
オブジェクト表示装置、オブジェクト表示方法及びオブジェクト表示プログラム
【課題】AR技術において、現実空間の画像にオブジェクトを重畳表示させた重畳画像における、オブジェクトの画像の違和感を軽減する。
【解決手段】オブジェクト表示装置1は、現実空間の画像を取得する撮影部11、現実空間の画像から検出された複数の特徴物又は現実空間の画像全体から画像に関する所定の特徴を抽出する画像特徴抽出部12、画像に関する所定の特徴に基づきオブジェクトの画像を補正処理する画像処理部18及び補正処理されたオブジェクトを現実空間の画像に重畳した重畳画像を表示する表示部19を備える。これにより、重畳画像におけるオブジェクトの画像に対して現実空間の画像の特徴が適切に反映される。
【解決手段】オブジェクト表示装置1は、現実空間の画像を取得する撮影部11、現実空間の画像から検出された複数の特徴物又は現実空間の画像全体から画像に関する所定の特徴を抽出する画像特徴抽出部12、画像に関する所定の特徴に基づきオブジェクトの画像を補正処理する画像処理部18及び補正処理されたオブジェクトを現実空間の画像に重畳した重畳画像を表示する表示部19を備える。これにより、重畳画像におけるオブジェクトの画像に対して現実空間の画像の特徴が適切に反映される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、オブジェクト表示装置、オブジェクト表示方法及びオブジェクト表示プログラムに関する。
【背景技術】
【0002】
近年において、AR(Augmented Reality:拡張現実)技術を用いたサービスが開発・提供されている。例えば、移動端末の所在位置の周辺に配置されたオブジェクトを取得し、移動端末に備えられたカメラにより取得した現実空間の画像に種々の情報や画像を含むオブジェクトを重畳表示する技術が知られている。また、移動端末のカメラにより取得された現実空間の画像から所定のマーカを検出し、当該マーカに対応付けられたオブジェクトを現実空間の画像に重畳してディスプレイに表示する技術が知られている。一方、オブジェクトを現実空間の画像に重畳する際の、現実空間の映像におけるオブジェクトの色調を考慮するための技術として現実空間に配置されたマーカの色調に基づきオブジェクトの色調を補正する技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−170316号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
現実空間の画像にオブジェクトが重畳された重畳画像におけるオブジェクトの違和感を軽減するためには、現実空間の画像の特徴がオブジェクトの画像に反映されることが好ましい。しかしながら、特許文献1に記載された従来の技術では、現実空間に配置された一のマーカの色調に基づきオブジェクトの色調の補正が行われるので、画像中における限られた一の領域に現実空間の画像の特徴を代表させることとなる。マーカの色調が現実空間の画像の特徴を代表しているとは限らないので、上記した従来技術では、オブジェクトの画像に対して適切な補正が行われず、重畳画像において違和感が生じる場合があった。
【0005】
そこで、本発明は、上記問題点に鑑みてなされたものであり、AR技術において、現実空間の画像にオブジェクトを重畳表示させた重畳画像における、オブジェクトの画像の違和感を軽減することが可能なオブジェクト表示装置、オブジェクト表示方法及びオブジェクト表示プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のオブジェクト表示装置は、現実空間の画像にオブジェクトを重畳表示するオブジェクト表示装置であって、現実空間の画像を取得する撮影手段と、撮影手段により取得された現実空間の画像から検出された複数の所定の特徴領域又は現実空間の画像全体の、画像に関する所定の特徴を抽出する画像特徴抽出手段と、画像特徴抽出手段により抽出された所定の特徴に基づき、オブジェクトの画像を補正処理する画像処理手段と、画像処理手段により補正処理されたオブジェクトの画像を、現実空間の画像に重畳した重畳画像を表示する表示手段とを備える。
【0007】
また、上記課題を解決するために、本発明のオブジェクト表示方法は、現実空間の画像にオブジェクトを重畳表示するオブジェクト表示装置におけるオブジェクト表示方法であって、現実空間の画像を取得する撮影ステップと、撮影ステップにおいて取得された現実空間の画像から検出された複数の特徴領域又は現実空間の画像全体の、画像に関する所定の特徴を抽出する画像特徴抽出ステップと、画像特徴抽出ステップにおいて抽出された所定の特徴に基づき、オブジェクトの画像を補正処理する画像処理ステップと、画像処理ステップにおいて補正処理されたオブジェクトの画像を、現実空間の画像に重畳した重畳画像を表示する表示ステップとを有する。
【0008】
また、上記課題を解決するために、本発明のオブジェクト表示プログラムは、コンピュータを、現実空間の画像にオブジェクトを重畳表示するオブジェクト表示装置として機能させるためのオブジェクト表示プログラムであって、コンピュータに、現実空間の画像を取得する撮影機能と、撮影機能により取得された現実空間の画像から検出された複数の特徴領域又は現実空間の画像全体の、画像に関する所定の特徴を抽出する画像特徴抽出機能と、画像特徴抽出機能により抽出された所定の特徴に基づき、オブジェクトの画像を補正処理する画像処理機能と、画像処理機能により補正処理されたオブジェクトの画像を、現実空間の画像に重畳した重畳画像を表示する表示機能とを実現させる。
【0009】
本発明のオブジェクト表示装置、オブジェクト表示方法及びオブジェクト表示プログラムによれば、現実空間の画像から検出された複数の特徴領域又は現実空間の画像全体から抽出された画像に関する所定の特徴に基づきオブジェクトの画像が補正処理されるので、オブジェクトの画像に対して現実空間の画像の特徴が適切に反映される。従って、現実空間の画像にオブジェクトを重畳表示させた重畳画像におけるオブジェクトの画像の違和感が軽減される。
【0010】
また、本発明のオブジェクト表示装置では、画像特徴抽出手段は、特徴領域が検出されなかった場合に、現実空間の画像全体から所定の特徴を抽出することとしてもよい。
【0011】
上記構成によれば、まず所定の特徴領域の検出が試みられ、オブジェクトの画像の補正に用いられる特徴が、検出された特徴領域の画像から抽出されるので、オブジェクトの画像の補正に用いられる特徴の抽出が容易である。また、特徴領域が検出されなかった場合であっても、現実空間の画像から抽出された所定の特徴がオブジェクトの画像の補正に用いられるので、オブジェクトの画像の適切な補正の実施が可能である。
【0012】
また、本発明のオブジェクト表示装置は、少なくとも特徴領域の色調に関する特徴領域情報を当該特徴領域に対応付けて記憶している特徴領域情報記憶手段を備え、画像特徴抽出手段は、特徴領域情報記憶手段に記憶された色調に対する、現実空間の画像における複数の特徴領域の色調の変化量を抽出し、画像処理手段は、画像特徴抽出手段により抽出された色調の変化量に基づきオブジェクトの画像を補正処理することとしてもよい。
【0013】
上記構成によれば、検出された特徴領域に関して予め記憶された色調に対する、現実空間の画像における当該特徴領域の色調の変化量に基づき、オブジェクトの画像の色調が補正される。これにより、オブジェクトの画像に対して、現実空間の画像の色調が適切に反映される。
【0014】
また、本発明のオブジェクト表示装置では、画像処理手段は、現実空間の画像における特徴領域の位置に対するオブジェクトの重畳位置に応じて、オブジェクトの画像を補正処理する。
【0015】
上記構成によれば、特徴領域の色調の変化量のオブジェクトの色調に対する反映の度合いが、特徴領域とオブジェクトとの位置関係に応じて考慮される。これにより、オブジェクトの色調がより適切に補正されるので、一層の違和感の軽減が実現される。
【0016】
また、本発明のオブジェクト表示装置では、画像特徴抽出手段は、現実空間の画像全体の色調に関する特徴を抽出し、画像処理手段は、画像特徴抽出手段により抽出された現実空間の画像全体の色調に関する特徴に基づき補正処理することとしてもよい。
【0017】
上記構成によれば、現実空間の画像全体の色調がオブジェクトの色調に反映されることとなるので、重畳画像におけるオブジェクトの違和感が軽減される。
【0018】
また、本発明のオブジェクト表示装置では、画像特徴抽出手段は、現実空間の画像におけるノイズの分布に関する特徴を抽出し、画像処理手段は、画像特徴抽出手段により抽出されたノイズの分布に関する特徴に基づき補正処理することとしてもよい。
【0019】
現実空間の画像にノイズがある場合において、ノイズがないオブジェクトの画像が重畳されると、重畳画像において違和感が生じる。上記構成によれば、現実空間の画像におけるノイズの分布に関する特徴が、オブジェクトの画像に反映されるので、重畳画像における違和感が軽減される。
【発明の効果】
【0020】
AR技術において、現実空間の画像にオブジェクトを重畳表示させた重畳画像における、オブジェクトの画像の違和感を軽減することが可能となる。
【図面の簡単な説明】
【0021】
【図1】オブジェクト表示装置の機能的構成を示すブロック図である。
【図2】オブジェクト表示装置のハードブロック図である。
【図3】撮影部により取得される現実空間の画像の例を示す図である。
【図4】撮影部により取得される現実空間の画像の例を示す図である。
【図5】撮影部により取得される現実空間の画像の例を示す図である。
【図6】特徴領域情報記憶部の構成及び記憶されているデータの例を示す図である。
【図7】色調変化量測定部における、特徴領域の色調の変化量を抽出するための色調テーブルの例を示す図である。
【図8】仮想オブジェクト記憶部の構成及び記憶されているデータの例を示す図である。
【図9】特徴領域の色調の変化量に基づくオブジェクトの色調の補正処理の例を示す図である。
【図10】特徴領域の色調の変化量に基づくオブジェクトの色調の補正処理の例を示す図である。
【図11】特徴領域の色調の変化量に基づくオブジェクトの色調の補正処理の例を示す図である。
【図12】特徴領域の色調の変化量に基づくオブジェクトの色調の補正処理の例を示す図である。
【図13】現実空間の画像全体の色調に基づく補正処理の例を示す図である。
【図14】現実空間の画像全体のノイズ分布に基づく補正処理の例を示す図である。
【図15】オブジェクト表示方法の処理内容を示すフローチャートである。
【図16】オブジェクト表示方法の処理内容を示すフローチャートである。
【図17】オブジェクト表示方法の処理内容を示すフローチャートである。
【図18】特徴領域の色調の変化量に基づく補正処理を示すフローチャートである。
【図19】現実空間の画像全体の特徴に基づく補正処理を示すフローチャートである。
【図20】オブジェクト表示プログラムの構成を示す図である。
【発明を実施するための形態】
【0022】
本発明に係るオブジェクト表示装置、オブジェクト表示方法及びオブジェクト表示プログラムの実施形態について図面を参照して説明する。なお、可能な場合には、同一の部分には同一の符号を付して、重複する説明を省略する。
【0023】
図1は、オブジェクト表示装置1の機能的構成を示すブロック図である。本実施形態のオブジェクト表示装置1は、現実空間の画像にオブジェクトを重畳表示する装置であって、例えば、移動体通信網を介した通信が可能な携帯端末である。
【0024】
移動端末等の装置を用いたAR技術によるサービスとしては、例えば、移動端末のカメラにより取得された現実空間の画像から所定のマーカを検出し、当該マーカに対応付けられたオブジェクトを現実空間の画像に重畳してディスプレイに表示するものがある。マーカは、現実空間中に予め人為的に設けられた物であってもよいし、現実空間中に存在する建物及び看板等の構造物並びにロゴマーク等であってもよい。また、同様のサービスとしては、移動端末が所在する位置情報に基づき移動端末の所在位置の周辺に配置されたオブジェクトを取得し、移動端末に備えられたカメラにより取得した現実空間の画像中の位置に対応付けてオブジェクトを重畳表示するものがある。本実施形態のオブジェクト表示装置1では、上記したAR技術によるサービスの両態様が想定される。
【0025】
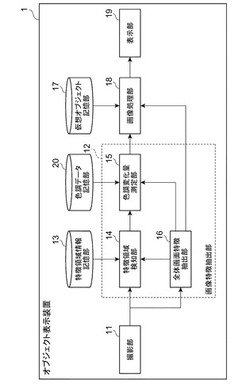
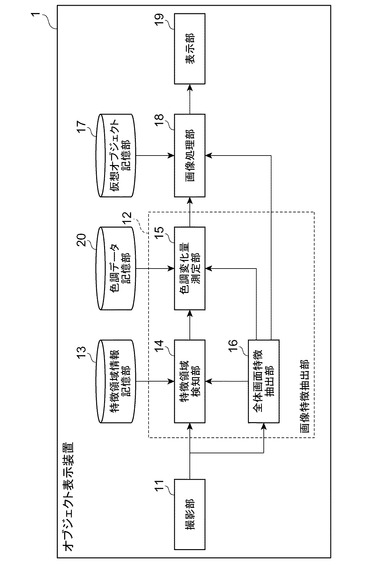
図1に示すように、オブジェクト表示装置1は、機能的には、撮影部11(撮影手段)、画像特徴抽出部12(画像特徴抽出手段)、特徴領域情報記憶部13(特徴領域情報記憶手段)、仮想オブジェクト記憶部17(仮想オブジェクト記憶手段)、画像処理部18(画像処理手段)、表示部19(表示手段)及び色調データ記憶部20を備える。また、画像特徴抽出部12は、特徴領域検知部14、色調変化量測定部15及び全体画面特徴抽出部16を含む。
