
エンジン回転制御モード切替方法及びエンジン回転制御装置
【課題】ドループ制御とアイソクロナス制御の円滑な切替を可能とする。
【解決手段】電子制御ユニット4は、ドループ制御、又は、アイソクロナス制御への切替要求が入力されたと判定された際(S104)、アイソクロナス制御において実行されるPID制御における積分項の値を、切替直前の目標燃料噴射量により初期化すると共に(S106)、切替直前のエンジン回転制御モードの実行時のアクセル開度におけるエンジン3の回転状態に対応するエンジン回転制御モード切替後におけるアクセル開度を疑似アクセル開度として所定の演算式により算出し(S108)、その算出された疑似アクセル開度が実際のアクセル開度を越えていると判定された場合に(S110)、エンジン回転制御モードの切替を行うと共に疑似アクセル開度を用いてアイソクロナス制御を実行するものとなっている(S112)。
【解決手段】電子制御ユニット4は、ドループ制御、又は、アイソクロナス制御への切替要求が入力されたと判定された際(S104)、アイソクロナス制御において実行されるPID制御における積分項の値を、切替直前の目標燃料噴射量により初期化すると共に(S106)、切替直前のエンジン回転制御モードの実行時のアクセル開度におけるエンジン3の回転状態に対応するエンジン回転制御モード切替後におけるアクセル開度を疑似アクセル開度として所定の演算式により算出し(S108)、その算出された疑似アクセル開度が実際のアクセル開度を越えていると判定された場合に(S110)、エンジン回転制御モードの切替を行うと共に疑似アクセル開度を用いてアイソクロナス制御を実行するものとなっている(S112)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両のエンジン回転制御に係り、特に、制御モードの切替における運転フィーリングの向上等を図ったものに関する。
【背景技術】
【0002】
農耕用車両や建築用車両などにおいては、エンジンの回転制御モードとして、エンジンの負荷変動に関わらず出力が一定となるようエンジン回転数を制御するアイソクロナス制御と、負荷に応じてエンジン回転数を変化させるドループ制御の2つの代表的な制御モードがあることは従来から知られているところである。
これらの制御モードは、車両に要求される特性や、車両ユーザの特質等を考慮していずれか適する一方の制御モードが搭載されるか、又は、双方の制御を選択的に切替可能に搭載されるかして用いられるのが基本であるが、これらの制御モードを基本にして、様々な観点から、より制御性の向上等のため方策が加えられたものなども提案されつつある(例えば、特許文献1等参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−110635号公報(第2−4頁、図1−図3)
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上述の2つの制御モードは、同一のアクセル開度に対する回転変動率が異なるため、2つの制御モードを切替可能に搭載した車両においては、その制御モードの切替の際に、トルク変動を招くと共に、吹け上がりや回転降下などのエンジン回転の変化が生ずるため、その変化を極力抑圧することが所望される。
【0005】
本発明は、上記実状に鑑みてなされたもので、ドループ制御とアイソクロナス制御の円滑な切替を可能とするエンジン回転制御モード切替方法及びエンジン回転制御装置を提供するものである。
【課題を解決するための手段】
【0006】
上記本発明の目的を達成するため、本発明に係るエンジン回転制御モード切替方法は、
内燃機関の動作制御を実行する電子制御ユニットが設けられ、ドループ制御とアイソクロナス制御のいずれか一方が所望に応じて選択、実行されて前記内燃機関の回転制御が可能に構成されてなるエンジン回転制御装置における前記ドループ制御と前記アイソクロナス制御との切替のためのエンジン回転制御モード切替方法であって、
前記ドループ制御から前記アイソクロナス制御へのエンジン回転制御モードの切替要求が生じた際、又は、前記アイソクロナス制御からドループ制御へのエンジン回転制御モードの切替要求が生じた際に、以下の処理を実行するに先立って、前記ドループ制御から前記アイソクロナス制御へのエンジン回転制御モードの切替要求が生じた際にのみ前記アイソクロナス制御において実行されるPID制御における積分項の値を、切替直前の目標燃料噴射量により初期化し、
しかる後、前記いずれかのエンジン回転制御モードの切替直前のエンジン回転制御モードの実行時のアクセル開度における前記内燃機関の回転状態に対応する、前記エンジン回転制御モードの切替後の制御状態におけるアクセル開度を疑似アクセル開度として所定の演算式により算出し、
次いで、前記算出された疑似アクセル開度が実際のアクセル開度を越えている場合に、前記エンジン回転制御モードの切替を行うと共に前記疑似アクセル開度を用いてエンジン回転制御を行い、切替後に、実際のアクセル開度が前記疑似アクセル開度を越えた場合には、実際のアクセル開度で前記切替後のエンジン回転制御モードによるエンジン回転制御を継続するよう構成されてなるものである。
また、上記本発明の目的を達成するため、本発明に係るエンジン回転制御装置は、
内燃機関の動作制御を実行する電子制御ユニットが設けられ、ドループ制御とアイソクロナス制御のいずれか一方が所望に応じて選択、実行されて前記内燃機関の回転制御が可能に構成されてなるエンジン回転制御装置であって、
前記電子制御ユニットは、前記ドループ制御から前記アイソクロナス制御へのエンジン回転制御モードの切替要求が生じたと判定された際、又は、前記アイソクロナス制御からドループ制御へのエンジン回転制御モードの切替要求が生じたと判定された際に、以下の処理を実行するに先立って、前記ドループ制御から前記アイソクロナス制御へのエンジン回転制御モードの切替要求が生じたと判定された際にのみ前記アイソクロナス制御において実行されるPID制御における積分項の値を、切替直前の目標燃料噴射量により初期化し、
しかる後、前記いずれかのエンジン回転制御モードの切替直前のエンジン回転制御モードの実行時のアクセル開度における前記内燃機関の回転状態に対応する、前記エンジン回転制御モードの切替後の制御状態におけるアクセル開度を疑似アクセル開度として所定の演算式により算出し、
次いで、前記算出された疑似アクセル開度が実際のアクセル開度を越えていると判定された場合に、前記エンジン回転制御モードの切替を行うと共に前記疑似アクセル開度を用いてエンジン回転制御を行い、切替後に、実際のアクセル開度が前記疑似アクセル開度を越えたと判定された場合には、実際のアクセル開度で前記切替後のエンジン回転制御モードによるエンジン回転制御を継続するよう構成されてなるものである。
【発明の効果】
【0007】
本発明によれば、エンジン回転制御モードの切替の際に、切替前のエンジン回転制御モードにおけるエンジン回転状態でエンジン回転制御モードの切替が行われるようにしたので、従来と異なり、エンジンの吹け上がりや回転降下などを招くことなく、運転フィーリングの悪化を招くことない円滑な切替が可能となるという効果を奏するものである。
【図面の簡単な説明】
【0008】
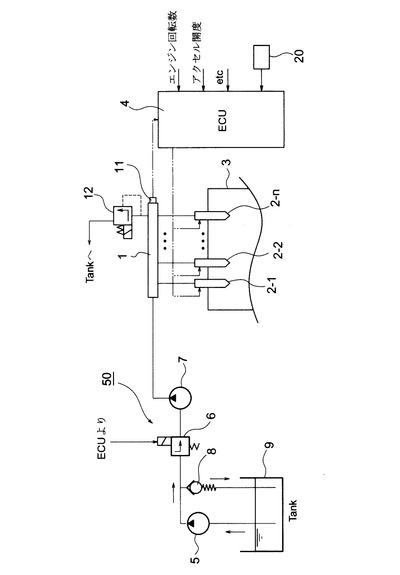
【図1】本発明の実施の形態におけるエンジン回転制御モード切替方法が適用されるコモンレール式燃料噴射制御装置の構成例を示す構成図である。
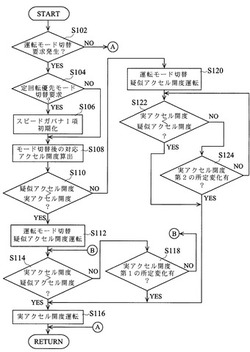
【図2】図1に示されたコモンレール式燃料噴射制御装置に用いられる電子制御ユニットにより実行される本発明の実施の形態におけるエンジン回転制御モード切替処理の手順を示すサブルーチンフローチャートである。
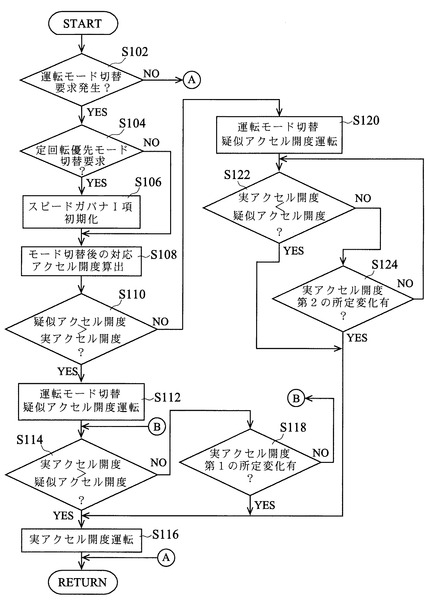
【図3】アイソクロナス制御におけるアクセル開度に対するエンジン回転数と燃料噴射量の関係を模式的に表した概略特性線図である
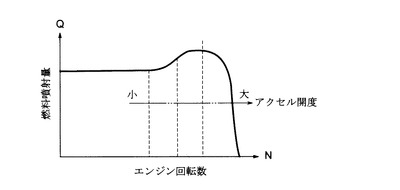
【図4】ドループ制御におけるアクセル開度に対するエンジン回転数と燃料噴射量の関係を模式的に表した概略特性線図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施の形態について、図1乃至図4を参照しつつ説明する。
