
エンジン制御装置
【課題】ドライバの走行要求に見合うエンジンの出力制御を実施する。
【解決手段】ECU30は、アクセルペダル31が踏み込まれているアクセル踏込状態であって、かつブレーキペダル34が踏み込まれているブレーキ踏込状態である両踏み状態であることが検出された場合に、エンジン10の出力を制限する出力制限処理を実施する。また特に、ECU30は、クラッチ手段(クラッチ装置14、クラッチペダル17)が、エンジン10と変速機15との間の動力伝達を遮断する動力遮断状態になっていることが検出された場合に、出力制限処理の実施を禁止する。
【解決手段】ECU30は、アクセルペダル31が踏み込まれているアクセル踏込状態であって、かつブレーキペダル34が踏み込まれているブレーキ踏込状態である両踏み状態であることが検出された場合に、エンジン10の出力を制限する出力制限処理を実施する。また特に、ECU30は、クラッチ手段(クラッチ装置14、クラッチペダル17)が、エンジン10と変速機15との間の動力伝達を遮断する動力遮断状態になっていることが検出された場合に、出力制限処理の実施を禁止する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用のエンジン制御装置に関し、詳しくは、アクセルペダルとブレーキペダルとの両方が踏み込み状態になった場合のエンジン制御に関する。
【背景技術】
【0002】
ドライバがアクセルペダルとブレーキペダルとを誤って両踏みした場合や、ドライバの操作とは無関係にアクセルペダルが踏み込み状態になった場合、ドライバの要求どおりに車両の走行を実施できないことが考えられる。その反面、アクセルペダルとブレーキペダルとが両踏みされたからといって、それが必ずしもドライバの意思に反するものではないことも考えられる。このような観点から、従来、アクセルペダルとブレーキペダルとの両方が踏み込まれた場合の措置について種々提案されている(例えば、特許文献1参照)。
【0003】
具体的には、特許文献1のシステムでは、コーナリング等における特殊な運転技術ではドライバが意図的にアクセルペダル及びブレーキペダルを同時に踏み込むことを考慮し、ドライバが意図的にブレーキペダルとアクセルペダルとを同時に踏み込み操作した場合のブレーキペダル踏込量の上限値を予め定めて記憶しておく。そして、ブレーキペダルとアクセルペダルとの同時踏み込みが生じた場合、ブレーキペダル踏込量の検出値が上限値未満のときには、ドライバが意図的にアクセルペダル及びブレーキペダルを同時に踏み込んだものとして、エンジン出力を目標値で制御する。一方、ブレーキペダル踏込量の検出値が上限値以上のときには、ドライバが誤ってアクセルペダルとブレーキペダルとを両踏みしたものとして、エンジンを強制的にアイドル状態にする。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−291030号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、アクセルペダル及びブレーキペダルを両踏みする際のブレーキペダルの踏込量は、ドライバの個人差や都度の操作毎に相違すると考えられる。具体的には、例えばドライバが誤って両踏みした場合でも、ブレーキペダルが軽く踏まれた状態であることもあれば、逆に、ドライバが意図的に両踏みした場合でも、ブレーキペダルが大きく踏み込まれることがある。したがって、ブレーキペダル踏込量の検出値と所定値との単なる比較では、ドライバが意図的にアクセルペダル及びブレーキペダルを同時に踏み込んだのか、それともドライバの意思に反して両踏み状態になっているのかを正確に特定できないおそれがある。かかる場合、ドライバが意図的にアクセルペダルとブレーキペダルとを両踏みしたときにも、エンジンの出力制限が行われてしまい、ドライバの走行要求を満たすことができないことが考えられる。
【0006】
本発明は、上記課題に鑑みなされたものであり、ドライバの走行要求に見合うエンジンの出力制御を実施することができるエンジン制御装置を提供することを主たる目的とする。
【課題を解決するための手段】
【0007】
本発明は、上記課題を解決するために、以下の手段を採用した。
【0008】
本発明は、エンジンと変速機との間の動力の伝達及び遮断を行うクラッチ手段を備える車両に適用されるエンジン制御装置に関する。また、請求項1に記載の発明では、アクセルペダルが踏み込まれているアクセル踏込状態であって、かつブレーキペダルが踏み込まれているブレーキ踏込状態である両踏み状態であることを検出する両踏み検出手段と、前記両踏み検出手段により両踏み状態であることが検出された場合にエンジンの出力を制限する出力制限処理を実施する出力制限手段と、前記クラッチ手段が動力遮断状態になっていることを検出するクラッチ検出手段と、前記クラッチ検出手段により前記クラッチ手段が動力遮断状態になっていることが検出された場合に前記出力制限処理の実施を禁止する出力制限禁止手段と、を備えることを特徴とする。
【0009】
コーナリング等で用いられる運転技術の一つとして、ヒールアンドトウの技法がある。ヒールアンドトウの操作では、ドライバの意思によってアクセルペダル及びブレーキペダルが両踏み操作されるが、その一連の操作においては、まず、ドライバにより、クラッチ手段が動力伝達状態から動力遮断状態に移行される。上記発明では、クラッチ手段が動力遮断状態に移行した場合には、その後においてドライバの意思に基づいてアクセルペダル及びクラッチペダルの両踏み状態が生じる場合があることに着目し、クラッチ手段が動力遮断状態になっている場合にエンジンの出力制限を禁止する。よって、ドライバによりヒールアンドトウが行われ、アクセルペダル及びクラッチペダルの両踏み状態が生じた場合に、エンジンの出力制限が行われるのを回避することができる。その結果、ドライバの意図したとおりにエンジン出力を制御することができる。
【0010】
請求項2に記載の発明では、前記ブレーキ踏込状態であることを検出するブレーキ検出手段と、前記クラッチ検出手段による検出結果に基づいて、前記クラッチ手段が動力伝達状態から動力遮断状態に移行したことを検出する移行検出手段と、を備え、前記出力制限禁止手段は、前記ブレーキ検出手段により前記ブレーキ踏込状態であることが検出されている期間内において前記移行検出手段により動力遮断状態に移行したことが検出された場合に、前記出力制限処理の実施を禁止する。
【0011】
ヒールアンドトウの操作では、通常、クラッチ手段が動力遮断状態に移行される前にブレーキ操作が行われ、そのブレーキ操作が継続された状態でクラッチ手段が動力遮断状態に移行される。これに鑑み、上記構成とすることにより、クラッチ手段の動力遮断状態への移行が、ヒールアンドトウを目的とした操作かそうでないかの判断を正確に行うことができる。
【0012】
また、ヒールアンドトウの操作では、クラッチ手段が動力遮断状態に移行する時点ではアクセルペダルは未だ踏み込まれておらず、クラッチ手段の動力遮断状態への移行後において、変速機側とエンジン側との歯車回転速度を合わせるべくアクセル操作が行われることで、アクセル及びブレーキの両踏み状態が生じる。
【0013】
これに鑑み、請求項3に記載の発明では、アクセルペダルが踏み込まれていないアクセル非踏込状態であることを検出するアクセル検出手段と、前記クラッチ検出手段による検出結果に基づいて、前記クラッチ手段が動力伝達状態から動力遮断状態に移行したことを検出する移行検出手段と、を備え、前記出力制限禁止手段は、前記アクセル検出手段によりアクセル非踏込状態であることが検出されている期間内において前記移行検出手段により動力遮断状態に移行したことが検出された場合に、前記出力制限処理の実施を禁止する。この構成によれば、クラッチ手段の動力遮断状態への移行がヒールアンドトウを目的としたものであるか否かをより正確に判断することができる。
【0014】
ここで、エンジンの出力制限を禁止する期間は、車両安全確保の観点からすると、ヒールアンドトウの操作に必要な最低限の長さにするのが望ましい。これに鑑み、請求項4に記載の発明では、前記クラッチ検出手段により動力遮断状態になっていることが検出された後に、アクセルペダルの踏み込みに伴うエンジン回転速度の回転上昇量を検出する回転量検出手段を備え、前記回転量検出手段により検出した回転上昇量に基づいて、前記出力制限禁止手段による前記出力制限処理の実施の禁止を解除する。この構成によれば、アクセル操作に伴い、エンジン回転速度が、変速機側とエンジン側との歯車回転速度を合わせるのに必要な量だけ上昇した時点でエンジン出力制限の禁止を解除することができる。したがって、ヒールアンドトウの操作時にエンジン出力制限が実施されるのを回避しつつ、そのエンジン出力制限の禁止期間をできるだけ短くすることができる。
【0015】
変速機として手動変速機を適用する場合、請求項5に記載の発明のように、前記クラッチ手段は、ドライバによるクラッチペダルの踏み込み操作に応じて前記動力の伝達及び遮断を行うものであり、前記クラッチ検出手段は、クラッチペダルが踏み込まれているクラッチ踏込み状態になっていることを検出することにより、前記クラッチ手段が動力遮断状態になっていることを検出する手段であり、前記出力制限手段は、前記クラッチ検出手段によりクラッチ踏込み状態になっていることが検出された場合に、前記出力制限処理の実施を禁止する構成にするとよい。
【0016】
請求項6に記載の発明では、前記クラッチ手段が動力遮断状態になっているときの前記変速機のシフト位置の変更方向を検出するシフト方向検出手段を備え、前記シフト方向検出手段により検出された変更方向がシフトアップ側である場合に、前記出力制限禁止手段による前記出力制限処理の実施の禁止を解除する。ヒールアンドトウの操作では、変速機のシフト位置がシフトダウン側に変更される。つまり、クラッチ手段が動力遮断状態に移行し、その後、変速機のシフト位置がシフトアップ側に変更された場合には、そのクラッチ操作はヒールアンドトウのための操作でないと判断することができる。したがって、上記構成とすることにより、アクセル及びブレーキの両踏み時のエンジン出力制限が不必要に禁止されるのを回避することができる。
【0017】
