
エンジン制御装置
【課題】エンジン制御装置において、ローアイドル状態での油圧負荷の上昇による黒煙発生やエンジンストールを防止して、安定したローアイドル状態を維持できるようにする。
【解決手段】エンジン7に燃料を噴射する燃料噴射装置106と、エンジン回転数を検出するエンジン回転センサ108と、エンジン回転数と燃料噴射量との関係を示す出力特性マップを予め記憶させたROM102bと、マップに基づいて燃料噴射装置の作動を制御するコントローラ102とを備える。エンジンの低速回転中にエンジン負荷の増大にてエンジン回転数が低下した場合は、エンジンの低速回転域での最大燃料噴射量が増大するように、出力特性マップを一時的に補正する。マップの一時的な補正実行の可否は、油圧源から供給される作動油の油圧に基づき決定する。
【解決手段】エンジン7に燃料を噴射する燃料噴射装置106と、エンジン回転数を検出するエンジン回転センサ108と、エンジン回転数と燃料噴射量との関係を示す出力特性マップを予め記憶させたROM102bと、マップに基づいて燃料噴射装置の作動を制御するコントローラ102とを備える。エンジンの低速回転中にエンジン負荷の増大にてエンジン回転数が低下した場合は、エンジンの低速回転域での最大燃料噴射量が増大するように、出力特性マップを一時的に補正する。マップの一時的な補正実行の可否は、油圧源から供給される作動油の油圧に基づき決定する。
【発明の詳細な説明】
【技術分野】
【0001】
本願発明は、例えばバックホウのような作業機械に用いられるエンジン制御装置に関するものである。
【背景技術】
【0002】
従来から、作業機械の一例であるバックホウは一般に、アーム等の作業部に対する油圧アクチュエータに作動油を供給する油圧ポンプと、当該油圧ポンプを作動させるエンジンとを備えており、油圧ポンプからの作動油にて油圧アクチュエータを駆動させることにより、所定の仕事が実行される。また、エンジンの出力は油圧ポンプだけでなく、クローラ等の走行部にも分配して伝達される。
【0003】
この種のバックホウでは、エンジンコントローラが出力特性マップに基づいて電子ガバナ付きの燃料噴射装置の作動を制御することにより、スロットルレバー等の操作量に応じた目標エンジン回転数となり且つエンジン負荷にも対応するように燃料噴射量を調節して、エンジンの出力(エンジン回転数と出力トルク)を制御している(例えば特許文献1等参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−340152号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、1台のエンジンの出力が走行部と作業部との双方の駆動に用いられるバックホウでは、エンジンが回転数の低いローアイドル状態の場合において、省エネ、低騒音及び低振動の観点から、ローアイドル回転数(アイドリング回転数)を極力低く抑えている。
【0006】
しかし、この場合は、エンジン回転数が高速回転域にある場合に比べて、急激な油圧負荷の上昇に対するエンジンの出力トルクの上昇が鈍くなる。このため、例えば運搬用トラックからのバックホウの積み降ろしに際して、ローアイドル状態でバケットを地面に押し付けると、油圧ポンプの負荷が急激に上昇するものの、エンジンの出力トルクの応答が追従できず、油圧ポンプの負荷に対してエンジンの出力トルクが不足する。その結果、黒煙を排出してノッキングを生じたりエンジンストールを引き起こしたりするという問題があった。
【0007】
そこで、本願発明は、ローアイドル状態での油圧負荷の上昇による黒煙発生やエンジンストールを防止して、安定したローアイドル状態を維持できるようにすることを技術的課題とするものである。
【課題を解決するための手段】
【0008】
請求項1の発明は、エンジンと、前記エンジンに燃料を噴射する燃料噴射装置と、エンジン回転数を検出する回転数検出手段と、エンジン回転数と燃料噴射量との関係を示す制御パターンを予め記憶させた記憶手段と、前記制御パターンに基づいて前記燃料噴射装置の作動を制御する制御手段とを備えているエンジン制御装置において、前記エンジンの低速回転中にエンジン負荷の増大にてエンジン回転数が低下した場合は、前記エンジンの低速回転域での最大燃料噴射量が増大するように、前記制御パターンを一時的に補正して、前記補正した制御パターンに基づき燃料噴射量を制御する補正噴射制御を実行する構成であって、前記制御パターンの一時的な補正実行の可否を、前記エンジンの動力にて駆動する油圧源から供給される作動油の油圧に基づき決定するというものである。
【0009】
請求項2の発明は、請求項1に記載のエンジン装置において、前記油圧源からの作動油の油圧変化率が予め設定した設定油圧率以上である場合に、前記制御パターンの一時的な補正を許可するというものである。
【0010】
請求項3の発明は、請求項2に記載のエンジン装置において、前記エンジンの始動後に前記補正噴射制御を1回以上実行した場合において、前記エンジンの負荷を検出する負荷検出手段から得られるエンジンの負荷率が規定値以上のときは、前記制御パターンの一時的な補正を行わず前記補正噴射制御を実行しないというものである。
【0011】
請求項4の発明は、請求項2に記載のエンジン装置において、前記エンジンの始動後に前記補正噴射制御を1回以上実行した場合において、前記エンジン回転数の前記目標値が補正前の値から変化しないときは、前記制御パターンの一時的な補正を行わず前記補正噴射制御を実行しないというものである。
【0012】
請求項5の発明は、請求項2に記載のエンジン装置において、前記エンジンの始動後に前記補正噴射制御を1回以上実行した場合において、前記エンジンの前記負荷率が補正前の値から変化しないときは、前記制御パターンの一時的な補正を行わず前記補正噴射制御を実行しないというものである。
【発明の効果】
【0013】
本願発明によると、エンジンの低速回転中にエンジン負荷の増大にてエンジン回転数が低下した場合は、前記エンジンの低速回転域での最大燃料噴射量が増大するように、エンジン回転数と燃料噴射量との関係を示す制御パターンを一時的に補正するという構成になっているから、前記エンジンの低速回転中に、例えば油圧等に起因して前記エンジンに掛かる負荷が増大しても、最大燃料噴射量を一時的に引き上げて、前記エンジンの出力トルクを増大できる。従って、トルク不足に起因するエンジン回転数の低下をなくして、黒煙及びノッキングの発生を防止できると共に、エンジンストールのおそれを抑制できるという効果を奏する。
【0014】
また、例えば油圧等に起因した負荷増大の検出タイミングを、前記油圧源からの作動油の油圧に基づき把握できるから、エンジン回転数を基準にして検出タイミングを計る場合よりも素早い判別が可能になり、前記制御パターンの一時的な補正の実行に要する時間を短縮できるという効果を奏する。
【図面の簡単な説明】
【0015】
【図1】バックホウの側面図である。
【図2】キャビン内の平面図である。
【図3】バックホウの油圧系統図である。
【図4】制御手段の機能ブロック図である。
【図5】エンジン回転数とラック位置との関係を示す出力特性マップの説明図である。
【図6】第1実施例の補正噴射制御のフローチャートである。
【図7】第2実施例の補正噴射制御のフローチャートである。
【図8】第3実施例の補正噴射制御のフローチャートである。
【図9】第4実施例の補正噴射制御のフローチャートである。
【発明を実施するための形態】
【0016】
以下に、本願発明を具体化した実施形態を、作業機械としてのバックホウに適用した図面(図1〜図9)に基づいて説明する。
【0017】
(1).バックホウの概要
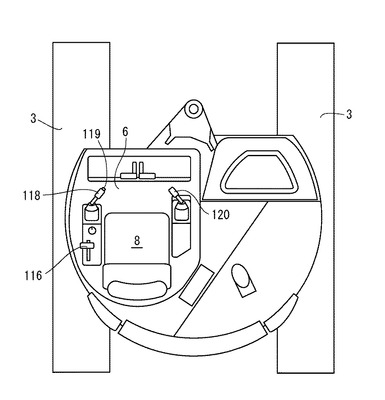
まず始めに、主に図1及び図2を参照しながら、バックホウ1の概要について説明する。なお、図2では説明の便宜上、キャビン6の図示を省略している。
【0018】
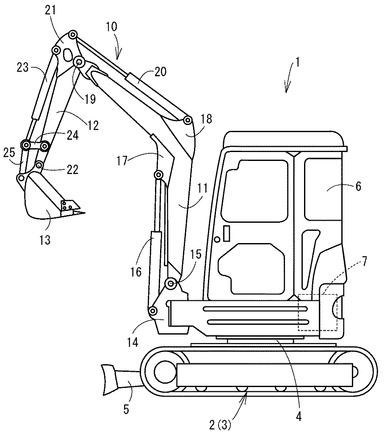
作業機械の一例であるバックホウ1は、左右一対の走行クローラ3(図1では左側のみ示す)を有するクローラ式の走行装置2と、走行装置2上に設けられた旋回台4(機体)とを備えている。旋回台4は、旋回モータ9(図2参照)にて、360°の全方位にわたって水平旋回可能に構成されている。走行装置2の前部には排土板5が昇降回動可能に装着されている。
【0019】
旋回台4には、操縦部としてのキャビン6とディーゼルタイプのエンジン7とが搭載されている。旋回台4の前部には、掘削作業のためのブーム11、アーム12及びバケット13を有する作業部10が設けられている。図2に詳細に示すように、キャビン6の内部には、オペレータが着座する操縦座席8、エンジン7の出力回転数を設定保持するスロットル操作手段としてのスロットルレバー116、並びに、作業部操作手段としてのレバー・スイッチ群117〜120(旋回操作レバー117、アーム操作レバー118、バケット操作スイッチ119及びブーム操作レバー120)等が配置されている。
【0020】
作業部10の構成要素であるブーム11は、先端側を前向きに突き出して側面視く字状に屈曲した形状に形成されている。ブーム11の基端部は、旋回台4の前部に取り付けられたブームブラケット14に、横向きのブーム軸15を中心にして首振り回動可能に枢着されている。ブーム11の内面(前面)側には、これを上下に首振り回動させるための片ロッド複動形のブームシリンダ16が配置されている。ブームシリンダ16のシリンダ側端部は、ブームブラケット14の前端部に回動可能に枢支されている。ブームシリンダ16のロッド側端部は、ブーム11における屈曲部の前面側(凹み側)に固定された前ブラケット17に回動可能に枢支されている。ブームシリンダ16は油圧アクチュエータに相当する。
【0021】
ブーム11の先端部には、長手角筒状のアーム12の基端部が、横向きのアーム軸19を中心にして首振り回動可能に枢着されている。ブーム11の上面前部側には、アーム12を首振り回動させるための片ロッド複動形のアームシリンダ20が配置されている。アームシリンダ20のシリンダ側端部は、ブーム11における屈曲部の背面側(突出側)に固定された後ブラケット18に回動可能に枢支されている。アームシリンダ20のロッド側端部は、アーム12の基端側外面(前面)に固着されたアームブラケット21に回動可能に枢支されている。
【0022】
アーム12の先端部には、掘削用アタッチメントとしてのバケット13が、横向きのバケット軸22を中心にして掬い込み回動可能に枢着されている。アーム12の外面(前面)側には、バケット13を掬い込み回動させるための片ロッド複動形のバケットシリンダ23が配置されている。バケットシリンダ23のシリンダ側端部は、アームブラケット21に回動可能に枢支されている。バケットシリンダ23のロッド側端部は、連結リンク24及び中継ロッド25を介してバケット13に回動可能に枢支されている。旋回モータ9、アームシリンダ20及びバケットシリンダ23も、油圧アクチュエータに相当する。
【0023】
(2).バックホウの油圧系統
次に、図3を参照しながら、バックホウ1の油圧系統30構造について説明する。
【0024】
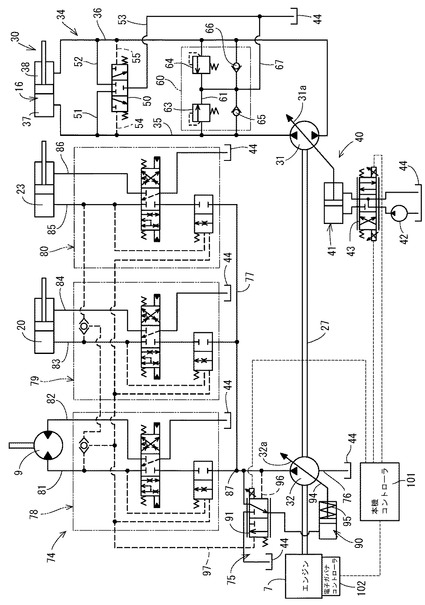
図3に示すバックホウ1の油圧系統30は、油圧源としての可変容量形の油圧ポンプモータ31及び可変容量形の油圧ポンプ32を備えている。これらポンプ31,32群にはエンジン7から突出した出力軸27が貫通していて、ポンプ31,32群は、出力軸27の回転にて駆動するように構成されている。すなわち、ポンプ31,32群を駆動させる回転軸(出力軸27)は共通する1本の軸になっている。
【0025】
油圧ポンプモータ31は、比較的大きな駆動力が必要なブームシリンダ16に作動油を供給するためのものである。油圧ポンプ32は、旋回モータ9、アームシリンダ20及びバケットシリンダ23に作動油を供給するためのものである。
【0026】
(2−1).閉ループ油圧回路の構造
まず、ブームシリンダ16を駆動させる閉ループ油圧回路34について説明する。閉ループ油圧回路34は、前述した片ロッド複動形のブームシリンダ16と、斜板式のアキシャルピストンポンプモータである油圧ポンプモータ31とを備えている。ブームシリンダ16と油圧ポンプモータ31とは、ボトム側油路35及びロッド側油路36にて閉ループ状に接続されている。この場合、ブームシリンダ16のボトム油室37がボトム側油路35を介して油圧ポンプモータ31に接続され、ブームシリンダ16のロッド油室38がロッド側油路36を介して油圧ポンプモータ31に接続されている。
【0027】
このため、油圧ポンプモータ31には、ブームシリンダ16からの作動油がボトム側又はロッド側油路35,36を経由して供給され、その結果、油圧ポンプモータ31がモータとしての作用を発揮し、共通の出力軸27上にある油圧ポンプ32の駆動を一部又は全部負担することになる。すなわち、油圧ポンプモータ31のモータ的な動作によって、油圧ポンプ32の駆動負荷が軽減されるから、エンジン全体としての仕事量を軽減でき、燃費改善に効果を発揮する。
【0028】
