
エンジン制御装置
【課題】従来の2台のエンジンを制御する制御装置は、信頼性を高めるために4組のセンサ、アクチュエータ及び処理装置を備えており、処理装置は容積が大きく、重量も大きく、製造や維持にかかる費用も大きいという問題があった。
【解決手段】4組のセンサ、アクチュエータと2台の処理装置を備え、通常時は、2台のエンジンに各々2個設けられたセンサからの計測値を基に各エンジンの制御量が、2台の処理装置で演算される。演算された制御量から、第1の処理装置にて第1のエンジンを制御し、第2の処理装置にて第2のエンジンを制御する。第1の処理装置にて故障が発生した場合、第2の処理装置はそれを検知する。演算された制御量から、第2の処理装置が、第1のエンジン及び第2のエンジンを制御する。
【解決手段】4組のセンサ、アクチュエータと2台の処理装置を備え、通常時は、2台のエンジンに各々2個設けられたセンサからの計測値を基に各エンジンの制御量が、2台の処理装置で演算される。演算された制御量から、第1の処理装置にて第1のエンジンを制御し、第2の処理装置にて第2のエンジンを制御する。第1の処理装置にて故障が発生した場合、第2の処理装置はそれを検知する。演算された制御量から、第2の処理装置が、第1のエンジン及び第2のエンジンを制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、2台のエンジンを制御する場合のエンジン制御装置に関する。
【背景技術】
【0002】
従来、2台のエンジンを持つ航空機のエンジンを制御する場合、エンジンごとに取り付けられたエンジン制御装置が、対応するエンジンのみを専属で制御する。
各エンジン制御装置内は、制御系統が2重に設けられた冗長構成をなし、各制御系統が通信装置、中央処理装置、入出力装置などを持つ。
通常は2系統の制御系統のうち片側がエンジン制御を担当し、制御を担当している制御系統のどこかの装置で故障が発生した場合、制御を担当する制御系統を別の系統に切り換えることで、その制御装置に対応するエンジンの制御を続行する。
【0003】
つまり、制御装置が2系統の冗長構成であることによって、ある1つの装置が故障してもエンジン制御を続行可能にして高信頼性を実現している(例えば、特許文献1参照。)。
【0004】
【特許文献1】特開平5−12048号公報(第1頁〔請求項1〕4−10行目、第2頁、第7頁〔図1〕、第8頁〔図3〕)
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の制御装置は、冗長構成になっているために、制御装置を構成する部品数が多い。
即ち、2台のエンジン用の制御装置の場合、エンジンからのセンサの計測値を受信してエンジンの制御量を演算するための制御装置が合計4台必要となる。
この計測値を受信してエンジンの制御量を演算するための制御装置は容積が大きく、重量も大きく、製造や維持にかかる費用も大きい。
また故障箇所を特定することや、修理することを考慮すると部品数が少ない方が管理もしやすい。
【0006】
従って、制御装置の重量を軽くし、容積を小さく抑え、管理を容易にし、製造・維持費用を安くするために、部品数を減らすことが望ましい。
そこで、近年品質が向上し、中央処理装置が故障しにくいものとなってきた背景から、例えば、各エンジン制御装置内の中央処理装置の台数を1つに減らすことが考えられる。
しかし、各エンジン制御装置が専属でエンジンを制御する従来のような場合、中央処理装置が故障すると、直ちにその中央処理装置を含む制御装置が、対応するエンジンを制御できない状態になる。
その結果、乗務員による手動制御もしくは最悪の場合エンジン停止に追い込まれ、高信頼性を実現することができない。
【0007】
また、中央処理装置ではなく、エンジン制御装置自体の台数を減らして、1つの冗長構成のエンジン制御装置が常に2台のエンジン制御を行うことが考えられる。
しかし、この場合もやはり、制御装置が万が一攻撃を受けて制御できない状態になった時点で一度に2台のエンジンが制御できなくなり、高信頼性を実現することができない。
そこで本発明の目的は、部品数を減らしつつ、高信頼性を維持できるエンジン制御装置を提供することにある。
【課題を解決するための手段】
【0008】
本発明は、上記従来の課題を解決するためになされたもので、特許請求の範囲に記載された各発明は、エンジン制御装置として、それぞれ以下に述べる各手段を採用したものである。
【0009】
(1)第1の手段のエンジン制御装置は、第1のエンジン及び第2のエンジンと、第1のエンジンに設けられた第1のA系センサ、第1のB系センサ、第1のA系アクチュエータ及び第1のB系アクチュエータと、第1のA系センサ及び第1のA系アクチュエータに接続された第1のA系入出力装置と、第1のA系入出力装置を介して第1のA系センサから計測値を入力すると共に第1のA系アクチュエータの制御量を演算し制御する第1の処理装置と、第1の処理装置に接続された第1のA系通信装置と、第1のB系センサ及び第1のB系アクチュエータに接続された第1のB系入出力装置と、第1のB系入出力装置に接続された第1のB系通信装置と、第1のA系通信装置と第1のB系通信装置とを接続する第1の内部ネットワーク信号線と、第2のエンジンに設けられた第2のA系センサ、第2のB系センサ、第2のA系アクチュエータ及び第2のB系アクチュエータと、第2のA系センサ及び第2のA系アクチュエータに接続された第2のA系入出力装置と、第2のA系入出力装置を介して第2のA系センサから計測値を入力すると共に第2のA系アクチュエータの制御量を演算し制御する第2の処理装置と、第2の処理装置に接続された第2のA系通信装置と、第2のB系センサ及び第2のB系アクチュエータに接続された第2のB系入出力装置と、第2のB系入出力装置に接続された第2のB系通信装置と、第2のA系通信装置と第2のB系通信装置とを接続する第2の内部ネットワーク信号線と、第1のA系通信装置と第2のB系通信装置又は第2のA系通信装置とを接続する第1の外部ネットワーク信号線と、第1のB系通信装置と第2のA系通信装置又は第2のB系通信装置とを接続する第2の外部ネットワーク信号線と、第1の外部ネットワーク信号線及び第2の外部ネットワーク信号線に接続された外部指令表示装置とを備えたことを特徴とする。
【0010】
(2)第2の手段のエンジン制御装置は、第1の手段において、第1の処理装置は、第1のB系入出力装置、第1のB系通信装置及び第1のA系通信装置を介して第1のB系センサから計測値を入力すると共に第1のB系アクチュエータの制御量を演算し制御し、第2の処理装置は、第2のB系入出力装置、第2のB系通信装置及び第2のA系通信装置を介して第2のB系センサから計測値を入力すると共に第2のB系アクチュエータの制御量を演算し制御するものであることを特徴とする。
【0011】
(3)第3の手段のエンジン制御装置は、第1又は2の手段において、第1のA系センサ及び第1のB系センサからの計測値は、第1の外部ネットワーク信号線及び第2の外部ネットワーク信号線を介して第2の処理装置にも送信され、第2のA系センサ及び第2のB系センサからの計測値は、第1の外部ネットワーク信号線及び第2の外部ネットワーク信号線を介して第1の処理装置にも送信されると共に、第1の処理装置及び第2の処理装置は、第1のA系アクチュエータ、第1のB系アクチュエータ、第2のA系アクチュエータ及び第2のB系アクチュエータの制御量を演算するものであることを特徴とする。
【0012】
(4)第4の手段のエンジン制御装置は、第3の手段において、第1の処理装置及び第2の処理装置は、第1の外部ネットワーク信号線を介して送信された計測値と第2の外部ネットワーク信号線を介して送信された計測値とを比較し、第1の外部ネットワーク信号線又は第2の外部ネットワーク信号線の故障の有無を判断するものであることを特徴とする。
【0013】
(5)第5の手段のエンジン制御装置は、第3又は4の手段において、第1の処理装置及び第2の処理装置は、計測値が第1の外部ネットワーク信号線及び第2の外部ネットワーク信号線を介して送信しないときに送信元の第1の処理装置又は第2の処理装置が故障していると判断するものであることを特徴とする。
【0014】
(6)第6の手段のエンジン制御装置は、第5の手段において、第1の処理装置は、第2のB系入出力装置、第2のB系通信装置及び第1のA系通信装置を介して第2のB系センサから計測値を入力すると共に第2のB系アクチュエータの制御量を演算し制御し、第2の処理装置は、第1のB系入出力装置、第1のB系通信装置及び第2のA系通信装置を介して第1のB系センサから計測値を入力すると共に第1のB系アクチュエータの制御量を演算し制御するものであることを特徴とする。
【発明の効果】
【0015】
上述したように本発明のエンジン制御装置は、2台のエンジンの制御系統が、各々2重に設けられた冗長構成をなしているにも係わらず、センサからの計測値に基づいてアクチュエータの制御量を演算する処理装置は各々1台のみであり、制御装置製造費用の削減、制御装置重量の軽減、制御装置の小型化を実現することができる。
また、第1の処理装置に接続された第1のA系通信装置と第2の処理装置に接続された第2のA系通信装置とは、第1の外部ネットワーク信号線と第2の外部ネットワーク信号線とにより二重に接続されており、通信の信頼性が向上する。
更に、第1の処理装置及び第2の処理装置の双方にて、第1のエンジン及び第2のエンジンの制御量を演算しており、第1の処理装置又は第2の処理装置のどちらかが故障しても、第1の処理装置又は第2の処理装置にて、第1のエンジン及び第2のエンジンを制御することが可能となる。
【発明を実施するための最良の形態】
【0016】
以下、本発明の実施の形態について図面に従って説明する。
しかしながら、本発明の技術的範囲はかかる実施の形態によって限定されるものではなく、特許請求の範囲に記載された発明とその均等物に及ぶものである。
【0017】
図1は、本発明の第1の実施の形態に係るエンジン制御装置の全体構成図、図2〜図12は、本発明の第1の実施の形態に係る制御フロー図である。
【0018】
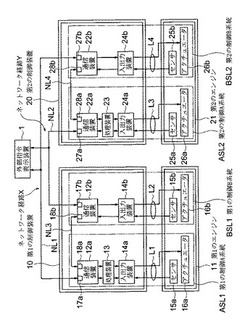
[第1の実施の形態の全体構成]
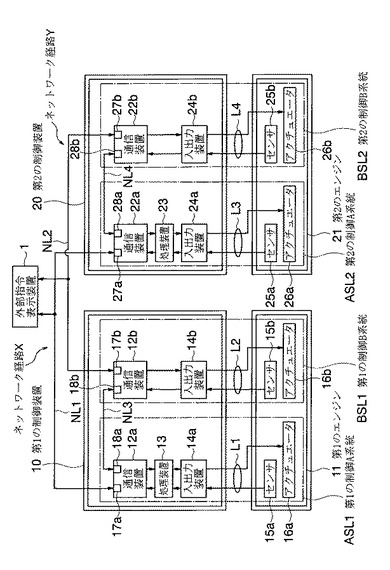
図1に基づき、本発明の第1の実施の形態に係るエンジン制御装置の全体構成を説明する。
全体構成は、次のようになっている。
各種センサやアクチュエータをそれぞれ持つ第1のエンジン11、第2のエンジン21と、前記各種センサから計測値を入手し、当該計測値から制御演算に使用する値(以降、入力値と呼ぶ)を決定し、外部指令表示装置1からの指令値と入力値とを比較し複数のエンジンへ供給する燃料量等(以降、制御量と呼ぶ)を演算で求め、各アクチュエータへの制御指令を行う第1の制御装置10、第2の制御装置20と、各種センサからの計測値、入力値や故障情報を乗務員に伝達し、また乗務員からの指示を入力するための外部指令表示装置1とから構成される。
【0019】
[第1の制御装置と第1のエンジンの説明]
続いて個々の構成を説明する。
まず、第1の制御装置10と第1のエンジン11について説明する。
第1の制御装置10内部は、各種データを受信して判定、演算、制御量の算出等の処理を行うCPUを備えた第1の処理装置13を有するA系統と、処理装置の無いB系統により構成されている。
【0020】
以下具体的に説明する。
A系統は、第1のA系通信装置12a、第1の処理装置13、第1のA系入出力装置14aから構成され、互いに接続されている。
第1のA系通信装置12aは、第1のA系外部用インタフェース17aと第1のA系内部用インタフェース18aを備えている。
この第1のA系外部用インタフェース17a、及び第1のA系内部用インタフェース18aは、各々第1の処理装置13に接続されている。
【0021】
B系統は、第1のB系通信装置12b、第1のB系入出力装置14bから構成され、互いに接続されている。
第1のB系通信装置12bは、第1のB系外部用インタフェース17bと第1のB系内部用インタフェース18bを備えている。
なお、この第1のB系通信装置12b等は、後述するように簡単なCPUを備えている。
【0022】
また、第1のA系内部用インタフェース18aと第1のB系内部用インタフェース18bとは、第1の内部ネットワーク信号線NL3により接続されている。
【0023】
第1の制御装置10のA、B系統に対応するように、第1のエンジン11の駆動系統及びセンサ類もA、B系統に分かれている。
第1のエンジン11の第1のA系センサ15a及び第1のA系アクチュエータ16aは、入出力信号線L1によって第1のA系入出力装置14aと接続されている。
そして、第1のA系通信装置12a、第1の処理装置13、第1のA系入出力装置14a、第1のA系センサ15a及び第1のA系アクチュエータ16aにより、第1の制御A系統ASL1が構成されている。
上述の構成において、第1の処理装置13により、第1のA系センサ15aからの計測値の受信や、第1のA系アクチュエータ16aへの制御指令が、第1のA系入出力装置14a及び入出力信号線L1を通して行われる。
【0024】
一方、第1のエンジン11の第1のB系センサ15b及び第1のB系アクチュエータ16bは、入出力信号線L2によって第1のB系入出力装置14bと接続されている。
そして、第1のB系通信装置12b、第1のB系入出力装置14b、第1のB系センサ15b及び第1のB系アクチュエータ16bにより、第1の制御B系統BSL1が構成されており、この第1の制御B系統BSL1には、判定、演算、制御量の算出等の処理を行う第1の処理装置13に相当するものが無い。
【0025】
なお、センサ及びアクチュエータの具体例の1つとしては、エンジンへ供給する燃料供給量の制御である。
即ち、第1のエンジン11への図示略の燃料供給管の流量制御弁には、パルスモータ等の第1のA系アクチュエータ16a及び第1のB系アクチュエータ16bが連結されており、この各アクチュエータ16a、16bには、各々ポテンションメータ等の第1のA系センサ15a、第1のB系センサ15bが設けられている。
そして、第1のA系アクチュエータ16aにて流量制御弁を制御している時は、第1のB系アクチュエータ16bは連れ動かされている。
このとき、故障していなければ、第1のA系センサ15a及び第1のB系センサ15bは、ほぼ同じ計測値を出力する。
【0026】
上述の構成において、通常運転時においては、第1の処理装置13により、第1のA系センサ15aからの計測値の受信や、第1のA系アクチュエータ16aへの制御指令が、第1のA系入出力装置14aを通して行われる。
なお、通常運転時においては、第1の処理装置13により、第1のB系センサ15bからの計測値の受信や、第1のB系アクチュエータ16bへの制御指令が、第1のB系入出力装置14b、第1のB系内部用インタフェース18b、第1の内部ネットワーク信号線NL3及び第1のA系内部用インタフェース18aを通して行われることもある。
【0027】
また、後述するように、異常時(第1のA系通信装置12a、第1の処理装置13、第1のA系入出力装置14a、第1のA系センサ15a及び第1のA系アクチュエータ16aのいずれかが故障)には、後述する第2の制御装置20内の第2の処理装置(CPU)23により、第1のB系センサ15bからの計測値の受信や、第1のB系アクチュエータ16bへの制御指令が、第1のB系入出力装置14b、第1のB系外部用インタフェース17b、第2の外部ネットワーク信号線NL2を通して行われる。
【0028】
なお、第1のB系センサ15b及び第1のB系アクチュエータ16bと第1のB系入出力装置14bとの間、及び、第1のB系入出力装置14bと第1のB系通信装置12bとの間は、各センサ及びアクチュエータの数に応じた信号線が存在する(例えば、B系において、センサが3個、アクチュエータが2個の場合は合計5系統)。
そして、第1のB系通信装置12b(或いは第1のB系入出力装置14b)は、上述の複数の信号をネットワーク信号線NL2、NL3に載せるべく、送信先エリア、発信元エリア、各種データエリアのデータ列に変換して送信し、或いは、送信されてきたネットワーク信号の内、必要なデータのみを選別、抽出するために、又は、第2のB系内部用インタフェース28bと第2のB系外部用インタフェース27bとの間の送受信データの接続のための最低限の処理機能(簡単なCPU)を有している。
一方、第1のA系通信装置12aは、上記機能を第1の処理装置13が行うため、上述のデータ列変換機能等は無くても良い。
【0029】
[第2の制御装置と第2のエンジンの説明]
次に、第2の制御装置20と第2のエンジン21について説明する。
第2の制御装置20は、第1の制御装置10と、第2のエンジン21は、第1のエンジン11とそれぞれ同じ構成をしており、それぞれの内部も、同様にA、B系統に分かれている。
【0030】
すなわち、第2の制御装置20のA系統は、第2のA系通信装置22a、各種データを受信して判定、演算、制御量の算出等の処理を行うCPUを備えた第2の処理装置23及び第2のA系入出力装置24aから構成され、B系統は、第2のB系通信装置22b、第2のB系入出力装置24bから構成されている。
また、第2のエンジン21のA系統は、第2のA系センサ25a、第2のA系アクチュエータ26aから構成され、B系統は、第2のB系センサ25b及び第2のB系アクチュエータ26bから構成されている。
【0031】
そして、第2のA系通信装置22a、第2の処理装置23、第2のA系入出力装置24a、第2のA系センサ25a及び第2のA系アクチュエータ26aにより、第2の制御A系統ASL2が構成されている。
また、第2のB系通信装置22b、第2のB系入出力装置24b、第2のB系センサ25b及び第2のB系アクチュエータ26bにより、第2の制御B系統BSL2が構成されており、この第2の制御B系統BSL2には、処理装置23に相当するものが無い。
【0032】
第2のA系通信装置22aは、第2のA系外部用インタフェース27aと第2のA系内部用インタフェース28aを備え、第2のB系通信装置22bは、第2のB系外部用インタフェース27bと第2のB系内部用インタフェース28bを備えている。
また、第2のA系内部用インタフェース28aと第2のB系内部用インタフェース28bとは、第2の内部ネットワーク信号線NL4により接続されている。
なお、第2のエンジン21の第2のA系センサ25a及び第2のA系アクチュエータ26aは、入出力信号線L3によって第2のA系入出力装置24aに接続され、第2のエンジン21の第2のB系センサ25b及び第2のB系アクチュエータ26bは、入出力信号線L4によって第2のB系入出力装置24bに接続されている。
【0033】
即ち、第2の制御A系統ASL2は、第1の制御A系統ASL1と同一の構成であり、第2の制御B系統BSL2も第1の制御B系統BSL1と同一の構成である。
【0034】
更に、第2のB系外部用インタフェース27bは、第1の外部ネットワーク信号線NL1により、外部指令表示装置1及び第1の制御装置10の第1のA系外部用インタフェース17aと接続され、第2のA系外部用インタフェース27aは、第2の外部ネットワーク信号線NL2により、外部指令表示装置1及び第1の制御装置10の第1のB系外部用インタフェース17bと接続されている。
【0035】
上述の構成において、第1の制御装置10と同様に、通常運転時においては、第2の処理装置23により、第2のA系センサ25aからの計測値の受信や、第2のA系アクチュエータ26aへの制御指令が、第2のA系入出力装置24aを通して行われる。
なお、通常運転時においては、第2の処理装置23により、第2のB系センサ25bからの計測値の受信や、第2のB系アクチュエータ26bへの制御指令が、第2のB系入出力装置24b、第2のB系内部用インタフェース28b、第2の内部ネットワーク信号線NL4及び第2のA系内部用インタフェース28aを通して行われることもある。
【0036】
また、後述するように、異常時(第2のA系通信装置22a、第2の処理装置23、第2のA系入出力装置24a、第2のA系センサ25a及び第2のA系アクチュエータ26aのいずれかが故障)には、第1の制御装置10内の第1の処理装置(CPU)13により、第2のB系センサ25bからの計測値の受信や、第2のB系アクチュエータ26bへの制御指令が、第2のB系入出力装置24b、第2のB系外部用インタフェース27b、第1の外部ネットワーク信号線NL1を通して行われる。
【0037】
[ネットワークの説明]
次に、第1、2制御装置10、20間を接続するネットワークについて説明する。
本実施の形態に係るネットワークは、次の二つのネットワーク経路X、Yが形成されている。
(A)ネットワーク経路X:
・第1の処理装置13
