
エレベータ
【課題】非接触給電装置からの給電が不足した状態に対処して運転を継続することのできるエレベータを提供する。
【解決手段】カウンタウエイトに設けられ、乗りかごが各階で着床したときに非接触給電装置23に対向して非接触給電装置23から供給される電力を受ける受電装置24と、この受電装置24を通じて得られる給電時の電力を監視する電力監視部32と、この電力監視部32によって電力が一定値以下に低下している状態が検出された場合に、省エネ運転モードに切り替えて運転する運転制御部35とを備える。
【解決手段】カウンタウエイトに設けられ、乗りかごが各階で着床したときに非接触給電装置23に対向して非接触給電装置23から供給される電力を受ける受電装置24と、この受電装置24を通じて得られる給電時の電力を監視する電力監視部32と、この電力監視部32によって電力が一定値以下に低下している状態が検出された場合に、省エネ運転モードに切り替えて運転する運転制御部35とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、カウンタウエイトに受電装置を備え、昇降路内に設置された非接触給電装置から電力を非接触で受けるエレベータに関する。
【背景技術】
【0002】
近年、非接触給電方式を適用したエレベータが普及している。特に、カウンタウエイトに受電装置を備え、昇降路内に設置された非接触給電装置から電力を非接触で受けて動作するエレベータがある。
【0003】
この種のエレベータでは、カウンタウエイトにバッテリとモータを備えており、通常時はバッテリに蓄えられた電力でモータを駆動して運転動作する。そして、給電時は昇降路内に設置された給電装置とカウンタウエイトに設置された受電装置とを対向させ、非接触給電装置から非接触で電力を受け、これをバッテリに蓄えるようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−163533号公報
【特許文献2】特開2002−249285号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述したような非接触給電方式のエレベータにあっては、非接触給電装置あるいは受電装置に何らかの異常が生じると、バッテリ残量が足りなくなり、運転を継続できなくなる問題がある。
【0006】
また、非接触給電装置は、カウンタウエイト側の受電装置と精度良く向かい合っていないと給電できない。ところが、経年変化に伴うロープの伸びやシーブの摩耗等により非接触給電装置と受電装置の位置合わせにずれが生じ、給電効率が著しく低下してバッテリ不足になることがある。
【0007】
本発明が解決しようとする課題は、非接触給電装置からの給電が不足した状態に対処して運転を継続することのできるエレベータを提供することである。
【課題を解決するための手段】
【0008】
実施形態に係るエレベータは、昇降路内を乗りかごと共に昇降動作するカウンタウエイトに非接触で電力を供給する非接触給電装置を備えたエレベータにおいて、上記カウンタウエイトに設けられ、上記乗りかごが各階で着床したときに上記非接触給電装置に対向して上記非接触給電装置から供給される電力を受ける受電装置と、この受電装置を通じて得られる給電時の電力を監視する電力監視手段と、この電力監視手段によって電力が一定値以下に低下している状態が検出された場合に、省エネ運転モードに切り替えて運転する運転制御手段とを具備する。
【図面の簡単な説明】
【0009】
【図1】図1は第1の実施形態に係るエレベータの構成を示す図である。
【図2】図2は同実施形態におけるエレベータの制御装置の機能構成を示すブロック図である。
【図3】図3は同実施形態におけるエレベータの運転動作を示すフローチャートである。
【図4】図4は同実施形態における省エネ運転モード時のエレベータの運転動作を示すフローチャートである。
【図5】図5は第2の実施形態におけるエレベータの制御装置の機能構成を示すブロック図である。
【図6】図6は同実施形態におけるエレベータの運転動作を示すフローチャートである。
【図7】図7は第3の実施形態におけるエレベータの乗りかごの着床時の状態を示す図である。
【図8】図8は同実施形態におけるエレベータの制御装置の機能構成を示すブロック図である。
【図9】図9は同実施形態におけるエレベータの運転動作を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、図面を参照して実施形態を説明する。
【0011】
(第1の実施形態)
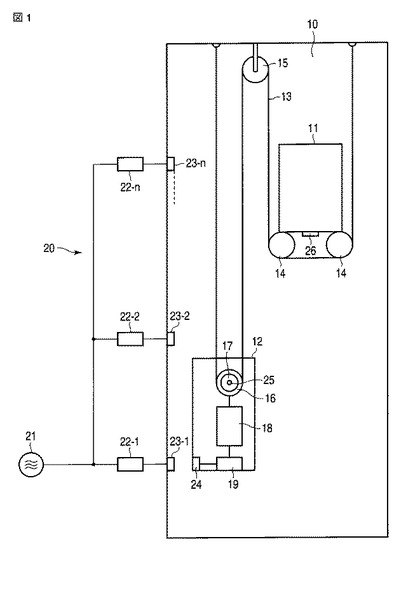
図1は第1の実施形態に係るエレベータの構成を示す図であり、2:1ローピンク形式のエレベータの構成が示されている。
【0012】
昇降路10の中に乗りかご11とカウンタウエイト(吊り合い錘)12が設けられており、それぞれに図示せぬガイドレールに昇降動作可能に支持されている。乗りかご11は、かご下にシーブ14を有しており、そのシーブ14の下側に一端が昇降路頂上部に固定されたロープ13が架設されている。
【0013】
このロープ13は、昇降路頂上部に設けられたシーブ15を介してカウンタウエイト12に設けられたトラクションシーブ16に巻回され、その他端部を昇降路頂上部に固定している。これにより、乗りかご11とカウンタウエイト12を2:1ローピンク形式で支持している。
【0014】
また、カウンタウエイト12には、モータ17、制御装置18、バッテリ19が搭載されている。モータ17は、乗りかご11とカウンタウエイト12を昇降動作させるための駆動装置である。このモータ17の回転軸に取り付けられたトラクションシーブ16が回転することで、トラクションシーブ16に巻回されたロープ13を介して乗りかご11とカウンタウエイト12がつるべ式に昇降動作する。
【0015】
制御装置18は、モータ17の駆動制御を含むエレベータ全体の制御を行う。なお、この制御装置18の機能構成については、後に図2を参照して説明する。バッテリ19は、エレベータの駆動に必要な電力を蓄える。
【0016】
また、本実施形態において、昇降路10にはカウンタウエイト12に非接触で所要の電力を供給するための給電システム20が設けられている。
【0017】
この給電システム20は、三相交流電源21に接続された複数の電源装置22−1,22−2,…22−nと、これらの電源装置22−1,22−2,…22−nに接続された非接触給電装置23−1,23−2,…23−nとからなる。
【0018】
電源装置22−1,22−2,…22−nは、建物の各階に対応して設けられており、それぞれに三相交流電源21から供給される電力をエレベータの駆動に必要な電力に変換する。
【0019】