閉ループ油圧回路34は、油圧ポンプモータ31における可動斜板31aの傾斜角度(斜板角度)を制御する油圧サーボ機構40を備えている。油圧サーボ機構40は、可動斜板31aの傾斜角度を変更させる片ロッド形の複動調整シリンダ41と、調整シリンダ41に作動油を供給する調整ポンプ42と、調整ポンプ42からの作動油の供給方向及び供給量を調節するための4ポート3位置切換形の電磁サーボ弁43とを有している。
【0029】
電磁サーボ弁43の入口ポートは調整ポンプ42を介して作動油タンク44に接続され、出口ポートは直接作動油タンク44に接続されている。電磁サーボ弁43のボトム側ポートは、複動調整シリンダ41のボトム油室45に接続され、ロッド側ポートは複動調整シリンダ41のロッド油室46に接続されている。複動調整シリンダ41におけるピストンロッド47の先端は、油圧ポンプモータ31の可動斜板31aに連動連結されている。
【0030】
電磁サーボ弁43は、キャビン6内に配置されたブーム操作レバー120の操作量に対応した電磁ソレノイドの励磁によって、中立状態と、複動調整シリンダ41のボトム油室45への作動油供給状態と、複動調整シリンダ41のロッド油室46への作動油供給状態とに切換駆動するように構成されている。
【0031】
ブーム操作レバー120の操作にて電磁サーボ弁43を切換駆動させると、複動調整シリンダ41が伸縮動して、油圧ポンプモータ31における可動斜板31aの傾斜角度が変更・調節され、油圧ポンプモータ31からブームシリンダ16への作動油の供給方向及び供給量が調節される。その結果、ブームシリンダ16の伸縮方向及び伸縮量が無段階に変更されて、ブーム11が上下に首振り回動することになる。
【0032】
ボトム側油路35とロッド側油路36との間には、3ポート3位置切換形の方向切換弁50が配置されている。方向切換弁50は、ブームシリンダ16における両油室37,38の受圧面積差等に起因して、一方の油室37から流出する作動油量が他方の油室38に流入する作動油量より多い場合の余剰分を排出するためのものである。
【0033】
方向切換弁50における一方の入口ポートは、第1入口油路51を介してボトム側油路35に接続され、他方の入口ポートは、第2入口油路52を介してロッド側油路36に接続されている。方向切換弁50の出口ポートはドレイン油路53を介して作動油タンク44に接続されている。
【0034】
また、方向切換弁50は、ボトム側パイロット油路54を介してボトム側油路35に接続されている一方、ロッド側パイロット油路55を介してロッド側油路36に接続されている。このため、ボトム側パイロット油路54の圧力は、ボトム側油路35の圧力、ひいてはブームシリンダ16におけるボトム油室37の圧力と略同じになっている。そして、ロッド側パイロット油路55の圧力は、ロッド側油路36の圧力、ひいてはブームシリンダ16におけるロッド油室38の圧力と略同じになっている。
【0035】
方向切換弁50は、両パイロット油路54,55の圧力差に応じて、中立状態と、ボトム側油路35からドレイン油路53への作動油排出状態と、ロッド側油路36からドレイン油路53への作動油排出状態とに切換駆動するように構成されている。当該方向切換弁50の作用にて、ボトム側及びロッド側油路35,36間を流通する作動油量の不均衡が是正され、ブームシリンダ16がスムーズに伸縮動することになる。
【0036】
ボトム側油路35とロッド側油路36との間には、2つのリリーフ弁63,64と2つの逆止弁65,66とを有するチャージリリーフ回路60が配置されている。チャージリリーフ回路60は基本的に、一方の油路35(36)内の圧力が高くなり過ぎると、作動油をブームシリンダ16における一方の油室37(38)に供給せずに、他方の油路36(35)や作動油タンク44に逃がして、閉ループ油圧回路34の過負荷を防止するように構成されている。閉ループ油圧回路34中の作動油量が少ない場合は、油圧ポンプモータ31の自吸力にて、作動油タンク44からチャージリリーフ回路60を介して不足分の作動油が補給される。
【0037】
実施形態では、ボトム側油路35とロッド側油路36とに、一対のバイパス油路61,62が並列状に接続されている。シリンダ側バイパス油路61中には、ボトム側油路35内の圧力を逃がすための第1リリーフ弁63と、ロッド側油路36内の圧力を逃がすための第2リリーフ弁64とが設けられている。ポンプ側バイパス油路62中には、ボトム側油路35の方向にのみ開く第1逆止弁65と、ロッド側油路36の方向にのみ開く第2逆止弁66とが設けられている。
【0038】
シリンダ側バイパス油路61における両リリーフ弁64,65の間と、ポンプ側バイパス油路62における両逆止弁66,67の間とは、排出油路67にてつながっている。排出油路67の先端は、ドレイン油路53の中途部に接続されている。従って、排出油路67はドレイン油路53を介して作動油タンク44に連通している。
【0039】
(2−2).チャージ油圧回路の構造
次に、旋回モータ9、アームシリンダ20及びバケットシリンダ23を駆動させるチャージ油圧回路74について説明する。チャージ油圧回路74は、前述した旋回モータ9と、片ロッド複動形のアームシリンダ20と、片ロッド複動形のバケットシリンダ23と、斜板式のアキシャルピストンポンプである油圧ポンプ32と、油圧調整機構75とを備えている。
【0040】
油圧ポンプ32の吸入側は吸入油路76を介して作動油タンク44に連通している。油圧ポンプ32の吐出側から延びるチャージ油路77には、それぞれ対応する流量制御弁ユニット78,79,80を介して、旋回モータ9とアームシリンダ20とバケットシリンダ23とが分岐接続されている。
【0041】
旋回用の流量制御弁ユニット78は、キャビン6内に配置された旋回操作レバー117の操作量に応じて、中立状態と、旋回モータ9に対する一方のモータ油路81への作動油供給状態と、他方のモータ油路82への作動油供給状態とに切換駆動するように構成されている。旋回操作レバー117の操作にて旋回用の流量制御弁ユニット78を切換駆動させると、油圧ポンプ32から旋回モータ9への作動油の供給方向及び供給量が調節される。その結果、旋回モータ9の回転方向及び回転量が無段階に変更されて、旋回台4が水平旋回することになる。
【0042】
アーム用の流量制御弁ユニット79は、キャビン6内に配置されたアーム操作レバー118の操作量に応じて、中立状態と、アームシリンダ20に対するボトム側油路83への作動油供給状態と、ロッド側油路84への作動油供給状態とに切換駆動するように構成されている。アーム操作レバー118の操作にてアーム用の流量制御弁ユニット79を切換駆動させると、油圧ポンプ32からアームシリンダ20への作動油の供給方向及び供給量が調節される。その結果、アームシリンダ20の伸縮方向及び伸縮量が無段階に変更されて、アーム12が上下に首振り回動することになる。
【0043】
バケット用の流量制御弁ユニット80は、スライド式のバケット操作スイッチ119の操作量に応じて、中立状態と、バケットシリンダ23に対するボトム側油路85への作動油供給状態と、ロッド側油路86への作動油供給状態とに切換駆動するように構成されている。バケット操作スイッチ119の操作にてバケット用の流量制御弁ユニット80を切換駆動させると、油圧ポンプ32からバケットシリンダ23への作動油の供給方向及び供給量が調節される。その結果、バケットシリンダ23の伸縮方向及び伸縮量が無段階に変更されて、アーム12の先端部にあるバケット13が、横向きのバケット軸22回りに掬い込み回動することになる。
【0044】
油圧調整機構75は、油圧ポンプ32における可動斜板32aの傾斜角度を制御するためのものであり、可動斜板32aの傾斜角度を変更させる片ロッド形の単動調整シリンダ90と、油圧ポンプ32から単動調整シリンダ90への作動油の供給方向及び供給量を調節するための3ポート2位置切換形のチャージ用電磁サーボ弁91とを備えている。
【0045】
チャージ用電磁サーボ弁91の油路側第1ポートは、チャージ油路77のうち油圧ポンプ32と各流量制御弁ユニット78〜80への分岐部87との間に接続され、油路側第2ポートは直接作動油タンク44に接続されている。チャージ用電磁サーボ弁91のシリンダ側ポートは単動調整シリンダ90のボトム油室に接続されている。単動調整シリンダ90のロッド室には、ピストンロッド94を短縮動させる方向に付勢する戻しバネ95が内装されている。単動調整シリンダ90におけるピストンロッド94の先端は、油圧ポンプ32の可動斜板32aに連動連結されている。
【0046】
チャージ用電磁サーボ弁91は、第1パイロット油路96を介して、チャージ油路77のうち油圧ポンプ32と分岐部87との間に接続されている一方、第2パイロット油路97を介して各流量制御弁ユニット78〜80に接続されている。このため、第1パイロット油路96の圧力は油圧ポンプ32の吐出側の圧力と略同じになっている。そして、第2パイロット油路97の圧力は、旋回モータ9、アームシリンダ20及びバケットシリンダ23における吸入側の圧力のうち最も高圧なものと略同じになっている。
【0047】
この場合、チャージ用電磁サーボ弁91は基本的に、第1及び第2パイロット油路96,97の圧力差に応じて、単動調整シリンダ90のボトム油室への作動油供給状態と、ボトム油室からの作動油排出状態とに切換駆動するように構成されている。
【0048】
第1及び第2パイロット油路96,97の圧力差が予め設定された所定範囲から外れて、チャージ用電磁サーボ弁91が切換駆動すると、単動調整シリンダ90が伸縮動して、油圧ポンプ32における可動斜板32aの傾斜角度が変更・調節され、油圧ポンプ32から各油圧アクチュエータ(この場合は旋回モータ9、アームシリンダ20及びバケットシリンダ23)への作動油の供給方向及び供給量が調節される。
【0049】
その結果、油圧ポンプ32の吐出側の圧力と各油圧アクチュエータ9,20,23の吸入側の圧力との差が所定範囲内に調整され、各油圧アクチュエータ9,20,23に掛かる負荷の大小に拘らず、各油圧アクチュエータ9,20,23に供給される作動油量が略一定に保持されることになる。すなわち、各油圧アクチュエータ9,20,23の作動速度を略一定に保持するロードセンシング機能が働くことになる。
【0050】
(3).燃料噴射制御を実行するための構成
次に、図4及び図5を参照しながら、バックホウ1の燃料噴射制御を実行するための構成について説明する。
【0051】
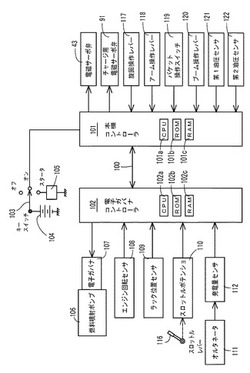
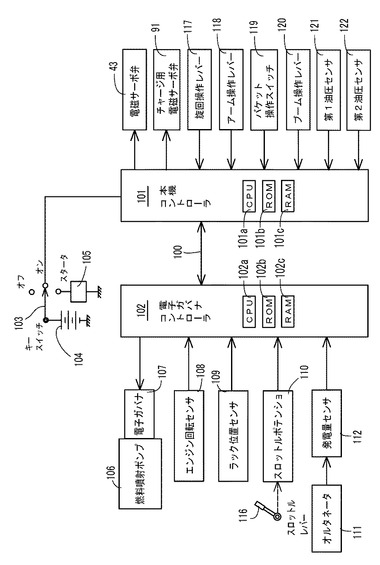
バックホウ1には、制御手段としての本機コントローラ101及び電子ガバナコントローラ102が搭載されている。これらコントローラ101,102は、バックホウ1の作動全般を制御すると共に、後述する燃料噴射制御等を実行するためのものであり、各種演算処理や制御を実行するCPU101a,102aの他、制御プログラムやデータを記憶させる記憶手段としてのROM101b,102b、制御プログラムやデータを一時的に記憶させるためのRAM101c,102c、及び入出力インターフェイス等を備えている。メインコントローラ101と電子ガバナコントローラ102とは、互いにCAN通信バス100を介して電気的に接続されている。
【0052】
本機コントローラ101は、電源印加用のキースイッチ103を介してバッテリ104に接続されている。キースイッチ103は、エンジン7を始動させるためのスタータ105にも接続されている。また、本機コントローラ101には、出力関連の機器として、調整ポンプ42からの作動油の供給方向及び供給量を調節するための電磁サーボ弁43と、油圧ポンプ32からの作動油の供給方向及び供給量を調節するためのチャージ用電磁サーボ弁91とが接続されている。更に、本機コントローラ101には、入力関連の機器として、キャビン6内に配置されたレバー・スイッチ群117〜120(旋回操作レバー117、アーム操作レバー118、バケット操作スイッチ119及びブーム操作レバー120)、閉ループ油圧回路34側の油圧ポンプモータ31から供給される作動油の油圧を検出する油圧検出手段としての第1油圧センサ121、並びに、チャージ油圧回路74側の油圧ポンプ32から供給される作動油の油圧を検出する油圧検出手段としての第2油圧センサ122等が接続されている。
【0053】
電子ガバナコントローラ102には、燃料噴射装置である燃料噴射ポンプ106に設けられた電子ガバナ107と、エンジン回転数を検出する回転数検出手段としてのエンジン回転センサ108と、燃料噴射ポンプ106のラック位置から燃料噴射量を検出する負荷検出手段としてのラック位置センサ109と、スロットルレバー116の操作位置を検出するスロットルポテンショ110と、エンジン7の動力にて発電する発電機としてのオルタネータ111の発電量を検出する発電量検出手段としての発電量センサ112とが接続されている。電子ガバナ107は、燃料噴射ポンプ106のラック位置を調節するためのラックアクチュエータ(図示省略)を有している。
【0054】
電子ガバナコントローラ102のROM102bには、エンジン回転数Nとラック位置R(燃料噴射量)との関係を示す制御パターンとしての出力特性マップMP(図5参照)が予め記憶されている。この種の出力特性マップMPは実験等にて求められる。なお、制御パターンとしては、実施形態のようなマップ形式に限らず、例えば関数表形式のものでもよい。
