
オートレベリングシステム
【課題】ノイズに強く、かつ高精度の制御が行えるオートレベリングシステムを提供する。
【解決手段】オートレベリングコントローラ10とレベライザ20とを備え、レベライザは、車両のヘッドライトを駆動する駆動モータ21と、外部から入力される補正信号に従って駆動モータ21を駆動して前記ヘッドライトの照射方向を補正する制御回路24とを有し、オートレベリングコントローラは、車両の状態から前記照射方向の補正が必要か否か判断して、前記照射方向の補正が必要な場合にはこの補正を指令する前記補正信号を制御回路24に対して送信する制御回路11を有し、制御回路11と制御回路24との間で送受信される信号がデジタル信号として送受信可能となるように、制御回路24にはデジタル信号入力部(デジタル入力ポートRx)が設けられた構成とする。
【解決手段】オートレベリングコントローラ10とレベライザ20とを備え、レベライザは、車両のヘッドライトを駆動する駆動モータ21と、外部から入力される補正信号に従って駆動モータ21を駆動して前記ヘッドライトの照射方向を補正する制御回路24とを有し、オートレベリングコントローラは、車両の状態から前記照射方向の補正が必要か否か判断して、前記照射方向の補正が必要な場合にはこの補正を指令する前記補正信号を制御回路24に対して送信する制御回路11を有し、制御回路11と制御回路24との間で送受信される信号がデジタル信号として送受信可能となるように、制御回路24にはデジタル信号入力部(デジタル入力ポートRx)が設けられた構成とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両のヘッドライトの照射方向を自動補正するオートレベリングシステムに関する。
【背景技術】
【0002】
車のヘッドライトが、正しい照射方向から極端に上向き又は下向きにならないように調整・制御することを「レベリング」という。これを自動的に行うのが「オートレベリングシステム」である。
このオートレベリングシステムは、例えば特許文献1にみられるように、車両のヘッドライト(ヘッドランプともいう)の光軸が車体に対し上下に傾動するように前記ヘッドライトを駆動するアクチュエータと、車両の荷重状態などから推定される車両の傾斜状態などから前記ヘッドライトの照射方向(光軸の方向)の現状を把握し、前記照射方向の補正が必要か否か判断して、前記照射方向の補正が必要な場合には、この補正を指令する補正信号を生成して前記アクチュエータ側に対して生成した補正信号を送信するコントローラ(例えばマイクロコンピュータよりなるものであり、本願発明のオートレベリングコントローラに相当)と、を備える。
そして従来、このオートレベリングシステムは、上記コントローラから前記補正信号として電圧レベルを用いたアナログ信号をレベライザ(前記アクチュエータ側)に送り、このアナログ信号による指令に従ってレベライザを作動させることで照射方向の調整を行っていた。このようにレベライザへの信号にアナログ信号を使用していたことの背景には、レベライザを手動式レベリングと共用していたことがある。なお本明細書において、「レベライザ」とは、オートレベリングシステムの構成要素のうちで前記アクチュエータやその駆動回路を含む前記アクチュエータ側の要素を意味し、上記コントローラ(オートレベリングコントローラ)を含まない概念である。
【0003】
【特許文献1】特開2005−313763号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、従来のオートレベリングシステムは、レベライザがアナログ信号の入力でのみ制御されるため、ノイズに弱い、あるいは高い精度の補正信号を送ることが難しい、といった課題があった。即ち、電圧レベルにて補正信号を送出するため、車両の状況による外乱ノイズにより、電源電圧やグランド電位がふらつくと、アクチュエータの駆動回路が誤作動し、ランプの照射方向がふらついてしまう問題があった。このため、コントローラの信号送出部とアクチュエータの駆動回路の電源電圧やグランド電位を一致させる対策や、場合によっては、信号線にノイズをシールドする対策を施すことが必要となる。また、レベライザはアナログ信号しか受信できないため、オートレベリングコントローラには高精度の電源やD/A変換回路が必要となり、高精度の補正信号を送出することが厳しくなっている。
【0005】
また、コントローラからレベライザへの一方向の通信しかできないために、レベライザが故障したときなど、故障を把握することが困難であるという課題もあった。即ち、コントローラは電圧レベルにて信号を一方向に送信しているため、レベライザに故障があっても故障情報を検知することができない。つまり、レベライザからコントローラへ故障情報を通知することができない。また、市場の動向として車両のコントロールユニットは故障診断情報を送出する傾向にあるが、現在のアナログ信号を使用するシステムでは、その流れに追従することができない。
また、コントローラは補正信号を常に送信し続け、レベライザはそれを受信することで動作するため、補正信号の送信が止まるとレベライザはヘッドライトの照射方向を原点姿勢に戻そうとアクチュエータを作動させてしまう問題があった。即ち、例えば、コントローラがリセットした時にはレベライザが動作してしまう課題もあった。
本発明は、上記事情に鑑みてなされたものであり、少なくとも、ノイズに強く、かつ高精度の制御が行えるオートレベリングシステムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本願発明は、オートレベリングコントローラとレベライザとを備える車両のオートレベリングシステムであって、
前記レベライザは、
車両のヘッドライトの光軸が車体に対し上下に傾動するように前記ヘッドライトを駆動するアクチュエータと、外部から入力される補正信号に従って前記アクチュエータを駆動して前記ヘッドライトの照射方向を補正するアクチュエータ側制御手段と、を有し、
前記オートレベリングコントローラは、
車両の状態から前記照射方向の補正が必要か否か判断して、前記照射方向の補正が必要な場合にはこの補正を指令する前記補正信号を生成し、この補正信号を前記アクチュエータ側制御手段に対して送信するコントローラ側制御手段を有し、
前記コントローラ側制御手段と前記アクチュエータ側制御手段との間で送受信される信号がデジタル信号として送受信可能となるように、前記アクチュエータ側制御手段にはデジタル信号入力部が設けられていることを特徴とするオートレベリングシステム。
本願発明によれば、アクチュエータ側制御手段にデジタル信号入力部を設けて、レベライザがデジタル信号を受けつけるようにしたことで、システム瞬断や車両配線ノイズに対して影響を受けないロバスト性の高いデジタル信号による補正信号の送受信が可能となり、ノイズに強く、かつ高精度の制御が行える。また、D/A出力回路や高精度の部品を必要としない高精度な信号の送受信が可能となる。
【0007】
次に、本願発明の好ましい態様は、前記アクチュエータ側制御手段は、前記補正信号を新たに受信するまで、前記照射方向を、最後に前記照射方向が設定又は補正された状態に保持することを特徴とする。
