
エンジン始動装置および始動方法
【課題】バッテリ電圧降下の許容範囲内で最大限に素早くエンジンを再始動させることができるエンジン始動装置および始動方法を提供することにある。
【解決手段】回転検知センサ110は、直流モータ105の回転数を検出する。制御手段109は、直流モータへの通電をPWM制御する。制御手段109は、回転検知センサ110により検出された直流モータの回転数をもとに、直流モータに流れる電流が予め設定した一定値となるようにPWM制御の通電比率Dを連続的に変化させる。これにより、モータ通電開始からエンジン始動完了までの間バッテリ電流はほぼ一定の設定した電流値として、バッテリ電圧も許容範囲内で、かつ、許容値に近い一定値に抑える。
【解決手段】回転検知センサ110は、直流モータ105の回転数を検出する。制御手段109は、直流モータへの通電をPWM制御する。制御手段109は、回転検知センサ110により検出された直流モータの回転数をもとに、直流モータに流れる電流が予め設定した一定値となるようにPWM制御の通電比率Dを連続的に変化させる。これにより、モータ通電開始からエンジン始動完了までの間バッテリ電流はほぼ一定の設定した電流値として、バッテリ電圧も許容範囲内で、かつ、許容値に近い一定値に抑える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、直流モータを用いてエンジンを始動させるエンジン始動装置および始動方法に係り、特に、アイドルストップシステムでエンジンを再始動する際に好適なエンジン始動装置および始動方法に関する。
【背景技術】
【0002】
近年の自動車においては、エネルギー資源の節約と環境保全を目的として、運転中に所定の条件が成立した時にエンジンを一時停止させるアイドルストップシステムを搭載したものがある。このアイドルストップシステムは、例えば信号待ちなどで運転者が車両を停止させる際などにエンジンを自動的に停止し、その後、運転者の再始動要求が生じた時点や、エンジンの稼働が必要になった時に自動的にエンジンを再始動するものである。エンジンを再始動させるにあたって、いわゆるピニオン押し出し式のスタータモータを用い、始動時にピニオンを押し出してピニオンをエンジン軸と直結されているリングギヤに噛合わせ、スタータモータによるクランキングによってエンジンを始動させる方法が多い。
【0003】
エンジンを始動させる際、スタータモータへの通電によりバッテリに電流が流れ、バッテリの特性上電流に対応して電圧が下がることが知られている。運転中も頻繁にエンジンを再始動させるアイドルストップシステムにおいては、電圧が下がると例えばカーナビゲーションシステムなどの電装品がリセットすることになる。このため、従来のアイドルストップシステムを搭載している車両は補助電源等で対応しているが、搭載性の悪化やコストアップに繋がる。
【0004】
一方で、従来、回路に抵抗を追加することで突入電流を低減しエンジン始動初期のバッテリ電圧降下を抑制し、その後は抵抗を短絡することで電流を流しクランキングトルクを確保するものが知られている(例えば、特許文献1参照)。
【0005】
また、他の例として、エンジン再始動時にスイッチング素子によってモータへの通電を制御し、PWM制御によりデューティ比を徐々に大きくしてモータの印加電圧を上昇させることで通電開始直後のバッテリ電圧降下を防止するものが知られている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2004−308645号公報
【特許文献2】特開2010−106825号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1や特許文献2記載のものでは、バッテリ電流が時間と共に低下するように制御されているため、スタータモータの出力トルクが減少し、エンジンのクランキングを十分に行えず、エンジン再始動に時間がかかる恐れがある。
【0008】
本発明の目的は、バッテリ電圧降下の許容範囲内で最大限に素早くエンジンを再始動させることができるエンジン始動装置および始動方法を提供することにある。
【課題を解決するための手段】
【0009】
(1)上記目的を達成するために、本発明は、直流モータの回転力をエンジンへ伝えてエンジンを始動させるエンジン始動装置であって、前記直流モータの回転数を検出する回転数検出手段と、前記直流モータへの通電をPWM制御する制御手段とを備え、前記制御手段は、前記回転数検出手段により検出された前記直流モータの回転数をもとに、前記直流モータに流れる電流が予め設定した一定値となるように前記PWM制御の通電比率を連続的に変化させ、これにより、モータ通電開始からエンジン始動完了までの間バッテリ電流はほぼ一定の設定した電流値として、バッテリ電圧も許容範囲内で、かつ、許容値に近い一定値に抑えるようにしたものである。
かかる構成により、バッテリ電圧降下の許容範囲内で最大限に素早くエンジンを再始動させることができるものとなる。
【0010】
(2)上記(1)において、好ましくは、前記制御手段は、前記直流モータへ流れる電流は直流モータへの通電をPWM制御する際の通電比率の2乗に比例すると近似できることを利用して通電比率を決定するようにしたものである。
【0011】
(3)上記(1)において、好ましくは、前記直流モータの回転数検出手段は、前記エンジンの回転数を間接的に利用し、前記直流モータの回転数を検出するようにしたものである。
【0012】
(4)上記(3)において、好ましくは、前記制御手段は、前記エンジンの回転数を間接的に利用して検出した前記直流モータの回転数が、実際の前記直流モータの回転数と乖離したことを判断する判断手段を備え、前記制御手段は、前記判断手段により、前記エンジンの回転数を間接的に利用して検出した前記直流モータの回転数が、実際の前記直流モータの回転数と乖離したことが判断された場合には、実際の前記直流モータの回転数を推測し、前記PWM制御の通電比率を決定する計算に利用するようにしたものである。
【0013】
(5)上記(1)において、好ましくは、前記制御手段は、前記直流モータ以外で前記バッテリを電源とする電気機器に流れる電流を元に、前記車両の電源を担うバッテリに流れる電流がトータルで所定の値となるように、前記直流モータに流す電流を変化させ、前記PWM制御の通電比率を決定するようにしたものである。
【0014】
(6)また、上記目的を達成するために、本発明は、直流モータの回転力をエンジンへ伝えてエンジンを始動させるエンジン始動方法であって、回転数検出手段により検出された直流モータの回転数をもとに、前記直流モータに流れる電流が予め設定した一定値となるように前記PWM制御の通電比率を連続的に変化させるものであり、ここで、モータ通電開始からエンジン始動完了までの間バッテリ電流はほぼ一定の設定した電流値として、バッテリ電圧も許容範囲内で、かつ、許容値に近い一定値に抑えるようにしたものである。
かかる方法により、バッテリ電圧降下の許容範囲内で最大限に素早くエンジンを再始動させることができるものとなる。
【発明の効果】
【0015】
