
エンジン制御装置
【課題】車線変更または右左折に際して燃費を向上可能なエンジン制御装置を提供する。
【解決手段】車両1の車線変更または右左折を予測する予測部14と、車両1が渋滞区間に位置しているかを判定する判定部15と、予測部14が車両1の車線変更または右左折を予測すると共に、判定部15が、車両1が渋滞区間に位置していると判定する場合、アイドリングストップを実施する制御部16とを備える。これにより、渋滞区間での車線変更または右左折に際して、アイドリングストップの実施を許可して、車線変更または右左折を実際に行うまでアイドリングストップを実施することで、燃費を向上することができる。
【解決手段】車両1の車線変更または右左折を予測する予測部14と、車両1が渋滞区間に位置しているかを判定する判定部15と、予測部14が車両1の車線変更または右左折を予測すると共に、判定部15が、車両1が渋滞区間に位置していると判定する場合、アイドリングストップを実施する制御部16とを備える。これにより、渋滞区間での車線変更または右左折に際して、アイドリングストップの実施を許可して、車線変更または右左折を実際に行うまでアイドリングストップを実施することで、燃費を向上することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エンジン制御装置に関する。
【背景技術】
【0002】
近年、燃費向上、排気ガス抑制などを図るために、実質的に停車状態にある車両のエンジンを停止する、いわゆるアイドリングストップ技術が広く普及している。この技術に関連して、例えば特開2009−264289号公報には、右左折のための停車時にアイドリングストップの実施を禁止し、車両の始動性を確保することが開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−264289号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、車線変更または右左折のための停車時には、必ずしも車両の始動性が要求される訳ではない。つまり、交通の流れが緩やかとなる渋滞区間では、アイドリングストップ状態からエンジンを始動した後でも車線変更または右左折を十分に行うことができる。このため、車線変更または右左折のための停車時に一律にアイドリングストップの実施を禁止すると、燃費向上などを十分に図ることができなくなってしまう。
【0005】
そこで、本発明は、車線変更または右左折に際して燃費を向上可能なエンジン制御装置を提供しようとするものである。
【課題を解決するための手段】
【0006】
本発明に係るエンジン制御装置は、車両の車線変更または右左折を予測する予測部と、車両が渋滞区間に位置しているかを判定する判定部と、予測部が車両の車線変更または右左折を予測すると共に、判定部が、車両が渋滞区間に位置していると判定する場合、アイドリングストップを実施する制御部とを備える。
【0007】
本発明によれば、車両の車線変更または右左折を予測すると共に、車両が渋滞区間に位置していると判定すると、アイドリングストップを実施する。これにより、渋滞区間での車線変更または右左折に際して、車線変更または右左折を実際に行うまでアイドリングストップを実施することで、燃費を向上することができる。
【0008】
また、制御部は、車両の車線変更または右左折を予測するが、車両が渋滞区間以外に位置していると判定する場合、アイドリングストップの実施を抑制してもよい。これにより、渋滞区間以外での車線変更または右左折に際して、車線変更または右左折を実際に行うまで車両の始動性を確保することができる。
【発明の効果】
【0009】
本発明によれば、車線変更または右左折に際して燃費を向上可能なエンジン制御装置を提供することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の実施形態に係るエンジン制御装置の構成を示すブロック図である。
【図2】エンジン制御装置の動作を示すフロー図である。
【図3】渋滞区間および渋滞区間以外での車両の車線変更状況を対比して示す図である。
【図4】渋滞区間および渋滞区間以外での車両の右折状況を対比して示す図である。
【図5】渋滞区間および渋滞区間以外での車両の左折状況を対比して示す図である。
【発明を実施するための形態】
【0011】
