
エンジンの回転数制御装置
【発明の詳細な説明】
【0001】
【産業上の利用分野】この発明は、アクセル位置に対応してエンジン回転数を制御する電子制御式の回転数制御装置において、所望の回転数を維持して運転できるようにした装置の改良に関するものである。
【0002】
【従来の技術】トラクタ等の農作業用の作業機では、ある作業をしながら圃場内を端から端まで一定のエンジン回転数を保って直進した後Uターンし、また同じ作業を行うという作業パターンが多い。このため、少なくとも2種類の所望の回転数を記憶できるようにし、ボタン操作で回転数を切り替えできるようにした制御装置が提案されている(例えば特開平1−195933号公報参照)。
【0003】しかしながら、上記のような従来技術では作業時にボタン操作とアクセル操作の両方を行う必要があり、操作が煩雑である。またエンジン回転数を下げるためには、ボタン操作で設定回転数を低い方に切り替えるか、回転数を自動的に維持する制御を解除した上でアクセル操作量を減らすかアクセル操作を中止するかしないと回転数を下げることができず、危険な時などに素早く対応しにくいという問題もある。
【0004】
【発明が解決しようとする課題】この発明は上記のような問題点に着目し、アクセルを操作している状態で所望の回転数を維持でき、しかも一定範囲を越えてアクセルを操作すると自動的にアクセル位置に対応した回転数で運転できるようにすることを課題としてなされたものである。
【0005】
【課題を解決するための手段】上記の課題を達成するために、この発明では、検出されたアクセル位置に応じて、アクセル位置に対応する目標回転数を定めたマップによる所定の目標回転数を得るべくエンジンへの燃料供給量を制御するように構成されたエンジンの回転数制御装置において、特定の回転数を基準とした回転数維持制御を行うことを選択する選択手段と、この選択手段から選択信号が出力されるとその時のアクセル位置を記憶してこの記憶をその後のアクセル位置に関係なく保持し、検出されるアクセル位置が記憶された位置を含む一定範囲内にある場合には記憶された位置に対応した目標回転数と同一またはほぼ同一となるように目標回転数を設定し、且つアクセルが操作されて検出されるアクセル位置が記憶された位置を含む一定範囲の上限あるいは下限から外れた場合には上記マップに準じてアクセル位置に対応した目標回転数を設定する制御手段、とを設けている。
【0006】また、回転数維持制御の選択が解除された場合には、その時の回転数維持制御による目標回転数から上記マップに基づいたアクセル位置に対応する目標回転数に徐々に移行するようにしている。
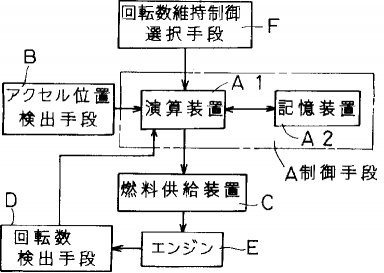
【0007】図1はこの発明の構成を示す図である。Aは演算装置A−1、記憶装置A−2等を備えた制御手段、Bはアクセル位置検出手段、Cは燃料供給装置、Dは回転数検出手段であって、これらによってエンジンEに対する電子制御式の制御装置が構成されており、これにこの発明による回転数維持制御の選択手段Fが組み込まれている。
【0008】
【作用】回転数維持制御の基準となる特定回転数はこの制御を選択した時のアクセル位置に応じて任意に選定でき、アクセルを操作していてもアクセル位置の変化が小さければ選定された特定回転数を基準として制御される。また、アクセルが大きく操作されてアクセル位置が一定の範囲を越えて変化すると回転数はアクセル操作に応じて変化するようになり、アクセル位置が一定の範囲内に戻ると再び特定回転数を基準とした制御が行われる。
【0009】また、回転数維持制御の選択が解除された場合に目標回転数をマップに基づいたアクセル位置に対応する目標回転数に徐々に移行することにより、回転数の急激な変化を伴うことなく制御の切り替えが行われる。
【0010】
【実施例】以下、図示のディーゼルエンジンにおける一実施例について述べる。
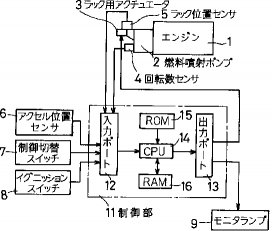
【0011】図2は全体構成を示すブロック図であり、図において、1はエンジン、2はエンジン1に付設された燃料噴射ポンプ、3はラック用アクチュエータ、4は回転数センサ、5はラック位置センサ、6はアクセル位置センサ、7は回転数維持制御の選択手段である制御切替スイッチ、8はイグニッションスイッチ、9は回転数維持制御が選択されている時に点灯するモニタランプである。
