
カプセル型医療装置
【課題】 カプセル型体内装置の位置が複数推定された場合においても信頼性の高い軌跡及び位置を算出できるカプセル型医療装置を提供する。
【解決手段】 体内を移動するカプセル型内視鏡3に内蔵されたアンテナの位置を複数のアンテナを用いて推定し、隣接する時刻で推定された2つの位置Pti、P(t-1)jの距離dijが所定値以内の場合にはそれらの位置情報を関連付けてメモリに接続情報として記憶する。その後、メモリに記憶された接続情報から経路探索を行い、軌跡を算出する処理を行う。
【解決手段】 体内を移動するカプセル型内視鏡3に内蔵されたアンテナの位置を複数のアンテナを用いて推定し、隣接する時刻で推定された2つの位置Pti、P(t-1)jの距離dijが所定値以内の場合にはそれらの位置情報を関連付けてメモリに接続情報として記憶する。その後、メモリに記憶された接続情報から経路探索を行い、軌跡を算出する処理を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、生体内に挿入され、撮像等を行うカプセル型医療装置に関する。
【背景技術】
【0002】
挿入部を体腔内に挿入することにより、体腔内を診断或いは必要に応じて処置を行うことができる内視鏡は、医療用分野その他で広く普及している。
また、最近においては、口から飲み込むことにより、体腔内を撮像して内視鏡検査を行うことができるカプセル形状にしたカプセル型体内装置(カプセルと略記)を備えたカプセル型医療装置も実用化される状況になっている。
カプセルは、体腔内に挿入された場合には、通常は蠕動運動などにより体腔内を移動するため、カプセルにより得られる情報が、体腔内のどの位置に相当するものであるかを知ることが望ましい場合がある。
このため、例えば第1の従来例として特表2003−524448号公報においては、体腔内のカプセルからアンテナを介して無線送信した信号を体外に配置した複数のアンテナで受信して、その受信信号の強度等によりカプセルの位置を算出するものを開示している。
また、第2の従来例としての特開2005−198789号公報には、体腔内のカプセルのアンテナを介して無線送信した信号を体外に配置した複数のアンテナで受信して、その受信信号の強度等によりカプセルの位置及び向きを算出するものを開示している。
【特許文献1】特表2003−524448号公報
【特許文献2】特開2005−198789号公報
【非特許文献1】データ構造とアルゴリズム コロナ社(株) 斎藤、西原 共著p124−p129
【発明の開示】
【発明が解決しようとする課題】
【0003】
カプセルの位置を推定する場合において、ノイズ等のために複数の位置を推定してしまう可能性がある。このように、カプセルの位置が複数推定或いは検出されたような場合、上記第1及び第2の従来例では、適切に軌跡を算出する手段或いは方法を開示していない。
このように複数の位置が推定されたような場合には、カプセル内のアンテナの各時刻での位置が定まらないと、カプセルの移動の軌跡も定めにくくなり、カプセルにより得られる体内の情報等の利用価値が低くなってしまう。
【0004】
(発明の目的)
本発明は上述した点に鑑みてなされたもので、カプセル型体内装置の位置が複数推定された場合においても信頼性の高い軌跡及び位置を算出できるカプセル型医療装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明のカプセル型医療装置は、生体内に挿入され、アンテナを備えたカプセル型体内装置と、
前記カプセル型体内装置のアンテナから電磁波の信号を無線で送信する無線送信手段と、
前記生体外に配置される複数の体外アンテナと、
前記複数の体外アンテナによって受信した時刻における前記電磁波の信号から前記アンテナ若しくはカプセル型体内装置の位置を推定する推定手段と、
前記推定手段により推定された互いに異なる時刻の位置のものが複数推定された場合に対して設定される条件に従って前記カプセル型体内装置の移動した軌跡を算出する軌跡算出手段と、
を具備したことを特徴とする。
上記構成により、カプセル型体内装置に内蔵されたアンテナ若しくはカプセル型体内装置の位置を推定手段により推定し、異なる時刻で推定された位置に対して、設定される条件に従ってその条件を満たすものを用いて、軌跡を算出することにより、複数の位置が推定された場合にも信頼性が高い軌跡及び位置を算出できるようにしている。
【発明の効果】
【0006】
本発明によれば、複数の位置が推定された場合にも信頼性の高い軌跡及び位置を算出できる。
【発明を実施するための最良の形態】
【0007】
以下、図面を参照して本発明の実施例を説明する。
【実施例1】
【0008】
図1ないし図12は本発明の実施例1に係り、図1は本発明の実施例1のカプセル型内視鏡装置等の構成を示し、図2はカプセル型内視鏡の内部構成を示し、図3はアンテナユニットを構成する複数のアンテナの配置例とそのアンテナに設定した座標系を示し、図4はカプセル型内視鏡と体外装置における送受信する電気系の構成を示す。
また、図5はカプセル型内視鏡から無線で送信する画像信号等を示し、図6はカプセル型内視鏡の円形コイルによるアンテナから任意の位置における電磁界の成分などを示し、図7は図6のアンテナが発生した電界を受信するアンテナユニットを構成する棒状のアンテナの向きDaとの関係を示す。
【0009】
また、図8は経時的に隣接する時刻で推定された複数の位置を示し、図9は隣接する時刻で推定された位置が予め設定された値の半径rdの球内にあるか否かの様子を示し、図10は隣接する時刻で推定された位置により軌跡の候補となる接続関係を決定する処理内容を示し、図11は図10の処理後に軌跡を算出する処理内容を示し、図12はカプセル型内視鏡により撮像された画像を、算出された軌跡を形成する位置と共に表示した表示例を示す。
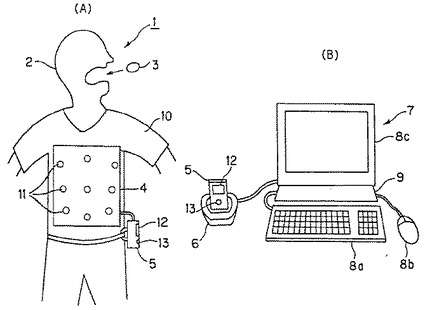
図1(A)に示すように本発明の実施例1のカプセル型内視鏡装置1は、患者2が口から飲み込むことにより体腔内に挿入されるカプセル型体内装置として、例えば体腔内を撮像するカプセル型内視鏡3と、この患者2の体外に配置され、カプセル型内視鏡3で撮像した画像情報を無線で受信するアンテナユニット4に接続される体外装置(或いは外部装置)5とを備えている。
図1(B)に示すようにこの体外装置5はクレードル6に装着することにより、パーソナルコンピュータ等により構成される端末装置7に電気的に接続され、端末装置7は体外装置5に蓄積した画像をキーボード8aやマウス8b等の入力・操作デバイスの操作によりこの端末装置7内に取り込み、取り込んだ画像をモニタ部8cで表示すること等ができる。
図1(A)に示すようにカプセル型内視鏡3を飲み込んで内視鏡検査を行う場合に使用される患者2が着るジャケット10には、複数のアンテナ11が取り付けられたアンテナユニット4が設けてある。
【0010】
カプセル型内視鏡3により撮像され、それに内蔵されたアンテナ23(図2参照)から送信された信号は、アンテナユニット4の複数のアンテナ11で受信され、このアンテナユニット4に接続された体外装置5に撮像した画像を保存することができるようにしている。
また、この体外装置5は、例えば箱形状であり、その前面には画像表示を行う液晶モニタ12と、指示操作等を行う操作部13とが設けてある。
なお、体外装置5には、バッテリ残量に関する警告表示用のLEDや操作部13としての電源スイッチなどのみを設ける構成としてもよい。また、第2の体外装置として、カプセル型内視鏡3から送信される画像信号を処理し、備え付けの液晶モニタ画像表示させるような図示しない携帯型の表示装置(ビュワー) が接続されるようにしても良い。
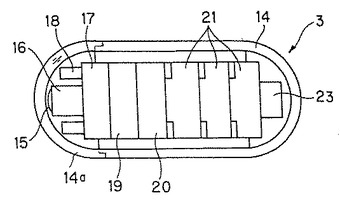
図2に示すようにカプセル型内視鏡3は、円筒の後端側を閉塞した形状を有する外装部材14と、この円筒の先端側に接着剤によって接続されて閉塞する略半球形状に丸みを付けたドーム型カバー14aにて、全体としてカプセル形状で水密構造となっている。
この透明なドーム型カバー14a内で、円筒の中央付近には、ドーム型カバー14aを介して入射された像を結像する対物レンズ15がレンズ枠16に取り付けられて配置され、その結像位置には撮像素子としてここではCCDイメージャ17が配置されている。
【0011】
また、対物レンズ15の周囲には、照明系として、ここでは白色LED18が4つ、同一平面上に配置されている。また、例えばCCDイメージャ17の裏面側には、白色LED18を発光駆動させると共に、CCDイメージャ17を駆動してCCDイメージャ17から入力される撮像信号から画像信号を生成する信号処理を行う処理回路19、画像信号を送信すると共に、体外装置5からの信号を受信する機能を持つ送受信回路20、これらの回路19、20に電源を供給するボタン型電池21が外装部材14の内部に配置されている。