この態様であると、オートレベリングコントローラが停止したとしても、ヘッドライトが不用意に動くことがなくなる。
また、本願発明の別の好ましい態様は、前記アクチュエータ側制御手段と前記コントローラ側制御手段との間で双方向に情報を伝達出来るように、前記アクチュエータ側制御手段にはデジタル信号出力部も設けられていることを特徴とする。
この態様であると、レベライザからの情報出力(例えば、故障情報の出力)が可能となり、システムとしての高度な制御(例えば、後述するフェール処理)が行えるようになり、安全性向上等が図れる。
【0008】
また、本願発明の別の好ましい態様は、前記アクチュエータ側制御手段は、前記コントローラ側制御手段からの信号としてアナログ信号とデジタル信号のどちらでも受信可能となるように、アナログ信号入力部も有することを特徴とする。
この態様であると、従来のアナログ信号を使用したシステムにも対応できる。
また、本願発明の別の好ましい態様は、前記アクチュエータ側制御手段は、前記コントローラ側制御手段から送信される信号がアナログ信号かデジタル信号かを所定時点で(例えば電源投入時に)判定し、この判定結果に基づいて有効な信号入力部を前記デジタル信号入力部又は前記アナログ信号入力部の何れかに切り替える機能を有することを特徴とする。
この態様であると、レベライザがアナログ信号かデジタル信号かを自動判定して有効な信号入力部を切り替えるので、制御の切り分けが不要となる。
【発明の効果】
【0009】
本願発明によれば、アクチュエータ側制御手段にデジタル信号入力部を設けて、レベライザがデジタル信号を受けつけるようにしたことで、システム瞬断や車両配線ノイズに対して影響を受けないロバスト性の高いデジタル信号による補正信号の送受信が可能となり、ノイズに強く、かつ高精度の制御が行える。また、D/A出力回路や高精度の部品を必要としない高精度な信号の送受信が可能となる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の実施の形態の各例を図面に基づいて説明する。
(第1形態例)
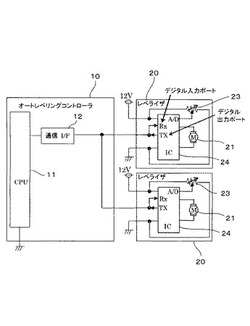
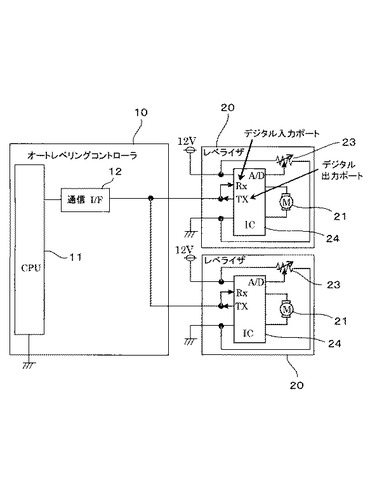
まず第1形態例を説明する。図1は、本例のオートレベリングシステムの全体構成を示す回路図である。図2は、同システムを構成するレベライザの詳細構成を示す回路図である。
図1に示すように、本例のオートレベリングシステムは、オートレベリングコントローラ10とレベライザ20とを備える。オートレベリングコントローラ10は、レベライザ20とは別のユニットとして一台の車両に対して一つ設けられている。レベライザ20は、車両の左右のヘッドライトに対してそれぞれ一つ設けられ、一台の車両に対して合計二つ設けられている。二つのレベライザ20は、同じ構成である。なお、ヘッドライトが一つの車両(バイクなど)の場合には、レベライザ20は当然1個になるし、仮にヘッドライトが三つ以上ある車両の場合には、レベライザ20の数はそれに対応して3個以上になってもよい。
【0011】
オートレベリングコントローラ10は、マイクロコンピュータを含む制御回路11と、通信I/F回路12とを備える。
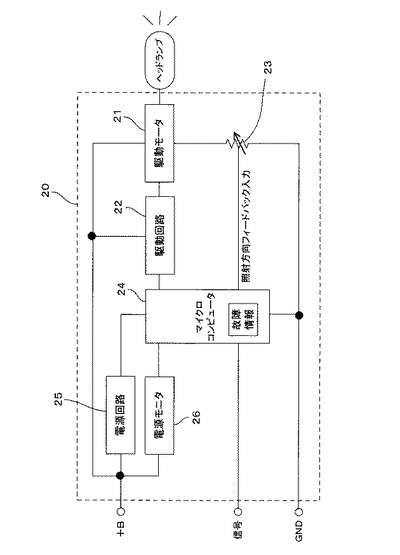
一方、レベライザ20は、図2に示すように、駆動モータ21(アクチュエータ)と、駆動モータ21を駆動するための駆動回路22と、位置検出器23と、マイクロコンピュータを含む制御回路24と、電源回路25と、電源モニタ回路26とを備える。なお図1では、駆動回路22、電源回路25及び電源モニタ回路26の図示を省略している。
制御回路11は、車両の状態からヘッドライトの照射方向の補正が必要か否か判断して、前記照射方向の補正が必要な場合には、この補正を指令する前記補正信号を生成し、この補正信号を通信I/F回路12によって制御回路24に対して送信する等の機能を有する(詳細後述する)。
また、通信I/F回路12は、制御回路11と制御回路24との間で、上記補正信号を含む情報をデジタル信号として送受信するための回路である。
なお、制御回路11と通信I/F回路12は、本願発明のコントローラ側制御手段を構成する。
【0012】
駆動モータ21は、車両のヘッドライトの光軸が車体に対し上下に傾動するように前記ヘッドライトを駆動するアクチュエータである。
制御回路24は、外部から入力される補正信号(後述する位置指示値の情報を含む信号)に従って、駆動回路22を介してアクチュエータである駆動モータ21を駆動してヘッドライトの照射方向を補正する等の機能を有する(詳細後述する)。ここで、制御回路24は、位置検出器23の出力に基づいて例えば位置フィードバック制御を行い、ヘッドライトの照射方向を制御する。位置検出器23は、駆動モータ21の作動位置(即ち、ヘッドライトの照射方向)の変化に応じて抵抗値が変化する可変抵抗器(いわゆるポテンショメータ)である。制御回路24は、この位置検出器23の出力電圧から、駆動モータ21の作動位置(即ち、ヘッドライトの照射方向)の現在値を把握することができる。なお、図2では位置検出器23が駆動モータ21と電源(+B、例えば12V)に対して直列に接続されており、図1では位置検出器23が駆動モータ21とは独立に電源に対して接続されているが、どちらの構成であってもよい。
またここで、駆動回路22と制御回路24は、本願発明のアクチュエータ側制御手段を構成する。
そして、オートレベリングコントローラ10の制御回路11(コントローラ側制御手段)とレベライザ20の制御回路24(アクチュエータ側制御手段)との間で送受信される信号(前述の補正信号含む)がデジタル信号として送受信可能となるように、制御回路24には、図1に示すように、デジタル信号入力部であるデジタル入力ポートRxと、デジタル信号出力部であるデジタル出力ポートTXとが設けられている。つまり、アクチュエータ側制御手段とコントローラ側制御手段との間で双方向に複数の情報をデジタル信号で伝達出来る構成となっている。
【0013】
次に、本例のオートレベリングシステムの機能や動作について説明する。
まず、レベライザ20の制御回路24は、補正信号を新たに受信するまで、ヘッドライトの照射方向(即ち、駆動モータ21の作動位置)を、最後に照射方向が設定又は補正された状態に保持する機能を有する(但し、後述するフェール動作を実行する場合には、この限りではない)。そして制御回路24は、デジタル入力ポートRxより位置情報要求の信号を受信すると、位置検出器23の出力に基づく最新の位置情報(ヘッドライトの照射方向の情報)をデジタル出力ポートTXから送信する機能を有する。また制御回路24は、デジタル入力ポートRxより位置指示値の情報を含む補正信号を受信すると、この位置指示値に対応するヘッドライトの照射方向となるように、必要に応じて駆動モータ21を作動させてヘッドライトの照射方向(即ち、駆動モータ21の作動位置)を補正し、その後、補正後の最新の位置情報(ヘッドライトの照射方向の情報)を再度送信する機能を有する。
