
エンジン再始動制御装置
【課題】車両のエンジンの再始動に際してブレーキペダルの操作が解除された後もエンジンの再始動が完了するまではブレーキ圧を保持する場合に、車両の飛び出し感及びブレーキの引きずり感の防止を図ることである。
【解決手段】時刻t3のブレーキ保持圧は所定圧M2より大きいので、減圧値1を用いてブレーキ保持圧を減圧していく。その後、時刻t4では、ブレーキ保持圧が所定圧M2まで低下したので、減圧値2を用いてブレーキ保持圧を減圧していく。よって、時刻t3〜t4に比べて時刻t4以後はブレーキ保持圧の減圧速度が緩やかになる。
【解決手段】時刻t3のブレーキ保持圧は所定圧M2より大きいので、減圧値1を用いてブレーキ保持圧を減圧していく。その後、時刻t4では、ブレーキ保持圧が所定圧M2まで低下したので、減圧値2を用いてブレーキ保持圧を減圧していく。よって、時刻t3〜t4に比べて時刻t4以後はブレーキ保持圧の減圧速度が緩やかになる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、予め定められた停止条件を満たしたときは車両のエンジンを停止し、当該停止後に予め定められた再始動条件を満たしたときはエンジンを再始動して、エンジンの再始動に際してブレーキペダルの操作が解除された後もエンジンの再始動が完了するまでブレーキ圧を保持するエンジン再始動制御装置に関する。
【背景技術】
【0002】
特許文献1の技術では、制御ユニットは、ブレーキ液圧保持装置の異常を検知可能な異常検知手段を備え、この異常検知手段によりブレーキ液圧保持装置が異常であると判定した後、自動停止条件のうち傾斜角検知手段により検知された車両の実傾斜角に関する判定値を変更することにより自動停止実行と自動停止禁止との判定条件を変更する。
特許文献2の技術では、エンジン自動停止後、エンジン始動条件が成立したか否か判定され、エンジン始動条件が成立の場合、エンジンに始動指令を送りエンジンを始動させると共に、タービン回転数が600rpmを越えて300rpmを下回るまでヒルホールド制御部がブレーキ液圧を保持する。タービン回転数が300rpmを下回ると、ブレーキ液圧が減圧される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008‐128132公報
【特許文献2】特開2010‐52568公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
アイドルストップシステムは、信号待ちや交通渋滞などで車両が停止した際に、運転者がイグニッションキーを操作することなくエンジンを自動停止し、その後、自動で再始動させるシステムである。
また、ヒルホールド制御は、登坂路等の傾斜している場所でアイドルストップシステムによりエンジンを停止した場合に、その後のエンジンの再始動の際に運転者がブレーキペダルを解放してからアクセルペダルに踏み替えるまでの間、ブレーキ圧を保持して、車両のずり下がりを防止する制御である。このヒルホールド制御では、エンジンの再始動後にブレーキ圧を漸次減圧して0にする。
【0005】
しかしながら、エンジンの再始動後にブレーキ圧を減圧する場合に、特許文献1,2に開示のように一定の減圧速度でブレーキ圧を減圧していくと、減圧速度が速すぎるときは保持圧が一気に減圧されるので、降坂路等では車両の発進時に車両が急に飛び出すような飛び出し感等の違和感を与えてしまう不具合がある。また、減圧速度が遅すぎる場合には車両の発進時にブレーキを引きずるような引きずり感等の違和感を与えてしまう不具合がある。
【0006】
本発明の目的は、車両のエンジンの再始動に際してブレーキペダルの操作が解除された後もエンジンの再始動が完了するまではブレーキ圧を保持する場合に、車両の飛び出し感及びブレーキの引きずり感の防止を図ることである。
【課題を解決するための手段】
【0007】
(1)本発明の一実施態様は、予め定められた停止条件を満たしたときは車両のエンジンを停止し当該停止後に予め定められた再始動条件を満たしたときは前記エンジンを再始動するエンジン制御手段と、前記エンジンの再始動に際してブレーキペダルの操作が解除された後も当該エンジンの再始動が完了するまでブレーキ圧を保持するブレーキ圧保持手段と、を備えているエンジン再始動制御装置において、前記エンジンの再始動が完了して以後は前記ブレーキ圧を漸次減圧し当該ブレーキ圧の減圧に際して減圧速度を減圧途中で変更する減圧手段を備えていることを特徴とするエンジン再始動制御装置である。
【0008】
(2) (1)の実施態様において、前記減圧手段は、前記ブレーキ圧の減圧の際に当該ブレーキ圧が所定圧より大きい場合は第1の減圧速度で当該ブレーキ圧を減圧し前記所定圧以下の場合は前記第1の減圧速度より小さい第2の減圧速度で当該ブレーキ圧を減圧する、ことを特徴とするようにしてもよい。
(3) (2)の実施態様において、車両の車速を検出する車速検出手段と、車両の傾斜角を検出する傾斜角検出手段と、をさらに備え、前記減圧手段は、前記車速検出手段が検出した車速が零であるときに前記傾斜角検出手段で検出された傾斜角に基づいて前記所定圧を求める、ことを特徴とするようにしてもよい。
【0009】
(4) (3)の実施態様において、アクセル開度を検出するアクセル開度検出手段をさらに備え、前記減圧手段は、前記ブレーキ圧を減圧中に前記アクセル開度検出手段によりアクセル操作が検出されていない状態で車速検出手段により車速が検出されたときは当該検出された車速に基づいて前記所定圧を求める、ことを特徴とするようにしてもよい。
(5) (2)の実施態様において、アクセル開度を検出するアクセル開度検出手段をさらに備え、前記減圧手段は、前記ブレーキ圧を減圧中に前記アクセル開度検出手段によりアクセル操作が検出されたときは前記第1の減圧速度より大きい第3の減圧速度で前記ブレーキ圧を減圧する、ことを特徴とするようにしてもよい。
【0010】
(6) (5)の実施態様において、前記減圧手段は、前記アクセル開度検出手段により検出されたアクセル開度に基づいて前記第3の減圧速度を求める、ことを特徴とするようにしてもよい。
(7) (2)の実施態様において、車両の傾斜角を検出する傾斜角検出手段をさらに備え、前記減圧手段は、前記傾斜角検出手段により検出された傾斜角に基づいて前記第2の減圧速度を求める、ことを特徴とするようにしてもよい。
【発明の効果】
【0011】
(1)の実施態様によれば、ブレーキ圧の減圧に際して減圧速度を減圧途中で変更することにより、ブレーキ圧の減圧速度が大きすぎて車両保持力が急になくなることによる車両の飛び出し感を防止し、かつ、ブレーキ圧の減圧速度が小さすぎることによるブレーキ圧の減圧遅れによる引きずり感を防止することが可能となる。
(2)の実施態様によれば、ブレーキ圧が所定圧より大きい場合は第1の減圧速度でブレーキ圧を減圧して引きずり感を防止し、所定圧以下の場合は第2の減圧速度でブレーキ圧を減圧することで飛び出し感を防止することができる。
【0012】
(3)の実施態様によれば、車両の傾斜角に応じて所定値を変えるので、ブレーキ圧の減圧速度が大きいときに、登坂路で車両保持力が急になくなることによる車両のずり下がりや降坂路で車両保持力が急になくなることによる車両の飛び出しを防止することができる。
(4)の実施態様によれば、車両の自重により車両が動き出したときには、車両が動き出したときの車速に基づいて所定圧を求めるので、ブレーキ圧の減圧速度が大きいときに、登坂路で車両保持力が急になくなることによる車両のずり下がりや降坂路で車両保持力が急になくなることによる車両の飛び出しを防止することができる。
【0013】
(5)の実施態様によれば、アクセル操作された場合には運転者に車両発進の意思があると考えられるので、その場合にはブレーキ圧の減圧速度を大きくして、ブレーキ圧の減圧遅れによる引きずり感を防止することができる。
(6)の実施態様によれば、アクセル開度に基づいてブレーキ圧の減圧速度を求めるので、アクセル開度が大きいときにはブレーキ圧の減圧速度も大きくして、ブレーキの減圧遅れによる引きずり感を防止することができる。