【0026】
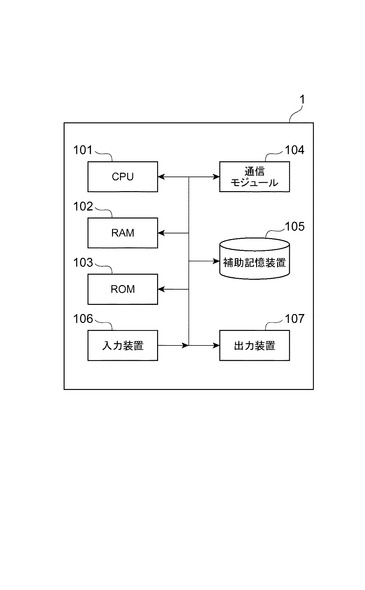
図2は、オブジェクト表示装置1のハードウエア構成図である。オブジェクト表示装置1は、物理的には、図2に示すように、CPU101、主記憶装置であるRAM102及びROM103、データ送受信デバイスである通信モジュール104、ハードディスク、フラッシュメモリ等の補助記憶装置105、入力デバイスであるキーボード等の入力装置106、ディスプレイ等の出力装置107などを含むコンピュータシステムとして構成されている。図1に示した各機能は、図2に示すCPU101、RAM102等のハードウエア上に所定のコンピュータソフトウェアを読み込ませることにより、CPU101の制御のもとで通信モジュール104、入力装置106、出力装置107を動作させるとともに、RAM102や補助記憶装置105におけるデータの読み出し及び書き込みを行うことで実現される。再び、図1を参照し、オブジェクト表示装置1の各機能部について詳細に説明する。
【0027】
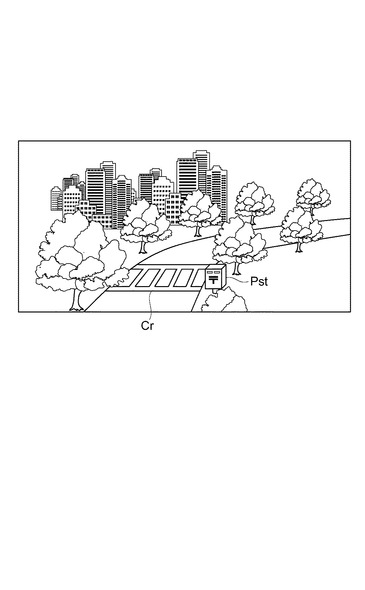
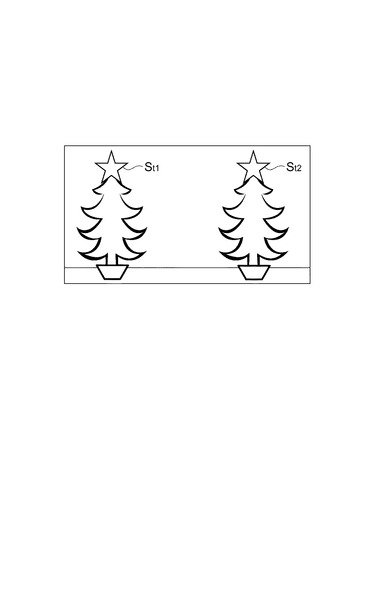
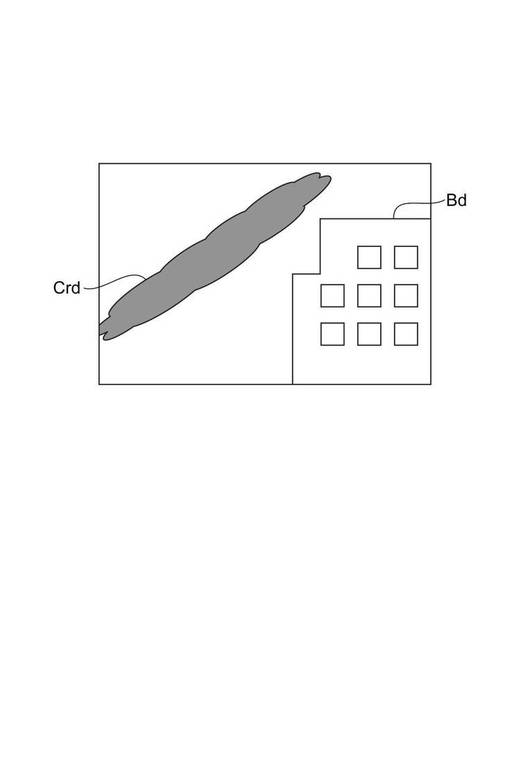
撮影部11は、現実空間の画像を取得する部分であって、例えばカメラにより構成される。図3〜5は、撮影部11により取得される現実空間の画像の例を示す図である。図3に示される現実空間の画像は、後に画像特徴抽出部12により抽出される特徴物として、横断歩道Cr及びポストPstの画像を含む。図4に示される現実空間の画像は、後に画像特徴抽出部12により抽出される特徴物として、星型のオブジェクトSt1,St2の画像を含む。図5に示される現実空間の画像は、後に画像特徴抽出部12により画像全体の色調を構成する要素として抽出される雲Crd及び建物Bdの画像を含む。撮影部11は、取得した現実空間の画像を画像特徴抽出部12に送出する。
【0028】
画像特徴抽出部12は、撮影部11により取得された現実空間の画像から検出された複数の所定の特徴領域又は現実空間の画像全体の、画像に関する所定の特徴を抽出する部分である。所定の特徴領域は、現実空間の画像の特徴を抽出するために参照される領域である。画像特徴抽出部12は、画像に関する特徴を抽出するための機能部として、特徴領域検知部14、色調変化量測定部15及び全体画面特徴抽出部16を含む。また、画像に関する特徴を抽出のために、特徴領域情報記憶部13が用いられる。
【0029】
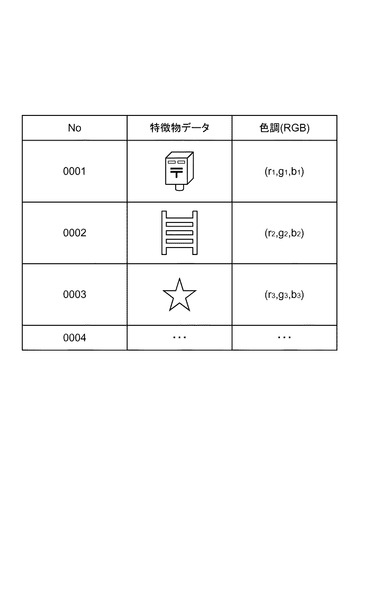
特徴領域情報記憶部13は、少なくとも特徴領域の色調に関する特徴領域情報を当該特徴領域に対応付けて記憶している部分である。また、特徴領域情報記憶部13は、現実空間の画像から特徴領域を検出(マッチング)するための当該特徴領域の形状を表す2Dまたは3Dデータを含む。本実施形態では、特徴領域情報記憶部13は、特徴領域を表すデータとして特徴物データを含む。図6は、特徴領域情報記憶部13の構成及び記憶されているデータの例を示す図である。
【0030】
図6に示すように、特徴領域情報記憶部13は、特徴領域を一意に識別する「No」に対応付けて特徴物データ及び色調のデータを記憶している。特徴物データは、上述したように、当該特徴物の形状を表す2Dまたは3Dデータであって、現実空間の画像からの特徴領域検知部14による特徴物の検出(マッチング)に用いられる。色調のデータは、当該特徴物の主要部分の色を表すデータであって、例えばRGB形式で表される。図6を参照すると、特徴領域情報記憶部13は、No「0001」に対応付けて、特徴物データとしてポストを表す3Dデータ、及び当該ポストの主要部分である赤色部分の色調を示すデータ(r1,g1,b1)を記憶している。また、特徴領域情報記憶部13は、No「0002」に対応付けて、特徴物データとして横断歩道を表す2Dデータ、及び当該横断歩道の主要部分である白色部分の色調を示すデータ(r2,g2,b2)を記憶している。さらに、特徴領域情報記憶部13は、No「0003」に対応付けて、特徴物データとして星型オブジェクトを表す2Dデータ、及び当該星型オブジェクトの色調を示すデータ(r3,g3,b3)を記憶している。
【0031】
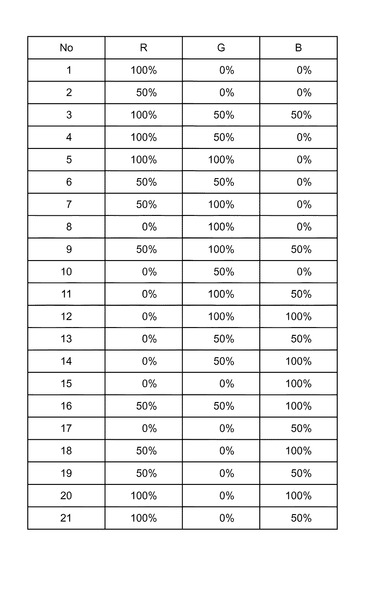
色調データ記憶部20は、色調の変化量の測定に用いられる色調データを記憶している部分であって、例えば、図7に示す色調テーブルを記憶している。図7に示すように、色調テーブルは、レコードを一意に識別する番号「No」に対応付けて、R値、G値及びB値それぞれの各階調の最大値に対する割合により色調を定義している。色調変化量測定部15は、色調データ記憶部20に記憶されているデータをもとに、色調の変化量を測定する。色調変化量測定部15による詳細な処理は後述する。
【0032】
仮想オブジェクト記憶部17は、仮想オブジェクトに関する仮想オブジェクト情報を予め又は一時的に記憶している部分である。オブジェクト表示装置1が、現実空間の画像から検出したマーカに対応付けてオブジェクトを表示する装置である場合には、仮想オブジェクト情報は、例えば、マーカに対応付けられたオブジェクトデータを含む。また、オブジェクト表示装置1が、現実空間における位置に対応付けられたオブジェクトを表示する装置である場合には、仮想オブジェクト情報は、例えば、位置情報に対応付けられたオブジェクトデータを含む。
【0033】
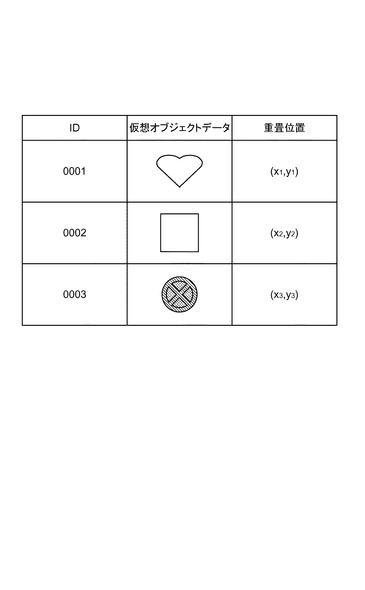
図8は、仮想オブジェクト記憶部17に記憶されている仮想オブジェクト情報の例を示す図である。図8に示すように、仮想オブジェクト記憶部17は、仮想オブジェクトを識別するIDに対応付けて仮想オブジェクトデータ及び重畳位置を記憶している。仮想オブジェクトデータは、仮想オブジェクトの形状及び色を表すデータである。重畳位置は、当該仮想オブジェクトが重畳表示される位置を示すデータであって、現実空間における絶対的な位置又はマーカ(特徴物)に対する相対的な位置を表す。
【0034】
仮想オブジェクト情報は、仮想オブジェクト記憶部17に予め記憶されていることとしてもよいし、図示しないサーバから所定の通信手段を介して取得されることとしてもよい。仮想オブジェクト情報がサーバから取得される場合には、オブジェクト表示装置1の所在位置を示す位置情報に基づき、仮想オブジェクト情報は、サーバから提供されることとしてもよい。オブジェクトデータは、例えば、オブジェクトの画像データ、又は当該オブジェクトを表すための3Dオブジェクトのデータである。現実空間の画像中においてオブジェクトが重畳表示される位置は、例えば、仮想オブジェクト情報においてオブジェクトデータに対応付けられた位置情報、又は、現実空間の画像中におけるマーカとの相対位置により定義される。
【0035】
画像処理部18は、仮想オブジェクト記憶部17から仮想オブジェクトを取得し、取得した仮想オブジェクトを、撮影部11により取得された現実空間の画像に重畳して、重畳画像を生成する部分である。重畳画像における仮想オブジェクトの重畳位置は、例えば、当該仮想オブジェクトに対応付けられている位置情報、又は現実空間の画像中におけるマーカとの相対位置に基づき決定される。画像処理部18は、生成した重畳画像を表示部19に送出する。
【0036】
また、画像処理部18は、画像特徴抽出部12により抽出された、現実空間の画像に関する所定の特徴に基づき、オブジェクトの画像を補正処理する。具体的な処理は、後に詳細を説明する。
【0037】
表示部19は、画像処理部18により生成及び送出された重畳画像を表示する部分であって、例えばディスプレイといった装置により構成される。重畳画像は、画像処理部18により補正処理されたオブジェクトの画像が、現実空間の画像に重畳された画像である。以下、画像特徴抽出部12および画像処理部18の詳細な機能について説明する。
【0038】
特徴領域検知部14は、撮影部11により取得された現実空間の画像から所定の特徴領域を検出する部分である。具体的には、特徴領域検知部14は、特徴領域情報記憶部13に記憶されている特徴物データに基づき現実空間の画像を探索して、現実空間の画像から特徴物を抽出する。
【0039】
図3に示した現実空間の画像を例に説明すると、特徴領域検知部14は、図6に示した特徴領域情報記憶部13に記憶された特徴物データに基づき現実空間の画像を探索する。そして、特徴領域検知部14は、No「0001」及び「0002」に示される特徴物に該当するポストPst及び横断歩道Crを抽出する。また、特徴領域検知部14は、図4に示した現実空間の画像を探索した場合には、No「0003に示される特徴物に該当する星型オブジェクトを抽出する。現実空間の画像における特徴物が表された領域は、特徴領域を構成する。特徴領域検知部14は、特徴物が抽出された場合に、現実空間の画像における特徴物の位置を表す情報(例えば、現実空間の画像における座標等)を取得し、色調変化量測定部15へ送出する。特徴領域検知部14は、特徴物を抽出できない場合は、その旨を全体画面特徴抽出部16へ通知することとしてもよい。全体画面特徴抽出部16の機能については、後述する。
【0040】
色調変化量測定部15は、特徴領域検知部14において抽出された特徴物に関して、特徴領域情報記憶部13に記憶された当該特徴物に対する色調の変化量を抽出する部分である。具体的には、例えば特徴物の色調がRGB形式で表されている場合には、色調変化量測定部15は、特徴領域情報記憶部13に記憶された特徴物のR値、G値及びB値と、特徴領域検知部14により抽出された特徴物のR値、G値及びB値との差異(特徴物の色調の変化量)をそれぞれ算出する。
【0041】
色調変化量測定部15は、特徴領域情報記憶部13に記憶された特徴物の色調(RGB)に対する特徴領域検知部14により抽出された特徴物の色調(RGB)の変化量に最も近い値を有するレコードを色調テーブルから抽出し、抽出したレコードを当該特徴物の色調の変化量とする。
【0042】
色調変化量測定部15は、特徴領域検知部14から取得した現実空間の画像における特徴物の位置を表す情報と共に、特徴物の色調の変化量の情報を画像処理部18に送出する。
【0043】
また、画像処理部18は、画像特徴抽出部12により抽出された、現実空間の画像に関する所定の特徴に基づき、オブジェクトの画像を補正処理する。具体的には、画像処理部18は、特徴領域検知部14及び色調変化量測定部15により抽出された、複数の特徴物の色調の変化量に基づき、仮想オブジェクト記憶部から取得したオブジェクトの画像を補正処理する。画像処理部は、色調変化量測定部から受信した特徴物の位置を表す情報とオブジェクトの表示位置を比較して、所定の距離以内であるか否かを判定する。また、画像処理部は、色調変化量測定部から受信した各特徴物の色調の変化量を比較して、変化量の差が所定量より小さいか否かを判定する。図9〜12を参照して、複数の特徴物の色調の変化量に基づく、オブジェクトの補正処理の例を説明する。
【0044】
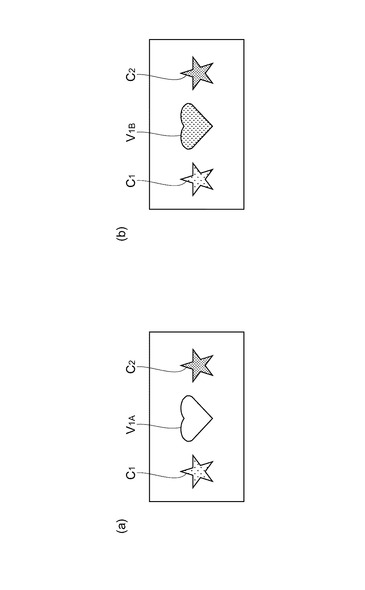
図9は、複数の特徴物C1,C2の色調の変化量の差が所定量より小さい場合におけるオブジェクトV1Aの補正処理の例を示す図である。複数の特徴物の色調の変化量の差が所定量より小さく、当該複数の特徴物から所定距離以内に補正処理対象のオブジェクトが位置する場合に、画像処理部18は、当該複数の特徴物の色調の変化量の平均変化量に基づく色調の補正を当該オブジェクトに対して実施する。
【0045】
色調の補正は、例えば、RGB形式で示された色調の平均変化量に基づきRGB各値の変換パラメータを生成し、オブジェクトを表す各画素のRGB値に当該変換パラメータによる所定の演算処理を施すことにより実現される。この補正処理には、各種の周知の色調補正処理及びフィルタ処理等の手法を適用可能であって、以下の図7,8を参照して説明する例においても同様である。
【0046】
図9(a)に示す例では、例えば、特徴物C1の色調の変化量が、図4に示す色調テーブルにおけるNo1に該当し、特徴物C2の色調の変化量が、色調テーブルにおけるNo2に該当するものとする。この場合には、特徴物C1の色調の変化量と特徴物C2の色調の変化量の差分が所定量より小さいので、画像処理部18は、特徴物C1の色調の変化量及び特徴物C2の色調の変化量の平均変化量に基づき変換パラメータを生成する。そして、図9(b)に示すように、画像処理部18は、生成した変換パラメータを用いて、オブジェクトV1Aに対する色調の補正処理を実施し、色調補正されたオブジェクトV1Bの画像を生成する。
【0047】
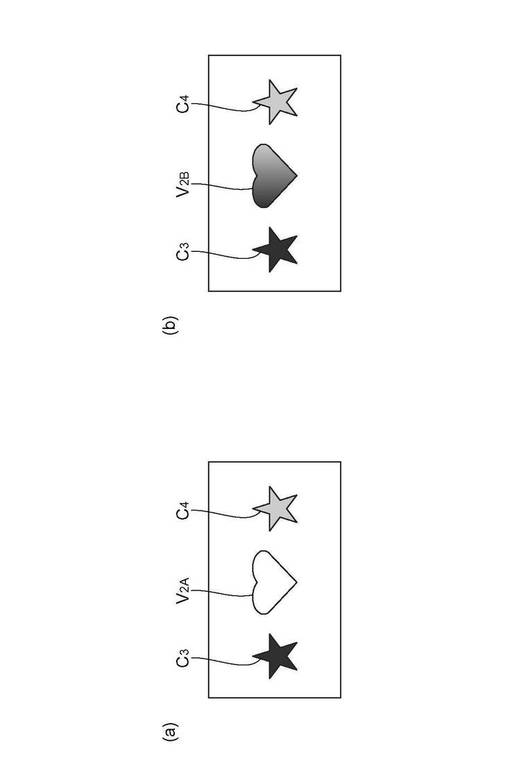
