
エレベータの敷居溝清掃システム、主制御部用敷居溝清掃プログラム、装置側制御部用敷居溝清掃プログラム、及びエレベータの敷居溝清掃方法
【課題】エレベータの敷居溝清掃システムにおいて、エレベータの敷居溝を十分に清掃させることである。
【解決手段】エレベータの敷居溝清掃システムにおいて、カゴ敷居溝120,122上に垂直方向にカゴ扉48,49が配置されて案内される。カゴ扉48,49は、それぞれの内部にカゴ扉側ホース136,138が配置される。カゴ扉側ホース136,138は、一端にカゴ敷居溝120,122側に向いたカゴ溝側口100,101と、他端に清掃装置44側を向いたカゴ装置側口105,107とを有している。清掃装置44は、カゴ敷居溝120,122の延長上のカゴ床上に配置され、内部に装置側ホース45,47を有している。装置側ホース45,47は、カゴ装置側口105,107に向かって突き出た吸込口143,145を有す。
【解決手段】エレベータの敷居溝清掃システムにおいて、カゴ敷居溝120,122上に垂直方向にカゴ扉48,49が配置されて案内される。カゴ扉48,49は、それぞれの内部にカゴ扉側ホース136,138が配置される。カゴ扉側ホース136,138は、一端にカゴ敷居溝120,122側に向いたカゴ溝側口100,101と、他端に清掃装置44側を向いたカゴ装置側口105,107とを有している。清掃装置44は、カゴ敷居溝120,122の延長上のカゴ床上に配置され、内部に装置側ホース45,47を有している。装置側ホース45,47は、カゴ装置側口105,107に向かって突き出た吸込口143,145を有す。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エレベータの敷居溝清掃システム、主制御部用敷居溝清掃プログラム、装置側制御部用敷居溝清掃プログラム、及びエレベータの敷居溝清掃方法に係り、特に、エレベータの敷居溝を清掃するためのエレベータの敷居溝清掃システム、主制御部用敷居溝清掃プログラム、装置側制御部用敷居溝清掃プログラム、及びエレベータの敷居溝清掃方法に関するものである。
【背景技術】
【0002】
従来のエレベータ装置では、敷居溝に小石やガラス、ごみ等の異物が溜まり、かかる異物がエレベータ装置の戸または扉と敷居溝との間に挟まった場合に、扉の開閉故障が発生することがある。そのような故障が発生した場合には、エレベータ装置の保守作業員が呼び出され、例えば、手作業で異物を取り除く等の手間が発生する。
【0003】
そこで、特許文献1には、エレベータ用敷居溝清掃装置において、エレベータ装置の扉の扉開閉方向両端下部のそれぞれにブラシとピンを備え、扉が開方向に移動するにつれて、ブラシやピンの弾性力によって異物を移動し、敷居溝の底面に設けられた排除穴に落として取り除くことが述べられている。
【0004】
【特許文献1】特開2007−62903号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
上記のように、特許文献1の構成を用いることで、エレベータの敷居溝が清掃できる。しかし、ブラシ、ピンを用いて敷居溝を機械的に移動させるだけでは、十分に敷居溝内の異物を除去できないことがある。なお、エレベータの敷居溝としては、カゴの扉のためのカゴ敷居溝と、乗場の扉のための乗場敷居溝とがある。
【0006】
本発明の目的は、エレベータの敷居溝を十分に清掃できるエレベータの敷居溝清掃システムを提供することである。
【課題を解決するための手段】
【0007】
本発明に係るエレベータの敷居溝清掃システムは、開閉機構により開閉されるカゴ扉と、カゴ扉の開閉移動を案内するカゴ敷居溝と、一端にカゴ溝側口を有し他端にカゴ装置側口を有するカゴ扉側ホースと、を含む乗りカゴと、吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、カゴ装置側口と吸込口との間を接続し又は開放する手段と、カゴ扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、清掃装置を制御する装置側制御部と、装置側制御部と通信経路を介して接続され、カゴ扉の開閉制御を含みエレベータ全体を制御する主制御部と、を備え、主制御部は、カゴ扉を全開状態とし、そこで停止させる手段と、カゴ扉の開閉状態を判断し、カゴ扉が全開状態で停止されている場合に、装置側制御部に対し、カゴ扉側ホースと装置側ホースとを接続させる接続指令を送信する手段と、装置側制御部から、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらが接続されている場合に、装置側制御部に対し、吸込機作動指令を送信する手段と、装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が作動している場合に、カゴ扉を所定回数開閉し、それに伴いカゴ扉側ホースのカゴ溝側口をカゴ敷居溝に沿って往復移動させる手段と、装置側制御部に対し、吸込機停止指令を送信する手段と、装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が停止している場合に、装置側制御部に対し、カゴ扉側ホースと装置側ホースとの接続を開放させる開放指令を送信する手段と、装置側制御部から、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらの接続が開放されている場合に、カゴ扉を閉じる手段と、を含むことを特徴とする。
【0008】
本発明に係るエレベータの敷居溝清掃システムは、開閉機構により開閉されるカゴ扉と、カゴ扉の開閉移動を案内するカゴ敷居溝と、一端にカゴ溝側口を有し他端にカゴ装置側口を有するカゴ扉側ホースと、を含む乗りカゴと、吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、カゴ装置側口と吸込口との間を接続し又は開放する手段と、カゴ扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、清掃装置を制御する装置側制御部と、装置側制御部と通信経路を介して接続され、カゴ扉の開閉制御を含みエレベータ全体を制御する主制御部と、を備え、装置側制御部は、主制御部から、カゴ扉側ホースと装置側ホースとを接続させる接続指令を受信し、これに従ってカゴ扉側ホースと装置側ホースとを接続させ、主制御部に対し、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を送信する手段と、主制御部から、吸込機作動指令を受信し、これに従って吸引機を作動させ、主制御部に対し、吸込機の作動状態の検出信号を送信する手段と、主制御部から、カゴ扉側ホースと装置側ホースとの接続を開放させる開放指令を受信し、カゴ扉側ホースと装置側ホースとの接続を開放させ、主制御部に対し、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を送信する手段と、を備えることを特徴とする。
【0009】
また、本発明に係るエレベータの敷居溝清掃システムにおいて、カゴ扉側ホースと装置側ホースの少なくともいずれか一方が伸縮可能であることが好ましい。
【0010】
また、清掃装置は、乗りカゴに設けられることが好ましい。
【0011】
また、本発明に係るエレベータの敷居溝清掃システムにおいて、カゴ扉側ホースと装置側ホースとを接続し又は開放する手段は、電磁石を用いるものであって、カゴ扉側ホースと装置側ホースとを接続するときの電磁石通電方向と、カゴ扉側ホースと装置側ホースとの接続を開放するときの電磁石通電方向とは、互いに逆の通電方向であることが好ましい。
【0012】
また、主制御部は、外部の管理センタとネットワークで接続され、管理センタからの清掃指令を受信し、これにしたがってエレベータの敷居溝清掃システムを作動させることが好ましい。
【0013】
本発明に係るエレベータの敷居溝清掃システムは、開閉機構により開閉される乗場扉と、乗場扉の開閉移動を案内する乗場敷居溝と、一端に乗場溝側口を有し他端に乗場装置側口を有する乗場扉側ホースと、を含む乗場部と、吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、乗場装置側口と吸込口との間を接続し又は開放する手段と、乗場扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、清掃装置を制御する装置側制御部と、装置側制御部と通信経路を介して接続され、乗場扉の開閉制御を含みエレベータ全体を制御する主制御部と、を備え、主制御部は、乗場扉を全開状態とし、そこで停止させる手段と、乗場扉の開閉状態を判断し、乗場扉が全開状態で停止されている場合に、乗場扉側ホースと装置側ホースとを接続させる接続指令を送信する手段と、装置側制御部から、乗場扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらが接続されている場合に、装置側制御部に対し、吸込機作動指令を送信する手段と、装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が作動している場合に、乗場扉を所定回数開閉し、それに伴い乗場扉側ホースの乗場溝側口を乗場敷居溝に沿って往復移動させる手段と、装置側制御部に対し、吸込機停止指令を送信する手段と、装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が停止している場合に、装置側制御部に対し、乗場扉側ホースと装置側ホースとの間を開放させる開放指令を送信する手段と、装置側制御部から、乗場扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらの接続が開放されている場合に、乗場扉を閉じる手段と、を含むことを特徴とする。
【0014】
本発明に係るエレベータの敷居溝清掃システムは、開閉機構により開閉される乗場扉と、乗場扉の開閉移動を案内する乗場敷居溝と、一端に乗場溝側口を有し他端に乗場装置側口を有する乗場扉側ホースと、を含む乗場部と、吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、乗場装置側口と吸込口との間を接続し又は開放する手段と、乗場扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、清掃装置を制御する装置側制御部と、装置側制御部と通信経路を介して接続され、乗場扉の開閉制御を含みエレベータ全体を制御する主制御部と、を備え、装置側制御部は、主制御部から、乗場扉側ホースと装置側ホースとを接続させる接続指令を受信し、これに従って乗場扉側ホースと装置側ホースとを接続させ、主制御部に対し、乗場扉側ホースと装置側ホースとの接続状態の検出信号を送信する手段と、主制御部から、吸込機作動指令を受信し、これに従って吸引機を作動させ、主制御部に対し、吸込機の作動状態の検出信号を送信する手段と、主制御部から、吸込機停止指令を受信し、これに従って吸引機を停止させ、主制御部に対し、吸込機の作動状態の検出信号を送信する手段と、主制御部から、乗場扉側ホースと装置側ホースとの接続を開放させる開放指令を受信し、乗場扉側ホースと装置側ホースとの接続を開放させ、主制御部に対し、乗場扉側ホースと装置側ホースとの接続状態の検出信号を送信する手段と、を備えることを特徴とする。
【0015】
また、清掃装置は、乗りカゴに設けられることが好ましい。
【0016】
また、清掃装置は、さらに清掃装置を回転させる回転駆動機構を備え、回転駆動機構は、管理センタからの清掃指令が、カゴ敷居溝清掃指令か乗場敷居溝清掃指令かに応じて、清掃装置の吸込口をカゴ装置側口に接続できる位置と清掃装置の吸込口を乗場装置側口に接続できる位置との間で清掃装置を回転させることが好ましい。
【0017】
また、清掃装置は、さらに清掃装置を移動させる移動機構を備え、移動機構は、管理センタからの清掃指令が、カゴ敷居溝清掃指令か乗場敷居溝清掃指令かに応じ、乗りカゴの床面に平行な方向であって乗場扉側に清掃装置を移動させることが好ましい。
【0018】
本発明に係る主制御部用敷居溝清掃プログラムは、開閉機構により開閉されるカゴ扉と、カゴ扉の開閉移動を案内するカゴ敷居溝と、一端にカゴ溝側口を有し他端にカゴ装置側口を有するカゴ扉側ホースと、を含む乗りカゴと、吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、カゴ装置側口と吸込口との間を接続し又は開放する手段と、カゴ扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、清掃装置を制御する装置側制御部と、装置側制御部と通信経路を介して接続され、カゴ扉の開閉制御を含みエレベータ全体を制御する主制御部と、を備えるエレベータの敷居溝清掃システムの主制御部上で実行される主制御部用敷居溝清掃プログラムであって、カゴ扉を全開状態とし、そこで停止させる処理手順と、カゴ扉の開閉状態を判断し、カゴ扉が全開状態で停止されている場合に、装置側制御部に対し、カゴ扉側ホースと装置側ホースとを接続させる接続指令を送信する処理手順と、装置側制御部から、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらが接続されている場合に、装置側制御部に対し、吸込機作動指令を送信する処理手順と、装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が作動している場合に、カゴ扉を所定回数開閉し、それに伴いカゴ扉側ホースのカゴ溝側口をカゴ敷居溝に沿って往復移動させる処理手順と、装置側制御部に対し、吸込機停止指令を送信する処理手順と、装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が停止している場合に、装置側制御部に対し、カゴ扉側ホースと装置側ホースとの接続を開放させる開放指令を送信する処理手順と、装置側制御部から、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらの接続が開放されている場合に、カゴ扉を閉じる処理手順と、が実行されることを特徴とする。
【0019】
本発明に係る装置側制御部用敷居溝清掃プログラムは、開閉機構により開閉されるカゴ扉と、カゴ扉の開閉移動を案内するカゴ敷居溝と、一端にカゴ溝側口を有し他端にカゴ装置側口を有するカゴ扉側ホースと、を含む乗りカゴと、吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、カゴ装置側口と吸込口との間を接続し又は開放する手段と、カゴ扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、清掃装置を制御する装置側制御部と、装置側制御部と通信経路を介して接続され、カゴ扉の開閉制御を含みエレベータ全体を制御する主制御部と、を備えるエレベータの敷居溝清掃システムの装置側制御部上で実行される装置側制御部用敷居溝清掃プログラムであって、主制御部から、カゴ扉側ホースと装置側ホースとを接続させる接続指令を受信し、これに従ってカゴ扉側ホースと装置側ホースとを接続させ、主制御部に対し、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を送信する処理手順と、主制御部から、吸込機作動指令を受信し、これに従って吸引機を作動させ、主制御部に対し、吸込機の作動状態の検出信号を送信する処理手順と、主制御部から、吸込機停止指令を受信し、これに従って吸引機を停止させ、主制御部に対し、吸込機の作動状態の検出信号を送信する処理手順と、主制御部から、カゴ扉側ホースと装置側ホースとの接続を開放させる開放指令を受信し、カゴ扉側ホースと装置側ホースとの接続を開放させ、主制御部に対し、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を送信する処理手順と、が実行されることを特徴とする。
【0020】
本発明に係るエレベータの敷居溝清掃方法は、エレベータの乗りカゴのカゴ扉を案内する敷居溝を清掃するエレベータの敷居溝清掃方法であって、カゴ扉を全開状態とし、そこで停止させる工程と、乗りカゴに設けられ一端にカゴ溝側口を有し他端にカゴ装置側口を有するカゴ扉側ホースと吸込口が配置され吸込機に設けられる装置側ホースとを接続させる工程と、吸込機を作動させる工程と、カゴ扉を所定回数開閉し、それに伴いカゴ扉側ホースのカゴ溝側口をカゴ敷居溝に沿って往復移動させる工程と、カゴ扉を閉じる工程とを含むことを特徴とする。
【発明の効果】
【0021】
上記構成の少なくとも1つにより、主制御部は、カゴ扉を所定回数開閉し、それに伴いカゴ扉側ホースのカゴ溝側口をカゴ敷居溝に沿って往復移動させ、カゴ扉側ホースに接続された吸込機の吸込力により清掃を行う。したがって、十分にカゴ敷居溝を清掃することができる。
【0022】
また、上記構成の少なくとも1つにより、主制御部は、乗場扉を所定回数開閉し、それに伴い乗場扉側ホースの乗場溝側口を乗場敷居溝に沿って往復移動させ、乗場扉側ホースに接続された吸込機の吸込力により清掃を行う。したがって、十分に乗場敷居溝を清掃することができる。
【0023】
また、上記構成の少なくとも1つにより、カゴ敷居溝と乗場敷居溝が清掃できるので、扉の開閉故障を抑制することができる。したがって、エレベータ装置の保守作業員が呼び出されることを抑制することができる。
【発明を実施するための最良の形態】
【0024】
以下に、図面を用いて本発明に係る実施の形態につき、詳細に説明する。なお、以下では、カゴ扉、乗場扉については、片側から開閉されるいわゆる片開き扉について説明を行うが、両側から開閉されるいわゆる両開き扉であってもよい。また、以下ではカゴ扉、乗場扉については、それぞれ2枚の扉から構成される場合について説明するが、1枚の扉から構成される場合であってもよい。また、以下では、主制御部は、エレベータが設置されるビル等の最上階の機械室に配置される場合として説明するが、機械室を特別に設けずにエレベータの昇降路の最下部であるいわゆるピット等に配置されるいわゆる機械室レスエレベータであってもよい。また、以下では、管理センタは外部に設置されている場合として説明するが、同一のビル内に設置されている場合であってもよい。また、以下では、ネットワークとしてインタネットを例として説明するが、LAN等のネットワークを用いてもよい。また、以下では、清掃装置は乗りカゴに設けられているものとして説明するが、乗場側に設けるものも同様に実施できる。また、以下では、カゴ溝側口と乗場溝側口については1箇所設けられていることとして説明しているが、2箇所以上のカゴ溝側口と乗場溝側口であってもよい。
【0025】
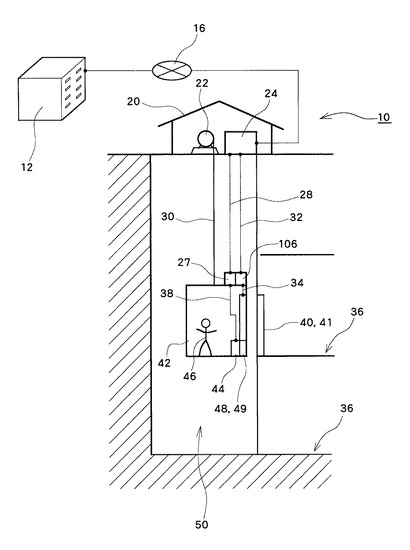
図1は、エレベータの敷居溝清掃システム10を示す図である。エレベータの敷居溝清掃システム10は、昇降路50内を移動する乗りカゴ42と、乗りカゴ42を昇降させるための主ロープ30と、主ロープ30を駆動し乗りカゴ42を昇降させる機能を有する巻上機22と、乗客46が乗りカゴ42に乗り降りする乗場36と、エレベータの敷居溝清掃システム10の作動を含み、エレベータの作動を全体として制御する主制御部24と、カゴ敷居溝あるいは乗場敷居溝を清掃する清掃装置44と、清掃装置44を制御する装置側制御部27と、カゴ扉48,49及び乗場扉40,41の開閉駆動を行う開閉駆動装置106とを含んで構成される。
【0026】
巻上機22と主制御部24は、ビルの最上階に設置される機械室20の内部に配置される。また、管理センタ12と主制御部24は、例えばインタネット16を介して相互に接続される。また、主制御部24と開閉駆動装置106との間、主制御部24と装置側制御部27との間は、それぞれ通信ケーブル32、28を介して接続される。