【0014】
(7)の実施態様によれば、傾斜角に基づいてブレーキ圧の減圧速度を求めるので、ブレーキ圧の減圧速度が大きいときに、登坂路で車両保持力が急になくなることによる車両のずり下がりや降坂路で車両保持力が急になくなることによる車両の飛び出しを防止することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の一実施の形態である車両のエンジン再始動制御装置の制御系を示すブロック図である。
【図2】本発明の一実施の形態である車両のエンジン再始動制御装置のブレーキ保持制御のフローチャートである。
【図3】本発明の一実施の形態である車両のエンジン再始動制御装置のエンジン完爆中処理について説明するフローチャートである。
【図4】本発明の一実施の形態である車両のエンジン再始動制御装置の減圧処理について説明するフローチャートである。
【図5】本発明の一実施の形態である車両のエンジン再始動制御装置のエンジン始動中処理について説明するフローチャートである。
【図6】本発明の一実施の形態である車両のエンジン再始動制御装置のアイドルストップ中処理について説明するフローチャートである。
【図7】本発明の一実施の形態である車両のエンジン再始動制御装置のヒルホールド制御について説明するタイミングチャートである。
【図8】本発明の一実施の形態である車両のエンジン再始動制御装置のヒルホールド制御について説明するタイミングチャートである。
【図9】本発明の一実施の形態である車両のエンジン再始動制御装置で目標保持圧を車両の傾斜角に基づいて求めるためのテーブルについて説明するグラフである。
【図10】本発明の一実施の形態である車両のエンジン再始動制御装置で所定圧を車速に基づいて求めるためのテーブルについて説明するグラフである。
【図11】本発明の一実施の形態である車両のエンジン再始動制御装置で所定圧を傾斜角に基づいて求めるためのテーブルについて説明するグラフである。
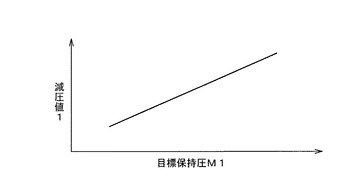
【図12】本発明の一実施の形態である車両のエンジン再始動制御装置で減圧値を目標保持圧に基づいて求めるためのテーブルについて説明するグラフである。
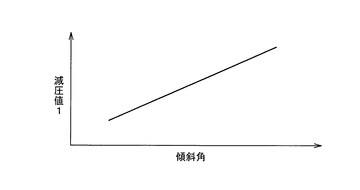
【図13】本発明の一実施の形態である車両のエンジン再始動制御装置で減圧値を車両の傾斜角に基づいて求めるためのテーブルについて説明するグラフである。
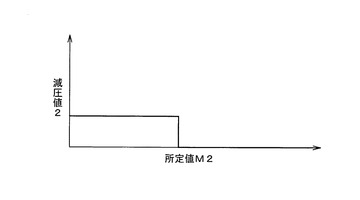
【図14】本発明の一実施の形態である車両のエンジン再始動制御装置で減圧値をブレーキ圧の保持圧に基づいて求めるためのテーブルについて説明するグラフである。
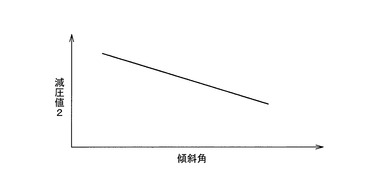
【図15】本発明の一実施の形態である車両のエンジン再始動制御装置で減圧値を車両の傾斜角に基づいて求めるためのテーブルについて説明するグラフである。
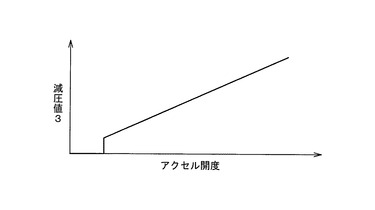
【図16】本発明の一実施の形態である車両のエンジン再始動制御装置で減圧値をアクセル開度に基づいて求めるためのテーブルについて説明するグラフである。
【発明を実施するための形態】
【0016】
以下、本発明の一実施の形態について説明する。
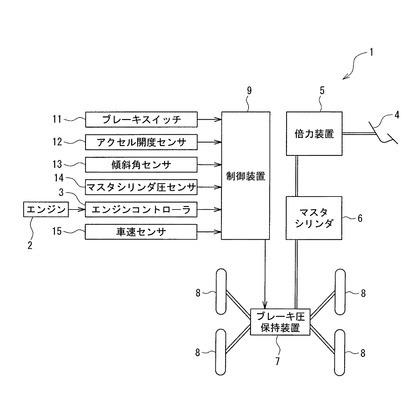
図1は、本発明の一実施の形態である車両1のエンジン再始動制御装置の制御系を示すブロック図である。本実施形態のかかる車両1では、アイドルストップシステムを備えている。アイドルストップシステムは、信号待ちや交通渋滞などで車両1が停止した際に、運転者がイグニッションキーを操作することなくエンジン2を自動停止し、その後、自動でエンジン2を再始動させるシステムである。エンジン2の自動停止の実行は、ブレーキペダル4が踏まれて車両1の速度が0になったこと等、予め定められた自動停止条件を満足するときに行われる。また、エンジン2の再始動の実行は、ブレーキペダル4を解放してアクセルペダル(図示せず)が踏みこまれたこと等、予め定められた再始動条件を満足するときに行われる。これらのアイドルストップシステムの制御は、エンジン2の制御を司るエンジンコントローラ3により行われ、これによりエンジン制御手段を実現している。
【0017】
制御装置9は、車両1のブレーキ系の制御を行う装置であり、マイクロコンピュータを中心に構成されている。ブレーキ系において、ブレーキペダル4の踏力は、倍力装置5を介してマスタシリンダ6に伝達する。マスタシリンダ6にはブレーキ圧保持装置7が接続されている。マスタシリンダ6は、ブレーキペダル4の踏力をブレーキ圧保持装置7に伝える油圧シリンダである。ブレーキ圧保持装置7は所定の油圧回路を備えていて、前後輪8の制動のためのブレーキ圧を作り出す。ブレーキ圧保持装置7は制御装置9と接続されていて、制御装置9により制御される。
【0018】
制御装置9には、ブレーキペダル4が踏まれているか否かを検出するブレーキスイッチ11と、アクセル開度を検出するアクセル開度検出手段となるアクセル開度センサ12と、車両1の傾斜角を検出する傾斜角検出手段となる傾斜角センサ13と、マスタシリンダ6の油圧(マスタシリンダ圧)を検出するマスタシリンダ圧センサ14と、エンジンコントローラ3と、車速を検出する車速検出手段となる車速センサ15とが接続されている。制御装置9は、エンジンコントローラ3からエンジン2の回転数など、エンジン2に関する必要情報を取得することができる。
【0019】
前述のアイドルストップシステムにおいて、制御装置9はヒルホールド制御を行う。ヒルホールド制御では、登坂路等の傾斜している場所でアイドルストップシステムによりエンジン2を停止した場合に、その後のエンジン2の再始動の際に運転者がブレーキペダル4を解放してからアクセルペダルに踏み替えるまでの間、ブレーキ圧を保持して車両1のずり下がりを防止する。すなわち、傾斜角センサ13によりエンジン2の停止した場所が傾斜していると判断すると、ブレーキ圧保持装置7を制御して車両1が傾斜地でもずりさがらないようにブレーキ圧を保持する。すなわち、ブレーキ圧保持装置7は、アイドルストップ中のエンジン2の再始動に際してブレーキペダル4の操作が解除された後もエンジン2の再始動が完了するまでブレーキ圧を保持するブレーキ圧保持手段の機能を有する。より具体的には、マスタシリンダ圧センサ14によりマスタシリンダ圧が予め定められた所定圧以下になったことを検出すると、ブレーキ圧保持装置7はブレーキ圧の保持を開始する。そして、エンジン2が再始動すると、ブレーキ圧を漸次減圧していき、ブレーキを解除する。
【0020】
以下では、ヒルホールド制御によるブレーキ圧の保持について詳細に説明する。
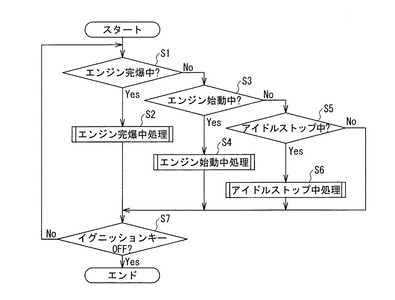
図2は、ブレーキ保持制御のフローチャートである。かかる処理は、イグニッションキーをONにすることにより開始する。まず、エンジン2が完爆中であるか否かを判断する(ステップS1)。エンジン2が完爆中であるか否かは後述するエンジン完爆中フラグがセットされているか否かにより判断する。エンジン2が完爆中であるときは(ステップS1のY)、エンジン完爆中処理(詳細は後述)を行う(ステップS2)。
【0021】
エンジン2が完爆中でないときは(ステップS1のN)、エンジン2が始動中であるか否かを判断する(ステップS3)。エンジン2が始動中であるか否かの判断は後述するエンジン始動中フラグがセットされているか否かにより判断する。エンジン2が始動中であるときは(ステップS3のY)、エンジン始動中処理(詳細は後述)を行う(ステップS4)。
エンジン2が始動中でないときは(ステップS3のN)、前述のアイドルストップシステムによるアイドルストップ中であるか否かを判断する(ステップS5)。アイドルストップ中であるか否かは後述するアイドルストップ中フラグがセットされているか否かにより判断する。アイドルストップ中であるときは(ステップS5のY)、アイドルストップ中処理(詳細は後述)を行う(ステップS6)。