非接触給電装置23−1,23−2,…23−nは、乗りかご11が各階で停止しているときのカウンタウエイト12の位置に合わせて昇降路10内に配設されている。これらの非接触給電装置23−1,23−2,…23−nは、カウンタウエイト12に設けられた受電装置24と対向したときに非接触で給電を行う。
【0020】
なお、非接触給電の方式としては、例えば電磁誘導方式が用いられる。「電磁誘導方式」は、2つの隣接するコイルの一方(給電側コイル)に電流を流したときに発生する磁束を媒介として他方のコイル(受電側コイル)に送電する方式である。この他に、電流を電磁波に変換し、アンテナを介して送電する「電波方式」や、電磁界の共鳴現象を利用した「電磁界共鳴方式」などがあるが、本発明ではこれらの方式に特に限定されるものではない。
【0021】
また、図1の例では、各階に非接触給電装置23−1,23−2,…23−nが設置されているが、その個数は任意であり、例えば最上階と最下階にだけ設置しておくことでも良い。
【0022】
また、モータ17の回転軸にパルスジェネレータ25が設けられている。パルスジェネレータ25は、モータ17の回転を検出し、1回転に数百回のパルス信号を出力する。制御装置18は、このパルス信号をカウントすることで、現在の乗りかご11の位置を把握する。
【0023】
一方、乗りかご11の底部には、積載荷重を検出するための荷重センサ26が設けられている。この荷重センサ26によって検出された積載荷重を示す信号は、図示せぬ伝送ケーブルを介して制御装置18に与えられる。
【0024】
このような構成において、カウンタウエイト12に搭載されたバッテリ19から電力を得ることで、モータ17を駆動して乗りかご11とカウンタウエイト12を運転動作させる。また、乗りかご11が各階で停止したときに、非接触給電装置23−1,23−2,…23−nの中でカウンタウエイト12に設けられた受電装置24と対向した非接触給電装置を通じて電力を受け、その電力をバッテリ19に蓄える。
【0025】
ここで、非接触給電装置23−1,23−2,…23−nは、カウンタウエイト12側の受電装置24と精度良く向かい合っていないと給電できない。また、非接触給電装置23−1,23−2,…23−nや受電装置24に何らかの異常が発生すると、著しく給電効率が低下してバッテリ不足となり、エレベータを正常に運転できなくなる。
【0026】
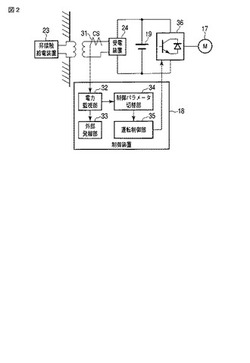
図2は第1の実施形態におけるエレベータの制御装置18の機能構成を示すブロック図である。なお、図2では、各階の乗場に設置された非接触給電装置23−1,23−2,…23−nを代表して任意の階に設置された非接触給電装置に符号23を付して説明する。
【0027】
図1に示したように、カウンタウエイト12には受電装置24が設置されている。受電装置24は、乗りかご11の着床に伴い、非接触給電装置23と対向したときに非接触給電装置23から所要の電力を非接触で受ける。
【0028】
ここで、第1の実施形態において、受電装置24内に非接触給電装置23から得られる電流値(受電量)を検出するための電流センサ31が設けられており、その電流センサ31の検出信号が制御装置18に入力されるようになっている。
【0029】
制御装置18には、電力監視部32、外部発報部33、制御パラメータ切替部34、運転制御部35が備えられている。
【0030】
電力監視部32は、電流センサ31によって検出された電流値に基づいて給電時の電力量を監視し、その電力が一定値以下に低下している状態が検出された場合に異常信号を外部発報部33と制御パラメータ切替部34に出力する。
【0031】
外部発報部33は、電力監視部32から電力低下の異常信号を入力すると、外部に対して、その旨を発報する。ここで言う「外部」とは、建物内の図示せぬエレベータ監視室あるいは遠隔地でエレベータの状態を通信ネットワークを介して遠隔監視している図示せぬ監視センタなどである。
【0032】
制御パラメータ切替部34は、電力監視部32から電力低下の異常信号を入力すると、エレベータの運転パラメータを省エネ運転用に切り替える。運転パラメータとは、エレベータの運転に関わるパラメータのことであり、例えば定格速度、加減速度、ジャーク(加減速度の時間変化率)、ドアの開閉速度やかご内照明の照度、かご内のアナウンス装置や空調装置の動作条件などを含む。
【0033】
運転制御部35は、モータ17の駆動を制御して、乗りかご11とカウンタウエイト12を昇降動作させる。その際、制御パラメータ切替部34から省エネ運転用の運転パラメータが与えられると、運転制御部35は、その運転パラメータを用いてエレベータの運転モードを省エネ運転モードに切り替えて運転する。
【0034】
なお、36はモータ17の駆動装置として用いられるインバータ装置である。このインバータ装置36は、図1では図示を省略しているが、実際にはモータ17と共にカウンタウエイト12に設けられている。
【0035】
次に、第1の実施形態の動作を説明する。
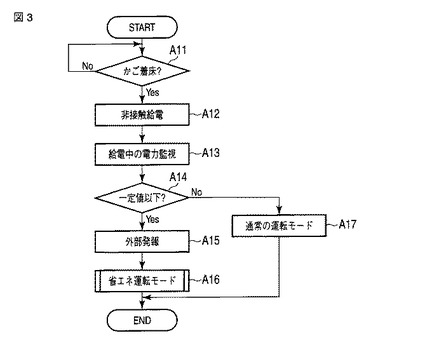
図3は第1の実施形態におけるエレベータの運転動作を示すフローチャートである。
【0036】
乗りかご11が走行中にあるときは、カウンタウエイト12に搭載されたバッテリ19から電力を得て、モータ17が回転駆動している。
【0037】
乗りかご11が任意の階に着床すると(ステップA11のYes)、カウンタウエイト12に設置された受電装置24と非接触給電装置23と対向して、非接触給電装置23から非接触で電力を受け、その電力をバッテリ19に蓄える(ステップA12)。
【0038】
ここで、受電装置24に設けられた電流センサ31によって給電時の電流値が検出される。制御装置18では、電流センサ31によって検出される電流値を監視する(ステップA13)。その電流値が一定値以下(例えば給電正常時の半分以下)であった場合に(ステップA14のYes)、制御装置18は、何らかの原因で給電時の電力が低下した状態にあるものと判断し、その旨を外部(エレベータ管理室あるいは監視センタ)に発報する(ステップA15)。
【0039】
また、制御装置18は、エレベータの運転パラメータを省エネ用に切り替え、省エネ運転モードでエレベータを運転する(ステップA16)。具体的には、例えばエレベータ(乗りかご)の定格速度、加減速度、ジャークを通常時の20%減に落したり、かごドアの戸開閉速度を通常時の20%減に落すなどして、走行中に消費される電力を極力抑えて運転する。なお、この省エネ運転中に乗りかご11内の照明機器の輝度や空調の動作頻度を通常時より下げるようにしても良い。
【0040】
一方、電流センサ31によって検出される電流値が一定値より多く、給電に問題ないと判断された場合には(ステップA14のNo)、制御装置18は、通常の運転モードを継続する(ステップA17)。
【0041】
