
エレベータの運行管理システム
【解決課題】主索の状態の如何に拘わらず、非常止め装置の誤作動を伴うことなく、エレベータの安全運行管理を継続できるシステムを提供する。
【解決手段】エレベータの乗りかご1、釣り合い重り8のガバナ21,31に取り付けられたエンコーダ22,32からのパルス信号を基に、安全コントローラ50は、乗りかご1及び釣合い重り8の進行方向、移動速度、移動距離を算出し、算出結果から主索の状態を判定する、主索に異常がある場合、安全コントローラ50は、非常止め装置25,35を作動させる。
【解決手段】エレベータの乗りかご1、釣り合い重り8のガバナ21,31に取り付けられたエンコーダ22,32からのパルス信号を基に、安全コントローラ50は、乗りかご1及び釣合い重り8の進行方向、移動速度、移動距離を算出し、算出結果から主索の状態を判定する、主索に異常がある場合、安全コントローラ50は、非常止め装置25,35を作動させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エレベータの運行管理システムに係り、特に、乗りかごと釣合い重りとを連結する主索の状態を判定し、この判定結果に応じて、乗りかごの安全運行を制御することを内容とするエレベータの安全運行管理システムに関するものである。
【背景技術】
【0002】
従来から、エレベータには、乗りかごを安全に運行するための制御装置が設けられている。この種の制御装置として、例えば、特開2004−107075号公報に、昇降かごの移動状態が、上下のシーブ間に調速ワイヤーを巻き掛けた構成の調速装置により監視され、昇降かごの異常落下を検出した際に非常止め装置を動作させる構成としたエレベータ等の昇降機械に設けられた異常検出機構が開示されている。
【0003】
この異常検出機構は、通常のエレベータにおいて用いられている非常止め装置が、無重力状態を体感させるための、昇降かごを自由落下と同様な状態で下降させるようにした遊戯施設の昇降機械に適用されようとした場合、昇降かごが、正常動作における自由落下をしているのか、メインロープの切断等の異常により落下しているのかを判別することはできないことを解決するために、調速装置による調速機構を次のように構成している。
【0004】
昇降かご側とカウンタウェイト側の上部のシーブを、夫々近接させて共通回転軸に回転自在に設け、共通回転軸に左右のシーブ間においてストッパー装置を回転自在に設けると共に、ストッパー装置には共通回転軸に対して進退可能にストッパーねじを設け、夫々のシーブの対向面に環状ラック部を形成すると共に、これらのラックに歯合させた差動ギアをストッパーねじに固定する。
【0005】
メインロープが切断されるといった異常が発生すると、昇降かごとカウンタウェイトは、夫々独立に自由落下する。すると、昇降かご側の調速ワイヤーとカウンタウェイト側の調速ワイヤーは、正常動作の場合とは逆の方向に移動することになり、夫々のシーブも逆方向に回転する。
【0006】
夫々のシーブが逆方向に回転すると、それらのラックに歯合している差動ギアが回転して、ストッパーねじの先端が共通回転軸の外周に圧接して、共通回転軸の回転が不能になる。その結果、非常止め用レバーが調速ワイヤーにより引き上げられることにより非常止め装置が動作し、非常止め用のくさびがガイドレール4に食い込むことにより、昇降かごの落下が阻止される。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2004−107075
【発明の概要】
【発明が解決しようとする課題】
【0008】
既述の従来技術に係る異常検出機構は、かごと釣合い重りの荷重による主索の伸びについて配慮していないために、主索にエレベータの安全運行上支障が無い程度の伸びが発生したに過ぎない場合であっても、これを主索の切断と区別することができず、直ちに、差動ギアを動作させてしまい非常止め装置の誤作動をさせてしまうといった課題があった。一方、非常止め装置の誤作動を防止するために、主索の伸びによる影響がないように、異常検出装置を動作させようとすると、勢い、主索の切断が見逃されてしまうおそれもある。
【0009】
そこで、本発明は、主索の状態の如何に拘わらず、非常止め装置の誤作動を伴うことなく、エレベータの安全運行管理を継続できるシステムを提供することを目的とする。
【課題を解決するための手段】
【0010】
前記目的を達成するために、本発明に係るエレベータの運行管理システムは、乗りかごと釣合い重りとの運行状況から主索の状態を判定し、判定された主索の状態に応じて、非常止め装置を誤作動させることなく、エレベータの安全運行を継続できることを特徴とするものである。
【0011】
本発明に係るエレベータの運行管理システムによれば、主索の状態を判定することができるために、主索に伸びや縮み等が発生しただけで非常止め装置を誤停止させてしまうことを防止しながら、エレベータの安全運行管理を継続することができる。
【発明の効果】
【0012】
本発明によれば、主索の状態の如何に拘わらず、非常止め装置の誤作動を伴うことなく、エレベータの安全運行管理を継続できるエレベータの運行管理システムを提供することができる。
【図面の簡単な説明】
【0013】
【図1】本発明に係る、エレベータの運行管理システムの実施形態のブロック構成図である。
【図2】エレベータの運行管理システムに設けられた、エレベータの安全運行を管理する安全コントローラのブロック構成図である。
【図3】安全コントローラの動作の一例を示すフローチャートである。
【発明を実施するための形態】
【0014】
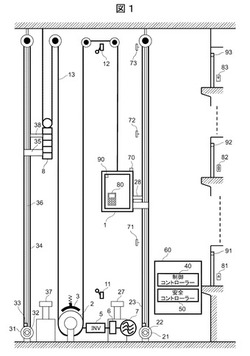
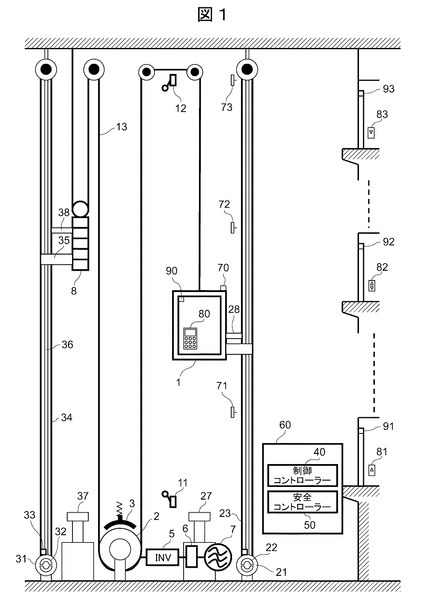
図1は、エレベータの運行管理システムの実施形態に係るブロック図である。エレベータとして、屋上に機械室を必要としない、機械室レスと呼ばれるタイプのものを例にして説明する。このタイプのエレベータでは、巻上機、制御盤は昇降路内に配置されている。
【0015】
巻上機2は、乗りかご1と釣合い重り8を連結する主索13を巻上ることにより、乗りかご1、及び、釣合い重り8を昇降させる。巻上機2は、遮断回路6を介して交流電源7と繋がったインバータ5により駆動される。乗りかご1の走行中に、安全コントローラ50が、かごドアスイッチ90、乗場ドアスイッチ91〜93の作動を検出すると、遮断回路6が作動して巻上機2に供給される電源が断たれ、巻上機2の駆動が停止される。巻上機ブレーキ3は巻上機に対して常時作動状態にあるが、ブレーキ3に通電されている間だけ巻上機に対する制動力を解除する。
【0016】
乗りかご1と釣合い重り8とは、それぞれガバナ21,31と、乗りかごの把持装置28、釣合い重りの把持装置38を介して、ガバナロープ24,34とそれぞれ繋がっている。乗りかご1、釣合い重り8の移動に伴いガバナロープも移動し、これに伴いガバナ21,31は回転することにより乗りかご1と釣合い重り8トの速度を夫々調整する。