なお、以下に説明する部材、配置等は本発明を限定するものではなく、本発明の趣旨の範囲内で種々改変することができるものである。
最初に、本発明の実施の形態におけるエンジン回転制御モード切替方法が適用される内燃機関噴射制御装置の構成について、図1を参照しつつ説明する。
この図1に示された内燃機関噴射制御装置は、具体的には、特に、コモンレール式燃料噴射制御装置が構成されたものとなっている。
【0010】
このコモンレール式燃料噴射制御装置は、高圧燃料の圧送を行う高圧ポンプ装置50と、この高圧ポンプ装置50により圧送された高圧燃料を蓄えるコモンレール1と、このコモンレール1から供給された高圧燃料をディーゼルエンジン(以下「エンジン」と称する)3の気筒へ噴射供給する複数の燃料噴射弁(インジェクタ)2−1〜2−nと、燃料噴射制御処理や後述する調量弁の駆動制御処理などを実行する電子制御ユニット(図1においては「ECU」と表記)4を主たる構成要素として構成されたものとなっている。
かかる構成自体は、従来から良く知られているこの種の燃料噴射制御装置の基本的な構成と同一のものである。
【0011】
高圧ポンプ装置50は、フィードポンプ5と、調量弁6と、燃料供給ポンプとしての高圧ポンプ7とを主たる構成要素として構成されてなる公知・周知の構成を有してなるものである。
かかる構成において、燃料タンク9の燃料は、フィードポンプ5により汲み上げられ、調量弁6を介して高圧ポンプ7へ供給されるようになっている。調量弁6には、電磁式比例制御弁が用いられ、その通電量が電子制御ユニット4に制御されることで、高圧ポンプ7への供給燃料の流量、換言すれば、高圧ポンプ7の吐出量が調整されるものとなっている。
【0012】
なお、フィードポンプ5の出力側と燃料タンク9との間には、戻し弁8が設けられており、フィードポンプ5の出力側の余剰燃料を燃料タンク9へ戻すことができるようになっている。
また、フィードポンプ5は、高圧ポンプ装置50の上流側に高圧ポンプ装置50と別体に設けるようにしても、また、燃料タンク9内に設けるようにしても良いものである。
【0013】
燃料噴射弁(インジェクタ)2−1〜2−nは、ディーゼルエンジン3の気筒毎に設けられており、それぞれコモンレール1から高圧燃料の供給を受け、電子制御ユニット4による噴射制御によって燃料噴射を行うようになっている。
本発明のコモンレール1には、余剰高圧燃料をタンク9へ戻すリターン通路(図示せず)に、電磁制御式の圧力制御弁12が設けられており、調量弁6と共にレール圧の制御に用いられるようになっている。
【0014】
電子制御ユニット4は、例えば、公知・周知の構成を有してなるマイクロコンピュータ(図示せず)を中心に、RAMやROM等の記憶素子(図示せず)を有すると共に、燃料噴射弁2−1〜2−nを駆動するための駆動回路(図示せず)や、調量弁6や圧力制御弁12への通電を行うための通電回路(図示せず)を主たる構成要素として構成されたものとなっている。
かかる電子制御ユニット4には、コモンレール1の圧力を検出する圧力センサ11の検出信号が入力される他、エンジン回転数やアクセル開度などの各種の検出信号が、エンジン3の動作制御や燃料噴射制御に供するために入力されるようになっている。
【0015】
本発明の実施の形態においては、後述するエンジン回転制御モードを切替るための切替入力回路20が設けられており、その出力信号は、電子制御ユニット4に入力され、制御モードの切り替処理に供されるようになっている。
切替入力回路20は、後述する2つのエンジン回転制御モードを選択するためのスイッチ(図示せず)を備え、そのスイッチにより選択された制御モードに応じた信号を電子制御ユニット4へ出力するよう構成されてなるものである。かかる機能を有する回路自体は、本発明特有のものではなく、様々の回路構成を採り得るものであるので、ここでの具体的な回路構成については、その詳細な説明を省略する。
【0016】
図2には、電子制御ユニット4により実行されるエンジン回転制御モード切替処理の手順がサブルーチンフローチャートに示されており、以下、同図を参照しつつ、その内容について説明する。
電子制御ユニット4による処理が開始されると、最初に、運転モード切替要求、換言すれば、エンジン回転制御モードの切替要求が発生したか否かが判定される(図2のステップS102参照)。
すなわち、本発明の実施の形態において、エンジン回転制御モードの切替は、切替入力回路20を車両ユーザが操作することで行われるものとなっており、”定回転優先モード”と、”負荷追従優先モード”の2つのモードの内、所望に応じて一方を選択可能となっている。
【0017】
ここで、”定回転優先モード”は、エンジン3の負荷変動に関わらず、エンジン回転数を一定に維持するための制御であり(図3参照)、いわゆるアイソクロナス制御と称されるエンジン回転制御の一つである。
なお、図3は、かかるアイソクロナス制御におけるアクセル開度に対するエンジン回転数と燃料噴射量の関係を模式的に表した概略特性線図である。
同図において、横軸はエンジン回転数Nを、縦軸は燃料噴射量Qを、それぞれ示している。また、複数の点線は、種々のアクセル開度におけるエンジン回転数に対する燃料噴射量の変化を模式的に示した特性線である。
【0018】
アクセル開度は、二点鎖線で示されたように同図の右側に向かうに従い大きくなり、アイソクロナス制御においては、アクセル開度を一定に保った場合、エンジン回転数はアクセル開度に応じた回転数にほぼ維持されて、要求トルクに応じて燃料噴射量が変化する特性を有するものとなっている。なお、図3において、実線は、エンジン回転数に対する燃料噴射量の限界値を表している。
【0019】
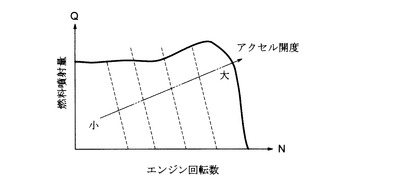
一方、”負荷追従優先モード”は、負荷変動に応じてエンジン回転数を変化させる制御であり(図4参照)、いわゆるドループ制御と称されるエンジン回転制御の一つである。
なお、図4は、かかるドループ制御におけるアクセル開度に対するエンジン回転数と燃料噴射量の関係を模式的に表した概略特性線図である。
同図において、横軸はエンジン回転数Nを、縦軸は燃料噴射量Qを、それぞれ示している。また、複数の点線は、種々のアクセル開度におけるエンジン回転数に対する燃料噴射量の変化を模式的に示した特性線である。
【0020】
アクセル開度は、二点鎖線で示されたように同図の右側に向かうに従い大きくなり、ドループ制御においては、アクセル開度を一定に保った場合、エンジン回転数が低下、換言すれば、負荷が増大すると燃料噴射量が増大する特性となっており、点線の傾斜は、先のアイソクロナス制御の場合に比して小さくなっているが、いわゆる普通車に比して急勾配となっている。なお、図4において、実線は、エンジン回転数に対する燃料噴射量の限界値を表している。
本発明の実施の形態においては、車両のユーザが、アイソクロナス制御やドループ制御等のエンジン回転制御に関する専門知識を敢えて持たなくとも、動作モードのイメージを把握できるような名称を付すことにより、上述の2つの制御を選択可能にしてある。
【0021】
しかして、ステップS102において、エンジン回転制御モードの切替要求が発生したと判定された場合(YESの場合)には、次述するステップS104の処理へ進む一方、エンジン回転制御モードの切替要求は発生していないと判定された場合(NOの場合)には、一連の処理を実行する必要はないので、図示されないメインルーチンへ戻ることとなる。
ステップS104においては、定回転優先モード切替要求がなされたのか否かが判定され、定回転優先モードへの切替要求がなされたと判定された場合(YESの場合)には、次述するステップS106の処理へ進む一方、定回転優先モードへの切替要求ではないと判定された場合(NOの場合)には、負荷追従優先モードへの切替要求がなされたとして後述するステップS108の処理へ進むこととなる。
すなわち、本発明の実施の形態においては、負荷追従優先モードから定回転優先モードへの切替要求が発生した場合(ステップS104において”YES”の場合)の処理と、定回転優先モードから負荷追従優先モードへの切替要求が生じた場合(ステップS104において”NO”の場合)の処理は、ステップS108の処理以降共通となっている。