このように、何らかの原因で給電時の電力が低下した状態が検出された場合に外部に発報して、その間、省エネ運転モードに切り替えることで、保守員が現場に到着するまでの間、消費電力を抑えながら運転を継続することができる。
【0042】
なお、給電時の電力低下により省エネ運転モードに切り替えた場合に、常に省エネ運転を行うのではなく、力行運転時にのみ省エネ運転を行うようにしても良い。
【0043】
すなわち、例えば乗りかご11が昇降路10の下方向に動く場合に、そのときの乗りかご11の荷重がカウンタウエイト12より重ければ、バランス方向に動くため、モータ17が発電機として機能することになり、電力が生じる。同様に、乗りかご11が上方向に動く場合に、そのときの乗りかご11の荷重がカウンタウエイト12より軽ければ、バランス方向に動くため、モータ17が発電機として機能して電力が生じる。
【0044】
このように、バランス方向に動くことにより動力を必要とせずに乗りかご11を運転することを「回生運転」と呼び、そのときに発生する電力を「回生電力」と呼ぶ。また、その逆に、モータ17の動力を必要する運転のことを「力行運転」と呼ぶ。なお、現在の運転状態が回生運転であるのか力行運転であるのかは、乗りかご11の運転方向と積載荷重から判断できる。
【0045】
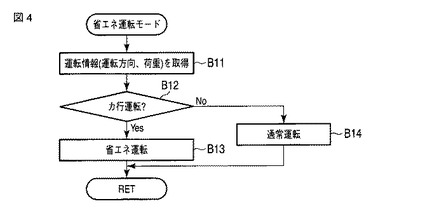
図4は第1の実施形態における省エネ運転モード時のエレベータの運転動作を示すフローチャートである。
【0046】
制御装置18は、エレベータの運転情報として乗りかご11の運転方向と積載荷重を取得する(ステップB11)。運転方向は現在位置と呼びの方向から判断でき、積載荷重は乗りかご11の底部に設置された荷重センサ26によって検出される。
【0047】
制御装置18は、乗りかご11の運転方向と積載荷重に基づいて呼びに対する運転が力行運転であるか回生運転であるかを判断する(ステップB12)。その結果、力行運転であった場合に(ステップB12のYes)、制御装置18は省エネ運転を実行し、定格速度を下げるなどして乗りかご11を呼びのあった階に応答させる(ステップB13)。
【0048】
一方、回生運転であれば(ステップB12のNo)、制御装置18は省エネ運転にせずに、そのまま通常運転により乗りかご11を呼びのあった階に応答させる(ステップB14)。
【0049】
このように、電力を必要とする力行運転時にのみ省エネ運転を行うことで、できるだけ運転効率を下げないようにして運転を継続することが可能となる。
【0050】
(第2の実施形態)
次に、第2の実施形態を説明する。
【0051】
第2の実施形態では、上記第1の実施形態の構成に加え、バッテリ残量が一定値以下に低下した場合に省エネ運転モードに切り替えるようにしたものである。
【0052】
図5は第2の実施形態におけるエレベータの制御装置18の機能構成を示すブロック図である。なお、上記第1の実施形態における図2の構成と同一部分には同一符号を付して、その説明は省略するものとする。
【0053】
図2との違いは、制御装置18にバッテリ残量検出部37が追加されている点である。バッテリ残量検出部37は、バッテリ19の電圧から現在の残量(電力量)を検出する機能を備え、バッテリ19の残量が一定以下に低下した場合に異常信号を外部発報部33と制御パラメータ切替部34に出力する。
【0054】
図6は第2の実施形態におけるエレベータの運転動作を示すフローチャートである。
【0055】
乗りかご11が走行中にあるときは、カウンタウエイト12に搭載されたバッテリ19から電力を得て、モータ17が回転駆動している。
【0056】
乗りかご11が任意の階に着床すると(ステップC11のYes)、カウンタウエイト12に設置された受電装置24と非接触給電装置23と対向して、非接触給電装置23から非接触で電力を受け、その電力をバッテリ19に蓄える(ステップC12)。
【0057】
ここで、受電装置24に設けられた電流センサ31によって給電時の電流値が検出される。制御装置18では、電流センサ31によって検出される電流値を監視する(ステップC13)。その電流値が一定値以下(例えば給電正常時の半分以下)であった場合に(ステップC14のYes)、制御装置18は、何らかの原因で給電時の電力が低下した状態にあるものと判断し、その旨を外部(エレベータ管理室あるいは監視センタ)に発報する(ステップC15)。
【0058】
また、制御装置18は、エレベータの運転パラメータを省エネ用に切り替え、省エネ運転モードでエレベータを運転する(ステップC16)。具体的には、例えばエレベータ(乗りかご)の定格速度、加減速度、ジャークを通常時の20%減に落したり、かごドアの戸開閉速度を通常時の20%減に落すなどして、走行中に消費される電力を極力抑えて運転する。なお、この省エネ運転中に乗りかご11内の照明機器の輝度や空調の動作頻度を通常時より下げるようにしても良い。
【0059】
一方、電流センサ31によって検出される電流値が一定値より多いと判断された場合に(ステップC14のNo)、制御装置18は、バッテリ19の電圧から現在の残量を検出する(ステップC17)。その結果、バッテリ19の残量が一定値以下(例えば、バッテリ容量の半分以下)であった場合には(ステップC18のYes)、制御装置18は、電力不足により運転に支障が生じるものと判断し、その旨を外部に発報すると共に(ステップC15)、エレベータの運転パラメータを省エネ用に切り替え、省エネ運転モードでエレベータを運転する(ステップC16)。
【0060】
このように、給電中の電力に加え、バッテリ残量も監視することで、より確実に現在のエレベータの電力状態を把握でき、電力不足により運転に支障が生じる場合に適切に対応することができる。
【0061】
なお、ここでは給電中の電力とバッテリ残量の両方を監視する構成としたが、バッテリ残量だけ監視して、一定値以下に低下した場合に外部発報と共に省エネ運転モードに切り替えるようにしても良い。
【0062】
さらに、省エネ運転モードでは、図4で説明したように力行運転時にのみ省エネ運転を実行することでも良い。
【0063】
(第3の実施形態)
次に、第3の実施形態について説明する。
【0064】
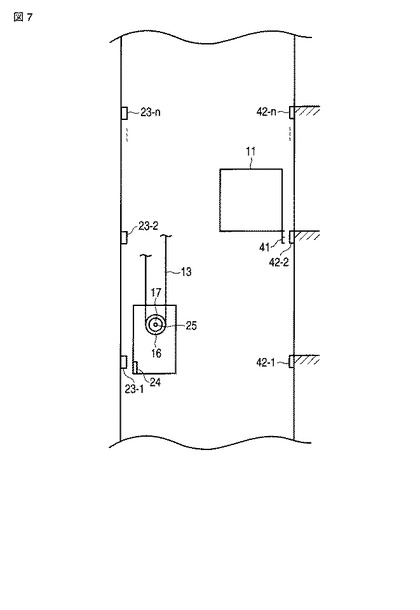
図7は第3の実施形態におけるエレベータの乗りかごの着床時の状態を示す図である。乗りかご11の底部には、乗りかご11の着床レベルを検出するための着床検出センサ41が設けられている。この着床検出センサ41は、昇降路12内の各階の乗り場口の下側に設けられた着検板42−1,42−2…42−nのいずれかに接近することで、乗りかご11が乗り場に着床したことを検出する。
【0065】
