
エレベータドアの点検装置およびエレベータドアの点検方法
【課題】エレベータのドア開閉時の異常を精度よく検出する。
【解決手段】エレベータドアの開閉異常を検出するための装置であって、一定速度の点検用速度により駆動モータ(1)を速度制御することで開閉異常点検時におけるドアの開閉動作を制御するドア制御部(21)と、ドア制御部による開閉動作中における駆動モータの実速度を所定のサンプリング間隔で抽出し、抽出した実速度と点検用速度との偏差を求め、開閉動作中の所定の点検区間における偏差の絶対値を積算することで速度偏差積算値を算出し、速度偏差積算値が所定の基準値を超えた場合にエレベータドアの開閉異常が発生したと判断する点検部(22)とを備える。
【解決手段】エレベータドアの開閉異常を検出するための装置であって、一定速度の点検用速度により駆動モータ(1)を速度制御することで開閉異常点検時におけるドアの開閉動作を制御するドア制御部(21)と、ドア制御部による開閉動作中における駆動モータの実速度を所定のサンプリング間隔で抽出し、抽出した実速度と点検用速度との偏差を求め、開閉動作中の所定の点検区間における偏差の絶対値を積算することで速度偏差積算値を算出し、速度偏差積算値が所定の基準値を超えた場合にエレベータドアの開閉異常が発生したと判断する点検部(22)とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ゴミづまり等によるエレベータドアの開閉時の異常を、点検時における速度応答結果に基づいて精度よく検出するエレベータドアの点検装置およびエレベータドアの点検方法に関する。
【背景技術】
【0002】
ゴミづまり等による戸開閉不良を検出するための従来のエレベータドアの異常検出方法では、以下のような制御を行っている。まず始めに、低速度のドア点検用速度指令により制御されるモータで開閉動作を行い、このときのドア動作経過とともに変化するモータ速度とドア点検用速度指令との偏差を求める。そして、この速度偏差とあらかじめメモリに記憶しておいた基準偏差とを比較し、この比較結果の差が規定範囲内にないときには、ドアに異常があると判断していた(例えば、特許文献1参照)。
【0003】
また、従来のエレベータドアの別の異常検出方法では、ドアの開閉にかかる時間を計り、この開閉時間があらかじめ設定されていた基準時間内であるか否かで、ドアの異常の有無を判断していた(例えば、特許文献2参照)。
【0004】
また、従来のエレベータドアのさらに別の異常検出方法では、ドアの経年変化や各階床で異なる乗り場ドアの抵抗値を考慮し、ドアの最適な制御を行うために、上記の速度偏差の絶対値を求めて、あらかじめ格納されているゲインテーブルからこの絶対値に応じて特定した適当なゲインを用いて、ドアの開閉に最適な電流指令を求め、モータへ出力していた(例えば、特許文献3参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平2−310284号公報
【特許文献2】特開平11−029278号公報
【特許文献3】特開2005−255364号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来技術には、以下のような課題がある。
従来のエレベータドアの点検装置では、いずれの方法も、ドアに異常が発生していても、制御システムが点検用速度指令に合わせた速度で駆動モータを回転させるように、電流値などが調整される。このため、微小な異常では、駆動モータの速度がほとんど変化せず、点検用速度指令とモータ速度との速度偏差を基準値と比較する方法では、微小な異常を検出できず、戸開閉不良といった大きな異常が発生するまで検出できないという問題があった。
【0007】
また、戸開閉にかかる時間を基準値と比較する方法でも、同様の問題があった。このため、異常が発生しないように定期的に保守員によるドア溝等のゴミの清掃作業をしなければならず、手間がかかるという問題もあった。
【0008】
本発明は、前記のような課題を解決するためになされたものであり、エレベータドアの開閉時の異常を精度よく検出することのできるエレベータドアの点検装置およびエレベータドアの点検方法を得ることを目的とする。
【課題を解決するための手段】
【0009】
本発明に係るエレベータドアの点検装置は、エレベータドアの開閉異常を検出するためのエレベータドアの点検装置であって、一定速度の点検用速度により駆動モータを速度制御することで開閉異常点検時におけるドアの開閉動作を制御するドア制御部と、ドア制御部による開閉動作中における駆動モータの実速度を所定のサンプリング間隔で抽出し、抽出した実速度と点検用速度との偏差を求め、開閉動作中の所定の点検区間における偏差の絶対値を積算することで速度偏差積算値を算出し、速度偏差積算値が所定の基準値を超えた場合にエレベータドアの開閉異常が発生したと判断する点検部とを備えるものである。
【0010】
また、本発明に係るエレベータドアの点検方法は、一定速度の点検用速度により駆動モータを速度制御することで開閉異常点検時におけるエレベータドアの開閉動作を制御し、エレベータドアの開閉異常を検出するためのエレベータドアの点検方法であって、開閉異常点検時の開閉動作中における駆動モータの実速度を所定のサンプリング間隔で抽出するステップと、抽出した実速度と点検用速度との偏差を求め、開閉動作中の所定の点検区間における偏差の絶対値を積算することで速度偏差積算値を算出するステップと、速度偏差積算値が所定の基準値を超えた場合にエレベータドアの開閉異常が発生したと判断するステップとを備えるものである。
【発明の効果】
【0011】
本発明に係るエレベータドアの点検装置およびエレベータドアの点検方法によれば、点検開閉時における速度指令値として速度変動のない一定の値を用い、開閉動作時における速度偏差の絶対値の積算値が基準値を超えるか否かで開閉異常を検出することにより、エレベータドアの開閉時の異常を精度よく検出することのできるエレベータドアの点検装置およびエレベータドアの点検方法を得ることができる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施の形態1におけるエレベータドアの点検装置の正面図である。
【図2】本発明の実施の形態1におけるエレベータドアの点検装置の一例を示す全体構成図である。
【図3】本発明の実施の形態1に係るエレベータドアの点検装置において、点検開閉時の速度偏差に基づく正常/異常判定方法の説明図である。
【図4】本発明の実施の形態2に係るエレベータドアの点検装置において、戸開時と戸閉時の速度偏差の違いを示す説明図である。
【図5】本発明の実施の形態3におけるエレベータドアの点検装置の一例を示す全体構成図である。
【図6】本発明の実施の形態4におけるエレベータドアの点検装置の一例を示す全体構成図である。
【図7】本発明の実施の形態4に係るエレベータドアの点検装置において、電流制限をかけることによる効果を示す説明図である。
【図8】本発明の実施の形態5におけるエレベータドアの点検装置の一例を示す全体構成図である。
【発明を実施するための形態】
【0013】
以下、本発明のエレベータドアの点検装置およびエレベータドアの点検方法の好適な実施の形態につき図面を用いて説明する。
【0014】
実施の形態1.
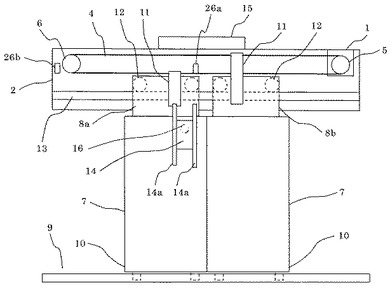
図1は、本発明の実施の形態1におけるエレベータドアの点検装置の正面図であり、具体的には、一般的な両開きドアの装置全体の正面図(乗場ドア側から見る状態)を示している。そこで、この図1に基づいて、本実施の形態1におけるエレベータドアの点検装置の構成について説明する。
【0015】
かごドア7は、ハンガープレート8(駆動側ハンガープレート8aおよび従動側ハンガープレート8b)に取付けられたハンガーローラ12により、ハンガーレール13に吊下されている。そして、ハンガーレール13上をハンガーローラ12が転動することで、かごドア7が開閉する。
【0016】
ドア装置2にある駆動プーリ5と、この駆動プーリ5と対称位置に設けられたアイドラプーリ6との間には、無端状に架設されたベルト4が巻掛けられる。また、駆動モータ1は、駆動プーリ5と連結されており、駆動モータ1の回転が、駆動プーリ5に伝達される。
【0017】
駆動側ハンガープレート8aには、ベルト4を把持する駆動側把持部材11aが取付けられており、ベルト4の下部を把持している。一方、従動側ハンガープレート8bには、ベルト4の上部を把持する従動側把持部材11bが取付けられている。また、かごドア7の下端部には、戸の脚10が取り付けられており、この戸の脚10は、かご敷居9の溝にはまり込んで、かごドア7が開閉するときの下端部分をガイドしている。
【0018】
また、かごドア7には、係合装置14が取り付けられており、乗場ドア(図示していない)にはドア開閉時に係合装置14により係合される駆動ローラ16がある。かごドア7の全閉時には、係合装置14の係合ベーン14aと駆動ローラ16は離れており、エレベータの上下移動時に衝突しないようになっている。
【0019】
一方、ドア装置2の駆動モータ1により戸開動作がされると、駆動モータ1の動作により、駆動プーリ5およびアイドラプーリ6に巻掛けられたベルト4が左右方向に動き、把持部材11を介してかごドア7を戸開方向に動作させる。これにより、かごドア7は、全閉から開きはじめる。
【0020】
次に、かごドア7が係合ベーン14aと駆動ローラ16の隙間分だけ動くと、係合装置14の係合ベーン14aが乗場ドアにある駆動ローラ16と係合する。この結果、戸開動力が乗場ドアに伝達され、かごドア7と乗場ドアとが一緒に戸開動作を行う。なお、ドアが全開位置まで動いたことは、ドア全開検知スイッチ26bで検知される。
【0021】