以下、添付図面を参照して、本発明の実施形態を詳細に説明する。なお、図面の説明において同一の要素には同一の符号を付し、重複する説明を省略する。
【0012】
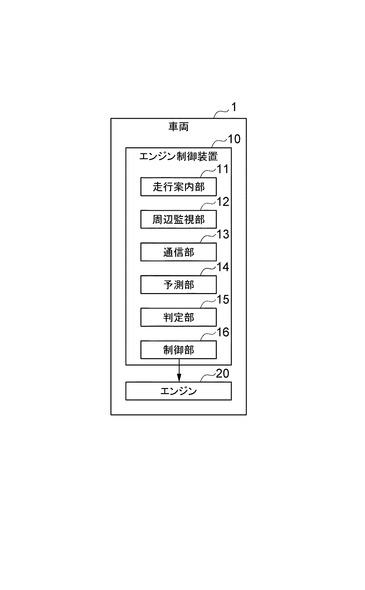
まず、図1を参照して、本発明の実施形態に係るエンジン制御装置10の構成について説明する。図1は、本発明の実施形態に係るエンジン制御装置10の構成を示すブロック図である。エンジン制御装置10は、渋滞区間での車線変更または右左折に際して燃費を向上するための装置である。
【0013】
図1に示すように、エンジン制御装置10は、走行案内部11、周辺監視部12、通信部13、予測部14、判定部15、制御部16を有する。これらの要素は、プログラムなどのソフトウェア、電子回路などのハードウェア、またはこれらの組合せとして実現される。
【0014】
走行案内部11は、GPS(Ground Positioning System)情報および地図情報を用いて、車両1の走行を案内する。走行案内部11は、車両1の現在位置、車両周辺の道路状況(交差路・進入路の有無、信号機の有無、走行車線の構成など)などを特定する。
【0015】
周辺監視部12は、カメラ、レーダ(不図示)などのセンサを用いて、車両1の周辺状況を監視する。周辺監視部12は、車両周辺の他の車両2(他の車両の総称)との相対距離、相対速度などに関する情報を取得する。
【0016】
通信部13は、路上通信施設、交通センター(不図示)などとの無線通信を通じて、車両周辺の交通情報を取得する。通信部13は、車両周辺の信号情報、渋滞情報などを車線毎に取得する。
【0017】
予測部14は、車両1の車線変更または右左折を予測する。予測部14は、例えば、交通情報、速度信号、ウィンカ信号、アクセル開度、地図情報などに基づいて、車両1の車線変更または右左折を予測する。予測部14は、例えば、右または左ウィンカ(不図示)がオンされ、しかもアクセルがオンされていない場合、地図情報に基づいて、車両1の車線変更または右左折を予測する。
【0018】
判定部15は、車両1が渋滞区間に位置しているかを判定する。判定部15は、例えば、交通情報、地図情報、および周辺状況に基づいて、車両1が渋滞区間に位置しているかを判定する。
【0019】
判定部15は、例えば、まず、交通情報に基づいて、広域的な観点から車両1が渋滞区間に位置している可能性を判定する。そして、渋滞区間に位置している可能性がある場合、判定部15は、例えば、地図情報、周辺状況に基づいて、局所的な観点から車両1が渋滞区間に位置している可能性を判定する。
【0020】
判定部15は、車線変更が予測される場合、例えば、車線変更先の車線で車両1の前後の所定距離d(5m前後の距離)内に他の車両2が存在するかを判定する。判定部15は、右折が予測される場合、例えば、右車線で車両1の前後距離d内に他の車両2が存在するかを判定する。判定部15は、左折が予測される場合、例えば、走行車線で車両1の前後距離d内に他の車両2が存在するかを判定する。
【0021】
そして、判定部15は、車線変更または右左折が予測される場合、例えば、所定距離d内に存在する他の車両2の速度が所定値vt(渋滞区間での走行速度に相当)未満であるかを判定する。なお、所定距離dおよび所定値vtは、車線変更、右折、または左折のそれぞれで異なる値に設定されてもよい。
【0022】
制御部16は、予測部14の予測結果および判定部15の判定結果に応じて、エンジン20のアイドリングストップの実施を制御する。アイドリングストップを実施すると、実質的に停車状態にある車両のエンジンが停止する。制御部16は、車線変更または右左折が予測されると共に、車両1が渋滞区間に位置していると判定される場合、アイドリングストップの実施を許可する。一方、制御部16は、車線変更または右左折が予測されるが、車両1が渋滞区間以外に位置していると判定される場合、アイドリングストップの実施を抑制する。なお、アイドリングストップの実施の許可および抑制とは、実質的に停車状態にある車両1のエンジンの停止を許可すること、および許可しないこと(または禁止すること)をそれぞれに意味する。
【0023】
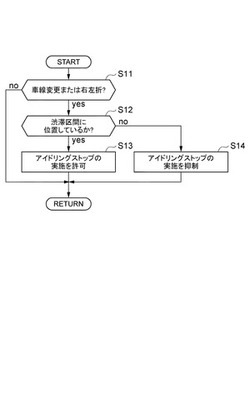
