信機4をかご1に、電波受信機5を乗場3に設置し、電波発生器6乃至9からの電波を電波受信機4及び5によって受信する。そして、その電波状態と上記組合せ情報とに基づき、エレベータドアの開放時に、リード12がドアに挟まれ得る状態にあるか否かを判定し、リード12がドアに挟まれ得る状態にあると判定されると、ドアを開放保持する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、飼主がペットと共に快適に利用できるエレベータの制御装置、及び飼主がペットと共に快適に利用できるように既設エレベータを改修する改修方法に関するものである。
【背景技術】
【0002】
最近では、集合住宅や複合商業施設等、飼主がペットと共にエレベータを利用することが多くなっている。
【0003】
飼主がペットと共にエレベータを利用する場合、エレベータのドアが閉まる直前にペットのみがかごに飛び乗ったり、或いはかごから飛び降りたりしてしまうことがある。このようなペットの不意の動作によりペットとその飼主がかごと乗場に分かれ、その状態のままエレベータのドアが閉まってしまうと、ペットの首輪に繋がれた紐がドアに挟まった状態でエレベータの走行が開始されてしまう恐れがあった。
【0004】
このような問題に対し、対情報を有するICタグをペットと飼主とにそれぞれ取り付けることにより、かご内で検出したその対情報を元にエレベータの制御を行うようにしたものも提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−182556号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載のものでは、対になっていないICタグが検出されるとドアの開放が保持されるため、ペットに繋がれた紐がドアに挟まれた状態のままエレベータの走行が開始されることを確実に防止できる。しかし、ペットとその飼主とがエレベータを必ずしも同時に利用するとは限らず、特許文献1に記載のものでは、飼主等がエレベータを利用する際の種々の状況に対応できないといった問題があった。
例えば、飼主のみがエレベータを利用し、ペットが他の人に抱かれてその飼主を乗場側で見送る場合等には、ドアが開放されたままエレベータの走行が開始されないような事態が生じてしまう。
【0007】
この発明は、上述のような課題を解決するためになされたもので、その目的は、ペットやその飼主がエレベータを利用する際の種々の状況に容易に対応することができるとともに、ペットに繋がれた紐がドアに挟まれた状態でかごの走行が開始されてしまうことを確実に防止できるエレベータの制御装置を提供することである。
【課題を解決するための手段】
【0008】
この発明に係るエレベータの制御装置は、ペット、ペットの飼主、ペットに繋がれるリードの両端部にそれぞれ装着される各電波発生器を同一組とする組合せ情報が記憶された記憶部と、エレベータのかごに設けられ、各電波発生器から発せられる電波を受信する第1電波受信機と、エレベータの乗場に設けられ、各電波発生器から発せられる電波を受信する第2電波受信機と、第1電波受信機及び第2電波受信機が受信した各電波状態、並びに、記憶部に記憶された組合せ情報に基づいて、エレベータドアの開放時に、リードがドアに挟まれ得る状態にあるか否かを判定する判定部と、判定部によって、リードがドアに挟まれ得る状態にあると判定された場合に、ドアを開放保持する制御部と、を備えたものである。
【0009】
この発明に係る既設エレベータの改修方法は、ペット、ペットの飼主、ペットに繋がれるリードの両端部にそれぞれ装着される各電波発生器からの電波を受信可能な第1電波受信機を、エレベータのかごに新設するステップと、各電波発生器からの電波を受信可能な第2電波受信機を、エレベータの乗場に新設するステップと、各電波発生器を同一組とする組合せ情報が記憶された記憶部、第1電波受信機及び第2電波受信機が受信した各電波状態、並びに、記憶部に記憶された組合せ情報に基づいて、エレベータドアの開放時に、リードがドアに挟まれ得る状態にあるか否かを判定する判定部、判定部によって、リードがドアに挟まれ得る状態にあると判定された場合に、ドアを開放保持する制御部、を有する制御装置を新設するステップと、を備えたものである。
【0010】
また、この発明に係る既設エレベータの改修方法は、エレベータに関する所定の機能を有する制御装置が備えられたエレベータの改修方法であって、ペット、ペットの飼主、ペットに繋がれるリードの両端部にそれぞれ装着される各電波発生器からの電波を受信可能な第1電波受信機を、エレベータのかごに新設するステップと、各電波発生器からの電波を受信可能な第2電波受信機を、エレベータの乗場に新設するステップと、各電波発生器を同一組とする組合せ情報が記憶された記憶機能、第1電波受信機及び第2電波受信機が受信した各電波状態、並びに、記憶手段に記憶された組合せ情報に基づいて、エレベータドアの開放時に、リードがドアに挟まれ得る状態にあるか否かを判定する判定機能、判定機能によって、リードがドアに挟まれ得る状態にあると判定された場合に、ドアを開放保持する制御機能、を制御装置に新たに付加するステップと、を備えたものである。
【発明の効果】
【0011】
この発明によれば、ペットとその飼主とがエレベータを利用する際の種々の状況に容易に対応することができるとともに、ペットに繋がれた紐がドアに挟まった状態でかごの走行が開始されてしまうことを確実に防止できるようになる。
【図面の簡単な説明】
【0012】
【図1】この発明の実施の形態1におけるエレベータの制御装置を示す構成図である。
【図2】この発明の実施の形態1におけるエレベータの制御装置の動作を示すフローチャートである。
【図3】図1に示す制御装置の具体的機能を説明するための図である。
【図4】図1に示す制御装置の具体的機能を説明するための図である。
【図5】図1に示す制御装置の具体的機能を説明するための図である。
【図6】図1に示す制御装置の具体的機能を説明するための図である。
【図7】図1に示す制御装置の具体的機能を説明するための図である。
【図8】図1に示す制御装置の具体的機能を説明するための図である。
【図9】図1に示す制御装置の具体的機能を説明するための図である。
【図10】図1に示す制御装置の具体的機能を説明するための図である。
【図11】図1に示す制御装置の具体的機能を説明するための図である。
【図12】図1に示す制御装置の具体的機能を説明するための図である。
【図13】図1に示す制御装置の具体的機能を説明するための図である。
【図14】図1に示す制御装置の具体的機能を説明するための図である。
【発明を実施するための形態】
【0013】
この発明をより詳細に説明するため、添付の図面に従ってこれを説明する。なお、各図中、同一又は相当する部分には同一の符号を付しており、その重複説明は適宜に簡略化ないし省略する。
【0014】
実施の形態1.