・第1のA系通信装置12a内の第1のA系外部用インタフェース17a
・第1の外部ネットワーク信号線NL1
・第2のB系通信装置22b内の第2のB系外部用インタフェース27b
・第2のB系通信装置22b内の第2のB系内部用インタフェース28b
・第2の内部ネットワーク信号線NL4
・第2のA系通信装置22a内の第2のA系内部用インタフェース28a
・第2の処理装置23
(B)ネットワーク経路Y:
・第1の処理装置13
・第1のA系通信装置12a内の第1のA系内部用インタフェース18a
・第1の内部ネットワーク信号線NL3
・第1のB系通信装置12b内の第1のB系内部用インタフェース18b
・第1のB系通信装置12b内の第1のB系外部用インタフェース17b
・第2の外部ネットワーク信号線NL2
・第2のA系通信装置22a内の第2のA系外部用インタフェース27a
・第2の処理装置23
なお、上述の二つのネットワーク経路X、Yは、各々双方向性である。
【0038】
そして、第1の処理装置13から第2の処理装置23へは、ネットワーク経路X、Yを通じて、所定時間(例えば、CPUの演算周期)毎に、最新の次のデータ等が、各ステップ毎(図2以降に図示)に送信される。
なお、第1のエンジン用の計測値、入力値、選定入力値、制御量、選定制御量は、単に「第1用」と称し、第2のエンジン用は「第2用」と称する。
・送信先(外部指令表示装置1、第2の処理装置23のどちらに送信するのかを区別)
・発信元
・第1のA系センサ15aからの第1用計測値1A(1AX、1AY)
・第1のB系センサ15bからの第1用計測値1B(1BX、1BY)
・第1の制御装置10における第1用入力値11(11X、11Y)
・第2の制御装置20における第2用入力値12(12X、12Y)
・第1の制御装置10における第1用制御量11(11X、11Y)
・第2の制御装置20における第2用制御量12(12X、12Y)
・第1の制御装置10内の各装置の故障情報
【0039】
また、第2の処理装置23から第1の処理装置13へも、ネットワーク経路X、Yを通じて、所定時間(例えば、CPUの演算周期毎)に、最新の次のデータ等が、各ステップ毎(図2以降に図示)に送信される。
・送信先(外部指令表示装置1、第2の処理装置23のどちらに送信するのかを区別)
・発信元
・第2のA系センサ25aからの第2用計測値2A(2AX、2AY)
・第2のB系センサ25bからの第2用計測値2B(2BX、2BY)
・第1の制御装置10における第1用入力値21(21X、21Y)
・第2の制御装置20における第2用入力値22(22X、22Y)
・第1の制御装置10における第1用制御量21(21X、21Y)
・第2の制御装置20における第2用制御量22(22X、22Y)
・第2の制御装置20内の各装置の故障情報
【0040】
そして、第1の処理装置13及び第2の処理装置23では、後述するように、上述の計測値、入力値、制御量の演算、共有化が、ステップ毎に行われる。
【0041】
また、上述のごとく、外部指令表示装置1は、第1の外部ネットワーク信号線NL1及び第2の外部ネットワーク信号線NL2に接続されている。
そして、外部指令表示装置1と第1の処理装置13との間も、第1の外部ネットワーク信号線NL1、第1のA系外部用インタフェース17aの経路と、第2の外部ネットワーク信号線NL2、第1のB系通信装置12b、第1の内部ネットワーク信号線NL3、第1のA系内部用インタフェース18aの経路との、二つの経路が存在する。
【0042】
そして、外部指令表示装置1から第1の処理装置13へ、上述の二つの経路を通じて、第1のエンジン11(第1のA系アクチュエータ16a又は第1のB系アクチュエータ16b)、及び第2のエンジン21(第2のA系アクチュエータ26a又は第2のB系アクチュエータ26b)への指令値等が送信される。
また、第1の処理装置13から外部指令表示装置1へ、上述の二つの経路を通じて、第1のA系センサ15a、第1のB系センサ15bからの計測値、後述する入力値、使用しているアクチュエータの番号、第1のA系アクチュエータ16a又は第1のB系アクチュエータ16bへの制御量、故障情報等が送信される。
【0043】
また、外部指令表示装置1と第2の処理装置23との間も、第2の外部ネットワーク信号線NL2、第2のA系外部用インタフェース27aの経路と、第1の外部ネットワーク信号線NL1、第2のB系通信装置22b、第2の内部ネットワーク信号線NL4、第2のA系内部用インタフェース28aの経路との、二つの経路が存在する。
【0044】
そして、外部指令表示装置1から第2の処理装置23へ、上述の二つの経路を通じて、第1のエンジン11(第1のA系アクチュエータ16a又は第1のB系アクチュエータ16b)、及び第2のエンジン21(第2のA系アクチュエータ26a又は第2のB系アクチュエータ26b)への指令値等が送信される。
また、第2の処理装置23から外部指令表示装置1へ、上述の二つの経路を通じて、第2のA系センサ25a、第2のB系センサ25bからの計測値、後述する入力値、使用しているアクチュエータの番号、第2のA系アクチュエータ26a又は第2のB系アクチュエータ26bへの制御量、故障情報等が送信される。
【0045】
このように、外部指令表示装置1、第1の処理装置13、第2の処理装置23の間は、各々二つの経路が存在しており、各通信装置の内部用インタフェース、外部用インタフェース、またはネットワーク信号線のいずれか1つが故障しても、二つある経路の残りの経路を使用してデータ通信を行うことができ、通信の信頼性が高くなっている。
【0046】
また、従来は、A、B系センサ、アクチュエータ毎に各種データを受信して判定、演算、制御量の算出等の処理を行うCPUを有する処理装置(CPU)を備えて、例えば、第1のA系においては、第1のA系センサから計測値を受信し、各種データを受信して判定、演算、制御量の算出等の処理を行うCPUを有する第1のA系処理装置で制御量を演算し、第1のA系アクチュエータを制御し、第1のB系においては、第1のB系センサから計測値を受信し、各種データを受信して判定、演算、制御量の算出等の処理を行うCPUを有する第1のB系処理装置で制御量を演算し、第1のB系アクチュエータを制御していた。
【0047】
これに対し、上述の本発明の第1の実施の形態に係るエンジン制御装置においては、例えば、第1のエンジン11の第1のA系センサ15a、第1のB系センサ15bからの計測値を第1の処理装置13のみならず、第2の処理装置23にも送信し、各処理装置13、23の双方にてこれらの計測値の有効性を確認、共有化し、その後、外部指令表示装置1からの制御指令値に基づき、各処理装置13、23の双方にて独自に第1のエンジン11の制御量を演算し、この制御量を更に各処理装置13、23の双方にて独自に有効性を確認、共有化し、その後、第1のエンジン11の第1のA系アクチュエータ16a(或いは、第1のB系アクチュエータ16b)を制御する。
【0048】
第2のエンジン21についても、上述と同等に、各処理装置13、23の双方にて独自に計測値、制御量の有効性を確認、共有化して、第2のエンジン21の第2のA系アクチュエータ26a(或いは、第2のB系アクチュエータ26b)を制御する。
【0049】
このように、ネットワーク信号線を二重化し、且つ、計測値、制御量を両方の処理装置で行い、有効性を確認、共有化することにより、各種データを受信して判定、演算、制御量の算出等の処理を行うCPUを有する処理装置の台数を従来の半分にしたにも係わらず、信頼性の高い制御装置を得ることができる。
【0050】
[エンジン制御]
次に、図2〜図12に基づき、エンジン制御における各種のデータの処理、共有化処理、アクチュエータの制御につき説明する。
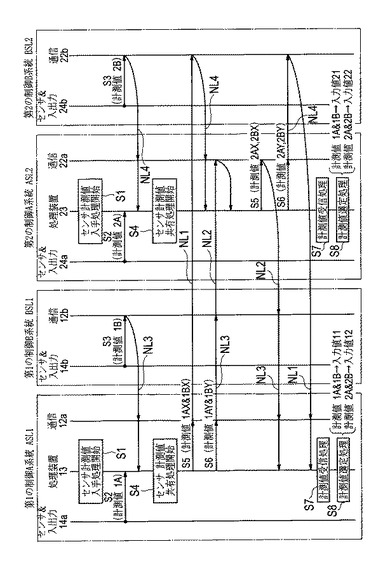
図2は、本発明の第1の実施の形態に係るエンジン制御におけるセンサ計測値入手、共有化処理のフロー図である。
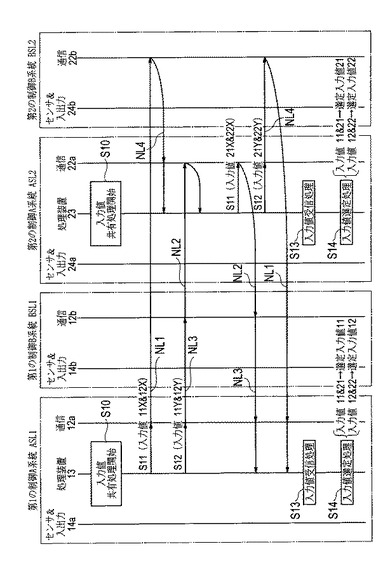
図3は、本発明の第1の実施の形態に係るエンジン制御における入力値共有処理のフロー図である。
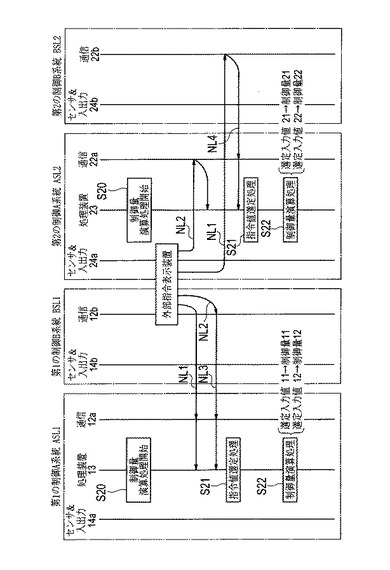
図4は、本発明の第1の実施の形態に係るエンジン制御における制御量演算処理のフロー図である。
図5は、本発明の第1の実施の形態に係るエンジン制御における制御量共有処理のフロー図である。
図6は、本発明の第1の実施の形態に係るエンジン制御におけるアクチュエータ制御のフロー図である。
図7、図8は、図2における受信処理、選定処理のフロー図である。
図9、図10は、図3における受信処理、選定処理、のフロー図である。
図11、図12は、図5における受信処理、選定処理、のフロー図である。
なお、図7〜図12は、第1の制御装置10における制御フローを図示したものであるが、第2の制御装置20においても図7〜図12と同様の処理が行われる。
【0051】
[センサ計測値入手処理]
先ず、図2、図7、図8に基づき、センサ計測値入手処理、計測値受信処理、計測値選定処理につき説明する。
図2に図示のように、第1の処理装置13、第2の処理装置23は、共にセンサ計測値入手処理を開始する(ステップS1)。
図1に図示の第1の制御装置10において、第1のエンジン11内の第1のA系センサ15aからの第1用計測値1Aは、第1のA系入出力装置14aを経て第1の処理装置13に送信され、第1の処理装置13内のメモリに保存される(ステップS2)。
また、第1のエンジン11内の第1のB系センサ15bからの第1用計測値1Bは、第1のB系入出力装置14b、第1のB系通信装置12b、第1の内部ネットワーク信号線NL3、第1のA系通信装置12aを経て第1の処理装置13に送信され、第1の処理装置13内のメモリに保存される(ステップS3)。
【0052】
同様に、図1に図示の第2の制御装置20において、第2のエンジン21内の第2のA系センサ25aからの第2用計測値2Aは、第2のA系入出力装置24aを経て第2の処理装置23に送信され、第2の処理装置23内のメモリに保存される(ステップS2)。
また、第2のエンジン21内の第2のB系センサ25bからの第2用計測値2Bは、第2のB系入出力装置24b、第2のB系通信装置22b、第2の内部ネットワーク信号線NL4、第2のA系通信装置22aを経て第2の処理装置23に送信され、第2の処理装置23内のメモリに保存される(ステップS3)。
【0053】
このように、ステップS2、S3の処理により、第1の処理装置13は、第1用計測値1Aと第1用計測値1Bを、第2の処理装置23は、第2用計測値2Aと第2用計測値2Bをそれぞれ受信しメモリに記憶する。
なお、この時点では、第1の処理装置13では第1用計測値1Aと第1用計測値1Bとが一致するか否か、又、第2の処理装置23では第2用計測値2Aと第2用計測値2Bとが一致するか否か等の判断は行わない。
【0054】
[センサ計測値共有処理]
次に、図2に図示のように、ステップS2、S3で得た第1用計測値1A、第1用計測値1B、第2用計測値2A、第2用計測値2Bを共有するため、第1の処理装置13、第2の処理装置23は、センサ計測値共有処理を開始する(ステップS4)。
このとき、上述の図1に基づき述べたように、第1の処理装置13、第2の処理装置23間のデータの送受信は、ネットワーク経路X、Yを経由して行われる。
【0055】
第1の処理装置13は、第1用計測値1A及び第1用計測値1Bを、第1用計測値1AX及び第1用計測値1BXとして、ネットワーク経路Xを使用して第2の処理装置23に送信する(ステップS5)。
2つ目の経路としてネットワーク経路Yを使用し、第1用計測値1A及び第1用計測値1Bを、第1用計測値1AY及び第1用計測値1BYとして、第2の処理装置23に送信する(ステップS6)。
【0056】
同様に、第2の処理装置23も、第2用計測値2A及び第2用計測値2Bを、第2用計測値2AX及び第2用計測値2BXとして、ネットワーク経路Xを使用して第1の処理装置13に送信する(ステップS5)。
2つ目の経路としてネットワーク経路Yを使用し、第2用計測値2A及び第2用計測値2Bを、第2用計測値2AY及び第2用計測値2BYとして、第1の処理装置13に送信する(ステップS6)。
【0057】
そして、第1の処理装置13は、センサ計測値共有化処理を開始(ステップS4)すると、データ受信処理を開始し、第2の処理装置23から送信されるデータを待つ(ステップS7)。
同様に、第2の処理装置23も、センサ計測値共有化処理を開始(ステップS4)すると、データ受信処理を開始し、第1の処理装置13から送信されるデータを待つ(ステップS7)。
【0058】
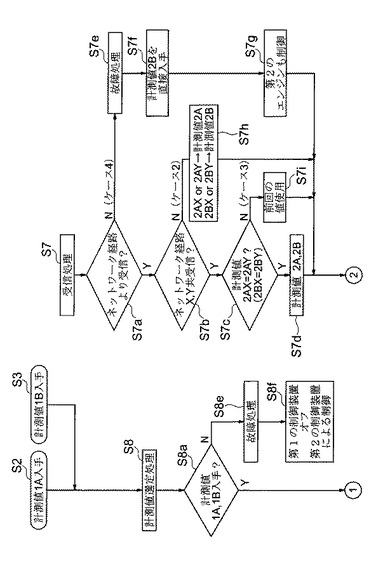
(計測値受信処理)
そして、図2、図7に図示のように、第1の処理装置13及び第2の処理装置23では、各々、二つのネットワーク経路X、Yからデータが受信されたか否か等の計測値受信処理を開始する(ステップS7)。
【0059】
この計測値受信処理においては、次の4通りのケースがある。
計測値送受信ケース1:所定の時間内に、二つのネットワーク経路X、Yの双方から各データを受信し、且つ、各データが一致した場合。
計測値送受信ケース2:所定の時間内に、二つのネットワーク経路X、Yの内、1経路からのみ各データを受信した場合。
計測値送受信ケース3:所定の時間内に、二つのネットワーク経路X、Yの双方から各データを受信したが、受信したデータが異なる場合。
計測値送受信ケース4:所定の時間を経過しても、二つのネットワーク経路X、Yの双方共に各データの受信が無い場合。
所定の時間とは、一方の第1の処理装置13(又は第2の処理装置23)が、他の第2の処理装置23(又は第1の処理装置13)にデータを送信してから受信するまでの正常時における最長ケースの時間以上の時間を適宜設定すればよい。
【0060】
先ず、第1の処理装置13は、計測値受信処理(ステップS7)において、ネットワーク経路X、Yから第2用計測値2AX、第2用計測値2AY、第2用計測値2BX、第2用計測値2BYを受信しバッファメモリ等に一次的に保存する作業を行う。
そして、バッファメモリ内の各データにつき、各データの受信があったか(ステップS7a、S7b)、各データが一致するか否かの確認(ステップS7c)、判定等を行う。
【0061】
計測値送受信ケース1の場合、第1の処理装置13では、所定の時間内に二つのネットワーク経路X、Yの双方からデータを受信したとき、各装置やネットワークに故障がなければ、バッファメモリ内の各データは、第2用計測値2AX=第2用計測値2AY、第2用計測値2BX=第2用計測値2BYとなるはずである(ステップS7a、S7b、S7c)。
バッファメモリに記憶された各データが一致した場合、バッファメモリ内の第2用計測値2AX又は第2用計測値2AYを、第2用計測値2Aとして、第2用計測値2BX又は第2用計測値2BYを、第2用計測値2Bとしてメモリに保存し(ステップS7d)、バッファメモリ内の各データについては有効フラグをリセットする等の処理を行う。
このようにして、第1の処理装置13のメモリ内には、ステップ2、3により入手した第1用計測値1A及び第1用計測値1B、ネットワーク経路X、Yにより受信したデータに基づく第2用計測値2A及び第2用計測値2Bが保存され、計測値受信処理(ステップS7)を終了する。
【0062】
同様に、第2の処理装置23も、計測値受信処理(ステップS7)において、ネットワーク経路X、Yから第1用計測値1AX、第1用計測値1AY、第1用計測値1BX、第1用計測値1BYを受信しバッファメモリ等に一次的に保存する作業を行う。
そして、第2の処理装置23は、バッファメモリ内の各データにつき、各データの受信があったか、各データが一致するか否かの確認、判定等を行う。
バッファメモリに記憶された各データが一致した場合、バッファメモリ内の第1用計測値1AX又は第1用計測値1AYを、第1用計測値1Aとして、第1用計測値1BX又は第1用計測値1BYを、第1用計測値1Bとしてメモリに保存し、バッファメモリ内の各データについては有効フラグをリセットする等の処理を行う。
このようにして、第2の処理装置23のメモリ内には、ステップ2、3により入手した第2用計測値2A及び第2用計測値2B、ネットワーク経路X、Yにより受信したデータに基づく第1用計測値1A及び第1用計測値1Bが保存され、計測値受信処理(ステップS7)を終了する。
【0063】
計測値送受信ケース1の場合、第1の処理装置13及び第2の処理装置23の各メモリには、各々、第1用計測値1A、第1用計測値1B、第2用計測値2A、第2用計測値2Bが保存されることになる。
【0064】
計測値送受信ケース2の、所定の時間内にネットワーク経路X、又はネットワーク経路Yのどちらか一方からしか各データを受信できなかった場合(ステップS7b)、受信し保存されたバッファメモリ内の各データを第1の処理装置13又は第2の処理装置23のメモリに保存し(ステップS7h)、計測値受信処理(ステップS7)は終了する。
これは、ネットワーク経路X、又はネットワーク経路Yのうち、どちらかの一方の経路で故障が発生したと考えられる。
ネットワーク経路に故障が発生しても、エンジン制御を停止させないために、受信した各データを優先して使用するものである。
【0065】
例えば、ネットワーク経路Yが故障した場合は、第1用計測値1AY、第1用計測値1BY、第2用計測値2AY、及び第2用計測値2BYは送受信されず、第1用計測値1AX、第1用計測値1BX、第2用計測値2AX、及び第2用計測値2BXのみが送受信される。
計測値送受信ケース2の場合も、第1の処理装置13及び第2の処理装置23の各メモリには、各々、第1用計測値1A、第1用計測値1B、第2用計測値2A、第2用計測値2Bが保存される。
【0066】
計測値送受信ケース3の、所定の時間内に、二つのネットワーク経路X、Yの双方から各データを受信したが、受信した各データが異なる場合(例えば、第1用計測値1AX≠第1用計測値1AY、第2用計測値2AX≠第2用計測値2AY、等)(ステップS7c)、受信し一次的に保存されたバッファメモリ内の各データは使用せず、第1の処理装置13又は第2の処理装置23ではメモリに記憶されている前回値を使用し(ステップS7i)、バッファメモリ内の各データについては有効フラグをリセットする等の処理を行う。
前回値とは、これ以前の時点で、第1の処理装置13及び第2の処理装置23のメモリに保存された、処理済みの各データのことである。
【0067】
例えば、第2用計測値2AX≠第2用計測値2AY、第2用計測値2BX≠第2用計測値2BYの場合、第1の処理装置13のメモリには、第1用計測値1A、第1用計測値1B、前回の第2用計測値2A、前回の第2用計測値2Bが保存される。
一方、第2の処理装置23のメモリには、受信した各計測値は一致しているので、第1用計測値1A、第1用計測値1B、第2用計測値2A、第2用計測値2Bが保存される。
【0068】
計測値送受信ケース4の、所定の時間を経過しても、第1の処理装置13(又は第2の処理装置23)において、二つのネットワーク経路X、Yの双方共に第2の処理装置23(又は第1の処理装置13)からの各データの送信が無い場合(ステップS7a)、第2の処理装置23(又は第1の処理装置13)に故障が発生しているものと判定し、後述する故障処理(ステップS7e)を行う。
【0069】
なお、計測値送受信ケース4の場合、例えば第2の処理装置23が故障したときは、第1の処理装置13のメモリには、第1用計測値1A、第1用計測値1B、0(第2用計測値2A無し)、0(第2用計測値2B無し)が保存される。
【0070】
即ち、第1の処理装置13又は第2の処理装置23そのものが故障した場合、故障箇所の連絡を処理する手段がなく、連絡ができない。
従って、所定時間経過後も各データの受信が全くないのは、送信されるはずのデータが用意できない(処理装置の故障)と判定する。
【0071】
このようにして、所定の時間を経過しても全くデータ受信が無いことを確認することにより、送信側の処理装置に故障が発生していないか監視することが可能となる。
また、第1の処理装置13と第2の処理装置23との間を結ぶネットワーク経路X、Yを構成する装置及び信号線に故障が発生していないか監視でき、仮にネットワーク経路X又はネットワーク経路Yの一方が故障してデータの送受信には使用できなくても、処理を続行することが可能であり、エンジン制御の信頼性を高めている。
また、図示はしないが、送信するデータにパリティビットを付与し、受信側でパリティチェックを行えばエラー訂正をより正確に行うこともできる。
【0072】
計測値送受信ケース4の場合、第1の処理装置13にて、第2のB系センサ25bの計測値2Bを直接入手し(ステップS7f)、第2のエンジンの制御も行う(ステップS7g)。