【0017】
ガバナ21(31)はガバナの把持装置23(33)を備える。乗りかご1、釣合い重り8が定格速度を超えて加速されると、ガバナの把持装置は、ガバナロープ24,34を把持し、さらに、非常止め装置25,35がガイドレール26,36を挟むことで、乗りかご1及び釣合い重り8が非常停止される。
【0018】
ファイナルリミットスイッチ11,12は、通常、オフ状態にあるが、乗りかご1が、終端階のレベルから下方、あるいは、上方へ進んだ場合、オン状態になり、遮断回路6と巻上機ブレーキ3とを作動させて巻上機2を停止させるとともに、終端階から下方、上又は方へ乗りかご1が行過ぎようとすることを防止する。
【0019】
乗りかご1の動作状態の検出器として、ガバナ21に取り付けられたエンコーダ22が存在する。同様に、釣合い重り8の動作状態の検出器として、ガバナ31に取り付けられたエンコーダ32も存在する。ガバナ21(31)の回転に伴いエンコーダ22(32)も回転し、エンコーダ22(32)からパルス信号が発生される。
【0020】
昇降路付近にあるエレベータの制御装置60は、制御コントローラ40と安全コントローラ50を備える。制御コントローラ0はかご内操作盤80、乗場ボタン81,82,83の入力信号を検出し、検出した信号を基にインバータ5を制御することで、乗りかご1の運行を制御する。制御コントローラ40は、さらに、パルス信号の変化により、乗りかご1及び釣合い重り8の移動距離、移動速度、移動方向を検出し、さらに、特定距離感知装置70、遮蔽板71,72,73により、各階床のドアゾーンを検出し、乗りかごを各階に停止させる。
【0021】
安全コントローラ50は、パルス信号の変化により、乗りかご1及び釣合い重り8の少なくとも一方の速度超過を検出し、さらに、ファイナルリミットスイッチ11,12を介して、乗りかご1が規定位置を超過したことを検出すると、これら検出値に基づいて、巻上機2の遮断回路6、巻上機ブレーキ3を作動させ、さらに、ガバナの把持装置23,33と非常止め装置25,35とを作動させて、乗りかご1及び釣合い重り8を非常停止させる。
【0022】
昇降路のピットには緩衝器27,37が設けられている。緩衝器27は、巻上機ブレーキ3、非常止め装置25の作動等によっても、乗りかご1が停止されない場合、少ない衝撃で乗りかご1を停止させる。緩衝器37は、ピットの下に居住スペースがある場合、非常止め装置35等が作動しても釣合い重り8が停止されない場合、釣合い重り8が居住スペースに突入することを防ぐためのものである。
【0023】
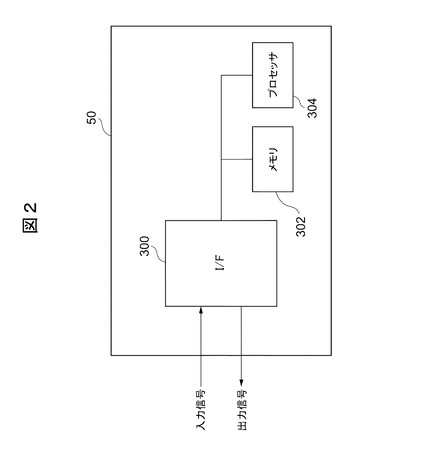
図2は、安全コントローラ50のハードウェアブロック図である。安全コントローラ50は、入力信号用と出力信号用それぞれのI/F(インタフェース)300と、後述のエレベータの安全運行管理プログラム(図3)及び同プログラムを実行するに必要な制御データを記録したメモリ302と、入力信号に基づいて、前記制御データを参照しつつ安全運行管理プログラムを実行して、出力信号を算出するためのプロセッサ(CPU)304とを備えている。
【0024】
入力信号として主たるものは、乗りかご用ガバナ21に設けられた第1のエンコーダ22からのパルス信号と、釣合い重り8用ガバナ31に設けられた第2のエンコーダ32からのパルス信号である。プロセッサは、これらパルス信号の変化等に基づいて、乗りかご及び釣合い重り夫々の進行方向、移動距離、移動速度等運行状況を算出し、算出結果から、主索の状態を迅速に判定する。
【0025】
主索の状態とは、主索の伸び、主索の縮み、主索の切断、又は、主索の絡み等である。主索に伸びがあっても、主索が切断に至らないものであれば、エレベータの安全運行上支障はないものであり、また、主索に縮みがあっても主索の絡みでなければ支障はないものである。
【0026】
プロセッサは、主索にエレベータの安全管理上の要請を越える状況が発生しているか、そのおそれがある場合、乗りかごを減速、通常停止、或いは、非常止めする。一方、安全管理上問題がない程度の伸び等が主索に生じていても、これを以って、乗りかごを停止させてしまう状態(エレベータの誤作動)を防止する。
【0027】
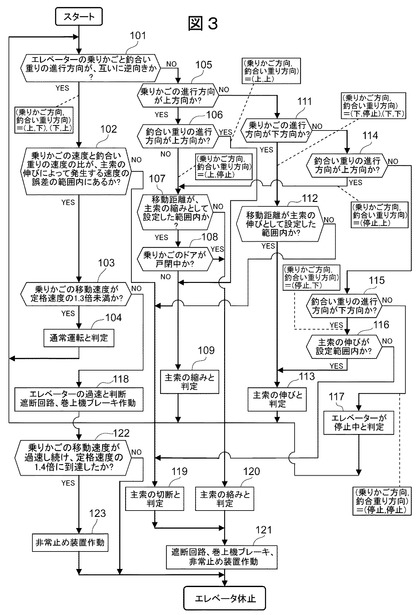
図3は、エレベータの安全運行管理プログラムのフローチャートである。このフローチャートは、安全コントローラ50によってエレベータが休止されるまで継続的に実行される。図3は、安全コントローラ50がエンコーダからの信号を検出した後、エレベータを休止するまでの処理の流れを示している。
【0028】
先ず、ステップ101において、乗りかご1、釣合い重り8の夫々のガバナ21(31)の回転によって回転するエンコーダ22,32からのパルス信号を基に、安全コントローラ50は、乗りかご1及び釣合い重り8のそれぞれの進行方向を判定する。
【0029】
安全コントローラ50が、乗りかご1と釣合い重り8が互いに逆方向、すなわち、乗りかご1が上方向に進み、釣合い重り8が下方向に進んでいる、または、乗りかご1が下方向に進み、釣合い重り8が上方向に進んでいる、と判定すると、ステップ102に進み、そうでない場合はステップ105に進む。
【0030】
ステップ102では、乗りかご1と釣り合い重り8とが互いに逆方向に進んでいる状態において、進行中に主索13が切断したかどうかを判定するため、エンコーダ22,32の出力パルス信号の変化に応じて、安全コントローラ50は、乗りかご1の移動速度と釣合い重り8の移動速度の比を求め、移動速度の比が、移動時の主索13の伸びによって発生する当該速度比の誤差として設定された範囲内にあるか否かを判定する。
【0031】
移動速度の比が誤差の範囲内であれば、ステップ103に進む。そうでない場合は、ステップ119に進み、安全コントローラ50は、主索13が切断したと判定し、ステップ121に進み、異常信号を、遮断回路6、巻上機ブレーキ3、及び、非常止め装置25、35に出力してこれらを作動させる。
【0032】
ステップ103では、互いに逆方向に進んでいる、乗りかご1と釣合い重り8に対して、エンコーダ22からのパルス信号の変化に応じて、安全コントローラ50は、乗りかご1の移動速度が定格速度の所定倍(1.3倍)未満であるかを判定する。乗りかご1の移動速度が定格速度の所定倍未満の場合はステップ104に進み、安全コントローラ50は、乗りかご1及び釣合い重り8ともに通常運転中にあると判定し、ステップ101に戻る。この間、制御コントローラ40は、エレベータの運行を継続する。
【0033】
乗りかご1の移動速度が定格速度の所定倍以上である場合は、ステップ118に移動して、安全コントローラ50は、エレベータが過速状態にあるとして、異常信号を出力する。そして、安全コントローラ50は、異常信号によって遮断回路6及び巻上機ブレーキ3を作動させた後、ステップ122に進む。
【0034】