図1はこの発明の実施の形態1におけるエレベータの制御装置を示す構成図、図2はこの発明の実施の形態1におけるエレベータの制御装置の動作を示すフローチャート、図3乃至図14は図1に示す制御装置の具体的機能を説明するための図である。
【0015】
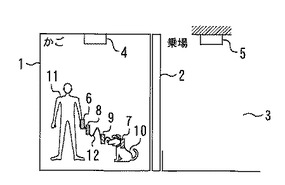
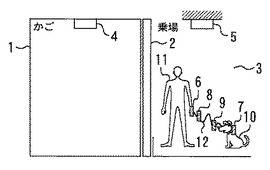
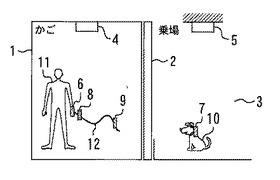
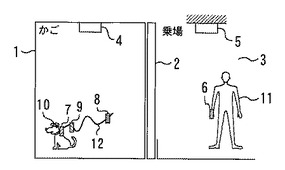
先ず、図1及び図3に基づき、エレベータの制御装置の具体的な構成について説明する。図1及び図3において、1はエレベータ昇降路内を昇降するかご、2はかご1の出入口を開閉するかごドア、3はエレベータの乗場である。なお、乗場3に設けられた乗場ドアの図示は省略している。また、以下において、かごドア2及びかご1が停止した乗場3の乗場ドアの双方を意味する場合は、単に「ドア」或いは「エレベータドア」という。
【0016】
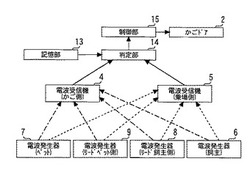
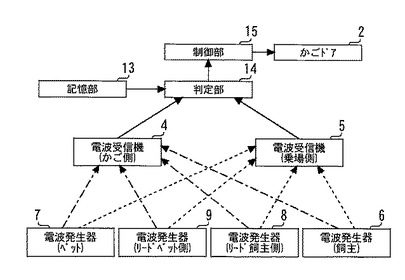
4はかご1の天井部に設けられた電波受信機、5は乗場3の天井部に設けられた電波受信機である。電波受信機4及び5は、電波発生器6乃至9から発せられた電波を受信し、その受信した電波の情報(以下、単に「電波情報」という)を出力する機能を有している。具体的に、上記電波受信機4及び5は、受信した電波がどの電波発生器から発せられたものなのかを検出する機能、並びに、受信した電波の強度を検出する機能をそれぞれ備えており、各機能による検出結果を上記電波情報として出力する。
【0017】
なお、電波発生器6乃至9は、例えば位置特定用のICタグ等からなり、それぞれが所定周波数の電波を発生するように構成される。具体的に、電波発生器6乃至9は、ペット10、ペット10の飼主11(エレベータ利用者)、ペット10の首輪に繋がれるリード(引き綱)12の各適所に取り付けられており、それぞれからほぼ同一強度の電波を発生する。
【0018】
例えば、電波発生器6は飼主11に、電波発生器7はペット10に装着される。なお、上記電波発生器6は、飼主11がリード12を離した時でも飼主11に装着されているように、また、電波発生器7は、リード12がペット10から外された時でもペット10に装着されているように、適切な位置及び方法で飼主11或いはペット10に取り付けられている。
電波発生器8は、リード12のうち飼主11が持つ側の端部に、電波発生器9は、リード12のうちペット10に繋がれる側の端部にそれぞれ装着されている。
【0019】
また、13は電波発生器の組合せ情報が記憶された記憶部、14は電波受信機4及び5からの電波情報等に基づいて、ペット10や飼主11、リード12の各位置を特定する等、所定の判定を行う判定部、15は判定部14の判定結果等に基づいてエレベータの運行を制御する制御部である。なお、上記ペット10に関連する各電波発生器6乃至9は、同一組の電波発生器として記憶部13に記憶されている。即ち、電波発生器には、関連するペット毎に異なる組合せ情報が付与され、その組合せ情報が記憶部13に記憶されている。
【0020】
次に、図2に基づき、上記構成を有するエレベータの制御装置の具体的な動作について説明する。
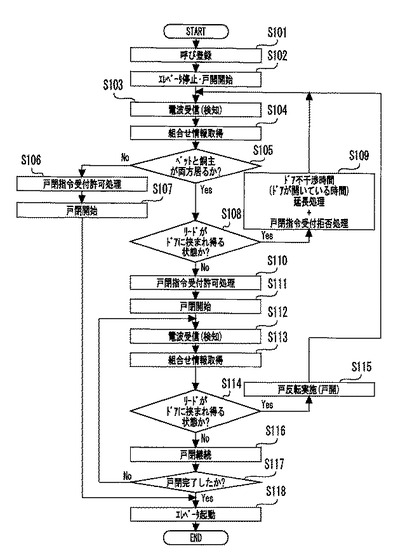
エレベータのかご1内や乗場3から呼び登録が行われると(S101)、かご1はその呼びに応じて走行し、対応の乗場3に停止した後に戸開動作を開始する(S102)。そして、乗場3においてエレベータドアが開放されると、かご1内の電波受信機4とかご1が停止した乗場3の電波受信機5とにより、かご1及び乗場3で発生している電波の受信が行われる(S103)。
【0021】
電波受信機4及び5は、かご1及び乗場3で発生している電波を受信し、その電波情報を判定部14に対して送信する。また、判定部14は、記憶部13から電波発生器の組合せ情報を取得するとともに(S104)、取得したこの組合せ情報と上記受信した電波情報とに基づき、ペット10、飼主11、リード12両端部の位置関係を把握して、以下の判定及び処理を実施する。
【0022】
先ず、判定部14は、記憶部13からの組合せ情報と電波受信機4及び5からの電波情報とに基づき、ペット10とその飼主11とがその場に両方居るか否かを判定する(S105)。ここで、飼主11のみ居る、又は、ペット10及びその飼主11の双方が居ない(即ち、電波受信機4及び5による電波検知がない)場合、判定部14は、リード12がドアに挟まれることはないと判断して、戸閉指令の受付を許可する処理を実行する(S106)。かかる場合、制御部15は、戸閉指令が入力されることにより、戸閉動作を開始する(S107)。
【0023】
一方、S105においてペット10とその飼主11との双方がその場に居ると判定されると、判定部14は、次に、特定したペット10、飼主11、リード12両端部の各位置に基づき、リード12がドアに挟まれ得る状態にあるか否かを判定する(S108)。ここで、リード12を手にした飼主11とリード12に繋がれたペット10とがかご1と乗場3とに別れている等、リード12がドアに挟まれ得る状態にあるとの判定がなされると、判定部14は、ドアの不干渉時間(ドアが開放されている時間)を延長する処理、及び、戸閉指令の受付を拒否する処理を実行する(S109)。即ち、判定部14からの指令を受けた制御部15により、エレベータドアは開放保持される。そして、S109の処理の後、S103以降の手順が再度実施される。
【0024】
一方、S108においてリード12がドアに挟まれ得る状態にないとの判定がなされると、判定部14は、戸閉指令の受付を許可する処理を実行する(S110)。かかる場合、制御部15は、戸閉指令が入力されることにより、戸閉動作を開始する(S111)。
【0025】
また、電波受信機4及び5は、S111において戸閉動作が開始された後も、戸閉が完了するまでかご1及び乗場3で発生している電波を受信し、その電波情報を判定部14に送信する(S112)。そして、判定部14では、記憶部13から取得した電波発生器の組合せ情報と戸閉動作が開始された後に電波受信機4及び5から送信されてくる電波情報とに基づき、ペット10、飼主11、リード12両端部の位置関係を逐次更新し、更新された検出結果から、リード12がドアに挟まれ得る状態にあるか否かを判定する(S113、S114)。
【0026】
ここで、リード12がドアに挟まれ得る状態にあるとの判定がなされると、判定部14は、制御部15に対して戸開指令を出力し、戸反転動作を実行させる(S115)。なお、S115において戸反転動作が行われた後は、S103以降の手順が再度実施される。
一方、S114においてリード12がドアに挟まれ得る状態にないとの判定がなされたまま戸閉が完了すると(S116、S117)、判定部14は、戸閉動作中のペット10の飛び乗り或いは飛び降り等はないと判断する。かかる場合、制御部15は、登録されている呼びに基づき、エレベータを起動させてかご1の走行を開始する(S118)。
【0027】
次に、図3乃至図14を参照し、より具体的な状況について説明する。なお、図3乃至図14は、ペット10の飼主11がエレベータを利用する際の種々の状況を示している。また、以下においては、一例として、電波受信機4及び5が、電波発生器6乃至9が発した電波の強度を3段階(強、中、弱の各レベル)で検出する場合について説明する。
【0028】
図3はペット10がリード12に繋がれ、飼主11とともにかご1に乗車した様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表1に示すようになる。
【0029】
【表1】

【0030】
なお、表1及び以下の表においては、電波受信機4及び5が検出した電波強度を「○」で表している。即ち、図3に示す状態では、電波受信機4は電波発生器6乃至9からの各電波を強レベルで検出し、電波受信機5は電波発生器6乃至9からの各電波を弱レベルで検出する。そして、判定部14は、電波受信機4及び5による電波の受信状態(電波受信の有無及び電波受信レベル)から、ペット10とその飼主11とがかご1に乗車し、リード12がかご1内に配置されている旨を検出する。なお、上記判定を行った判定部14は、制御部15に対して戸閉指令受付許可の処理を実施する。