このとき、通常は、カウンタウエイト12に設けられた受電装置24は、非接触給電装置23−1,23−2,…23−nのいずれに対向して給電可能な状態にある。ところが、ロープ13の伸びやトラクションシーブ16の摩耗等により非接触給電装置23−1,23−2,…23−nと受電装置24との間に位置ずれが生じている場合がある。このような位置ずれが生じていると、給電効率が低下するため、エレベータ側では電力不足(バッテリ不足)となり、運転に支障が出る。
【0066】
第3の実施形態では、非接触給電装置23−1,23−2,…23−nと受電装置24との位置ずれによる電力低下を防ぐようにしたものである。
【0067】
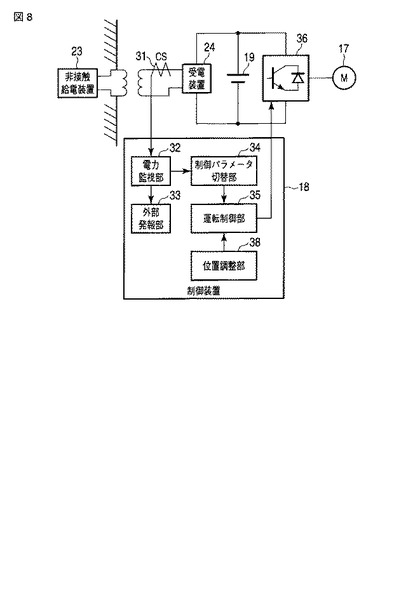
図8は第3の実施形態におけるエレベータの制御装置18の機能構成を示すブロック図である。なお、上記第1の実施形態における図2の構成と同一部分には同一符号を付して、その説明は省略するものとする。
【0068】
図2との違いは、制御装置18に位置調整部38が追加されている点である。位置調整部38は、乗りかご11の着床時に電力監視部32によって電力低下が検出された場合に着床位置の微調整を行う。この調整動作で電力が上がった場合に、運転制御部35はその調整後の位置を記憶しておき、次回の運転から乗りかご11を上記微調整後の位置に着床させるように位置制御を行う。
【0069】
図9は第3の実施形態におけるエレベータの運転動作を示すフローチャートである。
【0070】
乗りかご11が走行中にあるときは、カウンタウエイト12に搭載されたバッテリ19から電力を得て、モータ17が回転駆動している。
【0071】
乗りかご11が任意の階に着床すると(ステップD11のYes)、カウンタウエイト12に設置された受電装置24と非接触給電装置23と対向して、非接触給電装置23から非接触で電力を受け、その電力をバッテリ19に蓄える(ステップD12)。
【0072】
ここで、受電装置24に設けられた電流センサ31によって給電時の電流値が検出される。制御装置18では、電流センサ31によって検出される電流値を監視する(ステップD13)。その電流値が一定値以下(例えば給電正常時の半分以下)であった場合に(ステップD14のYes)、制御装置18は、非接触給電装置23と受電装置24との位置ずれの可能性を考え、着床位置の微調整を行う(ステップD15)。
【0073】
具体的には、モータ17を駆動して、乗りかご11を上方向あるいは下方向に着床レベルに影響でない程度に少しだけ動かす。なお、この微調整の動作は、一定時間以上呼びがない状態で行うことが好ましい。
【0074】
この微調整により電力がアップした場合、つまり、電流センサ31によって検出される電流値が一定値よりも上がった場合に(ステップD16のYes)、制御装置18は、非接触給電装置23と受電装置24との位置ずれが原因であったと判断し、その調整後の位置(パルスジェネレータ25のパルス数)を記憶しておき、次回の運転から乗りかご11を上記微調整後の位置に着床させるように位置制御を行う(ステップD17)。
【0075】
さらに着床位置の調整量が一定以上となった場合は(ステップD20Yes)、着床時のかごと乗り場に生じる段差の大きさが許容範囲外であるとし外部発報をし、非接触給電装置23あるいは受電装置24の取り付け位置に調整が必要なことを連絡する(ステップD21)。
【0076】
一方、微調整により電力がアップしない場合、つまり、電流センサ31によって検出される電流値が一定値以下であれば(ステップD16のNo)、制御装置18は、電力不足により運転に支障が生じるものと判断し、その旨を外部に発報すると共に(ステップD18)、エレベータの運転パラメータを省エネ用に切り替え、省エネ運転モードでエレベータを運転する(ステップD19)。
【0077】
このように、着床位置を微調整する機能を備えることで、非接触給電装置23と受電装置24との位置ずれによる電力低下を防ぐことができる。
【0078】
なお、ここでは給電中の電力を監視する構成としたが、上記第2の実施形態のように給電中の電力とバッテリ残量の両方を監視する構成としても良い。
【0079】
さらに、省エネ運転モードでは、図4で説明したように力行運転時にのみ省エネ運転を実行することでも良い。
【0080】
以上述べた少なくとも1つの実施形態によれば、非接触給電装置からの給電が不足した状態に対処して運転を継続することのできるエレベータを提供することができる。
【0081】
なお、本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0082】
10…昇降路、11…乗りかご、12…カウンタウエイト、13…ロープ、14…シーブ、15…シーブ、16…トラクションシーブ、17…モータ、18…制御装置、19…バッテリ、20…給電システム、21…三相交流電源、22−1,22−2〜22−n…電源装置、23−1,23−2〜23−n…非接触給電装置、24…受電装置、25…パルスジェネレータ、26…荷重センサ、31…電流センサ、32…電力監視部、33…外部発報部、34…制御パラメータ切替部、35…運転制御部、36…インバータ装置、37…バッテリ残量検出部、38…位置調整部。
【技術分野】
【0001】
本発明の実施形態は、カウンタウエイトに受電装置を備え、昇降路内に設置された非接触給電装置から電力を非接触で受けるエレベータに関する。
【背景技術】
【0002】
近年、非接触給電方式を適用したエレベータが普及している。特に、カウンタウエイトに受電装置を備え、昇降路内に設置された非接触給電装置から電力を非接触で受けて動作するエレベータがある。
【0003】
この種のエレベータでは、カウンタウエイトにバッテリとモータを備えており、通常時はバッテリに蓄えられた電力でモータを駆動して運転動作する。そして、給電時は昇降路内に設置された給電装置とカウンタウエイトに設置された受電装置とを対向させ、非接触給電装置から非接触で電力を受け、これをバッテリに蓄えるようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−163533号公報
【特許文献2】特開2002−249285号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述したような非接触給電方式のエレベータにあっては、非接触給電装置あるいは受電装置に何らかの異常が生じると、バッテリ残量が足りなくなり、運転を継続できなくなる問題がある。
【0006】
また、非接触給電装置は、カウンタウエイト側の受電装置と精度良く向かい合っていないと給電できない。ところが、経年変化に伴うロープの伸びやシーブの摩耗等により非接触給電装置と受電装置の位置合わせにずれが生じ、給電効率が著しく低下してバッテリ不足になることがある。
【0007】
本発明が解決しようとする課題は、非接触給電装置からの給電が不足した状態に対処して運転を継続することのできるエレベータを提供することである。
【課題を解決するための手段】
【0008】