ステップ122では、安全コントローラ50が、乗りかごの移動速度が定格速度越えた後、巻上機ブレーキ3、遮断回路6を作動(ステップ118)させた後でも、乗りかご1の移動速度が増加し続け、定格速度のさらに第2の所定倍(1.4倍)に到達したかを判定する。乗りかご1が定格速度の第2の所定倍に到達したと判定すると、ステップ123に進み、非常止め装置25,35を作動させることで、乗りかご25及び釣合い重り8を非常止めさせる。乗りかご1、釣合い重り8が非常止めされると、非常時の措置として、エレベータをそのまま休止させる。
【0035】
ステップ105では、エンコーダ22、32から出力された信号を基に、安全コントローラ50は、乗りかご1の進行方向、釣合い重り8の進行方向が互いに逆方向でなく、かつ乗りかご1の進行方向が上方向である判定すると、すなわち、乗りかご1が上方向に進み、釣合い重り8が停止中か上方向に進んでいる場合、ステップ106に進み、そうでない場合はステップ111に進む。
【0036】
ステップ106では、安全コントローラ50は、釣合い重り8の進行方向が上方向、すなわち、乗りかご1、釣合い重り8いずれも上方向に進んでいると検出すると、ステップ109に進み、安全コントローラ50は、主索13にエレベータの安全運行上問題がない縮みが発生しているにすぎないと判定してステップ101に戻る。乗りかご1が上方向、釣合い重り8が停止していると判定するとステップ107に移動する。
【0037】
ステップ107では、乗りかご1が上方向、釣合い重り8が停止している場合において、安全コントローラ50は、エンコーダ22からのパルス信号に基づいて乗りかご1の移動距離を主索13の縮みとして設定された安全の観点からの設定範囲内(数十センチ程度:10ms以下)にあるか否かを判定し、これを肯定するとステップ108に移動する。
【0038】
一方、安全コントローラ50は、ステップ107において、乗りかご1の移動距離が主索13の縮みとして設定された範囲(数十センチ程度)を越えると判定すると、ステップ120に進み、乗りかご1が上方向へ走行中に主索13が絡まったと判定して、ステップ121に進む。
【0039】
ステップ108では、乗りかご1が上方向、釣合い重り8が停止しており、かつ乗りかご1の移動距離が主索13の縮みとして設定された範囲内(数十センチ程度)である状態において、安全コントローラ50は、乗りかご1が戸閉中であるかを判定し、乗りかご1が戸閉中で無いと判定すると、乗りかご1内にいる乗客が乗りかご1から出たことで乗りかごが軽くなったことによる反動の結果主索13に縮みが生じたとして判定し(ステップ109)、次いで、ステップ101に戻る。この縮みは主索の絡みとは別でエレベータの運行上支障が無いものと判定される。
【0040】
乗りかご1が戸閉中である場合はステップ120に進み、安全コントローラ50は、乗りかごに対する乗客の乗降が無い無いにも拘わらず、主索に縮みが発生した、すなわち、主索が絡まったと判定して(ステップ120)、ステップ121に進む。
【0041】
ステップ111において、安全コントローラ50は、乗りかご1の進行方向が下方向であると検出すると、すなわち、乗りかご1の進行方向が下方向であり、釣合い重り8が停止中又はその進行方向が下方向である場合、ステップ112に進み、一方、乗りかご1が停止していると判定するとステップ114へ進む。
【0042】
ステップ112では、乗りかご1の進行方向が下方向、そして、釣合い重り8が停止中又はその進行方向が下方向である状態において、安全コントローラ50は、乗りかご1の移動距離が、主索13の伸びとして設定した範囲内(数十センチ程度)にあるかどうかを判定する。乗りかご1の移動距離が主索13の伸びとして設定した範囲内(数十センチ程度)にあると判定すると、ステップ113に進み、安全コントローラ50は、主索13に安全上支障が無い伸びが生じたに過ぎないと判定し、ステップ101に戻る。
【0043】
一方、安全コントローラ50は、釣合い重り8の移動距離が主索13の伸びとして設定した範囲(数十センチ程度)を越えていると判定すると、ステップ119に進み、安全コントローラ50にて主索13が切断したと判定してステップ121に進む。
【0044】
ステップ114では、乗りかご1が停止中である状態において、安全コントローラ50は、釣合い重り8の進行方向が上方向であると判定すると、ステップ107に移動し、主索の縮み、絡みを判定する。ステップ107にて移動距離を判別し、設定した範囲内(数十センチ程度)にある場合はステップ108に、設定した範囲内(数十センチ程度)にない場合はステップ120に移動し、主索の絡みと判定する。乗りかご1が下方向又は上方向に移動中に主索13に絡まり生じ、乗りかご1が停止したときに、釣合い重り8が跳ね上がったと判定し、異常信号を出力してステップ121に進む。
【0045】
安全コントローラ50は、乗りかご1が停止中で、釣合い重り8が停止中、またはその進行方向が下方向であると判定すると場合、ステップ114からステップ115に進み、釣合い重り8の進行方向が下方向であるか、停止中であるかを判別する。
【0046】
乗りかご1が停止中、釣合い重り8が下方向に進行していることを判定すると、ステップ115からステップ116に移動する。乗りかご1、釣合い重り8が共に停止中の場合、安全コントローラ50はステップ115からステップ117に進み、エレベータが停止中と判定した後ステップ101に戻る。
【0047】
ステップ116では、乗りかご1が停止中、釣合い重り8が下方向に進行している状態において、安全コントローラ50は、釣合い重り8の移動距離が、主索13の伸びとして設定した範囲内(数十センチ程度)にあるかどうかを判定する。移動距離が主索13の伸びとして設定した範囲内(数十センチ程度)にあると判定すると、ステップ113に進み、安全コントローラ50は主索13に通常の伸びが生じたに過ぎないと判定する。なお、安全コントローラが主索13の通常の伸びを検出すると、メンテナンス事業者はこの検出結果を主索のメンテナンスの計画に利用することができる。
【0048】
安全コントローラ50は、釣合い重り8の移動距離が主索13の伸びとして設定した範囲(数十センチ程度)を越えていると判定すると、ステップ119に進み、主索13が切断したことを判定してステップ121に進む。
【0049】
ステップ121では、安全コントローラ50は、遮断回路6、巻上機ブレーキ3に異常信号を出力してこれらを作動させる。これにより、乗りかごの把持装置28と釣合い重りの把持装置38を作動させることにより、非常止め装置25,35を作動させ、エレベータを休止状態に持っていく。
【0050】
既述の実施形態では、安全コントローラ50が、乗りかご1及び釣合い重り8の進行速度、移動距離が主索の伸びや縮みに対して設定された設定範囲を越えると、主索に切断、或いは、絡みが発生したとして、乗りかご及び釣合い重りを非常止めさせたが、設定範囲を複数の段階から構成させて、主索に切断、或いは、絡みが生じるおそれがあるとして乗りかご及び釣合い重りを減速、或いは、通常停止させる予防状態を設定してもよい。
【0051】