【0012】11は主要部にマイクロコンピュータが用いられている制御部であり、入力ポート12、出力ポート13、制御演算及び入出力指示を与えるCPU14、制御プログラムや制御演算に必要な諸データを記憶しているROM15、演算に使用されるRAM16等で構成されている。入力ポート12には、上記の各種のセンサやスイッチ類が接続され、また出力ポート13にはラック用アクチュエータ3やモニタランプ9が接続されている。なお、制御部11はエンジン1の制御全般に用いられるものであり、図示してない各種のセンサなどが適宜設けられる。また入力ポート12の前段には必要に応じてA/D変換器等が挿入され、出力ポート13の出力側には必要に応じてドライバー回路が挿入される。
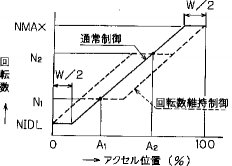
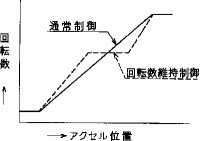
【0013】ROM15には回転数制御に用いられるマップ、すなわちアクセル位置に対応する目標回転数を定めたマップが記憶されており、図3の実線はこのマップをグラフ化して示したものである。CPU14はアクセル位置センサ6で検出されたアクセル位置に応じてマップで設定されている所定の目標回転数を得るための燃料供給量を演算し、出力ポート13から制御信号をラック用アクチュエータ3に送って燃料噴射ポンプ2の燃料ラック(図示せず)を駆動するようになっているが、このような通常の回転数制御は公知であるので詳細な説明は省略する。
【0014】回転数維持制御は制御切替スイッチ7をオンにすることによって選択され、図3の破線はこの回転数維持制御におけるアクセル位置に対する目標回転数の関係を示している。以下この制御の基本的な内容について説明する。
【0015】図3及び図4はアクセルの可動範囲におけるアクセル位置と目標回転数の関係を示した動作説明図である。図3において、A1及びA2は制御切替スイッチ7がオンされた時のアクセル位置の例であり、アクセル位置がA1の場合にはこの位置が記憶されると共にこれに対応する回転数N1が目標回転数の基準となり、またアクセル位置がA2の場合にはこの位置が記憶されると共にこれに対応する回転数N2が目標回転数の基準となって制御が行われる。
【0016】Wは不感帯幅であり、記憶されたアクセル位置A1あるいはA2を中心としたこの不感帯幅Wの範囲内では、実際のアクセル位置がA1あるいはA2でなくても図の破線のように目標回転数はN1あるいはN2に設定される。またアクセル位置がこの不感帯幅Wの範囲から外れた時には、図の破線のように目標回転数はアクセル位置に応じて変化するようになり、N1あるいはN2以外の目標回転数でエンジン1が運転されるのである。
【0017】従って、実際の運転に際してはアクセル操作によって所望の回転数が得られた時に制御切替スイッチ7をオンにすれば、アクセル位置が少々変動しても不感帯幅Wの範囲内にあればスイッチ7をオンにした時の回転数が維持されるので、所望の回転数による定速運転を継続できるのである。また制御切替スイッチ7がオンの状態でも、不感帯幅Wを越える位置までアクセルを操作すればアクセル位置に応じて回転数が変化するので、回転数維持制御を機能させたままで自由に加速や減速を行うことができ、その後アクセル位置を不感帯幅Wの範囲内に戻すことにより、再び所望の目標回転数によって運転される。
【0018】すなわち、所望の回転数による定速運転とアクセル位置に応じて回転数が変化する通常の運転とをアクセル操作だけで使い分けることが可能となるのであり、操作性が大幅に向上されると共に危険な時の減速も容易となるのである。なお、上述の説明では「定速」なる語を用いているが、実際にはアイソクロナス制御と組み合わせた制御であってもよく、また必要に応じて基準となる目標回転数を適宜変化させるようにしてもよい。
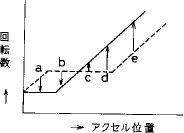
【0019】制御切替スイッチ7がオフされると上記の回転数維持制御は解除され、図3の実線による通常の回転数制御に戻るのであるが、破線と実線とでは図4のa〜eの矢印で例示したように同じアクセル位置に対する目標回転数に差がある。このため、通常の回転数制御に戻る際にはこの差を少しずつ減らして実線の目標回転数に徐々に移行するのであり、これにより、回転数の急激な変化を伴うことなくスムーズに制御の切り替えが行われる。
【0020】また、制御切替スイッチ7がオンされていてもイグニッションスイッチ8がオフされるとこの回転数維持制御の機能は解除され、制御切替スイッチ7がオンされた状態でイグニッションスイッチ8がオンされてもこの機能は作動せず、一旦制御切替スイッチ7をオフして再度オンすることで回転数維持制御が開始されるようにして、安全性を高めると共に使いやすさを向上してある。