【0031】
また、図4はペット10がリード12に繋がれ、飼主11とともに乗場3にいる様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表2に示すようになる。
【0032】
【表2】
【0033】
図4に示す状態では、電波受信機4は電波発生器6乃至9からの各電波を弱レベルで検出し、電波受信機5は電波発生器6乃至9からの各電波を強レベルで検出する。そして、判定部14は、かかる受信状態から、ペット10とその飼主11とが乗場3に居て、リード12が乗場3に配置されている旨を検出する。なお、上記判定を行った判定部14は、制御部15に対して戸閉指令受付許可の処理を実施する。
【0034】
図5はペット10がリード12に繋がれた状態で、飼主11のみがかご1に乗車し、ペット10が乗場3に居る様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表3に示すようになる。
【0035】
【表3】
【0036】
図5に示す状態では、電波受信機4は、飼主11側の電波発生器6及び8からの電波を同じ強レベルで、ペット10側の電波発生器7及び9からの電波を同じ弱レベルで検出する。また、電波受信機5は、電波発生器6及び8からの電波を弱レベルで、電波発生器7及び9からの電波を強レベルで検出する。そして、判定部14は、かかる受信状態に基づき、リード12を持った飼主11がかご1に、リード12に繋がれたペット10が乗場3に居るため、このままの状態ではリード12がドアに挟まれ得ることを検出する。なお、上記判定を行った判定部14は、制御部15に対し、戸閉指令受付拒否及びドア不干渉時間延長の各処理を実施する。
【0037】
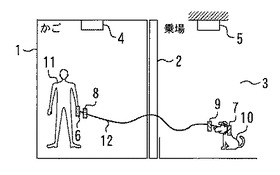
図6はペット10がリード12に繋がれた状態で、飼主11のみがかご1から乗場3に降り、ペット10がまだかご1内に居る様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表4に示すようになる。
【0038】
【表4】
【0039】
図6に示す状態では、電波受信機4は、飼主11側の電波発生器6及び8からの電波を同じ弱レベルで、ペット10側の電波発生器7及び9からの電波を同じ強レベルで検出する。また、電波受信機5は、電波発生器6及び8からの電波を強レベルで、電波発生器7及び9からの電波を弱レベルで検出する。そして、判定部14は、かかる受信状態に基づき、リード12を持った飼主11が乗場3に、リード12に繋がれたペット10がかご1内に居るため、このままの状態ではリード12がドアに挟まれ得ることを検出する。なお、上記判定を行った判定部14は、制御部15に対し、戸閉指令受付拒否及びドア不干渉時間延長の各処理を実施する。
【0040】
図7はリード12を持った飼主11がかご1内に、ペット10が乗場3に居るが、リード12がペット10の首輪から外れて、そのペット10側端部が乗場3のドア付近にある様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表5に示すようになる。
【0041】
【表5】
【0042】
図7に示す状態では、飼主11側の電波発生器6及び8からの電波は、電波受信機4により強レベルで、電波受信機5により弱レベルで検出される。また、ペット10側の電波発生器7及び9からの電波は、電波受信機4及び5によって異なるレベルで検出される。具体的に、電波発生器7からの電波は、電波受信機4により弱レベルで、電波受信機5により強レベルで検出され、電波発生器9からの電波は、電波受信機4及び5ともに中レベルで検出される。
【0043】
そして、判定部14は、かかる受信状態に基づき、リード12を持った飼主11がかご1内に、ペット10が乗場3に居ることを検出する。また、判定部14は、電波発生器7及び9の電波強度の違いからリード12がペット10から外れたことを、電波受信機4及び5が受信した電波発生器9の電波レベル(中レベル)から、リード12のペット10側がドアに挟まれ得る状態であることを検出する。なお、上記判定を行った判定部14は、制御部15に対し、戸閉指令受付拒否及びドア不干渉時間延長の各処理を実施する。
【0044】
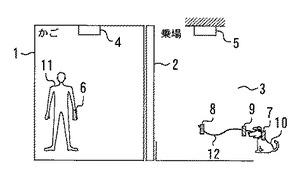
図8は図7が示す状態から、飼主11がリード12を引っ張り、リード12のペット10側端部がかご1内に配置された様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表6に示すようになる。
【0045】
【表6】
【0046】
図8に示す状態では、飼主11側の電波発生器6及び8からの電波は、電波受信機4により強レベルで、電波受信機5により弱レベルで検出される。また、ペット10側の電波発生器7及び9からの電波は、電波受信機4及び5によって異なるレベルで検出される。具体的に、電波発生器7からの電波は、電波受信機4により弱レベルで、電波受信機5により強レベルで検出され、電波発生器9からの電波は、電波受信機4により強レベルで、電波受信機5により弱レベルで検出される。
【0047】
そして、判定部14は、かかる受信状態に基づき、リード12を持った飼主11がかご1内に、ペット10が乗場3に居ることを検出する。また、判定部14は、電波発生器7及び9の電波強度の違いからリード12がペット10から外れたことを、電波受信機4及び5が受信した電波発生器8及び9の電波レベルから、リード12全体がかご1内に配置されていることを検出する。なお、上記判定を行った判定部14は、制御部15に対して戸閉指令受付許可の処理を実施する。
【0048】
図9はリード12に繋がれたペット10のみが乗場3に降りてしまい、この時、かご1内の飼主11がリード12を離して、その飼主11側端部が乗場3まで移動した様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表7に示すようになる。
【0049】
【表7】
【0050】
図9に示す状態では、ペット10側の電波発生器7及び9からの電波は、電波受信機5により強レベルで、電波受信機4により弱レベルで検出される。また、飼主11側の電波発生器6及び8からの電波は、電波受信機4及び5によって異なるレベルで検出される。具体的に、電波発生器6からの電波は、電波受信機4により強レベルで、電波受信機5により弱レベルで検出され、電波発生器8からの電波は、電波受信機4により弱レベルで、電波受信機5により強レベルで検出される。
【0051】
そして、判定部14は、かかる受信状態に基づき、飼主11がかご1内に、ペット10が乗場3に居ることを検出する。また、判定部14は、電波発生器6及び8の電波強度の違いから飼主11がリード12を離したことを、電波受信機4及び5が受信した電波発生器8及び9の電波レベルから、リード12全体が乗場3に配置されていることを検出する。なお、上記判定を行った判定部14は、制御部15に対して戸閉指令受付許可の処理を実施する。
【0052】
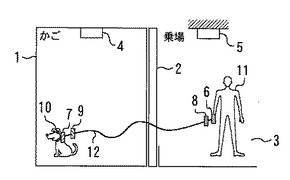
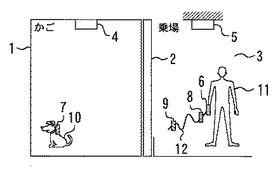
図10はリード12を持った飼主11が乗場3に、ペット10がかご1内に居るが、リード12がペット10の首輪から外れて、そのペット10側端部がかごドア2付近にある様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表8に示すようになる。
【0053】
【表8】
【0054】
図10に示す状態では、飼主11側の電波発生器6及び8からの電波は、電波受信機5により強レベルで、電波受信機4により弱レベルで検出される。また、ペット10側の電波発生器7及び9からの電波は、電波受信機4及び5によって異なるレベルで検出される。具体的に、電波発生器7からの電波は、電波受信機4により強レベルで、電波受信機5により弱レベルで検出され、電波発生器9からの電波は、電波受信機4及び5ともに中レベルで検出される。
【0055】
そして、判定部14は、かかる受信状態に基づき、リード12を持った飼主11が乗場3に、ペット10がかご1内に居ることを検出する。また、判定部14は、電波発生器7及び9の電波強度の違いからリード12がペット10から外れたことを、電波受信機4及び5が受信した電波発生器9の電波レベル(中レベル)から、リード12のペット10側がドアに挟まれ得る状態であることを検出する。なお、上記判定を行った判定部14は、制御部15に対し、戸閉指令受付拒否及びドア不干渉時間延長の各処理を実施する。