既述の実施形態では、昇降路のピット側に巻上機が設置された機械室レスエレベータを例としたが、屋上部に巻上機が取り付けられた機械室レスエレベータや、機械室があるエレベータにおいても、本発明を適用できることは勿論である。
【符号の説明】
【0052】
1 乗りかご
2 巻上機
3 巻上機ブレーキ
5 インバータ
6 遮断回路
7 交流電源
8 釣合い重り
11,12 ファイナルリミットスイッチ
13 主索
21,31 ガバナ
22,32 エンコーダ
23,33 ガバナの把持装置
24,34 ガバナロープ
25,35 非常止め装置
26,36 ガイドレール
27,37 緩衝器
28 乗りかごの把持装置
38 釣合い重りの把持装置
40 制御コントローラ
50 安全コントローラ
60 制御盤
70 特定距離感知装置
71,72,73 遮蔽板
80 かご内操作盤
81,82,83 乗場ボタン
90 かごドアスイッチ
91,92,93 乗場ドアスイッチ
【技術分野】
【0001】
本発明は、エレベータの運行管理システムに係り、特に、乗りかごと釣合い重りとを連結する主索の状態を判定し、この判定結果に応じて、乗りかごの安全運行を制御することを内容とするエレベータの安全運行管理システムに関するものである。
【背景技術】
【0002】
従来から、エレベータには、乗りかごを安全に運行するための制御装置が設けられている。この種の制御装置として、例えば、特開2004−107075号公報に、昇降かごの移動状態が、上下のシーブ間に調速ワイヤーを巻き掛けた構成の調速装置により監視され、昇降かごの異常落下を検出した際に非常止め装置を動作させる構成としたエレベータ等の昇降機械に設けられた異常検出機構が開示されている。
【0003】
この異常検出機構は、通常のエレベータにおいて用いられている非常止め装置が、無重力状態を体感させるための、昇降かごを自由落下と同様な状態で下降させるようにした遊戯施設の昇降機械に適用されようとした場合、昇降かごが、正常動作における自由落下をしているのか、メインロープの切断等の異常により落下しているのかを判別することはできないことを解決するために、調速装置による調速機構を次のように構成している。
【0004】
昇降かご側とカウンタウェイト側の上部のシーブを、夫々近接させて共通回転軸に回転自在に設け、共通回転軸に左右のシーブ間においてストッパー装置を回転自在に設けると共に、ストッパー装置には共通回転軸に対して進退可能にストッパーねじを設け、夫々のシーブの対向面に環状ラック部を形成すると共に、これらのラックに歯合させた差動ギアをストッパーねじに固定する。
【0005】
メインロープが切断されるといった異常が発生すると、昇降かごとカウンタウェイトは、夫々独立に自由落下する。すると、昇降かご側の調速ワイヤーとカウンタウェイト側の調速ワイヤーは、正常動作の場合とは逆の方向に移動することになり、夫々のシーブも逆方向に回転する。
【0006】
夫々のシーブが逆方向に回転すると、それらのラックに歯合している差動ギアが回転して、ストッパーねじの先端が共通回転軸の外周に圧接して、共通回転軸の回転が不能になる。その結果、非常止め用レバーが調速ワイヤーにより引き上げられることにより非常止め装置が動作し、非常止め用のくさびがガイドレール4に食い込むことにより、昇降かごの落下が阻止される。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2004−107075
【発明の概要】
【発明が解決しようとする課題】
【0008】
既述の従来技術に係る異常検出機構は、かごと釣合い重りの荷重による主索の伸びについて配慮していないために、主索にエレベータの安全運行上支障が無い程度の伸びが発生したに過ぎない場合であっても、これを主索の切断と区別することができず、直ちに、差動ギアを動作させてしまい非常止め装置の誤作動をさせてしまうといった課題があった。一方、非常止め装置の誤作動を防止するために、主索の伸びによる影響がないように、異常検出装置を動作させようとすると、勢い、主索の切断が見逃されてしまうおそれもある。
【0009】
そこで、本発明は、主索の状態の如何に拘わらず、非常止め装置の誤作動を伴うことなく、エレベータの安全運行管理を継続できるシステムを提供することを目的とする。
【課題を解決するための手段】
【0010】
前記目的を達成するために、本発明に係るエレベータの運行管理システムは、乗りかごと釣合い重りとの運行状況から主索の状態を判定し、判定された主索の状態に応じて、非常止め装置を誤作動させることなく、エレベータの安全運行を継続できることを特徴とするものである。
【0011】
本発明に係るエレベータの運行管理システムによれば、主索の状態を判定することができるために、主索に伸びや縮み等が発生しただけで非常止め装置を誤停止させてしまうことを防止しながら、エレベータの安全運行管理を継続することができる。
【発明の効果】
【0012】
本発明によれば、主索の状態の如何に拘わらず、非常止め装置の誤作動を伴うことなく、エレベータの安全運行管理を継続できるエレベータの運行管理システムを提供することができる。
【図面の簡単な説明】
【0013】
【図1】本発明に係る、エレベータの運行管理システムの実施形態のブロック構成図である。
【図2】エレベータの運行管理システムに設けられた、エレベータの安全運行を管理する安全コントローラのブロック構成図である。
【図3】安全コントローラの動作の一例を示すフローチャートである。
【発明を実施するための形態】
【0014】
図1は、エレベータの運行管理システムの実施形態に係るブロック図である。エレベータとして、屋上に機械室を必要としない、機械室レスと呼ばれるタイプのものを例にして説明する。このタイプのエレベータでは、巻上機、制御盤は昇降路内に配置されている。
【0015】
巻上機2は、乗りかご1と釣合い重り8を連結する主索13を巻上ることにより、乗りかご1、及び、釣合い重り8を昇降させる。巻上機2は、遮断回路6を介して交流電源7と繋がったインバータ5により駆動される。乗りかご1の走行中に、安全コントローラ50が、かごドアスイッチ90、乗場ドアスイッチ91〜93の作動を検出すると、遮断回路6が作動して巻上機2に供給される電源が断たれ、巻上機2の駆動が停止される。巻上機ブレーキ3は巻上機に対して常時作動状態にあるが、ブレーキ3に通電されている間だけ巻上機に対する制動力を解除する。
【0016】
乗りかご1と釣合い重り8とは、それぞれガバナ21,31と、乗りかごの把持装置28、釣合い重りの把持装置38を介して、ガバナロープ24,34とそれぞれ繋がっている。乗りかご1、釣合い重り8の移動に伴いガバナロープも移動し、これに伴いガバナ21,31は回転することにより乗りかご1と釣合い重り8トの速度を夫々調整する。
【0017】
ガバナ21(31)はガバナの把持装置23(33)を備える。乗りかご1、釣合い重り8が定格速度を超えて加速されると、ガバナの把持装置は、ガバナロープ24,34を把持し、さらに、非常止め装置25,35がガイドレール26,36を挟むことで、乗りかご1及び釣合い重り8が非常停止される。
