
エンジントルク制御装置
【課題】低地ストール発進と同等のエンジントルクを空気密度の低い高地ストール発進においても得られるようにする。
【解決手段】高地ストール発進条件を判定し(S2)、高地ストール発進と判定された場合、高地ストール発進時目標エンジン回転数STLEGをトルクコンバータ2のストールトルク比と自動変速機3内の油温とに基づいて設定し(S6)、目標エンジン回転数STLEGとエンジン回転数Neとの差分に応じたプレエンジントルク上限加算値TRQNEUPを設定し(S7,S9〜S12)、高地ストール発進時目標エンジン回転数STLEGに基づいてプレエンジントルク上限値PRETRQLIMを設定し(S13)、この上限値PRETRQLIMにプレエンジントルク上限加算値TRQNEUPを加算して、エンジントルク上限値TRQLIMを設定し(S15,S18)、このエンジントルク上限値TRQLIMを目標エンジントルクとしてエンジン1を制御する。
【解決手段】高地ストール発進条件を判定し(S2)、高地ストール発進と判定された場合、高地ストール発進時目標エンジン回転数STLEGをトルクコンバータ2のストールトルク比と自動変速機3内の油温とに基づいて設定し(S6)、目標エンジン回転数STLEGとエンジン回転数Neとの差分に応じたプレエンジントルク上限加算値TRQNEUPを設定し(S7,S9〜S12)、高地ストール発進時目標エンジン回転数STLEGに基づいてプレエンジントルク上限値PRETRQLIMを設定し(S13)、この上限値PRETRQLIMにプレエンジントルク上限加算値TRQNEUPを加算して、エンジントルク上限値TRQLIMを設定し(S15,S18)、このエンジントルク上限値TRQLIMを目標エンジントルクとしてエンジン1を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ストール発進に際し、空気密度の低い高地であっても低地と同等のエンジントルクを得ることができるようにしたエンジントルク制御装置に関する。
【背景技術】
【0002】
従来、エンジンからの出力を、トルクコンバータを介して自動変速機に伝達する車両では、車両が発進する際に、運転者がアクセルペダルを踏み込んでエンジン回転数を上昇させると、その出力がトルクコンバータによりトルク増幅されて自動変速機に伝達される。
【0003】
従って、急登坂路での発進、縁石など段差を乗り越えるとき、或いは積載重量が大きい車両の発進に際しては、運転者がアクセルペダルを踏み込むことで、トルクコンバータでトルク増幅された駆動力が自動変速機に伝達されるため、車両を発進(ストール発進)させることが可能となる。尚、本出願では、通常のアクセルペダルの踏込みでは発進させることができないため、運転者がアクセルペダルを大きく踏み込んで、エンジン回転数を高回転にさせて発進させることをストール発進と称する。
【0004】
しかし、過大なトルク増幅は自動変速機に多大な負荷を掛けることになる。そのため、エンジンを制御するエンジン制御装置(ECU)では、ストール発進に際し、エンジンの出力トルクを、予め決められたトルクコンバータのストールトルク比(入力側トルクと出力側トルクとの比が最大になる発進時のトルク比)を越えないように制御している。
【0005】
すなわち、ECUでは、自動変速機の変速を制御する変速制御装置(TCU)において求めたストールトルク比に基づき、許容されるエンジントルク上限値を目標エンジントルクとして設定し、発進時のエンジントルクを制御する。これにより、ストール発進時において自動変速機にかかる負荷が小さくなり、発進性と変速機の保護との方向を満足させることができる。
【0006】
このようなストール発進時の制御として、特許文献1(特開平9−296741号公報)には、ストール発進時のエンジン回転数がストール状態発生と見做すための下限回転数(ストール回転数)を越えている場合、エンジン回転数をストール回転数以下とするための目標駆動トルクを設定し、エンジンの出力トルクが目標駆動トルクとなるようにスロットル弁開度を制御することで、自動変速機を過大な入力トルクから保護するようにした技術が開示されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平9−296741号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、高地は低地に比し空気密度が低いため、同一のスロットル開度では高地での出力トルクが相対的に低くなる。従って、ストール発進と見なされてエンジンの出力トルクが制限されると、低地では可能であったストール発進が、高地ではトルク不足により発進不良となる場合がある。
【0009】
この対策として、エンジントルク上限値を高めに設定することも考えられるが、低地におけるストール発進では、相対的にトルク過多となり自動変速機の耐久性が損なわれることになる。
【0010】
更に、高地走行では、運転者が車両を発進させようとする意思表示であるアクセルペダルの踏込みに反して、エンジンの出力トルクが制限されるため、運転者に違和感を与えてしまう不都合がある。
【0011】
本発明は、上記事情に鑑み、低地ストール発進と同等のエンジントルクを高地ストール発進においても得られるようにして、良好な発進性能を得ることができると共に、過大な入力トルクから、トルクコンバータ、自動変速機等の駆動系を保護することのできるエンジントルク制御装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明によるエンジントルク制御装置は、車速を検出する車速検出手段と、アクセル開度を検出するアクセル開度検出手段と、エンジン回転数を検出するエンジン回転数検出手段と、少なくとも前記アクセル開度検出手段で検出したアクセル開度及び前記エンジン回転数検出手段で検出したエンジン回転数が、低地の走行環境で設定されているストール発進上限値に達しても、前記車速検出手段で検出した車速が予め設定されている停止判定車速を越えていない場合、高地ストール発進と判定するストール発進判定手段と、前記ストール発進判定手段で高地ストール発進と判定された場合、高地ストール発進時の目標エンジントルクを出力することの可能な目標エンジン回転数を設定する高地ストール発進時目標エンジン回転数設定手段と、前記高地ストール発進時目標エンジン回転数設定手段で設定した目標エンジン回転数と前記エンジン回転数検出手段で検出したエンジン回転数との差分に応じてプレエンジントルク上限加算値を設定するプレエンジントルク上限加算値設定手段と、前記高地ストール発進時目標エンジン回転数設定手段で設定した高地ストール発進時目標エンジン回転数に基づいてプレエンジントルク上限値を設定する高地ストール発進時プレエンジントルク上限値設定手段と、上記高地ストール発進時プレエンジントルク上限値設定手段で設定したプレエンジントルク上限値に前記プレエンジントルク上限加算値設定手段で設定したプレエンジントルク上限加算値を加算してエンジントルク上限値を設定するエンジントルク上限値設定手段と、前記エンジントルク上限値設定手段で設定したエンジントルク上限値を目標エンジントルクとして設定してエンジンの出力トルクを制御する出力トルク制御手段とを備える。
【発明の効果】
【0013】
本発明によれば、高地でのストール発進に際し、低地でのストール発進と同等のエンジンの出力トルクが得られるまでエンジン回転数を上昇させて、低地ストール発進時と同等のエンジントルクを高地ストール発進時においても得られるようにしたので、高地ストール発進に際し、良好な発進性能を得ることができると共に、過大な入力トルクから、トルクコンバータ、自動変速機等の駆動系を保護することができる。
【図面の簡単な説明】
【0014】
【図1】パワートレインの制御系を示す概略構成図
【図2】高地ストール発進制御ルーチンを示すフローチャート(その1)
【図3】高地ストール発進制御ルーチンを示すフローチャート(その2)
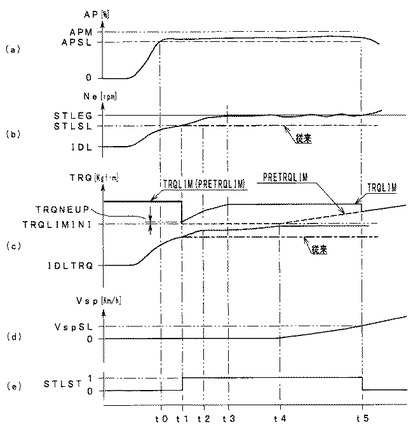
【図4】高地ストール発進制御のタイムチャートを示し、(a)はアクセル開度の変化を示すタイムチャート、(b)はエンジン回転数の変化を示すタイムチャート、(c)はエンジンの出力トルクとトルク上限値の変化を示すタイムチャート、(d)は車速の変化を示すタイムチャート、(e)はストール発進判定フラグの変化を示すタイムチャート
【発明を実施するための形態】
【0015】
以下、図面に基づいて本発明の一実施形態を説明する。尚、本実施形態では、空気密度の低い走行環境を高地と称し、通常の空気密度(標準大気圧)を有する走行環境を低地と称する。
【0016】
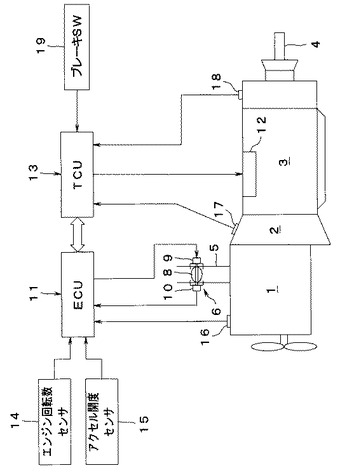
