
エレベータ制御装置
【課題】着床ずれ状態を自動的に検出してカゴを修正運転することにより、利用者の不具合の発生を確実に解消したエレベータ制御装置を得る。
【解決手段】カゴ側敷居10に設けられて光信号L1を出射する投光器11と、乗場側敷居20に設けられ、着床時に投光器11と対向して光信号L1を受光する受光器22と、乗場側敷居20に設けられて光信号L2を出射する投光器21と、カゴ側敷居10に設けられ、着床時に投光器21と対向して光信号L2を受光する受光器12とを備えている。制御手段は、カゴの通常走行による乗場への着床時に、受光器22、12が光信号L1、L2を受光している場合には戸開動作を行い、受光器22または12が、光信号L1、L2を受光していない場合には、カゴを低速で上昇または下降運転させて、受光器22、12が光信号L1、L2を受光した時点で戸開動作を行う。
【解決手段】カゴ側敷居10に設けられて光信号L1を出射する投光器11と、乗場側敷居20に設けられ、着床時に投光器11と対向して光信号L1を受光する受光器22と、乗場側敷居20に設けられて光信号L2を出射する投光器21と、カゴ側敷居10に設けられ、着床時に投光器21と対向して光信号L2を受光する受光器12とを備えている。制御手段は、カゴの通常走行による乗場への着床時に、受光器22、12が光信号L1、L2を受光している場合には戸開動作を行い、受光器22または12が、光信号L1、L2を受光していない場合には、カゴを低速で上昇または下降運転させて、受光器22、12が光信号L1、L2を受光した時点で戸開動作を行う。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、乗場に対するエレベータカゴ(以下、単に「カゴ」という)の着床ずれ状態を検出可能なエレベータ制御装置に関するものである。
【背景技術】
【0002】
従来のエレベータ制御装置においては、階床ごとの乗場のカゴ着床位置にドアゾーンプレートが取り付けられており、乗場へのカゴ着床時に、ドアゾーンプレートの範囲内にカゴが停止していれば、正常着床状態と見なして戸開動作を行うようになっている。
【0003】
しかしながら、ドアゾーンプレートのサイズは、特に古い機種の場合には、低速自動運転時の誤差を考慮して、±250mm程度に設定されているので、ドアゾーンプレートの範囲内で着床誤差が大きい場合(±250mm程度)であっても、特に注意喚起が行われることもなく戸開が行われるので、最悪の場合には、段差に気づかない利用者が乗降中につまずく可能性があり、利用者の乗降が容易でないという不具合があった。
【0004】
そこで、上記のような不具合を解消することを目的として、従来から、カゴおよび乗場に投光器および反射鏡を取り付け、着床誤差が発生した場合には、投光器からの光を反射鏡で反射させることにより、着床ずれ状態(段差の発生状態)を利用者に気づかせるエレベータ制御装置が提案されている(たとえば、特許文献1参照)。
【0005】
【特許文献1】特開平7−252065号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
従来のエレベータ制御装置では、特許文献1の場合には、利用者に対して反射光で段差発生状態を報知しているものの、段差発生状態を解消しているわけではないので、利用者の乗降中の不具合を十分に解消することができないという課題があった。
特に、視覚障害者に対しては、段差発生状態を報知することもできないので、投光器および反射鏡の設備が無意味になるという課題があった。
【0007】
この発明は、上記のような課題を解決するためになされたものであり、着床ずれ(段差発生)状態を自動的に検出するとともに、着床誤差発生時に自動的にカゴを修正運転して段差を抑制することにより、利用者の不具合の発生を確実に解消することのできるエレベータ制御装置を得ることを目的とする。
【課題を解決するための手段】
【0008】
この発明によるエレベータ制御装置は、カゴを目的階へ昇降運転させた後に着床運転させてカゴ側敷居の床面と乗場側敷居の床面との段差を調整するとともに、カゴの着床時にカゴドアおよび乗場ドアの戸開動作を制御する制御手段と、カゴ側敷居に設けられて第1の光信号を出射するカゴ側投光器と、乗場側敷居に設けられ、着床時にカゴ側投光器と対向して第1の光信号を受光する乗場側受光器と、乗場側敷居に設けられて第2の光信号を出射する乗場側投光器と、カゴ側敷居に設けられ、着床時に乗場側投光器と対向して第2の光信号を受光するカゴ側受光器とを備え、制御手段は、カゴの通常走行による乗場への着床時に、乗場側受光器およびカゴ側受光器が、それぞれ第1および第2の光信号を受光している場合には戸開動作を行い、乗場側受光器またはカゴ側受光器の一方が、第1または第2の光信号を受光していない場合には、カゴを低速で上昇または下降運転させて、乗場側受光器およびカゴ側受光器が第1および第2の光信号を受光した時点で戸開動作を行うものである。
【発明の効果】
【0009】
この発明によれば、乗場へのカゴ着床時に、着床ずれ状態を検出して着床誤差を自動的に解消することができる。
【発明を実施するための最良の形態】
【0010】
実施の形態1.