また、ボタン型電池21の後端側、つまり他方の半球形状内側には送受信回路20と接続され、電波を送受信する円形コイル(円形のループコイル)状のアンテナ23が配置されている。なお、CCDイメージャ17、白色LED18や各回路は、図示しない基板上に設けられ、各基板はフレキシブル基板にて接続されている。
【0012】
カプセル型内視鏡3の処理回路19は、CCDイメージャ17の撮像のタイミングを制御する制御信号を発生し、通常の撮像では1秒間に2フレームの画像を撮像し、食道のようにカプセル型内視鏡3が比較的高速に移動するような部位では例えば15から30フレームの画像を撮像する。
また、アンテナ23は、体外装置5から送られてく信号を受信し、受信した信号は送受信回路20により処理され、処理回路19に送られる。処理回路19は送られてきた信号によってCCDイメージャ17の撮像のタイミングや白色LED18の点灯のON/OFF等を制御する。カプセル型内視鏡3の処理回路19に磁石等の磁性体を近づけるとカプセル型内視鏡3内の電源がON/OFF可能な回路を組み込み、患者がカプセル型内視鏡3を飲み込む前にカプセル型内視鏡3の電源を入れて画像を撮影しても良い。
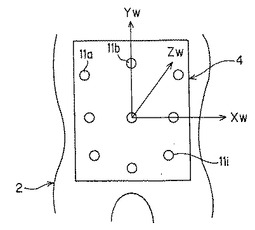
図1(A)に示した患者2が着るジャケット10に取り付けたアンテナユニット4は、拡大して示すと、図3に示すようにアンテナ11a、11b、…、11iによって構成される。
【0013】
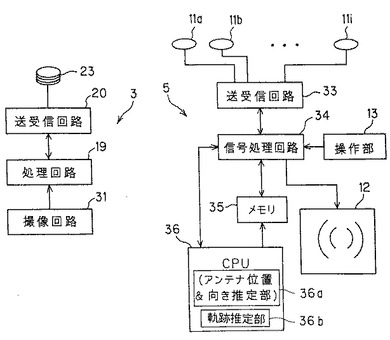
カプセル型内視鏡3及び体外装置5における送受信する部分の構成は、図4に示すようになる。 図4に示すようにカプセル型内視鏡3は、(白色LED18及びCCDイメージャ17からなる)撮像回路31により撮像され、処理回路19により処理された信号は、送受信回路20を経て高周波で変調され、円形のループコイルからなるアンテナ23から電波で送信される。
このアンテナ23から送信される信号は、体外のアンテナユニット4を構成する複数のアンテナ11a、11b、…、11iにより受信される。そして、複数のアンテナ11a、11b、…、11iに接続された送受信回路33により復調され、信号処理回路34に入力される。この信号処理回路34により画像信号に変換されて液晶モニタ12で表示されると共に、画像データ等がメモリ35に格納される。
また、メモリ35に格納された画像データは、ユーザによる操作部13からの指示操作により液晶モニタ12に送ることができ、その表示面に過去の画像を表示させることもできる。
【0014】
また、本実施例においては、体外装置5には、例えばCPU36を用いて構成されるアンテナ位置&向き推定部36aが設けてあり、このアンテナ位置&向き推定部36aは、カプセル型内視鏡3に内蔵されたアンテナ23の位置及び向きを推定する推定処理を行いその位置及び向きを算出する。
後述するようにこの推定処理は、初期状態では適宜に位置及び向きを設定して、それらに対してGauss−Newton法で位置及び向きの推定処理を反復して行う。その際、推定処理により、推定前の値とのずれ量が小さい値以下となるまで反復推定する。
換言すると、推定処理を行う推定手段と、その推定手段により推定された推定値(具体的には位置及び向き)が推定前の値と比較してその差分値が所定値以下となるように推定値を更新補正する更新補正手段とを備えている。
【0015】
また、体外装置5に設けられた操作部13を操作して、撮像周期を変更させる等の指示信号を信号処理回路34に入力すると、この信号処理回路34は、送受信回路33に指示信号を送り、送受信回路33は指示信号を変調してアンテナ11a、11b、…、11iから送信する。
アンテナ11a、11b、…、11iから送信された信号は、アンテナ23により受信され、送受信回路20により復調され、送受信回路20は、指示信号に対応して、例えば撮像周期を変更する動作等を行う。
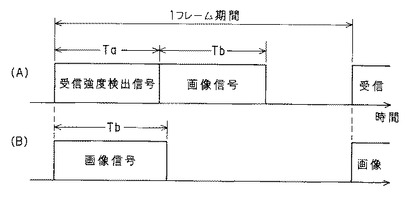
本実施例においては、カプセル型内視鏡3のアンテナ23から体外装置5に撮像回路31で撮像した画像信号を送信する場合には、例えば図5(A)に示すように画像信号と共に、受信強度を検出し易くする受信強度検出信号を送る。
【0016】
つまり、各1フレーム期間中には、受信強度検出用信号を送信する検出期間Taと、画像信号を送信する画像信号期間Tbを設けており、強度検出期間Taには一定の強度(振幅)の受信強度検出用信号を送信する。
そして、この受信強度検出用信号はアンテナユニット4のアンテナ11a、11b、…、11iにより受信され、送受信回路33に入力される。送受信回路33は、受信強度検出用信号を復調して信号処理回路34に送り、信号処理回路34は各アンテナ11s(s=a、b、…、i)により受信された受信強度検出用信号の強度を比較し、比較結果からカプセル型内視鏡3が送信した画像信号を受信するのに適したアンテナを選択して受信する。尚、図5(B)のように受信強度検出信号を省いて画像信号のみで同様に行うようにしても良い。
また、信号処理回路34は、受信するのに適したアンテナによって得られた画像信号及び各アンテナ11sの受信強度検出用信号を信号処理回路34に接続されているコンパクトフラッシュ(登録商標)等の不揮発性のメモリ35に送り、メモリ35に格納(記憶)する。
【0017】
この場合、画像信号を受信するアンテナとして複数、例えば2つのアンテナを選択して、同時に同じ内容の画像信号を2つ記録するようにしても良い。また、その際、記録する画像信号の強度を1フレーム分積算してその積算結果の大きい方をメモリ35に残し、他方を消去するようにしても良い。
また、信号処理回路34は、受信に最も適したアンテナによって得られた画像信号を信号処理回路34に接続される液晶モニタ12に送り、カプセル型内視鏡3で撮影された画像を表示する。
本実施例においては、上記のように体外装置5には、例えばCPU36により構成されるアンテナ位置&向き推定部36aが設けてあり、このアンテナ位置&向き推定部36aによって、カプセル型内視鏡3に内蔵されたアンテナ23の位置及び向きを算出する。
また、本実施例では、CPU36は、アンテナ位置&向き推定部36aの処理機能により算出された時系列的(経時的)に得られたアンテナ23の各位置をカプセル型内視鏡3の位置として、それら位置に対して、隣接する位置の間の距離が所定値以下の条件を満たすか否かの判定を行い、条件を満たすものを用いてより精度の高い軌跡(経路)を算出する軌跡推定部(軌跡算出部)36bの機能も持つ。
このアンテナ位置&向き推定部36aは、後述するようにアンテナ23の初期状態の位置及び向きの初期値(例えば、測定空間の中心位置とXYZ軸方向のいずれかの方向)を設定する。
そして、その0番目の更新値を用いて体外アンテナ11a、11b、…、11iに発生する電磁界の検出値を推定し、実際に検出(測定)される検出値との差の二乗和から0番目の位置及び向きに対する更新量を算出する。0番目の位置、向き及び0番目の位置、向きの更新値から1番目の位置及び/向きを算出する。
【0018】
この1番目の位置及び/向きに対して同様の推定処理を繰り返し行い、各推定前後の更新値の変化量が十分に小さな値以下になった更新値をアンテナ23の位置及び向きとする推定値補正処理を行う。このようにして、精度の高い位置及び向きを算出する。算出された位置及び向きの情報は例えばメモリ35に格納される。
本実施例において、アンテナユニット4の複数のアンテナ11a、11b、…、11iを用いて検出した受信強度信号からカプセル型内視鏡3の位置と向きを推定する推定手法について説明する。
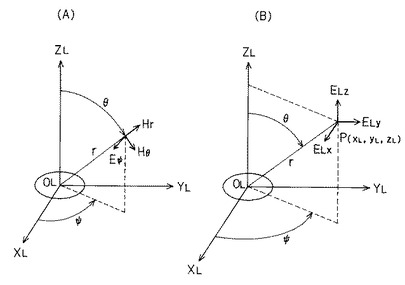
図6(A)に示すようにカプセル型内視鏡3内に配置された円形コイル或いは円形ループによるアンテナ23を基準とした座標系XLYLZLにおいて、任意の位置P(xL、yL、zL)における電磁界(静電界、放射電磁界、誘導電磁界の成分)Hr、Hθ、Eφは次の式で表される。
【0019】
Hr=(IS/2π)(jk/r2+1/r3)exp(-jkr)cosθ
Hθ=(IS/4π)(-k2/r+jk/r2+1/r3)exp(-jkr)sinθ (1)
Eψ= -(jωμIS/4π)(jk/r+1/r2)exp(-jkr)sinθ