図1の符号1はエンジンで、このエンジン1の出力側に、トルクコンバータ2を介して自動変速機3が連設されている。エンジン1からの出力は、トルクコンバータ2の流体を介し、或いはロックアップクラッチが締結されたロックアップ締結状態のときは、エンジン1と自動変速機3とが直結状態となるためトルクコンバータ2の流体を介さずに、ロックアップクラッチを介して自動変速機3に伝達され、この自動変速機3で所定の変速比に変速された後、出力軸4から後輪或いは前輪等の駆動輪側へ動力が伝達される。
【0017】
又、エンジン1の吸気ポート(図示せず)に連通する吸気通路5の中途に電子制御スロットル装置(ETC)6が配設されている。このETC6はスロットル弁8を有し、このスロットル弁8の一端が、電動モータ等からなるスロットルモータ9に連結され、他端にポテンショメータ等からなるスロットル開度センサ10が連設されている。
【0018】
スロットルモータ9は、後述するエンジン制御ユニット(ECU)11からの駆動信号にて駆動されてスロットル弁8が所定に開弁される。このスロットル弁8のスロットル開度TV[%]は、スロットル開度センサ10で検出されてECU11へ出力される。
【0019】
又、自動変速機3には遊星歯車等で構成された変速機構が内装されていると共に、この変速機構を適宜駆動させるクラッチやブレーキ等から成る摩擦締結要素、及びトルクコンバータ2に設けられているロックアップクラッチを、選択的に開放或いは締結動作させるコントロールバルブユニット12が併設されている。このコントロールバルブユニット12に対する駆動信号は、後述する変速制御装置(TCU)13から出力される。
【0020】
ECU11、及びTCU13は、CPU、ROM、RAM等を備えたマイクロコンピュータを主体に構成されており、両ユニット11,13はバスラインを介して双方向通信自在に接続されている。又、ECU11の入力側には、上述したスロットル開度センサ10以外に、エンジン回転数Ne[rpm]を検出するエンジン回転数検出手段としてのエンジン回転数センサ14、アクセルペダル(図示せず)の踏込み量であるアクセル開度AP[%]を検出するアクセル開度検出手段としてのアクセル開度センサ15、エンジン温度の代表である冷却水温Tw[℃]を検出する冷却水温センサ16等、エンジン運転状態を検出するセンサ類が接続されている。又、ECU11の出力側に、図示しない燃料噴射装置のインジェクタ、点火装置のイグナイタ、及びETC6に設けられているスロットルモータ9等、エンジンを制御するアクチュエータ類が接続されている。
【0021】
一方、TCU13の入力側に、トルクコンバータ2に設けられているタービン軸の回転数(タービン回転数)Ntを検出するタービン回転数センサ17、出力軸4の回転数から車速Vspを検出する車速検出手段としての車速センサ18、ブレーキペダルの踏込みでON動作するブレーキスイッチ19等、車両の運転状態を検出するセンサ類が接続されている。又、このTCU13の出力側に、コントロールバルブユニット12に設けられている各アクチュエータが接続されている。
【0022】
ECU11は、アクセル開度センサ15で検出したアクセル開度AP等に基づき目標エンジントルクを求め、実際のエンジントルク(実エンジントルク)TRQを目標エンジントルクに収束させるべくスロットル弁8の開度(スロットル開度)TVを制御する。同時に、周知の燃料制御、点火時期制御等を実行して、エンジン全体を制御する。
【0023】
一方、TCU13は、セレクトレバーがドライブ(D)レンジにセットされている場合、アクセル開度APと車速Vspとに基づき、ROM等に予め記憶されている変速パターンを参照して、変速タイミングを判定し、変速時には変速信号をコントロールバルブユニット12へ出力して変速制御を行う。同時に、トルクコンバータ2のロックアップ、スリップロックアップ等のトルクコンバータ制御を行う。
【0024】
ところで、車両をストール発進させるべくアクセルペダルを大きく踏み込むと、トルクコンバータ2のトルク増幅率が過大となり、自動変速機3に大きな負荷を掛けることになる。そのため、TCU13は、ストール発進を検出した場合、先ず、保護制御条件毎に、自動変速機3にて許容されるプレエンジントルク上限値PRETRQLIMを求め、このプレエンジントルク上限値PRETRQLIMを初期値としてエンジントルク上限値TRQLIMを求め、このエンジントルク上限値TRQLIMをECU11へ送信する。尚、保護制御条件としては、油温を下げるための高油温時制御、高地ストール発進時の空気密度の低下によるトルク不足を補償する高地ストール発進時制御、システム故障時にフェイルセーフ等を実行させるシステム故障時制御、通常走行時制御等がある。
【0025】
ECU11は、受信したエンジントルク上限値TRQLIMを目標エンジントルクとして設定し、実際のエンジントルクTRQが目標エンジントルクとなるようにスロットル弁8の開度を制御する。これにより、ストール発進時において自動変速機3に過大な負荷がかかることが防止され、発進性と自動変速機3の保護との双方が満足される。
【0026】
しかし、高地走行では、空気密度が低いため、実際のエンジントルクが目標エンジントルクに達しない場合が生じる。その結果、通常の空気密度(標準大気圧)を有する低地の走行環境では保証されているストール発進が、高地ではトルク不足により確保できなくなる。
【0027】
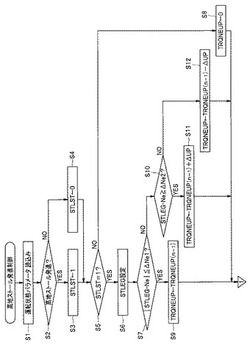
そのため、TCU13では、高地ストール発進時のプレエンジントルク上限値PRETRQLIMを、通常のストール発進時とは別に設定するようにし、高地ストール発進時のトルク不足を補償するようにしている。TCU13で実行される高地ストール発進制御は、具体的には、図2〜図3に示す高地ストール発進制御ルーチンに従って処理される。
【0028】
このルーチンは、イグニッションスイッチをONした後、設定演算周期毎に実行される。先ず、ステップS1で、車速Vsp、アクセル開度AP、エンジン回転数Ne、ブレーキスイッチ19からのON/OFF信号等の運転状態パラメータを読込み、ステップS2で、高地ストール発進判定を行う。尚、このステップでの処理が本発明のストール発進判定手段に対応している。
【0029】
ステップS2で実行される高地ストール発進判定条件は以下の通りである。
【0030】
(1)車速Vspが停止判定車速VspSL未満(Vsp<VspSL)である。
【0031】
(2)アクセル開度APが高負荷発進判定開度APSL以上(AP≦APSL)である。
【0032】
(3)エンジン回転数Neがストール発進判定回転数STLSL以上である。
【0033】
(4)TCU13で設定したプレエンジントルク上限値PRETRQLIMが、想定するエンジントルク上限値TRQLIM以下(PRETRQLIM≦TRQLIM)である。
【0034】
(5)想定するエンジントルク上限値TRQLIMが、ECU11で設定した目標エンジントルクとほぼ同一である(TRQLIM≒目標エンジントルク)。
【0035】
(6)他の保護制御(高油温時制御、システム故障制御、通常走行時制御等)が起動していない。
【0036】
(7)ブレーキスイッチがOFFである。
【0037】
尚、高負荷発進判定開度APSL、及びストール発進判定回転数STLSLは、低地等、通常の空気密度下のアクセル操作であれば、当然ストール発進が可能な上限値であり、予め実験などから求めて設定されている。
【0038】
ステップS2では、これらの条件が全て満足している場合、すなわち、低地では、アクセル開度APが高負荷発進判定開度APSLに到達する以前、或いはエンジン回転数Neがストール発進判定回転数STLSLに到達する以前に車両がストール発進する走行環境であるにも拘らず、車速Vspが停止判定車速VspSLを維持している場合は、空気密度が低く、トルク不足が発生している高地ストール発進と判定する。
【0039】
そして、高地ストール発進と判定した場合は、ステップS3へ進み、高地ストール発進判定フラグSTLSTをセットし(STLST←1)、ステップS5へ進む。一方、高地ストール発進判定条件の1つでも満足されていない場合は、通常ストール発進制御に備えるべく、ステップS4へ進み、高地ストール発進判定フラグSTLSTをクリアして(STLST←0)、ステップS5へ進む。
【0040】
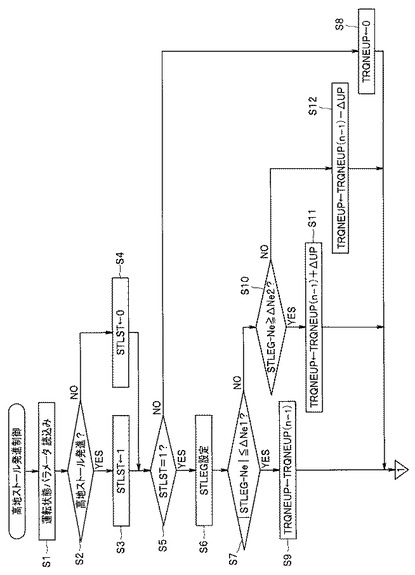
ステップS5では、高地ストール発進判定フラグSTLSTの値を参照し、ストール発進制御中か否かを調べ、STLST=1の高地ストール発進制御中のときは、ステップS6へ進む。又、STLST=0のときは、ステップS8へ分岐し、このステップS8で、プレエンジントルク上限加算値TRQNEUPをクリアして(TRQNEUP←0)、ステップS13へ進む。
【0041】