【0073】
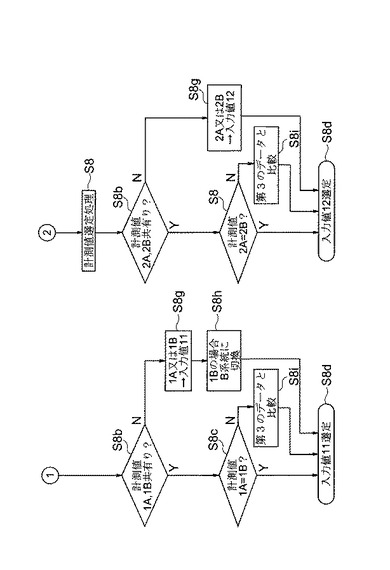
(計測値選定処理)
次に、図2、図7、図8に図示の計測値選定処理(ステップS8)につき、説明する。
上述の、所定の時間内に、二つのネットワーク経路X、Yの双方からデータを受信した場合(計測値送受信ケース1)、及び所定の時間内に、二つのネットワーク経路X、Yの内、1経路からのみデータを受信した場合(計測値送受信ケース2)には、上述のごとく、第1の処理装置13内のメモリ、及び第2の処理装置23内のメモリには、各々、第1用計測値1A、第1用計測値1B、第2用計測値2A、第2用計測値2Bが保存されている。
【0074】
そして、これらの保存された各データに基づき、第1の処理装置13、第2の処理装置23は、計測値選定処理を開始する(ステップS8)。
計測値選定処理は、第1のエンジン11の第1のA系センサ15a、第1のB系センサ15B、第2のエンジン21の第2のA系センサ25a、第2のB系センサ25bで故障しているセンサがないかを判定し、有効(すなわち、故障していない)と判定されたセンサのセンサ計測値を入力値(制御演算に使用する値)として決定する処理である。
判定は、双方の第1の処理装置13、第2の処理装置23において個別に行われる。
【0075】
計測値選定処理における故障しているセンサの判定法は、例えば、第1の処理装置13においては、次のようにして行われる。
先ず、第1の処理装置13内のメモリに記憶された第1のA系センサ15aからの第1用計測値1Aと第1のB系センサ15bからの第1用計測値1Bとの双方共に受信したか否かを確認する(ステップS8a)。
もし、どちらからも受信がなければ、故障処理を開始する(ステップS8e)。
即ち、第1の制御装置10による第1のエンジンの制御をオフにし、第2の制御装置20による第1のエンジンの制御に切り換える(ステップS8f)。
【0076】
次に、第1の処理装置13内のメモリに記憶された第1のA系センサ15aからの第1用計測値1A、第1のB系センサ15bからの第1用計測値1Bのどちらか一方のみの入手か否かを判定する(ステップS8b)。
そして、同じエンジンに対するセンサ計測値が1つしかない場合は、ある方の各データを採用し、第1用入力値11及び第2用入力値12を、第1の処理装置13内のメモリに保存し(ステップS8g)、入手した計測値が第1用計測値1Bの場合は、第1の制御B系統に切り換える(ステップS8h)。
【0077】
次に、第1の処理装置13内のメモリに記憶された第1のA系センサ15aからの第1用計測値1Aと第1のB系センサ15bからの第1用計測値1Bとが一致するか否かを判定する(ステップS8c)。
更に、第2の処理装置23から送信された第2用計測値2Aと第2用計測値2Bとが一致するかも判定する。
そして、一致すれば、センサに故障はなく、第1用計測値1A又は第1用計測値1Bを、第1用入力値11として、第2用計測値2A又は第2用計測値2Bを、第2用入力値12として、第1の処理装置13内のメモリに保存し終了する(ステップS8d)。
【0078】
各センサ計測値が一致しなければ、どちらかのセンサが故障しているとし、第3のデータと比較して値が近い方を第1用入力値11及び第2用入力値12として保存する(ステップS8i)。
第3のデータの例としては、他エンジンのセンサ計測値や、理論的なモデル式、後述する外部指令表示装置1からの制御量に対する応答性等から導かれる推定値を使用する。
このようにして、第1の処理装置13は、第1用計測値1A及び又は第1用計測値1Bから第1のエンジン11に対する第1用入力値11と、第2用計測値2A及び又は第2用計測値2Bから第2のエンジン21に対する第2用入力値12を選定する。
【0079】
第2の処理装置23においても、上述の第1の処理装置13と同様の処理を行う。
即ち、第2の処理装置23内のメモリに記憶された第2のA系センサ25aからの第2用計測値2Aと第2のB系センサ25bからの第2用計測値2Bとが一致するか否かを判定する。
更に、メモリに記憶された第1の処理装置13から送信された第1用計測値1Aと第1用計測値1Bとが一致するかを判定する。
そして、第1の処理装置13と同様の処理を行い、第1用計測値1A及び又は第1用計測値1Bから第1のエンジン11に対する第1用入力値21と、第2用計測値2A及び又は第2用計測値2Bから第2のエンジン21に対する第2用入力値22を選定する。
【0080】
なお、上述の計測値送受信ケース3において、第2用計測値2AX≠第2用計測値2AY、第2用計測値2BX≠第2用計測値2BYで前回の計測値が記憶されている場合にも、第1の処理装置13は、前回の第2用計測値2Aと前回の第2用計測値2Bとが一致するか否かを判定して、第2用入力値12を選出する。
【0081】
[入力値共有処理]
次に、図3に図示のように、図2に図示のステップS8で得た第1用入力値11、第2用入力値12、第1用入力値21、第2用入力値22を共有するため、第1の処理装置13、第2の処理装置23は、個別に入力値共有処理を開始する(ステップS10)。
図1に基づき説明したように、第1の処理装置13と第2の処理装置23との間の各データの送受信は、二つのネットワーク経路X、Yを経由して行われる。
【0082】
第1の処理装置13は、第1用入力値11及び第2用入力値12を、第1用入力値11X及び第2用入力値12Xとして、ネットワーク経路Xを使用して第2の処理装置23に送信する(ステップS11)。
2つ目の経路としてネットワーク経路Yを使用し、第1用入力値11及び第2用入力値12を、第1用入力値11Y及び第2用入力値12Yとして、第2の処理装置23に送信する(ステップS12)。
【0083】
同様に、第2の処理装置23も、第1用入力値21及び第2用入力値22を、第1用入力値21X及び第2用入力値22Xとして、ネットワーク経路Xを使用して第1の処理装置13に送信する(ステップS11)。
2つ目の経路としてネットワーク経路Yを使用し、第1用入力値21及び第2用入力値22を、第1用入力値21Y及び第2用入力値22Yとして、第1の処理装置13に送信する(ステップS12)。
【0084】
そして、第1の処理装置13は、入力値共有化処理を開始(ステップS10)すると、データ受信処理を開始し、第2の処理装置23から送信されるデータを待つ(ステップS13)。
同様に、第2の処理装置23も、入力値共有化処理を開始(ステップS10)すると、データ受信処理を開始し、第1の処理装置13から送信されるデータを待つ(ステップS13)。
【0085】
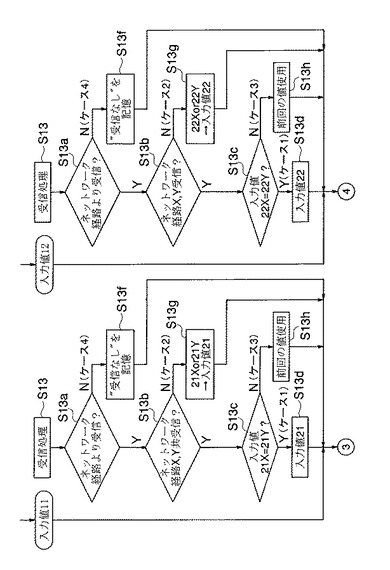
(入力値受信処理)
そして、図3、図9に図示のように、第1の処理装置13及び第2の処理装置23では、各々、二つのネットワーク経路X、Yからデータが受信されたか否か等の入力値受信処理を開始する(ステップS13)。
【0086】
この入力値受信処理においては、次の4通りのケースがある。
入力値送受信ケース1:所定の時間内に、二つのネットワーク経路X、Yの双方から各データを受信し、且つ、各データが一致した場合。
入力値送受信ケース2:所定の時間内に、二つのネットワーク経路X、Yの内、1経路からのみ各データを受信した場合。
入力値送受信ケース3:所定の時間内に、二つのネットワーク経路X、Yの双方から各データを受信したが、受信したデータが異なる場合。
入力値送受信ケース4:所定の時間を経過しても、二つのネットワーク経路X、Yの双方共に各データの受信が無い場合。
所定の時間とは、一方の第1の処理装置13(又は第2の処理装置23)が、他の第2の処理装置23(又は第1の処理装置13)にデータを送信してから受信するまでの正常時における最長ケースの時間以上の時間を適宜設定すればよい。
【0087】
先ず、第1の処理装置13は、入力値受信処理(ステップS13)において、ネットワーク経路X、Yから第1用入力値21X、第1用入力値21Y、第2用入力値22X、第2用入力値22Yを受信しバッファメモリ等に一次的に保存する作業を行う。
そして、バッファメモリ内の各データにつき、各データの受信があったか(ステップS13a、S13b)、各データが一致するか否かの確認(ステップS13c)、判定等を行う。
【0088】
入力値送受信ケース1の場合、第1の処理装置13では、所定の時間内に二つのネットワーク経路X、Yの双方からデータを受信したとき、各装置やネットワークに故障がなければ、バッファメモリ内の各データは、第1用入力値21X=第1用入力値21Y、第2用入力値22X=第2用入力値22Yとなるはずである(ステップS13a、S13b、S13c)。
バッファメモリに記憶された各データが一致した場合、バッファメモリ内の第1用入力値21X又は第1用入力値21Yを、第1用入力値21として、第2用入力値22X又は第2用入力値22Yを、第2用入力値22としてメモリに保存し(ステップS13d)、バッファメモリ内の各データについては有効フラグをリセットする等の処理を行う。
このようにして、第1の処理装置13のメモリ内には、ステップS8にて選出済みの第1用入力値11及び第2用入力値12、ネットワーク経路X、Yにより受信したデータに基づく第1用入力値21及び第2用入力値22が保存され、入力値受信処理(ステップS13)を終了する。
【0089】
同様に、第2の処理装置23も、入力値受信処理(ステップS13)において、ネットワーク経路X、Yから第1用入力値11X、第1用入力値11Y、第2用入力値12X、第2用入力値12Yを受信しバッファメモリ等に一次的に保存する作業を行う。
そして、第2の処理装置23は、バッファメモリ内の各データにつき、各データの受信があったか、各データが一致するか否かの確認、判定等を行う。
バッファメモリに記憶された各データが一致した場合、バッファメモリ内の第1用入力値11X又は第1用入力値11Yを第1用入力値11として、第2用入力値12X又は第2用入力値12Yを第2用入力値12としてメモリに保存し、バッファメモリ内の各データについては有効フラグをリセットする等の処理を行う。
このようにして、第2の処理装置23のメモリ内には、ステップS8にて選出済みの第1用入力値21及び第2用入力値22、ネットワーク経路X、Yにより受信したデータに基づく第1用入力値11及び第2用入力値12が保存され、入力値受信処理(ステップS13)を終了する。
【0090】
入力値送受信ケース1の場合、第1の処理装置13及び第2の処理装置23の各メモリには、各々、第1用入力値11、第2用入力値12、第1用入力値21、第2用入力値22が保存されることになる。
【0091】
入力値送受信ケース2の、所定の時間内にネットワーク経路X、又はネットワーク経路Yのどちらか一方からしか各データを受信できなかった場合(ステップS13b)、受信し保存されたバッファメモリ内の各データを第1の処理装置13又は第2の処理装置23のメモリに保存し(ステップS13g)、入力値受信処理(ステップS13)は終了する。
これは、ネットワーク経路X、又はネットワーク経路Yのうち、どちらかの一方の経路で故障が発生したと考えられる。
ネットワーク経路に故障が発生しても、エンジン制御を停止させないために、受信した各データを優先して使用するものである。
【0092】
例えば、ネットワーク経路Yが故障した場合は、第1用入力値11Y、第1用入力値21Y、第2用入力値12Y、及び第2用入力値22Yは送受信されず、第1用入力値11X、第1用入力値21X、第2用入力値12X、及び第2用入力値22Xのみが送受信される。
入力値送受信ケース2の場合も、第1の処理装置13及び第2の処理装置23の各メモリには、各々、第1用入力値11、第2用入力値12、第1用入力値21、第2用入力値22が保存される。
【0093】
入力値送受信ケース3の、所定の時間内に、二つのネットワーク経路X、Yの双方から各データを受信したが、受信した各データが異なる場合(例えば、第1用入力値11X≠第1用入力値11Y、第1用入力値21X≠第1用入力値21Y、等)(ステップS13c)、受信し一次的に保存されたバッファメモリ内の各データは使用せず、第1の処理装置13又は第2の処理装置23ではメモリに記憶されている前回値を使用し(ステップS13h)、バッファメモリ内の各データについては有効フラグをリセットする等の処理を行う。
前回値とは、これ以前の時点で、第1の処理装置13及び第2の処理装置23のメモリに保存された、処理済みの各データのことである。
【0094】
例えば、第1用入力値21X≠第1用入力値21Y、第2用入力値22X≠第2用入力値22Yの場合、第1の処理装置13のメモリには、第1用入力値11、第2用入力値12、前回の第1用入力値21、前回の第2用入力値22が保存されることになる。
一方、第2の処理装置23のメモリには、受信した各計測値は一致しているので、第1用入力値11、第2用入力値12、第1用入力値21、第2用入力値22が保存されることになる。
【0095】
入力値送受信ケース4の、所定の時間を経過しても、第1の処理装置13(又は第2の処理装置23)において、二つのネットワーク経路X、Yの双方共に第2の処理装置23(又は第1の処理装置13)からの各データの送信が無い場合、第1の処理装置13(又は第2の処理装置23)に故障が発生しているものと判定を行う。
【0096】
そして、入力値送受信ケース4の場合、第2の処理装置23が故障したときは、第1の処理装置13のメモリには、第1用入力値11、第2用入力値12、0(第1用入力値21無し)、0(第2用入力値22無し)が保存される(ステップS13f)。
【0097】
即ち、第1の処理装置13又は第2の処理装置23そのものが故障した場合、故障箇所の連絡を処理する手段がなく、連絡ができない。
従って、所定時間経過後も各データの受信が全くないのは、送信されるはずのデータが用意できない(処理装置の故障)と判定する。
【0098】
このようにして、所定の時間を経過しても全くデータ受信が無いことを確認することにより、送信側の処理装置に故障が発生していないか監視することが可能となる。
また、第1の処理装置13と第2の処理装置23との間を結ぶネットワーク経路X、Yを構成する装置及び信号線に故障が発生していないか監視でき、仮にネットワーク経路X又はネットワーク経路Yの一方が故障してデータの送受信には使用できなくても、処理を続行することが可能であり、エンジン制御の信頼性を高めている。
また、図示はしないが、送信するデータにパリティビットを付与し、受信側でパリティチェックを行えばより、エラー訂正をより正確に行うこともできる。
【0099】
(入力値選定処理)
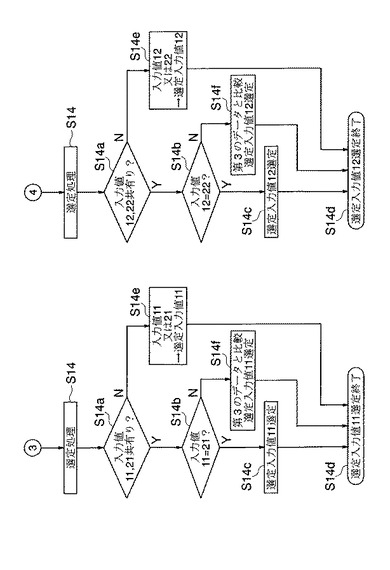
次に、図3、図10に図示の入力値選定処理(ステップS14)につき説明する。
上述の、所定の時間内に、二つのネットワーク経路X、Yの双方からデータを受信した場合(入力値送受信ケース1)、及び所定の時間内に、二つのネットワーク経路X、Yの内、1経路からのみデータを受信した場合(入力値送受信ケース2)には、上述のごとく、第1の処理装置13内のメモリ、及び第2の処理装置23内のメモリには、各々、第1用入力値11、第2用入力値12、第1用入力値21、第2用入力値22が保存されている。
【0100】
そして、これらの保存された各データに基づき、第1の処理装置13、第2の処理装置23は、入力値選定処理を開始する(ステップS14)。
判定は、双方の第1の処理装置13、第2の処理装置23において個別に行われる。
【0101】
入力値選定処理法は、例えば、第1の処理装置13においては、次のようにして行われる。
第1の処理装置13内のメモリに記憶された第1用入力値11と第2の処理装置23から送信された第1用入力値21とが両方共にあるか(ステップS14a)、また、一致するか否かを判定する(ステップS14b)。
更に、第2用入力値12と第2の処理装置23から送信された第2用入力値22とが一致するかも判定する(ステップS14b)。
そして、一致すれば、第1用入力値11又は第1用入力値21を、第1用選定入力値11として、第2用入力値12又は第2用入力値22を、第2用選定入力値12として、第1の処理装置13内のメモリに保存する(ステップS14c)。
【0102】
ここで、同じエンジンに対する入力値が1つしかない場合は、ある方の各データを採用し、第1用選定入力値11及び第2用選定入力値12を、第1の処理装置13内のメモリに保存する(ステップS14e)。
【0103】
入力値が一致しなければ(ステップS14b)、第3のデータと比較して値が近い方を第1用選定入力値11及び第2用選定入力値12として保存する(ステップS14f)。
第3のデータの例としては、他エンジンの入力値や、理論的なモデル式、後述する外部指令表示装置1からの制御量に対する応答性等から導かれる推定値を使用する。
このようにして、第1の処理装置13は、第1用入力値11及び又は第1用入力値21から第1のエンジン11に対する第1用選定入力値11と、第2用入力値12及び又は第2用入力値22から第2のエンジン21に対する第2用選定入力値12を選定する。
【0104】
第2の処理装置23においても、上述の第1の処理装置13と同様の処理を行う。
即ち、第2の処理装置23内のメモリの第1の処理装置13から送信された第1用入力値11と第1用入力値21とが一致するか否かを判定する。
更に、第1の処理装置13から送信された第2用入力値12と第2用入力値22とが一致するかを判定する。
そして、第1の処理装置13と同様の処理を行い、第1用入力値11及び又は第1用入力値21から第1のエンジン11に対する第1用選定入力値21と、第2用入力値12及び又は第2用入力値22から第2のエンジン21に対する第2用選定入力値22を選定する。
【0105】
[制御量演算処理]
ステップS14が済むと、図4に図示のように、第1の処理装置13、第2の処理装置23は、各選定第1用入力値11、12、21、22からそれぞれのエンジンに対する制御量を求める、制御量演算処理を開始する(ステップS20)。
【0106】
先ず、第1の処理装置13、第2の処理装置23は、外部指令表示装置1から、二つのネットワーク経路X、Yを通して第1のエンジン11及び第2のエンジン21に対する指令値を入手する。
そして、どちらかの選定指令値を選定する(ステップS21)。
【0107】
ステップS22によって、第1の処理装置13は、第1のエンジン11に対する選定指令値と第1用選定入力値11とから、第1のエンジン11に対する第1用制御量11を、第2のエンジン21に対する選定指令値と第2用選定入力値12とから、エンジン2に対する第2用制御量12を得る。
同様に、第2の処理装置23は、第1のエンジン11に対する選定指令値と第1用選定入力値21から、第1のエンジン11に対する第1用制御量21を、第2のエンジン21に対する選定指令値と第2用選定入力値22から、第2のエンジン21に対する第2用制御量22を得る。
【0108】
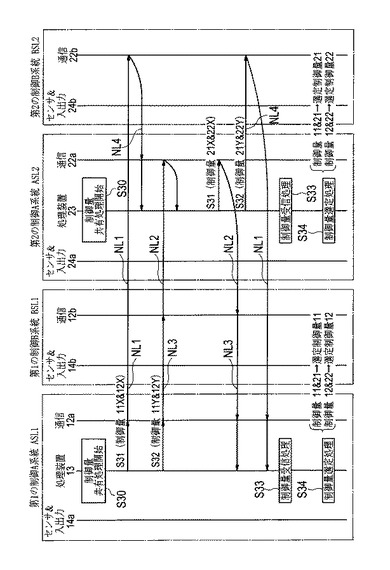
[制御量共有処理]
ステップS22で得た制御量を共有するため、図5に図示のように、第1の処理装置13、第2の処理装置23は、制御量共有処理を開始する(ステップS30)。
このとき、上述の図1に基づき述べたように、第1の処理装置13、第2の処理装置23間のデータの送受信は、ネットワーク経路X、Yにて行われる。
【0109】
第1の処理装置13は、第1用制御量11及び第2用制御量12を、第1用制御量11X及び第2用制御量12Xとして、ネットワーク経路Xを使用して第2の処理装置23に送信する(ステップS31)。
2つ目の経路としてネットワーク経路Yを使用し、第1用制御量11及び第2用制御量12を、第1用制御量11Y及び第2用制御量12Yとして、第2の処理装置23に送信する(ステップS32)。
【0110】
同様に、第2の処理装置23も、第1用制御量21及び第2用制御量22を、第1用制御量21X及び第2用制御量22Xとして、ネットワーク経路Xを使用して第1の処理装置13に送信する(ステップS31)。
2つ目の経路としてネットワーク経路Yを使用し、第1用制御量21及び第2用制御量22を、第1用制御量21Y及び第2用制御量22Y、第1の処理装置13に送信する(ステップS32)。
【0111】
そして、第1の処理装置13は、制御量共有化処理を開始(ステップS30)すると、第2の処理装置23から送信されるデータを待つ(ステップS33)。
同様に、第2の処理装置23も、センサ計測値共有化処理を開始(ステップS30)すると、データ受信処理を開始し、第1の処理装置13から送信されるデータを待つ(ステップS33)。
【0112】
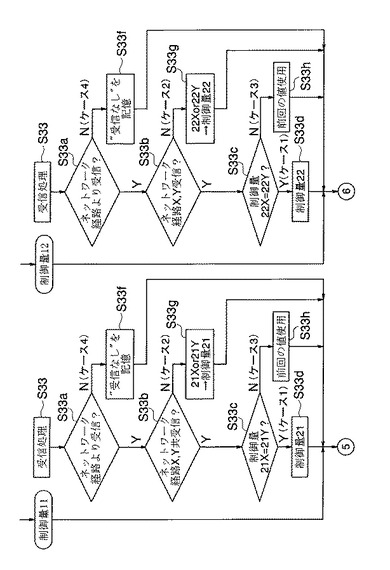