つぎに、図2から図5を参照して、エンジン制御装置10の動作について説明する。図2は、車線変更時または右左折時におけるエンジン制御装置10の動作を示すフロー図である。エンジン制御装置10は、図2に示す処理を所定の周期で繰り返し行う。なお、以下の処理は、車両1の走行状態を予め判定し、車両1が実質的に停車していると判定された場合にのみ行われてもよい。
【0024】
図2に示すように、予測部14は、車両1の車線変更または右左折を予測する(ステップS11)。予測部14は、例えば、以下のような手順で車線変更または右左折を予測する。
【0025】
予測部14は、右または左ウィンカがオンされているかを判定し、ウィンカがオンされている場合、アクセルがオンされていないかをさらに判定する。アクセルがオンされていない場合、予測部14は、ウィンカが倒された側で、車両1の進行方向に近接して交差路、進入路が存在しないかを判定する。そして、予測部14は、交差路、進入路が存在しない場合に車両1の車線変更を予測し、存在する場合に車両1の右折または左折を予測する。
【0026】
なお、ウィンカがオンされていない場合、エンジン制御装置10は、一連の処理を終了する。また、アクセルがオンされている場合、制御部16は、アイドリングストップの実施を抑制し(ステップS14)、エンジン制御装置10は、一連の処理を終了する。
【0027】
ステップS11で車線変更または右左折が予測されると、判定部15は、車両1が渋滞区間に位置しているかを判定する(ステップS12)。判定部15は、例えば、以下のような手順で渋滞区間に位置しているかを判定する。
【0028】
まず、ステップS11で車線変更が予測された場合について説明する。車線変更が予測された場合、判定部15は、車線変更先の車線(右または左車線)が渋滞している可能性を判定する。渋滞している可能性がある場合、判定部15は、車線変更先の車線で車両1の前後距離d内に他の車両2が存在するかを判定し、他の車両2が存在する場合、他の車両2の速度が所定値vt未満であるかをさらに判定する。そして、判定部15は、他の車両2の速度が所定値vt未満である場合に車両1が渋滞区間に位置していると判定し、所定値vt以上である場合に車両1が渋滞区間に位置していないと判定する。
【0029】
つぎに、ステップS11で右折または左折が予測された場合について説明する。右折が予測された場合、判定部15は、右車線が渋滞している可能性を判定し、渋滞している可能性がある場合、右車線で車両1の前後距離d内に他の車両2が存在するかをさらに判定する。一方、左折が予測された場合、判定部15は、現在の走行車線が渋滞している可能性を判定し、渋滞している可能性がある場合、現在の走行車線で車両1の前後距離d内に他の車両2が存在するかをさらに判定する。
【0030】
該当車線が渋滞している可能性があり、車両1の前後距離d内に他の車両2が存在すると判定された場合、判定部15は、他の車両2の速度が所定値vt未満であるかを判定する。そして、判定部15は、他の車両2の速度が所定値vt未満である場合に車両1が渋滞区間に位置していると判定し、所定値vt以上である場合に車両1が渋滞区間に位置していないと判定する。
【0031】
ステップS12で渋滞区間に位置していると判定されると、制御部16は、アイドリングストップの実施を許可する(ステップS13)。一方、ステップS12で渋滞区間に位置していると判定されないと、つまり、渋滞区間外に位置していると判定されると、制御部16は、アイドリングストップの実施を抑制する(ステップS14)。そして、アイドリングストップの実施を許可している場合、制御部16は、車両1が実質的に停車すると、アイドリングストップを実施して車両1のエンジン20を停止させる。一方、アイドリングストップの実施を抑制している場合、制御部16は、車両1が実質的に停車しても、アイドリングストップを実施せず、車両1のエンジン20を停止させない。
【0032】
なお、ステップS12で判定条件に該当しない場合も、制御部16は、アイドリングストップの実施を抑制する(ステップS14)。ステップS11で判定条件に該当しない場合、またはステップS13またはS14を実行すると、エンジン制御装置10は、一連の処理を終了する。
【0033】
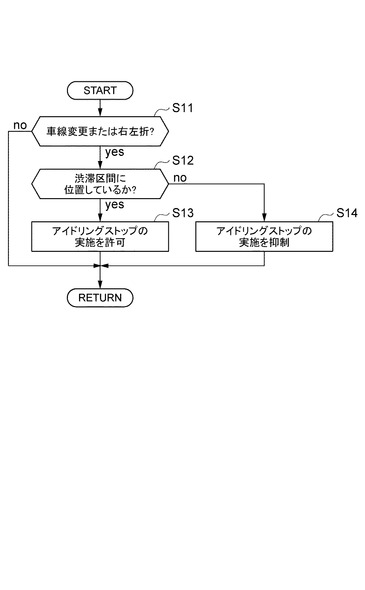
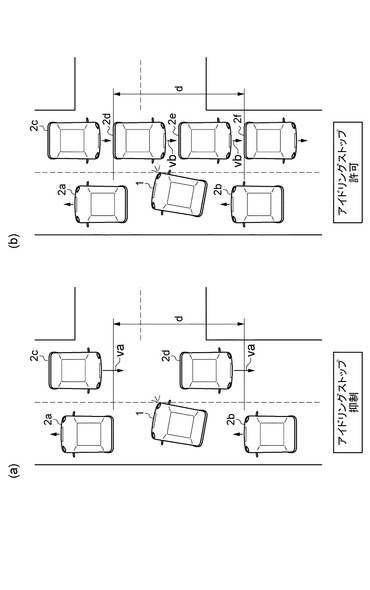
図3には、渋滞区間および渋滞区間以外での車両1の車線変更状況が示されている。図3では、右車線への車線変更の状況が示されているが、左車線への車線変更の状況についても同様に説明される。