【0018】
ファイナルリミットスイッチ11,12は、通常、オフ状態にあるが、乗りかご1が、終端階のレベルから下方、あるいは、上方へ進んだ場合、オン状態になり、遮断回路6と巻上機ブレーキ3とを作動させて巻上機2を停止させるとともに、終端階から下方、上又は方へ乗りかご1が行過ぎようとすることを防止する。
【0019】
乗りかご1の動作状態の検出器として、ガバナ21に取り付けられたエンコーダ22が存在する。同様に、釣合い重り8の動作状態の検出器として、ガバナ31に取り付けられたエンコーダ32も存在する。ガバナ21(31)の回転に伴いエンコーダ22(32)も回転し、エンコーダ22(32)からパルス信号が発生される。
【0020】
昇降路付近にあるエレベータの制御装置60は、制御コントローラ40と安全コントローラ50を備える。制御コントローラ0はかご内操作盤80、乗場ボタン81,82,83の入力信号を検出し、検出した信号を基にインバータ5を制御することで、乗りかご1の運行を制御する。制御コントローラ40は、さらに、パルス信号の変化により、乗りかご1及び釣合い重り8の移動距離、移動速度、移動方向を検出し、さらに、特定距離感知装置70、遮蔽板71,72,73により、各階床のドアゾーンを検出し、乗りかごを各階に停止させる。
【0021】
安全コントローラ50は、パルス信号の変化により、乗りかご1及び釣合い重り8の少なくとも一方の速度超過を検出し、さらに、ファイナルリミットスイッチ11,12を介して、乗りかご1が規定位置を超過したことを検出すると、これら検出値に基づいて、巻上機2の遮断回路6、巻上機ブレーキ3を作動させ、さらに、ガバナの把持装置23,33と非常止め装置25,35とを作動させて、乗りかご1及び釣合い重り8を非常停止させる。
【0022】
昇降路のピットには緩衝器27,37が設けられている。緩衝器27は、巻上機ブレーキ3、非常止め装置25の作動等によっても、乗りかご1が停止されない場合、少ない衝撃で乗りかご1を停止させる。緩衝器37は、ピットの下に居住スペースがある場合、非常止め装置35等が作動しても釣合い重り8が停止されない場合、釣合い重り8が居住スペースに突入することを防ぐためのものである。
【0023】
図2は、安全コントローラ50のハードウェアブロック図である。安全コントローラ50は、入力信号用と出力信号用それぞれのI/F(インタフェース)300と、後述のエレベータの安全運行管理プログラム(図3)及び同プログラムを実行するに必要な制御データを記録したメモリ302と、入力信号に基づいて、前記制御データを参照しつつ安全運行管理プログラムを実行して、出力信号を算出するためのプロセッサ(CPU)304とを備えている。
【0024】
入力信号として主たるものは、乗りかご用ガバナ21に設けられた第1のエンコーダ22からのパルス信号と、釣合い重り8用ガバナ31に設けられた第2のエンコーダ32からのパルス信号である。プロセッサは、これらパルス信号の変化等に基づいて、乗りかご及び釣合い重り夫々の進行方向、移動距離、移動速度等運行状況を算出し、算出結果から、主索の状態を迅速に判定する。
【0025】
主索の状態とは、主索の伸び、主索の縮み、主索の切断、又は、主索の絡み等である。主索に伸びがあっても、主索が切断に至らないものであれば、エレベータの安全運行上支障はないものであり、また、主索に縮みがあっても主索の絡みでなければ支障はないものである。
【0026】
プロセッサは、主索にエレベータの安全管理上の要請を越える状況が発生しているか、そのおそれがある場合、乗りかごを減速、通常停止、或いは、非常止めする。一方、安全管理上問題がない程度の伸び等が主索に生じていても、これを以って、乗りかごを停止させてしまう状態(エレベータの誤作動)を防止する。
【0027】
図3は、エレベータの安全運行管理プログラムのフローチャートである。このフローチャートは、安全コントローラ50によってエレベータが休止されるまで継続的に実行される。図3は、安全コントローラ50がエンコーダからの信号を検出した後、エレベータを休止するまでの処理の流れを示している。
【0028】
先ず、ステップ101において、乗りかご1、釣合い重り8の夫々のガバナ21(31)の回転によって回転するエンコーダ22,32からのパルス信号を基に、安全コントローラ50は、乗りかご1及び釣合い重り8のそれぞれの進行方向を判定する。
【0029】
安全コントローラ50が、乗りかご1と釣合い重り8が互いに逆方向、すなわち、乗りかご1が上方向に進み、釣合い重り8が下方向に進んでいる、または、乗りかご1が下方向に進み、釣合い重り8が上方向に進んでいる、と判定すると、ステップ102に進み、そうでない場合はステップ105に進む。
【0030】
ステップ102では、乗りかご1と釣り合い重り8とが互いに逆方向に進んでいる状態において、進行中に主索13が切断したかどうかを判定するため、エンコーダ22,32の出力パルス信号の変化に応じて、安全コントローラ50は、乗りかご1の移動速度と釣合い重り8の移動速度の比を求め、移動速度の比が、移動時の主索13の伸びによって発生する当該速度比の誤差として設定された範囲内にあるか否かを判定する。
【0031】
移動速度の比が誤差の範囲内であれば、ステップ103に進む。そうでない場合は、ステップ119に進み、安全コントローラ50は、主索13が切断したと判定し、ステップ121に進み、異常信号を、遮断回路6、巻上機ブレーキ3、及び、非常止め装置25、35に出力してこれらを作動させる。
【0032】
ステップ103では、互いに逆方向に進んでいる、乗りかご1と釣合い重り8に対して、エンコーダ22からのパルス信号の変化に応じて、安全コントローラ50は、乗りかご1の移動速度が定格速度の所定倍(1.3倍)未満であるかを判定する。乗りかご1の移動速度が定格速度の所定倍未満の場合はステップ104に進み、安全コントローラ50は、乗りかご1及び釣合い重り8ともに通常運転中にあると判定し、ステップ101に戻る。この間、制御コントローラ40は、エレベータの運行を継続する。
【0033】
乗りかご1の移動速度が定格速度の所定倍以上である場合は、ステップ118に移動して、安全コントローラ50は、エレベータが過速状態にあるとして、異常信号を出力する。そして、安全コントローラ50は、異常信号によって遮断回路6及び巻上機ブレーキ3を作動させた後、ステップ122に進む。
【0034】
ステップ122では、安全コントローラ50が、乗りかごの移動速度が定格速度越えた後、巻上機ブレーキ3、遮断回路6を作動(ステップ118)させた後でも、乗りかご1の移動速度が増加し続け、定格速度のさらに第2の所定倍(1.4倍)に到達したかを判定する。乗りかご1が定格速度の第2の所定倍に到達したと判定すると、ステップ123に進み、非常止め装置25,35を作動させることで、乗りかご25及び釣合い重り8を非常止めさせる。乗りかご1、釣合い重り8が非常止めされると、非常時の措置として、エレベータをそのまま休止させる。