ここで、Hr及びHθは磁界成分、Eψは電界成分を表し、またIとSはアンテナ23に流れる電流とそのアンテナ23を構成する円形コイルの面積である。また、rは、アンテナ23と任意の位置までの距離r=(x2+y2+z2)1/2、kはk=ω(εμ)1/2(εは誘電率、μは透磁率)、jは虚数単位である。
【0020】
カプセル型内視鏡3内に配置されたアンテナ23により発生する電磁界の周波数が高く、図1(A)に示すようにカプセル型内視鏡3と、患者2の体表に取り付けられたアンテナ11sとの距離が十分離れている場合には、アンテナ11sに到達する電磁界は、放射電磁界の成分が最も大きくなる(従って、静電界及び誘導電磁界の成分は、放射電磁界の成分より小さくなり、これらを無視することができる)。よって、式(1)は、次の式(2)のようになる。
Hr=0
Hθ=(IS/4π)(-k2/r)exp(-jkr)sinθ (2)
Eψ=−(jωμIS/4π)(jk/r)exp(-jkr)sinθ
患者2の体表に取り付けられたアンテナ11sが電界を検出するアンテナであるとすると、式(2)でその検出に必要な式は電界Eψとなる。
式(2)の電界Eψは、放射電界を表し、交流理論による結果と考えられる。従って、電界Eψの瞬時値は、式(2)の電界Eψに両辺にexp(jωt)を掛けて実部を抽出することにより求められる。
【0021】
Eψexp(jωt)=-(jωμIS/4π)(jk/r)exp(-jkr)sinθexp(jωt)
=(ωμISk/4πr)(cosU+jsinU)sinθ (3)
但し、U=ωt−krである。
ここで、式(3)の実部を抽出すると、電界E′ψの瞬時値は次のようになる。
E′ψ=(ωμISk/4πr)cosUsinθ (4)
また、式(4)を図6(B)に示すように極座標系(r,θ,ψ)から直交座標系(XL,YL,ZL)に変換すると、そのXL,YL,ZLの電界成分ELx、ELy、ELzは、
ELx、=E′ψsinψ=(ωμISk/4πr2)cosU・(-yL)
ELy、=E′ψcosψ=(ωμISk/4πr2)cosU・xL (5)
ELz=0
となる。
【0022】
また、カプセル型内視鏡3のアンテナ23を基準とした座標系 XLYLZLにおいて、位置P(xL、yL、zL) を患者2の体を基準とした座標系XWYWZWに変換する式は、
[数1]

となる。ただし、(xwp、ywp、zwp)と(xWG、yWG、zWG)は座標系XWYWZWでの位置P及びアンテナ23の位置をそれぞれ表す。また、式(6)における右辺第1項に用いられるRは、座標系XWYWZWと座標系XLYLZLの回転マトリクスを表し、次の式で求められる。
[数2]
ただし、α、βは極座標系の回転量である。
【0023】
従って、患者2の体を基準とした座標系XWYWZWにおける任意の位置P(xWP、yWP、zWP) の電界EWは、
[数3]
となり、式(5)、(6)、(7)を式(8)に代入することにより以下のような電界EWの式(9)が得られる。
【0024】
[数4]
但し、k1は定数、(gx、gy、gz)は、アンテナ23の向きを表す。
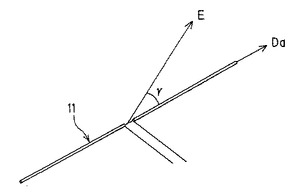
上記アンテナ23が発生した電界EWをアンテナユニット4を構成する例えばアンテナ11a、例えば図7に示すような棒状のアンテナ、つまりダイポールアンテナで受けたとき検出される起電力Vaは、以下の式で算出できる。
【0025】
Va=k2EWcosγ=k2((EWxDxa+EWyDya+EWzDza)(10)
ただし、k2は定数、Da(図7参照)は患者を基準とした座標系でのアンテナユニット4のアンテナ11aの向き(Dxa、Dya、Dza)を表す。
図3に示すように、アンテナユニット4の各アンテナ11sを患者の体に複数配置し、アンテナ23の位置と向きを反復改良により求める(Gauss−Newton法を用いる)。
xをアンテナ23の位置(xWG、yWG、zWG)と、向き(gx、gy、gz)のパラメータとし、そのパラメータの初期値をx(0)とする。
【0026】
いま、反復改良によりk次の推定値x(k)が得られ、アンテナ11sのコイルに発生する起電力のモデル関数V(x)をx(k)のまわりでTaylor展開すると、その一次近似は、
[数5]
となる。
このとき、Vmをアンテナ11sのコイルによって測定された起電力とすると、観測方程式は、
[数6]
と表される。ここで、近似等号は誤差σを含む。
【0027】
等式(8)の右辺第1項を左辺に移動すると、
[数7]
となる。但し、
ΔVm(k)=Vm−V(x(k))=Vm−Vm(k) (14)
Δx(k)=x−x(k) (15)
Ajs=[∂Vj(x)/∂xs]x=x(k)(j=1〜n、s=1〜i)(16)
(行方向):未知数の数n、列方向:アンテナ11sのコイルの数i)
である。解Δx(k)は、式(15)より
Δx(k)=(At(k)WA(k))−1At(k)WΔVm(k) (17)
と表される。ただし、AtはAの転置行列、Wは重み行列である。
【0028】
よって、式(14)より改良したパラメータの推定値は、
x(k+1)=x(k)+Δx(k) (18)
と求められる。
図3に示すように、患者に9個のアンテナ11a、11b、…、11iを設置した場合、行列Aは、
[数8]
重み行列Wは、
[数9]
と表される。ただし、重み行列Wのσj(j=0、1、…、8)は、アンテナ11jの測定電圧の変動量で、例えば環境ノイズ等である。
【0029】
また、第k番目のΔVmは、
[数10]
となることから、カプセル型内視鏡3内のアンテナ23の位置と向きは、次の手順(a)〜(d)で求められる。
(a)k=0とし、アンテナ23の初期値を位置(xWg(0)、yWg(0)、zWg(0))、向き(gx(0)、gy(0)、gz(0))とする(例えばアンテナ23を測定する空間の中心位置とZ軸方向のベクトル(0、0、1)とする)。
【0030】
(b)式(19)、(20)、(21)により第k番目の行列を計算する。
(c)式(18)により第k番目更新量Δx(k)を計算する。
(d)更新量Δx(k)が小さくなるまでの処理(b)から(d)を繰り返す。
このような推定処理を行うことにより、精度の高い位置及び向きの推定(算出)ができることになる。
【0031】
また、本実施例では以下に説明するようにして、時系列的に推定して算出された位置に対して、軌跡推定部36bにより軌跡推定の処理を行うことにより複数の位置が推定されたような場合においても、精度の高い或いは信頼性の高い軌跡を算出する。
上記位置及び向きの推定処理の手順において、受信するアンテナ11の個数、配置位置、アンテナ23の初期値の位置(xWg、yWg、zWg)(0)の与え方、ノイズ等によってアンテナ23若しくはカプセル型内視鏡3の位置が複数推定される。なお、アンテナ23はカプセル型内視鏡3内に固定されているので、アンテナ23の位置が推定されれば、カプセル型内視鏡3の位置も決定される。
体腔内においてカプセル型内視鏡3の動きは比較的小さく、画像を撮影する間隔が短い為、特定の時刻に推定された位置と時間的に前後する時刻に推定された位置は、ほぼ同一位置または近接した位置に存在すると考えられている。
【0032】
従って、時間的に前後する時刻に推定された複数の位置から近接した条件を満たす位置を抽出することにより各時刻で推定された位置の接続関係を求め、さらに全体的な接続関係の経路が最小となるものを算出して最終的な軌跡及び各時刻の正しいカプセル型内視鏡3の位置を算出する。
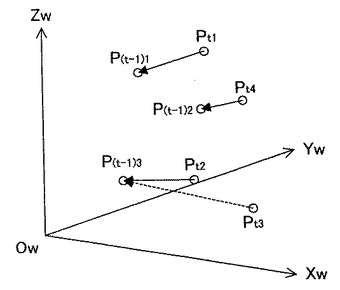
図8に示すように時刻t−1に推定された各位置をP(t-1)1、P(t-1)2、…、時刻tに推定された各位置をPt1、Pt2、…とする。
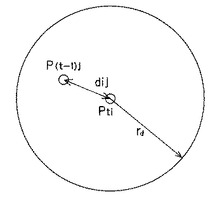
図9に示すように時刻tで推定された各位置Pti(i=1、2、3、…)に対して、カプセル型内視鏡3の位置推定を行う時間間隔の間にカプセル型内視鏡3が移動可能な距離に対応して、その値が予め設定された半径rdの球を設定する。
そして、その球の中に存在する時刻t−1の推定位置P(t-1)j(j=1、2、3、…)を検出する。時刻tで推定された位置Ptiと検出された時刻t−1の推定位置P(t-1)jとの距離dijを算出し、この距離dijが最小となる時刻t−1の推定位置P(t-1)jを求める。
【0033】
時刻tの各推定位置Pti(i=1、2、3、…)に最も近接した時刻t−1の推定位置を求め、その接続関係を記憶する。例えば、時刻t−1の推定位置が記憶されているアドレス情報等を関連付けして接続情報として記憶する。
図8において推定位置Pt3に最も近接した時刻t−1の推定位置はP(t-1)3であるが、この2点間の距離がrdより大きい場合、推定位置Pt3に接続される時刻t−1の推定位置は、ノイズ等に起因するものと判断し、推定位置Pt3の接続関係に用いる情報として保存しない。