一方、ステップS5からステップS6へ進むと、高地ストール発進時目標エンジン回転数STLEGを設定する。この高地ストール発進時目標エンジン回転数STLEGは、高地ストール発進時の目標エンジントルクを出力することの可能なエンジン回転数の目標値(目標エンジン回転数)であり、トルクコンバータ2、及び自動変速機3等の駆動系が許容できる入力回転数よりも低く、しかも、その中で最も大きなエンジン回転数に設定されている。尚、本実施形態では、トルクコンバータ2のストールトルク比と自動変速機3内を潤滑するオイルの温度(油温)とに基づいて高地ストール発進時目標エンジン回転数STLEGが設定されている。尚、このステップS6での処理が、本発明の高地ストール発進時目標エンジン回転数設定手段に対応している。
【0042】
次いで、ステップS7へ進み、高地ストール発進時目標エンジン回転数STLEGとエンジン回転数Neとの差分の絶対値と微小判定値ΔNe1とを比較して、エンジン回転数Neが高地ストール発進時目標エンジン回転数STLEGにほぼ達したか否かを調べる。
【0043】
そして、両エンジン回転数STLEG,Neの差分の絶対値が微小判定値ΔNe1以内、すなわち0に近い場合は(|STLEG−Ne|≦ΔNe1)、エンジン回転数Neがアクセルペダルの踏込みで上昇し、高地ストール発進時目標エンジン回転数STLEGにほぼ達したと判定し、ステップS9へ進む。ステップS9では、前回の演算時に求めたプレエンジントルク上限加算値TRQNEUP(n-1)を、今回のプレエンジントルク上限加算値TRQNEUPとして設定して(TRQNEUP←TRQNEUP(n-1))、ステップS13へ進む。従って、この場合、プレエンジントルク上限加算値TRQNEUPは一定値を維持することになる。
【0044】
一方、|STLEG−Ne|>ΔNe1の場合は、ステップS10へ分岐し、両エンジン回転数STLEG,Neの差分と回転上昇判定値ΔNe2(但し、ΔNe1≪ΔNe2)とを比較する。
【0045】
そして、STLEG−Ne≧ΔNe2のときは、高地ストール発進時目標エンジン回転数STLEGとエンジン回転数Neの差が大きく、トルク不足であると判定し、ステップS11へ進む。又、STLEG−Ne<ΔNe2のとき、すなわち、ΔNe1<STLEG−Ne<ΔNe2のときは、エンジン回転数Neが高地ストール発進時目標エンジン回転数STLEGに近づいていると判定し、ステップS12へ分岐する。
【0046】
ステップS11へ進むと、前回の演算時に求めたプレエンジントルク上限加算値TRQNEUP(n-1)に設定増減値ΔUPを加算して、今回のプレエンジントルク上限加算値TRQNEUPを設定し(TRQNEUP←TRQNEUP(n-1)+ΔUP)、ステップS13へ進む。又、ステップS12へ進むと、前回の演算時に求めたプレエンジントルク上限加算値TRQNEUP(n-1)から設定増減値ΔUPを減算して、今回のプレエンジントルク上限加算値TRQNEUPを設定し(TRQNEUP←TRQNEUP(n-1)−ΔUP)、ステップS13へ進む。尚、上述したステップS7,S9〜S12での処理が、本発明のプレエンジントルク上限加算値設定手段に対応している。
【0047】
このプレエンジントルク上限加算値TRQNEUPは、後述するステップS15,S18で読込まれ、プレエンジントルク上限値PRETRQLIM、或いはエンジントルク上限初期値TRQLIMINIに加算されてエンジントルク上限値TRQLIMが設定される。高地ストール発進と判定された直後は、高地ストール発進時目標エンジン回転数STLEGと実際のエンジン回転数Neと開きが大きいため、エンジントルク上限値TRQLIMは、プレエンジントルク上限加算値TRQNEUPに設定増減値ΔUPを加算した大きな値となり、比較的急な勾配の傾斜で増加される。一方、実際のエンジン回転数Neが高地ストール発進時目標エンジン回転数STLEGに近づくと、エンジントルク上限値TRQLIMは、プレエンジントルク上限加算値TRQNEUPから設定増減値ΔUPを減算した小さな値となり、比較的緩い勾配の傾斜で増加される。すなわち、最初に高地ストール発進と判定されたときから、エンジントルク上限値TRQLIMは、高地ストール発進時目標エンジン回転数STLEGと実際のエンジン回転数Neとの差分に対応した勾配で上昇される。
【0048】
ステップS13へ進むと、個々の保護制御毎にプレエンジントルク上限値PRETRQLIMを算出する。プレエンジントルク上限値PRETRQLIMは保護制御条件毎に相違しており、保護制御条件としては高油温時制御、通常ストール発進時制御、高地ストール発進時制御、システム故障時制御、通常走行時制御等がある。尚、本実施形態では、高地ストール発進時プレエンジントルク上限値PRETRQLIMを、ストール発進時に車速Vspが検出された場合、この車速Vspの上昇に応じて増加するように設定されている。
【0049】
例えば、高地ストール発進判定フラグSTLSTがセットされている高地ストール発進の際には、高地ストール発進時プレエンジントルク上限値PRETRQLIMが選択される。この高地ストール発進時プレエンジントルク上限値PRETRQLIMは、上述した高地ストール発進時目標エンジン回転数STLEGに基づいて設定される。このステップS13での高地ストール発進時プレエンジントルク上限値PRETRQLIMを設定する処理が、本発明の高地ストール発進時プレエンジントルク上限値設定手段に対応している。
【0050】
尚、高地ストール発進以外の保護制御条件が実行されている場合は、前述したステップS2の高地ストール発進判定条件の「(6)他の保護制御が起動していない」の項目が満足されないため、高地ストール発進制御は実行されず、従って、高地ストール発進制御と他の保護制御とが干渉することはない。
【0051】
又、上述したように、高地ストール発進時プレエンジントルク上限値PRETRQLIMは、車両の車速Vspが検出され始めると、当該車速Vspの上昇に伴って増加するように設定される。従って、高地ストール発進時プレエンジントルク上限値PRETRQLIMが、ECU11で設定されるエンジントルク上限値TRQLIMを上回る場合がある。この場合は、上述したステップS2の高地ストール発進判定条件の(4)項が満足されなくなるため、高地ストール発進制御は解除される。その結果、高地ストール発進制御が解除されて通常走行制御へ移行する際の走行制御の切り替りが円滑化される。
【0052】
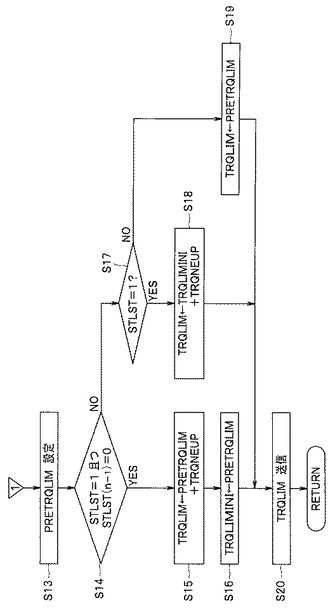
その後、ステップS14へ進み、今回の高地ストール発進判定フラグSTLSTの値と前回の演算時に求めた高地ストール発進判定フラグSTLST(n-1)の値とを調べ、STLST=1、且つSTLST(n-1)=0の場合、すなわち、高地ストール発進と判定されて最初のルーチンのときはステップS15へ進み、それ以外の態様ではステップS17へ分岐する。
【0053】
ステップS15へ進むと、プレエンジントルク上限値PRETRQLIMにプレエンジントルク上限加算値TRQNEUPを加算してエンジントルク上限値TRQLIMを求めて(TRQLIM←PRETRQLIM+TRQNEUP)、ステップS16へ進む。ステップS16では、エンジントルク上限初期値TRQLIMINIを、今回求めたプレエンジントルク上限値PRETRQLIMで設定して(TRQLIMINI←PRETRQLIM)、ステップS20へ進む。
【0054】
一方、ステップS17では、高地ストール発進判定フラグSTLSTの値のみを参照し、STLST=1の場合、高地ストール発進制御中であると判定し、ステップS18へ進み、又、STLST=0の場合、高地ストール発進制御ではないと判定して、ステップS19へ分岐する。
【0055】
ステップS18へ進むと、ステップS16で設定したエンジントルク上限初期値TRQLIMINIにプレエンジントルク上限加算値TRQNEUPを加算してエンジントルク上限値TRQLIMを設定し(TRQLIM←TRQLIMINI+TRQNEUP)、ステップS20へ進む。尚、上述したステップS15,S16,S18での処理が、本発明のエンジントルク上限値設定手段に対応している。
【0056】
一方、ステップS19へ進むと、高地ストール発進制御ではないため、プレエンジントルク上限値PRETRQLIMでエンジントルク上限値TRQLIMを設定して(TRQLIM←PRETRQLIM)、ステップS20へ進む。
【0057】
プレエンジントルク上限加算値TRQNEUPは、上述したステップS9,S11,S12において、高地ストール発進時目標エンジン回転数STLEGと実際のエンジン回転数Neとの差分に応じで設定される。
【0058】
その後、ステップS20において、ステップS15,S18、或いはステップS19で設定したエンジントルク上限値TRQLIMを、ECU11へ送信してルーチンを抜ける。
【0059】