ところで、手動変速機を備える車両では、ヒールアンドトウの操作に際し、1回目のクラッチ操作でニュートラルギヤに変更し、2回目のクラッチ操作で所望のギヤにシフトするダブルクラッチの操作が行われることがある。この操作では、1回目のクラッチ操作と2回目のクラッチ操作との間の期間に、クラッチ手段の動力伝達状態においてアクセルペダル及びブレーキペダルの両踏み状態が生じることがある。したがって、クラッチ手段が動力伝達状態に戻った時点で、ヒールアンドトウの操作が完了したものとしてエンジンの出力制限禁止を解除すると、その後、ヒールアンドトウを行うべくアクセルペダルが踏み込まれた時に、エンジンの出力制限が実施されることが考えられる。
【0018】
その点に鑑み、請求項7に記載の発明では、前記クラッチ手段が動力伝達状態から動力遮断状態に移行してからの所定期間を、前記出力制限処理の実施を禁止する禁止確定期間として設定する期間設定手段と、前記設定手段により設定した禁止確定期間内において、アクセルペダルの踏み込み操作があったか否かを判定するアクセル操作判定手段と、を備え、前記アクセル操作判定手段により前記禁止確定期間内にアクセルペダルの踏み込み操作有りと判定された場合に、前記禁止確定期間の経過後において前記出力制限処理の禁止を継続し、踏み込み操作無しと判定された場合に、前記禁止確定期間が経過した後、前記出力制限処理の禁止を解除する。本構成によれば、クラッチ手段が動力遮断状態に移行した後のアクセル操作に応じて、エンジンの出力制限禁止を継続するか、それとも解除するかを判断するため、ダブルクラッチ操作が行われた場合にも、ドライバの意図したとおりにエンジン出力を制御することができる。
【0019】
また、本発明は、自動変速機を備える車両に適用してもよい。この場合、請求項8に記載の発明のように、前記クラッチ手段は、ドライバによる前記変速機のシフト位置の変更操作に応じて前記動力の伝達及び遮断を行うものであり、前記クラッチ検出手段は、前記シフト位置のシフトダウン側への変更操作があったことを検出することにより、前記クラッチ手段が動力遮断状態になっていることを検出する手段であり、前記出力制限手段は、前記クラッチ検出手段により前記シフト位置のシフトダウン側への変更操作があったことが検出された場合に前記出力制限処理の実施を禁止する構成にするとよい。
【図面の簡単な説明】
【0020】
【図1】エンジン制御システムの全体概略構成図。
【図2】エンジン出力制限の許否判定処理を示すフローチャート。
【図3】エンジン出力制限処理を示すフローチャート。
【図4】本システムのエンジン制御の具体的態様を示すタイムチャート。
【図5】他の実施形態のエンジン出力制限の許否判定処理を示すフローチャート。
【図6】他の実施形態のエンジン出力制限の許否判定処理を示すフローチャート。
【図7】他の実施形態のエンジン制御の具体的態様を示すタイムチャート。
【図8】他の実施形態のエンジン制御の具体的態様を示すタイムチャート。
【発明を実施するための形態】
【0021】
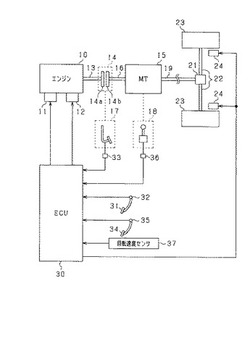
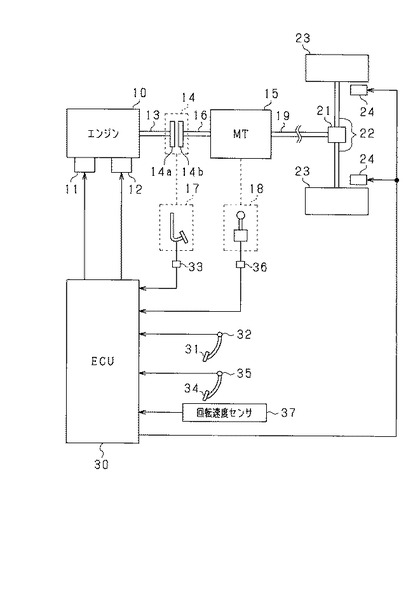
以下、本発明を具体化した実施形態を図面に基づいて説明する。本実施形態は、車載エンジンを対象にエンジン制御システムを構築するものとしており、エンジンと手動式変速機(マニュアルトランスミッション)とを搭載した車両に具体化している。当該制御システムにおいては、電子制御ユニット(以下、ECUという)を中枢として、エンジンの燃料噴射制御や点火制御等を実施する。このエンジン制御システムの全体概略構成図を図1に示す。
【0022】
図1に示すように、エンジン10は、例えば多気筒ガソリンエンジンであり、気筒ごとに燃料噴射手段としてのインジェクタ11と、点火手段としての点火装置12(イグナイタ等)とを備えている。また、エンジン10の出力軸(クランク軸)13には、クラッチ装置14を介して手動変速機15が接続されている。
【0023】
クラッチ装置14は、エンジン出力軸13に接続されたエンジン10側の円板14a(フライホイール等)と、トランスミッション入力軸16に接続された手動変速機15側の円板14b(クラッチディスク等)とを備えている。クラッチ装置14では、ドライバによるクラッチペダル17の踏込み操作又は踏込み解除操作により、両円板14a,14b同士が接触及び離間のいずれかの状態に切り替えられる。詳しくは、ドライバによりクラッチペダル17が踏み込まれると、両円板14a,14bが相互に離れてエンジン10から手動変速機15への動力が遮断され、その踏込み操作が解除されると、両円板14a,14bが相互に接触してエンジン10から手動変速機15に動力が伝達される。なお、クラッチ装置14及びクラッチペダル17により、ドライバによる操作に応じて動力の遮断及び伝達を行うクラッチ手段が構成されている。
【0024】
手動変速機15は、ドライバによるシフト装置18の手動操作により変速比が切り替えられるマニュアルトランスミッションであり、複数段の前進ギヤと、後退ギヤと、ニュートラルギヤとを備えている。手動変速機15では、都度のシフト位置に応じた変速比により、トランスミッション入力軸16の回転がトランスミッション出力軸19の回転に変換される。
【0025】
トランスミッション出力軸19には、ディファレンシャルギヤ21や車軸22等を介して車輪(駆動輪)23が接続されている。また、車輪23には、図示しない油圧回路等により駆動され、各車輪23に対して制動力を付与するブレーキアクチュエータ24が設けられている。
【0026】
ECU30は、周知のマイクロコンピュータ等を備えてなる電子制御装置(制御手段)であり、本システムに設けられている各種センサの検出結果等に基づいて、インジェクタ11による燃料噴射制御、点火装置12による点火制御などの各種エンジン制御や、ブレーキアクチュエータ24による制動制御等を実施する。センサ類について詳しくは、ECU30には、アクセル操作部材としてのアクセルペダル31の踏み込み操作量を検出するアクセルセンサ32、クラッチペダル17の踏み込み/踏み込み解除を検出するクラッチセンサ33、ブレーキペダル34の踏み込み/踏み込み解除を検出するブレーキセンサ35、シフト装置18のシフト位置を検出するシフト位置センサ36、エンジン回転速度を検出する回転速度センサ37等が接続されており、これら各センサの検出信号がECU30に逐次入力される。その他、本システムには、図示しない負荷センサ(エアフロメータ、吸気圧センサ)等が設けられている。
【0027】
ところで、車両走行中において、ドライバがブレーキペダル34を踏み損なってアクセルペダル31も同時に踏み込んでしまったり、あるいはフロアマットのずれ等に起因してドライバの意思とは無関係にアクセルペダル31が押し下げられたりすることがある。この場合、ドライバの意に反して、アクセルペダル31及びブレーキペダル34が共に踏み込み操作されている両踏み状態になり、ドライバがブレーキペダル34を踏み込んでいるにもかかわらず、ドライバの要求に見合う車両制動力が出力されないことが懸念される。
【0028】
これに鑑み、本システムでは、アクセルペダル31及びブレーキペダル34が両踏み状態であるか否かを判定し、両踏み状態であると判定された場合に、エンジン10の出力制限を実施することとしている。これにより、車両の安全確保を図るようにしている。この場合の出力制限処理としては、例えば燃料噴射を停止する処理、アイドル運転に移行する処理等を含む。
【0029】
その一方で、アクセルペダル31及びブレーキペダル34が共に踏み込まれたからといって、その両踏み状態が必ずしもドライバの意思に反するものではない場合もある。具体的には、ドライバがコーナリング時にヒールアンドトウの操作を行う場合、アクセルペダル31及びブレーキペダル34の両踏み状態が生じるが、この場合の両踏み状態は、ドライバの意思に基づくものである。よって、かかる場合にエンジン10の出力制限を行うと、ドライバの要求どおりに車両の走行を実施できないことが考えられる。
【0030】
そこで、本実施形態では、ヒールアンドトウによる運転時には、アクセル及びブレーキが両踏み状態になる前にシフト装置18のシフト操作が行われることに着目し、車両走行中において、クラッチ装置14が動力遮断状態になっていることを検出する。そして、クラッチ装置14が動力遮断状態になっていることが検出された場合に、アクセルペダル31及びブレーキペダル34が両踏み操作された際のエンジン出力制限の実施を禁止することとしている。
【0031】
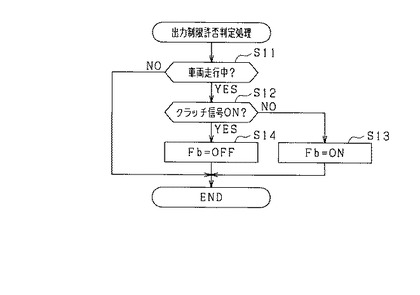
次に、本実施形態のエンジン制御の処理手順を、図2及び図3のフローチャートを用いて説明する。ここで、図2は、エンジン出力制限の許否判定処理を示し、図3は、エンジン出力制限処理を示す。これらの処理は、ECU30により所定周期毎に実行される。
【0032】
まず、図2の許否判定処理について説明する。図2において、ステップS11では車両走行中か否かを判定し、ステップS11がYESの場合、ステップS12へ進む。ステップS12では、クラッチセンサ33からのクラッチ信号(ON/OFF信号)に基づいて、クラッチペダル17が踏み込まれているクラッチ踏み込み状態であるか否かを判定する。
【0033】
クラッチペダル17が踏み込まれていない場合(クラッチセンサ33からON信号を入力している場合)には、ステップS12で否定判定され、ステップS13へ進み、出力制限許可フラグFbをオンにする。一方、クラッチ踏み込み状態の場合(クラッチセンサ33からOFF信号を入力している場合)には、ステップS14へ進み、出力制限許可フラグFbをオフにする。
【0034】
続いて、図3の出力制限処理について説明する。図3において、ステップS21では、ブレーキセンサ35からのブレーキ信号(ON/OFF信号)に基づいて、ブレーキペダル34が踏み込まれているブレーキ踏み込み状態であるか否かを判定する。なお、本実施形態では、ブレーキ踏み込み状態の場合に、ブレーキセンサ35からON信号が出力され、ブレーキ踏み込み解除状態の場合に、ブレーキセンサ35からOFF信号が出力される。
【0035】