(制御量受信処理)
そして、図5、図11に図示のように、第1の処理装置13及び第2の処理装置23では、各々、二つのネットワーク経路X、Yからデータが受信されたか否か等の計測値受信処理を開始する(ステップS33)。
【0113】
この制御量送受信処理は、次の4通りのケースがある。
制御量送受信ケース1:所定の時間内に、二つのネットワーク経路X、Yの双方から各データを受信し、且つ、各データが一致した場合。
制御量送受信ケース2:所定の時間内に、二つのネットワーク経路X、Yの内、1経路からのみ各データを受信した場合。
制御量送受信ケース3:所定の時間内に、二つのネットワーク経路X、Yの双方から各データを受信したが、受信したデータが異なる場合。
制御量送受信ケース4:所定の時間を経過しても、二つのネットワーク経路X、Yの双方共に各データの受信が無い場合。
所定の時間とは、一方の第1の処理装置13(又は第2の処理装置23)が、他の第2の処理装置23(又は第1の処理装置13)にデータを送信してから受信するまでの正常時における最長ケースの時間以上の時間を適宜設定すればよい。
【0114】
先ず、第1の処理装置13では、制御量受信処理(ステップS33)において、ネットワーク経路X、Yから第1用制御量21X、第1用制御量21Y、第2用制御量22X、第2用制御量22Yを受信しバッファメモリ等に一次的に保存する作業を行う。
そして、バッファメモリ内の各データにつき、各データの受信があったか(ステップS33a、S33b)、各データが一致するか否かの確認(ステップS33c)、判定等を行う。
【0115】
制御量送受信ケース1の場合、第1の処理装置13では、所定の時間内に二つのネットワーク経路X、Yの双方からデータを受信したとき、各装置やネットワークに故障がなければ、バッファメモリ内の各データは、第1用制御量21X=第1用制御量21Y、第2用制御量22X=第2用制御量22Yとなるはずである(ステップS33a、S33b、S33c)。
バッファメモリに記憶された各データが一致した場合、バッファメモリ内の第1用制御量21X又は第1用制御量21Yを、第1用制御量21としてメモリに保存し(ステップS33d)、且つ第2用制御量22X又は第2用制御量22Yを、第2用制御量22としてメモリに保存し、バッファメモリ内の各データについては有効フラグをリセットする等の処理を行う。
【0116】
このようにして、第1の処理装置13のメモリ内には、ステップ22により入手した第1用制御量11及び第2用制御量12、ネットワーク経路X、Yにより受信したデータに基づく第1用制御量21及び第2用制御量22が保存され、制御量受信処理を終了する。
【0117】
同様に、第2の処理装置23も、制御量受信処理(ステップS33)において、ネットワーク経路X、Yから第1用制御量11X、第1用制御量11Y、第2用制御量12X、第2用制御量12Yを受信しバッファメモリ等に一次的に保存する作業を行う。
そして、第2の処理装置23は、バッファメモリ内の各データにつき、各データの受信があったか、各データが一致するか否かの確認、判定等を行う。
バッファメモリに記憶された各データが一致した場合、バッファメモリ内の第1用制御量11X又は第1用制御量11Yを、第1用制御量11としてメモリに保存し、且つ第2用制御量12X又は第2用制御量12Yを、第2用制御量12としてメモリに保存し、バッファメモリ内の各データについては有効フラグをリセットする等の処理を行う。
【0118】
このようにして、第2の処理装置23のメモリ内には、ステップS22により入手した第1用制御量21及び第2用制御量22、ネットワーク経路X、Yにより受信したデータに基づく第1用制御量11及び第2用制御量12が保存され、計測値受信処理(ステップS33)を終了する。
【0119】
制御量送受信ケース1の場合、第1の処理装置13及び第2の処理装置23の各メモリには、各々、第1用制御量11、第2用制御量12、第1用制御量21、第2用制御量22が保存されることになる。
【0120】
制御量送受信ケース2の、所定の時間内にネットワーク経路X、又はネットワーク経路Yのどちらか一方からしか各データを受信できなかった場合(ステップS33b)、受信し保存されたバッファメモリ内の各データを第1の処理装置13又は第2の処理装置23のメモリに保存し(ステップS33g)、計測値受信処理(ステップS33)は終了する。
これは、ネットワーク経路X、又はネットワーク経路Yのうち、どちらかの一方の経路で故障が発生したと考えられる。
ネットワーク経路に故障が発生しても、エンジン制御を停止させないために、受信した各データを優先して使用するものである。
制御量送受信ケース2の場合も、第1の処理装置13及び第2の処理装置23の各メモリには、各々、第1用制御量11、第2用制御量12、第1用制御量21、第2用制御量22が保存される。
【0121】
制御量送受信ケース3の、所定の時間内に、二つのネットワーク経路X、Yの双方から各データを受信したが、受信した各データが異なる場合(例えば、第1用制御量11X≠第1用制御量11Y、第1用制御量21X≠第1用制御量21Y、等)(ステップS33c)、受信し一次的に保存されたバッファメモリ内の各データは使用せず、第1の処理装置13又は第2の処理装置23ではメモリに記憶されている前回値を使用し(ステップS33h)、バッファメモリ内の各データを保存する。
前回値とは、これ以前の時点で、第1の処理装置13及び第2の処理装置23のメモリに保存された、処理済みの各データのことである。
【0122】
例えば、第1用制御量21X≠第1用制御量21Y、第2用制御量22X≠第2用制御量22Yの場合、第1の処理装置13のメモリには、第1用制御量11、第2用制御量12、前回の第1用制御量21、前回の第2用制御量22が保存されることになる。
一方、第2の処理装置23のメモリには、受信した各計測値は一致しているので、第1用制御量11、第2用制御量12、第1用制御量21、第2用制御量22が保存されることになる。
【0123】
制御量送受信ケース4の、所定の時間を経過しても、第1の処理装置13(又は第2の処理装置23)において、二つのネットワーク経路X、Yの双方共に第2の処理装置23(又は第1の処理装置13)からの各データの送信が無い場合、第1の処理装置13(又は第2の処理装置23)に故障が発生しているものと判定し、後述する故障処理を行う。
【0124】
なお、制御量送受信ケース4の場合、第2の処理装置23が故障したときは、第1の処理装置13のメモリには、第1用制御量11、第2用制御量12、0(第1用制御量21無し)、0(第2用制御量22無し)が保存される。
【0125】
しかしながら、第1の処理装置13又は第2の処理装置23そのものが故障した場合、故障箇所の連絡を処理する手段がなく、連絡ができない。
従って、所定時間経過後も各データの受信が全くないのは、送信されるはずのデータが用意できない(処理装置の故障)と判定する。
【0126】
このようにして、所定の時間を経過しても全くデータ受信が無いことを確認することにより、送信側の処理装置に故障が発生していないか監視することが可能となる。
また、第1の処理装置13と第2の処理装置23との間を結ぶネットワーク経路X、Yを構成する装置及び信号線に故障が発生していないか監視でき、仮にネットワーク経路X又はネットワーク経路Yの一方が故障してデータの送受信には使用できなくても、処理を続行することが可能であり、エンジン制御の信頼性を高めている。
また、図示はしないが、送信するデータにパリティビットを付与し、受信側でパリティチェックを行えばより、エラー訂正をより正確に行うこともできる。
【0127】
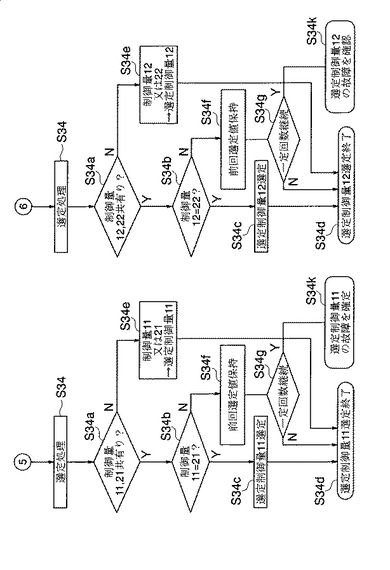
(制御量選定処理)
次に、図5、図12に図示の制御量選定処理(ステップS34)につき説明する。
上述の、所定の時間内に、二つのネットワーク経路X、Yの双方からデータを受信した場合(制御量送受信ケース1)、及び所定の時間内に、二つのネットワーク経路X、Yの内、1経路からのみデータを受信した場合(制御量送受信ケース2)には、上述のごとく、第1の処理装置13内のメモリ、及び第2の処理装置23内のメモリには、各々、第1用制御量11、第2用制御量12、第1用制御量21、第2用制御量22が保存されている。
【0128】
そして、これらの保存された各データに基づき、第1の処理装置13、第2の処理装置23は、制御量選定処理を開始する(ステップS34)。
選定は、双方の第1の処理装置13、第2の処理装置23において個別に行われる。
【0129】
制御量の選定は、例えば、第1の処理装置13においては、次のようにして行われる。
第1の処理装置13内のメモリに記憶された第1用制御量11と、第2の処理装置23から送信された第1用制御量21とが両方共にあるか(ステップS34a)、また、一致するか否かを判定する(ステップS34b)。
更に、メモリに記憶された第2用制御量12と、第2の処理装置23から送信された第2用制御量22とが一致するかも判定する(ステップS34b)。
そして、一致すれば、第1の処理装置13及び第1の処理装置13に故障はなく、第1用制御量11又は第1用制御量21を、第1用選定制御量11として、第2用制御量12又は第2用制御量22を第2用選定制御量12として、第1の処理装置13内のメモリに保存する(ステップS34c)。
【0130】
ここで、同じエンジンに対する制御量が1つしかない場合は、ある方の各制御量を採用し、第1用選定制御量11及び第2用選定制御量12を、第1の処理装置13内のメモリに保存する(ステップS34e)。
【0131】
同じエンジンに対する制御量が一致しなければ(ステップS34b)、前回の選定制御量を維持する(ステップS34f)。さらに、複数回にわたり連続して一致しなければ(ステップS34g)、そのエンジンに対する制御装置の故障であることを確定する(ステップS34k)。
【0132】
このようにして、第1の処理装置13は、第1用制御量11及び又は第1用制御量21から、第1のエンジン11に対する第1用選定制御量11を選出し、第2用制御量12及び又は第2用制御量22から、第2のエンジン21に対する第2用選定制御量12を選定する。
【0133】
第2の処理装置23においても、上述の第1の処理装置13と同様の処理を行う。
即ち、第2の処理装置23内のメモリに記憶された第1用制御量21と、第1の処理装置13から送信された第1用制御量11とが一致するか否かを判定する。
更に、メモリに記憶された第2用制御量22と、第1の処理装置13から送信された第2用制御量12とが一致するかを判定する。
そして、第1の処理装置13と同様の処理を行い、第1用制御量11及び又は第1用制御量21から、第1のエンジン11に対する第1用選定制御量21と、第2用制御量12及び又は第2用制御量22から第2のエンジン21に対する第2用選定制御量22を選定する。
【0134】
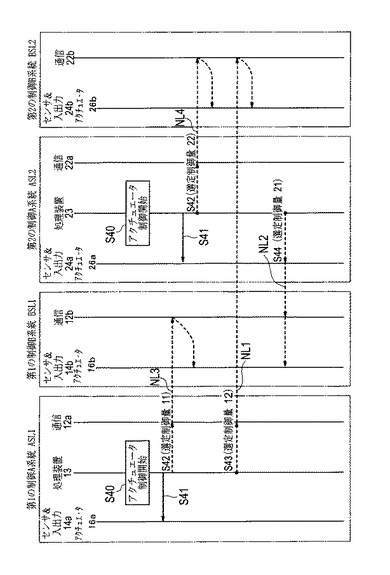
[アクチュエータ制御処理]
ステップS30が済むと、図6に図示のように、上述の選定制御量を基に、第1の処理装置13、第2の処理装置23が対応するアクチュエータに制御指令を出す、アクチュエータ制御を開始する(ステップS40)。
ステップS40で行う、アクチュエータ制御処理は例えば次のようにする。
まず、第1の処理装置13、第2の処理装置23が、制御するアクチュエータを決定する。
【0135】
第1のA系入出力装置14a、第1のA系センサ15a、第1のA系アクチュエータ16a、入出力信号線L1等に故障が起きていない場合、第1の処理装置13は、選定制御量11に基づき、図6に実線で図示のように、第1のA系アクチュエータ16aに制御指令を出す(ステップS41)。
また、A系が故障している場合には、第1の処理装置13は、選定制御量11に基づき、図6に点線で図示のように、第1のA系通信装置12a、第1のB系通信装置12b、第1のB系入出力装置14bを通して、第1のB系アクチュエータ16bに制御指令を出す(ステップS42)。
【0136】
同様に、第2のA系入出力装置24a、第2のA系センサ25a、第2のA系アクチュエータ26a、入出力信号線L3等に故障が起きていない場合、第2の処理装置23は、図6に実線で図示のように、選定制御量22に基づき、第2のA系アクチュエータ26aに制御指令を出す(ステップS41)。
また、A系が故障している場合には、第2の処理装置23は、選定制御量22に基づき、図6に点線で図示のように、第2のA系通信装置22a、第2のB系通信装置22b、第2のB系入出力装置24bを通して、第2のB系アクチュエータ26bに制御指令を出す(ステップS42)。
【0137】
更に、例えば、第2の処理装置23及び又は第2のA系通信装置22a等が故障している場合には、第1の処理装置13は、選定制御量12に基づき、第1のA系通信装置12a、第1の外部ネットワーク信号線NL1、第2のB系通信装置22b、第2のB系入出力装置24bを通して、第2のB系アクチュエータ26bに制御指令を出す(ステップS43)。
【0138】
[第2の実施の形態の全体構成]
次に、図13に基づき、本発明の第2の実施の形態に係るエンジン制御装置の全体構成を説明する。
図13に図示のものは、第1のA系通信装置12aの第1のA系外部用インタフェース17aと、第2のA系通信装置22aの第2のA系外部用インタフェース27aとを、第1の外部ネットワーク信号線NL1で接続し、第1のB系通信装置12bの第1のB系外部用インタフェース17bと、第2のB系通信装置22bの第2のB系外部用インタフェース27bとを第2の外部ネットワーク信号線NL2で接続したものである。
その他の外部指令表示装置1、第1の制御装置10、第1のエンジン11、第2の制御装置20、第2のエンジン21等は、第1の実施の形態のものと同一である。
【0139】
この接続によっても、外部指令表示装置1、第1の制御装置10、第2の制御装置20を結ぶ経路が2経路存在する。
従って、本発明の第2の実施の形態に係るエンジン制御装置も、第1の実施の形態のものと同様に機能し、同一の作用効果を奏する。
【0140】
[その他の形態]
以上、本発明の第1、2の実施の形態につき説明したが、本発明は上記の実施の形態に限定されず、本発明の範囲内でその具体的構造に種々の変更を加えてよいことはいうまでもない。
例えば、データの送受信は、送信先、発信元、各計測値、各入力値、各制御量、故障情報等を一度に行うようにしても良い。
このようにすれば、ネットワークの故障の有無、処理装置の故障の有無等の判断は一回とすることができる。
【図面の簡単な説明】
【0141】
【図1】本発明の第1の実施の形態に係るエンジン制御装置の全体構成図である。
【図2】本発明の第1の実施の形態に係るエンジン制御におけるセンサ計測値入手、共有化処理のフロー図である。
【図3】本発明の第1の実施の形態に係るエンジン制御における入力値共有処理のフロー図である。
【図4】本発明の第1の実施の形態に係るエンジン制御における制御量演算処理のフロー図である。
【図5】本発明の第1の実施の形態に係るエンジン制御における制御量共有処理のフロー図である。
【図6】本発明の第1の実施の形態に係るエンジン制御におけるアクチュエータ制御のフロー図である。
【図7】図2における受信処理、選定処理のフロー図である。
【図8】図2における選定処理のフロー図である。
【図9】図3における受信処理のフロー図である。
【図10】図3における選定処理のフロー図である。
【図11】図5における受信処理のフロー図である。
【図12】図5における選定処理のフロー図である。
【図13】本発明の第2の実施の形態に係るエンジン制御装置の全体構成図である。
【符号の説明】
【0142】
1 外部指令表示装置
10 第1の制御装置
11 第1のエンジン
12a 第1のA系通信装置
12b 第1のB系通信装置
13 第1の処理装置
14a 第1のA系入出力装置
14b 第1のB系入出力装置
15a 第1のA系センサ
15b 第1のB系センサ
16a 第1のA系アクチュエータ
16b 第1のB系アクチュエータ
17a 第1のA系外部用インタフェース
17b 第1のB系外部用インタフェース
18a 第1のA系内部用インタフェース
18b 第1のB系内部用インタフェース
20 第2の制御装置
21 第2のエンジン
22a 第2のA系通信装置
22b 第2のB系通信装置
23 第2の処理装置
24a 第2のA系入出力装置
24b 第2のB系入出力装置
25a 第2のA系センサ
25b 第2のB系センサ
26a 第2のA系アクチュエータ
26b 第2のB系アクチュエータ
27a 第2のA系外部用インタフェース
27b 第2のB系外部用インタフェース
28a 第2のA系内部用インタフェース
28b 第2のB系内部用インタフェース
ASL1 第1の制御A系統
ASL2 第2の制御A系統
BSL1 第1の制御B系統
BSL2 第2の制御B系統
NL1 第1の外部ネットワーク信号線
NL2 第2の外部ネットワーク信号線
NL3 第1の内部ネットワーク信号線
NL4 第2の内部ネットワーク信号線
L1〜L4 入出力信号線
【技術分野】
【0001】
本発明は、2台のエンジンを制御する場合のエンジン制御装置に関する。
【背景技術】
【0002】
従来、2台のエンジンを持つ航空機のエンジンを制御する場合、エンジンごとに取り付けられたエンジン制御装置が、対応するエンジンのみを専属で制御する。
各エンジン制御装置内は、制御系統が2重に設けられた冗長構成をなし、各制御系統が通信装置、中央処理装置、入出力装置などを持つ。
通常は2系統の制御系統のうち片側がエンジン制御を担当し、制御を担当している制御系統のどこかの装置で故障が発生した場合、制御を担当する制御系統を別の系統に切り換えることで、その制御装置に対応するエンジンの制御を続行する。
【0003】
つまり、制御装置が2系統の冗長構成であることによって、ある1つの装置が故障してもエンジン制御を続行可能にして高信頼性を実現している(例えば、特許文献1参照。)。
【0004】
【特許文献1】特開平5−12048号公報(第1頁〔請求項1〕4−10行目、第2頁、第7頁〔図1〕、第8頁〔図3〕)
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の制御装置は、冗長構成になっているために、制御装置を構成する部品数が多い。
即ち、2台のエンジン用の制御装置の場合、エンジンからのセンサの計測値を受信してエンジンの制御量を演算するための制御装置が合計4台必要となる。
この計測値を受信してエンジンの制御量を演算するための制御装置は容積が大きく、重量も大きく、製造や維持にかかる費用も大きい。
また故障箇所を特定することや、修理することを考慮すると部品数が少ない方が管理もしやすい。
【0006】
従って、制御装置の重量を軽くし、容積を小さく抑え、管理を容易にし、製造・維持費用を安くするために、部品数を減らすことが望ましい。
そこで、近年品質が向上し、中央処理装置が故障しにくいものとなってきた背景から、例えば、各エンジン制御装置内の中央処理装置の台数を1つに減らすことが考えられる。
しかし、各エンジン制御装置が専属でエンジンを制御する従来のような場合、中央処理装置が故障すると、直ちにその中央処理装置を含む制御装置が、対応するエンジンを制御できない状態になる。
その結果、乗務員による手動制御もしくは最悪の場合エンジン停止に追い込まれ、高信頼性を実現することができない。
【0007】
また、中央処理装置ではなく、エンジン制御装置自体の台数を減らして、1つの冗長構成のエンジン制御装置が常に2台のエンジン制御を行うことが考えられる。
しかし、この場合もやはり、制御装置が万が一攻撃を受けて制御できない状態になった時点で一度に2台のエンジンが制御できなくなり、高信頼性を実現することができない。
そこで本発明の目的は、部品数を減らしつつ、高信頼性を維持できるエンジン制御装置を提供することにある。
【課題を解決するための手段】
【0008】
本発明は、上記従来の課題を解決するためになされたもので、特許請求の範囲に記載された各発明は、エンジン制御装置として、それぞれ以下に述べる各手段を採用したものである。
【0009】