ECU11では、TCU13で設定したエンジントルク上限値TRQLIMを目標エンジントルクとして設定し、エンジンの出力トルクが目標エンジントルク(エンジントルク上限値TRQLIM)となるように、スロットル弁8の開度をフィードバック制御する。その結果、空気密度の低い、高地でのストール発進時におけるエンジントルクの目減り分だけエンジン回転数Neが上昇される。尚、このECU11で実行される出力トルクの制御が、本発明の出力トルク制御手段に対応している。
【0060】
このように、TCU13では、高地ストール発進と判定した場合、最初にストール発進時のエンジントルク上限初期値TRQLIMINIを設定する。このエンジントルク上限初期値TRQLIMINIは、実際のエンジントルクTRQの目標値であり、高地、低地に拘らず設定される。その際、高地ストール発進では、空気密度の低下によりエンジントルクTRQが実質的に目減りしている。そのため、目標エンジントルクに対応するエンジン回転数を設定しても、実際のエンジントルクTRQが目標エンジントルクに追従しないことになる。そのため、本実施形態では、エンジントルク上限初期値TRQLIMINIに、プレエンジントルク上限加算値TRQNEUPを加算し、目減り分のエンジントルクを、エンジン回転数Neを上昇させることで補償する。
【0061】
このプレエンジントルク上限加算値TRQNEUPは、高地ストール発進時目標エンジン回転数STLEGとエンジン回転数Neとの差分に基づいて設定されるため、高地ストール発進であっても低地ストール発進時と同等のエンジントルクTRQを得ることができる。この場合、実際のエンジントルクTRQは、低地ストール発進と同等であるため、自動変速機3に過大な入力トルクが印加されず保護されると共に、車両の発進性能を確保することができる。
【0062】
次に、図4のタイムチャートを参照して、上述した高地ストール発進制御ルーチンで実行される高地ストール発進制御例について説明する。運転者がアクセルペダルをふみこむと、エンジン回転数Neがアイドル回転数IDLから徐々に上昇すると共に、エンジントルクTRQがアイドルトルクIDTRQから次第に上昇する。
【0063】
そして、運転者がアクセルペダルを踏み込んでも車両が発進しない場合、運転者はアクセルペダルを更に踏み込む。その結果、アクセルペダルの踏込み量を検出するアクセル開度APが高負荷発進判定開度APSL以上で(経過時間t0)、エンジン回転数Neがストール発進判定回転数STLSL以上であるとき(経過時間t1)、高地ストール発進と判定し、高地ストール発進判定フラグSTLSTをセットする。
【0064】
すると、高地ストール発進時プレエンジントルク上限値PRETRQLIMが設定され、この値がエンジントルク上限初期値TRQLIMINIとして設定される。尚、高地ストール発進時プレエンジントルク上限値PRETRQLIMは実際のエンジントルクTRQの上限値であり、後述するエンジントルク上限値TRQLIMは、高地ストール発進時のトルク不足を補うべくエンジン回転数Neを上昇させるために設定される見かけ上の値である。従って、実際のエンジントルクTRQは、高地ストール発進時プレエンジントルク上限値PRETRQLIMを越えることはない。
【0065】
高地ストール発進判定フラグSTLSTがセットされると、高地ストール発進時目標エンジン回転数STLEGと実際のエンジン回転数Neとの差分に応じてプレエンジントルク上限加算値TRQNEUPが設定され、このプレエンジントルク上限加算値TRQNEUPをエンジントルク上限初期値TRQLIMINIに加算して、エンジントルク上限値TRQLIMが設定される。
【0066】
その際、エンジン回転数Neの上昇が初期段階にあり、高地ストール発進時目標エンジン回転数STLEGと実際のエンジン回転数Neとの差分が回転上昇判定値ΔNe2以上の場合、このプレエンジントルク上限加算値TRQNEUPに設定増減値ΔUPを加算して、新たなプレエンジントルク上限加算値TRQNEUPが設定される。一方、高地ストール発進時目標エンジン回転数STLEGと実際のエンジン回転数Neとの差分が回転上昇判定値ΔNe2よりも小さく、且つ、微小判定値ΔNe1よりも大きい場合、このプレエンジントルク上限加算値TRQNEUPから設定増減値ΔUPを減算して、新たなプレエンジントルク上限加算値TRQNEUPが設定される。
【0067】
従って、エンジントルクTRQの上昇が初期段階では急勾配となり(経過時間t1〜t2)、直ちにトルクアップさせることができる。一方、終期段階では緩勾配となるため(経過時間t2〜t3)、エンジントルクのオーバーシュートを防止することができる。
【0068】
その後、エンジン回転数Neが高地ストール発進時目標エンジン回転数STLEGに近づくと、プレエンジントルク上限加算値TRQNEUPが一定値になるため、エンジン回転数Neがほぼ一定となり、従って、エンジントルクTRQも一定の状態を維持する(経過時間t3〜t5)。
【0069】
その間、車両が発進して(経過時間t4)、車速Vspが検出されると、この車速Vspの上昇に伴いプレエンジントルク上限値PRETRQLIMが増加される。そして、車速Vspが停止判定車速VspSLを越えると、TCU13は、高地ストール発進制御が終了したと判定し、高地ストール発進判定フラグSTLSTをクリアする(経過時間t5)。
【0070】
高地ストール発進判定フラグSTLSTがクリアされると、エンジントルク上限値TRQLIMは、プレエンジントルク上限値PRETRQLIMにて設定される。上述したように、このプレエンジントルク上限値PRETRQLIMは、車速Vspの上昇に伴って増加するように設定されているため、高地ストール発進制御から通常の走行制御への移行がスムーズとなる。
【0071】
尚、通常の素行制御へ移行した場合、プレエンジントルク上限値PRETRQLIMは通常走行制御時に設定される値となり、エンジン回転数Neは高地ストール発進時目標エンジン回転数STLEGを越えて上昇することが可能となる。
【0072】
因みに、本実施形態による高地ストール発進制御を採用しなかった従来のものでは、図4に一点鎖線で示すように、エンジン回転数Neが予め設定されている上限値(図においてはストール発進判定回転数STLSL)で一律に抑えられてしまうため、高地ストール発進では空気密度の低下から、相対的にエンジントルクTRQが、エンジントルク上限初期値TRQLIMINIに到達せず、結果として、トルク不足が発生する。
【符号の説明】
【0073】
1…エンジン、
2…トルクコンバータ、
3…自動変速機、
4…出力軸、
8…スロットル弁、
10…スロットル開度センサ、
11…エンジン制御装置(ECU)、
13…変速制御装置(TCU)、
14…エンジン回転数センサ、
15…アクセル開度センサ、
18…車速センサ、
AP…アクセル開度、
APSL…高負荷発進判定開度、
Ne…エンジン回転数、
PRETRQLIM…プレエンジントルク上限値、
STLEG…高地ストール発進時目標エンジン回転数、
STLST…高地ストール発進判定フラグ、
TRQ…エンジントルク、
TRQLIM…エンジントルク上限値、
TRQNEUP…プレエンジントルク上限加算値、
TV…スロットル開度、
Vsp…車速、
VspSL…停止判定車速、
ΔNe1…微小判定値、
ΔNe2…回転上昇判定値、
ΔUP…設定増減値
【技術分野】
【0001】
本発明は、ストール発進に際し、空気密度の低い高地であっても低地と同等のエンジントルクを得ることができるようにしたエンジントルク制御装置に関する。
【背景技術】
【0002】
従来、エンジンからの出力を、トルクコンバータを介して自動変速機に伝達する車両では、車両が発進する際に、運転者がアクセルペダルを踏み込んでエンジン回転数を上昇させると、その出力がトルクコンバータによりトルク増幅されて自動変速機に伝達される。
【0003】
従って、急登坂路での発進、縁石など段差を乗り越えるとき、或いは積載重量が大きい車両の発進に際しては、運転者がアクセルペダルを踏み込むことで、トルクコンバータでトルク増幅された駆動力が自動変速機に伝達されるため、車両を発進(ストール発進)させることが可能となる。尚、本出願では、通常のアクセルペダルの踏込みでは発進させることができないため、運転者がアクセルペダルを大きく踏み込んで、エンジン回転数を高回転にさせて発進させることをストール発進と称する。
【0004】
しかし、過大なトルク増幅は自動変速機に多大な負荷を掛けることになる。そのため、エンジンを制御するエンジン制御装置(ECU)では、ストール発進に際し、エンジンの出力トルクを、予め決められたトルクコンバータのストールトルク比(入力側トルクと出力側トルクとの比が最大になる発進時のトルク比)を越えないように制御している。
【0005】
すなわち、ECUでは、自動変速機の変速を制御する変速制御装置(TCU)において求めたストールトルク比に基づき、許容されるエンジントルク上限値を目標エンジントルクとして設定し、発進時のエンジントルクを制御する。これにより、ストール発進時において自動変速機にかかる負荷が小さくなり、発進性と変速機の保護との方向を満足させることができる。