ステップS22では、アクセルセンサ32からのアクセル信号に基づいて、アクセルペダル31が踏み込まれているアクセル踏み込み状態であるか否かを判定する。そして、ステップS21及びステップS22で肯定判定された場合、ステップS23へ進み、出力制限許可フラグFbがオンか否かを判定する。出力制限許可フラグFbがオンの場合には、ステップS24へ進み、エンジン10の出力制限を行う。ここでは、例えば、図示しない別ルーチンにより燃料噴射を停止する処理、又はアイドル運転に移行する処理を実施する。
【0036】
一方、出力制限許可フラグFbがオフの場合には、ステップS25へ進み、図示しない別ルーチンにより、通常のエンジン出力制御を実施する。具体的には、アクセルセンサ32からの検出信号に基づいてアクセルペダル31の踏み込み操作量を検出し、その検出したアクセル操作量に基づいて、スロットル開度や燃料噴射量等を制御する。つまり、出力制限許可フラグFbがオフの場合には、アクセルペダル31及びブレーキペダル34が共に踏み込まれた状態になったときにも、エンジンの出力制限を実施せず、アクセル操作量に応じた駆動力が出力されるようエンジン10を制御する。
【0037】
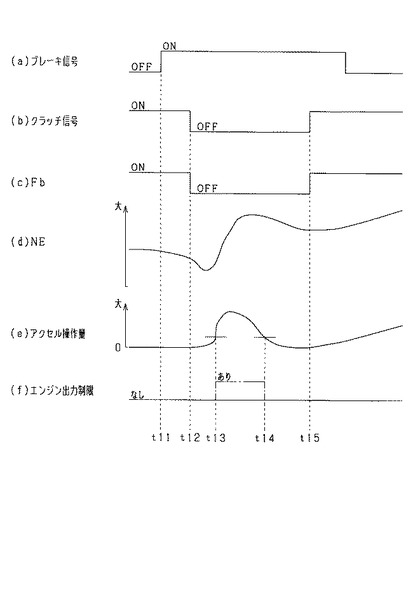
次に、本システムにおけるエンジン制御の具体的態様を、図4のタイムチャートを用いて説明する。図中、(a)はブレーキセンサ35のON/OFF信号の推移、(b)はクラッチセンサ33のON/OFF信号の推移、(c)は出力制限許可フラグFbのON/OFFの推移、(d)はエンジン回転速度の推移、(e)はアクセル操作量の推移、(f)はエンジン出力制限の実施/未実施の推移を示す。なお、(f)中、一点鎖線は、クラッチ操作に関係なく、アクセル踏込み状態かつブレーキ踏込み状態のときにエンジン出力制限を行う場合を示し、実線は、クラッチ踏込み状態においてエンジン10の出力制限を禁止する場合を示す。また、図4では、ドライバがヒールアンドトウの操作を行う場合を想定している。
【0038】
図4において、例えばコーナへの進入手前でドライバによりブレーキペダル34が踏み込まれ(t11)、その後、クラッチペダル17が踏み込まれた場合、クラッチペダル17の踏み込みのタイミングt12で、出力制限許可フラグFbがオンからオフに切り替えられる。したがって、クラッチペダル17の踏み込み後、シフトダウン時のショックを抑制するべく(変速機15側の歯車回転速度とエンジン10側の歯車回転速度とを合わせるべく)、期間t13〜t14で、ドライバがブレーキペダル34を踏み込んだままアクセルペダル31の踏み込み操作を行った場合にも、(f)に実線で示すように、そのアクセル操作によってはエンジン10の出力制限が実施されない。
【0039】
その後、クラッチペダル17の踏み込み操作が解除されると、クラッチ踏み込み解除のタイミングt15で出力制限許可フラグFbがオフからオンに切り替えられる。これにより、ヒールアンドトウの操作終了後には、アクセルペダル31及びブレーキペダル34の両踏み状態が生じた場合にエンジン10の出力制限が実施される。
【0040】
以上詳述した本実施形態によれば、次の優れた効果が得られる。
【0041】
アクセル及びブレーキの両踏み状態では、基本的にはエンジン10の出力制限を実施することで車両の安全確保を図ることとし、一方、クラッチ手段が動力遮断状態になっている場合、より具体的には、クラッチペダル17が踏み込み状態になっている場合には、上記のエンジン出力制限を禁止する構成とした。したがって、ドライバによりヒールアンドトウの操作が行われ、アクセルペダル及びクラッチペダルの両踏み状態が生じた場合に、エンジン10の出力制限が実施されるのを回避することができる。これにより、ドライバの意図したとおりにエンジン出力を制御することができる。
【0042】
また、クラッチペダル17の踏み込み解除が検出された場合にエンジン10の出力制限を解除する構成としたため、エンジン10の出力制限の禁止をヒールアンドトウの操作に必要な期間に限って行うことができる。
【0043】
(他の実施形態)
本発明は上記実施形態の記載内容に限定されず、例えば次のように実施されてもよい。
【0044】
・上記実施形態では、ドライバによるクラッチペダル17の踏み込み操作に伴いクラッチ装置14が動力遮断状態になっていることが検出された場合に出力制限許可フラグFbをオフにした。これに対し、本構成では、ブレーキペダル34が踏み込まれている期間内にクラッチ装置14が動力遮断状態に移行したことが検出された場合に、出力制限許可フラグFbをオフにする構成とする。ドライバがヒールアンドトウの操作を行う場合、一般に、クラッチペダル17の踏み込み操作よりもブレーキペダル34の踏み込み操作が先に行われるとともに、そのブレーキ踏み込み状態においてクラッチ操作が行われる(図4参照)。したがって、上記構成とすることにより、クラッチペダル17の踏み込み操作が、ヒールアンドトウを目的とする操作であるか否かを正確に判断することができる。
【0045】
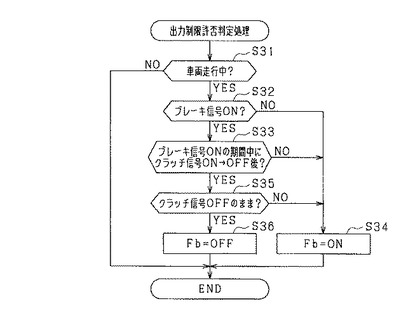
図5は、エンジン出力制限の実施の許否を判定する判定条件として、ブレーキ踏み込み操作に関する条件を含む場合のエンジン制御のフローチャートである。図5において、ステップS31では車両走行中か否かを判定し、ステップS31がYESの場合、ステップS32へ進み、ブレーキセンサ35からのブレーキ信号に基づいて、ブレーキペダル34が踏み込まれているブレーキ踏み込み状態であるか否かを判定する。ブレーキ踏み込み状態の場合、ステップS33へ進み、クラッチセンサ33からのクラッチ信号に基づいて、そのブレーキ踏み込み状態の期間内にクラッチペダル17が踏み込み解除状態から踏み込み状態に移行した後であるか否かを判定する。ステップS33がYESの場合、ステップS35で、クラッチ踏み込み状態のままであるか否かを判定し、ステップS35がYESの場合、ステップS36において出力制限許可フラグFbをオフにする。
【0046】
・エンジン出力制限の実施の許否を判定する判定条件として、アクセルペダル31の踏み込み操作の有無に関する条件を加えてもよい。具体的には、アクセルペダル31が踏み込まれていないアクセル非踏込状態の期間内にクラッチ装置14が動力遮断状態に移行したことが検出された場合に、出力制限許可フラグFbをオフにする。ドライバがヒールアンドトウの操作を行う場合、通常、クラッチペダル17の踏み込み操作が行われた後、アクセルペダル31の踏み込みによる回転速度合わせが行われる(図4参照)。したがって、上記構成とすることにより、クラッチペダル17の踏み込み操作が、ヒールアンドトウを目的とする操作であるか否かを正確に判断することができる。
【0047】
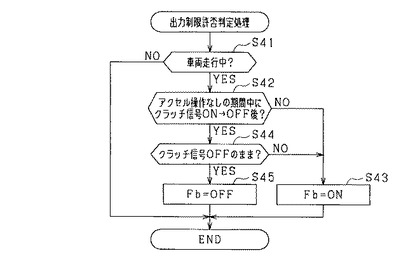
図6は、エンジン出力制限の実施の許否を判定する判定条件として、アクセル踏み込み操作の有無に関する条件を含む場合のエンジン制御のフローチャートである。図6において、ステップS41では車両走行中か否かを判定する。ステップS42では、アクセルペダル31が踏み込まれていない状態の期間内にクラッチペダル17が踏み込み解除状態から踏み込み状態に移行した後であるか否かを判定する。ステップS42がYESの場合、ステップS44で、クラッチ踏み込み状態のままであるか否かを判定し、ステップS44がYESの場合、ステップS45へ進み、出力制限許可フラグFbをオフにする。
【0048】
・エンジン出力制限の実施の許否を判定する判定条件として、ブレーキ踏み込み操作の有無に関する条件と、アクセル踏み込み操作の有無に関する条件とを含むものとし、ブレーキペダル34が踏み込まれているブレーキ踏込状態であって、かつアクセルペダル31が踏み込まれていないアクセル非踏込状態の期間内にクラッチ装置14が動力遮断状態に移行したことが検出された場合に、出力制限許可フラグFbをオフにする構成にしてもよい。
【0049】
・上記実施形態では、クラッチペダル17の踏み込みが解除された場合に出力制限許可フラグFbをオンにした(エンジン10の出力制限の禁止を解除した)が、少なくともヒールアンドトウの操作に必要な期間、エンジン10の出力制限の禁止を行うものであれば、出力制限の禁止を解除するタイミングは上記に限定しない。例えば、クラッチ踏み込み操作後において、アクセル操作に伴うエンジン回転速度の回転上昇量を検出し、検出した回転上昇量に基づいて、エンジン10の出力制限の実施を解除する。つまり、アクセルペダル31の踏み込みによる回転速度合わせが実施された後のタイミングで、エンジン10の出力制限の禁止を解除する。具体的には、アクセルペダル31が踏み込まれてからのエンジン回転速度の回転上昇量(検出値)と、予め定めた判定値とを比較し、検出値が判定値よりも大きくなった場合に出力制限許可フラグFbをオフからオンにする。なお、判定値については、例えばアクセル踏み込み時の車速等に基づいて可変に設定してもよい。また、回転上昇量と判定値とを比較する構成に代えて、回転上昇量の変化量と予め定めた判定値とを比較し、該変化量が判定値よりも小さくなった場合に出力制限許可フラグFbをオフからオンにする構成としてもよい。
【0050】
・クラッチペダル17の踏み込みタイミングから所定時間が経過したタイミングでエンジン10の出力制限を解除する構成としてもよい。この場合、所定時間については、例えばヒールアンドトウの操作に要する時間に基づいて予め定めておくとよい。
【0051】
・ヒールアンドトウの一連の操作では、クラッチ装置14の動力伝達状態から動力遮断状態への移行後において、シフト位置がシフトダウン側に変更される。したがって、クラッチ装置14の動力遮断状態への移行後においてシフト位置がシフトアップ側に変更された場合、該クラッチ操作は、ヒールアンドトウを目的とした操作ではないと言える。これに鑑み、クラッチペダル17が踏み込まれた場合にエンジン10の出力制限を禁止する本構成において、クラッチ踏み込み後にシフト位置の変更方向を検出し、その変更方向がシフトアップ側である場合に、エンジン10の出力制限の禁止を解除する。こうすることにより、クラッチ操作に基づいてエンジン出力制限を一旦禁止した場合にも、その後においてヒールアンドトウの操作が実施されないと判断された時点でエンジン10の出力制限の禁止を解除することができる。
【0052】