一方、オートレベリングコントローラ10の制御回路11は、通信I/F回路12から例えば周期的に上述の位置情報要求の信号を制御回路24に対して送信する機能を有する。そして、この位置情報要求に答えて制御回路24から送信される最新の位置情報を受信して読み取り、この位置情報(或いは、さらに図示省略した検知手段から得られる車両の荷重状態など)からヘッドライトの照射方向の補正が必要か否か判断して、前記照射方向の補正が必要な場合にはこの補正を指令する前記補正信号を生成し、この補正信号を通信I/F回路12によって制御回路24に対して送信する機能を有する。なお、補正の必要がない場合には、上記補正信号は送信されない。
【0014】
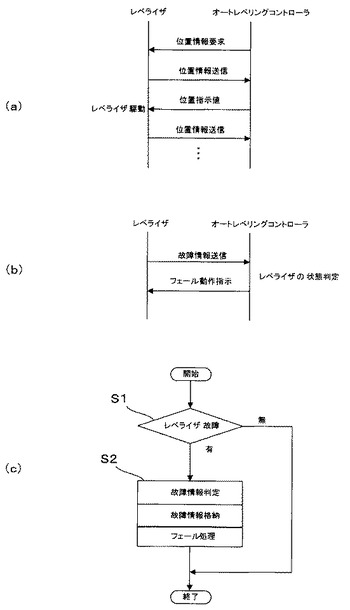
図3(a)は、以上説明した各制御回路の機能によって実現されるシステム全体の動作の流れ(オートレベリングコントローラ10とレベライザ20との間の信号のやりとり等)を説明する図である。以上説明した機能によると、オートレベリングコントローラ10から送信される位置情報要求に答えて、レベライザ20から最新の位置情報が送信され、それに対して必要に応じて位置指示値の情報を含む補正信号がオートレベリングコントローラ10から送信され、これに応じてレベライザ20が必要に応じて駆動モータ21を作動させてヘッドライトの照射方向を補正し、その後、補正後の最新の位置情報を再度送信する。なお、補正後に再度レベライザ20から送信された最新の位置情報に基づいて、オートレベリングコントローラ10(制御回路11)は、補正が適正に為されたか否か(位置情報と位置指示値が合致しているか否か)確認する。補正が適正に為されていない場合には、例えば再度上記補正信号を送信する、或いは、ユーザに対してエラーが発生したことを報知するなどの処理を実行する。
【0015】
また、レベライザ20の制御回路24は、例えば周期的に、自分の状態の情報(故障の有無や、故障があれば故障の種類などを含む故障情報に加え、ヘッドライトの照射方向の最新情報など)をデジタル出力ポートTXより送信する機能を有する。そして制御回路24は、デジタル入力ポートRxよりフェール動作指示の信号(レベライザ20が安全側に動作するように指示する信号)を受信すると、このフェール動作指示に対応するフェール動作(例えば、駆動モータ21の駆動(通電)を停止する動作)を実行する機能を有する。なお、レベライザ20の制御回路24が判定する故障としては、例えば駆動モータ21の位置サーボ制御における指令値と現在値(位置検出器23からのフィードバック値)の差である偏差が、規定範囲を超えて異常に増加した状態などがあり得る。
一方、オートレベリングコントローラ10の制御回路11は、図3(c)のフローチャートに示すように、レベライザ20からの前記故障情報などの情報を受信すると、これを読み取ってレベライザ20が故障したか否か判定し(ステップS1)、故障した場合には、故障情報を判定し、故障情報を格納(記憶)し、さらにフェール処理を行う機能を有する(ステップS2)。フェール処理は、前述したフェール動作指示の信号を通信I/F回路12によって制御回路24に対して送信する処理を含む。
【0016】
図3(b)は、以上説明した各制御回路の機能によって実現されるシステム全体の動作の流れ(オートレベリングコントローラ10とレベライザ20との間の信号のやりとり等)を説明する図である。以上説明した機能によると、レベライザ20から送信される故障情報に対して、オートレベリングコントローラ10が必要に応じてフェール動作指示の信号を送信し、これに応じてレベライザ20がフェール動作を実行する。
【0017】
以上説明したオートレベリングシステムによれば、アクチュエータ側制御手段(制御回路24)にデジタル信号入力部(デジタル入力ポートRx)を設けて、レベライザ20がデジタル信号を受けつけるようにしたことで、システム瞬断や車両配線ノイズに対して影響を受けないロバスト性の高いデジタル信号による補正信号の送受信が可能となり、ノイズに強く、かつ高精度の制御が行える。また、D/A出力回路や高精度の部品を必要としない高精度な信号の送受信が可能となる。
また、アクチュエータ側制御手段(制御回路24)にデジタル信号出力部(デジタル出力ポートTX)を設けて、アクチュエータ側制御手段(制御回路24)とコントローラ側制御手段(制御回路11)との間で双方向に情報をデジタル信号で伝達出来る構成としたから、レベライザ20からの情報出力(本例では、故障情報の出力)が可能となり、上述したフェール処理のように、システムとしての高度な制御が行えるようになり、安全性向上等が図れる。
また、アクチュエータ側制御手段(制御回路24)は、前記補正信号を新たに受信するまで、ヘッドライトの照射方向を、最後に前記照射方向が設定又は補正された状態に保持する。このため、コントローラ10が停止したとしても、ヘッドライトが不用意に動くことがなくなる。
また本例では、コントローラ側制御手段(制御回路11)がレベライザ故障時に故障情報を記憶できるため、解析時に故障情報を読み出すことで故障原因の解析をより迅速に行うことができる。
【0018】
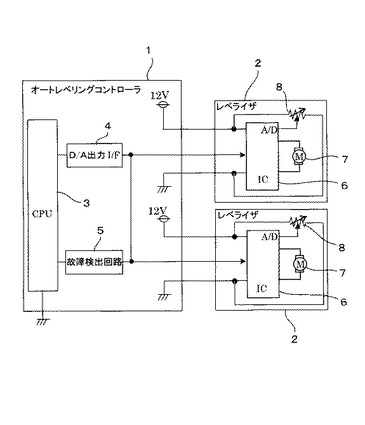
なお図6は、従来技術のようにアナログ信号を使用した場合の比較例である。この場合、オートレベリングシステムは、オートレベリングコントローラ1とレベライザ2とを備える。オートレベリングコントローラ1は、マイクロコンピュータを含む制御回路3と、D/A出力I/F回路4と、故障検出回路5とを備える。故障検出回路5は、例えばコントローラ1の故障を検出してこの故障情報をアナログ信号としてレベライザ2に送信する回路である。
一方、レベライザ2は、前記駆動モータ21(図1)と同様の駆動モータ7と、前記位置検出器23(図1)と同様の位置検出器8と、駆動モータ7を駆動制御するための制御回路6と、を備える。
制御回路3は、車両の状態からヘッドライトの照射方向の補正が必要か否か判断して、前記照射方向の補正が必要な場合には、この補正を指令する前記補正信号を生成し、この補正信号をD/A出力I/F回路4によってアナログ信号として制御回路6に対して送信する等の機能を有する。
この図6に示したオートレベリングシステムは、レベライザ2がアナログ信号の入力でのみ制御されるため、ノイズに弱い、あるいは高い精度の補正信号を送ることが難しい、といった前述の課題があった。しかし、前述した本発明を適用した形態例の構成(図1)であると、この課題が解決される。
【0019】
(第2形態例)
次に第2形態例を説明する。図4は、本例のオートレベリングシステムの全体構成を示す回路図である。図5(a)〜(c)は、同システムの機能を説明する図である。なお、前述の第1形態例(図1)や比較例(図6)と同様の構成要素には同符号を使用して重複する説明を省略する。
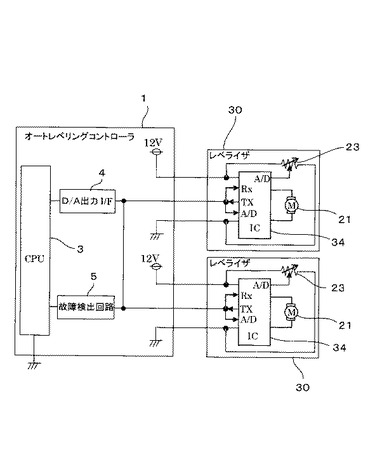
図4に示すように、本例のオートレベリングシステムは、オートレベリングコントローラ1とレベライザ30とを備える。