【0022】
エンジン完爆中処理(ステップS2)、エンジン始動中処理(ステップS4)、アイドルストップ中処理(ステップS6)が終了した場合、あるいは、ステップS5の判断でアイドルストップ中でなかった場合は、イグニッションキーがOFFにされない限りは(ステップS7のN)、ステップS1に戻る。イグニッションキーがOFFにされたときは(ステップS7のY)、一連の処理を終了する。
【0023】
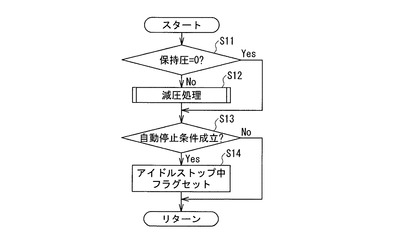
図3は、エンジン完爆中処理(ステップS2)について説明するフローチャートである。まず、ブレーキ圧について現在の保持圧が0か否かを判断する(ステップS11)。保持圧が0でないときは(ステップS11のN)、減圧処理(後述する)を行う(ステップS12)。すなわち、エンジン2が完爆して始動した場合に、ブレーキ圧が未だ0になっておらず、ヒルホールド制御によるブレーキがかかっている状態にある場合には、減圧処理を行うものである。
【0024】
次に、アイドルストップシステムにおける自動停止条件が成立したか否かを判断する(ステップS13)。自動停止条件としては、ブレーキペダル4が踏まれて車両1の速度が0になったこと等が挙げられる。自動停止条件が成立したときは(ステップS13のY)、アイドルストップ中であることを示すアイドルストップ中フラグをセットする(ステップS14)。自動停止条件が成立したときには、エンジンコントローラ3によりエンジン2のアイドルストップが行われる。
【0025】
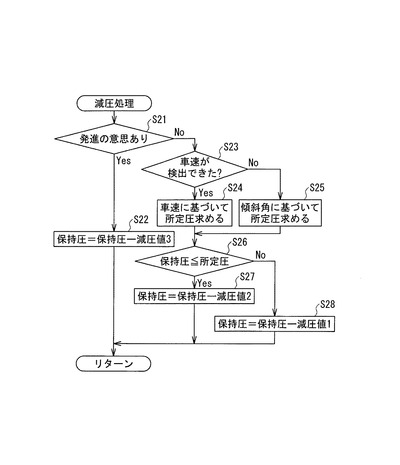
図4は、減圧処理(ステップS12)について説明するフローチャートである。かかる処理では、まず、運転者に車両1を発進させる意思があるか否かを判断する(ステップS21)。運転者に車両1を発進させる意思があるか否かは、アクセル開度センサ12によりアクセルペダルが踏まれているか否かを判断することで行うことができる。
運転者に車両1を発進させる意思があるときは(ステップS21のY)、ブレーキ圧の現在の保持圧から予め定められた減圧値(減圧値3)を減算して、減算後の値を新たな保持圧として設定する(保持圧=保持圧−減圧値3)(ステップS22)。
【0026】
運転者に車両1を発進させる意思がないときは(ステップS21のN)、車速センサ15により車速が検出できたか否かを判断する(ステップS23)。車速を検出できたときは(ステップS23のY)、その車速に基づいて「所定圧」(後述の所定圧M2)を求める(ステップS24)。この所定圧はブレーキ圧の現在の保持圧についての閾値となる値である(後述する)。車速を検出しないときは(ステップS23のN)、傾斜角センサ13で検出する車両1の傾斜角に基づいて「所定圧」を求める(ステップS25)。
【0027】
次に、ブレーキ圧の現在の保持圧と、ステップS24又はS25で求めた所定圧とを比較し(ステップS26)、“保持圧≦所定圧”であるときは(ステップS26のY)、ブレーキ圧の現在の保持圧から予め定められた減圧値(減圧値2)を減算して、減算後の値を新たな保持圧として設定する(保持圧=保持圧−減圧値2)(ステップS27)。
また、“保持圧>所定圧”であるときは(ステップS26のN)、ブレーキ圧の現在の保持圧から予め定められた減圧値(減圧値1)を減算して、減算後の値を新たな保持圧として設定する(保持圧=保持圧−減圧値1)(ステップS28)。
【0028】
ここで、“減圧値3>減圧値1>減圧値2”であり、よって、ステップS22,ステップS27,ステップS28の中では、ブレーキ保持圧の下がり方が最も大きいのは減圧値3を用いるステップS22であり、ブレーキ保持圧の下がり方が最も小さいのは減圧値2を用いるステップS27である。すなわち、図4の処理を繰り返すことにより、ブレーキ保持圧の減圧速度(単位時間当たりの保持圧の下がり方の程度)は、ステップS22,ステップS28,ステップS27の順に大きくなる。
【0029】
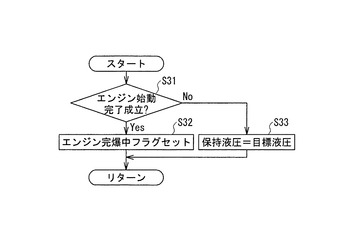
図5は、エンジン始動中処理(ステップS4)について説明するフローチャートである。まず、エンジン2の始動完了条件が成立したか否かを判断する(ステップS31)。エンジンの始動完了条件が成立したか否かは、エンジンの回転数により判断する。一例を挙げれば、エンジン2の回転数の閾値として所定値1,所定値2を用意し、“0<所定値2<所定値1”であるときに、エンジン2の回転数が所定値1以上、又は、エンジンの回転数が所定値2以上且つ予め定められた判定時間経過後、にエンジンの始動完了条件が成立したと判定する。
【0030】
エンジンの始動完了条件が成立したときは(ステップS31のY)、エンジンが完爆中で始動したことを示すエンジン完爆中フラグをセットする(ステップS32)。エンジンの始動完了条件が成立していないときは(ステップS31のN)、ブレーキ圧の保持液圧を目標となる液圧(後述の目標液圧M1)に設定する(ステップS33)。
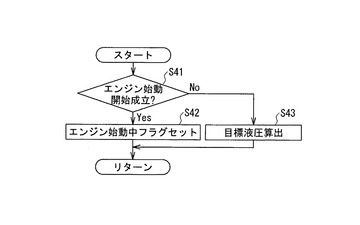
図6は、アイドルストップ中処理(ステップS6)について説明するフローチャートである。まず、所定のエンジン2の始動開始条件が成立しているか否かを、例えば、マスタシリンダ6の圧力等から判断する(ステップS41)。エンジン2の始動開始条件が成立していて、エンジン2の始動が開始していると判断されるときは(ステップS41のY)、エンジン2を始動中であることを示すエンジン始動中フラグをセットする(ステップS42)。エンジン2の始動開始条件が成立しておらず、エンジン2の始動が開始していないと判断されるときは(ステップS41のN)、ブレーキ圧の保持液圧の目標となる液圧(ステップS33で設定する目標液圧M1)を算出する(ステップS43)。
【0031】
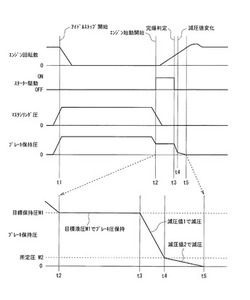
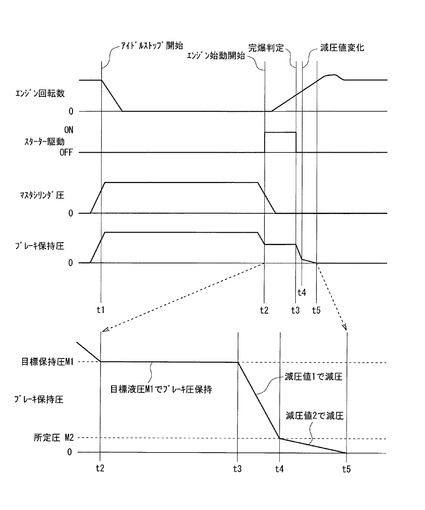
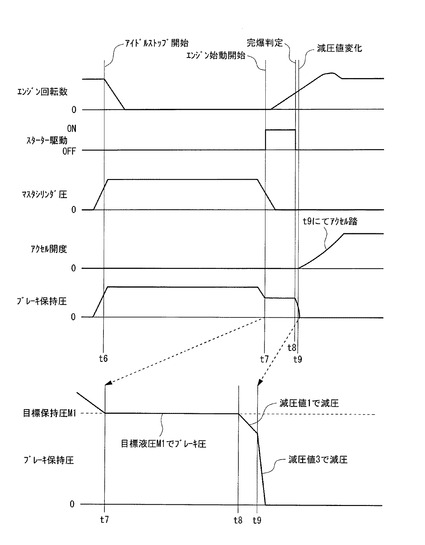
図7、図8は、ヒルホールド制御について説明するタイミングチャートである。図7、図8において、「スターター駆動」は、エンジン2を始動するスターターのON,OFFを示している。また、図7、図8においては、ブレーキ保持圧の一部を拡大表示している。
図7において、まず、時刻t1にエンジン2の自動停止条件(ステップS13)が成立してアイドルストップが開始する。その後、エンジン2の所定の再始動条件が成立し、時刻t2でエンジン2の再始動が開始される。すなわち、エンジン2を始動するスターターがOFFからONに切り替わる。また、エンジン2の再始動の開始に際しては、運転者がブレーキペダル4からアクセルペダルに踏み換えようとするので、マスタシリンダ6のマスタシリンダ圧が0になる。しかし、ヒルホールド制御によってブレーキ保持圧は前述の目標保持圧M1に維持される。
【0032】
その後、時刻t3でエンジン2が完爆し、エンジン2が始動を完了する(ステップS32)。この場合は、エンジン2を始動するスターターがOFFになる。また、そのときのブレーキ保持圧は所定圧M2より大きいので、ステップS28により減圧値1を用いてブレーキ保持圧を減圧していく。その後、時刻t4では、ブレーキ保持圧が所定圧M2まで低下したので、ステップS27により減圧値2を用いてブレーキ保持圧を減圧していく。よって、時刻t3〜t4に比べて時刻t4以後はブレーキ保持圧の減圧速度が緩やかになる。そして時刻t5でブレーキ保持圧が0になって、ヒルホールド制御は終了する。
【0033】