また、戸閉時は、この動きと逆となり、かごドア7と乗り場ドアは、係合装置14と駆動ローラ16で係合した状態で一緒に閉じてくる。かごドア7の全閉手前で、乗り場ドアがかごドア7よりも係合ベーン14aと駆動ローラ16の隙間分だけ早く全閉して係合が解除され、その後、かごドア7のみが全閉まで駆動される。なお、ドアが全閉位置まで動いたことは、ドア全閉検知スイッチ26aで検知される。
【0022】
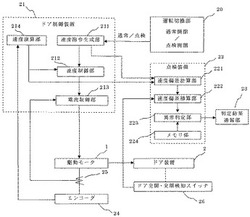
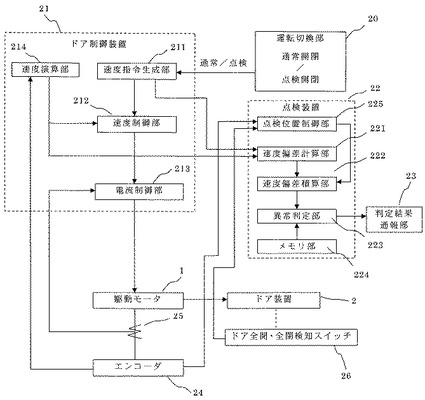
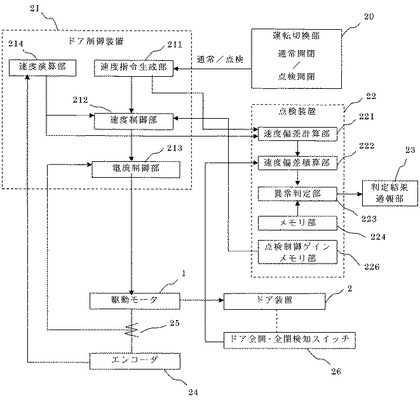
図2は、本発明の実施の形態1におけるエレベータドアの点検装置の一例を示す全体構成図である。本実施の形態1におけるエレベータドアの点検装置は、駆動モータ1、ドア装置2、運転切換部20、ドア制御装置21、点検装置22、判定結果通報部23、エンコーダ24、電流検出器25、およびドア全開・全閉検知スイッチ26を備えている。ここで、ドア全開・全閉検知スイッチ26は、先の図1で説明したドア全開検知スイッチ26bおよびドア全閉検知スイッチ26aの総称である。
【0023】
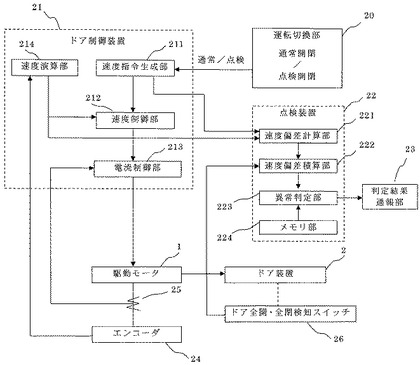
また、ドア制御装置21は、速度指令生成部211、速度制御部212、電流制御部213、および速度演算部214を備えて構成されている。また、点検装置22は、速度偏差計算部221、速度偏差積算部222、異常判定部223、およびメモリ部224を備えて構成されている。
【0024】
次に、このような図2の構成を備えたエレベータドアの点検装置による各構成要素の機能について、具体的に説明する。ドアを開閉する駆動モータ1は、先の図1を用いて説明したように、ドア装置2に取り付けられ、駆動プーリ5を介してドア装置2のかごドア7を動作させている。
【0025】
駆動モータ1には、その回転数に応じてパルスを発生するエンコーダ24が直結されている。そして、エンコーダ24からのパルスは、ドア制御装置21内の速度演算部214に送られ、速度演算部214において駆動モータ1の実速度が演算される。
【0026】
運転切換部20は、ドアの開閉制御を行うドア制御装置21に対して、通常運転、点検運転の切換指令を出すものである。一方、ドア制御装置21は、運転切換部20からの切換指令に基づいて、通常運転または点検運転のドア制御を行う。
【0027】
具体的には、ドア制御装置21内の速度指令生成部211は、通常の戸開閉速度指令データ、および点検用速度指令データなどを格納しており、運転切換部20からの切換指令に基づいて、通常・点検の運転に合わせた速度指令を生成する。
【0028】
速度制御部212は、速度指令生成部211で生成された速度指令と、速度演算部214で演算された駆動モータ1の実速度とを取り込み、速度指令値に合わせて駆動モータ1が動作するように、速度制御指令を出力することで、速度制御を行う。
【0029】
電流制御部213は、速度制御部212から出力された速度制御指令、および電流検出器25により計測された駆動モータ1に実際に供給された電流値に基づいて、駆動モータ1に供給する電流値を制御する。
【0030】
次に、点検装置22の機能について説明する。点検装置22内の速度偏差計算部221は、ドアが点検運転を行うとき、速度指令生成部211からの速度指令値と、速度演算部214で演算した駆動モータ1の実速度とに基づいて、速度偏差を計算する。
【0031】
速度偏差積算部222は、速度偏差計算部221で計算された速度偏差の絶対値を順次積算し、記録する。一方、メモリ部224には、ドアに異常がない時に点検運転した場合の速度偏差の絶対値の積算結果が記憶されている。そして、異常判定部223は、速度偏差積算部222で得られた値(実測値)と、メモリ部224に記憶されている異常がない時の積算結果の値(正常値)とを比較し、大小関係に応じて正常・異常の判定を行う。
【0032】
さらに、異常判定部223は、正常・異常の判定結果を、判定結果通報部23を介して保守センターなどに知らせる。
【0033】
次に、エレベータドアの通常開閉及び点検開閉を行う際の一連動作について説明する。まず始めに、通常開閉時の一連動作について説明する。
運転切換部20で通常開閉が選択されると、その指令は、ドア制御装置21内の速度指令生成部211に送られる。
【0034】
通常開閉の指令に応じて、速度指令生成部211は、通常戸開閉用の速度指令を読み出し、速度制御部212に送る。速度制御部212は、速度指令生成部211からの速度指令を速度基準値とし、速度演算部214で演算された駆動モータ1の実速度を速度フィードバック値として速度制御を行って制御量を求め、電流基準値として出力する。
【0035】
これに対して、電流制御部213は、速度制御部212からの制御量を電流基準値とし、電流検出器25により計測された、駆動モータ1に実際に供給された電流値を電流フィードバック値として電流制御を行い、駆動モータ1に供給する電流を制御する。この結果、ドア制御装置21は、駆動モータ1を速度指令に応じて回転させることで、ドアを開または閉動作させる。
【0036】
次に、点検運転時の一連動作について説明する。
保守センターからの点検指令(図示しない)に基づいて、運転切換部20で点検運転に切換設定された場合には、上述した通常開閉時と同様の、ドア制御装置21による処理に加え、点検装置22も、ドア点検用の処理を実施する。すなわち、運転切換部20で点検開閉が選択されると、その指令は、ドア制御装置21内の速度指令生成部211に送られる。
【0037】
点検開閉の指令に応じて、速度指令生成部211は、速度変動のない一定速度の点検開閉用速度指令を読み出す。ドア制御装置21によるそれ以降の制御は、上述した通常開閉の場合と同様の流れで行われる。それとともに、ドア制御装置21は、速度指令生成部211で生成した点検開閉用速度指令と、速度演算部214で演算した駆動モータ1の実速度とを、点検装置22内の速度偏差計算部221に対して出力する。
【0038】
一方、点検装置22内の速度偏差計算部221は、ドア制御装置21側から取得した点検開閉用速度指令値と実速度との偏差を算出する。
【0039】
次に、速度偏差積算部222は、ドア全開・全閉検知スイッチ26で検知される戸開開始から戸閉完了までの間において、速度偏差計算部221で算出される速度偏差を、あらかじめ定められた間隔でサンプリングし、サンプリングした速度偏差の絶対値を順次積算する処理を行い、速度偏差積算値εを算出する。
【0040】
次に、異常判定部223は、速度偏差積算部222で算出された速度偏差積算値εと、メモリ部224にあらかじめ格納された基準値ε0との比較を行い、ε≦ε0の場合には正常、ε>ε0の場合には異常と判定する。そして、異常判定部223は、判定結果を判定結果通報部23を介して保守センターに知らせる。
【0041】
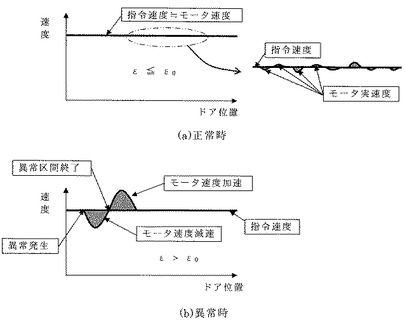
次に、速度偏差積算値εに基づく正常/異常判定方法について、図3を用いて詳細に説明する。図3は、本発明の実施の形態1に係るエレベータドアの点検装置において、点検開閉時の速度偏差に基づく正常/異常判定方法の説明図である。図3(a)は正常判定となる場合、図3(b)は異常判定になる場合を例示している。
【0042】
点検開閉時においても、ドア制御装置21は、通常開閉時と同様に、速度指令値に追従するように速度制御を実施している。そこで、本実施の形態1では、点検開閉時における速度指令値を、図3(a)に示したように、速度変動のない一定の値としている。
【0043】
このような速度指令値を用いた際に、ドアが正常な場合には、図3(a)の左側に示すように、速度指令値とモータ実速度との差がほとんど生じない結果となる。細かく見ると、図3(a)の右側に示すように、速度指令値とモータ実速度とで差が生じた状態となっているが、速度偏差の絶対値の積算値も0に近い小さな値となる。
【0044】
これに対して、ドアに異常がある場合には、図3(b)に示すように、異常発生した箇所で想定外の負荷が発生したことにより、速度指令値からの速度の減速が生じ、異常発生区間が終わると、異常区間で減速した速度を指令値に戻そうとする補正の働きが過大となり、速度指令値からの加速が生じる。このため、速度偏差の絶対値の積算値は、先の図3(a)の正常時における積算値と比較して、より大きな値となる。
【0045】
従って、正常時の基準値ε0と、点検時の実測の積算値として得られたεとの大小関係を比較することにより、容易にドアの異常を見つけることができる。
【0046】
以上のように、実施の形態1によれば、点検開閉時における速度指令値として速度変動のない一定の値を用い、開閉動作時における速度偏差の絶対値の積算値が基準値を超えるか否かを判定することで、従来の点検方法では見つけることが難しかった微小なドアの異常も、容易に、かつ高精度に検知することができる。
【0047】
なお、本実施の形態1では、保守センターからの指令に基づいて通常運転と点検運転の切替を行う例を説明したが、保守員が現地で切換を行ってもよい。
【0048】
また、基準値の決定方法については、特に記載していないが、正常時の速度偏差積算値を定期的に学習させ、メモリ部224に記憶させてもよいし、事前に決められた値を用いてこれをメモリ部224に記憶させてもよい。また、誤検知を防止するために、正常時の値を係数倍した値を基準値として検出感度を調整できるようにしてもよい。
【0049】
また、本実施の形態1では、通常、戸開閉よりも低い一定速度指令値を用いて点検開閉を行う例を説明した。しかしながら、速度変動により基準値の値が大きくなり検知精度が落ちるという影響はあるものの、通常戸開閉速度指令を用いてもよい。
【0050】
また、積算値を算出する点検区間は、必ずしも戸開閉区間全体とする必要はなく、戸開閉区間のうちの所定の区間だけを点検区間として設定することも可能である。
【0051】
実施の形態2.