レベライザ30は、駆動モータ21(アクチュエータ)と、駆動モータ21を駆動するための駆動回路22と、位置検出器23と、マイクロコンピュータを含む制御回路34と、電源回路25と、電源モニタ回路26とを備える。なお図4では、駆動回路22、電源回路25及び電源モニタ回路26の図示を省略している。
【0020】
本例のレベライザ30の制御回路34は、第1形態例の制御回路24と同様に、外部から入力される補正信号(後述する位置指示値の情報を含む信号)に従って、駆動回路22を介してアクチュエータである駆動モータ21を駆動してヘッドライトの照射方向を補正する等の機能を有する。制御回路34と制御回路24の異なる点は、制御回路34が、アナログ信号入力部であるアナログ入力ポートA/Dも備えている点である。即ち本例では、従来タイプのオートレベリングコントローラ1の制御回路3からの補正信号(アナログ信号)も、アナログ入力ポートA/Dから受信できる構成のレベライザ30となっている。
なお本例のレベライザ30は、第1形態例のレベライザ20と同様に、図1に示す第1形態例のオートレベリングコントローラ10と接続して、デジタル信号として補正信号等の送受信が可能となるように、制御回路34には、図4に示すように、デジタル信号入力部であるデジタル入力ポートRxと、デジタル信号出力部であるデジタル出力ポートTXも設けられている。
ここで、駆動回路22と制御回路34は、本願発明のアクチュエータ側制御手段を構成する。
【0021】
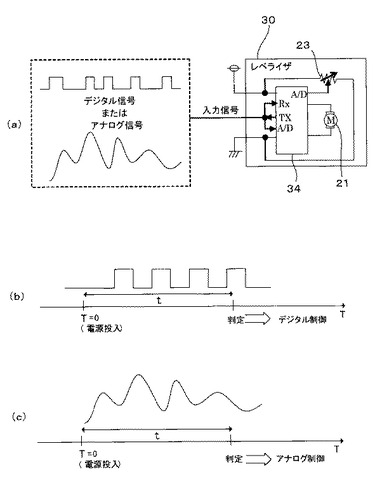
また図5(a)〜(c)に示すように、本例のレベライザ30の制御回路34は、コントローラ側制御手段から送信される信号がアナログ信号かデジタル信号かを所定時点で(例えば電源投入後所定時間経過時点で)自動的に判定し、この判定結果に基づいて有効な信号入力部をデジタル信号入力部(デジタル入力ポートRx)又はアナログ信号入力部(アナログ入力ポートA/D)の何れかに切り替える機能を有する。例えば、図5(b)、(c)に示すように、制御回路34が電源投入から予め設定された一定時間tが経過した時点でのデジタル入力ポートRxからのデジタル入力の有無を判定し、デジタル信号が入力されていればその後はデジタル制御(デジタル入力ポートRxを有効な信号入力部とした制御)によって第1形態例と同様の制御処理を行い、デジタル信号が入力されていなければその後はアナログ制御(アナログ入力ポートA/Dを有効な信号入力部とした制御)によって第1形態例と同様の制御処理を行う。つまり、上記判定結果によって制御を切り替えることでアナログ、デジタルどちらの信号を受信しても制御が可能となる構成となっている。
【0022】
以上説明したように、本第2形態例のシステムは、レベライザ30の制御回路34(アクチュエータ側制御手段)が、コントローラ側制御手段からの信号としてアナログ信号とデジタル信号のどちらでも受信可能となるように、アナログ信号入力部(アナログ入力ポートA/D)も有する。このため、第1形態例(図1)の持つ次のような課題を解決できる。即ち、第1形態例では、レベライザ20はデジタル信号に対応できるようになったが、従来のアナログ信号を使用したシステムに対応できないという課題があった。しかし、この第2形態例では従来のアナログ信号を使用したシステムにも対応できる。つまり、本第2形態例のレベライザ30であると、デジタル信号を使用するオートレベリングコントローラ10と接続して使用することもできるし、従来タイプのアナログ信号を使用するオートレベリングコントローラ1と接続して使用することもできるし、アナログ信号を使用する手動式レベリングにも対応できる。
また、本第2形態例では、レベライザ30の制御回路34(アクチュエータ側制御手段)が、コントローラ側制御手段から送信される信号がアナログ信号かデジタル信号かを所定時点で自動判定し、この判定結果に基づいて有効な信号入力部を前記デジタル信号入力部又は前記アナログ信号入力部に切り替える機能を有する。このため、次のような課題も解決できる。即ち、アナログ信号にも対応した場合、通信は同一ラインで行うため制御の切り分け(例えば、制御プログラムをアナログ信号用とデジタル信号用の二つ用意して使い分けることなど)が必要となる。しかし本第2形態例のシステムは、アナログ信号かデジタル信号かを自動判定して有効な信号入力部を切り替えるので、このような制御の切り分けが不要となる。
【0023】
なお、本発明は上述した形態例に限られず、各種の変形や応用があり得る。
例えば、前述の第1形態例(図1)では、レベライザ20の電源(12V;+B)がオートレベリングコントローラの外部から供給されているが、第2形態例(図4)のようにオートレベリングコントローラ内からこの電源が供給される態様でもよい。
【図面の簡単な説明】
【0024】
【図1】第1形態例のオートレベリングシステムの全体構成を示す回路図である。
【図2】同システムのレベライザの詳細構成を示す回路図である。
【図3】同システムの動作を説明する図であり、(a)及び(b)はシステム全体の動作の流れを説明する図、(c)はコントローラ側制御手段の処理の流れを示すフローチャートである。
【図4】第2形態例のオートレベリングシステムの全体構成を示す回路図である。
【図5】第2形態例のオートレベリングシステムの機能を説明する図である。
【図6】比較例としてのオートレベリングシステムの全体構成を示す回路図である。
【符号の説明】
【0025】
1,10 オートレベリングコントローラ
3,11 制御回路(コントローラ側制御手段)
4 D/A出力I/F回路(コントローラ側制御手段)
12 通信I/F回路(コントローラ側制御手段)
20,30 レベライザ
21 駆動モータ(アクチュエータ)
22 駆動回路(アクチュエータ側制御手段)
23 位置検出器
24,34 制御回路(アクチュエータ側制御手段)
【技術分野】
【0001】
本発明は、車両のヘッドライトの照射方向を自動補正するオートレベリングシステムに関する。
【背景技術】
【0002】
車のヘッドライトが、正しい照射方向から極端に上向き又は下向きにならないように調整・制御することを「レベリング」という。これを自動的に行うのが「オートレベリングシステム」である。
このオートレベリングシステムは、例えば特許文献1にみられるように、車両のヘッドライト(ヘッドランプともいう)の光軸が車体に対し上下に傾動するように前記ヘッドライトを駆動するアクチュエータと、車両の荷重状態などから推定される車両の傾斜状態などから前記ヘッドライトの照射方向(光軸の方向)の現状を把握し、前記照射方向の補正が必要か否か判断して、前記照射方向の補正が必要な場合には、この補正を指令する補正信号を生成して前記アクチュエータ側に対して生成した補正信号を送信するコントローラ(例えばマイクロコンピュータよりなるものであり、本願発明のオートレベリングコントローラに相当)と、を備える。
そして従来、このオートレベリングシステムは、上記コントローラから前記補正信号として電圧レベルを用いたアナログ信号をレベライザ(前記アクチュエータ側)に送り、このアナログ信号による指令に従ってレベライザを作動させることで照射方向の調整を行っていた。このようにレベライザへの信号にアナログ信号を使用していたことの背景には、レベライザを手動式レベリングと共用していたことがある。なお本明細書において、「レベライザ」とは、オートレベリングシステムの構成要素のうちで前記アクチュエータやその駆動回路を含む前記アクチュエータ側の要素を意味し、上記コントローラ(オートレベリングコントローラ)を含まない概念である。