【0035】
ステップ105では、エンコーダ22、32から出力された信号を基に、安全コントローラ50は、乗りかご1の進行方向、釣合い重り8の進行方向が互いに逆方向でなく、かつ乗りかご1の進行方向が上方向である判定すると、すなわち、乗りかご1が上方向に進み、釣合い重り8が停止中か上方向に進んでいる場合、ステップ106に進み、そうでない場合はステップ111に進む。
【0036】
ステップ106では、安全コントローラ50は、釣合い重り8の進行方向が上方向、すなわち、乗りかご1、釣合い重り8いずれも上方向に進んでいると検出すると、ステップ109に進み、安全コントローラ50は、主索13にエレベータの安全運行上問題がない縮みが発生しているにすぎないと判定してステップ101に戻る。乗りかご1が上方向、釣合い重り8が停止していると判定するとステップ107に移動する。
【0037】
ステップ107では、乗りかご1が上方向、釣合い重り8が停止している場合において、安全コントローラ50は、エンコーダ22からのパルス信号に基づいて乗りかご1の移動距離を主索13の縮みとして設定された安全の観点からの設定範囲内(数十センチ程度:10ms以下)にあるか否かを判定し、これを肯定するとステップ108に移動する。
【0038】
一方、安全コントローラ50は、ステップ107において、乗りかご1の移動距離が主索13の縮みとして設定された範囲(数十センチ程度)を越えると判定すると、ステップ120に進み、乗りかご1が上方向へ走行中に主索13が絡まったと判定して、ステップ121に進む。
【0039】
ステップ108では、乗りかご1が上方向、釣合い重り8が停止しており、かつ乗りかご1の移動距離が主索13の縮みとして設定された範囲内(数十センチ程度)である状態において、安全コントローラ50は、乗りかご1が戸閉中であるかを判定し、乗りかご1が戸閉中で無いと判定すると、乗りかご1内にいる乗客が乗りかご1から出たことで乗りかごが軽くなったことによる反動の結果主索13に縮みが生じたとして判定し(ステップ109)、次いで、ステップ101に戻る。この縮みは主索の絡みとは別でエレベータの運行上支障が無いものと判定される。
【0040】
乗りかご1が戸閉中である場合はステップ120に進み、安全コントローラ50は、乗りかごに対する乗客の乗降が無い無いにも拘わらず、主索に縮みが発生した、すなわち、主索が絡まったと判定して(ステップ120)、ステップ121に進む。
【0041】
ステップ111において、安全コントローラ50は、乗りかご1の進行方向が下方向であると検出すると、すなわち、乗りかご1の進行方向が下方向であり、釣合い重り8が停止中又はその進行方向が下方向である場合、ステップ112に進み、一方、乗りかご1が停止していると判定するとステップ114へ進む。
【0042】
ステップ112では、乗りかご1の進行方向が下方向、そして、釣合い重り8が停止中又はその進行方向が下方向である状態において、安全コントローラ50は、乗りかご1の移動距離が、主索13の伸びとして設定した範囲内(数十センチ程度)にあるかどうかを判定する。乗りかご1の移動距離が主索13の伸びとして設定した範囲内(数十センチ程度)にあると判定すると、ステップ113に進み、安全コントローラ50は、主索13に安全上支障が無い伸びが生じたに過ぎないと判定し、ステップ101に戻る。
【0043】
一方、安全コントローラ50は、釣合い重り8の移動距離が主索13の伸びとして設定した範囲(数十センチ程度)を越えていると判定すると、ステップ119に進み、安全コントローラ50にて主索13が切断したと判定してステップ121に進む。
【0044】
ステップ114では、乗りかご1が停止中である状態において、安全コントローラ50は、釣合い重り8の進行方向が上方向であると判定すると、ステップ107に移動し、主索の縮み、絡みを判定する。ステップ107にて移動距離を判別し、設定した範囲内(数十センチ程度)にある場合はステップ108に、設定した範囲内(数十センチ程度)にない場合はステップ120に移動し、主索の絡みと判定する。乗りかご1が下方向又は上方向に移動中に主索13に絡まり生じ、乗りかご1が停止したときに、釣合い重り8が跳ね上がったと判定し、異常信号を出力してステップ121に進む。
【0045】
安全コントローラ50は、乗りかご1が停止中で、釣合い重り8が停止中、またはその進行方向が下方向であると判定すると場合、ステップ114からステップ115に進み、釣合い重り8の進行方向が下方向であるか、停止中であるかを判別する。
【0046】
乗りかご1が停止中、釣合い重り8が下方向に進行していることを判定すると、ステップ115からステップ116に移動する。乗りかご1、釣合い重り8が共に停止中の場合、安全コントローラ50はステップ115からステップ117に進み、エレベータが停止中と判定した後ステップ101に戻る。
【0047】
ステップ116では、乗りかご1が停止中、釣合い重り8が下方向に進行している状態において、安全コントローラ50は、釣合い重り8の移動距離が、主索13の伸びとして設定した範囲内(数十センチ程度)にあるかどうかを判定する。移動距離が主索13の伸びとして設定した範囲内(数十センチ程度)にあると判定すると、ステップ113に進み、安全コントローラ50は主索13に通常の伸びが生じたに過ぎないと判定する。なお、安全コントローラが主索13の通常の伸びを検出すると、メンテナンス事業者はこの検出結果を主索のメンテナンスの計画に利用することができる。
【0048】
安全コントローラ50は、釣合い重り8の移動距離が主索13の伸びとして設定した範囲(数十センチ程度)を越えていると判定すると、ステップ119に進み、主索13が切断したことを判定してステップ121に進む。
【0049】
ステップ121では、安全コントローラ50は、遮断回路6、巻上機ブレーキ3に異常信号を出力してこれらを作動させる。これにより、乗りかごの把持装置28と釣合い重りの把持装置38を作動させることにより、非常止め装置25,35を作動させ、エレベータを休止状態に持っていく。
【0050】
既述の実施形態では、安全コントローラ50が、乗りかご1及び釣合い重り8の進行速度、移動距離が主索の伸びや縮みに対して設定された設定範囲を越えると、主索に切断、或いは、絡みが発生したとして、乗りかご及び釣合い重りを非常止めさせたが、設定範囲を複数の段階から構成させて、主索に切断、或いは、絡みが生じるおそれがあるとして乗りかご及び釣合い重りを減速、或いは、通常停止させる予防状態を設定してもよい。
【0051】
既述の実施形態では、昇降路のピット側に巻上機が設置された機械室レスエレベータを例としたが、屋上部に巻上機が取り付けられた機械室レスエレベータや、機械室があるエレベータにおいても、本発明を適用できることは勿論である。
【符号の説明】
【0052】
1 乗りかご
2 巻上機
3 巻上機ブレーキ
5 インバータ
6 遮断回路
7 交流電源
8 釣合い重り
11,12 ファイナルリミットスイッチ