先の実施の形態1では、ドアの点検にあたって、戸開閉区間全体の速度偏差の積算値εを用いて、ドアの異常の有無を判定する場合について説明した。これに対して、本実施の形態2では、点検精度を高めるために、戸開時、戸閉時に分割して点検し、ドアの異常の有無を判定する場合について説明する。
【0052】
例えば、戸開時の速度偏差積算値εopと、戸閉時の速度偏差積算値εclを求め、それぞれの場合について、メモリ部224に保存されている基準値ε0’、ε0’’と比較することで、ドアの異常の有無を判定することができる。
【0053】
このように、戸開時、戸閉時を分割して速度偏差積算値を計算し、それぞれの基準値と比較することにより、例えば、ゴミづまりが戸閉時のみに顕著に発生するような異常の場合には、戸開閉区間全体の速度偏差積算値を求めて基準値と比較する場合に比べて、検出精度を向上させることができる。
【0054】
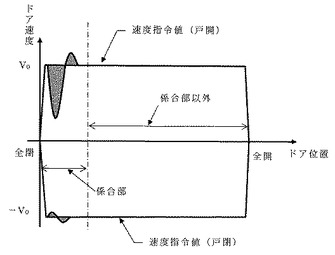
図4は、本発明の実施の形態2に係るエレベータドアの点検装置において、戸開時と戸閉時の速度偏差の違いを示す説明図である。図4に示すように、エレベータドアを点検開閉するとき、戸開側では、かごドアが戸開開始から一定速V0まで加速し、その後、一定速V0で全開位置まで動かす速度指令となる。一方、戸閉側では、戸閉開始から一定速−V0まで加速し、その後、全閉位置まで一定速−V0で動かすような速度指令となる。
【0055】
かごドアは、戸開側では、V0への加速途中、または、一定速V0なった後、乗り場ドアと係合する。一般に、乗り場ドアには、戸閉方向に錘などによるクローザ力が働いているため、駆動モータ1の実速度は大きく減速する。その後、駆動モータ1に流す電流値を補正して、実速度が一定速V0になるよう調整することとなる。このような動きをするため、戸開側の速度指令と駆動モータ1の実速度との速度偏差積算値の基準値ε0’は、大きくなる傾向がある。
【0056】
一方、戸閉側では、かごドアと乗り場ドアが係合した状態から動き始め、乗り場ドアのクローザ力が作用するため、駆動モータ1は、小さな力でドアを駆動できる。その後、戸開時に係合した位置で係合が外れ、乗り場ドアのクローザ力はなくなる。しかしながら、駆動モータ1は、かごドアのみを動かせばいいので、小さな力でドアを駆動できる。このように、戸閉時には、戸開時のような係合前後の大きな負荷変動は発生しないため、戸閉側での速度指令と実速度の速度偏差積算値の基準値ε0’’は、小さくなる傾向がある。
【0057】
ドア開閉時のこのような動きの違いを利用して、検知精度を高めるとともに点検速度を短縮する方法として、点検を戸閉のみで実施することもできる。すなわち、点検実施する戸閉時のみ、先の実施の形態1で説明した点検開閉の速度指令でドアを動かし、点検を実施しない戸開時には、通常の速度で戸開を行うことができる。
【0058】
以上のように、実施の形態2によれば、戸開時と戸閉時のドアの挙動の違いに着目し、戸開時と戸閉時に分割して点検を行う、あるいは戸閉時のみ点検を行うことができる。これにより、検知精度を高めるとともに点検時間を短縮することができる。
【0059】
なお、積算値を算出する点検区間は、必ずしも戸開時の全域、あるいは戸閉時の全域とする必要はなく、戸開時の所定の点検区間と、戸閉時の所定の点検区間とを個別に設定することも可能であり、開動作と閉動作で個別の判断指標による適切な点検を実施することができる。
【0060】
実施の形態3.
本実施の形態3では、戸開または戸閉の全区間一括ではなく、特定の区間ごとに分割してドアの異常を判定する場合について説明する。
ドアの点検にあたっては、乗り場ドアの係合のような事象で、先の図4のように局所的に速度偏差が大きくなる区間が発生することがわかっている場合がある。そこで、本実施の形態3では、戸開または戸閉の全区間で計算した速度偏差積算値εを用いてドアの異常を判定するのではなく、ドアの位置に応じていくつかの区間に区切り、それぞれの区間で求めた速度偏差積算値とそれぞれの区間で定められた基準値から、ドアの異常を判定する。
【0061】
すなわち、区間をN分割し(Nは2以上の整数)それぞれの区間でドアが正常に動いたときの速度偏差積算値ε0nを判定基準として決め、点検開閉時に計算したそれぞれの区間の速度偏差積算値εnを、基準とするε0nと比較することで点検結果を判定する(ここで、nは1〜Nの整数である)。
【0062】
図5は、本発明の実施の形態3におけるエレベータドアの点検装置の一例を示す全体構成図である。先の実施の形態1における図2の構成と比較すると、本実施の形態3における図5は、点検装置22内に点検位置制御部225をさらに備えている点が異なっている。そこで、この相違点を中心に、以下に説明する。
【0063】
点検位置制御部225は、ドア全開・全閉検知スイッチ26からドアの全開、全閉を監視し、エンコーダ24からのパルスからドアの位置を把握する。そして、点検位置制御部225は、ドアの開閉する間にあらかじめ決められている点検区間を識別し、速度偏差積算部に対して点検区間情報を出力する。
【0064】
運転切換部20で点検開閉が選択されると、ドア制御装置21では、先の実施の形態1と同様の手順で、駆動モータ1により、ドアを一定速で開閉する。一方、点検装置22では、速度偏差計算部221が、速度指令生成部211により生成された点検開閉用速度指令値と、速度演算部214によりエンコーダ24のパルスから計算された駆動モータ1の実速度との偏差を算出する。
【0065】
速度偏差積算部222では、点検位置制御部225からの点検区間情報に基づいて、速度偏差計算部221で求めた速度偏差の絶対値を順次積算する処理を行い、点検区間の速度偏差積算値εnを算出する。
【0066】
次に、異常判定部223は、点検区間ごとに算出された速度偏差積算値εnと、メモリ部224にあらかじめ記憶された点検区間ごとの基準値ε0nとの比較を行い、判定結果を判定結果通報部23を介して保守センターに知らせる。
【0067】
なお、ドア全開・全閉検知スイッチ26からの情報は、計算の開始、終了の情報として、速度偏差積算部222で処理してもよい。
【0068】
次に、先の図4を用いて、点検区間を係合区間と係合区間以外の区間とに分ける例を説明する。このように点検区間を設定すると、係合区間、係合区間以外の区間で、戸開時と戸閉時で異常の有無を点検することができる。この結果、戸開時または戸閉時のみ顕著に現れる異常に対して、より精度よく異常を検出することができる。
【0069】
また、基準となる速度偏差積算値が小さくなるように、区間を短くして点検しているため、異常により速度偏差積算値εnが変化したとき、基準値であるε0nとεnとの差が大きくなりやすい。このため、先の実施の形態2のように、戸開閉区間全体で判定するよりも、精度よく検出することができる。さらに、係合区間と係合区間以外で区間を区切って判定しているため、どの区間に異常が発生しているかも検知できる。
【0070】
なお、図4における判定区間については、係合部分とそれ以外の2つに区分する場合には限定されず、さらに細かい区間に分けてそれぞれに個別の基準値を設定し、判定してもよい。
【0071】
また、判定精度の向上の目的で、基準とする正常時の速度偏差積算値を小さくできるように、それぞれの区間について、戸開時または戸閉時のいずれか一方を選び、これらの区間をつなぎ合わせることで、全区間に関するドア開閉の異常検知を行うこともできる。
【0072】
以上のように、実施の形態3によれば、戸開または戸閉の区間を複数に分割してドアの異常を判定することで、異常検出精度の向上を図ることができる。さらに、どの区間で異常が発生したかを特定することもできる。
【0073】
実施の形態4.