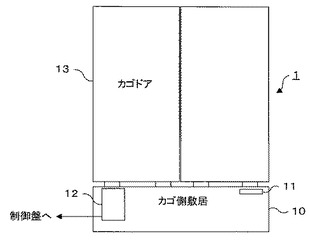
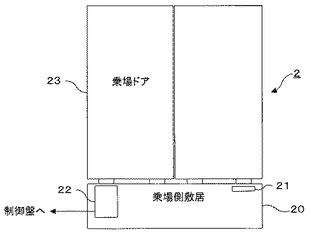
図1および図2はこの発明の実施の形態1に係るエレベータ制御装置をドアおよび敷居とともに示す正面図であり、図1は乗場側からカゴ1を見た場合のカゴ側敷居10およびカゴドア13の外観を示し、図2はカゴ側から乗場2を見た場合の乗場側敷居20および乗場ドア23の外観を示している。
【0011】
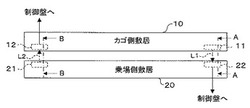
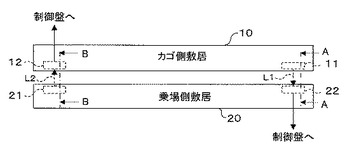
図3は図1および図2内のカゴ側敷居10および乗場側敷居20の対向状態を示す平面図である。
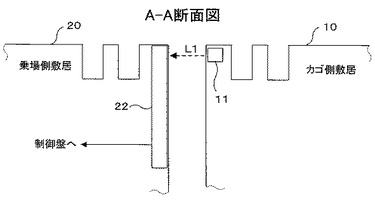
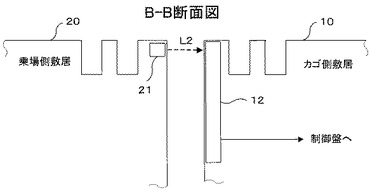
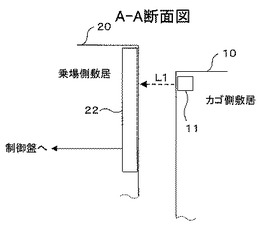
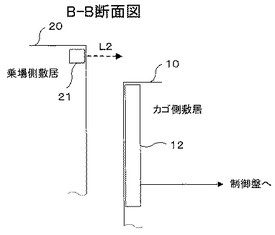
図4および図5は正常着床状態でのカゴ側敷居10および乗場側敷居20の対向状態を拡大して示す断面図であり、図4は図3内のA−A矢印から見た断面図、図5は図3内のB−B矢印から見た断面図である。
【0012】
図1〜図5において、カゴ側敷居10には、第1の光信号(以下、単に「光信号」という)L1を出射するカゴ側投光器(以下、単に「投光器」という)11と、カゴ1の走行方向下側(下方方向)に延長された形状を有するカゴ側受光器(以下、単に「受光器」という)12と、が1個ずつ設けられている。
【0013】
同様に、乗場側敷居20には、第2の光信号(以下、単に「光信号」という)L2を出射する乗場側投光器(以下、単に「投光器」という)21と、カゴ1の走行方向下側(下方方向)に延長された形状を有する乗場側受光器(以下、単に「受光器」という)22と、が1個ずつ設けられている。
投光器11および受光器22は、乗場2へのカゴ1の着床時に対向するように配置され、投光器21および受光器12は、乗場2へのカゴ1の着床時に対向するように配置されている。
【0014】
すなわち、図1〜図4に示すように、投光器11は、カゴ1の正規着床時に受光器22の上端に対向するように、カゴ側敷居10の水平方向の一方の端面に設けられている。
また、図1および図3に示すように、受光器12は、カゴ側敷居10の水平方向の他方の端面に設けられている。
【0015】
一方、図1〜図5に示すように、投光器21は、正規着床時に受光器12の上端に対向するように、乗場側敷居20の水平方向の一方の端面に設けられている。
また、図1および図3に示すように、受光器22は、乗場側敷居10の水平方向の他方の端面に設けられている。
【0016】
投光器11、21は、乗場2へのカゴ1の通常着床時に、図示しない制御盤(マイクロコンピュータを備えた制御手段)の制御下で駆動されて、受光器22、12に対して光信号L1、L2を出射する。
受光器12、22からの受光信号は、カゴ1を運転制御する制御盤(図示せず)に入力されている。
【0017】
制御盤は、サービス階床の乗場2(目的階)に向けてカゴ1を昇降運転させた後に、カゴ1を着床運転させてカゴ側敷居10を乗場側敷居20に着床させ、カゴ側敷居10の床面と乗場側敷居20の床面との段差を調整するとともに、乗場2へのカゴ1の着床時にカゴドア13および乗場ドア23の戸開動作を制御する。
【0018】
図4に示すように、カゴ1が乗場2の正規位置に着床した場合には、カゴ側敷居10に設けられた投光器11からの光信号L1は、乗場側敷居20に設けられた受光器22に受光される。
また、このとき、図5に示すように、乗場側敷居20に設けられた投光器21からの光信号L2は、カゴ側敷居10に設けられた受光器12に受光される。
【0019】
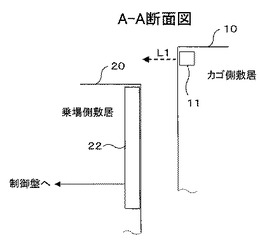
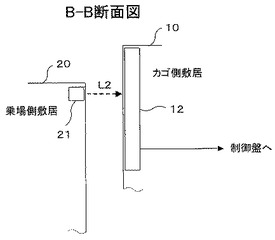
一方、着床ずれ状態が発生し、図6および図7(A−A断面図およびB−B断面図)に示すように、カゴ側敷居10が乗場側敷居20よりも上方にずれた場合には、受光器22が光信号L1を受光することができなくなる。
すなわち、図6、図7において、カゴ側敷居10の受光器12は、乗場側敷居20からの光信号L2を受光することができるものの、乗場側敷居20の受光器22は、カゴ側敷居10からの光信号L1を受光することができない。
【0020】
逆に、図8および図9に示すように、カゴ側敷居10が乗場側敷居20よりも下方にずれた場合には、乗場側敷居20の受光器22は、カゴ側敷居10からの光信号L1を受光することができるものの、カゴ側敷居10の受光器12は、乗場側敷居20からの光信号L2を受光することができない。
【0021】
すなわち、カゴ側敷居10および乗場側敷居20の下部において、投光器11および受光器22と、投光器21および受光器12とがそれぞれ対を形成するように設けられているので、通常着床時におけるカゴ1の位置が乗場2の位置に対して高い場合(図6、図7)には、乗場側敷居20の受光器22に光信号L1が受光されずに、カゴ側敷居10の受光器12のみに光信号L2が受光される。
逆に、乗場2の位置がカゴ1の位置に対して高い場合(図8、図9)には、カゴ側敷居10の受光器12に光信号L2が受光されずに、乗場側敷居20の受光器22のみに光信号L1が受光される。
【0022】
次に、図1〜図9とともに、図10のフローチャートを参照しながら、この発明の実施の形態1の制御盤による着床誤差検出処理および着床修正処理について説明する。
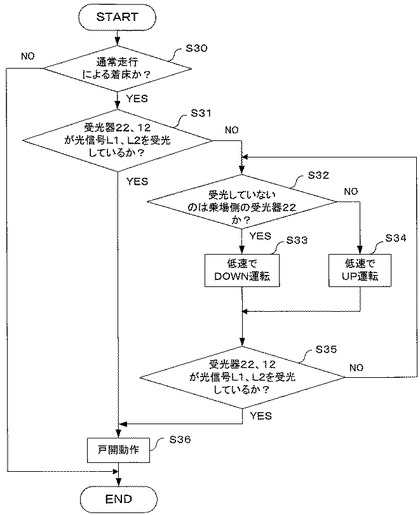