このようにして、記録された全てのデータに対して位置推定を行い、接続関係を求める。そして、最後に記憶された推定位置を始点、最初の記憶された推定位置を終点とし、各推定位置と共に記憶された接続情報を用いて始点から終点までの接続関係の経路を探索する。そして、得られる経路が最小となるものを軌跡として算出すると共に、その軌跡から各時刻の推定位置を決定する。
なお、変形例として、得られた経路に含まれる点(推定位置)の数が最大となる経路を求め、それを軌跡とすると共に、その軌跡から各時刻の推定位置を決定するようにしても良い。この場合においては、経路に含まれる点の数が最大となる経路が複数算出された場合には、経路全体の距離が最小となるものを軌跡とするようにしても良い。
【0034】
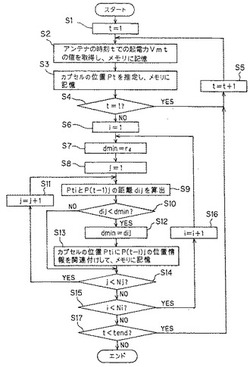
次に軌跡推定の動作を説明する。軌跡推定を行う前処理として隣接する2つの位置が軌跡を形成する場合の条件を満たす接続関係の位置となるか否かを算出(判定)する処理を行う。図10に沿ってこの接続関係を算出する処理を説明する。なお、図10では、時系列的に撮像した動作も含めた内容にしている。
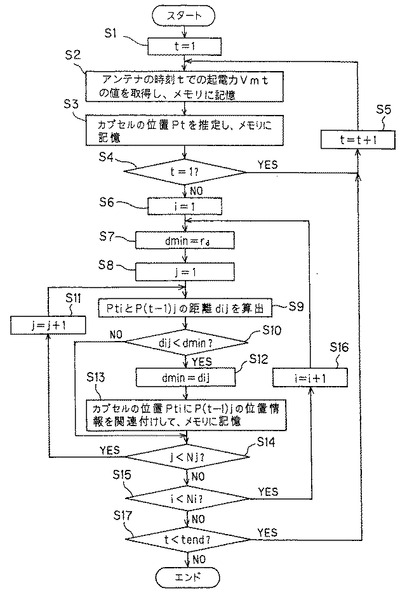
接続関係を算出する処理が開始すると、図10のステップS1に示すように体外装置5のCPU36は、時刻tをその初期値1、つまりt=1にセットする。このように、ここでは時刻tを整数化したパラメータを用いて簡略化して説明する。
そして、ステップS2に示すように体外装置5側のアンテナ11により、その時刻tで得られた起電力Vmt(上述した起電力Vmにおいて時刻tの値であることを明示した表記にしている)を取得し、記憶手段としてのメモリ35にその起電力Vmtの値が記憶される。
【0035】
ステップS3に示すようにCPU36は、メモリ35に格納された(複数のアンテナ11により時刻tで取得された)起電力Vmtの値を用いて、カプセル型内視鏡3の時刻tでの位置Ptiを推定し、メモリ35に記憶する。
以下で説明するように時刻tでの位置Ptiが複数推定される場合があり、その場合には複数の位置Ptiがメモリ35に格納される。また、この複数は時刻tが異なると一般的には異なる。このため、時刻tの場合に得られる位置の数をNi、時刻t−1の場合の数をNjとする。
そして、次のステップS4において、CPU36は、時刻tのパラメータ値が初期値1であるかの判定を行う。
【0036】
この場合には、時刻tのパラメータ値が1であるので、ステップS5に進み、パラメータ値を1つ増大した後、ステップS1及びステップS2の処理を行い、ステップS4の判定処理によりステップS6に進む。そして、ステップS6以降の処理において、各時刻tで推定(算出)されたノイズの影響を受けたものを含む位置Ptiに対して、その時刻tの1つ前の時刻t−1で推定された位置P(t-1)jのものとを経路として接続する処理を行う。
ステップS6においては、時刻tにおいて推定された各位置Ptの全体、つまり複数Ni個の位置Pti(i=1〜Ni)において、その位置を表すパラメータiを初期値1、つまりi=1に設定する。
そして、次のステップS7において、図9に示すようにCPU36は、最小距離dminの値として規定の半径rdを設定し、さらに次のステップS8においてCPU36は、時刻t−1において推定された位置P(t-1)jのもの、つまり複数Nj個の位置P(t-1)j (j=1〜Nj)の各位置を表すパラメータjを初期値1、つまりj=1に設定する。
【0037】
そして、次のステップS9においてCPU36は、時刻tで推定されたカプセル型内視鏡3の位置Ptiと時刻t−1で推定された位置P(t-1)jの距離dijを算出する。
さらに次のステップS10においてCPU36は、算出された距離dijがステップS7で予め設定した値の最小距離dminより小さいか否かの判定を行う。そして、その判定結果がdij<dminの条件を満たさない場合には、ステップS14においてCPU36は、パラメータjが時刻t−1で推定された位置P(t-1)jの数Nj未満かの判定を行う。この条件に該当する場合にはステップS11に示すようにパラメータjの値を1つ大きくしてステップS9に戻り、同様の処理を繰り返す。なお、ステップS10の条件を満たさないものは、以下の手順から分かるようにカプセル型内視鏡3の移動した軌跡の算出処理には使用しない。
一方、ステップS10の条件を満たすと判定された場合には、ステップS12に示すようにCPU36は、最小距離dminの値を距離dijで更新する。さらに次のステップS13においてCPU36は、カプセル型内視鏡3の時刻tで推定された位置Ptiに、この時刻tより1つ前の時刻t−1で推定された位置P(t-1)jの位置情報を関連付け、接続情報としてメモリ35に記憶する。なお、図10中(図11等でも同様)においては、カプセル型内視鏡を単にカプセルと略記する。
【0038】
次のステップS14においてCPU36は、パラメータjが時刻t−1で推定された位置P(t-1)jの数Nj未満かの判定を行い、これに該当する場合には、ステップS11を経てjの値を1つ大きくしてステップS9に戻り、同じ処理を繰り返す。
そして、このjの値が数Njに一致した場合には、次のステップS15に進み、CPU36は、パラメータiが時刻tで推定された位置Ptiの数Ni未満かの判定を行い、これに該当する場合には、ステップS16に進み、iの値を1つ大きくしてステップS7に戻り、同じ処理を繰り返す。
そして、このiの値が数Niに一致した場合には、ステップS17に進み、CPU36は、パラメータtが最後に測定された時刻tend未満か否かの判定を行い、この時刻tend未満に該当する場合にはステップS5に戻り、tの値を1つ大きくしてステップS2に戻る。そして同様の処理を繰り返す。
【0039】
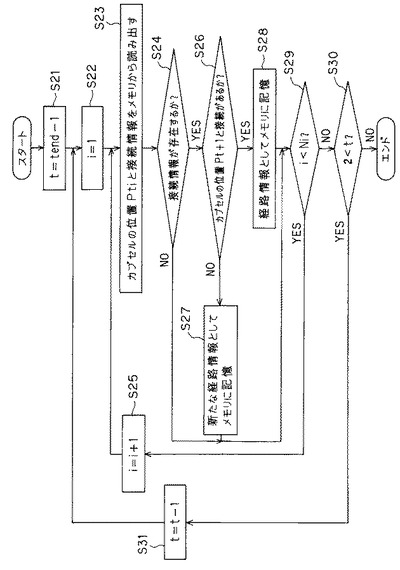
このようにして、時刻tが最後の時刻tendに一致すると、この処理を終了し、図11に示すように(図10の処理で判定された)接続関係を満たす位置のものの探索、つまり経路探索(軌跡算出)の処理を行うことにより、軌跡を算出(推定)する。
図11に示す経路探索の処理が開始すると、最初のステップS21において処理を行う時刻tとして最後の時刻tendの1つ前の時刻tend−1とする。次のステップS22において、時刻tにおいてCPU36は、推定された位置Ptiの1つを表すパラメータiを初期値1にセットする。
次のステップS23においてCPU36は、カプセル型内視鏡3の位置Ptiと接続情報をメモリ35から読み出す。そして、次のステップS24においてCPU36は、読み出した情報において接続情報が存在するかの判定を行う。
【0040】
接続情報が存在しない場合には、ステップS29においてCPU36は、位置のパラメータiがNi未満かの判定を行う。この条件に該当する場合には、ステップS25に示すように位置のパラメータiを1つ大きくして、そのパラメータi+1においてステップS23,S24の処理を行う。ステップS24の判定処理において、接続情報が存在する場合には、ステップS26の処理に進む。
ステップS26においてCPU36は、時刻tの次の時刻t+1(時刻t=tend-1では、t+1=tend)のカプセル型内視鏡3の位置Pt+1と接続があるかの判定を行う。そして、接続が存在しない場合には、ステップS27に移る。このステップS27においてCPU36は、新たな経路情報(例えば接続がとぎれているという経路情報)としてメモリ35に記憶した後、ステップS29の条件に応じてステップS25を経てステップS23の処理に戻る。
一方、ステップS26の判定処理において、次の時刻t+1のカプセル型内視鏡3の位置Pt+1と接続があるとCPU36により判定された場合には、ステップS28に進み、このステップS28においてCPU36は、この場合には接続された関係となっている情報を経路情報としてメモリ35に記憶する。
【0041】
次のステップS29においてCPU36は、位置のパラメータiがNi未満かの判定を行う。そして、位置のパラメータiがNi未満の場合には、ステップS25を経てその値を1つ大きくしてステップS22の処理に戻る。
このようにしてパラメータiを1つ大きくしてステップS22〜S29の処理を繰り返し行う。そして、パラメータiがNiに一致すると、ステップS30に進む。このステップS30においてCPU36は、時刻tが初期値2以下かの判定を行う。