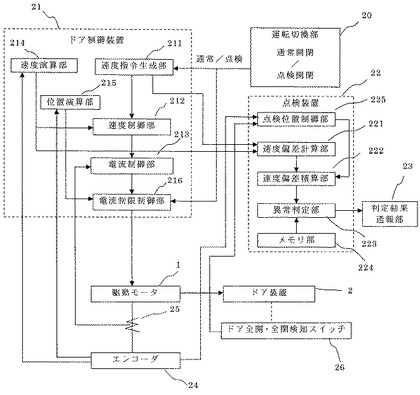
本実施の形態4では、ドア制御装置による開閉制御に電流制限をかけ、ドアの異常を検知する精度を向上させる方法について説明する。図6は、本発明の実施の形態4におけるエレベータドアの点検装置の一例を示す全体構成図である。先の実施の形態3における図5の構成と比較すると、本実施の形態4における図6は、ドア制御装置21内に位置演算部215および電流制限制御部216をさらに備えている点が異なっている。そこで、これらの相違点を中心に、以下に説明する。
【0074】
位置演算部215は、エンコーダ24からのパルスに基づいてドア位置を計算し、ドア位置情報を生成する。また、電流制限制御部216は、電流制御部213の後段に設けられており、電流制御部213からの電流指令に対して、駆動モータ1に供給する電流値の制限を行っている。
【0075】
運転切換部20は、点検開閉を選択したときに、速度指令生成部211に対して点検開閉の速度指令を発生させる入力を与えると同時に、電流制限制御部216に対して駆動モータ1に供給する電流にドアの位置によって制限がかかるよう、ドア位置による電流制限値Imnを読み込ませる。
【0076】
また、電流制限制御部216は、位置演算部215からドア位置情報も入力する。そして、電流制限制御部216は、電流制御部213で演算された電流指令値と、位置演算部215で得られドア位置情報、および、ドア位置に対応する電流制限値Imnの情報を基に補正計算を行い、補正された電流指令補正値を駆動モータ1に送る。
【0077】
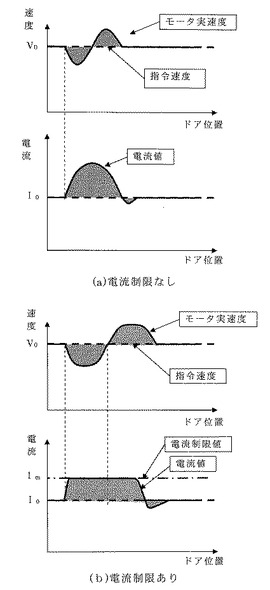
図7は、本発明の実施の形態4に係るエレベータドアの点検装置において、電流制限をかけることによる効果を示す説明図である。先の実施の形態1から3のエレベータのドア点検装置であれば、図7(a)に示すように、ドアに異常があり、駆動モータ1の実速度が減速すると、電流制御部213から駆動モータ1に供給する電流をI0から増やす指令が出され、駆動モータ1の実速度が速度指令値V0に合うように制御される。
【0078】
一方、本実施の形態4のように、電流制限をかける構成を備えることで、ドアに異常がないときは通常の点検開閉と変わらないが、ドアの異常によって負荷が設定トルク以上となると、図7(b)のように挙動することとなる。すなわち、駆動モータ1には電流制限値Im以上の電流が供給されないため、速度が遅くなったまま回復しない。そして、異常区間を抜けても、しばらくは速度指令値V0より実速度が遅い状態が続いた後、オーバーシュートにより速度指令値V0よりもモータ実速度が早い状態となる。
【0079】
また、ドアの異常による負荷がさらに大きい場合には、電流制限値Imnでは電流が不足し、ドアの動きが止まってしまう。その結果、速度偏差積算値εと基準値ε0の差が大きくなり、点検でドアの異常を検知する精度が向上する。
【0080】
なお、ドア位置によりあらかじめわかっている必要なトルクとは、ドアの加減速や、ドアクローザ、ドアを動かすために必要なトルクのことで、ドアの位置と動作方向で決まっており、計算や実測などでその大きさがわかっているもののことである。電流制限値Imnは、駆動モータ1の出力トルクがドア位置によって決まっている必要トルクに、適当な大きさの余裕を持たせた値、例えば、必要トルクの1.1倍や1.2倍等の係数を掛けた値を計算した電流値である。
【0081】
この駆動モータ1に供給する電流に制限値を設定する方法は、先の実施の形態1〜3と併用することで、点検での異常の検知精度を向上させることができる。
【0082】
以上のように、実施の形態4によれば、駆動モータを制御する際に電流制限をかける構成を備えることで、ドア点検用速度指令でドアを動かしたとき、設定トルク以上のトルクがかかるとドアの動きが止まったり、速度が遅くなったりする状態が顕著となる。この結果、モータ速度と点検用速度指令との差分の絶対値の和と基準値との比較において、異常が発生しているときの比較値の差が大きくなり、異常を見つけやすくすることができる。
【0083】
実施の形態5.
本実施の形態5では、点検時の制御ゲインを変更することで、ドアの異常を検知する精度を向上させる方法について説明する。図8は、本発明の実施の形態5におけるエレベータドアの点検装置の一例を示す全体構成図である。先の実施の形態1における図2の構成と比較すると、本実施の形態5における図8は、点検装置22内に点検制御ゲインメモリ部226をさらに備えている点が異なっている。そこで、この相違点を中心に、以下に説明する。
【0084】
点検制御ゲインメモリ部226には、点検開閉時に用いる制御ゲインが記憶されている。なお、点検装置22内のその他の構成による機能は、先の実施の形態1と同様であり、その詳細説明を省略する。
【0085】
本実施の形態5では、運転切換部20で通常開閉から点検開閉に切り換えられると、速度制御部212は、通常の戸開閉制御に用いていた制御ゲインから、点検制御ゲインメモリ部226から読み込んだ点検用の制御ゲインに変更する。
【0086】
一般に、通常の戸開閉に用いる制御ゲインは、戸開閉の速度指令への追従性と、ゴミづまり等の外乱による速度指令からの偏差を小さくすることを考慮して決められている。そのため、点検開閉時に通常の戸開閉に用いる制御ゲインを使うと、微小なゴミづまりなどの異常では速度偏差が小さくなることがある。
【0087】
そこで、本実施の形態5では、点検開閉に用いる制御ゲインを、通常の戸開閉に用いる制御ゲインとは異なる指標で設計し、点検制御ゲインメモリ部に記憶させておき、点検開閉時に用いている。
【0088】
具体的には、点検開閉に用いる制御ゲインとしては、点検用の戸開閉の速度指令への追従性は維持しつつ、ゴミづまり等の外乱が発生した場合に、速度指令からの偏差が大きくなる制御ゲインを用いる。
【0089】
以上のように、実施の形態5によれば、点検開閉時に通常の戸開閉時に用いる制御ゲインを点検用制御ゲインに換えて点検を行うことにより、点検開閉時にゴミづまり等の異常がある場合に、速度指令からの偏差が大きくなるとともに、異常を判定するための速度偏差積算値も大きくなり、微小な異常が見つけやすくなり、高精度な点検開閉を行うことができる。
【0090】
なお、上述した実施の形態5では、先の実施の形態1に対して制御ゲインの切換機能を追加する場合を説明したが、実施の形態2〜4に対して制御ゲインの切換機能を追加することも可能であり、同様の効果を得ることができる。
【0091】
また、図4に示したように、戸開閉時にかごドアと乗り場ドアが係合する位置では、速度指令との偏差が存在する。そのため、点検用制御ゲインに換えることで偏差が増大することが予想される。そこで、点検用制御ゲインを切り換える位置を戸開閉の全域ではなく、係合部以外に適用するように、区間を分け点検開閉を行ってもよい。
【符号の説明】
【0092】
1 駆動モータ、2 ドア装置、4 駆動ベルト、5 駆動プーリ、6 アイドラプーリ、7 かごドア、8 ハンガープレート、8a 駆動側ハンガープレート、8b 従動側ハンガープレート、9 かご敷居、10 戸の脚、11 把持部材、11a 駆動側把持部材、11b 従動側把持部材、12 ハンガーローラ、13 ハンガーレール、14 係合装置、14a 係合ベーン、16 駆動ローラ、20 運転切換部、21 ドア制御装置(ドア制御部)、211 速度指令生成部、212 速度制御部、213 電流制御部、214 速度演算部、215 位置演算部、216 電流制限制御部、22 点検装置(点検部)、221 速度偏差計算部、222 速度偏差積算部、223 異常判定部、224 メモリ部、225 点検位置制御部、226 点検制御ゲインメモリ部、23 判定結果通報部、24 エンコーダ、25 電流検出器、26 ドア全開・全閉検知スイッチ、26a ドア全閉検知スイッチ、26b ドア全開検知スイッチ。
【技術分野】
【0001】
本発明は、ゴミづまり等によるエレベータドアの開閉時の異常を、点検時における速度応答結果に基づいて精度よく検出するエレベータドアの点検装置およびエレベータドアの点検方法に関する。
【背景技術】
【0002】
ゴミづまり等による戸開閉不良を検出するための従来のエレベータドアの異常検出方法では、以下のような制御を行っている。まず始めに、低速度のドア点検用速度指令により制御されるモータで開閉動作を行い、このときのドア動作経過とともに変化するモータ速度とドア点検用速度指令との偏差を求める。そして、この速度偏差とあらかじめメモリに記憶しておいた基準偏差とを比較し、この比較結果の差が規定範囲内にないときには、ドアに異常があると判断していた(例えば、特許文献1参照)。
【0003】
また、従来のエレベータドアの別の異常検出方法では、ドアの開閉にかかる時間を計り、この開閉時間があらかじめ設定されていた基準時間内であるか否かで、ドアの異常の有無を判断していた(例えば、特許文献2参照)。
【0004】
また、従来のエレベータドアのさらに別の異常検出方法では、ドアの経年変化や各階床で異なる乗り場ドアの抵抗値を考慮し、ドアの最適な制御を行うために、上記の速度偏差の絶対値を求めて、あらかじめ格納されているゲインテーブルからこの絶対値に応じて特定した適当なゲインを用いて、ドアの開閉に最適な電流指令を求め、モータへ出力していた(例えば、特許文献3参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平2−310284号公報
【特許文献2】特開平11−029278号公報
【特許文献3】特開2005−255364号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来技術には、以下のような課題がある。
