
エンジン制御装置
【課題】慣性パワーを考慮して燃料の消費量を最適化したエンジンの動作点を決定する。
【解決手段】エンジンが発生すべき要求パワーPe_bsと、現時点のエンジン回転数Ne_nowと、の組み合わせに応じて、エンジンによる燃料消費量を最小とする次の制御時点におけるエンジン回転数Ne_next及びエンジントルクTe_nextの設定値を求める。
【解決手段】エンジンが発生すべき要求パワーPe_bsと、現時点のエンジン回転数Ne_nowと、の組み合わせに応じて、エンジンによる燃料消費量を最小とする次の制御時点におけるエンジン回転数Ne_next及びエンジントルクTe_nextの設定値を求める。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エンジン制御装置に関する。
【背景技術】
【0002】
従来からエンジン制御において、エンジン動作点(エンジンの回転速度とトルクの組み合わせ)を求める様々な方法が考えられている。
【0003】
特許文献1には、エンジン回転速度とエンジントルクとをパラメータとする等燃費曲線から、エンジンの要求パワー毎に燃費が最適となるエンジンの動作点(エンジン回転速度とエンジントルク)を求めて、それらの動作点を結んだ効率特性線を作成し、この効率特性線上で要求パワーを出力可能な動作点を要求動作点として算出し、この要求動作点に応じてエンジンの動作点を制御する方法が開示されている。
【0004】
また、特許文献2には、アップシフト指示がなされてエンジンの回転数を減少させる要求がなされたときには、エンジンの回転数の減少に伴って生じるエンジンを含む慣性系のイナーシャパワーに基づいて要求パワーPe*を制限し、エンジンの回転数の減少を伴って制限した要求パワーPe*がエンジンから出力されると共に入出力制限Win,Woutの範囲内で要求トルクTr*が駆動軸に出力されるようエンジンやモータを駆動制御する方法が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−56909号公報
【特許文献2】特開2008−179291号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、ハイブリッド自動車のように、バッテリ及びモータ・ジェネレータ等のエンジン以外の動力源を有する車両においてもエンジンを最適な燃費で駆動させるエンジン制御装置が望まれている。
【0007】
また、上記特許文献1の技術では、現在のエンジン回転速度に応じてエンジン等の駆動部分が有している慣性パワーが考慮されておらず、エンジンの回転数の変化やエンジンと同期して駆動されるモータ・ジェネレータ等の回転数変化による影響を考慮したエンジンの動作点の決定がなされていない。
【0008】
また、上記特許文献2の技術では、燃費の最適化については考慮されておらず、求められたエンジンの動作点では燃費が最適になるとは限らない。
【課題を解決するための手段】
【0009】
本発明は、将来の制御時点においてエンジンが走行や充電のために発生すべき要求パワーと、現時点のエンジン回転数と、の組み合わせに応じて、前記エンジンによる燃料消費量を最小とする前記制御時点におけるエンジン回転数及びエンジントルクの設定値を求めるエンジン制御装置である。
【0010】
例えば、前記要求パワーを算出する要求パワー演算手段と、前記現時点のエンジン回転数から前記制御時点のエンジン回転数への変更によって生ずる慣性トルクを含み、前記制御時点において前記エンジンが発生すべきトルクを要求トルクとして算出する要求トルク演算手段と、前記要求パワーと前記要求トルクとを満たすように前記制御時点におけるエンジン回転数及びエンジントルクを求めるエンジン動作点設定手段と、を備える構成とすることが好適である。
【0011】
また、前記要求パワー演算手段は、車両の走行のために利用される走行パワーを含む前記要求パワーを算出し、前記要求トルク演算手段は、前記車両の走行のために利用される走行トルクを含む前記要求トルクを算出する、ことが好適である。
【0012】
また、前記要求パワー演算手段は、前記車両の走行のために設けられたモータ・ジェネレータに接続されたバッテリの充放電パワーを含む前記要求パワーを算出し、前記要求トルク演算手段は、前記バッテリの充放電に関する充放電トルクを含む前記要求トルクを算出する、ことが好適である。
【0013】
また、前記慣性トルクは、前記現時点のエンジン回転数と前記制御時点のエンジン回転数との差に比例するように算出され、前記走行トルクと前記充放電トルクとの和は、前記要求パワーを前記制御時点のエンジン回転数で除算して算出される、ことが好適である。
【発明の効果】
【0014】
本発明によれば、慣性パワーを考慮して燃料の消費量を最適化したエンジンの動作点を決定することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施の形態における車両の構成を示す図である。
【図2】本発明の実施の形態におけるエンジン制御の方法を示すフローチャートである。
【図3】本発明の実施の形態におけるエンジン制御の方法を説明する図である。
【図4】エンジン回転数とエンジン要求パワーとの関係を示す図である。
【図5】エンジン回転数及びエンジントルクの組み合わせに対するエンジン動作点の決定方法を説明する図である。
【図6】本発明の変形例におけるエンジン制御のためのマップの例を示す図である。
【発明を実施するための形態】
【0016】
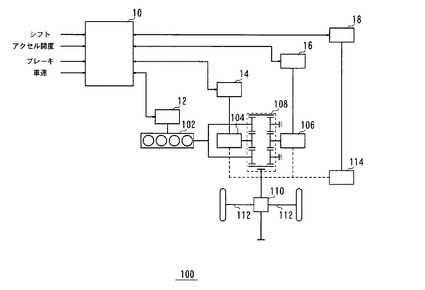
本発明の実施の形態における車両100は、図1に示すように、エンジン102,第1モータ・ジェネレータ(MG)104及び第2モータ・ジェネレータ(MG)106を駆動システムに含むハイブリッド自動車である。
