
エンジンの制御装置
【課題】燃費の悪化を最小限に抑えつつスロットル開度と吸入空気量との関係(開度-空気量特性)の変化を適正に学習することができ、エンスト防止、トルク制御精度等の向上を図ることのできるエンジンの制御装置を提供する。
【解決手段】開度-空気量特性の特性変化分を学習する学習手段と、前記学習の要否を判定する学習要否判定手段と、前記学習が必要であると判定されたとき、安定運転状態において、前記学習手段に前記学習を実行させる学習移行手段と、を備え、前記学習要否判定手段は、安定運転状態において、特性記憶手段に記憶されているそのときのスロットル弁の開度に対応する吸入空気量とエアフローセンサにより検出される実吸入空気量との乖離量を求め、該乖離量とそれについて設定された閾値とを用いて前記学習の要否を判定するようにされる。
【解決手段】開度-空気量特性の特性変化分を学習する学習手段と、前記学習の要否を判定する学習要否判定手段と、前記学習が必要であると判定されたとき、安定運転状態において、前記学習手段に前記学習を実行させる学習移行手段と、を備え、前記学習要否判定手段は、安定運転状態において、特性記憶手段に記憶されているそのときのスロットル弁の開度に対応する吸入空気量とエアフローセンサにより検出される実吸入空気量との乖離量を求め、該乖離量とそれについて設定された閾値とを用いて前記学習の要否を判定するようにされる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エンジンの制御装置に係り、特に、エンジン及びその搭載車両の運転状態が所定条件を満たすとき、エンジンを一時的に停止させるアイドルストップを行うようにされたエンジンのスロットル弁の開度と吸入空気量との関係(以下、開度-空気量特性と称す)等のエンジン特性の変化を学習するようにされた制御装置に関する。
【背景技術】
【0002】
自動車の技術分野においては、燃費の向上や温室効果ガス排出量の低減化等を目的として、信号待ち状態等の、エンジン及びその搭載車両の状態が所定条件を満たすとき、エンジンを一時的に停止させるアイドルストップを行い、その後、ドライバのアクセル操作があったときなどに再始動させる技術が知られている。
【0003】
また、走行駆動源としてモータ(モータジェネレータ)とエンジンの両方を備えるハイブリット車両においても、走行中に運転者要求駆動力が所定値以下で、且つバッテリ充電のための発電運転が不要な場合等には、それまで走行駆動源としていたエンジンを停止させ、その後、運転者要求駆動力が所定値以上(例えばモータ発生トルク以上となったとき)、または、バッテリ充電が必要と判断されたときに、エンジン出力軸(クランク軸)に回転力を与え、エンジンを再始動させることも知られている。
【0004】
すなわち、これまでの車両では運転者がアクセル操作をしないシーンでもエンジンはアイドル運転を継続していたが、アイドルストップを行うようにされたハイブリッド車両を含む車両では燃費・排気性能等の向上のため、不要なアイドル運転はしないことになる。
【0005】
一般に、アイドル運転状態では、エンジン回転数が目標エンジン回転数に収束一致するようにフィードバック制御する、いわゆるアイドル回転数制御(ISC)が行われる。このアイドル回転数制御実行中は、運転状態が安定しているため、エンジンの個体差や経時劣化などを吸収するような各種学習が行われる(例えば下記特許文献1参照)。
【0006】
学習の一つとして、電制スロットル弁の開度(以下、スロットル開度と称す)と吸入空気量との関係(特性)の学習がある。
【0007】
詳細には、車載用エンジンに備えられる電制スロットル弁の制御システムでは、通常、予め実験等により求められたスロットル開度と吸入空気量との関係(開度-空気量特性)がコントロールユニット内の記憶装置に例えばテーブルやマップの形で記憶されており、エンジン運転時には、アクセル操作量等に基づいて目標吸入空気量を設定するとともに、実際に吸入される空気量(エアフローセンサにより検出される吸入空気量)が前記目標吸入空気量となるように、前記記憶されている開度-空気量特性を基準にそのとき要求されるスロットル開度を算出し、この算出されたスロットル開度となるように、スロットル弁(の弁体)をモータ等のアクチュエータにより回動させるようになっている。
【0008】
前記開度-空気量特性は、電制スロットル弁を含むエンジンの個体差や経時劣化等により相違・変化するため、例えば、アイドル運転時に、エアフローセンサで検出される吸入空気量、目標吸入空気量等を用いてスロットル開度を増減するフィードバック制御を行なう等して、開度-空気量特性の変化分(ずれ)を学習し、該学習で得られた特性変化分(学習値)を用いて前記記憶されている開度-空気量特性を補正するようにされている。
【0009】
また、ブローバイガス混入等に起因して、吸気通路におけるスロットル弁部分にガム質の異物等(以下、デポと称す)が付着すること等によっても、開度-空気量特性が変化(一般的にはスロットル開度に対し、吸入空気量が減少する方向)することから、定期的に前記特性変化分の学習を行って開度-空気量特性を補正する必要がある。
【0010】
また、エンジン回転数及び負荷が変化する過渡状態においては、エアフローセンサによる検出吸入空気量には、吸気管容積による位相遅れが発生するため、スロットル開度との相関関係確保の観点から、前記学習は、エンジンが安定した運転状態にあるとき、すなわちアイドル運転時に行なうのが一般的である。
【0011】
なお、前記開度-空気量特性としては、スロットル開度と吸入空気量との関係を用いるのが普通であるが、それに代えて、スロットル開度と吸気通路におけるスロットル弁部分の実効通路断面積(以下、スロットル開口面積と称す)との関係を用いる場合もある。
【0012】
ところが、前述のようにアイドルストップを行うようにされた車両においては、基本的にアイドル運転状態が存在しないため、前記学習の機会を確保することができない。
【0013】
そこで、所定距離走行したときやKEYONが所定回数行われたときにアイドルストップを禁止させて前記学習を行うことが知られている。しかし、この場合、学習が不要な場合でもアイドルストップを禁止するため、燃費悪化を招いたり、デポ付着が増えやすい地域走行時には、学習頻度が足りず、エンストやトルクずれが発生するおそれがある。
【0014】
こういった状況を回避するため、特許文献1では、非アイドル運転状態で学習を行うことが提案されている。
【先行技術文献】
【特許文献】
【0015】
【特許文献1】特開2010−65529号公報
【発明の概要】
【発明が解決しようとする課題】
【0016】
一般に、ハイブリッド車では燃費最適線を維持するようにエンジンが制御されるため、非アイドル運転状態でも安定運転状態が存在することになる。
【0017】
しかしながら、上記特許文献1では、前記安定運転状態についての言及がない。そのため、非アイドル運転時における過渡状態でも学習してしまうことにより、学習精度が低くなる可能性がある。
【0018】
本発明は、上記事情に鑑みてなされたもので、その目的とするところは、エンジン及びその搭載車両の状態が所定条件を満たすとき、エンジンを一時的に停止させるアイドルストップを行うようにされるとともに、スロットル開度と吸入空気量との関係(開度-空気量特性)等のエンジン特性の変化を学習するようにされたもとで、燃費の悪化を最小限に抑えつつ学習精度を高めることができて、エンスト防止、トルク制御精度等の向上を図ることのできるエンジンの制御装置を提供することにある。
【課題を解決するための手段】
【0019】
上記目的を達成すべく、本発明に係るエンジンの制御装置は、スロットル開度-空気量特性等のエンジン特性の特性変化分を学習して以前の特性を補正する学習手段と、非アイドル運転時において安定運転状態であるか否かを判定する安定運転状態判定手段と、該手段により前記安定運転状態であると判定されたとき、前記学習の要否を判定する学習要否判定手段と、該判定手段により前記学習が必要であると判定されたとき、アイドル運転状態等の安定運転状態に移行して前記学習手段に前記学習を実行させる学習移行手段と、を具備して構成される。
【発明の効果】
【0020】
一般に、アイドル運転で学習する制御の場合、学習要否の判定を行わず、成り行きのアイドル運転状態となったタイミングで常に学習するため、アイドル運転がほとんど存在しない車両では、学習ができない上に、学習が必要か否かの判定もできない状況となっている。
【0021】
そこで、上記のように学習要否判定手段を設け、非アイドル運転時における安定運転状態において学習の要否判定を行うことにより、アイドル運転状態がほとんど存在しないハイブリッド車でも学習の要否を判断することが可能となる。
【0022】
これにより、例えば、ハイブリッド車両では、学習が必要と判断された場合には、アイドルストップを禁止してアイドル運転へ移行させて学習を行うことができる。すなわち、学習が必要なシーンに限定して、アイドル運転へと移行させることが可能となるため、燃費の悪化を最小限に抑えることができるとともに、燃費の悪化を最小限に抑えつつ学習精度を高めることができて、エンスト防止、トルク制御精度等の向上を図ることができる。
上記した以外の、課題、構成、及び効果は、以下の実施形態により明らかにされる。
【図面の簡単な説明】
【0023】
【図1】本発明に係るエンジンの制御装置の一実施例を、それが適用されたハイブリッド車両用エンジンと共に示す概略構成図。
【図2】本発明に係るエンジンの制御装置の主要部を構成するECU周りの構成を示す図。
【図3】目標スロットル開度の演算例の説明に供されるブロック図。
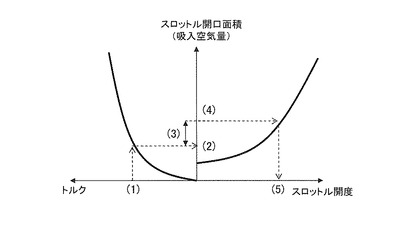
【図4】目標トルク-スロットル開口面積(吸入空気量)-スロットル開度の関係の一例を示す相関図。
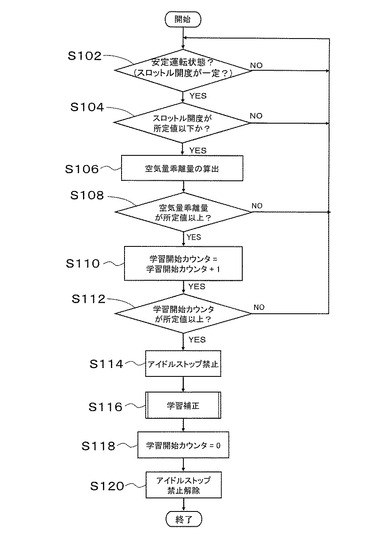
【図5】本発明第1実施例の開度-空気量特性の変化分の学習要否判定等を行う際の処理手順の一例を示すフローチャート。
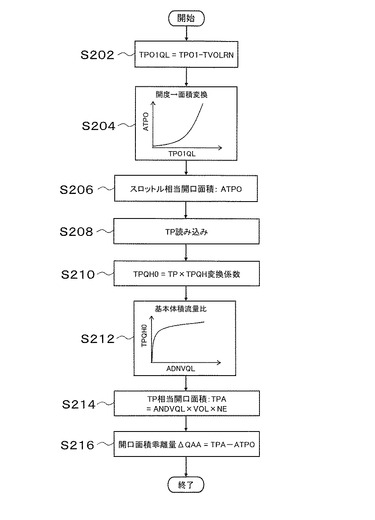
【図6】図5のS106の乖離量算出の詳細な処理手順例を示すフローチャート。
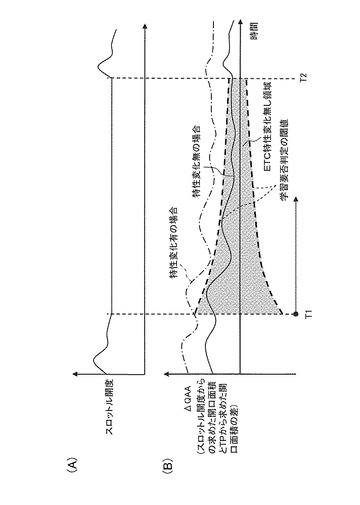
【図7】開度-空気量特性の変化分の学習要否判定の説明に供される図。
【図8】開度-空気量特性の変化分の学習要否判定並びに学習補正の前後における各部の挙動・変化を示すタイムチャート。