実施形態に係るエレベータは、昇降路内を乗りかごと共に昇降動作するカウンタウエイトに非接触で電力を供給する非接触給電装置を備えたエレベータにおいて、上記カウンタウエイトに設けられ、上記乗りかごが各階で着床したときに上記非接触給電装置に対向して上記非接触給電装置から供給される電力を受ける受電装置と、この受電装置を通じて得られる給電時の電力を監視する電力監視手段と、この電力監視手段によって電力が一定値以下に低下している状態が検出された場合に、省エネ運転モードに切り替えて運転する運転制御手段とを具備する。
【図面の簡単な説明】
【0009】
【図1】図1は第1の実施形態に係るエレベータの構成を示す図である。
【図2】図2は同実施形態におけるエレベータの制御装置の機能構成を示すブロック図である。
【図3】図3は同実施形態におけるエレベータの運転動作を示すフローチャートである。
【図4】図4は同実施形態における省エネ運転モード時のエレベータの運転動作を示すフローチャートである。
【図5】図5は第2の実施形態におけるエレベータの制御装置の機能構成を示すブロック図である。
【図6】図6は同実施形態におけるエレベータの運転動作を示すフローチャートである。
【図7】図7は第3の実施形態におけるエレベータの乗りかごの着床時の状態を示す図である。
【図8】図8は同実施形態におけるエレベータの制御装置の機能構成を示すブロック図である。
【図9】図9は同実施形態におけるエレベータの運転動作を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、図面を参照して実施形態を説明する。
【0011】
(第1の実施形態)
図1は第1の実施形態に係るエレベータの構成を示す図であり、2:1ローピンク形式のエレベータの構成が示されている。
【0012】
昇降路10の中に乗りかご11とカウンタウエイト(吊り合い錘)12が設けられており、それぞれに図示せぬガイドレールに昇降動作可能に支持されている。乗りかご11は、かご下にシーブ14を有しており、そのシーブ14の下側に一端が昇降路頂上部に固定されたロープ13が架設されている。
【0013】
このロープ13は、昇降路頂上部に設けられたシーブ15を介してカウンタウエイト12に設けられたトラクションシーブ16に巻回され、その他端部を昇降路頂上部に固定している。これにより、乗りかご11とカウンタウエイト12を2:1ローピンク形式で支持している。
【0014】
また、カウンタウエイト12には、モータ17、制御装置18、バッテリ19が搭載されている。モータ17は、乗りかご11とカウンタウエイト12を昇降動作させるための駆動装置である。このモータ17の回転軸に取り付けられたトラクションシーブ16が回転することで、トラクションシーブ16に巻回されたロープ13を介して乗りかご11とカウンタウエイト12がつるべ式に昇降動作する。
【0015】
制御装置18は、モータ17の駆動制御を含むエレベータ全体の制御を行う。なお、この制御装置18の機能構成については、後に図2を参照して説明する。バッテリ19は、エレベータの駆動に必要な電力を蓄える。
【0016】
また、本実施形態において、昇降路10にはカウンタウエイト12に非接触で所要の電力を供給するための給電システム20が設けられている。
【0017】
この給電システム20は、三相交流電源21に接続された複数の電源装置22−1,22−2,…22−nと、これらの電源装置22−1,22−2,…22−nに接続された非接触給電装置23−1,23−2,…23−nとからなる。
【0018】
電源装置22−1,22−2,…22−nは、建物の各階に対応して設けられており、それぞれに三相交流電源21から供給される電力をエレベータの駆動に必要な電力に変換する。
【0019】
非接触給電装置23−1,23−2,…23−nは、乗りかご11が各階で停止しているときのカウンタウエイト12の位置に合わせて昇降路10内に配設されている。これらの非接触給電装置23−1,23−2,…23−nは、カウンタウエイト12に設けられた受電装置24と対向したときに非接触で給電を行う。
【0020】
なお、非接触給電の方式としては、例えば電磁誘導方式が用いられる。「電磁誘導方式」は、2つの隣接するコイルの一方(給電側コイル)に電流を流したときに発生する磁束を媒介として他方のコイル(受電側コイル)に送電する方式である。この他に、電流を電磁波に変換し、アンテナを介して送電する「電波方式」や、電磁界の共鳴現象を利用した「電磁界共鳴方式」などがあるが、本発明ではこれらの方式に特に限定されるものではない。
【0021】
また、図1の例では、各階に非接触給電装置23−1,23−2,…23−nが設置されているが、その個数は任意であり、例えば最上階と最下階にだけ設置しておくことでも良い。
【0022】
また、モータ17の回転軸にパルスジェネレータ25が設けられている。パルスジェネレータ25は、モータ17の回転を検出し、1回転に数百回のパルス信号を出力する。制御装置18は、このパルス信号をカウントすることで、現在の乗りかご11の位置を把握する。
【0023】
一方、乗りかご11の底部には、積載荷重を検出するための荷重センサ26が設けられている。この荷重センサ26によって検出された積載荷重を示す信号は、図示せぬ伝送ケーブルを介して制御装置18に与えられる。
【0024】
このような構成において、カウンタウエイト12に搭載されたバッテリ19から電力を得ることで、モータ17を駆動して乗りかご11とカウンタウエイト12を運転動作させる。また、乗りかご11が各階で停止したときに、非接触給電装置23−1,23−2,…23−nの中でカウンタウエイト12に設けられた受電装置24と対向した非接触給電装置を通じて電力を受け、その電力をバッテリ19に蓄える。
【0025】
ここで、非接触給電装置23−1,23−2,…23−nは、カウンタウエイト12側の受電装置24と精度良く向かい合っていないと給電できない。また、非接触給電装置23−1,23−2,…23−nや受電装置24に何らかの異常が発生すると、著しく給電効率が低下してバッテリ不足となり、エレベータを正常に運転できなくなる。
【0026】
図2は第1の実施形態におけるエレベータの制御装置18の機能構成を示すブロック図である。なお、図2では、各階の乗場に設置された非接触給電装置23−1,23−2,…23−nを代表して任意の階に設置された非接触給電装置に符号23を付して説明する。
【0027】
図1に示したように、カウンタウエイト12には受電装置24が設置されている。受電装置24は、乗りかご11の着床に伴い、非接触給電装置23と対向したときに非接触給電装置23から所要の電力を非接触で受ける。
【0028】
ここで、第1の実施形態において、受電装置24内に非接触給電装置23から得られる電流値(受電量)を検出するための電流センサ31が設けられており、その電流センサ31の検出信号が制御装置18に入力されるようになっている。