本発明によれば、バッテリ電圧降下の許容範囲内で最大限に素早くエンジンを再始動させることができるものとなる。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施形態によるエンジン始動装置の構成図である。
【図2】本発明の一実施形態によるエンジン始動装置に用いるPWM制御の通電信号の説明図である。
【図3】本発明の一実施形態によるエンジン始動装置における通電比率Dの決定方法の説明図である。
【図4】本発明の一実施形態によるエンジン始動装置におけるエンジンの始動方法の内容を示すフローチャートである。
【図5】本発明の一実施形態によるエンジン始動装置において、モータの回転数の推測方法の内容を示すフローチャートである。
【図6】本発明の一実施形態によるエンジン始動装置における制御状態の一例を示す波形図である。
【図7】本発明の一実施形態によるエンジン始動装置における通電比率Dの他の決定方法の説明図である。
【発明を実施するための形態】
【0017】
以下、図1〜図7を用いて、本発明の一実施形態によるエンジン始動装置の構成及び動作について説明する。
最初に、図1を用いて、本実施形態によるエンジン始動装置の構成について説明する。
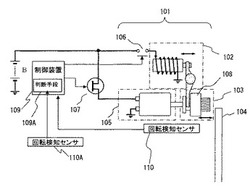
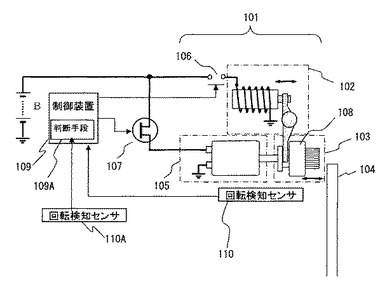
図1は、本発明の一実施形態によるエンジン始動装置の構成図である。
【0018】
図1に示すように、スタータ101は、大きく分けて、マグネットスイッチ102と、ピニオンギヤ103と、モータ105とによって構成される。モータ105は、いわゆる直流モータであり、直流の電圧を付加することで回転駆動力が発生する。ピニオンギヤ103は、必要な時にマグネットスイッチ102がレバーを引っ張ることでモータ回転軸上を移動し、エンジン軸と直結されているリングギヤ104と噛み合う。ピニオンギヤ103とリングギヤ104とが噛合った状態であれば、モータ105に通電することでモータ105は回転し、モータ105の回転力はピニオンギヤ108を通じてリングギヤ104に伝達されエンジンを回す構造にする。
【0019】
制御装置109は、通常の燃料噴射、点火、空気制御(電子制御スロットル)に加え、ブレーキペダル状態、車速等の各種情報より、アイドルストップを制御する。
【0020】
モータ回転検知センサ110は、モータの回転を検知する。検知されたモータ回転数の情報は、制御装置109に入力される。なお、モータの回転を直接センサで検知するのに代えて、エンジン回転検知センサ110Aを用いてエンジン回転を使って間接的にモータの回転数を検知する構成にしても良い。
【0021】
マグネットスイッチ105は、スイッチ106を介して制御装置109によって制御される。スイッチ106は、例えば機械式リレースイッチを使うことができる。また、モータ105への通電も、スイッチング素子107を介して制御装置109によって制御される。スイッチング素子107は、例えばMOSFETなどの半導体を用いたスイッチング素子を使うことができる。
【0022】
次に、図2を用いて、本実施形態によるエンジン始動装置に用いるPWM制御の通電信号について説明する。
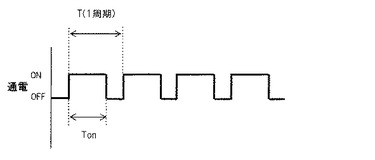
図2は、本発明の一実施形態によるエンジン始動装置に用いるPWM制御の通電信号の説明図である。
【0023】
制御装置109は、図2に示すPWM信号を通電信号として出力する。
【0024】
図2で示すTは、PWM制御の1周期の長さであり、例えばPWM制御の周波数を10KHzに設定した場合は、Tは0.1msとなる。本実施形態では、モータの電気的時定数よりも十分に速くなるようにPWM制御の周波数を決定する。
【0025】
図2に示すTONは1周期の中でモータへの通電を行う区間である。通電比率Dを次式(1)のように、1周期の中での通電する区間の割合と定義する。
【0026】
【数1】

【0027】
ここで、D:PWM制御における通電比率、TON:1周期の中でモータへ通電する区間[s]、T:1周期の長さ[s]である。
【0028】
通電比率Dは、0.0〜1.0の間で変化させることができる変数である。制御装置109は、通電比率Dを変えることで、モータへの通電量を制御する。
【0029】
次に、図3を用いて、本実施形態によるエンジン始動装置における通電比率Dの決定方法について説明する。
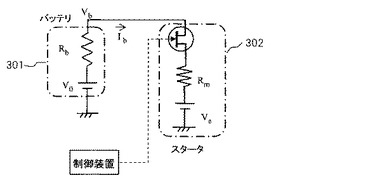
図3は、本発明の一実施形態によるエンジン始動装置における通電比率Dの決定方法の説明図である。
【0030】
図3は、バッテリとスタータの簡易的な回路図を示している。バッテリ301は内部抵抗Rbを有し、バッテリの初期電圧をV0とすると、バッテリの出力電圧Vbは、次式(2)によって決まる。
【0031】
【数2】
【0032】
ここで、Vb:バッテリの出力電圧[V]、V0:バッテリの初期電圧(電流が流れていない時の電圧)[V]、Ib:バッテリを流れる電流[A]、Rb:バッテリの内部抵抗[Ω]である。
【0033】
式(2)から分かるように、バッテリ電圧はバッテリ電流によって決められ、電流を所定の値にコントロールできればバッテリ電圧も所定の値にコントロールすることができる。図3のモータ部302も同様に、配線やモータ内部の抵抗、スイッチング素子の抵抗などをまとめてモータ抵抗Rmとした時、バッテリ電圧Vbは、次式(3)によって表すことができる。
【0034】
【数3】
【0035】
ここで、Vb:バッテリの出力電圧[V]、Ib:バッテリを流れる電流 [A]、Rm:モータの抵抗(配線抵抗、内部抵抗、スイッチング素子の抵抗を含む)[Ω]、Ve:モータ回転による逆起電圧[V]、ke:モータの逆起電圧係数[V/rpm]、Nm:モータの回転数[rpm]である。
【0036】
ここで、式(2),式(3)により、次式(4)の関係が得られる。
【0037】
【数4】
【0038】
式(4)から分かるように、一般的には直流モータにおいて回転数Nmが0の時、つまり通電し始めの時に電流が一番多く流れ、回転数が速くなれば電流は少なくなることが知られている。
【0039】
ここで、PWM制御の通電比率Dを変化させることで電流を一定に制御するために、発明者らの研究では通電比率に対し電流は次式で近似できることを発見した。
【0040】
【数5】
【0041】
式(5)から分かるように、本実施形態ではPWM制御においてバッテリに流れる電流Ibは通電比率Dの2乗に比例するとする。なお、図3に示す構成では、モータ302に流れるモータ電流Imは、バッテリ電流Ibに等しいため、モータへ流れる電流Imは直流モータへの通電をPWM制御する際の通電比率Dの2乗に比例すると近似できる。この関係性は発明者らの研究により実験的に観測したうえで理論的に決定したものである。ただし、式(5)はPWMの1周期がモータの電気的時定数に対し十分速いと見なせる範囲においてのみ成立する近似であり、バッテリ電流Ibが定数とモータ回転数Nm、通電比率Dの二つの変数によって決められることを表している。この関係を逆に利用し、所定のバッテリ電流Ibになるように通電比率Dを決めるには、式(5)を次式(6)のように変形する。