【0055】
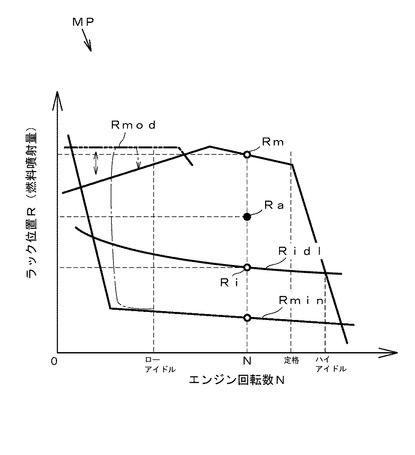
図5に示す出力特性マップMPでは、エンジン回転数Nを横軸に採り、ラック位置R(燃料噴射量)を縦軸に採っている。当該出力特性マップにおいて、上向き凸湾曲状に描かれた実線Rmaxは各エンジン回転数Nに対する最大ラック位置を表した最大ラック位置線である。略L字状に描かれた実線Rminは、各エンジン回転数Nに対する最小ラック位置を表した最小ラック位置線であり、このときの燃料噴射量は0(零)になっている。最大ラック位置線Rmaxと最小ラック位置線Rminとの間に描かれた湾曲状の実線Ridlは、各エンジン回転数Nに対する無負荷ラック位置を表した無負荷ラック位置線である。更に、低速回転域(エンジン回転数Nが低速な図5左側の領域)に描かれた二点鎖線Rmodは、低速回転域での最大ラック位置を一時的に引き上げるための補正ラック位置線である。
【0056】
電子ガバナコントローラ102は主として、エンジン回転センサ108にて検出されるエンジン回転数Nの実測値Ni、スロットルポテンショ110にて検出されるエンジン回転数Nの目標値Ns、及び、ラック位置センサ109にて検出される燃料噴射量(ラック位置R)の実測値Raから、出力特性マップMPを用いて燃料噴射量の目標値Rsを演算し、当該演算結果に応じてラックアクチュエータを駆動させるという燃料噴射制御を実行するように構成されている。
【0057】
(4).燃料噴射制御の説明
次に、図6〜図9に示すフローチャートを参照しながら、燃料噴射制御の一例について説明する。
【0058】
実施形態の電子ガバナコントローラ102は、燃料噴射制御の一例として、エンジン7の低速回転中にエンジン負荷の増大に起因してエンジン回転数Nが低下した場合に、低速回転域での最大燃料噴射量(最大ラック位置)が増大するように、出力特性マップMPを一時的に補正し、補正された出力特性マップMPに基づいて燃料噴射ポンプ106の作動を制御する補正噴射制御を実行するように構成されている。この補正噴射制御は、通常の燃料噴射制御の実行中に割り込み処理される。
【0059】
図6のフローチャートを参照しながら、補正噴射制御の第1実施例の流れを説明する。ここで、エンジン回転数Nの目標値Nsはスロットルレバー116にて予め設定され、後述するエンジン回転数Nの単位時間当りの設定低下率D0、設定負荷率Z0及び設定時間T0は、電子ガバナコントローラ102のROM102b等に記憶させる等して予め設定されているものとする。また、後述する補正実行フラグFは、エンジン7の始動時(電子ガバナコントローラ102の起動時)にリセット状態(F=0)に設定されているものとする。
【0060】
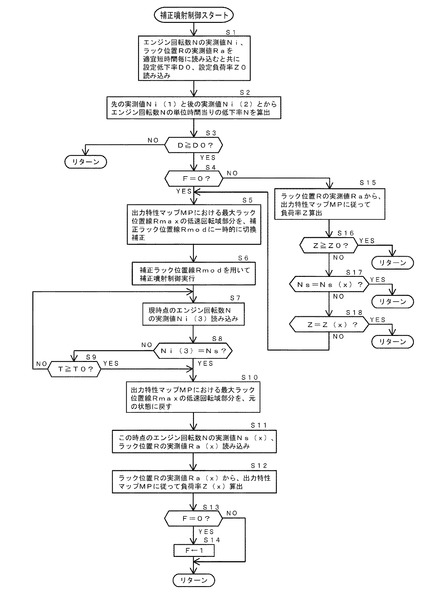
第1実施例の補正噴射制御では、まず、エンジン回転センサ108にて検出されたエンジン回転数Nの実測値Niと、当該実測値Niに対応した燃料噴射量(ラック位置R)の実測値Raとを適宜短時間毎に読み込むと共に、エンジン回転数Nの目標値Nsと、エンジン回転数Nの単位時間当りの設定低下率D0と、設定負荷率Z0とを読み込む(ステップS1)。
【0061】
次いで、先に読み込まれた実測値Ni(1)と、後に読み込まれた実測値Ni(2)とから、エンジン回転数Nの単位時間当りの低下率Dを算出する(ステップS2)。ここで、低下率Dとは、先の実測値Ni(1)と後の実測値Ni(2)との差を先の実測値Ni(1)で割った値の百分率で表したものである。すなわち、D={(Ni(1)−Ni(2)}/Ni(1)×100と表される。
【0062】
次いで、ステップS2にて算出された低下率Dが設定低下率D0(所定値)以上であるか否かを判別する(ステップS3)。低下率Dが設定低下率D0以上の場合とは、エンジン7の低速回転中に、油圧ポンプモータ31や油圧ポンプ32の負荷が急激に上昇してエンジン7に掛かる負荷が増大する結果、エンジン回転数Nが低下した場合を意味している。この状態では、油圧ポンプモータ31や油圧ポンプ32の負荷増大に対してエンジン7の出力トルクが追従できずに不足し、黒煙を排出してノッキングを生じたりエンジンストールを引き起こしたりすることになる。
【0063】
先の実測値Ni(1)と後の実測値Ni(2)との差がさほど大きくなくても、低下率Dの分母となる先の実測値Ni(1)が例えばローアイドル回転数程度の小さい値であれば、低下率Dは大きい値となる。このため、エンジン回転数Nの単位時間当りの低下率Dだけで、エンジン7が低速回転中であり且つエンジン回転数Nが低下したことを判別できる。
【0064】
そこで、ステップS2にて算出された低下率Dが設定低下率D0未満であれば(S3:NO)、エンジン7の出力トルクが不足する事態は生じないので、そのまま補正噴射制御ルーチンを抜けて(リターンして)、通常の燃料噴射制御に戻る。一方、ステップS2にて算出された低下率Dが設定低下率D0以上であれば(S3:YES)、このままではエンジン7の出力トルクが不足するので、次いで、補正実行フラグFがリセット状態(F=0)であるか否かを判別する(ステップS4)。
【0065】
補正実行フラグFは、エンジン7の始動後において、これまで補正噴射制御を実行したか否かを判別するためのフラグである。補正実行フラグFがセット状態(F=1)であれば(S4:NO)、エンジン7の始動後において少なくとも1回は補正噴射制御を実行したことがあるから、後述するステップS15へ移行する。
【0066】
補正実行フラグFがリセット状態(F=0)であれば(S4:YES)、エンジン7の始動後において一度も補正噴射制御を実行していないから、次いで、エンジン7の低速回転域での最大燃料噴射量が増大するように、出力特性マップMPの最大ラック位置線Rmaxのうちエンジン7の低速回転域に当る部分を、これより上方に位置する補正ラック位置線Rmodに一時的に切り換える補正を実行する(ステップS5)。
【0067】
そして、低速回転域での最大ラック位置を一時的に引き上げた補正ラック位置線Rmodを用いて、燃料噴射量(ラック位置R)の目標値Rsを演算し、当該演算結果に応じてラックアクチュエータを駆動させるという補正噴射制御を実行する(ステップS6)。
【0068】
次いで、現時点におけるエンジン回転数Nの実測値Ni(3)をエンジン回転センサにて検出して読み込み(ステップS7)、当該実測値Ni(3)がステップS1にて読み込まれたエンジン回転数Nの目標値Nsにまで復帰したか否かを判別する(ステップS8)。エンジン回転数Nの実測値Ni(3)が目標値Nsにまで復帰していれば(S8:YES)、例えば補正ラック位置線Rmodを下向きに徐々(段階的)に平行移動させ、最終的には、最大ラック位置線Rmaxにおける低速回転域の状態を補正前の元の状態に戻す(ステップS10)。
【0069】
エンジン回転数Nの実測値Ni(3)が目標値Nsにまで復帰していなければ(S8:NO)、次いで、ステップS6での補正噴射制御の実行からの時間Tが設定時間T0を経過したか否かを判別する(ステップS9)。第1実施例の設定時間T0は例えば1〜3秒に設定されている。設定時間T0を経過していれば(S9:YES)、ステップS10へ移行して、最大ラック位置線Rmaxにおける低速回転域の状態を補正前の元の状態に戻す。設定時間T0を経過していなければ(S9:NO)、ステップS7に戻る。
【0070】
補正噴射制御は低速回転域での最大ラック位置を強制的に上昇させるので、補正噴射制御を長時間続けると、エンジン7に掛かる負担が大変大きい。そこで、第1実施例では、ステップS7〜S9の工程を経ることにより、補正噴射制御の実行時間をできるだけ短くして、エンジン7に負担が掛かる時間を短時間に制限し、エンジン7の保護を図っている。
【0071】
ステップS10において、最大ラック位置線Rmaxにおける低速回転域の状態を補正前の元の状態に戻した後は、この時点におけるエンジン回転数Nの目標値Ns(x)と、ラック位置Rの実測値Ra(x)とを読み込み(ステップS11)、ラック位置Rの実測値Ra(x)から、出力特性マップMPに従ってエンジン7の負荷率Z(x)を算出して、電子ガバナコントローラ102のRAM102c等に記憶させる(ステップS12)。エンジン回転数Nの目標値Ns(x)と負荷率Z(x)とは、後述するステップS15以降での判別基準として用いられるものである。
【0072】
ここで、エンジン7の負荷率Z(Z(x)も同じ)とは、任意のエンジン回転数Nにおいて、無負荷ラック位置線Ridl上の点Ri〜最大ラック位置線Rmax上の点Rm間の幅を100%とし、これに対する無負荷ラック位置線Ridl上の点Ri〜ラック位置Rの実測値Ra間の幅の割合を表したものである。すなわち、Z=(Ra−Ri)/(Rm−Ri)×100と表される。
【0073】
ステップS12の実行後は、補正実行フラグFがリセット状態か否かを判別する(ステップS13)。補正実行フラグFがリセット状態であれば(S13:YES)、セット状態に変更してから(ステップS14)、補正噴射制御ルーチンを抜けて通常の燃料噴射制御に戻る。セット状態であれば(S13:NO)、そのまま補正噴射制御ルーチンを抜けて通常の燃料噴射制御に戻る。
【0074】
さて、前述の通り、ステップS4において、エンジン7の始動後において少なくとも1回は補正噴射制御を実行したことがあれば(S4:NO)、ステップS15へ移行する。ステップS15では、ステップS1にて先に読み込まれたラック位置Rの実測値Ra(1)から、出力特性マップMPに従ってエンジン7の負荷率Zを算出する。
【0075】
次いで、ステップS15にて算出された負荷率Zが設定負荷率Z0(規定値)以上であるか否かを判別する(ステップS16)。負荷率Zが設定負荷率Z0以上の場合とは、エンジン7の出力トルクより大きな負荷(例えば油圧に起因する負荷)がエンジン7に継続的に作用している可能性のある場合を意味している。このままでは、補正噴射制御が繰り返し行われることになるため、エンジン7に掛かる負担が大変大きく、エンジン7故障の原因になりかねない。
【0076】
そこで、ステップS15にて算出された負荷率Zが設定負荷率Z0以上であれば(S16:YES)、補正噴射制御の反復実行を防止するために、そのまま補正噴射制御ルーチンを抜けて、通常の燃料噴射制御に戻る。一方、ステップS15にて算出された負荷率Zが設定負荷率未満であれば(S16:NO)、次いで、ステップS1にて読み込まれたエンジン回転数Nの目標値Nsと、前回行われた補正噴射制御のステップS12にてRAM102cに記憶させたエンジン回転数Nの目標値Ns(x)とが同じか否かを判別する(ステップS17)。
【0077】
目標値Nsと前回記憶させた目標値Ns(x)とが同じであれば(S17:YES)、ステップS16YESの場合と同様に、エンジン7の出力トルクより大きな負荷がエンジン7に継続的に作用しているという可能性があるため、そのまま補正噴射制御ルーチンを抜けて、通常の燃料噴射制御に戻る。目標値Nsと前回記憶させた目標値Ns(x)とが異なっていれば(S17:NO)、次いで、ステップS15にて算出された負荷率Zと、前回行われた補正噴射制御のステップS12にてRAM102cに記憶させたエンジン7の負荷率Z(x)とが同じか否かを判別する(ステップS18)。
【0078】
負荷率Zと前回記憶させた負荷率Z(x)とが同じであれば(S18:YES)、ステップS16YES,S17YESの場合と同様に、エンジン7の出力トルクより大きな負荷がエンジン7に継続的に作用しているという可能性があるため、そのまま補正噴射制御ルーチンを抜けて、通常の燃料噴射制御に戻る。負荷率Zと前回記憶させた負荷率Z(x)とが異なっていれば(S18:NO)、前述したステップS5へ移行して、最大ラック位置線Rmaxの低速回転域に当る部分を補正ラック位置線Rmodに一時的に切り換える補正を実行するのである。
【0079】
上記の説明から分かるように、第1実施例では、エンジン7の始動後において少なくとも1回は補正噴射制御を実行したことがあれば、ステップS15〜S18の工程を経ることによって、補正噴射制御の反復実行を防止し、エンジン7の保護を図っている。
【0080】
以上の構成によると、エンジン7の低速回転中にエンジン負荷の増大にてエンジン回転数Nが低下した場合は、エンジン7の低速回転域での最大燃料噴射量が増大するように、出力特性マップMPを一時的に補正するものであるから(ステップS5参照)、エンジン7の低速回転中に、例えば油圧等に起因してエンジン7に掛かる負荷が増大しても、最大燃料噴射量(最大ラック位置)を一時的に引き上げて、エンジン7の出力トルクを増大できる。従って、トルク不足に起因するエンジン回転数Nの低下をなくして、黒煙及びノッキングの発生を防止できると共に、エンジンストールのおそれを抑制できる。
【0081】
また、エンジン回転数Nの低下率Dが設定低下率D0(所定値)以上であると、出力特性マップMPの一時的な補正を実行するものであるから(ステップS3〜S5参照)、走行装置2の加速によるエンジン7負荷の増大を例えば油圧等に起因した負荷増大であると誤認することを防止できる。また、掘削等の作業時に、出力特性マップMPの最大ラック位置線Rmaxに沿ってエンジン回転数Nが低下したとしても、かかる回転数低下を例えば油圧等に起因した負荷増大であると誤認するおそれもなくなる。従って、補正噴射制御(出力特性マップMPの一時的な補正)を適切に実行できる。