【0022】
ステップS106においては、エンジン回転制御における積分項(I項)の初期化が行われる。すなわち、アイソクロナス制御は、基本的には、いわゆるPID制御を用いてフィードバック制御により行われるものであり、このステップS106においては、そのPID制御における積分項の初期化が行われることとなる。本発明の実施の形態において、この積分項の初期化は、制御モードの切替要求(図2のステップS102参照)が発生する直前における目標燃料噴射量Qが積分項の初期値として設定されるようになっている。
なお、目標燃料噴射量Qは、図示されないメインルーチンにおいて従来装置同様、実行される燃料噴射量制御処理において演算算出されるものとなっており、その算出された目標燃料噴射量Qを流用するようにすると好適である。
【0023】
次いで、定回転優先モードから負荷追従優先モードへのエンジン回転制御モードの切替、又は、負荷追従優先モードから定回転優先モードへのエンジン回転制御モードの切替後の対応するアクセル開度の演算算出が行われる(図2のステップS108参照)。
すなわち、エンジン回転制御モードの切替前のエンジン回転制御モードのアクセル開度におけるエンジン回転数とほぼ同一のエンジン回転数となるエンジン回転制御モード切替後のエンジン回転制御モードにおけるアクセル開度vAcc(以下、説明の便宜上「疑似アクセル開度」と称する)の算出が行われる。
このエンジン回転制御モードの切替後の対応するアクセル開度の算出は、切替直前のエンジン回転数と目標燃料噴射量Qを基に、所定の演算式により算出されるものとなっている。かかる所定の演算式は、試験やシミュレーション結果等に基づいて、個々の車両の具体的な条件等も加味して設定されるものである。
【0024】
次いで、上述のように算出された疑似アクセル開度vAccが、実際のアクセル開度(実アクセル開度)aAccを越えているか否かが判定される(図2のステップS110参照)。
しかして、ステップS110において、疑似アクセル開度vAccが、実際のアクセル開度aAccを越えていると判定された場合(YESの場合)には、次述するステップS112の処理へ進む一方、疑似アクセル開度vAccが、実際のアクセル開度aAccを越えていないと判定された場合(NOの場合)には、後述するステップS120の処理へ進むこととなる。
【0025】
ステップS112においては、先のステップS104の判定結果に基づいて、運転モード、すなわち、エンジン回転制御が、負荷追従優先モードから定回転優先モード、又は、定回転優先モードから負荷追従優先モードへ切替られて、且つ、疑似アクセル開度vAccで定回転優先モード又は負荷追従優先モードによるエンジン回転制御が行われることとなる。
このように、疑似アクセル開度vAccが、実際のアクセル開度aAccを越えていると判定された場合(図2のステップ110参照)に、エンジン回転制御モードの切替を行うのは、疑似アクセル開度vAccが、実際のアクセル開度aAccを越えない状態でエンジン回転制御モードの切替を行った場合には、エンジン回転数が切替直前よりさらに低下することとなり、運転者に与える運転フィーリングを低下させる結果を招くためである。
【0026】
次いで、実アクセル開度aAccが疑似アクセル開度vAccを越えたか否かが判定され(図2のステップS114参照)、実アクセル開度aAccが疑似アクセル開度vAccを越えたと判定された場合(YESの場合)には、疑似アクセル開度vAccに代えて実アクセル開度aAccでエンジン回転制御が継続され(図2のステップS116参照)、一旦、図示されないメインルーチンへ戻ることとなる。
【0027】
また、ステップS114において、実アクセル開度aAccは疑似アクセル開度vAccを越えていないと判定された場合(NOの場合)には、実アクセル開度aAccに第1の所定変化が生じたか否かが判定される(図2のステップS118参照)。
すなわち、本発明の実施の形態において、運転モード切替(図2のステップS112)の時点から、実アクセル開度aAccの増大量が第1の所定量を超えている(第1の所定変化)か否かが判定され、実アクセル開度aAccの増大量が第1の所定量を超えていると判定された場合(YESの場合)には、先に説明したステップS116の処理へ進む一方、実アクセル開度aAccの増大量は第1の所定量を超えていないと判定された場合(NOの場合)には、先のステップS114の処理へ戻り、以後、先に説明したと同様の処理が繰り返されることとなる。
なお、第1の所定量を如何なる値に設定するかは個々の車両の諸条件等を考慮して、それぞれ定められるべきものであり、特定の値に限定されるものではない。
また、第1の所定変化の内容についても、上述の例に限定される必要はなく、個々の車両の諸条件等に応じて、適宜設定しても良いものである。
【0028】
ここで、ステップS118の具体的な処理例としては、次述するようなものが好適である。
第1の例としては、実アクセル開度aAccと疑似アクセル開度vAccとの偏差が、所定値を下回ったか否かを判定し、所定値を下回ったと判定された場合には、実アクセル開度aAccへの切替を行い、ステップS116の処理を実行する一方、所定値を下回っていないと判定された場合には、ステップS114の処理へ戻るものである。
第2の例としては、実アクセル開度aAccが運転モードの切替時(図2のステップS112)よりも所定値以上大きくなったか否かを判定し、所定値以上大きくなったと判定された場合には、実アクセル開度aAccへの切替を行い、ステップS116の処理を実行する一方、所定値以上大きくなっていないと判定された場合には、ステップS114の処理へ戻るものである。
なお、この第2の例の処理を採る場合、疑似アクセル開度vAccと実アクセル開度aAccの偏差が小さい状態での切替となるため回転変動が小さく抑えられるという利点がある。
【0029】
第3の例としては、実アクセル開度aAccが運転モードの切替時(図2のステップS112)よりも所定値以上小さくなったか否かを判定し、所定値以上小さくなったと判定された場合には、実アクセル開度aAccへの切替を行い、ステップS116の処理を実行する一方、所定値以上小さくなっていないと判定された場合には、ステップS114の処理へ戻るものである。
なお、この第3の例の処理を採る場合、車両ユーザーの意思でアクセル操作が行われた場合に対するものであるので、車両の挙動に対して車両ユーザーが違和感を抱くことが少ないという利点がある。
【0030】
第4の例としては、実アクセル開度aAccがある一定時間の間変化しない場合に、疑似アクセル開度vAccから実アクセル開度aAccへの切替を、任意の速度でランプ(Ramp)させて行い、ステップS116の処理を実行する一方、上述の条件が満足されない場合には、ステップS114の処理へ戻るものである。
第5の例としては、実際のエンジン回転数が、実アクセル開度aAccを基に算出される定回転優先モードでの目標回転数に達した場合に、実アクセル開度aAccへの切替を行い、定回転優先モードでのエンジン回転制御を実行する一方、上述の条件が満足されない場合には、ステップS114の処理へ戻るものである。なお、この第5の例は、負荷追従優先モードにあって、定回転優先モードへ切替を行う場合に適用されるものである。
なお、上述のいずれの処理を用いるかは、車両の種類や規模等を考慮して適宜選択されるべきものである。
【0031】
一方、ステップS120においては、先のステップS104の判定結果に基づいて、運転モード、すなわち、エンジン回転制御が、負荷追従優先モードから定回転優先モード、又は、定回転優先モードから負荷追従優先モードへ切替られて、且つ、疑似アクセル開度vAccで定回転優先モード又は負荷追従優先モードによるエンジン回転制御が行われることとなる。
なお、このステップS120の処理内容は、先のステップS112の処理内容と基本的に同一である。本発明の実施の形態においては、エンジン回転制御モードの切替の際に、疑似アクセル開度が実アクセル開度を越えている場合には、ステップS114以降の処理を実行する一方、疑似アクセル開度が実アクセル開度を越えていない場合には、ステップS122以降の処理を実行するものとしているが、いずれの処理を行うにしても、それぞれの処理の開始に際しては、まず、疑似アクセル開度を用い、その後、ステップS114以降の処理、又は、ステップS122以降の処理を行うようにしている。