図10は、複数の特徴物C3,C4の色調の変化量における各色(RGB)の成分が類似しており、その濃淡に差異がある場合におけるオブジェクトV2Aの補正処理の例を示す図である。複数の特徴物の色調の変化量の成分の差が類似且つ所定量より小さく、当該複数の特徴物から所定距離以内に補正処理対象のオブジェクトが位置する場合に、画像処理部18は、当該複数の特徴物の色調の変化量と、当該複数の特徴物に対するオブジェクトの相対位置に基づき、グラデーション処理を当該オブジェクトに対して実施する。複数の色調の成分が類似している場合は、当該複数の色調が同系色に属し、その濃度に差異がある場合である。画像処理部18は、R、G、Bの各値に着目して、例えば、R値が0%のものを同系色と扱うこととしてもよいが、これに限定されない。
【0048】
図10(a)に示す例では、例えば、特徴物C3の色調の変化量が、図4に示す色調テーブルにおけるNo1に該当し、特徴物C4の色調の変化量が、色調テーブルにおけるNo4に該当するものとする。この場合には、特徴物C3の色調の変化量及び特徴物C4の色調の変化量における各色の成分が類似しており、両特徴物の色調の変化量が同系色に属するので、画像処理部18は、オブジェクトV2Aにグラデーション処理を実施し、図10(b)に示すような色調補正されたオブジェクトV2Bを生成する。
【0049】
具体的には、画像処理部18は、オブジェクトV2Aにおける特徴物C3に最も近い部分を、特徴物C3の色調の変化量に基づき生成された第1の変換パラメータにより色調補正する。一方、画像処理部18は、オブジェクトV2Aにおける特徴物C4に最も近い部分を、特徴物C4の色調の変化量に基づき生成された第2の変換パラメータにより色調補正する。そして、画像処理部18は、オブジェクトV2Aにおける特徴物C3に最も近い部分から特徴物C4に最も近い部分に至る領域に対して、特徴物C3及び特徴物C4からの距離に応じて第1の変換パラメータ値から第2の変換パラメータ値に変換パラメータの値を徐々に変化させながら、色調補正処理を実施する。
【0050】
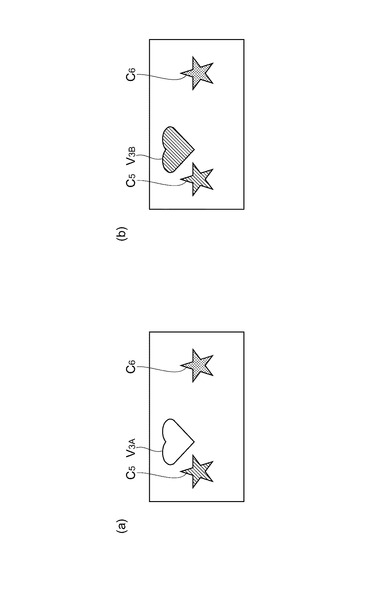
図11は、複数の特徴物C5,C6の色調の変化量の差が所定量より大きい場合におけるオブジェクトV3Aの補正処理の例を示す図である。複数の特徴物C5,C6の色調の変化量が顕著に異なる場合には、例えば、色調が異なる複数の光源が現実空間の画像中に存在すると想定される。複数の特徴物の色調の変化量の差が所定量より大きい場合に、画像処理部18は、色調補正対象のオブジェクトとの距離がより近い特徴物の色調の変化量に基づく色調の補正を当該オブジェクトに対して実施する。
【0051】
図11(a)に示す例では、例えば、特徴物C5の色調の変化量が、図4に示す色調テーブルにおけるNo1に該当し、特徴物C6の色調の変化量が、色調テーブルにおけるNo15に該当するものとする。この場合には、特徴物C5の色調の変化量と特徴物C6の色調の変化量の差分が所定量より大きく、且つオブジェクトV3Aの位置が特徴物C5の位置近傍に偏っており所定距離以下であるので、画像処理部18は、特徴物C5の色調の変化量に基づき変換パラメータを生成する。そして、図11(b)に示すように、画像処理部18は、生成した変換パラメータを用いて、オブジェクトV3Aに対する色調の補正処理を実施し、色調補正されたオブジェクトV3Bの画像を生成する。
【0052】
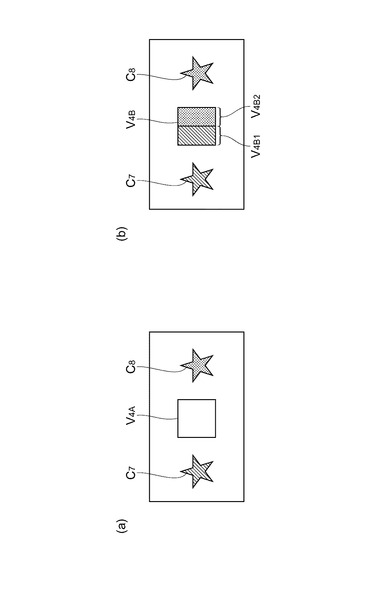
図12は、複数の特徴物C7,C8の色調の変化量の差が所定量より大きく、且つ、オブジェクトV4Aと特徴物C7,C8のそれぞれとの距離が同程度である場合におけるオブジェクトV4Aの補正処理の例を示す図である。図12(a)に示す例は、図11に示した例と同様に、例えば、色調が異なる複数の光源が現実空間の画像中に存在すると想定される。この場合には、図12(b)に示すように、画像処理部18は、オブジェクトV4Aを特徴物C7の位置により近い第1の領域V4B1及び特徴物C8の位置により近い第2の領域V4B2に分割し、第1の領域V4B1を特徴物C7の色調の変化量に基づき生成した変換パラメータにより色調補正し、第2の領域V4B2を特徴物C8の色調の変化量に基づき生成した変換パラメータにより色調補正することとしてもよい。
【0053】
全体画面特徴抽出部16は、現実空間の画像全体の色調に関する特徴(補正色情報)を、補正色として抽出する部分である。具体的には、全体画面特徴抽出部16は、例えば、現実空間の画像全体の色調に関する特徴として、例えば、画像全体における支配的な色成分、画像全体の色調の平均の色調、ノイズ分布を抽出する。全体画面特徴抽出部16は、抽出した補正色を画像処理部18へ送出する。
【0054】
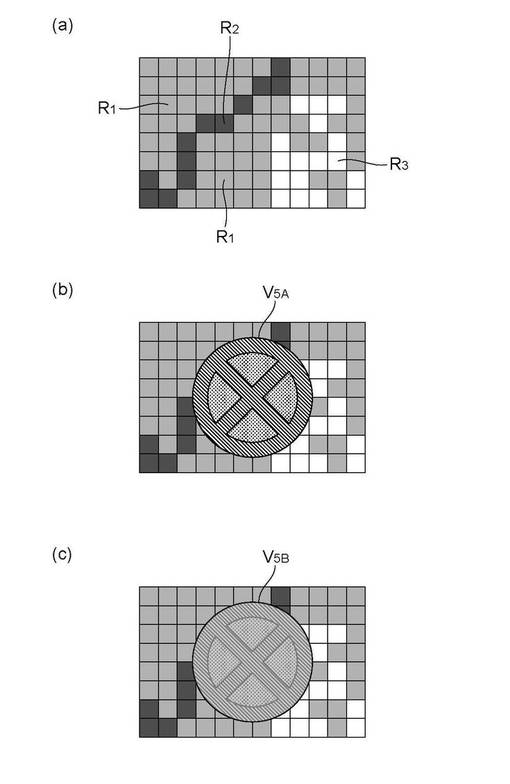
図13(a)を参照して、全体画面特徴抽出部16による支配的な色成分の抽出処理を説明する。図13(a)は、現実空間の画像の色調の分布を模式的に示す図である。図13(a)に示す画像は、例えば、図5に示した現実空間の画像を所定の大きさの単位領域に分割し、各領域に含まれる画素の色調の平均値を当該領域全体の色調とすることにより得られる。図13(a)に示す画像では、領域R1は、図5に示した画像の背景に由来する色調を有し、領域R2は、雲Crdに由来する色調を有し、領域R3は、建物Bdに由来する色調を有している。全体画面特徴抽出部16は、図13(a)に示す現実空間の画像を解析して、領域R1の色調を支配的色成分として抽出し、領域R1の色調をオブジェクトの補正処理のための補正色として抽出する。画像からの支配的な色成分の抽出処理は、画像全体を単位領域に区切って色調の解析を行なうなど、周知の解析手法により実施可能である。
【0055】
画像全体の色調の平均の色調の抽出処理としては、全体画面特徴抽出部16は、領域R1、領域R2、領域R3の各々のピクセル数及び当該領域の色調を示すRGB値に基づき現実空間の画像全体の色調の平均の色調を算出し、算出した平均に色調をオブジェクトの補正処理のための補正色として抽出する。
【0056】
また、全体画面特徴抽出部16は、現実空間の画像におけるノイズの分布に関する特徴を抽出する。具体的には、全体画面特徴抽出部16は、現実空間の画像におけるノイズを検出し、検出したノイズの密度といった情報を含む、ノイズの分布情報を抽出する。
【0057】
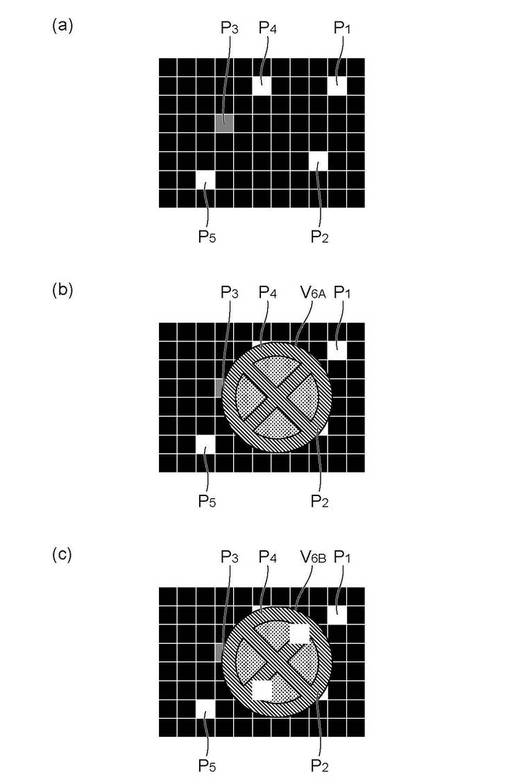
図14(a)を参照して、全体画面特徴抽出部16による現実空間の画像全体のノイズの分布に関する特徴の抽出処理の例を説明する。図14(a)は、現実空間の画像のノイズの分布を模式的に示す図である。
【0058】
全体画面特徴抽出部16は、現実空間の画像から一のピクセルを選択し、当該一のピクセルの周囲のピクセルの色を表す値の平均値に対して、当該一のピクセルの色を表す値が所定以上相違する場合に、当該一のピクセルをノイズを判断する。図14(a)に示す例では、全体画面特徴抽出部16は、ピクセルP1,P2,P4及びP5をノイズと判断する。一方、ピクセルP3の色は、その周囲の色と相違しているが、その相違が所定以上ではないので、全体画面特徴抽出部16は、ピクセルP3をノイズと判断しない。全体画面特徴抽出部16は、例示したような処理方法により現実空間の画像からノイズを検出し、そのノイズの密度を、ノイズの分布に関する情報として抽出する。そして、全体画面特徴抽出部16は、抽出されたノイズの分布に関する情報を画像処理部18に送出する。
【0059】
全体画面特徴抽出部16は、抽出されたオブジェクトの補正処理のための補正色に関する情報(補正色情報)を画像処理部18に送出する。
【0060】
画像処理部18は、全体画面特徴抽出部16により抽出された現実空間の画像全体の色調に関する特徴に基づきオブジェクトの画像を補正処理する。具体的には、画像処理部18は、全体画面特徴抽出部16から、現実空間の画像全体の色調から抽出された補正色に関する補正色情報を取得する。画像処理部18は、例えばRGB形式で表された補正色情報に基づき、RGB各値の変換パラメータを生成する。そして、画像処理部18は、オブジェクトを表す各画素のRGB値に当該変換パラメータによる所定の演算処理を施すことにより、オブジェクトの画像の補正処理を実施する。変換パラメータの生成及び変換パラメータによる演算処理は、各種の周知の色調補正処理及びフィルタ処理等における手法を適用可能である。
【0061】
図13(b)は、画像処理部18による補正処理が実施されていない場合の重畳画像の例を示す図である。図13(b)に示すように、オブジェクトV5Aは、現実空間の画像全体の色調が反映されていないので、違和感のある重畳画像となる。一方、図13(c)は、画像処理部18による現実空間の画像全体の支配的な色成分による補正処理が実施された場合の重畳画像の例を示す図である。図13(c)に示すように、オブジェクトV5Bは、現実空間の画像全体の支配的な色成分による補正処理(乗算処理)が施されているので、重畳画像における違和感が軽減されている。
【0062】
さらに、画像処理部18は、全体画面特徴抽出部16により抽出された、現実空間の画像におけるノイズの分布に関する特徴に基づきオブジェクトの画像を補正処理することができる。具体的には、画像処理部18は、全体画面特徴抽出部16から、ノイズの密度といった情報を含むノイズの分布情報を取得する。そして、画像処理部18は、取得したノイズの分布情報に従って、補正対象のオブジェクトに対して、ノイズを付加する画像処理を実施する。ノイズは、例えば、所定のサイズを有する白色の点をオブジェクトに重畳することにより表される。この画像処理により、オブジェクトは、現実空間の画像全体と同様のノイズを有することとなる。
【0063】
図14(b)は、画像処理部18による補正処理が実施されていない場合の重畳画像の例を示す図である。図14(b)に示すように、オブジェクトV5Aは、現実空間の画像全体に発生したノイズの状態が反映されていないので、違和感のある重畳画像となる。一方、図14(c)は、画像処理部18によるノイズの分布情報による補正処理が実施された場合の重畳画像の例を示す図である。図13(c)に示すように、オブジェクトV5Bは、現実空間の画像全体に発生したノイズと同様のノイズが付加される補正処理が施されているので、重畳画像における違和感が軽減されている。
【0064】
なお、ノイズの分布情報による補正は、前述の支配的な色成分による色調補正と併せて実施してもよいし、平均の色調による色調補正と併せて実施してもよい。
【0065】
上述のように、画像処理部18は、色調変化量測定部15や全体画面特徴抽出部16から取得した補正色情報に基づいて、オブジェクトの色調を補正し、重畳画像を表示部19へ送出する。このようにして、表示部19に重畳画像が表示される。
【0066】
続いて、オブジェクト表示装置1におけるオブジェクト表示方法の処理内容を説明する。図15〜17は、オブジェクト表示方法の処理内容を示すフローチャートである。
【0067】
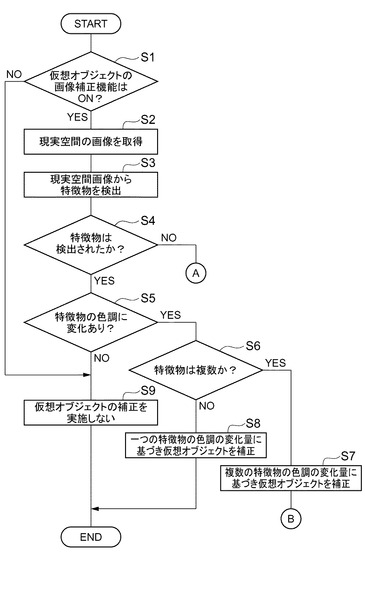
まず、図15のフローチャートを参照すると、オブジェクト表示装置1は、仮想オブジェクトの画像補正機能がONに設定されているか否かを判定する(S1)。画像補正機能がONに設定されていると判定された場合には、処理手順はステップS2に進められる。一方、画像補正機能がONに設定されていると判定されなかった場合には、処理手順はステップS9に進められ、仮想オブジェクトの補正は実施されない。
【0068】
ステップS2において、撮影部11は、現実空間の画像を取得する(S2)。続いて、画像特徴抽出部12の特徴領域検知部14は、現実空間の画像から特徴物の検出を試み(S3)、特徴物が検出されたか否かを判定する(S4)。特徴物が検出されたと判定された場合には、処理手順はステップS5に進められる。一方、特徴物が検出されたと判定されなかった場合には、処理手順は図10に示されるフローチャートのステップS10に進められる。
【0069】
ステップS5において、画像特徴抽出部12の色調変化量測定部15は、特徴領域情報記憶部13を参照して特徴領域検知部14において抽出された特徴物の色調の変化量の抽出を試み、特徴物の色調に変化があるか否かを判定する(S5)。特徴物の色調に変化があると判定した場合には、処理手順はステップS6に進められる。一方、特徴物の色調に変化があると判定しなかった場合には、処理手順はステップS9に進められ、仮想オブジェクトの補正は実施されない。
【0070】
ステップS6において、画像特徴抽出部12は、色調の変化が検出された特徴物が複数であるか否かを判定する(S6)。特徴物が複数であると判定された場合には、処理手順はステップS7に進められる。一方、特徴物が複数であると判定されなかった場合には、処理手順はステップS8に進められる。
【0071】