【0017】
第1MG104及び第2MG106は、バッテリ114に接続される。エンジン102と第1MG104及び第2MG106とは、遊星ギア108及び差動歯車110を介して車両100の駆動軸112に接続され、車両100の駆動力を発生させる。また、第1MG104及び第2MG106は、駆動軸112を介して得られる回生エネルギーをバッテリ114へ供給する。
【0018】
車両100には、エンジン102、第1MG104、第2MG106及びバッテリ114を統合的に制御するためのハイブリッド電子制御部(HVECU)10が設けられる。HVECU10は、車両100に設けられたシフトレバー、アクセル、ブレーキ等の操作量や車速等の車両の駆動に関する情報を受けて、これらの情報に基づいてエンジン102、第1MG104、第2MG106及びバッテリ114を制御する。
【0019】
また、HVECU10は、エンジン電子制御部(エンジンECU)12、第1モータ・ジェネレータ電子制御部(第1MGECU)14、第2モータ・ジェネレータ電子制御部(第2MGECU)16及びバッテリ電子制御部(バッテリECU)18に接続される。エンジン102には、エンジン電子制御部(ECU)12が設けられる。エンジンECU12は、HVECU10からのエンジン動作点の設定情報を含むエンジン制御信号を受けて、エンジン制御信号に応じてエンジン102の動作を制御する。また、エンジンECU12は、エンジンの現在の回転数等のエンジン102に関するデータを取得し、HVECU10へ転送する。第1MGECU14は、HVECU10からの第1MG104の制御信号を受けて、その制御信号に応じて第1MG104の動作を制御する。また、第1MGECU14は、第1MG104の動作状況を示すデータを取得し、HVECU10へ転送する。第2MGECU16は、HVECU10からの第2MG106の制御信号を受けて、その制御信号に応じて第2MG106の動作を制御する。また、第2MGECU16は、第2MG106の動作状況を示すデータを取得し、HVECU10へ転送する。バッテリECU18は、HVECU10からのバッテリ114の制御信号を受けて、その制御信号に応じてバッテリ114を制御する。また、バッテリECU18は、バッテリ114の充放電状態(SOC)、出力電圧、出力電流等のデータを取得し、これらの情報及びこれらの情報から算出される充放電パワーを含む情報をHVECU10へ転送する。
【0020】
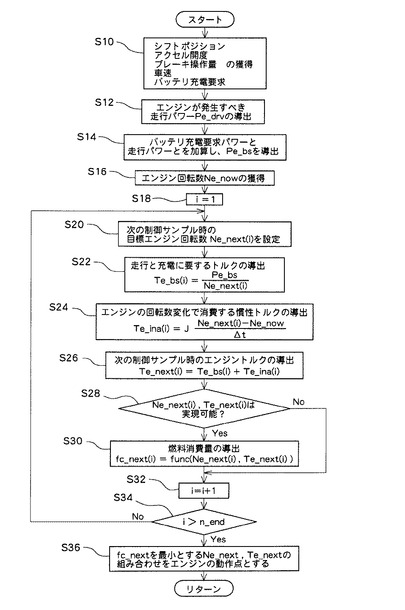
本実施の形態におけるHVECU10は、将来の制御時点においてエンジン102が発生すべき要求パワーPe_bsと、現時点のエンジン回転数Ne_nowとの組み合わせに応じてエンジン102による燃料消費量fc_nextを最小とするエンジン回転数Ne_next及びエンジントルクTe_nextの設定値を求める。以下、図2のフローチャートを参照して、エンジン102の動作点であるエンジン回転数Ne_next及びエンジントルクTe_nextの設定値を決定する処理について説明する。
【0021】
ステップS10では、エンジン102の動作点を決定するために必要なデータが取得される。HVECU10は、現時点のシフトレバーのポジション、アクセルの開度、ブレーキ操作量及び車速のデータを取得する。また、HVECU10は、バッテリECUから、バッテリ114で要求される充放電パワーPe_btを取得する。ここで、充放電パワーPe_btは、バッテリ114からの放電が要求されている場合には正の値を示し、バッテリ114への充電が要求されている場合には負の値を示すものとする。
【0022】
ステップS12では、エンジン102が発生すべき車両100の走行に利用されるパワーが走行パワーPe_drvとして算出される。HVECU10は、ステップS10で取得した現時点のシフトレバーのポジション、アクセルの開度、ブレーキ操作量及び車速のデータに基づいてエンジン102が発生すべき走行パワーPe_drvを算出する。
【0023】
ステップS14では、エンジン102が発生すべき要求基本パワーPe_bsが算出される。本実施の形態では、エンジン102が発生すべき要求基本パワーPe_bsは、車両の走行に利用される走行パワーPe_drvとバッテリ114で要求される充放電パワーPe_btとを加算した値となる。そこで、HVECU10は、走行パワーPe_drvと充放電パワーPe_btとを加算して要求基本パワーPe_bsを算出する。
【0024】
ステップS16では、現時点のエンジン回転数Ne_nowが取得される。HVECU10は、エンジンECU12から現時点のエンジン102の回転数をエンジン回転数Ne_nowとして取得する。
【0025】
ステップS18では、カウンタiの値が初期化される。カウンタiは、以下の処理においてエンジンの動作点を決定するための次の制御時点におけるエンジン回転数候補値Ne_next(i)及びエンジントルク候補値Te_next(i)を繰り返し算出する際に用いられる。
【0026】
繰り返し回数n_endは、エンジン回転数候補値Ne_next(i)がエンジン回転数Ne_nowに対して次の制御時点までの時間と、エンジン102の許容回転変化量から定められる範囲の全域に分布するように設定することが好適である。例えば、エンジン回転数の候補の範囲を±1000rpm、エンジン回転数候補値Ne_next(i)の変更ステップを100rpmとすると、繰り返し回数n_endは21となる。ただし、繰り返し回数n_endは、大きいことが望ましいが、現時点から次の制御時点までの時間間隔とHVECU10の処理能力とのバランスによって決定することが好適である。
【0027】