【0034】
図3(a)に示すように、渋滞区間以外での車線変更時には、車線変更先の右車線で交通の流れが速いので(他の車両2dの速度vaが所定値vt以上であるので)、アイドリングストップ状態からエンジン20を始動すると車線変更を十分に行えない場合がある。よって、アイドリングストップの実施を抑制することで、車線変更を実際に行うまで車両1の始動性を確保することができる。
【0035】
一方、図3(b)に示すように、渋滞区間での車線変更時には、車線変更先の車線で交通の流れが遅いので(他の車両2d、2eの速度vbが所定値vt未満であるので)、アイドリングストップ状態からエンジン20を始動した後でも車線変更を十分に行うことができる。よって、アイドリングストップの実施を許可して、車線変更を実際に行うまでアイドリングストップを実施することで、燃費を向上することができる。
【0036】
図4には、渋滞区間および渋滞区間以外での車両1の右折状況が示されている。図4(a)に示すように、渋滞区間以外での右折時には、右車線で交通の流れが速いので(他の車両2dの速度vaが所定値vt以上であるので)、アイドリングストップ状態からエンジン20を始動すると右折を十分に行えない場合がある。よって、アイドリングストップの実施を抑制することで、右折を実際に行うまで車両1の始動性を確保することができる。
【0037】
一方、図4(b)に示すように、渋滞区間での右折時には、右車線で交通の流れが遅いので(他の車両2e、2fの速度vbが所定値vt未満であるので)、アイドリングストップ状態からエンジン20を始動した後でも右折を十分に行うことができる。よって、アイドリングストップの実施を許可して、右折を実際に行うまでアイドリングストップを実施することで、燃費を向上することができる。
【0038】
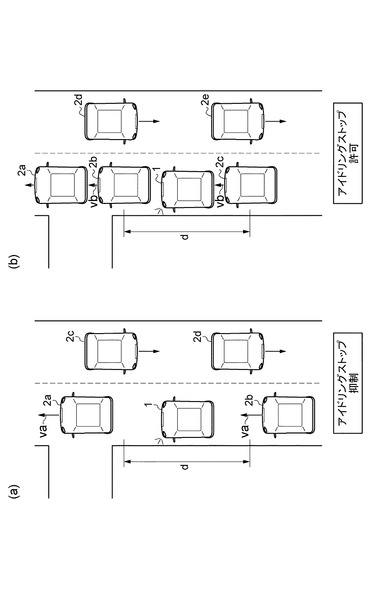
図5には、渋滞区間および渋滞区間以外での車両1の左折状況が示されている。図5(a)に示すように、渋滞区間以外での左折時には、走行車線で交通の流れが速いので(前後距離d内に他の車2が存在しないので)、アイドリングストップ状態からエンジン20を始動すると、後続する他の車両2の走行を妨害してしまう場合がある。よって、アイドリングストップの実施を抑制することで、左折を実際に行うまで車両1の始動性を確保することができる。
【0039】
一方、図5(b)に示すように、渋滞区間での左折時には、走行車線で交通の流れが遅いので(他の車両2b、2cの速度vbが所定値vt未満であるので)、アイドリングストップ状態からエンジン20を始動した後でも左折を十分に行うことができる。よって、アイドリングストップの実施を許可して、左折を実際に行うまでアイドリングストップを実施することで、燃費を向上することができる。
【0040】
以上説明したように、本発明の実施形態に係るエンジン制御装置10によれば、予測部14が車両1の車線変更または右左折を予測すると共に、判定部15が、車両1が渋滞区間に位置していると判定すると、制御部16が、アイドリングストップを実施する。これにより、渋滞区間での車線変更または右左折に際して、車線変更または右左折を実際に行うまでアイドリングストップを実施することで、燃費を向上することができる。
【0041】
また、渋滞区間以外での車線変更または右左折に際して、アイドリングストップの実施を抑制することで、車線変更または右左折を実際に行うまで車両1の始動性を確保することができる。
【0042】
なお、前述した実施形態は、本発明に係るエンジン制御装置10の最良な実施形態を説明したものであり、本発明に係るエンジン制御装置10は、本実施形態に記載したものに限定されるものではない。本発明に係るエンジン制御装置10は、各請求項に記載した発明の要旨を逸脱しない範囲で本実施形態に係るエンジン制御装置10を変形し、または他のものに適用したものであってもよい。
【0043】
また、本発明は、前述した方法に従って、渋滞区間での車線変更または右左折に際して燃費を向上するためのプログラム、または当該プログラムを記憶しているコンピュータ読取可能な記録媒体にも同様に適用できる。
【符号の説明】
【0044】
1…車両、2…他の車両、10…エンジン制御装置、11…走行案内部、12…周辺監視部、13…通信部、14…予測部、15…判定部、16…制御部、20…エンジン。