【図9】本発明第2実施例の開度-空気量特性の変化分の学習要否判定等を行う際の処理手順の一例を示すフローチャート。
【図10】スロットル開度毎に学習要否判定が行われた頻度を示したグラフである。
【発明を実施するための最良の形態】
【0024】
以下、本発明の実施の形態を図面を参照しながら説明する。
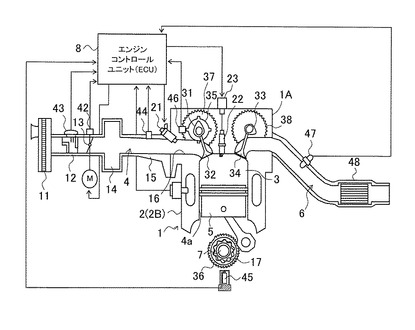
図1は、本発明に係るエンジンの制御装置の一実施例を、それが適用されたハイブリッド車両用エンジンと共に示す概略構成図である。
【0025】
図示のエンジン1は、DOHC型の多気筒4サイクルエンジンであり、シリンダヘッド2Aとシリンダブロック2Bとからなるシリンダ2を備え、シリンダヘッド2Aには、吸気弁32用のカム軸31と、排気弁34用のカム軸33が配設され、シリンダブロック2Bにはピストン5が摺動自在に嵌挿され、ピストン5上方には、所定形状の燃焼室(天井ないしルーフ部)を持つ燃焼作動室3が画成され、この燃焼作動室3には、点火コイル等からなる点火ユニット23に接続された点火プラグ22が臨設されている。
【0026】
燃料の燃焼に供せられる空気は、エアークリーナ11から、ホットワイヤ式等のエアフローセンサ43や電制スロットル弁13が配在されたスロットルボディ(管状通路部分)12、コレクタ14、吸気マニホールド(多岐管)15、吸気ポート16等からなる吸気通路4を通り、その下流端(吸気ポート16端部)に配在された吸気弁32を介して各気筒の燃焼作動室3に吸入される。また、吸気通路4の下流部分(吸気マニホールド15)には、各気筒毎に、吸気ポート16に向けて燃料を噴射する燃料噴射弁21が臨設されるとともに、吸気圧センサ44が配設されている。なお、前記スロットルボディ12には、電制スロットル弁13の開度を検出するスロットル(開度)センサ42に取り付けられている。
【0027】
一方、クランク軸7の一端にはクランクプーリ36が取付固定され、吸気弁32を開閉するための吸気カム軸31の一端には吸気カムプーリ37が外嵌固定され、排気弁34を開閉するための排気カム軸33の一端には排気カムプーリ38が外嵌固定されている。各プーリ36,37,38の外周部には歯が設けられており、各プーリ36、37、38にはタイミングベルト(図示省略)が掛け回され、このタイミングベルトによりクランク軸7の回転が吸気カム軸31及び排気カム軸33に伝達されるようになっている。なお、吸気カムプーリ37及び排気カムプーリ38に対するクランクカムプーリ36の回転数比は1:2となっている。
【0028】
燃焼作動室3に吸入された空気と燃料噴射弁21から噴射された燃料との混合気は、点火プラグ22による火花点火により燃焼せしめられ、その燃焼廃ガス(排気ガス)は、燃焼作動室3から排気弁34を介して排気ポート、排気マニホールド、排気浄化用触媒(例えば三元触媒)48が設けられた排気管等からなる排気通路6を通って外部(大気中)に排出される。排気通路6における触媒48より上流側には酸素濃度センサ(空燃比センサ)47が配在されている。
【0029】
また、各気筒毎に配備された燃料噴射弁21には、燃料タンク内の燃料(ガソリン等)が、クランク軸7により回転駆動される燃料ポンプや燃圧レギュレータ等を備えた燃料供給機構により所定燃圧に調圧されて供給され、燃料噴射弁21は、本実施例のエンジンの制御装置の主要部を構成するエンジンコントロールユニット(以下、ECUと称す)8から供給される、そのときの運転状態に応じたパルス幅(開弁時間に相当する)を持つ駆動パルス信号により開弁駆動され、その開弁時間に応じた量の燃料を吸気ポート16に向けて噴射するようになっている。
【0030】
また、エンジン1には、エンジン冷却水温を検出する水温センサ41、クランク軸7(に固着された歯付き円板)の回転角度を検出して、クランク軸7の回転位置を表す角度信号を出力するクランク角センサ45、吸気弁32を駆動するカム軸31(に固着された歯付き円板35)の回転角度を検出して、カム軸31の回転位置を表す角度信号を出力するカム角センサ46等が配備されており、それらから得られる信号もECU8に供給される。
【0031】
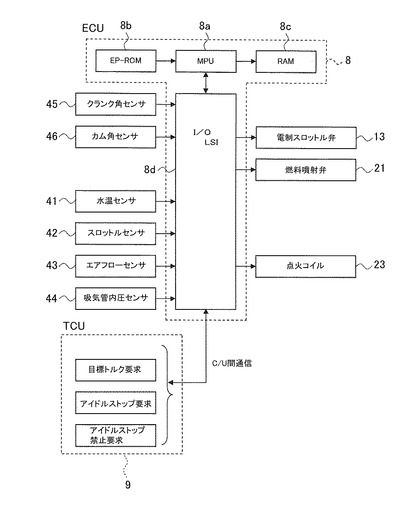
本実施例のECU8は、そのハードウェア自体はよく知られたもので、図2に示される如くに、その主要部が、MPU8a、EP-ROM8b、RAM8c、及びA/D変換器を含むI/O用LSI8d等で構成される。
【0032】
I/O用LSI8dの入力側には、クランク角センサ45、カム角センサ46、水温センサ41、スロットルセンサ42、エアフローセンサ43、吸気管内圧センサ44、空燃比センサ47を含む各種のセンサ類からの信号が供給される。
【0033】
また、本実施例のエンジンの制御装置8が適用されるハイブリッド車では、ECU8とは別に、マイクロコンピュータを内蔵した統合コントロールユニット(以下、TCUと称す)9を有しており、TCU9からECU8へ、実現すべき目標トルク要求やエンジンを一時的に停止させるアイドルストップ要求、アイドルストップを禁止させるアイドルストップ禁止要求などをCAN通信等のユニット間通信によりデータ送受信が行われる。
【0034】
ECU8は、これらの入力信号やユニット間通信信号に基づいて所定の演算処理を実行し、この演算結果として算定された各種の制御信号をI/O用LSI8dから出力し、アクチュエータである電制スロットル弁13、燃料噴射弁21、点火コイル23等に向けて所定の制御信号を供給して、スロットル開度制御、燃料噴射制御、点火時期制御等を実行する。
【0035】
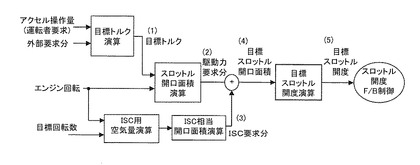
次に、スロットル弁13の開度-吸入空気量特性(開度-空気量特性)の変化分の学習に関与する制御について、図3のブロック図及び図4のグラフを参照しながら説明する。
【0036】
まず、運転者によるアクセル操作による要求トルク及び外部要求トルクを含むTCU9からの要求トルクに基づいて目標トルク(1)を演算する。演算された目標トルク(1)からエンジン特性に応じて一義的に求まる駆動力要求分としてのスロットル開口面積(吸入空気量に相当する)(2)を演算する。
【0037】
これとは別に、ISC制御空気量としてアクセルOFF時いわゆるアイドル運転状態でのエンジン回転数保持分を目標回転数と実エンジン回転数から演算し、トルク要求分と同様にISC相当開口面積(3)を算出する。演算された駆動力要求分開口面積(2)とISC相当開口面積(3)を加算して、現在の運転状態に必要なスロットル開口面積(4)とする。このスロットル開口面積(4)は、現在の運転状態に必要な吸入空気量に相当する。
【0038】
次に、吸入空気量とスロットル開口面積とスロットル開度とは相関関係にあることから、例えば予め記憶装置(EP−ROM8b)に記憶されているスロットル開度-スロットル開口面積特性(前述したスロットル開度-吸入空気量特性と同じく、開度-空気量特性と称する)を表すマップから目標スロットル開口面積(4)に相当するスロットル開度を読み出すことにより、最終的な目標スロットル開度(5)を求め、求められた開度(5)となるようにスロットル弁(の弁体)13を回動させる制御を行なう。
【0039】
ところが、デポ付着等の経年変化により、スロットル開度を前記(5)にしても、実際のスロットル開口面積(吸入空気量)が前記(4)とはならず、吸入空気量に過不足が生じ、所要のトルクが得られない場合がある。
【0040】
詳しくは、前述した予め記憶装置に記憶されている開度-空気量特性はあくまで初期特性であるため、デポ付着等の経年変化により、実際の開度-空気量特性は、初期開度-空気量特性からは変化しており、この変化が大きいと、初期開度-空気量特性を用いて求めたスロットル開度では結果的に吸入空気量が不足したり過剰になったりすることになる。言い換えれば、例えば、前記デポ付着が発生すると、スロットル開口面積が狭くなり、アクセル操作量等に応じて設定される目標吸入空気量を得るためにはスロットル開度をより大きくする必要がある。
【0041】
なお、図3においてハイブリッド車両では、エンジンが実現すべき目標トルクは統合コントロール装置によって算出されるために、目標トルク(1)算出にあたっては、アクセル開度の代わりに統合コントロール装置からの目標トルク要求が使われる。
【0042】
上述のようにデポ付着等の経年変化による開度-空気量特性変化を学習によって補正する必要があるが、吸気管容積による位相遅れが存在するため、前記開度-空気量特性(の変化)の学習は、通常、運転状態が安定するアイドル運転状態で行っている。しかし、前述のとおり、アイドルストップ機能を有する車両においては、基本的にアイドル運転点が存在しないため、前記学習を行うことができない。
【0043】
そこで、本第1実施例では、非アイドル運転時において安定運転状態であるか否かを判定するとともに、安定運転状態である場合には学習要否を判定し、学習が必要な場合には、アイドルストップを禁止をすることにより、学習用のアイドル運転状態を作り出し、ECU8の特性記憶手段(EP-ROM8b)に記憶されている前記スロットル弁13の開度と吸入空気量との関係をあらわす開度-空気量特性の特性変化分を学習して、前記特性記憶手段に記憶されている以前の特性を補正するようにされ、ECU8は、前記特性記憶手段に記憶されている最新の開度-空気量特性を用いて前記スロットル弁13を制御するようにされる。
【0044】
以下、図5のフローチャートを参照しながら、詳細に説明する。
まず、ステップS102(以下、ステップは省略)で安定運転状態か否かを判断する。ここでは安定運転状態であるか否かをスロットル開度が一定であるか否か(開度変化の有無)で判定している。スロットル開度が一定であれば、多少の空気の位相遅れが存在するとしても基本的に定常状態になる。他にエンジン回転数の変化が所定値以内、吸入空気量の変化が所定値以内、吸気圧の変化が所定値以内などの条件を追加してもよい。また、暖機運転や発電運転なども前述の条件が満たされるため、安定運転状態に含めることが可能である。
【0045】
S102で安定運転状態ではないと判断された場合には元に戻り、安定運転状態になるまで待つ。安定運転状態が開始された場合には、S104に進んでスロットル開度が所定値以下か否かを判断する。一般にデポ付着による開度-空気量特性変化の影響は低スロットル開度で顕在化し、高スロットル開度ではほとんど影響が出ない。そのためスロットル開度が小さい場合のみ以下の処理を実行する。このS104の判断に使用する閾値は、ハイブリッド車両で取りうる頻度の開度と開度-空気量特性変化の影響が顕在化する開度とから予め求めておく。