【0032】
次いで、実アクセル開度aAccが疑似アクセル開度vAccを下回ったか否かが判定され(図2のステップS122参照)、実アクセル開度aAccが疑似アクセル開度vAccを下回ったと判定された場合(YESの場合)には、先に説明したステップS116の処理へ進むこととなる。
一方、ステップS122において、実アクセル開度aAccは疑似アクセル開度vAccを下回っていないと判定された場合(NOの場合)には、実アクセル開度aAccに第2の所定変化が生じたか否かが判定される(図2のステップS124参照)。
すなわち、本発明の実施の形態において、運転モード切替(図2のステップS120)の時点から、実アクセル開度aAccの増大量が第2の所定量を超えている(第2の所定変化)か否かが判定され、実アクセル開度aAccの増大量が第2の所定量を超えていると判定された場合(YESの場合)には、先に説明したステップS116の処理へ進む一方、実アクセル開度aAccの増大量は第1の所定量を超えていないと判定された場合(NOの場合)には、先のステップS122の処理へ戻り、以後、先に説明したと同様の処理が繰り返されることとなる。
【0033】
なお、第2の所定量を如何なる値に設定するかは個々の車両の諸条件等を考慮して、それぞれ適宜定められるべきものであり、特定の値に限定されるものではない。さらに、第2の所定量は、先の第1の所定量(図2のステップS118参照)と同一としても良い。
また、第2の所定変化の内容についても、上述の例に限定される必要はなく、個々の車両の諸条件等に応じて、適宜設定しても良いものである。
【0034】
ここで、ステップS124の具体的な処理例としては、次述するようなものが好適である。
第1の例としては、実アクセル開度aAccと疑似アクセル開度vAccとの偏差が、所定値を下回ったか否かを判定し、所定値を下回ったと判定された場合には、実アクセル開度aAccへの切替を行い、ステップS116の処理を実行する一方、所定値を下回っていないと判定された場合には、ステップS122の処理へ戻るものである。
第2の例としては、実アクセル開度aAccが運転モードの切替時(図2のステップS112)よりも所定値以上小さくなったか否かを判定し、所定値以上小さくなったと判定された場合には、実アクセル開度aAccへの切替を行い、ステップS116の処理を実行する一方、所定値以上小さくなっていないと判定された場合には、ステップS122の処理へ戻るものである。
なお、この第2の例の処理を採る場合、疑似アクセル開度vAccと実アクセル開度aAccの偏差が小さい状態での切替となるため回転変動が小さく抑えられるという利点がある。
【0035】
第3の例としては、実アクセル開度aAccが運転モードの切替時(図2のステップS112)よりも所定値以上大きくなったか否かを判定し、所定値以上大きくなったと判定された場合には、実アクセル開度aAccへの切替を行い、ステップS116の処理を実行する一方、所定値以上大きくなっていないと判定された場合には、ステップS122の処理へ戻るものである。
なお、この第3の例の処理を採る場合、車両ユーザーの意思でアクセル操作が行われた場合に対するものであるので、車両の挙動に対して車両ユーザーが違和感を抱くことが少ないという利点がある。
第4の例としては、実アクセル開度aAccがある一定時間の間変化しない場合に、疑似アクセル開度vAccから実アクセル開度aAccへの切替を、任意の速度でランプ(Ramp)させて行い、ステップS116の処理を実行する一方、上述の条件が満足されない場合には、ステップS122の処理へ戻るものである。
第5の例としては、実際のエンジン回転数が、実アクセル開度aAccを基に算出される定回転優先モードでの目標回転数に達した場合に、実アクセル開度aAccへの切替を行い、定回転優先モードでのエンジン回転制御を実行する一方、上述の条件が満足されない場合には、ステップS122の処理へ戻るものである。なお、この第5の例は、負荷追従優先モードにあって、定回転優先モードへ切替を行う場合に適用されるものである。
なお、上述のいずれの処理を用いるかは、車両の種類や規模等を考慮して適宜選択されるべきものである。
【0036】
上述した本発明の実施の形態においては、内燃機関の燃料噴射制御装置として、コモンレール式燃料噴射制御装置を例に採り、本発明に係るエンジン回転制御切替方法を適用した場合を説明したが、内燃機関の燃料噴射制御装置は、コモンレール式燃料噴射制御装置に限定される必要はなく、他の形式の装置であっても良い。
【産業上の利用可能性】
【0037】
ドループ制御とアイソクロナス制御の円滑な切替が所望される車両に適する。
【符号の説明】
【0038】
3…エンジン
4…電子制御ユニット
20…切替入力回路
【技術分野】
【0001】
本発明は、車両のエンジン回転制御に係り、特に、制御モードの切替における運転フィーリングの向上等を図ったものに関する。
【背景技術】
【0002】
農耕用車両や建築用車両などにおいては、エンジンの回転制御モードとして、エンジンの負荷変動に関わらず出力が一定となるようエンジン回転数を制御するアイソクロナス制御と、負荷に応じてエンジン回転数を変化させるドループ制御の2つの代表的な制御モードがあることは従来から知られているところである。
これらの制御モードは、車両に要求される特性や、車両ユーザの特質等を考慮していずれか適する一方の制御モードが搭載されるか、又は、双方の制御を選択的に切替可能に搭載されるかして用いられるのが基本であるが、これらの制御モードを基本にして、様々な観点から、より制御性の向上等のため方策が加えられたものなども提案されつつある(例えば、特許文献1等参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−110635号公報(第2−4頁、図1−図3)
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上述の2つの制御モードは、同一のアクセル開度に対する回転変動率が異なるため、2つの制御モードを切替可能に搭載した車両においては、その制御モードの切替の際に、トルク変動を招くと共に、吹け上がりや回転降下などのエンジン回転の変化が生ずるため、その変化を極力抑圧することが所望される。
【0005】
本発明は、上記実状に鑑みてなされたもので、ドループ制御とアイソクロナス制御の円滑な切替を可能とするエンジン回転制御モード切替方法及びエンジン回転制御装置を提供するものである。
【課題を解決するための手段】
【0006】
上記本発明の目的を達成するため、本発明に係るエンジン回転制御モード切替方法は、
内燃機関の動作制御を実行する電子制御ユニットが設けられ、ドループ制御とアイソクロナス制御のいずれか一方が所望に応じて選択、実行されて前記内燃機関の回転制御が可能に構成されてなるエンジン回転制御装置における前記ドループ制御と前記アイソクロナス制御との切替のためのエンジン回転制御モード切替方法であって、
前記ドループ制御から前記アイソクロナス制御へのエンジン回転制御モードの切替要求が生じた際、又は、前記アイソクロナス制御からドループ制御へのエンジン回転制御モードの切替要求が生じた際に、以下の処理を実行するに先立って、前記ドループ制御から前記アイソクロナス制御へのエンジン回転制御モードの切替要求が生じた際にのみ前記アイソクロナス制御において実行されるPID制御における積分項の値を、切替直前の目標燃料噴射量により初期化し、
しかる後、前記いずれかのエンジン回転制御モードの切替直前のエンジン回転制御モードの実行時のアクセル開度における前記内燃機関の回転状態に対応する、前記エンジン回転制御モードの切替後の制御状態におけるアクセル開度を疑似アクセル開度として所定の演算式により算出し、
次いで、前記算出された疑似アクセル開度が実際のアクセル開度を越えている場合に、前記エンジン回転制御モードの切替を行うと共に前記疑似アクセル開度を用いてエンジン回転制御を行い、切替後に、実際のアクセル開度が前記疑似アクセル開度を越えた場合には、実際のアクセル開度で前記切替後のエンジン回転制御モードによるエンジン回転制御を継続するよう構成されてなるものである。