【0042】
【数6】
【0043】
式(6)により、本実施形態では、バッテリ電流Ibを所定の値に設定したうえで、モータ回転数Nmにより通電比率Dを連続的に決定する。ただし式(6)によって計算された通電比率Dが1.0を超えた場合は通電比率を1.0とする。実際のシステムへ組込む際は、まずバッテリの電圧降下の許容値を元に、式(2)を用いて許容されるバッテリ電流を事前に決定する。バッテリの許容最低電圧は、例えば、10.5Vに設定される。そしてこのバッテリ電流値を含む、式(6)においてモータ回転数Nm以外の変数を予め計測するなどしたうえで、制御装置109に予め記憶させておく。
【0044】
次に、図4を用いて、本実施形態によるエンジン始動装置におけるエンジンの始動方法について説明する。
図4は、本発明の一実施形態によるエンジン始動装置におけるエンジンの始動方法の内容を示すフローチャートである。
【0045】
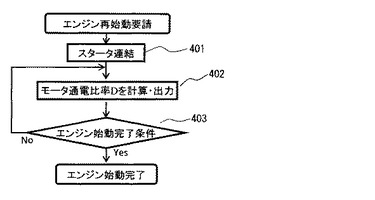
図4に示すように、エンジンの再始動要請が発生すると、ステップ401にて、図1に示した制御装置109は、スタータとエンジンを連結させる。ピニオン押出し方式の場合は、図1のピニオン103を押し出し、エンジンに直結されているリングギヤ104と噛合わせる。アイドルストップ中はスタータとエンジンが連結状態にあるアイドルストップ方式で、再始動要請が発生した時に既にスタータとエンジンが連結状態の場合は、ステップ401は必要ない。
【0046】
次に、ステップ402にて、制御装置109は、予め記憶しておいた変数とモータの回転数Nmを利用し、式(6)にてPWM制御の通電比率Dを計算し、PWM制御の波形を出力する。PWM制御によりモータに電流が流れ始め、モータのトルクがエンジンに伝達され回転を始める。
【0047】
そして、制御装置109は、ステップ403に示すエンジン始動完了条件が成立するまで、ステップ402の計算を継続する。ステップ403のエンジン始動完了条件は、例えばエンジン回転が所定の回転数以上になったことでエンジン始動が完了したと判断することができる。エンジン始動完了までは、制御装置109は、一定間隔(例えば2ms)でモータ回転数を検知し、通電比率Dを計算し出力を更新する。こうすることでモータ通電開始からエンジン始動完了までの間バッテリ電流はほぼ一定で、設定した電流値となるためバッテリ電圧もほぼ一定となり許容範囲内で、かつ、許容値に近い値に抑えられる。
【0048】
なお、再始動が完了するまではモータの回転力をエンジンに伝達するためにスタータとエンジンは連結状態にあるので、エンジン回転数から間接的にモータ回転数を得ることもできる。
【0049】
図4のステップ401以降、つまりスタータとエンジンが連結状態にあるならば、エンジンの回転数からモータの回転数を間接的に計算することができる。図1に示すように、エンジン回転数を検知するエンジン回転検知センサ110Aを備える。多くの自動車には、エンジン回転検知センサ110Aを備えているので、検知されているエンジン回転数から間接的にスタータのモータの回転数を計算することで、新規にモータ回転検知センサ110を搭載する必要がなくなり、コスト低減に繋がる。エンジン回転数からスタータのモータ回転数を計算する際は、例えば次式(7)を使うことができる。
【0050】
【数7】
【0051】
ここで、Nm:モータの回転数[rpm]、Ne:エンジン回転数[rpm]、g:回転数変換係数である。
【0052】
式(7)における回転数変換係数gは、エンジンとモータのギヤ比によって得ることができる。具体的にはピニオンとリングギヤで連結されている場合はピニオンとリングギヤの歯数によって決まるギヤ比に加え、スタータ内部でモータとピニオンの間に減速機構を設けている場合は減速機構の減速比によって、回転数変換係数gを得ることができる。回転数変換係数は予め制御装置109に記憶させておき、検知されたエンジン回転数Neを元に制御装置109内部にてモータ回転数Nmに変換される。
【0053】
多くのスタータはモータからエンジンへ回転力を伝達する間にワンウェイクラッチを設け、スタータ側からのみ回転力を伝達する構成になっている。エンジンが燃焼を開始しスタータによる回転よりも回転数が速くなるとクラッチの接続が切れるようになっているため、この時エンジン回転数から計算したスタータ回転数と実際のスタータ回転数は一致しない。
【0054】
ここで、エンジン回転数から間接的にモータ回転数を計算する場合、計算した値と実際のモータ回転数に乖離が発生した時のモータ回転数を推測する方法について説明する。
【0055】
多くのスタータはモータからエンジンへ回転力を伝達する間にワンウェイクラッチ108を設け、スタータ側からのみ回転力を伝達する構成になっている。つまりモータの回転力によってエンジンを回転させることはできるが、エンジンがモータを回転させることはないため、実際のモータ回転数よりエンジン回転数から間接的に計算したモータ回転数の方が高い値を示すことがある。その時は、モータ回転数を推測する。
【0056】
ここで、図5を用いて、本実施形態によるエンジン始動装置において、モータの回転数の推測方法について説明する。
図5は、本発明の一実施形態によるエンジン始動装置において、モータの回転数の推測方法の内容を示すフローチャートである。
【0057】
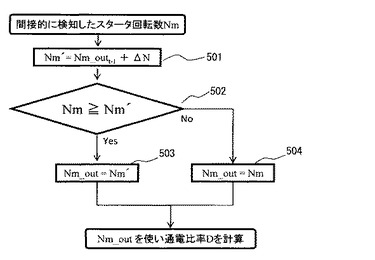
燃焼によりエンジン回転数が跳ね上がった際はクラッチの接続が切れ、ほぼ無負荷の状態となったモータは一定の傾きで回転数が上がると仮定したうえで、間接的に検知したモータ回転数Nmに対し、制御周期毎の回転数の上昇に上限を設けることでエンジン回転の急上昇に対しモータ回転数を推測する。
【0058】
ここで、検知したモータの回転数Nmに対し推測された回転数をNm_outとして、Nm_outを使い通電比率Dを計算する。これを制御周期毎に繰り返し、1制御周期前の計算結果をNm_outt−1として制御装置内で記憶しておく。また、制御周期毎のモータ回転数の上昇の上限としてΔNを予め設定しておく。
【0059】
そして、ステップ501にて、図1の制御装置109は、推測されたモータ回転数Nm_outt−1に上限値ΔNを加えて新しい推測されたモータ回転数Nm´とする。新たに推測されたモータ回転数Nm´は、1周期前のモータ回転数Nm_outt−1に対し1制御周期内で上昇し得る最大の値と考えられる。
【0060】
次に、ステップ502にて、制御装置109は、検知したモータ回転数NmとNm´を比較し実際のモータ回転数と乖離が発生しているかどうかを判定する。
【0061】
ステップ502にて、図1の判断手段109AがNm≧Nm´ではないと判定された場合は、検知した値と実際のモータ回転数に乖離はないと判断し、ステップ504にて、制御装置109は、Nm_outに検知した回転数Nmをそのまま代入し通電比率Dの計算に使う。
【0062】