従来のエレベータドアの点検装置では、いずれの方法も、ドアに異常が発生していても、制御システムが点検用速度指令に合わせた速度で駆動モータを回転させるように、電流値などが調整される。このため、微小な異常では、駆動モータの速度がほとんど変化せず、点検用速度指令とモータ速度との速度偏差を基準値と比較する方法では、微小な異常を検出できず、戸開閉不良といった大きな異常が発生するまで検出できないという問題があった。
【0007】
また、戸開閉にかかる時間を基準値と比較する方法でも、同様の問題があった。このため、異常が発生しないように定期的に保守員によるドア溝等のゴミの清掃作業をしなければならず、手間がかかるという問題もあった。
【0008】
本発明は、前記のような課題を解決するためになされたものであり、エレベータドアの開閉時の異常を精度よく検出することのできるエレベータドアの点検装置およびエレベータドアの点検方法を得ることを目的とする。
【課題を解決するための手段】
【0009】
本発明に係るエレベータドアの点検装置は、エレベータドアの開閉異常を検出するためのエレベータドアの点検装置であって、一定速度の点検用速度により駆動モータを速度制御することで開閉異常点検時におけるドアの開閉動作を制御するドア制御部と、ドア制御部による開閉動作中における駆動モータの実速度を所定のサンプリング間隔で抽出し、抽出した実速度と点検用速度との偏差を求め、開閉動作中の所定の点検区間における偏差の絶対値を積算することで速度偏差積算値を算出し、速度偏差積算値が所定の基準値を超えた場合にエレベータドアの開閉異常が発生したと判断する点検部とを備えるものである。
【0010】
また、本発明に係るエレベータドアの点検方法は、一定速度の点検用速度により駆動モータを速度制御することで開閉異常点検時におけるエレベータドアの開閉動作を制御し、エレベータドアの開閉異常を検出するためのエレベータドアの点検方法であって、開閉異常点検時の開閉動作中における駆動モータの実速度を所定のサンプリング間隔で抽出するステップと、抽出した実速度と点検用速度との偏差を求め、開閉動作中の所定の点検区間における偏差の絶対値を積算することで速度偏差積算値を算出するステップと、速度偏差積算値が所定の基準値を超えた場合にエレベータドアの開閉異常が発生したと判断するステップとを備えるものである。
【発明の効果】
【0011】
本発明に係るエレベータドアの点検装置およびエレベータドアの点検方法によれば、点検開閉時における速度指令値として速度変動のない一定の値を用い、開閉動作時における速度偏差の絶対値の積算値が基準値を超えるか否かで開閉異常を検出することにより、エレベータドアの開閉時の異常を精度よく検出することのできるエレベータドアの点検装置およびエレベータドアの点検方法を得ることができる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施の形態1におけるエレベータドアの点検装置の正面図である。
【図2】本発明の実施の形態1におけるエレベータドアの点検装置の一例を示す全体構成図である。
【図3】本発明の実施の形態1に係るエレベータドアの点検装置において、点検開閉時の速度偏差に基づく正常/異常判定方法の説明図である。
【図4】本発明の実施の形態2に係るエレベータドアの点検装置において、戸開時と戸閉時の速度偏差の違いを示す説明図である。
【図5】本発明の実施の形態3におけるエレベータドアの点検装置の一例を示す全体構成図である。
【図6】本発明の実施の形態4におけるエレベータドアの点検装置の一例を示す全体構成図である。
【図7】本発明の実施の形態4に係るエレベータドアの点検装置において、電流制限をかけることによる効果を示す説明図である。
【図8】本発明の実施の形態5におけるエレベータドアの点検装置の一例を示す全体構成図である。
【発明を実施するための形態】
【0013】
以下、本発明のエレベータドアの点検装置およびエレベータドアの点検方法の好適な実施の形態につき図面を用いて説明する。
【0014】
実施の形態1.
図1は、本発明の実施の形態1におけるエレベータドアの点検装置の正面図であり、具体的には、一般的な両開きドアの装置全体の正面図(乗場ドア側から見る状態)を示している。そこで、この図1に基づいて、本実施の形態1におけるエレベータドアの点検装置の構成について説明する。
【0015】
かごドア7は、ハンガープレート8(駆動側ハンガープレート8aおよび従動側ハンガープレート8b)に取付けられたハンガーローラ12により、ハンガーレール13に吊下されている。そして、ハンガーレール13上をハンガーローラ12が転動することで、かごドア7が開閉する。
【0016】
ドア装置2にある駆動プーリ5と、この駆動プーリ5と対称位置に設けられたアイドラプーリ6との間には、無端状に架設されたベルト4が巻掛けられる。また、駆動モータ1は、駆動プーリ5と連結されており、駆動モータ1の回転が、駆動プーリ5に伝達される。
【0017】
駆動側ハンガープレート8aには、ベルト4を把持する駆動側把持部材11aが取付けられており、ベルト4の下部を把持している。一方、従動側ハンガープレート8bには、ベルト4の上部を把持する従動側把持部材11bが取付けられている。また、かごドア7の下端部には、戸の脚10が取り付けられており、この戸の脚10は、かご敷居9の溝にはまり込んで、かごドア7が開閉するときの下端部分をガイドしている。
【0018】
また、かごドア7には、係合装置14が取り付けられており、乗場ドア(図示していない)にはドア開閉時に係合装置14により係合される駆動ローラ16がある。かごドア7の全閉時には、係合装置14の係合ベーン14aと駆動ローラ16は離れており、エレベータの上下移動時に衝突しないようになっている。
【0019】
一方、ドア装置2の駆動モータ1により戸開動作がされると、駆動モータ1の動作により、駆動プーリ5およびアイドラプーリ6に巻掛けられたベルト4が左右方向に動き、把持部材11を介してかごドア7を戸開方向に動作させる。これにより、かごドア7は、全閉から開きはじめる。
【0020】
次に、かごドア7が係合ベーン14aと駆動ローラ16の隙間分だけ動くと、係合装置14の係合ベーン14aが乗場ドアにある駆動ローラ16と係合する。この結果、戸開動力が乗場ドアに伝達され、かごドア7と乗場ドアとが一緒に戸開動作を行う。なお、ドアが全開位置まで動いたことは、ドア全開検知スイッチ26bで検知される。
【0021】
また、戸閉時は、この動きと逆となり、かごドア7と乗り場ドアは、係合装置14と駆動ローラ16で係合した状態で一緒に閉じてくる。かごドア7の全閉手前で、乗り場ドアがかごドア7よりも係合ベーン14aと駆動ローラ16の隙間分だけ早く全閉して係合が解除され、その後、かごドア7のみが全閉まで駆動される。なお、ドアが全閉位置まで動いたことは、ドア全閉検知スイッチ26aで検知される。
【0022】
図2は、本発明の実施の形態1におけるエレベータドアの点検装置の一例を示す全体構成図である。本実施の形態1におけるエレベータドアの点検装置は、駆動モータ1、ドア装置2、運転切換部20、ドア制御装置21、点検装置22、判定結果通報部23、エンコーダ24、電流検出器25、およびドア全開・全閉検知スイッチ26を備えている。ここで、ドア全開・全閉検知スイッチ26は、先の図1で説明したドア全開検知スイッチ26bおよびドア全閉検知スイッチ26aの総称である。
【0023】
また、ドア制御装置21は、速度指令生成部211、速度制御部212、電流制御部213、および速度演算部214を備えて構成されている。また、点検装置22は、速度偏差計算部221、速度偏差積算部222、異常判定部223、およびメモリ部224を備えて構成されている。
【0024】
次に、このような図2の構成を備えたエレベータドアの点検装置による各構成要素の機能について、具体的に説明する。ドアを開閉する駆動モータ1は、先の図1を用いて説明したように、ドア装置2に取り付けられ、駆動プーリ5を介してドア装置2のかごドア7を動作させている。
【0025】
駆動モータ1には、その回転数に応じてパルスを発生するエンコーダ24が直結されている。そして、エンコーダ24からのパルスは、ドア制御装置21内の速度演算部214に送られ、速度演算部214において駆動モータ1の実速度が演算される。
【0026】
運転切換部20は、ドアの開閉制御を行うドア制御装置21に対して、通常運転、点検運転の切換指令を出すものである。一方、ドア制御装置21は、運転切換部20からの切換指令に基づいて、通常運転または点検運転のドア制御を行う。
【0027】
具体的には、ドア制御装置21内の速度指令生成部211は、通常の戸開閉速度指令データ、および点検用速度指令データなどを格納しており、運転切換部20からの切換指令に基づいて、通常・点検の運転に合わせた速度指令を生成する。
【0028】
速度制御部212は、速度指令生成部211で生成された速度指令と、速度演算部214で演算された駆動モータ1の実速度とを取り込み、速度指令値に合わせて駆動モータ1が動作するように、速度制御指令を出力することで、速度制御を行う。
【0029】
電流制御部213は、速度制御部212から出力された速度制御指令、および電流検出器25により計測された駆動モータ1に実際に供給された電流値に基づいて、駆動モータ1に供給する電流値を制御する。
【0030】
次に、点検装置22の機能について説明する。点検装置22内の速度偏差計算部221は、ドアが点検運転を行うとき、速度指令生成部211からの速度指令値と、速度演算部214で演算した駆動モータ1の実速度とに基づいて、速度偏差を計算する。
【0031】