ステップS20では、次の制御時点のエンジン回転数候補値Ne_next(i)が設定される。HVECU10は、現時点のエンジン回転数Ne_nowを元に次の制御時点のエンジン回転数候補値Ne_next(i)を設定する。
【0028】
例えば、繰り返し回数n_endを21として、エンジン回転数候補値Ne_next(i)がエンジン回転数Ne_nowに対して±1000rpmの範囲まで広がって分布するように設定するには、変更ステップを100rpmとしてエンジン回転数候補値Ne_next(1)はエンジン回転数Ne_now−1000、エンジン回転数候補値Ne_next(2)はエンジン回転数Ne_now−900、・・・エンジン回転数候補値Ne_next(21)はエンジン回転数Ne_now+1000と設定すればよい。
【0029】
ステップS22では、車両100の走行パワーPe_drvとバッテリ114の充放電パワーPe_btとを考慮して、次の制御時点において車両100の走行とバッテリ114の充放電に必要な走行トルク及び充放電トルクの和が基本要求トルクTe_bs(i)として算出される。基本トルクTe_bs(i)は、数式(1)に示すように、基本要求パワーPe_bsをエンジン回転数候補値Ne_next(i)で除算して算出することができる。そこで、HVECU10は、ステップS14にて算出された要求基本パワーPe_bsをステップS20にて設定したエンジン回転数候補値Ne_next(i)で除算して基本トルクTe_bs(i)を算出する。
【0030】
【数1】

【0031】
ステップS24では、現時点のエンジン回転数Ne_nowから次の制御時点におけるエンジン回転数候補値Ne_next(i)への回転数の変化に伴って回転系の慣性モーメントによって消費又は獲得される慣性トルクTe_ina(i)が算出される。慣性トルクTe_ina(i)は、回転系の回転加速度に回転系の慣性モーメントJを乗算して算出される。ここで、回転系の回転加速度は、次の制御時点におけるエンジン回転数候補値Ne_next(i)と現時点のエンジン回転数Ne_nowとの回転数差を、現時点から次の制御時点までの時間間隔Δtで除算した値で近似できる。したがって、慣性トルクTe_ina(i)は、数式(2)によって算出できる。そこで、HVECU10は、数式(2)にしたがって慣性トルクTe_ina(i)を算出する。
【0032】
【数2】
【0033】
ステップS26では、次の制御時点においてエンジン102から発生すべきトルクがエンジントルクTe_next(i)として算出される。HVECU10は、数式(3)に示すように、ステップS22で算出された基本トルクTe_bs(i)とステップS24で算出された慣性トルクTe_ina(i)とを加算してエンジントルクTe_next(i)として算出する。
【0034】
【数3】
【0035】
ステップS28では、次の制御時点におけるエンジン回転数候補値Ne_next(i)とエンジントルクTe_next(i)とがエンジン102にて実現可能か否かが判断される。HVECU10は、内部又は外部に設けられている記憶部に格納されているエンジン102の諸元データを参照し、ステップS20で設定されたエンジン回転数候補値Ne_next(i)とステップS26で算出されたエンジントルクTe_next(i)とがエンジン102にて実現可能な値であるか否かを判定する。実現可能であれば処理をステップS30へ移行させ、そうでなければ処理をステップS32へ移行させる。
【0036】
ステップS30では、次の制御時点におけるエンジン102での燃料消費量fc_next(i)が算出される。燃料消費量fc_next(i)は、数式(4)に示すように、次の制御時点におけるエンジン回転数候補値Ne_next(i)とエンジントルクTe_next(i)との関数によって導出することができる。
【0037】
【数4】
【0038】
具体的には、エンジン102の回転数及び出力トルクの組み合わせ毎に燃料消費量を予め実験等により測定し、数式(4)のようにエンジン102の燃料消費量を回転数及び出力トルクの組み合わせの関数として表現しておけばよい。
【0039】
また、数式(4)のような関数を用いず、エンジン102の回転数及び出力トルクの組み合わせ毎に燃料消費量をマッピングしたデータベースを予め登録しておき、次の制御時点におけるエンジン回転数候補値Ne_next(i)とエンジントルクTe_next(i)に対応する燃料消費量をデータベースから抽出する方法を採用してもよい。
【0040】
ステップS32では、カウンタiの値を1つ増加させる。ステップS34では、カウンタiの値が繰り返し回数n_endを超えたか否かが判断される。HVECU10は、カウンタiの値が繰り返し回数n_endを超えた場合には処理をステップS36へ移行させ、そうでない場合には処理をステップS20へ戻し、次のカウンタiに対する処理を繰り返す。
【0041】
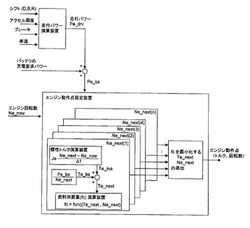
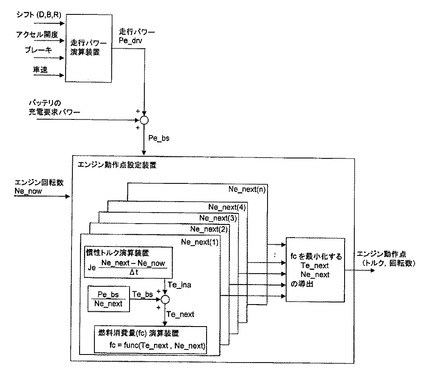
ステップS20からステップS32までの処理を繰り返すことによって、図3に示すように、次の制御時点における複数のエンジン回転数候補値Ne_next(i)及びエンジンが発生すべき要求パワーPe_bsの組み合わせ毎にエンジン102の燃料消費量の予測値fc_next(i)が算出される。
【0042】
ステップS36では、次の制御時点におけるエンジンの動作点が決定される。本実施の形態では、ステップS30で求められた燃料消費量fc_next(i)を最小とするエンジン回転数候補値Ne_next(i)とエンジントルクTe_next(i)とを次の制御時点におけるエンジンの動作点として選択する。
【0043】