ステップS7において、画像処理部18は、複数の特徴物の色調の変化量に基づき、仮想オブジェクト記憶部17から取得したオブジェクトの画像を補正処理する(S7)。一方、ステップS8において、画像処理部18は、一の特徴物の色調の変化量に基づき、仮想オブジェクト記憶部17から取得したオブジェクトの画像を補正処理する(S8)。また、ステップS9において、画像処理部18は、オブジェクトに対する補正処理を実施しない。
【0072】
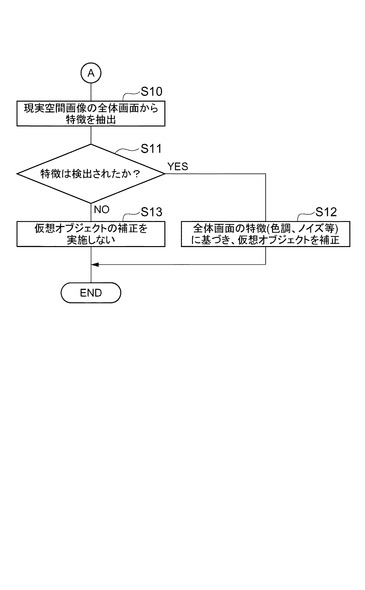
続いて、図16を参照して、ステップS4において特徴物が検出されたと判定されなかった場合の処理を説明する。ステップS10において、画像特徴抽出部12の全体画面特徴抽出部16は、現実空間の画像全体から、画像に関する特徴の抽出を試みる(S10)。ここで抽出される特徴は、現実空間の画像全体の色調に関する特徴、及びノイズの分布に関する特徴を含む。現実空間の画像全体から特徴が抽出された場合には、処理手順はステップS12に進められる。一方、現実空間の画像全体から特徴が抽出されなかった場合には、処理手順はステップS13に進められ、仮想オブジェクトの補正は実施されない。
【0073】
ステップS12において、画像処理部18は、全体画面特徴抽出部16により抽出された現実空間の画像全体の特徴に基づきオブジェクトの画像を補正処理する(S12)。ステップS12における補正処理は、画像全体における支配的な色成分や画像全体の色調の平均の色調といった色調に基づく補正及び画像全体におけるノイズ分布に基づく補正を含む。また、色調に基づく補正及びノイズ分布に基づく補正の両方が実施されることとしてもよい。
【0074】
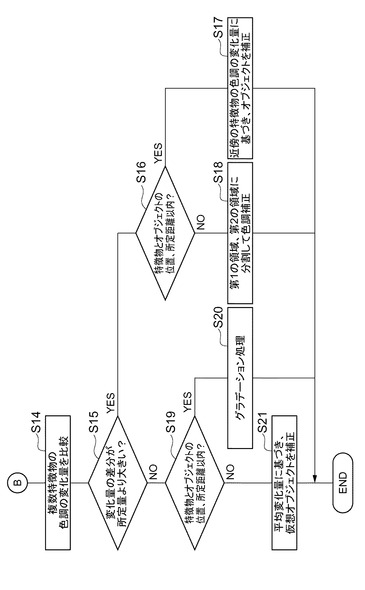
次に、図17を参照して、図15におけるステップS7の処理を詳細に説明する。まず、画像処理部18は、複数の特徴物の色調の変化量を比較し(S14)、変化量の差分が所定量より大きいか否かを判定する(S15)。変化量の差分が所定量より大きいと判定された場合には、処理手順はステップS16に進められる。一方、変化量の差分が所定量より大きいと判定されなかった場合には、処理手順はステップS19に進められる。
【0075】
ステップS16において、画像処理部18は、特徴物とオブジェクトの位置が所定距離以内か否かを判定する(S16)。特徴物とオブジェクトの位置が所定距離以内であると判定された場合には,処理手順はステップS17に進められる。一方、特徴物とオブジェクトの位置が所定距離以内であると判定されなかった場合には,処理手順はステップS18に進められる。
【0076】
ステップS17において、画像処理部18は、色調補正対象のオブジェクトのより近傍に位置する特徴物の色調の変化量に基づく色調の補正を当該オブジェクトに対して実施する(S17)。一方、ステップS18において、画像処理部18は、オブジェクトを特徴物のそれぞれにより近い第1の領域及び第2の領域に分割し、領域ごとに各々の領域の近傍に位置する特徴物の色調の変化量基づき色調補正する(S18)。
【0077】
また、ステップS19において、画像処理部18は、特徴物とオブジェクトの位置が所定距離以内か否かを判定する(S19)。特徴物とオブジェクトの位置が所定距離以内であると判定された場合には,処理手順はステップS20に進められる。一方、特徴物とオブジェクトの位置が所定距離以内であると判定されなかった場合には,処理手順はステップS21に進められる。
【0078】
ステップS20において、画像処理部18は、各特徴物の色調の変化量に基づきオブジェクトにグラデーション処理を実施する(S20)。一方、ステップS21において、画像処理部18は、複数の特徴物の色調の変化量の平均変化量に基づく色調の補正をオブジェクトに対して実施する(S21)。
【0079】
そして、ステップS7〜S9,S12〜S13,S17〜S18,S20〜S21の処理手順を経て、画像処理部18は、現実空間の画像にオブジェクトを重畳した重畳画像を生成し、表示部19は、画像処理部18により生成された重畳画像を表示する。
【0080】
本実施形態では、画像特徴抽出部12は、複数の特徴物(特徴領域)の色調の変化量を取得するための特徴領域検知部14及び色調変化量測定部15、並びに現実空間の画像全体の特徴を抽出するための全体画面特徴抽出部16を有することとしているが、特徴領域検知部14及び色調変化量測定部15と、全体画面特徴抽出部16とのうちのいずれか一方を備えることとしてもよい。即ち、画像処理部18は、複数の特徴物の色調の変化量及び現実空間の画像全体の特徴のいずれか一方に基づき、オブジェクトの画像の補正処理を実施することとしてもよい。
【0081】
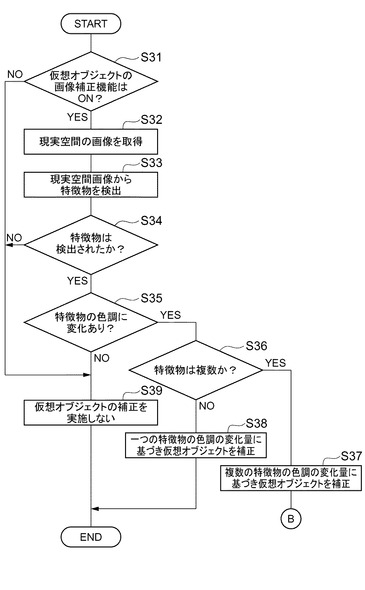
図18は、複数の特徴物の色調の変化量に基づき、オブジェクトの画像の補正処理を実施する処理を示すフローチャートである。ステップS31〜S33の処理は、図15のフローチャートにおけるS1〜S3の処理と同様である。続くステップS34において、特徴領域検知部14は、特徴物が検出されたか否かを判定する(S34)。特徴物が検出されたと判定された場合には、処理手順はステップS35に進められ、画像処理部18は、ステップS5〜9と同様の処理内容であるステップS35〜S39において、複数の特徴物の色調の変化量に基づくオブジェクトの補正処理を実施する。
【0082】
一方、ステップS34において特徴物が検出されたと判定されなかった場合には、処理手順はステップS39に進められ、仮想オブジェクトの補正処理は実施されない。図18のフローチャートにより説明した処理では、オブジェクト表示装置1は、特徴物の色調に関する情報を有しており、このような特徴物の色調の変化に基づきオブジェクトの色調を補正するので、容易に補正処理を実施できる。
【0083】
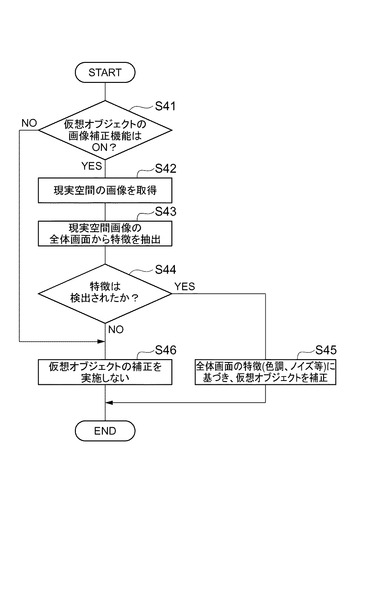
一方、図19は、現実空間の画像全体の特徴に基づき、オブジェクトの画像の補正処理を実施する処理を示すフローチャートである。まず、オブジェクト表示装置1は、仮想オブジェクトの画像補正機能がONに設定されているか否かを判定する(S41)。画像補正機能がONに設定されていると判定された場合には、処理手順はステップS42に進められる。一方、画像補正機能がONに設定されていると判定されなかった場合には、処理手順はステップS46に進められ、仮想オブジェクトの補正は実施されない。
【0084】
ステップS42において、撮影部11は、現実空間の画像を取得する(S42)。続いて、画像特徴抽出部12の全体画面特徴抽出部16は、現実空間の画像全体から、画像に関する特徴の抽出を試みる(S43)。ここで抽出される特徴は、現実空間の画像全体の色調に関する特徴、及びノイズの分布に関する特徴を含む。現実空間の画像全体から特徴が抽出された場合には、処理手順はステップS45に進められる(S44)。
【0085】
一方、現実空間の画像全体から特徴が抽出されなかった場合には(S44)、処理手順はステップS46に進められ、仮想オブジェクトの補正は実施されない。ステップS45において、画像処理部18は、全体画面特徴抽出部16により抽出された現実空間の画像全体の特徴に基づきオブジェクトの画像を補正処理する(S45)。図19のフローチャートにより説明した処理では、オブジェクト表示装置1は、現実空間の画像全体の色調等に基づきオブジェクトの補正処理を実施するので、重畳画像におけるオブジェクトの違和感が軽減される。
【0086】
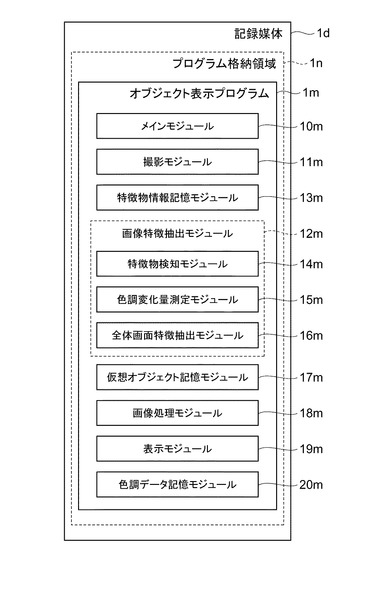
次に、コンピュータを、本実施形態のオブジェクト表示装置1として機能させるためのオブジェクト表示プログラムについて説明する。図20は、図1に示したオブジェクト表示装置1に対応するオブジェクト表示プログラム1mの構成を示す図である。
【0087】
オブジェクト表示プログラム1mは、オブジェクト表示処理を統括的に制御するメインモジュール10m、撮影モジュール11m、画像特徴抽出モジュール12m、特徴領域情報記憶モジュール13m、仮想オブジェクト記憶モジュール17m、画像処理モジュール18m、表示モジュール19m及び色調データ記憶モジュール20mを備えて構成される。また、画像特徴抽出モジュール12mは、特徴領域検知モジュール14m、色調変化量測定モジュール15m及び全体画面特徴抽出モジュール16mを含む。そして、各モジュール10m〜20mにより、オブジェクト表示装置1における各機能部11〜20のための各機能が実現される。なお、オブジェクト表示プログラム1mは、通信回線等の伝送媒体を介して伝送される態様であってもよいし、図11に示されるように、記録媒体1dのプログラム格納領域1rに記憶される態様であってもよい。
【0088】
本実施形態のオブジェクト表示装置1、オブジェクト表示方法及びオブジェクト表示プログラム1mによれば、撮影部11により取得された現実空間の画像から、画像特徴抽出部12により、複数の特徴物又は現実空間の画像全体から画像に関する所定の特徴が抽出される。そして、画像に関する特徴に基づきオブジェクトの画像が補正処理されるので、オブジェクトの画像に対して現実空間の画像の特徴が適切に反映される。従って、現実空間の画像にオブジェクトを重畳表示させた重畳画像におけるオブジェクトの画像の違和感が軽減される。
【0089】
以上、本発明をその実施形態に基づいて詳細に説明した。しかし、本発明は上記実施形態に限定されるものではない。本発明は、その要旨を逸脱しない範囲で様々な変形が可能である。
【符号の説明】
【0090】
1…オブジェクト表示装置、1d…記録媒体、1m…オブジェクト表示プログラム、1r…プログラム格納領域、10m…メインモジュール、11…撮影部、11m…撮影モジュール、12…画像特徴抽出部、12m…画像特徴抽出モジュール、13…特徴領域情報記憶部、13m…特徴領域情報記憶モジュール、14…特徴領域検知部、14m…特徴領域検知モジュール、15…色調変化量測定部、15m…色調変化量測定モジュール、16…全体画面特徴抽出部、16m…全体画面特徴抽出モジュール、17…仮想オブジェクト記憶部、17m…仮想オブジェクト記憶モジュール、18…画像処理部、18m…画像処理モジュール、19…表示部、19m…表示モジュール、20…色調データ記憶部、20m…色調データ記憶モジュール。
【技術分野】
【0001】
本発明は、オブジェクト表示装置、オブジェクト表示方法及びオブジェクト表示プログラムに関する。
【背景技術】
【0002】
近年において、AR(Augmented Reality:拡張現実)技術を用いたサービスが開発・提供されている。例えば、移動端末の所在位置の周辺に配置されたオブジェクトを取得し、移動端末に備えられたカメラにより取得した現実空間の画像に種々の情報や画像を含むオブジェクトを重畳表示する技術が知られている。また、移動端末のカメラにより取得された現実空間の画像から所定のマーカを検出し、当該マーカに対応付けられたオブジェクトを現実空間の画像に重畳してディスプレイに表示する技術が知られている。一方、オブジェクトを現実空間の画像に重畳する際の、現実空間の映像におけるオブジェクトの色調を考慮するための技術として現実空間に配置されたマーカの色調に基づきオブジェクトの色調を補正する技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−170316号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
現実空間の画像にオブジェクトが重畳された重畳画像におけるオブジェクトの違和感を軽減するためには、現実空間の画像の特徴がオブジェクトの画像に反映されることが好ましい。しかしながら、特許文献1に記載された従来の技術では、現実空間に配置された一のマーカの色調に基づきオブジェクトの色調の補正が行われるので、画像中における限られた一の領域に現実空間の画像の特徴を代表させることとなる。マーカの色調が現実空間の画像の特徴を代表しているとは限らないので、上記した従来技術では、オブジェクトの画像に対して適切な補正が行われず、重畳画像において違和感が生じる場合があった。
【0005】
そこで、本発明は、上記問題点に鑑みてなされたものであり、AR技術において、現実空間の画像にオブジェクトを重畳表示させた重畳画像における、オブジェクトの画像の違和感を軽減することが可能なオブジェクト表示装置、オブジェクト表示方法及びオブジェクト表示プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のオブジェクト表示装置は、現実空間の画像にオブジェクトを重畳表示するオブジェクト表示装置であって、現実空間の画像を取得する撮影手段と、撮影手段により取得された現実空間の画像から検出された複数の所定の特徴領域又は現実空間の画像全体の、画像に関する所定の特徴を抽出する画像特徴抽出手段と、画像特徴抽出手段により抽出された所定の特徴に基づき、オブジェクトの画像を補正処理する画像処理手段と、画像処理手段により補正処理されたオブジェクトの画像を、現実空間の画像に重畳した重畳画像を表示する表示手段とを備える。