(1)第1の手段のエンジン制御装置は、第1のエンジン及び第2のエンジンと、第1のエンジンに設けられた第1のA系センサ、第1のB系センサ、第1のA系アクチュエータ及び第1のB系アクチュエータと、第1のA系センサ及び第1のA系アクチュエータに接続された第1のA系入出力装置と、第1のA系入出力装置を介して第1のA系センサから計測値を入力すると共に第1のA系アクチュエータの制御量を演算し制御する第1の処理装置と、第1の処理装置に接続された第1のA系通信装置と、第1のB系センサ及び第1のB系アクチュエータに接続された第1のB系入出力装置と、第1のB系入出力装置に接続された第1のB系通信装置と、第1のA系通信装置と第1のB系通信装置とを接続する第1の内部ネットワーク信号線と、第2のエンジンに設けられた第2のA系センサ、第2のB系センサ、第2のA系アクチュエータ及び第2のB系アクチュエータと、第2のA系センサ及び第2のA系アクチュエータに接続された第2のA系入出力装置と、第2のA系入出力装置を介して第2のA系センサから計測値を入力すると共に第2のA系アクチュエータの制御量を演算し制御する第2の処理装置と、第2の処理装置に接続された第2のA系通信装置と、第2のB系センサ及び第2のB系アクチュエータに接続された第2のB系入出力装置と、第2のB系入出力装置に接続された第2のB系通信装置と、第2のA系通信装置と第2のB系通信装置とを接続する第2の内部ネットワーク信号線と、第1のA系通信装置と第2のB系通信装置又は第2のA系通信装置とを接続する第1の外部ネットワーク信号線と、第1のB系通信装置と第2のA系通信装置又は第2のB系通信装置とを接続する第2の外部ネットワーク信号線と、第1の外部ネットワーク信号線及び第2の外部ネットワーク信号線に接続された外部指令表示装置とを備えたことを特徴とする。
【0010】
(2)第2の手段のエンジン制御装置は、第1の手段において、第1の処理装置は、第1のB系入出力装置、第1のB系通信装置及び第1のA系通信装置を介して第1のB系センサから計測値を入力すると共に第1のB系アクチュエータの制御量を演算し制御し、第2の処理装置は、第2のB系入出力装置、第2のB系通信装置及び第2のA系通信装置を介して第2のB系センサから計測値を入力すると共に第2のB系アクチュエータの制御量を演算し制御するものであることを特徴とする。
【0011】
(3)第3の手段のエンジン制御装置は、第1又は2の手段において、第1のA系センサ及び第1のB系センサからの計測値は、第1の外部ネットワーク信号線及び第2の外部ネットワーク信号線を介して第2の処理装置にも送信され、第2のA系センサ及び第2のB系センサからの計測値は、第1の外部ネットワーク信号線及び第2の外部ネットワーク信号線を介して第1の処理装置にも送信されると共に、第1の処理装置及び第2の処理装置は、第1のA系アクチュエータ、第1のB系アクチュエータ、第2のA系アクチュエータ及び第2のB系アクチュエータの制御量を演算するものであることを特徴とする。
【0012】
(4)第4の手段のエンジン制御装置は、第3の手段において、第1の処理装置及び第2の処理装置は、第1の外部ネットワーク信号線を介して送信された計測値と第2の外部ネットワーク信号線を介して送信された計測値とを比較し、第1の外部ネットワーク信号線又は第2の外部ネットワーク信号線の故障の有無を判断するものであることを特徴とする。
【0013】
(5)第5の手段のエンジン制御装置は、第3又は4の手段において、第1の処理装置及び第2の処理装置は、計測値が第1の外部ネットワーク信号線及び第2の外部ネットワーク信号線を介して送信しないときに送信元の第1の処理装置又は第2の処理装置が故障していると判断するものであることを特徴とする。
【0014】
(6)第6の手段のエンジン制御装置は、第5の手段において、第1の処理装置は、第2のB系入出力装置、第2のB系通信装置及び第1のA系通信装置を介して第2のB系センサから計測値を入力すると共に第2のB系アクチュエータの制御量を演算し制御し、第2の処理装置は、第1のB系入出力装置、第1のB系通信装置及び第2のA系通信装置を介して第1のB系センサから計測値を入力すると共に第1のB系アクチュエータの制御量を演算し制御するものであることを特徴とする。
【発明の効果】
【0015】
上述したように本発明のエンジン制御装置は、2台のエンジンの制御系統が、各々2重に設けられた冗長構成をなしているにも係わらず、センサからの計測値に基づいてアクチュエータの制御量を演算する処理装置は各々1台のみであり、制御装置製造費用の削減、制御装置重量の軽減、制御装置の小型化を実現することができる。
また、第1の処理装置に接続された第1のA系通信装置と第2の処理装置に接続された第2のA系通信装置とは、第1の外部ネットワーク信号線と第2の外部ネットワーク信号線とにより二重に接続されており、通信の信頼性が向上する。
更に、第1の処理装置及び第2の処理装置の双方にて、第1のエンジン及び第2のエンジンの制御量を演算しており、第1の処理装置又は第2の処理装置のどちらかが故障しても、第1の処理装置又は第2の処理装置にて、第1のエンジン及び第2のエンジンを制御することが可能となる。
【発明を実施するための最良の形態】
【0016】
以下、本発明の実施の形態について図面に従って説明する。
しかしながら、本発明の技術的範囲はかかる実施の形態によって限定されるものではなく、特許請求の範囲に記載された発明とその均等物に及ぶものである。
【0017】
図1は、本発明の第1の実施の形態に係るエンジン制御装置の全体構成図、図2〜図12は、本発明の第1の実施の形態に係る制御フロー図である。
【0018】
[第1の実施の形態の全体構成]
図1に基づき、本発明の第1の実施の形態に係るエンジン制御装置の全体構成を説明する。
全体構成は、次のようになっている。
各種センサやアクチュエータをそれぞれ持つ第1のエンジン11、第2のエンジン21と、前記各種センサから計測値を入手し、当該計測値から制御演算に使用する値(以降、入力値と呼ぶ)を決定し、外部指令表示装置1からの指令値と入力値とを比較し複数のエンジンへ供給する燃料量等(以降、制御量と呼ぶ)を演算で求め、各アクチュエータへの制御指令を行う第1の制御装置10、第2の制御装置20と、各種センサからの計測値、入力値や故障情報を乗務員に伝達し、また乗務員からの指示を入力するための外部指令表示装置1とから構成される。
【0019】
[第1の制御装置と第1のエンジンの説明]
続いて個々の構成を説明する。
まず、第1の制御装置10と第1のエンジン11について説明する。
第1の制御装置10内部は、各種データを受信して判定、演算、制御量の算出等の処理を行うCPUを備えた第1の処理装置13を有するA系統と、処理装置の無いB系統により構成されている。
【0020】
以下具体的に説明する。
A系統は、第1のA系通信装置12a、第1の処理装置13、第1のA系入出力装置14aから構成され、互いに接続されている。
第1のA系通信装置12aは、第1のA系外部用インタフェース17aと第1のA系内部用インタフェース18aを備えている。
この第1のA系外部用インタフェース17a、及び第1のA系内部用インタフェース18aは、各々第1の処理装置13に接続されている。
【0021】
B系統は、第1のB系通信装置12b、第1のB系入出力装置14bから構成され、互いに接続されている。
第1のB系通信装置12bは、第1のB系外部用インタフェース17bと第1のB系内部用インタフェース18bを備えている。
なお、この第1のB系通信装置12b等は、後述するように簡単なCPUを備えている。
【0022】
また、第1のA系内部用インタフェース18aと第1のB系内部用インタフェース18bとは、第1の内部ネットワーク信号線NL3により接続されている。
【0023】
第1の制御装置10のA、B系統に対応するように、第1のエンジン11の駆動系統及びセンサ類もA、B系統に分かれている。
第1のエンジン11の第1のA系センサ15a及び第1のA系アクチュエータ16aは、入出力信号線L1によって第1のA系入出力装置14aと接続されている。
そして、第1のA系通信装置12a、第1の処理装置13、第1のA系入出力装置14a、第1のA系センサ15a及び第1のA系アクチュエータ16aにより、第1の制御A系統ASL1が構成されている。
上述の構成において、第1の処理装置13により、第1のA系センサ15aからの計測値の受信や、第1のA系アクチュエータ16aへの制御指令が、第1のA系入出力装置14a及び入出力信号線L1を通して行われる。
【0024】
一方、第1のエンジン11の第1のB系センサ15b及び第1のB系アクチュエータ16bは、入出力信号線L2によって第1のB系入出力装置14bと接続されている。
そして、第1のB系通信装置12b、第1のB系入出力装置14b、第1のB系センサ15b及び第1のB系アクチュエータ16bにより、第1の制御B系統BSL1が構成されており、この第1の制御B系統BSL1には、判定、演算、制御量の算出等の処理を行う第1の処理装置13に相当するものが無い。
【0025】
なお、センサ及びアクチュエータの具体例の1つとしては、エンジンへ供給する燃料供給量の制御である。
即ち、第1のエンジン11への図示略の燃料供給管の流量制御弁には、パルスモータ等の第1のA系アクチュエータ16a及び第1のB系アクチュエータ16bが連結されており、この各アクチュエータ16a、16bには、各々ポテンションメータ等の第1のA系センサ15a、第1のB系センサ15bが設けられている。
そして、第1のA系アクチュエータ16aにて流量制御弁を制御している時は、第1のB系アクチュエータ16bは連れ動かされている。
このとき、故障していなければ、第1のA系センサ15a及び第1のB系センサ15bは、ほぼ同じ計測値を出力する。
【0026】
上述の構成において、通常運転時においては、第1の処理装置13により、第1のA系センサ15aからの計測値の受信や、第1のA系アクチュエータ16aへの制御指令が、第1のA系入出力装置14aを通して行われる。
なお、通常運転時においては、第1の処理装置13により、第1のB系センサ15bからの計測値の受信や、第1のB系アクチュエータ16bへの制御指令が、第1のB系入出力装置14b、第1のB系内部用インタフェース18b、第1の内部ネットワーク信号線NL3及び第1のA系内部用インタフェース18aを通して行われることもある。
【0027】
また、後述するように、異常時(第1のA系通信装置12a、第1の処理装置13、第1のA系入出力装置14a、第1のA系センサ15a及び第1のA系アクチュエータ16aのいずれかが故障)には、後述する第2の制御装置20内の第2の処理装置(CPU)23により、第1のB系センサ15bからの計測値の受信や、第1のB系アクチュエータ16bへの制御指令が、第1のB系入出力装置14b、第1のB系外部用インタフェース17b、第2の外部ネットワーク信号線NL2を通して行われる。
【0028】
なお、第1のB系センサ15b及び第1のB系アクチュエータ16bと第1のB系入出力装置14bとの間、及び、第1のB系入出力装置14bと第1のB系通信装置12bとの間は、各センサ及びアクチュエータの数に応じた信号線が存在する(例えば、B系において、センサが3個、アクチュエータが2個の場合は合計5系統)。
そして、第1のB系通信装置12b(或いは第1のB系入出力装置14b)は、上述の複数の信号をネットワーク信号線NL2、NL3に載せるべく、送信先エリア、発信元エリア、各種データエリアのデータ列に変換して送信し、或いは、送信されてきたネットワーク信号の内、必要なデータのみを選別、抽出するために、又は、第2のB系内部用インタフェース28bと第2のB系外部用インタフェース27bとの間の送受信データの接続のための最低限の処理機能(簡単なCPU)を有している。
一方、第1のA系通信装置12aは、上記機能を第1の処理装置13が行うため、上述のデータ列変換機能等は無くても良い。
【0029】
[第2の制御装置と第2のエンジンの説明]
次に、第2の制御装置20と第2のエンジン21について説明する。
第2の制御装置20は、第1の制御装置10と、第2のエンジン21は、第1のエンジン11とそれぞれ同じ構成をしており、それぞれの内部も、同様にA、B系統に分かれている。
【0030】
すなわち、第2の制御装置20のA系統は、第2のA系通信装置22a、各種データを受信して判定、演算、制御量の算出等の処理を行うCPUを備えた第2の処理装置23及び第2のA系入出力装置24aから構成され、B系統は、第2のB系通信装置22b、第2のB系入出力装置24bから構成されている。
また、第2のエンジン21のA系統は、第2のA系センサ25a、第2のA系アクチュエータ26aから構成され、B系統は、第2のB系センサ25b及び第2のB系アクチュエータ26bから構成されている。
【0031】
そして、第2のA系通信装置22a、第2の処理装置23、第2のA系入出力装置24a、第2のA系センサ25a及び第2のA系アクチュエータ26aにより、第2の制御A系統ASL2が構成されている。
また、第2のB系通信装置22b、第2のB系入出力装置24b、第2のB系センサ25b及び第2のB系アクチュエータ26bにより、第2の制御B系統BSL2が構成されており、この第2の制御B系統BSL2には、処理装置23に相当するものが無い。
【0032】
第2のA系通信装置22aは、第2のA系外部用インタフェース27aと第2のA系内部用インタフェース28aを備え、第2のB系通信装置22bは、第2のB系外部用インタフェース27bと第2のB系内部用インタフェース28bを備えている。
また、第2のA系内部用インタフェース28aと第2のB系内部用インタフェース28bとは、第2の内部ネットワーク信号線NL4により接続されている。
なお、第2のエンジン21の第2のA系センサ25a及び第2のA系アクチュエータ26aは、入出力信号線L3によって第2のA系入出力装置24aに接続され、第2のエンジン21の第2のB系センサ25b及び第2のB系アクチュエータ26bは、入出力信号線L4によって第2のB系入出力装置24bに接続されている。
【0033】
即ち、第2の制御A系統ASL2は、第1の制御A系統ASL1と同一の構成であり、第2の制御B系統BSL2も第1の制御B系統BSL1と同一の構成である。
【0034】
更に、第2のB系外部用インタフェース27bは、第1の外部ネットワーク信号線NL1により、外部指令表示装置1及び第1の制御装置10の第1のA系外部用インタフェース17aと接続され、第2のA系外部用インタフェース27aは、第2の外部ネットワーク信号線NL2により、外部指令表示装置1及び第1の制御装置10の第1のB系外部用インタフェース17bと接続されている。
【0035】
上述の構成において、第1の制御装置10と同様に、通常運転時においては、第2の処理装置23により、第2のA系センサ25aからの計測値の受信や、第2のA系アクチュエータ26aへの制御指令が、第2のA系入出力装置24aを通して行われる。
なお、通常運転時においては、第2の処理装置23により、第2のB系センサ25bからの計測値の受信や、第2のB系アクチュエータ26bへの制御指令が、第2のB系入出力装置24b、第2のB系内部用インタフェース28b、第2の内部ネットワーク信号線NL4及び第2のA系内部用インタフェース28aを通して行われることもある。
【0036】
また、後述するように、異常時(第2のA系通信装置22a、第2の処理装置23、第2のA系入出力装置24a、第2のA系センサ25a及び第2のA系アクチュエータ26aのいずれかが故障)には、第1の制御装置10内の第1の処理装置(CPU)13により、第2のB系センサ25bからの計測値の受信や、第2のB系アクチュエータ26bへの制御指令が、第2のB系入出力装置24b、第2のB系外部用インタフェース27b、第1の外部ネットワーク信号線NL1を通して行われる。
【0037】
[ネットワークの説明]
次に、第1、2制御装置10、20間を接続するネットワークについて説明する。
本実施の形態に係るネットワークは、次の二つのネットワーク経路X、Yが形成されている。
(A)ネットワーク経路X:
・第1の処理装置13
・第1のA系通信装置12a内の第1のA系外部用インタフェース17a
・第1の外部ネットワーク信号線NL1
・第2のB系通信装置22b内の第2のB系外部用インタフェース27b
・第2のB系通信装置22b内の第2のB系内部用インタフェース28b
・第2の内部ネットワーク信号線NL4
・第2のA系通信装置22a内の第2のA系内部用インタフェース28a
・第2の処理装置23
(B)ネットワーク経路Y:
・第1の処理装置13
・第1のA系通信装置12a内の第1のA系内部用インタフェース18a
・第1の内部ネットワーク信号線NL3
・第1のB系通信装置12b内の第1のB系内部用インタフェース18b
・第1のB系通信装置12b内の第1のB系外部用インタフェース17b
・第2の外部ネットワーク信号線NL2
・第2のA系通信装置22a内の第2のA系外部用インタフェース27a
・第2の処理装置23
なお、上述の二つのネットワーク経路X、Yは、各々双方向性である。
【0038】
そして、第1の処理装置13から第2の処理装置23へは、ネットワーク経路X、Yを通じて、所定時間(例えば、CPUの演算周期)毎に、最新の次のデータ等が、各ステップ毎(図2以降に図示)に送信される。
なお、第1のエンジン用の計測値、入力値、選定入力値、制御量、選定制御量は、単に「第1用」と称し、第2のエンジン用は「第2用」と称する。
・送信先(外部指令表示装置1、第2の処理装置23のどちらに送信するのかを区別)
・発信元
・第1のA系センサ15aからの第1用計測値1A(1AX、1AY)
・第1のB系センサ15bからの第1用計測値1B(1BX、1BY)
・第1の制御装置10における第1用入力値11(11X、11Y)
・第2の制御装置20における第2用入力値12(12X、12Y)
・第1の制御装置10における第1用制御量11(11X、11Y)
・第2の制御装置20における第2用制御量12(12X、12Y)
・第1の制御装置10内の各装置の故障情報
【0039】
また、第2の処理装置23から第1の処理装置13へも、ネットワーク経路X、Yを通じて、所定時間(例えば、CPUの演算周期毎)に、最新の次のデータ等が、各ステップ毎(図2以降に図示)に送信される。
・送信先(外部指令表示装置1、第2の処理装置23のどちらに送信するのかを区別)
・発信元
・第2のA系センサ25aからの第2用計測値2A(2AX、2AY)
・第2のB系センサ25bからの第2用計測値2B(2BX、2BY)
・第1の制御装置10における第1用入力値21(21X、21Y)
・第2の制御装置20における第2用入力値22(22X、22Y)
・第1の制御装置10における第1用制御量21(21X、21Y)
・第2の制御装置20における第2用制御量22(22X、22Y)
・第2の制御装置20内の各装置の故障情報
【0040】
そして、第1の処理装置13及び第2の処理装置23では、後述するように、上述の計測値、入力値、制御量の演算、共有化が、ステップ毎に行われる。
【0041】
また、上述のごとく、外部指令表示装置1は、第1の外部ネットワーク信号線NL1及び第2の外部ネットワーク信号線NL2に接続されている。
そして、外部指令表示装置1と第1の処理装置13との間も、第1の外部ネットワーク信号線NL1、第1のA系外部用インタフェース17aの経路と、第2の外部ネットワーク信号線NL2、第1のB系通信装置12b、第1の内部ネットワーク信号線NL3、第1のA系内部用インタフェース18aの経路との、二つの経路が存在する。
【0042】
そして、外部指令表示装置1から第1の処理装置13へ、上述の二つの経路を通じて、第1のエンジン11(第1のA系アクチュエータ16a又は第1のB系アクチュエータ16b)、及び第2のエンジン21(第2のA系アクチュエータ26a又は第2のB系アクチュエータ26b)への指令値等が送信される。
また、第1の処理装置13から外部指令表示装置1へ、上述の二つの経路を通じて、第1のA系センサ15a、第1のB系センサ15bからの計測値、後述する入力値、使用しているアクチュエータの番号、第1のA系アクチュエータ16a又は第1のB系アクチュエータ16bへの制御量、故障情報等が送信される。
【0043】
また、外部指令表示装置1と第2の処理装置23との間も、第2の外部ネットワーク信号線NL2、第2のA系外部用インタフェース27aの経路と、第1の外部ネットワーク信号線NL1、第2のB系通信装置22b、第2の内部ネットワーク信号線NL4、第2のA系内部用インタフェース28aの経路との、二つの経路が存在する。
【0044】
そして、外部指令表示装置1から第2の処理装置23へ、上述の二つの経路を通じて、第1のエンジン11(第1のA系アクチュエータ16a又は第1のB系アクチュエータ16b)、及び第2のエンジン21(第2のA系アクチュエータ26a又は第2のB系アクチュエータ26b)への指令値等が送信される。
また、第2の処理装置23から外部指令表示装置1へ、上述の二つの経路を通じて、第2のA系センサ25a、第2のB系センサ25bからの計測値、後述する入力値、使用しているアクチュエータの番号、第2のA系アクチュエータ26a又は第2のB系アクチュエータ26bへの制御量、故障情報等が送信される。