また、上記本発明の目的を達成するため、本発明に係るエンジン回転制御装置は、
内燃機関の動作制御を実行する電子制御ユニットが設けられ、ドループ制御とアイソクロナス制御のいずれか一方が所望に応じて選択、実行されて前記内燃機関の回転制御が可能に構成されてなるエンジン回転制御装置であって、
前記電子制御ユニットは、前記ドループ制御から前記アイソクロナス制御へのエンジン回転制御モードの切替要求が生じたと判定された際、又は、前記アイソクロナス制御からドループ制御へのエンジン回転制御モードの切替要求が生じたと判定された際に、以下の処理を実行するに先立って、前記ドループ制御から前記アイソクロナス制御へのエンジン回転制御モードの切替要求が生じたと判定された際にのみ前記アイソクロナス制御において実行されるPID制御における積分項の値を、切替直前の目標燃料噴射量により初期化し、
しかる後、前記いずれかのエンジン回転制御モードの切替直前のエンジン回転制御モードの実行時のアクセル開度における前記内燃機関の回転状態に対応する、前記エンジン回転制御モードの切替後の制御状態におけるアクセル開度を疑似アクセル開度として所定の演算式により算出し、
次いで、前記算出された疑似アクセル開度が実際のアクセル開度を越えていると判定された場合に、前記エンジン回転制御モードの切替を行うと共に前記疑似アクセル開度を用いてエンジン回転制御を行い、切替後に、実際のアクセル開度が前記疑似アクセル開度を越えたと判定された場合には、実際のアクセル開度で前記切替後のエンジン回転制御モードによるエンジン回転制御を継続するよう構成されてなるものである。
【発明の効果】
【0007】
本発明によれば、エンジン回転制御モードの切替の際に、切替前のエンジン回転制御モードにおけるエンジン回転状態でエンジン回転制御モードの切替が行われるようにしたので、従来と異なり、エンジンの吹け上がりや回転降下などを招くことなく、運転フィーリングの悪化を招くことない円滑な切替が可能となるという効果を奏するものである。
【図面の簡単な説明】
【0008】
【図1】本発明の実施の形態におけるエンジン回転制御モード切替方法が適用されるコモンレール式燃料噴射制御装置の構成例を示す構成図である。
【図2】図1に示されたコモンレール式燃料噴射制御装置に用いられる電子制御ユニットにより実行される本発明の実施の形態におけるエンジン回転制御モード切替処理の手順を示すサブルーチンフローチャートである。
【図3】アイソクロナス制御におけるアクセル開度に対するエンジン回転数と燃料噴射量の関係を模式的に表した概略特性線図である
【図4】ドループ制御におけるアクセル開度に対するエンジン回転数と燃料噴射量の関係を模式的に表した概略特性線図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施の形態について、図1乃至図4を参照しつつ説明する。
なお、以下に説明する部材、配置等は本発明を限定するものではなく、本発明の趣旨の範囲内で種々改変することができるものである。
最初に、本発明の実施の形態におけるエンジン回転制御モード切替方法が適用される内燃機関噴射制御装置の構成について、図1を参照しつつ説明する。
この図1に示された内燃機関噴射制御装置は、具体的には、特に、コモンレール式燃料噴射制御装置が構成されたものとなっている。
【0010】
このコモンレール式燃料噴射制御装置は、高圧燃料の圧送を行う高圧ポンプ装置50と、この高圧ポンプ装置50により圧送された高圧燃料を蓄えるコモンレール1と、このコモンレール1から供給された高圧燃料をディーゼルエンジン(以下「エンジン」と称する)3の気筒へ噴射供給する複数の燃料噴射弁(インジェクタ)2−1〜2−nと、燃料噴射制御処理や後述する調量弁の駆動制御処理などを実行する電子制御ユニット(図1においては「ECU」と表記)4を主たる構成要素として構成されたものとなっている。
かかる構成自体は、従来から良く知られているこの種の燃料噴射制御装置の基本的な構成と同一のものである。
【0011】
高圧ポンプ装置50は、フィードポンプ5と、調量弁6と、燃料供給ポンプとしての高圧ポンプ7とを主たる構成要素として構成されてなる公知・周知の構成を有してなるものである。
かかる構成において、燃料タンク9の燃料は、フィードポンプ5により汲み上げられ、調量弁6を介して高圧ポンプ7へ供給されるようになっている。調量弁6には、電磁式比例制御弁が用いられ、その通電量が電子制御ユニット4に制御されることで、高圧ポンプ7への供給燃料の流量、換言すれば、高圧ポンプ7の吐出量が調整されるものとなっている。
【0012】
なお、フィードポンプ5の出力側と燃料タンク9との間には、戻し弁8が設けられており、フィードポンプ5の出力側の余剰燃料を燃料タンク9へ戻すことができるようになっている。
また、フィードポンプ5は、高圧ポンプ装置50の上流側に高圧ポンプ装置50と別体に設けるようにしても、また、燃料タンク9内に設けるようにしても良いものである。
【0013】
燃料噴射弁(インジェクタ)2−1〜2−nは、ディーゼルエンジン3の気筒毎に設けられており、それぞれコモンレール1から高圧燃料の供給を受け、電子制御ユニット4による噴射制御によって燃料噴射を行うようになっている。
本発明のコモンレール1には、余剰高圧燃料をタンク9へ戻すリターン通路(図示せず)に、電磁制御式の圧力制御弁12が設けられており、調量弁6と共にレール圧の制御に用いられるようになっている。
【0014】
電子制御ユニット4は、例えば、公知・周知の構成を有してなるマイクロコンピュータ(図示せず)を中心に、RAMやROM等の記憶素子(図示せず)を有すると共に、燃料噴射弁2−1〜2−nを駆動するための駆動回路(図示せず)や、調量弁6や圧力制御弁12への通電を行うための通電回路(図示せず)を主たる構成要素として構成されたものとなっている。
かかる電子制御ユニット4には、コモンレール1の圧力を検出する圧力センサ11の検出信号が入力される他、エンジン回転数やアクセル開度などの各種の検出信号が、エンジン3の動作制御や燃料噴射制御に供するために入力されるようになっている。
【0015】
本発明の実施の形態においては、後述するエンジン回転制御モードを切替るための切替入力回路20が設けられており、その出力信号は、電子制御ユニット4に入力され、制御モードの切り替処理に供されるようになっている。
切替入力回路20は、後述する2つのエンジン回転制御モードを選択するためのスイッチ(図示せず)を備え、そのスイッチにより選択された制御モードに応じた信号を電子制御ユニット4へ出力するよう構成されてなるものである。かかる機能を有する回路自体は、本発明特有のものではなく、様々の回路構成を採り得るものであるので、ここでの具体的な回路構成については、その詳細な説明を省略する。
【0016】
図2には、電子制御ユニット4により実行されるエンジン回転制御モード切替処理の手順がサブルーチンフローチャートに示されており、以下、同図を参照しつつ、その内容について説明する。
電子制御ユニット4による処理が開始されると、最初に、運転モード切替要求、換言すれば、エンジン回転制御モードの切替要求が発生したか否かが判定される(図2のステップS102参照)。
すなわち、本発明の実施の形態において、エンジン回転制御モードの切替は、切替入力回路20を車両ユーザが操作することで行われるものとなっており、”定回転優先モード”と、”負荷追従優先モード”の2つのモードの内、所望に応じて一方を選択可能となっている。
【0017】
ここで、”定回転優先モード”は、エンジン3の負荷変動に関わらず、エンジン回転数を一定に維持するための制御であり(図3参照)、いわゆるアイソクロナス制御と称されるエンジン回転制御の一つである。
なお、図3は、かかるアイソクロナス制御におけるアクセル開度に対するエンジン回転数と燃料噴射量の関係を模式的に表した概略特性線図である。
同図において、横軸はエンジン回転数Nを、縦軸は燃料噴射量Qを、それぞれ示している。また、複数の点線は、種々のアクセル開度におけるエンジン回転数に対する燃料噴射量の変化を模式的に示した特性線である。
【0018】