ステップ502にて、Nm≧Nm´である場合は、検知した値と実際のモータ回転数に乖離があると判断する。その場合はステップ503にて、制御装置109は、Nm_outにNm´を代入し通電比率Dの計算に使う。
【0063】
こうすることで、エンジン回転数から間接的にモータ回転数を求めた場合に実際のモータ回転数と乖離が発生しても正しく通電比率Dを計算することができる。
【0064】
次に、図6を用いて、本実施形態によるエンジン始動装置における制御状態の一例について説明する。
図6は、本発明の一実施形態によるエンジン始動装置における制御状態の一例を示す波形図である。
【0065】
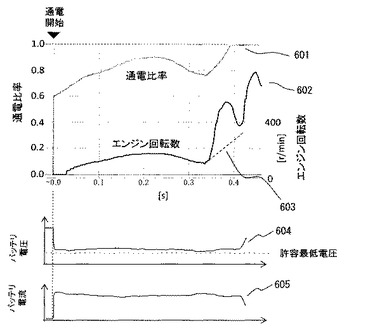
図6は、本実施形態のエンジン始動装置を実施した際の、エンジン回転数と制御装置109から出力された通電比率D、およびその時のバッテリ電圧とバッテリ電流の変化を示している。
【0066】
この例では、エンジン回転数のみを用いて通電比率を計算している。エンジン回転数より間接的にモータ回転数を検知しているため、推測したモータ回転数と実際とが乖離しモータの回転数の推測を行っている区間を点線で603に示す。なおこの推測したモータ回転数603はモータの回転数をモータとエンジンのギヤ比で持ってエンジン軸上の回転数に換算した値を示す。通電時のバッテリ電流605に示すように通電開始からほど横ばいで一定に保たれていて、ほぼ設定したバッテリ電流通りになっている。通電時のバッテリ電圧604も同様に横ばいで許容最低電圧を下回ることなくエンジンを再始動させたことがわかる。
【0067】
次に、図7を用いて、本実施形態によるエンジン始動装置における通電比率Dの他の決定方法について説明する。
図7は、本発明の一実施形態によるエンジン始動装置における通電比率Dの他の決定方法の説明図である。
【0068】
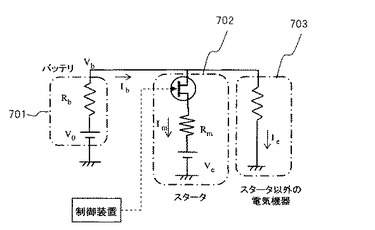
ここでは、スタータのモータ以外の機器の電力需要に合わせてモータに流す電流を適宜変更する方法について説明する。これまでは図3の簡易的な回路図にて示す通り、バッテリから流れる電流はほとんどモータに流れることを前提として説明したが、実際の車両ではスタータのモータ以外にも電流が流れる電気機器は存在する。
【0069】
図7は、スタータ以外の電気機器が存在する場合の簡易的な回路図を示している。バッテリ301を流れる電流をIb、スタータ302のモータに流れる電流をImとし、モータ以外の電気機器303に流れる電流をIeとすると、次式(8)に示す関係が成り立つ。
【0070】
【数8】
【0071】
ここで、Ib:バッテリを流れる電流、Im:モータを流れる電流、Ie:モータ以外の電気機器に流れる電流の合計である。
【0072】
式(8)に示すように、バッテリを流れる電流Ibはモータを流れる電流Imとモータ以外の電気機器を流れる電流Ieの和であるので、許容されるバッテリ電流からモータ以外の電気機器の電流Ieを差し引いた値をモータ電流として設定することで、トータルとしてバッテリ電流を一定にし許容される値に保つ構成にする。モータ以外の電気機器を流れる電流Ieは、直接的または間接的認知できる構成にする。例えば、モータ以外の電気機器を流れる電流Ieを電流センサによって直接計測するか、または、モータ以外の各電気機器の通常使用する電流を個々に予め制御装置に記憶させておき、その電気機器が使用されている場合には記憶しておいた電流が流れるものとして間接的にモータ以外の電気機器を流れる電流を算出する構成にしても良い。この時モータへの通電比率Dを計算する次式(9)を用いる。
【0073】
【数9】
【0074】
モータ以外の電気機器を流れる電流Ie変化しても、式(8)を用いてモータに流れる電流Imを決定しモータへの通電比率Dを式(9)を用いて計算することでバッテリ電流Ibを一定に保つことができ、バッテリの電圧降下を許容範囲に抑えながら最大限にエンジンを素早く再始動させることができる。
【0075】
以上説明したように、本実施形態によれば、モータ回転数をもとに通電比率を決定しモータ電流をほぼ一定の任意の値に保つことで、バッテリ電圧もほぼ一定に保つことができる。そうすることで、エンジン再始動時にバッテリ電圧は許容値を下回ることなく、なおかつ最大限にすばやくエンジンを再始動させる効果がある。
【0076】
また、エンジン回転数から間接的にモータの回転数を計算する場合、スタータに回転検出用のセンサを取り付ける必要がないためコスト低減に繋がる。
【0077】
さらに、モータ以外でバッテリを電源とする電気機器に流れる電流を検知しバッテリ電流をトータルで一定になるようにモータ制御する場合は、モータ以外の機器に大きな電流が流れてもバッテリの電圧降下を許容範囲内に抑えることができる。
【符号の説明】
【0078】
101…スタータ本体
102…マグネットスイッチ
103…ピニオン
104…リングギヤ
105…直流モータ
106…マグネットスイッチ通電用スイッチ
107…モータ通電用スイッチング素子
108…ワンウェイクラッチ
109,109A…制御装置
110,110A…回転検知センサ
【技術分野】
【0001】
本発明は、直流モータを用いてエンジンを始動させるエンジン始動装置および始動方法に係り、特に、アイドルストップシステムでエンジンを再始動する際に好適なエンジン始動装置および始動方法に関する。
【背景技術】
【0002】
近年の自動車においては、エネルギー資源の節約と環境保全を目的として、運転中に所定の条件が成立した時にエンジンを一時停止させるアイドルストップシステムを搭載したものがある。このアイドルストップシステムは、例えば信号待ちなどで運転者が車両を停止させる際などにエンジンを自動的に停止し、その後、運転者の再始動要求が生じた時点や、エンジンの稼働が必要になった時に自動的にエンジンを再始動するものである。エンジンを再始動させるにあたって、いわゆるピニオン押し出し式のスタータモータを用い、始動時にピニオンを押し出してピニオンをエンジン軸と直結されているリングギヤに噛合わせ、スタータモータによるクランキングによってエンジンを始動させる方法が多い。
【0003】
エンジンを始動させる際、スタータモータへの通電によりバッテリに電流が流れ、バッテリの特性上電流に対応して電圧が下がることが知られている。運転中も頻繁にエンジンを再始動させるアイドルストップシステムにおいては、電圧が下がると例えばカーナビゲーションシステムなどの電装品がリセットすることになる。このため、従来のアイドルストップシステムを搭載している車両は補助電源等で対応しているが、搭載性の悪化やコストアップに繋がる。
【0004】
一方で、従来、回路に抵抗を追加することで突入電流を低減しエンジン始動初期のバッテリ電圧降下を抑制し、その後は抵抗を短絡することで電流を流しクランキングトルクを確保するものが知られている(例えば、特許文献1参照)。
【0005】