【0046】
スロットル開度が前記閾値(所定値)以下の場合にはS106に進んで開度-空気量特性の変化分を求める。ここでは、開度-空気量特性変化分として、スロットルセンサ42により検出されるスロットル開度から求めた開口面積とエアフローセンサ43により検出される空気量から求めた開口面積とのずれを空気量乖離量として算出する。なお、詳細は図6を参照して後述する。
【0047】
S108では、S106で算出された空気量乖離量が所定値(閾値)以上か否かを判断する。所定値以上の場合には、空気量がずれている、即ち開度-空気量特性が変化しているとしてS110へ進み、学習開始カウンタを一つインクリメントする。所定値以内の場合には、開度-空気量特性変化が無いとして元に戻る。元に戻るときに、学習開始カウンタをクリアする構成にして、連続して空気量乖離量が所定値以上の状態が続いた時のみカウントアップしていくようにしてもよい。なお、開度-空気量特性変化の有無を判定する閾値に関しては図7を用いて後述する。
【0048】
S112では、学習開始カウンタが所定値以上か否かを判断する。これは、非アイドル運転状態で乖離量の大小を判定しているため、誤判定を防止するために、複数回開度-空気量特性の変化を検出するようにしている。
【0049】
学習開始カウンタが所定値以上の場合には、S114へ進み、TCU9に対してアイドルストップ禁止要求を送信する。TCU9では、モータとエンジンの状態を考慮して、エンジントルク要求が無い場合に、アイドル運転状態へと移行する。このアイドル運転状態では、S116にて、いわゆるアイドル回転数制御(ISC)を行って、開度-空気量特性の変化分(学習値)を求め、特性変化分(学習値)を用いて前記記憶されている開度-空気量特性を補正する学習補正を行う(この学習補正自体は当該技術分野ではよく知られているので詳細な説明は省略する)。
【0050】
上記学習補正終了後には、S118に進んで、学習開始カウンタをクリアするとともに、S120にてアイドルストップ禁止要求を解除するようにTCU9へ送信するとともに、エンジンを停止(IGスイッチOFF)させる。
【0051】
次に、図5のS104で行われる空気量乖離量の算出を、図6のフローチャートを使用して説明する。
本空気量乖離量算出は、空気量を開口面積情報の次元に換算して行う方法であるが、スロットル開度情報の次元および空気量情報の次元に換算してもよい。
【0052】
S202では、スロットルセンサ42によって検出されたスロットル開度TPO1から前回の特性変化分の学習値TVOFQL(初期値は0)を減算して補正スロットル開度TPO1QLを算出する。すなわち、学習をしていない状態のスロットル開度を基準とする。
【0053】
S204では、前記補正スロットル開度TPO1QLを開度-面積変換のテーブルを使用して、スロットル開度相当開口面積ATPO1に変換する。
【0054】
一方、S208ではエアフローセンサ43により検出される質量流量TPを読み込む。そしてS210では、質量流量TPに基準状態(標準状態)での質量流量→体積流量変換係数TPQHを乗じることにより、基準状態での体積流量比TPQH0を算出する。
【0055】
S212では、体積流量比TPQH0から体積流量比-開口面積/吸引容積相当変換テーブルから開口面積/吸引容積相当ADNVQLを算出する。なお、体積流量比-面積/吸引容積相当変換テーブルは、スロットル開口面積が小さいところでは、ソニック流となって開口面積が増大に対して体積流量が比例的に増大するが、開口面積が増大するにつれて飽和状態に近づく特性となる。
【0056】
S214では開口面積/吸引容積相当ADNVQLにエンジン排気量VOLとエンジン回転速度NEを乗じることによりTP相当開口面積TPAを算出する。
【0057】
S216では、S206で求めたスロットル相当開口面積ATPOとS214で求めたTP相当開口面積TPAの差分を取り開口面積乖離量ΔQAAを算出する。
【0058】
開度-空気量特性変化が無い場合にはΔQAAが略零となるが、開度-空気量特性変化が大きければ大きいほどΔQAAの値が大きくなる。即ちΔQAAの値が大きい場合には、開度-空気量特性が大きく変化したとみなすことが可能となる。
【0059】
次に、開度-空気量特性が大きく変化したか否かの判定(学習要否判定)に関して図7を用いて説明する。
【0060】
開口面積乖離量ΔQAAが所定値以上の場合には、開度-空気量特性が大きく変化したと判定できるが、本実施例では安定運転状態として、スロットル開度が一定になってから本開口面積乖離量演算を開始する構成としているため、スロットル開度一定となって安定運転状態となった直後は吸気系の位相遅れにより空気量が一定となるまでに時間がかかることになる。その間、前運転状態の吸気系の影響を受けるため、開口面積乖離量が振れて、閾値を超えてしまい、本来開度-空気量特性にさほど変化が無い場合でも、誤判定してしまうおそれがある。一方、空気量が一定となる状態となってから演算を開始した場合には、特性変化判定に時間がかかることになる。
【0061】
ハイブリッド車は、最適燃費線を維持するとはいえ、非アイドル運転状態であるため、安定運転状態が短い可能性もあり、早期に開度-空気量特性き変化を検知する必要がある。そこで、安定運転状態移行直後の判定用閾値は大きくし、時間経過とともに閾値を小さくするような構成とすることで、特性変化有無(学習要否)の早期判定と誤判定回避を両立させる。なお、更なる誤判定を防止するために、図5のS108〜S112のように開度-空気量特性変化が複数回検知された場合のみ開度-空気量特性変化したと判定するようにしている。
【0062】
また、スロットル開度によって特性変化の影響代は異なるため、スロットル開度に応じて閾値を可変とするような構成を上記に加えてもよい。
【0063】
図7において、実線が開度-空気量特性変化が無い場合のΔQAA、一点鎖線がETC特性変化が有る場合のΔQAAを示す。破線が開度-空気量特性変化の有無を判定する閾値を示しており、破線内にΔQAAが存在していれば、開度-空気量特性変化が無いことを表している。前述したように、この閾値は、時間経過とともに小さくなるように設定されている。
【0064】
時点T1にてスロットル開度が一定となって、安定運転状態に移行し、開口面積乖離量演算が開始される。開始直後は、吸気系の位相遅れにより大きく振れており、次第に所定値へ収束していく。実線のように開度-空気量特性変化が無い場合でも安定運転状態に移行直後はΔQAAが大きく振れているが、このときは閾値が大きく設定されているため誤判定には至らない。開度-空気量特性変化(学習要否判定)の最終判定は、安定運転状態から外れた時点T2で行うことになる。
【0065】
当然のことながら、安定運転状態が長く続いたほうが、即ち時点T1からT2までの時間が長いほど誤検出の可能性が低くなることから、安定運転状態の継続時間に応じて開度-空気量特性変化検出の重み付けを行っても良い。例えば、安定運転状態継続時間が長いほど図5のS110における学習開始カウンタの増加量を1固定ではなく、大きくするような構成としてもよい。
【0066】
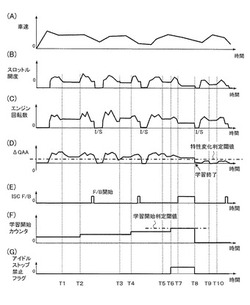
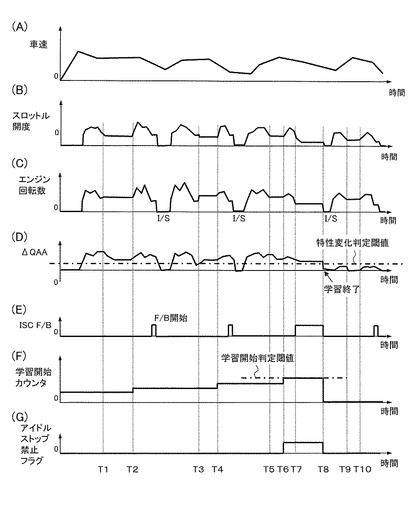
次に図8のタイムチャートを用いて、本実施例の各部の挙動・変化を説明する。
図8では、簡単のため開度-空気量特性変化有無判定用の閾値は一点定数としている(△QAAのタイムチャートに記載)。
【0067】
非アイドル運転状態で運転しているが、時点T1にて安定運転状態となるため、このタイミングから開度-空気量特性変化の検出を開始し、時点T2で非安定運転状態となったタイミングで最終の開度-空気量特性変化判定を実行する。開口面積乖離量ΔQAAは開度-空気量特性変化の有無(学習要否)判定用閾値よりも大きい、即ち開度-空気量特性に変化があると判定されるため、学習開始カウンタを一つインクリメントする。同様に非アイドル運転状態における安定運転状態(時点T3〜T4、時点T5〜T6)で開度-空気量特性変化判定を実行していき、時点T6において学習開始カウンタが学習開始判定閾値(回数)を上回ることにより、アイドルストップ禁止要求を出す。アイドルストップ(I/S)禁止要求を受けてTCUはアイドル運転に移行できるタイミング(T7)でアイドル運転状態となる。このタイミングで開度-空気量特性変化分の学習は実行され、学習補正終了(T8)とともにアイドルストップ禁止要求をクリアすることによりアイドルストップへ移行する。その後、時点T9〜T10において、安定運転状態となるが、すでに空気量学習が終了している、即ち開度-空気量特性が正しく補正されているため、ΔQAAの値は小さくなっている。
【0068】
上記のように本第1実施例では、非アイドル運転時でも安定運転状態が存在するハイブリッド車両の特徴を生かし、非アイドル運転時における安定運転状態において開度-空気量特性が大きく変化したか否かの判定(学習要否判定)を行い、学習が必要な場合には、アイドル運転状態に移行させて特性変化分の学習を行うようにされる。そのため、学習が必要な場合のみ学習が行われるので、燃費と学習精度向上の両立を図ることができる。
【0069】
より詳細には、一般に、アイドル運転状態で学習する場合、学習要否の判定を行わず、成り行きのアイドル運転状態となったタイミングで常に学習するため、アイドル運転がほとんど存在しない車両では、学習ができない上に、学習が必要か否かの判定もできない状況となっている。
【0070】
そこで、上記のように、非アイドル運転時の安定運転状態で学習の要否判定を行うことにより、アイドル運転状態がほとんど存在しない車両でも学習の要否を的確に判断することが可能となる。
【0071】
これにより、例えば、ハイブリッド車両では、学習が必要と判断された場合には、アイドルストップを禁止してアイドル運転へ移行させて学習を行うことができる。すなわち、学習が必要なシーンに限定して、アイドル運転へと移行させることが可能となるため、燃費の悪化を最小限に抑えることができる。
【0072】