【0082】
更に、出力特性マップMPを一時的に補正した後は、設定時間T0が経過すると出力特性マップMPを元の状態に戻すように構成されているから(ステップS9参照)、補正噴射制御の実行時間を短くして、エンジン7に負担が掛かる時間を制限でき、エンジン7の保護に寄与している。特に第1実施例では、出力特性マップMPを一時的に補正した後に、設定時間T0の経過とエンジン回転数Nの目標値Nsへの復帰とのうちいずれかが先に成立すると、出力特性マップMPを元の状態に戻すように構成されているから(ステップS7〜S9参照)、エンジン7に掛かる負担をより短い時間に制限でき、エンジン7保護の点で効果が高い。
【0083】
しかも、出力特性マップMPを元の状態に戻す場合は、補正ラック位置線Rmodを下向きに徐々(段階的)に平行移動させ、最終的には、最大ラック位置線Rmaxにおける低速回転域の状態を補正前の元の状態に戻すというように、低速回転域での最大燃料噴射量(最大ラック位置)を減らす方向に徐々に移行させるから(ステップS10参照)、最大燃料噴射量(最大ラック位置)のアンダーシュートを防止して元の状態にスムーズに復帰できる。また、最大燃料噴射量(最大ラック位置)が急激に減少したりしないので、エンジン7駆動中の安全性も確保できる。
【0084】
第1実施例では、出力特性マップMPを元の状態に戻した後において、ラック位置センサ109の検出情報から得られるエンジン7の負荷率Zが設定負荷率Z0(規定値)以上であると、出力特性マップMPの一時的な補正の実行を禁止するように構成されているから(ステップS16参照)、エンジン7の出力トルクより大きな負荷(例えば油圧に起因する負荷)がエンジン7に継続的に作用する可能性のある場合に、補正噴射制御の反復実行を防止でき、この点でもエンジン7の保護に寄与している。
【0085】
また、出力特性マップMPを元の状態に戻した後において、エンジン回転数Nの目標値Nsが補正前の値Ns(x)から変わらない場合や、エンジン7の負荷率Zが補正前の値Z(x)から変わらない場合も、出力特性マップMPの一時的な補正の実行を禁止するように構成されているから(ステップS17,S18参照)、これらの場合においても、補正噴射制御の反復実行を防止でき、エンジン7保護の点で有効である。
【0086】
(5).補正噴射制御の別例
図7〜図9には補正噴射制御の別例を示している。これら別例における補正噴射制御の態様は、基本的に前述の第1実施例と同様であるが、出力特性マップMPの一時的な補正を実行する判断基準が第1実施例の場合(エンジン回転数Nの低下率D)と異なっている。
【0087】
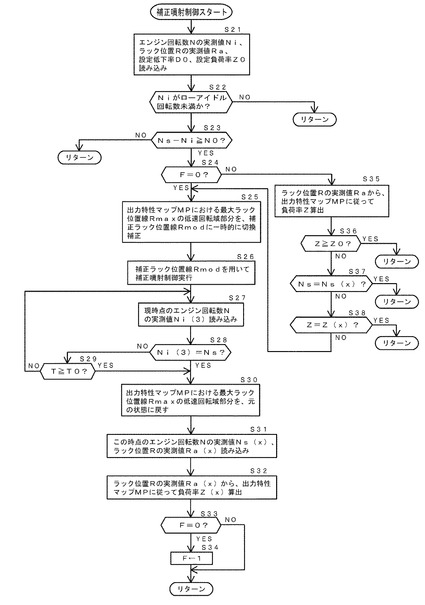
図7のフローチャートは補正噴射制御の第2実施例を示しており、以下に、第1実施例との相違点について説明する。第2実施例の補正噴射制御では、まず、エンジン回転センサ108にて検出されたエンジン回転数Nの実測値Niと、実測値Niに対応した燃料噴射量(ラック位置R)の実測値Raと、エンジン回転数Nの目標値Nsと、設定負荷率Z0とを読み込む(ステップS21)。
【0088】
次いで、エンジン回転数Nの実測値Niがローアイドル回転数未満か否かを判別する(ステップS22)。第2実施例のローアイドル回転数は例えば1000rpm程度に設定されている。エンジン回転数Nの実測値Niがローアイドル回転数以上であれば(S22:NO)、エンジン7の出力トルクが不足する事態は生じないので、そのまま補正噴射制御ルーチンを抜けて、通常の燃料噴射制御に戻る。
【0089】
エンジン回転数Nの実測値Niがローアイドル回転数未満であれば(S22:YES)、次いで、エンジン回転数Nの目標値Nsと実測値Niとの差(Ns−Ni)が設定回転数N0(所定値)以上であるか否かを判別する(ステップS23)。なお、設定回転数N0は、電子ガバナコントローラ102のROM102b等に記憶させる等して予め設定されている。エンジン回転数Nの目標値Nsと実測値Niとの差が設定回転数N0未満であれば(S23:NO)、この場合もエンジン7の出力トルクが不足することはないので、そのまま補正噴射制御ルーチンを抜けて、通常の燃料噴射制御に戻る。
【0090】
エンジン回転数Nの目標値Nsと実測値Niとの差が設定回転数N0以上であれば(S23:NO)、エンジン7の低速回転中に、エンジン7に掛かる負荷が増大してエンジン回転数Nが低下した状態であるので、このままでは、油圧ポンプモータ31や油圧ポンプ32の負荷増大に対してエンジン7の出力トルクが追従できずに不足することになる。そこで、以下は、前述した第1実施例の補正噴射制御(ステップS4〜S18)と同様の手順であるステップS24〜S38の工程を経るのである。
【0091】
このような制御を実行した場合も、第1実施例と同様の作用効果を奏することになる。すなわち、エンジン回転数Nの実測値Niがローアイドル回転数未満の値であり、且つ、エンジン回転数Nの目標値Nsと実測値Niとの差が設定回転数N0(所定値)以上であると、出力特性マップMPの一時的な補正を実行するものであるから、かかる補正を実行する判断基準がエンジン回転数Nの低下率Dである第1実施例の場合と同様に、補正噴射制御(出力特性マップMPの一時的な補正)を適切に実行できる。
【0092】
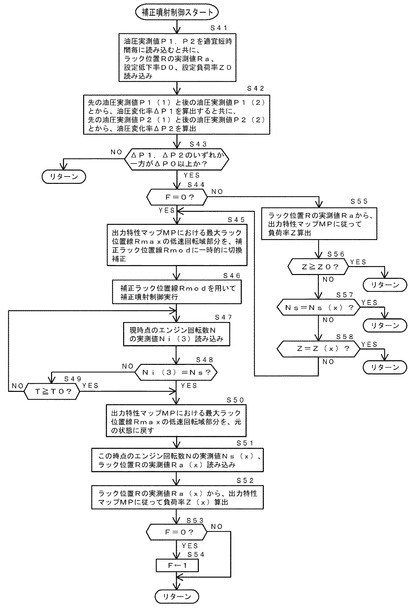
図8のフローチャートは補正噴射制御の第3実施例を示しており、以下に、第1及び第2実施例との相違点について説明する。第3実施例の補正噴射制御では、まず、第1油圧センサ121にて検出された作動油の油圧実測値P1と、第2油圧センサ122にて検出された作動油の油圧実測値P2とを適宜短時間毎に読み込むと共に、ラック位置センサ109にて検出された燃料噴射量(ラック位置R)の実測値Raと、エンジン回転数Nの目標値Nsと、設定負荷率Z0とを読み込む(ステップS41)。
【0093】
次いで、第1油圧センサ121に関して、先に読み込まれた油圧実測値P1(1)と、後に読み込まれた油圧実測値P1(2)とから、油圧ポンプモータ31側の油圧変化率ΔP1を算出すると共に、第2油圧センサ122に関して、先に読み込まれた油圧実測値P2(1)と、後に読み込まれた油圧実測値P2(2)とから、油圧ポンプ32側の油圧変化率ΔP2を算出する(ステップS42)。
【0094】
ここで、油圧変化率ΔP1,ΔP2とは、先の油圧実測値P1(1),P2(1)と後の油圧実測値P1(2),P2(2)との差を先の油圧実測値P1(1),P2(1)で割った値の百分率で表したものである。すなわち、ΔP1={(P1(1)−P1(2)}/P1(1)×100、ΔP2={(P2(1)−P2(2)}/P2(1)×100と表される。
【0095】
次いで、ステップS32にて算出された油圧変化率ΔP1,ΔP2のいずれか一方が設定変化率ΔP0(所定値)以上であるか否かを判別する(ステップS43)。なお、設定変化率ΔP0は、電子ガバナコントローラ102のROM102b等に記憶させる等して予め設定されている。油圧変化率ΔP1,ΔP2の少なくとも一方が設定変化率ΔP0未満であれば(S43:NO)、この場合もエンジン7の出力トルクが不足することはないので、そのまま補正噴射制御ルーチンを抜けて、通常の燃料噴射制御に戻る。
【0096】
油圧変化率ΔP1,ΔP2の少なくとも一方が設定変化率ΔP0以上であれば(S43:YES)、エンジン7の低速回転中に、エンジン7に掛かる負荷が増大してエンジン回転数Nが低下した状態であるので、このままでは、油圧ポンプモータ31や油圧ポンプ32の負荷増大に対してエンジン7の出力トルクが追従できずに不足することになる。そこで、以下は、前述した第1実施例の補正噴射制御(ステップS4〜S18)と同様の手順であるステップS44〜S58の工程を経るのである。
【0097】
このような制御を実行した場合も、第1及び第2実施例と同様の作用効果を奏することになる。特に、各ポンプ31,32から供給される作動油の油圧変化率ΔP1,ΔP2の少なくとも一方が設定変化率ΔP0(所定値)以上であると、出力特性マップMPの一時的な補正を実行するものであるから、例えば油圧等に起因した負荷増大の検出タイミングを、各ポンプ31,32からの作動油の油圧変化率ΔP1,ΔP2から把握することになる。このため、エンジン回転数Nを基準にして検出タイミングを計る第1及び第2実施例の場合よりも素早い判別が可能になり、補正噴射制御に要する時間を短縮できる。
【0098】
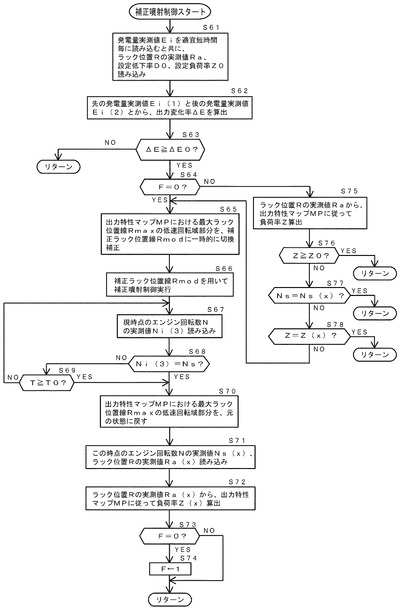
図9のフローチャートは補正噴射制御の第4実施例を示しており、以下に、第1〜第3実施例との相違点について説明する。第4実施例の補正噴射制御では、まず、発電量センサ112にて検出されたオルタネータ111の発電量実測値Eiを適宜短時間毎に読み込むと共に、ラック位置センサ109にて検出された燃料噴射量(ラック位置R)の実測値Raと、エンジン回転数Nの目標値Nsと、設定負荷率Z0とを読み込む(ステップS61)。
【0099】
次いで、先に読み込まれた発電量実測値Ei(1)と、後に読み込まれた発電量実測値Ei(2)とから、オルタネータ111の出力変化率ΔEを算出する(ステップS62)。ここで、出力変化率ΔEとは、先の発電量実測値Ei(1)と後の発電量実測値Ei(2)との差を先の発電量実測値Ei(1)で割った値の百分率で表したものである。すなわち、ΔE={(Ei(1)−Ei(2)}/Ei(1)×100と表される。
【0100】
次いで、ステップS62にて算出された出力変化率ΔEが基準変化率ΔE0(所定値)以上であるか否かを判別する(ステップS63)。なお、基準変化率ΔE0は、電子ガバナコントローラ102のROM102b等に記憶させる等して予め設定されている。出力変化率ΔEが基準変化率ΔE0未満であれば(S63:NO)、この場合もエンジン7の出力トルクが不足することはないので、そのまま補正噴射制御ルーチンを抜けて、通常の燃料噴射制御に戻る。
【0101】
出力変化率ΔEが基準変化率ΔE0以上であれば(S63:YES)、エンジン7の低速回転中に、エンジン7に掛かる負荷が増大してエンジン回転数Nが低下した状態であるので、このままでは、油圧ポンプモータ31や油圧ポンプ32の負荷増大に対してエンジン7の出力トルクが追従できずに不足することになる。そこで、以下は、前述した第1実施例の補正噴射制御(ステップS4〜S18)と同様の手順であるステップS64〜S78の工程を経るのである。
【0102】
このような制御を実行した場合も、第1〜第3実施例と同様の作用効果を奏することになる。特に、オルタネータ111の出力変化率ΔEが基準変化率ΔE0(所定値)以上であると、出力特性マップMPの一時的な補正を実行するものであるから、例えば油圧等に起因した負荷増大の検出タイミングを、オルタネータ111の出力変化率ΔEから把握することになる。このため、エンジン回転数Nを基準にして検出タイミングを計る第1及び第2実施例の場合よりも素早い判別が可能になり、第3実施例の場合と同様に、補正噴射制御に要する時間を短縮できるのである。
【0103】
(6).その他
本願発明は、前述の実施形態に限らず、様々な態様に具体化できる。例えば本願発明はバックホウに限らず、コンバイン等の農作業機や、ホイルローダ等の特殊作業用車両にも適用可能である。その他、各部の構成は図示の実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々変更が可能である。
【符号の説明】
【0104】
1 作業機械としてのバックホウ
7 エンジン
10 作業部
31 油圧源としての油圧ポンプモータ
32 油圧源としての油圧ポンプ
101 制御手段としての本機コントローラ
102 制御手段としての電子ガバナコントローラ
106 燃料噴射ポンプ
107 電子ガバナ
108 回転数検出手段としてのエンジン回転センサ
109 負荷検出手段としてのラック位置センサ
121 第1油圧センサ
122 第2油圧センサ
【技術分野】
【0001】
本願発明は、例えばバックホウのような作業機械に用いられるエンジン制御装置に関するものである。
【背景技術】
【0002】
従来から、作業機械の一例であるバックホウは一般に、アーム等の作業部に対する油圧アクチュエータに作動油を供給する油圧ポンプと、当該油圧ポンプを作動させるエンジンとを備えており、油圧ポンプからの作動油にて油圧アクチュエータを駆動させることにより、所定の仕事が実行される。また、エンジンの出力は油圧ポンプだけでなく、クローラ等の走行部にも分配して伝達される。
【0003】
この種のバックホウでは、エンジンコントローラが出力特性マップに基づいて電子ガバナ付きの燃料噴射装置の作動を制御することにより、スロットルレバー等の操作量に応じた目標エンジン回転数となり且つエンジン負荷にも対応するように燃料噴射量を調節して、エンジンの出力(エンジン回転数と出力トルク)を制御している(例えば特許文献1等参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−340152号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、1台のエンジンの出力が走行部と作業部との双方の駆動に用いられるバックホウでは、エンジンが回転数の低いローアイドル状態の場合において、省エネ、低騒音及び低振動の観点から、ローアイドル回転数(アイドリング回転数)を極力低く抑えている。