【0027】
図2は、エレベータの敷居溝清掃システム10を示す図である。なお、以下では図1の要素と同一の要素については、同一の符号を用いて説明する。エレベータの敷居溝清掃システム10は、カゴ扉48,49と清掃装置44等を有する乗りカゴ部102と、上記に示された管理センタ12と、主制御部24と装置側制御部27とを含んで構成される。まず、乗りカゴ部102の詳細について説明し、次に、管理センタ12、主制御部24、装置側制御部27の詳細を説明する。
【0028】
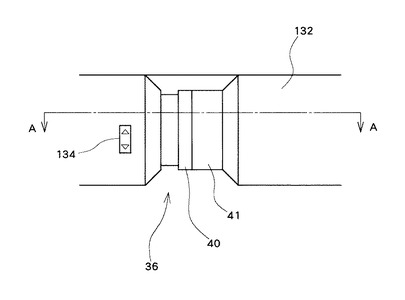
図3から図7に乗りカゴ部102の詳細を示す。なお、以下では図1、図2の要素と同様の要素については、同一の符号を付し、詳細な説明は省略する。また、以下では図1、図2の符号を用いて説明する。図3は、乗場36周辺を示す図である。乗場36周辺は、乗場36と昇降路50とを区画する乗場壁132と、乗りカゴ42を呼ぶための乗場ボタン134と、乗場側に設けられる乗場扉40,41とを含んで構成される。
【0029】
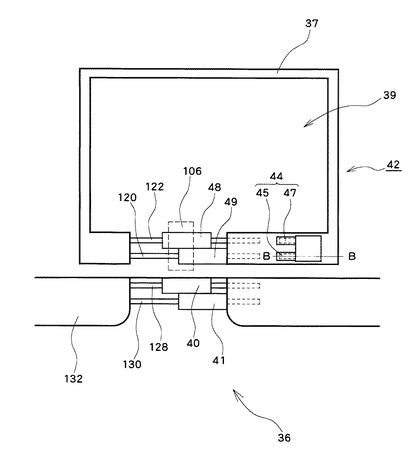
図4は、図3におけるA−A断面図であり、乗りカゴ42と乗場36を上面から見た図である。乗りカゴ42は、カゴ室39と、カゴ扉48,49を案内するカゴ敷居溝120,122と、カゴ敷居溝120,122の長手方向の一端の延長線上に配置される2つの装置側ホース45,47を有する清掃装置44と、カゴ扉48,49及び乗場扉40,41の開閉を行う開閉制御装置106と、図示されていない開閉センサとを含んで構成される。乗場36は、乗場扉40,41を案内する乗場敷居溝128,130と、図示されていない開閉センサを含んで構成される。
【0030】
カゴ室39は、適当な人数の乗客が乗ることができる程度の広さを有し、その周辺はカゴ壁37で覆われており、乗客が乗降できる開口部すなわち乗りカゴ側の出入口を有している。かかる開口部は、カゴ扉48,49がカゴ敷居溝120,122により案内されることにより開閉される。また、乗場36の乗場壁132についても、乗りカゴ42の開口部に対向する部分に対応する開口部、すなわち乗場側の出入口が設けられている。この開口部は、乗場扉40,41が乗場敷居溝128,130により案内されることにより開閉される。
【0031】
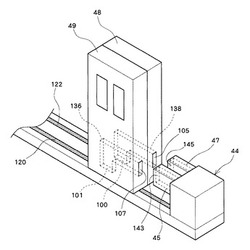
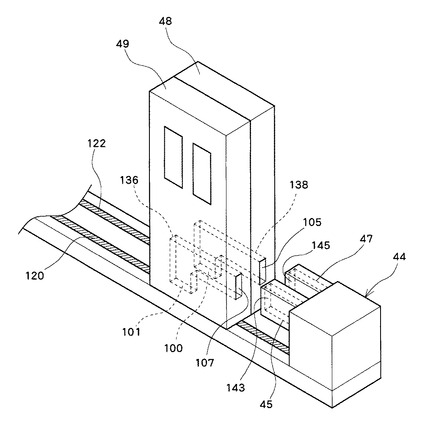
図5は、図4において示されるカゴ扉48,49と、カゴ敷居溝120,122と、清掃装置44の部分を抜き出して詳細に説明する図である。カゴ扉48,49は、カゴ扉48,49を案内するカゴ敷居溝120,122上に垂直方向に配置されている。カゴ扉48,49は、それぞれの内部にカゴ扉側ホース136,138が配置される。カゴ扉側ホース136,138は、一端に、カゴ敷居溝120,122側に向いたカゴ溝側口100,101と他端に、清掃装置44側を向いたカゴ装置側口105,107とを有している。なお、カゴ扉48,49のうち、カゴ装置側口105,107の周辺は磁性体で構成されている。清掃装置44は、カゴ敷居溝120,122の延長上の乗りカゴ床上に配置されている。また、清掃装置44は、内部に装置側ホース45,47を有している。装置側ホース45,47は、カゴ装置側口105,107に向かって突き出た吸込口143,145を有している。
【0032】
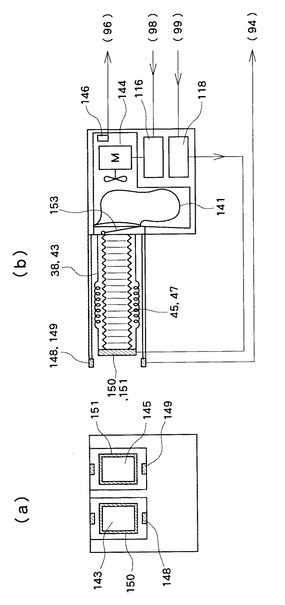
図6は、清掃装置44の詳細図で、図6(a)は側面図、図6(b)は、図4において示される清掃装置44のB−B断面図である。清掃装置44は、吸込モータを含んで構成される吸込機144と、吸込口143,145を有し、軸方向に自由に伸縮できる装置側ホース45,47と、吸込機144により吸い込んだゴミを保管するゴミ保管部141と、吸い込んだゴミの逆流を防止する蓋部153と、吸込機144の作動状態を検出する作動センサ146と、カゴ扉側ホース136,138と装置側ホース45,47との間の接続状態を検出する接続センサ148,149と吸込機制御装置116と接続制御装置118とを含んで構成される。また、装置側ホース45,47の先端には、電磁石150,151が配置されている。吸込機制御装置116は、吸込機制御I/F98を介して得られた指令により、吸込機144を通電する。接続制御装置118は、電磁石150,151に通電する機能を有する。
【0033】
装置側ホース45,47は、蛇腹状のホースであって、その先端に取り付けられた電磁石150,151から他端が取付けられた壁に跨ってホースの伸縮を復元方向に付勢しているバネ38,43が取り付けられている。
【0034】
電磁石150,151は、磁性材料の芯の周りに、コイルを巻き、通電することによって磁力を発生させる磁石であり、接続制御装置118からの通電により、その磁力によって、電磁石150,151とカゴ扉48,49、すなわちカゴ扉側ホース136,138と装置側ホース45,47とは接続される。したがって、この状態のままカゴ扉48,49が移動すれば、装置側ホース45,47は伸長することとなる。一方、電磁石150,151への通電を停止すれば、電磁石150,151は、磁力を失うことから、カゴ扉48,49との接続は開放される。したがって、装置側ホース45,47はバネ38,43の付勢力で縮小し、元通りの形状になる。
【0035】
なお、電磁石150,151とカゴ扉48,49、すなわちカゴ扉側ホース136,138と装置側ホース45,47との接続開放については、上記の通電とは逆方向に通電を行い、電磁石150,151の反発力によって、接続を強制的に開放してもよい。
【0036】
接続センサ148,149は、一対の発光素子と受光素子とで構成される受発光素子で、発光素子と受光素子との間に装置側ホース45,47がある場合には発光素子の光が受光素子に伝達せず、発光素子と受光素子との間に装置側ホース45,47がない場合には発光素子の光が受光素子に伝達する。
【0037】
再び図2に戻って、外部に設置される管理センタ12は、エレベータの作動を監視する機能を有し、主制御部24とはインタネット16を介して接続される。ここでは、図2の場合において、管理センタ12から主制御部24に対して清掃モード等の指令等を送信する。
【0038】
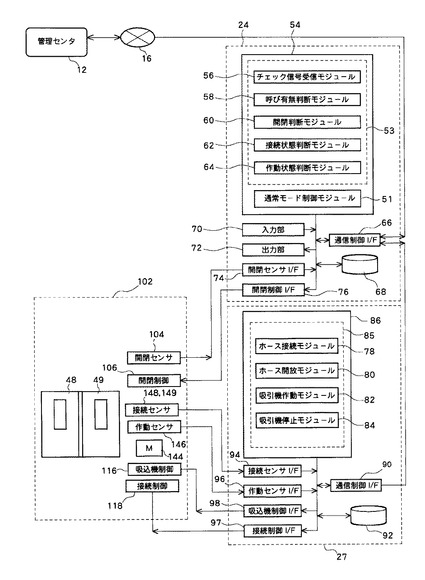
主制御部24は、エレベータの速度制御、運行管理制御、その他必要な制御を行う機能を有する。主制御部24は、主制御CPU54と、制御入力ボタン等の入力部70と、点灯ランプ、ディスプレイ等の出力部72と、プログラム等を記憶する記憶装置68と、乗りカゴ部102内に配置された開閉制御装置106との間で通信を行う開閉制御I/F76と、乗りカゴ部102内に配置された開閉センサ104との間で通信を行う開閉センサI/F74と、管理センタ12とインタネット16を介して通信を行い、また、装置側制御部27と装置側制御部27に配置される通信制御I/F90を介して通信を行うための通信制御I/F66とを含んで構成される。
【0039】
かかる主制御部24は、エレベータの制御に適したコンピュータを用いることができる。また、駆動回路等と論理回路等の複数の電気回路を組み合わせて構成するものを用いてもよい。
【0040】
主制御CPU54は、カゴ敷居溝清掃モジュール群53と通常モード制御モジュールとを含んで構成される。カゴ敷居溝清掃モジュール群53は、カゴ扉48,49の開閉状態を判断する開閉判断モジュール60と、カゴ扉側ホース136,138と装置側ホース45,47との接続状態を判断する接続状態判断モジュール62と、吸込機の作動状態を判断する作動状態判断モジュール64と、管理センタ12から清掃指令を受け取るチェック信号受信モジュール56と、乗りカゴの呼びの有無を判断する呼び有無判断モジュール58とを含んで構成される。
【0041】
装置側制御部27は、清掃装置44を制御する機能を有する。装置側制御部27は、装置側CPU86と、プログラム等を記憶する記憶装置92と、主制御部24との通信を行う通信制御I/F90と、乗りカゴ部102内に配置された接続センサ148,149との間で通信を行う接続センサI/F94と、乗りカゴ部102内に配置された作動センサ112との間で通信を行う作動センサI/F96と、乗りカゴ部102内に配置された吸込機制御装置116との間で通信を行う吸込機制御I/F98と乗りカゴ部102内に配置された接続制御装置118との間で通信を行う接続制御I/F97とを含んで構成される。
【0042】
かかる装置側制御部27は、エレベータの制御に適したコンピュータを用いることができる。また、駆動回路等と論理回路等の複数の電気回路を組み合わせて構成するものを用いてもよい。
【0043】
装置側CPU86は、カゴ敷居溝清掃モジュール群85から構成され、カゴ敷居溝清掃モジュール群は、カゴ扉側ホース136,138と装置側ホース45,47とを接続するホース接続モジュール78と、カゴ扉側ホース136,138と装置側ホース45,47との接続を開放するホース開放モジュール80と、清掃装置44に配置された吸込機144を作動させる吸込機作動モジュール82と、清掃装置44に配置された吸込機144を停止させる吸込機停止モジュール84とを含んで構成される。
【0044】
これらの各機能は、ソフトウェアを実行することで実現でき、具体的には、対応する主制御部用敷居溝清掃プログラムと装置側制御部用敷居溝清掃プログラムとを実行することで実現できる。またかかる機能の一部あるいは全部をハードウェアで実現するものとしてもよい。
【0045】
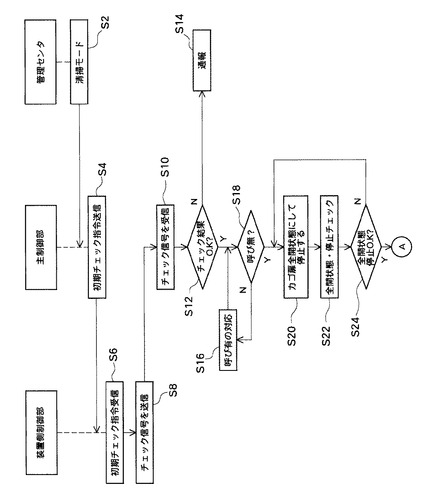
かかる構成の作用、特に、主制御部24を構成する主制御CPU54の各機能と、装置側制御部27を構成する装置側CPU86の各機能を、図7のフローチャートを用いて以下に説明する。また、図7のフローチャートは、エレベータのカゴ敷居溝を清掃する各手順を示す図で、その各手順は、主制御部用敷居溝清掃プログラムと装置側制御部用敷居溝清掃プログラムの各処理手順にそれぞれ対応する。以下では図1から図6の要素と同様の要素については、同一の符号を付し、詳細な説明は省略する。
【0046】
通常時においては、主制御部24上で、エレベータの作動を全体として制御するエレベータ制御プログラムが実行されて、乗りカゴ42の昇降等のエレベータ全体のシステムが稼動している。
【0047】
エレベータのカゴ敷居溝を清掃する必要が生じると、管理センタ12から主制御部24に対しカゴ敷居溝清掃モード指令が送信される(S2)。
【0048】
主制御部24は、カゴ敷居溝清掃モード指令を受け取ると、通常モードから清掃モードに切り替える。ここでは、カゴ敷居溝清掃モードへとプログラムを切り替える。カゴ敷居溝清掃モードに切り替わると、主制御部24上では、主制御部用敷居溝清掃プログラムが実行される。
【0049】
カゴ敷居溝清掃モードに切り替わると、主制御部24は、装置側制御部27に対し、初期チェックを行う指令を送信する(S4)。初期チェック指令は、装置側制御部27を介して乗りカゴ部102を初期化し、システムを起動するためのものである。
【0050】
そこで、装置側制御部27は、初期チェック指令を受信する(S6)と、装置側制御部27は、初期化を行いその結果を示す初期チェック信号を主制御部24に対して送信する(S8)。チェック信号は、例えば、装置側制御部27、乗りカゴ部102の各ステータスを送信してもよく、端的に初期化が正常に行われたか否かを0,1の2値で送信してもよい。そこで、主制御部24は、初期チェック信号結果を受信する(S10)。この工程は、主制御CPU54のチェック信号受信モジュール56の機能によって実行される。
【0051】
主制御部24は、チェック信号を受信すると、チェック信号の結果を判断する(S12)。チェック信号の判断は、例えば、上記の例で正常に行われている旨の信号を受信すれば、チェック結果がOKであると判断し、正常に行われていない旨の信号を受信すれば、チェック結果がNGであると判断する。
【0052】
チェック結果がOKとされないときは、管理センタ12に対し通報を行う処理手順が実行される(S14)。具体的には、インタネット16を介して通報される。
【0053】
チェック結果がOKとされるときは、乗場36からの呼びの有無を判断する(S18)。この工程は、主制御CPU54の呼び有無判断モジュール58の機能によって実行される。具体的には、各階の乗場36に設置されたいずれかの乗場ボタン134が押されていないときは呼び無と判断され、1つの乗場ボダン134でも押されていれば呼び有と判断される。
【0054】
呼び無と判断されない場合には、呼びが有として対応が行われ(S16)、再びS18に戻る。
【0055】
呼び無と判断された場合には、カゴ扉48,49を全開状態にして停止する(S20)。具体的には、主制御部24からの開閉指令が開閉制御I/F76を介して開閉制御装置106に伝達され、開閉制御装置106はカゴ扉48,49を全開状態にして停止させる。そして、主制御部24は、カゴ扉48,49が全開状態で停止しているか否かをチェックする(S22)。
【0056】
そして、チェックの結果、カゴ扉48,49が全開状態で停止されているか否かが判断される(S24)。この工程は、主制御CPU54の開閉判断モジュール60の機能によって実行される。具体的には、カゴ扉48,49がカゴ壁37に完全に収まって停止されている状態であれば、全開状態で停止されていると判断され、カゴ扉48,49がカゴ壁37に完全に収まっていない半開状態、あるいは停止していない動作中の状態であれば、全開状態で停止されていないと判断される。カゴ扉48,49が全開状態で停止されていないと判断された場合には、再びS20に戻る。
【0057】
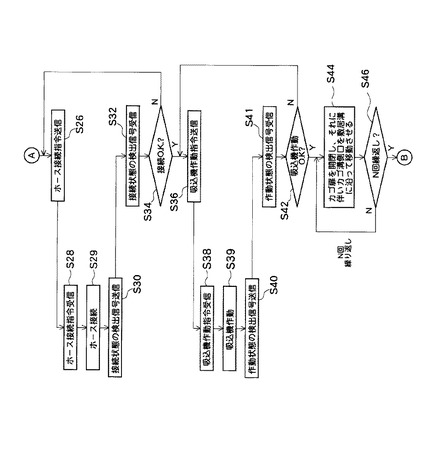
カゴ扉48,49が全開状態で停止されている場合には、主制御部24は、装置側制御部27に対し、カゴ扉側ホース136,138と装置側ホース45,47とのホース接続指令を送信する(S26)。
【0058】
装置側制御部27は、ホース接続指令を受信すると(S28)、これに従ってカゴ扉側ホース136,138と装置側ホース45,47とを接続させる(S29)。この工程は、装置側CPU86のホース接続モジュール78の機能によって実行される。具体的には装置側制御部27からの接続制御I/F97を介して接続制御装置118に指令を行い、接続制御装置118は、清掃装置44に備えられた装置側ホース45,47の先端に配置された電磁石150,151に通電を行う。したがって、装置側ホース45,47の先端に配置された電磁石150,151とカゴ扉側ホース136,138が配置されたカゴ扉48,49とは、磁力によって接続される。
【0059】
そして、装置側制御部27は、主制御部24に対し、カゴ扉側ホース136,138と装置側ホース45,47との接続状態の検出信号を送信する(S30)。検出信号は、上記の例で電磁石150,151に通電が行われ、これにより電磁石150,151が正常に作動し、電磁石150,151とカゴ扉48,49とが接続されているか否かを確認するために行われるものである。上記の検出信号は、例えば、接続センサ148,149から出力される検出信号であり、かかる信号は、接続センサI/F94を介して装置側制御部27に送信され、さらに通信制御I/F90と通信制御I/F66を経由して主制御部24に送信される。
【0060】
主制御部24は、装置側制御部27からのホース接続状態の検出信号を受信する(S32)。上記のホース接続状態の検出信号を受信すると、カゴ扉側ホース136,138と装置側ホース45,47と接続状態が判断される(S34)。この工程は、主制御CPU54の接続状態判断モジュール62の機能により実行される。具体的には、例えば、上記の例で言えば一対の受発光素子である接続センサ148,149から出力される検出信号を受信し、光が遮断されていることを示す信号であれば、接続OKと判断し、光が遮断されていないことを示す信号であれば、接続NGと判断される。
【0061】
カゴ扉側ホース136,138と装置側ホース45,47との接続がOKでない場合には、再びS26に戻る。カゴ扉側ホース136,138と装置側ホース45,47との接続がOKである場合には、主制御部24は、装置側制御部27に対し、吸込機作動指令を送信する(S36)。
【0062】
装置側制御部27は、吸込機作動指令を受信し(S38)、これに従って吸引機を作動させる(S39)。この工程は、装置側CPU86の吸込機作動モジュール82の機能によって実行される。具体的には、装置側制御部27から吸込機制御I/F98を介して吸込機制御装置116に指令を行い、吸込機制御装置116は、この指令を受けるとモータに通電し、吸込機144を作動させる。
【0063】
次に、吸込機144の作動状態の検出信号を送信する(S40)。検出信号は、モータに通電し、吸込機144が作動されているか否かを確認するために行われるものである。上記の検出信号は、例えば、作動センサ146において、モータに供給されている電流又は電圧の有無に基づいて信号を生成する。かかる信号が作動センサI/F96を介して装置側制御部27に送信され、さらに通信制御I/F90と通信制御I/F66を経由して主制御部24に送信される。
【0064】
主制御部24は、吸込機144の作動状態の検出信号を受信する(S41)と、吸込機144の作動状態を判断する(S42)。この工程は、主制御CPU54の作動状態判断モジュール64の機能によって実行される。具体的には、例えば、上記の例で言えば作動センサ146から出力される信号を受信し、電流等が有るとされる信号の場合は作動OKと判断し、電流等が無いとされる信号の場合は作動NGと判断される。吸込機144の作動がNGの場合は、再びS36に戻る。
【0065】
吸込機144の作動がOKの場合は、主制御部24からの開閉指令が開閉制御I/F76を介して開閉制御装置106に伝達され、カゴ扉48,49を開閉し、それに伴いカゴ扉側ホース136,138のカゴ溝側口100,101をカゴ敷居溝120,122に沿って往復移動させる(S44)。そして、上記の処理手順S44が所定の回数繰り返されたか否かを判断する(S46)。所定の回数繰り返されていない場合には、再びS44に戻る。
【0066】
なお、所定の回数は任意に設定された複数の回数とすることができる。また、カゴ扉48,49の開閉が正常か異常かを検出する手段を有するときは、カゴ扉48,49が正常となった回数で止めるとしてもよい。
【0067】
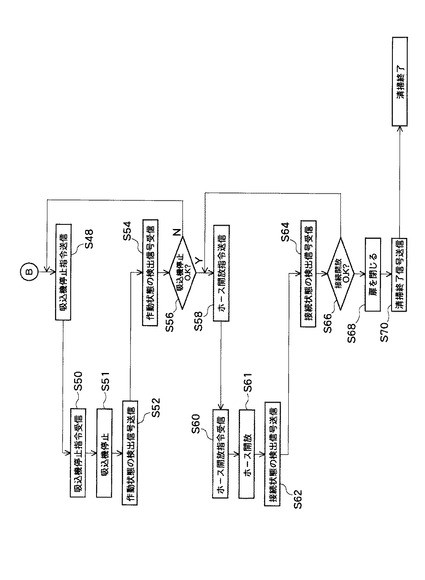
所定の回数繰り返されているときは、往復移動は停止され、そして、主制御部24は、装置側制御部27に対し、吸込機停止指令を送信する(S48)。装置側制御部27は、吸込機停止指令を受信すると(S50)、これに従って吸引機を停止させる(S51)。この工程は、装置側CPU86の吸込機停止モジュール84の機能によって実行される。具体的には、装置側制御部27から吸込機制御I/F98を介して吸込機制御装置116に指令を行い、吸込機制御装置116は、モータの通電を止め、吸込機144を停止させる。
【0068】
次に、装置側制御部27は、主制御部24に対し、吸込機144の作動状態の検出信号を送信する(S52)。検出信号は、モータの通電を停止し、吸込機144が停止されているか否かを確認するために行われるものである。上記の検出信号は、例えば、作動センサ146において、モータに供給されている電流又は電圧の有無に基づいて信号を生成する。かかる信号が作動センサI/F96を介して装置側制御部27に送信され、さらに通信制御I/F90と通信制御I/F66を経由して主制御部24に送信される。
【0069】