【技術分野】
【0001】
本発明は、エンジン制御装置に関する。
【背景技術】
【0002】
近年、燃費向上、排気ガス抑制などを図るために、実質的に停車状態にある車両のエンジンを停止する、いわゆるアイドリングストップ技術が広く普及している。この技術に関連して、例えば特開2009−264289号公報には、右左折のための停車時にアイドリングストップの実施を禁止し、車両の始動性を確保することが開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−264289号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、車線変更または右左折のための停車時には、必ずしも車両の始動性が要求される訳ではない。つまり、交通の流れが緩やかとなる渋滞区間では、アイドリングストップ状態からエンジンを始動した後でも車線変更または右左折を十分に行うことができる。このため、車線変更または右左折のための停車時に一律にアイドリングストップの実施を禁止すると、燃費向上などを十分に図ることができなくなってしまう。
【0005】
そこで、本発明は、車線変更または右左折に際して燃費を向上可能なエンジン制御装置を提供しようとするものである。
【課題を解決するための手段】
【0006】
本発明に係るエンジン制御装置は、車両の車線変更または右左折を予測する予測部と、車両が渋滞区間に位置しているかを判定する判定部と、予測部が車両の車線変更または右左折を予測すると共に、判定部が、車両が渋滞区間に位置していると判定する場合、アイドリングストップを実施する制御部とを備える。
【0007】
本発明によれば、車両の車線変更または右左折を予測すると共に、車両が渋滞区間に位置していると判定すると、アイドリングストップを実施する。これにより、渋滞区間での車線変更または右左折に際して、車線変更または右左折を実際に行うまでアイドリングストップを実施することで、燃費を向上することができる。
【0008】
また、制御部は、車両の車線変更または右左折を予測するが、車両が渋滞区間以外に位置していると判定する場合、アイドリングストップの実施を抑制してもよい。これにより、渋滞区間以外での車線変更または右左折に際して、車線変更または右左折を実際に行うまで車両の始動性を確保することができる。
【発明の効果】
【0009】
本発明によれば、車線変更または右左折に際して燃費を向上可能なエンジン制御装置を提供することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の実施形態に係るエンジン制御装置の構成を示すブロック図である。
【図2】エンジン制御装置の動作を示すフロー図である。
【図3】渋滞区間および渋滞区間以外での車両の車線変更状況を対比して示す図である。
【図4】渋滞区間および渋滞区間以外での車両の右折状況を対比して示す図である。
【図5】渋滞区間および渋滞区間以外での車両の左折状況を対比して示す図である。
【発明を実施するための形態】
【0011】
以下、添付図面を参照して、本発明の実施形態を詳細に説明する。なお、図面の説明において同一の要素には同一の符号を付し、重複する説明を省略する。
【0012】
まず、図1を参照して、本発明の実施形態に係るエンジン制御装置10の構成について説明する。図1は、本発明の実施形態に係るエンジン制御装置10の構成を示すブロック図である。エンジン制御装置10は、渋滞区間での車線変更または右左折に際して燃費を向上するための装置である。
【0013】
図1に示すように、エンジン制御装置10は、走行案内部11、周辺監視部12、通信部13、予測部14、判定部15、制御部16を有する。これらの要素は、プログラムなどのソフトウェア、電子回路などのハードウェア、またはこれらの組合せとして実現される。
【0014】
走行案内部11は、GPS(Ground Positioning System)情報および地図情報を用いて、車両1の走行を案内する。走行案内部11は、車両1の現在位置、車両周辺の道路状況(交差路・進入路の有無、信号機の有無、走行車線の構成など)などを特定する。
【0015】
周辺監視部12は、カメラ、レーダ(不図示)などのセンサを用いて、車両1の周辺状況を監視する。周辺監視部12は、車両周辺の他の車両2(他の車両の総称)との相対距離、相対速度などに関する情報を取得する。