【0003】
【特許文献1】特開2005−313763号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、従来のオートレベリングシステムは、レベライザがアナログ信号の入力でのみ制御されるため、ノイズに弱い、あるいは高い精度の補正信号を送ることが難しい、といった課題があった。即ち、電圧レベルにて補正信号を送出するため、車両の状況による外乱ノイズにより、電源電圧やグランド電位がふらつくと、アクチュエータの駆動回路が誤作動し、ランプの照射方向がふらついてしまう問題があった。このため、コントローラの信号送出部とアクチュエータの駆動回路の電源電圧やグランド電位を一致させる対策や、場合によっては、信号線にノイズをシールドする対策を施すことが必要となる。また、レベライザはアナログ信号しか受信できないため、オートレベリングコントローラには高精度の電源やD/A変換回路が必要となり、高精度の補正信号を送出することが厳しくなっている。
【0005】
また、コントローラからレベライザへの一方向の通信しかできないために、レベライザが故障したときなど、故障を把握することが困難であるという課題もあった。即ち、コントローラは電圧レベルにて信号を一方向に送信しているため、レベライザに故障があっても故障情報を検知することができない。つまり、レベライザからコントローラへ故障情報を通知することができない。また、市場の動向として車両のコントロールユニットは故障診断情報を送出する傾向にあるが、現在のアナログ信号を使用するシステムでは、その流れに追従することができない。
また、コントローラは補正信号を常に送信し続け、レベライザはそれを受信することで動作するため、補正信号の送信が止まるとレベライザはヘッドライトの照射方向を原点姿勢に戻そうとアクチュエータを作動させてしまう問題があった。即ち、例えば、コントローラがリセットした時にはレベライザが動作してしまう課題もあった。
本発明は、上記事情に鑑みてなされたものであり、少なくとも、ノイズに強く、かつ高精度の制御が行えるオートレベリングシステムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本願発明は、オートレベリングコントローラとレベライザとを備える車両のオートレベリングシステムであって、
前記レベライザは、
車両のヘッドライトの光軸が車体に対し上下に傾動するように前記ヘッドライトを駆動するアクチュエータと、外部から入力される補正信号に従って前記アクチュエータを駆動して前記ヘッドライトの照射方向を補正するアクチュエータ側制御手段と、を有し、
前記オートレベリングコントローラは、
車両の状態から前記照射方向の補正が必要か否か判断して、前記照射方向の補正が必要な場合にはこの補正を指令する前記補正信号を生成し、この補正信号を前記アクチュエータ側制御手段に対して送信するコントローラ側制御手段を有し、
前記コントローラ側制御手段と前記アクチュエータ側制御手段との間で送受信される信号がデジタル信号として送受信可能となるように、前記アクチュエータ側制御手段にはデジタル信号入力部が設けられていることを特徴とするオートレベリングシステム。
本願発明によれば、アクチュエータ側制御手段にデジタル信号入力部を設けて、レベライザがデジタル信号を受けつけるようにしたことで、システム瞬断や車両配線ノイズに対して影響を受けないロバスト性の高いデジタル信号による補正信号の送受信が可能となり、ノイズに強く、かつ高精度の制御が行える。また、D/A出力回路や高精度の部品を必要としない高精度な信号の送受信が可能となる。
【0007】
次に、本願発明の好ましい態様は、前記アクチュエータ側制御手段は、前記補正信号を新たに受信するまで、前記照射方向を、最後に前記照射方向が設定又は補正された状態に保持することを特徴とする。
この態様であると、オートレベリングコントローラが停止したとしても、ヘッドライトが不用意に動くことがなくなる。
また、本願発明の別の好ましい態様は、前記アクチュエータ側制御手段と前記コントローラ側制御手段との間で双方向に情報を伝達出来るように、前記アクチュエータ側制御手段にはデジタル信号出力部も設けられていることを特徴とする。
この態様であると、レベライザからの情報出力(例えば、故障情報の出力)が可能となり、システムとしての高度な制御(例えば、後述するフェール処理)が行えるようになり、安全性向上等が図れる。
【0008】
また、本願発明の別の好ましい態様は、前記アクチュエータ側制御手段は、前記コントローラ側制御手段からの信号としてアナログ信号とデジタル信号のどちらでも受信可能となるように、アナログ信号入力部も有することを特徴とする。
この態様であると、従来のアナログ信号を使用したシステムにも対応できる。
また、本願発明の別の好ましい態様は、前記アクチュエータ側制御手段は、前記コントローラ側制御手段から送信される信号がアナログ信号かデジタル信号かを所定時点で(例えば電源投入時に)判定し、この判定結果に基づいて有効な信号入力部を前記デジタル信号入力部又は前記アナログ信号入力部の何れかに切り替える機能を有することを特徴とする。
この態様であると、レベライザがアナログ信号かデジタル信号かを自動判定して有効な信号入力部を切り替えるので、制御の切り分けが不要となる。
【発明の効果】
【0009】
本願発明によれば、アクチュエータ側制御手段にデジタル信号入力部を設けて、レベライザがデジタル信号を受けつけるようにしたことで、システム瞬断や車両配線ノイズに対して影響を受けないロバスト性の高いデジタル信号による補正信号の送受信が可能となり、ノイズに強く、かつ高精度の制御が行える。また、D/A出力回路や高精度の部品を必要としない高精度な信号の送受信が可能となる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の実施の形態の各例を図面に基づいて説明する。
(第1形態例)
まず第1形態例を説明する。図1は、本例のオートレベリングシステムの全体構成を示す回路図である。図2は、同システムを構成するレベライザの詳細構成を示す回路図である。
図1に示すように、本例のオートレベリングシステムは、オートレベリングコントローラ10とレベライザ20とを備える。オートレベリングコントローラ10は、レベライザ20とは別のユニットとして一台の車両に対して一つ設けられている。レベライザ20は、車両の左右のヘッドライトに対してそれぞれ一つ設けられ、一台の車両に対して合計二つ設けられている。二つのレベライザ20は、同じ構成である。なお、ヘッドライトが一つの車両(バイクなど)の場合には、レベライザ20は当然1個になるし、仮にヘッドライトが三つ以上ある車両の場合には、レベライザ20の数はそれに対応して3個以上になってもよい。
【0011】