・変速機15の変速段を切り替える際に、1回目のクラッチ操作でニュートラルギヤに変更し、2回目のクラッチ操作で所望のギヤにシフトするダブルクラッチの操作が行われることがある。この操作では、1回目のクラッチ操作と2回目のクラッチ操作との間の期間において、クラッチペダル17の踏み込みが解除された状態でブレーキペダル34とアクセルペダル31との両踏み状態が生じることがある。そのため、クラッチ踏込み解除に伴いエンジン10の出力制限の禁止を解除した場合、ダブルクラッチの操作時に、ドライバの意に反してエンジン出力制限が行われることが考えられる。
【0053】
これに鑑み、本構成では、1回目のクラッチ操作が行われてからの所定時間をエンジン10の出力制限を禁止する期間(禁止確定期間)として設定する。なお、上記所定時間(禁止確定期間)は、ダブルクラッチ操作において1回目のクラッチ操作が行われてからアクセルペダル31の踏み込みが行われるまでの所要時間に基づいて予め定めておく。そして、クラッチペダル17が踏み込まれてから禁止確定期間が経過するまでは、クラッチペダル17の踏み込み操作が解除された場合にも、エンジン出力制限の禁止を継続する(エンジン出力制限の禁止解除を行わない)構成とする。このとき、禁止確定期間内にアクセルペダル31の踏み込みが検出された場合には、その期間経過後にエンジン10の出力制限の禁止をそのまま継続する。一方、同期間内にアクセルペダル31の踏み込みが検出されなかった場合には、禁止確定期間の経過後にエンジン10の出力制限の禁止を解除する。
【0054】
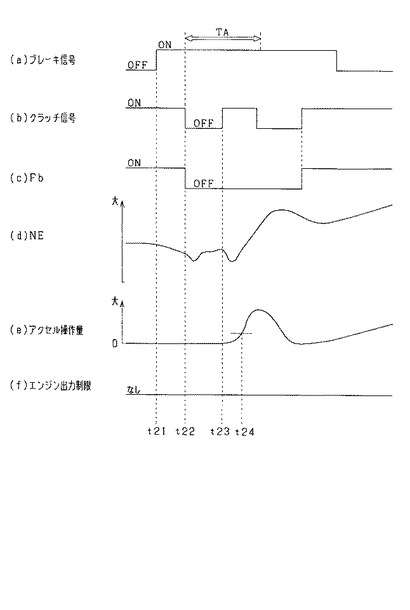
図7は、ダブルクラッチが行われることを想定した場合のエンジン制御の具体的態様を示すタイムチャートである。図中、(a)はブレーキセンサ35のON/OFF信号の推移、(b)はクラッチセンサ33のON/OFF信号の推移、(c)は出力制限許可フラグFbのON/OFFの推移、(d)はエンジン回転速度の推移、(e)はアクセル操作量の推移、(f)はエンジン出力制限の実施/未実施の推移を示す。
【0055】
図7において、車両走行中のタイミングt21でブレーキペダル34が踏み込まれ、タイミングt22でクラッチペダル17が踏み込まれた場合、そのタイミングt22で出力制限許可フラグFbがオンからオフに切り替えられる。また、このとき、タイミングt22から所定時間αが経過するまでの期間TAを禁止確定期間として設定し、同期間では出力制限許可フラグFbをオフのままにする。この構成では、禁止確定期間TA内のタイミングt23で、クラッチペダル17の踏み込みが解除され、かつクラッチ踏込み解除状態のタイミングt24でアクセルペダル31が踏み込まれた場合にも、エンジン10の出力制限が実施されない。
【0056】
・ダブルクラッチ対応のための構成としては、上記構成に代えて、1回目のクラッチ操作が行われてから2回目のクラッチ操作が行われるまでの所要時間に基づいて禁止確定期間を設定してもよい。この場合、禁止確定期間内にクラッチペダル17の踏み込みが検出された場合には、禁止確定期間経過後においてもエンジン10の出力制限の禁止をそのまま継続する。一方、同期間内にクラッチペダル17の踏み込みが検出されなかった場合には、禁止期間経過後にエンジン10の出力制限の禁止を解除する。
【0057】
・ダブルクラッチ対応のための構成としては、クラッチペダル17の踏み込みに伴うエンジン出力制限の禁止中においてアクセルペダル31の踏み込み操作が行われないままクラッチペダル17の踏込み状態が解除されたか否かを判定する手段を備え、同手段で肯定判定された場合に、クラッチペダル17の踏み込み解除から所定期間、エンジン10の出力制限の禁止を継続する構成としてもよい。
【0058】
・上記実施形態では、変速機として手動変速機15を備える車両に適用する場合について説明したが、ドライバによるシフト装置のシフト位置に応じて変速比が自動で切り替えられる自動変速機を備える車両に適用することもできる。具体的には、当該システムは、ドライバによるシフト位置のシフトダウン側への変更操作があったことを検出するシフトダウン検出手段を備え、該シフトダウン検出手段の検出結果に基づいて、エンジン10と自動変速機との間が動力遮断状態になっていることを検出する。なお、本構成では、シフト装置及び自動変速機により、動力の遮断及び伝達を行うクラッチ手段が構成され、シフト位置を検出するシフト位置センサによりシフトダウン検出手段が構成されている。そして、シフト位置のシフトダウン側への変更があったことが検出された場合、その変更のタイミング直後の所定期間では、エンジン10と変速機との間が動力遮断状態になり、ドライバによりヒールアンドトウの操作が行われる場合があることに鑑み、エンジン10の出力制限の実施を禁止する。
【0059】
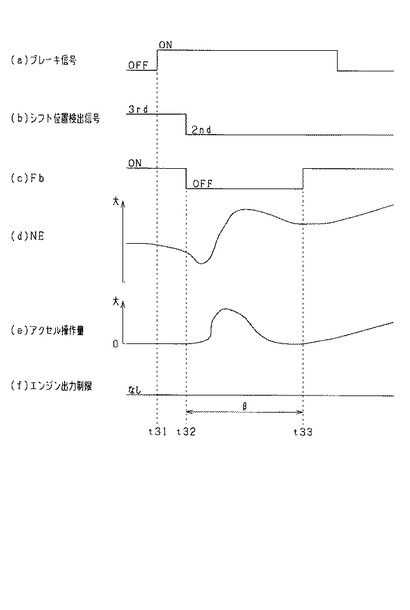
図8に、自動変速機を備える車両におけるエンジン制御の具体的態様を示すタイムチャートを示す。図中、(a)はブレーキセンサ35のON/OFF信号の推移、(b)はシフト装置のシフト位置の推移、(c)は出力制限許可フラグFbのON/OFFの推移、(d)はエンジン回転速度の推移、(e)はアクセル操作量の推移、(f)はエンジン出力制限の実施/未実施の推移を示す。
【0060】
図8において、車両走行中のタイミングt31で、ドライバによりブレーキペダル34が踏み込まれ、その後、タイミングt32で、シフト位置がシフトダウン側へ変更された場合(図8では、3速から2速に変更された場合)を考える。この場合、タイミングt32で、出力制限許可フラグFbをオンからオフに切り替えるとともに、タイミングt32から所定時間βの間、Fb=OFFのままにする。これにより、自動変速機を備える車両においてヒールアンドトウの操作が行われた場合にも、その操作中にエンジン出力制限が行われるのを回避することができる。
【符号の説明】
【0061】
10…エンジン、14…クラッチ装置(クラッチ手段)、15…手動変速機、17…クラッチペダル(クラッチ手段)、18…シフト装置、30…ECU(両踏み検出手段、出力制限手段、クラッチ検出手段、出力制限禁止手段、ブレーキ検出手段、移行検出手段、アクセル検出手段、回転量検出手段、期間設定手段、アクセル操作判定手段)、32…アクセルセンサ、35…ブレーキセンサ、36…シフト位置センサ。
【技術分野】
【0001】
本発明は、車両用のエンジン制御装置に関し、詳しくは、アクセルペダルとブレーキペダルとの両方が踏み込み状態になった場合のエンジン制御に関する。
【背景技術】
【0002】
ドライバがアクセルペダルとブレーキペダルとを誤って両踏みした場合や、ドライバの操作とは無関係にアクセルペダルが踏み込み状態になった場合、ドライバの要求どおりに車両の走行を実施できないことが考えられる。その反面、アクセルペダルとブレーキペダルとが両踏みされたからといって、それが必ずしもドライバの意思に反するものではないことも考えられる。このような観点から、従来、アクセルペダルとブレーキペダルとの両方が踏み込まれた場合の措置について種々提案されている(例えば、特許文献1参照)。
【0003】
具体的には、特許文献1のシステムでは、コーナリング等における特殊な運転技術ではドライバが意図的にアクセルペダル及びブレーキペダルを同時に踏み込むことを考慮し、ドライバが意図的にブレーキペダルとアクセルペダルとを同時に踏み込み操作した場合のブレーキペダル踏込量の上限値を予め定めて記憶しておく。そして、ブレーキペダルとアクセルペダルとの同時踏み込みが生じた場合、ブレーキペダル踏込量の検出値が上限値未満のときには、ドライバが意図的にアクセルペダル及びブレーキペダルを同時に踏み込んだものとして、エンジン出力を目標値で制御する。一方、ブレーキペダル踏込量の検出値が上限値以上のときには、ドライバが誤ってアクセルペダルとブレーキペダルとを両踏みしたものとして、エンジンを強制的にアイドル状態にする。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−291030号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、アクセルペダル及びブレーキペダルを両踏みする際のブレーキペダルの踏込量は、ドライバの個人差や都度の操作毎に相違すると考えられる。具体的には、例えばドライバが誤って両踏みした場合でも、ブレーキペダルが軽く踏まれた状態であることもあれば、逆に、ドライバが意図的に両踏みした場合でも、ブレーキペダルが大きく踏み込まれることがある。したがって、ブレーキペダル踏込量の検出値と所定値との単なる比較では、ドライバが意図的にアクセルペダル及びブレーキペダルを同時に踏み込んだのか、それともドライバの意思に反して両踏み状態になっているのかを正確に特定できないおそれがある。かかる場合、ドライバが意図的にアクセルペダルとブレーキペダルとを両踏みしたときにも、エンジンの出力制限が行われてしまい、ドライバの走行要求を満たすことができないことが考えられる。
【0006】
本発明は、上記課題に鑑みなされたものであり、ドライバの走行要求に見合うエンジンの出力制御を実施することができるエンジン制御装置を提供することを主たる目的とする。
【課題を解決するための手段】
【0007】
本発明は、上記課題を解決するために、以下の手段を採用した。
【0008】
本発明は、エンジンと変速機との間の動力の伝達及び遮断を行うクラッチ手段を備える車両に適用されるエンジン制御装置に関する。また、請求項1に記載の発明では、アクセルペダルが踏み込まれているアクセル踏込状態であって、かつブレーキペダルが踏み込まれているブレーキ踏込状態である両踏み状態であることを検出する両踏み検出手段と、前記両踏み検出手段により両踏み状態であることが検出された場合にエンジンの出力を制限する出力制限処理を実施する出力制限手段と、前記クラッチ手段が動力遮断状態になっていることを検出するクラッチ検出手段と、前記クラッチ検出手段により前記クラッチ手段が動力遮断状態になっていることが検出された場合に前記出力制限処理の実施を禁止する出力制限禁止手段と、を備えることを特徴とする。
【0009】