主制御部24は、吸込機144の作動状態の検出信号を受信する(S54)と、吸込機144の作動状態を判断する(S56)。この工程は、主制御CPU54の作動状態判断モジュール64の機能によって実行される。具体的には、例えば、上記の例で言えば作動センサ146から出力される信号を受信し、電流等が有るとされる信号の場合は作動OKと判断し、電流等が無いとされる信号の場合は作動NGと判断される。吸込機144の停止がNGの場合には、再びS48に戻る。
【0070】
吸込機144の停止がOKの場合には、主制御部24は装置側制御部27に対し、カゴ扉側ホース136,138と装置側ホース45,47の接続を開放するホース開放指令を送信する(S58)。装置側制御部27は、ホース開放指令を受信すると(S60)、これに従ってカゴ扉側ホース136,138と装置側ホース45,47との接続を開放させる(S61)。この工程は、装置側CPU86のホース開放モジュール80の機能によって実行される。具体的には、清掃装置44に備えられた装置側ホース45,47の先端に配置された電磁石150,151の通電を停止し、磁力が失われることにより装置側ホース45,47の先端に配置された電磁石150,151とカゴ扉側ホース136,138が配置されたカゴ扉48,49との接続は開放される。さらに装置側ホース45,47は、バネ38,43の復元力によって所定の位置に戻る。
【0071】
そして、装置側制御部27は、主制御部24に対し、カゴ扉側ホース136,138と装置側ホース45,47との接続状態の検出信号を送信する(S62)。検出信号は、上記の例で電磁石150,151に通電が停止され、電磁石150,151とカゴ扉48,49との接続が開放されているか否かを確認するために行われるものである。上記の検出信号は、例えば、接続センサ148,149により出力される信号であり、かかる信号は、接続センサI/F94を介して装置側制御部27に送信され、さらに通信制御I/F90と通信制御I/F66を経由して主制御部24に送信される。
【0072】
次に、主制御部24は、装置側制御部27からのホース接続状態の検出信号を受信する(S64)と、カゴ扉側ホース136,138と装置側ホース45,47との接続状態が判断される(S66)。この工程は、主制御CPU54の接続状態判断モジュール62の機能により実行される。具体的には、例えば、上記の例で言えば一対の受発光素子である接続センサ148,149から出力される検出信号を受信し、光が遮断されていないことを示す信号であれば、接続の開放OKと判断し、光が遮断されていることを示す信号であれば、接続の開放NGと判断される。
【0073】
カゴ扉側ホース136,138と装置側ホース45,47との接続の開放がOKでない場合には、再びS58に戻る。カゴ扉側ホース136,138と装置側ホース45,47との接続の開放がOKである場合には、カゴ扉を閉じる(S68)。
【0074】
次に、管理センタ12に対し、清掃終了信号を送信する(S70)。そして、清掃モードから通常モードへと切り換える。
【0075】
管理センタ12は、主制御部24からの清掃終了信号を受信する。以上でエレベータのカゴ敷居溝120,122の清掃が終了する。
【0076】
上記では、カゴ敷居溝の清掃について述べたが、エレベータの敷居溝としては、カゴ敷居溝の他に乗場敷居溝もある。この場合に、乗場扉にも同様のホースを設け、各階の乗場に清掃装置を設置して乗場敷居溝の清掃を行ってもよい。また、乗場扉に配置されたホースに上記で述べた乗りカゴの清掃装置を接続するものとしてもよい。この場合は、接続した後は上記のカゴ敷居溝を清掃する場合と同様に清掃装置を作動させることにより清掃できる。このためには、例えば、清掃装置を回転させる必要がある。このように乗りカゴの清掃装置を用いて、乗場敷居溝を清掃するエレベータの敷居溝清掃システムと、上記のカゴ敷居溝を清掃するエレベータの敷居溝清掃システム10との相違は、清掃装置をカゴ扉側から乗場扉側へと回転させることと、清掃が終了した後は再び乗場扉側からカゴ扉側へ清掃装置を逆回転させて戻すことが中心である。以下では、その清掃装置の回転と、乗場扉とのホース接続を中心に説明する。ここで、乗場扉とカゴ扉とは、開閉制御装置で同時に開閉するものとする。なお、乗場扉を清掃するのは、開閉故障が特定の階で生じていることが明らかな場合は、その階のみを清掃するだけでよい。一方、開閉故障が特定されていないときは、全部の階を順次清掃することになる。以下では、特定の階のみを清掃する場合について説明するが、全部の階を清掃する場合も同様に実施できる。
【0077】
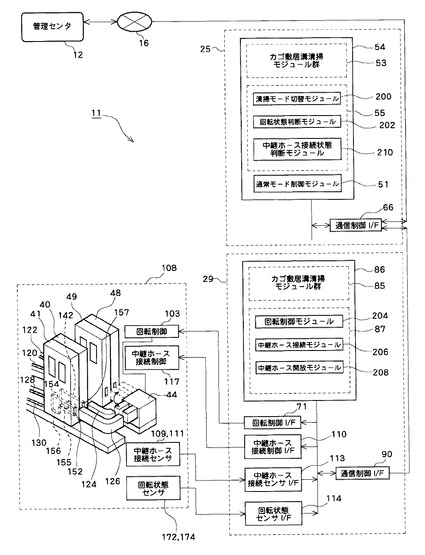
図8は、エレベータの敷居溝清掃システム11を示す図である。なお、以下では図1から図7の要素と同様の要素については、同一の符号を用いて詳細な説明を省略する。上記のように清掃モードをカゴ扉敷居溝清掃モードから乗場扉側敷居溝清掃モードに切り替える場合に、追加される構成を中心に示してある。ここで、図8は、図2において示したエレベータの敷居溝清掃システム10のうち、主制御部24と同様の構成を有する主制御部25と、装置側制御部27に回転制御I/F71と中継ホース接続制御I/F110と中継ホース接続センサI/F113と回転状態センサI/F114を加えた装置側制御部29と、乗りカゴ部108と、管理センタ12とを含んで構成される。
【0078】
乗りカゴ部108は、図2で説明した乗りカゴ部102において、少なくとも乗場装置側口152,157周辺が磁性体で構成された乗場扉40,41と、乗場敷居溝128,130と、乗場扉41,40に配置された乗場扉側ホース142,154と、清掃装置44と乗場扉側ホース142,154との接続を中継する中継部124,126とが加えられる。さらに、中継部124,126の中継を制御する中継ホース接続制御装置117と、中継部124,126での接続を監視する中継ホース接続センサ109,111と、清掃装置44の回転を制御する回転制御装置103とが追加される。なお、図2と共通である要素、例えば、開閉センサ104と、開閉制御装置106と、接続センサ148,149と、作動センサ146と、吸込機制御装置116と、接続制御装置118とは図示を省略している。
【0079】
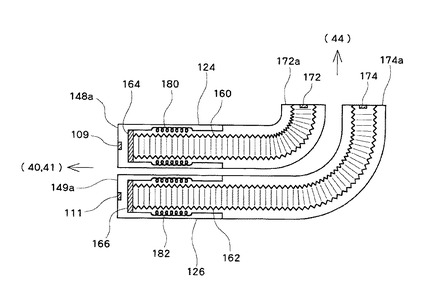
図9は、図8において示された中継部124,126の平面断面図である。中継部124,126は、乗場扉40,41側を向いた開口部148a、149aと、清掃装置44側を向いた開口部172a,174aと、内部に設けられる中継ホース160,162を備える。開口部148a,149aには、中継ホース接続センサ109,111を有し、開口部172a,174aには、回転状態センサ172,174とを有する。また、清掃装置44側を向いた開口部172a,174aの周辺は磁性体で構成される。
【0080】
中継ホース160,162は、伸縮自由な蛇腹状のホースであって、両端が開口している。また、その両端は、それぞれ清掃装置44と乗場扉40,41を向いている。また、中継ホース160,162は、中継部124,126の清掃装置44側を向いた開口部172a,174aに一端が固定され、他端は、自由端で、先端に電磁石164,166が配置されている。また、電磁石164,166の両端部から中継部124,126の中央部の内壁に跨って伸縮を復元方向に付勢しているバネ180,182が取付けられている。
なお、中継ホース160,162の一端は開口部172a,174aに固定されず、場合によっては、自由端で伸縮されてもよい。
【0081】
再び図8に戻り、回転制御装置103は、装置側制御部29のもとで、清掃装置44を乗場床面に垂直な軸の回りに回転させ、装置側ホース45,47の吸込口143,145の向く方向を、カゴ扉48,49に配置されたカゴ扉側ホース136,138と接続可能とするカゴ扉側回転位置と、乗場扉40,41に配置された乗場扉側ホース142,154と中継部124,126を介して接続可能とする乗場扉側回転位置との間で回転させる機能を有する。かかる回転制御装置103は、例えば、ステッピングモータとを含んで構成することができる。
【0082】
回転状態センサ172,174は、受光素子で構成され、清掃装置44を乗場床面に垂直な軸の回りに回転させ、乗場扉側回転位置に位置した時に受光する。具体的には、清掃装置44に配置される接続センサ148,149である一対の受発光素子のうちの発光素子から発光された光を受光することができる。また、ステッピングモータを用いる場合には、ステップ数によってカゴ扉側回転位置と乗場扉側回転位置を検出するものとしてもよい。中継ホース接続センサ109,111は、清掃装置44の接続センサ148,149と同じ機能と構成とを有する。
【0083】
主制御部25は、図2で説明した主制御CPU54において、通常モード制御モジュール51とカゴ敷居溝清掃モジュール群53に、さらに乗場敷居溝清掃モジュール群55が追加される。なお、入力部70、出力部72、開閉センサI/F74、開閉制御I/F76、通信制御66、記憶装置68については、変更がないので図示を省略している。
【0084】
乗場敷居溝清掃モジュール群55は、カゴ敷居溝清掃モードと乗場敷居溝清掃モードとの間のモード切替を行う清掃モード切替モジュール200と、清掃装置44の回転状態を判断する回転状態判断モジュール202と、中継ホース160,162と乗場扉側ホース142,154との接続状態を判断する中継ホース接続状態判断モジュール210とを含んで構成される。
【0085】
装置側制御部29は、図2で説明した装置側CPU86において、カゴ敷居溝清掃モジュール群85に、さらに乗場敷居溝清掃モジュール群87が追加される。なお、接続センサI/F94、作動センサI/F96、吸込機制御I/F98、接続制御I/F97、通信制御I/F90、記憶装置92については、変更がないので図示を省略している。
【0086】
乗場敷居溝清掃モジュール群87は、清掃装置44の回転を制御する回転制御モジュール204と中継ホース160,162と乗場扉側ホース142,154との接続を行う中継ホース接続モジュール206と、中継ホース160,162と乗場扉側ホース142,154との接続の開放を行う中継ホース開放モジュール208とを含んで構成される。
【0087】
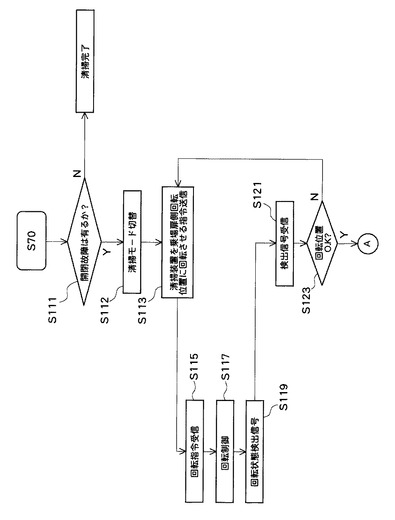
かかる構成の作用、特に、主制御部25を構成する主制御CPU54の各機能と、装置側制御部29を構成する装置側CPU86の各機能を図10のフローチャートを用いて以下に説明する。以下では図1から図9の符号を用いて説明する。また、乗場敷居溝128,130を清掃する手順は、カゴ敷居溝120,122を清掃する手順と重複する部分が多いため、相違点を中心に説明を行う。
【0088】
乗場扉側敷居溝清掃モードにおいても、主制御部25は、初期チェック指令送信(S2)からS70は同様に実行する。そして、S70の次に、開閉故障は有るか否かを判断する(S111)。具体的には、乗場扉40,41を開閉し、開閉できない場合は、開閉故障は有ると判断し、開閉できる場合は、開閉故障は無いと判断される。開閉故障が無いと判断される場合は、主制御部25は、管理センタ12に対し清掃完了信号を送信する。その後、清掃モードから通常モードに切り替えられる。
【0089】
開閉故障が有ると判断される場合は、主制御部25は、カゴ敷居溝清掃モードから乗場敷居溝清掃モードへとモード切替を行う(S112)。具体的には、主制御部側CPU54の清掃モード切替モジュール200の機能により実行される。
【0090】
そして、主制御部25は、装置側制御部29に対し、清掃装置44を乗場扉側回転位置に回転させる指令を送信する(S113)。次に、装置側制御部27は、回転指令を受信すると(S115)、それに従って、清掃装置44を乗場扉側回転位置に回転させる(S117)。具体的には、回転制御I/F71を介して回転制御装置103に指令を行い、回転制御装置103は、清掃装置44を回転させる。
【0091】
そして、装置側制御部29は、主制御部25に対し、回転状態検出信号を送信する(S119)。検出信号は、上記の例で清掃装置44が乗場扉側回転位置に位置され、吸込口143,145と開口部172a,174aとが向かい合っているか否かを確認するために行われる。上記の検出信号は、回転状態センサ172,174から出力される検出信号であり、かかる信号は、回転状態センサI/F114を介して装置側制御部29に送信され、さらに通信制御I/F90と通信制御I/F66を経由して主制御部25に送信される。
【0092】
主制御部25は、上記の回転状態検出信号を受信すると(S121)、清掃装置44の回転位置が、乗場扉側回転位置であるか否かが判断される(S123)。この工程は、主制御部側CPU54の回転状態判断モジュール202によって判断される。具体的には、上記の例で言えば、接続センサ148,149の発光素子から発光された光が、回転状態センサ172,174によって受光できる場合には、回転位置OKと判断し、受光できない場合には、回転位置NGと判断される。なお、ステッピングモータを用いる場合には、ステップ数によって位置を検出し、乗場扉側回転位置であるか否かを判断するものとしてもよい。
【0093】
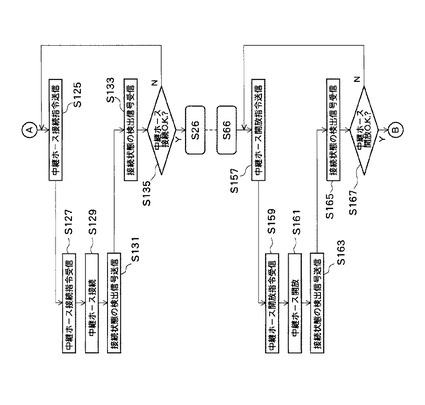
清掃装置44の回転位置がOKでない場合には、再びS113に戻る。清掃装置44の回転位置OKである場合には、主制御部25は、装置側制御部29に対し、中継ホース接続指令を送信する(S125)。
【0094】
装置側制御部29は、中継ホース接続指令を受信すると(S127)、これに従って中継ホース160,162と乗場扉側ホース142,154とを接続させる(S129)。この工程は、装置側CPU86の中継ホース接続モジュール206の機能によって実行される。具体的には、装置側制御部29からの中継ホース接続制御I/F110を介して中継ホース接続制御装置117に指令を行い、中継ホース接続制御装置117は、中継部124,126に備えられた中継ホース160,162の先端に取り付けられた電磁石164,166に通電を行う。したがって、中継ホース160,162の先端に配置された電磁石164,166と乗場扉側ホース142,154が配置された乗場扉40,41とは、磁力によって接続される。
【0095】
そして、装置側制御部29は、主制御部25に対し、乗場扉側ホース142,154と中継ホース160,162との接続状態の検出信号を送信する(S131)。検出信号は、上記の例で電磁石164,166に通電が行われ、これにより電磁石164,166が正常に作動し、電磁石164,166と乗場扉40,41とが接続されているか否かを確認するために行われるものである。上記の検出信号は、例えば、中継ホース接続センサ109,111から出力される検出信号であり、かかる信号は、中継ホース接続センサI/F113を介して装置側制御部29に送信され、さらに通信制御I/F90と通信制御I/F66を経由して主制御部25に送信される。
【0096】
主制御部25は、装置側制御部29からの中継ホース接続状態の検出信号を受信する(S133)と、中継ホース160,162と乗場側ホース142,154との接続状態が判断される(S135)。この工程は、主制御CPU54の中継ホース接続状態判断モジュール210の機能により実行される。具体的には、例えば、上記の例で言えば、一対の受発光素子である中継ホース接続センサ109,111から出力される検出信号を受信し、光が遮断されていることを示す信号であれば、接続OKと判断し、光が遮断されていないことを示す信号であれば、接続NGと判断される。
【0097】
中継ホース160,162と乗場扉側ホース142,154との接続がOKでない場合には、再びS125に戻る。中継ホース160,162と乗場扉側ホース142,154との接続がOKである場合には、カゴ敷居溝120,122の清掃と同様に図7で説明したホース接続指令送信(S26)からホースの接続開放がOKか否かの判断(S66)までの処理手順が事項される。ここで、図7においては、ホースの接続又は開放の対象は、カゴ扉側ホース136,138と装置側ホース45,47との接続又は開放であるが、図10においては、中継ホース160,162と装置側ホース45,47との接続又は開放と、その接続又は開放の対象が変更されて実行される。
【0098】
次に、ホースの接続開放がOKか否かの判断(S66)が実行された後の処理手順について説明する。主制御部25は、装置側制御部29に対し、中継ホース開放指令を送信する(S157)。
【0099】
装置側制御部29は、中継ホース開放指令を受信すると(S159)、これに従って中継ホース160,162と乗場扉側ホース142,154との接続を開放させる(S161)。この工程は、装置側CPU86の中継ホース接続モジュール206の機能によって実行される。具体的には、装置側制御部29からの中継ホース接続制御I/F110を介して中継ホース接続制御装置117に指令を行い、中継ホース接続制御装置117は、中継部124,126に備えられた中継ホース160,162の先端に取り付けられた電磁石164,166に通電を停止し、磁力が失われることにより、中継ホース160,162の先端に配置された電磁石164,166と乗場扉側ホース142,154が配置された乗場扉40,41との接続は開放される。さらに、中継ホース160,162は、バネ180,182の復元力によって所定の位置に戻る。
【0100】
そして、装置側制御部29は、主制御部25に対し、乗場扉側ホース142,154と中継ホース160,162との接続状態の検出信号を送信する(S163)。検出信号は、上記の例で電磁石164,166に通電が停止され、電磁石164,166と乗場扉40,41との接続が開放されているか否かを確認するために行われるものである。上記の検出信号は、中継ホース接続センサ109,111から出力される検出信号であり、かかる信号は、中継ホース接続センサI/F113を介して装置側制御部29に送信され、さらに通信制御I/F90と通信制御I/F66を経由して主制御部25に送信される。
【0101】
主制御部25は、装置側制御部29からの中継ホース接続状態の検出信号を受信する(S165)と、中継ホース160,162と乗場側ホース142,154との接続状態が判断される(S167)。この工程は、主制御CPU54の中継ホース接続状態判断モジュール210の機能により実行される。具体的には、上記の例で言えば、一対の受発光素子である中継ホース接続センサ109,111から出力される検出信号を受信し、光が遮断されていないを示す信号であれば、接続の開放はOKと判断し、光が遮断されていることを示す信号であれば、接続の開放はNGと判断される。
【0102】
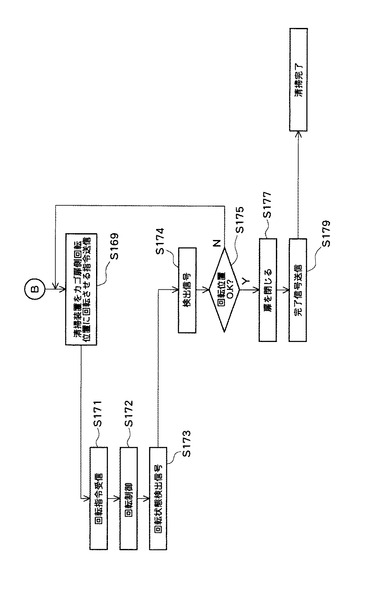
中継ホース160,162と乗場側ホース142,154との接続開放がOKで無い場合は、再びS157を実行する。中継ホース160,162と乗場側ホース142,154との接続開放がOKの場合は、主制御部25は、装置側制御部29に対し、清掃装置44をカゴ扉側回転位置に回転させる指令を送信する(S169)。次に、装置側制御部29は、回転指令を受信すると(S171)、それに従って、清掃装置44をカゴ扉側回転位置に回転させる(S172)。具体的には、回転制御I/F71を介して回転制御装置103に指令を行い、回転制御装置103は、清掃装置44を回転させる。
【0103】
そして、装置側制御部29は、主制御部25に対し、回転状態検出信号を送信する(S173)。検出信号は、上記の例で清掃装置44がカゴ扉側回転位置に位置され、吸込口143,145とカゴ装置側口105,107とが向かい合っているか否かを確認するために行われる。上記の検出信号は、例えば、回転状態センサ172,174から出力される検出信号であり、かかる信号は、回転状態センサI/F114を介して装置側制御部29に送信され、さらに通信制御I/F90と通信制御I/F66を経由して主制御部25に送信される。