【0006】
このようなストール発進時の制御として、特許文献1(特開平9−296741号公報)には、ストール発進時のエンジン回転数がストール状態発生と見做すための下限回転数(ストール回転数)を越えている場合、エンジン回転数をストール回転数以下とするための目標駆動トルクを設定し、エンジンの出力トルクが目標駆動トルクとなるようにスロットル弁開度を制御することで、自動変速機を過大な入力トルクから保護するようにした技術が開示されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平9−296741号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、高地は低地に比し空気密度が低いため、同一のスロットル開度では高地での出力トルクが相対的に低くなる。従って、ストール発進と見なされてエンジンの出力トルクが制限されると、低地では可能であったストール発進が、高地ではトルク不足により発進不良となる場合がある。
【0009】
この対策として、エンジントルク上限値を高めに設定することも考えられるが、低地におけるストール発進では、相対的にトルク過多となり自動変速機の耐久性が損なわれることになる。
【0010】
更に、高地走行では、運転者が車両を発進させようとする意思表示であるアクセルペダルの踏込みに反して、エンジンの出力トルクが制限されるため、運転者に違和感を与えてしまう不都合がある。
【0011】
本発明は、上記事情に鑑み、低地ストール発進と同等のエンジントルクを高地ストール発進においても得られるようにして、良好な発進性能を得ることができると共に、過大な入力トルクから、トルクコンバータ、自動変速機等の駆動系を保護することのできるエンジントルク制御装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明によるエンジントルク制御装置は、車速を検出する車速検出手段と、アクセル開度を検出するアクセル開度検出手段と、エンジン回転数を検出するエンジン回転数検出手段と、少なくとも前記アクセル開度検出手段で検出したアクセル開度及び前記エンジン回転数検出手段で検出したエンジン回転数が、低地の走行環境で設定されているストール発進上限値に達しても、前記車速検出手段で検出した車速が予め設定されている停止判定車速を越えていない場合、高地ストール発進と判定するストール発進判定手段と、前記ストール発進判定手段で高地ストール発進と判定された場合、高地ストール発進時の目標エンジントルクを出力することの可能な目標エンジン回転数を設定する高地ストール発進時目標エンジン回転数設定手段と、前記高地ストール発進時目標エンジン回転数設定手段で設定した目標エンジン回転数と前記エンジン回転数検出手段で検出したエンジン回転数との差分に応じてプレエンジントルク上限加算値を設定するプレエンジントルク上限加算値設定手段と、前記高地ストール発進時目標エンジン回転数設定手段で設定した高地ストール発進時目標エンジン回転数に基づいてプレエンジントルク上限値を設定する高地ストール発進時プレエンジントルク上限値設定手段と、上記高地ストール発進時プレエンジントルク上限値設定手段で設定したプレエンジントルク上限値に前記プレエンジントルク上限加算値設定手段で設定したプレエンジントルク上限加算値を加算してエンジントルク上限値を設定するエンジントルク上限値設定手段と、前記エンジントルク上限値設定手段で設定したエンジントルク上限値を目標エンジントルクとして設定してエンジンの出力トルクを制御する出力トルク制御手段とを備える。
【発明の効果】
【0013】
本発明によれば、高地でのストール発進に際し、低地でのストール発進と同等のエンジンの出力トルクが得られるまでエンジン回転数を上昇させて、低地ストール発進時と同等のエンジントルクを高地ストール発進時においても得られるようにしたので、高地ストール発進に際し、良好な発進性能を得ることができると共に、過大な入力トルクから、トルクコンバータ、自動変速機等の駆動系を保護することができる。
【図面の簡単な説明】
【0014】
【図1】パワートレインの制御系を示す概略構成図
【図2】高地ストール発進制御ルーチンを示すフローチャート(その1)
【図3】高地ストール発進制御ルーチンを示すフローチャート(その2)
【図4】高地ストール発進制御のタイムチャートを示し、(a)はアクセル開度の変化を示すタイムチャート、(b)はエンジン回転数の変化を示すタイムチャート、(c)はエンジンの出力トルクとトルク上限値の変化を示すタイムチャート、(d)は車速の変化を示すタイムチャート、(e)はストール発進判定フラグの変化を示すタイムチャート
【発明を実施するための形態】
【0015】
以下、図面に基づいて本発明の一実施形態を説明する。尚、本実施形態では、空気密度の低い走行環境を高地と称し、通常の空気密度(標準大気圧)を有する走行環境を低地と称する。
【0016】
図1の符号1はエンジンで、このエンジン1の出力側に、トルクコンバータ2を介して自動変速機3が連設されている。エンジン1からの出力は、トルクコンバータ2の流体を介し、或いはロックアップクラッチが締結されたロックアップ締結状態のときは、エンジン1と自動変速機3とが直結状態となるためトルクコンバータ2の流体を介さずに、ロックアップクラッチを介して自動変速機3に伝達され、この自動変速機3で所定の変速比に変速された後、出力軸4から後輪或いは前輪等の駆動輪側へ動力が伝達される。
【0017】
又、エンジン1の吸気ポート(図示せず)に連通する吸気通路5の中途に電子制御スロットル装置(ETC)6が配設されている。このETC6はスロットル弁8を有し、このスロットル弁8の一端が、電動モータ等からなるスロットルモータ9に連結され、他端にポテンショメータ等からなるスロットル開度センサ10が連設されている。
【0018】
スロットルモータ9は、後述するエンジン制御ユニット(ECU)11からの駆動信号にて駆動されてスロットル弁8が所定に開弁される。このスロットル弁8のスロットル開度TV[%]は、スロットル開度センサ10で検出されてECU11へ出力される。
【0019】
又、自動変速機3には遊星歯車等で構成された変速機構が内装されていると共に、この変速機構を適宜駆動させるクラッチやブレーキ等から成る摩擦締結要素、及びトルクコンバータ2に設けられているロックアップクラッチを、選択的に開放或いは締結動作させるコントロールバルブユニット12が併設されている。このコントロールバルブユニット12に対する駆動信号は、後述する変速制御装置(TCU)13から出力される。
【0020】
ECU11、及びTCU13は、CPU、ROM、RAM等を備えたマイクロコンピュータを主体に構成されており、両ユニット11,13はバスラインを介して双方向通信自在に接続されている。又、ECU11の入力側には、上述したスロットル開度センサ10以外に、エンジン回転数Ne[rpm]を検出するエンジン回転数検出手段としてのエンジン回転数センサ14、アクセルペダル(図示せず)の踏込み量であるアクセル開度AP[%]を検出するアクセル開度検出手段としてのアクセル開度センサ15、エンジン温度の代表である冷却水温Tw[℃]を検出する冷却水温センサ16等、エンジン運転状態を検出するセンサ類が接続されている。又、ECU11の出力側に、図示しない燃料噴射装置のインジェクタ、点火装置のイグナイタ、及びETC6に設けられているスロットルモータ9等、エンジンを制御するアクチュエータ類が接続されている。
【0021】
一方、TCU13の入力側に、トルクコンバータ2に設けられているタービン軸の回転数(タービン回転数)Ntを検出するタービン回転数センサ17、出力軸4の回転数から車速Vspを検出する車速検出手段としての車速センサ18、ブレーキペダルの踏込みでON動作するブレーキスイッチ19等、車両の運転状態を検出するセンサ類が接続されている。又、このTCU13の出力側に、コントロールバルブユニット12に設けられている各アクチュエータが接続されている。
【0022】
ECU11は、アクセル開度センサ15で検出したアクセル開度AP等に基づき目標エンジントルクを求め、実際のエンジントルク(実エンジントルク)TRQを目標エンジントルクに収束させるべくスロットル弁8の開度(スロットル開度)TVを制御する。同時に、周知の燃料制御、点火時期制御等を実行して、エンジン全体を制御する。
【0023】
一方、TCU13は、セレクトレバーがドライブ(D)レンジにセットされている場合、アクセル開度APと車速Vspとに基づき、ROM等に予め記憶されている変速パターンを参照して、変速タイミングを判定し、変速時には変速信号をコントロールバルブユニット12へ出力して変速制御を行う。同時に、トルクコンバータ2のロックアップ、スリップロックアップ等のトルクコンバータ制御を行う。