【0007】
また、上記課題を解決するために、本発明のオブジェクト表示方法は、現実空間の画像にオブジェクトを重畳表示するオブジェクト表示装置におけるオブジェクト表示方法であって、現実空間の画像を取得する撮影ステップと、撮影ステップにおいて取得された現実空間の画像から検出された複数の特徴領域又は現実空間の画像全体の、画像に関する所定の特徴を抽出する画像特徴抽出ステップと、画像特徴抽出ステップにおいて抽出された所定の特徴に基づき、オブジェクトの画像を補正処理する画像処理ステップと、画像処理ステップにおいて補正処理されたオブジェクトの画像を、現実空間の画像に重畳した重畳画像を表示する表示ステップとを有する。
【0008】
また、上記課題を解決するために、本発明のオブジェクト表示プログラムは、コンピュータを、現実空間の画像にオブジェクトを重畳表示するオブジェクト表示装置として機能させるためのオブジェクト表示プログラムであって、コンピュータに、現実空間の画像を取得する撮影機能と、撮影機能により取得された現実空間の画像から検出された複数の特徴領域又は現実空間の画像全体の、画像に関する所定の特徴を抽出する画像特徴抽出機能と、画像特徴抽出機能により抽出された所定の特徴に基づき、オブジェクトの画像を補正処理する画像処理機能と、画像処理機能により補正処理されたオブジェクトの画像を、現実空間の画像に重畳した重畳画像を表示する表示機能とを実現させる。
【0009】
本発明のオブジェクト表示装置、オブジェクト表示方法及びオブジェクト表示プログラムによれば、現実空間の画像から検出された複数の特徴領域又は現実空間の画像全体から抽出された画像に関する所定の特徴に基づきオブジェクトの画像が補正処理されるので、オブジェクトの画像に対して現実空間の画像の特徴が適切に反映される。従って、現実空間の画像にオブジェクトを重畳表示させた重畳画像におけるオブジェクトの画像の違和感が軽減される。
【0010】
また、本発明のオブジェクト表示装置では、画像特徴抽出手段は、特徴領域が検出されなかった場合に、現実空間の画像全体から所定の特徴を抽出することとしてもよい。
【0011】
上記構成によれば、まず所定の特徴領域の検出が試みられ、オブジェクトの画像の補正に用いられる特徴が、検出された特徴領域の画像から抽出されるので、オブジェクトの画像の補正に用いられる特徴の抽出が容易である。また、特徴領域が検出されなかった場合であっても、現実空間の画像から抽出された所定の特徴がオブジェクトの画像の補正に用いられるので、オブジェクトの画像の適切な補正の実施が可能である。
【0012】
また、本発明のオブジェクト表示装置は、少なくとも特徴領域の色調に関する特徴領域情報を当該特徴領域に対応付けて記憶している特徴領域情報記憶手段を備え、画像特徴抽出手段は、特徴領域情報記憶手段に記憶された色調に対する、現実空間の画像における複数の特徴領域の色調の変化量を抽出し、画像処理手段は、画像特徴抽出手段により抽出された色調の変化量に基づきオブジェクトの画像を補正処理することとしてもよい。
【0013】
上記構成によれば、検出された特徴領域に関して予め記憶された色調に対する、現実空間の画像における当該特徴領域の色調の変化量に基づき、オブジェクトの画像の色調が補正される。これにより、オブジェクトの画像に対して、現実空間の画像の色調が適切に反映される。
【0014】
また、本発明のオブジェクト表示装置では、画像処理手段は、現実空間の画像における特徴領域の位置に対するオブジェクトの重畳位置に応じて、オブジェクトの画像を補正処理する。
【0015】
上記構成によれば、特徴領域の色調の変化量のオブジェクトの色調に対する反映の度合いが、特徴領域とオブジェクトとの位置関係に応じて考慮される。これにより、オブジェクトの色調がより適切に補正されるので、一層の違和感の軽減が実現される。
【0016】
また、本発明のオブジェクト表示装置では、画像特徴抽出手段は、現実空間の画像全体の色調に関する特徴を抽出し、画像処理手段は、画像特徴抽出手段により抽出された現実空間の画像全体の色調に関する特徴に基づき補正処理することとしてもよい。
【0017】
上記構成によれば、現実空間の画像全体の色調がオブジェクトの色調に反映されることとなるので、重畳画像におけるオブジェクトの違和感が軽減される。
【0018】
また、本発明のオブジェクト表示装置では、画像特徴抽出手段は、現実空間の画像におけるノイズの分布に関する特徴を抽出し、画像処理手段は、画像特徴抽出手段により抽出されたノイズの分布に関する特徴に基づき補正処理することとしてもよい。
【0019】
現実空間の画像にノイズがある場合において、ノイズがないオブジェクトの画像が重畳されると、重畳画像において違和感が生じる。上記構成によれば、現実空間の画像におけるノイズの分布に関する特徴が、オブジェクトの画像に反映されるので、重畳画像における違和感が軽減される。
【発明の効果】
【0020】
AR技術において、現実空間の画像にオブジェクトを重畳表示させた重畳画像における、オブジェクトの画像の違和感を軽減することが可能となる。
【図面の簡単な説明】
【0021】
【図1】オブジェクト表示装置の機能的構成を示すブロック図である。
【図2】オブジェクト表示装置のハードブロック図である。
【図3】撮影部により取得される現実空間の画像の例を示す図である。
【図4】撮影部により取得される現実空間の画像の例を示す図である。
【図5】撮影部により取得される現実空間の画像の例を示す図である。
【図6】特徴領域情報記憶部の構成及び記憶されているデータの例を示す図である。
【図7】色調変化量測定部における、特徴領域の色調の変化量を抽出するための色調テーブルの例を示す図である。
【図8】仮想オブジェクト記憶部の構成及び記憶されているデータの例を示す図である。
【図9】特徴領域の色調の変化量に基づくオブジェクトの色調の補正処理の例を示す図である。
【図10】特徴領域の色調の変化量に基づくオブジェクトの色調の補正処理の例を示す図である。
【図11】特徴領域の色調の変化量に基づくオブジェクトの色調の補正処理の例を示す図である。
【図12】特徴領域の色調の変化量に基づくオブジェクトの色調の補正処理の例を示す図である。
【図13】現実空間の画像全体の色調に基づく補正処理の例を示す図である。
【図14】現実空間の画像全体のノイズ分布に基づく補正処理の例を示す図である。
【図15】オブジェクト表示方法の処理内容を示すフローチャートである。
【図16】オブジェクト表示方法の処理内容を示すフローチャートである。
【図17】オブジェクト表示方法の処理内容を示すフローチャートである。
【図18】特徴領域の色調の変化量に基づく補正処理を示すフローチャートである。
【図19】現実空間の画像全体の特徴に基づく補正処理を示すフローチャートである。
【図20】オブジェクト表示プログラムの構成を示す図である。
【発明を実施するための形態】
【0022】
本発明に係るオブジェクト表示装置、オブジェクト表示方法及びオブジェクト表示プログラムの実施形態について図面を参照して説明する。なお、可能な場合には、同一の部分には同一の符号を付して、重複する説明を省略する。
【0023】
図1は、オブジェクト表示装置1の機能的構成を示すブロック図である。本実施形態のオブジェクト表示装置1は、現実空間の画像にオブジェクトを重畳表示する装置であって、例えば、移動体通信網を介した通信が可能な携帯端末である。
【0024】
移動端末等の装置を用いたAR技術によるサービスとしては、例えば、移動端末のカメラにより取得された現実空間の画像から所定のマーカを検出し、当該マーカに対応付けられたオブジェクトを現実空間の画像に重畳してディスプレイに表示するものがある。マーカは、現実空間中に予め人為的に設けられた物であってもよいし、現実空間中に存在する建物及び看板等の構造物並びにロゴマーク等であってもよい。また、同様のサービスとしては、移動端末が所在する位置情報に基づき移動端末の所在位置の周辺に配置されたオブジェクトを取得し、移動端末に備えられたカメラにより取得した現実空間の画像中の位置に対応付けてオブジェクトを重畳表示するものがある。本実施形態のオブジェクト表示装置1では、上記したAR技術によるサービスの両態様が想定される。
【0025】
図1に示すように、オブジェクト表示装置1は、機能的には、撮影部11(撮影手段)、画像特徴抽出部12(画像特徴抽出手段)、特徴領域情報記憶部13(特徴領域情報記憶手段)、仮想オブジェクト記憶部17(仮想オブジェクト記憶手段)、画像処理部18(画像処理手段)、表示部19(表示手段)及び色調データ記憶部20を備える。また、画像特徴抽出部12は、特徴領域検知部14、色調変化量測定部15及び全体画面特徴抽出部16を含む。
【0026】
図2は、オブジェクト表示装置1のハードウエア構成図である。オブジェクト表示装置1は、物理的には、図2に示すように、CPU101、主記憶装置であるRAM102及びROM103、データ送受信デバイスである通信モジュール104、ハードディスク、フラッシュメモリ等の補助記憶装置105、入力デバイスであるキーボード等の入力装置106、ディスプレイ等の出力装置107などを含むコンピュータシステムとして構成されている。図1に示した各機能は、図2に示すCPU101、RAM102等のハードウエア上に所定のコンピュータソフトウェアを読み込ませることにより、CPU101の制御のもとで通信モジュール104、入力装置106、出力装置107を動作させるとともに、RAM102や補助記憶装置105におけるデータの読み出し及び書き込みを行うことで実現される。再び、図1を参照し、オブジェクト表示装置1の各機能部について詳細に説明する。
【0027】
撮影部11は、現実空間の画像を取得する部分であって、例えばカメラにより構成される。図3〜5は、撮影部11により取得される現実空間の画像の例を示す図である。図3に示される現実空間の画像は、後に画像特徴抽出部12により抽出される特徴物として、横断歩道Cr及びポストPstの画像を含む。図4に示される現実空間の画像は、後に画像特徴抽出部12により抽出される特徴物として、星型のオブジェクトSt1,St2の画像を含む。図5に示される現実空間の画像は、後に画像特徴抽出部12により画像全体の色調を構成する要素として抽出される雲Crd及び建物Bdの画像を含む。撮影部11は、取得した現実空間の画像を画像特徴抽出部12に送出する。
【0028】
画像特徴抽出部12は、撮影部11により取得された現実空間の画像から検出された複数の所定の特徴領域又は現実空間の画像全体の、画像に関する所定の特徴を抽出する部分である。所定の特徴領域は、現実空間の画像の特徴を抽出するために参照される領域である。画像特徴抽出部12は、画像に関する特徴を抽出するための機能部として、特徴領域検知部14、色調変化量測定部15及び全体画面特徴抽出部16を含む。また、画像に関する特徴を抽出のために、特徴領域情報記憶部13が用いられる。
【0029】
特徴領域情報記憶部13は、少なくとも特徴領域の色調に関する特徴領域情報を当該特徴領域に対応付けて記憶している部分である。また、特徴領域情報記憶部13は、現実空間の画像から特徴領域を検出(マッチング)するための当該特徴領域の形状を表す2Dまたは3Dデータを含む。本実施形態では、特徴領域情報記憶部13は、特徴領域を表すデータとして特徴物データを含む。図6は、特徴領域情報記憶部13の構成及び記憶されているデータの例を示す図である。
【0030】
図6に示すように、特徴領域情報記憶部13は、特徴領域を一意に識別する「No」に対応付けて特徴物データ及び色調のデータを記憶している。特徴物データは、上述したように、当該特徴物の形状を表す2Dまたは3Dデータであって、現実空間の画像からの特徴領域検知部14による特徴物の検出(マッチング)に用いられる。色調のデータは、当該特徴物の主要部分の色を表すデータであって、例えばRGB形式で表される。図6を参照すると、特徴領域情報記憶部13は、No「0001」に対応付けて、特徴物データとしてポストを表す3Dデータ、及び当該ポストの主要部分である赤色部分の色調を示すデータ(r1,g1,b1)を記憶している。また、特徴領域情報記憶部13は、No「0002」に対応付けて、特徴物データとして横断歩道を表す2Dデータ、及び当該横断歩道の主要部分である白色部分の色調を示すデータ(r2,g2,b2)を記憶している。さらに、特徴領域情報記憶部13は、No「0003」に対応付けて、特徴物データとして星型オブジェクトを表す2Dデータ、及び当該星型オブジェクトの色調を示すデータ(r3,g3,b3)を記憶している。
【0031】