【0029】
制御装置18には、電力監視部32、外部発報部33、制御パラメータ切替部34、運転制御部35が備えられている。
【0030】
電力監視部32は、電流センサ31によって検出された電流値に基づいて給電時の電力量を監視し、その電力が一定値以下に低下している状態が検出された場合に異常信号を外部発報部33と制御パラメータ切替部34に出力する。
【0031】
外部発報部33は、電力監視部32から電力低下の異常信号を入力すると、外部に対して、その旨を発報する。ここで言う「外部」とは、建物内の図示せぬエレベータ監視室あるいは遠隔地でエレベータの状態を通信ネットワークを介して遠隔監視している図示せぬ監視センタなどである。
【0032】
制御パラメータ切替部34は、電力監視部32から電力低下の異常信号を入力すると、エレベータの運転パラメータを省エネ運転用に切り替える。運転パラメータとは、エレベータの運転に関わるパラメータのことであり、例えば定格速度、加減速度、ジャーク(加減速度の時間変化率)、ドアの開閉速度やかご内照明の照度、かご内のアナウンス装置や空調装置の動作条件などを含む。
【0033】
運転制御部35は、モータ17の駆動を制御して、乗りかご11とカウンタウエイト12を昇降動作させる。その際、制御パラメータ切替部34から省エネ運転用の運転パラメータが与えられると、運転制御部35は、その運転パラメータを用いてエレベータの運転モードを省エネ運転モードに切り替えて運転する。
【0034】
なお、36はモータ17の駆動装置として用いられるインバータ装置である。このインバータ装置36は、図1では図示を省略しているが、実際にはモータ17と共にカウンタウエイト12に設けられている。
【0035】
次に、第1の実施形態の動作を説明する。
図3は第1の実施形態におけるエレベータの運転動作を示すフローチャートである。
【0036】
乗りかご11が走行中にあるときは、カウンタウエイト12に搭載されたバッテリ19から電力を得て、モータ17が回転駆動している。
【0037】
乗りかご11が任意の階に着床すると(ステップA11のYes)、カウンタウエイト12に設置された受電装置24と非接触給電装置23と対向して、非接触給電装置23から非接触で電力を受け、その電力をバッテリ19に蓄える(ステップA12)。
【0038】
ここで、受電装置24に設けられた電流センサ31によって給電時の電流値が検出される。制御装置18では、電流センサ31によって検出される電流値を監視する(ステップA13)。その電流値が一定値以下(例えば給電正常時の半分以下)であった場合に(ステップA14のYes)、制御装置18は、何らかの原因で給電時の電力が低下した状態にあるものと判断し、その旨を外部(エレベータ管理室あるいは監視センタ)に発報する(ステップA15)。
【0039】
また、制御装置18は、エレベータの運転パラメータを省エネ用に切り替え、省エネ運転モードでエレベータを運転する(ステップA16)。具体的には、例えばエレベータ(乗りかご)の定格速度、加減速度、ジャークを通常時の20%減に落したり、かごドアの戸開閉速度を通常時の20%減に落すなどして、走行中に消費される電力を極力抑えて運転する。なお、この省エネ運転中に乗りかご11内の照明機器の輝度や空調の動作頻度を通常時より下げるようにしても良い。
【0040】
一方、電流センサ31によって検出される電流値が一定値より多く、給電に問題ないと判断された場合には(ステップA14のNo)、制御装置18は、通常の運転モードを継続する(ステップA17)。
【0041】
このように、何らかの原因で給電時の電力が低下した状態が検出された場合に外部に発報して、その間、省エネ運転モードに切り替えることで、保守員が現場に到着するまでの間、消費電力を抑えながら運転を継続することができる。
【0042】
なお、給電時の電力低下により省エネ運転モードに切り替えた場合に、常に省エネ運転を行うのではなく、力行運転時にのみ省エネ運転を行うようにしても良い。
【0043】
すなわち、例えば乗りかご11が昇降路10の下方向に動く場合に、そのときの乗りかご11の荷重がカウンタウエイト12より重ければ、バランス方向に動くため、モータ17が発電機として機能することになり、電力が生じる。同様に、乗りかご11が上方向に動く場合に、そのときの乗りかご11の荷重がカウンタウエイト12より軽ければ、バランス方向に動くため、モータ17が発電機として機能して電力が生じる。
【0044】
このように、バランス方向に動くことにより動力を必要とせずに乗りかご11を運転することを「回生運転」と呼び、そのときに発生する電力を「回生電力」と呼ぶ。また、その逆に、モータ17の動力を必要する運転のことを「力行運転」と呼ぶ。なお、現在の運転状態が回生運転であるのか力行運転であるのかは、乗りかご11の運転方向と積載荷重から判断できる。
【0045】
図4は第1の実施形態における省エネ運転モード時のエレベータの運転動作を示すフローチャートである。
【0046】
制御装置18は、エレベータの運転情報として乗りかご11の運転方向と積載荷重を取得する(ステップB11)。運転方向は現在位置と呼びの方向から判断でき、積載荷重は乗りかご11の底部に設置された荷重センサ26によって検出される。
【0047】
制御装置18は、乗りかご11の運転方向と積載荷重に基づいて呼びに対する運転が力行運転であるか回生運転であるかを判断する(ステップB12)。その結果、力行運転であった場合に(ステップB12のYes)、制御装置18は省エネ運転を実行し、定格速度を下げるなどして乗りかご11を呼びのあった階に応答させる(ステップB13)。
【0048】
一方、回生運転であれば(ステップB12のNo)、制御装置18は省エネ運転にせずに、そのまま通常運転により乗りかご11を呼びのあった階に応答させる(ステップB14)。
【0049】
このように、電力を必要とする力行運転時にのみ省エネ運転を行うことで、できるだけ運転効率を下げないようにして運転を継続することが可能となる。
【0050】
(第2の実施形態)
次に、第2の実施形態を説明する。
【0051】
第2の実施形態では、上記第1の実施形態の構成に加え、バッテリ残量が一定値以下に低下した場合に省エネ運転モードに切り替えるようにしたものである。
【0052】
図5は第2の実施形態におけるエレベータの制御装置18の機能構成を示すブロック図である。なお、上記第1の実施形態における図2の構成と同一部分には同一符号を付して、その説明は省略するものとする。
【0053】
図2との違いは、制御装置18にバッテリ残量検出部37が追加されている点である。バッテリ残量検出部37は、バッテリ19の電圧から現在の残量(電力量)を検出する機能を備え、バッテリ19の残量が一定以下に低下した場合に異常信号を外部発報部33と制御パラメータ切替部34に出力する。