HVECU10は、このようにして決定されたエンジン回転数候補値Ne_next(i)とエンジントルクTe_next(i)を次の制御時点におけるエンジンの動作点としてエンジン制御信号に含めてエンジンECU12へ送信する。エンジンECU12では、エンジン制御信号を受けて、エンジン制御信号で指定されたエンジン回転数候補値Ne_next(i)とエンジントルクTe_next(i)となるようにエンジン102の動作を制御する。
【0044】
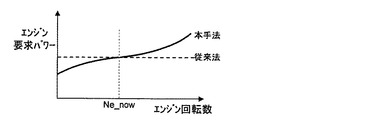
図4は、エンジン10の回転数に対するエンジン要求パワーの変化の様子を示す。図4の破線で示すように、従来のエンジン制御では慣性パワーが考慮されておらず、現時点のエンジン回転数Ne_nowに対するエンジン10の回転数の変化によって要求パワーが変化しないものとして処理が行われていた。これに対して、図4の実線で示すように、本実施の形態におけるエンジン制御では、現時点のエンジン回転数Ne_nowに対するエンジン10の回転数の変化に伴って要求パワーが変化するものとして処理が行われる。
【0045】
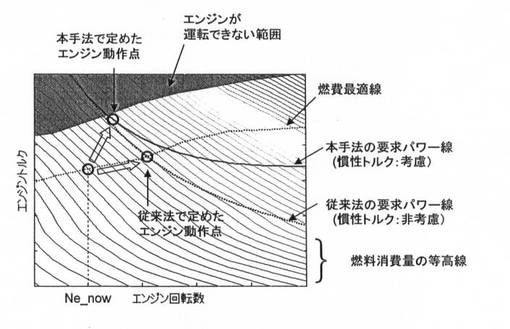
図5は、エンジン10の回転数とトルクとの関係から最適なエンジン10の動作点を求める方法を説明する図である。図5では、同じ燃料消費量となるエンジン動作点を結んで燃料消費量の等高線(細い実線)として示している。図5に示すように、従来のエンジン制御では、現時点のエンジン回転数Ne_nowに対して一意に決定される燃料最適線(点線)と、エンジン回転数変化に伴う慣性トルク(慣性パワー)の変化を考慮しない要求パワー線と、の交点を次のエンジン動作点として決定していた。これに対して、本実施の形態におけるエンジン制御では、エンジン回転数変化に伴う慣性トルク(慣性パワー)の変化を考慮した要求パワー線上において最も燃料消費量が少なくなる点を次のエンジン動作点として決定する。
【0046】
このような処理によって、慣性パワーを考慮して燃料の消費量を最適化した動作点でエンジン10を制御することができる。
<変形例>
【0047】
上記実施の形態では、複数のエンジン回転数候補値Ne_next(i)とエンジントルクTe_next(i)の組み合わせ毎にエンジン102の燃料消費量fc_next(i)を算出し、算出された燃料消費量fc_next(i)を最小とするエンジン回転数候補値Ne_next(i)とエンジントルクTe_next(i)をエンジン102の動作点として決定した。
【0048】
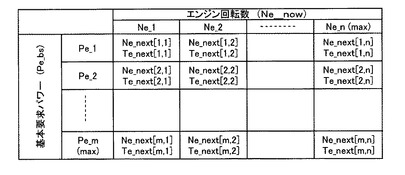
本変形例では、エンジン102の回転数及び出力パワーの組み合わせ毎に燃料消費量を最小とするエンジン動作点(エンジン回転数及びエンジントルク)の組み合わせを予め実験等により逐次探索して求め、図6に示すように、それらをマッピングしたデータベースを予め登録しておき、現在のエンジン回転数Ne_nowと要求基本パワーPe_bsとの組み合わせに対応するエンジン動作点(次の制御時点のエンジン回転数Ne_next及びエンジントルクTe_next)を決定する。
【0049】
例えば、現在のエンジン回転数Ne_nowがNe_1であり、基本要求パワーPe_bsがPe_1である場合に、図6のマップの例では、次の制御時点におけるエンジン回転数はNe_next[1,1]及びエンジントルクはTe_next[1,1]となる。また、マップに定義されていない条件については、動作点を補間して求めてもよい。
【0050】
本変形例によっても慣性パワーを考慮して燃料の消費量を最適化した動作点でエンジン102を制御することができる。
【0051】
なお、本発明の適用範囲は、ハイブリッド自動車に限定されるものではなく、将来の制御時点においてエンジンが発生すべきパワーを要求パワーと、現時点のエンジン回転数と、の組み合わせに応じて、エンジンによる燃料消費量を最小とする制御時点におけるエンジン回転数及びエンジントルクの設定値を求めるものであればよい。例えば、第1MG104及び第2MG106が設けられていない場合、充放電パワーPe_btを考慮しないで上記処理を行えばよい。
【技術分野】
【0001】
本発明は、エンジン制御装置に関する。
【背景技術】
【0002】
従来からエンジン制御において、エンジン動作点(エンジンの回転速度とトルクの組み合わせ)を求める様々な方法が考えられている。
【0003】
特許文献1には、エンジン回転速度とエンジントルクとをパラメータとする等燃費曲線から、エンジンの要求パワー毎に燃費が最適となるエンジンの動作点(エンジン回転速度とエンジントルク)を求めて、それらの動作点を結んだ効率特性線を作成し、この効率特性線上で要求パワーを出力可能な動作点を要求動作点として算出し、この要求動作点に応じてエンジンの動作点を制御する方法が開示されている。
【0004】
また、特許文献2には、アップシフト指示がなされてエンジンの回転数を減少させる要求がなされたときには、エンジンの回転数の減少に伴って生じるエンジンを含む慣性系のイナーシャパワーに基づいて要求パワーPe*を制限し、エンジンの回転数の減少を伴って制限した要求パワーPe*がエンジンから出力されると共に入出力制限Win,Woutの範囲内で要求トルクTr*が駆動軸に出力されるようエンジンやモータを駆動制御する方法が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−56909号公報
【特許文献2】特開2008−179291号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、ハイブリッド自動車のように、バッテリ及びモータ・ジェネレータ等のエンジン以外の動力源を有する車両においてもエンジンを最適な燃費で駆動させるエンジン制御装置が望まれている。