【0045】
このように、外部指令表示装置1、第1の処理装置13、第2の処理装置23の間は、各々二つの経路が存在しており、各通信装置の内部用インタフェース、外部用インタフェース、またはネットワーク信号線のいずれか1つが故障しても、二つある経路の残りの経路を使用してデータ通信を行うことができ、通信の信頼性が高くなっている。
【0046】
また、従来は、A、B系センサ、アクチュエータ毎に各種データを受信して判定、演算、制御量の算出等の処理を行うCPUを有する処理装置(CPU)を備えて、例えば、第1のA系においては、第1のA系センサから計測値を受信し、各種データを受信して判定、演算、制御量の算出等の処理を行うCPUを有する第1のA系処理装置で制御量を演算し、第1のA系アクチュエータを制御し、第1のB系においては、第1のB系センサから計測値を受信し、各種データを受信して判定、演算、制御量の算出等の処理を行うCPUを有する第1のB系処理装置で制御量を演算し、第1のB系アクチュエータを制御していた。
【0047】
これに対し、上述の本発明の第1の実施の形態に係るエンジン制御装置においては、例えば、第1のエンジン11の第1のA系センサ15a、第1のB系センサ15bからの計測値を第1の処理装置13のみならず、第2の処理装置23にも送信し、各処理装置13、23の双方にてこれらの計測値の有効性を確認、共有化し、その後、外部指令表示装置1からの制御指令値に基づき、各処理装置13、23の双方にて独自に第1のエンジン11の制御量を演算し、この制御量を更に各処理装置13、23の双方にて独自に有効性を確認、共有化し、その後、第1のエンジン11の第1のA系アクチュエータ16a(或いは、第1のB系アクチュエータ16b)を制御する。
【0048】
第2のエンジン21についても、上述と同等に、各処理装置13、23の双方にて独自に計測値、制御量の有効性を確認、共有化して、第2のエンジン21の第2のA系アクチュエータ26a(或いは、第2のB系アクチュエータ26b)を制御する。
【0049】
このように、ネットワーク信号線を二重化し、且つ、計測値、制御量を両方の処理装置で行い、有効性を確認、共有化することにより、各種データを受信して判定、演算、制御量の算出等の処理を行うCPUを有する処理装置の台数を従来の半分にしたにも係わらず、信頼性の高い制御装置を得ることができる。
【0050】
[エンジン制御]
次に、図2〜図12に基づき、エンジン制御における各種のデータの処理、共有化処理、アクチュエータの制御につき説明する。
図2は、本発明の第1の実施の形態に係るエンジン制御におけるセンサ計測値入手、共有化処理のフロー図である。
図3は、本発明の第1の実施の形態に係るエンジン制御における入力値共有処理のフロー図である。
図4は、本発明の第1の実施の形態に係るエンジン制御における制御量演算処理のフロー図である。
図5は、本発明の第1の実施の形態に係るエンジン制御における制御量共有処理のフロー図である。
図6は、本発明の第1の実施の形態に係るエンジン制御におけるアクチュエータ制御のフロー図である。
図7、図8は、図2における受信処理、選定処理のフロー図である。
図9、図10は、図3における受信処理、選定処理、のフロー図である。
図11、図12は、図5における受信処理、選定処理、のフロー図である。
なお、図7〜図12は、第1の制御装置10における制御フローを図示したものであるが、第2の制御装置20においても図7〜図12と同様の処理が行われる。
【0051】
[センサ計測値入手処理]
先ず、図2、図7、図8に基づき、センサ計測値入手処理、計測値受信処理、計測値選定処理につき説明する。
図2に図示のように、第1の処理装置13、第2の処理装置23は、共にセンサ計測値入手処理を開始する(ステップS1)。
図1に図示の第1の制御装置10において、第1のエンジン11内の第1のA系センサ15aからの第1用計測値1Aは、第1のA系入出力装置14aを経て第1の処理装置13に送信され、第1の処理装置13内のメモリに保存される(ステップS2)。
また、第1のエンジン11内の第1のB系センサ15bからの第1用計測値1Bは、第1のB系入出力装置14b、第1のB系通信装置12b、第1の内部ネットワーク信号線NL3、第1のA系通信装置12aを経て第1の処理装置13に送信され、第1の処理装置13内のメモリに保存される(ステップS3)。
【0052】
同様に、図1に図示の第2の制御装置20において、第2のエンジン21内の第2のA系センサ25aからの第2用計測値2Aは、第2のA系入出力装置24aを経て第2の処理装置23に送信され、第2の処理装置23内のメモリに保存される(ステップS2)。
また、第2のエンジン21内の第2のB系センサ25bからの第2用計測値2Bは、第2のB系入出力装置24b、第2のB系通信装置22b、第2の内部ネットワーク信号線NL4、第2のA系通信装置22aを経て第2の処理装置23に送信され、第2の処理装置23内のメモリに保存される(ステップS3)。
【0053】
このように、ステップS2、S3の処理により、第1の処理装置13は、第1用計測値1Aと第1用計測値1Bを、第2の処理装置23は、第2用計測値2Aと第2用計測値2Bをそれぞれ受信しメモリに記憶する。
なお、この時点では、第1の処理装置13では第1用計測値1Aと第1用計測値1Bとが一致するか否か、又、第2の処理装置23では第2用計測値2Aと第2用計測値2Bとが一致するか否か等の判断は行わない。
【0054】
[センサ計測値共有処理]
次に、図2に図示のように、ステップS2、S3で得た第1用計測値1A、第1用計測値1B、第2用計測値2A、第2用計測値2Bを共有するため、第1の処理装置13、第2の処理装置23は、センサ計測値共有処理を開始する(ステップS4)。
このとき、上述の図1に基づき述べたように、第1の処理装置13、第2の処理装置23間のデータの送受信は、ネットワーク経路X、Yを経由して行われる。
【0055】
第1の処理装置13は、第1用計測値1A及び第1用計測値1Bを、第1用計測値1AX及び第1用計測値1BXとして、ネットワーク経路Xを使用して第2の処理装置23に送信する(ステップS5)。
2つ目の経路としてネットワーク経路Yを使用し、第1用計測値1A及び第1用計測値1Bを、第1用計測値1AY及び第1用計測値1BYとして、第2の処理装置23に送信する(ステップS6)。
【0056】
同様に、第2の処理装置23も、第2用計測値2A及び第2用計測値2Bを、第2用計測値2AX及び第2用計測値2BXとして、ネットワーク経路Xを使用して第1の処理装置13に送信する(ステップS5)。
2つ目の経路としてネットワーク経路Yを使用し、第2用計測値2A及び第2用計測値2Bを、第2用計測値2AY及び第2用計測値2BYとして、第1の処理装置13に送信する(ステップS6)。
【0057】
そして、第1の処理装置13は、センサ計測値共有化処理を開始(ステップS4)すると、データ受信処理を開始し、第2の処理装置23から送信されるデータを待つ(ステップS7)。
同様に、第2の処理装置23も、センサ計測値共有化処理を開始(ステップS4)すると、データ受信処理を開始し、第1の処理装置13から送信されるデータを待つ(ステップS7)。
【0058】
(計測値受信処理)
そして、図2、図7に図示のように、第1の処理装置13及び第2の処理装置23では、各々、二つのネットワーク経路X、Yからデータが受信されたか否か等の計測値受信処理を開始する(ステップS7)。
【0059】
この計測値受信処理においては、次の4通りのケースがある。
計測値送受信ケース1:所定の時間内に、二つのネットワーク経路X、Yの双方から各データを受信し、且つ、各データが一致した場合。
計測値送受信ケース2:所定の時間内に、二つのネットワーク経路X、Yの内、1経路からのみ各データを受信した場合。
計測値送受信ケース3:所定の時間内に、二つのネットワーク経路X、Yの双方から各データを受信したが、受信したデータが異なる場合。
計測値送受信ケース4:所定の時間を経過しても、二つのネットワーク経路X、Yの双方共に各データの受信が無い場合。
所定の時間とは、一方の第1の処理装置13(又は第2の処理装置23)が、他の第2の処理装置23(又は第1の処理装置13)にデータを送信してから受信するまでの正常時における最長ケースの時間以上の時間を適宜設定すればよい。
【0060】
先ず、第1の処理装置13は、計測値受信処理(ステップS7)において、ネットワーク経路X、Yから第2用計測値2AX、第2用計測値2AY、第2用計測値2BX、第2用計測値2BYを受信しバッファメモリ等に一次的に保存する作業を行う。
そして、バッファメモリ内の各データにつき、各データの受信があったか(ステップS7a、S7b)、各データが一致するか否かの確認(ステップS7c)、判定等を行う。
【0061】
計測値送受信ケース1の場合、第1の処理装置13では、所定の時間内に二つのネットワーク経路X、Yの双方からデータを受信したとき、各装置やネットワークに故障がなければ、バッファメモリ内の各データは、第2用計測値2AX=第2用計測値2AY、第2用計測値2BX=第2用計測値2BYとなるはずである(ステップS7a、S7b、S7c)。
バッファメモリに記憶された各データが一致した場合、バッファメモリ内の第2用計測値2AX又は第2用計測値2AYを、第2用計測値2Aとして、第2用計測値2BX又は第2用計測値2BYを、第2用計測値2Bとしてメモリに保存し(ステップS7d)、バッファメモリ内の各データについては有効フラグをリセットする等の処理を行う。
このようにして、第1の処理装置13のメモリ内には、ステップ2、3により入手した第1用計測値1A及び第1用計測値1B、ネットワーク経路X、Yにより受信したデータに基づく第2用計測値2A及び第2用計測値2Bが保存され、計測値受信処理(ステップS7)を終了する。
【0062】
同様に、第2の処理装置23も、計測値受信処理(ステップS7)において、ネットワーク経路X、Yから第1用計測値1AX、第1用計測値1AY、第1用計測値1BX、第1用計測値1BYを受信しバッファメモリ等に一次的に保存する作業を行う。
そして、第2の処理装置23は、バッファメモリ内の各データにつき、各データの受信があったか、各データが一致するか否かの確認、判定等を行う。
バッファメモリに記憶された各データが一致した場合、バッファメモリ内の第1用計測値1AX又は第1用計測値1AYを、第1用計測値1Aとして、第1用計測値1BX又は第1用計測値1BYを、第1用計測値1Bとしてメモリに保存し、バッファメモリ内の各データについては有効フラグをリセットする等の処理を行う。
このようにして、第2の処理装置23のメモリ内には、ステップ2、3により入手した第2用計測値2A及び第2用計測値2B、ネットワーク経路X、Yにより受信したデータに基づく第1用計測値1A及び第1用計測値1Bが保存され、計測値受信処理(ステップS7)を終了する。
【0063】
計測値送受信ケース1の場合、第1の処理装置13及び第2の処理装置23の各メモリには、各々、第1用計測値1A、第1用計測値1B、第2用計測値2A、第2用計測値2Bが保存されることになる。
【0064】
計測値送受信ケース2の、所定の時間内にネットワーク経路X、又はネットワーク経路Yのどちらか一方からしか各データを受信できなかった場合(ステップS7b)、受信し保存されたバッファメモリ内の各データを第1の処理装置13又は第2の処理装置23のメモリに保存し(ステップS7h)、計測値受信処理(ステップS7)は終了する。
これは、ネットワーク経路X、又はネットワーク経路Yのうち、どちらかの一方の経路で故障が発生したと考えられる。
ネットワーク経路に故障が発生しても、エンジン制御を停止させないために、受信した各データを優先して使用するものである。
【0065】
例えば、ネットワーク経路Yが故障した場合は、第1用計測値1AY、第1用計測値1BY、第2用計測値2AY、及び第2用計測値2BYは送受信されず、第1用計測値1AX、第1用計測値1BX、第2用計測値2AX、及び第2用計測値2BXのみが送受信される。
計測値送受信ケース2の場合も、第1の処理装置13及び第2の処理装置23の各メモリには、各々、第1用計測値1A、第1用計測値1B、第2用計測値2A、第2用計測値2Bが保存される。
【0066】
計測値送受信ケース3の、所定の時間内に、二つのネットワーク経路X、Yの双方から各データを受信したが、受信した各データが異なる場合(例えば、第1用計測値1AX≠第1用計測値1AY、第2用計測値2AX≠第2用計測値2AY、等)(ステップS7c)、受信し一次的に保存されたバッファメモリ内の各データは使用せず、第1の処理装置13又は第2の処理装置23ではメモリに記憶されている前回値を使用し(ステップS7i)、バッファメモリ内の各データについては有効フラグをリセットする等の処理を行う。
前回値とは、これ以前の時点で、第1の処理装置13及び第2の処理装置23のメモリに保存された、処理済みの各データのことである。
【0067】
例えば、第2用計測値2AX≠第2用計測値2AY、第2用計測値2BX≠第2用計測値2BYの場合、第1の処理装置13のメモリには、第1用計測値1A、第1用計測値1B、前回の第2用計測値2A、前回の第2用計測値2Bが保存される。
一方、第2の処理装置23のメモリには、受信した各計測値は一致しているので、第1用計測値1A、第1用計測値1B、第2用計測値2A、第2用計測値2Bが保存される。
【0068】
計測値送受信ケース4の、所定の時間を経過しても、第1の処理装置13(又は第2の処理装置23)において、二つのネットワーク経路X、Yの双方共に第2の処理装置23(又は第1の処理装置13)からの各データの送信が無い場合(ステップS7a)、第2の処理装置23(又は第1の処理装置13)に故障が発生しているものと判定し、後述する故障処理(ステップS7e)を行う。
【0069】
なお、計測値送受信ケース4の場合、例えば第2の処理装置23が故障したときは、第1の処理装置13のメモリには、第1用計測値1A、第1用計測値1B、0(第2用計測値2A無し)、0(第2用計測値2B無し)が保存される。
【0070】
即ち、第1の処理装置13又は第2の処理装置23そのものが故障した場合、故障箇所の連絡を処理する手段がなく、連絡ができない。
従って、所定時間経過後も各データの受信が全くないのは、送信されるはずのデータが用意できない(処理装置の故障)と判定する。
【0071】
このようにして、所定の時間を経過しても全くデータ受信が無いことを確認することにより、送信側の処理装置に故障が発生していないか監視することが可能となる。
また、第1の処理装置13と第2の処理装置23との間を結ぶネットワーク経路X、Yを構成する装置及び信号線に故障が発生していないか監視でき、仮にネットワーク経路X又はネットワーク経路Yの一方が故障してデータの送受信には使用できなくても、処理を続行することが可能であり、エンジン制御の信頼性を高めている。
また、図示はしないが、送信するデータにパリティビットを付与し、受信側でパリティチェックを行えばエラー訂正をより正確に行うこともできる。
【0072】
計測値送受信ケース4の場合、第1の処理装置13にて、第2のB系センサ25bの計測値2Bを直接入手し(ステップS7f)、第2のエンジンの制御も行う(ステップS7g)。
【0073】
(計測値選定処理)
次に、図2、図7、図8に図示の計測値選定処理(ステップS8)につき、説明する。
上述の、所定の時間内に、二つのネットワーク経路X、Yの双方からデータを受信した場合(計測値送受信ケース1)、及び所定の時間内に、二つのネットワーク経路X、Yの内、1経路からのみデータを受信した場合(計測値送受信ケース2)には、上述のごとく、第1の処理装置13内のメモリ、及び第2の処理装置23内のメモリには、各々、第1用計測値1A、第1用計測値1B、第2用計測値2A、第2用計測値2Bが保存されている。
【0074】
そして、これらの保存された各データに基づき、第1の処理装置13、第2の処理装置23は、計測値選定処理を開始する(ステップS8)。
計測値選定処理は、第1のエンジン11の第1のA系センサ15a、第1のB系センサ15B、第2のエンジン21の第2のA系センサ25a、第2のB系センサ25bで故障しているセンサがないかを判定し、有効(すなわち、故障していない)と判定されたセンサのセンサ計測値を入力値(制御演算に使用する値)として決定する処理である。
判定は、双方の第1の処理装置13、第2の処理装置23において個別に行われる。
【0075】
計測値選定処理における故障しているセンサの判定法は、例えば、第1の処理装置13においては、次のようにして行われる。
先ず、第1の処理装置13内のメモリに記憶された第1のA系センサ15aからの第1用計測値1Aと第1のB系センサ15bからの第1用計測値1Bとの双方共に受信したか否かを確認する(ステップS8a)。
もし、どちらからも受信がなければ、故障処理を開始する(ステップS8e)。
即ち、第1の制御装置10による第1のエンジンの制御をオフにし、第2の制御装置20による第1のエンジンの制御に切り換える(ステップS8f)。
【0076】
次に、第1の処理装置13内のメモリに記憶された第1のA系センサ15aからの第1用計測値1A、第1のB系センサ15bからの第1用計測値1Bのどちらか一方のみの入手か否かを判定する(ステップS8b)。
そして、同じエンジンに対するセンサ計測値が1つしかない場合は、ある方の各データを採用し、第1用入力値11及び第2用入力値12を、第1の処理装置13内のメモリに保存し(ステップS8g)、入手した計測値が第1用計測値1Bの場合は、第1の制御B系統に切り換える(ステップS8h)。
【0077】
次に、第1の処理装置13内のメモリに記憶された第1のA系センサ15aからの第1用計測値1Aと第1のB系センサ15bからの第1用計測値1Bとが一致するか否かを判定する(ステップS8c)。
更に、第2の処理装置23から送信された第2用計測値2Aと第2用計測値2Bとが一致するかも判定する。
そして、一致すれば、センサに故障はなく、第1用計測値1A又は第1用計測値1Bを、第1用入力値11として、第2用計測値2A又は第2用計測値2Bを、第2用入力値12として、第1の処理装置13内のメモリに保存し終了する(ステップS8d)。
【0078】
各センサ計測値が一致しなければ、どちらかのセンサが故障しているとし、第3のデータと比較して値が近い方を第1用入力値11及び第2用入力値12として保存する(ステップS8i)。
第3のデータの例としては、他エンジンのセンサ計測値や、理論的なモデル式、後述する外部指令表示装置1からの制御量に対する応答性等から導かれる推定値を使用する。
このようにして、第1の処理装置13は、第1用計測値1A及び又は第1用計測値1Bから第1のエンジン11に対する第1用入力値11と、第2用計測値2A及び又は第2用計測値2Bから第2のエンジン21に対する第2用入力値12を選定する。
【0079】
第2の処理装置23においても、上述の第1の処理装置13と同様の処理を行う。
即ち、第2の処理装置23内のメモリに記憶された第2のA系センサ25aからの第2用計測値2Aと第2のB系センサ25bからの第2用計測値2Bとが一致するか否かを判定する。
更に、メモリに記憶された第1の処理装置13から送信された第1用計測値1Aと第1用計測値1Bとが一致するかを判定する。
そして、第1の処理装置13と同様の処理を行い、第1用計測値1A及び又は第1用計測値1Bから第1のエンジン11に対する第1用入力値21と、第2用計測値2A及び又は第2用計測値2Bから第2のエンジン21に対する第2用入力値22を選定する。
【0080】
なお、上述の計測値送受信ケース3において、第2用計測値2AX≠第2用計測値2AY、第2用計測値2BX≠第2用計測値2BYで前回の計測値が記憶されている場合にも、第1の処理装置13は、前回の第2用計測値2Aと前回の第2用計測値2Bとが一致するか否かを判定して、第2用入力値12を選出する。
【0081】
[入力値共有処理]
次に、図3に図示のように、図2に図示のステップS8で得た第1用入力値11、第2用入力値12、第1用入力値21、第2用入力値22を共有するため、第1の処理装置13、第2の処理装置23は、個別に入力値共有処理を開始する(ステップS10)。
図1に基づき説明したように、第1の処理装置13と第2の処理装置23との間の各データの送受信は、二つのネットワーク経路X、Yを経由して行われる。
【0082】
第1の処理装置13は、第1用入力値11及び第2用入力値12を、第1用入力値11X及び第2用入力値12Xとして、ネットワーク経路Xを使用して第2の処理装置23に送信する(ステップS11)。