【0104】
主制御部25は、上記の回転状態検出信号を受信すると(S174)、清掃装置44の回転位置が、カゴ扉側回転位置であるか否かが判断される(S175)。この工程は、主制御CPU54の回転状態判断モジュール202によって判断される。具体的には、例えば、上記の例で言えば、接続センサ148,149の発光素子から発光された光が、回転状態センサ172,174によって受光できない場合には、回転位置OKと判断し、受光できる場合には、回転位置NGと判断される。なお、ステッピングモータを用いる場合には、ステップ数によって位置を検出し、カゴ扉側回転位置であるか否かを判断するものとしてもよい。
【0105】
清掃装置44の回転位置がOKでない場合には、再びS169に戻る。清掃装置44の回転位置OKである場合には、乗場扉を閉じる(S177)。次に、管理センタ12に対し、清掃完了信号を送信する。そして、清掃モードから通常モードへと変更される。このように、乗りカゴに配置された清掃装置を回転させることにより、乗りカゴに配置された清掃装置を用いて、乗場敷居溝128,130を清掃することできる。
【0106】
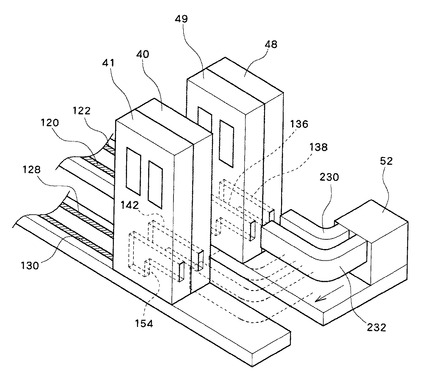
次に、他の実施の形態について説明する。上記のように、乗場敷居溝128,130を清掃する場合、乗りカゴに配置された清掃装置44の位置を回転することにより清掃することができるが、図11に示される清掃装置52を用いても清掃することができる。
【0107】
図11は、図8に示された乗りカゴ部108において、中継部124,126と清掃装置44の要素を清掃装置52に置き換えたものである。
【0108】
清掃装置52は、図2、図8において説明した清掃装置44とほぼ同様の構成を有し、その相違は、装置側ホースが内部に配置されるホースケース230,232の形状が異なることである。ホースケース230,232の形状は、吸込機等を格納した筐体の側面に垂直な方向に突出しているが、途中でカゴ扉48,49を向いている。さらに、清掃装置52は、ホースケース230,232の先端がカゴ扉48,49のカゴ装置側口105,107と向かい合う位置に配置されている。
【0109】
この清掃装置52は、カゴ敷居溝120,122を清掃する位置に配置されているが、これを乗場扉40,41側にスライドすることにより、ホースケース230,232の先端が乗場扉40,41の乗場装置側口152,157と向かい合う位置に配置することができる。ここで、ホースケース230,232は実線で描かれた場合は、カゴ敷居溝120,122を清掃する場合を示し、破線で描かれた場合には、乗場敷居溝128,130を清掃する場合を示している。
【0110】
このように、清掃装置52を乗りカゴ42の床面に平行な方向で乗場扉40,41側に移動させることにより、カゴ敷居溝120,122も乗場敷居溝128,130も清掃することができる。
【図面の簡単な説明】
【0111】
【図1】本発明に係る実施の形態のエレベータの敷居溝清掃システムが適用されるエレベータ全体を示す図である。
【図2】本発明に係る実施の形態のエレベータの敷居溝清掃システムを示す図である。
【図3】本発明に係る実施の形態における乗場周辺を示す図である。
【図4】図3におけるA−A断面図である。
【図5】本発明に係る実施の形態における乗りカゴ周辺を示す図である。
【図6】本発明に係る実施の形態における清掃装置の側面図、及び図4におけるB−B断面図である。
【図7(a)】本発明に係る実施の形態におけるエレベータの敷居溝清掃システムのフローチャートを示す図である。
【図7(b)】本発明に係る実施の形態におけるエレベータの敷居溝清掃システムのフローチャートを示す図である。
【図7(c)】本発明に係る実施の形態におけるエレベータの敷居溝清掃システムのフローチャートを示す図である。
【図8】他の実施の形態のエレベータの敷居溝清掃システムを示す図である。
【図9】他の実施の形態における中継部の断面図を示す図である。
【図10(a)】他の実施の形態におけるエレベータの敷居溝清掃システムのフローチャートを示す図である。
【図10(b)】他の実施の形態におけるエレベータの敷居溝清掃システムのフローチャートを示す図である。
【図10(c)】他の実施の形態におけるエレベータの敷居溝清掃システムのフローチャートを示す図である。
【図11】さらに他の実施の形態のエレベータの敷居溝清掃システムを示す図である。
【符号の説明】
【0112】
10,11 エレベータの敷居溝清掃システム、12 管理センタ、16 インタネット、20 機械室、22 巻上機、24,25 主制御部、27,29 装置側制御部、30 主ロープ、28,32 通信ケーブル、36 乗場、37 カゴ壁、39 カゴ室、40,41 乗場扉、38,43,180,182 バネ、42 乗りカゴ、44、52 清掃装置、45,47 装置側ホース、46 乗客、48,49 カゴ扉、50 昇降路、51 通常モード制御モジュール、53,85 カゴ敷居溝清掃モジュール群、54、主制御CPU、55,87 乗場敷居溝清掃モジュール群、56 チェック信号受信モジュール、58 呼び有無判断モジュール、60 開閉判断モジュール、62 接続状態判断モジュール、64 作動状態判断モジュール、66,90 通信制御I/F、68,92 記憶装置、70 入力部、71 回転制御I/F、72 出力部、74 開閉センサI/F、76 開閉制御I/F、78 ホース接続モジュール、80 ホース開放モジュール、82 吸込機作動モジュール、84 吸込機停止モジュール、86 装置側CPU、94 接続センサI/F、96 作動センサI/F、97 接続制御I/F、98 吸込機制御I/F、100,101 カゴ溝側口、102 乗りカゴ部、103 回転制御装置、104 開閉センサ、105,107 カゴ装置側口、108 乗りカゴ部、106 開閉駆動装置、109,111、 中継ホース接続センサ、110 中継ホース接続制御I/F、112 作動センサ、113 中継ホース接続センサI/F、114 回転状態センサI/F、116 吸込機制御装置、117 中継ホース接続制御装置、118 接続制御装置、120,122 カゴ敷居溝、124,126 中継部、128,130 乗場敷居溝、132 乗場壁、134 乗場ボタン、136,138 カゴ扉側ホース、141 ゴミ保管部、142,154 乗場側ホース、143,145 吸込口、144 吸込機、146 作動センサ、148a,149a 開口部、148,149 接続センサ、150,151,164,166 電磁石、152,157, 乗場装置側口、153 蓋部、160,162 中継ホース、172,174 回転状態センサ、172a,174a 開口部、200 清掃モード切替モジュール、202 回転状態判断モジュール、204 回転制御モジュール、206 中継ホース接続モジュール、208 中継ホース開放モジュール、210 中継ホース接続状態判断モジュール、230,232 ホースケース。
【技術分野】
【0001】
本発明は、エレベータの敷居溝清掃システム、主制御部用敷居溝清掃プログラム、装置側制御部用敷居溝清掃プログラム、及びエレベータの敷居溝清掃方法に係り、特に、エレベータの敷居溝を清掃するためのエレベータの敷居溝清掃システム、主制御部用敷居溝清掃プログラム、装置側制御部用敷居溝清掃プログラム、及びエレベータの敷居溝清掃方法に関するものである。
【背景技術】
【0002】
従来のエレベータ装置では、敷居溝に小石やガラス、ごみ等の異物が溜まり、かかる異物がエレベータ装置の戸または扉と敷居溝との間に挟まった場合に、扉の開閉故障が発生することがある。そのような故障が発生した場合には、エレベータ装置の保守作業員が呼び出され、例えば、手作業で異物を取り除く等の手間が発生する。
【0003】
そこで、特許文献1には、エレベータ用敷居溝清掃装置において、エレベータ装置の扉の扉開閉方向両端下部のそれぞれにブラシとピンを備え、扉が開方向に移動するにつれて、ブラシやピンの弾性力によって異物を移動し、敷居溝の底面に設けられた排除穴に落として取り除くことが述べられている。
【0004】
【特許文献1】特開2007−62903号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
上記のように、特許文献1の構成を用いることで、エレベータの敷居溝が清掃できる。しかし、ブラシ、ピンを用いて敷居溝を機械的に移動させるだけでは、十分に敷居溝内の異物を除去できないことがある。なお、エレベータの敷居溝としては、カゴの扉のためのカゴ敷居溝と、乗場の扉のための乗場敷居溝とがある。
【0006】
本発明の目的は、エレベータの敷居溝を十分に清掃できるエレベータの敷居溝清掃システムを提供することである。
【課題を解決するための手段】
【0007】
本発明に係るエレベータの敷居溝清掃システムは、開閉機構により開閉されるカゴ扉と、カゴ扉の開閉移動を案内するカゴ敷居溝と、一端にカゴ溝側口を有し他端にカゴ装置側口を有するカゴ扉側ホースと、を含む乗りカゴと、吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、カゴ装置側口と吸込口との間を接続し又は開放する手段と、カゴ扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、清掃装置を制御する装置側制御部と、装置側制御部と通信経路を介して接続され、カゴ扉の開閉制御を含みエレベータ全体を制御する主制御部と、を備え、主制御部は、カゴ扉を全開状態とし、そこで停止させる手段と、カゴ扉の開閉状態を判断し、カゴ扉が全開状態で停止されている場合に、装置側制御部に対し、カゴ扉側ホースと装置側ホースとを接続させる接続指令を送信する手段と、装置側制御部から、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらが接続されている場合に、装置側制御部に対し、吸込機作動指令を送信する手段と、装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が作動している場合に、カゴ扉を所定回数開閉し、それに伴いカゴ扉側ホースのカゴ溝側口をカゴ敷居溝に沿って往復移動させる手段と、装置側制御部に対し、吸込機停止指令を送信する手段と、装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が停止している場合に、装置側制御部に対し、カゴ扉側ホースと装置側ホースとの接続を開放させる開放指令を送信する手段と、装置側制御部から、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらの接続が開放されている場合に、カゴ扉を閉じる手段と、を含むことを特徴とする。
【0008】
本発明に係るエレベータの敷居溝清掃システムは、開閉機構により開閉されるカゴ扉と、カゴ扉の開閉移動を案内するカゴ敷居溝と、一端にカゴ溝側口を有し他端にカゴ装置側口を有するカゴ扉側ホースと、を含む乗りカゴと、吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、カゴ装置側口と吸込口との間を接続し又は開放する手段と、カゴ扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、清掃装置を制御する装置側制御部と、装置側制御部と通信経路を介して接続され、カゴ扉の開閉制御を含みエレベータ全体を制御する主制御部と、を備え、装置側制御部は、主制御部から、カゴ扉側ホースと装置側ホースとを接続させる接続指令を受信し、これに従ってカゴ扉側ホースと装置側ホースとを接続させ、主制御部に対し、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を送信する手段と、主制御部から、吸込機作動指令を受信し、これに従って吸引機を作動させ、主制御部に対し、吸込機の作動状態の検出信号を送信する手段と、主制御部から、カゴ扉側ホースと装置側ホースとの接続を開放させる開放指令を受信し、カゴ扉側ホースと装置側ホースとの接続を開放させ、主制御部に対し、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を送信する手段と、を備えることを特徴とする。
【0009】
また、本発明に係るエレベータの敷居溝清掃システムにおいて、カゴ扉側ホースと装置側ホースの少なくともいずれか一方が伸縮可能であることが好ましい。
【0010】
また、清掃装置は、乗りカゴに設けられることが好ましい。
【0011】
また、本発明に係るエレベータの敷居溝清掃システムにおいて、カゴ扉側ホースと装置側ホースとを接続し又は開放する手段は、電磁石を用いるものであって、カゴ扉側ホースと装置側ホースとを接続するときの電磁石通電方向と、カゴ扉側ホースと装置側ホースとの接続を開放するときの電磁石通電方向とは、互いに逆の通電方向であることが好ましい。
【0012】
また、主制御部は、外部の管理センタとネットワークで接続され、管理センタからの清掃指令を受信し、これにしたがってエレベータの敷居溝清掃システムを作動させることが好ましい。
【0013】
本発明に係るエレベータの敷居溝清掃システムは、開閉機構により開閉される乗場扉と、乗場扉の開閉移動を案内する乗場敷居溝と、一端に乗場溝側口を有し他端に乗場装置側口を有する乗場扉側ホースと、を含む乗場部と、吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、乗場装置側口と吸込口との間を接続し又は開放する手段と、乗場扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、清掃装置を制御する装置側制御部と、装置側制御部と通信経路を介して接続され、乗場扉の開閉制御を含みエレベータ全体を制御する主制御部と、を備え、主制御部は、乗場扉を全開状態とし、そこで停止させる手段と、乗場扉の開閉状態を判断し、乗場扉が全開状態で停止されている場合に、乗場扉側ホースと装置側ホースとを接続させる接続指令を送信する手段と、装置側制御部から、乗場扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらが接続されている場合に、装置側制御部に対し、吸込機作動指令を送信する手段と、装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が作動している場合に、乗場扉を所定回数開閉し、それに伴い乗場扉側ホースの乗場溝側口を乗場敷居溝に沿って往復移動させる手段と、装置側制御部に対し、吸込機停止指令を送信する手段と、装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が停止している場合に、装置側制御部に対し、乗場扉側ホースと装置側ホースとの間を開放させる開放指令を送信する手段と、装置側制御部から、乗場扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらの接続が開放されている場合に、乗場扉を閉じる手段と、を含むことを特徴とする。
【0014】
本発明に係るエレベータの敷居溝清掃システムは、開閉機構により開閉される乗場扉と、乗場扉の開閉移動を案内する乗場敷居溝と、一端に乗場溝側口を有し他端に乗場装置側口を有する乗場扉側ホースと、を含む乗場部と、吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、乗場装置側口と吸込口との間を接続し又は開放する手段と、乗場扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、清掃装置を制御する装置側制御部と、装置側制御部と通信経路を介して接続され、乗場扉の開閉制御を含みエレベータ全体を制御する主制御部と、を備え、装置側制御部は、主制御部から、乗場扉側ホースと装置側ホースとを接続させる接続指令を受信し、これに従って乗場扉側ホースと装置側ホースとを接続させ、主制御部に対し、乗場扉側ホースと装置側ホースとの接続状態の検出信号を送信する手段と、主制御部から、吸込機作動指令を受信し、これに従って吸引機を作動させ、主制御部に対し、吸込機の作動状態の検出信号を送信する手段と、主制御部から、吸込機停止指令を受信し、これに従って吸引機を停止させ、主制御部に対し、吸込機の作動状態の検出信号を送信する手段と、主制御部から、乗場扉側ホースと装置側ホースとの接続を開放させる開放指令を受信し、乗場扉側ホースと装置側ホースとの接続を開放させ、主制御部に対し、乗場扉側ホースと装置側ホースとの接続状態の検出信号を送信する手段と、を備えることを特徴とする。
【0015】
また、清掃装置は、乗りカゴに設けられることが好ましい。
【0016】
また、清掃装置は、さらに清掃装置を回転させる回転駆動機構を備え、回転駆動機構は、管理センタからの清掃指令が、カゴ敷居溝清掃指令か乗場敷居溝清掃指令かに応じて、清掃装置の吸込口をカゴ装置側口に接続できる位置と清掃装置の吸込口を乗場装置側口に接続できる位置との間で清掃装置を回転させることが好ましい。
【0017】
また、清掃装置は、さらに清掃装置を移動させる移動機構を備え、移動機構は、管理センタからの清掃指令が、カゴ敷居溝清掃指令か乗場敷居溝清掃指令かに応じ、乗りカゴの床面に平行な方向であって乗場扉側に清掃装置を移動させることが好ましい。
【0018】
本発明に係る主制御部用敷居溝清掃プログラムは、開閉機構により開閉されるカゴ扉と、カゴ扉の開閉移動を案内するカゴ敷居溝と、一端にカゴ溝側口を有し他端にカゴ装置側口を有するカゴ扉側ホースと、を含む乗りカゴと、吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、カゴ装置側口と吸込口との間を接続し又は開放する手段と、カゴ扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、清掃装置を制御する装置側制御部と、装置側制御部と通信経路を介して接続され、カゴ扉の開閉制御を含みエレベータ全体を制御する主制御部と、を備えるエレベータの敷居溝清掃システムの主制御部上で実行される主制御部用敷居溝清掃プログラムであって、カゴ扉を全開状態とし、そこで停止させる処理手順と、カゴ扉の開閉状態を判断し、カゴ扉が全開状態で停止されている場合に、装置側制御部に対し、カゴ扉側ホースと装置側ホースとを接続させる接続指令を送信する処理手順と、装置側制御部から、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらが接続されている場合に、装置側制御部に対し、吸込機作動指令を送信する処理手順と、装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が作動している場合に、カゴ扉を所定回数開閉し、それに伴いカゴ扉側ホースのカゴ溝側口をカゴ敷居溝に沿って往復移動させる処理手順と、装置側制御部に対し、吸込機停止指令を送信する処理手順と、装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が停止している場合に、装置側制御部に対し、カゴ扉側ホースと装置側ホースとの接続を開放させる開放指令を送信する処理手順と、装置側制御部から、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらの接続が開放されている場合に、カゴ扉を閉じる処理手順と、が実行されることを特徴とする。
【0019】