オートレベリングコントローラ10は、マイクロコンピュータを含む制御回路11と、通信I/F回路12とを備える。
一方、レベライザ20は、図2に示すように、駆動モータ21(アクチュエータ)と、駆動モータ21を駆動するための駆動回路22と、位置検出器23と、マイクロコンピュータを含む制御回路24と、電源回路25と、電源モニタ回路26とを備える。なお図1では、駆動回路22、電源回路25及び電源モニタ回路26の図示を省略している。
制御回路11は、車両の状態からヘッドライトの照射方向の補正が必要か否か判断して、前記照射方向の補正が必要な場合には、この補正を指令する前記補正信号を生成し、この補正信号を通信I/F回路12によって制御回路24に対して送信する等の機能を有する(詳細後述する)。
また、通信I/F回路12は、制御回路11と制御回路24との間で、上記補正信号を含む情報をデジタル信号として送受信するための回路である。
なお、制御回路11と通信I/F回路12は、本願発明のコントローラ側制御手段を構成する。
【0012】
駆動モータ21は、車両のヘッドライトの光軸が車体に対し上下に傾動するように前記ヘッドライトを駆動するアクチュエータである。
制御回路24は、外部から入力される補正信号(後述する位置指示値の情報を含む信号)に従って、駆動回路22を介してアクチュエータである駆動モータ21を駆動してヘッドライトの照射方向を補正する等の機能を有する(詳細後述する)。ここで、制御回路24は、位置検出器23の出力に基づいて例えば位置フィードバック制御を行い、ヘッドライトの照射方向を制御する。位置検出器23は、駆動モータ21の作動位置(即ち、ヘッドライトの照射方向)の変化に応じて抵抗値が変化する可変抵抗器(いわゆるポテンショメータ)である。制御回路24は、この位置検出器23の出力電圧から、駆動モータ21の作動位置(即ち、ヘッドライトの照射方向)の現在値を把握することができる。なお、図2では位置検出器23が駆動モータ21と電源(+B、例えば12V)に対して直列に接続されており、図1では位置検出器23が駆動モータ21とは独立に電源に対して接続されているが、どちらの構成であってもよい。
またここで、駆動回路22と制御回路24は、本願発明のアクチュエータ側制御手段を構成する。
そして、オートレベリングコントローラ10の制御回路11(コントローラ側制御手段)とレベライザ20の制御回路24(アクチュエータ側制御手段)との間で送受信される信号(前述の補正信号含む)がデジタル信号として送受信可能となるように、制御回路24には、図1に示すように、デジタル信号入力部であるデジタル入力ポートRxと、デジタル信号出力部であるデジタル出力ポートTXとが設けられている。つまり、アクチュエータ側制御手段とコントローラ側制御手段との間で双方向に複数の情報をデジタル信号で伝達出来る構成となっている。
【0013】
次に、本例のオートレベリングシステムの機能や動作について説明する。
まず、レベライザ20の制御回路24は、補正信号を新たに受信するまで、ヘッドライトの照射方向(即ち、駆動モータ21の作動位置)を、最後に照射方向が設定又は補正された状態に保持する機能を有する(但し、後述するフェール動作を実行する場合には、この限りではない)。そして制御回路24は、デジタル入力ポートRxより位置情報要求の信号を受信すると、位置検出器23の出力に基づく最新の位置情報(ヘッドライトの照射方向の情報)をデジタル出力ポートTXから送信する機能を有する。また制御回路24は、デジタル入力ポートRxより位置指示値の情報を含む補正信号を受信すると、この位置指示値に対応するヘッドライトの照射方向となるように、必要に応じて駆動モータ21を作動させてヘッドライトの照射方向(即ち、駆動モータ21の作動位置)を補正し、その後、補正後の最新の位置情報(ヘッドライトの照射方向の情報)を再度送信する機能を有する。
一方、オートレベリングコントローラ10の制御回路11は、通信I/F回路12から例えば周期的に上述の位置情報要求の信号を制御回路24に対して送信する機能を有する。そして、この位置情報要求に答えて制御回路24から送信される最新の位置情報を受信して読み取り、この位置情報(或いは、さらに図示省略した検知手段から得られる車両の荷重状態など)からヘッドライトの照射方向の補正が必要か否か判断して、前記照射方向の補正が必要な場合にはこの補正を指令する前記補正信号を生成し、この補正信号を通信I/F回路12によって制御回路24に対して送信する機能を有する。なお、補正の必要がない場合には、上記補正信号は送信されない。
【0014】
図3(a)は、以上説明した各制御回路の機能によって実現されるシステム全体の動作の流れ(オートレベリングコントローラ10とレベライザ20との間の信号のやりとり等)を説明する図である。以上説明した機能によると、オートレベリングコントローラ10から送信される位置情報要求に答えて、レベライザ20から最新の位置情報が送信され、それに対して必要に応じて位置指示値の情報を含む補正信号がオートレベリングコントローラ10から送信され、これに応じてレベライザ20が必要に応じて駆動モータ21を作動させてヘッドライトの照射方向を補正し、その後、補正後の最新の位置情報を再度送信する。なお、補正後に再度レベライザ20から送信された最新の位置情報に基づいて、オートレベリングコントローラ10(制御回路11)は、補正が適正に為されたか否か(位置情報と位置指示値が合致しているか否か)確認する。補正が適正に為されていない場合には、例えば再度上記補正信号を送信する、或いは、ユーザに対してエラーが発生したことを報知するなどの処理を実行する。
【0015】
また、レベライザ20の制御回路24は、例えば周期的に、自分の状態の情報(故障の有無や、故障があれば故障の種類などを含む故障情報に加え、ヘッドライトの照射方向の最新情報など)をデジタル出力ポートTXより送信する機能を有する。そして制御回路24は、デジタル入力ポートRxよりフェール動作指示の信号(レベライザ20が安全側に動作するように指示する信号)を受信すると、このフェール動作指示に対応するフェール動作(例えば、駆動モータ21の駆動(通電)を停止する動作)を実行する機能を有する。なお、レベライザ20の制御回路24が判定する故障としては、例えば駆動モータ21の位置サーボ制御における指令値と現在値(位置検出器23からのフィードバック値)の差である偏差が、規定範囲を超えて異常に増加した状態などがあり得る。
一方、オートレベリングコントローラ10の制御回路11は、図3(c)のフローチャートに示すように、レベライザ20からの前記故障情報などの情報を受信すると、これを読み取ってレベライザ20が故障したか否か判定し(ステップS1)、故障した場合には、故障情報を判定し、故障情報を格納(記憶)し、さらにフェール処理を行う機能を有する(ステップS2)。フェール処理は、前述したフェール動作指示の信号を通信I/F回路12によって制御回路24に対して送信する処理を含む。
【0016】
図3(b)は、以上説明した各制御回路の機能によって実現されるシステム全体の動作の流れ(オートレベリングコントローラ10とレベライザ20との間の信号のやりとり等)を説明する図である。以上説明した機能によると、レベライザ20から送信される故障情報に対して、オートレベリングコントローラ10が必要に応じてフェール動作指示の信号を送信し、これに応じてレベライザ20がフェール動作を実行する。