アクセル開度は、二点鎖線で示されたように同図の右側に向かうに従い大きくなり、アイソクロナス制御においては、アクセル開度を一定に保った場合、エンジン回転数はアクセル開度に応じた回転数にほぼ維持されて、要求トルクに応じて燃料噴射量が変化する特性を有するものとなっている。なお、図3において、実線は、エンジン回転数に対する燃料噴射量の限界値を表している。
【0019】
一方、”負荷追従優先モード”は、負荷変動に応じてエンジン回転数を変化させる制御であり(図4参照)、いわゆるドループ制御と称されるエンジン回転制御の一つである。
なお、図4は、かかるドループ制御におけるアクセル開度に対するエンジン回転数と燃料噴射量の関係を模式的に表した概略特性線図である。
同図において、横軸はエンジン回転数Nを、縦軸は燃料噴射量Qを、それぞれ示している。また、複数の点線は、種々のアクセル開度におけるエンジン回転数に対する燃料噴射量の変化を模式的に示した特性線である。
【0020】
アクセル開度は、二点鎖線で示されたように同図の右側に向かうに従い大きくなり、ドループ制御においては、アクセル開度を一定に保った場合、エンジン回転数が低下、換言すれば、負荷が増大すると燃料噴射量が増大する特性となっており、点線の傾斜は、先のアイソクロナス制御の場合に比して小さくなっているが、いわゆる普通車に比して急勾配となっている。なお、図4において、実線は、エンジン回転数に対する燃料噴射量の限界値を表している。
本発明の実施の形態においては、車両のユーザが、アイソクロナス制御やドループ制御等のエンジン回転制御に関する専門知識を敢えて持たなくとも、動作モードのイメージを把握できるような名称を付すことにより、上述の2つの制御を選択可能にしてある。
【0021】
しかして、ステップS102において、エンジン回転制御モードの切替要求が発生したと判定された場合(YESの場合)には、次述するステップS104の処理へ進む一方、エンジン回転制御モードの切替要求は発生していないと判定された場合(NOの場合)には、一連の処理を実行する必要はないので、図示されないメインルーチンへ戻ることとなる。
ステップS104においては、定回転優先モード切替要求がなされたのか否かが判定され、定回転優先モードへの切替要求がなされたと判定された場合(YESの場合)には、次述するステップS106の処理へ進む一方、定回転優先モードへの切替要求ではないと判定された場合(NOの場合)には、負荷追従優先モードへの切替要求がなされたとして後述するステップS108の処理へ進むこととなる。
すなわち、本発明の実施の形態においては、負荷追従優先モードから定回転優先モードへの切替要求が発生した場合(ステップS104において”YES”の場合)の処理と、定回転優先モードから負荷追従優先モードへの切替要求が生じた場合(ステップS104において”NO”の場合)の処理は、ステップS108の処理以降共通となっている。
【0022】
ステップS106においては、エンジン回転制御における積分項(I項)の初期化が行われる。すなわち、アイソクロナス制御は、基本的には、いわゆるPID制御を用いてフィードバック制御により行われるものであり、このステップS106においては、そのPID制御における積分項の初期化が行われることとなる。本発明の実施の形態において、この積分項の初期化は、制御モードの切替要求(図2のステップS102参照)が発生する直前における目標燃料噴射量Qが積分項の初期値として設定されるようになっている。
なお、目標燃料噴射量Qは、図示されないメインルーチンにおいて従来装置同様、実行される燃料噴射量制御処理において演算算出されるものとなっており、その算出された目標燃料噴射量Qを流用するようにすると好適である。
【0023】
次いで、定回転優先モードから負荷追従優先モードへのエンジン回転制御モードの切替、又は、負荷追従優先モードから定回転優先モードへのエンジン回転制御モードの切替後の対応するアクセル開度の演算算出が行われる(図2のステップS108参照)。
すなわち、エンジン回転制御モードの切替前のエンジン回転制御モードのアクセル開度におけるエンジン回転数とほぼ同一のエンジン回転数となるエンジン回転制御モード切替後のエンジン回転制御モードにおけるアクセル開度vAcc(以下、説明の便宜上「疑似アクセル開度」と称する)の算出が行われる。
このエンジン回転制御モードの切替後の対応するアクセル開度の算出は、切替直前のエンジン回転数と目標燃料噴射量Qを基に、所定の演算式により算出されるものとなっている。かかる所定の演算式は、試験やシミュレーション結果等に基づいて、個々の車両の具体的な条件等も加味して設定されるものである。
【0024】
次いで、上述のように算出された疑似アクセル開度vAccが、実際のアクセル開度(実アクセル開度)aAccを越えているか否かが判定される(図2のステップS110参照)。
しかして、ステップS110において、疑似アクセル開度vAccが、実際のアクセル開度aAccを越えていると判定された場合(YESの場合)には、次述するステップS112の処理へ進む一方、疑似アクセル開度vAccが、実際のアクセル開度aAccを越えていないと判定された場合(NOの場合)には、後述するステップS120の処理へ進むこととなる。
【0025】
ステップS112においては、先のステップS104の判定結果に基づいて、運転モード、すなわち、エンジン回転制御が、負荷追従優先モードから定回転優先モード、又は、定回転優先モードから負荷追従優先モードへ切替られて、且つ、疑似アクセル開度vAccで定回転優先モード又は負荷追従優先モードによるエンジン回転制御が行われることとなる。
このように、疑似アクセル開度vAccが、実際のアクセル開度aAccを越えていると判定された場合(図2のステップ110参照)に、エンジン回転制御モードの切替を行うのは、疑似アクセル開度vAccが、実際のアクセル開度aAccを越えない状態でエンジン回転制御モードの切替を行った場合には、エンジン回転数が切替直前よりさらに低下することとなり、運転者に与える運転フィーリングを低下させる結果を招くためである。
【0026】
次いで、実アクセル開度aAccが疑似アクセル開度vAccを越えたか否かが判定され(図2のステップS114参照)、実アクセル開度aAccが疑似アクセル開度vAccを越えたと判定された場合(YESの場合)には、疑似アクセル開度vAccに代えて実アクセル開度aAccでエンジン回転制御が継続され(図2のステップS116参照)、一旦、図示されないメインルーチンへ戻ることとなる。
【0027】
また、ステップS114において、実アクセル開度aAccは疑似アクセル開度vAccを越えていないと判定された場合(NOの場合)には、実アクセル開度aAccに第1の所定変化が生じたか否かが判定される(図2のステップS118参照)。
すなわち、本発明の実施の形態において、運転モード切替(図2のステップS112)の時点から、実アクセル開度aAccの増大量が第1の所定量を超えている(第1の所定変化)か否かが判定され、実アクセル開度aAccの増大量が第1の所定量を超えていると判定された場合(YESの場合)には、先に説明したステップS116の処理へ進む一方、実アクセル開度aAccの増大量は第1の所定量を超えていないと判定された場合(NOの場合)には、先のステップS114の処理へ戻り、以後、先に説明したと同様の処理が繰り返されることとなる。
なお、第1の所定量を如何なる値に設定するかは個々の車両の諸条件等を考慮して、それぞれ定められるべきものであり、特定の値に限定されるものではない。
また、第1の所定変化の内容についても、上述の例に限定される必要はなく、個々の車両の諸条件等に応じて、適宜設定しても良いものである。
【0028】
ここで、ステップS118の具体的な処理例としては、次述するようなものが好適である。
第1の例としては、実アクセル開度aAccと疑似アクセル開度vAccとの偏差が、所定値を下回ったか否かを判定し、所定値を下回ったと判定された場合には、実アクセル開度aAccへの切替を行い、ステップS116の処理を実行する一方、所定値を下回っていないと判定された場合には、ステップS114の処理へ戻るものである。
第2の例としては、実アクセル開度aAccが運転モードの切替時(図2のステップS112)よりも所定値以上大きくなったか否かを判定し、所定値以上大きくなったと判定された場合には、実アクセル開度aAccへの切替を行い、ステップS116の処理を実行する一方、所定値以上大きくなっていないと判定された場合には、ステップS114の処理へ戻るものである。