【0006】
しかし、この場合は、エンジン回転数が高速回転域にある場合に比べて、急激な油圧負荷の上昇に対するエンジンの出力トルクの上昇が鈍くなる。このため、例えば運搬用トラックからのバックホウの積み降ろしに際して、ローアイドル状態でバケットを地面に押し付けると、油圧ポンプの負荷が急激に上昇するものの、エンジンの出力トルクの応答が追従できず、油圧ポンプの負荷に対してエンジンの出力トルクが不足する。その結果、黒煙を排出してノッキングを生じたりエンジンストールを引き起こしたりするという問題があった。
【0007】
そこで、本願発明は、ローアイドル状態での油圧負荷の上昇による黒煙発生やエンジンストールを防止して、安定したローアイドル状態を維持できるようにすることを技術的課題とするものである。
【課題を解決するための手段】
【0008】
請求項1の発明は、エンジンと、前記エンジンに燃料を噴射する燃料噴射装置と、エンジン回転数を検出する回転数検出手段と、エンジン回転数と燃料噴射量との関係を示す制御パターンを予め記憶させた記憶手段と、前記制御パターンに基づいて前記燃料噴射装置の作動を制御する制御手段とを備えているエンジン制御装置において、前記エンジンの低速回転中にエンジン負荷の増大にてエンジン回転数が低下した場合は、前記エンジンの低速回転域での最大燃料噴射量が増大するように、前記制御パターンを一時的に補正して、前記補正した制御パターンに基づき燃料噴射量を制御する補正噴射制御を実行する構成であって、前記制御パターンの一時的な補正実行の可否を、前記エンジンの動力にて駆動する油圧源から供給される作動油の油圧に基づき決定するというものである。
【0009】
請求項2の発明は、請求項1に記載のエンジン装置において、前記油圧源からの作動油の油圧変化率が予め設定した設定油圧率以上である場合に、前記制御パターンの一時的な補正を許可するというものである。
【0010】
請求項3の発明は、請求項2に記載のエンジン装置において、前記エンジンの始動後に前記補正噴射制御を1回以上実行した場合において、前記エンジンの負荷を検出する負荷検出手段から得られるエンジンの負荷率が規定値以上のときは、前記制御パターンの一時的な補正を行わず前記補正噴射制御を実行しないというものである。
【0011】
請求項4の発明は、請求項2に記載のエンジン装置において、前記エンジンの始動後に前記補正噴射制御を1回以上実行した場合において、前記エンジン回転数の前記目標値が補正前の値から変化しないときは、前記制御パターンの一時的な補正を行わず前記補正噴射制御を実行しないというものである。
【0012】
請求項5の発明は、請求項2に記載のエンジン装置において、前記エンジンの始動後に前記補正噴射制御を1回以上実行した場合において、前記エンジンの前記負荷率が補正前の値から変化しないときは、前記制御パターンの一時的な補正を行わず前記補正噴射制御を実行しないというものである。
【発明の効果】
【0013】
本願発明によると、エンジンの低速回転中にエンジン負荷の増大にてエンジン回転数が低下した場合は、前記エンジンの低速回転域での最大燃料噴射量が増大するように、エンジン回転数と燃料噴射量との関係を示す制御パターンを一時的に補正するという構成になっているから、前記エンジンの低速回転中に、例えば油圧等に起因して前記エンジンに掛かる負荷が増大しても、最大燃料噴射量を一時的に引き上げて、前記エンジンの出力トルクを増大できる。従って、トルク不足に起因するエンジン回転数の低下をなくして、黒煙及びノッキングの発生を防止できると共に、エンジンストールのおそれを抑制できるという効果を奏する。
【0014】
また、例えば油圧等に起因した負荷増大の検出タイミングを、前記油圧源からの作動油の油圧に基づき把握できるから、エンジン回転数を基準にして検出タイミングを計る場合よりも素早い判別が可能になり、前記制御パターンの一時的な補正の実行に要する時間を短縮できるという効果を奏する。
【図面の簡単な説明】
【0015】
【図1】バックホウの側面図である。
【図2】キャビン内の平面図である。
【図3】バックホウの油圧系統図である。
【図4】制御手段の機能ブロック図である。
【図5】エンジン回転数とラック位置との関係を示す出力特性マップの説明図である。
【図6】第1実施例の補正噴射制御のフローチャートである。
【図7】第2実施例の補正噴射制御のフローチャートである。
【図8】第3実施例の補正噴射制御のフローチャートである。
【図9】第4実施例の補正噴射制御のフローチャートである。
【発明を実施するための形態】
【0016】
以下に、本願発明を具体化した実施形態を、作業機械としてのバックホウに適用した図面(図1〜図9)に基づいて説明する。
【0017】
(1).バックホウの概要
まず始めに、主に図1及び図2を参照しながら、バックホウ1の概要について説明する。なお、図2では説明の便宜上、キャビン6の図示を省略している。
【0018】
作業機械の一例であるバックホウ1は、左右一対の走行クローラ3(図1では左側のみ示す)を有するクローラ式の走行装置2と、走行装置2上に設けられた旋回台4(機体)とを備えている。旋回台4は、旋回モータ9(図2参照)にて、360°の全方位にわたって水平旋回可能に構成されている。走行装置2の前部には排土板5が昇降回動可能に装着されている。
【0019】
旋回台4には、操縦部としてのキャビン6とディーゼルタイプのエンジン7とが搭載されている。旋回台4の前部には、掘削作業のためのブーム11、アーム12及びバケット13を有する作業部10が設けられている。図2に詳細に示すように、キャビン6の内部には、オペレータが着座する操縦座席8、エンジン7の出力回転数を設定保持するスロットル操作手段としてのスロットルレバー116、並びに、作業部操作手段としてのレバー・スイッチ群117〜120(旋回操作レバー117、アーム操作レバー118、バケット操作スイッチ119及びブーム操作レバー120)等が配置されている。
【0020】
作業部10の構成要素であるブーム11は、先端側を前向きに突き出して側面視く字状に屈曲した形状に形成されている。ブーム11の基端部は、旋回台4の前部に取り付けられたブームブラケット14に、横向きのブーム軸15を中心にして首振り回動可能に枢着されている。ブーム11の内面(前面)側には、これを上下に首振り回動させるための片ロッド複動形のブームシリンダ16が配置されている。ブームシリンダ16のシリンダ側端部は、ブームブラケット14の前端部に回動可能に枢支されている。ブームシリンダ16のロッド側端部は、ブーム11における屈曲部の前面側(凹み側)に固定された前ブラケット17に回動可能に枢支されている。ブームシリンダ16は油圧アクチュエータに相当する。
【0021】
ブーム11の先端部には、長手角筒状のアーム12の基端部が、横向きのアーム軸19を中心にして首振り回動可能に枢着されている。ブーム11の上面前部側には、アーム12を首振り回動させるための片ロッド複動形のアームシリンダ20が配置されている。アームシリンダ20のシリンダ側端部は、ブーム11における屈曲部の背面側(突出側)に固定された後ブラケット18に回動可能に枢支されている。アームシリンダ20のロッド側端部は、アーム12の基端側外面(前面)に固着されたアームブラケット21に回動可能に枢支されている。
【0022】
アーム12の先端部には、掘削用アタッチメントとしてのバケット13が、横向きのバケット軸22を中心にして掬い込み回動可能に枢着されている。アーム12の外面(前面)側には、バケット13を掬い込み回動させるための片ロッド複動形のバケットシリンダ23が配置されている。バケットシリンダ23のシリンダ側端部は、アームブラケット21に回動可能に枢支されている。バケットシリンダ23のロッド側端部は、連結リンク24及び中継ロッド25を介してバケット13に回動可能に枢支されている。旋回モータ9、アームシリンダ20及びバケットシリンダ23も、油圧アクチュエータに相当する。
【0023】
(2).バックホウの油圧系統
次に、図3を参照しながら、バックホウ1の油圧系統30構造について説明する。
【0024】
図3に示すバックホウ1の油圧系統30は、油圧源としての可変容量形の油圧ポンプモータ31及び可変容量形の油圧ポンプ32を備えている。これらポンプ31,32群にはエンジン7から突出した出力軸27が貫通していて、ポンプ31,32群は、出力軸27の回転にて駆動するように構成されている。すなわち、ポンプ31,32群を駆動させる回転軸(出力軸27)は共通する1本の軸になっている。
【0025】
油圧ポンプモータ31は、比較的大きな駆動力が必要なブームシリンダ16に作動油を供給するためのものである。油圧ポンプ32は、旋回モータ9、アームシリンダ20及びバケットシリンダ23に作動油を供給するためのものである。
【0026】
(2−1).閉ループ油圧回路の構造
まず、ブームシリンダ16を駆動させる閉ループ油圧回路34について説明する。閉ループ油圧回路34は、前述した片ロッド複動形のブームシリンダ16と、斜板式のアキシャルピストンポンプモータである油圧ポンプモータ31とを備えている。ブームシリンダ16と油圧ポンプモータ31とは、ボトム側油路35及びロッド側油路36にて閉ループ状に接続されている。この場合、ブームシリンダ16のボトム油室37がボトム側油路35を介して油圧ポンプモータ31に接続され、ブームシリンダ16のロッド油室38がロッド側油路36を介して油圧ポンプモータ31に接続されている。
【0027】
このため、油圧ポンプモータ31には、ブームシリンダ16からの作動油がボトム側又はロッド側油路35,36を経由して供給され、その結果、油圧ポンプモータ31がモータとしての作用を発揮し、共通の出力軸27上にある油圧ポンプ32の駆動を一部又は全部負担することになる。すなわち、油圧ポンプモータ31のモータ的な動作によって、油圧ポンプ32の駆動負荷が軽減されるから、エンジン全体としての仕事量を軽減でき、燃費改善に効果を発揮する。
【0028】
閉ループ油圧回路34は、油圧ポンプモータ31における可動斜板31aの傾斜角度(斜板角度)を制御する油圧サーボ機構40を備えている。油圧サーボ機構40は、可動斜板31aの傾斜角度を変更させる片ロッド形の複動調整シリンダ41と、調整シリンダ41に作動油を供給する調整ポンプ42と、調整ポンプ42からの作動油の供給方向及び供給量を調節するための4ポート3位置切換形の電磁サーボ弁43とを有している。
【0029】
電磁サーボ弁43の入口ポートは調整ポンプ42を介して作動油タンク44に接続され、出口ポートは直接作動油タンク44に接続されている。電磁サーボ弁43のボトム側ポートは、複動調整シリンダ41のボトム油室45に接続され、ロッド側ポートは複動調整シリンダ41のロッド油室46に接続されている。複動調整シリンダ41におけるピストンロッド47の先端は、油圧ポンプモータ31の可動斜板31aに連動連結されている。
【0030】
電磁サーボ弁43は、キャビン6内に配置されたブーム操作レバー120の操作量に対応した電磁ソレノイドの励磁によって、中立状態と、複動調整シリンダ41のボトム油室45への作動油供給状態と、複動調整シリンダ41のロッド油室46への作動油供給状態とに切換駆動するように構成されている。
【0031】
ブーム操作レバー120の操作にて電磁サーボ弁43を切換駆動させると、複動調整シリンダ41が伸縮動して、油圧ポンプモータ31における可動斜板31aの傾斜角度が変更・調節され、油圧ポンプモータ31からブームシリンダ16への作動油の供給方向及び供給量が調節される。その結果、ブームシリンダ16の伸縮方向及び伸縮量が無段階に変更されて、ブーム11が上下に首振り回動することになる。
【0032】
ボトム側油路35とロッド側油路36との間には、3ポート3位置切換形の方向切換弁50が配置されている。方向切換弁50は、ブームシリンダ16における両油室37,38の受圧面積差等に起因して、一方の油室37から流出する作動油量が他方の油室38に流入する作動油量より多い場合の余剰分を排出するためのものである。
【0033】
方向切換弁50における一方の入口ポートは、第1入口油路51を介してボトム側油路35に接続され、他方の入口ポートは、第2入口油路52を介してロッド側油路36に接続されている。方向切換弁50の出口ポートはドレイン油路53を介して作動油タンク44に接続されている。
【0034】
また、方向切換弁50は、ボトム側パイロット油路54を介してボトム側油路35に接続されている一方、ロッド側パイロット油路55を介してロッド側油路36に接続されている。このため、ボトム側パイロット油路54の圧力は、ボトム側油路35の圧力、ひいてはブームシリンダ16におけるボトム油室37の圧力と略同じになっている。そして、ロッド側パイロット油路55の圧力は、ロッド側油路36の圧力、ひいてはブームシリンダ16におけるロッド油室38の圧力と略同じになっている。
【0035】