図8が図7と異なる点は、ブレーキ保持圧の減圧中にアクセルペダルを踏んだときの状態を示していることである。すなわち、図8において、まず、時刻t6にエンジン2の自動停止条件(ステップS13)が成立してアイドルストップが開始する。その後、エンジン2の所定の再始動条件が成立し、時刻t7でエンジン2の再始動が開始される。すなわち、エンジン2を始動するスターターがOFFからONに切り替わる。また、エンジン2の再始動の開始においては、運転者がブレーキペダル4からアクセルペダルに踏み換えようとするので、マスタシリンダ6のマスタシリンダ圧が0になる。しかし、ヒルホールド制御によってブレーキ保持圧は前述の目標保持圧M1に維持される。
【0034】
その後、時刻t8でエンジン2が完爆し、エンジン2が始動を完了する(ステップS32)。この場合は、エンジン2を始動するスターターがOFFになる。また、そのときのブレーキ保持圧は所定圧M2より大きいので、ステップS28により減圧値1を用いてブレーキ保持圧を減圧していく。その後、時刻t9では、アクセルペダルが踏まれる。これによって、運転者に車両1を発進させる意思があるか否かを判断されるので(ステップS21のY)、ステップS22により減圧値3を用いてブレーキ保持圧を減圧していく。よって、時刻t8〜t9に比べて時刻t9以後はブレーキ保持圧の減圧速度が急激になる。そして、以後、ブレーキ保持圧が0になって、ヒルホールド制御は終了する。
【0035】
このように、本実施形態のヒルホールド制御においては、エンジン2の再始動が完了して以後はブレーキ圧を漸次減圧していくが、このブレーキ圧の減圧途中に減圧速度を変更することで減圧手段を実現している。なお、前述の減圧値1、減圧値2、目標保持圧M1の値は、アイドルストップ中に求める。また、減圧値1、減圧値2、減圧値3、目標保持圧M1、所定圧M2は、テーブルルックアップにより求める。
【0036】
本実施形態の車両1によれば、図7に示すように、ブレーキ圧が所定圧M2より大きい場合は減圧値1を用いて減圧速度を比較的大きくすることでブレーキ圧を短時間に減圧して車両1の引きずり感を防止し、その後ブレーキ圧が所定圧M2以下になった場合は減圧値2を用いて減圧速度を比較的小さくすることで車両の飛び出し感を防止することができる。
【0037】
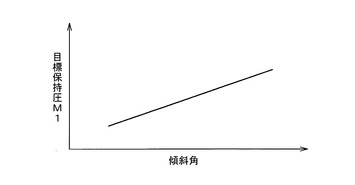
図9は、目標保持圧M1を車両1の傾斜角に基づいて求めるためのテーブルについて説明するグラフである。図9の例では、アイドルストップ中に求める目標保持圧M1は、車両1の傾斜角が大きくなるのに応じて大きくなるように決定する。
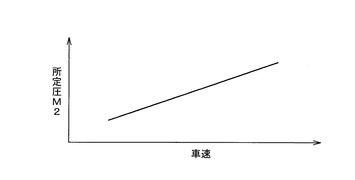
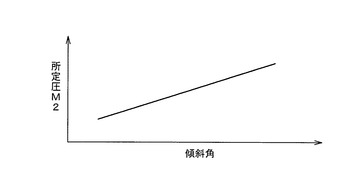
図10は、所定圧M2を車速に基づいて求めるためのテーブルについて説明するグラフである。図11は、所定圧M2を傾斜角に基づいて求めるためのテーブルについて説明するグラフである。すなわち、前述のとおり、車速が検出できたときは(ステップ23のY)、車速に基づいて所定圧M2を求め(ステップ24)、車速が検出できなかったときは(ステップ23のN)、傾斜角に基づいて所定圧M2を求めている(ステップ25)。
【0038】
図11では、車両1の傾斜角が大きいほど所定値M2が大きくなるようにするので(ステップ25)、ブレーキ圧の減圧速度が大きいときに、登坂路で車両保持力が急になくなることによる車両1のずり下がりや降坂路で車両保持力が急になくなることによる車両1の飛び出しを防止することができる。
また、図10では、車両1の自重により車両1が動き出したときには、車両1が動き出したときの車速が大きいほど所定圧M2が大きくなるようにするので(ステップ24)、ブレーキ圧の減圧速度が大きいときに、登坂路で車両保持力が急になくなることによる車両1のずり下がりや降坂路で車両保持力が急になくなることによる車両1の飛び出しを防止することができる。
【0039】
図12は、減圧値1を目標保持圧M1に基づいて求めるためのテーブルについて説明するグラフである。図13は、減圧値1を車両1の傾斜角に基づいて求めるためのテーブルについて説明するグラフである。前述のとおり、減圧値1はアイドルストップ中にテーブルルックアップにより求めるが、この場合に使用するテーブルでは、図12のように目標保持圧M1に基づいて減圧値1を求めてもよいし、図13のように車両1の傾斜角に基づいて減圧値1を求めてもよい。いずれの場合も、目標保持圧M1、傾斜角が大きくなるほど減圧値1も大きくなって、ブレーキ圧の減圧速度が大きくなる。
【0040】
図14は、減圧値2をブレーキ圧の保持圧に基づいて求めるためのテーブルについて説明するグラフである。図15は、減圧値2を車両1の傾斜角に基づいて求めるためのテーブルについて説明するグラフである。前述のとおり、減圧値2はアイドルストップ中にテーブルルックアップにより求めるが、この場合に使用するテーブルでは、図15のように車両1の傾斜角に基づいてブレーキ圧の保持圧が所定値M2以下のときの減圧値2を求める。
【0041】
図14の例では、ブレーキ圧の保持圧が所定圧M2以下になると、減圧値2の値は一定になっている。
図15の例では、車両1の傾斜角の増大に応じて減圧値2の値は減少し、よって、傾斜角が大きいほどブレーキ圧の減圧速度は緩やかになる。この場合は、車両1の傾斜角の増大に応じて減圧値2の値、引いては減圧速度を減少させて、登坂路で車両保持力が急になくなることによる車両1のずり下がりや降坂路で車両保持力が急になくなることによる車両1の飛び出しを防止することができる。
【0042】
図16は、減圧値3をアクセル開度に基づいて求めるためのテーブルについて説明するグラフである。前述のとおり、減圧値3はアイドルストップ中にテーブルルックアップにより求めるが、図16の例ではアクセル開度が大きいほど減圧値3は大きくなり、よって減圧速度も大きくなる。
この場合に、図8に示すように、減圧値3によるブレーキ圧の減圧速度は減圧値1によるブレーキ圧の減圧速度より大きくなる。すなわち、アクセル操作された場合には運転者に車両発進の意思があると考えられるので(ステップS21のY)、その場合にはブレーキ圧の減圧速度を大きくして(ステップS22)、ブレーキ圧の減圧遅れによる引きずり感を防止することができる。
【0043】
また、アクセル開度に基づいてブレーキ圧の減圧速度を決定するので、アクセル開度が大きいときにはブレーキ圧の減圧速度も大きくして、ブレーキの減圧遅れによる引きずり感を防止することができる。
【符号の説明】
【0044】
1 車両
2 エンジン
3 エンジンコントローラ
6 マスタシリンダ
7 ブレーキ圧保持装置
11 ブレーキスイッチ
12 アクセル開度センサ
13 傾斜角センサ
14 マスタシリンダ圧センサ
15 車速センサ
【技術分野】
【0001】
本発明は、予め定められた停止条件を満たしたときは車両のエンジンを停止し、当該停止後に予め定められた再始動条件を満たしたときはエンジンを再始動して、エンジンの再始動に際してブレーキペダルの操作が解除された後もエンジンの再始動が完了するまでブレーキ圧を保持するエンジン再始動制御装置に関する。
【背景技術】
【0002】
特許文献1の技術では、制御ユニットは、ブレーキ液圧保持装置の異常を検知可能な異常検知手段を備え、この異常検知手段によりブレーキ液圧保持装置が異常であると判定した後、自動停止条件のうち傾斜角検知手段により検知された車両の実傾斜角に関する判定値を変更することにより自動停止実行と自動停止禁止との判定条件を変更する。
特許文献2の技術では、エンジン自動停止後、エンジン始動条件が成立したか否か判定され、エンジン始動条件が成立の場合、エンジンに始動指令を送りエンジンを始動させると共に、タービン回転数が600rpmを越えて300rpmを下回るまでヒルホールド制御部がブレーキ液圧を保持する。タービン回転数が300rpmを下回ると、ブレーキ液圧が減圧される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008‐128132公報
【特許文献2】特開2010‐52568公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