色調データ記憶部20は、色調の変化量の測定に用いられる色調データを記憶している部分であって、例えば、図7に示す色調テーブルを記憶している。図7に示すように、色調テーブルは、レコードを一意に識別する番号「No」に対応付けて、R値、G値及びB値それぞれの各階調の最大値に対する割合により色調を定義している。色調変化量測定部15は、色調データ記憶部20に記憶されているデータをもとに、色調の変化量を測定する。色調変化量測定部15による詳細な処理は後述する。
【0032】
仮想オブジェクト記憶部17は、仮想オブジェクトに関する仮想オブジェクト情報を予め又は一時的に記憶している部分である。オブジェクト表示装置1が、現実空間の画像から検出したマーカに対応付けてオブジェクトを表示する装置である場合には、仮想オブジェクト情報は、例えば、マーカに対応付けられたオブジェクトデータを含む。また、オブジェクト表示装置1が、現実空間における位置に対応付けられたオブジェクトを表示する装置である場合には、仮想オブジェクト情報は、例えば、位置情報に対応付けられたオブジェクトデータを含む。
【0033】
図8は、仮想オブジェクト記憶部17に記憶されている仮想オブジェクト情報の例を示す図である。図8に示すように、仮想オブジェクト記憶部17は、仮想オブジェクトを識別するIDに対応付けて仮想オブジェクトデータ及び重畳位置を記憶している。仮想オブジェクトデータは、仮想オブジェクトの形状及び色を表すデータである。重畳位置は、当該仮想オブジェクトが重畳表示される位置を示すデータであって、現実空間における絶対的な位置又はマーカ(特徴物)に対する相対的な位置を表す。
【0034】
仮想オブジェクト情報は、仮想オブジェクト記憶部17に予め記憶されていることとしてもよいし、図示しないサーバから所定の通信手段を介して取得されることとしてもよい。仮想オブジェクト情報がサーバから取得される場合には、オブジェクト表示装置1の所在位置を示す位置情報に基づき、仮想オブジェクト情報は、サーバから提供されることとしてもよい。オブジェクトデータは、例えば、オブジェクトの画像データ、又は当該オブジェクトを表すための3Dオブジェクトのデータである。現実空間の画像中においてオブジェクトが重畳表示される位置は、例えば、仮想オブジェクト情報においてオブジェクトデータに対応付けられた位置情報、又は、現実空間の画像中におけるマーカとの相対位置により定義される。
【0035】
画像処理部18は、仮想オブジェクト記憶部17から仮想オブジェクトを取得し、取得した仮想オブジェクトを、撮影部11により取得された現実空間の画像に重畳して、重畳画像を生成する部分である。重畳画像における仮想オブジェクトの重畳位置は、例えば、当該仮想オブジェクトに対応付けられている位置情報、又は現実空間の画像中におけるマーカとの相対位置に基づき決定される。画像処理部18は、生成した重畳画像を表示部19に送出する。
【0036】
また、画像処理部18は、画像特徴抽出部12により抽出された、現実空間の画像に関する所定の特徴に基づき、オブジェクトの画像を補正処理する。具体的な処理は、後に詳細を説明する。
【0037】
表示部19は、画像処理部18により生成及び送出された重畳画像を表示する部分であって、例えばディスプレイといった装置により構成される。重畳画像は、画像処理部18により補正処理されたオブジェクトの画像が、現実空間の画像に重畳された画像である。以下、画像特徴抽出部12および画像処理部18の詳細な機能について説明する。
【0038】
特徴領域検知部14は、撮影部11により取得された現実空間の画像から所定の特徴領域を検出する部分である。具体的には、特徴領域検知部14は、特徴領域情報記憶部13に記憶されている特徴物データに基づき現実空間の画像を探索して、現実空間の画像から特徴物を抽出する。
【0039】
図3に示した現実空間の画像を例に説明すると、特徴領域検知部14は、図6に示した特徴領域情報記憶部13に記憶された特徴物データに基づき現実空間の画像を探索する。そして、特徴領域検知部14は、No「0001」及び「0002」に示される特徴物に該当するポストPst及び横断歩道Crを抽出する。また、特徴領域検知部14は、図4に示した現実空間の画像を探索した場合には、No「0003に示される特徴物に該当する星型オブジェクトを抽出する。現実空間の画像における特徴物が表された領域は、特徴領域を構成する。特徴領域検知部14は、特徴物が抽出された場合に、現実空間の画像における特徴物の位置を表す情報(例えば、現実空間の画像における座標等)を取得し、色調変化量測定部15へ送出する。特徴領域検知部14は、特徴物を抽出できない場合は、その旨を全体画面特徴抽出部16へ通知することとしてもよい。全体画面特徴抽出部16の機能については、後述する。
【0040】
色調変化量測定部15は、特徴領域検知部14において抽出された特徴物に関して、特徴領域情報記憶部13に記憶された当該特徴物に対する色調の変化量を抽出する部分である。具体的には、例えば特徴物の色調がRGB形式で表されている場合には、色調変化量測定部15は、特徴領域情報記憶部13に記憶された特徴物のR値、G値及びB値と、特徴領域検知部14により抽出された特徴物のR値、G値及びB値との差異(特徴物の色調の変化量)をそれぞれ算出する。
【0041】
色調変化量測定部15は、特徴領域情報記憶部13に記憶された特徴物の色調(RGB)に対する特徴領域検知部14により抽出された特徴物の色調(RGB)の変化量に最も近い値を有するレコードを色調テーブルから抽出し、抽出したレコードを当該特徴物の色調の変化量とする。
【0042】
色調変化量測定部15は、特徴領域検知部14から取得した現実空間の画像における特徴物の位置を表す情報と共に、特徴物の色調の変化量の情報を画像処理部18に送出する。
【0043】
また、画像処理部18は、画像特徴抽出部12により抽出された、現実空間の画像に関する所定の特徴に基づき、オブジェクトの画像を補正処理する。具体的には、画像処理部18は、特徴領域検知部14及び色調変化量測定部15により抽出された、複数の特徴物の色調の変化量に基づき、仮想オブジェクト記憶部から取得したオブジェクトの画像を補正処理する。画像処理部は、色調変化量測定部から受信した特徴物の位置を表す情報とオブジェクトの表示位置を比較して、所定の距離以内であるか否かを判定する。また、画像処理部は、色調変化量測定部から受信した各特徴物の色調の変化量を比較して、変化量の差が所定量より小さいか否かを判定する。図9〜12を参照して、複数の特徴物の色調の変化量に基づく、オブジェクトの補正処理の例を説明する。
【0044】
図9は、複数の特徴物C1,C2の色調の変化量の差が所定量より小さい場合におけるオブジェクトV1Aの補正処理の例を示す図である。複数の特徴物の色調の変化量の差が所定量より小さく、当該複数の特徴物から所定距離以内に補正処理対象のオブジェクトが位置する場合に、画像処理部18は、当該複数の特徴物の色調の変化量の平均変化量に基づく色調の補正を当該オブジェクトに対して実施する。
【0045】
色調の補正は、例えば、RGB形式で示された色調の平均変化量に基づきRGB各値の変換パラメータを生成し、オブジェクトを表す各画素のRGB値に当該変換パラメータによる所定の演算処理を施すことにより実現される。この補正処理には、各種の周知の色調補正処理及びフィルタ処理等の手法を適用可能であって、以下の図7,8を参照して説明する例においても同様である。
【0046】
図9(a)に示す例では、例えば、特徴物C1の色調の変化量が、図4に示す色調テーブルにおけるNo1に該当し、特徴物C2の色調の変化量が、色調テーブルにおけるNo2に該当するものとする。この場合には、特徴物C1の色調の変化量と特徴物C2の色調の変化量の差分が所定量より小さいので、画像処理部18は、特徴物C1の色調の変化量及び特徴物C2の色調の変化量の平均変化量に基づき変換パラメータを生成する。そして、図9(b)に示すように、画像処理部18は、生成した変換パラメータを用いて、オブジェクトV1Aに対する色調の補正処理を実施し、色調補正されたオブジェクトV1Bの画像を生成する。
【0047】
図10は、複数の特徴物C3,C4の色調の変化量における各色(RGB)の成分が類似しており、その濃淡に差異がある場合におけるオブジェクトV2Aの補正処理の例を示す図である。複数の特徴物の色調の変化量の成分の差が類似且つ所定量より小さく、当該複数の特徴物から所定距離以内に補正処理対象のオブジェクトが位置する場合に、画像処理部18は、当該複数の特徴物の色調の変化量と、当該複数の特徴物に対するオブジェクトの相対位置に基づき、グラデーション処理を当該オブジェクトに対して実施する。複数の色調の成分が類似している場合は、当該複数の色調が同系色に属し、その濃度に差異がある場合である。画像処理部18は、R、G、Bの各値に着目して、例えば、R値が0%のものを同系色と扱うこととしてもよいが、これに限定されない。
【0048】
図10(a)に示す例では、例えば、特徴物C3の色調の変化量が、図4に示す色調テーブルにおけるNo1に該当し、特徴物C4の色調の変化量が、色調テーブルにおけるNo4に該当するものとする。この場合には、特徴物C3の色調の変化量及び特徴物C4の色調の変化量における各色の成分が類似しており、両特徴物の色調の変化量が同系色に属するので、画像処理部18は、オブジェクトV2Aにグラデーション処理を実施し、図10(b)に示すような色調補正されたオブジェクトV2Bを生成する。
【0049】
具体的には、画像処理部18は、オブジェクトV2Aにおける特徴物C3に最も近い部分を、特徴物C3の色調の変化量に基づき生成された第1の変換パラメータにより色調補正する。一方、画像処理部18は、オブジェクトV2Aにおける特徴物C4に最も近い部分を、特徴物C4の色調の変化量に基づき生成された第2の変換パラメータにより色調補正する。そして、画像処理部18は、オブジェクトV2Aにおける特徴物C3に最も近い部分から特徴物C4に最も近い部分に至る領域に対して、特徴物C3及び特徴物C4からの距離に応じて第1の変換パラメータ値から第2の変換パラメータ値に変換パラメータの値を徐々に変化させながら、色調補正処理を実施する。
【0050】
図11は、複数の特徴物C5,C6の色調の変化量の差が所定量より大きい場合におけるオブジェクトV3Aの補正処理の例を示す図である。複数の特徴物C5,C6の色調の変化量が顕著に異なる場合には、例えば、色調が異なる複数の光源が現実空間の画像中に存在すると想定される。複数の特徴物の色調の変化量の差が所定量より大きい場合に、画像処理部18は、色調補正対象のオブジェクトとの距離がより近い特徴物の色調の変化量に基づく色調の補正を当該オブジェクトに対して実施する。
【0051】
図11(a)に示す例では、例えば、特徴物C5の色調の変化量が、図4に示す色調テーブルにおけるNo1に該当し、特徴物C6の色調の変化量が、色調テーブルにおけるNo15に該当するものとする。この場合には、特徴物C5の色調の変化量と特徴物C6の色調の変化量の差分が所定量より大きく、且つオブジェクトV3Aの位置が特徴物C5の位置近傍に偏っており所定距離以下であるので、画像処理部18は、特徴物C5の色調の変化量に基づき変換パラメータを生成する。そして、図11(b)に示すように、画像処理部18は、生成した変換パラメータを用いて、オブジェクトV3Aに対する色調の補正処理を実施し、色調補正されたオブジェクトV3Bの画像を生成する。
【0052】
図12は、複数の特徴物C7,C8の色調の変化量の差が所定量より大きく、且つ、オブジェクトV4Aと特徴物C7,C8のそれぞれとの距離が同程度である場合におけるオブジェクトV4Aの補正処理の例を示す図である。図12(a)に示す例は、図11に示した例と同様に、例えば、色調が異なる複数の光源が現実空間の画像中に存在すると想定される。この場合には、図12(b)に示すように、画像処理部18は、オブジェクトV4Aを特徴物C7の位置により近い第1の領域V4B1及び特徴物C8の位置により近い第2の領域V4B2に分割し、第1の領域V4B1を特徴物C7の色調の変化量に基づき生成した変換パラメータにより色調補正し、第2の領域V4B2を特徴物C8の色調の変化量に基づき生成した変換パラメータにより色調補正することとしてもよい。
【0053】
全体画面特徴抽出部16は、現実空間の画像全体の色調に関する特徴(補正色情報)を、補正色として抽出する部分である。具体的には、全体画面特徴抽出部16は、例えば、現実空間の画像全体の色調に関する特徴として、例えば、画像全体における支配的な色成分、画像全体の色調の平均の色調、ノイズ分布を抽出する。全体画面特徴抽出部16は、抽出した補正色を画像処理部18へ送出する。
【0054】