方向切換弁50は、両パイロット油路54,55の圧力差に応じて、中立状態と、ボトム側油路35からドレイン油路53への作動油排出状態と、ロッド側油路36からドレイン油路53への作動油排出状態とに切換駆動するように構成されている。当該方向切換弁50の作用にて、ボトム側及びロッド側油路35,36間を流通する作動油量の不均衡が是正され、ブームシリンダ16がスムーズに伸縮動することになる。
【0036】
ボトム側油路35とロッド側油路36との間には、2つのリリーフ弁63,64と2つの逆止弁65,66とを有するチャージリリーフ回路60が配置されている。チャージリリーフ回路60は基本的に、一方の油路35(36)内の圧力が高くなり過ぎると、作動油をブームシリンダ16における一方の油室37(38)に供給せずに、他方の油路36(35)や作動油タンク44に逃がして、閉ループ油圧回路34の過負荷を防止するように構成されている。閉ループ油圧回路34中の作動油量が少ない場合は、油圧ポンプモータ31の自吸力にて、作動油タンク44からチャージリリーフ回路60を介して不足分の作動油が補給される。
【0037】
実施形態では、ボトム側油路35とロッド側油路36とに、一対のバイパス油路61,62が並列状に接続されている。シリンダ側バイパス油路61中には、ボトム側油路35内の圧力を逃がすための第1リリーフ弁63と、ロッド側油路36内の圧力を逃がすための第2リリーフ弁64とが設けられている。ポンプ側バイパス油路62中には、ボトム側油路35の方向にのみ開く第1逆止弁65と、ロッド側油路36の方向にのみ開く第2逆止弁66とが設けられている。
【0038】
シリンダ側バイパス油路61における両リリーフ弁64,65の間と、ポンプ側バイパス油路62における両逆止弁66,67の間とは、排出油路67にてつながっている。排出油路67の先端は、ドレイン油路53の中途部に接続されている。従って、排出油路67はドレイン油路53を介して作動油タンク44に連通している。
【0039】
(2−2).チャージ油圧回路の構造
次に、旋回モータ9、アームシリンダ20及びバケットシリンダ23を駆動させるチャージ油圧回路74について説明する。チャージ油圧回路74は、前述した旋回モータ9と、片ロッド複動形のアームシリンダ20と、片ロッド複動形のバケットシリンダ23と、斜板式のアキシャルピストンポンプである油圧ポンプ32と、油圧調整機構75とを備えている。
【0040】
油圧ポンプ32の吸入側は吸入油路76を介して作動油タンク44に連通している。油圧ポンプ32の吐出側から延びるチャージ油路77には、それぞれ対応する流量制御弁ユニット78,79,80を介して、旋回モータ9とアームシリンダ20とバケットシリンダ23とが分岐接続されている。
【0041】
旋回用の流量制御弁ユニット78は、キャビン6内に配置された旋回操作レバー117の操作量に応じて、中立状態と、旋回モータ9に対する一方のモータ油路81への作動油供給状態と、他方のモータ油路82への作動油供給状態とに切換駆動するように構成されている。旋回操作レバー117の操作にて旋回用の流量制御弁ユニット78を切換駆動させると、油圧ポンプ32から旋回モータ9への作動油の供給方向及び供給量が調節される。その結果、旋回モータ9の回転方向及び回転量が無段階に変更されて、旋回台4が水平旋回することになる。
【0042】
アーム用の流量制御弁ユニット79は、キャビン6内に配置されたアーム操作レバー118の操作量に応じて、中立状態と、アームシリンダ20に対するボトム側油路83への作動油供給状態と、ロッド側油路84への作動油供給状態とに切換駆動するように構成されている。アーム操作レバー118の操作にてアーム用の流量制御弁ユニット79を切換駆動させると、油圧ポンプ32からアームシリンダ20への作動油の供給方向及び供給量が調節される。その結果、アームシリンダ20の伸縮方向及び伸縮量が無段階に変更されて、アーム12が上下に首振り回動することになる。
【0043】
バケット用の流量制御弁ユニット80は、スライド式のバケット操作スイッチ119の操作量に応じて、中立状態と、バケットシリンダ23に対するボトム側油路85への作動油供給状態と、ロッド側油路86への作動油供給状態とに切換駆動するように構成されている。バケット操作スイッチ119の操作にてバケット用の流量制御弁ユニット80を切換駆動させると、油圧ポンプ32からバケットシリンダ23への作動油の供給方向及び供給量が調節される。その結果、バケットシリンダ23の伸縮方向及び伸縮量が無段階に変更されて、アーム12の先端部にあるバケット13が、横向きのバケット軸22回りに掬い込み回動することになる。
【0044】
油圧調整機構75は、油圧ポンプ32における可動斜板32aの傾斜角度を制御するためのものであり、可動斜板32aの傾斜角度を変更させる片ロッド形の単動調整シリンダ90と、油圧ポンプ32から単動調整シリンダ90への作動油の供給方向及び供給量を調節するための3ポート2位置切換形のチャージ用電磁サーボ弁91とを備えている。
【0045】
チャージ用電磁サーボ弁91の油路側第1ポートは、チャージ油路77のうち油圧ポンプ32と各流量制御弁ユニット78〜80への分岐部87との間に接続され、油路側第2ポートは直接作動油タンク44に接続されている。チャージ用電磁サーボ弁91のシリンダ側ポートは単動調整シリンダ90のボトム油室に接続されている。単動調整シリンダ90のロッド室には、ピストンロッド94を短縮動させる方向に付勢する戻しバネ95が内装されている。単動調整シリンダ90におけるピストンロッド94の先端は、油圧ポンプ32の可動斜板32aに連動連結されている。
【0046】
チャージ用電磁サーボ弁91は、第1パイロット油路96を介して、チャージ油路77のうち油圧ポンプ32と分岐部87との間に接続されている一方、第2パイロット油路97を介して各流量制御弁ユニット78〜80に接続されている。このため、第1パイロット油路96の圧力は油圧ポンプ32の吐出側の圧力と略同じになっている。そして、第2パイロット油路97の圧力は、旋回モータ9、アームシリンダ20及びバケットシリンダ23における吸入側の圧力のうち最も高圧なものと略同じになっている。
【0047】
この場合、チャージ用電磁サーボ弁91は基本的に、第1及び第2パイロット油路96,97の圧力差に応じて、単動調整シリンダ90のボトム油室への作動油供給状態と、ボトム油室からの作動油排出状態とに切換駆動するように構成されている。
【0048】
第1及び第2パイロット油路96,97の圧力差が予め設定された所定範囲から外れて、チャージ用電磁サーボ弁91が切換駆動すると、単動調整シリンダ90が伸縮動して、油圧ポンプ32における可動斜板32aの傾斜角度が変更・調節され、油圧ポンプ32から各油圧アクチュエータ(この場合は旋回モータ9、アームシリンダ20及びバケットシリンダ23)への作動油の供給方向及び供給量が調節される。
【0049】
その結果、油圧ポンプ32の吐出側の圧力と各油圧アクチュエータ9,20,23の吸入側の圧力との差が所定範囲内に調整され、各油圧アクチュエータ9,20,23に掛かる負荷の大小に拘らず、各油圧アクチュエータ9,20,23に供給される作動油量が略一定に保持されることになる。すなわち、各油圧アクチュエータ9,20,23の作動速度を略一定に保持するロードセンシング機能が働くことになる。
【0050】
(3).燃料噴射制御を実行するための構成
次に、図4及び図5を参照しながら、バックホウ1の燃料噴射制御を実行するための構成について説明する。
【0051】
バックホウ1には、制御手段としての本機コントローラ101及び電子ガバナコントローラ102が搭載されている。これらコントローラ101,102は、バックホウ1の作動全般を制御すると共に、後述する燃料噴射制御等を実行するためのものであり、各種演算処理や制御を実行するCPU101a,102aの他、制御プログラムやデータを記憶させる記憶手段としてのROM101b,102b、制御プログラムやデータを一時的に記憶させるためのRAM101c,102c、及び入出力インターフェイス等を備えている。メインコントローラ101と電子ガバナコントローラ102とは、互いにCAN通信バス100を介して電気的に接続されている。
【0052】
本機コントローラ101は、電源印加用のキースイッチ103を介してバッテリ104に接続されている。キースイッチ103は、エンジン7を始動させるためのスタータ105にも接続されている。また、本機コントローラ101には、出力関連の機器として、調整ポンプ42からの作動油の供給方向及び供給量を調節するための電磁サーボ弁43と、油圧ポンプ32からの作動油の供給方向及び供給量を調節するためのチャージ用電磁サーボ弁91とが接続されている。更に、本機コントローラ101には、入力関連の機器として、キャビン6内に配置されたレバー・スイッチ群117〜120(旋回操作レバー117、アーム操作レバー118、バケット操作スイッチ119及びブーム操作レバー120)、閉ループ油圧回路34側の油圧ポンプモータ31から供給される作動油の油圧を検出する油圧検出手段としての第1油圧センサ121、並びに、チャージ油圧回路74側の油圧ポンプ32から供給される作動油の油圧を検出する油圧検出手段としての第2油圧センサ122等が接続されている。
【0053】
電子ガバナコントローラ102には、燃料噴射装置である燃料噴射ポンプ106に設けられた電子ガバナ107と、エンジン回転数を検出する回転数検出手段としてのエンジン回転センサ108と、燃料噴射ポンプ106のラック位置から燃料噴射量を検出する負荷検出手段としてのラック位置センサ109と、スロットルレバー116の操作位置を検出するスロットルポテンショ110と、エンジン7の動力にて発電する発電機としてのオルタネータ111の発電量を検出する発電量検出手段としての発電量センサ112とが接続されている。電子ガバナ107は、燃料噴射ポンプ106のラック位置を調節するためのラックアクチュエータ(図示省略)を有している。
【0054】
電子ガバナコントローラ102のROM102bには、エンジン回転数Nとラック位置R(燃料噴射量)との関係を示す制御パターンとしての出力特性マップMP(図5参照)が予め記憶されている。この種の出力特性マップMPは実験等にて求められる。なお、制御パターンとしては、実施形態のようなマップ形式に限らず、例えば関数表形式のものでもよい。
【0055】
図5に示す出力特性マップMPでは、エンジン回転数Nを横軸に採り、ラック位置R(燃料噴射量)を縦軸に採っている。当該出力特性マップにおいて、上向き凸湾曲状に描かれた実線Rmaxは各エンジン回転数Nに対する最大ラック位置を表した最大ラック位置線である。略L字状に描かれた実線Rminは、各エンジン回転数Nに対する最小ラック位置を表した最小ラック位置線であり、このときの燃料噴射量は0(零)になっている。最大ラック位置線Rmaxと最小ラック位置線Rminとの間に描かれた湾曲状の実線Ridlは、各エンジン回転数Nに対する無負荷ラック位置を表した無負荷ラック位置線である。更に、低速回転域(エンジン回転数Nが低速な図5左側の領域)に描かれた二点鎖線Rmodは、低速回転域での最大ラック位置を一時的に引き上げるための補正ラック位置線である。
【0056】
電子ガバナコントローラ102は主として、エンジン回転センサ108にて検出されるエンジン回転数Nの実測値Ni、スロットルポテンショ110にて検出されるエンジン回転数Nの目標値Ns、及び、ラック位置センサ109にて検出される燃料噴射量(ラック位置R)の実測値Raから、出力特性マップMPを用いて燃料噴射量の目標値Rsを演算し、当該演算結果に応じてラックアクチュエータを駆動させるという燃料噴射制御を実行するように構成されている。
【0057】
(4).燃料噴射制御の説明
次に、図6〜図9に示すフローチャートを参照しながら、燃料噴射制御の一例について説明する。
【0058】
実施形態の電子ガバナコントローラ102は、燃料噴射制御の一例として、エンジン7の低速回転中にエンジン負荷の増大に起因してエンジン回転数Nが低下した場合に、低速回転域での最大燃料噴射量(最大ラック位置)が増大するように、出力特性マップMPを一時的に補正し、補正された出力特性マップMPに基づいて燃料噴射ポンプ106の作動を制御する補正噴射制御を実行するように構成されている。この補正噴射制御は、通常の燃料噴射制御の実行中に割り込み処理される。
【0059】
図6のフローチャートを参照しながら、補正噴射制御の第1実施例の流れを説明する。ここで、エンジン回転数Nの目標値Nsはスロットルレバー116にて予め設定され、後述するエンジン回転数Nの単位時間当りの設定低下率D0、設定負荷率Z0及び設定時間T0は、電子ガバナコントローラ102のROM102b等に記憶させる等して予め設定されているものとする。また、後述する補正実行フラグFは、エンジン7の始動時(電子ガバナコントローラ102の起動時)にリセット状態(F=0)に設定されているものとする。
【0060】
第1実施例の補正噴射制御では、まず、エンジン回転センサ108にて検出されたエンジン回転数Nの実測値Niと、当該実測値Niに対応した燃料噴射量(ラック位置R)の実測値Raとを適宜短時間毎に読み込むと共に、エンジン回転数Nの目標値Nsと、エンジン回転数Nの単位時間当りの設定低下率D0と、設定負荷率Z0とを読み込む(ステップS1)。
【0061】