本発明に係る装置側制御部用敷居溝清掃プログラムは、開閉機構により開閉されるカゴ扉と、カゴ扉の開閉移動を案内するカゴ敷居溝と、一端にカゴ溝側口を有し他端にカゴ装置側口を有するカゴ扉側ホースと、を含む乗りカゴと、吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、カゴ装置側口と吸込口との間を接続し又は開放する手段と、カゴ扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、清掃装置を制御する装置側制御部と、装置側制御部と通信経路を介して接続され、カゴ扉の開閉制御を含みエレベータ全体を制御する主制御部と、を備えるエレベータの敷居溝清掃システムの装置側制御部上で実行される装置側制御部用敷居溝清掃プログラムであって、主制御部から、カゴ扉側ホースと装置側ホースとを接続させる接続指令を受信し、これに従ってカゴ扉側ホースと装置側ホースとを接続させ、主制御部に対し、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を送信する処理手順と、主制御部から、吸込機作動指令を受信し、これに従って吸引機を作動させ、主制御部に対し、吸込機の作動状態の検出信号を送信する処理手順と、主制御部から、吸込機停止指令を受信し、これに従って吸引機を停止させ、主制御部に対し、吸込機の作動状態の検出信号を送信する処理手順と、主制御部から、カゴ扉側ホースと装置側ホースとの接続を開放させる開放指令を受信し、カゴ扉側ホースと装置側ホースとの接続を開放させ、主制御部に対し、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を送信する処理手順と、が実行されることを特徴とする。
【0020】
本発明に係るエレベータの敷居溝清掃方法は、エレベータの乗りカゴのカゴ扉を案内する敷居溝を清掃するエレベータの敷居溝清掃方法であって、カゴ扉を全開状態とし、そこで停止させる工程と、乗りカゴに設けられ一端にカゴ溝側口を有し他端にカゴ装置側口を有するカゴ扉側ホースと吸込口が配置され吸込機に設けられる装置側ホースとを接続させる工程と、吸込機を作動させる工程と、カゴ扉を所定回数開閉し、それに伴いカゴ扉側ホースのカゴ溝側口をカゴ敷居溝に沿って往復移動させる工程と、カゴ扉を閉じる工程とを含むことを特徴とする。
【発明の効果】
【0021】
上記構成の少なくとも1つにより、主制御部は、カゴ扉を所定回数開閉し、それに伴いカゴ扉側ホースのカゴ溝側口をカゴ敷居溝に沿って往復移動させ、カゴ扉側ホースに接続された吸込機の吸込力により清掃を行う。したがって、十分にカゴ敷居溝を清掃することができる。
【0022】
また、上記構成の少なくとも1つにより、主制御部は、乗場扉を所定回数開閉し、それに伴い乗場扉側ホースの乗場溝側口を乗場敷居溝に沿って往復移動させ、乗場扉側ホースに接続された吸込機の吸込力により清掃を行う。したがって、十分に乗場敷居溝を清掃することができる。
【0023】
また、上記構成の少なくとも1つにより、カゴ敷居溝と乗場敷居溝が清掃できるので、扉の開閉故障を抑制することができる。したがって、エレベータ装置の保守作業員が呼び出されることを抑制することができる。
【発明を実施するための最良の形態】
【0024】
以下に、図面を用いて本発明に係る実施の形態につき、詳細に説明する。なお、以下では、カゴ扉、乗場扉については、片側から開閉されるいわゆる片開き扉について説明を行うが、両側から開閉されるいわゆる両開き扉であってもよい。また、以下ではカゴ扉、乗場扉については、それぞれ2枚の扉から構成される場合について説明するが、1枚の扉から構成される場合であってもよい。また、以下では、主制御部は、エレベータが設置されるビル等の最上階の機械室に配置される場合として説明するが、機械室を特別に設けずにエレベータの昇降路の最下部であるいわゆるピット等に配置されるいわゆる機械室レスエレベータであってもよい。また、以下では、管理センタは外部に設置されている場合として説明するが、同一のビル内に設置されている場合であってもよい。また、以下では、ネットワークとしてインタネットを例として説明するが、LAN等のネットワークを用いてもよい。また、以下では、清掃装置は乗りカゴに設けられているものとして説明するが、乗場側に設けるものも同様に実施できる。また、以下では、カゴ溝側口と乗場溝側口については1箇所設けられていることとして説明しているが、2箇所以上のカゴ溝側口と乗場溝側口であってもよい。
【0025】
図1は、エレベータの敷居溝清掃システム10を示す図である。エレベータの敷居溝清掃システム10は、昇降路50内を移動する乗りカゴ42と、乗りカゴ42を昇降させるための主ロープ30と、主ロープ30を駆動し乗りカゴ42を昇降させる機能を有する巻上機22と、乗客46が乗りカゴ42に乗り降りする乗場36と、エレベータの敷居溝清掃システム10の作動を含み、エレベータの作動を全体として制御する主制御部24と、カゴ敷居溝あるいは乗場敷居溝を清掃する清掃装置44と、清掃装置44を制御する装置側制御部27と、カゴ扉48,49及び乗場扉40,41の開閉駆動を行う開閉駆動装置106とを含んで構成される。
【0026】
巻上機22と主制御部24は、ビルの最上階に設置される機械室20の内部に配置される。また、管理センタ12と主制御部24は、例えばインタネット16を介して相互に接続される。また、主制御部24と開閉駆動装置106との間、主制御部24と装置側制御部27との間は、それぞれ通信ケーブル32、28を介して接続される。
【0027】
図2は、エレベータの敷居溝清掃システム10を示す図である。なお、以下では図1の要素と同一の要素については、同一の符号を用いて説明する。エレベータの敷居溝清掃システム10は、カゴ扉48,49と清掃装置44等を有する乗りカゴ部102と、上記に示された管理センタ12と、主制御部24と装置側制御部27とを含んで構成される。まず、乗りカゴ部102の詳細について説明し、次に、管理センタ12、主制御部24、装置側制御部27の詳細を説明する。
【0028】
図3から図7に乗りカゴ部102の詳細を示す。なお、以下では図1、図2の要素と同様の要素については、同一の符号を付し、詳細な説明は省略する。また、以下では図1、図2の符号を用いて説明する。図3は、乗場36周辺を示す図である。乗場36周辺は、乗場36と昇降路50とを区画する乗場壁132と、乗りカゴ42を呼ぶための乗場ボタン134と、乗場側に設けられる乗場扉40,41とを含んで構成される。
【0029】
図4は、図3におけるA−A断面図であり、乗りカゴ42と乗場36を上面から見た図である。乗りカゴ42は、カゴ室39と、カゴ扉48,49を案内するカゴ敷居溝120,122と、カゴ敷居溝120,122の長手方向の一端の延長線上に配置される2つの装置側ホース45,47を有する清掃装置44と、カゴ扉48,49及び乗場扉40,41の開閉を行う開閉制御装置106と、図示されていない開閉センサとを含んで構成される。乗場36は、乗場扉40,41を案内する乗場敷居溝128,130と、図示されていない開閉センサを含んで構成される。
【0030】
カゴ室39は、適当な人数の乗客が乗ることができる程度の広さを有し、その周辺はカゴ壁37で覆われており、乗客が乗降できる開口部すなわち乗りカゴ側の出入口を有している。かかる開口部は、カゴ扉48,49がカゴ敷居溝120,122により案内されることにより開閉される。また、乗場36の乗場壁132についても、乗りカゴ42の開口部に対向する部分に対応する開口部、すなわち乗場側の出入口が設けられている。この開口部は、乗場扉40,41が乗場敷居溝128,130により案内されることにより開閉される。
【0031】
図5は、図4において示されるカゴ扉48,49と、カゴ敷居溝120,122と、清掃装置44の部分を抜き出して詳細に説明する図である。カゴ扉48,49は、カゴ扉48,49を案内するカゴ敷居溝120,122上に垂直方向に配置されている。カゴ扉48,49は、それぞれの内部にカゴ扉側ホース136,138が配置される。カゴ扉側ホース136,138は、一端に、カゴ敷居溝120,122側に向いたカゴ溝側口100,101と他端に、清掃装置44側を向いたカゴ装置側口105,107とを有している。なお、カゴ扉48,49のうち、カゴ装置側口105,107の周辺は磁性体で構成されている。清掃装置44は、カゴ敷居溝120,122の延長上の乗りカゴ床上に配置されている。また、清掃装置44は、内部に装置側ホース45,47を有している。装置側ホース45,47は、カゴ装置側口105,107に向かって突き出た吸込口143,145を有している。
【0032】
図6は、清掃装置44の詳細図で、図6(a)は側面図、図6(b)は、図4において示される清掃装置44のB−B断面図である。清掃装置44は、吸込モータを含んで構成される吸込機144と、吸込口143,145を有し、軸方向に自由に伸縮できる装置側ホース45,47と、吸込機144により吸い込んだゴミを保管するゴミ保管部141と、吸い込んだゴミの逆流を防止する蓋部153と、吸込機144の作動状態を検出する作動センサ146と、カゴ扉側ホース136,138と装置側ホース45,47との間の接続状態を検出する接続センサ148,149と吸込機制御装置116と接続制御装置118とを含んで構成される。また、装置側ホース45,47の先端には、電磁石150,151が配置されている。吸込機制御装置116は、吸込機制御I/F98を介して得られた指令により、吸込機144を通電する。接続制御装置118は、電磁石150,151に通電する機能を有する。
【0033】
装置側ホース45,47は、蛇腹状のホースであって、その先端に取り付けられた電磁石150,151から他端が取付けられた壁に跨ってホースの伸縮を復元方向に付勢しているバネ38,43が取り付けられている。
【0034】
電磁石150,151は、磁性材料の芯の周りに、コイルを巻き、通電することによって磁力を発生させる磁石であり、接続制御装置118からの通電により、その磁力によって、電磁石150,151とカゴ扉48,49、すなわちカゴ扉側ホース136,138と装置側ホース45,47とは接続される。したがって、この状態のままカゴ扉48,49が移動すれば、装置側ホース45,47は伸長することとなる。一方、電磁石150,151への通電を停止すれば、電磁石150,151は、磁力を失うことから、カゴ扉48,49との接続は開放される。したがって、装置側ホース45,47はバネ38,43の付勢力で縮小し、元通りの形状になる。
【0035】
なお、電磁石150,151とカゴ扉48,49、すなわちカゴ扉側ホース136,138と装置側ホース45,47との接続開放については、上記の通電とは逆方向に通電を行い、電磁石150,151の反発力によって、接続を強制的に開放してもよい。
【0036】
接続センサ148,149は、一対の発光素子と受光素子とで構成される受発光素子で、発光素子と受光素子との間に装置側ホース45,47がある場合には発光素子の光が受光素子に伝達せず、発光素子と受光素子との間に装置側ホース45,47がない場合には発光素子の光が受光素子に伝達する。
【0037】
再び図2に戻って、外部に設置される管理センタ12は、エレベータの作動を監視する機能を有し、主制御部24とはインタネット16を介して接続される。ここでは、図2の場合において、管理センタ12から主制御部24に対して清掃モード等の指令等を送信する。
【0038】
主制御部24は、エレベータの速度制御、運行管理制御、その他必要な制御を行う機能を有する。主制御部24は、主制御CPU54と、制御入力ボタン等の入力部70と、点灯ランプ、ディスプレイ等の出力部72と、プログラム等を記憶する記憶装置68と、乗りカゴ部102内に配置された開閉制御装置106との間で通信を行う開閉制御I/F76と、乗りカゴ部102内に配置された開閉センサ104との間で通信を行う開閉センサI/F74と、管理センタ12とインタネット16を介して通信を行い、また、装置側制御部27と装置側制御部27に配置される通信制御I/F90を介して通信を行うための通信制御I/F66とを含んで構成される。
【0039】
かかる主制御部24は、エレベータの制御に適したコンピュータを用いることができる。また、駆動回路等と論理回路等の複数の電気回路を組み合わせて構成するものを用いてもよい。
【0040】
主制御CPU54は、カゴ敷居溝清掃モジュール群53と通常モード制御モジュールとを含んで構成される。カゴ敷居溝清掃モジュール群53は、カゴ扉48,49の開閉状態を判断する開閉判断モジュール60と、カゴ扉側ホース136,138と装置側ホース45,47との接続状態を判断する接続状態判断モジュール62と、吸込機の作動状態を判断する作動状態判断モジュール64と、管理センタ12から清掃指令を受け取るチェック信号受信モジュール56と、乗りカゴの呼びの有無を判断する呼び有無判断モジュール58とを含んで構成される。
【0041】
装置側制御部27は、清掃装置44を制御する機能を有する。装置側制御部27は、装置側CPU86と、プログラム等を記憶する記憶装置92と、主制御部24との通信を行う通信制御I/F90と、乗りカゴ部102内に配置された接続センサ148,149との間で通信を行う接続センサI/F94と、乗りカゴ部102内に配置された作動センサ112との間で通信を行う作動センサI/F96と、乗りカゴ部102内に配置された吸込機制御装置116との間で通信を行う吸込機制御I/F98と乗りカゴ部102内に配置された接続制御装置118との間で通信を行う接続制御I/F97とを含んで構成される。
【0042】
かかる装置側制御部27は、エレベータの制御に適したコンピュータを用いることができる。また、駆動回路等と論理回路等の複数の電気回路を組み合わせて構成するものを用いてもよい。
【0043】
装置側CPU86は、カゴ敷居溝清掃モジュール群85から構成され、カゴ敷居溝清掃モジュール群は、カゴ扉側ホース136,138と装置側ホース45,47とを接続するホース接続モジュール78と、カゴ扉側ホース136,138と装置側ホース45,47との接続を開放するホース開放モジュール80と、清掃装置44に配置された吸込機144を作動させる吸込機作動モジュール82と、清掃装置44に配置された吸込機144を停止させる吸込機停止モジュール84とを含んで構成される。
【0044】
これらの各機能は、ソフトウェアを実行することで実現でき、具体的には、対応する主制御部用敷居溝清掃プログラムと装置側制御部用敷居溝清掃プログラムとを実行することで実現できる。またかかる機能の一部あるいは全部をハードウェアで実現するものとしてもよい。
【0045】
かかる構成の作用、特に、主制御部24を構成する主制御CPU54の各機能と、装置側制御部27を構成する装置側CPU86の各機能を、図7のフローチャートを用いて以下に説明する。また、図7のフローチャートは、エレベータのカゴ敷居溝を清掃する各手順を示す図で、その各手順は、主制御部用敷居溝清掃プログラムと装置側制御部用敷居溝清掃プログラムの各処理手順にそれぞれ対応する。以下では図1から図6の要素と同様の要素については、同一の符号を付し、詳細な説明は省略する。
【0046】
通常時においては、主制御部24上で、エレベータの作動を全体として制御するエレベータ制御プログラムが実行されて、乗りカゴ42の昇降等のエレベータ全体のシステムが稼動している。
【0047】
エレベータのカゴ敷居溝を清掃する必要が生じると、管理センタ12から主制御部24に対しカゴ敷居溝清掃モード指令が送信される(S2)。
【0048】
主制御部24は、カゴ敷居溝清掃モード指令を受け取ると、通常モードから清掃モードに切り替える。ここでは、カゴ敷居溝清掃モードへとプログラムを切り替える。カゴ敷居溝清掃モードに切り替わると、主制御部24上では、主制御部用敷居溝清掃プログラムが実行される。
【0049】
カゴ敷居溝清掃モードに切り替わると、主制御部24は、装置側制御部27に対し、初期チェックを行う指令を送信する(S4)。初期チェック指令は、装置側制御部27を介して乗りカゴ部102を初期化し、システムを起動するためのものである。
【0050】
そこで、装置側制御部27は、初期チェック指令を受信する(S6)と、装置側制御部27は、初期化を行いその結果を示す初期チェック信号を主制御部24に対して送信する(S8)。チェック信号は、例えば、装置側制御部27、乗りカゴ部102の各ステータスを送信してもよく、端的に初期化が正常に行われたか否かを0,1の2値で送信してもよい。そこで、主制御部24は、初期チェック信号結果を受信する(S10)。この工程は、主制御CPU54のチェック信号受信モジュール56の機能によって実行される。
【0051】
主制御部24は、チェック信号を受信すると、チェック信号の結果を判断する(S12)。チェック信号の判断は、例えば、上記の例で正常に行われている旨の信号を受信すれば、チェック結果がOKであると判断し、正常に行われていない旨の信号を受信すれば、チェック結果がNGであると判断する。
【0052】
チェック結果がOKとされないときは、管理センタ12に対し通報を行う処理手順が実行される(S14)。具体的には、インタネット16を介して通報される。
【0053】
チェック結果がOKとされるときは、乗場36からの呼びの有無を判断する(S18)。この工程は、主制御CPU54の呼び有無判断モジュール58の機能によって実行される。具体的には、各階の乗場36に設置されたいずれかの乗場ボタン134が押されていないときは呼び無と判断され、1つの乗場ボダン134でも押されていれば呼び有と判断される。
【0054】
呼び無と判断されない場合には、呼びが有として対応が行われ(S16)、再びS18に戻る。
【0055】
呼び無と判断された場合には、カゴ扉48,49を全開状態にして停止する(S20)。具体的には、主制御部24からの開閉指令が開閉制御I/F76を介して開閉制御装置106に伝達され、開閉制御装置106はカゴ扉48,49を全開状態にして停止させる。そして、主制御部24は、カゴ扉48,49が全開状態で停止しているか否かをチェックする(S22)。
【0056】
そして、チェックの結果、カゴ扉48,49が全開状態で停止されているか否かが判断される(S24)。この工程は、主制御CPU54の開閉判断モジュール60の機能によって実行される。具体的には、カゴ扉48,49がカゴ壁37に完全に収まって停止されている状態であれば、全開状態で停止されていると判断され、カゴ扉48,49がカゴ壁37に完全に収まっていない半開状態、あるいは停止していない動作中の状態であれば、全開状態で停止されていないと判断される。カゴ扉48,49が全開状態で停止されていないと判断された場合には、再びS20に戻る。
【0057】
カゴ扉48,49が全開状態で停止されている場合には、主制御部24は、装置側制御部27に対し、カゴ扉側ホース136,138と装置側ホース45,47とのホース接続指令を送信する(S26)。
【0058】
装置側制御部27は、ホース接続指令を受信すると(S28)、これに従ってカゴ扉側ホース136,138と装置側ホース45,47とを接続させる(S29)。この工程は、装置側CPU86のホース接続モジュール78の機能によって実行される。具体的には装置側制御部27からの接続制御I/F97を介して接続制御装置118に指令を行い、接続制御装置118は、清掃装置44に備えられた装置側ホース45,47の先端に配置された電磁石150,151に通電を行う。したがって、装置側ホース45,47の先端に配置された電磁石150,151とカゴ扉側ホース136,138が配置されたカゴ扉48,49とは、磁力によって接続される。
【0059】
そして、装置側制御部27は、主制御部24に対し、カゴ扉側ホース136,138と装置側ホース45,47との接続状態の検出信号を送信する(S30)。検出信号は、上記の例で電磁石150,151に通電が行われ、これにより電磁石150,151が正常に作動し、電磁石150,151とカゴ扉48,49とが接続されているか否かを確認するために行われるものである。上記の検出信号は、例えば、接続センサ148,149から出力される検出信号であり、かかる信号は、接続センサI/F94を介して装置側制御部27に送信され、さらに通信制御I/F90と通信制御I/F66を経由して主制御部24に送信される。