【0054】
図6は第2の実施形態におけるエレベータの運転動作を示すフローチャートである。
【0055】
乗りかご11が走行中にあるときは、カウンタウエイト12に搭載されたバッテリ19から電力を得て、モータ17が回転駆動している。
【0056】
乗りかご11が任意の階に着床すると(ステップC11のYes)、カウンタウエイト12に設置された受電装置24と非接触給電装置23と対向して、非接触給電装置23から非接触で電力を受け、その電力をバッテリ19に蓄える(ステップC12)。
【0057】
ここで、受電装置24に設けられた電流センサ31によって給電時の電流値が検出される。制御装置18では、電流センサ31によって検出される電流値を監視する(ステップC13)。その電流値が一定値以下(例えば給電正常時の半分以下)であった場合に(ステップC14のYes)、制御装置18は、何らかの原因で給電時の電力が低下した状態にあるものと判断し、その旨を外部(エレベータ管理室あるいは監視センタ)に発報する(ステップC15)。
【0058】
また、制御装置18は、エレベータの運転パラメータを省エネ用に切り替え、省エネ運転モードでエレベータを運転する(ステップC16)。具体的には、例えばエレベータ(乗りかご)の定格速度、加減速度、ジャークを通常時の20%減に落したり、かごドアの戸開閉速度を通常時の20%減に落すなどして、走行中に消費される電力を極力抑えて運転する。なお、この省エネ運転中に乗りかご11内の照明機器の輝度や空調の動作頻度を通常時より下げるようにしても良い。
【0059】
一方、電流センサ31によって検出される電流値が一定値より多いと判断された場合に(ステップC14のNo)、制御装置18は、バッテリ19の電圧から現在の残量を検出する(ステップC17)。その結果、バッテリ19の残量が一定値以下(例えば、バッテリ容量の半分以下)であった場合には(ステップC18のYes)、制御装置18は、電力不足により運転に支障が生じるものと判断し、その旨を外部に発報すると共に(ステップC15)、エレベータの運転パラメータを省エネ用に切り替え、省エネ運転モードでエレベータを運転する(ステップC16)。
【0060】
このように、給電中の電力に加え、バッテリ残量も監視することで、より確実に現在のエレベータの電力状態を把握でき、電力不足により運転に支障が生じる場合に適切に対応することができる。
【0061】
なお、ここでは給電中の電力とバッテリ残量の両方を監視する構成としたが、バッテリ残量だけ監視して、一定値以下に低下した場合に外部発報と共に省エネ運転モードに切り替えるようにしても良い。
【0062】
さらに、省エネ運転モードでは、図4で説明したように力行運転時にのみ省エネ運転を実行することでも良い。
【0063】
(第3の実施形態)
次に、第3の実施形態について説明する。
【0064】
図7は第3の実施形態におけるエレベータの乗りかごの着床時の状態を示す図である。乗りかご11の底部には、乗りかご11の着床レベルを検出するための着床検出センサ41が設けられている。この着床検出センサ41は、昇降路12内の各階の乗り場口の下側に設けられた着検板42−1,42−2…42−nのいずれかに接近することで、乗りかご11が乗り場に着床したことを検出する。
【0065】
このとき、通常は、カウンタウエイト12に設けられた受電装置24は、非接触給電装置23−1,23−2,…23−nのいずれに対向して給電可能な状態にある。ところが、ロープ13の伸びやトラクションシーブ16の摩耗等により非接触給電装置23−1,23−2,…23−nと受電装置24との間に位置ずれが生じている場合がある。このような位置ずれが生じていると、給電効率が低下するため、エレベータ側では電力不足(バッテリ不足)となり、運転に支障が出る。
【0066】
第3の実施形態では、非接触給電装置23−1,23−2,…23−nと受電装置24との位置ずれによる電力低下を防ぐようにしたものである。
【0067】
図8は第3の実施形態におけるエレベータの制御装置18の機能構成を示すブロック図である。なお、上記第1の実施形態における図2の構成と同一部分には同一符号を付して、その説明は省略するものとする。
【0068】
図2との違いは、制御装置18に位置調整部38が追加されている点である。位置調整部38は、乗りかご11の着床時に電力監視部32によって電力低下が検出された場合に着床位置の微調整を行う。この調整動作で電力が上がった場合に、運転制御部35はその調整後の位置を記憶しておき、次回の運転から乗りかご11を上記微調整後の位置に着床させるように位置制御を行う。
【0069】
図9は第3の実施形態におけるエレベータの運転動作を示すフローチャートである。
【0070】
乗りかご11が走行中にあるときは、カウンタウエイト12に搭載されたバッテリ19から電力を得て、モータ17が回転駆動している。
【0071】
乗りかご11が任意の階に着床すると(ステップD11のYes)、カウンタウエイト12に設置された受電装置24と非接触給電装置23と対向して、非接触給電装置23から非接触で電力を受け、その電力をバッテリ19に蓄える(ステップD12)。
【0072】
ここで、受電装置24に設けられた電流センサ31によって給電時の電流値が検出される。制御装置18では、電流センサ31によって検出される電流値を監視する(ステップD13)。その電流値が一定値以下(例えば給電正常時の半分以下)であった場合に(ステップD14のYes)、制御装置18は、非接触給電装置23と受電装置24との位置ずれの可能性を考え、着床位置の微調整を行う(ステップD15)。
【0073】
具体的には、モータ17を駆動して、乗りかご11を上方向あるいは下方向に着床レベルに影響でない程度に少しだけ動かす。なお、この微調整の動作は、一定時間以上呼びがない状態で行うことが好ましい。
【0074】
この微調整により電力がアップした場合、つまり、電流センサ31によって検出される電流値が一定値よりも上がった場合に(ステップD16のYes)、制御装置18は、非接触給電装置23と受電装置24との位置ずれが原因であったと判断し、その調整後の位置(パルスジェネレータ25のパルス数)を記憶しておき、次回の運転から乗りかご11を上記微調整後の位置に着床させるように位置制御を行う(ステップD17)。
【0075】
さらに着床位置の調整量が一定以上となった場合は(ステップD20Yes)、着床時のかごと乗り場に生じる段差の大きさが許容範囲外であるとし外部発報をし、非接触給電装置23あるいは受電装置24の取り付け位置に調整が必要なことを連絡する(ステップD21)。
【0076】
一方、微調整により電力がアップしない場合、つまり、電流センサ31によって検出される電流値が一定値以下であれば(ステップD16のNo)、制御装置18は、電力不足により運転に支障が生じるものと判断し、その旨を外部に発報すると共に(ステップD18)、エレベータの運転パラメータを省エネ用に切り替え、省エネ運転モードでエレベータを運転する(ステップD19)。