図10において、制御盤は、まず、カゴ1の通常走行による着床処理であるか否かを判定し(ステップS30)、通常走行による着床処理でない(すなわち、NO)と判定されれば、直ちに図10の処理ルーチンを終了する。
【0023】
一方、ステップS30において、通常走行による着床処理である(すなわち、YES)と判定されれば、続いて、受光器22、12がそれぞれ光信号L1、L2を受光している(正常着床状態)か否かを判定する(ステップS31)。
ステップS31において、受光器22、12がそれぞれ光信号L1、L2を受光している(すなわち、YES)と判定されれば、正常着床状態なので戸開動作を行い(ステップS36)、図10の処理ルーチンを終了する。
【0024】
一方、ステップS31において、受光器22、12の一方が光信号L1またはL2を受光していない(すなわち、NO)と判定されれば、続いて、受光していないのが乗場側の受光器22であるか否かを判定する(ステップS32)。
なお、通常走行による着床時に、受光器22、12の両方が受光しない状態が生じないように、各受光器22、12は延長形状を有している。
【0025】
ステップS32において、受光器22が受光していない(すなわち、YES)と判定されれば、乗場側敷居20に対してカゴ側敷居10が上方にずれた状態(図6および図7参照)にあるので、カゴ1を低速で下降(DOWN)運転させて(ステップS33)、ステップS31と同様に、受光器22、12がそれぞれ光信号L1、L2を受光しているか否かを判定する(ステップS35)。
【0026】
一方、ステップS32において、受光器12が受光していない(すなわち、NO)と判定されれば、乗場側敷居20に対してカゴ側敷居10が下方にずれた状態(図8および図10参照)にあるので、カゴ1を低速で上昇(UP)運転させて(ステップS34)、ステップS35に進む。
【0027】
ステップS35において、依然として受光器22、12の一方が光信号L1またはL2を受光していない(すなわち、NO)と判定されれば、ステップS32に戻り、ステップS32〜S35を繰り返し実行する。
一方、ステップS35において、受光器22、12がそれぞれ光信号L1、L2を受光している(すなわち、YES)と判定されれば、戸開動作を行い(ステップS36)、図10の処理ルーチンを終了する。
【0028】
このように、制御盤は、受光器22、12のいずれかに光信号L1、L2が受光されない場合には、直ちに戸開動作を行うことなく、着床ずれ状態が修正される方向にカゴ1を低速運転走行させて、受光器22、12の両方に光信号L1、L2が受光される状態になった時点でカゴ1を停止させて戸開動作を行う。
【0029】
以上のように、この発明の実施の形態1に係るエレベータ制御装置は、サービス階床の乗場2(目的階)に向けてカゴ1を昇降運転させた後、カゴ1を着床運転させてカゴ側敷居10の床面と乗場側敷居20の床面との段差を調整するとともに、乗場2へのカゴ1の着床時にカゴドア13および乗場ドア23の戸開動作を制御する制御盤(制御手段)と、カゴ側敷居10に設けられて光信号L1を出射する投光器11と、乗場側敷居20に設けられ、着床時に投光器11と対向して光信号L1を受光する受光器22と、乗場側敷居20に設けられて光信号L2を出射する投光器21と、カゴ側敷居10に設けられ、着床時に投光器21と対向して光信号L2を受光する受光器12とを備えている。
【0030】
制御盤は、カゴ1の通常走行による乗場2への着床時に、受光器22、12が、それぞれ光信号L1、L2を受光している場合には戸開動作を行い、受光器22または12が、光信号L1、L2を受光していない場合には、カゴ1を低速で上昇または下降運転させて、受光器22、12が光信号L1、L2を受光した時点で戸開動作を行う。
【0031】
具体的には、投光器11は、カゴ1の正規着床時に受光器22の上端に対向するように、カゴ側敷居10の水平方向の一方の端面に設けられ、受光器12は、カゴ側敷居10の水平方向の他方の端面に設けられるとともに、下方方向に延長された形状を有する。
同様に、投光器21は、正規着床時に受光器12の上端に対向するように、乗場側敷居20の水平方向の一方の端面に設けられ、受光器22は、乗場側敷居20の水平方向の他方の端面に設けられるとともに、下方方向に延長された形状を有する。
【0032】
制御盤は、受光器22が光信号L1を受光していない場合には、カゴ1を低速で下降運転させ、受光器22が光信号L1を受光した時点で戸開動作を行う。
また、制御盤は、受光器12が光信号L2を受光していない場合には、カゴ1を低速で上昇運転させ、受光器12が光信号L2を受光した時点で戸開動作を行う。
【0033】
これにより、着床ずれ状態の発生時(戸開不良時)には、正規着床位置までカゴ1を低速走行させ、着床ずれ状態(着床段差)が解消した時点で戸開動作が行われるので、条項時の利用者の不具合(つまずきによる転倒など)の発生を抑制することができる。
【0034】
すなわち、経年劣化などにより、特に古いエレベータに大きな着床ずれ状態が発生した場合でも、光信号L1、L2の送受信時での受光器22、12の受信状態により、乗場2に対するカゴ1の着床状態が、正常状態(図4、図5)か、上方向への着床ずれ状態(図6、図7)か、下方向への着床ずれ状態(図8、図9)かを自動的に検出することができる。
【0035】
また、正常状態の場合には、そのまま戸開動作を行い、上下方向への着床ずれ状態の場合には、戸開動作を行わずに、着床ずれ位置から正規着床位置への低速運転指令を出力して、正規着床位置までカゴ1を修正運転させてから戸開動作を行うことができる。
これにより、簡単な構成で、着床ずれ状態による利用者の乗降時における不具合を軽減することができる。
【0036】
さらに、制御盤は、通常走行によるカゴ着床時のみに投光器11、21を駆動し、投光器11、21から受光器22、12に対して光信号L1、L2を出射させるので、無駄な電力消費を抑制することができる。
【0037】
実施の形態2.