アイドルストップシステムは、信号待ちや交通渋滞などで車両が停止した際に、運転者がイグニッションキーを操作することなくエンジンを自動停止し、その後、自動で再始動させるシステムである。
また、ヒルホールド制御は、登坂路等の傾斜している場所でアイドルストップシステムによりエンジンを停止した場合に、その後のエンジンの再始動の際に運転者がブレーキペダルを解放してからアクセルペダルに踏み替えるまでの間、ブレーキ圧を保持して、車両のずり下がりを防止する制御である。このヒルホールド制御では、エンジンの再始動後にブレーキ圧を漸次減圧して0にする。
【0005】
しかしながら、エンジンの再始動後にブレーキ圧を減圧する場合に、特許文献1,2に開示のように一定の減圧速度でブレーキ圧を減圧していくと、減圧速度が速すぎるときは保持圧が一気に減圧されるので、降坂路等では車両の発進時に車両が急に飛び出すような飛び出し感等の違和感を与えてしまう不具合がある。また、減圧速度が遅すぎる場合には車両の発進時にブレーキを引きずるような引きずり感等の違和感を与えてしまう不具合がある。
【0006】
本発明の目的は、車両のエンジンの再始動に際してブレーキペダルの操作が解除された後もエンジンの再始動が完了するまではブレーキ圧を保持する場合に、車両の飛び出し感及びブレーキの引きずり感の防止を図ることである。
【課題を解決するための手段】
【0007】
(1)本発明の一実施態様は、予め定められた停止条件を満たしたときは車両のエンジンを停止し当該停止後に予め定められた再始動条件を満たしたときは前記エンジンを再始動するエンジン制御手段と、前記エンジンの再始動に際してブレーキペダルの操作が解除された後も当該エンジンの再始動が完了するまでブレーキ圧を保持するブレーキ圧保持手段と、を備えているエンジン再始動制御装置において、前記エンジンの再始動が完了して以後は前記ブレーキ圧を漸次減圧し当該ブレーキ圧の減圧に際して減圧速度を減圧途中で変更する減圧手段を備えていることを特徴とするエンジン再始動制御装置である。
【0008】
(2) (1)の実施態様において、前記減圧手段は、前記ブレーキ圧の減圧の際に当該ブレーキ圧が所定圧より大きい場合は第1の減圧速度で当該ブレーキ圧を減圧し前記所定圧以下の場合は前記第1の減圧速度より小さい第2の減圧速度で当該ブレーキ圧を減圧する、ことを特徴とするようにしてもよい。
(3) (2)の実施態様において、車両の車速を検出する車速検出手段と、車両の傾斜角を検出する傾斜角検出手段と、をさらに備え、前記減圧手段は、前記車速検出手段が検出した車速が零であるときに前記傾斜角検出手段で検出された傾斜角に基づいて前記所定圧を求める、ことを特徴とするようにしてもよい。
【0009】
(4) (3)の実施態様において、アクセル開度を検出するアクセル開度検出手段をさらに備え、前記減圧手段は、前記ブレーキ圧を減圧中に前記アクセル開度検出手段によりアクセル操作が検出されていない状態で車速検出手段により車速が検出されたときは当該検出された車速に基づいて前記所定圧を求める、ことを特徴とするようにしてもよい。
(5) (2)の実施態様において、アクセル開度を検出するアクセル開度検出手段をさらに備え、前記減圧手段は、前記ブレーキ圧を減圧中に前記アクセル開度検出手段によりアクセル操作が検出されたときは前記第1の減圧速度より大きい第3の減圧速度で前記ブレーキ圧を減圧する、ことを特徴とするようにしてもよい。
【0010】
(6) (5)の実施態様において、前記減圧手段は、前記アクセル開度検出手段により検出されたアクセル開度に基づいて前記第3の減圧速度を求める、ことを特徴とするようにしてもよい。
(7) (2)の実施態様において、車両の傾斜角を検出する傾斜角検出手段をさらに備え、前記減圧手段は、前記傾斜角検出手段により検出された傾斜角に基づいて前記第2の減圧速度を求める、ことを特徴とするようにしてもよい。
【発明の効果】
【0011】
(1)の実施態様によれば、ブレーキ圧の減圧に際して減圧速度を減圧途中で変更することにより、ブレーキ圧の減圧速度が大きすぎて車両保持力が急になくなることによる車両の飛び出し感を防止し、かつ、ブレーキ圧の減圧速度が小さすぎることによるブレーキ圧の減圧遅れによる引きずり感を防止することが可能となる。
(2)の実施態様によれば、ブレーキ圧が所定圧より大きい場合は第1の減圧速度でブレーキ圧を減圧して引きずり感を防止し、所定圧以下の場合は第2の減圧速度でブレーキ圧を減圧することで飛び出し感を防止することができる。
【0012】
(3)の実施態様によれば、車両の傾斜角に応じて所定値を変えるので、ブレーキ圧の減圧速度が大きいときに、登坂路で車両保持力が急になくなることによる車両のずり下がりや降坂路で車両保持力が急になくなることによる車両の飛び出しを防止することができる。
(4)の実施態様によれば、車両の自重により車両が動き出したときには、車両が動き出したときの車速に基づいて所定圧を求めるので、ブレーキ圧の減圧速度が大きいときに、登坂路で車両保持力が急になくなることによる車両のずり下がりや降坂路で車両保持力が急になくなることによる車両の飛び出しを防止することができる。
【0013】
(5)の実施態様によれば、アクセル操作された場合には運転者に車両発進の意思があると考えられるので、その場合にはブレーキ圧の減圧速度を大きくして、ブレーキ圧の減圧遅れによる引きずり感を防止することができる。
(6)の実施態様によれば、アクセル開度に基づいてブレーキ圧の減圧速度を求めるので、アクセル開度が大きいときにはブレーキ圧の減圧速度も大きくして、ブレーキの減圧遅れによる引きずり感を防止することができる。
【0014】
(7)の実施態様によれば、傾斜角に基づいてブレーキ圧の減圧速度を求めるので、ブレーキ圧の減圧速度が大きいときに、登坂路で車両保持力が急になくなることによる車両のずり下がりや降坂路で車両保持力が急になくなることによる車両の飛び出しを防止することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の一実施の形態である車両のエンジン再始動制御装置の制御系を示すブロック図である。
【図2】本発明の一実施の形態である車両のエンジン再始動制御装置のブレーキ保持制御のフローチャートである。
【図3】本発明の一実施の形態である車両のエンジン再始動制御装置のエンジン完爆中処理について説明するフローチャートである。
【図4】本発明の一実施の形態である車両のエンジン再始動制御装置の減圧処理について説明するフローチャートである。
【図5】本発明の一実施の形態である車両のエンジン再始動制御装置のエンジン始動中処理について説明するフローチャートである。
【図6】本発明の一実施の形態である車両のエンジン再始動制御装置のアイドルストップ中処理について説明するフローチャートである。
【図7】本発明の一実施の形態である車両のエンジン再始動制御装置のヒルホールド制御について説明するタイミングチャートである。
【図8】本発明の一実施の形態である車両のエンジン再始動制御装置のヒルホールド制御について説明するタイミングチャートである。
【図9】本発明の一実施の形態である車両のエンジン再始動制御装置で目標保持圧を車両の傾斜角に基づいて求めるためのテーブルについて説明するグラフである。
【図10】本発明の一実施の形態である車両のエンジン再始動制御装置で所定圧を車速に基づいて求めるためのテーブルについて説明するグラフである。
【図11】本発明の一実施の形態である車両のエンジン再始動制御装置で所定圧を傾斜角に基づいて求めるためのテーブルについて説明するグラフである。
【図12】本発明の一実施の形態である車両のエンジン再始動制御装置で減圧値を目標保持圧に基づいて求めるためのテーブルについて説明するグラフである。
【図13】本発明の一実施の形態である車両のエンジン再始動制御装置で減圧値を車両の傾斜角に基づいて求めるためのテーブルについて説明するグラフである。
【図14】本発明の一実施の形態である車両のエンジン再始動制御装置で減圧値をブレーキ圧の保持圧に基づいて求めるためのテーブルについて説明するグラフである。