また、他の例として、エンジン再始動時にスイッチング素子によってモータへの通電を制御し、PWM制御によりデューティ比を徐々に大きくしてモータの印加電圧を上昇させることで通電開始直後のバッテリ電圧降下を防止するものが知られている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2004−308645号公報
【特許文献2】特開2010−106825号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1や特許文献2記載のものでは、バッテリ電流が時間と共に低下するように制御されているため、スタータモータの出力トルクが減少し、エンジンのクランキングを十分に行えず、エンジン再始動に時間がかかる恐れがある。
【0008】
本発明の目的は、バッテリ電圧降下の許容範囲内で最大限に素早くエンジンを再始動させることができるエンジン始動装置および始動方法を提供することにある。
【課題を解決するための手段】
【0009】
(1)上記目的を達成するために、本発明は、直流モータの回転力をエンジンへ伝えてエンジンを始動させるエンジン始動装置であって、前記直流モータの回転数を検出する回転数検出手段と、前記直流モータへの通電をPWM制御する制御手段とを備え、前記制御手段は、前記回転数検出手段により検出された前記直流モータの回転数をもとに、前記直流モータに流れる電流が予め設定した一定値となるように前記PWM制御の通電比率を連続的に変化させ、これにより、モータ通電開始からエンジン始動完了までの間バッテリ電流はほぼ一定の設定した電流値として、バッテリ電圧も許容範囲内で、かつ、許容値に近い一定値に抑えるようにしたものである。
かかる構成により、バッテリ電圧降下の許容範囲内で最大限に素早くエンジンを再始動させることができるものとなる。
【0010】
(2)上記(1)において、好ましくは、前記制御手段は、前記直流モータへ流れる電流は直流モータへの通電をPWM制御する際の通電比率の2乗に比例すると近似できることを利用して通電比率を決定するようにしたものである。
【0011】
(3)上記(1)において、好ましくは、前記直流モータの回転数検出手段は、前記エンジンの回転数を間接的に利用し、前記直流モータの回転数を検出するようにしたものである。
【0012】
(4)上記(3)において、好ましくは、前記制御手段は、前記エンジンの回転数を間接的に利用して検出した前記直流モータの回転数が、実際の前記直流モータの回転数と乖離したことを判断する判断手段を備え、前記制御手段は、前記判断手段により、前記エンジンの回転数を間接的に利用して検出した前記直流モータの回転数が、実際の前記直流モータの回転数と乖離したことが判断された場合には、実際の前記直流モータの回転数を推測し、前記PWM制御の通電比率を決定する計算に利用するようにしたものである。
【0013】
(5)上記(1)において、好ましくは、前記制御手段は、前記直流モータ以外で前記バッテリを電源とする電気機器に流れる電流を元に、前記車両の電源を担うバッテリに流れる電流がトータルで所定の値となるように、前記直流モータに流す電流を変化させ、前記PWM制御の通電比率を決定するようにしたものである。
【0014】
(6)また、上記目的を達成するために、本発明は、直流モータの回転力をエンジンへ伝えてエンジンを始動させるエンジン始動方法であって、回転数検出手段により検出された直流モータの回転数をもとに、前記直流モータに流れる電流が予め設定した一定値となるように前記PWM制御の通電比率を連続的に変化させるものであり、ここで、モータ通電開始からエンジン始動完了までの間バッテリ電流はほぼ一定の設定した電流値として、バッテリ電圧も許容範囲内で、かつ、許容値に近い一定値に抑えるようにしたものである。
かかる方法により、バッテリ電圧降下の許容範囲内で最大限に素早くエンジンを再始動させることができるものとなる。
【発明の効果】
【0015】
本発明によれば、バッテリ電圧降下の許容範囲内で最大限に素早くエンジンを再始動させることができるものとなる。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施形態によるエンジン始動装置の構成図である。
【図2】本発明の一実施形態によるエンジン始動装置に用いるPWM制御の通電信号の説明図である。
【図3】本発明の一実施形態によるエンジン始動装置における通電比率Dの決定方法の説明図である。
【図4】本発明の一実施形態によるエンジン始動装置におけるエンジンの始動方法の内容を示すフローチャートである。
【図5】本発明の一実施形態によるエンジン始動装置において、モータの回転数の推測方法の内容を示すフローチャートである。
【図6】本発明の一実施形態によるエンジン始動装置における制御状態の一例を示す波形図である。
【図7】本発明の一実施形態によるエンジン始動装置における通電比率Dの他の決定方法の説明図である。
【発明を実施するための形態】
【0017】
以下、図1〜図7を用いて、本発明の一実施形態によるエンジン始動装置の構成及び動作について説明する。
最初に、図1を用いて、本実施形態によるエンジン始動装置の構成について説明する。
図1は、本発明の一実施形態によるエンジン始動装置の構成図である。
【0018】
図1に示すように、スタータ101は、大きく分けて、マグネットスイッチ102と、ピニオンギヤ103と、モータ105とによって構成される。モータ105は、いわゆる直流モータであり、直流の電圧を付加することで回転駆動力が発生する。ピニオンギヤ103は、必要な時にマグネットスイッチ102がレバーを引っ張ることでモータ回転軸上を移動し、エンジン軸と直結されているリングギヤ104と噛み合う。ピニオンギヤ103とリングギヤ104とが噛合った状態であれば、モータ105に通電することでモータ105は回転し、モータ105の回転力はピニオンギヤ108を通じてリングギヤ104に伝達されエンジンを回す構造にする。
【0019】
制御装置109は、通常の燃料噴射、点火、空気制御(電子制御スロットル)に加え、ブレーキペダル状態、車速等の各種情報より、アイドルストップを制御する。
【0020】
モータ回転検知センサ110は、モータの回転を検知する。検知されたモータ回転数の情報は、制御装置109に入力される。なお、モータの回転を直接センサで検知するのに代えて、エンジン回転検知センサ110Aを用いてエンジン回転を使って間接的にモータの回転数を検知する構成にしても良い。
【0021】
マグネットスイッチ105は、スイッチ106を介して制御装置109によって制御される。スイッチ106は、例えば機械式リレースイッチを使うことができる。また、モータ105への通電も、スイッチング素子107を介して制御装置109によって制御される。スイッチング素子107は、例えばMOSFETなどの半導体を用いたスイッチング素子を使うことができる。
【0022】
次に、図2を用いて、本実施形態によるエンジン始動装置に用いるPWM制御の通電信号について説明する。
図2は、本発明の一実施形態によるエンジン始動装置に用いるPWM制御の通電信号の説明図である。
【0023】
制御装置109は、図2に示すPWM信号を通電信号として出力する。
【0024】