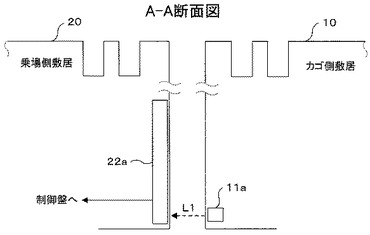
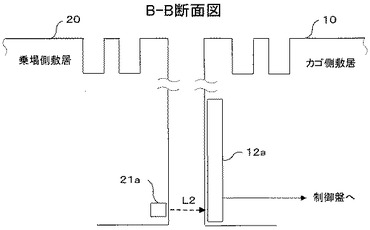
なお、上記実施の形態1(図1〜図10)では、各投光器11、21を各敷居10、20の上端に設け、各受光器12、22を下方方向に延長した形状としたが、逆に、図11および図12のように、各投光器11a、21aを各敷居10、20の下端に設け、各受光器12a、22aを上方方向に延長した形状としてもよい。
【0038】
図11および図12はこの発明の実施の形態2による正常着床状態での断面図であり、図11は図3内のA−A矢印から見た断面図であり、図12は図3内のB−B矢印から見た断面図である。
各図において、前述(図4、図5参照)と同様のものについては、前述と同一符号を付して、または符号の後に「a」を付して詳述を省略する。
【0039】
図11において、投光器11aは、カゴ1の正規着床時に受光器22の下端に対向するように、カゴ側敷居10の水平方向の一方の端面に設けられ、受光器12aは、カゴ側敷居10の水平方向の他方の端面に設けられるとともに、上方方向に延長された形状を有する。
同様に、図12において、投光器21aは、正規着床時に受光器12aの下端に対向するように、乗場側敷居20の水平方向の一方の端面に設けられ、受光器22aは、乗場側敷居20の水平方向の他方の端面に設けられるとともに、上方方向に延長された形状を有する。
【0040】
この場合、制御盤は、受光器22aが光信号L1を受光していない場合には、カゴ1を低速で上昇運転させ、受光器22aが第1の光信号を受光した時点で戸開動作を行う。
また、制御盤は、受光器12aが光信号L2を受光していない場合には、カゴ1を低速で下降運転させ、受光器12aが光信号L2を受光した時点で戸開動作を行う。
【0041】
これにより、カゴ1の着床誤差は自動的に適性調整され、各敷居10、20の床面間の段差は解消される。
したがって、この発明の実施の形態2(図11、図12)のように、各敷居10、20の下端部にカゴ着床誤差検出部を設けた場合も、前述と同等の作用効果を奏する。
【図面の簡単な説明】
【0042】
【図1】この発明の実施の形態1に係るエレベータ制御装置のカゴ側の構成を示す正面図である。
【図2】この発明の実施の形態1に係るエレベータ制御装置の乗場側の構成を示す正面図である。
【図3】この発明の実施の形態1によるカゴ側敷居および乗場側敷居の対向状態を示す平面図である。
【図4】図3内のA−A矢印から見た正常着床状態での断面図である。
【図5】図3内のB−B矢印から見た正常着床状態での断面図である。
【図6】図3内のA−A矢印から見たカゴ上方ずれ状態での断面図である。
【図7】図3内のB−B矢印から見たカゴ上方ずれ状態での断面図である。
【図8】図3内のA−A矢印から見たカゴ下方ずれ状態での断面図である。
【図9】図3内のB−B矢印から見たカゴ下方ずれ状態での断面図である。
【図10】この発明の実施の形態1に係る制御盤の処理動作を示すフローチャートである。
【図11】この発明の実施の形態2による図3内のA−A矢印から見た正常着床状態での断面図である。
【図12】この発明の実施の形態2による図3内のB−B矢印から見た正常着床状態での断面図である。
【符号の説明】
【0043】
1 カゴ、2 乗場、10 カゴ側敷居、11、11a カゴ側投光器、12、12a カゴ側受光器、13 カゴドア、20 乗場側敷居、21、21a 乗場側投光器、22、22a 乗場側受光器、23 乗場ドア、L1 第1の光信号、L2 第2の光信号。
【技術分野】
【0001】
この発明は、乗場に対するエレベータカゴ(以下、単に「カゴ」という)の着床ずれ状態を検出可能なエレベータ制御装置に関するものである。
【背景技術】
【0002】
従来のエレベータ制御装置においては、階床ごとの乗場のカゴ着床位置にドアゾーンプレートが取り付けられており、乗場へのカゴ着床時に、ドアゾーンプレートの範囲内にカゴが停止していれば、正常着床状態と見なして戸開動作を行うようになっている。
【0003】
しかしながら、ドアゾーンプレートのサイズは、特に古い機種の場合には、低速自動運転時の誤差を考慮して、±250mm程度に設定されているので、ドアゾーンプレートの範囲内で着床誤差が大きい場合(±250mm程度)であっても、特に注意喚起が行われることもなく戸開が行われるので、最悪の場合には、段差に気づかない利用者が乗降中につまずく可能性があり、利用者の乗降が容易でないという不具合があった。
【0004】
そこで、上記のような不具合を解消することを目的として、従来から、カゴおよび乗場に投光器および反射鏡を取り付け、着床誤差が発生した場合には、投光器からの光を反射鏡で反射させることにより、着床ずれ状態(段差の発生状態)を利用者に気づかせるエレベータ制御装置が提案されている(たとえば、特許文献1参照)。
【0005】
【特許文献1】特開平7−252065号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
従来のエレベータ制御装置では、特許文献1の場合には、利用者に対して反射光で段差発生状態を報知しているものの、段差発生状態を解消しているわけではないので、利用者の乗降中の不具合を十分に解消することができないという課題があった。
特に、視覚障害者に対しては、段差発生状態を報知することもできないので、投光器および反射鏡の設備が無意味になるという課題があった。
【0007】
この発明は、上記のような課題を解決するためになされたものであり、着床ずれ(段差発生)状態を自動的に検出するとともに、着床誤差発生時に自動的にカゴを修正運転して段差を抑制することにより、利用者の不具合の発生を確実に解消することのできるエレベータ制御装置を得ることを目的とする。
【課題を解決するための手段】
【0008】