【0060】
主制御部24は、装置側制御部27からのホース接続状態の検出信号を受信する(S32)。上記のホース接続状態の検出信号を受信すると、カゴ扉側ホース136,138と装置側ホース45,47と接続状態が判断される(S34)。この工程は、主制御CPU54の接続状態判断モジュール62の機能により実行される。具体的には、例えば、上記の例で言えば一対の受発光素子である接続センサ148,149から出力される検出信号を受信し、光が遮断されていることを示す信号であれば、接続OKと判断し、光が遮断されていないことを示す信号であれば、接続NGと判断される。
【0061】
カゴ扉側ホース136,138と装置側ホース45,47との接続がOKでない場合には、再びS26に戻る。カゴ扉側ホース136,138と装置側ホース45,47との接続がOKである場合には、主制御部24は、装置側制御部27に対し、吸込機作動指令を送信する(S36)。
【0062】
装置側制御部27は、吸込機作動指令を受信し(S38)、これに従って吸引機を作動させる(S39)。この工程は、装置側CPU86の吸込機作動モジュール82の機能によって実行される。具体的には、装置側制御部27から吸込機制御I/F98を介して吸込機制御装置116に指令を行い、吸込機制御装置116は、この指令を受けるとモータに通電し、吸込機144を作動させる。
【0063】
次に、吸込機144の作動状態の検出信号を送信する(S40)。検出信号は、モータに通電し、吸込機144が作動されているか否かを確認するために行われるものである。上記の検出信号は、例えば、作動センサ146において、モータに供給されている電流又は電圧の有無に基づいて信号を生成する。かかる信号が作動センサI/F96を介して装置側制御部27に送信され、さらに通信制御I/F90と通信制御I/F66を経由して主制御部24に送信される。
【0064】
主制御部24は、吸込機144の作動状態の検出信号を受信する(S41)と、吸込機144の作動状態を判断する(S42)。この工程は、主制御CPU54の作動状態判断モジュール64の機能によって実行される。具体的には、例えば、上記の例で言えば作動センサ146から出力される信号を受信し、電流等が有るとされる信号の場合は作動OKと判断し、電流等が無いとされる信号の場合は作動NGと判断される。吸込機144の作動がNGの場合は、再びS36に戻る。
【0065】
吸込機144の作動がOKの場合は、主制御部24からの開閉指令が開閉制御I/F76を介して開閉制御装置106に伝達され、カゴ扉48,49を開閉し、それに伴いカゴ扉側ホース136,138のカゴ溝側口100,101をカゴ敷居溝120,122に沿って往復移動させる(S44)。そして、上記の処理手順S44が所定の回数繰り返されたか否かを判断する(S46)。所定の回数繰り返されていない場合には、再びS44に戻る。
【0066】
なお、所定の回数は任意に設定された複数の回数とすることができる。また、カゴ扉48,49の開閉が正常か異常かを検出する手段を有するときは、カゴ扉48,49が正常となった回数で止めるとしてもよい。
【0067】
所定の回数繰り返されているときは、往復移動は停止され、そして、主制御部24は、装置側制御部27に対し、吸込機停止指令を送信する(S48)。装置側制御部27は、吸込機停止指令を受信すると(S50)、これに従って吸引機を停止させる(S51)。この工程は、装置側CPU86の吸込機停止モジュール84の機能によって実行される。具体的には、装置側制御部27から吸込機制御I/F98を介して吸込機制御装置116に指令を行い、吸込機制御装置116は、モータの通電を止め、吸込機144を停止させる。
【0068】
次に、装置側制御部27は、主制御部24に対し、吸込機144の作動状態の検出信号を送信する(S52)。検出信号は、モータの通電を停止し、吸込機144が停止されているか否かを確認するために行われるものである。上記の検出信号は、例えば、作動センサ146において、モータに供給されている電流又は電圧の有無に基づいて信号を生成する。かかる信号が作動センサI/F96を介して装置側制御部27に送信され、さらに通信制御I/F90と通信制御I/F66を経由して主制御部24に送信される。
【0069】
主制御部24は、吸込機144の作動状態の検出信号を受信する(S54)と、吸込機144の作動状態を判断する(S56)。この工程は、主制御CPU54の作動状態判断モジュール64の機能によって実行される。具体的には、例えば、上記の例で言えば作動センサ146から出力される信号を受信し、電流等が有るとされる信号の場合は作動OKと判断し、電流等が無いとされる信号の場合は作動NGと判断される。吸込機144の停止がNGの場合には、再びS48に戻る。
【0070】
吸込機144の停止がOKの場合には、主制御部24は装置側制御部27に対し、カゴ扉側ホース136,138と装置側ホース45,47の接続を開放するホース開放指令を送信する(S58)。装置側制御部27は、ホース開放指令を受信すると(S60)、これに従ってカゴ扉側ホース136,138と装置側ホース45,47との接続を開放させる(S61)。この工程は、装置側CPU86のホース開放モジュール80の機能によって実行される。具体的には、清掃装置44に備えられた装置側ホース45,47の先端に配置された電磁石150,151の通電を停止し、磁力が失われることにより装置側ホース45,47の先端に配置された電磁石150,151とカゴ扉側ホース136,138が配置されたカゴ扉48,49との接続は開放される。さらに装置側ホース45,47は、バネ38,43の復元力によって所定の位置に戻る。
【0071】
そして、装置側制御部27は、主制御部24に対し、カゴ扉側ホース136,138と装置側ホース45,47との接続状態の検出信号を送信する(S62)。検出信号は、上記の例で電磁石150,151に通電が停止され、電磁石150,151とカゴ扉48,49との接続が開放されているか否かを確認するために行われるものである。上記の検出信号は、例えば、接続センサ148,149により出力される信号であり、かかる信号は、接続センサI/F94を介して装置側制御部27に送信され、さらに通信制御I/F90と通信制御I/F66を経由して主制御部24に送信される。
【0072】
次に、主制御部24は、装置側制御部27からのホース接続状態の検出信号を受信する(S64)と、カゴ扉側ホース136,138と装置側ホース45,47との接続状態が判断される(S66)。この工程は、主制御CPU54の接続状態判断モジュール62の機能により実行される。具体的には、例えば、上記の例で言えば一対の受発光素子である接続センサ148,149から出力される検出信号を受信し、光が遮断されていないことを示す信号であれば、接続の開放OKと判断し、光が遮断されていることを示す信号であれば、接続の開放NGと判断される。
【0073】
カゴ扉側ホース136,138と装置側ホース45,47との接続の開放がOKでない場合には、再びS58に戻る。カゴ扉側ホース136,138と装置側ホース45,47との接続の開放がOKである場合には、カゴ扉を閉じる(S68)。
【0074】
次に、管理センタ12に対し、清掃終了信号を送信する(S70)。そして、清掃モードから通常モードへと切り換える。
【0075】
管理センタ12は、主制御部24からの清掃終了信号を受信する。以上でエレベータのカゴ敷居溝120,122の清掃が終了する。
【0076】
上記では、カゴ敷居溝の清掃について述べたが、エレベータの敷居溝としては、カゴ敷居溝の他に乗場敷居溝もある。この場合に、乗場扉にも同様のホースを設け、各階の乗場に清掃装置を設置して乗場敷居溝の清掃を行ってもよい。また、乗場扉に配置されたホースに上記で述べた乗りカゴの清掃装置を接続するものとしてもよい。この場合は、接続した後は上記のカゴ敷居溝を清掃する場合と同様に清掃装置を作動させることにより清掃できる。このためには、例えば、清掃装置を回転させる必要がある。このように乗りカゴの清掃装置を用いて、乗場敷居溝を清掃するエレベータの敷居溝清掃システムと、上記のカゴ敷居溝を清掃するエレベータの敷居溝清掃システム10との相違は、清掃装置をカゴ扉側から乗場扉側へと回転させることと、清掃が終了した後は再び乗場扉側からカゴ扉側へ清掃装置を逆回転させて戻すことが中心である。以下では、その清掃装置の回転と、乗場扉とのホース接続を中心に説明する。ここで、乗場扉とカゴ扉とは、開閉制御装置で同時に開閉するものとする。なお、乗場扉を清掃するのは、開閉故障が特定の階で生じていることが明らかな場合は、その階のみを清掃するだけでよい。一方、開閉故障が特定されていないときは、全部の階を順次清掃することになる。以下では、特定の階のみを清掃する場合について説明するが、全部の階を清掃する場合も同様に実施できる。
【0077】
図8は、エレベータの敷居溝清掃システム11を示す図である。なお、以下では図1から図7の要素と同様の要素については、同一の符号を用いて詳細な説明を省略する。上記のように清掃モードをカゴ扉敷居溝清掃モードから乗場扉側敷居溝清掃モードに切り替える場合に、追加される構成を中心に示してある。ここで、図8は、図2において示したエレベータの敷居溝清掃システム10のうち、主制御部24と同様の構成を有する主制御部25と、装置側制御部27に回転制御I/F71と中継ホース接続制御I/F110と中継ホース接続センサI/F113と回転状態センサI/F114を加えた装置側制御部29と、乗りカゴ部108と、管理センタ12とを含んで構成される。
【0078】
乗りカゴ部108は、図2で説明した乗りカゴ部102において、少なくとも乗場装置側口152,157周辺が磁性体で構成された乗場扉40,41と、乗場敷居溝128,130と、乗場扉41,40に配置された乗場扉側ホース142,154と、清掃装置44と乗場扉側ホース142,154との接続を中継する中継部124,126とが加えられる。さらに、中継部124,126の中継を制御する中継ホース接続制御装置117と、中継部124,126での接続を監視する中継ホース接続センサ109,111と、清掃装置44の回転を制御する回転制御装置103とが追加される。なお、図2と共通である要素、例えば、開閉センサ104と、開閉制御装置106と、接続センサ148,149と、作動センサ146と、吸込機制御装置116と、接続制御装置118とは図示を省略している。
【0079】
図9は、図8において示された中継部124,126の平面断面図である。中継部124,126は、乗場扉40,41側を向いた開口部148a、149aと、清掃装置44側を向いた開口部172a,174aと、内部に設けられる中継ホース160,162を備える。開口部148a,149aには、中継ホース接続センサ109,111を有し、開口部172a,174aには、回転状態センサ172,174とを有する。また、清掃装置44側を向いた開口部172a,174aの周辺は磁性体で構成される。
【0080】
中継ホース160,162は、伸縮自由な蛇腹状のホースであって、両端が開口している。また、その両端は、それぞれ清掃装置44と乗場扉40,41を向いている。また、中継ホース160,162は、中継部124,126の清掃装置44側を向いた開口部172a,174aに一端が固定され、他端は、自由端で、先端に電磁石164,166が配置されている。また、電磁石164,166の両端部から中継部124,126の中央部の内壁に跨って伸縮を復元方向に付勢しているバネ180,182が取付けられている。
なお、中継ホース160,162の一端は開口部172a,174aに固定されず、場合によっては、自由端で伸縮されてもよい。
【0081】
再び図8に戻り、回転制御装置103は、装置側制御部29のもとで、清掃装置44を乗場床面に垂直な軸の回りに回転させ、装置側ホース45,47の吸込口143,145の向く方向を、カゴ扉48,49に配置されたカゴ扉側ホース136,138と接続可能とするカゴ扉側回転位置と、乗場扉40,41に配置された乗場扉側ホース142,154と中継部124,126を介して接続可能とする乗場扉側回転位置との間で回転させる機能を有する。かかる回転制御装置103は、例えば、ステッピングモータとを含んで構成することができる。
【0082】
回転状態センサ172,174は、受光素子で構成され、清掃装置44を乗場床面に垂直な軸の回りに回転させ、乗場扉側回転位置に位置した時に受光する。具体的には、清掃装置44に配置される接続センサ148,149である一対の受発光素子のうちの発光素子から発光された光を受光することができる。また、ステッピングモータを用いる場合には、ステップ数によってカゴ扉側回転位置と乗場扉側回転位置を検出するものとしてもよい。中継ホース接続センサ109,111は、清掃装置44の接続センサ148,149と同じ機能と構成とを有する。
【0083】
主制御部25は、図2で説明した主制御CPU54において、通常モード制御モジュール51とカゴ敷居溝清掃モジュール群53に、さらに乗場敷居溝清掃モジュール群55が追加される。なお、入力部70、出力部72、開閉センサI/F74、開閉制御I/F76、通信制御66、記憶装置68については、変更がないので図示を省略している。
【0084】
乗場敷居溝清掃モジュール群55は、カゴ敷居溝清掃モードと乗場敷居溝清掃モードとの間のモード切替を行う清掃モード切替モジュール200と、清掃装置44の回転状態を判断する回転状態判断モジュール202と、中継ホース160,162と乗場扉側ホース142,154との接続状態を判断する中継ホース接続状態判断モジュール210とを含んで構成される。
【0085】
装置側制御部29は、図2で説明した装置側CPU86において、カゴ敷居溝清掃モジュール群85に、さらに乗場敷居溝清掃モジュール群87が追加される。なお、接続センサI/F94、作動センサI/F96、吸込機制御I/F98、接続制御I/F97、通信制御I/F90、記憶装置92については、変更がないので図示を省略している。
【0086】
乗場敷居溝清掃モジュール群87は、清掃装置44の回転を制御する回転制御モジュール204と中継ホース160,162と乗場扉側ホース142,154との接続を行う中継ホース接続モジュール206と、中継ホース160,162と乗場扉側ホース142,154との接続の開放を行う中継ホース開放モジュール208とを含んで構成される。
【0087】
かかる構成の作用、特に、主制御部25を構成する主制御CPU54の各機能と、装置側制御部29を構成する装置側CPU86の各機能を図10のフローチャートを用いて以下に説明する。以下では図1から図9の符号を用いて説明する。また、乗場敷居溝128,130を清掃する手順は、カゴ敷居溝120,122を清掃する手順と重複する部分が多いため、相違点を中心に説明を行う。
【0088】
乗場扉側敷居溝清掃モードにおいても、主制御部25は、初期チェック指令送信(S2)からS70は同様に実行する。そして、S70の次に、開閉故障は有るか否かを判断する(S111)。具体的には、乗場扉40,41を開閉し、開閉できない場合は、開閉故障は有ると判断し、開閉できる場合は、開閉故障は無いと判断される。開閉故障が無いと判断される場合は、主制御部25は、管理センタ12に対し清掃完了信号を送信する。その後、清掃モードから通常モードに切り替えられる。
【0089】
開閉故障が有ると判断される場合は、主制御部25は、カゴ敷居溝清掃モードから乗場敷居溝清掃モードへとモード切替を行う(S112)。具体的には、主制御部側CPU54の清掃モード切替モジュール200の機能により実行される。
【0090】
そして、主制御部25は、装置側制御部29に対し、清掃装置44を乗場扉側回転位置に回転させる指令を送信する(S113)。次に、装置側制御部27は、回転指令を受信すると(S115)、それに従って、清掃装置44を乗場扉側回転位置に回転させる(S117)。具体的には、回転制御I/F71を介して回転制御装置103に指令を行い、回転制御装置103は、清掃装置44を回転させる。
【0091】
そして、装置側制御部29は、主制御部25に対し、回転状態検出信号を送信する(S119)。検出信号は、上記の例で清掃装置44が乗場扉側回転位置に位置され、吸込口143,145と開口部172a,174aとが向かい合っているか否かを確認するために行われる。上記の検出信号は、回転状態センサ172,174から出力される検出信号であり、かかる信号は、回転状態センサI/F114を介して装置側制御部29に送信され、さらに通信制御I/F90と通信制御I/F66を経由して主制御部25に送信される。
【0092】
主制御部25は、上記の回転状態検出信号を受信すると(S121)、清掃装置44の回転位置が、乗場扉側回転位置であるか否かが判断される(S123)。この工程は、主制御部側CPU54の回転状態判断モジュール202によって判断される。具体的には、上記の例で言えば、接続センサ148,149の発光素子から発光された光が、回転状態センサ172,174によって受光できる場合には、回転位置OKと判断し、受光できない場合には、回転位置NGと判断される。なお、ステッピングモータを用いる場合には、ステップ数によって位置を検出し、乗場扉側回転位置であるか否かを判断するものとしてもよい。
【0093】
清掃装置44の回転位置がOKでない場合には、再びS113に戻る。清掃装置44の回転位置OKである場合には、主制御部25は、装置側制御部29に対し、中継ホース接続指令を送信する(S125)。
【0094】
装置側制御部29は、中継ホース接続指令を受信すると(S127)、これに従って中継ホース160,162と乗場扉側ホース142,154とを接続させる(S129)。この工程は、装置側CPU86の中継ホース接続モジュール206の機能によって実行される。具体的には、装置側制御部29からの中継ホース接続制御I/F110を介して中継ホース接続制御装置117に指令を行い、中継ホース接続制御装置117は、中継部124,126に備えられた中継ホース160,162の先端に取り付けられた電磁石164,166に通電を行う。したがって、中継ホース160,162の先端に配置された電磁石164,166と乗場扉側ホース142,154が配置された乗場扉40,41とは、磁力によって接続される。
【0095】
そして、装置側制御部29は、主制御部25に対し、乗場扉側ホース142,154と中継ホース160,162との接続状態の検出信号を送信する(S131)。検出信号は、上記の例で電磁石164,166に通電が行われ、これにより電磁石164,166が正常に作動し、電磁石164,166と乗場扉40,41とが接続されているか否かを確認するために行われるものである。上記の検出信号は、例えば、中継ホース接続センサ109,111から出力される検出信号であり、かかる信号は、中継ホース接続センサI/F113を介して装置側制御部29に送信され、さらに通信制御I/F90と通信制御I/F66を経由して主制御部25に送信される。
【0096】
主制御部25は、装置側制御部29からの中継ホース接続状態の検出信号を受信する(S133)と、中継ホース160,162と乗場側ホース142,154との接続状態が判断される(S135)。この工程は、主制御CPU54の中継ホース接続状態判断モジュール210の機能により実行される。具体的には、例えば、上記の例で言えば、一対の受発光素子である中継ホース接続センサ109,111から出力される検出信号を受信し、光が遮断されていることを示す信号であれば、接続OKと判断し、光が遮断されていないことを示す信号であれば、接続NGと判断される。
【0097】