【0056】
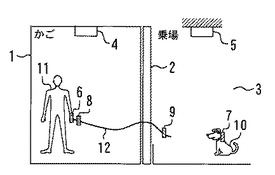
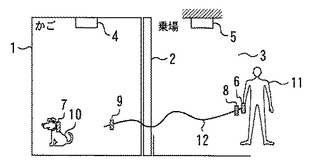
図11は図10に示す状態から、飼主11がリード12を引っ張り、リード12のペット10側端部が乗場3に配置された様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表9に示すようになる。
【0057】
【表9】
【0058】
図11に示す状態では、飼主11側の電波発生器6及び8からの電波は、電波受信機5により強レベルで、電波受信機4により弱レベルで検出される。また、ペット10側の電波発生器7及び9からの電波は、電波受信機4及び5によって異なるレベルで検出される。具体的に、電波発生器7からの電波は、電波受信機4により強レベルで、電波受信機5により弱レベルで検出され、電波発生器9からの電波は、電波受信機4により弱レベルで、電波受信機5により強レベルで検出される。
【0059】
そして、判定部14は、かかる受信状態に基づき、飼主11が乗場3に、ペット10がかご1内に居ることを検出する。また、判定部14は、電波発生器7及び9の電波強度の違いからリード12がペット10から外れたことを、電波受信機4及び5が受信した電波発生器8及び9の電波レベルから、リード12全体が乗場3に配置されていることを検出する。なお、上記判定を行った判定部14は、制御部15に対して戸閉指令受付許可の処理を実施する。
【0060】
図12は、リード12に繋がれたペット10のみがかご1に乗車してしまい、この時、乗場3に居る飼主11がリード12を離して、その飼主11側端部がかご1内まで移動した様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表10に示すようになる。
【0061】
【表10】
【0062】
図12に示す状態では、ペット10側の電波発生器7及び9からの電波は、電波受信機4により強レベルで、電波受信機5により弱レベルで検出される。また、飼主11側の電波発生器6及び8からの電波は、電波受信機4及び5によって異なるレベルで検出される。具体的に、電波発生器6からの電波は、電波受信機4により弱レベルで、電波受信機5により強レベルで検出され、電波発生器8からの電波は、電波受信機4により強レベルで、電波受信機5により弱レベルで検出される。
【0063】
そして、判定部14は、かかる受信状態に基づき、飼主11が乗場3に、ペット10がかご1内に居ることを検出する。また、判定部14は、電波発生器6及び8の電波強度の違いから飼主11がリード12を離したことを、電波受信機4及び5が受信した電波発生器8及び9の電波レベルから、リード12全体がかご1内に配置されていることを検出する。なお、上記判定を行った判定部14は、制御部15に対して戸閉指令受付許可の処理を実施する。
【0064】
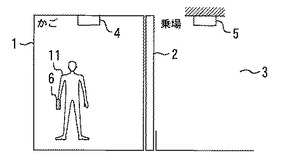
図13は飼主11がペット10を連れずに一人でエレベータを利用する様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表11に示すようになる。
【0065】
【表11】
【0066】
図13に示す状態では、飼主11が携帯する電波発生器6のみが電波受信機4及び5により検出される。かかる場合、判定部14は、リード12がドアに挟まれる可能性がないため、制御部15に対し、戸閉指令受付許可の処理を実施する。なお、電波発生器6から発せられた電波のみが検出される場合は、必ずしも電波の受信強度を検出する必要はない。
【0067】
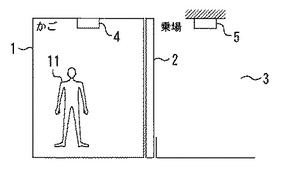
図14は飼主11が電波発生器6を携帯せずに一人でエレベータを利用する様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表12に示すようになる。
【0068】
【表12】
【0069】
図14に示す状態では、電波受信機4及び5による電波検知が行われない。このため、判定部14は、リード12がドアに挟まれる可能性がないため、制御部15に対し、戸閉指令受付許可の処理を実施する。
【0070】
この発明の実施の形態1によれば、ペット10、その飼主11、リード12の両端部に装着された電波発生器6乃至9からの電波を受信し、その受信した電波状態から、ペット10、飼主11、リード12両端部の各位置関係を把握するため、飼主11等がエレベータを利用する際の種々の状況に容易に対応することができる。
また、電波受信機4及び5が受信した上記各電波発生器6乃至9からの電波状態と、記憶部13に記憶された組合せ情報とに基づく判定により、リード12がドアに挟まれ得る状態にあるか否かを正確に判断できるため、リード12がドアに挟まれた状態での走行を確実に防止することが可能となる。
【0071】
なお、上記構成及び機能を有するエレベータの制御装置は、新規エレベータへの適用は当然のこと、既設エレベータに対しても適用することが可能である。
【0072】
具体的には、既設エレベータに対して、先ず、エレベータのかご1に電波受信機4を、各乗場3に電波受信機5を新設する。次に、記憶部13、判定部14、制御部15(或いは、制御部15のうち、判定部14に関連する機能)を備えた制御装置を新設し、この新設した制御装置に対して、かごドア2の駆動装置や電波受信機4及び5等を適切に接続する。
このような簡単な改修によって、既設エレベータに上記各効果を付与することができる。
【0073】
なお、上記方法は、既設エレベータに対して新規の制御装置を設置する場合の手順であるが、既設エレベータの改修は、エレベータに関する所定の機能を有する既設の制御装置に、上記記憶部13、判定部14、制御部15の各機能を付加することによって実現しても良い。このような方法によっても、上記効果を奏することができる。
【符号の説明】
【0074】
1 かご
2 かごドア
3 乗場
4、5 電波受信機
6、7、8、9 電波発生器
10 ペット
11 飼主
12 リード(引き綱)
13 記憶部
14 判定部
15 制御部
【技術分野】
【0001】
この発明は、飼主がペットと共に快適に利用できるエレベータの制御装置、及び飼主がペットと共に快適に利用できるように既設エレベータを改修する改修方法に関するものである。
【背景技術】
【0002】
最近では、集合住宅や複合商業施設等、飼主がペットと共にエレベータを利用することが多くなっている。
【0003】
飼主がペットと共にエレベータを利用する場合、エレベータのドアが閉まる直前にペットのみがかごに飛び乗ったり、或いはかごから飛び降りたりしてしまうことがある。このようなペットの不意の動作によりペットとその飼主がかごと乗場に分かれ、その状態のままエレベータのドアが閉まってしまうと、ペットの首輪に繋がれた紐がドアに挟まった状態でエレベータの走行が開始されてしまう恐れがあった。
【0004】
このような問題に対し、対情報を有するICタグをペットと飼主とにそれぞれ取り付けることにより、かご内で検出したその対情報を元にエレベータの制御を行うようにしたものも提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−182556号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載のものでは、対になっていないICタグが検出されるとドアの開放が保持されるため、ペットに繋がれた紐がドアに挟まれた状態のままエレベータの走行が開始されることを確実に防止できる。しかし、ペットとその飼主とがエレベータを必ずしも同時に利用するとは限らず、特許文献1に記載のものでは、飼主等がエレベータを利用する際の種々の状況に対応できないといった問題があった。
例えば、飼主のみがエレベータを利用し、ペットが他の人に抱かれてその飼主を乗場側で見送る場合等には、ドアが開放されたままエレベータの走行が開始されないような事態が生じてしまう。
【0007】
この発明は、上述のような課題を解決するためになされたもので、その目的は、ペットやその飼主がエレベータを利用する際の種々の状況に容易に対応することができるとともに、ペットに繋がれた紐がドアに挟まれた状態でかごの走行が開始されてしまうことを確実に防止できるエレベータの制御装置を提供することである。