【0021】次に、図5〜図9に示すフローチャートにより上記のような制御手順の一例を説明する。まずステップS1でアクセル位置センサ6の検出信号ACCELPが入力され、その時のアクセル位置に応じたアクセル設定回転数NACLBFが算出される。次のステップS2では制御切替スイッチ7がオフからオンに切り替えられたか否かが確認され、切り替えられた時にはステップS1で算出されたアクセル設定回転数NACLBFをメモリ回転数NMEMBFとして記憶し、回転数維持制御フラグがセットされ、不感帯域表示ランプ(図2には図示せず)を点灯する。なお、アクセル設定回転数NACLBFがアイドル回転数NIDL未満の場合にはアイドル回転数NIDLをアクセル設定回転数NACLBFとし、アクセル設定回転数NACLBFが最高回転数NMAXを越えている場合には最高回転数NMAXをアクセル設定回転数NACLBFとする。
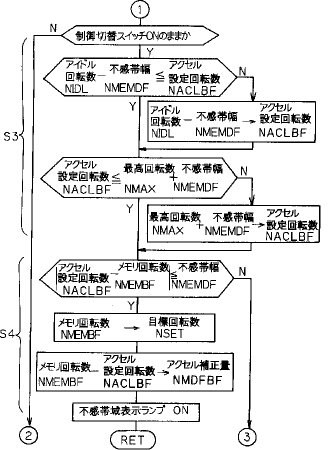
【0022】制御切替スイッチ7がオンのままの場合、すなわち既にスイッチがオンされていて回転数維持制御が継続されている場合には、ステップS3でアクセル設定回転数NACLBFの上限値と下限値が制限され、次のステップS4でアクセル位置が不感帯幅の範囲内にある時の処理が行われる。すなわち、アクセル設定回転数NACLBFとメモリ回転数NMEMBFの差が不感帯幅NMEMDF以下であれば、メモリ回転数NMEMBFを目標回転数NSETとしてこれに基づいた制御信号がラック用アクチュエータ3に出力され、燃料噴射ポンプ2の燃料ラックが駆動されてエンジン1が運転される。この時、不感帯域表示ランプはオンである。
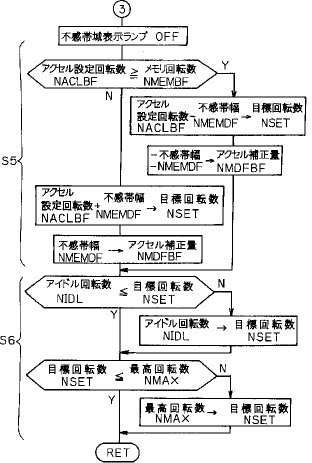
【0023】アクセル位置が不感帯幅の範囲外にある時にはステップS4は素通りし、不感帯域表示ランプをオフしてステップS5に進み、アクセル設定回転数NACLBFがメモリ回転数NMEMBF以上であれば不感帯幅NMEMDFを差し引いて、またメモリ回転数未満であれば不感帯幅をプラスしてそれぞれ目標回転数NSETが設定され、図3において実線に平行に示した破線に沿った制御が行われる。なお、ステップS6は不感帯幅の範囲外での制御の際に目標回転数NSETをアイドル回転数NIDLと最高回転数NMAXの間に制限する手順である。
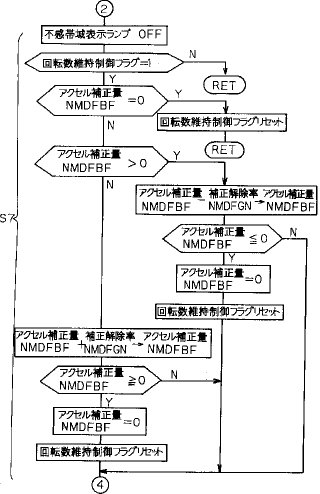
【0024】ステップS7は制御切替スイッチ7がオフからオンに切り替えられず、またオンのままでもない場合の手順である。この場合には不感帯域表示ランプはオフであり、回転数維持制御フラグが1でなければ制御切替スイッチ7がオフのままの場合であるから何も処理は行われない。一方、回転数維持制御フラグが1であれば、制御切替スイッチ7がオンからオフに切り替えられて通常制御に戻る場合であるから、図3の破線の目標回転数から実線の目標回転数まで徐々に移行するための処理が行われる。
【0025】ここで、アクセル補正量NMDFBFとは上記の各ステップで算出しておいた値であり、図3あるいは図4R>4の破線と実線の縦軸方向の差に対応している。そこで、このアクセル補正量が0であれば、差はないので直ちに回転数維持制御フラグをリセットして処理を終了するが、差がある場合にはその正負に応じて補正解除率NMDFGNを差し引き、あるいはプラスして今回のアクセル補正量NMDFBFとし、これをアクセル設定回転数NACLBFに加えて目標回転数NSETとする。従って、このステップが繰り返されることにより補正解除率NMDFGNに応じた速さで通常の回転数制御に徐々に戻るのであり、回転数の急激な変化を伴うことなくスムーズに制御の切り替えが行われる。
【0026】ステップS8は、通常の回転数制御に戻った時に目標回転数NSETをアイドル回転数NIDLと最高回転数NMAXの間に制限する手順である。
【0027】以上の例では、不感帯幅の範囲外では通常制御と同じマップを利用しており、図3の破線が不感帯幅Wの範囲外で実線に平行になるような制御となっている。従って、制御手順のプログラムの作成が比較的容易である反面、アクセルの可動範囲の両端に図に示すように不感帯幅Wの1/2の幅で遊びを持たせる必要があり、アクセルレスポンスが悪くなるという問題点がある。図10はこの問題を解決した実施例であり、不感帯幅の範囲外での破線の傾斜を大きくして始点と終点を実線と一致させ、図3のような遊びを不要としてあるので、良好なアクセルレスポンスが得られる。この傾斜の変更は、例えば回転数維持制御用として別に用意された第2のマップを用いることによって実施できるが、上述の実施例と比較して制御手順のプログラムは複雑になる。