また、学習要否を判定するために、開度-空気量特性として例えばマップの形で記憶されている、そのときのスロットル開度に対応する吸入空気量とエアフローセンサにより検出される実吸入空気量との乖離量を算出し、その乖離量が所定値(閾値)を越えたいる場合に学習に移行させることにより、必要なシーンに限定して学習を行うため、燃費悪化を最小限にすることが可能となる。また、エンジンの安定運転状態、即ち空気量が安定している状態で学習要否判定を行うため、要否判定の精度は高く、確実に必要な時に、学習を行うことが可能となる。
【0073】
さらに、学習要否判定は、吸入空気量の変動が無い状態がもっとも精度よく判定を行うことができる。そこで、空気量変動が少なくなる状態を安定運転状態とし、その状態で学習要否判定を行う構成とすることで、誤判定するのを防止することができる。
【0074】
吸気系の位相遅れやエアフローセンサの応答遅れなどにより、安定運転状態移行直後は、空気量が大きく振れる可能性があるため、特性変化判定の判定閾値を一点定数とした場合、誤判定してしまう可能性ある。一方、吸入空気量が十分安定してから判定を開始した場合には、判定終了までに時間がかかり、場合によっては判定終了するまえにエンジン安定運転状態から外れてしまい、そもそも判定ができなくなってしまう恐れもある。限られたエンジン安定運転状態で早期に判定するためにも、判定は安定運転状態移行直後から開始するのが望ましい。そこで、上記実施例のように、時間の経過に伴って閾値を変化、例えば、時間の経過とともに閾値を厳しくするような構成とすれば、安定運転状態移行直後での誤判定を防止することが可能となる。
【0075】
一般に、デポ付着、詰まり等に起因する開度-空気量特性の変化は、スロットル開度が低い(小さい)ほど影響を受けやすく、スロットル開度が高い(大きい)ほど影響を受けにくい。そのため、上記実施例のようにスロットル開度に応じて閾値を変化させて判定するようにする。安定運転状態が高スロットル開度でなされているときには、閾値を厳しく、すなわち少しの乖離量でも特性が大きく変化したと判定できるようにすることで、高スロットル開度でも特性変化が検知(学習が必要と判定)できるようにする。
【0076】
また、上記のように高スロットル開度で閾値を厳しくした場合、誤判定しやすくなる。そこで、上記実施例のように、複数回にわたって判定を行うことにより誤判定を回避することができる。
【0077】
また、特性変化判定手段にて特性が変化したと判断された場合には、アイドルストップを禁止にすれば、アイドルストップに移行すべきシーン(エンジン及びその搭載車両がアイドルストップを行う条件を満たす状態)において、アイドル運転状態を継続することができ、従前通り学習を行うことができる。
【0078】
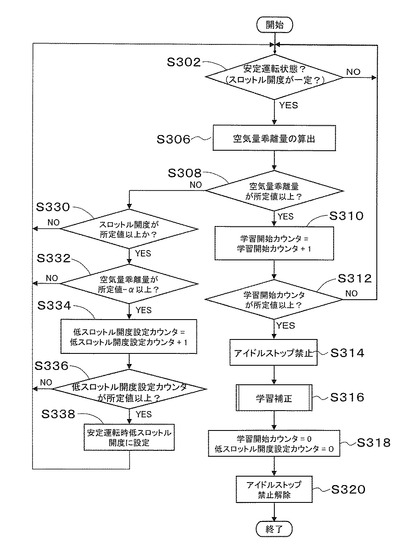
図9は、図5に示される第1実施例とは別の第2実施例のフローチャートを示す。
ここでは、安定運転状態のスロットル開度が大きく、かつ空気量乖離量が閾値近傍に滞在して開度-空気量特性が大きく変化したとは判定できない場合、TCUと協調して次回安定運転状態となったときに低スロットル開度にして特性変化の有無を判定するケースを示す。
図中S302からS320は、図5と基本的に同じ内容であるため、相違部分のみ説明する。
【0079】
図5ではS104にてスロットル開度が所定値以下か否かの判定があったが、今回スロットル開度の判定はS330にて行うようになっている。また、S318では、従来の学習開始カウンタのクリア処理に加え、低スロットル開度設定カウンタのクリア処理も追加している。
【0080】
S308で空気量乖離量が所定値以下の場合には、S330へ進む。S330ではスロットル開度が所定以上か否かを判定する。デポの影響を受ける低スロットル開度の場合には、S308での判定が正しいとしてそのまま、スタートに戻る。高スロットル開度の場合には、S332へ進み、再度空気量乖離量に応じて特性変化の有無を判定する。S332では空気量乖離量が閾値近傍か否かを判定し、S308での閾値よりα小さい「所定値−α」以上の場合には、開度-空気量特性変化が発生している可能性が高いとして、S334へ進み、低スロットル開度設定カウンタを1カウントアップさせる。S332でNOと判定された場合には、元に戻るが、その際、低スロットル開度設定カウンタをクリアしてもよい。その場合、連続してS332状態が成立した時のみS334以降の処理を実行できる構成となる。
【0081】
その後、S336では、低スロットル開度カウンタが所定値以上か否かを判断する。所定値以上の場合には、次回安定運転時に低スロットル開度となるようにTCUに通告し、元に戻る。次回安定運転時には、低スロットル開度となり、S302以下の処理を実行する。低スロットル開度での安定運転状態の場合には、能動的にスロットルを低開度にしているため、誤判定する可能性は低い。そのため、S308でYES判定した場合には、S310、S312をスルーして、S314に進み、アイドルストップ禁止させ、学習に移行させてもよい。なお、低スロットル開度でS308処理がNO判定の場合には、特性変化は無いため、低スロットル開度設定カウンタをクリアするとともに、次回安定運転時の低スロットル開度要求を取り下げる。
【0082】
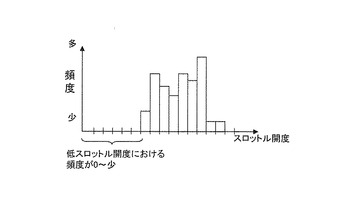
図10は、開度-空気量特性が大きく変化したか否かの判定(学習要否判定)が行われる毎にそのときのスロットル開度を記憶して、スロットル開度毎に前記学習要否判定が行われた頻度(回数)を示したグラフである。
【0083】
デポ付着の影響を受けやすい、低スロットル開度領域において頻度が0ないし少ない場合には、該頻度が0ないし少ないスロットル開度領域については強制的に前記安定運転状態を作り出す(次回の安定運転状態の時にときに低スロットル開度にする)。次回運転時は低スロットル開度で安定運転状態となるように制御し、そのタイミングでECUは、特性変化の有無判定(学習要否判定)を行う。これにより、低スロットル開度の分布が少ない運転シーンにおいても、確実に特性変化(学習要否)を判定することが可能となる。
【0084】
また、安定運転状態がそもそも存在しないような運転シーンにおいても、所定時間継続して安定運転状態が存在しなかった場合には、安定運転状態を強制的に作り出するようにすることで、特性変化(学習要否)判定を行うことが可能となる。この際、安定運転状態を作り出す際に、低スロットル開度要求も合わせて行うと、1回の安定運転状態で確実に特性変化判定を行うことができる。
【0085】
なお、本実施例では、非アイドル運転時における安定運転状態において学習要否判定をして学習が必要な場合には、アイドルストップを禁止して開度-空気量特性の変化分を学習することにより、学習精度を向上させているが、アイドルストップ禁止により燃費への跳ね返りが発生する。
【0086】
燃費への跳ね返りを抑えるために、安定運転状態で学習をしてもよい。その場合には吸気系の変動要因(VTC、パージ、EGR等)をすべて排除もしくは考慮して学習を行う構成とする。
【符号の説明】
【0087】
1 エンジン
4 吸気通路
8 ECU(エンジンコントロールユニット)
13 電制スロットル弁(ETC)
21 燃料噴射弁
22 点火プラグ
23 点火コイル
32 吸気弁
34 排気弁
42 スロットルセンサ
43 エアフローセンサ
45 クランク角センサ
46 カム角センサ
【技術分野】
【0001】
本発明は、エンジンの制御装置に係り、特に、エンジン及びその搭載車両の運転状態が所定条件を満たすとき、エンジンを一時的に停止させるアイドルストップを行うようにされたエンジンのスロットル弁の開度と吸入空気量との関係(以下、開度-空気量特性と称す)等のエンジン特性の変化を学習するようにされた制御装置に関する。
【背景技術】
【0002】
自動車の技術分野においては、燃費の向上や温室効果ガス排出量の低減化等を目的として、信号待ち状態等の、エンジン及びその搭載車両の状態が所定条件を満たすとき、エンジンを一時的に停止させるアイドルストップを行い、その後、ドライバのアクセル操作があったときなどに再始動させる技術が知られている。
【0003】
また、走行駆動源としてモータ(モータジェネレータ)とエンジンの両方を備えるハイブリット車両においても、走行中に運転者要求駆動力が所定値以下で、且つバッテリ充電のための発電運転が不要な場合等には、それまで走行駆動源としていたエンジンを停止させ、その後、運転者要求駆動力が所定値以上(例えばモータ発生トルク以上となったとき)、または、バッテリ充電が必要と判断されたときに、エンジン出力軸(クランク軸)に回転力を与え、エンジンを再始動させることも知られている。
【0004】
すなわち、これまでの車両では運転者がアクセル操作をしないシーンでもエンジンはアイドル運転を継続していたが、アイドルストップを行うようにされたハイブリッド車両を含む車両では燃費・排気性能等の向上のため、不要なアイドル運転はしないことになる。
【0005】
一般に、アイドル運転状態では、エンジン回転数が目標エンジン回転数に収束一致するようにフィードバック制御する、いわゆるアイドル回転数制御(ISC)が行われる。このアイドル回転数制御実行中は、運転状態が安定しているため、エンジンの個体差や経時劣化などを吸収するような各種学習が行われる(例えば下記特許文献1参照)。
【0006】
学習の一つとして、電制スロットル弁の開度(以下、スロットル開度と称す)と吸入空気量との関係(特性)の学習がある。
【0007】
詳細には、車載用エンジンに備えられる電制スロットル弁の制御システムでは、通常、予め実験等により求められたスロットル開度と吸入空気量との関係(開度-空気量特性)がコントロールユニット内の記憶装置に例えばテーブルやマップの形で記憶されており、エンジン運転時には、アクセル操作量等に基づいて目標吸入空気量を設定するとともに、実際に吸入される空気量(エアフローセンサにより検出される吸入空気量)が前記目標吸入空気量となるように、前記記憶されている開度-空気量特性を基準にそのとき要求されるスロットル開度を算出し、この算出されたスロットル開度となるように、スロットル弁(の弁体)をモータ等のアクチュエータにより回動させるようになっている。
【0008】
前記開度-空気量特性は、電制スロットル弁を含むエンジンの個体差や経時劣化等により相違・変化するため、例えば、アイドル運転時に、エアフローセンサで検出される吸入空気量、目標吸入空気量等を用いてスロットル開度を増減するフィードバック制御を行なう等して、開度-空気量特性の変化分(ずれ)を学習し、該学習で得られた特性変化分(学習値)を用いて前記記憶されている開度-空気量特性を補正するようにされている。