図2で示すTは、PWM制御の1周期の長さであり、例えばPWM制御の周波数を10KHzに設定した場合は、Tは0.1msとなる。本実施形態では、モータの電気的時定数よりも十分に速くなるようにPWM制御の周波数を決定する。
【0025】
図2に示すTONは1周期の中でモータへの通電を行う区間である。通電比率Dを次式(1)のように、1周期の中での通電する区間の割合と定義する。
【0026】
【数1】
【0027】
ここで、D:PWM制御における通電比率、TON:1周期の中でモータへ通電する区間[s]、T:1周期の長さ[s]である。
【0028】
通電比率Dは、0.0〜1.0の間で変化させることができる変数である。制御装置109は、通電比率Dを変えることで、モータへの通電量を制御する。
【0029】
次に、図3を用いて、本実施形態によるエンジン始動装置における通電比率Dの決定方法について説明する。
図3は、本発明の一実施形態によるエンジン始動装置における通電比率Dの決定方法の説明図である。
【0030】
図3は、バッテリとスタータの簡易的な回路図を示している。バッテリ301は内部抵抗Rbを有し、バッテリの初期電圧をV0とすると、バッテリの出力電圧Vbは、次式(2)によって決まる。
【0031】
【数2】
【0032】
ここで、Vb:バッテリの出力電圧[V]、V0:バッテリの初期電圧(電流が流れていない時の電圧)[V]、Ib:バッテリを流れる電流[A]、Rb:バッテリの内部抵抗[Ω]である。
【0033】
式(2)から分かるように、バッテリ電圧はバッテリ電流によって決められ、電流を所定の値にコントロールできればバッテリ電圧も所定の値にコントロールすることができる。図3のモータ部302も同様に、配線やモータ内部の抵抗、スイッチング素子の抵抗などをまとめてモータ抵抗Rmとした時、バッテリ電圧Vbは、次式(3)によって表すことができる。
【0034】
【数3】
【0035】
ここで、Vb:バッテリの出力電圧[V]、Ib:バッテリを流れる電流 [A]、Rm:モータの抵抗(配線抵抗、内部抵抗、スイッチング素子の抵抗を含む)[Ω]、Ve:モータ回転による逆起電圧[V]、ke:モータの逆起電圧係数[V/rpm]、Nm:モータの回転数[rpm]である。
【0036】
ここで、式(2),式(3)により、次式(4)の関係が得られる。
【0037】
【数4】
【0038】
式(4)から分かるように、一般的には直流モータにおいて回転数Nmが0の時、つまり通電し始めの時に電流が一番多く流れ、回転数が速くなれば電流は少なくなることが知られている。
【0039】
ここで、PWM制御の通電比率Dを変化させることで電流を一定に制御するために、発明者らの研究では通電比率に対し電流は次式で近似できることを発見した。
【0040】
【数5】
【0041】
式(5)から分かるように、本実施形態ではPWM制御においてバッテリに流れる電流Ibは通電比率Dの2乗に比例するとする。なお、図3に示す構成では、モータ302に流れるモータ電流Imは、バッテリ電流Ibに等しいため、モータへ流れる電流Imは直流モータへの通電をPWM制御する際の通電比率Dの2乗に比例すると近似できる。この関係性は発明者らの研究により実験的に観測したうえで理論的に決定したものである。ただし、式(5)はPWMの1周期がモータの電気的時定数に対し十分速いと見なせる範囲においてのみ成立する近似であり、バッテリ電流Ibが定数とモータ回転数Nm、通電比率Dの二つの変数によって決められることを表している。この関係を逆に利用し、所定のバッテリ電流Ibになるように通電比率Dを決めるには、式(5)を次式(6)のように変形する。
【0042】
【数6】
【0043】
式(6)により、本実施形態では、バッテリ電流Ibを所定の値に設定したうえで、モータ回転数Nmにより通電比率Dを連続的に決定する。ただし式(6)によって計算された通電比率Dが1.0を超えた場合は通電比率を1.0とする。実際のシステムへ組込む際は、まずバッテリの電圧降下の許容値を元に、式(2)を用いて許容されるバッテリ電流を事前に決定する。バッテリの許容最低電圧は、例えば、10.5Vに設定される。そしてこのバッテリ電流値を含む、式(6)においてモータ回転数Nm以外の変数を予め計測するなどしたうえで、制御装置109に予め記憶させておく。
【0044】
次に、図4を用いて、本実施形態によるエンジン始動装置におけるエンジンの始動方法について説明する。
図4は、本発明の一実施形態によるエンジン始動装置におけるエンジンの始動方法の内容を示すフローチャートである。
【0045】
図4に示すように、エンジンの再始動要請が発生すると、ステップ401にて、図1に示した制御装置109は、スタータとエンジンを連結させる。ピニオン押出し方式の場合は、図1のピニオン103を押し出し、エンジンに直結されているリングギヤ104と噛合わせる。アイドルストップ中はスタータとエンジンが連結状態にあるアイドルストップ方式で、再始動要請が発生した時に既にスタータとエンジンが連結状態の場合は、ステップ401は必要ない。
【0046】
次に、ステップ402にて、制御装置109は、予め記憶しておいた変数とモータの回転数Nmを利用し、式(6)にてPWM制御の通電比率Dを計算し、PWM制御の波形を出力する。PWM制御によりモータに電流が流れ始め、モータのトルクがエンジンに伝達され回転を始める。
【0047】
そして、制御装置109は、ステップ403に示すエンジン始動完了条件が成立するまで、ステップ402の計算を継続する。ステップ403のエンジン始動完了条件は、例えばエンジン回転が所定の回転数以上になったことでエンジン始動が完了したと判断することができる。エンジン始動完了までは、制御装置109は、一定間隔(例えば2ms)でモータ回転数を検知し、通電比率Dを計算し出力を更新する。こうすることでモータ通電開始からエンジン始動完了までの間バッテリ電流はほぼ一定で、設定した電流値となるためバッテリ電圧もほぼ一定となり許容範囲内で、かつ、許容値に近い値に抑えられる。
【0048】
なお、再始動が完了するまではモータの回転力をエンジンに伝達するためにスタータとエンジンは連結状態にあるので、エンジン回転数から間接的にモータ回転数を得ることもできる。
【0049】
図4のステップ401以降、つまりスタータとエンジンが連結状態にあるならば、エンジンの回転数からモータの回転数を間接的に計算することができる。図1に示すように、エンジン回転数を検知するエンジン回転検知センサ110Aを備える。多くの自動車には、エンジン回転検知センサ110Aを備えているので、検知されているエンジン回転数から間接的にスタータのモータの回転数を計算することで、新規にモータ回転検知センサ110を搭載する必要がなくなり、コスト低減に繋がる。エンジン回転数からスタータのモータ回転数を計算する際は、例えば次式(7)を使うことができる。
【0050】
【数7】
【0051】
ここで、Nm:モータの回転数[rpm]、Ne:エンジン回転数[rpm]、g:回転数変換係数である。
【0052】