なお、この第2の例の処理を採る場合、疑似アクセル開度vAccと実アクセル開度aAccの偏差が小さい状態での切替となるため回転変動が小さく抑えられるという利点がある。
【0029】
第3の例としては、実アクセル開度aAccが運転モードの切替時(図2のステップS112)よりも所定値以上小さくなったか否かを判定し、所定値以上小さくなったと判定された場合には、実アクセル開度aAccへの切替を行い、ステップS116の処理を実行する一方、所定値以上小さくなっていないと判定された場合には、ステップS114の処理へ戻るものである。
なお、この第3の例の処理を採る場合、車両ユーザーの意思でアクセル操作が行われた場合に対するものであるので、車両の挙動に対して車両ユーザーが違和感を抱くことが少ないという利点がある。
【0030】
第4の例としては、実アクセル開度aAccがある一定時間の間変化しない場合に、疑似アクセル開度vAccから実アクセル開度aAccへの切替を、任意の速度でランプ(Ramp)させて行い、ステップS116の処理を実行する一方、上述の条件が満足されない場合には、ステップS114の処理へ戻るものである。
第5の例としては、実際のエンジン回転数が、実アクセル開度aAccを基に算出される定回転優先モードでの目標回転数に達した場合に、実アクセル開度aAccへの切替を行い、定回転優先モードでのエンジン回転制御を実行する一方、上述の条件が満足されない場合には、ステップS114の処理へ戻るものである。なお、この第5の例は、負荷追従優先モードにあって、定回転優先モードへ切替を行う場合に適用されるものである。
なお、上述のいずれの処理を用いるかは、車両の種類や規模等を考慮して適宜選択されるべきものである。
【0031】
一方、ステップS120においては、先のステップS104の判定結果に基づいて、運転モード、すなわち、エンジン回転制御が、負荷追従優先モードから定回転優先モード、又は、定回転優先モードから負荷追従優先モードへ切替られて、且つ、疑似アクセル開度vAccで定回転優先モード又は負荷追従優先モードによるエンジン回転制御が行われることとなる。
なお、このステップS120の処理内容は、先のステップS112の処理内容と基本的に同一である。本発明の実施の形態においては、エンジン回転制御モードの切替の際に、疑似アクセル開度が実アクセル開度を越えている場合には、ステップS114以降の処理を実行する一方、疑似アクセル開度が実アクセル開度を越えていない場合には、ステップS122以降の処理を実行するものとしているが、いずれの処理を行うにしても、それぞれの処理の開始に際しては、まず、疑似アクセル開度を用い、その後、ステップS114以降の処理、又は、ステップS122以降の処理を行うようにしている。
【0032】
次いで、実アクセル開度aAccが疑似アクセル開度vAccを下回ったか否かが判定され(図2のステップS122参照)、実アクセル開度aAccが疑似アクセル開度vAccを下回ったと判定された場合(YESの場合)には、先に説明したステップS116の処理へ進むこととなる。
一方、ステップS122において、実アクセル開度aAccは疑似アクセル開度vAccを下回っていないと判定された場合(NOの場合)には、実アクセル開度aAccに第2の所定変化が生じたか否かが判定される(図2のステップS124参照)。
すなわち、本発明の実施の形態において、運転モード切替(図2のステップS120)の時点から、実アクセル開度aAccの増大量が第2の所定量を超えている(第2の所定変化)か否かが判定され、実アクセル開度aAccの増大量が第2の所定量を超えていると判定された場合(YESの場合)には、先に説明したステップS116の処理へ進む一方、実アクセル開度aAccの増大量は第1の所定量を超えていないと判定された場合(NOの場合)には、先のステップS122の処理へ戻り、以後、先に説明したと同様の処理が繰り返されることとなる。
【0033】
なお、第2の所定量を如何なる値に設定するかは個々の車両の諸条件等を考慮して、それぞれ適宜定められるべきものであり、特定の値に限定されるものではない。さらに、第2の所定量は、先の第1の所定量(図2のステップS118参照)と同一としても良い。
また、第2の所定変化の内容についても、上述の例に限定される必要はなく、個々の車両の諸条件等に応じて、適宜設定しても良いものである。
【0034】
ここで、ステップS124の具体的な処理例としては、次述するようなものが好適である。
第1の例としては、実アクセル開度aAccと疑似アクセル開度vAccとの偏差が、所定値を下回ったか否かを判定し、所定値を下回ったと判定された場合には、実アクセル開度aAccへの切替を行い、ステップS116の処理を実行する一方、所定値を下回っていないと判定された場合には、ステップS122の処理へ戻るものである。
第2の例としては、実アクセル開度aAccが運転モードの切替時(図2のステップS112)よりも所定値以上小さくなったか否かを判定し、所定値以上小さくなったと判定された場合には、実アクセル開度aAccへの切替を行い、ステップS116の処理を実行する一方、所定値以上小さくなっていないと判定された場合には、ステップS122の処理へ戻るものである。
なお、この第2の例の処理を採る場合、疑似アクセル開度vAccと実アクセル開度aAccの偏差が小さい状態での切替となるため回転変動が小さく抑えられるという利点がある。
【0035】
第3の例としては、実アクセル開度aAccが運転モードの切替時(図2のステップS112)よりも所定値以上大きくなったか否かを判定し、所定値以上大きくなったと判定された場合には、実アクセル開度aAccへの切替を行い、ステップS116の処理を実行する一方、所定値以上大きくなっていないと判定された場合には、ステップS122の処理へ戻るものである。
なお、この第3の例の処理を採る場合、車両ユーザーの意思でアクセル操作が行われた場合に対するものであるので、車両の挙動に対して車両ユーザーが違和感を抱くことが少ないという利点がある。
第4の例としては、実アクセル開度aAccがある一定時間の間変化しない場合に、疑似アクセル開度vAccから実アクセル開度aAccへの切替を、任意の速度でランプ(Ramp)させて行い、ステップS116の処理を実行する一方、上述の条件が満足されない場合には、ステップS122の処理へ戻るものである。
第5の例としては、実際のエンジン回転数が、実アクセル開度aAccを基に算出される定回転優先モードでの目標回転数に達した場合に、実アクセル開度aAccへの切替を行い、定回転優先モードでのエンジン回転制御を実行する一方、上述の条件が満足されない場合には、ステップS122の処理へ戻るものである。なお、この第5の例は、負荷追従優先モードにあって、定回転優先モードへ切替を行う場合に適用されるものである。
なお、上述のいずれの処理を用いるかは、車両の種類や規模等を考慮して適宜選択されるべきものである。
【0036】
上述した本発明の実施の形態においては、内燃機関の燃料噴射制御装置として、コモンレール式燃料噴射制御装置を例に採り、本発明に係るエンジン回転制御切替方法を適用した場合を説明したが、内燃機関の燃料噴射制御装置は、コモンレール式燃料噴射制御装置に限定される必要はなく、他の形式の装置であっても良い。
【産業上の利用可能性】
【0037】
ドループ制御とアイソクロナス制御の円滑な切替が所望される車両に適する。
【符号の説明】
【0038】
3…エンジン
4…電子制御ユニット
20…切替入力回路
【特許請求の範囲】
【請求項1】
内燃機関の動作制御を実行する電子制御ユニットが設けられ、ドループ制御とアイソクロナス制御のいずれか一方が所望に応じて選択、実行されて前記内燃機関の回転制御が可能に構成されてなるエンジン回転制御装置における前記ドループ制御と前記アイソクロナス制御との切替のためのエンジン回転制御モード切替方法であって、