速度偏差積算部222は、速度偏差計算部221で計算された速度偏差の絶対値を順次積算し、記録する。一方、メモリ部224には、ドアに異常がない時に点検運転した場合の速度偏差の絶対値の積算結果が記憶されている。そして、異常判定部223は、速度偏差積算部222で得られた値(実測値)と、メモリ部224に記憶されている異常がない時の積算結果の値(正常値)とを比較し、大小関係に応じて正常・異常の判定を行う。
【0032】
さらに、異常判定部223は、正常・異常の判定結果を、判定結果通報部23を介して保守センターなどに知らせる。
【0033】
次に、エレベータドアの通常開閉及び点検開閉を行う際の一連動作について説明する。まず始めに、通常開閉時の一連動作について説明する。
運転切換部20で通常開閉が選択されると、その指令は、ドア制御装置21内の速度指令生成部211に送られる。
【0034】
通常開閉の指令に応じて、速度指令生成部211は、通常戸開閉用の速度指令を読み出し、速度制御部212に送る。速度制御部212は、速度指令生成部211からの速度指令を速度基準値とし、速度演算部214で演算された駆動モータ1の実速度を速度フィードバック値として速度制御を行って制御量を求め、電流基準値として出力する。
【0035】
これに対して、電流制御部213は、速度制御部212からの制御量を電流基準値とし、電流検出器25により計測された、駆動モータ1に実際に供給された電流値を電流フィードバック値として電流制御を行い、駆動モータ1に供給する電流を制御する。この結果、ドア制御装置21は、駆動モータ1を速度指令に応じて回転させることで、ドアを開または閉動作させる。
【0036】
次に、点検運転時の一連動作について説明する。
保守センターからの点検指令(図示しない)に基づいて、運転切換部20で点検運転に切換設定された場合には、上述した通常開閉時と同様の、ドア制御装置21による処理に加え、点検装置22も、ドア点検用の処理を実施する。すなわち、運転切換部20で点検開閉が選択されると、その指令は、ドア制御装置21内の速度指令生成部211に送られる。
【0037】
点検開閉の指令に応じて、速度指令生成部211は、速度変動のない一定速度の点検開閉用速度指令を読み出す。ドア制御装置21によるそれ以降の制御は、上述した通常開閉の場合と同様の流れで行われる。それとともに、ドア制御装置21は、速度指令生成部211で生成した点検開閉用速度指令と、速度演算部214で演算した駆動モータ1の実速度とを、点検装置22内の速度偏差計算部221に対して出力する。
【0038】
一方、点検装置22内の速度偏差計算部221は、ドア制御装置21側から取得した点検開閉用速度指令値と実速度との偏差を算出する。
【0039】
次に、速度偏差積算部222は、ドア全開・全閉検知スイッチ26で検知される戸開開始から戸閉完了までの間において、速度偏差計算部221で算出される速度偏差を、あらかじめ定められた間隔でサンプリングし、サンプリングした速度偏差の絶対値を順次積算する処理を行い、速度偏差積算値εを算出する。
【0040】
次に、異常判定部223は、速度偏差積算部222で算出された速度偏差積算値εと、メモリ部224にあらかじめ格納された基準値ε0との比較を行い、ε≦ε0の場合には正常、ε>ε0の場合には異常と判定する。そして、異常判定部223は、判定結果を判定結果通報部23を介して保守センターに知らせる。
【0041】
次に、速度偏差積算値εに基づく正常/異常判定方法について、図3を用いて詳細に説明する。図3は、本発明の実施の形態1に係るエレベータドアの点検装置において、点検開閉時の速度偏差に基づく正常/異常判定方法の説明図である。図3(a)は正常判定となる場合、図3(b)は異常判定になる場合を例示している。
【0042】
点検開閉時においても、ドア制御装置21は、通常開閉時と同様に、速度指令値に追従するように速度制御を実施している。そこで、本実施の形態1では、点検開閉時における速度指令値を、図3(a)に示したように、速度変動のない一定の値としている。
【0043】
このような速度指令値を用いた際に、ドアが正常な場合には、図3(a)の左側に示すように、速度指令値とモータ実速度との差がほとんど生じない結果となる。細かく見ると、図3(a)の右側に示すように、速度指令値とモータ実速度とで差が生じた状態となっているが、速度偏差の絶対値の積算値も0に近い小さな値となる。
【0044】
これに対して、ドアに異常がある場合には、図3(b)に示すように、異常発生した箇所で想定外の負荷が発生したことにより、速度指令値からの速度の減速が生じ、異常発生区間が終わると、異常区間で減速した速度を指令値に戻そうとする補正の働きが過大となり、速度指令値からの加速が生じる。このため、速度偏差の絶対値の積算値は、先の図3(a)の正常時における積算値と比較して、より大きな値となる。
【0045】
従って、正常時の基準値ε0と、点検時の実測の積算値として得られたεとの大小関係を比較することにより、容易にドアの異常を見つけることができる。
【0046】
以上のように、実施の形態1によれば、点検開閉時における速度指令値として速度変動のない一定の値を用い、開閉動作時における速度偏差の絶対値の積算値が基準値を超えるか否かを判定することで、従来の点検方法では見つけることが難しかった微小なドアの異常も、容易に、かつ高精度に検知することができる。
【0047】
なお、本実施の形態1では、保守センターからの指令に基づいて通常運転と点検運転の切替を行う例を説明したが、保守員が現地で切換を行ってもよい。
【0048】
また、基準値の決定方法については、特に記載していないが、正常時の速度偏差積算値を定期的に学習させ、メモリ部224に記憶させてもよいし、事前に決められた値を用いてこれをメモリ部224に記憶させてもよい。また、誤検知を防止するために、正常時の値を係数倍した値を基準値として検出感度を調整できるようにしてもよい。
【0049】
また、本実施の形態1では、通常、戸開閉よりも低い一定速度指令値を用いて点検開閉を行う例を説明した。しかしながら、速度変動により基準値の値が大きくなり検知精度が落ちるという影響はあるものの、通常戸開閉速度指令を用いてもよい。
【0050】
また、積算値を算出する点検区間は、必ずしも戸開閉区間全体とする必要はなく、戸開閉区間のうちの所定の区間だけを点検区間として設定することも可能である。
【0051】
実施の形態2.
先の実施の形態1では、ドアの点検にあたって、戸開閉区間全体の速度偏差の積算値εを用いて、ドアの異常の有無を判定する場合について説明した。これに対して、本実施の形態2では、点検精度を高めるために、戸開時、戸閉時に分割して点検し、ドアの異常の有無を判定する場合について説明する。
【0052】
例えば、戸開時の速度偏差積算値εopと、戸閉時の速度偏差積算値εclを求め、それぞれの場合について、メモリ部224に保存されている基準値ε0’、ε0’’と比較することで、ドアの異常の有無を判定することができる。
【0053】
このように、戸開時、戸閉時を分割して速度偏差積算値を計算し、それぞれの基準値と比較することにより、例えば、ゴミづまりが戸閉時のみに顕著に発生するような異常の場合には、戸開閉区間全体の速度偏差積算値を求めて基準値と比較する場合に比べて、検出精度を向上させることができる。
【0054】
図4は、本発明の実施の形態2に係るエレベータドアの点検装置において、戸開時と戸閉時の速度偏差の違いを示す説明図である。図4に示すように、エレベータドアを点検開閉するとき、戸開側では、かごドアが戸開開始から一定速V0まで加速し、その後、一定速V0で全開位置まで動かす速度指令となる。一方、戸閉側では、戸閉開始から一定速−V0まで加速し、その後、全閉位置まで一定速−V0で動かすような速度指令となる。
【0055】
かごドアは、戸開側では、V0への加速途中、または、一定速V0なった後、乗り場ドアと係合する。一般に、乗り場ドアには、戸閉方向に錘などによるクローザ力が働いているため、駆動モータ1の実速度は大きく減速する。その後、駆動モータ1に流す電流値を補正して、実速度が一定速V0になるよう調整することとなる。このような動きをするため、戸開側の速度指令と駆動モータ1の実速度との速度偏差積算値の基準値ε0’は、大きくなる傾向がある。
【0056】
一方、戸閉側では、かごドアと乗り場ドアが係合した状態から動き始め、乗り場ドアのクローザ力が作用するため、駆動モータ1は、小さな力でドアを駆動できる。その後、戸開時に係合した位置で係合が外れ、乗り場ドアのクローザ力はなくなる。しかしながら、駆動モータ1は、かごドアのみを動かせばいいので、小さな力でドアを駆動できる。このように、戸閉時には、戸開時のような係合前後の大きな負荷変動は発生しないため、戸閉側での速度指令と実速度の速度偏差積算値の基準値ε0’’は、小さくなる傾向がある。
【0057】
ドア開閉時のこのような動きの違いを利用して、検知精度を高めるとともに点検速度を短縮する方法として、点検を戸閉のみで実施することもできる。すなわち、点検実施する戸閉時のみ、先の実施の形態1で説明した点検開閉の速度指令でドアを動かし、点検を実施しない戸開時には、通常の速度で戸開を行うことができる。
【0058】
以上のように、実施の形態2によれば、戸開時と戸閉時のドアの挙動の違いに着目し、戸開時と戸閉時に分割して点検を行う、あるいは戸閉時のみ点検を行うことができる。これにより、検知精度を高めるとともに点検時間を短縮することができる。
【0059】
なお、積算値を算出する点検区間は、必ずしも戸開時の全域、あるいは戸閉時の全域とする必要はなく、戸開時の所定の点検区間と、戸閉時の所定の点検区間とを個別に設定することも可能であり、開動作と閉動作で個別の判断指標による適切な点検を実施することができる。
【0060】
実施の形態3.