【0009】
また、ブローバイガス混入等に起因して、吸気通路におけるスロットル弁部分にガム質の異物等(以下、デポと称す)が付着すること等によっても、開度-空気量特性が変化(一般的にはスロットル開度に対し、吸入空気量が減少する方向)することから、定期的に前記特性変化分の学習を行って開度-空気量特性を補正する必要がある。
【0010】
また、エンジン回転数及び負荷が変化する過渡状態においては、エアフローセンサによる検出吸入空気量には、吸気管容積による位相遅れが発生するため、スロットル開度との相関関係確保の観点から、前記学習は、エンジンが安定した運転状態にあるとき、すなわちアイドル運転時に行なうのが一般的である。
【0011】
なお、前記開度-空気量特性としては、スロットル開度と吸入空気量との関係を用いるのが普通であるが、それに代えて、スロットル開度と吸気通路におけるスロットル弁部分の実効通路断面積(以下、スロットル開口面積と称す)との関係を用いる場合もある。
【0012】
ところが、前述のようにアイドルストップを行うようにされた車両においては、基本的にアイドル運転状態が存在しないため、前記学習の機会を確保することができない。
【0013】
そこで、所定距離走行したときやKEYONが所定回数行われたときにアイドルストップを禁止させて前記学習を行うことが知られている。しかし、この場合、学習が不要な場合でもアイドルストップを禁止するため、燃費悪化を招いたり、デポ付着が増えやすい地域走行時には、学習頻度が足りず、エンストやトルクずれが発生するおそれがある。
【0014】
こういった状況を回避するため、特許文献1では、非アイドル運転状態で学習を行うことが提案されている。
【先行技術文献】
【特許文献】
【0015】
【特許文献1】特開2010−65529号公報
【発明の概要】
【発明が解決しようとする課題】
【0016】
一般に、ハイブリッド車では燃費最適線を維持するようにエンジンが制御されるため、非アイドル運転状態でも安定運転状態が存在することになる。
【0017】
しかしながら、上記特許文献1では、前記安定運転状態についての言及がない。そのため、非アイドル運転時における過渡状態でも学習してしまうことにより、学習精度が低くなる可能性がある。
【0018】
本発明は、上記事情に鑑みてなされたもので、その目的とするところは、エンジン及びその搭載車両の状態が所定条件を満たすとき、エンジンを一時的に停止させるアイドルストップを行うようにされるとともに、スロットル開度と吸入空気量との関係(開度-空気量特性)等のエンジン特性の変化を学習するようにされたもとで、燃費の悪化を最小限に抑えつつ学習精度を高めることができて、エンスト防止、トルク制御精度等の向上を図ることのできるエンジンの制御装置を提供することにある。
【課題を解決するための手段】
【0019】
上記目的を達成すべく、本発明に係るエンジンの制御装置は、スロットル開度-空気量特性等のエンジン特性の特性変化分を学習して以前の特性を補正する学習手段と、非アイドル運転時において安定運転状態であるか否かを判定する安定運転状態判定手段と、該手段により前記安定運転状態であると判定されたとき、前記学習の要否を判定する学習要否判定手段と、該判定手段により前記学習が必要であると判定されたとき、アイドル運転状態等の安定運転状態に移行して前記学習手段に前記学習を実行させる学習移行手段と、を具備して構成される。
【発明の効果】
【0020】
一般に、アイドル運転で学習する制御の場合、学習要否の判定を行わず、成り行きのアイドル運転状態となったタイミングで常に学習するため、アイドル運転がほとんど存在しない車両では、学習ができない上に、学習が必要か否かの判定もできない状況となっている。
【0021】
そこで、上記のように学習要否判定手段を設け、非アイドル運転時における安定運転状態において学習の要否判定を行うことにより、アイドル運転状態がほとんど存在しないハイブリッド車でも学習の要否を判断することが可能となる。
【0022】
これにより、例えば、ハイブリッド車両では、学習が必要と判断された場合には、アイドルストップを禁止してアイドル運転へ移行させて学習を行うことができる。すなわち、学習が必要なシーンに限定して、アイドル運転へと移行させることが可能となるため、燃費の悪化を最小限に抑えることができるとともに、燃費の悪化を最小限に抑えつつ学習精度を高めることができて、エンスト防止、トルク制御精度等の向上を図ることができる。
上記した以外の、課題、構成、及び効果は、以下の実施形態により明らかにされる。
【図面の簡単な説明】
【0023】
【図1】本発明に係るエンジンの制御装置の一実施例を、それが適用されたハイブリッド車両用エンジンと共に示す概略構成図。
【図2】本発明に係るエンジンの制御装置の主要部を構成するECU周りの構成を示す図。
【図3】目標スロットル開度の演算例の説明に供されるブロック図。
【図4】目標トルク-スロットル開口面積(吸入空気量)-スロットル開度の関係の一例を示す相関図。
【図5】本発明第1実施例の開度-空気量特性の変化分の学習要否判定等を行う際の処理手順の一例を示すフローチャート。
【図6】図5のS106の乖離量算出の詳細な処理手順例を示すフローチャート。
【図7】開度-空気量特性の変化分の学習要否判定の説明に供される図。
【図8】開度-空気量特性の変化分の学習要否判定並びに学習補正の前後における各部の挙動・変化を示すタイムチャート。
【図9】本発明第2実施例の開度-空気量特性の変化分の学習要否判定等を行う際の処理手順の一例を示すフローチャート。
【図10】スロットル開度毎に学習要否判定が行われた頻度を示したグラフである。
【発明を実施するための最良の形態】
【0024】
以下、本発明の実施の形態を図面を参照しながら説明する。
図1は、本発明に係るエンジンの制御装置の一実施例を、それが適用されたハイブリッド車両用エンジンと共に示す概略構成図である。
【0025】
図示のエンジン1は、DOHC型の多気筒4サイクルエンジンであり、シリンダヘッド2Aとシリンダブロック2Bとからなるシリンダ2を備え、シリンダヘッド2Aには、吸気弁32用のカム軸31と、排気弁34用のカム軸33が配設され、シリンダブロック2Bにはピストン5が摺動自在に嵌挿され、ピストン5上方には、所定形状の燃焼室(天井ないしルーフ部)を持つ燃焼作動室3が画成され、この燃焼作動室3には、点火コイル等からなる点火ユニット23に接続された点火プラグ22が臨設されている。
【0026】
燃料の燃焼に供せられる空気は、エアークリーナ11から、ホットワイヤ式等のエアフローセンサ43や電制スロットル弁13が配在されたスロットルボディ(管状通路部分)12、コレクタ14、吸気マニホールド(多岐管)15、吸気ポート16等からなる吸気通路4を通り、その下流端(吸気ポート16端部)に配在された吸気弁32を介して各気筒の燃焼作動室3に吸入される。また、吸気通路4の下流部分(吸気マニホールド15)には、各気筒毎に、吸気ポート16に向けて燃料を噴射する燃料噴射弁21が臨設されるとともに、吸気圧センサ44が配設されている。なお、前記スロットルボディ12には、電制スロットル弁13の開度を検出するスロットル(開度)センサ42に取り付けられている。
【0027】
一方、クランク軸7の一端にはクランクプーリ36が取付固定され、吸気弁32を開閉するための吸気カム軸31の一端には吸気カムプーリ37が外嵌固定され、排気弁34を開閉するための排気カム軸33の一端には排気カムプーリ38が外嵌固定されている。各プーリ36,37,38の外周部には歯が設けられており、各プーリ36、37、38にはタイミングベルト(図示省略)が掛け回され、このタイミングベルトによりクランク軸7の回転が吸気カム軸31及び排気カム軸33に伝達されるようになっている。なお、吸気カムプーリ37及び排気カムプーリ38に対するクランクカムプーリ36の回転数比は1:2となっている。
【0028】
燃焼作動室3に吸入された空気と燃料噴射弁21から噴射された燃料との混合気は、点火プラグ22による火花点火により燃焼せしめられ、その燃焼廃ガス(排気ガス)は、燃焼作動室3から排気弁34を介して排気ポート、排気マニホールド、排気浄化用触媒(例えば三元触媒)48が設けられた排気管等からなる排気通路6を通って外部(大気中)に排出される。排気通路6における触媒48より上流側には酸素濃度センサ(空燃比センサ)47が配在されている。
【0029】
また、各気筒毎に配備された燃料噴射弁21には、燃料タンク内の燃料(ガソリン等)が、クランク軸7により回転駆動される燃料ポンプや燃圧レギュレータ等を備えた燃料供給機構により所定燃圧に調圧されて供給され、燃料噴射弁21は、本実施例のエンジンの制御装置の主要部を構成するエンジンコントロールユニット(以下、ECUと称す)8から供給される、そのときの運転状態に応じたパルス幅(開弁時間に相当する)を持つ駆動パルス信号により開弁駆動され、その開弁時間に応じた量の燃料を吸気ポート16に向けて噴射するようになっている。
【0030】
また、エンジン1には、エンジン冷却水温を検出する水温センサ41、クランク軸7(に固着された歯付き円板)の回転角度を検出して、クランク軸7の回転位置を表す角度信号を出力するクランク角センサ45、吸気弁32を駆動するカム軸31(に固着された歯付き円板35)の回転角度を検出して、カム軸31の回転位置を表す角度信号を出力するカム角センサ46等が配備されており、それらから得られる信号もECU8に供給される。
【0031】
本実施例のECU8は、そのハードウェア自体はよく知られたもので、図2に示される如くに、その主要部が、MPU8a、EP-ROM8b、RAM8c、及びA/D変換器を含むI/O用LSI8d等で構成される。
【0032】
I/O用LSI8dの入力側には、クランク角センサ45、カム角センサ46、水温センサ41、スロットルセンサ42、エアフローセンサ43、吸気管内圧センサ44、空燃比センサ47を含む各種のセンサ類からの信号が供給される。
【0033】
また、本実施例のエンジンの制御装置8が適用されるハイブリッド車では、ECU8とは別に、マイクロコンピュータを内蔵した統合コントロールユニット(以下、TCUと称す)9を有しており、TCU9からECU8へ、実現すべき目標トルク要求やエンジンを一時的に停止させるアイドルストップ要求、アイドルストップを禁止させるアイドルストップ禁止要求などをCAN通信等のユニット間通信によりデータ送受信が行われる。
【0034】