コーナリング等で用いられる運転技術の一つとして、ヒールアンドトウの技法がある。ヒールアンドトウの操作では、ドライバの意思によってアクセルペダル及びブレーキペダルが両踏み操作されるが、その一連の操作においては、まず、ドライバにより、クラッチ手段が動力伝達状態から動力遮断状態に移行される。上記発明では、クラッチ手段が動力遮断状態に移行した場合には、その後においてドライバの意思に基づいてアクセルペダル及びクラッチペダルの両踏み状態が生じる場合があることに着目し、クラッチ手段が動力遮断状態になっている場合にエンジンの出力制限を禁止する。よって、ドライバによりヒールアンドトウが行われ、アクセルペダル及びクラッチペダルの両踏み状態が生じた場合に、エンジンの出力制限が行われるのを回避することができる。その結果、ドライバの意図したとおりにエンジン出力を制御することができる。
【0010】
請求項2に記載の発明では、前記ブレーキ踏込状態であることを検出するブレーキ検出手段と、前記クラッチ検出手段による検出結果に基づいて、前記クラッチ手段が動力伝達状態から動力遮断状態に移行したことを検出する移行検出手段と、を備え、前記出力制限禁止手段は、前記ブレーキ検出手段により前記ブレーキ踏込状態であることが検出されている期間内において前記移行検出手段により動力遮断状態に移行したことが検出された場合に、前記出力制限処理の実施を禁止する。
【0011】
ヒールアンドトウの操作では、通常、クラッチ手段が動力遮断状態に移行される前にブレーキ操作が行われ、そのブレーキ操作が継続された状態でクラッチ手段が動力遮断状態に移行される。これに鑑み、上記構成とすることにより、クラッチ手段の動力遮断状態への移行が、ヒールアンドトウを目的とした操作かそうでないかの判断を正確に行うことができる。
【0012】
また、ヒールアンドトウの操作では、クラッチ手段が動力遮断状態に移行する時点ではアクセルペダルは未だ踏み込まれておらず、クラッチ手段の動力遮断状態への移行後において、変速機側とエンジン側との歯車回転速度を合わせるべくアクセル操作が行われることで、アクセル及びブレーキの両踏み状態が生じる。
【0013】
これに鑑み、請求項3に記載の発明では、アクセルペダルが踏み込まれていないアクセル非踏込状態であることを検出するアクセル検出手段と、前記クラッチ検出手段による検出結果に基づいて、前記クラッチ手段が動力伝達状態から動力遮断状態に移行したことを検出する移行検出手段と、を備え、前記出力制限禁止手段は、前記アクセル検出手段によりアクセル非踏込状態であることが検出されている期間内において前記移行検出手段により動力遮断状態に移行したことが検出された場合に、前記出力制限処理の実施を禁止する。この構成によれば、クラッチ手段の動力遮断状態への移行がヒールアンドトウを目的としたものであるか否かをより正確に判断することができる。
【0014】
ここで、エンジンの出力制限を禁止する期間は、車両安全確保の観点からすると、ヒールアンドトウの操作に必要な最低限の長さにするのが望ましい。これに鑑み、請求項4に記載の発明では、前記クラッチ検出手段により動力遮断状態になっていることが検出された後に、アクセルペダルの踏み込みに伴うエンジン回転速度の回転上昇量を検出する回転量検出手段を備え、前記回転量検出手段により検出した回転上昇量に基づいて、前記出力制限禁止手段による前記出力制限処理の実施の禁止を解除する。この構成によれば、アクセル操作に伴い、エンジン回転速度が、変速機側とエンジン側との歯車回転速度を合わせるのに必要な量だけ上昇した時点でエンジン出力制限の禁止を解除することができる。したがって、ヒールアンドトウの操作時にエンジン出力制限が実施されるのを回避しつつ、そのエンジン出力制限の禁止期間をできるだけ短くすることができる。
【0015】
変速機として手動変速機を適用する場合、請求項5に記載の発明のように、前記クラッチ手段は、ドライバによるクラッチペダルの踏み込み操作に応じて前記動力の伝達及び遮断を行うものであり、前記クラッチ検出手段は、クラッチペダルが踏み込まれているクラッチ踏込み状態になっていることを検出することにより、前記クラッチ手段が動力遮断状態になっていることを検出する手段であり、前記出力制限手段は、前記クラッチ検出手段によりクラッチ踏込み状態になっていることが検出された場合に、前記出力制限処理の実施を禁止する構成にするとよい。
【0016】
請求項6に記載の発明では、前記クラッチ手段が動力遮断状態になっているときの前記変速機のシフト位置の変更方向を検出するシフト方向検出手段を備え、前記シフト方向検出手段により検出された変更方向がシフトアップ側である場合に、前記出力制限禁止手段による前記出力制限処理の実施の禁止を解除する。ヒールアンドトウの操作では、変速機のシフト位置がシフトダウン側に変更される。つまり、クラッチ手段が動力遮断状態に移行し、その後、変速機のシフト位置がシフトアップ側に変更された場合には、そのクラッチ操作はヒールアンドトウのための操作でないと判断することができる。したがって、上記構成とすることにより、アクセル及びブレーキの両踏み時のエンジン出力制限が不必要に禁止されるのを回避することができる。
【0017】
ところで、手動変速機を備える車両では、ヒールアンドトウの操作に際し、1回目のクラッチ操作でニュートラルギヤに変更し、2回目のクラッチ操作で所望のギヤにシフトするダブルクラッチの操作が行われることがある。この操作では、1回目のクラッチ操作と2回目のクラッチ操作との間の期間に、クラッチ手段の動力伝達状態においてアクセルペダル及びブレーキペダルの両踏み状態が生じることがある。したがって、クラッチ手段が動力伝達状態に戻った時点で、ヒールアンドトウの操作が完了したものとしてエンジンの出力制限禁止を解除すると、その後、ヒールアンドトウを行うべくアクセルペダルが踏み込まれた時に、エンジンの出力制限が実施されることが考えられる。
【0018】
その点に鑑み、請求項7に記載の発明では、前記クラッチ手段が動力伝達状態から動力遮断状態に移行してからの所定期間を、前記出力制限処理の実施を禁止する禁止確定期間として設定する期間設定手段と、前記設定手段により設定した禁止確定期間内において、アクセルペダルの踏み込み操作があったか否かを判定するアクセル操作判定手段と、を備え、前記アクセル操作判定手段により前記禁止確定期間内にアクセルペダルの踏み込み操作有りと判定された場合に、前記禁止確定期間の経過後において前記出力制限処理の禁止を継続し、踏み込み操作無しと判定された場合に、前記禁止確定期間が経過した後、前記出力制限処理の禁止を解除する。本構成によれば、クラッチ手段が動力遮断状態に移行した後のアクセル操作に応じて、エンジンの出力制限禁止を継続するか、それとも解除するかを判断するため、ダブルクラッチ操作が行われた場合にも、ドライバの意図したとおりにエンジン出力を制御することができる。
【0019】
また、本発明は、自動変速機を備える車両に適用してもよい。この場合、請求項8に記載の発明のように、前記クラッチ手段は、ドライバによる前記変速機のシフト位置の変更操作に応じて前記動力の伝達及び遮断を行うものであり、前記クラッチ検出手段は、前記シフト位置のシフトダウン側への変更操作があったことを検出することにより、前記クラッチ手段が動力遮断状態になっていることを検出する手段であり、前記出力制限手段は、前記クラッチ検出手段により前記シフト位置のシフトダウン側への変更操作があったことが検出された場合に前記出力制限処理の実施を禁止する構成にするとよい。
【図面の簡単な説明】
【0020】
【図1】エンジン制御システムの全体概略構成図。
【図2】エンジン出力制限の許否判定処理を示すフローチャート。
【図3】エンジン出力制限処理を示すフローチャート。
【図4】本システムのエンジン制御の具体的態様を示すタイムチャート。
【図5】他の実施形態のエンジン出力制限の許否判定処理を示すフローチャート。
【図6】他の実施形態のエンジン出力制限の許否判定処理を示すフローチャート。
【図7】他の実施形態のエンジン制御の具体的態様を示すタイムチャート。
【図8】他の実施形態のエンジン制御の具体的態様を示すタイムチャート。
【発明を実施するための形態】
【0021】
以下、本発明を具体化した実施形態を図面に基づいて説明する。本実施形態は、車載エンジンを対象にエンジン制御システムを構築するものとしており、エンジンと手動式変速機(マニュアルトランスミッション)とを搭載した車両に具体化している。当該制御システムにおいては、電子制御ユニット(以下、ECUという)を中枢として、エンジンの燃料噴射制御や点火制御等を実施する。このエンジン制御システムの全体概略構成図を図1に示す。
【0022】
図1に示すように、エンジン10は、例えば多気筒ガソリンエンジンであり、気筒ごとに燃料噴射手段としてのインジェクタ11と、点火手段としての点火装置12(イグナイタ等)とを備えている。また、エンジン10の出力軸(クランク軸)13には、クラッチ装置14を介して手動変速機15が接続されている。
【0023】
クラッチ装置14は、エンジン出力軸13に接続されたエンジン10側の円板14a(フライホイール等)と、トランスミッション入力軸16に接続された手動変速機15側の円板14b(クラッチディスク等)とを備えている。クラッチ装置14では、ドライバによるクラッチペダル17の踏込み操作又は踏込み解除操作により、両円板14a,14b同士が接触及び離間のいずれかの状態に切り替えられる。詳しくは、ドライバによりクラッチペダル17が踏み込まれると、両円板14a,14bが相互に離れてエンジン10から手動変速機15への動力が遮断され、その踏込み操作が解除されると、両円板14a,14bが相互に接触してエンジン10から手動変速機15に動力が伝達される。なお、クラッチ装置14及びクラッチペダル17により、ドライバによる操作に応じて動力の遮断及び伝達を行うクラッチ手段が構成されている。
【0024】
手動変速機15は、ドライバによるシフト装置18の手動操作により変速比が切り替えられるマニュアルトランスミッションであり、複数段の前進ギヤと、後退ギヤと、ニュートラルギヤとを備えている。手動変速機15では、都度のシフト位置に応じた変速比により、トランスミッション入力軸16の回転がトランスミッション出力軸19の回転に変換される。
【0025】