時刻tが2以下でない場合(つまり3以上の場合)には、ステップS31に示すようにその時刻tの値を1つ小さくして、ステップS22の処理に戻る。そして、1つ前の時刻t−1に設定して同様の処理を繰り返す。このようにして、時刻tが初期値2になった場合にはこの処理を終了する。
【0042】
このようにして、時刻tが初期値1のカプセル型内視鏡3の位置Ptiから最後の時刻tendのカプセル型内視鏡3の位置Ptendまでの経路が算出される。
【0043】
そして、上述したようにこのようにして始点から終点に渡って得られた経路における最小となる経路を求め、それを軌跡とすると共に、その軌跡から各時刻の推定位置を決定する。
【0044】
なお、本実施例の変形例として、始点から終点に渡って得られた経路に含まれる推定された位置の数が最大となる経路を軌跡に設定しても良い。また、予め設定した距離rdの値等により、経路に含まれる点の数が最大となる経路が複数算出された場合には、経路全体の距離が最小となるものを軌跡とするようにしても良い。また、その場合に、最小となる経路、つまり軌跡から各時刻の推定位置を決定してもよい。
或いは、経路に含まれる点の数により経路の順位付けを行い、順位付けの上位側となるいくつかの経路に対してのみ経路全体の距離を求め、経路全体の距離が最小となる経路を、軌跡として決定するようにしても良い。また、その場合の軌跡から各時刻での推定位置を決定するようにしても良い。
【0045】
或いは、経路に含まれる点の数により経路の順位付けした場合の上位側となるいくつかの経路に対して、位置推定を行ったときに得られるコスト値(測定値と計算値の残差の2乗和等)の総和を求め、経路全体のコスト値の総和が最小となる経路を軌跡とし、その軌跡から各時刻の推定位置を決定してもよい。
このようにして、1つの軌跡を求められた場合には、図1(B)に示すモニタ部8c等で、その軌跡を表示する。
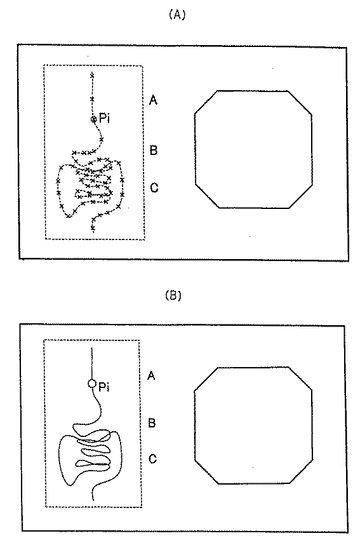
図12(A)及び図12(B)は、モニタ部8cでの表示例を示す。図12(A)では、表示面における左側には、体腔内におけるカプセル型内視鏡3における推定された各位置を直線で接続し、体腔内を移動したカプセル型内視鏡3の軌跡を示し、この表示面の右側には、(例えば左側でカーソルなどにより)指定された推定位置Ptiで撮像された画像が表示されるようにしている。
【0046】
また、表示面の左側の推定された位置による軌跡の右側に示す符号A,B,Cは体腔内における臓器の概略の位置を示し、具体的には符号Aは食道、Bは小腸、Cは大腸を表す。
図12(A)に示す表示法の他に、例えば図12(B)に示すように表示しても良い。この場合には、隣接する各位置間をスプライン補間のような補間処理を行い、各フレームで推定されたカプセル型内視鏡3の各位置を滑らかな曲線で接続するように表示している。
このように体腔内における推定された各位置とそれに対応して撮像された画像を表示できるようにしているので、撮像された画像が体腔内におけるどの位置で撮像されたかを容易に判断することができ、効率良く診断を行うことができる。
また、得られた画像から病変部の可能性があり、その部位をより詳細に内視鏡検査する必要があるような場合にも、その位置を精度良く推定できるため、円滑かつ短時間にその部位にアプローチすることができ、再検査や処置等を効率良く行うことができる。
【0047】
本実施例は、以下の効果を有する。
受信アンテナ11の個数、配置位置、アンテナ23の初期値の位置(xWg、yWg、zWg)(0)の与え方、ノイズ等によってカプセル型内視鏡3の位置が複数推定された場合でもカプセル型内視鏡3の位置を適切な方法で一意に決定でき、軌跡を算出できる。
また、所定の条件を満たすものを選択して軌跡を算出するようにしているので、算出された軌跡及び軌跡中の各位置は、信頼性が高いものとなり、診断等に有効に利用できる。
【実施例2】
【0048】
次に図13から図15を参照して本発明の実施例2を説明する。本実施例の構成は、実施例1と同様であり、実施例1とは軌跡推定部による軌跡を推定するプログラムの処理内容が異なる。
本実施例では以下に説明するようにカプセル型内視鏡3に対する位置推定を行う生体を複数の領域に分割して、カプセル型内視鏡3の推定された各位置が属する領域を時系列的に求める。そして、推定された各位置に対して、始点から終点までの経路を求め、得られる経路に含まれる領域の数が最大となる経路を軌跡とする処理を行うようにしている。
次に図13以降を参照して本実施例の作用を説明する。
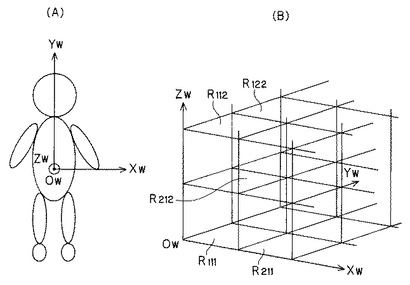
図13(A)は人体を基準とした座標系XwYwZwを示し、図13(B)はカプセル型内視鏡3が存在する空間を複数の領域(x=1、2、3、…、y=1、2、3、…、z=1、2、3、…)(例えば一辺が2cmの立方体)に分割した状態を示す。
実施例1においては、図9に示したように隣接する時刻tとt−1における位置PtiとP(t-1)jとの距離dijが距離rd以下である条件を満たすものを抽出して、経路或いは軌跡を決定する接続情報としていた。
これに対して、本実施例ではさらに演算処理を高速化するため、若しくは接続情報として残すものをより絞る。カプセル型内視鏡3が存在する空間を複数の領域Rxyzに分割して、時刻tで推定された位置Ptiが属する領域Rxyzを調べ、推定された位置が多く含まれる領域を経路探索(若しくは軌跡推定)に用いる接続領域とする。
この場合、時刻tで推定された位置Ptiが複数の領域に分散した場合、最も多く存在する領域を接続領域として、その領域とは異なる領域に属する位置は経路探索に使用しない。このようにして、ノイズ等により推定された位置の数が多くなった場合においても、経路探索に用いる位置の数を削減して、短時間で軌跡を算出することを可能にする。
また、時刻tとt−1で推定された位置PtiとP(t-1)jがそれぞれ属する領域Rxyzの位置関係により接続領域とする条件ともする。
【0049】
具体的には、時刻tとt−1で推定された位置PtiとP(t-1)jがそれぞれ属する2つの領域が同じ領域内に存在しない場合には、隣接する領域の関係を満たす領域、換言すると近接した小さな距離以内となるような特定の領域関係の条件を満たす領域のみをカプセル型内視鏡3の移動による接続領域とする。そして、隣接する関係になく、例えば離れた関係の領域間に対しては接続領域としない。
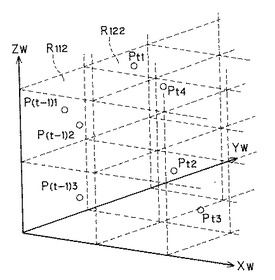
図14は時刻t−1、時刻tで得られたアンテナ11の複数の出力値からカプセル型内視鏡3の位置として推定された各位置P(t-1)j(j=1、2、3、…)、Pti(i=1、2、3、…)を示す。
体外装置5のCPU36は、推定された各位置Pti(i=1、2、3、…)が含まれる領域Rxyzを求める。
【0050】
図14では時刻tでは推定された位置としてPt1〜Pt4となり、時刻t−1では推定された位置としてP(t-1)1〜P(t-1)3となっている。この場合、位置Pt1、Pt4は領域R122に含まれ、位置Pt2は領域R121に、位置Pt3は領域R211に含まれている。また、位置P(t-1)1、P(t-1)2は、領域R112に含まれ、位置P(t-1)3は領域R111に含まれている。
また、CPU36は、時刻t−1と時刻tの推定位置の空間的な関係が接続情報として残す接続領域の接続関係の条件を満たすか否かの判定を行う。この場合、隣接する領域であるか否かにより接続領域であるか否かを決定する。
そして、CPU36は、時刻tで得られた領域と時刻t−1に得られた領域とで、接続される接続領域の情報をメモリ35に記憶する。また、CPU36は、記憶された全てのデータに対して抽出された領域と接続情報を記録する。
【0051】
最後に記憶された領域を始点、最初の記憶された領域を終点とし、抽出された領域とともに記憶された接続情報を用いて、実施例1で説明した軌跡推定の処理と類似した処理により始点から終点までの経路を求める。
得られた経路に含まれる領域の数が最大となる経路を求め、得られたその経路から各時刻の推定位置を決定する。この場合の推定位置は領域の中心位置(重心位置)とする。
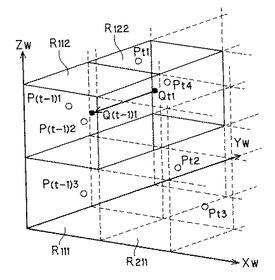
図14の具体例では、上述したように時刻tでは位置Pt1、Pt4が領域R122に最も多く存在し、かつ時刻t−1ではP(t-1)1、P(t-1)2が領域R122に隣接する領域R112に最も多く存在している。
【0052】
そして、これらの領域R122、R112が接続領域と見なされる。他の領域に属する位置Pt2、Pt3と、P(t-1)3は、経路探索には使用しない。
また、これらの領域R122、R112は互いに隣接しているため、経路探索に使用される接続領域となる。