【0028】
【発明の効果】以上の説明から明らかなように、この発明は、アクセル位置に対応する目標回転数を定めたマップを用い、検出されたアクセル位置に応じてエンジンへの燃料供給量を制御するという通常の回転数制御を行うように構成された回転数制御装置に、特定の回転数を基準とした回転数維持制御を行う機能を付加したものであり、回転数維持制御を開始した時のアクセル位置を含む一定範囲内にアクセル位置がある場合には、この制御を開始した時のアクセル位置に対応した目標回転数で運転され、またアクセル位置が上記の一定範囲から外れた場合にはアクセル位置に対応した目標回転数で運転されるようにしたものである。
【0029】従って、アクセルを操作している状態のままで任意に選定した所望の回転数を維持して運転することが可能となり、しかもアクセルを大きく操作すれば、回転数維持制御が選択されている状態でも回転数をアクセル操作に応じて変化させることができる。このため、一定のエンジン回転数を保って運転するような使い方が容易にできると共に、必要に応じて回転数を変えて危険な事態に素早く対応するなどの操作を行うことが容易となって操作性が向上するのであり、使いやすく、しかも安全性の高い装置を得ることが可能となる。
【0030】また、回転数維持制御が解除されて通常の回転数制御に戻る際に、目標回転数を回転数維持制御の回転数から通常の回転数に徐々に移行するようにしたものでは、回転数の急激な変化を伴うことがない。従って、使用者が大きなショックを感じたり、エンジンに無理がかかるなどの不具合がなく、スムーズに制御の切り替えを行うことができる。
【図面の簡単な説明】
【図1】この発明の構成を示す図である。
【図2】この発明の一実施例の全体構成を示すブロック図である。
【図3】同実施例のアクセル位置と目標回転数の関係を示した動作説明図である。
【図4】同じくアクセル位置と目標回転数の関係を示した動作説明図である。
【図5】同実施例の制御手順を示すフローチャートである。
【図6】同じく制御手順を示すフローチャートである。
【図7】同じく制御手順を示すフローチャートである。
【図8】同じく制御手順を示すフローチャートである。
【図9】同じく制御手順を示すフローチャートである。
【図10】他の実施例のアクセル位置と目標回転数の関係を例示した図である。
【符号の説明】
1 エンジン
2 燃料噴射ポンプ
4 回転数センサ
6 アクセル位置センサ
7 制御切替スイッチ
11 制御部
14 CPU
15 ROM
【0001】
【産業上の利用分野】この発明は、アクセル位置に対応してエンジン回転数を制御する電子制御式の回転数制御装置において、所望の回転数を維持して運転できるようにした装置の改良に関するものである。
【0002】
【従来の技術】トラクタ等の農作業用の作業機では、ある作業をしながら圃場内を端から端まで一定のエンジン回転数を保って直進した後Uターンし、また同じ作業を行うという作業パターンが多い。このため、少なくとも2種類の所望の回転数を記憶できるようにし、ボタン操作で回転数を切り替えできるようにした制御装置が提案されている(例えば特開平1−195933号公報参照)。
【0003】しかしながら、上記のような従来技術では作業時にボタン操作とアクセル操作の両方を行う必要があり、操作が煩雑である。またエンジン回転数を下げるためには、ボタン操作で設定回転数を低い方に切り替えるか、回転数を自動的に維持する制御を解除した上でアクセル操作量を減らすかアクセル操作を中止するかしないと回転数を下げることができず、危険な時などに素早く対応しにくいという問題もある。
【0004】
【発明が解決しようとする課題】この発明は上記のような問題点に着目し、アクセルを操作している状態で所望の回転数を維持でき、しかも一定範囲を越えてアクセルを操作すると自動的にアクセル位置に対応した回転数で運転できるようにすることを課題としてなされたものである。
【0005】