この発明によるエレベータ制御装置は、カゴを目的階へ昇降運転させた後に着床運転させてカゴ側敷居の床面と乗場側敷居の床面との段差を調整するとともに、カゴの着床時にカゴドアおよび乗場ドアの戸開動作を制御する制御手段と、カゴ側敷居に設けられて第1の光信号を出射するカゴ側投光器と、乗場側敷居に設けられ、着床時にカゴ側投光器と対向して第1の光信号を受光する乗場側受光器と、乗場側敷居に設けられて第2の光信号を出射する乗場側投光器と、カゴ側敷居に設けられ、着床時に乗場側投光器と対向して第2の光信号を受光するカゴ側受光器とを備え、制御手段は、カゴの通常走行による乗場への着床時に、乗場側受光器およびカゴ側受光器が、それぞれ第1および第2の光信号を受光している場合には戸開動作を行い、乗場側受光器またはカゴ側受光器の一方が、第1または第2の光信号を受光していない場合には、カゴを低速で上昇または下降運転させて、乗場側受光器およびカゴ側受光器が第1および第2の光信号を受光した時点で戸開動作を行うものである。
【発明の効果】
【0009】
この発明によれば、乗場へのカゴ着床時に、着床ずれ状態を検出して着床誤差を自動的に解消することができる。
【発明を実施するための最良の形態】
【0010】
実施の形態1.
図1および図2はこの発明の実施の形態1に係るエレベータ制御装置をドアおよび敷居とともに示す正面図であり、図1は乗場側からカゴ1を見た場合のカゴ側敷居10およびカゴドア13の外観を示し、図2はカゴ側から乗場2を見た場合の乗場側敷居20および乗場ドア23の外観を示している。
【0011】
図3は図1および図2内のカゴ側敷居10および乗場側敷居20の対向状態を示す平面図である。
図4および図5は正常着床状態でのカゴ側敷居10および乗場側敷居20の対向状態を拡大して示す断面図であり、図4は図3内のA−A矢印から見た断面図、図5は図3内のB−B矢印から見た断面図である。
【0012】
図1〜図5において、カゴ側敷居10には、第1の光信号(以下、単に「光信号」という)L1を出射するカゴ側投光器(以下、単に「投光器」という)11と、カゴ1の走行方向下側(下方方向)に延長された形状を有するカゴ側受光器(以下、単に「受光器」という)12と、が1個ずつ設けられている。
【0013】
同様に、乗場側敷居20には、第2の光信号(以下、単に「光信号」という)L2を出射する乗場側投光器(以下、単に「投光器」という)21と、カゴ1の走行方向下側(下方方向)に延長された形状を有する乗場側受光器(以下、単に「受光器」という)22と、が1個ずつ設けられている。
投光器11および受光器22は、乗場2へのカゴ1の着床時に対向するように配置され、投光器21および受光器12は、乗場2へのカゴ1の着床時に対向するように配置されている。
【0014】
すなわち、図1〜図4に示すように、投光器11は、カゴ1の正規着床時に受光器22の上端に対向するように、カゴ側敷居10の水平方向の一方の端面に設けられている。
また、図1および図3に示すように、受光器12は、カゴ側敷居10の水平方向の他方の端面に設けられている。
【0015】
一方、図1〜図5に示すように、投光器21は、正規着床時に受光器12の上端に対向するように、乗場側敷居20の水平方向の一方の端面に設けられている。
また、図1および図3に示すように、受光器22は、乗場側敷居10の水平方向の他方の端面に設けられている。
【0016】
投光器11、21は、乗場2へのカゴ1の通常着床時に、図示しない制御盤(マイクロコンピュータを備えた制御手段)の制御下で駆動されて、受光器22、12に対して光信号L1、L2を出射する。
受光器12、22からの受光信号は、カゴ1を運転制御する制御盤(図示せず)に入力されている。
【0017】
制御盤は、サービス階床の乗場2(目的階)に向けてカゴ1を昇降運転させた後に、カゴ1を着床運転させてカゴ側敷居10を乗場側敷居20に着床させ、カゴ側敷居10の床面と乗場側敷居20の床面との段差を調整するとともに、乗場2へのカゴ1の着床時にカゴドア13および乗場ドア23の戸開動作を制御する。
【0018】
図4に示すように、カゴ1が乗場2の正規位置に着床した場合には、カゴ側敷居10に設けられた投光器11からの光信号L1は、乗場側敷居20に設けられた受光器22に受光される。
また、このとき、図5に示すように、乗場側敷居20に設けられた投光器21からの光信号L2は、カゴ側敷居10に設けられた受光器12に受光される。
【0019】
一方、着床ずれ状態が発生し、図6および図7(A−A断面図およびB−B断面図)に示すように、カゴ側敷居10が乗場側敷居20よりも上方にずれた場合には、受光器22が光信号L1を受光することができなくなる。
すなわち、図6、図7において、カゴ側敷居10の受光器12は、乗場側敷居20からの光信号L2を受光することができるものの、乗場側敷居20の受光器22は、カゴ側敷居10からの光信号L1を受光することができない。
【0020】
逆に、図8および図9に示すように、カゴ側敷居10が乗場側敷居20よりも下方にずれた場合には、乗場側敷居20の受光器22は、カゴ側敷居10からの光信号L1を受光することができるものの、カゴ側敷居10の受光器12は、乗場側敷居20からの光信号L2を受光することができない。
【0021】
すなわち、カゴ側敷居10および乗場側敷居20の下部において、投光器11および受光器22と、投光器21および受光器12とがそれぞれ対を形成するように設けられているので、通常着床時におけるカゴ1の位置が乗場2の位置に対して高い場合(図6、図7)には、乗場側敷居20の受光器22に光信号L1が受光されずに、カゴ側敷居10の受光器12のみに光信号L2が受光される。
逆に、乗場2の位置がカゴ1の位置に対して高い場合(図8、図9)には、カゴ側敷居10の受光器12に光信号L2が受光されずに、乗場側敷居20の受光器22のみに光信号L1が受光される。
【0022】
次に、図1〜図9とともに、図10のフローチャートを参照しながら、この発明の実施の形態1の制御盤による着床誤差検出処理および着床修正処理について説明する。