【0007】
また、上記特許文献1の技術では、現在のエンジン回転速度に応じてエンジン等の駆動部分が有している慣性パワーが考慮されておらず、エンジンの回転数の変化やエンジンと同期して駆動されるモータ・ジェネレータ等の回転数変化による影響を考慮したエンジンの動作点の決定がなされていない。
【0008】
また、上記特許文献2の技術では、燃費の最適化については考慮されておらず、求められたエンジンの動作点では燃費が最適になるとは限らない。
【課題を解決するための手段】
【0009】
本発明は、将来の制御時点においてエンジンが走行や充電のために発生すべき要求パワーと、現時点のエンジン回転数と、の組み合わせに応じて、前記エンジンによる燃料消費量を最小とする前記制御時点におけるエンジン回転数及びエンジントルクの設定値を求めるエンジン制御装置である。
【0010】
例えば、前記要求パワーを算出する要求パワー演算手段と、前記現時点のエンジン回転数から前記制御時点のエンジン回転数への変更によって生ずる慣性トルクを含み、前記制御時点において前記エンジンが発生すべきトルクを要求トルクとして算出する要求トルク演算手段と、前記要求パワーと前記要求トルクとを満たすように前記制御時点におけるエンジン回転数及びエンジントルクを求めるエンジン動作点設定手段と、を備える構成とすることが好適である。
【0011】
また、前記要求パワー演算手段は、車両の走行のために利用される走行パワーを含む前記要求パワーを算出し、前記要求トルク演算手段は、前記車両の走行のために利用される走行トルクを含む前記要求トルクを算出する、ことが好適である。
【0012】
また、前記要求パワー演算手段は、前記車両の走行のために設けられたモータ・ジェネレータに接続されたバッテリの充放電パワーを含む前記要求パワーを算出し、前記要求トルク演算手段は、前記バッテリの充放電に関する充放電トルクを含む前記要求トルクを算出する、ことが好適である。
【0013】
また、前記慣性トルクは、前記現時点のエンジン回転数と前記制御時点のエンジン回転数との差に比例するように算出され、前記走行トルクと前記充放電トルクとの和は、前記要求パワーを前記制御時点のエンジン回転数で除算して算出される、ことが好適である。
【発明の効果】
【0014】
本発明によれば、慣性パワーを考慮して燃料の消費量を最適化したエンジンの動作点を決定することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施の形態における車両の構成を示す図である。
【図2】本発明の実施の形態におけるエンジン制御の方法を示すフローチャートである。
【図3】本発明の実施の形態におけるエンジン制御の方法を説明する図である。
【図4】エンジン回転数とエンジン要求パワーとの関係を示す図である。
【図5】エンジン回転数及びエンジントルクの組み合わせに対するエンジン動作点の決定方法を説明する図である。
【図6】本発明の変形例におけるエンジン制御のためのマップの例を示す図である。
【発明を実施するための形態】
【0016】
本発明の実施の形態における車両100は、図1に示すように、エンジン102,第1モータ・ジェネレータ(MG)104及び第2モータ・ジェネレータ(MG)106を駆動システムに含むハイブリッド自動車である。
【0017】
第1MG104及び第2MG106は、バッテリ114に接続される。エンジン102と第1MG104及び第2MG106とは、遊星ギア108及び差動歯車110を介して車両100の駆動軸112に接続され、車両100の駆動力を発生させる。また、第1MG104及び第2MG106は、駆動軸112を介して得られる回生エネルギーをバッテリ114へ供給する。
【0018】
車両100には、エンジン102、第1MG104、第2MG106及びバッテリ114を統合的に制御するためのハイブリッド電子制御部(HVECU)10が設けられる。HVECU10は、車両100に設けられたシフトレバー、アクセル、ブレーキ等の操作量や車速等の車両の駆動に関する情報を受けて、これらの情報に基づいてエンジン102、第1MG104、第2MG106及びバッテリ114を制御する。
【0019】
また、HVECU10は、エンジン電子制御部(エンジンECU)12、第1モータ・ジェネレータ電子制御部(第1MGECU)14、第2モータ・ジェネレータ電子制御部(第2MGECU)16及びバッテリ電子制御部(バッテリECU)18に接続される。エンジン102には、エンジン電子制御部(ECU)12が設けられる。エンジンECU12は、HVECU10からのエンジン動作点の設定情報を含むエンジン制御信号を受けて、エンジン制御信号に応じてエンジン102の動作を制御する。また、エンジンECU12は、エンジンの現在の回転数等のエンジン102に関するデータを取得し、HVECU10へ転送する。第1MGECU14は、HVECU10からの第1MG104の制御信号を受けて、その制御信号に応じて第1MG104の動作を制御する。また、第1MGECU14は、第1MG104の動作状況を示すデータを取得し、HVECU10へ転送する。第2MGECU16は、HVECU10からの第2MG106の制御信号を受けて、その制御信号に応じて第2MG106の動作を制御する。また、第2MGECU16は、第2MG106の動作状況を示すデータを取得し、HVECU10へ転送する。バッテリECU18は、HVECU10からのバッテリ114の制御信号を受けて、その制御信号に応じてバッテリ114を制御する。また、バッテリECU18は、バッテリ114の充放電状態(SOC)、出力電圧、出力電流等のデータを取得し、これらの情報及びこれらの情報から算出される充放電パワーを含む情報をHVECU10へ転送する。