本実施の形態3では、戸開または戸閉の全区間一括ではなく、特定の区間ごとに分割してドアの異常を判定する場合について説明する。
ドアの点検にあたっては、乗り場ドアの係合のような事象で、先の図4のように局所的に速度偏差が大きくなる区間が発生することがわかっている場合がある。そこで、本実施の形態3では、戸開または戸閉の全区間で計算した速度偏差積算値εを用いてドアの異常を判定するのではなく、ドアの位置に応じていくつかの区間に区切り、それぞれの区間で求めた速度偏差積算値とそれぞれの区間で定められた基準値から、ドアの異常を判定する。
【0061】
すなわち、区間をN分割し(Nは2以上の整数)それぞれの区間でドアが正常に動いたときの速度偏差積算値ε0nを判定基準として決め、点検開閉時に計算したそれぞれの区間の速度偏差積算値εnを、基準とするε0nと比較することで点検結果を判定する(ここで、nは1〜Nの整数である)。
【0062】
図5は、本発明の実施の形態3におけるエレベータドアの点検装置の一例を示す全体構成図である。先の実施の形態1における図2の構成と比較すると、本実施の形態3における図5は、点検装置22内に点検位置制御部225をさらに備えている点が異なっている。そこで、この相違点を中心に、以下に説明する。
【0063】
点検位置制御部225は、ドア全開・全閉検知スイッチ26からドアの全開、全閉を監視し、エンコーダ24からのパルスからドアの位置を把握する。そして、点検位置制御部225は、ドアの開閉する間にあらかじめ決められている点検区間を識別し、速度偏差積算部に対して点検区間情報を出力する。
【0064】
運転切換部20で点検開閉が選択されると、ドア制御装置21では、先の実施の形態1と同様の手順で、駆動モータ1により、ドアを一定速で開閉する。一方、点検装置22では、速度偏差計算部221が、速度指令生成部211により生成された点検開閉用速度指令値と、速度演算部214によりエンコーダ24のパルスから計算された駆動モータ1の実速度との偏差を算出する。
【0065】
速度偏差積算部222では、点検位置制御部225からの点検区間情報に基づいて、速度偏差計算部221で求めた速度偏差の絶対値を順次積算する処理を行い、点検区間の速度偏差積算値εnを算出する。
【0066】
次に、異常判定部223は、点検区間ごとに算出された速度偏差積算値εnと、メモリ部224にあらかじめ記憶された点検区間ごとの基準値ε0nとの比較を行い、判定結果を判定結果通報部23を介して保守センターに知らせる。
【0067】
なお、ドア全開・全閉検知スイッチ26からの情報は、計算の開始、終了の情報として、速度偏差積算部222で処理してもよい。
【0068】
次に、先の図4を用いて、点検区間を係合区間と係合区間以外の区間とに分ける例を説明する。このように点検区間を設定すると、係合区間、係合区間以外の区間で、戸開時と戸閉時で異常の有無を点検することができる。この結果、戸開時または戸閉時のみ顕著に現れる異常に対して、より精度よく異常を検出することができる。
【0069】
また、基準となる速度偏差積算値が小さくなるように、区間を短くして点検しているため、異常により速度偏差積算値εnが変化したとき、基準値であるε0nとεnとの差が大きくなりやすい。このため、先の実施の形態2のように、戸開閉区間全体で判定するよりも、精度よく検出することができる。さらに、係合区間と係合区間以外で区間を区切って判定しているため、どの区間に異常が発生しているかも検知できる。
【0070】
なお、図4における判定区間については、係合部分とそれ以外の2つに区分する場合には限定されず、さらに細かい区間に分けてそれぞれに個別の基準値を設定し、判定してもよい。
【0071】
また、判定精度の向上の目的で、基準とする正常時の速度偏差積算値を小さくできるように、それぞれの区間について、戸開時または戸閉時のいずれか一方を選び、これらの区間をつなぎ合わせることで、全区間に関するドア開閉の異常検知を行うこともできる。
【0072】
以上のように、実施の形態3によれば、戸開または戸閉の区間を複数に分割してドアの異常を判定することで、異常検出精度の向上を図ることができる。さらに、どの区間で異常が発生したかを特定することもできる。
【0073】
実施の形態4.
本実施の形態4では、ドア制御装置による開閉制御に電流制限をかけ、ドアの異常を検知する精度を向上させる方法について説明する。図6は、本発明の実施の形態4におけるエレベータドアの点検装置の一例を示す全体構成図である。先の実施の形態3における図5の構成と比較すると、本実施の形態4における図6は、ドア制御装置21内に位置演算部215および電流制限制御部216をさらに備えている点が異なっている。そこで、これらの相違点を中心に、以下に説明する。
【0074】
位置演算部215は、エンコーダ24からのパルスに基づいてドア位置を計算し、ドア位置情報を生成する。また、電流制限制御部216は、電流制御部213の後段に設けられており、電流制御部213からの電流指令に対して、駆動モータ1に供給する電流値の制限を行っている。
【0075】
運転切換部20は、点検開閉を選択したときに、速度指令生成部211に対して点検開閉の速度指令を発生させる入力を与えると同時に、電流制限制御部216に対して駆動モータ1に供給する電流にドアの位置によって制限がかかるよう、ドア位置による電流制限値Imnを読み込ませる。
【0076】
また、電流制限制御部216は、位置演算部215からドア位置情報も入力する。そして、電流制限制御部216は、電流制御部213で演算された電流指令値と、位置演算部215で得られドア位置情報、および、ドア位置に対応する電流制限値Imnの情報を基に補正計算を行い、補正された電流指令補正値を駆動モータ1に送る。
【0077】
図7は、本発明の実施の形態4に係るエレベータドアの点検装置において、電流制限をかけることによる効果を示す説明図である。先の実施の形態1から3のエレベータのドア点検装置であれば、図7(a)に示すように、ドアに異常があり、駆動モータ1の実速度が減速すると、電流制御部213から駆動モータ1に供給する電流をI0から増やす指令が出され、駆動モータ1の実速度が速度指令値V0に合うように制御される。
【0078】
一方、本実施の形態4のように、電流制限をかける構成を備えることで、ドアに異常がないときは通常の点検開閉と変わらないが、ドアの異常によって負荷が設定トルク以上となると、図7(b)のように挙動することとなる。すなわち、駆動モータ1には電流制限値Im以上の電流が供給されないため、速度が遅くなったまま回復しない。そして、異常区間を抜けても、しばらくは速度指令値V0より実速度が遅い状態が続いた後、オーバーシュートにより速度指令値V0よりもモータ実速度が早い状態となる。
【0079】
また、ドアの異常による負荷がさらに大きい場合には、電流制限値Imnでは電流が不足し、ドアの動きが止まってしまう。その結果、速度偏差積算値εと基準値ε0の差が大きくなり、点検でドアの異常を検知する精度が向上する。
【0080】
なお、ドア位置によりあらかじめわかっている必要なトルクとは、ドアの加減速や、ドアクローザ、ドアを動かすために必要なトルクのことで、ドアの位置と動作方向で決まっており、計算や実測などでその大きさがわかっているもののことである。電流制限値Imnは、駆動モータ1の出力トルクがドア位置によって決まっている必要トルクに、適当な大きさの余裕を持たせた値、例えば、必要トルクの1.1倍や1.2倍等の係数を掛けた値を計算した電流値である。
【0081】
この駆動モータ1に供給する電流に制限値を設定する方法は、先の実施の形態1〜3と併用することで、点検での異常の検知精度を向上させることができる。
【0082】
以上のように、実施の形態4によれば、駆動モータを制御する際に電流制限をかける構成を備えることで、ドア点検用速度指令でドアを動かしたとき、設定トルク以上のトルクがかかるとドアの動きが止まったり、速度が遅くなったりする状態が顕著となる。この結果、モータ速度と点検用速度指令との差分の絶対値の和と基準値との比較において、異常が発生しているときの比較値の差が大きくなり、異常を見つけやすくすることができる。
【0083】
実施の形態5.