ECU8は、これらの入力信号やユニット間通信信号に基づいて所定の演算処理を実行し、この演算結果として算定された各種の制御信号をI/O用LSI8dから出力し、アクチュエータである電制スロットル弁13、燃料噴射弁21、点火コイル23等に向けて所定の制御信号を供給して、スロットル開度制御、燃料噴射制御、点火時期制御等を実行する。
【0035】
次に、スロットル弁13の開度-吸入空気量特性(開度-空気量特性)の変化分の学習に関与する制御について、図3のブロック図及び図4のグラフを参照しながら説明する。
【0036】
まず、運転者によるアクセル操作による要求トルク及び外部要求トルクを含むTCU9からの要求トルクに基づいて目標トルク(1)を演算する。演算された目標トルク(1)からエンジン特性に応じて一義的に求まる駆動力要求分としてのスロットル開口面積(吸入空気量に相当する)(2)を演算する。
【0037】
これとは別に、ISC制御空気量としてアクセルOFF時いわゆるアイドル運転状態でのエンジン回転数保持分を目標回転数と実エンジン回転数から演算し、トルク要求分と同様にISC相当開口面積(3)を算出する。演算された駆動力要求分開口面積(2)とISC相当開口面積(3)を加算して、現在の運転状態に必要なスロットル開口面積(4)とする。このスロットル開口面積(4)は、現在の運転状態に必要な吸入空気量に相当する。
【0038】
次に、吸入空気量とスロットル開口面積とスロットル開度とは相関関係にあることから、例えば予め記憶装置(EP−ROM8b)に記憶されているスロットル開度-スロットル開口面積特性(前述したスロットル開度-吸入空気量特性と同じく、開度-空気量特性と称する)を表すマップから目標スロットル開口面積(4)に相当するスロットル開度を読み出すことにより、最終的な目標スロットル開度(5)を求め、求められた開度(5)となるようにスロットル弁(の弁体)13を回動させる制御を行なう。
【0039】
ところが、デポ付着等の経年変化により、スロットル開度を前記(5)にしても、実際のスロットル開口面積(吸入空気量)が前記(4)とはならず、吸入空気量に過不足が生じ、所要のトルクが得られない場合がある。
【0040】
詳しくは、前述した予め記憶装置に記憶されている開度-空気量特性はあくまで初期特性であるため、デポ付着等の経年変化により、実際の開度-空気量特性は、初期開度-空気量特性からは変化しており、この変化が大きいと、初期開度-空気量特性を用いて求めたスロットル開度では結果的に吸入空気量が不足したり過剰になったりすることになる。言い換えれば、例えば、前記デポ付着が発生すると、スロットル開口面積が狭くなり、アクセル操作量等に応じて設定される目標吸入空気量を得るためにはスロットル開度をより大きくする必要がある。
【0041】
なお、図3においてハイブリッド車両では、エンジンが実現すべき目標トルクは統合コントロール装置によって算出されるために、目標トルク(1)算出にあたっては、アクセル開度の代わりに統合コントロール装置からの目標トルク要求が使われる。
【0042】
上述のようにデポ付着等の経年変化による開度-空気量特性変化を学習によって補正する必要があるが、吸気管容積による位相遅れが存在するため、前記開度-空気量特性(の変化)の学習は、通常、運転状態が安定するアイドル運転状態で行っている。しかし、前述のとおり、アイドルストップ機能を有する車両においては、基本的にアイドル運転点が存在しないため、前記学習を行うことができない。
【0043】
そこで、本第1実施例では、非アイドル運転時において安定運転状態であるか否かを判定するとともに、安定運転状態である場合には学習要否を判定し、学習が必要な場合には、アイドルストップを禁止をすることにより、学習用のアイドル運転状態を作り出し、ECU8の特性記憶手段(EP-ROM8b)に記憶されている前記スロットル弁13の開度と吸入空気量との関係をあらわす開度-空気量特性の特性変化分を学習して、前記特性記憶手段に記憶されている以前の特性を補正するようにされ、ECU8は、前記特性記憶手段に記憶されている最新の開度-空気量特性を用いて前記スロットル弁13を制御するようにされる。
【0044】
以下、図5のフローチャートを参照しながら、詳細に説明する。
まず、ステップS102(以下、ステップは省略)で安定運転状態か否かを判断する。ここでは安定運転状態であるか否かをスロットル開度が一定であるか否か(開度変化の有無)で判定している。スロットル開度が一定であれば、多少の空気の位相遅れが存在するとしても基本的に定常状態になる。他にエンジン回転数の変化が所定値以内、吸入空気量の変化が所定値以内、吸気圧の変化が所定値以内などの条件を追加してもよい。また、暖機運転や発電運転なども前述の条件が満たされるため、安定運転状態に含めることが可能である。
【0045】
S102で安定運転状態ではないと判断された場合には元に戻り、安定運転状態になるまで待つ。安定運転状態が開始された場合には、S104に進んでスロットル開度が所定値以下か否かを判断する。一般にデポ付着による開度-空気量特性変化の影響は低スロットル開度で顕在化し、高スロットル開度ではほとんど影響が出ない。そのためスロットル開度が小さい場合のみ以下の処理を実行する。このS104の判断に使用する閾値は、ハイブリッド車両で取りうる頻度の開度と開度-空気量特性変化の影響が顕在化する開度とから予め求めておく。
【0046】
スロットル開度が前記閾値(所定値)以下の場合にはS106に進んで開度-空気量特性の変化分を求める。ここでは、開度-空気量特性変化分として、スロットルセンサ42により検出されるスロットル開度から求めた開口面積とエアフローセンサ43により検出される空気量から求めた開口面積とのずれを空気量乖離量として算出する。なお、詳細は図6を参照して後述する。
【0047】
S108では、S106で算出された空気量乖離量が所定値(閾値)以上か否かを判断する。所定値以上の場合には、空気量がずれている、即ち開度-空気量特性が変化しているとしてS110へ進み、学習開始カウンタを一つインクリメントする。所定値以内の場合には、開度-空気量特性変化が無いとして元に戻る。元に戻るときに、学習開始カウンタをクリアする構成にして、連続して空気量乖離量が所定値以上の状態が続いた時のみカウントアップしていくようにしてもよい。なお、開度-空気量特性変化の有無を判定する閾値に関しては図7を用いて後述する。
【0048】
S112では、学習開始カウンタが所定値以上か否かを判断する。これは、非アイドル運転状態で乖離量の大小を判定しているため、誤判定を防止するために、複数回開度-空気量特性の変化を検出するようにしている。
【0049】
学習開始カウンタが所定値以上の場合には、S114へ進み、TCU9に対してアイドルストップ禁止要求を送信する。TCU9では、モータとエンジンの状態を考慮して、エンジントルク要求が無い場合に、アイドル運転状態へと移行する。このアイドル運転状態では、S116にて、いわゆるアイドル回転数制御(ISC)を行って、開度-空気量特性の変化分(学習値)を求め、特性変化分(学習値)を用いて前記記憶されている開度-空気量特性を補正する学習補正を行う(この学習補正自体は当該技術分野ではよく知られているので詳細な説明は省略する)。
【0050】
上記学習補正終了後には、S118に進んで、学習開始カウンタをクリアするとともに、S120にてアイドルストップ禁止要求を解除するようにTCU9へ送信するとともに、エンジンを停止(IGスイッチOFF)させる。
【0051】
次に、図5のS104で行われる空気量乖離量の算出を、図6のフローチャートを使用して説明する。
本空気量乖離量算出は、空気量を開口面積情報の次元に換算して行う方法であるが、スロットル開度情報の次元および空気量情報の次元に換算してもよい。
【0052】
S202では、スロットルセンサ42によって検出されたスロットル開度TPO1から前回の特性変化分の学習値TVOFQL(初期値は0)を減算して補正スロットル開度TPO1QLを算出する。すなわち、学習をしていない状態のスロットル開度を基準とする。
【0053】
S204では、前記補正スロットル開度TPO1QLを開度-面積変換のテーブルを使用して、スロットル開度相当開口面積ATPO1に変換する。
【0054】
一方、S208ではエアフローセンサ43により検出される質量流量TPを読み込む。そしてS210では、質量流量TPに基準状態(標準状態)での質量流量→体積流量変換係数TPQHを乗じることにより、基準状態での体積流量比TPQH0を算出する。
【0055】
S212では、体積流量比TPQH0から体積流量比-開口面積/吸引容積相当変換テーブルから開口面積/吸引容積相当ADNVQLを算出する。なお、体積流量比-面積/吸引容積相当変換テーブルは、スロットル開口面積が小さいところでは、ソニック流となって開口面積が増大に対して体積流量が比例的に増大するが、開口面積が増大するにつれて飽和状態に近づく特性となる。
【0056】
S214では開口面積/吸引容積相当ADNVQLにエンジン排気量VOLとエンジン回転速度NEを乗じることによりTP相当開口面積TPAを算出する。
【0057】
S216では、S206で求めたスロットル相当開口面積ATPOとS214で求めたTP相当開口面積TPAの差分を取り開口面積乖離量ΔQAAを算出する。
【0058】
開度-空気量特性変化が無い場合にはΔQAAが略零となるが、開度-空気量特性変化が大きければ大きいほどΔQAAの値が大きくなる。即ちΔQAAの値が大きい場合には、開度-空気量特性が大きく変化したとみなすことが可能となる。
【0059】
次に、開度-空気量特性が大きく変化したか否かの判定(学習要否判定)に関して図7を用いて説明する。
【0060】
開口面積乖離量ΔQAAが所定値以上の場合には、開度-空気量特性が大きく変化したと判定できるが、本実施例では安定運転状態として、スロットル開度が一定になってから本開口面積乖離量演算を開始する構成としているため、スロットル開度一定となって安定運転状態となった直後は吸気系の位相遅れにより空気量が一定となるまでに時間がかかることになる。その間、前運転状態の吸気系の影響を受けるため、開口面積乖離量が振れて、閾値を超えてしまい、本来開度-空気量特性にさほど変化が無い場合でも、誤判定してしまうおそれがある。一方、空気量が一定となる状態となってから演算を開始した場合には、特性変化判定に時間がかかることになる。
【0061】