図10において、制御盤は、まず、カゴ1の通常走行による着床処理であるか否かを判定し(ステップS30)、通常走行による着床処理でない(すなわち、NO)と判定されれば、直ちに図10の処理ルーチンを終了する。
【0023】
一方、ステップS30において、通常走行による着床処理である(すなわち、YES)と判定されれば、続いて、受光器22、12がそれぞれ光信号L1、L2を受光している(正常着床状態)か否かを判定する(ステップS31)。
ステップS31において、受光器22、12がそれぞれ光信号L1、L2を受光している(すなわち、YES)と判定されれば、正常着床状態なので戸開動作を行い(ステップS36)、図10の処理ルーチンを終了する。
【0024】
一方、ステップS31において、受光器22、12の一方が光信号L1またはL2を受光していない(すなわち、NO)と判定されれば、続いて、受光していないのが乗場側の受光器22であるか否かを判定する(ステップS32)。
なお、通常走行による着床時に、受光器22、12の両方が受光しない状態が生じないように、各受光器22、12は延長形状を有している。
【0025】
ステップS32において、受光器22が受光していない(すなわち、YES)と判定されれば、乗場側敷居20に対してカゴ側敷居10が上方にずれた状態(図6および図7参照)にあるので、カゴ1を低速で下降(DOWN)運転させて(ステップS33)、ステップS31と同様に、受光器22、12がそれぞれ光信号L1、L2を受光しているか否かを判定する(ステップS35)。
【0026】
一方、ステップS32において、受光器12が受光していない(すなわち、NO)と判定されれば、乗場側敷居20に対してカゴ側敷居10が下方にずれた状態(図8および図10参照)にあるので、カゴ1を低速で上昇(UP)運転させて(ステップS34)、ステップS35に進む。
【0027】
ステップS35において、依然として受光器22、12の一方が光信号L1またはL2を受光していない(すなわち、NO)と判定されれば、ステップS32に戻り、ステップS32〜S35を繰り返し実行する。
一方、ステップS35において、受光器22、12がそれぞれ光信号L1、L2を受光している(すなわち、YES)と判定されれば、戸開動作を行い(ステップS36)、図10の処理ルーチンを終了する。
【0028】
このように、制御盤は、受光器22、12のいずれかに光信号L1、L2が受光されない場合には、直ちに戸開動作を行うことなく、着床ずれ状態が修正される方向にカゴ1を低速運転走行させて、受光器22、12の両方に光信号L1、L2が受光される状態になった時点でカゴ1を停止させて戸開動作を行う。
【0029】
以上のように、この発明の実施の形態1に係るエレベータ制御装置は、サービス階床の乗場2(目的階)に向けてカゴ1を昇降運転させた後、カゴ1を着床運転させてカゴ側敷居10の床面と乗場側敷居20の床面との段差を調整するとともに、乗場2へのカゴ1の着床時にカゴドア13および乗場ドア23の戸開動作を制御する制御盤(制御手段)と、カゴ側敷居10に設けられて光信号L1を出射する投光器11と、乗場側敷居20に設けられ、着床時に投光器11と対向して光信号L1を受光する受光器22と、乗場側敷居20に設けられて光信号L2を出射する投光器21と、カゴ側敷居10に設けられ、着床時に投光器21と対向して光信号L2を受光する受光器12とを備えている。
【0030】
制御盤は、カゴ1の通常走行による乗場2への着床時に、受光器22、12が、それぞれ光信号L1、L2を受光している場合には戸開動作を行い、受光器22または12が、光信号L1、L2を受光していない場合には、カゴ1を低速で上昇または下降運転させて、受光器22、12が光信号L1、L2を受光した時点で戸開動作を行う。
【0031】
具体的には、投光器11は、カゴ1の正規着床時に受光器22の上端に対向するように、カゴ側敷居10の水平方向の一方の端面に設けられ、受光器12は、カゴ側敷居10の水平方向の他方の端面に設けられるとともに、下方方向に延長された形状を有する。
同様に、投光器21は、正規着床時に受光器12の上端に対向するように、乗場側敷居20の水平方向の一方の端面に設けられ、受光器22は、乗場側敷居20の水平方向の他方の端面に設けられるとともに、下方方向に延長された形状を有する。
【0032】
制御盤は、受光器22が光信号L1を受光していない場合には、カゴ1を低速で下降運転させ、受光器22が光信号L1を受光した時点で戸開動作を行う。
また、制御盤は、受光器12が光信号L2を受光していない場合には、カゴ1を低速で上昇運転させ、受光器12が光信号L2を受光した時点で戸開動作を行う。
【0033】
これにより、着床ずれ状態の発生時(戸開不良時)には、正規着床位置までカゴ1を低速走行させ、着床ずれ状態(着床段差)が解消した時点で戸開動作が行われるので、条項時の利用者の不具合(つまずきによる転倒など)の発生を抑制することができる。
【0034】
すなわち、経年劣化などにより、特に古いエレベータに大きな着床ずれ状態が発生した場合でも、光信号L1、L2の送受信時での受光器22、12の受信状態により、乗場2に対するカゴ1の着床状態が、正常状態(図4、図5)か、上方向への着床ずれ状態(図6、図7)か、下方向への着床ずれ状態(図8、図9)かを自動的に検出することができる。
【0035】
また、正常状態の場合には、そのまま戸開動作を行い、上下方向への着床ずれ状態の場合には、戸開動作を行わずに、着床ずれ位置から正規着床位置への低速運転指令を出力して、正規着床位置までカゴ1を修正運転させてから戸開動作を行うことができる。
これにより、簡単な構成で、着床ずれ状態による利用者の乗降時における不具合を軽減することができる。
【0036】
さらに、制御盤は、通常走行によるカゴ着床時のみに投光器11、21を駆動し、投光器11、21から受光器22、12に対して光信号L1、L2を出射させるので、無駄な電力消費を抑制することができる。
【0037】
実施の形態2.