図15は、図14の状態に対して、具体的に接続領域を決定した様子を示すものである。つまり、図15は時刻tに得られた領域から時刻t−1の領域との接続関係を決定する様子を示す。
図15では推定された位置が最大数となり、互いに隣接する接続領域R122、R112の場合には、時刻tでの推定位置は領域R122の中心位置(重心位置)Qt1となり、また時刻t−1での推定位置は領域R112の中心位置(重心位置)Q(t-1)1となる。なお、図15ではこれら2つの接続領域R112、R122を実線で示している。
【0053】
このようにして始点から終点までの経路探索を行い、最終的に1つの軌跡を算出する。
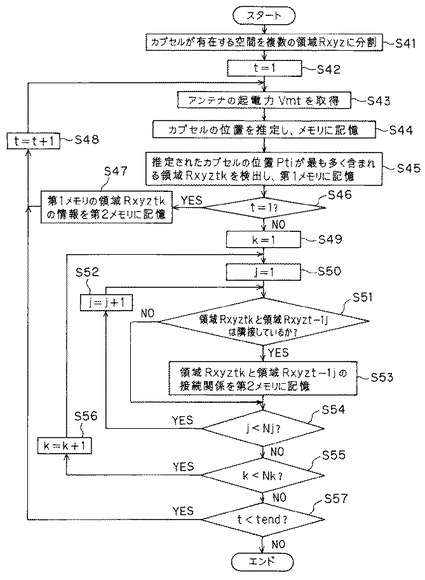
次に図16を参照して接続領域を決定する処理を説明する。動作が開始すると、最初のステップS41においてCPU36は、カプセル型内視鏡が存在する空間を複数の領域Rxyzに分割する処理を行う。
そして、次のステップS42においてCPU36は、時刻tを初期値1にした後、次のステップS43においてアンテナ11により、その時刻tで得られる起電力Vmtを取得する。
次のステップS44においてCPU36は、時刻tでの起電力Vmtの値を用いてカプセル型内視鏡3の位置Ptiを推定し、メモリ35に記憶する。位置Ptiは複数存在する場合があり、それを添え字iで示している。
次のステップS45においてCPU36は、推定されたカプセル型内視鏡3の位置Ptiが最も多く含まれる領域Rxyztkを検出してメモリ35内の例えば第1メモリに記憶する。この場合、領域Rxyztkは複数存在する可能性がある。ここで、添え字のtは時刻を示し、kは時刻tで検出された複数の領域Rxyztを区別するパラメータk(k=1,2,…Nk)を表す。
次のステップS46においてCPU36は、時刻tが初期値か否か、つまりt=1か否かの判定を行う。そして、t=1の場合には、ステップS47においてCPU36は、メモリ35の第1メモリに記憶した領域Rxyztkの情報を第2メモリに記憶した後、次のステップS48において時刻tをt+1とした後、ステップS43に戻る。
そして、ステップS43からS46の処理を行う。この場合にはステップS46の判定処理によりt=1ではないと判定されてステップS49の処理に進む。
ステップS49においてCPU36は、上記パラメータkを初期値、つまりk=1にセットした後、次のステップS50においてCPU36は、さらにパラメータjを初期値、つまりj=1にセットする。
【0054】
そして、次のステップS51においてCPU36は、領域Rxyztkと領域Rxyzt―1jが隣接しているか否かの判定を行う。ここで、領域Rxyzt−1jは、時刻t−1でカプセル型内視鏡3が検出された位置Pt-1jが最も多く含まれると推定された複数の領域Rxyzt−1を区別するパラメータj(j=1,2,…、Nj)を示している。
ステップS51においてCPU36は、領域Rxyztkと領域Rxyzt―1jが隣接していないと判定した場合には、ステップS54においてCPU36は、j<Njの判定を行う。この条件に該当する場合は、ステップS52においてjを1つ増大させた後、ステップS51の処理を行う。
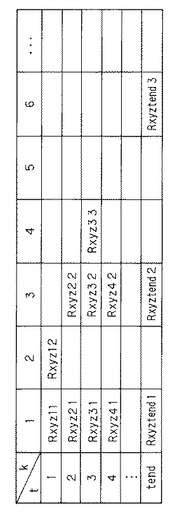
そして、領域Rxyztkと領域Rxyzt―1jが隣接していると判定した場合には、ステップS53においてCPU36は、領域Rxyztkと領域Rxyzt―1jが隣接している場合の接続関係をメモリ35の第2メモリに記憶する。図17は、第2メモリに領域Rxyztkと領域Rxyzt―1jの接続関係を、2次元配列で記憶した1例を示す。
図17では、領域Rxyzと時刻t、パラメータkの関係を2次元配列とすることにより、時刻tとt−1における2つの領域Rxyztkと領域Rxyzt―1jが隣接しているか否かの接続関係が簡単に分かるようにしている。図17において、時間軸(時間の配列方向となる縦軸)方向にライン状に並んだ場合には、それらは隣接している領域となる。
【0055】
ステップS53においてこのように処理した後、次のステップS54においてCPU36は、j<Njか否かの判定を行う。そして、この条件に該当すると判定した場合には、ステップS52の処理を行った後、ステップS51に戻る。
このようにして、j<Njまでの処理が繰り返し行われた後、j>Njとなるため、ステップS54の判定処理を経て次のステップS55に進む。このステップS55においてCPU36は、k<Nkかの判定処理を行い、この条件に該当する場合には次のステップS56においてCPU36は、kを1つ増大させてステップS50の処理に戻る。
このようにしてステップS50からステップS56までの処理を繰り返し行う。そして、k>Nkとなるため、ステップS55の判定処理を経てステップS57に進む。
【0056】
このステップS57においてCPU36は、t<tendか否かの判定を行い、この条件に該当する場合にはステップS48に戻り、このステップS48においてtをt+1にしてステップS43に戻る。
このようにして、ステップS43からステップS57の処理を繰り返す。そして、t<tendの条件に該当しない時刻になるとこの処理を終了する。
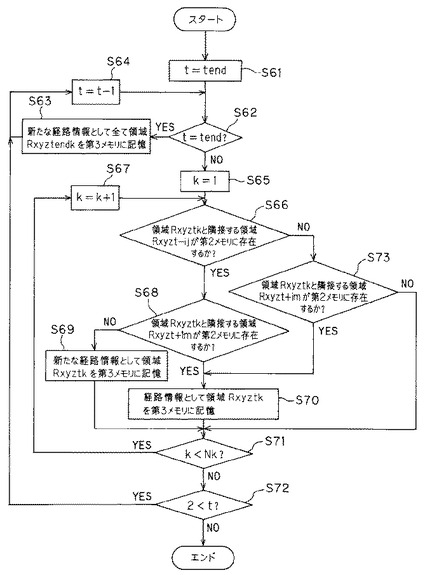
このようにして隣接する時刻における全ての接続関係の情報がメモリ35の第2メモリに記憶される。そして、図18に示すように接続関係の情報から軌跡探索の処理に進む。この処理が開始すると、最初のステップS61においてCPU36は、処理を行う時刻tとして最後の時刻tend、つまりt=tendとする。
次のステップS62においてCPU36は、t=tendの条件を満たすかの判定を行い、この条件を満たす場合には次のステップS63において、その時刻tendでの接続関係の情報を、新たな経路情報としてメモリ35の第2メモリに記憶された全て領域Rxyztendk(k=1,2,3…)をメモリ35の第3メモリに記憶する。その後、ステップS64において、時刻tを1つ前の時刻つまりt=t−1に設定してステップS62の処理に戻る。
【0057】
このステップS62においてCPU36は、t=tendの条件を満たさないと判定してステップS65に進み、パラメータkをk=1にセットした後、次のステップS66に進む。
このステップS66においてCPU36は、第2メモリに、領域Rxyztkに隣接する領域Rxyzt-1jが存在するか否かの判定を行う。
そして、隣接していないと判定した場合にはステップS73に進み、CPU36は、さらに第2メモリに領域Rxyztkに隣接する領域Rxyzt+1mが存在するか否かの判定を行う。ここでmは、時刻t+1の場合における領域Rxyzt+1が複数存在する場合、それらを区別するパラメータを表す。
【0058】
そして、隣接していないと判定した場合にはステップS71に進む。一方、ステップS73においてCPU36は、隣接する領域Rxyzt+1mが存在すると判定した場合にはステップS70に進むみ、CPU36は、この情報を経路情報として第3メモリに記憶した後、次のステップS71に進む。
【0059】
一方、ステップS66において隣接する領域Rxyzt-1jが存在すると判定した場合には、ステップS68に進み、CPU36は、さらに第2メモリに、領域Rxyztkに隣接する領域Rxyzt+1mが存在するか否かの判定を行う。ここで、mは時刻t+1の場合における領域Rxyzt+1が複数存在する場合、それらを区別するパラメータを表す。
【0060】
そして、隣接していないと判定した場合には、次のステップS69においてCPU36は、その情報を新たな経路情報として第3メモリに記憶した後、ステップS67の処理を経てステップS66に戻る。
一方、ステップS68においてCPU36は、隣接する領域Rxyzt+1mが存在すると判定した場合には、ステップS70に進み、CPU36は、この情報を経路情報として第3メモリに記憶した後、次のステップS71に進む。
そして、ステップS71においてCPU36は、k<Nkの条件を満たすかの判定を行い、この条件を満たす場合にはステップS67を経てステップS66に戻る。
一方、k<Nkの条件を満たさないと判定した場合には次のステップS72に進み、CPU36は、さらに2<tの条件を満たすか否かの判定を行う。そして、この条件を満たす場合にはステップS64を経てステップS62に戻る。
そして、1つ前の時刻t−1に設定して同様の処理を繰り返す。このようにして、時刻tが最初の時刻t=1になった場合にはこの処理を終了する。
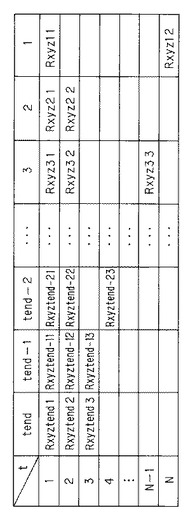