【0024】
ところで、車両をストール発進させるべくアクセルペダルを大きく踏み込むと、トルクコンバータ2のトルク増幅率が過大となり、自動変速機3に大きな負荷を掛けることになる。そのため、TCU13は、ストール発進を検出した場合、先ず、保護制御条件毎に、自動変速機3にて許容されるプレエンジントルク上限値PRETRQLIMを求め、このプレエンジントルク上限値PRETRQLIMを初期値としてエンジントルク上限値TRQLIMを求め、このエンジントルク上限値TRQLIMをECU11へ送信する。尚、保護制御条件としては、油温を下げるための高油温時制御、高地ストール発進時の空気密度の低下によるトルク不足を補償する高地ストール発進時制御、システム故障時にフェイルセーフ等を実行させるシステム故障時制御、通常走行時制御等がある。
【0025】
ECU11は、受信したエンジントルク上限値TRQLIMを目標エンジントルクとして設定し、実際のエンジントルクTRQが目標エンジントルクとなるようにスロットル弁8の開度を制御する。これにより、ストール発進時において自動変速機3に過大な負荷がかかることが防止され、発進性と自動変速機3の保護との双方が満足される。
【0026】
しかし、高地走行では、空気密度が低いため、実際のエンジントルクが目標エンジントルクに達しない場合が生じる。その結果、通常の空気密度(標準大気圧)を有する低地の走行環境では保証されているストール発進が、高地ではトルク不足により確保できなくなる。
【0027】
そのため、TCU13では、高地ストール発進時のプレエンジントルク上限値PRETRQLIMを、通常のストール発進時とは別に設定するようにし、高地ストール発進時のトルク不足を補償するようにしている。TCU13で実行される高地ストール発進制御は、具体的には、図2〜図3に示す高地ストール発進制御ルーチンに従って処理される。
【0028】
このルーチンは、イグニッションスイッチをONした後、設定演算周期毎に実行される。先ず、ステップS1で、車速Vsp、アクセル開度AP、エンジン回転数Ne、ブレーキスイッチ19からのON/OFF信号等の運転状態パラメータを読込み、ステップS2で、高地ストール発進判定を行う。尚、このステップでの処理が本発明のストール発進判定手段に対応している。
【0029】
ステップS2で実行される高地ストール発進判定条件は以下の通りである。
【0030】
(1)車速Vspが停止判定車速VspSL未満(Vsp<VspSL)である。
【0031】
(2)アクセル開度APが高負荷発進判定開度APSL以上(AP≦APSL)である。
【0032】
(3)エンジン回転数Neがストール発進判定回転数STLSL以上である。
【0033】
(4)TCU13で設定したプレエンジントルク上限値PRETRQLIMが、想定するエンジントルク上限値TRQLIM以下(PRETRQLIM≦TRQLIM)である。
【0034】
(5)想定するエンジントルク上限値TRQLIMが、ECU11で設定した目標エンジントルクとほぼ同一である(TRQLIM≒目標エンジントルク)。
【0035】
(6)他の保護制御(高油温時制御、システム故障制御、通常走行時制御等)が起動していない。
【0036】
(7)ブレーキスイッチがOFFである。
【0037】
尚、高負荷発進判定開度APSL、及びストール発進判定回転数STLSLは、低地等、通常の空気密度下のアクセル操作であれば、当然ストール発進が可能な上限値であり、予め実験などから求めて設定されている。
【0038】
ステップS2では、これらの条件が全て満足している場合、すなわち、低地では、アクセル開度APが高負荷発進判定開度APSLに到達する以前、或いはエンジン回転数Neがストール発進判定回転数STLSLに到達する以前に車両がストール発進する走行環境であるにも拘らず、車速Vspが停止判定車速VspSLを維持している場合は、空気密度が低く、トルク不足が発生している高地ストール発進と判定する。
【0039】
そして、高地ストール発進と判定した場合は、ステップS3へ進み、高地ストール発進判定フラグSTLSTをセットし(STLST←1)、ステップS5へ進む。一方、高地ストール発進判定条件の1つでも満足されていない場合は、通常ストール発進制御に備えるべく、ステップS4へ進み、高地ストール発進判定フラグSTLSTをクリアして(STLST←0)、ステップS5へ進む。
【0040】
ステップS5では、高地ストール発進判定フラグSTLSTの値を参照し、ストール発進制御中か否かを調べ、STLST=1の高地ストール発進制御中のときは、ステップS6へ進む。又、STLST=0のときは、ステップS8へ分岐し、このステップS8で、プレエンジントルク上限加算値TRQNEUPをクリアして(TRQNEUP←0)、ステップS13へ進む。
【0041】
一方、ステップS5からステップS6へ進むと、高地ストール発進時目標エンジン回転数STLEGを設定する。この高地ストール発進時目標エンジン回転数STLEGは、高地ストール発進時の目標エンジントルクを出力することの可能なエンジン回転数の目標値(目標エンジン回転数)であり、トルクコンバータ2、及び自動変速機3等の駆動系が許容できる入力回転数よりも低く、しかも、その中で最も大きなエンジン回転数に設定されている。尚、本実施形態では、トルクコンバータ2のストールトルク比と自動変速機3内を潤滑するオイルの温度(油温)とに基づいて高地ストール発進時目標エンジン回転数STLEGが設定されている。尚、このステップS6での処理が、本発明の高地ストール発進時目標エンジン回転数設定手段に対応している。
【0042】
次いで、ステップS7へ進み、高地ストール発進時目標エンジン回転数STLEGとエンジン回転数Neとの差分の絶対値と微小判定値ΔNe1とを比較して、エンジン回転数Neが高地ストール発進時目標エンジン回転数STLEGにほぼ達したか否かを調べる。
【0043】
そして、両エンジン回転数STLEG,Neの差分の絶対値が微小判定値ΔNe1以内、すなわち0に近い場合は(|STLEG−Ne|≦ΔNe1)、エンジン回転数Neがアクセルペダルの踏込みで上昇し、高地ストール発進時目標エンジン回転数STLEGにほぼ達したと判定し、ステップS9へ進む。ステップS9では、前回の演算時に求めたプレエンジントルク上限加算値TRQNEUP(n-1)を、今回のプレエンジントルク上限加算値TRQNEUPとして設定して(TRQNEUP←TRQNEUP(n-1))、ステップS13へ進む。従って、この場合、プレエンジントルク上限加算値TRQNEUPは一定値を維持することになる。
【0044】
一方、|STLEG−Ne|>ΔNe1の場合は、ステップS10へ分岐し、両エンジン回転数STLEG,Neの差分と回転上昇判定値ΔNe2(但し、ΔNe1≪ΔNe2)とを比較する。
【0045】
そして、STLEG−Ne≧ΔNe2のときは、高地ストール発進時目標エンジン回転数STLEGとエンジン回転数Neの差が大きく、トルク不足であると判定し、ステップS11へ進む。又、STLEG−Ne<ΔNe2のとき、すなわち、ΔNe1<STLEG−Ne<ΔNe2のときは、エンジン回転数Neが高地ストール発進時目標エンジン回転数STLEGに近づいていると判定し、ステップS12へ分岐する。
【0046】
ステップS11へ進むと、前回の演算時に求めたプレエンジントルク上限加算値TRQNEUP(n-1)に設定増減値ΔUPを加算して、今回のプレエンジントルク上限加算値TRQNEUPを設定し(TRQNEUP←TRQNEUP(n-1)+ΔUP)、ステップS13へ進む。又、ステップS12へ進むと、前回の演算時に求めたプレエンジントルク上限加算値TRQNEUP(n-1)から設定増減値ΔUPを減算して、今回のプレエンジントルク上限加算値TRQNEUPを設定し(TRQNEUP←TRQNEUP(n-1)−ΔUP)、ステップS13へ進む。尚、上述したステップS7,S9〜S12での処理が、本発明のプレエンジントルク上限加算値設定手段に対応している。
【0047】
このプレエンジントルク上限加算値TRQNEUPは、後述するステップS15,S18で読込まれ、プレエンジントルク上限値PRETRQLIM、或いはエンジントルク上限初期値TRQLIMINIに加算されてエンジントルク上限値TRQLIMが設定される。高地ストール発進と判定された直後は、高地ストール発進時目標エンジン回転数STLEGと実際のエンジン回転数Neと開きが大きいため、エンジントルク上限値TRQLIMは、プレエンジントルク上限加算値TRQNEUPに設定増減値ΔUPを加算した大きな値となり、比較的急な勾配の傾斜で増加される。一方、実際のエンジン回転数Neが高地ストール発進時目標エンジン回転数STLEGに近づくと、エンジントルク上限値TRQLIMは、プレエンジントルク上限加算値TRQNEUPから設定増減値ΔUPを減算した小さな値となり、比較的緩い勾配の傾斜で増加される。すなわち、最初に高地ストール発進と判定されたときから、エンジントルク上限値TRQLIMは、高地ストール発進時目標エンジン回転数STLEGと実際のエンジン回転数Neとの差分に対応した勾配で上昇される。