【課題を解決するための手段】上記の課題を達成するために、この発明では、検出されたアクセル位置に応じて、アクセル位置に対応する目標回転数を定めたマップによる所定の目標回転数を得るべくエンジンへの燃料供給量を制御するように構成されたエンジンの回転数制御装置において、特定の回転数を基準とした回転数維持制御を行うことを選択する選択手段と、この選択手段から選択信号が出力されるとその時のアクセル位置を記憶してこの記憶をその後のアクセル位置に関係なく保持し、検出されるアクセル位置が記憶された位置を含む一定範囲内にある場合には記憶された位置に対応した目標回転数と同一またはほぼ同一となるように目標回転数を設定し、且つアクセルが操作されて検出されるアクセル位置が記憶された位置を含む一定範囲の上限あるいは下限から外れた場合には上記マップに準じてアクセル位置に対応した目標回転数を設定する制御手段、とを設けている。
【0006】また、回転数維持制御の選択が解除された場合には、その時の回転数維持制御による目標回転数から上記マップに基づいたアクセル位置に対応する目標回転数に徐々に移行するようにしている。
【0007】図1はこの発明の構成を示す図である。Aは演算装置A−1、記憶装置A−2等を備えた制御手段、Bはアクセル位置検出手段、Cは燃料供給装置、Dは回転数検出手段であって、これらによってエンジンEに対する電子制御式の制御装置が構成されており、これにこの発明による回転数維持制御の選択手段Fが組み込まれている。
【0008】
【作用】回転数維持制御の基準となる特定回転数はこの制御を選択した時のアクセル位置に応じて任意に選定でき、アクセルを操作していてもアクセル位置の変化が小さければ選定された特定回転数を基準として制御される。また、アクセルが大きく操作されてアクセル位置が一定の範囲を越えて変化すると回転数はアクセル操作に応じて変化するようになり、アクセル位置が一定の範囲内に戻ると再び特定回転数を基準とした制御が行われる。
【0009】また、回転数維持制御の選択が解除された場合に目標回転数をマップに基づいたアクセル位置に対応する目標回転数に徐々に移行することにより、回転数の急激な変化を伴うことなく制御の切り替えが行われる。
【0010】
【実施例】以下、図示のディーゼルエンジンにおける一実施例について述べる。
【0011】図2は全体構成を示すブロック図であり、図において、1はエンジン、2はエンジン1に付設された燃料噴射ポンプ、3はラック用アクチュエータ、4は回転数センサ、5はラック位置センサ、6はアクセル位置センサ、7は回転数維持制御の選択手段である制御切替スイッチ、8はイグニッションスイッチ、9は回転数維持制御が選択されている時に点灯するモニタランプである。
【0012】11は主要部にマイクロコンピュータが用いられている制御部であり、入力ポート12、出力ポート13、制御演算及び入出力指示を与えるCPU14、制御プログラムや制御演算に必要な諸データを記憶しているROM15、演算に使用されるRAM16等で構成されている。入力ポート12には、上記の各種のセンサやスイッチ類が接続され、また出力ポート13にはラック用アクチュエータ3やモニタランプ9が接続されている。なお、制御部11はエンジン1の制御全般に用いられるものであり、図示してない各種のセンサなどが適宜設けられる。また入力ポート12の前段には必要に応じてA/D変換器等が挿入され、出力ポート13の出力側には必要に応じてドライバー回路が挿入される。
【0013】ROM15には回転数制御に用いられるマップ、すなわちアクセル位置に対応する目標回転数を定めたマップが記憶されており、図3の実線はこのマップをグラフ化して示したものである。CPU14はアクセル位置センサ6で検出されたアクセル位置に応じてマップで設定されている所定の目標回転数を得るための燃料供給量を演算し、出力ポート13から制御信号をラック用アクチュエータ3に送って燃料噴射ポンプ2の燃料ラック(図示せず)を駆動するようになっているが、このような通常の回転数制御は公知であるので詳細な説明は省略する。
【0014】回転数維持制御は制御切替スイッチ7をオンにすることによって選択され、図3の破線はこの回転数維持制御におけるアクセル位置に対する目標回転数の関係を示している。以下この制御の基本的な内容について説明する。
【0015】図3及び図4はアクセルの可動範囲におけるアクセル位置と目標回転数の関係を示した動作説明図である。図3において、A1及びA2は制御切替スイッチ7がオンされた時のアクセル位置の例であり、アクセル位置がA1の場合にはこの位置が記憶されると共にこれに対応する回転数N1が目標回転数の基準となり、またアクセル位置がA2の場合にはこの位置が記憶されると共にこれに対応する回転数N2が目標回転数の基準となって制御が行われる。