式(7)における回転数変換係数gは、エンジンとモータのギヤ比によって得ることができる。具体的にはピニオンとリングギヤで連結されている場合はピニオンとリングギヤの歯数によって決まるギヤ比に加え、スタータ内部でモータとピニオンの間に減速機構を設けている場合は減速機構の減速比によって、回転数変換係数gを得ることができる。回転数変換係数は予め制御装置109に記憶させておき、検知されたエンジン回転数Neを元に制御装置109内部にてモータ回転数Nmに変換される。
【0053】
多くのスタータはモータからエンジンへ回転力を伝達する間にワンウェイクラッチを設け、スタータ側からのみ回転力を伝達する構成になっている。エンジンが燃焼を開始しスタータによる回転よりも回転数が速くなるとクラッチの接続が切れるようになっているため、この時エンジン回転数から計算したスタータ回転数と実際のスタータ回転数は一致しない。
【0054】
ここで、エンジン回転数から間接的にモータ回転数を計算する場合、計算した値と実際のモータ回転数に乖離が発生した時のモータ回転数を推測する方法について説明する。
【0055】
多くのスタータはモータからエンジンへ回転力を伝達する間にワンウェイクラッチ108を設け、スタータ側からのみ回転力を伝達する構成になっている。つまりモータの回転力によってエンジンを回転させることはできるが、エンジンがモータを回転させることはないため、実際のモータ回転数よりエンジン回転数から間接的に計算したモータ回転数の方が高い値を示すことがある。その時は、モータ回転数を推測する。
【0056】
ここで、図5を用いて、本実施形態によるエンジン始動装置において、モータの回転数の推測方法について説明する。
図5は、本発明の一実施形態によるエンジン始動装置において、モータの回転数の推測方法の内容を示すフローチャートである。
【0057】
燃焼によりエンジン回転数が跳ね上がった際はクラッチの接続が切れ、ほぼ無負荷の状態となったモータは一定の傾きで回転数が上がると仮定したうえで、間接的に検知したモータ回転数Nmに対し、制御周期毎の回転数の上昇に上限を設けることでエンジン回転の急上昇に対しモータ回転数を推測する。
【0058】
ここで、検知したモータの回転数Nmに対し推測された回転数をNm_outとして、Nm_outを使い通電比率Dを計算する。これを制御周期毎に繰り返し、1制御周期前の計算結果をNm_outt−1として制御装置内で記憶しておく。また、制御周期毎のモータ回転数の上昇の上限としてΔNを予め設定しておく。
【0059】
そして、ステップ501にて、図1の制御装置109は、推測されたモータ回転数Nm_outt−1に上限値ΔNを加えて新しい推測されたモータ回転数Nm´とする。新たに推測されたモータ回転数Nm´は、1周期前のモータ回転数Nm_outt−1に対し1制御周期内で上昇し得る最大の値と考えられる。
【0060】
次に、ステップ502にて、制御装置109は、検知したモータ回転数NmとNm´を比較し実際のモータ回転数と乖離が発生しているかどうかを判定する。
【0061】
ステップ502にて、図1の判断手段109AがNm≧Nm´ではないと判定された場合は、検知した値と実際のモータ回転数に乖離はないと判断し、ステップ504にて、制御装置109は、Nm_outに検知した回転数Nmをそのまま代入し通電比率Dの計算に使う。
【0062】
ステップ502にて、Nm≧Nm´である場合は、検知した値と実際のモータ回転数に乖離があると判断する。その場合はステップ503にて、制御装置109は、Nm_outにNm´を代入し通電比率Dの計算に使う。
【0063】
こうすることで、エンジン回転数から間接的にモータ回転数を求めた場合に実際のモータ回転数と乖離が発生しても正しく通電比率Dを計算することができる。
【0064】
次に、図6を用いて、本実施形態によるエンジン始動装置における制御状態の一例について説明する。
図6は、本発明の一実施形態によるエンジン始動装置における制御状態の一例を示す波形図である。
【0065】
図6は、本実施形態のエンジン始動装置を実施した際の、エンジン回転数と制御装置109から出力された通電比率D、およびその時のバッテリ電圧とバッテリ電流の変化を示している。
【0066】
この例では、エンジン回転数のみを用いて通電比率を計算している。エンジン回転数より間接的にモータ回転数を検知しているため、推測したモータ回転数と実際とが乖離しモータの回転数の推測を行っている区間を点線で603に示す。なおこの推測したモータ回転数603はモータの回転数をモータとエンジンのギヤ比で持ってエンジン軸上の回転数に換算した値を示す。通電時のバッテリ電流605に示すように通電開始からほど横ばいで一定に保たれていて、ほぼ設定したバッテリ電流通りになっている。通電時のバッテリ電圧604も同様に横ばいで許容最低電圧を下回ることなくエンジンを再始動させたことがわかる。
【0067】
次に、図7を用いて、本実施形態によるエンジン始動装置における通電比率Dの他の決定方法について説明する。
図7は、本発明の一実施形態によるエンジン始動装置における通電比率Dの他の決定方法の説明図である。
【0068】
ここでは、スタータのモータ以外の機器の電力需要に合わせてモータに流す電流を適宜変更する方法について説明する。これまでは図3の簡易的な回路図にて示す通り、バッテリから流れる電流はほとんどモータに流れることを前提として説明したが、実際の車両ではスタータのモータ以外にも電流が流れる電気機器は存在する。
【0069】
図7は、スタータ以外の電気機器が存在する場合の簡易的な回路図を示している。バッテリ301を流れる電流をIb、スタータ302のモータに流れる電流をImとし、モータ以外の電気機器303に流れる電流をIeとすると、次式(8)に示す関係が成り立つ。
【0070】
【数8】
【0071】
ここで、Ib:バッテリを流れる電流、Im:モータを流れる電流、Ie:モータ以外の電気機器に流れる電流の合計である。
【0072】
式(8)に示すように、バッテリを流れる電流Ibはモータを流れる電流Imとモータ以外の電気機器を流れる電流Ieの和であるので、許容されるバッテリ電流からモータ以外の電気機器の電流Ieを差し引いた値をモータ電流として設定することで、トータルとしてバッテリ電流を一定にし許容される値に保つ構成にする。モータ以外の電気機器を流れる電流Ieは、直接的または間接的認知できる構成にする。例えば、モータ以外の電気機器を流れる電流Ieを電流センサによって直接計測するか、または、モータ以外の各電気機器の通常使用する電流を個々に予め制御装置に記憶させておき、その電気機器が使用されている場合には記憶しておいた電流が流れるものとして間接的にモータ以外の電気機器を流れる電流を算出する構成にしても良い。この時モータへの通電比率Dを計算する次式(9)を用いる。
【0073】
【数9】
【0074】
モータ以外の電気機器を流れる電流Ie変化しても、式(8)を用いてモータに流れる電流Imを決定しモータへの通電比率Dを式(9)を用いて計算することでバッテリ電流Ibを一定に保つことができ、バッテリの電圧降下を許容範囲に抑えながら最大限にエンジンを素早く再始動させることができる。
【0075】