【0016】
通信部13は、路上通信施設、交通センター(不図示)などとの無線通信を通じて、車両周辺の交通情報を取得する。通信部13は、車両周辺の信号情報、渋滞情報などを車線毎に取得する。
【0017】
予測部14は、車両1の車線変更または右左折を予測する。予測部14は、例えば、交通情報、速度信号、ウィンカ信号、アクセル開度、地図情報などに基づいて、車両1の車線変更または右左折を予測する。予測部14は、例えば、右または左ウィンカ(不図示)がオンされ、しかもアクセルがオンされていない場合、地図情報に基づいて、車両1の車線変更または右左折を予測する。
【0018】
判定部15は、車両1が渋滞区間に位置しているかを判定する。判定部15は、例えば、交通情報、地図情報、および周辺状況に基づいて、車両1が渋滞区間に位置しているかを判定する。
【0019】
判定部15は、例えば、まず、交通情報に基づいて、広域的な観点から車両1が渋滞区間に位置している可能性を判定する。そして、渋滞区間に位置している可能性がある場合、判定部15は、例えば、地図情報、周辺状況に基づいて、局所的な観点から車両1が渋滞区間に位置している可能性を判定する。
【0020】
判定部15は、車線変更が予測される場合、例えば、車線変更先の車線で車両1の前後の所定距離d(5m前後の距離)内に他の車両2が存在するかを判定する。判定部15は、右折が予測される場合、例えば、右車線で車両1の前後距離d内に他の車両2が存在するかを判定する。判定部15は、左折が予測される場合、例えば、走行車線で車両1の前後距離d内に他の車両2が存在するかを判定する。
【0021】
そして、判定部15は、車線変更または右左折が予測される場合、例えば、所定距離d内に存在する他の車両2の速度が所定値vt(渋滞区間での走行速度に相当)未満であるかを判定する。なお、所定距離dおよび所定値vtは、車線変更、右折、または左折のそれぞれで異なる値に設定されてもよい。
【0022】
制御部16は、予測部14の予測結果および判定部15の判定結果に応じて、エンジン20のアイドリングストップの実施を制御する。アイドリングストップを実施すると、実質的に停車状態にある車両のエンジンが停止する。制御部16は、車線変更または右左折が予測されると共に、車両1が渋滞区間に位置していると判定される場合、アイドリングストップの実施を許可する。一方、制御部16は、車線変更または右左折が予測されるが、車両1が渋滞区間以外に位置していると判定される場合、アイドリングストップの実施を抑制する。なお、アイドリングストップの実施の許可および抑制とは、実質的に停車状態にある車両1のエンジンの停止を許可すること、および許可しないこと(または禁止すること)をそれぞれに意味する。
【0023】
つぎに、図2から図5を参照して、エンジン制御装置10の動作について説明する。図2は、車線変更時または右左折時におけるエンジン制御装置10の動作を示すフロー図である。エンジン制御装置10は、図2に示す処理を所定の周期で繰り返し行う。なお、以下の処理は、車両1の走行状態を予め判定し、車両1が実質的に停車していると判定された場合にのみ行われてもよい。
【0024】
図2に示すように、予測部14は、車両1の車線変更または右左折を予測する(ステップS11)。予測部14は、例えば、以下のような手順で車線変更または右左折を予測する。
【0025】
予測部14は、右または左ウィンカがオンされているかを判定し、ウィンカがオンされている場合、アクセルがオンされていないかをさらに判定する。アクセルがオンされていない場合、予測部14は、ウィンカが倒された側で、車両1の進行方向に近接して交差路、進入路が存在しないかを判定する。そして、予測部14は、交差路、進入路が存在しない場合に車両1の車線変更を予測し、存在する場合に車両1の右折または左折を予測する。
【0026】
なお、ウィンカがオンされていない場合、エンジン制御装置10は、一連の処理を終了する。また、アクセルがオンされている場合、制御部16は、アイドリングストップの実施を抑制し(ステップS14)、エンジン制御装置10は、一連の処理を終了する。
【0027】
ステップS11で車線変更または右左折が予測されると、判定部15は、車両1が渋滞区間に位置しているかを判定する(ステップS12)。判定部15は、例えば、以下のような手順で渋滞区間に位置しているかを判定する。