13 主索
21,31 ガバナ
22,32 エンコーダ
23,33 ガバナの把持装置
24,34 ガバナロープ
25,35 非常止め装置
26,36 ガイドレール
27,37 緩衝器
28 乗りかごの把持装置
38 釣合い重りの把持装置
40 制御コントローラ
50 安全コントローラ
60 制御盤
70 特定距離感知装置
71,72,73 遮蔽板
80 かご内操作盤
81,82,83 乗場ボタン
90 かごドアスイッチ
91,92,93 乗場ドアスイッチ
【特許請求の範囲】
【請求項1】
乗りかごの安全運行を制御するコントローラを備えるエレベータの運行管理システムであって、
前記コントローラは、
前記乗りかごの動作状態から得られた第1の検出信号と、前記乗りかごに対する釣合い重りの動作状態から得られた第2の検出信号と、が入力される入力回路と、
前記第1の検出信号と前記第2の検出信号とに基づいて、前記乗りかご及び前記釣合い重りの運行状況を算出し、当該運行状況と、前記主索の状態とに応じて設定された設定値とを比較し、当該比較結果に基づいて、前記乗りかごを制動するための制動装置に対する作動信号を形成する制御回路と、
前記作動信号を前記制動装置に出力する、出力回路と、
を備える、
エレベータの運行管理システム。
【請求項2】
前記コントローラは、
前記第1の検出信号を前記乗りかごに対応する第1のガバナに設けられた第1のエンコーダから得ると共に、前記第2の検出信号を前記釣合い重りに対応する第2のガバナに設けられた第2のエンコーダから得、
前記第1の検出信号と前記第2の検出信号に基づいて、前記乗りかごと前記釣り合い重り夫々について、その進行方向、その移動速度、そして、その移動距離の少なくとも一つを前記運行状況として算出する、請求項1記載のエレベータの運行管理システム。
【請求項3】
前記コントローラは、
前記算出された前記運行状況と前記主策の伸びに対応して設定された前記設定値とを比較し、
前記算出された前記運行状況が前記設定値の範囲内にあると判定すると、前記主策に切断はないとして、前記乗りかごの運行を継続し、
前記算出された前記運行状況が前記設定値の範囲内にないと判定すると、前記主策が切断されたと判定して、前記乗りかごを非常止めするための前記作動信号を形成する、請求項2記載のエレベータの運行管理システム。
【請求項4】
前記コントローラは、前記算出された前記運行状況と前記主策の縮みに対応して設定された前記設定値とを比較し、
前記算出された前記運行状況が前記設定値の範囲内にあると判定すると、前記主策に絡みはないとして、前記乗りかごの運行を継続し、
前記算出された前記運行状況が前記設定値の範囲内にないと判定すると、前記主策に絡みが生じたと判定して、前記乗りかごを非常止めするための前記作動信号を形成する、請求項2記載のエレベータの運行管理システム。
【請求項5】
前記コントローラは、
前記算出された運行状況に基づいて、前記乗りかごと前記釣り合い重りの進行方向が互いに逆向きであり、前記乗りかごの移動速度と前記釣り合い重りの移動速度との比が前記主策の伸びに対して設定された前記設定値の範囲内にあり、前記乗りかごの進行速度が定格速度の所定倍未満以下であることを判定すると、
前記乗りかごは通常運転状態にあるとして、前記乗りかごを非常停止させることなく、当該乗りかごの運行を継続する、請求項3記載のエレベータの運行管理システム。
【請求項6】
前記コントローラは、
前記算出された運行状況に基づいて、前記乗りかごと前記釣り合い重りの進行方向が互いに逆向きであり、前記乗りかごの移動速度と前記釣り合い重りの移動速度との比が前記主策の伸びに対して設定された前記設定値の範囲内にないと判定すると、
前記主索が切断されたとして、前記乗りかごを非常止めするための前記作動信号を形成する、請求項3記載のエレベータの運行管理システム。
【請求項7】
前記コントローラは、
前記算出された運行状況に基づいて、前記乗りかごが上方向に進行し、前記釣合い重りが停止しており、前記乗りかごの移動距離が前記主策の縮みに対して設定された前記設定値の範囲内にあり、前記乗りかごのドアが戸閉中でないと判定すると、
前記主索には絡みがないとして、前記乗りかごを非常止めすることなく、当該乗りかごの運行を継続する、請求項4記載のエレベータの運行管理システム。
【請求項8】
前記コントローラは、
前記算出された運行状況に基づいて、前記乗りかごが上方向に進行し、前記釣合い重りが停止しており、前記乗りかごの移動距離が前記主策の縮みに対して設定された前記設定値の範囲内にないことを判定すると、
前記主索に前記絡みがあるとして、前記乗りかごを非常止めするための前記作動信号を形成する、請求項4記載のエレベータの運行管理システム。
【請求項9】
前記コントローラは、
前記算出された運行状況に基づいて、前記乗りかごが上方向に進行し、前記釣合い重りが停止しており、前記乗りかごの移動距離が前記主策の縮みに対して設定された前記設定値の範囲内にあり、前記乗りかごのドアが戸閉中であると判定すると、
前記主索に前記絡みがあるとして、前記乗りかごを非常止めするための前記作動信号を形成する、請求項4記載のエレベータの運行管理システム。
【請求項10】
前記コントローラは、
前記算出された運行状況に基づいて、前記乗りかごが下方向に進行し、前記釣合い重りが下方向に進行しているか又は停止しており、前記乗りかごの移動距離が前記主策の緩みに対して設定された前記設定値の範囲内にあると判定すると、
前記主索は切断状態にないとして、前記乗りかごを非常止めすることなく、当該乗りかごの運行を継続する、請求項3記載のエレベータの運行管理システム。
【請求項11】
前記コントローラは、
前記算出された運行状況に基づいて、前記乗りかごが下方向に進行し、前記釣合い重りが下方向に進行しているか又は停止しており、前記乗りかごの移動距離が前記主策の緩みに対して設定された前記設定値の範囲内にないと判定すると、
前記主索が切断されたとして、前記乗りかごを非常止めするための前記作動信号を形成する、請求項3記載のエレベータの運行管理システム。
【請求項12】
前記コントローラは、
前記算出された運行状況に基づいて、前記乗りかごが停止しており、前記釣合い重りが上方向に進行していると判定すると、
前記主索に絡みが生じたとして、前記乗りかごを非常止めするための前記作動信号を形成する、請求項2記載のエレベータの運行管理システム。
【請求項13】
前記コントローラは、
前記算出された運行状況に基づいて、前記乗りかごが停止しており、前記釣合い重りが下方向に進行し、前記釣合い重りの移動距離が前記設定値の範囲内にあると判定すると、
前記主策に切断はないとして、前記乗りかごの運行を継続する、請求項3記載のエレベータの運行管理システム。
【請求項14】
前記算出された運行状況に基づいて、前記乗りかごが停止しており、前記釣合い重りが下方向に進行し、前記釣合い重りの移動距離が前記設定値の範囲内にないと判定すると、
前記主策が切断されたとして、前記乗りかごを非常止めするための前記作動信号を形成する、請求項3記載のエレベータの運行管理システム。