【図15】本発明の一実施の形態である車両のエンジン再始動制御装置で減圧値を車両の傾斜角に基づいて求めるためのテーブルについて説明するグラフである。
【図16】本発明の一実施の形態である車両のエンジン再始動制御装置で減圧値をアクセル開度に基づいて求めるためのテーブルについて説明するグラフである。
【発明を実施するための形態】
【0016】
以下、本発明の一実施の形態について説明する。
図1は、本発明の一実施の形態である車両1のエンジン再始動制御装置の制御系を示すブロック図である。本実施形態のかかる車両1では、アイドルストップシステムを備えている。アイドルストップシステムは、信号待ちや交通渋滞などで車両1が停止した際に、運転者がイグニッションキーを操作することなくエンジン2を自動停止し、その後、自動でエンジン2を再始動させるシステムである。エンジン2の自動停止の実行は、ブレーキペダル4が踏まれて車両1の速度が0になったこと等、予め定められた自動停止条件を満足するときに行われる。また、エンジン2の再始動の実行は、ブレーキペダル4を解放してアクセルペダル(図示せず)が踏みこまれたこと等、予め定められた再始動条件を満足するときに行われる。これらのアイドルストップシステムの制御は、エンジン2の制御を司るエンジンコントローラ3により行われ、これによりエンジン制御手段を実現している。
【0017】
制御装置9は、車両1のブレーキ系の制御を行う装置であり、マイクロコンピュータを中心に構成されている。ブレーキ系において、ブレーキペダル4の踏力は、倍力装置5を介してマスタシリンダ6に伝達する。マスタシリンダ6にはブレーキ圧保持装置7が接続されている。マスタシリンダ6は、ブレーキペダル4の踏力をブレーキ圧保持装置7に伝える油圧シリンダである。ブレーキ圧保持装置7は所定の油圧回路を備えていて、前後輪8の制動のためのブレーキ圧を作り出す。ブレーキ圧保持装置7は制御装置9と接続されていて、制御装置9により制御される。
【0018】
制御装置9には、ブレーキペダル4が踏まれているか否かを検出するブレーキスイッチ11と、アクセル開度を検出するアクセル開度検出手段となるアクセル開度センサ12と、車両1の傾斜角を検出する傾斜角検出手段となる傾斜角センサ13と、マスタシリンダ6の油圧(マスタシリンダ圧)を検出するマスタシリンダ圧センサ14と、エンジンコントローラ3と、車速を検出する車速検出手段となる車速センサ15とが接続されている。制御装置9は、エンジンコントローラ3からエンジン2の回転数など、エンジン2に関する必要情報を取得することができる。
【0019】
前述のアイドルストップシステムにおいて、制御装置9はヒルホールド制御を行う。ヒルホールド制御では、登坂路等の傾斜している場所でアイドルストップシステムによりエンジン2を停止した場合に、その後のエンジン2の再始動の際に運転者がブレーキペダル4を解放してからアクセルペダルに踏み替えるまでの間、ブレーキ圧を保持して車両1のずり下がりを防止する。すなわち、傾斜角センサ13によりエンジン2の停止した場所が傾斜していると判断すると、ブレーキ圧保持装置7を制御して車両1が傾斜地でもずりさがらないようにブレーキ圧を保持する。すなわち、ブレーキ圧保持装置7は、アイドルストップ中のエンジン2の再始動に際してブレーキペダル4の操作が解除された後もエンジン2の再始動が完了するまでブレーキ圧を保持するブレーキ圧保持手段の機能を有する。より具体的には、マスタシリンダ圧センサ14によりマスタシリンダ圧が予め定められた所定圧以下になったことを検出すると、ブレーキ圧保持装置7はブレーキ圧の保持を開始する。そして、エンジン2が再始動すると、ブレーキ圧を漸次減圧していき、ブレーキを解除する。
【0020】
以下では、ヒルホールド制御によるブレーキ圧の保持について詳細に説明する。
図2は、ブレーキ保持制御のフローチャートである。かかる処理は、イグニッションキーをONにすることにより開始する。まず、エンジン2が完爆中であるか否かを判断する(ステップS1)。エンジン2が完爆中であるか否かは後述するエンジン完爆中フラグがセットされているか否かにより判断する。エンジン2が完爆中であるときは(ステップS1のY)、エンジン完爆中処理(詳細は後述)を行う(ステップS2)。
【0021】
エンジン2が完爆中でないときは(ステップS1のN)、エンジン2が始動中であるか否かを判断する(ステップS3)。エンジン2が始動中であるか否かの判断は後述するエンジン始動中フラグがセットされているか否かにより判断する。エンジン2が始動中であるときは(ステップS3のY)、エンジン始動中処理(詳細は後述)を行う(ステップS4)。
エンジン2が始動中でないときは(ステップS3のN)、前述のアイドルストップシステムによるアイドルストップ中であるか否かを判断する(ステップS5)。アイドルストップ中であるか否かは後述するアイドルストップ中フラグがセットされているか否かにより判断する。アイドルストップ中であるときは(ステップS5のY)、アイドルストップ中処理(詳細は後述)を行う(ステップS6)。
【0022】
エンジン完爆中処理(ステップS2)、エンジン始動中処理(ステップS4)、アイドルストップ中処理(ステップS6)が終了した場合、あるいは、ステップS5の判断でアイドルストップ中でなかった場合は、イグニッションキーがOFFにされない限りは(ステップS7のN)、ステップS1に戻る。イグニッションキーがOFFにされたときは(ステップS7のY)、一連の処理を終了する。
【0023】
図3は、エンジン完爆中処理(ステップS2)について説明するフローチャートである。まず、ブレーキ圧について現在の保持圧が0か否かを判断する(ステップS11)。保持圧が0でないときは(ステップS11のN)、減圧処理(後述する)を行う(ステップS12)。すなわち、エンジン2が完爆して始動した場合に、ブレーキ圧が未だ0になっておらず、ヒルホールド制御によるブレーキがかかっている状態にある場合には、減圧処理を行うものである。
【0024】
次に、アイドルストップシステムにおける自動停止条件が成立したか否かを判断する(ステップS13)。自動停止条件としては、ブレーキペダル4が踏まれて車両1の速度が0になったこと等が挙げられる。自動停止条件が成立したときは(ステップS13のY)、アイドルストップ中であることを示すアイドルストップ中フラグをセットする(ステップS14)。自動停止条件が成立したときには、エンジンコントローラ3によりエンジン2のアイドルストップが行われる。
【0025】
図4は、減圧処理(ステップS12)について説明するフローチャートである。かかる処理では、まず、運転者に車両1を発進させる意思があるか否かを判断する(ステップS21)。運転者に車両1を発進させる意思があるか否かは、アクセル開度センサ12によりアクセルペダルが踏まれているか否かを判断することで行うことができる。
運転者に車両1を発進させる意思があるときは(ステップS21のY)、ブレーキ圧の現在の保持圧から予め定められた減圧値(減圧値3)を減算して、減算後の値を新たな保持圧として設定する(保持圧=保持圧−減圧値3)(ステップS22)。
【0026】
運転者に車両1を発進させる意思がないときは(ステップS21のN)、車速センサ15により車速が検出できたか否かを判断する(ステップS23)。車速を検出できたときは(ステップS23のY)、その車速に基づいて「所定圧」(後述の所定圧M2)を求める(ステップS24)。この所定圧はブレーキ圧の現在の保持圧についての閾値となる値である(後述する)。車速を検出しないときは(ステップS23のN)、傾斜角センサ13で検出する車両1の傾斜角に基づいて「所定圧」を求める(ステップS25)。
【0027】
次に、ブレーキ圧の現在の保持圧と、ステップS24又はS25で求めた所定圧とを比較し(ステップS26)、“保持圧≦所定圧”であるときは(ステップS26のY)、ブレーキ圧の現在の保持圧から予め定められた減圧値(減圧値2)を減算して、減算後の値を新たな保持圧として設定する(保持圧=保持圧−減圧値2)(ステップS27)。