本実施の形態5では、点検時の制御ゲインを変更することで、ドアの異常を検知する精度を向上させる方法について説明する。図8は、本発明の実施の形態5におけるエレベータドアの点検装置の一例を示す全体構成図である。先の実施の形態1における図2の構成と比較すると、本実施の形態5における図8は、点検装置22内に点検制御ゲインメモリ部226をさらに備えている点が異なっている。そこで、この相違点を中心に、以下に説明する。
【0084】
点検制御ゲインメモリ部226には、点検開閉時に用いる制御ゲインが記憶されている。なお、点検装置22内のその他の構成による機能は、先の実施の形態1と同様であり、その詳細説明を省略する。
【0085】
本実施の形態5では、運転切換部20で通常開閉から点検開閉に切り換えられると、速度制御部212は、通常の戸開閉制御に用いていた制御ゲインから、点検制御ゲインメモリ部226から読み込んだ点検用の制御ゲインに変更する。
【0086】
一般に、通常の戸開閉に用いる制御ゲインは、戸開閉の速度指令への追従性と、ゴミづまり等の外乱による速度指令からの偏差を小さくすることを考慮して決められている。そのため、点検開閉時に通常の戸開閉に用いる制御ゲインを使うと、微小なゴミづまりなどの異常では速度偏差が小さくなることがある。
【0087】
そこで、本実施の形態5では、点検開閉に用いる制御ゲインを、通常の戸開閉に用いる制御ゲインとは異なる指標で設計し、点検制御ゲインメモリ部に記憶させておき、点検開閉時に用いている。
【0088】
具体的には、点検開閉に用いる制御ゲインとしては、点検用の戸開閉の速度指令への追従性は維持しつつ、ゴミづまり等の外乱が発生した場合に、速度指令からの偏差が大きくなる制御ゲインを用いる。
【0089】
以上のように、実施の形態5によれば、点検開閉時に通常の戸開閉時に用いる制御ゲインを点検用制御ゲインに換えて点検を行うことにより、点検開閉時にゴミづまり等の異常がある場合に、速度指令からの偏差が大きくなるとともに、異常を判定するための速度偏差積算値も大きくなり、微小な異常が見つけやすくなり、高精度な点検開閉を行うことができる。
【0090】
なお、上述した実施の形態5では、先の実施の形態1に対して制御ゲインの切換機能を追加する場合を説明したが、実施の形態2〜4に対して制御ゲインの切換機能を追加することも可能であり、同様の効果を得ることができる。
【0091】
また、図4に示したように、戸開閉時にかごドアと乗り場ドアが係合する位置では、速度指令との偏差が存在する。そのため、点検用制御ゲインに換えることで偏差が増大することが予想される。そこで、点検用制御ゲインを切り換える位置を戸開閉の全域ではなく、係合部以外に適用するように、区間を分け点検開閉を行ってもよい。
【符号の説明】
【0092】
1 駆動モータ、2 ドア装置、4 駆動ベルト、5 駆動プーリ、6 アイドラプーリ、7 かごドア、8 ハンガープレート、8a 駆動側ハンガープレート、8b 従動側ハンガープレート、9 かご敷居、10 戸の脚、11 把持部材、11a 駆動側把持部材、11b 従動側把持部材、12 ハンガーローラ、13 ハンガーレール、14 係合装置、14a 係合ベーン、16 駆動ローラ、20 運転切換部、21 ドア制御装置(ドア制御部)、211 速度指令生成部、212 速度制御部、213 電流制御部、214 速度演算部、215 位置演算部、216 電流制限制御部、22 点検装置(点検部)、221 速度偏差計算部、222 速度偏差積算部、223 異常判定部、224 メモリ部、225 点検位置制御部、226 点検制御ゲインメモリ部、23 判定結果通報部、24 エンコーダ、25 電流検出器、26 ドア全開・全閉検知スイッチ、26a ドア全閉検知スイッチ、26b ドア全開検知スイッチ。
【特許請求の範囲】
【請求項1】
エレベータドアの開閉異常を検出するためのエレベータドアの点検装置であって、
一定速度の点検用速度により駆動モータを速度制御することで開閉異常点検時における前記ドアの開閉動作を制御するドア制御部と、
前記ドア制御部による開閉動作中における前記駆動モータの実速度を所定のサンプリング間隔で抽出し、抽出した前記実速度と前記点検用速度との偏差を求め、前記開閉動作中の所定の点検区間における前記偏差の絶対値を積算することで速度偏差積算値を算出し、前記速度偏差積算値が所定の基準値を超えた場合にエレベータドアの開閉異常が発生したと判断する点検部と
を備えたことを特徴とするエレベータドアの点検装置。
【請求項2】
請求項1に記載のエレベータドアの点検装置において、
前記点検部は、ドアの開動作時と閉動作時において、それぞれ個別の点検区間として開動作用点検区間および閉動作用点検区間を有するとともに、それぞれ個別の基準値として開動作用基準値および閉動作用基準値を有し、前記開動作時と前記閉動作時で個別の判断指標によりエレベータドアの開閉異常を判断する
ことを特徴とするエレベータドアの点検装置。
【請求項3】
請求項2に記載のエレベータドアの点検装置において、
前記点検部は、前記開動作用点検区間および前記閉動作用点検区間を複数の区間に分割するとともに、分割した区間ごとに個別の基準値を有し、前記開動作時と前記閉動作時で分割した前記複数の区分ごとに個別の判断指標によりエレベータドアの開閉異常を判断する
ことを特徴とするエレベータドアの点検装置。
【請求項4】
請求項1ないし3のいずれか1項に記載のエレベータドアの点検装置において、
前記ドア制御部は、前記駆動モータの速度制御をする際に、前記エレベータドアの位置によってあらかじめ既知であるドア開閉時に必要なトルクに所定の余裕トルクを持たせたトルクで制限がかかるように、前記駆動モータに流す電流に制限をかける
ことを特徴とするエレベータドアの点検装置。
【請求項5】
請求項1ないし4のいずれか1項に記載のエレベータドアの点検装置において、
前記ドア制御部は、通常運転時に前記駆動モータの速度制御を行うための第1の制御ゲインと、前記開閉異常点検時に前記駆動モータの速度制御を行うための第2の制御ゲインを個別に有し、前記開閉異常点検時には前記第2の制御ゲインに切り換えて速度制御を行う
ことを特徴とするエレベータドアの点検装置。
【請求項6】
請求項5に記載のエレベータドアの点検装置において、
前記ドア制御部は、第2の制御ゲインとして、ゴミづまり等の外乱発生時に前記偏差が大きくなるように設定された制御ゲインを有する
ことを特徴とするエレベータドアの点検装置。
【請求項7】
一定速度の点検用速度により駆動モータを速度制御することで開閉異常点検時におけるエレベータドアの開閉動作を制御し、エレベータドアの開閉異常を検出するためのエレベータドアの点検方法であって、
前記開閉異常点検時の開閉動作中における前記駆動モータの実速度を所定のサンプリング間隔で抽出するステップと、
抽出した前記実速度と前記点検用速度との偏差を求め、前記開閉動作中の所定の点検区間における前記偏差の絶対値を積算することで速度偏差積算値を算出するステップと、
前記速度偏差積算値が所定の基準値を超えた場合にエレベータドアの開閉異常が発生したと判断するステップと
を備えたことを特徴とするエレベータドアの点検方法。
【請求項1】
エレベータドアの開閉異常を検出するためのエレベータドアの点検装置であって、
一定速度の点検用速度により駆動モータを速度制御することで開閉異常点検時における前記ドアの開閉動作を制御するドア制御部と、
前記ドア制御部による開閉動作中における前記駆動モータの実速度を所定のサンプリング間隔で抽出し、抽出した前記実速度と前記点検用速度との偏差を求め、前記開閉動作中の所定の点検区間における前記偏差の絶対値を積算することで速度偏差積算値を算出し、前記速度偏差積算値が所定の基準値を超えた場合にエレベータドアの開閉異常が発生したと判断する点検部と
を備えたことを特徴とするエレベータドアの点検装置。
【請求項2】
請求項1に記載のエレベータドアの点検装置において、
前記点検部は、ドアの開動作時と閉動作時において、それぞれ個別の点検区間として開動作用点検区間および閉動作用点検区間を有するとともに、それぞれ個別の基準値として開動作用基準値および閉動作用基準値を有し、前記開動作時と前記閉動作時で個別の判断指標によりエレベータドアの開閉異常を判断する
ことを特徴とするエレベータドアの点検装置。
【請求項3】
請求項2に記載のエレベータドアの点検装置において、
前記点検部は、前記開動作用点検区間および前記閉動作用点検区間を複数の区間に分割するとともに、分割した区間ごとに個別の基準値を有し、前記開動作時と前記閉動作時で分割した前記複数の区分ごとに個別の判断指標によりエレベータドアの開閉異常を判断する
ことを特徴とするエレベータドアの点検装置。
【請求項4】
請求項1ないし3のいずれか1項に記載のエレベータドアの点検装置において、
前記ドア制御部は、前記駆動モータの速度制御をする際に、前記エレベータドアの位置によってあらかじめ既知であるドア開閉時に必要なトルクに所定の余裕トルクを持たせたトルクで制限がかかるように、前記駆動モータに流す電流に制限をかける
ことを特徴とするエレベータドアの点検装置。
【請求項5】
請求項1ないし4のいずれか1項に記載のエレベータドアの点検装置において、
前記ドア制御部は、通常運転時に前記駆動モータの速度制御を行うための第1の制御ゲインと、前記開閉異常点検時に前記駆動モータの速度制御を行うための第2の制御ゲインを個別に有し、前記開閉異常点検時には前記第2の制御ゲインに切り換えて速度制御を行う
ことを特徴とするエレベータドアの点検装置。
【請求項6】
請求項5に記載のエレベータドアの点検装置において、
前記ドア制御部は、第2の制御ゲインとして、ゴミづまり等の外乱発生時に前記偏差が大きくなるように設定された制御ゲインを有する
ことを特徴とするエレベータドアの点検装置。
【請求項7】
一定速度の点検用速度により駆動モータを速度制御することで開閉異常点検時におけるエレベータドアの開閉動作を制御し、エレベータドアの開閉異常を検出するためのエレベータドアの点検方法であって、
前記開閉異常点検時の開閉動作中における前記駆動モータの実速度を所定のサンプリング間隔で抽出するステップと、
抽出した前記実速度と前記点検用速度との偏差を求め、前記開閉動作中の所定の点検区間における前記偏差の絶対値を積算することで速度偏差積算値を算出するステップと、
前記速度偏差積算値が所定の基準値を超えた場合にエレベータドアの開閉異常が発生したと判断するステップと
を備えたことを特徴とするエレベータドアの点検方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−18577(P2013−18577A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2011−151439(P2011−151439)
【出願日】平成23年7月8日(2011.7.8)
【出願人】(000006013)三菱電機株式会社 (33,312)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願日】平成23年7月8日(2011.7.8)
【出願人】(000006013)三菱電機株式会社 (33,312)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
[ Back to top ]