【0028】
まず、ステップS11で車線変更が予測された場合について説明する。車線変更が予測された場合、判定部15は、車線変更先の車線(右または左車線)が渋滞している可能性を判定する。渋滞している可能性がある場合、判定部15は、車線変更先の車線で車両1の前後距離d内に他の車両2が存在するかを判定し、他の車両2が存在する場合、他の車両2の速度が所定値vt未満であるかをさらに判定する。そして、判定部15は、他の車両2の速度が所定値vt未満である場合に車両1が渋滞区間に位置していると判定し、所定値vt以上である場合に車両1が渋滞区間に位置していないと判定する。
【0029】
つぎに、ステップS11で右折または左折が予測された場合について説明する。右折が予測された場合、判定部15は、右車線が渋滞している可能性を判定し、渋滞している可能性がある場合、右車線で車両1の前後距離d内に他の車両2が存在するかをさらに判定する。一方、左折が予測された場合、判定部15は、現在の走行車線が渋滞している可能性を判定し、渋滞している可能性がある場合、現在の走行車線で車両1の前後距離d内に他の車両2が存在するかをさらに判定する。
【0030】
該当車線が渋滞している可能性があり、車両1の前後距離d内に他の車両2が存在すると判定された場合、判定部15は、他の車両2の速度が所定値vt未満であるかを判定する。そして、判定部15は、他の車両2の速度が所定値vt未満である場合に車両1が渋滞区間に位置していると判定し、所定値vt以上である場合に車両1が渋滞区間に位置していないと判定する。
【0031】
ステップS12で渋滞区間に位置していると判定されると、制御部16は、アイドリングストップの実施を許可する(ステップS13)。一方、ステップS12で渋滞区間に位置していると判定されないと、つまり、渋滞区間外に位置していると判定されると、制御部16は、アイドリングストップの実施を抑制する(ステップS14)。そして、アイドリングストップの実施を許可している場合、制御部16は、車両1が実質的に停車すると、アイドリングストップを実施して車両1のエンジン20を停止させる。一方、アイドリングストップの実施を抑制している場合、制御部16は、車両1が実質的に停車しても、アイドリングストップを実施せず、車両1のエンジン20を停止させない。
【0032】
なお、ステップS12で判定条件に該当しない場合も、制御部16は、アイドリングストップの実施を抑制する(ステップS14)。ステップS11で判定条件に該当しない場合、またはステップS13またはS14を実行すると、エンジン制御装置10は、一連の処理を終了する。
【0033】
図3には、渋滞区間および渋滞区間以外での車両1の車線変更状況が示されている。図3では、右車線への車線変更の状況が示されているが、左車線への車線変更の状況についても同様に説明される。
【0034】
図3(a)に示すように、渋滞区間以外での車線変更時には、車線変更先の右車線で交通の流れが速いので(他の車両2dの速度vaが所定値vt以上であるので)、アイドリングストップ状態からエンジン20を始動すると車線変更を十分に行えない場合がある。よって、アイドリングストップの実施を抑制することで、車線変更を実際に行うまで車両1の始動性を確保することができる。
【0035】
一方、図3(b)に示すように、渋滞区間での車線変更時には、車線変更先の車線で交通の流れが遅いので(他の車両2d、2eの速度vbが所定値vt未満であるので)、アイドリングストップ状態からエンジン20を始動した後でも車線変更を十分に行うことができる。よって、アイドリングストップの実施を許可して、車線変更を実際に行うまでアイドリングストップを実施することで、燃費を向上することができる。
【0036】
図4には、渋滞区間および渋滞区間以外での車両1の右折状況が示されている。図4(a)に示すように、渋滞区間以外での右折時には、右車線で交通の流れが速いので(他の車両2dの速度vaが所定値vt以上であるので)、アイドリングストップ状態からエンジン20を始動すると右折を十分に行えない場合がある。よって、アイドリングストップの実施を抑制することで、右折を実際に行うまで車両1の始動性を確保することができる。
【0037】