【課題を解決するための手段】
【0008】
この発明に係るエレベータの制御装置は、ペット、ペットの飼主、ペットに繋がれるリードの両端部にそれぞれ装着される各電波発生器を同一組とする組合せ情報が記憶された記憶部と、エレベータのかごに設けられ、各電波発生器から発せられる電波を受信する第1電波受信機と、エレベータの乗場に設けられ、各電波発生器から発せられる電波を受信する第2電波受信機と、第1電波受信機及び第2電波受信機が受信した各電波状態、並びに、記憶部に記憶された組合せ情報に基づいて、エレベータドアの開放時に、リードがドアに挟まれ得る状態にあるか否かを判定する判定部と、判定部によって、リードがドアに挟まれ得る状態にあると判定された場合に、ドアを開放保持する制御部と、を備えたものである。
【0009】
この発明に係る既設エレベータの改修方法は、ペット、ペットの飼主、ペットに繋がれるリードの両端部にそれぞれ装着される各電波発生器からの電波を受信可能な第1電波受信機を、エレベータのかごに新設するステップと、各電波発生器からの電波を受信可能な第2電波受信機を、エレベータの乗場に新設するステップと、各電波発生器を同一組とする組合せ情報が記憶された記憶部、第1電波受信機及び第2電波受信機が受信した各電波状態、並びに、記憶部に記憶された組合せ情報に基づいて、エレベータドアの開放時に、リードがドアに挟まれ得る状態にあるか否かを判定する判定部、判定部によって、リードがドアに挟まれ得る状態にあると判定された場合に、ドアを開放保持する制御部、を有する制御装置を新設するステップと、を備えたものである。
【0010】
また、この発明に係る既設エレベータの改修方法は、エレベータに関する所定の機能を有する制御装置が備えられたエレベータの改修方法であって、ペット、ペットの飼主、ペットに繋がれるリードの両端部にそれぞれ装着される各電波発生器からの電波を受信可能な第1電波受信機を、エレベータのかごに新設するステップと、各電波発生器からの電波を受信可能な第2電波受信機を、エレベータの乗場に新設するステップと、各電波発生器を同一組とする組合せ情報が記憶された記憶機能、第1電波受信機及び第2電波受信機が受信した各電波状態、並びに、記憶手段に記憶された組合せ情報に基づいて、エレベータドアの開放時に、リードがドアに挟まれ得る状態にあるか否かを判定する判定機能、判定機能によって、リードがドアに挟まれ得る状態にあると判定された場合に、ドアを開放保持する制御機能、を制御装置に新たに付加するステップと、を備えたものである。
【発明の効果】
【0011】
この発明によれば、ペットとその飼主とがエレベータを利用する際の種々の状況に容易に対応することができるとともに、ペットに繋がれた紐がドアに挟まった状態でかごの走行が開始されてしまうことを確実に防止できるようになる。
【図面の簡単な説明】
【0012】
【図1】この発明の実施の形態1におけるエレベータの制御装置を示す構成図である。
【図2】この発明の実施の形態1におけるエレベータの制御装置の動作を示すフローチャートである。
【図3】図1に示す制御装置の具体的機能を説明するための図である。
【図4】図1に示す制御装置の具体的機能を説明するための図である。
【図5】図1に示す制御装置の具体的機能を説明するための図である。
【図6】図1に示す制御装置の具体的機能を説明するための図である。
【図7】図1に示す制御装置の具体的機能を説明するための図である。
【図8】図1に示す制御装置の具体的機能を説明するための図である。
【図9】図1に示す制御装置の具体的機能を説明するための図である。
【図10】図1に示す制御装置の具体的機能を説明するための図である。
【図11】図1に示す制御装置の具体的機能を説明するための図である。
【図12】図1に示す制御装置の具体的機能を説明するための図である。
【図13】図1に示す制御装置の具体的機能を説明するための図である。
【図14】図1に示す制御装置の具体的機能を説明するための図である。
【発明を実施するための形態】
【0013】
この発明をより詳細に説明するため、添付の図面に従ってこれを説明する。なお、各図中、同一又は相当する部分には同一の符号を付しており、その重複説明は適宜に簡略化ないし省略する。
【0014】
実施の形態1.
図1はこの発明の実施の形態1におけるエレベータの制御装置を示す構成図、図2はこの発明の実施の形態1におけるエレベータの制御装置の動作を示すフローチャート、図3乃至図14は図1に示す制御装置の具体的機能を説明するための図である。
【0015】
先ず、図1及び図3に基づき、エレベータの制御装置の具体的な構成について説明する。図1及び図3において、1はエレベータ昇降路内を昇降するかご、2はかご1の出入口を開閉するかごドア、3はエレベータの乗場である。なお、乗場3に設けられた乗場ドアの図示は省略している。また、以下において、かごドア2及びかご1が停止した乗場3の乗場ドアの双方を意味する場合は、単に「ドア」或いは「エレベータドア」という。
【0016】
4はかご1の天井部に設けられた電波受信機、5は乗場3の天井部に設けられた電波受信機である。電波受信機4及び5は、電波発生器6乃至9から発せられた電波を受信し、その受信した電波の情報(以下、単に「電波情報」という)を出力する機能を有している。具体的に、上記電波受信機4及び5は、受信した電波がどの電波発生器から発せられたものなのかを検出する機能、並びに、受信した電波の強度を検出する機能をそれぞれ備えており、各機能による検出結果を上記電波情報として出力する。
【0017】
なお、電波発生器6乃至9は、例えば位置特定用のICタグ等からなり、それぞれが所定周波数の電波を発生するように構成される。具体的に、電波発生器6乃至9は、ペット10、ペット10の飼主11(エレベータ利用者)、ペット10の首輪に繋がれるリード(引き綱)12の各適所に取り付けられており、それぞれからほぼ同一強度の電波を発生する。
【0018】
例えば、電波発生器6は飼主11に、電波発生器7はペット10に装着される。なお、上記電波発生器6は、飼主11がリード12を離した時でも飼主11に装着されているように、また、電波発生器7は、リード12がペット10から外された時でもペット10に装着されているように、適切な位置及び方法で飼主11或いはペット10に取り付けられている。
電波発生器8は、リード12のうち飼主11が持つ側の端部に、電波発生器9は、リード12のうちペット10に繋がれる側の端部にそれぞれ装着されている。
【0019】
また、13は電波発生器の組合せ情報が記憶された記憶部、14は電波受信機4及び5からの電波情報等に基づいて、ペット10や飼主11、リード12の各位置を特定する等、所定の判定を行う判定部、15は判定部14の判定結果等に基づいてエレベータの運行を制御する制御部である。なお、上記ペット10に関連する各電波発生器6乃至9は、同一組の電波発生器として記憶部13に記憶されている。即ち、電波発生器には、関連するペット毎に異なる組合せ情報が付与され、その組合せ情報が記憶部13に記憶されている。
【0020】
次に、図2に基づき、上記構成を有するエレベータの制御装置の具体的な動作について説明する。
エレベータのかご1内や乗場3から呼び登録が行われると(S101)、かご1はその呼びに応じて走行し、対応の乗場3に停止した後に戸開動作を開始する(S102)。そして、乗場3においてエレベータドアが開放されると、かご1内の電波受信機4とかご1が停止した乗場3の電波受信機5とにより、かご1及び乗場3で発生している電波の受信が行われる(S103)。
【0021】
電波受信機4及び5は、かご1及び乗場3で発生している電波を受信し、その電波情報を判定部14に対して送信する。また、判定部14は、記憶部13から電波発生器の組合せ情報を取得するとともに(S104)、取得したこの組合せ情報と上記受信した電波情報とに基づき、ペット10、飼主11、リード12両端部の位置関係を把握して、以下の判定及び処理を実施する。
【0022】
先ず、判定部14は、記憶部13からの組合せ情報と電波受信機4及び5からの電波情報とに基づき、ペット10とその飼主11とがその場に両方居るか否かを判定する(S105)。ここで、飼主11のみ居る、又は、ペット10及びその飼主11の双方が居ない(即ち、電波受信機4及び5による電波検知がない)場合、判定部14は、リード12がドアに挟まれることはないと判断して、戸閉指令の受付を許可する処理を実行する(S106)。かかる場合、制御部15は、戸閉指令が入力されることにより、戸閉動作を開始する(S107)。
【0023】