【0016】Wは不感帯幅であり、記憶されたアクセル位置A1あるいはA2を中心としたこの不感帯幅Wの範囲内では、実際のアクセル位置がA1あるいはA2でなくても図の破線のように目標回転数はN1あるいはN2に設定される。またアクセル位置がこの不感帯幅Wの範囲から外れた時には、図の破線のように目標回転数はアクセル位置に応じて変化するようになり、N1あるいはN2以外の目標回転数でエンジン1が運転されるのである。
【0017】従って、実際の運転に際してはアクセル操作によって所望の回転数が得られた時に制御切替スイッチ7をオンにすれば、アクセル位置が少々変動しても不感帯幅Wの範囲内にあればスイッチ7をオンにした時の回転数が維持されるので、所望の回転数による定速運転を継続できるのである。また制御切替スイッチ7がオンの状態でも、不感帯幅Wを越える位置までアクセルを操作すればアクセル位置に応じて回転数が変化するので、回転数維持制御を機能させたままで自由に加速や減速を行うことができ、その後アクセル位置を不感帯幅Wの範囲内に戻すことにより、再び所望の目標回転数によって運転される。
【0018】すなわち、所望の回転数による定速運転とアクセル位置に応じて回転数が変化する通常の運転とをアクセル操作だけで使い分けることが可能となるのであり、操作性が大幅に向上されると共に危険な時の減速も容易となるのである。なお、上述の説明では「定速」なる語を用いているが、実際にはアイソクロナス制御と組み合わせた制御であってもよく、また必要に応じて基準となる目標回転数を適宜変化させるようにしてもよい。
【0019】制御切替スイッチ7がオフされると上記の回転数維持制御は解除され、図3の実線による通常の回転数制御に戻るのであるが、破線と実線とでは図4のa〜eの矢印で例示したように同じアクセル位置に対する目標回転数に差がある。このため、通常の回転数制御に戻る際にはこの差を少しずつ減らして実線の目標回転数に徐々に移行するのであり、これにより、回転数の急激な変化を伴うことなくスムーズに制御の切り替えが行われる。
【0020】また、制御切替スイッチ7がオンされていてもイグニッションスイッチ8がオフされるとこの回転数維持制御の機能は解除され、制御切替スイッチ7がオンされた状態でイグニッションスイッチ8がオンされてもこの機能は作動せず、一旦制御切替スイッチ7をオフして再度オンすることで回転数維持制御が開始されるようにして、安全性を高めると共に使いやすさを向上してある。
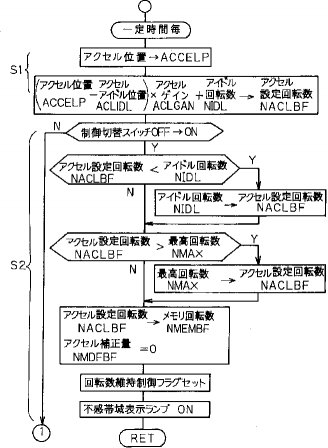
【0021】次に、図5〜図9に示すフローチャートにより上記のような制御手順の一例を説明する。まずステップS1でアクセル位置センサ6の検出信号ACCELPが入力され、その時のアクセル位置に応じたアクセル設定回転数NACLBFが算出される。次のステップS2では制御切替スイッチ7がオフからオンに切り替えられたか否かが確認され、切り替えられた時にはステップS1で算出されたアクセル設定回転数NACLBFをメモリ回転数NMEMBFとして記憶し、回転数維持制御フラグがセットされ、不感帯域表示ランプ(図2には図示せず)を点灯する。なお、アクセル設定回転数NACLBFがアイドル回転数NIDL未満の場合にはアイドル回転数NIDLをアクセル設定回転数NACLBFとし、アクセル設定回転数NACLBFが最高回転数NMAXを越えている場合には最高回転数NMAXをアクセル設定回転数NACLBFとする。
【0022】制御切替スイッチ7がオンのままの場合、すなわち既にスイッチがオンされていて回転数維持制御が継続されている場合には、ステップS3でアクセル設定回転数NACLBFの上限値と下限値が制限され、次のステップS4でアクセル位置が不感帯幅の範囲内にある時の処理が行われる。すなわち、アクセル設定回転数NACLBFとメモリ回転数NMEMBFの差が不感帯幅NMEMDF以下であれば、メモリ回転数NMEMBFを目標回転数NSETとしてこれに基づいた制御信号がラック用アクチュエータ3に出力され、燃料噴射ポンプ2の燃料ラックが駆動されてエンジン1が運転される。この時、不感帯域表示ランプはオンである。
【0023】アクセル位置が不感帯幅の範囲外にある時にはステップS4は素通りし、不感帯域表示ランプをオフしてステップS5に進み、アクセル設定回転数NACLBFがメモリ回転数NMEMBF以上であれば不感帯幅NMEMDFを差し引いて、またメモリ回転数未満であれば不感帯幅をプラスしてそれぞれ目標回転数NSETが設定され、図3において実線に平行に示した破線に沿った制御が行われる。なお、ステップS6は不感帯幅の範囲外での制御の際に目標回転数NSETをアイドル回転数NIDLと最高回転数NMAXの間に制限する手順である。