【0017】
以上説明したオートレベリングシステムによれば、アクチュエータ側制御手段(制御回路24)にデジタル信号入力部(デジタル入力ポートRx)を設けて、レベライザ20がデジタル信号を受けつけるようにしたことで、システム瞬断や車両配線ノイズに対して影響を受けないロバスト性の高いデジタル信号による補正信号の送受信が可能となり、ノイズに強く、かつ高精度の制御が行える。また、D/A出力回路や高精度の部品を必要としない高精度な信号の送受信が可能となる。
また、アクチュエータ側制御手段(制御回路24)にデジタル信号出力部(デジタル出力ポートTX)を設けて、アクチュエータ側制御手段(制御回路24)とコントローラ側制御手段(制御回路11)との間で双方向に情報をデジタル信号で伝達出来る構成としたから、レベライザ20からの情報出力(本例では、故障情報の出力)が可能となり、上述したフェール処理のように、システムとしての高度な制御が行えるようになり、安全性向上等が図れる。
また、アクチュエータ側制御手段(制御回路24)は、前記補正信号を新たに受信するまで、ヘッドライトの照射方向を、最後に前記照射方向が設定又は補正された状態に保持する。このため、コントローラ10が停止したとしても、ヘッドライトが不用意に動くことがなくなる。
また本例では、コントローラ側制御手段(制御回路11)がレベライザ故障時に故障情報を記憶できるため、解析時に故障情報を読み出すことで故障原因の解析をより迅速に行うことができる。
【0018】
なお図6は、従来技術のようにアナログ信号を使用した場合の比較例である。この場合、オートレベリングシステムは、オートレベリングコントローラ1とレベライザ2とを備える。オートレベリングコントローラ1は、マイクロコンピュータを含む制御回路3と、D/A出力I/F回路4と、故障検出回路5とを備える。故障検出回路5は、例えばコントローラ1の故障を検出してこの故障情報をアナログ信号としてレベライザ2に送信する回路である。
一方、レベライザ2は、前記駆動モータ21(図1)と同様の駆動モータ7と、前記位置検出器23(図1)と同様の位置検出器8と、駆動モータ7を駆動制御するための制御回路6と、を備える。
制御回路3は、車両の状態からヘッドライトの照射方向の補正が必要か否か判断して、前記照射方向の補正が必要な場合には、この補正を指令する前記補正信号を生成し、この補正信号をD/A出力I/F回路4によってアナログ信号として制御回路6に対して送信する等の機能を有する。
この図6に示したオートレベリングシステムは、レベライザ2がアナログ信号の入力でのみ制御されるため、ノイズに弱い、あるいは高い精度の補正信号を送ることが難しい、といった前述の課題があった。しかし、前述した本発明を適用した形態例の構成(図1)であると、この課題が解決される。
【0019】
(第2形態例)
次に第2形態例を説明する。図4は、本例のオートレベリングシステムの全体構成を示す回路図である。図5(a)〜(c)は、同システムの機能を説明する図である。なお、前述の第1形態例(図1)や比較例(図6)と同様の構成要素には同符号を使用して重複する説明を省略する。
図4に示すように、本例のオートレベリングシステムは、オートレベリングコントローラ1とレベライザ30とを備える。
レベライザ30は、駆動モータ21(アクチュエータ)と、駆動モータ21を駆動するための駆動回路22と、位置検出器23と、マイクロコンピュータを含む制御回路34と、電源回路25と、電源モニタ回路26とを備える。なお図4では、駆動回路22、電源回路25及び電源モニタ回路26の図示を省略している。
【0020】
本例のレベライザ30の制御回路34は、第1形態例の制御回路24と同様に、外部から入力される補正信号(後述する位置指示値の情報を含む信号)に従って、駆動回路22を介してアクチュエータである駆動モータ21を駆動してヘッドライトの照射方向を補正する等の機能を有する。制御回路34と制御回路24の異なる点は、制御回路34が、アナログ信号入力部であるアナログ入力ポートA/Dも備えている点である。即ち本例では、従来タイプのオートレベリングコントローラ1の制御回路3からの補正信号(アナログ信号)も、アナログ入力ポートA/Dから受信できる構成のレベライザ30となっている。
なお本例のレベライザ30は、第1形態例のレベライザ20と同様に、図1に示す第1形態例のオートレベリングコントローラ10と接続して、デジタル信号として補正信号等の送受信が可能となるように、制御回路34には、図4に示すように、デジタル信号入力部であるデジタル入力ポートRxと、デジタル信号出力部であるデジタル出力ポートTXも設けられている。
ここで、駆動回路22と制御回路34は、本願発明のアクチュエータ側制御手段を構成する。
【0021】
また図5(a)〜(c)に示すように、本例のレベライザ30の制御回路34は、コントローラ側制御手段から送信される信号がアナログ信号かデジタル信号かを所定時点で(例えば電源投入後所定時間経過時点で)自動的に判定し、この判定結果に基づいて有効な信号入力部をデジタル信号入力部(デジタル入力ポートRx)又はアナログ信号入力部(アナログ入力ポートA/D)の何れかに切り替える機能を有する。例えば、図5(b)、(c)に示すように、制御回路34が電源投入から予め設定された一定時間tが経過した時点でのデジタル入力ポートRxからのデジタル入力の有無を判定し、デジタル信号が入力されていればその後はデジタル制御(デジタル入力ポートRxを有効な信号入力部とした制御)によって第1形態例と同様の制御処理を行い、デジタル信号が入力されていなければその後はアナログ制御(アナログ入力ポートA/Dを有効な信号入力部とした制御)によって第1形態例と同様の制御処理を行う。つまり、上記判定結果によって制御を切り替えることでアナログ、デジタルどちらの信号を受信しても制御が可能となる構成となっている。
【0022】
以上説明したように、本第2形態例のシステムは、レベライザ30の制御回路34(アクチュエータ側制御手段)が、コントローラ側制御手段からの信号としてアナログ信号とデジタル信号のどちらでも受信可能となるように、アナログ信号入力部(アナログ入力ポートA/D)も有する。このため、第1形態例(図1)の持つ次のような課題を解決できる。即ち、第1形態例では、レベライザ20はデジタル信号に対応できるようになったが、従来のアナログ信号を使用したシステムに対応できないという課題があった。しかし、この第2形態例では従来のアナログ信号を使用したシステムにも対応できる。つまり、本第2形態例のレベライザ30であると、デジタル信号を使用するオートレベリングコントローラ10と接続して使用することもできるし、従来タイプのアナログ信号を使用するオートレベリングコントローラ1と接続して使用することもできるし、アナログ信号を使用する手動式レベリングにも対応できる。