このような処理を行うことにより、第3メモリには例えば図19に示すような経路情報が記憶される。図19においては、各行で記載された領域が最も多い行を抽出し、領域を各時刻として接続(連結)したものがカプセル型内視鏡3の時間的な経路、つまり軌跡となる。
この他に以下のようにして経路(軌跡)を算出しても良い。
隣接する領域が複数存在する場合、各領域内に含まれる推定位置のコスト値(測定値と計算値の残差の2乗和等)の最小値を求め、抽出した領域のコスト値が最小の領域を接続領域とする。
各領域のコスト値が最小の推定位置の情報を、抽出された領域と接続情報とともに記録する。経路に含まれる領域の数により経路の順位付けを行い、上位いくつかの経路に対して経路全体の距離を求め、経路全体の距離が最小となる経路を軌跡として求める。また、コスト値の総和が最小となる経路を求め、それを軌跡としてもよい。
本実施例は以下の効果を有する。
本実施例は領域を設定することによって、推定する位置の数が少なくなり、実施例1よりも高速に経路の探索ができる。その他は、実施例1と同様に精度よく、カプセル型内視鏡3の位置及び軌跡を推定できる。
【実施例3】
【0061】
次に本発明の実施例3を説明する。本実施例の構成は実施例1と同様であり、軌跡推定部のプログラムの処理内容が異なる。本実施例では、以下に説明するように、ダイクストラ法で軌跡推定の処理を行う。
次に本実施例の作用を説明する。推定位置または領域と接続情報を求め、記録するまでは、実施例1或いは2と同様である。本実施例では、経路を決定する手法としてダイクストラ法を適用する。このダイクストラ法は、例えば非特許文献1に記載されている。
このダイクストラ法においては、例えば実施例1において時刻t=1からtendまでにおいて隣接する時刻t、t−1でそれぞれ推定された各位置をノードとしてそれらをラインLで結ぶ複数の経路を設定する。
【0062】
そして、それらにおけるラインLの長さ等に対して適当に重み付けを行い(勿論、1のように同じ重み付けでもよい)、可能となる全ての経路に対してそれぞれ途中の経路の値を加算した累積値(コスト値)が最小となるものを最終的な経路、つまり軌跡とする。
本実施例では、位置が推定された場合、それらに対してコスト値を算出して、比較する処理を行えば、最終的な経路を算出することができる。このため、以下の効果を有する。
ダイクストラ法を用いることにより、実施例1または実施例2よりも高速に経路の探索が出来る。
【実施例4】
【0063】
次に本発明の実施例4を説明する。本実施例の構成は実施例1と同様であり、軌跡推定部のプログラムの処理内容が異なる。
本実施例の作用としては、始点から終点までの経路が途中で切れた場合には、一方の経路の終点と他方の経路の始点との距離が最小になるように経路を接続する。
本実施例の効果として、経路が途中で途切れた場合でも始点から終点まで経路を探索することができる。
【実施例5】
【0064】
次に本発明の実施例5を説明する。本実施例の構成は実施例1と同様であり、軌跡推定部のプログラムの処理内容が異なる。
本実施例の作用としては、生体の部位に関する先見情報から推定位置/領域を拘束する。例えば、食道のような部位では、カプセル型内視鏡3が口から胃にほぼ直線的に移動すると考えられることから、推定される位置をほぼ予測でき、予測される範囲外で推定された位置は、処理の対象から外すようにする。
また、カプセル型内視鏡の移動方向(口から胃へ向かう方向)を予測できることから、推定位置または領域を接続する場合も、胃から口に向かう方向に接続するものは処理対象から除外する。
本実施例の効果として、高速に経路の探索ができる。
【実施例6】
【0065】
次に本発明の実施例6を説明する。本実施例の構成は実施例1と同様であり、軌跡推定部のプログラムの処理内容が異なる。
次に本実施例の作用を説明する。
受信するアンテナ11の個数、配置位置、アンテナ23の位置(xwg,ywg,zwg)(0)の初期値の与え方、ノイズ等によってカプセル型内視鏡3の位置が複数推定される。体腔内において画像を撮像する間隔が短時間でカプセル型内視鏡3の動きが比較的小さい為、特定の時刻に推定されたカプセル型内視鏡3の位置と時間的に前後する時刻に推定されたカプセル型内視鏡3の位置は、ほぼ同一位置または近接した位置として求められると考えられる。
【0066】
従って時間的に前後する時刻に推定された複数のカプセル型内視鏡3の位置を距離や推定時のコスト値等を条件として各時刻で推定されたカプセル型内視鏡3の位置を接続し、全体的な接続状態から各時刻のカプセル型内視鏡3の位置を求める。
図8に示したように時刻t−1に推定された位置をP(t-1)j (j=1,2,…、Nj)、時刻tに推定された位置をPti (i=1,2,…,Ni) とする。時刻t−1、時刻tで推定された位置P(t-1)j、Ptiに対して評価関数h(t-1)j,tiを以下のように設定する。
h(t-1)j,ti=d(t-1)j,ti+w(cost(t-1)j+ costti)
d(t-1)j,ti=[(Pxti−Px(t-1)j)2+(Pyti−Py(t-1)j)2+(Pzti−Pz(t-1)j)2]1/2 .
ただし、d(t-1)j,tiは各推定された位置の距離、cost(t-1)j、costtiは位置を推定するときに得られるコスト値、wは重み係数で、このwは、例えば距離3cmと位置推定時の最小コストcostminの3倍の値によって求める。
【0067】
つまり、
w=0.03/(3costmin)
としている。時刻t−1、時刻tで推定された位置P(t-1)j、Ptiの全ての組合せに対して評価関数の値を求める。そして、評価関数の値の小さい順に並べ、その場合の最も小さい値のものから上位いくつかを抽出して、記憶する。
例えば、評価関数に対して閾値を評定し、評価関数の値が閾値以上の場合、接続情報と評価関数の値は記憶しない。また、2点間の距離が大きい場合、例えば、5cm以上となる場合には評価関数の算出を中止し、接続情報等の記憶を行わない。
最後に、接続情報と共に記憶されたカプセル型内視鏡3の位置を始点として、接続情報に従って各時刻の推定位置を接続し、評価関数の値の合計を算出する。接続が最も長いルートを抽出することにより各時刻のカプセル型内視鏡3の位置として軌跡を求める。
【0068】
また、ルートが複数求められた場合、評価関数の合計の小さいルートから各時刻のカプセル型内視鏡3の位置を推定する。ルートが全て途中で切れた場合(評価関数が全て閾値以上、又は距離が5cm以上等)は、切れた時刻を始点にして前記同様の処理を行い、切れた部分間の接続は実施例4と同様に一方の経路の終点と他方の始点との距離が最短になるように接続する。
【0069】
時刻t−1、時刻tで推定された位置P(t-1)j、Ptiの全ての組合せに対して評価関数の値を求める。そして、評価関数の値の小さい順に並べ、その場合の最も小さい値のものから上位いくつかを抽出して、記憶する。
例えば、評価関数に対して閾値を評定し、評価関数の値が閾値以上の場合、接続情報と評価関数の値は記憶しない。また、2点間の距離が大きい場合、例えば、5cm以上となる場合には評価関数の算出を中止し、接続情報等の記憶を行わない。
本実施例は以下の効果を有する。
受信するアンテナ11の個数、配置位置、アンテナ23の初期の位置(xwg,ywg,zwg)(0)の与え方、ノイズ等によってカプセル型内視鏡3の位置が複数推定された場合でもカプセル型内視鏡3の位置を一意に決定できる。また、2点間の距離、コスト値を用いて評価関数を設定している為、この評価関数により正確なカプセル型内視鏡3の位置を推定できる。
【実施例7】
【0070】
次に本発明の実施例7を説明する。本実施例の構成は実施例1と同様であり、軌跡推定部の処理内容が異なる。
次に本実施例の作用を説明する。
上述したように図13(B)は、カプセル型内視鏡3が存在する空間を複数の領域Rxyz(x=1,2,3…、y=1,2,3,…、z=1,2,3,…)に分割した状態を示す。
また、図14は時刻t−1、時刻tで得られたアンテナ11の複数の出力値からカプセル型内視鏡3の推定された各位置p(t-1)j(j=1,2,3,…)、Pti(i=1,2,3,…)を示す。
【0071】
時刻tにおいて推定された位置Pti(i=1,2,3,…)が含まれる領域Rxyzを求める。また、時刻t−1で得られた領域と接続する場合、以下の評価関数を算出する。
h(t-1)j,ti=d(t-1)j,ti+w1(cost(t-1)j+ costti + w2/(nQlmn、+ nQlm+1n)
d(t-1)j,ti=[(Qxlmn−Qxlm+ln)2+(Qylmn−Qylm+ln)2+(Qzlmn−Qzlm+ln)2]1/2 .