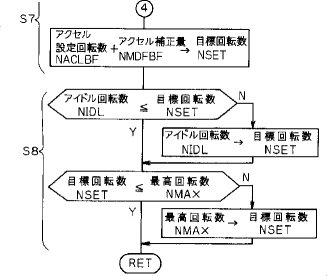
【0024】ステップS7は制御切替スイッチ7がオフからオンに切り替えられず、またオンのままでもない場合の手順である。この場合には不感帯域表示ランプはオフであり、回転数維持制御フラグが1でなければ制御切替スイッチ7がオフのままの場合であるから何も処理は行われない。一方、回転数維持制御フラグが1であれば、制御切替スイッチ7がオンからオフに切り替えられて通常制御に戻る場合であるから、図3の破線の目標回転数から実線の目標回転数まで徐々に移行するための処理が行われる。
【0025】ここで、アクセル補正量NMDFBFとは上記の各ステップで算出しておいた値であり、図3あるいは図4R>4の破線と実線の縦軸方向の差に対応している。そこで、このアクセル補正量が0であれば、差はないので直ちに回転数維持制御フラグをリセットして処理を終了するが、差がある場合にはその正負に応じて補正解除率NMDFGNを差し引き、あるいはプラスして今回のアクセル補正量NMDFBFとし、これをアクセル設定回転数NACLBFに加えて目標回転数NSETとする。従って、このステップが繰り返されることにより補正解除率NMDFGNに応じた速さで通常の回転数制御に徐々に戻るのであり、回転数の急激な変化を伴うことなくスムーズに制御の切り替えが行われる。
【0026】ステップS8は、通常の回転数制御に戻った時に目標回転数NSETをアイドル回転数NIDLと最高回転数NMAXの間に制限する手順である。
【0027】以上の例では、不感帯幅の範囲外では通常制御と同じマップを利用しており、図3の破線が不感帯幅Wの範囲外で実線に平行になるような制御となっている。従って、制御手順のプログラムの作成が比較的容易である反面、アクセルの可動範囲の両端に図に示すように不感帯幅Wの1/2の幅で遊びを持たせる必要があり、アクセルレスポンスが悪くなるという問題点がある。図10はこの問題を解決した実施例であり、不感帯幅の範囲外での破線の傾斜を大きくして始点と終点を実線と一致させ、図3のような遊びを不要としてあるので、良好なアクセルレスポンスが得られる。この傾斜の変更は、例えば回転数維持制御用として別に用意された第2のマップを用いることによって実施できるが、上述の実施例と比較して制御手順のプログラムは複雑になる。
【0028】
【発明の効果】以上の説明から明らかなように、この発明は、アクセル位置に対応する目標回転数を定めたマップを用い、検出されたアクセル位置に応じてエンジンへの燃料供給量を制御するという通常の回転数制御を行うように構成された回転数制御装置に、特定の回転数を基準とした回転数維持制御を行う機能を付加したものであり、回転数維持制御を開始した時のアクセル位置を含む一定範囲内にアクセル位置がある場合には、この制御を開始した時のアクセル位置に対応した目標回転数で運転され、またアクセル位置が上記の一定範囲から外れた場合にはアクセル位置に対応した目標回転数で運転されるようにしたものである。
【0029】従って、アクセルを操作している状態のままで任意に選定した所望の回転数を維持して運転することが可能となり、しかもアクセルを大きく操作すれば、回転数維持制御が選択されている状態でも回転数をアクセル操作に応じて変化させることができる。このため、一定のエンジン回転数を保って運転するような使い方が容易にできると共に、必要に応じて回転数を変えて危険な事態に素早く対応するなどの操作を行うことが容易となって操作性が向上するのであり、使いやすく、しかも安全性の高い装置を得ることが可能となる。
【0030】また、回転数維持制御が解除されて通常の回転数制御に戻る際に、目標回転数を回転数維持制御の回転数から通常の回転数に徐々に移行するようにしたものでは、回転数の急激な変化を伴うことがない。従って、使用者が大きなショックを感じたり、エンジンに無理がかかるなどの不具合がなく、スムーズに制御の切り替えを行うことができる。
【図面の簡単な説明】
【図1】この発明の構成を示す図である。
【図2】この発明の一実施例の全体構成を示すブロック図である。
【図3】同実施例のアクセル位置と目標回転数の関係を示した動作説明図である。
【図4】同じくアクセル位置と目標回転数の関係を示した動作説明図である。
【図5】同実施例の制御手順を示すフローチャートである。
【図6】同じく制御手順を示すフローチャートである。
【図7】同じく制御手順を示すフローチャートである。
【図8】同じく制御手順を示すフローチャートである。