なお、上記実施の形態1(図1〜図10)では、各投光器11、21を各敷居10、20の上端に設け、各受光器12、22を下方方向に延長した形状としたが、逆に、図11および図12のように、各投光器11a、21aを各敷居10、20の下端に設け、各受光器12a、22aを上方方向に延長した形状としてもよい。
【0038】
図11および図12はこの発明の実施の形態2による正常着床状態での断面図であり、図11は図3内のA−A矢印から見た断面図であり、図12は図3内のB−B矢印から見た断面図である。
各図において、前述(図4、図5参照)と同様のものについては、前述と同一符号を付して、または符号の後に「a」を付して詳述を省略する。
【0039】
図11において、投光器11aは、カゴ1の正規着床時に受光器22の下端に対向するように、カゴ側敷居10の水平方向の一方の端面に設けられ、受光器12aは、カゴ側敷居10の水平方向の他方の端面に設けられるとともに、上方方向に延長された形状を有する。
同様に、図12において、投光器21aは、正規着床時に受光器12aの下端に対向するように、乗場側敷居20の水平方向の一方の端面に設けられ、受光器22aは、乗場側敷居20の水平方向の他方の端面に設けられるとともに、上方方向に延長された形状を有する。
【0040】
この場合、制御盤は、受光器22aが光信号L1を受光していない場合には、カゴ1を低速で上昇運転させ、受光器22aが第1の光信号を受光した時点で戸開動作を行う。
また、制御盤は、受光器12aが光信号L2を受光していない場合には、カゴ1を低速で下降運転させ、受光器12aが光信号L2を受光した時点で戸開動作を行う。
【0041】
これにより、カゴ1の着床誤差は自動的に適性調整され、各敷居10、20の床面間の段差は解消される。
したがって、この発明の実施の形態2(図11、図12)のように、各敷居10、20の下端部にカゴ着床誤差検出部を設けた場合も、前述と同等の作用効果を奏する。
【図面の簡単な説明】
【0042】
【図1】この発明の実施の形態1に係るエレベータ制御装置のカゴ側の構成を示す正面図である。
【図2】この発明の実施の形態1に係るエレベータ制御装置の乗場側の構成を示す正面図である。
【図3】この発明の実施の形態1によるカゴ側敷居および乗場側敷居の対向状態を示す平面図である。
【図4】図3内のA−A矢印から見た正常着床状態での断面図である。
【図5】図3内のB−B矢印から見た正常着床状態での断面図である。
【図6】図3内のA−A矢印から見たカゴ上方ずれ状態での断面図である。
【図7】図3内のB−B矢印から見たカゴ上方ずれ状態での断面図である。
【図8】図3内のA−A矢印から見たカゴ下方ずれ状態での断面図である。
【図9】図3内のB−B矢印から見たカゴ下方ずれ状態での断面図である。
【図10】この発明の実施の形態1に係る制御盤の処理動作を示すフローチャートである。
【図11】この発明の実施の形態2による図3内のA−A矢印から見た正常着床状態での断面図である。
【図12】この発明の実施の形態2による図3内のB−B矢印から見た正常着床状態での断面図である。
【符号の説明】
【0043】
1 カゴ、2 乗場、10 カゴ側敷居、11、11a カゴ側投光器、12、12a カゴ側受光器、13 カゴドア、20 乗場側敷居、21、21a 乗場側投光器、22、22a 乗場側受光器、23 乗場ドア、L1 第1の光信号、L2 第2の光信号。
【特許請求の範囲】
【請求項1】
カゴを目的階へ昇降運転させた後に着床運転させてカゴ側敷居の床面と乗場側敷居の床面との段差を調整するとともに、前記カゴの着床時にカゴドアおよび乗場ドアの戸開動作を制御する制御手段と、
前記カゴ側敷居に設けられて第1の光信号を出射するカゴ側投光器と、
前記乗場側敷居に設けられ、前記着床時に前記カゴ側投光器と対向して前記第1の光信号を受光する乗場側受光器と、
前記乗場側敷居に設けられて第2の光信号を出射する乗場側投光器と、
前記カゴ側敷居に設けられ、前記着床時に前記乗場側投光器と対向して前記第2の光信号を受光するカゴ側受光器とを備え、
前記制御手段は、
前記カゴの通常走行による前記乗場への着床時に、
前記乗場側受光器および前記カゴ側受光器が、それぞれ前記第1および第2の光信号を受光している場合には前記戸開動作を行い、
前記乗場側受光器または前記カゴ側受光器の一方が、前記第1または第2の光信号を受光していない場合には、前記カゴを低速で上昇または下降運転させて、前記乗場側受光器および前記カゴ側受光器が前記第1および第2の光信号を受光した時点で前記戸開動作を行うことを特徴とするエレベータ制御装置。
【請求項2】
前記カゴ側投光器は、前記カゴの正規着床時に前記乗場側受光器の上端に対向するように、前記カゴ側敷居の水平方向の一方の端面に設けられ、
前記カゴ側受光器は、前記カゴ側敷居の水平方向の他方の端面に設けられるとともに、下方方向に延長された形状を有し、
前記乗場側投光器は、前記正規着床時に前記カゴ側受光器の上端に対向するように、前記乗場側敷居の水平方向の一方の端面に設けられ、
前記乗場側受光器は、前記乗場側敷居の水平方向の他方の端面に設けられるとともに、下方方向に延長された形状を有し、
前記制御手段は、
前記乗場側受光器が前記第1の光信号を受光していない場合には、前記カゴを低速で下降運転させ、前記乗場側受光器が前記第1の光信号を受光した時点で前記戸開動作を行い、
前記カゴ側受光器が前記第2の光信号を受光していない場合には、前記カゴを低速で上昇運転させ、前記カゴ側受光器が前記第2の光信号を受光した時点で前記戸開動作を行うことを特徴とする請求項1に記載のエレベータ制御装置。
【請求項3】