前記ドループ制御から前記アイソクロナス制御へのエンジン回転制御モードの切替要求が生じた際、又は、前記アイソクロナス制御からドループ制御へのエンジン回転制御モードの切替要求が生じた際に、以下の処理を実行するに先立って、前記ドループ制御から前記アイソクロナス制御へのエンジン回転制御モードの切替要求が生じた際にのみ前記アイソクロナス制御において実行されるPID制御における積分項の値を、切替直前の目標燃料噴射量により初期化し、
しかる後、前記いずれかのエンジン回転制御モードの切替直前のエンジン回転制御モードの実行時のアクセル開度における前記内燃機関の回転状態に対応する、前記エンジン回転制御モードの切替後の制御状態におけるアクセル開度を疑似アクセル開度として所定の演算式により算出し、
次いで、前記算出された疑似アクセル開度が実際のアクセル開度を越えている場合に、前記エンジン回転制御モードの切替を行うと共に前記疑似アクセル開度を用いてエンジン回転制御を行い、切替後に、実際のアクセル開度が前記疑似アクセル開度を越えた場合には、実際のアクセル開度で前記切替後のエンジン回転制御モードによるエンジン回転制御を継続することを特徴とするエンジン回転制御切替方法。
【請求項2】
前記算出された疑似アクセル開度が実アクセル開度を下回っている場合に、前記エンジン回転制御モードの切替を行うと共に前記疑似アクセル開度を用いてエンジン回転制御を行い、切替後に、実アクセル開度が疑似アクセル開度を下回った場合には、実アクセル開度で前記切替後のエンジン回転制御モードによるエンジン回転制御を行うことを特徴とする請求項1記載のエンジン回転制御切替方法。
【請求項3】
内燃機関の動作制御を実行する電子制御ユニットが設けられ、ドループ制御とアイソクロナス制御のいずれか一方が所望に応じて選択、実行されて前記内燃機関の回転制御が可能に構成されてなるエンジン回転制御装置であって、
前記電子制御ユニットは、前記ドループ制御から前記アイソクロナス制御へのエンジン回転制御モードの切替要求が生じたと判定された際、又は、前記アイソクロナス制御からドループ制御へのエンジン回転制御モードの切替要求が生じたと判定された際に、以下の処理を実行するに先立って、前記ドループ制御から前記アイソクロナス制御へのエンジン回転制御モードの切替要求が生じたと判定された際にのみ前記アイソクロナス制御において実行されるPID制御における積分項の値を、切替直前の目標燃料噴射量により初期化し、
しかる後、前記いずれかのエンジン回転制御モードの切替直前のエンジン回転制御モードの実行時のアクセル開度における前記内燃機関の回転状態に対応する、前記エンジン回転制御モードの切替後の制御状態におけるアクセル開度を疑似アクセル開度として所定の演算式により算出し、
次いで、前記算出された疑似アクセル開度が実際のアクセル開度を越えていると判定された場合に、前記エンジン回転制御モードの切替を行うと共に前記疑似アクセル開度を用いてエンジン回転制御を行い、切替後に、実際のアクセル開度が前記疑似アクセル開度を越えたと判定された場合には、実際のアクセル開度で前記切替後のエンジン回転制御モードによるエンジン回転制御を継続するよう構成されてなることを特徴とするエンジン回転制御装置。
【請求項4】
電子制御ユニットは、前記算出された疑似アクセル開度が実アクセル開度を下回っていると判定された場合に、前記エンジン回転制御モードの切替を行うと共に前記疑似アクセル開度を用いてエンジン回転制御を行い、切替後に、実アクセル開度が疑似アクセル開度を下回ったと判定された場合には、実アクセル開度で前記切替後のエンジン回転制御モードによるエンジン回転制御を行うよう構成されてなることを特徴とする請求項3記載のエンジン回転制御装置。
【請求項1】
内燃機関の動作制御を実行する電子制御ユニットが設けられ、ドループ制御とアイソクロナス制御のいずれか一方が所望に応じて選択、実行されて前記内燃機関の回転制御が可能に構成されてなるエンジン回転制御装置における前記ドループ制御と前記アイソクロナス制御との切替のためのエンジン回転制御モード切替方法であって、
前記ドループ制御から前記アイソクロナス制御へのエンジン回転制御モードの切替要求が生じた際、又は、前記アイソクロナス制御からドループ制御へのエンジン回転制御モードの切替要求が生じた際に、以下の処理を実行するに先立って、前記ドループ制御から前記アイソクロナス制御へのエンジン回転制御モードの切替要求が生じた際にのみ前記アイソクロナス制御において実行されるPID制御における積分項の値を、切替直前の目標燃料噴射量により初期化し、
しかる後、前記いずれかのエンジン回転制御モードの切替直前のエンジン回転制御モードの実行時のアクセル開度における前記内燃機関の回転状態に対応する、前記エンジン回転制御モードの切替後の制御状態におけるアクセル開度を疑似アクセル開度として所定の演算式により算出し、
次いで、前記算出された疑似アクセル開度が実際のアクセル開度を越えている場合に、前記エンジン回転制御モードの切替を行うと共に前記疑似アクセル開度を用いてエンジン回転制御を行い、切替後に、実際のアクセル開度が前記疑似アクセル開度を越えた場合には、実際のアクセル開度で前記切替後のエンジン回転制御モードによるエンジン回転制御を継続することを特徴とするエンジン回転制御切替方法。
【請求項2】
前記算出された疑似アクセル開度が実アクセル開度を下回っている場合に、前記エンジン回転制御モードの切替を行うと共に前記疑似アクセル開度を用いてエンジン回転制御を行い、切替後に、実アクセル開度が疑似アクセル開度を下回った場合には、実アクセル開度で前記切替後のエンジン回転制御モードによるエンジン回転制御を行うことを特徴とする請求項1記載のエンジン回転制御切替方法。
【請求項3】
内燃機関の動作制御を実行する電子制御ユニットが設けられ、ドループ制御とアイソクロナス制御のいずれか一方が所望に応じて選択、実行されて前記内燃機関の回転制御が可能に構成されてなるエンジン回転制御装置であって、
前記電子制御ユニットは、前記ドループ制御から前記アイソクロナス制御へのエンジン回転制御モードの切替要求が生じたと判定された際、又は、前記アイソクロナス制御からドループ制御へのエンジン回転制御モードの切替要求が生じたと判定された際に、以下の処理を実行するに先立って、前記ドループ制御から前記アイソクロナス制御へのエンジン回転制御モードの切替要求が生じたと判定された際にのみ前記アイソクロナス制御において実行されるPID制御における積分項の値を、切替直前の目標燃料噴射量により初期化し、
しかる後、前記いずれかのエンジン回転制御モードの切替直前のエンジン回転制御モードの実行時のアクセル開度における前記内燃機関の回転状態に対応する、前記エンジン回転制御モードの切替後の制御状態におけるアクセル開度を疑似アクセル開度として所定の演算式により算出し、
次いで、前記算出された疑似アクセル開度が実際のアクセル開度を越えていると判定された場合に、前記エンジン回転制御モードの切替を行うと共に前記疑似アクセル開度を用いてエンジン回転制御を行い、切替後に、実際のアクセル開度が前記疑似アクセル開度を越えたと判定された場合には、実際のアクセル開度で前記切替後のエンジン回転制御モードによるエンジン回転制御を継続するよう構成されてなることを特徴とするエンジン回転制御装置。
【請求項4】
電子制御ユニットは、前記算出された疑似アクセル開度が実アクセル開度を下回っていると判定された場合に、前記エンジン回転制御モードの切替を行うと共に前記疑似アクセル開度を用いてエンジン回転制御を行い、切替後に、実アクセル開度が疑似アクセル開度を下回ったと判定された場合には、実アクセル開度で前記切替後のエンジン回転制御モードによるエンジン回転制御を行うよう構成されてなることを特徴とする請求項3記載のエンジン回転制御装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−2284(P2013−2284A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−130596(P2011−130596)
【出願日】平成23年6月10日(2011.6.10)
【出願人】(000003333)ボッシュ株式会社 (510)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月10日(2011.6.10)
【出願人】(000003333)ボッシュ株式会社 (510)
【Fターム(参考)】
[ Back to top ]