トランスミッション出力軸19には、ディファレンシャルギヤ21や車軸22等を介して車輪(駆動輪)23が接続されている。また、車輪23には、図示しない油圧回路等により駆動され、各車輪23に対して制動力を付与するブレーキアクチュエータ24が設けられている。
【0026】
ECU30は、周知のマイクロコンピュータ等を備えてなる電子制御装置(制御手段)であり、本システムに設けられている各種センサの検出結果等に基づいて、インジェクタ11による燃料噴射制御、点火装置12による点火制御などの各種エンジン制御や、ブレーキアクチュエータ24による制動制御等を実施する。センサ類について詳しくは、ECU30には、アクセル操作部材としてのアクセルペダル31の踏み込み操作量を検出するアクセルセンサ32、クラッチペダル17の踏み込み/踏み込み解除を検出するクラッチセンサ33、ブレーキペダル34の踏み込み/踏み込み解除を検出するブレーキセンサ35、シフト装置18のシフト位置を検出するシフト位置センサ36、エンジン回転速度を検出する回転速度センサ37等が接続されており、これら各センサの検出信号がECU30に逐次入力される。その他、本システムには、図示しない負荷センサ(エアフロメータ、吸気圧センサ)等が設けられている。
【0027】
ところで、車両走行中において、ドライバがブレーキペダル34を踏み損なってアクセルペダル31も同時に踏み込んでしまったり、あるいはフロアマットのずれ等に起因してドライバの意思とは無関係にアクセルペダル31が押し下げられたりすることがある。この場合、ドライバの意に反して、アクセルペダル31及びブレーキペダル34が共に踏み込み操作されている両踏み状態になり、ドライバがブレーキペダル34を踏み込んでいるにもかかわらず、ドライバの要求に見合う車両制動力が出力されないことが懸念される。
【0028】
これに鑑み、本システムでは、アクセルペダル31及びブレーキペダル34が両踏み状態であるか否かを判定し、両踏み状態であると判定された場合に、エンジン10の出力制限を実施することとしている。これにより、車両の安全確保を図るようにしている。この場合の出力制限処理としては、例えば燃料噴射を停止する処理、アイドル運転に移行する処理等を含む。
【0029】
その一方で、アクセルペダル31及びブレーキペダル34が共に踏み込まれたからといって、その両踏み状態が必ずしもドライバの意思に反するものではない場合もある。具体的には、ドライバがコーナリング時にヒールアンドトウの操作を行う場合、アクセルペダル31及びブレーキペダル34の両踏み状態が生じるが、この場合の両踏み状態は、ドライバの意思に基づくものである。よって、かかる場合にエンジン10の出力制限を行うと、ドライバの要求どおりに車両の走行を実施できないことが考えられる。
【0030】
そこで、本実施形態では、ヒールアンドトウによる運転時には、アクセル及びブレーキが両踏み状態になる前にシフト装置18のシフト操作が行われることに着目し、車両走行中において、クラッチ装置14が動力遮断状態になっていることを検出する。そして、クラッチ装置14が動力遮断状態になっていることが検出された場合に、アクセルペダル31及びブレーキペダル34が両踏み操作された際のエンジン出力制限の実施を禁止することとしている。
【0031】
次に、本実施形態のエンジン制御の処理手順を、図2及び図3のフローチャートを用いて説明する。ここで、図2は、エンジン出力制限の許否判定処理を示し、図3は、エンジン出力制限処理を示す。これらの処理は、ECU30により所定周期毎に実行される。
【0032】
まず、図2の許否判定処理について説明する。図2において、ステップS11では車両走行中か否かを判定し、ステップS11がYESの場合、ステップS12へ進む。ステップS12では、クラッチセンサ33からのクラッチ信号(ON/OFF信号)に基づいて、クラッチペダル17が踏み込まれているクラッチ踏み込み状態であるか否かを判定する。
【0033】
クラッチペダル17が踏み込まれていない場合(クラッチセンサ33からON信号を入力している場合)には、ステップS12で否定判定され、ステップS13へ進み、出力制限許可フラグFbをオンにする。一方、クラッチ踏み込み状態の場合(クラッチセンサ33からOFF信号を入力している場合)には、ステップS14へ進み、出力制限許可フラグFbをオフにする。
【0034】
続いて、図3の出力制限処理について説明する。図3において、ステップS21では、ブレーキセンサ35からのブレーキ信号(ON/OFF信号)に基づいて、ブレーキペダル34が踏み込まれているブレーキ踏み込み状態であるか否かを判定する。なお、本実施形態では、ブレーキ踏み込み状態の場合に、ブレーキセンサ35からON信号が出力され、ブレーキ踏み込み解除状態の場合に、ブレーキセンサ35からOFF信号が出力される。
【0035】
ステップS22では、アクセルセンサ32からのアクセル信号に基づいて、アクセルペダル31が踏み込まれているアクセル踏み込み状態であるか否かを判定する。そして、ステップS21及びステップS22で肯定判定された場合、ステップS23へ進み、出力制限許可フラグFbがオンか否かを判定する。出力制限許可フラグFbがオンの場合には、ステップS24へ進み、エンジン10の出力制限を行う。ここでは、例えば、図示しない別ルーチンにより燃料噴射を停止する処理、又はアイドル運転に移行する処理を実施する。
【0036】
一方、出力制限許可フラグFbがオフの場合には、ステップS25へ進み、図示しない別ルーチンにより、通常のエンジン出力制御を実施する。具体的には、アクセルセンサ32からの検出信号に基づいてアクセルペダル31の踏み込み操作量を検出し、その検出したアクセル操作量に基づいて、スロットル開度や燃料噴射量等を制御する。つまり、出力制限許可フラグFbがオフの場合には、アクセルペダル31及びブレーキペダル34が共に踏み込まれた状態になったときにも、エンジンの出力制限を実施せず、アクセル操作量に応じた駆動力が出力されるようエンジン10を制御する。
【0037】
次に、本システムにおけるエンジン制御の具体的態様を、図4のタイムチャートを用いて説明する。図中、(a)はブレーキセンサ35のON/OFF信号の推移、(b)はクラッチセンサ33のON/OFF信号の推移、(c)は出力制限許可フラグFbのON/OFFの推移、(d)はエンジン回転速度の推移、(e)はアクセル操作量の推移、(f)はエンジン出力制限の実施/未実施の推移を示す。なお、(f)中、一点鎖線は、クラッチ操作に関係なく、アクセル踏込み状態かつブレーキ踏込み状態のときにエンジン出力制限を行う場合を示し、実線は、クラッチ踏込み状態においてエンジン10の出力制限を禁止する場合を示す。また、図4では、ドライバがヒールアンドトウの操作を行う場合を想定している。
【0038】
図4において、例えばコーナへの進入手前でドライバによりブレーキペダル34が踏み込まれ(t11)、その後、クラッチペダル17が踏み込まれた場合、クラッチペダル17の踏み込みのタイミングt12で、出力制限許可フラグFbがオンからオフに切り替えられる。したがって、クラッチペダル17の踏み込み後、シフトダウン時のショックを抑制するべく(変速機15側の歯車回転速度とエンジン10側の歯車回転速度とを合わせるべく)、期間t13〜t14で、ドライバがブレーキペダル34を踏み込んだままアクセルペダル31の踏み込み操作を行った場合にも、(f)に実線で示すように、そのアクセル操作によってはエンジン10の出力制限が実施されない。
【0039】
その後、クラッチペダル17の踏み込み操作が解除されると、クラッチ踏み込み解除のタイミングt15で出力制限許可フラグFbがオフからオンに切り替えられる。これにより、ヒールアンドトウの操作終了後には、アクセルペダル31及びブレーキペダル34の両踏み状態が生じた場合にエンジン10の出力制限が実施される。
【0040】
以上詳述した本実施形態によれば、次の優れた効果が得られる。
【0041】
アクセル及びブレーキの両踏み状態では、基本的にはエンジン10の出力制限を実施することで車両の安全確保を図ることとし、一方、クラッチ手段が動力遮断状態になっている場合、より具体的には、クラッチペダル17が踏み込み状態になっている場合には、上記のエンジン出力制限を禁止する構成とした。したがって、ドライバによりヒールアンドトウの操作が行われ、アクセルペダル及びクラッチペダルの両踏み状態が生じた場合に、エンジン10の出力制限が実施されるのを回避することができる。これにより、ドライバの意図したとおりにエンジン出力を制御することができる。
【0042】
また、クラッチペダル17の踏み込み解除が検出された場合にエンジン10の出力制限を解除する構成としたため、エンジン10の出力制限の禁止をヒールアンドトウの操作に必要な期間に限って行うことができる。
【0043】
(他の実施形態)
本発明は上記実施形態の記載内容に限定されず、例えば次のように実施されてもよい。
【0044】
・上記実施形態では、ドライバによるクラッチペダル17の踏み込み操作に伴いクラッチ装置14が動力遮断状態になっていることが検出された場合に出力制限許可フラグFbをオフにした。これに対し、本構成では、ブレーキペダル34が踏み込まれている期間内にクラッチ装置14が動力遮断状態に移行したことが検出された場合に、出力制限許可フラグFbをオフにする構成とする。ドライバがヒールアンドトウの操作を行う場合、一般に、クラッチペダル17の踏み込み操作よりもブレーキペダル34の踏み込み操作が先に行われるとともに、そのブレーキ踏み込み状態においてクラッチ操作が行われる(図4参照)。したがって、上記構成とすることにより、クラッチペダル17の踏み込み操作が、ヒールアンドトウを目的とする操作であるか否かを正確に判断することができる。
【0045】
図5は、エンジン出力制限の実施の許否を判定する判定条件として、ブレーキ踏み込み操作に関する条件を含む場合のエンジン制御のフローチャートである。図5において、ステップS31では車両走行中か否かを判定し、ステップS31がYESの場合、ステップS32へ進み、ブレーキセンサ35からのブレーキ信号に基づいて、ブレーキペダル34が踏み込まれているブレーキ踏み込み状態であるか否かを判定する。ブレーキ踏み込み状態の場合、ステップS33へ進み、クラッチセンサ33からのクラッチ信号に基づいて、そのブレーキ踏み込み状態の期間内にクラッチペダル17が踏み込み解除状態から踏み込み状態に移行した後であるか否かを判定する。ステップS33がYESの場合、ステップS35で、クラッチ踏み込み状態のままであるか否かを判定し、ステップS35がYESの場合、ステップS36において出力制限許可フラグFbをオフにする。