【0020】
本実施の形態におけるHVECU10は、将来の制御時点においてエンジン102が発生すべき要求パワーPe_bsと、現時点のエンジン回転数Ne_nowとの組み合わせに応じてエンジン102による燃料消費量fc_nextを最小とするエンジン回転数Ne_next及びエンジントルクTe_nextの設定値を求める。以下、図2のフローチャートを参照して、エンジン102の動作点であるエンジン回転数Ne_next及びエンジントルクTe_nextの設定値を決定する処理について説明する。
【0021】
ステップS10では、エンジン102の動作点を決定するために必要なデータが取得される。HVECU10は、現時点のシフトレバーのポジション、アクセルの開度、ブレーキ操作量及び車速のデータを取得する。また、HVECU10は、バッテリECUから、バッテリ114で要求される充放電パワーPe_btを取得する。ここで、充放電パワーPe_btは、バッテリ114からの放電が要求されている場合には正の値を示し、バッテリ114への充電が要求されている場合には負の値を示すものとする。
【0022】
ステップS12では、エンジン102が発生すべき車両100の走行に利用されるパワーが走行パワーPe_drvとして算出される。HVECU10は、ステップS10で取得した現時点のシフトレバーのポジション、アクセルの開度、ブレーキ操作量及び車速のデータに基づいてエンジン102が発生すべき走行パワーPe_drvを算出する。
【0023】
ステップS14では、エンジン102が発生すべき要求基本パワーPe_bsが算出される。本実施の形態では、エンジン102が発生すべき要求基本パワーPe_bsは、車両の走行に利用される走行パワーPe_drvとバッテリ114で要求される充放電パワーPe_btとを加算した値となる。そこで、HVECU10は、走行パワーPe_drvと充放電パワーPe_btとを加算して要求基本パワーPe_bsを算出する。
【0024】
ステップS16では、現時点のエンジン回転数Ne_nowが取得される。HVECU10は、エンジンECU12から現時点のエンジン102の回転数をエンジン回転数Ne_nowとして取得する。
【0025】
ステップS18では、カウンタiの値が初期化される。カウンタiは、以下の処理においてエンジンの動作点を決定するための次の制御時点におけるエンジン回転数候補値Ne_next(i)及びエンジントルク候補値Te_next(i)を繰り返し算出する際に用いられる。
【0026】
繰り返し回数n_endは、エンジン回転数候補値Ne_next(i)がエンジン回転数Ne_nowに対して次の制御時点までの時間と、エンジン102の許容回転変化量から定められる範囲の全域に分布するように設定することが好適である。例えば、エンジン回転数の候補の範囲を±1000rpm、エンジン回転数候補値Ne_next(i)の変更ステップを100rpmとすると、繰り返し回数n_endは21となる。ただし、繰り返し回数n_endは、大きいことが望ましいが、現時点から次の制御時点までの時間間隔とHVECU10の処理能力とのバランスによって決定することが好適である。
【0027】
ステップS20では、次の制御時点のエンジン回転数候補値Ne_next(i)が設定される。HVECU10は、現時点のエンジン回転数Ne_nowを元に次の制御時点のエンジン回転数候補値Ne_next(i)を設定する。
【0028】
例えば、繰り返し回数n_endを21として、エンジン回転数候補値Ne_next(i)がエンジン回転数Ne_nowに対して±1000rpmの範囲まで広がって分布するように設定するには、変更ステップを100rpmとしてエンジン回転数候補値Ne_next(1)はエンジン回転数Ne_now−1000、エンジン回転数候補値Ne_next(2)はエンジン回転数Ne_now−900、・・・エンジン回転数候補値Ne_next(21)はエンジン回転数Ne_now+1000と設定すればよい。
【0029】
ステップS22では、車両100の走行パワーPe_drvとバッテリ114の充放電パワーPe_btとを考慮して、次の制御時点において車両100の走行とバッテリ114の充放電に必要な走行トルク及び充放電トルクの和が基本要求トルクTe_bs(i)として算出される。基本トルクTe_bs(i)は、数式(1)に示すように、基本要求パワーPe_bsをエンジン回転数候補値Ne_next(i)で除算して算出することができる。そこで、HVECU10は、ステップS14にて算出された要求基本パワーPe_bsをステップS20にて設定したエンジン回転数候補値Ne_next(i)で除算して基本トルクTe_bs(i)を算出する。
【0030】
【数1】
【0031】
ステップS24では、現時点のエンジン回転数Ne_nowから次の制御時点におけるエンジン回転数候補値Ne_next(i)への回転数の変化に伴って回転系の慣性モーメントによって消費又は獲得される慣性トルクTe_ina(i)が算出される。慣性トルクTe_ina(i)は、回転系の回転加速度に回転系の慣性モーメントJを乗算して算出される。ここで、回転系の回転加速度は、次の制御時点におけるエンジン回転数候補値Ne_next(i)と現時点のエンジン回転数Ne_nowとの回転数差を、現時点から次の制御時点までの時間間隔Δtで除算した値で近似できる。したがって、慣性トルクTe_ina(i)は、数式(2)によって算出できる。そこで、HVECU10は、数式(2)にしたがって慣性トルクTe_ina(i)を算出する。
【0032】
【数2】
【0033】