ハイブリッド車は、最適燃費線を維持するとはいえ、非アイドル運転状態であるため、安定運転状態が短い可能性もあり、早期に開度-空気量特性き変化を検知する必要がある。そこで、安定運転状態移行直後の判定用閾値は大きくし、時間経過とともに閾値を小さくするような構成とすることで、特性変化有無(学習要否)の早期判定と誤判定回避を両立させる。なお、更なる誤判定を防止するために、図5のS108〜S112のように開度-空気量特性変化が複数回検知された場合のみ開度-空気量特性変化したと判定するようにしている。
【0062】
また、スロットル開度によって特性変化の影響代は異なるため、スロットル開度に応じて閾値を可変とするような構成を上記に加えてもよい。
【0063】
図7において、実線が開度-空気量特性変化が無い場合のΔQAA、一点鎖線がETC特性変化が有る場合のΔQAAを示す。破線が開度-空気量特性変化の有無を判定する閾値を示しており、破線内にΔQAAが存在していれば、開度-空気量特性変化が無いことを表している。前述したように、この閾値は、時間経過とともに小さくなるように設定されている。
【0064】
時点T1にてスロットル開度が一定となって、安定運転状態に移行し、開口面積乖離量演算が開始される。開始直後は、吸気系の位相遅れにより大きく振れており、次第に所定値へ収束していく。実線のように開度-空気量特性変化が無い場合でも安定運転状態に移行直後はΔQAAが大きく振れているが、このときは閾値が大きく設定されているため誤判定には至らない。開度-空気量特性変化(学習要否判定)の最終判定は、安定運転状態から外れた時点T2で行うことになる。
【0065】
当然のことながら、安定運転状態が長く続いたほうが、即ち時点T1からT2までの時間が長いほど誤検出の可能性が低くなることから、安定運転状態の継続時間に応じて開度-空気量特性変化検出の重み付けを行っても良い。例えば、安定運転状態継続時間が長いほど図5のS110における学習開始カウンタの増加量を1固定ではなく、大きくするような構成としてもよい。
【0066】
次に図8のタイムチャートを用いて、本実施例の各部の挙動・変化を説明する。
図8では、簡単のため開度-空気量特性変化有無判定用の閾値は一点定数としている(△QAAのタイムチャートに記載)。
【0067】
非アイドル運転状態で運転しているが、時点T1にて安定運転状態となるため、このタイミングから開度-空気量特性変化の検出を開始し、時点T2で非安定運転状態となったタイミングで最終の開度-空気量特性変化判定を実行する。開口面積乖離量ΔQAAは開度-空気量特性変化の有無(学習要否)判定用閾値よりも大きい、即ち開度-空気量特性に変化があると判定されるため、学習開始カウンタを一つインクリメントする。同様に非アイドル運転状態における安定運転状態(時点T3〜T4、時点T5〜T6)で開度-空気量特性変化判定を実行していき、時点T6において学習開始カウンタが学習開始判定閾値(回数)を上回ることにより、アイドルストップ禁止要求を出す。アイドルストップ(I/S)禁止要求を受けてTCUはアイドル運転に移行できるタイミング(T7)でアイドル運転状態となる。このタイミングで開度-空気量特性変化分の学習は実行され、学習補正終了(T8)とともにアイドルストップ禁止要求をクリアすることによりアイドルストップへ移行する。その後、時点T9〜T10において、安定運転状態となるが、すでに空気量学習が終了している、即ち開度-空気量特性が正しく補正されているため、ΔQAAの値は小さくなっている。
【0068】
上記のように本第1実施例では、非アイドル運転時でも安定運転状態が存在するハイブリッド車両の特徴を生かし、非アイドル運転時における安定運転状態において開度-空気量特性が大きく変化したか否かの判定(学習要否判定)を行い、学習が必要な場合には、アイドル運転状態に移行させて特性変化分の学習を行うようにされる。そのため、学習が必要な場合のみ学習が行われるので、燃費と学習精度向上の両立を図ることができる。
【0069】
より詳細には、一般に、アイドル運転状態で学習する場合、学習要否の判定を行わず、成り行きのアイドル運転状態となったタイミングで常に学習するため、アイドル運転がほとんど存在しない車両では、学習ができない上に、学習が必要か否かの判定もできない状況となっている。
【0070】
そこで、上記のように、非アイドル運転時の安定運転状態で学習の要否判定を行うことにより、アイドル運転状態がほとんど存在しない車両でも学習の要否を的確に判断することが可能となる。
【0071】
これにより、例えば、ハイブリッド車両では、学習が必要と判断された場合には、アイドルストップを禁止してアイドル運転へ移行させて学習を行うことができる。すなわち、学習が必要なシーンに限定して、アイドル運転へと移行させることが可能となるため、燃費の悪化を最小限に抑えることができる。
【0072】
また、学習要否を判定するために、開度-空気量特性として例えばマップの形で記憶されている、そのときのスロットル開度に対応する吸入空気量とエアフローセンサにより検出される実吸入空気量との乖離量を算出し、その乖離量が所定値(閾値)を越えたいる場合に学習に移行させることにより、必要なシーンに限定して学習を行うため、燃費悪化を最小限にすることが可能となる。また、エンジンの安定運転状態、即ち空気量が安定している状態で学習要否判定を行うため、要否判定の精度は高く、確実に必要な時に、学習を行うことが可能となる。
【0073】
さらに、学習要否判定は、吸入空気量の変動が無い状態がもっとも精度よく判定を行うことができる。そこで、空気量変動が少なくなる状態を安定運転状態とし、その状態で学習要否判定を行う構成とすることで、誤判定するのを防止することができる。
【0074】
吸気系の位相遅れやエアフローセンサの応答遅れなどにより、安定運転状態移行直後は、空気量が大きく振れる可能性があるため、特性変化判定の判定閾値を一点定数とした場合、誤判定してしまう可能性ある。一方、吸入空気量が十分安定してから判定を開始した場合には、判定終了までに時間がかかり、場合によっては判定終了するまえにエンジン安定運転状態から外れてしまい、そもそも判定ができなくなってしまう恐れもある。限られたエンジン安定運転状態で早期に判定するためにも、判定は安定運転状態移行直後から開始するのが望ましい。そこで、上記実施例のように、時間の経過に伴って閾値を変化、例えば、時間の経過とともに閾値を厳しくするような構成とすれば、安定運転状態移行直後での誤判定を防止することが可能となる。
【0075】
一般に、デポ付着、詰まり等に起因する開度-空気量特性の変化は、スロットル開度が低い(小さい)ほど影響を受けやすく、スロットル開度が高い(大きい)ほど影響を受けにくい。そのため、上記実施例のようにスロットル開度に応じて閾値を変化させて判定するようにする。安定運転状態が高スロットル開度でなされているときには、閾値を厳しく、すなわち少しの乖離量でも特性が大きく変化したと判定できるようにすることで、高スロットル開度でも特性変化が検知(学習が必要と判定)できるようにする。
【0076】
また、上記のように高スロットル開度で閾値を厳しくした場合、誤判定しやすくなる。そこで、上記実施例のように、複数回にわたって判定を行うことにより誤判定を回避することができる。
【0077】
また、特性変化判定手段にて特性が変化したと判断された場合には、アイドルストップを禁止にすれば、アイドルストップに移行すべきシーン(エンジン及びその搭載車両がアイドルストップを行う条件を満たす状態)において、アイドル運転状態を継続することができ、従前通り学習を行うことができる。
【0078】
図9は、図5に示される第1実施例とは別の第2実施例のフローチャートを示す。
ここでは、安定運転状態のスロットル開度が大きく、かつ空気量乖離量が閾値近傍に滞在して開度-空気量特性が大きく変化したとは判定できない場合、TCUと協調して次回安定運転状態となったときに低スロットル開度にして特性変化の有無を判定するケースを示す。
図中S302からS320は、図5と基本的に同じ内容であるため、相違部分のみ説明する。
【0079】
図5ではS104にてスロットル開度が所定値以下か否かの判定があったが、今回スロットル開度の判定はS330にて行うようになっている。また、S318では、従来の学習開始カウンタのクリア処理に加え、低スロットル開度設定カウンタのクリア処理も追加している。
【0080】
S308で空気量乖離量が所定値以下の場合には、S330へ進む。S330ではスロットル開度が所定以上か否かを判定する。デポの影響を受ける低スロットル開度の場合には、S308での判定が正しいとしてそのまま、スタートに戻る。高スロットル開度の場合には、S332へ進み、再度空気量乖離量に応じて特性変化の有無を判定する。S332では空気量乖離量が閾値近傍か否かを判定し、S308での閾値よりα小さい「所定値−α」以上の場合には、開度-空気量特性変化が発生している可能性が高いとして、S334へ進み、低スロットル開度設定カウンタを1カウントアップさせる。S332でNOと判定された場合には、元に戻るが、その際、低スロットル開度設定カウンタをクリアしてもよい。その場合、連続してS332状態が成立した時のみS334以降の処理を実行できる構成となる。
【0081】
その後、S336では、低スロットル開度カウンタが所定値以上か否かを判断する。所定値以上の場合には、次回安定運転時に低スロットル開度となるようにTCUに通告し、元に戻る。次回安定運転時には、低スロットル開度となり、S302以下の処理を実行する。低スロットル開度での安定運転状態の場合には、能動的にスロットルを低開度にしているため、誤判定する可能性は低い。そのため、S308でYES判定した場合には、S310、S312をスルーして、S314に進み、アイドルストップ禁止させ、学習に移行させてもよい。なお、低スロットル開度でS308処理がNO判定の場合には、特性変化は無いため、低スロットル開度設定カウンタをクリアするとともに、次回安定運転時の低スロットル開度要求を取り下げる。
【0082】
図10は、開度-空気量特性が大きく変化したか否かの判定(学習要否判定)が行われる毎にそのときのスロットル開度を記憶して、スロットル開度毎に前記学習要否判定が行われた頻度(回数)を示したグラフである。
【0083】
デポ付着の影響を受けやすい、低スロットル開度領域において頻度が0ないし少ない場合には、該頻度が0ないし少ないスロットル開度領域については強制的に前記安定運転状態を作り出す(次回の安定運転状態の時にときに低スロットル開度にする)。次回運転時は低スロットル開度で安定運転状態となるように制御し、そのタイミングでECUは、特性変化の有無判定(学習要否判定)を行う。これにより、低スロットル開度の分布が少ない運転シーンにおいても、確実に特性変化(学習要否)を判定することが可能となる。