また、“保持圧>所定圧”であるときは(ステップS26のN)、ブレーキ圧の現在の保持圧から予め定められた減圧値(減圧値1)を減算して、減算後の値を新たな保持圧として設定する(保持圧=保持圧−減圧値1)(ステップS28)。
【0028】
ここで、“減圧値3>減圧値1>減圧値2”であり、よって、ステップS22,ステップS27,ステップS28の中では、ブレーキ保持圧の下がり方が最も大きいのは減圧値3を用いるステップS22であり、ブレーキ保持圧の下がり方が最も小さいのは減圧値2を用いるステップS27である。すなわち、図4の処理を繰り返すことにより、ブレーキ保持圧の減圧速度(単位時間当たりの保持圧の下がり方の程度)は、ステップS22,ステップS28,ステップS27の順に大きくなる。
【0029】
図5は、エンジン始動中処理(ステップS4)について説明するフローチャートである。まず、エンジン2の始動完了条件が成立したか否かを判断する(ステップS31)。エンジンの始動完了条件が成立したか否かは、エンジンの回転数により判断する。一例を挙げれば、エンジン2の回転数の閾値として所定値1,所定値2を用意し、“0<所定値2<所定値1”であるときに、エンジン2の回転数が所定値1以上、又は、エンジンの回転数が所定値2以上且つ予め定められた判定時間経過後、にエンジンの始動完了条件が成立したと判定する。
【0030】
エンジンの始動完了条件が成立したときは(ステップS31のY)、エンジンが完爆中で始動したことを示すエンジン完爆中フラグをセットする(ステップS32)。エンジンの始動完了条件が成立していないときは(ステップS31のN)、ブレーキ圧の保持液圧を目標となる液圧(後述の目標液圧M1)に設定する(ステップS33)。
図6は、アイドルストップ中処理(ステップS6)について説明するフローチャートである。まず、所定のエンジン2の始動開始条件が成立しているか否かを、例えば、マスタシリンダ6の圧力等から判断する(ステップS41)。エンジン2の始動開始条件が成立していて、エンジン2の始動が開始していると判断されるときは(ステップS41のY)、エンジン2を始動中であることを示すエンジン始動中フラグをセットする(ステップS42)。エンジン2の始動開始条件が成立しておらず、エンジン2の始動が開始していないと判断されるときは(ステップS41のN)、ブレーキ圧の保持液圧の目標となる液圧(ステップS33で設定する目標液圧M1)を算出する(ステップS43)。
【0031】
図7、図8は、ヒルホールド制御について説明するタイミングチャートである。図7、図8において、「スターター駆動」は、エンジン2を始動するスターターのON,OFFを示している。また、図7、図8においては、ブレーキ保持圧の一部を拡大表示している。
図7において、まず、時刻t1にエンジン2の自動停止条件(ステップS13)が成立してアイドルストップが開始する。その後、エンジン2の所定の再始動条件が成立し、時刻t2でエンジン2の再始動が開始される。すなわち、エンジン2を始動するスターターがOFFからONに切り替わる。また、エンジン2の再始動の開始に際しては、運転者がブレーキペダル4からアクセルペダルに踏み換えようとするので、マスタシリンダ6のマスタシリンダ圧が0になる。しかし、ヒルホールド制御によってブレーキ保持圧は前述の目標保持圧M1に維持される。
【0032】
その後、時刻t3でエンジン2が完爆し、エンジン2が始動を完了する(ステップS32)。この場合は、エンジン2を始動するスターターがOFFになる。また、そのときのブレーキ保持圧は所定圧M2より大きいので、ステップS28により減圧値1を用いてブレーキ保持圧を減圧していく。その後、時刻t4では、ブレーキ保持圧が所定圧M2まで低下したので、ステップS27により減圧値2を用いてブレーキ保持圧を減圧していく。よって、時刻t3〜t4に比べて時刻t4以後はブレーキ保持圧の減圧速度が緩やかになる。そして時刻t5でブレーキ保持圧が0になって、ヒルホールド制御は終了する。
【0033】
図8が図7と異なる点は、ブレーキ保持圧の減圧中にアクセルペダルを踏んだときの状態を示していることである。すなわち、図8において、まず、時刻t6にエンジン2の自動停止条件(ステップS13)が成立してアイドルストップが開始する。その後、エンジン2の所定の再始動条件が成立し、時刻t7でエンジン2の再始動が開始される。すなわち、エンジン2を始動するスターターがOFFからONに切り替わる。また、エンジン2の再始動の開始においては、運転者がブレーキペダル4からアクセルペダルに踏み換えようとするので、マスタシリンダ6のマスタシリンダ圧が0になる。しかし、ヒルホールド制御によってブレーキ保持圧は前述の目標保持圧M1に維持される。
【0034】
その後、時刻t8でエンジン2が完爆し、エンジン2が始動を完了する(ステップS32)。この場合は、エンジン2を始動するスターターがOFFになる。また、そのときのブレーキ保持圧は所定圧M2より大きいので、ステップS28により減圧値1を用いてブレーキ保持圧を減圧していく。その後、時刻t9では、アクセルペダルが踏まれる。これによって、運転者に車両1を発進させる意思があるか否かを判断されるので(ステップS21のY)、ステップS22により減圧値3を用いてブレーキ保持圧を減圧していく。よって、時刻t8〜t9に比べて時刻t9以後はブレーキ保持圧の減圧速度が急激になる。そして、以後、ブレーキ保持圧が0になって、ヒルホールド制御は終了する。
【0035】
このように、本実施形態のヒルホールド制御においては、エンジン2の再始動が完了して以後はブレーキ圧を漸次減圧していくが、このブレーキ圧の減圧途中に減圧速度を変更することで減圧手段を実現している。なお、前述の減圧値1、減圧値2、目標保持圧M1の値は、アイドルストップ中に求める。また、減圧値1、減圧値2、減圧値3、目標保持圧M1、所定圧M2は、テーブルルックアップにより求める。
【0036】
本実施形態の車両1によれば、図7に示すように、ブレーキ圧が所定圧M2より大きい場合は減圧値1を用いて減圧速度を比較的大きくすることでブレーキ圧を短時間に減圧して車両1の引きずり感を防止し、その後ブレーキ圧が所定圧M2以下になった場合は減圧値2を用いて減圧速度を比較的小さくすることで車両の飛び出し感を防止することができる。
【0037】
図9は、目標保持圧M1を車両1の傾斜角に基づいて求めるためのテーブルについて説明するグラフである。図9の例では、アイドルストップ中に求める目標保持圧M1は、車両1の傾斜角が大きくなるのに応じて大きくなるように決定する。
図10は、所定圧M2を車速に基づいて求めるためのテーブルについて説明するグラフである。図11は、所定圧M2を傾斜角に基づいて求めるためのテーブルについて説明するグラフである。すなわち、前述のとおり、車速が検出できたときは(ステップ23のY)、車速に基づいて所定圧M2を求め(ステップ24)、車速が検出できなかったときは(ステップ23のN)、傾斜角に基づいて所定圧M2を求めている(ステップ25)。
【0038】
図11では、車両1の傾斜角が大きいほど所定値M2が大きくなるようにするので(ステップ25)、ブレーキ圧の減圧速度が大きいときに、登坂路で車両保持力が急になくなることによる車両1のずり下がりや降坂路で車両保持力が急になくなることによる車両1の飛び出しを防止することができる。
また、図10では、車両1の自重により車両1が動き出したときには、車両1が動き出したときの車速が大きいほど所定圧M2が大きくなるようにするので(ステップ24)、ブレーキ圧の減圧速度が大きいときに、登坂路で車両保持力が急になくなることによる車両1のずり下がりや降坂路で車両保持力が急になくなることによる車両1の飛び出しを防止することができる。
【0039】
図12は、減圧値1を目標保持圧M1に基づいて求めるためのテーブルについて説明するグラフである。図13は、減圧値1を車両1の傾斜角に基づいて求めるためのテーブルについて説明するグラフである。前述のとおり、減圧値1はアイドルストップ中にテーブルルックアップにより求めるが、この場合に使用するテーブルでは、図12のように目標保持圧M1に基づいて減圧値1を求めてもよいし、図13のように車両1の傾斜角に基づいて減圧値1を求めてもよい。いずれの場合も、目標保持圧M1、傾斜角が大きくなるほど減圧値1も大きくなって、ブレーキ圧の減圧速度が大きくなる。