図13(a)を参照して、全体画面特徴抽出部16による支配的な色成分の抽出処理を説明する。図13(a)は、現実空間の画像の色調の分布を模式的に示す図である。図13(a)に示す画像は、例えば、図5に示した現実空間の画像を所定の大きさの単位領域に分割し、各領域に含まれる画素の色調の平均値を当該領域全体の色調とすることにより得られる。図13(a)に示す画像では、領域R1は、図5に示した画像の背景に由来する色調を有し、領域R2は、雲Crdに由来する色調を有し、領域R3は、建物Bdに由来する色調を有している。全体画面特徴抽出部16は、図13(a)に示す現実空間の画像を解析して、領域R1の色調を支配的色成分として抽出し、領域R1の色調をオブジェクトの補正処理のための補正色として抽出する。画像からの支配的な色成分の抽出処理は、画像全体を単位領域に区切って色調の解析を行なうなど、周知の解析手法により実施可能である。
【0055】
画像全体の色調の平均の色調の抽出処理としては、全体画面特徴抽出部16は、領域R1、領域R2、領域R3の各々のピクセル数及び当該領域の色調を示すRGB値に基づき現実空間の画像全体の色調の平均の色調を算出し、算出した平均に色調をオブジェクトの補正処理のための補正色として抽出する。
【0056】
また、全体画面特徴抽出部16は、現実空間の画像におけるノイズの分布に関する特徴を抽出する。具体的には、全体画面特徴抽出部16は、現実空間の画像におけるノイズを検出し、検出したノイズの密度といった情報を含む、ノイズの分布情報を抽出する。
【0057】
図14(a)を参照して、全体画面特徴抽出部16による現実空間の画像全体のノイズの分布に関する特徴の抽出処理の例を説明する。図14(a)は、現実空間の画像のノイズの分布を模式的に示す図である。
【0058】
全体画面特徴抽出部16は、現実空間の画像から一のピクセルを選択し、当該一のピクセルの周囲のピクセルの色を表す値の平均値に対して、当該一のピクセルの色を表す値が所定以上相違する場合に、当該一のピクセルをノイズを判断する。図14(a)に示す例では、全体画面特徴抽出部16は、ピクセルP1,P2,P4及びP5をノイズと判断する。一方、ピクセルP3の色は、その周囲の色と相違しているが、その相違が所定以上ではないので、全体画面特徴抽出部16は、ピクセルP3をノイズと判断しない。全体画面特徴抽出部16は、例示したような処理方法により現実空間の画像からノイズを検出し、そのノイズの密度を、ノイズの分布に関する情報として抽出する。そして、全体画面特徴抽出部16は、抽出されたノイズの分布に関する情報を画像処理部18に送出する。
【0059】
全体画面特徴抽出部16は、抽出されたオブジェクトの補正処理のための補正色に関する情報(補正色情報)を画像処理部18に送出する。
【0060】
画像処理部18は、全体画面特徴抽出部16により抽出された現実空間の画像全体の色調に関する特徴に基づきオブジェクトの画像を補正処理する。具体的には、画像処理部18は、全体画面特徴抽出部16から、現実空間の画像全体の色調から抽出された補正色に関する補正色情報を取得する。画像処理部18は、例えばRGB形式で表された補正色情報に基づき、RGB各値の変換パラメータを生成する。そして、画像処理部18は、オブジェクトを表す各画素のRGB値に当該変換パラメータによる所定の演算処理を施すことにより、オブジェクトの画像の補正処理を実施する。変換パラメータの生成及び変換パラメータによる演算処理は、各種の周知の色調補正処理及びフィルタ処理等における手法を適用可能である。
【0061】
図13(b)は、画像処理部18による補正処理が実施されていない場合の重畳画像の例を示す図である。図13(b)に示すように、オブジェクトV5Aは、現実空間の画像全体の色調が反映されていないので、違和感のある重畳画像となる。一方、図13(c)は、画像処理部18による現実空間の画像全体の支配的な色成分による補正処理が実施された場合の重畳画像の例を示す図である。図13(c)に示すように、オブジェクトV5Bは、現実空間の画像全体の支配的な色成分による補正処理(乗算処理)が施されているので、重畳画像における違和感が軽減されている。
【0062】
さらに、画像処理部18は、全体画面特徴抽出部16により抽出された、現実空間の画像におけるノイズの分布に関する特徴に基づきオブジェクトの画像を補正処理することができる。具体的には、画像処理部18は、全体画面特徴抽出部16から、ノイズの密度といった情報を含むノイズの分布情報を取得する。そして、画像処理部18は、取得したノイズの分布情報に従って、補正対象のオブジェクトに対して、ノイズを付加する画像処理を実施する。ノイズは、例えば、所定のサイズを有する白色の点をオブジェクトに重畳することにより表される。この画像処理により、オブジェクトは、現実空間の画像全体と同様のノイズを有することとなる。
【0063】
図14(b)は、画像処理部18による補正処理が実施されていない場合の重畳画像の例を示す図である。図14(b)に示すように、オブジェクトV5Aは、現実空間の画像全体に発生したノイズの状態が反映されていないので、違和感のある重畳画像となる。一方、図14(c)は、画像処理部18によるノイズの分布情報による補正処理が実施された場合の重畳画像の例を示す図である。図13(c)に示すように、オブジェクトV5Bは、現実空間の画像全体に発生したノイズと同様のノイズが付加される補正処理が施されているので、重畳画像における違和感が軽減されている。
【0064】
なお、ノイズの分布情報による補正は、前述の支配的な色成分による色調補正と併せて実施してもよいし、平均の色調による色調補正と併せて実施してもよい。
【0065】
上述のように、画像処理部18は、色調変化量測定部15や全体画面特徴抽出部16から取得した補正色情報に基づいて、オブジェクトの色調を補正し、重畳画像を表示部19へ送出する。このようにして、表示部19に重畳画像が表示される。
【0066】
続いて、オブジェクト表示装置1におけるオブジェクト表示方法の処理内容を説明する。図15〜17は、オブジェクト表示方法の処理内容を示すフローチャートである。
【0067】
まず、図15のフローチャートを参照すると、オブジェクト表示装置1は、仮想オブジェクトの画像補正機能がONに設定されているか否かを判定する(S1)。画像補正機能がONに設定されていると判定された場合には、処理手順はステップS2に進められる。一方、画像補正機能がONに設定されていると判定されなかった場合には、処理手順はステップS9に進められ、仮想オブジェクトの補正は実施されない。
【0068】
ステップS2において、撮影部11は、現実空間の画像を取得する(S2)。続いて、画像特徴抽出部12の特徴領域検知部14は、現実空間の画像から特徴物の検出を試み(S3)、特徴物が検出されたか否かを判定する(S4)。特徴物が検出されたと判定された場合には、処理手順はステップS5に進められる。一方、特徴物が検出されたと判定されなかった場合には、処理手順は図10に示されるフローチャートのステップS10に進められる。
【0069】
ステップS5において、画像特徴抽出部12の色調変化量測定部15は、特徴領域情報記憶部13を参照して特徴領域検知部14において抽出された特徴物の色調の変化量の抽出を試み、特徴物の色調に変化があるか否かを判定する(S5)。特徴物の色調に変化があると判定した場合には、処理手順はステップS6に進められる。一方、特徴物の色調に変化があると判定しなかった場合には、処理手順はステップS9に進められ、仮想オブジェクトの補正は実施されない。
【0070】
ステップS6において、画像特徴抽出部12は、色調の変化が検出された特徴物が複数であるか否かを判定する(S6)。特徴物が複数であると判定された場合には、処理手順はステップS7に進められる。一方、特徴物が複数であると判定されなかった場合には、処理手順はステップS8に進められる。
【0071】
ステップS7において、画像処理部18は、複数の特徴物の色調の変化量に基づき、仮想オブジェクト記憶部17から取得したオブジェクトの画像を補正処理する(S7)。一方、ステップS8において、画像処理部18は、一の特徴物の色調の変化量に基づき、仮想オブジェクト記憶部17から取得したオブジェクトの画像を補正処理する(S8)。また、ステップS9において、画像処理部18は、オブジェクトに対する補正処理を実施しない。
【0072】
続いて、図16を参照して、ステップS4において特徴物が検出されたと判定されなかった場合の処理を説明する。ステップS10において、画像特徴抽出部12の全体画面特徴抽出部16は、現実空間の画像全体から、画像に関する特徴の抽出を試みる(S10)。ここで抽出される特徴は、現実空間の画像全体の色調に関する特徴、及びノイズの分布に関する特徴を含む。現実空間の画像全体から特徴が抽出された場合には、処理手順はステップS12に進められる。一方、現実空間の画像全体から特徴が抽出されなかった場合には、処理手順はステップS13に進められ、仮想オブジェクトの補正は実施されない。
【0073】
ステップS12において、画像処理部18は、全体画面特徴抽出部16により抽出された現実空間の画像全体の特徴に基づきオブジェクトの画像を補正処理する(S12)。ステップS12における補正処理は、画像全体における支配的な色成分や画像全体の色調の平均の色調といった色調に基づく補正及び画像全体におけるノイズ分布に基づく補正を含む。また、色調に基づく補正及びノイズ分布に基づく補正の両方が実施されることとしてもよい。
【0074】
次に、図17を参照して、図15におけるステップS7の処理を詳細に説明する。まず、画像処理部18は、複数の特徴物の色調の変化量を比較し(S14)、変化量の差分が所定量より大きいか否かを判定する(S15)。変化量の差分が所定量より大きいと判定された場合には、処理手順はステップS16に進められる。一方、変化量の差分が所定量より大きいと判定されなかった場合には、処理手順はステップS19に進められる。
【0075】
ステップS16において、画像処理部18は、特徴物とオブジェクトの位置が所定距離以内か否かを判定する(S16)。特徴物とオブジェクトの位置が所定距離以内であると判定された場合には,処理手順はステップS17に進められる。一方、特徴物とオブジェクトの位置が所定距離以内であると判定されなかった場合には,処理手順はステップS18に進められる。
【0076】
ステップS17において、画像処理部18は、色調補正対象のオブジェクトのより近傍に位置する特徴物の色調の変化量に基づく色調の補正を当該オブジェクトに対して実施する(S17)。一方、ステップS18において、画像処理部18は、オブジェクトを特徴物のそれぞれにより近い第1の領域及び第2の領域に分割し、領域ごとに各々の領域の近傍に位置する特徴物の色調の変化量基づき色調補正する(S18)。
【0077】
また、ステップS19において、画像処理部18は、特徴物とオブジェクトの位置が所定距離以内か否かを判定する(S19)。特徴物とオブジェクトの位置が所定距離以内であると判定された場合には,処理手順はステップS20に進められる。一方、特徴物とオブジェクトの位置が所定距離以内であると判定されなかった場合には,処理手順はステップS21に進められる。
【0078】
ステップS20において、画像処理部18は、各特徴物の色調の変化量に基づきオブジェクトにグラデーション処理を実施する(S20)。一方、ステップS21において、画像処理部18は、複数の特徴物の色調の変化量の平均変化量に基づく色調の補正をオブジェクトに対して実施する(S21)。
【0079】
そして、ステップS7〜S9,S12〜S13,S17〜S18,S20〜S21の処理手順を経て、画像処理部18は、現実空間の画像にオブジェクトを重畳した重畳画像を生成し、表示部19は、画像処理部18により生成された重畳画像を表示する。
【0080】
本実施形態では、画像特徴抽出部12は、複数の特徴物(特徴領域)の色調の変化量を取得するための特徴領域検知部14及び色調変化量測定部15、並びに現実空間の画像全体の特徴を抽出するための全体画面特徴抽出部16を有することとしているが、特徴領域検知部14及び色調変化量測定部15と、全体画面特徴抽出部16とのうちのいずれか一方を備えることとしてもよい。即ち、画像処理部18は、複数の特徴物の色調の変化量及び現実空間の画像全体の特徴のいずれか一方に基づき、オブジェクトの画像の補正処理を実施することとしてもよい。
【0081】
図18は、複数の特徴物の色調の変化量に基づき、オブジェクトの画像の補正処理を実施する処理を示すフローチャートである。ステップS31〜S33の処理は、図15のフローチャートにおけるS1〜S3の処理と同様である。続くステップS34において、特徴領域検知部14は、特徴物が検出されたか否かを判定する(S34)。特徴物が検出されたと判定された場合には、処理手順はステップS35に進められ、画像処理部18は、ステップS5〜9と同様の処理内容であるステップS35〜S39において、複数の特徴物の色調の変化量に基づくオブジェクトの補正処理を実施する。
【0082】
一方、ステップS34において特徴物が検出されたと判定されなかった場合には、処理手順はステップS39に進められ、仮想オブジェクトの補正処理は実施されない。図18のフローチャートにより説明した処理では、オブジェクト表示装置1は、特徴物の色調に関する情報を有しており、このような特徴物の色調の変化に基づきオブジェクトの色調を補正するので、容易に補正処理を実施できる。