以上説明したように、本実施形態によれば、モータ回転数をもとに通電比率を決定しモータ電流をほぼ一定の任意の値に保つことで、バッテリ電圧もほぼ一定に保つことができる。そうすることで、エンジン再始動時にバッテリ電圧は許容値を下回ることなく、なおかつ最大限にすばやくエンジンを再始動させる効果がある。
【0076】
また、エンジン回転数から間接的にモータの回転数を計算する場合、スタータに回転検出用のセンサを取り付ける必要がないためコスト低減に繋がる。
【0077】
さらに、モータ以外でバッテリを電源とする電気機器に流れる電流を検知しバッテリ電流をトータルで一定になるようにモータ制御する場合は、モータ以外の機器に大きな電流が流れてもバッテリの電圧降下を許容範囲内に抑えることができる。
【符号の説明】
【0078】
101…スタータ本体
102…マグネットスイッチ
103…ピニオン
104…リングギヤ
105…直流モータ
106…マグネットスイッチ通電用スイッチ
107…モータ通電用スイッチング素子
108…ワンウェイクラッチ
109,109A…制御装置
110,110A…回転検知センサ
【特許請求の範囲】
【請求項1】
直流モータの回転力をエンジンへ伝えてエンジンを始動させるエンジン始動装置であって、
前記直流モータの回転数を検出する回転数検出手段と、
前記直流モータへの通電をPWM制御する制御手段とを備え、
前記制御手段は、前記回転数検出手段により検出された前記直流モータの回転数をもとに、前記直流モータに流れる電流が予め設定した一定値となるように前記PWM制御の通電比率を連続的に変化させ、
これにより、モータ通電開始からエンジン始動完了までの間バッテリ電流はほぼ一定の設定した電流値として、バッテリ電圧も許容範囲内で、かつ、許容値に近い一定値に抑えることを特徴とするエンジン始動装置。
【請求項2】
請求項1記載のエンジン始動装置において、
前記制御手段は、前記直流モータへ流れる電流は直流モータへの通電をPWM制御する際の通電比率の2乗に比例すると近似できることを利用して通電比率を決定することを特徴とするエンジン始動装置。
【請求項3】
請求項1記載のエンジン始動装置において、
前記直流モータの回転数検出手段は、前記エンジンの回転数を間接的に利用し、前記直流モータの回転数を検出することを特徴とするエンジン始動装置。
【請求項4】
請求項3記載のエンジン始動装置において、
前記制御手段は、前記エンジンの回転数を間接的に利用して検出した前記直流モータの回転数が、実際の前記直流モータの回転数と乖離したことを判断する判断手段を備え、
前記制御手段は、前記判断手段により、前記エンジンの回転数を間接的に利用して検出した前記直流モータの回転数が、実際の前記直流モータの回転数と乖離したことが判断された場合には、実際の前記直流モータの回転数を推測し、前記PWM制御の通電比率を決定する計算に利用することを特徴とするエンジン始動装置。
【請求項5】
請求項1記載のエンジン始動装置において、
前記制御手段は、前記直流モータ以外で前記バッテリを電源とする電気機器に流れる電流を元に、前記車両の電源を担うバッテリに流れる電流がトータルで所定の値となるように、前記直流モータに流す電流を変化させ、前記PWM制御の通電比率を決定することを特徴とするエンジン始動装置。
【請求項6】
直流モータの回転力をエンジンへ伝えてエンジンを始動させるエンジン始動方法であって、
回転数検出手段により検出された直流モータの回転数をもとに、前記直流モータに流れる電流が予め設定した一定値となるように前記PWM制御の通電比率を連続的に変化させるものであり、
ここで、モータ通電開始からエンジン始動完了までの間バッテリ電流はほぼ一定の設定した電流値として、バッテリ電圧も許容範囲内で、かつ、許容値に近い一定値に抑えることを特徴とするエンジン始動方法。
【請求項1】
直流モータの回転力をエンジンへ伝えてエンジンを始動させるエンジン始動装置であって、
前記直流モータの回転数を検出する回転数検出手段と、
前記直流モータへの通電をPWM制御する制御手段とを備え、
前記制御手段は、前記回転数検出手段により検出された前記直流モータの回転数をもとに、前記直流モータに流れる電流が予め設定した一定値となるように前記PWM制御の通電比率を連続的に変化させ、
これにより、モータ通電開始からエンジン始動完了までの間バッテリ電流はほぼ一定の設定した電流値として、バッテリ電圧も許容範囲内で、かつ、許容値に近い一定値に抑えることを特徴とするエンジン始動装置。
【請求項2】
請求項1記載のエンジン始動装置において、
前記制御手段は、前記直流モータへ流れる電流は直流モータへの通電をPWM制御する際の通電比率の2乗に比例すると近似できることを利用して通電比率を決定することを特徴とするエンジン始動装置。
【請求項3】
請求項1記載のエンジン始動装置において、
前記直流モータの回転数検出手段は、前記エンジンの回転数を間接的に利用し、前記直流モータの回転数を検出することを特徴とするエンジン始動装置。
【請求項4】
請求項3記載のエンジン始動装置において、
前記制御手段は、前記エンジンの回転数を間接的に利用して検出した前記直流モータの回転数が、実際の前記直流モータの回転数と乖離したことを判断する判断手段を備え、
前記制御手段は、前記判断手段により、前記エンジンの回転数を間接的に利用して検出した前記直流モータの回転数が、実際の前記直流モータの回転数と乖離したことが判断された場合には、実際の前記直流モータの回転数を推測し、前記PWM制御の通電比率を決定する計算に利用することを特徴とするエンジン始動装置。
【請求項5】
請求項1記載のエンジン始動装置において、
前記制御手段は、前記直流モータ以外で前記バッテリを電源とする電気機器に流れる電流を元に、前記車両の電源を担うバッテリに流れる電流がトータルで所定の値となるように、前記直流モータに流す電流を変化させ、前記PWM制御の通電比率を決定することを特徴とするエンジン始動装置。
【請求項6】
直流モータの回転力をエンジンへ伝えてエンジンを始動させるエンジン始動方法であって、
回転数検出手段により検出された直流モータの回転数をもとに、前記直流モータに流れる電流が予め設定した一定値となるように前記PWM制御の通電比率を連続的に変化させるものであり、
ここで、モータ通電開始からエンジン始動完了までの間バッテリ電流はほぼ一定の設定した電流値として、バッテリ電圧も許容範囲内で、かつ、許容値に近い一定値に抑えることを特徴とするエンジン始動方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−113228(P2013−113228A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−260943(P2011−260943)
【出願日】平成23年11月29日(2011.11.29)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月29日(2011.11.29)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
[ Back to top ]