【0077】
このように、着床位置を微調整する機能を備えることで、非接触給電装置23と受電装置24との位置ずれによる電力低下を防ぐことができる。
【0078】
なお、ここでは給電中の電力を監視する構成としたが、上記第2の実施形態のように給電中の電力とバッテリ残量の両方を監視する構成としても良い。
【0079】
さらに、省エネ運転モードでは、図4で説明したように力行運転時にのみ省エネ運転を実行することでも良い。
【0080】
以上述べた少なくとも1つの実施形態によれば、非接触給電装置からの給電が不足した状態に対処して運転を継続することのできるエレベータを提供することができる。
【0081】
なお、本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0082】
10…昇降路、11…乗りかご、12…カウンタウエイト、13…ロープ、14…シーブ、15…シーブ、16…トラクションシーブ、17…モータ、18…制御装置、19…バッテリ、20…給電システム、21…三相交流電源、22−1,22−2〜22−n…電源装置、23−1,23−2〜23−n…非接触給電装置、24…受電装置、25…パルスジェネレータ、26…荷重センサ、31…電流センサ、32…電力監視部、33…外部発報部、34…制御パラメータ切替部、35…運転制御部、36…インバータ装置、37…バッテリ残量検出部、38…位置調整部。
【特許請求の範囲】
【請求項1】
昇降路内を乗りかごと共に昇降動作するカウンタウエイトに非接触で電力を供給する非接触給電装置を備えたエレベータにおいて、
上記カウンタウエイトに設けられ、上記乗りかごが各階で着床したときに上記非接触給電装置に対向して上記非接触給電装置から供給される電力を受ける受電装置と、
この受電装置を通じて得られる給電時の電力を監視する電力監視手段と、
この電力監視手段によって電力が一定値以下に低下している状態が検出された場合に、省エネ運転モードに切り替えて運転する運転制御手段と
を具備したことを特徴とするエレベータ。
【請求項2】
上記非接触給電装置から供給される電力を蓄えるバッテリと、
このバッテリの残量を検出するバッテリ残量検出手段とを備え、
上記運転制御手段は、
上記電力監視手段によって電力が一定値以下に低下している状態が検出された場合、あるいは、上記バッテリ残量検出手段によってバッテリ残量が一定値以下に低下している状態が検出された場合に、省エネ運転モードに切り替えて運転することを特徴とする請求項1記載のエレベータ。
【請求項3】
上記運転制御手段は、
上記乗りかごの運転方向と積載荷重に基づいて力行運転であるか否かを判断し、力行運転の場合に上記省エネ運転モードに切り替えて運転することを特徴とする請求項1記載のエレベータ。
【請求項4】
上記受電装置内に設けられ、上記非接触給電装置から得られる電流値を検出する電流センサを備え、
上記電力監視手段は、
上記電流センサによって検出された電流値に基づいて給電時の電力を監視することを特徴とする請求項1記載のエレベータ。
【請求項5】
上記電力監視手段によって電力が一定値以下に低下している状態が検出された場合に、その旨を外部に発報する外部発報手段をさらに具備したことを特徴とする特徴とする請求項1記載のエレベータ。
【請求項6】
上記電力監視手段によって電力が一定値以下に低下している状態が検出された場合に、上記乗りかごの着床位置を微調整する位置調整手段を備え、
上記運転制御手段は、
上記位置調整手段による調整動作で電力が上がった場合に、次回の運転から上記乗りかごを上記調整後の位置に着床させるように位置制御を行うことを特徴とする請求項1記載のエレベータ。
【請求項1】
昇降路内を乗りかごと共に昇降動作するカウンタウエイトに非接触で電力を供給する非接触給電装置を備えたエレベータにおいて、
上記カウンタウエイトに設けられ、上記乗りかごが各階で着床したときに上記非接触給電装置に対向して上記非接触給電装置から供給される電力を受ける受電装置と、
この受電装置を通じて得られる給電時の電力を監視する電力監視手段と、
この電力監視手段によって電力が一定値以下に低下している状態が検出された場合に、省エネ運転モードに切り替えて運転する運転制御手段と
を具備したことを特徴とするエレベータ。
【請求項2】
上記非接触給電装置から供給される電力を蓄えるバッテリと、
このバッテリの残量を検出するバッテリ残量検出手段とを備え、
上記運転制御手段は、
上記電力監視手段によって電力が一定値以下に低下している状態が検出された場合、あるいは、上記バッテリ残量検出手段によってバッテリ残量が一定値以下に低下している状態が検出された場合に、省エネ運転モードに切り替えて運転することを特徴とする請求項1記載のエレベータ。
【請求項3】
上記運転制御手段は、
上記乗りかごの運転方向と積載荷重に基づいて力行運転であるか否かを判断し、力行運転の場合に上記省エネ運転モードに切り替えて運転することを特徴とする請求項1記載のエレベータ。
【請求項4】
上記受電装置内に設けられ、上記非接触給電装置から得られる電流値を検出する電流センサを備え、
上記電力監視手段は、
上記電流センサによって検出された電流値に基づいて給電時の電力を監視することを特徴とする請求項1記載のエレベータ。
【請求項5】
上記電力監視手段によって電力が一定値以下に低下している状態が検出された場合に、その旨を外部に発報する外部発報手段をさらに具備したことを特徴とする特徴とする請求項1記載のエレベータ。
【請求項6】
上記電力監視手段によって電力が一定値以下に低下している状態が検出された場合に、上記乗りかごの着床位置を微調整する位置調整手段を備え、
上記運転制御手段は、
上記位置調整手段による調整動作で電力が上がった場合に、次回の運転から上記乗りかごを上記調整後の位置に着床させるように位置制御を行うことを特徴とする請求項1記載のエレベータ。
【図1】


【図2】

【図3】
【図4】
【図5】

【図6】

【図7】
【図8】
【図9】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−175857(P2012−175857A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−37066(P2011−37066)
【出願日】平成23年2月23日(2011.2.23)
【出願人】(390025265)東芝エレベータ株式会社 (2,543)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月23日(2011.2.23)
【出願人】(390025265)東芝エレベータ株式会社 (2,543)
【Fターム(参考)】
[ Back to top ]