【図9】同じく制御手順を示すフローチャートである。
【図10】他の実施例のアクセル位置と目標回転数の関係を例示した図である。
【符号の説明】
1 エンジン
2 燃料噴射ポンプ
4 回転数センサ
6 アクセル位置センサ
7 制御切替スイッチ
11 制御部
14 CPU
15 ROM
【特許請求の範囲】
【請求項1】 検出されたアクセル位置に応じて、アクセル位置に対応する目標回転数を定めたマップによる所定の目標回転数を得るべくエンジンへの燃料供給量を制御するように構成されたエンジンの回転数制御装置において、特定の回転数を基準とした回転数維持制御を行うことを選択する選択手段と、この選択手段から選択信号が出力されるとその時のアクセル位置を記憶してこの記憶をその後のアクセル位置に関係なく保持し、検出されるアクセル位置が記憶された位置を含む一定範囲内にある場合には記憶された位置に対応した目標回転数と同一またはほぼ同一となるように目標回転数を設定し、且つアクセルが操作されて検出されるアクセル位置が記憶された位置を含む一定範囲の上限あるいは下限から外れた場合には上記マップに準じてアクセル位置に対応した目標回転数を設定する制御手段、とを備えていることを特徴とするエンジンの回転数制御装置。
【請求項2】 回転数維持制御の選択が解除された場合には、その時の回転数維持制御による目標回転数から上記マップに基づいたアクセル位置に対応する目標回転数に徐々に移行するようにした請求項1記載のエンジンの回転数制御装置。
【請求項1】 検出されたアクセル位置に応じて、アクセル位置に対応する目標回転数を定めたマップによる所定の目標回転数を得るべくエンジンへの燃料供給量を制御するように構成されたエンジンの回転数制御装置において、特定の回転数を基準とした回転数維持制御を行うことを選択する選択手段と、この選択手段から選択信号が出力されるとその時のアクセル位置を記憶してこの記憶をその後のアクセル位置に関係なく保持し、検出されるアクセル位置が記憶された位置を含む一定範囲内にある場合には記憶された位置に対応した目標回転数と同一またはほぼ同一となるように目標回転数を設定し、且つアクセルが操作されて検出されるアクセル位置が記憶された位置を含む一定範囲の上限あるいは下限から外れた場合には上記マップに準じてアクセル位置に対応した目標回転数を設定する制御手段、とを備えていることを特徴とするエンジンの回転数制御装置。
【請求項2】 回転数維持制御の選択が解除された場合には、その時の回転数維持制御による目標回転数から上記マップに基づいたアクセル位置に対応する目標回転数に徐々に移行するようにした請求項1記載のエンジンの回転数制御装置。
【図1】


【図2】
【図3】
【図4】
【図10】
【図9】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図10】
【図9】
【図5】
【図6】
【図7】
【図8】
【特許番号】特許第3161859号(P3161859)
【登録日】平成13年2月23日(2001.2.23)
【発行日】平成13年4月25日(2001.4.25)
【国際特許分類】
【出願番号】特願平5−50080
【出願日】平成5年2月15日(1993.2.15)
【公開番号】特開平6−241084
【公開日】平成6年8月30日(1994.8.30)
【審査請求日】平成11年2月15日(1999.2.15)
【出願人】(000006781)ヤンマーディーゼル株式会社 (3,810)
【参考文献】
【文献】特開 平1−195933(JP,A)
【文献】特開 昭63−219839(JP,A)
【文献】特開 平3−70634(JP,A)
【文献】実開 昭63−168240(JP,U)
【文献】実開 昭60−165225(JP,U)
【登録日】平成13年2月23日(2001.2.23)
【発行日】平成13年4月25日(2001.4.25)
【国際特許分類】
【出願日】平成5年2月15日(1993.2.15)
【公開番号】特開平6−241084
【公開日】平成6年8月30日(1994.8.30)
【審査請求日】平成11年2月15日(1999.2.15)
【出願人】(000006781)ヤンマーディーゼル株式会社 (3,810)
【参考文献】
【文献】特開 平1−195933(JP,A)
【文献】特開 昭63−219839(JP,A)
【文献】特開 平3−70634(JP,A)
【文献】実開 昭63−168240(JP,U)
【文献】実開 昭60−165225(JP,U)
[ Back to top ]