【0048】
ステップS13へ進むと、個々の保護制御毎にプレエンジントルク上限値PRETRQLIMを算出する。プレエンジントルク上限値PRETRQLIMは保護制御条件毎に相違しており、保護制御条件としては高油温時制御、通常ストール発進時制御、高地ストール発進時制御、システム故障時制御、通常走行時制御等がある。尚、本実施形態では、高地ストール発進時プレエンジントルク上限値PRETRQLIMを、ストール発進時に車速Vspが検出された場合、この車速Vspの上昇に応じて増加するように設定されている。
【0049】
例えば、高地ストール発進判定フラグSTLSTがセットされている高地ストール発進の際には、高地ストール発進時プレエンジントルク上限値PRETRQLIMが選択される。この高地ストール発進時プレエンジントルク上限値PRETRQLIMは、上述した高地ストール発進時目標エンジン回転数STLEGに基づいて設定される。このステップS13での高地ストール発進時プレエンジントルク上限値PRETRQLIMを設定する処理が、本発明の高地ストール発進時プレエンジントルク上限値設定手段に対応している。
【0050】
尚、高地ストール発進以外の保護制御条件が実行されている場合は、前述したステップS2の高地ストール発進判定条件の「(6)他の保護制御が起動していない」の項目が満足されないため、高地ストール発進制御は実行されず、従って、高地ストール発進制御と他の保護制御とが干渉することはない。
【0051】
又、上述したように、高地ストール発進時プレエンジントルク上限値PRETRQLIMは、車両の車速Vspが検出され始めると、当該車速Vspの上昇に伴って増加するように設定される。従って、高地ストール発進時プレエンジントルク上限値PRETRQLIMが、ECU11で設定されるエンジントルク上限値TRQLIMを上回る場合がある。この場合は、上述したステップS2の高地ストール発進判定条件の(4)項が満足されなくなるため、高地ストール発進制御は解除される。その結果、高地ストール発進制御が解除されて通常走行制御へ移行する際の走行制御の切り替りが円滑化される。
【0052】
その後、ステップS14へ進み、今回の高地ストール発進判定フラグSTLSTの値と前回の演算時に求めた高地ストール発進判定フラグSTLST(n-1)の値とを調べ、STLST=1、且つSTLST(n-1)=0の場合、すなわち、高地ストール発進と判定されて最初のルーチンのときはステップS15へ進み、それ以外の態様ではステップS17へ分岐する。
【0053】
ステップS15へ進むと、プレエンジントルク上限値PRETRQLIMにプレエンジントルク上限加算値TRQNEUPを加算してエンジントルク上限値TRQLIMを求めて(TRQLIM←PRETRQLIM+TRQNEUP)、ステップS16へ進む。ステップS16では、エンジントルク上限初期値TRQLIMINIを、今回求めたプレエンジントルク上限値PRETRQLIMで設定して(TRQLIMINI←PRETRQLIM)、ステップS20へ進む。
【0054】
一方、ステップS17では、高地ストール発進判定フラグSTLSTの値のみを参照し、STLST=1の場合、高地ストール発進制御中であると判定し、ステップS18へ進み、又、STLST=0の場合、高地ストール発進制御ではないと判定して、ステップS19へ分岐する。
【0055】
ステップS18へ進むと、ステップS16で設定したエンジントルク上限初期値TRQLIMINIにプレエンジントルク上限加算値TRQNEUPを加算してエンジントルク上限値TRQLIMを設定し(TRQLIM←TRQLIMINI+TRQNEUP)、ステップS20へ進む。尚、上述したステップS15,S16,S18での処理が、本発明のエンジントルク上限値設定手段に対応している。
【0056】
一方、ステップS19へ進むと、高地ストール発進制御ではないため、プレエンジントルク上限値PRETRQLIMでエンジントルク上限値TRQLIMを設定して(TRQLIM←PRETRQLIM)、ステップS20へ進む。
【0057】
プレエンジントルク上限加算値TRQNEUPは、上述したステップS9,S11,S12において、高地ストール発進時目標エンジン回転数STLEGと実際のエンジン回転数Neとの差分に応じで設定される。
【0058】
その後、ステップS20において、ステップS15,S18、或いはステップS19で設定したエンジントルク上限値TRQLIMを、ECU11へ送信してルーチンを抜ける。
【0059】
ECU11では、TCU13で設定したエンジントルク上限値TRQLIMを目標エンジントルクとして設定し、エンジンの出力トルクが目標エンジントルク(エンジントルク上限値TRQLIM)となるように、スロットル弁8の開度をフィードバック制御する。その結果、空気密度の低い、高地でのストール発進時におけるエンジントルクの目減り分だけエンジン回転数Neが上昇される。尚、このECU11で実行される出力トルクの制御が、本発明の出力トルク制御手段に対応している。
【0060】
このように、TCU13では、高地ストール発進と判定した場合、最初にストール発進時のエンジントルク上限初期値TRQLIMINIを設定する。このエンジントルク上限初期値TRQLIMINIは、実際のエンジントルクTRQの目標値であり、高地、低地に拘らず設定される。その際、高地ストール発進では、空気密度の低下によりエンジントルクTRQが実質的に目減りしている。そのため、目標エンジントルクに対応するエンジン回転数を設定しても、実際のエンジントルクTRQが目標エンジントルクに追従しないことになる。そのため、本実施形態では、エンジントルク上限初期値TRQLIMINIに、プレエンジントルク上限加算値TRQNEUPを加算し、目減り分のエンジントルクを、エンジン回転数Neを上昇させることで補償する。
【0061】
このプレエンジントルク上限加算値TRQNEUPは、高地ストール発進時目標エンジン回転数STLEGとエンジン回転数Neとの差分に基づいて設定されるため、高地ストール発進であっても低地ストール発進時と同等のエンジントルクTRQを得ることができる。この場合、実際のエンジントルクTRQは、低地ストール発進と同等であるため、自動変速機3に過大な入力トルクが印加されず保護されると共に、車両の発進性能を確保することができる。
【0062】
次に、図4のタイムチャートを参照して、上述した高地ストール発進制御ルーチンで実行される高地ストール発進制御例について説明する。運転者がアクセルペダルをふみこむと、エンジン回転数Neがアイドル回転数IDLから徐々に上昇すると共に、エンジントルクTRQがアイドルトルクIDTRQから次第に上昇する。
【0063】
そして、運転者がアクセルペダルを踏み込んでも車両が発進しない場合、運転者はアクセルペダルを更に踏み込む。その結果、アクセルペダルの踏込み量を検出するアクセル開度APが高負荷発進判定開度APSL以上で(経過時間t0)、エンジン回転数Neがストール発進判定回転数STLSL以上であるとき(経過時間t1)、高地ストール発進と判定し、高地ストール発進判定フラグSTLSTをセットする。
【0064】
すると、高地ストール発進時プレエンジントルク上限値PRETRQLIMが設定され、この値がエンジントルク上限初期値TRQLIMINIとして設定される。尚、高地ストール発進時プレエンジントルク上限値PRETRQLIMは実際のエンジントルクTRQの上限値であり、後述するエンジントルク上限値TRQLIMは、高地ストール発進時のトルク不足を補うべくエンジン回転数Neを上昇させるために設定される見かけ上の値である。従って、実際のエンジントルクTRQは、高地ストール発進時プレエンジントルク上限値PRETRQLIMを越えることはない。
【0065】
高地ストール発進判定フラグSTLSTがセットされると、高地ストール発進時目標エンジン回転数STLEGと実際のエンジン回転数Neとの差分に応じてプレエンジントルク上限加算値TRQNEUPが設定され、このプレエンジントルク上限加算値TRQNEUPをエンジントルク上限初期値TRQLIMINIに加算して、エンジントルク上限値TRQLIMが設定される。
【0066】
その際、エンジン回転数Neの上昇が初期段階にあり、高地ストール発進時目標エンジン回転数STLEGと実際のエンジン回転数Neとの差分が回転上昇判定値ΔNe2以上の場合、このプレエンジントルク上限加算値TRQNEUPに設定増減値ΔUPを加算して、新たなプレエンジントルク上限加算値TRQNEUPが設定される。一方、高地ストール発進時目標エンジン回転数STLEGと実際のエンジン回転数Neとの差分が回転上昇判定値ΔNe2よりも小さく、且つ、微小判定値ΔNe1よりも大きい場合、このプレエンジントルク上限加算値TRQNEUPから設定増減値ΔUPを減算して、新たなプレエンジントルク上限加算値TRQNEUPが設定される。