ステップS26では、次の制御時点においてエンジン102から発生すべきトルクがエンジントルクTe_next(i)として算出される。HVECU10は、数式(3)に示すように、ステップS22で算出された基本トルクTe_bs(i)とステップS24で算出された慣性トルクTe_ina(i)とを加算してエンジントルクTe_next(i)として算出する。
【0034】
【数3】
【0035】
ステップS28では、次の制御時点におけるエンジン回転数候補値Ne_next(i)とエンジントルクTe_next(i)とがエンジン102にて実現可能か否かが判断される。HVECU10は、内部又は外部に設けられている記憶部に格納されているエンジン102の諸元データを参照し、ステップS20で設定されたエンジン回転数候補値Ne_next(i)とステップS26で算出されたエンジントルクTe_next(i)とがエンジン102にて実現可能な値であるか否かを判定する。実現可能であれば処理をステップS30へ移行させ、そうでなければ処理をステップS32へ移行させる。
【0036】
ステップS30では、次の制御時点におけるエンジン102での燃料消費量fc_next(i)が算出される。燃料消費量fc_next(i)は、数式(4)に示すように、次の制御時点におけるエンジン回転数候補値Ne_next(i)とエンジントルクTe_next(i)との関数によって導出することができる。
【0037】
【数4】
【0038】
具体的には、エンジン102の回転数及び出力トルクの組み合わせ毎に燃料消費量を予め実験等により測定し、数式(4)のようにエンジン102の燃料消費量を回転数及び出力トルクの組み合わせの関数として表現しておけばよい。
【0039】
また、数式(4)のような関数を用いず、エンジン102の回転数及び出力トルクの組み合わせ毎に燃料消費量をマッピングしたデータベースを予め登録しておき、次の制御時点におけるエンジン回転数候補値Ne_next(i)とエンジントルクTe_next(i)に対応する燃料消費量をデータベースから抽出する方法を採用してもよい。
【0040】
ステップS32では、カウンタiの値を1つ増加させる。ステップS34では、カウンタiの値が繰り返し回数n_endを超えたか否かが判断される。HVECU10は、カウンタiの値が繰り返し回数n_endを超えた場合には処理をステップS36へ移行させ、そうでない場合には処理をステップS20へ戻し、次のカウンタiに対する処理を繰り返す。
【0041】
ステップS20からステップS32までの処理を繰り返すことによって、図3に示すように、次の制御時点における複数のエンジン回転数候補値Ne_next(i)及びエンジンが発生すべき要求パワーPe_bsの組み合わせ毎にエンジン102の燃料消費量の予測値fc_next(i)が算出される。
【0042】
ステップS36では、次の制御時点におけるエンジンの動作点が決定される。本実施の形態では、ステップS30で求められた燃料消費量fc_next(i)を最小とするエンジン回転数候補値Ne_next(i)とエンジントルクTe_next(i)とを次の制御時点におけるエンジンの動作点として選択する。
【0043】
HVECU10は、このようにして決定されたエンジン回転数候補値Ne_next(i)とエンジントルクTe_next(i)を次の制御時点におけるエンジンの動作点としてエンジン制御信号に含めてエンジンECU12へ送信する。エンジンECU12では、エンジン制御信号を受けて、エンジン制御信号で指定されたエンジン回転数候補値Ne_next(i)とエンジントルクTe_next(i)となるようにエンジン102の動作を制御する。
【0044】
図4は、エンジン10の回転数に対するエンジン要求パワーの変化の様子を示す。図4の破線で示すように、従来のエンジン制御では慣性パワーが考慮されておらず、現時点のエンジン回転数Ne_nowに対するエンジン10の回転数の変化によって要求パワーが変化しないものとして処理が行われていた。これに対して、図4の実線で示すように、本実施の形態におけるエンジン制御では、現時点のエンジン回転数Ne_nowに対するエンジン10の回転数の変化に伴って要求パワーが変化するものとして処理が行われる。
【0045】
図5は、エンジン10の回転数とトルクとの関係から最適なエンジン10の動作点を求める方法を説明する図である。図5では、同じ燃料消費量となるエンジン動作点を結んで燃料消費量の等高線(細い実線)として示している。図5に示すように、従来のエンジン制御では、現時点のエンジン回転数Ne_nowに対して一意に決定される燃料最適線(点線)と、エンジン回転数変化に伴う慣性トルク(慣性パワー)の変化を考慮しない要求パワー線と、の交点を次のエンジン動作点として決定していた。これに対して、本実施の形態におけるエンジン制御では、エンジン回転数変化に伴う慣性トルク(慣性パワー)の変化を考慮した要求パワー線上において最も燃料消費量が少なくなる点を次のエンジン動作点として決定する。
【0046】
このような処理によって、慣性パワーを考慮して燃料の消費量を最適化した動作点でエンジン10を制御することができる。
<変形例>
【0047】
上記実施の形態では、複数のエンジン回転数候補値Ne_next(i)とエンジントルクTe_next(i)の組み合わせ毎にエンジン102の燃料消費量fc_next(i)を算出し、算出された燃料消費量fc_next(i)を最小とするエンジン回転数候補値Ne_next(i)とエンジントルクTe_next(i)をエンジン102の動作点として決定した。
【0048】
本変形例では、エンジン102の回転数及び出力パワーの組み合わせ毎に燃料消費量を最小とするエンジン動作点(エンジン回転数及びエンジントルク)の組み合わせを予め実験等により逐次探索して求め、図6に示すように、それらをマッピングしたデータベースを予め登録しておき、現在のエンジン回転数Ne_nowと要求基本パワーPe_bsとの組み合わせに対応するエンジン動作点(次の制御時点のエンジン回転数Ne_next及びエンジントルクTe_next)を決定する。