また、本第2形態例では、レベライザ30の制御回路34(アクチュエータ側制御手段)が、コントローラ側制御手段から送信される信号がアナログ信号かデジタル信号かを所定時点で自動判定し、この判定結果に基づいて有効な信号入力部を前記デジタル信号入力部又は前記アナログ信号入力部に切り替える機能を有する。このため、次のような課題も解決できる。即ち、アナログ信号にも対応した場合、通信は同一ラインで行うため制御の切り分け(例えば、制御プログラムをアナログ信号用とデジタル信号用の二つ用意して使い分けることなど)が必要となる。しかし本第2形態例のシステムは、アナログ信号かデジタル信号かを自動判定して有効な信号入力部を切り替えるので、このような制御の切り分けが不要となる。
【0023】
なお、本発明は上述した形態例に限られず、各種の変形や応用があり得る。
例えば、前述の第1形態例(図1)では、レベライザ20の電源(12V;+B)がオートレベリングコントローラの外部から供給されているが、第2形態例(図4)のようにオートレベリングコントローラ内からこの電源が供給される態様でもよい。
【図面の簡単な説明】
【0024】
【図1】第1形態例のオートレベリングシステムの全体構成を示す回路図である。
【図2】同システムのレベライザの詳細構成を示す回路図である。
【図3】同システムの動作を説明する図であり、(a)及び(b)はシステム全体の動作の流れを説明する図、(c)はコントローラ側制御手段の処理の流れを示すフローチャートである。
【図4】第2形態例のオートレベリングシステムの全体構成を示す回路図である。
【図5】第2形態例のオートレベリングシステムの機能を説明する図である。
【図6】比較例としてのオートレベリングシステムの全体構成を示す回路図である。
【符号の説明】
【0025】
1,10 オートレベリングコントローラ
3,11 制御回路(コントローラ側制御手段)
4 D/A出力I/F回路(コントローラ側制御手段)
12 通信I/F回路(コントローラ側制御手段)
20,30 レベライザ
21 駆動モータ(アクチュエータ)
22 駆動回路(アクチュエータ側制御手段)
23 位置検出器
24,34 制御回路(アクチュエータ側制御手段)
【特許請求の範囲】
【請求項1】
オートレベリングコントローラとレベライザとを備える車両のオートレベリングシステムであって、
前記レベライザは、
車両のヘッドライトの光軸が車体に対し上下に傾動するように前記ヘッドライトを駆動するアクチュエータと、外部から入力される補正信号に従って前記アクチュエータを駆動して前記ヘッドライトの照射方向を補正するアクチュエータ側制御手段と、を有し、
前記オートレベリングコントローラは、
車両の状態から前記照射方向の補正が必要か否か判断して、前記照射方向の補正が必要な場合にはこの補正を指令する前記補正信号を生成し、この補正信号を前記アクチュエータ側制御手段に対して送信するコントローラ側制御手段を有し、
前記コントローラ側制御手段と前記アクチュエータ側制御手段との間で送受信される信号がデジタル信号として送受信可能となるように、前記アクチュエータ側制御手段にはデジタル信号入力部が設けられていることを特徴とするオートレベリングシステム。
【請求項2】
前記アクチュエータ側制御手段は、前記補正信号を新たに受信するまで、前記照射方向を、最後に前記照射方向が設定又は補正された状態に保持することを特徴とする請求項1に記載のオートレベリングシステム。
【請求項3】
前記アクチュエータ側制御手段と前記コントローラ側制御手段との間で双方向に情報を伝達出来るように、前記アクチュエータ側制御手段にはデジタル信号出力部も設けられていることを特徴とする請求項1又は2に記載のオートレベリングシステム。
【請求項4】
前記アクチュエータ側制御手段は、前記コントローラ側制御手段からの信号としてアナログ信号とデジタル信号のどちらでも受信可能となるように、アナログ信号入力部も有することを特徴とする請求項1乃至3の何れかに記載のオートレベリングシステム。
【請求項5】
前記アクチュエータ側制御手段は、前記コントローラ側制御手段から送信される信号がアナログ信号かデジタル信号かを所定時点で判定し、この判定結果に基づいて有効な信号入力部を前記デジタル信号入力部又は前記アナログ信号入力部の何れかに切り替える機能を有することを特徴とする請求項4に記載のオートレベリングシステム。
【請求項1】
オートレベリングコントローラとレベライザとを備える車両のオートレベリングシステムであって、
前記レベライザは、
車両のヘッドライトの光軸が車体に対し上下に傾動するように前記ヘッドライトを駆動するアクチュエータと、外部から入力される補正信号に従って前記アクチュエータを駆動して前記ヘッドライトの照射方向を補正するアクチュエータ側制御手段と、を有し、
前記オートレベリングコントローラは、
車両の状態から前記照射方向の補正が必要か否か判断して、前記照射方向の補正が必要な場合にはこの補正を指令する前記補正信号を生成し、この補正信号を前記アクチュエータ側制御手段に対して送信するコントローラ側制御手段を有し、
前記コントローラ側制御手段と前記アクチュエータ側制御手段との間で送受信される信号がデジタル信号として送受信可能となるように、前記アクチュエータ側制御手段にはデジタル信号入力部が設けられていることを特徴とするオートレベリングシステム。
【請求項2】
前記アクチュエータ側制御手段は、前記補正信号を新たに受信するまで、前記照射方向を、最後に前記照射方向が設定又は補正された状態に保持することを特徴とする請求項1に記載のオートレベリングシステム。
【請求項3】
前記アクチュエータ側制御手段と前記コントローラ側制御手段との間で双方向に情報を伝達出来るように、前記アクチュエータ側制御手段にはデジタル信号出力部も設けられていることを特徴とする請求項1又は2に記載のオートレベリングシステム。
【請求項4】
前記アクチュエータ側制御手段は、前記コントローラ側制御手段からの信号としてアナログ信号とデジタル信号のどちらでも受信可能となるように、アナログ信号入力部も有することを特徴とする請求項1乃至3の何れかに記載のオートレベリングシステム。
【請求項5】
前記アクチュエータ側制御手段は、前記コントローラ側制御手段から送信される信号がアナログ信号かデジタル信号かを所定時点で判定し、この判定結果に基づいて有効な信号入力部を前記デジタル信号入力部又は前記アナログ信号入力部の何れかに切り替える機能を有することを特徴とする請求項4に記載のオートレベリングシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−58670(P2010−58670A)
【公開日】平成22年3月18日(2010.3.18)
【国際特許分類】
【出願番号】特願2008−226577(P2008−226577)
【出願日】平成20年9月4日(2008.9.4)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
【公開日】平成22年3月18日(2010.3.18)
【国際特許分類】
【出願日】平成20年9月4日(2008.9.4)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
[ Back to top ]