2つ目の経路としてネットワーク経路Yを使用し、第1用入力値11及び第2用入力値12を、第1用入力値11Y及び第2用入力値12Yとして、第2の処理装置23に送信する(ステップS12)。
【0083】
同様に、第2の処理装置23も、第1用入力値21及び第2用入力値22を、第1用入力値21X及び第2用入力値22Xとして、ネットワーク経路Xを使用して第1の処理装置13に送信する(ステップS11)。
2つ目の経路としてネットワーク経路Yを使用し、第1用入力値21及び第2用入力値22を、第1用入力値21Y及び第2用入力値22Yとして、第1の処理装置13に送信する(ステップS12)。
【0084】
そして、第1の処理装置13は、入力値共有化処理を開始(ステップS10)すると、データ受信処理を開始し、第2の処理装置23から送信されるデータを待つ(ステップS13)。
同様に、第2の処理装置23も、入力値共有化処理を開始(ステップS10)すると、データ受信処理を開始し、第1の処理装置13から送信されるデータを待つ(ステップS13)。
【0085】
(入力値受信処理)
そして、図3、図9に図示のように、第1の処理装置13及び第2の処理装置23では、各々、二つのネットワーク経路X、Yからデータが受信されたか否か等の入力値受信処理を開始する(ステップS13)。
【0086】
この入力値受信処理においては、次の4通りのケースがある。
入力値送受信ケース1:所定の時間内に、二つのネットワーク経路X、Yの双方から各データを受信し、且つ、各データが一致した場合。
入力値送受信ケース2:所定の時間内に、二つのネットワーク経路X、Yの内、1経路からのみ各データを受信した場合。
入力値送受信ケース3:所定の時間内に、二つのネットワーク経路X、Yの双方から各データを受信したが、受信したデータが異なる場合。
入力値送受信ケース4:所定の時間を経過しても、二つのネットワーク経路X、Yの双方共に各データの受信が無い場合。
所定の時間とは、一方の第1の処理装置13(又は第2の処理装置23)が、他の第2の処理装置23(又は第1の処理装置13)にデータを送信してから受信するまでの正常時における最長ケースの時間以上の時間を適宜設定すればよい。
【0087】
先ず、第1の処理装置13は、入力値受信処理(ステップS13)において、ネットワーク経路X、Yから第1用入力値21X、第1用入力値21Y、第2用入力値22X、第2用入力値22Yを受信しバッファメモリ等に一次的に保存する作業を行う。
そして、バッファメモリ内の各データにつき、各データの受信があったか(ステップS13a、S13b)、各データが一致するか否かの確認(ステップS13c)、判定等を行う。
【0088】
入力値送受信ケース1の場合、第1の処理装置13では、所定の時間内に二つのネットワーク経路X、Yの双方からデータを受信したとき、各装置やネットワークに故障がなければ、バッファメモリ内の各データは、第1用入力値21X=第1用入力値21Y、第2用入力値22X=第2用入力値22Yとなるはずである(ステップS13a、S13b、S13c)。
バッファメモリに記憶された各データが一致した場合、バッファメモリ内の第1用入力値21X又は第1用入力値21Yを、第1用入力値21として、第2用入力値22X又は第2用入力値22Yを、第2用入力値22としてメモリに保存し(ステップS13d)、バッファメモリ内の各データについては有効フラグをリセットする等の処理を行う。
このようにして、第1の処理装置13のメモリ内には、ステップS8にて選出済みの第1用入力値11及び第2用入力値12、ネットワーク経路X、Yにより受信したデータに基づく第1用入力値21及び第2用入力値22が保存され、入力値受信処理(ステップS13)を終了する。
【0089】
同様に、第2の処理装置23も、入力値受信処理(ステップS13)において、ネットワーク経路X、Yから第1用入力値11X、第1用入力値11Y、第2用入力値12X、第2用入力値12Yを受信しバッファメモリ等に一次的に保存する作業を行う。
そして、第2の処理装置23は、バッファメモリ内の各データにつき、各データの受信があったか、各データが一致するか否かの確認、判定等を行う。
バッファメモリに記憶された各データが一致した場合、バッファメモリ内の第1用入力値11X又は第1用入力値11Yを第1用入力値11として、第2用入力値12X又は第2用入力値12Yを第2用入力値12としてメモリに保存し、バッファメモリ内の各データについては有効フラグをリセットする等の処理を行う。
このようにして、第2の処理装置23のメモリ内には、ステップS8にて選出済みの第1用入力値21及び第2用入力値22、ネットワーク経路X、Yにより受信したデータに基づく第1用入力値11及び第2用入力値12が保存され、入力値受信処理(ステップS13)を終了する。
【0090】
入力値送受信ケース1の場合、第1の処理装置13及び第2の処理装置23の各メモリには、各々、第1用入力値11、第2用入力値12、第1用入力値21、第2用入力値22が保存されることになる。
【0091】
入力値送受信ケース2の、所定の時間内にネットワーク経路X、又はネットワーク経路Yのどちらか一方からしか各データを受信できなかった場合(ステップS13b)、受信し保存されたバッファメモリ内の各データを第1の処理装置13又は第2の処理装置23のメモリに保存し(ステップS13g)、入力値受信処理(ステップS13)は終了する。
これは、ネットワーク経路X、又はネットワーク経路Yのうち、どちらかの一方の経路で故障が発生したと考えられる。
ネットワーク経路に故障が発生しても、エンジン制御を停止させないために、受信した各データを優先して使用するものである。
【0092】
例えば、ネットワーク経路Yが故障した場合は、第1用入力値11Y、第1用入力値21Y、第2用入力値12Y、及び第2用入力値22Yは送受信されず、第1用入力値11X、第1用入力値21X、第2用入力値12X、及び第2用入力値22Xのみが送受信される。
入力値送受信ケース2の場合も、第1の処理装置13及び第2の処理装置23の各メモリには、各々、第1用入力値11、第2用入力値12、第1用入力値21、第2用入力値22が保存される。
【0093】
入力値送受信ケース3の、所定の時間内に、二つのネットワーク経路X、Yの双方から各データを受信したが、受信した各データが異なる場合(例えば、第1用入力値11X≠第1用入力値11Y、第1用入力値21X≠第1用入力値21Y、等)(ステップS13c)、受信し一次的に保存されたバッファメモリ内の各データは使用せず、第1の処理装置13又は第2の処理装置23ではメモリに記憶されている前回値を使用し(ステップS13h)、バッファメモリ内の各データについては有効フラグをリセットする等の処理を行う。
前回値とは、これ以前の時点で、第1の処理装置13及び第2の処理装置23のメモリに保存された、処理済みの各データのことである。
【0094】
例えば、第1用入力値21X≠第1用入力値21Y、第2用入力値22X≠第2用入力値22Yの場合、第1の処理装置13のメモリには、第1用入力値11、第2用入力値12、前回の第1用入力値21、前回の第2用入力値22が保存されることになる。
一方、第2の処理装置23のメモリには、受信した各計測値は一致しているので、第1用入力値11、第2用入力値12、第1用入力値21、第2用入力値22が保存されることになる。
【0095】
入力値送受信ケース4の、所定の時間を経過しても、第1の処理装置13(又は第2の処理装置23)において、二つのネットワーク経路X、Yの双方共に第2の処理装置23(又は第1の処理装置13)からの各データの送信が無い場合、第1の処理装置13(又は第2の処理装置23)に故障が発生しているものと判定を行う。
【0096】
そして、入力値送受信ケース4の場合、第2の処理装置23が故障したときは、第1の処理装置13のメモリには、第1用入力値11、第2用入力値12、0(第1用入力値21無し)、0(第2用入力値22無し)が保存される(ステップS13f)。
【0097】
即ち、第1の処理装置13又は第2の処理装置23そのものが故障した場合、故障箇所の連絡を処理する手段がなく、連絡ができない。
従って、所定時間経過後も各データの受信が全くないのは、送信されるはずのデータが用意できない(処理装置の故障)と判定する。
【0098】
このようにして、所定の時間を経過しても全くデータ受信が無いことを確認することにより、送信側の処理装置に故障が発生していないか監視することが可能となる。
また、第1の処理装置13と第2の処理装置23との間を結ぶネットワーク経路X、Yを構成する装置及び信号線に故障が発生していないか監視でき、仮にネットワーク経路X又はネットワーク経路Yの一方が故障してデータの送受信には使用できなくても、処理を続行することが可能であり、エンジン制御の信頼性を高めている。
また、図示はしないが、送信するデータにパリティビットを付与し、受信側でパリティチェックを行えばより、エラー訂正をより正確に行うこともできる。
【0099】
(入力値選定処理)
次に、図3、図10に図示の入力値選定処理(ステップS14)につき説明する。
上述の、所定の時間内に、二つのネットワーク経路X、Yの双方からデータを受信した場合(入力値送受信ケース1)、及び所定の時間内に、二つのネットワーク経路X、Yの内、1経路からのみデータを受信した場合(入力値送受信ケース2)には、上述のごとく、第1の処理装置13内のメモリ、及び第2の処理装置23内のメモリには、各々、第1用入力値11、第2用入力値12、第1用入力値21、第2用入力値22が保存されている。
【0100】
そして、これらの保存された各データに基づき、第1の処理装置13、第2の処理装置23は、入力値選定処理を開始する(ステップS14)。
判定は、双方の第1の処理装置13、第2の処理装置23において個別に行われる。
【0101】
入力値選定処理法は、例えば、第1の処理装置13においては、次のようにして行われる。
第1の処理装置13内のメモリに記憶された第1用入力値11と第2の処理装置23から送信された第1用入力値21とが両方共にあるか(ステップS14a)、また、一致するか否かを判定する(ステップS14b)。
更に、第2用入力値12と第2の処理装置23から送信された第2用入力値22とが一致するかも判定する(ステップS14b)。
そして、一致すれば、第1用入力値11又は第1用入力値21を、第1用選定入力値11として、第2用入力値12又は第2用入力値22を、第2用選定入力値12として、第1の処理装置13内のメモリに保存する(ステップS14c)。
【0102】
ここで、同じエンジンに対する入力値が1つしかない場合は、ある方の各データを採用し、第1用選定入力値11及び第2用選定入力値12を、第1の処理装置13内のメモリに保存する(ステップS14e)。
【0103】
入力値が一致しなければ(ステップS14b)、第3のデータと比較して値が近い方を第1用選定入力値11及び第2用選定入力値12として保存する(ステップS14f)。
第3のデータの例としては、他エンジンの入力値や、理論的なモデル式、後述する外部指令表示装置1からの制御量に対する応答性等から導かれる推定値を使用する。
このようにして、第1の処理装置13は、第1用入力値11及び又は第1用入力値21から第1のエンジン11に対する第1用選定入力値11と、第2用入力値12及び又は第2用入力値22から第2のエンジン21に対する第2用選定入力値12を選定する。
【0104】
第2の処理装置23においても、上述の第1の処理装置13と同様の処理を行う。
即ち、第2の処理装置23内のメモリの第1の処理装置13から送信された第1用入力値11と第1用入力値21とが一致するか否かを判定する。
更に、第1の処理装置13から送信された第2用入力値12と第2用入力値22とが一致するかを判定する。
そして、第1の処理装置13と同様の処理を行い、第1用入力値11及び又は第1用入力値21から第1のエンジン11に対する第1用選定入力値21と、第2用入力値12及び又は第2用入力値22から第2のエンジン21に対する第2用選定入力値22を選定する。
【0105】
[制御量演算処理]
ステップS14が済むと、図4に図示のように、第1の処理装置13、第2の処理装置23は、各選定第1用入力値11、12、21、22からそれぞれのエンジンに対する制御量を求める、制御量演算処理を開始する(ステップS20)。
【0106】
先ず、第1の処理装置13、第2の処理装置23は、外部指令表示装置1から、二つのネットワーク経路X、Yを通して第1のエンジン11及び第2のエンジン21に対する指令値を入手する。
そして、どちらかの選定指令値を選定する(ステップS21)。
【0107】
ステップS22によって、第1の処理装置13は、第1のエンジン11に対する選定指令値と第1用選定入力値11とから、第1のエンジン11に対する第1用制御量11を、第2のエンジン21に対する選定指令値と第2用選定入力値12とから、エンジン2に対する第2用制御量12を得る。
同様に、第2の処理装置23は、第1のエンジン11に対する選定指令値と第1用選定入力値21から、第1のエンジン11に対する第1用制御量21を、第2のエンジン21に対する選定指令値と第2用選定入力値22から、第2のエンジン21に対する第2用制御量22を得る。
【0108】
[制御量共有処理]
ステップS22で得た制御量を共有するため、図5に図示のように、第1の処理装置13、第2の処理装置23は、制御量共有処理を開始する(ステップS30)。
このとき、上述の図1に基づき述べたように、第1の処理装置13、第2の処理装置23間のデータの送受信は、ネットワーク経路X、Yにて行われる。
【0109】
第1の処理装置13は、第1用制御量11及び第2用制御量12を、第1用制御量11X及び第2用制御量12Xとして、ネットワーク経路Xを使用して第2の処理装置23に送信する(ステップS31)。
2つ目の経路としてネットワーク経路Yを使用し、第1用制御量11及び第2用制御量12を、第1用制御量11Y及び第2用制御量12Yとして、第2の処理装置23に送信する(ステップS32)。
【0110】
同様に、第2の処理装置23も、第1用制御量21及び第2用制御量22を、第1用制御量21X及び第2用制御量22Xとして、ネットワーク経路Xを使用して第1の処理装置13に送信する(ステップS31)。
2つ目の経路としてネットワーク経路Yを使用し、第1用制御量21及び第2用制御量22を、第1用制御量21Y及び第2用制御量22Y、第1の処理装置13に送信する(ステップS32)。
【0111】
そして、第1の処理装置13は、制御量共有化処理を開始(ステップS30)すると、第2の処理装置23から送信されるデータを待つ(ステップS33)。
同様に、第2の処理装置23も、センサ計測値共有化処理を開始(ステップS30)すると、データ受信処理を開始し、第1の処理装置13から送信されるデータを待つ(ステップS33)。
【0112】
(制御量受信処理)
そして、図5、図11に図示のように、第1の処理装置13及び第2の処理装置23では、各々、二つのネットワーク経路X、Yからデータが受信されたか否か等の計測値受信処理を開始する(ステップS33)。
【0113】
この制御量送受信処理は、次の4通りのケースがある。
制御量送受信ケース1:所定の時間内に、二つのネットワーク経路X、Yの双方から各データを受信し、且つ、各データが一致した場合。
制御量送受信ケース2:所定の時間内に、二つのネットワーク経路X、Yの内、1経路からのみ各データを受信した場合。
制御量送受信ケース3:所定の時間内に、二つのネットワーク経路X、Yの双方から各データを受信したが、受信したデータが異なる場合。
制御量送受信ケース4:所定の時間を経過しても、二つのネットワーク経路X、Yの双方共に各データの受信が無い場合。
所定の時間とは、一方の第1の処理装置13(又は第2の処理装置23)が、他の第2の処理装置23(又は第1の処理装置13)にデータを送信してから受信するまでの正常時における最長ケースの時間以上の時間を適宜設定すればよい。
【0114】
先ず、第1の処理装置13では、制御量受信処理(ステップS33)において、ネットワーク経路X、Yから第1用制御量21X、第1用制御量21Y、第2用制御量22X、第2用制御量22Yを受信しバッファメモリ等に一次的に保存する作業を行う。
そして、バッファメモリ内の各データにつき、各データの受信があったか(ステップS33a、S33b)、各データが一致するか否かの確認(ステップS33c)、判定等を行う。
【0115】
制御量送受信ケース1の場合、第1の処理装置13では、所定の時間内に二つのネットワーク経路X、Yの双方からデータを受信したとき、各装置やネットワークに故障がなければ、バッファメモリ内の各データは、第1用制御量21X=第1用制御量21Y、第2用制御量22X=第2用制御量22Yとなるはずである(ステップS33a、S33b、S33c)。
バッファメモリに記憶された各データが一致した場合、バッファメモリ内の第1用制御量21X又は第1用制御量21Yを、第1用制御量21としてメモリに保存し(ステップS33d)、且つ第2用制御量22X又は第2用制御量22Yを、第2用制御量22としてメモリに保存し、バッファメモリ内の各データについては有効フラグをリセットする等の処理を行う。
【0116】
このようにして、第1の処理装置13のメモリ内には、ステップ22により入手した第1用制御量11及び第2用制御量12、ネットワーク経路X、Yにより受信したデータに基づく第1用制御量21及び第2用制御量22が保存され、制御量受信処理を終了する。
【0117】
同様に、第2の処理装置23も、制御量受信処理(ステップS33)において、ネットワーク経路X、Yから第1用制御量11X、第1用制御量11Y、第2用制御量12X、第2用制御量12Yを受信しバッファメモリ等に一次的に保存する作業を行う。
そして、第2の処理装置23は、バッファメモリ内の各データにつき、各データの受信があったか、各データが一致するか否かの確認、判定等を行う。
バッファメモリに記憶された各データが一致した場合、バッファメモリ内の第1用制御量11X又は第1用制御量11Yを、第1用制御量11としてメモリに保存し、且つ第2用制御量12X又は第2用制御量12Yを、第2用制御量12としてメモリに保存し、バッファメモリ内の各データについては有効フラグをリセットする等の処理を行う。
【0118】
このようにして、第2の処理装置23のメモリ内には、ステップS22により入手した第1用制御量21及び第2用制御量22、ネットワーク経路X、Yにより受信したデータに基づく第1用制御量11及び第2用制御量12が保存され、計測値受信処理(ステップS33)を終了する。
【0119】
制御量送受信ケース1の場合、第1の処理装置13及び第2の処理装置23の各メモリには、各々、第1用制御量11、第2用制御量12、第1用制御量21、第2用制御量22が保存されることになる。
【0120】
制御量送受信ケース2の、所定の時間内にネットワーク経路X、又はネットワーク経路Yのどちらか一方からしか各データを受信できなかった場合(ステップS33b)、受信し保存されたバッファメモリ内の各データを第1の処理装置13又は第2の処理装置23のメモリに保存し(ステップS33g)、計測値受信処理(ステップS33)は終了する。
これは、ネットワーク経路X、又はネットワーク経路Yのうち、どちらかの一方の経路で故障が発生したと考えられる。
ネットワーク経路に故障が発生しても、エンジン制御を停止させないために、受信した各データを優先して使用するものである。
制御量送受信ケース2の場合も、第1の処理装置13及び第2の処理装置23の各メモリには、各々、第1用制御量11、第2用制御量12、第1用制御量21、第2用制御量22が保存される。
【0121】
制御量送受信ケース3の、所定の時間内に、二つのネットワーク経路X、Yの双方から各データを受信したが、受信した各データが異なる場合(例えば、第1用制御量11X≠第1用制御量11Y、第1用制御量21X≠第1用制御量21Y、等)(ステップS33c)、受信し一次的に保存されたバッファメモリ内の各データは使用せず、第1の処理装置13又は第2の処理装置23ではメモリに記憶されている前回値を使用し(ステップS33h)、バッファメモリ内の各データを保存する。
前回値とは、これ以前の時点で、第1の処理装置13及び第2の処理装置23のメモリに保存された、処理済みの各データのことである。
【0122】
例えば、第1用制御量21X≠第1用制御量21Y、第2用制御量22X≠第2用制御量22Yの場合、第1の処理装置13のメモリには、第1用制御量11、第2用制御量12、前回の第1用制御量21、前回の第2用制御量22が保存されることになる。
一方、第2の処理装置23のメモリには、受信した各計測値は一致しているので、第1用制御量11、第2用制御量12、第1用制御量21、第2用制御量22が保存されることになる。