【請求項1】
乗りかごの安全運行を制御するコントローラを備えるエレベータの運行管理システムであって、
前記コントローラは、
前記乗りかごの動作状態から得られた第1の検出信号と、前記乗りかごに対する釣合い重りの動作状態から得られた第2の検出信号と、が入力される入力回路と、
前記第1の検出信号と前記第2の検出信号とに基づいて、前記乗りかご及び前記釣合い重りの運行状況を算出し、当該運行状況と、前記主索の状態とに応じて設定された設定値とを比較し、当該比較結果に基づいて、前記乗りかごを制動するための制動装置に対する作動信号を形成する制御回路と、
前記作動信号を前記制動装置に出力する、出力回路と、
を備える、
エレベータの運行管理システム。
【請求項2】
前記コントローラは、
前記第1の検出信号を前記乗りかごに対応する第1のガバナに設けられた第1のエンコーダから得ると共に、前記第2の検出信号を前記釣合い重りに対応する第2のガバナに設けられた第2のエンコーダから得、
前記第1の検出信号と前記第2の検出信号に基づいて、前記乗りかごと前記釣り合い重り夫々について、その進行方向、その移動速度、そして、その移動距離の少なくとも一つを前記運行状況として算出する、請求項1記載のエレベータの運行管理システム。
【請求項3】
前記コントローラは、
前記算出された前記運行状況と前記主策の伸びに対応して設定された前記設定値とを比較し、
前記算出された前記運行状況が前記設定値の範囲内にあると判定すると、前記主策に切断はないとして、前記乗りかごの運行を継続し、
前記算出された前記運行状況が前記設定値の範囲内にないと判定すると、前記主策が切断されたと判定して、前記乗りかごを非常止めするための前記作動信号を形成する、請求項2記載のエレベータの運行管理システム。
【請求項4】
前記コントローラは、前記算出された前記運行状況と前記主策の縮みに対応して設定された前記設定値とを比較し、
前記算出された前記運行状況が前記設定値の範囲内にあると判定すると、前記主策に絡みはないとして、前記乗りかごの運行を継続し、
前記算出された前記運行状況が前記設定値の範囲内にないと判定すると、前記主策に絡みが生じたと判定して、前記乗りかごを非常止めするための前記作動信号を形成する、請求項2記載のエレベータの運行管理システム。
【請求項5】
前記コントローラは、
前記算出された運行状況に基づいて、前記乗りかごと前記釣り合い重りの進行方向が互いに逆向きであり、前記乗りかごの移動速度と前記釣り合い重りの移動速度との比が前記主策の伸びに対して設定された前記設定値の範囲内にあり、前記乗りかごの進行速度が定格速度の所定倍未満以下であることを判定すると、
前記乗りかごは通常運転状態にあるとして、前記乗りかごを非常停止させることなく、当該乗りかごの運行を継続する、請求項3記載のエレベータの運行管理システム。
【請求項6】
前記コントローラは、
前記算出された運行状況に基づいて、前記乗りかごと前記釣り合い重りの進行方向が互いに逆向きであり、前記乗りかごの移動速度と前記釣り合い重りの移動速度との比が前記主策の伸びに対して設定された前記設定値の範囲内にないと判定すると、
前記主索が切断されたとして、前記乗りかごを非常止めするための前記作動信号を形成する、請求項3記載のエレベータの運行管理システム。
【請求項7】
前記コントローラは、
前記算出された運行状況に基づいて、前記乗りかごが上方向に進行し、前記釣合い重りが停止しており、前記乗りかごの移動距離が前記主策の縮みに対して設定された前記設定値の範囲内にあり、前記乗りかごのドアが戸閉中でないと判定すると、
前記主索には絡みがないとして、前記乗りかごを非常止めすることなく、当該乗りかごの運行を継続する、請求項4記載のエレベータの運行管理システム。
【請求項8】
前記コントローラは、
前記算出された運行状況に基づいて、前記乗りかごが上方向に進行し、前記釣合い重りが停止しており、前記乗りかごの移動距離が前記主策の縮みに対して設定された前記設定値の範囲内にないことを判定すると、
前記主索に前記絡みがあるとして、前記乗りかごを非常止めするための前記作動信号を形成する、請求項4記載のエレベータの運行管理システム。
【請求項9】
前記コントローラは、
前記算出された運行状況に基づいて、前記乗りかごが上方向に進行し、前記釣合い重りが停止しており、前記乗りかごの移動距離が前記主策の縮みに対して設定された前記設定値の範囲内にあり、前記乗りかごのドアが戸閉中であると判定すると、
前記主索に前記絡みがあるとして、前記乗りかごを非常止めするための前記作動信号を形成する、請求項4記載のエレベータの運行管理システム。
【請求項10】
前記コントローラは、
前記算出された運行状況に基づいて、前記乗りかごが下方向に進行し、前記釣合い重りが下方向に進行しているか又は停止しており、前記乗りかごの移動距離が前記主策の緩みに対して設定された前記設定値の範囲内にあると判定すると、
前記主索は切断状態にないとして、前記乗りかごを非常止めすることなく、当該乗りかごの運行を継続する、請求項3記載のエレベータの運行管理システム。
【請求項11】
前記コントローラは、
前記算出された運行状況に基づいて、前記乗りかごが下方向に進行し、前記釣合い重りが下方向に進行しているか又は停止しており、前記乗りかごの移動距離が前記主策の緩みに対して設定された前記設定値の範囲内にないと判定すると、
前記主索が切断されたとして、前記乗りかごを非常止めするための前記作動信号を形成する、請求項3記載のエレベータの運行管理システム。
【請求項12】
前記コントローラは、
前記算出された運行状況に基づいて、前記乗りかごが停止しており、前記釣合い重りが上方向に進行していると判定すると、
前記主索に絡みが生じたとして、前記乗りかごを非常止めするための前記作動信号を形成する、請求項2記載のエレベータの運行管理システム。
【請求項13】
前記コントローラは、
前記算出された運行状況に基づいて、前記乗りかごが停止しており、前記釣合い重りが下方向に進行し、前記釣合い重りの移動距離が前記設定値の範囲内にあると判定すると、
前記主策に切断はないとして、前記乗りかごの運行を継続する、請求項3記載のエレベータの運行管理システム。
【請求項14】
前記算出された運行状況に基づいて、前記乗りかごが停止しており、前記釣合い重りが下方向に進行し、前記釣合い重りの移動距離が前記設定値の範囲内にないと判定すると、
前記主策が切断されたとして、前記乗りかごを非常止めするための前記作動信号を形成する、請求項3記載のエレベータの運行管理システム。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−112464(P2013−112464A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−259603(P2011−259603)
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]