【0084】
また、安定運転状態がそもそも存在しないような運転シーンにおいても、所定時間継続して安定運転状態が存在しなかった場合には、安定運転状態を強制的に作り出するようにすることで、特性変化(学習要否)判定を行うことが可能となる。この際、安定運転状態を作り出す際に、低スロットル開度要求も合わせて行うと、1回の安定運転状態で確実に特性変化判定を行うことができる。
【0085】
なお、本実施例では、非アイドル運転時における安定運転状態において学習要否判定をして学習が必要な場合には、アイドルストップを禁止して開度-空気量特性の変化分を学習することにより、学習精度を向上させているが、アイドルストップ禁止により燃費への跳ね返りが発生する。
【0086】
燃費への跳ね返りを抑えるために、安定運転状態で学習をしてもよい。その場合には吸気系の変動要因(VTC、パージ、EGR等)をすべて排除もしくは考慮して学習を行う構成とする。
【符号の説明】
【0087】
1 エンジン
4 吸気通路
8 ECU(エンジンコントロールユニット)
13 電制スロットル弁(ETC)
21 燃料噴射弁
22 点火プラグ
23 点火コイル
32 吸気弁
34 排気弁
42 スロットルセンサ
43 エアフローセンサ
45 クランク角センサ
46 カム角センサ
【特許請求の範囲】
【請求項1】
スロットル開度-吸入空気量特性等のエンジン特性の特性変化分を学習して以前の特性を補正する学習手段と、
非アイドル運転時において安定運転状態であるか否かを判定する安定運転状態判定手段と、
該手段により前記安定運転状態であると判定されたとき、前記学習の要否を判定する学習要否判定手段と、
該判定手段により前記学習が必要であると判定されたとき、アイドル運転状態等の安定運転状態に移行して前記学習手段に前記学習を実行させる学習移行手段と、を具備して構成されたエンジンの制御装置。
【請求項2】
走行用駆動源として電制スロットル弁を有するエンジンとモータの両方が搭載されているハイブリッド車用のエンジンの制御装置であって、
特性記憶手段に記憶されている前記スロットル弁の開度と吸入空気量との関係をあらわす開度-空気量特性の特性変化分を学習して、前記特性記憶手段に記憶されている以前の特性を補正する学習手段と、
非アイドル運転時において安定運転状態であるか否かを判定する安定運転状態判定手段と、
該手段により前記安定運転状態であると判定されたとき、前記学習の要否を判定する学習要否判定手段と、
前記学習要否判定手段により前記学習が必要であると判定されたとき、前記安定運転状態において、前記学習手段に前記学習補正を実行させる学習移行手段と、
前記特性記憶手段に記憶されている最新の開度-空気量特性を用いて前記スロットル弁を制御するスロットル弁制御手段と、を備え、
前記学習要否判定手段は、前記安定運転状態において、前記特性記憶手段に記憶されているそのときのスロットル弁の開度に対応する吸入空気量と実吸入空気量との乖離量を求め、該乖離量とそれについて設定された閾値とを用いて前記学習の要否を判定することを特徴とするエンジンの制御装置。
【請求項3】
前記安定運転状態判定手段は、非アイドル運転時において、前記スロットル弁の開度、エンジン回転数、及び実吸入空気量のうちの少なくとも一つが所定時間以上継続して所定範囲内にある場合に、安定運転状態であると判定することを特徴とする請求項2に記載のエンジンの制御装置。
【請求項4】
前記学習要否判定手段は、前記乖離量についての閾値を時間の経過に伴って変化させることを特徴とする請求項2又は3に記載のエンジンの制御装置。
【請求項5】
前記学習要否判定手段は、前記乖離量についての閾値を前記スロットル弁の開度に応じて変化させることを特徴とする請求項2から4のいずれかに記載のエンジンの制御装置。
【請求項6】
前記学習要否判定手段は、前記乖離量が前記閾値を越えた回数をカウントするとともに、その累積回数が、要否判定用回数を越えた場合に、前記学習が必要であると判定することを特徴とする請求項2から5のいずれかに記載のエンジンの制御装置。
【請求項7】
前記学習移行手段は、前記エンジン及びその搭載車両がアイドルストップを行う条件を満たす状態であっても、前記学習要否判定手段により前記学習が必要であると判定されたときは、前記アイドルストップを禁止することを特徴とする請求項2から6のいずれかに記載のエンジンの制御装置。
【請求項8】
前記学習要否判定手段は、成り行きのスロットル開度で要否判定を行う第一の要否判定手段と、スロットル開度を成り行きの開度から強制的に小さくして要否判定を行う第二の要否判定手段を備えていることを特徴とする請求項2から7のいずれかに記載のエンジンの制御装置。
【請求項9】
前記学習要否判定手段は、前記乖離量が前記閾値未満かつ閾値近傍にある場合には、前記モータと協調して、前記第二の要否判定手段により要否判定を行うことを特徴とする請求項8に記載のエンジンの制御装置。
【請求項10】
前記安定運転状態にならない状態が所定時間以上継続した場合には、前記安定運転状態を強制的に作り出すようにされていることを特徴とする請求項2から9のいずれかに記載のエンジンの制御装置。
【請求項11】
前記学習要否判定が行われる毎にそのときのスロットル開度を記憶して、スロットル開度毎に前記学習要否判定が行われた頻度を求め、該頻度が所定値以下のスロットル開度領域については強制的に前記安定運転状態を作り出すことを特徴とする請求項2から10のいずれかに記載のエンジンの制御装置。
【請求項1】
スロットル開度-吸入空気量特性等のエンジン特性の特性変化分を学習して以前の特性を補正する学習手段と、
非アイドル運転時において安定運転状態であるか否かを判定する安定運転状態判定手段と、
該手段により前記安定運転状態であると判定されたとき、前記学習の要否を判定する学習要否判定手段と、
該判定手段により前記学習が必要であると判定されたとき、アイドル運転状態等の安定運転状態に移行して前記学習手段に前記学習を実行させる学習移行手段と、を具備して構成されたエンジンの制御装置。
【請求項2】
走行用駆動源として電制スロットル弁を有するエンジンとモータの両方が搭載されているハイブリッド車用のエンジンの制御装置であって、
特性記憶手段に記憶されている前記スロットル弁の開度と吸入空気量との関係をあらわす開度-空気量特性の特性変化分を学習して、前記特性記憶手段に記憶されている以前の特性を補正する学習手段と、
非アイドル運転時において安定運転状態であるか否かを判定する安定運転状態判定手段と、
該手段により前記安定運転状態であると判定されたとき、前記学習の要否を判定する学習要否判定手段と、
前記学習要否判定手段により前記学習が必要であると判定されたとき、前記安定運転状態において、前記学習手段に前記学習補正を実行させる学習移行手段と、
前記特性記憶手段に記憶されている最新の開度-空気量特性を用いて前記スロットル弁を制御するスロットル弁制御手段と、を備え、
前記学習要否判定手段は、前記安定運転状態において、前記特性記憶手段に記憶されているそのときのスロットル弁の開度に対応する吸入空気量と実吸入空気量との乖離量を求め、該乖離量とそれについて設定された閾値とを用いて前記学習の要否を判定することを特徴とするエンジンの制御装置。
【請求項3】
前記安定運転状態判定手段は、非アイドル運転時において、前記スロットル弁の開度、エンジン回転数、及び実吸入空気量のうちの少なくとも一つが所定時間以上継続して所定範囲内にある場合に、安定運転状態であると判定することを特徴とする請求項2に記載のエンジンの制御装置。
【請求項4】
前記学習要否判定手段は、前記乖離量についての閾値を時間の経過に伴って変化させることを特徴とする請求項2又は3に記載のエンジンの制御装置。
【請求項5】
前記学習要否判定手段は、前記乖離量についての閾値を前記スロットル弁の開度に応じて変化させることを特徴とする請求項2から4のいずれかに記載のエンジンの制御装置。
【請求項6】
前記学習要否判定手段は、前記乖離量が前記閾値を越えた回数をカウントするとともに、その累積回数が、要否判定用回数を越えた場合に、前記学習が必要であると判定することを特徴とする請求項2から5のいずれかに記載のエンジンの制御装置。
【請求項7】
前記学習移行手段は、前記エンジン及びその搭載車両がアイドルストップを行う条件を満たす状態であっても、前記学習要否判定手段により前記学習が必要であると判定されたときは、前記アイドルストップを禁止することを特徴とする請求項2から6のいずれかに記載のエンジンの制御装置。
【請求項8】
前記学習要否判定手段は、成り行きのスロットル開度で要否判定を行う第一の要否判定手段と、スロットル開度を成り行きの開度から強制的に小さくして要否判定を行う第二の要否判定手段を備えていることを特徴とする請求項2から7のいずれかに記載のエンジンの制御装置。
【請求項9】
前記学習要否判定手段は、前記乖離量が前記閾値未満かつ閾値近傍にある場合には、前記モータと協調して、前記第二の要否判定手段により要否判定を行うことを特徴とする請求項8に記載のエンジンの制御装置。
【請求項10】
前記安定運転状態にならない状態が所定時間以上継続した場合には、前記安定運転状態を強制的に作り出すようにされていることを特徴とする請求項2から9のいずれかに記載のエンジンの制御装置。
【請求項11】
前記学習要否判定が行われる毎にそのときのスロットル開度を記憶して、スロットル開度毎に前記学習要否判定が行われた頻度を求め、該頻度が所定値以下のスロットル開度領域については強制的に前記安定運転状態を作り出すことを特徴とする請求項2から10のいずれかに記載のエンジンの制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−2386(P2013−2386A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−135268(P2011−135268)
【出願日】平成23年6月17日(2011.6.17)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月17日(2011.6.17)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
[ Back to top ]