一方、S105においてペット10とその飼主11との双方がその場に居ると判定されると、判定部14は、次に、特定したペット10、飼主11、リード12両端部の各位置に基づき、リード12がドアに挟まれ得る状態にあるか否かを判定する(S108)。ここで、リード12を手にした飼主11とリード12に繋がれたペット10とがかご1と乗場3とに別れている等、リード12がドアに挟まれ得る状態にあるとの判定がなされると、判定部14は、ドアの不干渉時間(ドアが開放されている時間)を延長する処理、及び、戸閉指令の受付を拒否する処理を実行する(S109)。即ち、判定部14からの指令を受けた制御部15により、エレベータドアは開放保持される。そして、S109の処理の後、S103以降の手順が再度実施される。
【0024】
一方、S108においてリード12がドアに挟まれ得る状態にないとの判定がなされると、判定部14は、戸閉指令の受付を許可する処理を実行する(S110)。かかる場合、制御部15は、戸閉指令が入力されることにより、戸閉動作を開始する(S111)。
【0025】
また、電波受信機4及び5は、S111において戸閉動作が開始された後も、戸閉が完了するまでかご1及び乗場3で発生している電波を受信し、その電波情報を判定部14に送信する(S112)。そして、判定部14では、記憶部13から取得した電波発生器の組合せ情報と戸閉動作が開始された後に電波受信機4及び5から送信されてくる電波情報とに基づき、ペット10、飼主11、リード12両端部の位置関係を逐次更新し、更新された検出結果から、リード12がドアに挟まれ得る状態にあるか否かを判定する(S113、S114)。
【0026】
ここで、リード12がドアに挟まれ得る状態にあるとの判定がなされると、判定部14は、制御部15に対して戸開指令を出力し、戸反転動作を実行させる(S115)。なお、S115において戸反転動作が行われた後は、S103以降の手順が再度実施される。
一方、S114においてリード12がドアに挟まれ得る状態にないとの判定がなされたまま戸閉が完了すると(S116、S117)、判定部14は、戸閉動作中のペット10の飛び乗り或いは飛び降り等はないと判断する。かかる場合、制御部15は、登録されている呼びに基づき、エレベータを起動させてかご1の走行を開始する(S118)。
【0027】
次に、図3乃至図14を参照し、より具体的な状況について説明する。なお、図3乃至図14は、ペット10の飼主11がエレベータを利用する際の種々の状況を示している。また、以下においては、一例として、電波受信機4及び5が、電波発生器6乃至9が発した電波の強度を3段階(強、中、弱の各レベル)で検出する場合について説明する。
【0028】
図3はペット10がリード12に繋がれ、飼主11とともにかご1に乗車した様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表1に示すようになる。
【0029】
【表1】
【0030】
なお、表1及び以下の表においては、電波受信機4及び5が検出した電波強度を「○」で表している。即ち、図3に示す状態では、電波受信機4は電波発生器6乃至9からの各電波を強レベルで検出し、電波受信機5は電波発生器6乃至9からの各電波を弱レベルで検出する。そして、判定部14は、電波受信機4及び5による電波の受信状態(電波受信の有無及び電波受信レベル)から、ペット10とその飼主11とがかご1に乗車し、リード12がかご1内に配置されている旨を検出する。なお、上記判定を行った判定部14は、制御部15に対して戸閉指令受付許可の処理を実施する。
【0031】
また、図4はペット10がリード12に繋がれ、飼主11とともに乗場3にいる様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表2に示すようになる。
【0032】
【表2】
【0033】
図4に示す状態では、電波受信機4は電波発生器6乃至9からの各電波を弱レベルで検出し、電波受信機5は電波発生器6乃至9からの各電波を強レベルで検出する。そして、判定部14は、かかる受信状態から、ペット10とその飼主11とが乗場3に居て、リード12が乗場3に配置されている旨を検出する。なお、上記判定を行った判定部14は、制御部15に対して戸閉指令受付許可の処理を実施する。
【0034】
図5はペット10がリード12に繋がれた状態で、飼主11のみがかご1に乗車し、ペット10が乗場3に居る様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表3に示すようになる。
【0035】
【表3】
【0036】
図5に示す状態では、電波受信機4は、飼主11側の電波発生器6及び8からの電波を同じ強レベルで、ペット10側の電波発生器7及び9からの電波を同じ弱レベルで検出する。また、電波受信機5は、電波発生器6及び8からの電波を弱レベルで、電波発生器7及び9からの電波を強レベルで検出する。そして、判定部14は、かかる受信状態に基づき、リード12を持った飼主11がかご1に、リード12に繋がれたペット10が乗場3に居るため、このままの状態ではリード12がドアに挟まれ得ることを検出する。なお、上記判定を行った判定部14は、制御部15に対し、戸閉指令受付拒否及びドア不干渉時間延長の各処理を実施する。
【0037】
図6はペット10がリード12に繋がれた状態で、飼主11のみがかご1から乗場3に降り、ペット10がまだかご1内に居る様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表4に示すようになる。
【0038】
【表4】
【0039】
図6に示す状態では、電波受信機4は、飼主11側の電波発生器6及び8からの電波を同じ弱レベルで、ペット10側の電波発生器7及び9からの電波を同じ強レベルで検出する。また、電波受信機5は、電波発生器6及び8からの電波を強レベルで、電波発生器7及び9からの電波を弱レベルで検出する。そして、判定部14は、かかる受信状態に基づき、リード12を持った飼主11が乗場3に、リード12に繋がれたペット10がかご1内に居るため、このままの状態ではリード12がドアに挟まれ得ることを検出する。なお、上記判定を行った判定部14は、制御部15に対し、戸閉指令受付拒否及びドア不干渉時間延長の各処理を実施する。
【0040】
図7はリード12を持った飼主11がかご1内に、ペット10が乗場3に居るが、リード12がペット10の首輪から外れて、そのペット10側端部が乗場3のドア付近にある様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表5に示すようになる。
【0041】
【表5】
【0042】
図7に示す状態では、飼主11側の電波発生器6及び8からの電波は、電波受信機4により強レベルで、電波受信機5により弱レベルで検出される。また、ペット10側の電波発生器7及び9からの電波は、電波受信機4及び5によって異なるレベルで検出される。具体的に、電波発生器7からの電波は、電波受信機4により弱レベルで、電波受信機5により強レベルで検出され、電波発生器9からの電波は、電波受信機4及び5ともに中レベルで検出される。
【0043】
そして、判定部14は、かかる受信状態に基づき、リード12を持った飼主11がかご1内に、ペット10が乗場3に居ることを検出する。また、判定部14は、電波発生器7及び9の電波強度の違いからリード12がペット10から外れたことを、電波受信機4及び5が受信した電波発生器9の電波レベル(中レベル)から、リード12のペット10側がドアに挟まれ得る状態であることを検出する。なお、上記判定を行った判定部14は、制御部15に対し、戸閉指令受付拒否及びドア不干渉時間延長の各処理を実施する。
【0044】
図8は図7が示す状態から、飼主11がリード12を引っ張り、リード12のペット10側端部がかご1内に配置された様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表6に示すようになる。
【0045】
【表6】
【0046】
図8に示す状態では、飼主11側の電波発生器6及び8からの電波は、電波受信機4により強レベルで、電波受信機5により弱レベルで検出される。また、ペット10側の電波発生器7及び9からの電波は、電波受信機4及び5によって異なるレベルで検出される。具体的に、電波発生器7からの電波は、電波受信機4により弱レベルで、電波受信機5により強レベルで検出され、電波発生器9からの電波は、電波受信機4により強レベルで、電波受信機5により弱レベルで検出される。