次いで、先に読み込まれた実測値Ni(1)と、後に読み込まれた実測値Ni(2)とから、エンジン回転数Nの単位時間当りの低下率Dを算出する(ステップS2)。ここで、低下率Dとは、先の実測値Ni(1)と後の実測値Ni(2)との差を先の実測値Ni(1)で割った値の百分率で表したものである。すなわち、D={(Ni(1)−Ni(2)}/Ni(1)×100と表される。
【0062】
次いで、ステップS2にて算出された低下率Dが設定低下率D0(所定値)以上であるか否かを判別する(ステップS3)。低下率Dが設定低下率D0以上の場合とは、エンジン7の低速回転中に、油圧ポンプモータ31や油圧ポンプ32の負荷が急激に上昇してエンジン7に掛かる負荷が増大する結果、エンジン回転数Nが低下した場合を意味している。この状態では、油圧ポンプモータ31や油圧ポンプ32の負荷増大に対してエンジン7の出力トルクが追従できずに不足し、黒煙を排出してノッキングを生じたりエンジンストールを引き起こしたりすることになる。
【0063】
先の実測値Ni(1)と後の実測値Ni(2)との差がさほど大きくなくても、低下率Dの分母となる先の実測値Ni(1)が例えばローアイドル回転数程度の小さい値であれば、低下率Dは大きい値となる。このため、エンジン回転数Nの単位時間当りの低下率Dだけで、エンジン7が低速回転中であり且つエンジン回転数Nが低下したことを判別できる。
【0064】
そこで、ステップS2にて算出された低下率Dが設定低下率D0未満であれば(S3:NO)、エンジン7の出力トルクが不足する事態は生じないので、そのまま補正噴射制御ルーチンを抜けて(リターンして)、通常の燃料噴射制御に戻る。一方、ステップS2にて算出された低下率Dが設定低下率D0以上であれば(S3:YES)、このままではエンジン7の出力トルクが不足するので、次いで、補正実行フラグFがリセット状態(F=0)であるか否かを判別する(ステップS4)。
【0065】
補正実行フラグFは、エンジン7の始動後において、これまで補正噴射制御を実行したか否かを判別するためのフラグである。補正実行フラグFがセット状態(F=1)であれば(S4:NO)、エンジン7の始動後において少なくとも1回は補正噴射制御を実行したことがあるから、後述するステップS15へ移行する。
【0066】
補正実行フラグFがリセット状態(F=0)であれば(S4:YES)、エンジン7の始動後において一度も補正噴射制御を実行していないから、次いで、エンジン7の低速回転域での最大燃料噴射量が増大するように、出力特性マップMPの最大ラック位置線Rmaxのうちエンジン7の低速回転域に当る部分を、これより上方に位置する補正ラック位置線Rmodに一時的に切り換える補正を実行する(ステップS5)。
【0067】
そして、低速回転域での最大ラック位置を一時的に引き上げた補正ラック位置線Rmodを用いて、燃料噴射量(ラック位置R)の目標値Rsを演算し、当該演算結果に応じてラックアクチュエータを駆動させるという補正噴射制御を実行する(ステップS6)。
【0068】
次いで、現時点におけるエンジン回転数Nの実測値Ni(3)をエンジン回転センサにて検出して読み込み(ステップS7)、当該実測値Ni(3)がステップS1にて読み込まれたエンジン回転数Nの目標値Nsにまで復帰したか否かを判別する(ステップS8)。エンジン回転数Nの実測値Ni(3)が目標値Nsにまで復帰していれば(S8:YES)、例えば補正ラック位置線Rmodを下向きに徐々(段階的)に平行移動させ、最終的には、最大ラック位置線Rmaxにおける低速回転域の状態を補正前の元の状態に戻す(ステップS10)。
【0069】
エンジン回転数Nの実測値Ni(3)が目標値Nsにまで復帰していなければ(S8:NO)、次いで、ステップS6での補正噴射制御の実行からの時間Tが設定時間T0を経過したか否かを判別する(ステップS9)。第1実施例の設定時間T0は例えば1〜3秒に設定されている。設定時間T0を経過していれば(S9:YES)、ステップS10へ移行して、最大ラック位置線Rmaxにおける低速回転域の状態を補正前の元の状態に戻す。設定時間T0を経過していなければ(S9:NO)、ステップS7に戻る。
【0070】
補正噴射制御は低速回転域での最大ラック位置を強制的に上昇させるので、補正噴射制御を長時間続けると、エンジン7に掛かる負担が大変大きい。そこで、第1実施例では、ステップS7〜S9の工程を経ることにより、補正噴射制御の実行時間をできるだけ短くして、エンジン7に負担が掛かる時間を短時間に制限し、エンジン7の保護を図っている。
【0071】
ステップS10において、最大ラック位置線Rmaxにおける低速回転域の状態を補正前の元の状態に戻した後は、この時点におけるエンジン回転数Nの目標値Ns(x)と、ラック位置Rの実測値Ra(x)とを読み込み(ステップS11)、ラック位置Rの実測値Ra(x)から、出力特性マップMPに従ってエンジン7の負荷率Z(x)を算出して、電子ガバナコントローラ102のRAM102c等に記憶させる(ステップS12)。エンジン回転数Nの目標値Ns(x)と負荷率Z(x)とは、後述するステップS15以降での判別基準として用いられるものである。
【0072】
ここで、エンジン7の負荷率Z(Z(x)も同じ)とは、任意のエンジン回転数Nにおいて、無負荷ラック位置線Ridl上の点Ri〜最大ラック位置線Rmax上の点Rm間の幅を100%とし、これに対する無負荷ラック位置線Ridl上の点Ri〜ラック位置Rの実測値Ra間の幅の割合を表したものである。すなわち、Z=(Ra−Ri)/(Rm−Ri)×100と表される。
【0073】
ステップS12の実行後は、補正実行フラグFがリセット状態か否かを判別する(ステップS13)。補正実行フラグFがリセット状態であれば(S13:YES)、セット状態に変更してから(ステップS14)、補正噴射制御ルーチンを抜けて通常の燃料噴射制御に戻る。セット状態であれば(S13:NO)、そのまま補正噴射制御ルーチンを抜けて通常の燃料噴射制御に戻る。
【0074】
さて、前述の通り、ステップS4において、エンジン7の始動後において少なくとも1回は補正噴射制御を実行したことがあれば(S4:NO)、ステップS15へ移行する。ステップS15では、ステップS1にて先に読み込まれたラック位置Rの実測値Ra(1)から、出力特性マップMPに従ってエンジン7の負荷率Zを算出する。
【0075】
次いで、ステップS15にて算出された負荷率Zが設定負荷率Z0(規定値)以上であるか否かを判別する(ステップS16)。負荷率Zが設定負荷率Z0以上の場合とは、エンジン7の出力トルクより大きな負荷(例えば油圧に起因する負荷)がエンジン7に継続的に作用している可能性のある場合を意味している。このままでは、補正噴射制御が繰り返し行われることになるため、エンジン7に掛かる負担が大変大きく、エンジン7故障の原因になりかねない。
【0076】
そこで、ステップS15にて算出された負荷率Zが設定負荷率Z0以上であれば(S16:YES)、補正噴射制御の反復実行を防止するために、そのまま補正噴射制御ルーチンを抜けて、通常の燃料噴射制御に戻る。一方、ステップS15にて算出された負荷率Zが設定負荷率未満であれば(S16:NO)、次いで、ステップS1にて読み込まれたエンジン回転数Nの目標値Nsと、前回行われた補正噴射制御のステップS12にてRAM102cに記憶させたエンジン回転数Nの目標値Ns(x)とが同じか否かを判別する(ステップS17)。
【0077】
目標値Nsと前回記憶させた目標値Ns(x)とが同じであれば(S17:YES)、ステップS16YESの場合と同様に、エンジン7の出力トルクより大きな負荷がエンジン7に継続的に作用しているという可能性があるため、そのまま補正噴射制御ルーチンを抜けて、通常の燃料噴射制御に戻る。目標値Nsと前回記憶させた目標値Ns(x)とが異なっていれば(S17:NO)、次いで、ステップS15にて算出された負荷率Zと、前回行われた補正噴射制御のステップS12にてRAM102cに記憶させたエンジン7の負荷率Z(x)とが同じか否かを判別する(ステップS18)。
【0078】
負荷率Zと前回記憶させた負荷率Z(x)とが同じであれば(S18:YES)、ステップS16YES,S17YESの場合と同様に、エンジン7の出力トルクより大きな負荷がエンジン7に継続的に作用しているという可能性があるため、そのまま補正噴射制御ルーチンを抜けて、通常の燃料噴射制御に戻る。負荷率Zと前回記憶させた負荷率Z(x)とが異なっていれば(S18:NO)、前述したステップS5へ移行して、最大ラック位置線Rmaxの低速回転域に当る部分を補正ラック位置線Rmodに一時的に切り換える補正を実行するのである。
【0079】
上記の説明から分かるように、第1実施例では、エンジン7の始動後において少なくとも1回は補正噴射制御を実行したことがあれば、ステップS15〜S18の工程を経ることによって、補正噴射制御の反復実行を防止し、エンジン7の保護を図っている。
【0080】
以上の構成によると、エンジン7の低速回転中にエンジン負荷の増大にてエンジン回転数Nが低下した場合は、エンジン7の低速回転域での最大燃料噴射量が増大するように、出力特性マップMPを一時的に補正するものであるから(ステップS5参照)、エンジン7の低速回転中に、例えば油圧等に起因してエンジン7に掛かる負荷が増大しても、最大燃料噴射量(最大ラック位置)を一時的に引き上げて、エンジン7の出力トルクを増大できる。従って、トルク不足に起因するエンジン回転数Nの低下をなくして、黒煙及びノッキングの発生を防止できると共に、エンジンストールのおそれを抑制できる。
【0081】
また、エンジン回転数Nの低下率Dが設定低下率D0(所定値)以上であると、出力特性マップMPの一時的な補正を実行するものであるから(ステップS3〜S5参照)、走行装置2の加速によるエンジン7負荷の増大を例えば油圧等に起因した負荷増大であると誤認することを防止できる。また、掘削等の作業時に、出力特性マップMPの最大ラック位置線Rmaxに沿ってエンジン回転数Nが低下したとしても、かかる回転数低下を例えば油圧等に起因した負荷増大であると誤認するおそれもなくなる。従って、補正噴射制御(出力特性マップMPの一時的な補正)を適切に実行できる。
【0082】
更に、出力特性マップMPを一時的に補正した後は、設定時間T0が経過すると出力特性マップMPを元の状態に戻すように構成されているから(ステップS9参照)、補正噴射制御の実行時間を短くして、エンジン7に負担が掛かる時間を制限でき、エンジン7の保護に寄与している。特に第1実施例では、出力特性マップMPを一時的に補正した後に、設定時間T0の経過とエンジン回転数Nの目標値Nsへの復帰とのうちいずれかが先に成立すると、出力特性マップMPを元の状態に戻すように構成されているから(ステップS7〜S9参照)、エンジン7に掛かる負担をより短い時間に制限でき、エンジン7保護の点で効果が高い。
【0083】
しかも、出力特性マップMPを元の状態に戻す場合は、補正ラック位置線Rmodを下向きに徐々(段階的)に平行移動させ、最終的には、最大ラック位置線Rmaxにおける低速回転域の状態を補正前の元の状態に戻すというように、低速回転域での最大燃料噴射量(最大ラック位置)を減らす方向に徐々に移行させるから(ステップS10参照)、最大燃料噴射量(最大ラック位置)のアンダーシュートを防止して元の状態にスムーズに復帰できる。また、最大燃料噴射量(最大ラック位置)が急激に減少したりしないので、エンジン7駆動中の安全性も確保できる。
【0084】
第1実施例では、出力特性マップMPを元の状態に戻した後において、ラック位置センサ109の検出情報から得られるエンジン7の負荷率Zが設定負荷率Z0(規定値)以上であると、出力特性マップMPの一時的な補正の実行を禁止するように構成されているから(ステップS16参照)、エンジン7の出力トルクより大きな負荷(例えば油圧に起因する負荷)がエンジン7に継続的に作用する可能性のある場合に、補正噴射制御の反復実行を防止でき、この点でもエンジン7の保護に寄与している。
【0085】
また、出力特性マップMPを元の状態に戻した後において、エンジン回転数Nの目標値Nsが補正前の値Ns(x)から変わらない場合や、エンジン7の負荷率Zが補正前の値Z(x)から変わらない場合も、出力特性マップMPの一時的な補正の実行を禁止するように構成されているから(ステップS17,S18参照)、これらの場合においても、補正噴射制御の反復実行を防止でき、エンジン7保護の点で有効である。
【0086】
(5).補正噴射制御の別例
図7〜図9には補正噴射制御の別例を示している。これら別例における補正噴射制御の態様は、基本的に前述の第1実施例と同様であるが、出力特性マップMPの一時的な補正を実行する判断基準が第1実施例の場合(エンジン回転数Nの低下率D)と異なっている。
【0087】
図7のフローチャートは補正噴射制御の第2実施例を示しており、以下に、第1実施例との相違点について説明する。第2実施例の補正噴射制御では、まず、エンジン回転センサ108にて検出されたエンジン回転数Nの実測値Niと、実測値Niに対応した燃料噴射量(ラック位置R)の実測値Raと、エンジン回転数Nの目標値Nsと、設定負荷率Z0とを読み込む(ステップS21)。
【0088】