中継ホース160,162と乗場扉側ホース142,154との接続がOKでない場合には、再びS125に戻る。中継ホース160,162と乗場扉側ホース142,154との接続がOKである場合には、カゴ敷居溝120,122の清掃と同様に図7で説明したホース接続指令送信(S26)からホースの接続開放がOKか否かの判断(S66)までの処理手順が事項される。ここで、図7においては、ホースの接続又は開放の対象は、カゴ扉側ホース136,138と装置側ホース45,47との接続又は開放であるが、図10においては、中継ホース160,162と装置側ホース45,47との接続又は開放と、その接続又は開放の対象が変更されて実行される。
【0098】
次に、ホースの接続開放がOKか否かの判断(S66)が実行された後の処理手順について説明する。主制御部25は、装置側制御部29に対し、中継ホース開放指令を送信する(S157)。
【0099】
装置側制御部29は、中継ホース開放指令を受信すると(S159)、これに従って中継ホース160,162と乗場扉側ホース142,154との接続を開放させる(S161)。この工程は、装置側CPU86の中継ホース接続モジュール206の機能によって実行される。具体的には、装置側制御部29からの中継ホース接続制御I/F110を介して中継ホース接続制御装置117に指令を行い、中継ホース接続制御装置117は、中継部124,126に備えられた中継ホース160,162の先端に取り付けられた電磁石164,166に通電を停止し、磁力が失われることにより、中継ホース160,162の先端に配置された電磁石164,166と乗場扉側ホース142,154が配置された乗場扉40,41との接続は開放される。さらに、中継ホース160,162は、バネ180,182の復元力によって所定の位置に戻る。
【0100】
そして、装置側制御部29は、主制御部25に対し、乗場扉側ホース142,154と中継ホース160,162との接続状態の検出信号を送信する(S163)。検出信号は、上記の例で電磁石164,166に通電が停止され、電磁石164,166と乗場扉40,41との接続が開放されているか否かを確認するために行われるものである。上記の検出信号は、中継ホース接続センサ109,111から出力される検出信号であり、かかる信号は、中継ホース接続センサI/F113を介して装置側制御部29に送信され、さらに通信制御I/F90と通信制御I/F66を経由して主制御部25に送信される。
【0101】
主制御部25は、装置側制御部29からの中継ホース接続状態の検出信号を受信する(S165)と、中継ホース160,162と乗場側ホース142,154との接続状態が判断される(S167)。この工程は、主制御CPU54の中継ホース接続状態判断モジュール210の機能により実行される。具体的には、上記の例で言えば、一対の受発光素子である中継ホース接続センサ109,111から出力される検出信号を受信し、光が遮断されていないを示す信号であれば、接続の開放はOKと判断し、光が遮断されていることを示す信号であれば、接続の開放はNGと判断される。
【0102】
中継ホース160,162と乗場側ホース142,154との接続開放がOKで無い場合は、再びS157を実行する。中継ホース160,162と乗場側ホース142,154との接続開放がOKの場合は、主制御部25は、装置側制御部29に対し、清掃装置44をカゴ扉側回転位置に回転させる指令を送信する(S169)。次に、装置側制御部29は、回転指令を受信すると(S171)、それに従って、清掃装置44をカゴ扉側回転位置に回転させる(S172)。具体的には、回転制御I/F71を介して回転制御装置103に指令を行い、回転制御装置103は、清掃装置44を回転させる。
【0103】
そして、装置側制御部29は、主制御部25に対し、回転状態検出信号を送信する(S173)。検出信号は、上記の例で清掃装置44がカゴ扉側回転位置に位置され、吸込口143,145とカゴ装置側口105,107とが向かい合っているか否かを確認するために行われる。上記の検出信号は、例えば、回転状態センサ172,174から出力される検出信号であり、かかる信号は、回転状態センサI/F114を介して装置側制御部29に送信され、さらに通信制御I/F90と通信制御I/F66を経由して主制御部25に送信される。
【0104】
主制御部25は、上記の回転状態検出信号を受信すると(S174)、清掃装置44の回転位置が、カゴ扉側回転位置であるか否かが判断される(S175)。この工程は、主制御CPU54の回転状態判断モジュール202によって判断される。具体的には、例えば、上記の例で言えば、接続センサ148,149の発光素子から発光された光が、回転状態センサ172,174によって受光できない場合には、回転位置OKと判断し、受光できる場合には、回転位置NGと判断される。なお、ステッピングモータを用いる場合には、ステップ数によって位置を検出し、カゴ扉側回転位置であるか否かを判断するものとしてもよい。
【0105】
清掃装置44の回転位置がOKでない場合には、再びS169に戻る。清掃装置44の回転位置OKである場合には、乗場扉を閉じる(S177)。次に、管理センタ12に対し、清掃完了信号を送信する。そして、清掃モードから通常モードへと変更される。このように、乗りカゴに配置された清掃装置を回転させることにより、乗りカゴに配置された清掃装置を用いて、乗場敷居溝128,130を清掃することできる。
【0106】
次に、他の実施の形態について説明する。上記のように、乗場敷居溝128,130を清掃する場合、乗りカゴに配置された清掃装置44の位置を回転することにより清掃することができるが、図11に示される清掃装置52を用いても清掃することができる。
【0107】
図11は、図8に示された乗りカゴ部108において、中継部124,126と清掃装置44の要素を清掃装置52に置き換えたものである。
【0108】
清掃装置52は、図2、図8において説明した清掃装置44とほぼ同様の構成を有し、その相違は、装置側ホースが内部に配置されるホースケース230,232の形状が異なることである。ホースケース230,232の形状は、吸込機等を格納した筐体の側面に垂直な方向に突出しているが、途中でカゴ扉48,49を向いている。さらに、清掃装置52は、ホースケース230,232の先端がカゴ扉48,49のカゴ装置側口105,107と向かい合う位置に配置されている。
【0109】
この清掃装置52は、カゴ敷居溝120,122を清掃する位置に配置されているが、これを乗場扉40,41側にスライドすることにより、ホースケース230,232の先端が乗場扉40,41の乗場装置側口152,157と向かい合う位置に配置することができる。ここで、ホースケース230,232は実線で描かれた場合は、カゴ敷居溝120,122を清掃する場合を示し、破線で描かれた場合には、乗場敷居溝128,130を清掃する場合を示している。
【0110】
このように、清掃装置52を乗りカゴ42の床面に平行な方向で乗場扉40,41側に移動させることにより、カゴ敷居溝120,122も乗場敷居溝128,130も清掃することができる。
【図面の簡単な説明】
【0111】
【図1】本発明に係る実施の形態のエレベータの敷居溝清掃システムが適用されるエレベータ全体を示す図である。
【図2】本発明に係る実施の形態のエレベータの敷居溝清掃システムを示す図である。
【図3】本発明に係る実施の形態における乗場周辺を示す図である。
【図4】図3におけるA−A断面図である。
【図5】本発明に係る実施の形態における乗りカゴ周辺を示す図である。
【図6】本発明に係る実施の形態における清掃装置の側面図、及び図4におけるB−B断面図である。
【図7(a)】本発明に係る実施の形態におけるエレベータの敷居溝清掃システムのフローチャートを示す図である。
【図7(b)】本発明に係る実施の形態におけるエレベータの敷居溝清掃システムのフローチャートを示す図である。
【図7(c)】本発明に係る実施の形態におけるエレベータの敷居溝清掃システムのフローチャートを示す図である。
【図8】他の実施の形態のエレベータの敷居溝清掃システムを示す図である。
【図9】他の実施の形態における中継部の断面図を示す図である。
【図10(a)】他の実施の形態におけるエレベータの敷居溝清掃システムのフローチャートを示す図である。
【図10(b)】他の実施の形態におけるエレベータの敷居溝清掃システムのフローチャートを示す図である。
【図10(c)】他の実施の形態におけるエレベータの敷居溝清掃システムのフローチャートを示す図である。
【図11】さらに他の実施の形態のエレベータの敷居溝清掃システムを示す図である。
【符号の説明】
【0112】
10,11 エレベータの敷居溝清掃システム、12 管理センタ、16 インタネット、20 機械室、22 巻上機、24,25 主制御部、27,29 装置側制御部、30 主ロープ、28,32 通信ケーブル、36 乗場、37 カゴ壁、39 カゴ室、40,41 乗場扉、38,43,180,182 バネ、42 乗りカゴ、44、52 清掃装置、45,47 装置側ホース、46 乗客、48,49 カゴ扉、50 昇降路、51 通常モード制御モジュール、53,85 カゴ敷居溝清掃モジュール群、54、主制御CPU、55,87 乗場敷居溝清掃モジュール群、56 チェック信号受信モジュール、58 呼び有無判断モジュール、60 開閉判断モジュール、62 接続状態判断モジュール、64 作動状態判断モジュール、66,90 通信制御I/F、68,92 記憶装置、70 入力部、71 回転制御I/F、72 出力部、74 開閉センサI/F、76 開閉制御I/F、78 ホース接続モジュール、80 ホース開放モジュール、82 吸込機作動モジュール、84 吸込機停止モジュール、86 装置側CPU、94 接続センサI/F、96 作動センサI/F、97 接続制御I/F、98 吸込機制御I/F、100,101 カゴ溝側口、102 乗りカゴ部、103 回転制御装置、104 開閉センサ、105,107 カゴ装置側口、108 乗りカゴ部、106 開閉駆動装置、109,111、 中継ホース接続センサ、110 中継ホース接続制御I/F、112 作動センサ、113 中継ホース接続センサI/F、114 回転状態センサI/F、116 吸込機制御装置、117 中継ホース接続制御装置、118 接続制御装置、120,122 カゴ敷居溝、124,126 中継部、128,130 乗場敷居溝、132 乗場壁、134 乗場ボタン、136,138 カゴ扉側ホース、141 ゴミ保管部、142,154 乗場側ホース、143,145 吸込口、144 吸込機、146 作動センサ、148a,149a 開口部、148,149 接続センサ、150,151,164,166 電磁石、152,157, 乗場装置側口、153 蓋部、160,162 中継ホース、172,174 回転状態センサ、172a,174a 開口部、200 清掃モード切替モジュール、202 回転状態判断モジュール、204 回転制御モジュール、206 中継ホース接続モジュール、208 中継ホース開放モジュール、210 中継ホース接続状態判断モジュール、230,232 ホースケース。
【特許請求の範囲】
【請求項1】
開閉機構により開閉されるカゴ扉と、カゴ扉の開閉移動を案内するカゴ敷居溝と、一端にカゴ溝側口を有し他端にカゴ装置側口を有するカゴ扉側ホースと、を含む乗りカゴと、
吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、カゴ装置側口と吸込口との間を接続し又は開放する手段と、カゴ扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、
清掃装置を制御する装置側制御部と、
装置側制御部と通信経路を介して接続され、カゴ扉の開閉制御を含みエレベータ全体を制御する主制御部と、
を備え、
主制御部は、
カゴ扉を全開状態とし、そこで停止させる手段と、
カゴ扉の開閉状態を判断し、カゴ扉が全開状態で停止されている場合に、装置側制御部に対し、カゴ扉側ホースと装置側ホースとを接続させる接続指令を送信する手段と、
装置側制御部から、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらが接続されている場合に、装置側制御部に対し、吸込機作動指令を送信する手段と、
装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が作動している場合に、カゴ扉を所定回数開閉し、それに伴いカゴ扉側ホースのカゴ溝側口をカゴ敷居溝に沿って往復移動させる手段と、
装置側制御部に対し、吸込機停止指令を送信する手段と、
装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が停止している場合に、装置側制御部に対し、カゴ扉側ホースと装置側ホースとの接続を開放させる開放指令を送信する手段と、
装置側制御部から、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらの接続が開放されている場合に、カゴ扉を閉じる手段と、
を含むことを特徴とするエレベータの敷居溝清掃システム。
【請求項2】
開閉機構により開閉されるカゴ扉と、カゴ扉の開閉移動を案内するカゴ敷居溝と、一端にカゴ溝側口を有し他端にカゴ装置側口を有するカゴ扉側ホースと、を含む乗りカゴと、
吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、カゴ装置側口と吸込口との間を接続し又は開放する手段と、カゴ扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、
清掃装置を制御する装置側制御部と、
装置側制御部と通信経路を介して接続され、カゴ扉の開閉制御を含みエレベータ全体を制御する主制御部と、
を備え、
装置側制御部は、
主制御部から、カゴ扉側ホースと装置側ホースとを接続させる接続指令を受信し、これに従ってカゴ扉側ホースと装置側ホースとを接続させ、主制御部に対し、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を送信する手段と、
主制御部から、吸込機作動指令を受信し、これに従って吸引機を作動させ、主制御部に対し、吸込機の作動状態の検出信号を送信する手段と、
主制御部から、カゴ扉側ホースと装置側ホースとの接続を開放させる開放指令を受信し、カゴ扉側ホースと装置側ホースとの接続を開放させ、主制御部に対し、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を送信する手段と、
を備えることを特徴とするエレベータの敷居溝清掃システム。
【請求項3】
請求項1または請求項2に記載のエレベータの敷居溝清掃システムにおいて、
カゴ扉側ホースと装置側ホースの少なくともいずれか一方が伸縮可能であることを特徴とするエレベータの敷居溝清掃システム。
【請求項4】
請求項1から請求項3のいずれか1に記載のエレベータの敷居溝清掃システムにおいて、
清掃装置は、乗りカゴに設けられることを特徴とするエレベータの敷居溝清掃システム。
【請求項5】
請求項1から請求項4のいずれか1に記載のエレベータの敷居溝清掃システムにおいて、
カゴ扉側ホースと装置側ホースとを接続し又は開放する手段は、電磁石を用いるものであって、
カゴ扉側ホースと装置側ホースとを接続するときの電磁石通電方向と、カゴ扉側ホースと装置側ホースとの接続を開放するときの電磁石通電方向とは、互いに逆の通電方向であることを特徴とするエレベータの敷居溝清掃システム。
【請求項6】
請求項1から請求項5のいずれか1に記載のエレベータの敷居溝清掃システムにおいて、
主制御部は、外部の管理センタとネットワークで接続され、管理センタからの清掃指令を受信し、これにしたがってエレベータの敷居溝清掃システムを作動させることを特徴とするエレベータの敷居溝清掃システム。
【請求項7】
開閉機構により開閉される乗場扉と、乗場扉の開閉移動を案内する乗場敷居溝と、一端に乗場溝側口を有し他端に乗場装置側口を有する乗場扉側ホースと、を含む乗場部と、
吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、乗場装置側口と吸込口との間を接続し又は開放する手段と、乗場扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、
清掃装置を制御する装置側制御部と、
装置側制御部と通信経路を介して接続され、乗場扉の開閉制御を含みエレベータ全体を制御する主制御部と、
を備え、
主制御部は、
乗場扉を全開状態とし、そこで停止させる手段と、
乗場扉の開閉状態を判断し、乗場扉が全開状態で停止されている場合に、乗場扉側ホースと装置側ホースとを接続させる接続指令を送信する手段と、
装置側制御部から、乗場扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらが接続されている場合に、装置側制御部に対し、吸込機作動指令を送信する手段と、
装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が作動している場合に、乗場扉を所定回数開閉し、それに伴い乗場扉側ホースの乗場溝側口を乗場敷居溝に沿って往復移動させる手段と、
装置側制御部に対し、吸込機停止指令を送信する手段と、
装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が停止している場合に、装置側制御部に対し、乗場扉側ホースと装置側ホースとの間を開放させる開放指令を送信する手段と、
装置側制御部から、乗場扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらの接続が開放されている場合に、乗場扉を閉じる手段と、
を含むことを特徴とするエレベータの敷居溝清掃システム。
【請求項8】
開閉機構により開閉される乗場扉と、乗場扉の開閉移動を案内する乗場敷居溝と、一端に乗場溝側口を有し他端に乗場装置側口を有する乗場扉側ホースと、を含む乗場部と、
吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、乗場装置側口と吸込口との間を接続し又は開放する手段と、乗場扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、
清掃装置を制御する装置側制御部と、
装置側制御部と通信経路を介して接続され、乗場扉の開閉制御を含みエレベータ全体を制御する主制御部と、
を備え、
装置側制御部は、
主制御部から、乗場扉側ホースと装置側ホースとを接続させる接続指令を受信し、これに従って乗場扉側ホースと装置側ホースとを接続させ、主制御部に対し、乗場扉側ホースと装置側ホースとの接続状態の検出信号を送信する手段と、
主制御部から、吸込機作動指令を受信し、これに従って吸引機を作動させ、主制御部に対し、吸込機の作動状態の検出信号を送信する手段と、
主制御部から、吸込機停止指令を受信し、これに従って吸引機を停止させ、主制御部に対し、吸込機の作動状態の検出信号を送信する手段と、
主制御部から、乗場扉側ホースと装置側ホースとの接続を開放させる開放指令を受信し、乗場扉側ホースと装置側ホースとの接続を開放させ、主制御部に対し、乗場扉側ホースと装置側ホースとの接続状態の検出信号を送信する手段と、
を備えることを特徴とするエレベータの敷居溝清掃システム。
【請求項9】
請求項7または請求項8に記載のエレベータの敷居溝清掃システムにおいて、
清掃装置は、乗りカゴに設けられることを特徴とするエレベータの敷居溝清掃システム。
【請求項10】
請求項9に記載のエレベータの敷居溝清掃システムにおいて、
清掃装置は、さらに清掃装置を回転させる回転駆動機構を備え、
回転駆動機構は、管理センタからの清掃指令が、カゴ敷居溝清掃指令か乗場敷居溝清掃指令かに応じて、清掃装置の吸込口をカゴ装置側口に接続できる位置と清掃装置の吸込口を乗場装置側口に接続できる位置との間で清掃装置を回転させることを特徴とするエレベータの敷居溝清掃システム。