【0047】
そして、判定部14は、かかる受信状態に基づき、リード12を持った飼主11がかご1内に、ペット10が乗場3に居ることを検出する。また、判定部14は、電波発生器7及び9の電波強度の違いからリード12がペット10から外れたことを、電波受信機4及び5が受信した電波発生器8及び9の電波レベルから、リード12全体がかご1内に配置されていることを検出する。なお、上記判定を行った判定部14は、制御部15に対して戸閉指令受付許可の処理を実施する。
【0048】
図9はリード12に繋がれたペット10のみが乗場3に降りてしまい、この時、かご1内の飼主11がリード12を離して、その飼主11側端部が乗場3まで移動した様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表7に示すようになる。
【0049】
【表7】
【0050】
図9に示す状態では、ペット10側の電波発生器7及び9からの電波は、電波受信機5により強レベルで、電波受信機4により弱レベルで検出される。また、飼主11側の電波発生器6及び8からの電波は、電波受信機4及び5によって異なるレベルで検出される。具体的に、電波発生器6からの電波は、電波受信機4により強レベルで、電波受信機5により弱レベルで検出され、電波発生器8からの電波は、電波受信機4により弱レベルで、電波受信機5により強レベルで検出される。
【0051】
そして、判定部14は、かかる受信状態に基づき、飼主11がかご1内に、ペット10が乗場3に居ることを検出する。また、判定部14は、電波発生器6及び8の電波強度の違いから飼主11がリード12を離したことを、電波受信機4及び5が受信した電波発生器8及び9の電波レベルから、リード12全体が乗場3に配置されていることを検出する。なお、上記判定を行った判定部14は、制御部15に対して戸閉指令受付許可の処理を実施する。
【0052】
図10はリード12を持った飼主11が乗場3に、ペット10がかご1内に居るが、リード12がペット10の首輪から外れて、そのペット10側端部がかごドア2付近にある様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表8に示すようになる。
【0053】
【表8】
【0054】
図10に示す状態では、飼主11側の電波発生器6及び8からの電波は、電波受信機5により強レベルで、電波受信機4により弱レベルで検出される。また、ペット10側の電波発生器7及び9からの電波は、電波受信機4及び5によって異なるレベルで検出される。具体的に、電波発生器7からの電波は、電波受信機4により強レベルで、電波受信機5により弱レベルで検出され、電波発生器9からの電波は、電波受信機4及び5ともに中レベルで検出される。
【0055】
そして、判定部14は、かかる受信状態に基づき、リード12を持った飼主11が乗場3に、ペット10がかご1内に居ることを検出する。また、判定部14は、電波発生器7及び9の電波強度の違いからリード12がペット10から外れたことを、電波受信機4及び5が受信した電波発生器9の電波レベル(中レベル)から、リード12のペット10側がドアに挟まれ得る状態であることを検出する。なお、上記判定を行った判定部14は、制御部15に対し、戸閉指令受付拒否及びドア不干渉時間延長の各処理を実施する。
【0056】
図11は図10に示す状態から、飼主11がリード12を引っ張り、リード12のペット10側端部が乗場3に配置された様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表9に示すようになる。
【0057】
【表9】
【0058】
図11に示す状態では、飼主11側の電波発生器6及び8からの電波は、電波受信機5により強レベルで、電波受信機4により弱レベルで検出される。また、ペット10側の電波発生器7及び9からの電波は、電波受信機4及び5によって異なるレベルで検出される。具体的に、電波発生器7からの電波は、電波受信機4により強レベルで、電波受信機5により弱レベルで検出され、電波発生器9からの電波は、電波受信機4により弱レベルで、電波受信機5により強レベルで検出される。
【0059】
そして、判定部14は、かかる受信状態に基づき、飼主11が乗場3に、ペット10がかご1内に居ることを検出する。また、判定部14は、電波発生器7及び9の電波強度の違いからリード12がペット10から外れたことを、電波受信機4及び5が受信した電波発生器8及び9の電波レベルから、リード12全体が乗場3に配置されていることを検出する。なお、上記判定を行った判定部14は、制御部15に対して戸閉指令受付許可の処理を実施する。
【0060】
図12は、リード12に繋がれたペット10のみがかご1に乗車してしまい、この時、乗場3に居る飼主11がリード12を離して、その飼主11側端部がかご1内まで移動した様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表10に示すようになる。
【0061】
【表10】
【0062】
図12に示す状態では、ペット10側の電波発生器7及び9からの電波は、電波受信機4により強レベルで、電波受信機5により弱レベルで検出される。また、飼主11側の電波発生器6及び8からの電波は、電波受信機4及び5によって異なるレベルで検出される。具体的に、電波発生器6からの電波は、電波受信機4により弱レベルで、電波受信機5により強レベルで検出され、電波発生器8からの電波は、電波受信機4により強レベルで、電波受信機5により弱レベルで検出される。
【0063】
そして、判定部14は、かかる受信状態に基づき、飼主11が乗場3に、ペット10がかご1内に居ることを検出する。また、判定部14は、電波発生器6及び8の電波強度の違いから飼主11がリード12を離したことを、電波受信機4及び5が受信した電波発生器8及び9の電波レベルから、リード12全体がかご1内に配置されていることを検出する。なお、上記判定を行った判定部14は、制御部15に対して戸閉指令受付許可の処理を実施する。
【0064】
図13は飼主11がペット10を連れずに一人でエレベータを利用する様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表11に示すようになる。
【0065】
【表11】
【0066】
図13に示す状態では、飼主11が携帯する電波発生器6のみが電波受信機4及び5により検出される。かかる場合、判定部14は、リード12がドアに挟まれる可能性がないため、制御部15に対し、戸閉指令受付許可の処理を実施する。なお、電波発生器6から発せられた電波のみが検出される場合は、必ずしも電波の受信強度を検出する必要はない。
【0067】
図14は飼主11が電波発生器6を携帯せずに一人でエレベータを利用する様子を示している。かかる場合、電波受信機4及び5の電波の受信状態、判定部14の判定結果及び制御部15に対する動作指令は、下記表12に示すようになる。
【0068】
【表12】
【0069】
図14に示す状態では、電波受信機4及び5による電波検知が行われない。このため、判定部14は、リード12がドアに挟まれる可能性がないため、制御部15に対し、戸閉指令受付許可の処理を実施する。
【0070】
この発明の実施の形態1によれば、ペット10、その飼主11、リード12の両端部に装着された電波発生器6乃至9からの電波を受信し、その受信した電波状態から、ペット10、飼主11、リード12両端部の各位置関係を把握するため、飼主11等がエレベータを利用する際の種々の状況に容易に対応することができる。
また、電波受信機4及び5が受信した上記各電波発生器6乃至9からの電波状態と、記憶部13に記憶された組合せ情報とに基づく判定により、リード12がドアに挟まれ得る状態にあるか否かを正確に判断できるため、リード12がドアに挟まれた状態での走行を確実に防止することが可能となる。
【0071】
なお、上記構成及び機能を有するエレベータの制御装置は、新規エレベータへの適用は当然のこと、既設エレベータに対しても適用することが可能である。
【0072】
具体的には、既設エレベータに対して、先ず、エレベータのかご1に電波受信機4を、各乗場3に電波受信機5を新設する。次に、記憶部13、判定部14、制御部15(或いは、制御部15のうち、判定部14に関連する機能)を備えた制御装置を新設し、この新設した制御装置に対して、かごドア2の駆動装置や電波受信機4及び5等を適切に接続する。
このような簡単な改修によって、既設エレベータに上記各効果を付与することができる。