前記カゴ側投光器は、前記カゴの正規着床時に前記乗場側受光器の下端に対向するように、前記カゴ側敷居の水平方向の一方の端面に設けられ、
前記カゴ側受光器は、前記カゴ側敷居の水平方向の他方の端面に設けられるとともに、上方方向に延長された形状を有し、
前記乗場側投光器は、前記正規着床時に前記カゴ側受光器の下端に対向するように、前記乗場側敷居の水平方向の一方の端面に設けられ、
前記乗場側受光器は、前記乗場側敷居の水平方向の他方の端面に設けられるとともに、上方方向に延長された形状を有し、
前記制御手段は、
前記乗場側受光器が前記第1の光信号を受光していない場合には、前記カゴを低速で上昇運転させ、前記乗場側受光器が前記第1の光信号を受光した時点で前記戸開動作を行い、
前記カゴ側受光器が前記第2の光信号を受光していない場合には、前記カゴを低速で下降運転させ、前記カゴ側受光器が前記第2の光信号を受光した時点で前記戸開動作を行うことを特徴とする請求項1に記載のエレベータ制御装置。
【請求項4】
前記カゴ側投光器および前記乗場側投光器は、前記カゴの通常走行による前記乗場への着床時に、前記制御手段の制御下で前記第1および第2の光信号を出射することを特徴とする請求項1から請求項3までのいずれか1項に記載のエレベータ制御装置。
【請求項1】
カゴを目的階へ昇降運転させた後に着床運転させてカゴ側敷居の床面と乗場側敷居の床面との段差を調整するとともに、前記カゴの着床時にカゴドアおよび乗場ドアの戸開動作を制御する制御手段と、
前記カゴ側敷居に設けられて第1の光信号を出射するカゴ側投光器と、
前記乗場側敷居に設けられ、前記着床時に前記カゴ側投光器と対向して前記第1の光信号を受光する乗場側受光器と、
前記乗場側敷居に設けられて第2の光信号を出射する乗場側投光器と、
前記カゴ側敷居に設けられ、前記着床時に前記乗場側投光器と対向して前記第2の光信号を受光するカゴ側受光器とを備え、
前記制御手段は、
前記カゴの通常走行による前記乗場への着床時に、
前記乗場側受光器および前記カゴ側受光器が、それぞれ前記第1および第2の光信号を受光している場合には前記戸開動作を行い、
前記乗場側受光器または前記カゴ側受光器の一方が、前記第1または第2の光信号を受光していない場合には、前記カゴを低速で上昇または下降運転させて、前記乗場側受光器および前記カゴ側受光器が前記第1および第2の光信号を受光した時点で前記戸開動作を行うことを特徴とするエレベータ制御装置。
【請求項2】
前記カゴ側投光器は、前記カゴの正規着床時に前記乗場側受光器の上端に対向するように、前記カゴ側敷居の水平方向の一方の端面に設けられ、
前記カゴ側受光器は、前記カゴ側敷居の水平方向の他方の端面に設けられるとともに、下方方向に延長された形状を有し、
前記乗場側投光器は、前記正規着床時に前記カゴ側受光器の上端に対向するように、前記乗場側敷居の水平方向の一方の端面に設けられ、
前記乗場側受光器は、前記乗場側敷居の水平方向の他方の端面に設けられるとともに、下方方向に延長された形状を有し、
前記制御手段は、
前記乗場側受光器が前記第1の光信号を受光していない場合には、前記カゴを低速で下降運転させ、前記乗場側受光器が前記第1の光信号を受光した時点で前記戸開動作を行い、
前記カゴ側受光器が前記第2の光信号を受光していない場合には、前記カゴを低速で上昇運転させ、前記カゴ側受光器が前記第2の光信号を受光した時点で前記戸開動作を行うことを特徴とする請求項1に記載のエレベータ制御装置。
【請求項3】
前記カゴ側投光器は、前記カゴの正規着床時に前記乗場側受光器の下端に対向するように、前記カゴ側敷居の水平方向の一方の端面に設けられ、
前記カゴ側受光器は、前記カゴ側敷居の水平方向の他方の端面に設けられるとともに、上方方向に延長された形状を有し、
前記乗場側投光器は、前記正規着床時に前記カゴ側受光器の下端に対向するように、前記乗場側敷居の水平方向の一方の端面に設けられ、
前記乗場側受光器は、前記乗場側敷居の水平方向の他方の端面に設けられるとともに、上方方向に延長された形状を有し、
前記制御手段は、
前記乗場側受光器が前記第1の光信号を受光していない場合には、前記カゴを低速で上昇運転させ、前記乗場側受光器が前記第1の光信号を受光した時点で前記戸開動作を行い、
前記カゴ側受光器が前記第2の光信号を受光していない場合には、前記カゴを低速で下降運転させ、前記カゴ側受光器が前記第2の光信号を受光した時点で前記戸開動作を行うことを特徴とする請求項1に記載のエレベータ制御装置。
【請求項4】
前記カゴ側投光器および前記乗場側投光器は、前記カゴの通常走行による前記乗場への着床時に、前記制御手段の制御下で前記第1および第2の光信号を出射することを特徴とする請求項1から請求項3までのいずれか1項に記載のエレベータ制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2010−18389(P2010−18389A)
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願番号】特願2008−180340(P2008−180340)
【出願日】平成20年7月10日(2008.7.10)
【出願人】(000006013)三菱電機株式会社 (33,312)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願日】平成20年7月10日(2008.7.10)
【出願人】(000006013)三菱電機株式会社 (33,312)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
[ Back to top ]