【0046】
・エンジン出力制限の実施の許否を判定する判定条件として、アクセルペダル31の踏み込み操作の有無に関する条件を加えてもよい。具体的には、アクセルペダル31が踏み込まれていないアクセル非踏込状態の期間内にクラッチ装置14が動力遮断状態に移行したことが検出された場合に、出力制限許可フラグFbをオフにする。ドライバがヒールアンドトウの操作を行う場合、通常、クラッチペダル17の踏み込み操作が行われた後、アクセルペダル31の踏み込みによる回転速度合わせが行われる(図4参照)。したがって、上記構成とすることにより、クラッチペダル17の踏み込み操作が、ヒールアンドトウを目的とする操作であるか否かを正確に判断することができる。
【0047】
図6は、エンジン出力制限の実施の許否を判定する判定条件として、アクセル踏み込み操作の有無に関する条件を含む場合のエンジン制御のフローチャートである。図6において、ステップS41では車両走行中か否かを判定する。ステップS42では、アクセルペダル31が踏み込まれていない状態の期間内にクラッチペダル17が踏み込み解除状態から踏み込み状態に移行した後であるか否かを判定する。ステップS42がYESの場合、ステップS44で、クラッチ踏み込み状態のままであるか否かを判定し、ステップS44がYESの場合、ステップS45へ進み、出力制限許可フラグFbをオフにする。
【0048】
・エンジン出力制限の実施の許否を判定する判定条件として、ブレーキ踏み込み操作の有無に関する条件と、アクセル踏み込み操作の有無に関する条件とを含むものとし、ブレーキペダル34が踏み込まれているブレーキ踏込状態であって、かつアクセルペダル31が踏み込まれていないアクセル非踏込状態の期間内にクラッチ装置14が動力遮断状態に移行したことが検出された場合に、出力制限許可フラグFbをオフにする構成にしてもよい。
【0049】
・上記実施形態では、クラッチペダル17の踏み込みが解除された場合に出力制限許可フラグFbをオンにした(エンジン10の出力制限の禁止を解除した)が、少なくともヒールアンドトウの操作に必要な期間、エンジン10の出力制限の禁止を行うものであれば、出力制限の禁止を解除するタイミングは上記に限定しない。例えば、クラッチ踏み込み操作後において、アクセル操作に伴うエンジン回転速度の回転上昇量を検出し、検出した回転上昇量に基づいて、エンジン10の出力制限の実施を解除する。つまり、アクセルペダル31の踏み込みによる回転速度合わせが実施された後のタイミングで、エンジン10の出力制限の禁止を解除する。具体的には、アクセルペダル31が踏み込まれてからのエンジン回転速度の回転上昇量(検出値)と、予め定めた判定値とを比較し、検出値が判定値よりも大きくなった場合に出力制限許可フラグFbをオフからオンにする。なお、判定値については、例えばアクセル踏み込み時の車速等に基づいて可変に設定してもよい。また、回転上昇量と判定値とを比較する構成に代えて、回転上昇量の変化量と予め定めた判定値とを比較し、該変化量が判定値よりも小さくなった場合に出力制限許可フラグFbをオフからオンにする構成としてもよい。
【0050】
・クラッチペダル17の踏み込みタイミングから所定時間が経過したタイミングでエンジン10の出力制限を解除する構成としてもよい。この場合、所定時間については、例えばヒールアンドトウの操作に要する時間に基づいて予め定めておくとよい。
【0051】
・ヒールアンドトウの一連の操作では、クラッチ装置14の動力伝達状態から動力遮断状態への移行後において、シフト位置がシフトダウン側に変更される。したがって、クラッチ装置14の動力遮断状態への移行後においてシフト位置がシフトアップ側に変更された場合、該クラッチ操作は、ヒールアンドトウを目的とした操作ではないと言える。これに鑑み、クラッチペダル17が踏み込まれた場合にエンジン10の出力制限を禁止する本構成において、クラッチ踏み込み後にシフト位置の変更方向を検出し、その変更方向がシフトアップ側である場合に、エンジン10の出力制限の禁止を解除する。こうすることにより、クラッチ操作に基づいてエンジン出力制限を一旦禁止した場合にも、その後においてヒールアンドトウの操作が実施されないと判断された時点でエンジン10の出力制限の禁止を解除することができる。
【0052】
・変速機15の変速段を切り替える際に、1回目のクラッチ操作でニュートラルギヤに変更し、2回目のクラッチ操作で所望のギヤにシフトするダブルクラッチの操作が行われることがある。この操作では、1回目のクラッチ操作と2回目のクラッチ操作との間の期間において、クラッチペダル17の踏み込みが解除された状態でブレーキペダル34とアクセルペダル31との両踏み状態が生じることがある。そのため、クラッチ踏込み解除に伴いエンジン10の出力制限の禁止を解除した場合、ダブルクラッチの操作時に、ドライバの意に反してエンジン出力制限が行われることが考えられる。
【0053】
これに鑑み、本構成では、1回目のクラッチ操作が行われてからの所定時間をエンジン10の出力制限を禁止する期間(禁止確定期間)として設定する。なお、上記所定時間(禁止確定期間)は、ダブルクラッチ操作において1回目のクラッチ操作が行われてからアクセルペダル31の踏み込みが行われるまでの所要時間に基づいて予め定めておく。そして、クラッチペダル17が踏み込まれてから禁止確定期間が経過するまでは、クラッチペダル17の踏み込み操作が解除された場合にも、エンジン出力制限の禁止を継続する(エンジン出力制限の禁止解除を行わない)構成とする。このとき、禁止確定期間内にアクセルペダル31の踏み込みが検出された場合には、その期間経過後にエンジン10の出力制限の禁止をそのまま継続する。一方、同期間内にアクセルペダル31の踏み込みが検出されなかった場合には、禁止確定期間の経過後にエンジン10の出力制限の禁止を解除する。
【0054】
図7は、ダブルクラッチが行われることを想定した場合のエンジン制御の具体的態様を示すタイムチャートである。図中、(a)はブレーキセンサ35のON/OFF信号の推移、(b)はクラッチセンサ33のON/OFF信号の推移、(c)は出力制限許可フラグFbのON/OFFの推移、(d)はエンジン回転速度の推移、(e)はアクセル操作量の推移、(f)はエンジン出力制限の実施/未実施の推移を示す。
【0055】
図7において、車両走行中のタイミングt21でブレーキペダル34が踏み込まれ、タイミングt22でクラッチペダル17が踏み込まれた場合、そのタイミングt22で出力制限許可フラグFbがオンからオフに切り替えられる。また、このとき、タイミングt22から所定時間αが経過するまでの期間TAを禁止確定期間として設定し、同期間では出力制限許可フラグFbをオフのままにする。この構成では、禁止確定期間TA内のタイミングt23で、クラッチペダル17の踏み込みが解除され、かつクラッチ踏込み解除状態のタイミングt24でアクセルペダル31が踏み込まれた場合にも、エンジン10の出力制限が実施されない。
【0056】
・ダブルクラッチ対応のための構成としては、上記構成に代えて、1回目のクラッチ操作が行われてから2回目のクラッチ操作が行われるまでの所要時間に基づいて禁止確定期間を設定してもよい。この場合、禁止確定期間内にクラッチペダル17の踏み込みが検出された場合には、禁止確定期間経過後においてもエンジン10の出力制限の禁止をそのまま継続する。一方、同期間内にクラッチペダル17の踏み込みが検出されなかった場合には、禁止期間経過後にエンジン10の出力制限の禁止を解除する。
【0057】
・ダブルクラッチ対応のための構成としては、クラッチペダル17の踏み込みに伴うエンジン出力制限の禁止中においてアクセルペダル31の踏み込み操作が行われないままクラッチペダル17の踏込み状態が解除されたか否かを判定する手段を備え、同手段で肯定判定された場合に、クラッチペダル17の踏み込み解除から所定期間、エンジン10の出力制限の禁止を継続する構成としてもよい。
【0058】
・上記実施形態では、変速機として手動変速機15を備える車両に適用する場合について説明したが、ドライバによるシフト装置のシフト位置に応じて変速比が自動で切り替えられる自動変速機を備える車両に適用することもできる。具体的には、当該システムは、ドライバによるシフト位置のシフトダウン側への変更操作があったことを検出するシフトダウン検出手段を備え、該シフトダウン検出手段の検出結果に基づいて、エンジン10と自動変速機との間が動力遮断状態になっていることを検出する。なお、本構成では、シフト装置及び自動変速機により、動力の遮断及び伝達を行うクラッチ手段が構成され、シフト位置を検出するシフト位置センサによりシフトダウン検出手段が構成されている。そして、シフト位置のシフトダウン側への変更があったことが検出された場合、その変更のタイミング直後の所定期間では、エンジン10と変速機との間が動力遮断状態になり、ドライバによりヒールアンドトウの操作が行われる場合があることに鑑み、エンジン10の出力制限の実施を禁止する。
【0059】
図8に、自動変速機を備える車両におけるエンジン制御の具体的態様を示すタイムチャートを示す。図中、(a)はブレーキセンサ35のON/OFF信号の推移、(b)はシフト装置のシフト位置の推移、(c)は出力制限許可フラグFbのON/OFFの推移、(d)はエンジン回転速度の推移、(e)はアクセル操作量の推移、(f)はエンジン出力制限の実施/未実施の推移を示す。
【0060】
図8において、車両走行中のタイミングt31で、ドライバによりブレーキペダル34が踏み込まれ、その後、タイミングt32で、シフト位置がシフトダウン側へ変更された場合(図8では、3速から2速に変更された場合)を考える。この場合、タイミングt32で、出力制限許可フラグFbをオンからオフに切り替えるとともに、タイミングt32から所定時間βの間、Fb=OFFのままにする。これにより、自動変速機を備える車両においてヒールアンドトウの操作が行われた場合にも、その操作中にエンジン出力制限が行われるのを回避することができる。
【符号の説明】
【0061】