【0073】
なお、上記方法は、既設エレベータに対して新規の制御装置を設置する場合の手順であるが、既設エレベータの改修は、エレベータに関する所定の機能を有する既設の制御装置に、上記記憶部13、判定部14、制御部15の各機能を付加することによって実現しても良い。このような方法によっても、上記効果を奏することができる。
【符号の説明】
【0074】
1 かご
2 かごドア
3 乗場
4、5 電波受信機
6、7、8、9 電波発生器
10 ペット
11 飼主
12 リード(引き綱)
13 記憶部
14 判定部
15 制御部
【特許請求の範囲】
【請求項1】
ペット、前記ペットの飼主、前記ペットに繋がれるリードの両端部にそれぞれ装着される各電波発生器を同一組とする組合せ情報が記憶された記憶部と、
エレベータのかごに設けられ、前記各電波発生器から発せられる電波を受信する第1電波受信機と、
エレベータの乗場に設けられ、前記各電波発生器から発せられる電波を受信する第2電波受信機と、
前記第1電波受信機及び前記第2電波受信機が受信した各電波状態、並びに、前記記憶部に記憶された前記組合せ情報に基づいて、エレベータドアの開放時に、前記リードが前記ドアに挟まれ得る状態にあるか否かを判定する判定部と、
前記判定部によって、前記リードが前記ドアに挟まれ得る状態にあると判定された場合に、前記ドアを開放保持する制御部と、
を備えたことを特徴とするエレベータの制御装置。
【請求項2】
第1電波受信機及び第2電波受信機は、
受信した電波が何れの電波発生器から発せられたものなのかを検出する機能と、
受信した電波の強度を検出する機能と、
をそれぞれ備え、
判定部は、前記第1電波受信機及び前記第2電波受信機による前記各機能の検出結果と記憶部に記憶された組合せ情報とに基づいて、ペット、前記ペットの飼主、前記ペットに繋がれるリードの両端部の各位置を特定する
ことを特徴とする請求項1に記載のエレベータの制御装置。
【請求項3】
判定部は、ペットのリードがかご及び乗場の一方のみに配置されていることを検出した場合に、前記ペットと前記ペットの飼主との位置に関わらず、前記リードがエレベータドアに挟まれ得る状態にない旨を判定し、制御部に対して、戸閉指令の受付を許可する処理を実行することを特徴とする請求項1又は請求項2に記載のエレベータの制御装置。
【請求項4】
ペット、前記ペットの飼主、前記ペットに繋がれるリードの両端部にそれぞれ装着される各電波発生器からの電波を受信可能な第1電波受信機を、エレベータのかごに新設するステップと、
前記各電波発生器からの電波を受信可能な第2電波受信機を、エレベータの乗場に新設するステップと、
前記各電波発生器を同一組とする組合せ情報が記憶された記憶部、
前記第1電波受信機及び前記第2電波受信機が受信した各電波状態、並びに、前記記憶部に記憶された前記組合せ情報に基づいて、エレベータドアの開放時に、前記リードが前記ドアに挟まれ得る状態にあるか否かを判定する判定部、
前記判定部によって、前記リードが前記ドアに挟まれ得る状態にあると判定された場合に、前記ドアを開放保持する制御部、
を有する制御装置を新設するステップと、
を備えたことを特徴とする既設エレベータの改修方法。
【請求項5】
エレベータに関する所定の機能を有する制御装置が備えられたエレベータの改修方法であって、
ペット、前記ペットの飼主、前記ペットに繋がれるリードの両端部にそれぞれ装着される各電波発生器からの電波を受信可能な第1電波受信機を、エレベータのかごに新設するステップと、
前記各電波発生器からの電波を受信可能な第2電波受信機を、エレベータの乗場に新設するステップと、
前記各電波発生器を同一組とする組合せ情報が記憶された記憶機能、
前記第1電波受信機及び前記第2電波受信機が受信した各電波状態、並びに、前記記憶手段に記憶された前記組合せ情報に基づいて、エレベータドアの開放時に、前記リードが前記ドアに挟まれ得る状態にあるか否かを判定する判定機能、
前記判定機能によって、前記リードが前記ドアに挟まれ得る状態にあると判定された場合に、前記ドアを開放保持する制御機能、
を前記制御装置に新たに付加するステップと、
を備えたことを特徴とする既設エレベータの改修方法。
【請求項1】
ペット、前記ペットの飼主、前記ペットに繋がれるリードの両端部にそれぞれ装着される各電波発生器を同一組とする組合せ情報が記憶された記憶部と、
エレベータのかごに設けられ、前記各電波発生器から発せられる電波を受信する第1電波受信機と、
エレベータの乗場に設けられ、前記各電波発生器から発せられる電波を受信する第2電波受信機と、
前記第1電波受信機及び前記第2電波受信機が受信した各電波状態、並びに、前記記憶部に記憶された前記組合せ情報に基づいて、エレベータドアの開放時に、前記リードが前記ドアに挟まれ得る状態にあるか否かを判定する判定部と、
前記判定部によって、前記リードが前記ドアに挟まれ得る状態にあると判定された場合に、前記ドアを開放保持する制御部と、
を備えたことを特徴とするエレベータの制御装置。
【請求項2】
第1電波受信機及び第2電波受信機は、
受信した電波が何れの電波発生器から発せられたものなのかを検出する機能と、
受信した電波の強度を検出する機能と、
をそれぞれ備え、
判定部は、前記第1電波受信機及び前記第2電波受信機による前記各機能の検出結果と記憶部に記憶された組合せ情報とに基づいて、ペット、前記ペットの飼主、前記ペットに繋がれるリードの両端部の各位置を特定する
ことを特徴とする請求項1に記載のエレベータの制御装置。
【請求項3】
判定部は、ペットのリードがかご及び乗場の一方のみに配置されていることを検出した場合に、前記ペットと前記ペットの飼主との位置に関わらず、前記リードがエレベータドアに挟まれ得る状態にない旨を判定し、制御部に対して、戸閉指令の受付を許可する処理を実行することを特徴とする請求項1又は請求項2に記載のエレベータの制御装置。
【請求項4】
ペット、前記ペットの飼主、前記ペットに繋がれるリードの両端部にそれぞれ装着される各電波発生器からの電波を受信可能な第1電波受信機を、エレベータのかごに新設するステップと、
前記各電波発生器からの電波を受信可能な第2電波受信機を、エレベータの乗場に新設するステップと、
前記各電波発生器を同一組とする組合せ情報が記憶された記憶部、
前記第1電波受信機及び前記第2電波受信機が受信した各電波状態、並びに、前記記憶部に記憶された前記組合せ情報に基づいて、エレベータドアの開放時に、前記リードが前記ドアに挟まれ得る状態にあるか否かを判定する判定部、
前記判定部によって、前記リードが前記ドアに挟まれ得る状態にあると判定された場合に、前記ドアを開放保持する制御部、
を有する制御装置を新設するステップと、
を備えたことを特徴とする既設エレベータの改修方法。
【請求項5】
エレベータに関する所定の機能を有する制御装置が備えられたエレベータの改修方法であって、
ペット、前記ペットの飼主、前記ペットに繋がれるリードの両端部にそれぞれ装着される各電波発生器からの電波を受信可能な第1電波受信機を、エレベータのかごに新設するステップと、
前記各電波発生器からの電波を受信可能な第2電波受信機を、エレベータの乗場に新設するステップと、
前記各電波発生器を同一組とする組合せ情報が記憶された記憶機能、
前記第1電波受信機及び前記第2電波受信機が受信した各電波状態、並びに、前記記憶手段に記憶された前記組合せ情報に基づいて、エレベータドアの開放時に、前記リードが前記ドアに挟まれ得る状態にあるか否かを判定する判定機能、
前記判定機能によって、前記リードが前記ドアに挟まれ得る状態にあると判定された場合に、前記ドアを開放保持する制御機能、
を前記制御装置に新たに付加するステップと、
を備えたことを特徴とする既設エレベータの改修方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2010−163232(P2010−163232A)
【公開日】平成22年7月29日(2010.7.29)
【国際特許分類】
【出願番号】特願2009−5457(P2009−5457)
【出願日】平成21年1月14日(2009.1.14)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
【公開日】平成22年7月29日(2010.7.29)
【国際特許分類】
【出願日】平成21年1月14日(2009.1.14)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
[ Back to top ]