【0040】
図14は、減圧値2をブレーキ圧の保持圧に基づいて求めるためのテーブルについて説明するグラフである。図15は、減圧値2を車両1の傾斜角に基づいて求めるためのテーブルについて説明するグラフである。前述のとおり、減圧値2はアイドルストップ中にテーブルルックアップにより求めるが、この場合に使用するテーブルでは、図15のように車両1の傾斜角に基づいてブレーキ圧の保持圧が所定値M2以下のときの減圧値2を求める。
【0041】
図14の例では、ブレーキ圧の保持圧が所定圧M2以下になると、減圧値2の値は一定になっている。
図15の例では、車両1の傾斜角の増大に応じて減圧値2の値は減少し、よって、傾斜角が大きいほどブレーキ圧の減圧速度は緩やかになる。この場合は、車両1の傾斜角の増大に応じて減圧値2の値、引いては減圧速度を減少させて、登坂路で車両保持力が急になくなることによる車両1のずり下がりや降坂路で車両保持力が急になくなることによる車両1の飛び出しを防止することができる。
【0042】
図16は、減圧値3をアクセル開度に基づいて求めるためのテーブルについて説明するグラフである。前述のとおり、減圧値3はアイドルストップ中にテーブルルックアップにより求めるが、図16の例ではアクセル開度が大きいほど減圧値3は大きくなり、よって減圧速度も大きくなる。
この場合に、図8に示すように、減圧値3によるブレーキ圧の減圧速度は減圧値1によるブレーキ圧の減圧速度より大きくなる。すなわち、アクセル操作された場合には運転者に車両発進の意思があると考えられるので(ステップS21のY)、その場合にはブレーキ圧の減圧速度を大きくして(ステップS22)、ブレーキ圧の減圧遅れによる引きずり感を防止することができる。
【0043】
また、アクセル開度に基づいてブレーキ圧の減圧速度を決定するので、アクセル開度が大きいときにはブレーキ圧の減圧速度も大きくして、ブレーキの減圧遅れによる引きずり感を防止することができる。
【符号の説明】
【0044】
1 車両
2 エンジン
3 エンジンコントローラ
6 マスタシリンダ
7 ブレーキ圧保持装置
11 ブレーキスイッチ
12 アクセル開度センサ
13 傾斜角センサ
14 マスタシリンダ圧センサ
15 車速センサ
【特許請求の範囲】
【請求項1】
予め定められた停止条件を満たしたときは車両のエンジンを停止し当該停止後に予め定められた再始動条件を満たしたときは前記エンジンを再始動するエンジン制御手段と、
前記エンジンの再始動に際してブレーキペダルの操作が解除された後も当該エンジンの再始動が完了するまでブレーキ圧を保持するブレーキ圧保持手段と、
を備えているエンジン再始動制御装置において、
前記エンジンの再始動が完了して以後は前記ブレーキ圧を漸次減圧し当該ブレーキ圧の減圧に際して減圧速度を減圧途中で変更する減圧手段を備えていることを特徴とするエンジン再始動制御装置。
【請求項2】
前記減圧手段は、前記ブレーキ圧の減圧の際に当該ブレーキ圧が所定圧より大きい場合は第1の減圧速度で当該ブレーキ圧を減圧し前記所定圧以下の場合は前記第1の減圧速度より小さい第2の減圧速度で当該ブレーキ圧を減圧する、ことを特徴とする請求項1に記載のエンジン再始動制御装置。
【請求項3】
車両の車速を検出する車速検出手段と、
車両の傾斜角を検出する傾斜角検出手段と、
をさらに備え、
前記減圧手段は、前記車速検出手段が検出した車速が零であるときに前記傾斜角検出手段で検出された傾斜角に基づいて前記所定圧を求める、
ことを特徴とする請求項2に記載のエンジン再始動制御装置。
【請求項4】
アクセル開度を検出するアクセル開度検出手段をさらに備え、
前記減圧手段は、前記ブレーキ圧を減圧中に前記アクセル開度検出手段によりアクセル操作が検出されていない状態で前記車速検出手段により車速が検出されたときは当該検出された車速に基づいて前記所定圧を求める、
ことを特徴とする請求項3に記載のエンジン再始動制御装置。
【請求項5】
アクセル開度を検出するアクセル開度検出手段をさらに備え、
前記減圧手段は、前記ブレーキ圧を減圧中に前記アクセル開度検出手段によりアクセル操作が検出されたときは前記第1の減圧速度より大きい第3の減圧速度で前記ブレーキ圧を減圧する、
ことを特徴とする請求項2に記載のエンジン再始動制御装置。
【請求項6】
前記減圧手段は、前記アクセル開度検出手段により検出されたアクセル開度に基づいて前記第3の減圧速度を求める、ことを特徴とする請求項5に記載のエンジン再始動制御装置。
【請求項7】
車両の傾斜角を検出する傾斜角検出手段をさらに備え、
前記減圧手段は、前記傾斜角検出手段により検出された傾斜角に基づいて前記第2の減圧速度を求める、
ことを特徴とする請求項2に記載のエンジン再始動制御装置。
【請求項1】
予め定められた停止条件を満たしたときは車両のエンジンを停止し当該停止後に予め定められた再始動条件を満たしたときは前記エンジンを再始動するエンジン制御手段と、
前記エンジンの再始動に際してブレーキペダルの操作が解除された後も当該エンジンの再始動が完了するまでブレーキ圧を保持するブレーキ圧保持手段と、
を備えているエンジン再始動制御装置において、
前記エンジンの再始動が完了して以後は前記ブレーキ圧を漸次減圧し当該ブレーキ圧の減圧に際して減圧速度を減圧途中で変更する減圧手段を備えていることを特徴とするエンジン再始動制御装置。
【請求項2】
前記減圧手段は、前記ブレーキ圧の減圧の際に当該ブレーキ圧が所定圧より大きい場合は第1の減圧速度で当該ブレーキ圧を減圧し前記所定圧以下の場合は前記第1の減圧速度より小さい第2の減圧速度で当該ブレーキ圧を減圧する、ことを特徴とする請求項1に記載のエンジン再始動制御装置。
【請求項3】
車両の車速を検出する車速検出手段と、
車両の傾斜角を検出する傾斜角検出手段と、
をさらに備え、
前記減圧手段は、前記車速検出手段が検出した車速が零であるときに前記傾斜角検出手段で検出された傾斜角に基づいて前記所定圧を求める、
ことを特徴とする請求項2に記載のエンジン再始動制御装置。
【請求項4】
アクセル開度を検出するアクセル開度検出手段をさらに備え、
前記減圧手段は、前記ブレーキ圧を減圧中に前記アクセル開度検出手段によりアクセル操作が検出されていない状態で前記車速検出手段により車速が検出されたときは当該検出された車速に基づいて前記所定圧を求める、
ことを特徴とする請求項3に記載のエンジン再始動制御装置。
【請求項5】
アクセル開度を検出するアクセル開度検出手段をさらに備え、
前記減圧手段は、前記ブレーキ圧を減圧中に前記アクセル開度検出手段によりアクセル操作が検出されたときは前記第1の減圧速度より大きい第3の減圧速度で前記ブレーキ圧を減圧する、
ことを特徴とする請求項2に記載のエンジン再始動制御装置。
【請求項6】
前記減圧手段は、前記アクセル開度検出手段により検出されたアクセル開度に基づいて前記第3の減圧速度を求める、ことを特徴とする請求項5に記載のエンジン再始動制御装置。
【請求項7】
車両の傾斜角を検出する傾斜角検出手段をさらに備え、
前記減圧手段は、前記傾斜角検出手段により検出された傾斜角に基づいて前記第2の減圧速度を求める、
ことを特徴とする請求項2に記載のエンジン再始動制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2013−71472(P2013−71472A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−209626(P2011−209626)
【出願日】平成23年9月26日(2011.9.26)
【出願人】(000002082)スズキ株式会社 (3,196)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月26日(2011.9.26)
【出願人】(000002082)スズキ株式会社 (3,196)
【Fターム(参考)】
[ Back to top ]