【請求項11】
請求項9に記載のエレベータの敷居溝清掃システムにおいて、
清掃装置は、さらに清掃装置を移動させる移動機構を備え、
移動機構は、管理センタからの清掃指令が、カゴ敷居溝清掃指令か乗場敷居溝清掃指令かに応じ、乗りカゴの床面に平行な方向であって乗場扉側に清掃装置を移動させることを特徴とするエレベータの敷居溝清掃システム。
【請求項12】
開閉機構により開閉されるカゴ扉と、カゴ扉の開閉移動を案内するカゴ敷居溝と、一端にカゴ溝側口を有し他端にカゴ装置側口を有するカゴ扉側ホースと、を含む乗りカゴと、
吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、カゴ装置側口と吸込口との間を接続し又は開放する手段と、カゴ扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、
清掃装置を制御する装置側制御部と、
装置側制御部と通信経路を介して接続され、カゴ扉の開閉制御を含みエレベータ全体を制御する主制御部と、
を備えるエレベータの敷居溝清掃システムの主制御部上で実行される主制御部用敷居溝清掃プログラムであって、
カゴ扉を全開状態とし、そこで停止させる処理手順と、
カゴ扉の開閉状態を判断し、カゴ扉が全開状態で停止されている場合に、装置側制御部に対し、カゴ扉側ホースと装置側ホースとを接続させる接続指令を送信する処理手順と、
装置側制御部から、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらが接続されている場合に、装置側制御部に対し、吸込機作動指令を送信する処理手順と、
装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が作動している場合に、カゴ扉を所定回数開閉し、それに伴いカゴ扉側ホースのカゴ溝側口をカゴ敷居溝に沿って往復移動させる処理手順と、
装置側制御部に対し、吸込機停止指令を送信する処理手順と、
装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が停止している場合に、装置側制御部に対し、カゴ扉側ホースと装置側ホースとの接続を開放させる開放指令を送信する処理手順と、
装置側制御部から、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらの接続が開放されている場合に、カゴ扉を閉じる処理手順と、
が実行される主制御部用敷居溝清掃プログラム。
【請求項13】
開閉機構により開閉されるカゴ扉と、カゴ扉の開閉移動を案内するカゴ敷居溝と、一端にカゴ溝側口を有し他端にカゴ装置側口を有するカゴ扉側ホースと、を含む乗りカゴと、
吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、カゴ装置側口と吸込口との間を接続し又は開放する手段と、カゴ扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、
清掃装置を制御する装置側制御部と、
装置側制御部と通信経路を介して接続され、カゴ扉の開閉制御を含みエレベータ全体を制御する主制御部と、
を備えるエレベータの敷居溝清掃システムの装置側制御部上で実行される装置側制御部用敷居溝清掃プログラムであって、
主制御部から、カゴ扉側ホースと装置側ホースとを接続させる接続指令を受信し、これに従ってカゴ扉側ホースと装置側ホースとを接続させ、主制御部に対し、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を送信する処理手順と、
主制御部から、吸込機作動指令を受信し、これに従って吸引機を作動させ、主制御部に対し、吸込機の作動状態の検出信号を送信する処理手順と、
主制御部から、吸込機停止指令を受信し、これに従って吸引機を停止させ、主制御部に対し、吸込機の作動状態の検出信号を送信する処理手順と、
主制御部から、カゴ扉側ホースと装置側ホースとの接続を開放させる開放指令を受信し、カゴ扉側ホースと装置側ホースとの接続を開放させ、主制御部に対し、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を送信する処理手順と、
が実行される装置側制御部用敷居溝清掃プログラム。
【請求項14】
エレベータの乗りカゴのカゴ扉を案内する敷居溝を清掃するエレベータの敷居溝清掃方法であって、
カゴ扉を全開状態とし、そこで停止させる工程と、
乗りカゴに設けられ一端にカゴ溝側口を有し他端にカゴ装置側口を有するカゴ扉側ホースと吸込口が配置され吸込機に設けられる装置側ホースとを接続させる工程と、
吸込機を作動させる工程と、
カゴ扉を所定回数開閉し、それに伴いカゴ扉側ホースのカゴ溝側口をカゴ敷居溝に沿って往復移動させる工程と、
カゴ扉を閉じる工程とを含むエレベータの敷居溝清掃方法。
【請求項1】
開閉機構により開閉されるカゴ扉と、カゴ扉の開閉移動を案内するカゴ敷居溝と、一端にカゴ溝側口を有し他端にカゴ装置側口を有するカゴ扉側ホースと、を含む乗りカゴと、
吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、カゴ装置側口と吸込口との間を接続し又は開放する手段と、カゴ扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、
清掃装置を制御する装置側制御部と、
装置側制御部と通信経路を介して接続され、カゴ扉の開閉制御を含みエレベータ全体を制御する主制御部と、
を備え、
主制御部は、
カゴ扉を全開状態とし、そこで停止させる手段と、
カゴ扉の開閉状態を判断し、カゴ扉が全開状態で停止されている場合に、装置側制御部に対し、カゴ扉側ホースと装置側ホースとを接続させる接続指令を送信する手段と、
装置側制御部から、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらが接続されている場合に、装置側制御部に対し、吸込機作動指令を送信する手段と、
装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が作動している場合に、カゴ扉を所定回数開閉し、それに伴いカゴ扉側ホースのカゴ溝側口をカゴ敷居溝に沿って往復移動させる手段と、
装置側制御部に対し、吸込機停止指令を送信する手段と、
装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が停止している場合に、装置側制御部に対し、カゴ扉側ホースと装置側ホースとの接続を開放させる開放指令を送信する手段と、
装置側制御部から、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらの接続が開放されている場合に、カゴ扉を閉じる手段と、
を含むことを特徴とするエレベータの敷居溝清掃システム。
【請求項2】
開閉機構により開閉されるカゴ扉と、カゴ扉の開閉移動を案内するカゴ敷居溝と、一端にカゴ溝側口を有し他端にカゴ装置側口を有するカゴ扉側ホースと、を含む乗りカゴと、
吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、カゴ装置側口と吸込口との間を接続し又は開放する手段と、カゴ扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、
清掃装置を制御する装置側制御部と、
装置側制御部と通信経路を介して接続され、カゴ扉の開閉制御を含みエレベータ全体を制御する主制御部と、
を備え、
装置側制御部は、
主制御部から、カゴ扉側ホースと装置側ホースとを接続させる接続指令を受信し、これに従ってカゴ扉側ホースと装置側ホースとを接続させ、主制御部に対し、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を送信する手段と、
主制御部から、吸込機作動指令を受信し、これに従って吸引機を作動させ、主制御部に対し、吸込機の作動状態の検出信号を送信する手段と、
主制御部から、カゴ扉側ホースと装置側ホースとの接続を開放させる開放指令を受信し、カゴ扉側ホースと装置側ホースとの接続を開放させ、主制御部に対し、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を送信する手段と、
を備えることを特徴とするエレベータの敷居溝清掃システム。
【請求項3】
請求項1または請求項2に記載のエレベータの敷居溝清掃システムにおいて、
カゴ扉側ホースと装置側ホースの少なくともいずれか一方が伸縮可能であることを特徴とするエレベータの敷居溝清掃システム。
【請求項4】
請求項1から請求項3のいずれか1に記載のエレベータの敷居溝清掃システムにおいて、
清掃装置は、乗りカゴに設けられることを特徴とするエレベータの敷居溝清掃システム。
【請求項5】
請求項1から請求項4のいずれか1に記載のエレベータの敷居溝清掃システムにおいて、
カゴ扉側ホースと装置側ホースとを接続し又は開放する手段は、電磁石を用いるものであって、
カゴ扉側ホースと装置側ホースとを接続するときの電磁石通電方向と、カゴ扉側ホースと装置側ホースとの接続を開放するときの電磁石通電方向とは、互いに逆の通電方向であることを特徴とするエレベータの敷居溝清掃システム。
【請求項6】
請求項1から請求項5のいずれか1に記載のエレベータの敷居溝清掃システムにおいて、
主制御部は、外部の管理センタとネットワークで接続され、管理センタからの清掃指令を受信し、これにしたがってエレベータの敷居溝清掃システムを作動させることを特徴とするエレベータの敷居溝清掃システム。
【請求項7】
開閉機構により開閉される乗場扉と、乗場扉の開閉移動を案内する乗場敷居溝と、一端に乗場溝側口を有し他端に乗場装置側口を有する乗場扉側ホースと、を含む乗場部と、
吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、乗場装置側口と吸込口との間を接続し又は開放する手段と、乗場扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、
清掃装置を制御する装置側制御部と、
装置側制御部と通信経路を介して接続され、乗場扉の開閉制御を含みエレベータ全体を制御する主制御部と、
を備え、
主制御部は、
乗場扉を全開状態とし、そこで停止させる手段と、
乗場扉の開閉状態を判断し、乗場扉が全開状態で停止されている場合に、乗場扉側ホースと装置側ホースとを接続させる接続指令を送信する手段と、
装置側制御部から、乗場扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらが接続されている場合に、装置側制御部に対し、吸込機作動指令を送信する手段と、
装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が作動している場合に、乗場扉を所定回数開閉し、それに伴い乗場扉側ホースの乗場溝側口を乗場敷居溝に沿って往復移動させる手段と、
装置側制御部に対し、吸込機停止指令を送信する手段と、
装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が停止している場合に、装置側制御部に対し、乗場扉側ホースと装置側ホースとの間を開放させる開放指令を送信する手段と、
装置側制御部から、乗場扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらの接続が開放されている場合に、乗場扉を閉じる手段と、
を含むことを特徴とするエレベータの敷居溝清掃システム。
【請求項8】
開閉機構により開閉される乗場扉と、乗場扉の開閉移動を案内する乗場敷居溝と、一端に乗場溝側口を有し他端に乗場装置側口を有する乗場扉側ホースと、を含む乗場部と、
吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、乗場装置側口と吸込口との間を接続し又は開放する手段と、乗場扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、
清掃装置を制御する装置側制御部と、
装置側制御部と通信経路を介して接続され、乗場扉の開閉制御を含みエレベータ全体を制御する主制御部と、
を備え、
装置側制御部は、
主制御部から、乗場扉側ホースと装置側ホースとを接続させる接続指令を受信し、これに従って乗場扉側ホースと装置側ホースとを接続させ、主制御部に対し、乗場扉側ホースと装置側ホースとの接続状態の検出信号を送信する手段と、
主制御部から、吸込機作動指令を受信し、これに従って吸引機を作動させ、主制御部に対し、吸込機の作動状態の検出信号を送信する手段と、
主制御部から、吸込機停止指令を受信し、これに従って吸引機を停止させ、主制御部に対し、吸込機の作動状態の検出信号を送信する手段と、
主制御部から、乗場扉側ホースと装置側ホースとの接続を開放させる開放指令を受信し、乗場扉側ホースと装置側ホースとの接続を開放させ、主制御部に対し、乗場扉側ホースと装置側ホースとの接続状態の検出信号を送信する手段と、
を備えることを特徴とするエレベータの敷居溝清掃システム。
【請求項9】
請求項7または請求項8に記載のエレベータの敷居溝清掃システムにおいて、
清掃装置は、乗りカゴに設けられることを特徴とするエレベータの敷居溝清掃システム。
【請求項10】
請求項9に記載のエレベータの敷居溝清掃システムにおいて、
清掃装置は、さらに清掃装置を回転させる回転駆動機構を備え、
回転駆動機構は、管理センタからの清掃指令が、カゴ敷居溝清掃指令か乗場敷居溝清掃指令かに応じて、清掃装置の吸込口をカゴ装置側口に接続できる位置と清掃装置の吸込口を乗場装置側口に接続できる位置との間で清掃装置を回転させることを特徴とするエレベータの敷居溝清掃システム。
【請求項11】
請求項9に記載のエレベータの敷居溝清掃システムにおいて、
清掃装置は、さらに清掃装置を移動させる移動機構を備え、
移動機構は、管理センタからの清掃指令が、カゴ敷居溝清掃指令か乗場敷居溝清掃指令かに応じ、乗りカゴの床面に平行な方向であって乗場扉側に清掃装置を移動させることを特徴とするエレベータの敷居溝清掃システム。
【請求項12】
開閉機構により開閉されるカゴ扉と、カゴ扉の開閉移動を案内するカゴ敷居溝と、一端にカゴ溝側口を有し他端にカゴ装置側口を有するカゴ扉側ホースと、を含む乗りカゴと、
吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、カゴ装置側口と吸込口との間を接続し又は開放する手段と、カゴ扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、
清掃装置を制御する装置側制御部と、
装置側制御部と通信経路を介して接続され、カゴ扉の開閉制御を含みエレベータ全体を制御する主制御部と、
を備えるエレベータの敷居溝清掃システムの主制御部上で実行される主制御部用敷居溝清掃プログラムであって、
カゴ扉を全開状態とし、そこで停止させる処理手順と、
カゴ扉の開閉状態を判断し、カゴ扉が全開状態で停止されている場合に、装置側制御部に対し、カゴ扉側ホースと装置側ホースとを接続させる接続指令を送信する処理手順と、
装置側制御部から、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらが接続されている場合に、装置側制御部に対し、吸込機作動指令を送信する処理手順と、
装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が作動している場合に、カゴ扉を所定回数開閉し、それに伴いカゴ扉側ホースのカゴ溝側口をカゴ敷居溝に沿って往復移動させる処理手順と、
装置側制御部に対し、吸込機停止指令を送信する処理手順と、
装置側制御部から、吸込機の作動状態の検出信号を受信し、吸込機が停止している場合に、装置側制御部に対し、カゴ扉側ホースと装置側ホースとの接続を開放させる開放指令を送信する処理手順と、
装置側制御部から、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を受信し、これらの接続が開放されている場合に、カゴ扉を閉じる処理手順と、
が実行される主制御部用敷居溝清掃プログラム。
【請求項13】
開閉機構により開閉されるカゴ扉と、カゴ扉の開閉移動を案内するカゴ敷居溝と、一端にカゴ溝側口を有し他端にカゴ装置側口を有するカゴ扉側ホースと、を含む乗りカゴと、
吸込口が配置される装置側ホースを有する吸込機と、吸込機の作動状態を検出する検出手段と、カゴ装置側口と吸込口との間を接続し又は開放する手段と、カゴ扉側ホースと装置側ホースとの間の接続状態を検出する検出手段と、を含む清掃装置と、
清掃装置を制御する装置側制御部と、
装置側制御部と通信経路を介して接続され、カゴ扉の開閉制御を含みエレベータ全体を制御する主制御部と、
を備えるエレベータの敷居溝清掃システムの装置側制御部上で実行される装置側制御部用敷居溝清掃プログラムであって、
主制御部から、カゴ扉側ホースと装置側ホースとを接続させる接続指令を受信し、これに従ってカゴ扉側ホースと装置側ホースとを接続させ、主制御部に対し、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を送信する処理手順と、
主制御部から、吸込機作動指令を受信し、これに従って吸引機を作動させ、主制御部に対し、吸込機の作動状態の検出信号を送信する処理手順と、
主制御部から、吸込機停止指令を受信し、これに従って吸引機を停止させ、主制御部に対し、吸込機の作動状態の検出信号を送信する処理手順と、
主制御部から、カゴ扉側ホースと装置側ホースとの接続を開放させる開放指令を受信し、カゴ扉側ホースと装置側ホースとの接続を開放させ、主制御部に対し、カゴ扉側ホースと装置側ホースとの接続状態の検出信号を送信する処理手順と、
が実行される装置側制御部用敷居溝清掃プログラム。
【請求項14】
エレベータの乗りカゴのカゴ扉を案内する敷居溝を清掃するエレベータの敷居溝清掃方法であって、
カゴ扉を全開状態とし、そこで停止させる工程と、
乗りカゴに設けられ一端にカゴ溝側口を有し他端にカゴ装置側口を有するカゴ扉側ホースと吸込口が配置され吸込機に設けられる装置側ホースとを接続させる工程と、
吸込機を作動させる工程と、
カゴ扉を所定回数開閉し、それに伴いカゴ扉側ホースのカゴ溝側口をカゴ敷居溝に沿って往復移動させる工程と、
カゴ扉を閉じる工程とを含むエレベータの敷居溝清掃方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7(a)】
【図7(b)】
【図7(c)】
【図8】
【図9】
【図10(a)】
【図10(b)】
【図10(c)】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7(a)】
【図7(b)】
【図7(c)】
【図8】
【図9】
【図10(a)】
【図10(b)】
【図10(c)】
【図11】
【公開番号】特開2008−290823(P2008−290823A)
【公開日】平成20年12月4日(2008.12.4)
【国際特許分類】
【出願番号】特願2007−136456(P2007−136456)
【出願日】平成19年5月23日(2007.5.23)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
【公開日】平成20年12月4日(2008.12.4)
【国際特許分類】
【出願日】平成19年5月23日(2007.5.23)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
[ Back to top ]