10…エンジン、14…クラッチ装置(クラッチ手段)、15…手動変速機、17…クラッチペダル(クラッチ手段)、18…シフト装置、30…ECU(両踏み検出手段、出力制限手段、クラッチ検出手段、出力制限禁止手段、ブレーキ検出手段、移行検出手段、アクセル検出手段、回転量検出手段、期間設定手段、アクセル操作判定手段)、32…アクセルセンサ、35…ブレーキセンサ、36…シフト位置センサ。
【特許請求の範囲】
【請求項1】
エンジンと変速機との間の動力の伝達及び遮断を行うクラッチ手段を備える車両に適用され、
アクセルペダルが踏み込まれているアクセル踏込状態であって、かつブレーキペダルが踏み込まれているブレーキ踏込状態である両踏み状態であることを検出する両踏み検出手段と、
前記両踏み検出手段により両踏み状態であることが検出された場合にエンジンの出力を制限する出力制限処理を実施する出力制限手段と、
前記クラッチ手段が動力遮断状態になっていることを検出するクラッチ検出手段と、
前記クラッチ検出手段により前記クラッチ手段が動力遮断状態になっていることが検出された場合に前記出力制限処理の実施を禁止する出力制限禁止手段と、
を備えることを特徴とするエンジン制御装置。
【請求項2】
前記ブレーキ踏込状態であることを検出するブレーキ検出手段と、
前記クラッチ検出手段による検出結果に基づいて、前記クラッチ手段が動力伝達状態から動力遮断状態に移行したことを検出する移行検出手段と、を備え、
前記出力制限禁止手段は、前記ブレーキ検出手段により前記ブレーキ踏込状態であることが検出されている期間内において前記移行検出手段により動力遮断状態に移行したことが検出された場合に、前記出力制限処理の実施を禁止する請求項1に記載のエンジン制御装置。
【請求項3】
アクセルペダルが踏み込まれていないアクセル非踏込状態であることを検出するアクセル検出手段と、
前記クラッチ検出手段による検出結果に基づいて、前記クラッチ手段が動力伝達状態から動力遮断状態に移行したことを検出する移行検出手段と、を備え、
前記出力制限禁止手段は、前記アクセル検出手段によりアクセル非踏込状態であることが検出されている期間内において前記移行検出手段により動力遮断状態に移行したことが検出された場合に、前記出力制限処理の実施を禁止する請求項1又は2に記載のエンジン制御装置。
【請求項4】
前記クラッチ検出手段により動力遮断状態になっていることが検出された後に、アクセルペダルの踏み込みに伴うエンジン回転速度の回転上昇量を検出する回転量検出手段を備え、
前記回転量検出手段により検出した回転上昇量に基づいて、前記出力制限禁止手段による前記出力制限処理の実施の禁止を解除する請求項1乃至3のいずれか一項に記載のエンジン制御装置。
【請求項5】
前記変速機は、変速比を手動で切り替える手動変速機であり、
前記クラッチ手段は、ドライバによるクラッチペダルの踏み込み操作に応じて前記動力の伝達及び遮断を行うものであり、
前記クラッチ検出手段は、クラッチペダルが踏み込まれているクラッチ踏込み状態になっていることを検出することにより、前記クラッチ手段が動力遮断状態になっていることを検出する手段であり、
前記出力制限手段は、前記クラッチ検出手段によりクラッチ踏込み状態になっていることが検出された場合に、前記出力制限処理の実施を禁止する請求項1乃至4のいずれか一項に記載のエンジン制御装置。
【請求項6】
前記クラッチ手段が動力遮断状態になっているときの前記変速機のシフト位置の変更方向を検出するシフト方向検出手段を備え、
前記シフト方向検出手段により検出された変更方向がシフトアップ側である場合に、前記出力制限禁止手段による前記出力制限処理の実施の禁止を解除する請求項5に記載のエンジン制御装置。
【請求項7】
前記クラッチ手段が動力伝達状態から動力遮断状態に移行してからの所定期間を、前記出力制限処理の実施を禁止する禁止確定期間として設定する期間設定手段と、
前記設定手段により設定した禁止確定期間内において、アクセルペダルの踏み込み操作があったか否かを判定するアクセル操作判定手段と、を備え、
前記アクセル操作判定手段により、前記禁止確定期間内にアクセルペダルの踏み込み操作有りと判定された場合に、前記禁止確定期間の経過後において前記出力制限処理の禁止を継続し、踏み込み操作無しと判定された場合に、前記禁止確定期間が経過した後、前記出力制限処理の禁止を解除する請求項5又は6に記載のエンジン制御装置。
【請求項8】
前記変速機は、変速比を自動で切り替える自動変速機であり、
前記クラッチ手段は、ドライバによる前記変速機のシフト位置の変更操作に応じて前記動力の伝達及び遮断を行うものであり、
前記クラッチ検出手段は、前記シフト位置のシフトダウン側への変更操作があったことを検出することにより、前記クラッチ手段が動力遮断状態になっていることを検出する手段であり、
前記出力制限手段は、前記クラッチ検出手段により前記シフト位置のシフトダウン側への変更操作があったことが検出された場合に前記出力制限処理の実施を禁止する請求項1乃至4のいずれか一項に記載のエンジン制御装置。
【請求項1】
エンジンと変速機との間の動力の伝達及び遮断を行うクラッチ手段を備える車両に適用され、
アクセルペダルが踏み込まれているアクセル踏込状態であって、かつブレーキペダルが踏み込まれているブレーキ踏込状態である両踏み状態であることを検出する両踏み検出手段と、
前記両踏み検出手段により両踏み状態であることが検出された場合にエンジンの出力を制限する出力制限処理を実施する出力制限手段と、
前記クラッチ手段が動力遮断状態になっていることを検出するクラッチ検出手段と、
前記クラッチ検出手段により前記クラッチ手段が動力遮断状態になっていることが検出された場合に前記出力制限処理の実施を禁止する出力制限禁止手段と、
を備えることを特徴とするエンジン制御装置。
【請求項2】
前記ブレーキ踏込状態であることを検出するブレーキ検出手段と、
前記クラッチ検出手段による検出結果に基づいて、前記クラッチ手段が動力伝達状態から動力遮断状態に移行したことを検出する移行検出手段と、を備え、
前記出力制限禁止手段は、前記ブレーキ検出手段により前記ブレーキ踏込状態であることが検出されている期間内において前記移行検出手段により動力遮断状態に移行したことが検出された場合に、前記出力制限処理の実施を禁止する請求項1に記載のエンジン制御装置。
【請求項3】
アクセルペダルが踏み込まれていないアクセル非踏込状態であることを検出するアクセル検出手段と、
前記クラッチ検出手段による検出結果に基づいて、前記クラッチ手段が動力伝達状態から動力遮断状態に移行したことを検出する移行検出手段と、を備え、
前記出力制限禁止手段は、前記アクセル検出手段によりアクセル非踏込状態であることが検出されている期間内において前記移行検出手段により動力遮断状態に移行したことが検出された場合に、前記出力制限処理の実施を禁止する請求項1又は2に記載のエンジン制御装置。
【請求項4】
前記クラッチ検出手段により動力遮断状態になっていることが検出された後に、アクセルペダルの踏み込みに伴うエンジン回転速度の回転上昇量を検出する回転量検出手段を備え、
前記回転量検出手段により検出した回転上昇量に基づいて、前記出力制限禁止手段による前記出力制限処理の実施の禁止を解除する請求項1乃至3のいずれか一項に記載のエンジン制御装置。
【請求項5】
前記変速機は、変速比を手動で切り替える手動変速機であり、
前記クラッチ手段は、ドライバによるクラッチペダルの踏み込み操作に応じて前記動力の伝達及び遮断を行うものであり、
前記クラッチ検出手段は、クラッチペダルが踏み込まれているクラッチ踏込み状態になっていることを検出することにより、前記クラッチ手段が動力遮断状態になっていることを検出する手段であり、
前記出力制限手段は、前記クラッチ検出手段によりクラッチ踏込み状態になっていることが検出された場合に、前記出力制限処理の実施を禁止する請求項1乃至4のいずれか一項に記載のエンジン制御装置。
【請求項6】
前記クラッチ手段が動力遮断状態になっているときの前記変速機のシフト位置の変更方向を検出するシフト方向検出手段を備え、
前記シフト方向検出手段により検出された変更方向がシフトアップ側である場合に、前記出力制限禁止手段による前記出力制限処理の実施の禁止を解除する請求項5に記載のエンジン制御装置。
【請求項7】
前記クラッチ手段が動力伝達状態から動力遮断状態に移行してからの所定期間を、前記出力制限処理の実施を禁止する禁止確定期間として設定する期間設定手段と、
前記設定手段により設定した禁止確定期間内において、アクセルペダルの踏み込み操作があったか否かを判定するアクセル操作判定手段と、を備え、
前記アクセル操作判定手段により、前記禁止確定期間内にアクセルペダルの踏み込み操作有りと判定された場合に、前記禁止確定期間の経過後において前記出力制限処理の禁止を継続し、踏み込み操作無しと判定された場合に、前記禁止確定期間が経過した後、前記出力制限処理の禁止を解除する請求項5又は6に記載のエンジン制御装置。
【請求項8】
前記変速機は、変速比を自動で切り替える自動変速機であり、
前記クラッチ手段は、ドライバによる前記変速機のシフト位置の変更操作に応じて前記動力の伝達及び遮断を行うものであり、
前記クラッチ検出手段は、前記シフト位置のシフトダウン側への変更操作があったことを検出することにより、前記クラッチ手段が動力遮断状態になっていることを検出する手段であり、
前記出力制限手段は、前記クラッチ検出手段により前記シフト位置のシフトダウン側への変更操作があったことが検出された場合に前記出力制限処理の実施を禁止する請求項1乃至4のいずれか一項に記載のエンジン制御装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−241549(P2012−241549A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−109983(P2011−109983)
【出願日】平成23年5月17日(2011.5.17)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月17日(2011.5.17)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]