次いで、エンジン回転数Nの実測値Niがローアイドル回転数未満か否かを判別する(ステップS22)。第2実施例のローアイドル回転数は例えば1000rpm程度に設定されている。エンジン回転数Nの実測値Niがローアイドル回転数以上であれば(S22:NO)、エンジン7の出力トルクが不足する事態は生じないので、そのまま補正噴射制御ルーチンを抜けて、通常の燃料噴射制御に戻る。
【0089】
エンジン回転数Nの実測値Niがローアイドル回転数未満であれば(S22:YES)、次いで、エンジン回転数Nの目標値Nsと実測値Niとの差(Ns−Ni)が設定回転数N0(所定値)以上であるか否かを判別する(ステップS23)。なお、設定回転数N0は、電子ガバナコントローラ102のROM102b等に記憶させる等して予め設定されている。エンジン回転数Nの目標値Nsと実測値Niとの差が設定回転数N0未満であれば(S23:NO)、この場合もエンジン7の出力トルクが不足することはないので、そのまま補正噴射制御ルーチンを抜けて、通常の燃料噴射制御に戻る。
【0090】
エンジン回転数Nの目標値Nsと実測値Niとの差が設定回転数N0以上であれば(S23:NO)、エンジン7の低速回転中に、エンジン7に掛かる負荷が増大してエンジン回転数Nが低下した状態であるので、このままでは、油圧ポンプモータ31や油圧ポンプ32の負荷増大に対してエンジン7の出力トルクが追従できずに不足することになる。そこで、以下は、前述した第1実施例の補正噴射制御(ステップS4〜S18)と同様の手順であるステップS24〜S38の工程を経るのである。
【0091】
このような制御を実行した場合も、第1実施例と同様の作用効果を奏することになる。すなわち、エンジン回転数Nの実測値Niがローアイドル回転数未満の値であり、且つ、エンジン回転数Nの目標値Nsと実測値Niとの差が設定回転数N0(所定値)以上であると、出力特性マップMPの一時的な補正を実行するものであるから、かかる補正を実行する判断基準がエンジン回転数Nの低下率Dである第1実施例の場合と同様に、補正噴射制御(出力特性マップMPの一時的な補正)を適切に実行できる。
【0092】
図8のフローチャートは補正噴射制御の第3実施例を示しており、以下に、第1及び第2実施例との相違点について説明する。第3実施例の補正噴射制御では、まず、第1油圧センサ121にて検出された作動油の油圧実測値P1と、第2油圧センサ122にて検出された作動油の油圧実測値P2とを適宜短時間毎に読み込むと共に、ラック位置センサ109にて検出された燃料噴射量(ラック位置R)の実測値Raと、エンジン回転数Nの目標値Nsと、設定負荷率Z0とを読み込む(ステップS41)。
【0093】
次いで、第1油圧センサ121に関して、先に読み込まれた油圧実測値P1(1)と、後に読み込まれた油圧実測値P1(2)とから、油圧ポンプモータ31側の油圧変化率ΔP1を算出すると共に、第2油圧センサ122に関して、先に読み込まれた油圧実測値P2(1)と、後に読み込まれた油圧実測値P2(2)とから、油圧ポンプ32側の油圧変化率ΔP2を算出する(ステップS42)。
【0094】
ここで、油圧変化率ΔP1,ΔP2とは、先の油圧実測値P1(1),P2(1)と後の油圧実測値P1(2),P2(2)との差を先の油圧実測値P1(1),P2(1)で割った値の百分率で表したものである。すなわち、ΔP1={(P1(1)−P1(2)}/P1(1)×100、ΔP2={(P2(1)−P2(2)}/P2(1)×100と表される。
【0095】
次いで、ステップS32にて算出された油圧変化率ΔP1,ΔP2のいずれか一方が設定変化率ΔP0(所定値)以上であるか否かを判別する(ステップS43)。なお、設定変化率ΔP0は、電子ガバナコントローラ102のROM102b等に記憶させる等して予め設定されている。油圧変化率ΔP1,ΔP2の少なくとも一方が設定変化率ΔP0未満であれば(S43:NO)、この場合もエンジン7の出力トルクが不足することはないので、そのまま補正噴射制御ルーチンを抜けて、通常の燃料噴射制御に戻る。
【0096】
油圧変化率ΔP1,ΔP2の少なくとも一方が設定変化率ΔP0以上であれば(S43:YES)、エンジン7の低速回転中に、エンジン7に掛かる負荷が増大してエンジン回転数Nが低下した状態であるので、このままでは、油圧ポンプモータ31や油圧ポンプ32の負荷増大に対してエンジン7の出力トルクが追従できずに不足することになる。そこで、以下は、前述した第1実施例の補正噴射制御(ステップS4〜S18)と同様の手順であるステップS44〜S58の工程を経るのである。
【0097】
このような制御を実行した場合も、第1及び第2実施例と同様の作用効果を奏することになる。特に、各ポンプ31,32から供給される作動油の油圧変化率ΔP1,ΔP2の少なくとも一方が設定変化率ΔP0(所定値)以上であると、出力特性マップMPの一時的な補正を実行するものであるから、例えば油圧等に起因した負荷増大の検出タイミングを、各ポンプ31,32からの作動油の油圧変化率ΔP1,ΔP2から把握することになる。このため、エンジン回転数Nを基準にして検出タイミングを計る第1及び第2実施例の場合よりも素早い判別が可能になり、補正噴射制御に要する時間を短縮できる。
【0098】
図9のフローチャートは補正噴射制御の第4実施例を示しており、以下に、第1〜第3実施例との相違点について説明する。第4実施例の補正噴射制御では、まず、発電量センサ112にて検出されたオルタネータ111の発電量実測値Eiを適宜短時間毎に読み込むと共に、ラック位置センサ109にて検出された燃料噴射量(ラック位置R)の実測値Raと、エンジン回転数Nの目標値Nsと、設定負荷率Z0とを読み込む(ステップS61)。
【0099】
次いで、先に読み込まれた発電量実測値Ei(1)と、後に読み込まれた発電量実測値Ei(2)とから、オルタネータ111の出力変化率ΔEを算出する(ステップS62)。ここで、出力変化率ΔEとは、先の発電量実測値Ei(1)と後の発電量実測値Ei(2)との差を先の発電量実測値Ei(1)で割った値の百分率で表したものである。すなわち、ΔE={(Ei(1)−Ei(2)}/Ei(1)×100と表される。
【0100】
次いで、ステップS62にて算出された出力変化率ΔEが基準変化率ΔE0(所定値)以上であるか否かを判別する(ステップS63)。なお、基準変化率ΔE0は、電子ガバナコントローラ102のROM102b等に記憶させる等して予め設定されている。出力変化率ΔEが基準変化率ΔE0未満であれば(S63:NO)、この場合もエンジン7の出力トルクが不足することはないので、そのまま補正噴射制御ルーチンを抜けて、通常の燃料噴射制御に戻る。
【0101】
出力変化率ΔEが基準変化率ΔE0以上であれば(S63:YES)、エンジン7の低速回転中に、エンジン7に掛かる負荷が増大してエンジン回転数Nが低下した状態であるので、このままでは、油圧ポンプモータ31や油圧ポンプ32の負荷増大に対してエンジン7の出力トルクが追従できずに不足することになる。そこで、以下は、前述した第1実施例の補正噴射制御(ステップS4〜S18)と同様の手順であるステップS64〜S78の工程を経るのである。
【0102】
このような制御を実行した場合も、第1〜第3実施例と同様の作用効果を奏することになる。特に、オルタネータ111の出力変化率ΔEが基準変化率ΔE0(所定値)以上であると、出力特性マップMPの一時的な補正を実行するものであるから、例えば油圧等に起因した負荷増大の検出タイミングを、オルタネータ111の出力変化率ΔEから把握することになる。このため、エンジン回転数Nを基準にして検出タイミングを計る第1及び第2実施例の場合よりも素早い判別が可能になり、第3実施例の場合と同様に、補正噴射制御に要する時間を短縮できるのである。
【0103】
(6).その他
本願発明は、前述の実施形態に限らず、様々な態様に具体化できる。例えば本願発明はバックホウに限らず、コンバイン等の農作業機や、ホイルローダ等の特殊作業用車両にも適用可能である。その他、各部の構成は図示の実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々変更が可能である。
【符号の説明】
【0104】
1 作業機械としてのバックホウ
7 エンジン
10 作業部
31 油圧源としての油圧ポンプモータ
32 油圧源としての油圧ポンプ
101 制御手段としての本機コントローラ
102 制御手段としての電子ガバナコントローラ
106 燃料噴射ポンプ
107 電子ガバナ
108 回転数検出手段としてのエンジン回転センサ
109 負荷検出手段としてのラック位置センサ
121 第1油圧センサ
122 第2油圧センサ
【特許請求の範囲】
【請求項1】
エンジンと、前記エンジンに燃料を噴射する燃料噴射装置と、エンジン回転数を検出する回転数検出手段と、エンジン回転数と燃料噴射量との関係を示す制御パターンを予め記憶させた記憶手段と、前記制御パターンに基づいて前記燃料噴射装置の作動を制御する制御手段とを備えているエンジン制御装置において、
前記エンジンの低速回転中にエンジン負荷の増大にてエンジン回転数が低下した場合は、前記エンジンの低速回転域での最大燃料噴射量が増大するように、前記制御パターンを一時的に補正して、前記補正した制御パターンに基づき燃料噴射量を制御する補正噴射制御を実行する構成であって、
前記制御パターンの一時的な補正実行の可否を、前記エンジンの動力にて駆動する油圧源から供給される作動油の油圧に基づき決定する、
エンジン制御装置。
【請求項2】
前記油圧源からの作動油の油圧変化率が予め設定した設定油圧率以上である場合に、前記制御パターンの一時的な補正を許可する、
請求項1に記載のエンジン装置。
【請求項3】
前記エンジンの始動後に前記補正噴射制御を1回以上実行した場合において、前記エンジンの負荷を検出する負荷検出手段から得られるエンジンの負荷率が規定値以上のときは、前記制御パターンの一時的な補正を行わず前記補正噴射制御を実行しない、
請求項2に記載のエンジン装置。
【請求項4】
前記エンジンの始動後に前記補正噴射制御を1回以上実行した場合において、前記エンジン回転数の前記目標値が補正前の値から変化しないときは、前記制御パターンの一時的な補正を行わず前記補正噴射制御を実行しない、
請求項2に記載のエンジン装置。
【請求項5】
前記エンジンの始動後に前記補正噴射制御を1回以上実行した場合において、前記エンジンの前記負荷率が補正前の値から変化しないときは、前記制御パターンの一時的な補正を行わず前記補正噴射制御を実行しない、
請求項2に記載のエンジン装置。
【請求項1】
エンジンと、前記エンジンに燃料を噴射する燃料噴射装置と、エンジン回転数を検出する回転数検出手段と、エンジン回転数と燃料噴射量との関係を示す制御パターンを予め記憶させた記憶手段と、前記制御パターンに基づいて前記燃料噴射装置の作動を制御する制御手段とを備えているエンジン制御装置において、
前記エンジンの低速回転中にエンジン負荷の増大にてエンジン回転数が低下した場合は、前記エンジンの低速回転域での最大燃料噴射量が増大するように、前記制御パターンを一時的に補正して、前記補正した制御パターンに基づき燃料噴射量を制御する補正噴射制御を実行する構成であって、
前記制御パターンの一時的な補正実行の可否を、前記エンジンの動力にて駆動する油圧源から供給される作動油の油圧に基づき決定する、
エンジン制御装置。
【請求項2】
前記油圧源からの作動油の油圧変化率が予め設定した設定油圧率以上である場合に、前記制御パターンの一時的な補正を許可する、
請求項1に記載のエンジン装置。
【請求項3】
前記エンジンの始動後に前記補正噴射制御を1回以上実行した場合において、前記エンジンの負荷を検出する負荷検出手段から得られるエンジンの負荷率が規定値以上のときは、前記制御パターンの一時的な補正を行わず前記補正噴射制御を実行しない、
請求項2に記載のエンジン装置。
【請求項4】
前記エンジンの始動後に前記補正噴射制御を1回以上実行した場合において、前記エンジン回転数の前記目標値が補正前の値から変化しないときは、前記制御パターンの一時的な補正を行わず前記補正噴射制御を実行しない、
請求項2に記載のエンジン装置。
【請求項5】
前記エンジンの始動後に前記補正噴射制御を1回以上実行した場合において、前記エンジンの前記負荷率が補正前の値から変化しないときは、前記制御パターンの一時的な補正を行わず前記補正噴射制御を実行しない、
請求項2に記載のエンジン装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−100823(P2013−100823A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2013−13133(P2013−13133)
【出願日】平成25年1月28日(2013.1.28)
【分割の表示】特願2008−212610(P2008−212610)の分割
【原出願日】平成20年8月21日(2008.8.21)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成25年1月28日(2013.1.28)
【分割の表示】特願2008−212610(P2008−212610)の分割
【原出願日】平成20年8月21日(2008.8.21)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
[ Back to top ]