【0123】
制御量送受信ケース4の、所定の時間を経過しても、第1の処理装置13(又は第2の処理装置23)において、二つのネットワーク経路X、Yの双方共に第2の処理装置23(又は第1の処理装置13)からの各データの送信が無い場合、第1の処理装置13(又は第2の処理装置23)に故障が発生しているものと判定し、後述する故障処理を行う。
【0124】
なお、制御量送受信ケース4の場合、第2の処理装置23が故障したときは、第1の処理装置13のメモリには、第1用制御量11、第2用制御量12、0(第1用制御量21無し)、0(第2用制御量22無し)が保存される。
【0125】
しかしながら、第1の処理装置13又は第2の処理装置23そのものが故障した場合、故障箇所の連絡を処理する手段がなく、連絡ができない。
従って、所定時間経過後も各データの受信が全くないのは、送信されるはずのデータが用意できない(処理装置の故障)と判定する。
【0126】
このようにして、所定の時間を経過しても全くデータ受信が無いことを確認することにより、送信側の処理装置に故障が発生していないか監視することが可能となる。
また、第1の処理装置13と第2の処理装置23との間を結ぶネットワーク経路X、Yを構成する装置及び信号線に故障が発生していないか監視でき、仮にネットワーク経路X又はネットワーク経路Yの一方が故障してデータの送受信には使用できなくても、処理を続行することが可能であり、エンジン制御の信頼性を高めている。
また、図示はしないが、送信するデータにパリティビットを付与し、受信側でパリティチェックを行えばより、エラー訂正をより正確に行うこともできる。
【0127】
(制御量選定処理)
次に、図5、図12に図示の制御量選定処理(ステップS34)につき説明する。
上述の、所定の時間内に、二つのネットワーク経路X、Yの双方からデータを受信した場合(制御量送受信ケース1)、及び所定の時間内に、二つのネットワーク経路X、Yの内、1経路からのみデータを受信した場合(制御量送受信ケース2)には、上述のごとく、第1の処理装置13内のメモリ、及び第2の処理装置23内のメモリには、各々、第1用制御量11、第2用制御量12、第1用制御量21、第2用制御量22が保存されている。
【0128】
そして、これらの保存された各データに基づき、第1の処理装置13、第2の処理装置23は、制御量選定処理を開始する(ステップS34)。
選定は、双方の第1の処理装置13、第2の処理装置23において個別に行われる。
【0129】
制御量の選定は、例えば、第1の処理装置13においては、次のようにして行われる。
第1の処理装置13内のメモリに記憶された第1用制御量11と、第2の処理装置23から送信された第1用制御量21とが両方共にあるか(ステップS34a)、また、一致するか否かを判定する(ステップS34b)。
更に、メモリに記憶された第2用制御量12と、第2の処理装置23から送信された第2用制御量22とが一致するかも判定する(ステップS34b)。
そして、一致すれば、第1の処理装置13及び第1の処理装置13に故障はなく、第1用制御量11又は第1用制御量21を、第1用選定制御量11として、第2用制御量12又は第2用制御量22を第2用選定制御量12として、第1の処理装置13内のメモリに保存する(ステップS34c)。
【0130】
ここで、同じエンジンに対する制御量が1つしかない場合は、ある方の各制御量を採用し、第1用選定制御量11及び第2用選定制御量12を、第1の処理装置13内のメモリに保存する(ステップS34e)。
【0131】
同じエンジンに対する制御量が一致しなければ(ステップS34b)、前回の選定制御量を維持する(ステップS34f)。さらに、複数回にわたり連続して一致しなければ(ステップS34g)、そのエンジンに対する制御装置の故障であることを確定する(ステップS34k)。
【0132】
このようにして、第1の処理装置13は、第1用制御量11及び又は第1用制御量21から、第1のエンジン11に対する第1用選定制御量11を選出し、第2用制御量12及び又は第2用制御量22から、第2のエンジン21に対する第2用選定制御量12を選定する。
【0133】
第2の処理装置23においても、上述の第1の処理装置13と同様の処理を行う。
即ち、第2の処理装置23内のメモリに記憶された第1用制御量21と、第1の処理装置13から送信された第1用制御量11とが一致するか否かを判定する。
更に、メモリに記憶された第2用制御量22と、第1の処理装置13から送信された第2用制御量12とが一致するかを判定する。
そして、第1の処理装置13と同様の処理を行い、第1用制御量11及び又は第1用制御量21から、第1のエンジン11に対する第1用選定制御量21と、第2用制御量12及び又は第2用制御量22から第2のエンジン21に対する第2用選定制御量22を選定する。
【0134】
[アクチュエータ制御処理]
ステップS30が済むと、図6に図示のように、上述の選定制御量を基に、第1の処理装置13、第2の処理装置23が対応するアクチュエータに制御指令を出す、アクチュエータ制御を開始する(ステップS40)。
ステップS40で行う、アクチュエータ制御処理は例えば次のようにする。
まず、第1の処理装置13、第2の処理装置23が、制御するアクチュエータを決定する。
【0135】
第1のA系入出力装置14a、第1のA系センサ15a、第1のA系アクチュエータ16a、入出力信号線L1等に故障が起きていない場合、第1の処理装置13は、選定制御量11に基づき、図6に実線で図示のように、第1のA系アクチュエータ16aに制御指令を出す(ステップS41)。
また、A系が故障している場合には、第1の処理装置13は、選定制御量11に基づき、図6に点線で図示のように、第1のA系通信装置12a、第1のB系通信装置12b、第1のB系入出力装置14bを通して、第1のB系アクチュエータ16bに制御指令を出す(ステップS42)。
【0136】
同様に、第2のA系入出力装置24a、第2のA系センサ25a、第2のA系アクチュエータ26a、入出力信号線L3等に故障が起きていない場合、第2の処理装置23は、図6に実線で図示のように、選定制御量22に基づき、第2のA系アクチュエータ26aに制御指令を出す(ステップS41)。
また、A系が故障している場合には、第2の処理装置23は、選定制御量22に基づき、図6に点線で図示のように、第2のA系通信装置22a、第2のB系通信装置22b、第2のB系入出力装置24bを通して、第2のB系アクチュエータ26bに制御指令を出す(ステップS42)。
【0137】
更に、例えば、第2の処理装置23及び又は第2のA系通信装置22a等が故障している場合には、第1の処理装置13は、選定制御量12に基づき、第1のA系通信装置12a、第1の外部ネットワーク信号線NL1、第2のB系通信装置22b、第2のB系入出力装置24bを通して、第2のB系アクチュエータ26bに制御指令を出す(ステップS43)。
【0138】
[第2の実施の形態の全体構成]
次に、図13に基づき、本発明の第2の実施の形態に係るエンジン制御装置の全体構成を説明する。
図13に図示のものは、第1のA系通信装置12aの第1のA系外部用インタフェース17aと、第2のA系通信装置22aの第2のA系外部用インタフェース27aとを、第1の外部ネットワーク信号線NL1で接続し、第1のB系通信装置12bの第1のB系外部用インタフェース17bと、第2のB系通信装置22bの第2のB系外部用インタフェース27bとを第2の外部ネットワーク信号線NL2で接続したものである。
その他の外部指令表示装置1、第1の制御装置10、第1のエンジン11、第2の制御装置20、第2のエンジン21等は、第1の実施の形態のものと同一である。
【0139】
この接続によっても、外部指令表示装置1、第1の制御装置10、第2の制御装置20を結ぶ経路が2経路存在する。
従って、本発明の第2の実施の形態に係るエンジン制御装置も、第1の実施の形態のものと同様に機能し、同一の作用効果を奏する。
【0140】
[その他の形態]
以上、本発明の第1、2の実施の形態につき説明したが、本発明は上記の実施の形態に限定されず、本発明の範囲内でその具体的構造に種々の変更を加えてよいことはいうまでもない。
例えば、データの送受信は、送信先、発信元、各計測値、各入力値、各制御量、故障情報等を一度に行うようにしても良い。
このようにすれば、ネットワークの故障の有無、処理装置の故障の有無等の判断は一回とすることができる。
【図面の簡単な説明】
【0141】
【図1】本発明の第1の実施の形態に係るエンジン制御装置の全体構成図である。
【図2】本発明の第1の実施の形態に係るエンジン制御におけるセンサ計測値入手、共有化処理のフロー図である。
【図3】本発明の第1の実施の形態に係るエンジン制御における入力値共有処理のフロー図である。
【図4】本発明の第1の実施の形態に係るエンジン制御における制御量演算処理のフロー図である。
【図5】本発明の第1の実施の形態に係るエンジン制御における制御量共有処理のフロー図である。
【図6】本発明の第1の実施の形態に係るエンジン制御におけるアクチュエータ制御のフロー図である。
【図7】図2における受信処理、選定処理のフロー図である。
【図8】図2における選定処理のフロー図である。
【図9】図3における受信処理のフロー図である。
【図10】図3における選定処理のフロー図である。
【図11】図5における受信処理のフロー図である。
【図12】図5における選定処理のフロー図である。
【図13】本発明の第2の実施の形態に係るエンジン制御装置の全体構成図である。
【符号の説明】
【0142】
1 外部指令表示装置
10 第1の制御装置
11 第1のエンジン
12a 第1のA系通信装置
12b 第1のB系通信装置
13 第1の処理装置
14a 第1のA系入出力装置
14b 第1のB系入出力装置
15a 第1のA系センサ
15b 第1のB系センサ
16a 第1のA系アクチュエータ
16b 第1のB系アクチュエータ
17a 第1のA系外部用インタフェース
17b 第1のB系外部用インタフェース
18a 第1のA系内部用インタフェース
18b 第1のB系内部用インタフェース
20 第2の制御装置
21 第2のエンジン
22a 第2のA系通信装置
22b 第2のB系通信装置
23 第2の処理装置
24a 第2のA系入出力装置
24b 第2のB系入出力装置
25a 第2のA系センサ
25b 第2のB系センサ
26a 第2のA系アクチュエータ
26b 第2のB系アクチュエータ
27a 第2のA系外部用インタフェース
27b 第2のB系外部用インタフェース
28a 第2のA系内部用インタフェース
28b 第2のB系内部用インタフェース
ASL1 第1の制御A系統
ASL2 第2の制御A系統
BSL1 第1の制御B系統
BSL2 第2の制御B系統
NL1 第1の外部ネットワーク信号線
NL2 第2の外部ネットワーク信号線
NL3 第1の内部ネットワーク信号線
NL4 第2の内部ネットワーク信号線
L1〜L4 入出力信号線
【特許請求の範囲】
【請求項1】
第1のエンジン及び第2のエンジンと、
前記第1のエンジンに設けられた第1のA系センサ、第1のB系センサ、第1のA系アクチュエータ及び第1のB系アクチュエータと、
前記第1のA系センサ及び前記第1のA系アクチュエータに接続された第1のA系入出力装置と、
前記第1のA系入出力装置を介して前記第1のA系センサから計測値を入力すると共に前記第1のA系アクチュエータの制御量を演算し制御する第1の処理装置と、
前記第1の処理装置に接続された第1のA系通信装置と、
前記第1のB系センサ及び前記第1のB系アクチュエータに接続された第1のB系入出力装置と、
前記第1のB系入出力装置に接続された第1のB系通信装置と、
前記第1のA系通信装置と前記第1のB系通信装置とを接続する第1の内部ネットワーク信号線と、
前記第2のエンジンに設けられた第2のA系センサ、第2のB系センサ、第2のA系アクチュエータ及び第2のB系アクチュエータと、
前記第2のA系センサ及び前記第2のA系アクチュエータに接続された第2のA系入出力装置と、
前記第2のA系入出力装置を介して前記第2のA系センサから計測値を入力すると共に前記第2のA系アクチュエータの制御量を演算し制御する第2の処理装置と、
前記第2の処理装置に接続された第2のA系通信装置と、
前記第2のB系センサ及び前記第2のB系アクチュエータに接続された第2のB系入出力装置と、
前記第2のB系入出力装置に接続された第2のB系通信装置と、
前記第2のA系通信装置と前記第2のB系通信装置とを接続する第2の内部ネットワーク信号線と、
前記第1のA系通信装置と第2のB系通信装置又は前記第2のA系通信装置とを接続する第1の外部ネットワーク信号線と、
前記第1のB系通信装置と第2のA系通信装置又は前記第2のB系通信装置とを接続する第2の外部ネットワーク信号線と、
前記第1の外部ネットワーク信号線及び前記第2の外部ネットワーク信号線に接続された外部指令表示装置とを備えたことを特徴とするエンジン制御装置。
【請求項2】
前記第1の処理装置は、前記第1のB系入出力装置、前記第1のB系通信装置及び前記第1のA系通信装置を介して前記第1のB系センサから計測値を入力すると共に前記第1のB系アクチュエータの制御量を演算し制御し、
前記第2の処理装置は、前記第2のB系入出力装置、前記第2のB系通信装置及び前記第2のA系通信装置を介して前記第2のB系センサから計測値を入力すると共に前記第2のB系アクチュエータの制御量を演算し制御するものであることを特徴とする請求項1に記載のエンジン制御装置。
【請求項3】
前記第1のA系センサ及び前記第1のB系センサからの計測値は、前記第1の外部ネットワーク信号線及び前記第2の外部ネットワーク信号線を介して前記第2の処理装置にも送信され、
前記第2のA系センサ及び前記第2のB系センサからの計測値は、前記第1の外部ネットワーク信号線及び前記第2の外部ネットワーク信号線を介して前記第1の処理装置にも送信されると共に、
前記第1の処理装置及び前記第2の処理装置は、前記第1のA系アクチュエータ、前記第1のB系アクチュエータ、第2のA系アクチュエータ及び前記第2のB系アクチュエータの制御量を演算するものであることを特徴とする請求項1又は2に記載のエンジン制御装置。
【請求項4】
前記第1の処理装置及び前記第2の処理装置は、前記第1の外部ネットワーク信号線を介して送信された計測値と前記第2の外部ネットワーク信号線を介して送信された計測値とを比較し、前記第1の外部ネットワーク信号線又は前記第2の外部ネットワーク信号線の故障の有無を判断するものであることを特徴とする請求項3に記載のエンジン制御装置。
【請求項5】
前記第1の処理装置及び前記第2の処理装置は、計測値が前記第1の外部ネットワーク信号線及び前記第2の外部ネットワーク信号線を介して送信しないときに送信元の前記第1の処理装置又は前記第2の処理装置が故障していると判断するものであることを特徴とする請求項3又は4に記載のエンジン制御装置。
【請求項6】
前記第1の処理装置は、前記第2のB系入出力装置、前記第2のB系通信装置及び前記第1のA系通信装置を介して前記第2のB系センサから計測値を入力すると共に前記第2のB系アクチュエータの制御量を演算し制御し、
前記第2の処理装置は、前記第1のB系入出力装置、前記第1のB系通信装置及び前記第2のA系通信装置を介して前記第1のB系センサから計測値を入力すると共に前記第1のB系アクチュエータの制御量を演算し制御するものであることを特徴とする請求項5に記載のエンジン制御装置。
【請求項1】
第1のエンジン及び第2のエンジンと、
前記第1のエンジンに設けられた第1のA系センサ、第1のB系センサ、第1のA系アクチュエータ及び第1のB系アクチュエータと、
前記第1のA系センサ及び前記第1のA系アクチュエータに接続された第1のA系入出力装置と、
前記第1のA系入出力装置を介して前記第1のA系センサから計測値を入力すると共に前記第1のA系アクチュエータの制御量を演算し制御する第1の処理装置と、
前記第1の処理装置に接続された第1のA系通信装置と、
前記第1のB系センサ及び前記第1のB系アクチュエータに接続された第1のB系入出力装置と、
前記第1のB系入出力装置に接続された第1のB系通信装置と、
前記第1のA系通信装置と前記第1のB系通信装置とを接続する第1の内部ネットワーク信号線と、
前記第2のエンジンに設けられた第2のA系センサ、第2のB系センサ、第2のA系アクチュエータ及び第2のB系アクチュエータと、
前記第2のA系センサ及び前記第2のA系アクチュエータに接続された第2のA系入出力装置と、
前記第2のA系入出力装置を介して前記第2のA系センサから計測値を入力すると共に前記第2のA系アクチュエータの制御量を演算し制御する第2の処理装置と、
前記第2の処理装置に接続された第2のA系通信装置と、
前記第2のB系センサ及び前記第2のB系アクチュエータに接続された第2のB系入出力装置と、
前記第2のB系入出力装置に接続された第2のB系通信装置と、
前記第2のA系通信装置と前記第2のB系通信装置とを接続する第2の内部ネットワーク信号線と、
前記第1のA系通信装置と第2のB系通信装置又は前記第2のA系通信装置とを接続する第1の外部ネットワーク信号線と、
前記第1のB系通信装置と第2のA系通信装置又は前記第2のB系通信装置とを接続する第2の外部ネットワーク信号線と、
前記第1の外部ネットワーク信号線及び前記第2の外部ネットワーク信号線に接続された外部指令表示装置とを備えたことを特徴とするエンジン制御装置。
【請求項2】
前記第1の処理装置は、前記第1のB系入出力装置、前記第1のB系通信装置及び前記第1のA系通信装置を介して前記第1のB系センサから計測値を入力すると共に前記第1のB系アクチュエータの制御量を演算し制御し、
前記第2の処理装置は、前記第2のB系入出力装置、前記第2のB系通信装置及び前記第2のA系通信装置を介して前記第2のB系センサから計測値を入力すると共に前記第2のB系アクチュエータの制御量を演算し制御するものであることを特徴とする請求項1に記載のエンジン制御装置。
【請求項3】
前記第1のA系センサ及び前記第1のB系センサからの計測値は、前記第1の外部ネットワーク信号線及び前記第2の外部ネットワーク信号線を介して前記第2の処理装置にも送信され、
前記第2のA系センサ及び前記第2のB系センサからの計測値は、前記第1の外部ネットワーク信号線及び前記第2の外部ネットワーク信号線を介して前記第1の処理装置にも送信されると共に、
前記第1の処理装置及び前記第2の処理装置は、前記第1のA系アクチュエータ、前記第1のB系アクチュエータ、第2のA系アクチュエータ及び前記第2のB系アクチュエータの制御量を演算するものであることを特徴とする請求項1又は2に記載のエンジン制御装置。
【請求項4】
前記第1の処理装置及び前記第2の処理装置は、前記第1の外部ネットワーク信号線を介して送信された計測値と前記第2の外部ネットワーク信号線を介して送信された計測値とを比較し、前記第1の外部ネットワーク信号線又は前記第2の外部ネットワーク信号線の故障の有無を判断するものであることを特徴とする請求項3に記載のエンジン制御装置。
【請求項5】
前記第1の処理装置及び前記第2の処理装置は、計測値が前記第1の外部ネットワーク信号線及び前記第2の外部ネットワーク信号線を介して送信しないときに送信元の前記第1の処理装置又は前記第2の処理装置が故障していると判断するものであることを特徴とする請求項3又は4に記載のエンジン制御装置。
【請求項6】
前記第1の処理装置は、前記第2のB系入出力装置、前記第2のB系通信装置及び前記第1のA系通信装置を介して前記第2のB系センサから計測値を入力すると共に前記第2のB系アクチュエータの制御量を演算し制御し、
前記第2の処理装置は、前記第1のB系入出力装置、前記第1のB系通信装置及び前記第2のA系通信装置を介して前記第1のB系センサから計測値を入力すると共に前記第1のB系アクチュエータの制御量を演算し制御するものであることを特徴とする請求項5に記載のエンジン制御装置。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2007−46560(P2007−46560A)
【公開日】平成19年2月22日(2007.2.22)
【国際特許分類】
【出願番号】特願2005−232840(P2005−232840)
【出願日】平成17年8月11日(2005.8.11)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成19年2月22日(2007.2.22)
【国際特許分類】
【出願日】平成17年8月11日(2005.8.11)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]