【0067】
従って、エンジントルクTRQの上昇が初期段階では急勾配となり(経過時間t1〜t2)、直ちにトルクアップさせることができる。一方、終期段階では緩勾配となるため(経過時間t2〜t3)、エンジントルクのオーバーシュートを防止することができる。
【0068】
その後、エンジン回転数Neが高地ストール発進時目標エンジン回転数STLEGに近づくと、プレエンジントルク上限加算値TRQNEUPが一定値になるため、エンジン回転数Neがほぼ一定となり、従って、エンジントルクTRQも一定の状態を維持する(経過時間t3〜t5)。
【0069】
その間、車両が発進して(経過時間t4)、車速Vspが検出されると、この車速Vspの上昇に伴いプレエンジントルク上限値PRETRQLIMが増加される。そして、車速Vspが停止判定車速VspSLを越えると、TCU13は、高地ストール発進制御が終了したと判定し、高地ストール発進判定フラグSTLSTをクリアする(経過時間t5)。
【0070】
高地ストール発進判定フラグSTLSTがクリアされると、エンジントルク上限値TRQLIMは、プレエンジントルク上限値PRETRQLIMにて設定される。上述したように、このプレエンジントルク上限値PRETRQLIMは、車速Vspの上昇に伴って増加するように設定されているため、高地ストール発進制御から通常の走行制御への移行がスムーズとなる。
【0071】
尚、通常の素行制御へ移行した場合、プレエンジントルク上限値PRETRQLIMは通常走行制御時に設定される値となり、エンジン回転数Neは高地ストール発進時目標エンジン回転数STLEGを越えて上昇することが可能となる。
【0072】
因みに、本実施形態による高地ストール発進制御を採用しなかった従来のものでは、図4に一点鎖線で示すように、エンジン回転数Neが予め設定されている上限値(図においてはストール発進判定回転数STLSL)で一律に抑えられてしまうため、高地ストール発進では空気密度の低下から、相対的にエンジントルクTRQが、エンジントルク上限初期値TRQLIMINIに到達せず、結果として、トルク不足が発生する。
【符号の説明】
【0073】
1…エンジン、
2…トルクコンバータ、
3…自動変速機、
4…出力軸、
8…スロットル弁、
10…スロットル開度センサ、
11…エンジン制御装置(ECU)、
13…変速制御装置(TCU)、
14…エンジン回転数センサ、
15…アクセル開度センサ、
18…車速センサ、
AP…アクセル開度、
APSL…高負荷発進判定開度、
Ne…エンジン回転数、
PRETRQLIM…プレエンジントルク上限値、
STLEG…高地ストール発進時目標エンジン回転数、
STLST…高地ストール発進判定フラグ、
TRQ…エンジントルク、
TRQLIM…エンジントルク上限値、
TRQNEUP…プレエンジントルク上限加算値、
TV…スロットル開度、
Vsp…車速、
VspSL…停止判定車速、
ΔNe1…微小判定値、
ΔNe2…回転上昇判定値、
ΔUP…設定増減値
【特許請求の範囲】
【請求項1】
車速を検出する車速検出手段と、
アクセル開度を検出するアクセル開度検出手段と、
エンジン回転数を検出するエンジン回転数検出手段と、
少なくとも前記アクセル開度検出手段で検出したアクセル開度及び前記エンジン回転数検出手段で検出したエンジン回転数が、低地の走行環境で設定されているストール発進上限値に達しても、前記車速検出手段で検出した車速が予め設定されている停止判定車速を越えていない場合、高地ストール発進と判定するストール発進判定手段と、
前記ストール発進判定手段で高地ストール発進と判定された場合、高地ストール発進時の目標エンジントルクを出力することの可能な目標エンジン回転数を設定する高地ストール発進時目標エンジン回転数設定手段と、
前記高地ストール発進時目標エンジン回転数設定手段で設定した目標エンジン回転数と前記エンジン回転数検出手段で検出したエンジン回転数との差分に応じてプレエンジントルク上限加算値を設定するプレエンジントルク上限加算値設定手段と、
前記高地ストール発進時目標エンジン回転数設定手段で設定した高地ストール発進時目標エンジン回転数に基づいてプレエンジントルク上限値を設定する高地ストール発進時プレエンジントルク上限値設定手段と、
上記高地ストール発進時プレエンジントルク上限値設定手段で設定したプレエンジントルク上限値に前記プレエンジントルク上限加算値設定手段で設定したプレエンジントルク上限加算値を加算してエンジントルク上限値を設定するエンジントルク上限値設定手段と、
前記エンジントルク上限値設定手段で設定したエンジントルク上限値を目標エンジントルクとして設定してエンジンの出力トルクを制御する出力トルク制御手段と
を備えることを特徴とするエンジントルク制御装置。
【請求項2】
前記プレエンジントルク上限加算値設定手段は、前記高地ストール発進時目標エンジン回転数設定手段で設定した目標エンジン回転数と前記エンジン回転数検出手段で検出したエンジン回転数との差分が0に近い場合は、前回の演算時に設定した前記プレエンジントルク上限加算値を維持し、該差分が大きくなるに従い前記プレエンジントルク上限加算値を大きな値で設定する
ことを特徴とする請求項1記載のエンジントルク制御装置。
【請求項3】
前記プレエンジントルク上限値設定手段は、前記プレエンジントルク上限値を前記車速検出手段で検出した車速の上昇に応じて増加させる
ことを特徴とする請求項1或いは2記載のエンジントルク制御装置。
【請求項1】
車速を検出する車速検出手段と、
アクセル開度を検出するアクセル開度検出手段と、
エンジン回転数を検出するエンジン回転数検出手段と、
少なくとも前記アクセル開度検出手段で検出したアクセル開度及び前記エンジン回転数検出手段で検出したエンジン回転数が、低地の走行環境で設定されているストール発進上限値に達しても、前記車速検出手段で検出した車速が予め設定されている停止判定車速を越えていない場合、高地ストール発進と判定するストール発進判定手段と、
前記ストール発進判定手段で高地ストール発進と判定された場合、高地ストール発進時の目標エンジントルクを出力することの可能な目標エンジン回転数を設定する高地ストール発進時目標エンジン回転数設定手段と、
前記高地ストール発進時目標エンジン回転数設定手段で設定した目標エンジン回転数と前記エンジン回転数検出手段で検出したエンジン回転数との差分に応じてプレエンジントルク上限加算値を設定するプレエンジントルク上限加算値設定手段と、
前記高地ストール発進時目標エンジン回転数設定手段で設定した高地ストール発進時目標エンジン回転数に基づいてプレエンジントルク上限値を設定する高地ストール発進時プレエンジントルク上限値設定手段と、
上記高地ストール発進時プレエンジントルク上限値設定手段で設定したプレエンジントルク上限値に前記プレエンジントルク上限加算値設定手段で設定したプレエンジントルク上限加算値を加算してエンジントルク上限値を設定するエンジントルク上限値設定手段と、
前記エンジントルク上限値設定手段で設定したエンジントルク上限値を目標エンジントルクとして設定してエンジンの出力トルクを制御する出力トルク制御手段と
を備えることを特徴とするエンジントルク制御装置。
【請求項2】
前記プレエンジントルク上限加算値設定手段は、前記高地ストール発進時目標エンジン回転数設定手段で設定した目標エンジン回転数と前記エンジン回転数検出手段で検出したエンジン回転数との差分が0に近い場合は、前回の演算時に設定した前記プレエンジントルク上限加算値を維持し、該差分が大きくなるに従い前記プレエンジントルク上限加算値を大きな値で設定する
ことを特徴とする請求項1記載のエンジントルク制御装置。
【請求項3】
前記プレエンジントルク上限値設定手段は、前記プレエンジントルク上限値を前記車速検出手段で検出した車速の上昇に応じて増加させる
ことを特徴とする請求項1或いは2記載のエンジントルク制御装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−50056(P2013−50056A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2011−187786(P2011−187786)
【出願日】平成23年8月30日(2011.8.30)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成23年8月30日(2011.8.30)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
[ Back to top ]