【0083】
一方、図19は、現実空間の画像全体の特徴に基づき、オブジェクトの画像の補正処理を実施する処理を示すフローチャートである。まず、オブジェクト表示装置1は、仮想オブジェクトの画像補正機能がONに設定されているか否かを判定する(S41)。画像補正機能がONに設定されていると判定された場合には、処理手順はステップS42に進められる。一方、画像補正機能がONに設定されていると判定されなかった場合には、処理手順はステップS46に進められ、仮想オブジェクトの補正は実施されない。
【0084】
ステップS42において、撮影部11は、現実空間の画像を取得する(S42)。続いて、画像特徴抽出部12の全体画面特徴抽出部16は、現実空間の画像全体から、画像に関する特徴の抽出を試みる(S43)。ここで抽出される特徴は、現実空間の画像全体の色調に関する特徴、及びノイズの分布に関する特徴を含む。現実空間の画像全体から特徴が抽出された場合には、処理手順はステップS45に進められる(S44)。
【0085】
一方、現実空間の画像全体から特徴が抽出されなかった場合には(S44)、処理手順はステップS46に進められ、仮想オブジェクトの補正は実施されない。ステップS45において、画像処理部18は、全体画面特徴抽出部16により抽出された現実空間の画像全体の特徴に基づきオブジェクトの画像を補正処理する(S45)。図19のフローチャートにより説明した処理では、オブジェクト表示装置1は、現実空間の画像全体の色調等に基づきオブジェクトの補正処理を実施するので、重畳画像におけるオブジェクトの違和感が軽減される。
【0086】
次に、コンピュータを、本実施形態のオブジェクト表示装置1として機能させるためのオブジェクト表示プログラムについて説明する。図20は、図1に示したオブジェクト表示装置1に対応するオブジェクト表示プログラム1mの構成を示す図である。
【0087】
オブジェクト表示プログラム1mは、オブジェクト表示処理を統括的に制御するメインモジュール10m、撮影モジュール11m、画像特徴抽出モジュール12m、特徴領域情報記憶モジュール13m、仮想オブジェクト記憶モジュール17m、画像処理モジュール18m、表示モジュール19m及び色調データ記憶モジュール20mを備えて構成される。また、画像特徴抽出モジュール12mは、特徴領域検知モジュール14m、色調変化量測定モジュール15m及び全体画面特徴抽出モジュール16mを含む。そして、各モジュール10m〜20mにより、オブジェクト表示装置1における各機能部11〜20のための各機能が実現される。なお、オブジェクト表示プログラム1mは、通信回線等の伝送媒体を介して伝送される態様であってもよいし、図11に示されるように、記録媒体1dのプログラム格納領域1rに記憶される態様であってもよい。
【0088】
本実施形態のオブジェクト表示装置1、オブジェクト表示方法及びオブジェクト表示プログラム1mによれば、撮影部11により取得された現実空間の画像から、画像特徴抽出部12により、複数の特徴物又は現実空間の画像全体から画像に関する所定の特徴が抽出される。そして、画像に関する特徴に基づきオブジェクトの画像が補正処理されるので、オブジェクトの画像に対して現実空間の画像の特徴が適切に反映される。従って、現実空間の画像にオブジェクトを重畳表示させた重畳画像におけるオブジェクトの画像の違和感が軽減される。
【0089】
以上、本発明をその実施形態に基づいて詳細に説明した。しかし、本発明は上記実施形態に限定されるものではない。本発明は、その要旨を逸脱しない範囲で様々な変形が可能である。
【符号の説明】
【0090】
1…オブジェクト表示装置、1d…記録媒体、1m…オブジェクト表示プログラム、1r…プログラム格納領域、10m…メインモジュール、11…撮影部、11m…撮影モジュール、12…画像特徴抽出部、12m…画像特徴抽出モジュール、13…特徴領域情報記憶部、13m…特徴領域情報記憶モジュール、14…特徴領域検知部、14m…特徴領域検知モジュール、15…色調変化量測定部、15m…色調変化量測定モジュール、16…全体画面特徴抽出部、16m…全体画面特徴抽出モジュール、17…仮想オブジェクト記憶部、17m…仮想オブジェクト記憶モジュール、18…画像処理部、18m…画像処理モジュール、19…表示部、19m…表示モジュール、20…色調データ記憶部、20m…色調データ記憶モジュール。
【特許請求の範囲】
【請求項1】
現実空間の画像にオブジェクトを重畳表示するオブジェクト表示装置であって、
現実空間の画像を取得する撮影手段と、
前記撮影手段により取得された現実空間の画像から検出された複数の所定の特徴領域又は前記現実空間の画像全体の、画像に関する所定の特徴を抽出する画像特徴抽出手段と、
前記画像特徴抽出手段により抽出された所定の特徴に基づき、前記オブジェクトの画像を補正処理する画像処理手段と、
前記画像処理手段により補正処理されたオブジェクトの画像を、前記現実空間の画像に重畳した重畳画像を表示する表示手段と
を備えるオブジェクト表示装置。
【請求項2】
前記画像特徴抽出手段は、
前記特徴領域が検出されなかった場合に、前記現実空間の画像全体から所定の特徴を抽出する、
請求項1に記載のオブジェクト表示装置。
【請求項3】
少なくとも前記特徴領域の色調に関する特徴領域情報を当該特徴領域に対応付けて記憶している特徴領域情報記憶手段を備え、
前記画像特徴抽出手段は、前記特徴領域情報記憶手段に記憶された色調に対する、前記現実空間の画像における複数の前記特徴領域の色調の変化量を抽出し、
前記画像処理手段は、前記画像特徴抽出手段により抽出された色調の変化量に基づき前記オブジェクトの画像を補正処理する、
請求項1または2に記載のオブジェクト表示装置。
【請求項4】
前記画像処理手段は、前記現実空間の画像における前記特徴領域の位置に対する前記オブジェクトの重畳位置に応じて、前記オブジェクトの画像を補正処理する、
請求項3に記載のオブジェクト表示装置。
【請求項5】
前記画像特徴抽出手段は、前記現実空間の画像全体の色調に関する特徴を抽出し、
前記画像処理手段は、前記画像特徴抽出手段により抽出された現実空間の画像全体の色調に関する特徴に基づき補正処理する
請求項1〜4のいずれか1項に記載のオブジェクト表示装置。
【請求項6】
前記画像特徴抽出手段は、前記現実空間の画像におけるノイズの分布に関する特徴を抽出し、
前記画像処理手段は、前記画像特徴抽出手段により抽出された前記ノイズの分布に関する特徴に基づき補正処理する
請求項1〜5のいずれか1項に記載のオブジェクト表示装置。
【請求項7】
現実空間の画像にオブジェクトを重畳表示するオブジェクト表示装置におけるオブジェクト表示方法であって、
現実空間の画像を取得する撮影ステップと、
前記撮影ステップにおいて取得された現実空間の画像から検出された複数の特徴領域又は前記現実空間の画像全体の、画像に関する所定の特徴を抽出する画像特徴抽出ステップと、
前記画像特徴抽出ステップにおいて抽出された所定の特徴に基づき、前記オブジェクトの画像を補正処理する画像処理ステップと、
前記画像処理ステップにおいて補正処理されたオブジェクトの画像を、前記現実空間の画像に重畳した重畳画像を表示する表示ステップと
を有するオブジェクト表示方法。
【請求項8】
コンピュータを、現実空間の画像にオブジェクトを重畳表示するオブジェクト表示装置として機能させるためのオブジェクト表示プログラムであって、
前記コンピュータに、
現実空間の画像を取得する撮影機能と、
前記撮影機能により取得された現実空間の画像から検出された複数の特徴領域又は前記現実空間の画像全体の、画像に関する所定の特徴を抽出する画像特徴抽出機能と、
前記画像特徴抽出機能により抽出された所定の特徴に基づき、前記オブジェクトの画像を補正処理する画像処理機能と、
前記画像処理機能により補正処理されたオブジェクトの画像を、前記現実空間の画像に重畳した重畳画像を表示する表示機能と
を実現させるオブジェクト表示プログラム。
【請求項1】
現実空間の画像にオブジェクトを重畳表示するオブジェクト表示装置であって、
現実空間の画像を取得する撮影手段と、
前記撮影手段により取得された現実空間の画像から検出された複数の所定の特徴領域又は前記現実空間の画像全体の、画像に関する所定の特徴を抽出する画像特徴抽出手段と、
前記画像特徴抽出手段により抽出された所定の特徴に基づき、前記オブジェクトの画像を補正処理する画像処理手段と、
前記画像処理手段により補正処理されたオブジェクトの画像を、前記現実空間の画像に重畳した重畳画像を表示する表示手段と
を備えるオブジェクト表示装置。
【請求項2】
前記画像特徴抽出手段は、
前記特徴領域が検出されなかった場合に、前記現実空間の画像全体から所定の特徴を抽出する、
請求項1に記載のオブジェクト表示装置。
【請求項3】
少なくとも前記特徴領域の色調に関する特徴領域情報を当該特徴領域に対応付けて記憶している特徴領域情報記憶手段を備え、
前記画像特徴抽出手段は、前記特徴領域情報記憶手段に記憶された色調に対する、前記現実空間の画像における複数の前記特徴領域の色調の変化量を抽出し、
前記画像処理手段は、前記画像特徴抽出手段により抽出された色調の変化量に基づき前記オブジェクトの画像を補正処理する、
請求項1または2に記載のオブジェクト表示装置。
【請求項4】
前記画像処理手段は、前記現実空間の画像における前記特徴領域の位置に対する前記オブジェクトの重畳位置に応じて、前記オブジェクトの画像を補正処理する、
請求項3に記載のオブジェクト表示装置。
【請求項5】
前記画像特徴抽出手段は、前記現実空間の画像全体の色調に関する特徴を抽出し、
前記画像処理手段は、前記画像特徴抽出手段により抽出された現実空間の画像全体の色調に関する特徴に基づき補正処理する
請求項1〜4のいずれか1項に記載のオブジェクト表示装置。
【請求項6】
前記画像特徴抽出手段は、前記現実空間の画像におけるノイズの分布に関する特徴を抽出し、
前記画像処理手段は、前記画像特徴抽出手段により抽出された前記ノイズの分布に関する特徴に基づき補正処理する
請求項1〜5のいずれか1項に記載のオブジェクト表示装置。
【請求項7】
現実空間の画像にオブジェクトを重畳表示するオブジェクト表示装置におけるオブジェクト表示方法であって、
現実空間の画像を取得する撮影ステップと、
前記撮影ステップにおいて取得された現実空間の画像から検出された複数の特徴領域又は前記現実空間の画像全体の、画像に関する所定の特徴を抽出する画像特徴抽出ステップと、
前記画像特徴抽出ステップにおいて抽出された所定の特徴に基づき、前記オブジェクトの画像を補正処理する画像処理ステップと、
前記画像処理ステップにおいて補正処理されたオブジェクトの画像を、前記現実空間の画像に重畳した重畳画像を表示する表示ステップと
を有するオブジェクト表示方法。
【請求項8】
コンピュータを、現実空間の画像にオブジェクトを重畳表示するオブジェクト表示装置として機能させるためのオブジェクト表示プログラムであって、
前記コンピュータに、
現実空間の画像を取得する撮影機能と、
前記撮影機能により取得された現実空間の画像から検出された複数の特徴領域又は前記現実空間の画像全体の、画像に関する所定の特徴を抽出する画像特徴抽出機能と、
前記画像特徴抽出機能により抽出された所定の特徴に基づき、前記オブジェクトの画像を補正処理する画像処理機能と、
前記画像処理機能により補正処理されたオブジェクトの画像を、前記現実空間の画像に重畳した重畳画像を表示する表示機能と
を実現させるオブジェクト表示プログラム。
【図1】


【図2】
【図3】
【図4】
【図6】
【図7】
【図8】
【図9】
【図11】
【図12】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図5】
【図10】
【図13】
【図14】
【図2】
【図3】
【図4】
【図6】
【図7】
【図8】
【図9】
【図11】
【図12】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図5】
【図10】
【図13】
【図14】
【公開番号】特開2013−25329(P2013−25329A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−156053(P2011−156053)
【出願日】平成23年7月14日(2011.7.14)
【出願人】(392026693)株式会社エヌ・ティ・ティ・ドコモ (5,876)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月14日(2011.7.14)
【出願人】(392026693)株式会社エヌ・ティ・ティ・ドコモ (5,876)
【Fターム(参考)】
[ Back to top ]