一方、図4(b)に示すように、渋滞区間での右折時には、右車線で交通の流れが遅いので(他の車両2e、2fの速度vbが所定値vt未満であるので)、アイドリングストップ状態からエンジン20を始動した後でも右折を十分に行うことができる。よって、アイドリングストップの実施を許可して、右折を実際に行うまでアイドリングストップを実施することで、燃費を向上することができる。
【0038】
図5には、渋滞区間および渋滞区間以外での車両1の左折状況が示されている。図5(a)に示すように、渋滞区間以外での左折時には、走行車線で交通の流れが速いので(前後距離d内に他の車2が存在しないので)、アイドリングストップ状態からエンジン20を始動すると、後続する他の車両2の走行を妨害してしまう場合がある。よって、アイドリングストップの実施を抑制することで、左折を実際に行うまで車両1の始動性を確保することができる。
【0039】
一方、図5(b)に示すように、渋滞区間での左折時には、走行車線で交通の流れが遅いので(他の車両2b、2cの速度vbが所定値vt未満であるので)、アイドリングストップ状態からエンジン20を始動した後でも左折を十分に行うことができる。よって、アイドリングストップの実施を許可して、左折を実際に行うまでアイドリングストップを実施することで、燃費を向上することができる。
【0040】
以上説明したように、本発明の実施形態に係るエンジン制御装置10によれば、予測部14が車両1の車線変更または右左折を予測すると共に、判定部15が、車両1が渋滞区間に位置していると判定すると、制御部16が、アイドリングストップを実施する。これにより、渋滞区間での車線変更または右左折に際して、車線変更または右左折を実際に行うまでアイドリングストップを実施することで、燃費を向上することができる。
【0041】
また、渋滞区間以外での車線変更または右左折に際して、アイドリングストップの実施を抑制することで、車線変更または右左折を実際に行うまで車両1の始動性を確保することができる。
【0042】
なお、前述した実施形態は、本発明に係るエンジン制御装置10の最良な実施形態を説明したものであり、本発明に係るエンジン制御装置10は、本実施形態に記載したものに限定されるものではない。本発明に係るエンジン制御装置10は、各請求項に記載した発明の要旨を逸脱しない範囲で本実施形態に係るエンジン制御装置10を変形し、または他のものに適用したものであってもよい。
【0043】
また、本発明は、前述した方法に従って、渋滞区間での車線変更または右左折に際して燃費を向上するためのプログラム、または当該プログラムを記憶しているコンピュータ読取可能な記録媒体にも同様に適用できる。
【符号の説明】
【0044】
1…車両、2…他の車両、10…エンジン制御装置、11…走行案内部、12…周辺監視部、13…通信部、14…予測部、15…判定部、16…制御部、20…エンジン。
【特許請求の範囲】
【請求項1】
車両の車線変更または右左折を予測する予測部と、
前記車両が渋滞区間に位置しているかを判定する判定部と、
前記予測部が前記車両の車線変更または右左折を予測すると共に、前記判定部が、前記車両が渋滞区間に位置していると判定する場合、アイドリングストップを実施する制御部と、
を備えるエンジン制御装置。
【請求項2】
前記制御部は、前記予測部が前記車両の車線変更または右左折を予測するが、前記判定部が、前記車両が渋滞区間以外に位置していると判定する場合、アイドリングストップの実施を抑制する、請求項1に記載のエンジン制御装置。
【請求項1】
車両の車線変更または右左折を予測する予測部と、
前記車両が渋滞区間に位置しているかを判定する判定部と、
前記予測部が前記車両の車線変更または右左折を予測すると共に、前記判定部が、前記車両が渋滞区間に位置していると判定する場合、アイドリングストップを実施する制御部と、
を備えるエンジン制御装置。
【請求項2】
前記制御部は、前記予測部が前記車両の車線変更または右左折を予測するが、前記判定部が、前記車両が渋滞区間以外に位置していると判定する場合、アイドリングストップの実施を抑制する、請求項1に記載のエンジン制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−113274(P2013−113274A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−262543(P2011−262543)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]