【0049】
例えば、現在のエンジン回転数Ne_nowがNe_1であり、基本要求パワーPe_bsがPe_1である場合に、図6のマップの例では、次の制御時点におけるエンジン回転数はNe_next[1,1]及びエンジントルクはTe_next[1,1]となる。また、マップに定義されていない条件については、動作点を補間して求めてもよい。
【0050】
本変形例によっても慣性パワーを考慮して燃料の消費量を最適化した動作点でエンジン102を制御することができる。
【0051】
なお、本発明の適用範囲は、ハイブリッド自動車に限定されるものではなく、将来の制御時点においてエンジンが発生すべきパワーを要求パワーと、現時点のエンジン回転数と、の組み合わせに応じて、エンジンによる燃料消費量を最小とする制御時点におけるエンジン回転数及びエンジントルクの設定値を求めるものであればよい。例えば、第1MG104及び第2MG106が設けられていない場合、充放電パワーPe_btを考慮しないで上記処理を行えばよい。
【特許請求の範囲】
【請求項1】
将来の制御時点においてエンジンが走行や充電のために発生すべき要求パワーと、現時点のエンジン回転数と、の組み合わせに応じて、前記エンジンによる燃料消費量を最小とする前記制御時点におけるエンジン回転数及びエンジントルクの設定値を求めるエンジン制御装置。
【請求項2】
請求項1に記載のエンジン制御装置であって、
前記要求パワーを算出する要求パワー演算手段と、
前記現時点のエンジン回転数から前記制御時点のエンジン回転数への変更によって生ずる慣性トルクを含み、前記制御時点において前記エンジンが発生すべきトルクを要求トルクとして算出する要求トルク演算手段と、
前記要求パワーと前記要求トルクとを満たすように前記制御時点におけるエンジン回転数及びエンジントルクを求めるエンジン動作点設定手段と、
を備えることを特徴とするエンジン制御装置。
【請求項3】
請求項2に記載のエンジン制御装置であって、
前記要求パワー演算手段は、車両の走行のために利用される走行パワーを含む前記要求パワーを算出し、
前記要求トルク演算手段は、前記車両の走行のために利用される走行トルクを含む前記要求トルクを算出する、
ことを特徴とするエンジン制御装置。
【請求項4】
請求項3に記載のエンジン制御装置であって、
前記要求パワー演算手段は、前記車両の走行のために設けられたモータ・ジェネレータに接続されたバッテリの充放電パワーを含む前記要求パワーを算出し、
前記要求トルク演算手段は、前記バッテリの充放電に関する充放電トルクを含む前記要求トルクを算出する、
ことを特徴とするエンジン制御装置。
【請求項5】
請求項4に記載のエンジン制御装置であって、
前記慣性トルクは、前記現時点のエンジン回転数と前記制御時点のエンジン回転数との差に比例するように算出され、
前記走行トルクと前記充放電トルクとの和は、前記要求パワーを前記制御時点のエンジン回転数で除算して算出される、
ことを特徴とするエンジン制御装置。
【請求項1】
将来の制御時点においてエンジンが走行や充電のために発生すべき要求パワーと、現時点のエンジン回転数と、の組み合わせに応じて、前記エンジンによる燃料消費量を最小とする前記制御時点におけるエンジン回転数及びエンジントルクの設定値を求めるエンジン制御装置。
【請求項2】
請求項1に記載のエンジン制御装置であって、
前記要求パワーを算出する要求パワー演算手段と、
前記現時点のエンジン回転数から前記制御時点のエンジン回転数への変更によって生ずる慣性トルクを含み、前記制御時点において前記エンジンが発生すべきトルクを要求トルクとして算出する要求トルク演算手段と、
前記要求パワーと前記要求トルクとを満たすように前記制御時点におけるエンジン回転数及びエンジントルクを求めるエンジン動作点設定手段と、
を備えることを特徴とするエンジン制御装置。
【請求項3】
請求項2に記載のエンジン制御装置であって、
前記要求パワー演算手段は、車両の走行のために利用される走行パワーを含む前記要求パワーを算出し、
前記要求トルク演算手段は、前記車両の走行のために利用される走行トルクを含む前記要求トルクを算出する、
ことを特徴とするエンジン制御装置。
【請求項4】
請求項3に記載のエンジン制御装置であって、
前記要求パワー演算手段は、前記車両の走行のために設けられたモータ・ジェネレータに接続されたバッテリの充放電パワーを含む前記要求パワーを算出し、
前記要求トルク演算手段は、前記バッテリの充放電に関する充放電トルクを含む前記要求トルクを算出する、
ことを特徴とするエンジン制御装置。
【請求項5】
請求項4に記載のエンジン制御装置であって、
前記慣性トルクは、前記現時点のエンジン回転数と前記制御時点のエンジン回転数との差に比例するように算出され、
前記走行トルクと前記充放電トルクとの和は、前記要求パワーを前記制御時点のエンジン回転数で除算して算出される、
ことを特徴とするエンジン制御装置。
【図1】

【図2】
【図3】
【図4】
【図6】
【図5】
【図2】
【図3】
【図4】
【図6】
【図5】
【公開番号】特開2013−2286(P2013−2286A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−130845(P2011−130845)
【出願日】平成23年6月13日(2011.6.13)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月13日(2011.6.13)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]