ただし、d(t-1)j,tiは各推定された位置が含まれる領域Rxyzの重心位置Qt-1,Qttの距離、cost(t-1)j、costtiは位置を推定するときに得られるコスト値、w1,w2は重み係数で、例えば、w1は距離3cmと位置推定時の最小コストの3倍の値によって求められ、w2は分割した領域の数と各領域に含まれる推定位置の数(nQlmn、nQlm+1n)によって求められる。
【0072】
つまり、
w1=0.03/(3costmin)
w2=1000.0
上記評価関数によって抽出された時刻t−1と時刻tの推定位置の接続関係を分割された領域間で決定する。接続は隣接する領域間の移動のみとし、隣接する領域が複数存在する場合は領域内に含まれる推定位置の数が多い領域を接続領域とする。図15は時刻tに得られた領域から時刻t−1の接続の状態を示す。時刻tで得られた領域と時刻t−1に接続される領域の情報を記録する。記録された全てのデータに対して抽出された領域と接続情報を記録する。
【0073】
実施例2と同様に最後に記憶された領域を始点、最初に記憶された領域を終点とし、抽出された領域とともに記憶された接続情報を用いて始点から終点までの経路を求める。得られた経路に含まれる領域の数が最大となる経路を求め、得られた経路から各時刻の推定位置を決定する。この場合の推定位置は、領域の中心位置(重心位置)とする。
【0074】
隣接する領域が複数存在する場合、各領域内に含まれる推定位置のコスト値(測定値の計算値の残差の2乗和等)の最小値を求め、抽出した領域のコスト値が最小の領域を接続領域とする。
【0075】
各領域のコスト値が最小の推定位置の情報を抽出された領域と接続情報とともに記録する。経路に含まれる領域の数により経路の順位付けを行い、上位いくつかの経路に対して経路全体の距離を求め、経路全体の距離が最小となる経路を求める。また、コスト値の総和が最小となる経路を求めてもよい。
本実施例は以下の効果を有する。
領域を設定することにより推定位置の数が少なくなり、実施例1よりも高速に経路の探索ができる。
【0076】
なお、上述した各実施例等において、推定されたアンテナ23(或いはカプセル型内視鏡3)の位置の他に、向きの情報を用いて軌跡を算出する処理に利用しても良い。このように向きの情報も用いると、位置のみの場合よりも精度が高い或いは信頼性が高い軌跡及び位置の算出が可能となる。
なお、上述した各実施例において、異なる実施例を部分的に組み合わせる等して構成される実施例も本発明に属する。また、本発明の要旨を変更することなく、一部を変形したものも本発明に属する。
なお、上述した例では、生体内での生体情報として、体腔内を光学的に撮像した画像情報を取得する場合で説明したが、本発明はこれに限定されるものでなく、例えばpHセンサを設けてpHを算出するようなカプセル型医療装置にも適用できる。この他に、薬液とその薬液を散布する手段を設けて医療行為を行えるようにしても良い。
【0077】
[付記]
1.請求項6において、前記複数の経路の長さが最小となるものを算出する場合、ダイクストラ法で算出する。
2.請求項8において、前記評価関数における前記推定情報は、前記2つの位置を推定する際に得られるコスト値(測定値と計算値の残差の2乗和)である。
3.請求項8において、前記評価関数は、前記推定情報としてコスト値を重み付け係数で重み付けしたものを用いた。
4.請求項9において、前記判定手段は、前記2つの位置間の距離が前記条件として所定値以下を満たすか否かにより判定する。
5.請求項9において、前記算出手段は、前記接続関係にあると判定された位置のみに対して始点となる時刻から終点となる時刻までに得られる2点間の距離の総和を求め、前記総和が最小となるものを前記軌跡として算出する。
【産業上の利用可能性】
【0078】
口から飲み込まれることにより体内を撮像等して生体情報を取得するカプセル型医療装置において、内部に設けたアンテナから電磁波で体外に信号を送信し、その信号を体外に設けた複数のアンテナを用いて受信することにより、生体情報を取得した体内での位置を推定し、複数の位置が推定された場合にもさらに所定の条件を満たすものを抽出する等することにより、信頼性が高い軌跡と位置を算出して、診断に有効利用できるようにしている。
【図面の簡単な説明】
【0079】
【図1】本発明の実施例1のカプセル型内視鏡装置等の構成を示す図。
【図2】カプセル型内視鏡の内部構成を示す概略の断面図。
【図3】アンテナユニットを構成する複数のアンテナの配置例とそのアンテナに設定した座標系を示す図。
【図4】カプセル型内視鏡と体外装置における送受信する電気系の構成を示すブロック図。
【図5】カプセル型内視鏡から無線で送信する画像信号等を示す説明図。
【図6】カプセル型内視鏡の円形コイルによるアンテナによる任意の位置Pにおける電磁界等の成分を示す図。
【図7】図6のアンテナが発生した電界をアンテナユニットの棒状のアンテナで受けたとき検出される起電力を示す図。
【図8】経時的に隣接する時刻で推定された位置を示す図。
【図9】隣接する時刻で推定された位置が予め設定された半径rの球内にあるか否かの様子を示す図。
【図10】隣接する時刻で推定された位置により軌跡を構成する経路の候補となる接続関係を決定する処理のフローチャート図。
【図11】図10の処理後に、軌跡を算出する処理内容を示すフローチャート図。
【図12】カプセル型内視鏡により撮像された画像を算出された軌跡を形成する位置と共に表示する表示例を示す図。
【図13】本発明の実施例2における生体に設定した座標系及び生体を複数に分割した小領域を示す図。
【図14】隣接する時刻で推定された位置と小領域との関係を示す図。
【図15】隣接する時刻において推定された複数の位置から軌跡を算出する候補となる接続関係を決定する様子を示す図。
【図16】隣接する時刻において推定された複数の位置から軌跡を算出する候補となる接続関係を決定する処理内容のフローチャート図。
【図17】図16の処理により第2メモリに記憶される2次元配列の情報を示す図。
【図18】図16の処理後に軌跡を算出する処理内容のフローチャート図。
【図19】図18の処理により第3メモリに記憶される2次元配列の情報を示す図。
【符号の説明】
【0080】
1…カプセル型内視鏡装置
2…患者
3…カプセル型内視鏡
4…アンテナユニット
5…体外装置
11…アンテナ
12…液晶モニタ
15…対物レンズ
17…CCDイメージャ
20…送受信回路
23…アンテナ
33…送受信回路
35…メモリ
36…CPU
36a…アンテナ位置&向き推定部
36b…軌跡推定部
【技術分野】
【0001】
本発明は、生体内に挿入され、撮像等を行うカプセル型医療装置に関する。
【背景技術】
【0002】
挿入部を体腔内に挿入することにより、体腔内を診断或いは必要に応じて処置を行うことができる内視鏡は、医療用分野その他で広く普及している。
また、最近においては、口から飲み込むことにより、体腔内を撮像して内視鏡検査を行うことができるカプセル形状にしたカプセル型体内装置(カプセルと略記)を備えたカプセル型医療装置も実用化される状況になっている。
カプセルは、体腔内に挿入された場合には、通常は蠕動運動などにより体腔内を移動するため、カプセルにより得られる情報が、体腔内のどの位置に相当するものであるかを知ることが望ましい場合がある。
このため、例えば第1の従来例として特表2003−524448号公報においては、体腔内のカプセルからアンテナを介して無線送信した信号を体外に配置した複数のアンテナで受信して、その受信信号の強度等によりカプセルの位置を算出するものを開示している。
また、第2の従来例としての特開2005−198789号公報には、体腔内のカプセルのアンテナを介して無線送信した信号を体外に配置した複数のアンテナで受信して、その受信信号の強度等によりカプセルの位置及び向きを算出するものを開示している。
【特許文献1】特表2003−524448号公報
【特許文献2】特開2005−198789号公報
【非特許文献1】データ構造とアルゴリズム コロナ社(株) 斎藤、西原 共著p124−p129
【発明の開示】
【発明が解決しようとする課題】
【0003】
カプセルの位置を推定する場合において、ノイズ等のために複数の位置を推定してしまう可能性がある。このように、カプセルの位置が複数推定或いは検出されたような場合、上記第1及び第2の従来例では、適切に軌跡を算出する手段或いは方法を開示していない。
このように複数の位置が推定されたような場合には、カプセル内のアンテナの各時刻での位置が定まらないと、カプセルの移動の軌跡も定めにくくなり、カプセルにより得られる体内の情報等の利用価値が低くなってしまう。
【0004】
(発明の目的)
本発明は上述した点に鑑みてなされたもので、カプセル型体内装置の位置が複数推定された場合においても信頼性の高い軌跡及び位置を算出できるカプセル型医療装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明のカプセル型医療装置は、生体内に挿入され、アンテナを備えたカプセル型体内装置と、
前記カプセル型体内装置のアンテナから電磁波の信号を無線で送信する無線送信手段と、
前記生体外に配置される複数の体外アンテナと、
前記複数の体外アンテナによって受信した時刻における前記電磁波の信号から前記アンテナ若しくはカプセル型体内装置の位置を推定する推定手段と、
前記推定手段により推定された互いに異なる時刻の位置のものが複数推定された場合に対して設定される条件に従って前記カプセル型体内装置の移動した軌跡を算出する軌跡算出手段と、
を具備したことを特徴とする。
上記構成により、カプセル型体内装置に内蔵されたアンテナ若しくはカプセル型体内装置の位置を推定手段により推定し、異なる時刻で推定された位置に対して、設定される条件に従ってその条件を満たすものを用いて、軌跡を算出することにより、複数の位置が推定された場合にも信頼性が高い軌跡及び位置を算出できるようにしている。
【発明の効果】
【0006】
本発明によれば、複数の位置が推定された場合にも信頼性の高い軌跡及び位置を算出できる。
【発明を実施するための最良の形態】
【0007】
以下、図面を参照して本発明の実施例を説明する。
【実施例1】
【0008】
図1ないし図12は本発明の実施例1に係り、図1は本発明の実施例1のカプセル型内視鏡装置等の構成を示し、図2はカプセル型内視鏡の内部構成を示し、図3はアンテナユニットを構成する複数のアンテナの配置例とそのアンテナに設定した座標系を示し、図4はカプセル型内視鏡と体外装置における送受信する電気系の構成を示す。
また、図5はカプセル型内視鏡から無線で送信する画像信号等を示し、図6はカプセル型内視鏡の円形コイルによるアンテナから任意の位置における電磁界の成分などを示し、図7は図6のアンテナが発生した電界を受信するアンテナユニットを構成する棒状のアンテナの向きDaとの関係を示す。
【0009】
また、図8は経時的に隣接する時刻で推定された複数の位置を示し、図9は隣接する時刻で推定された位置が予め設定された値の半径rdの球内にあるか否かの様子を示し、図10は隣接する時刻で推定された位置により軌跡の候補となる接続関係を決定する処理内容を示し、図11は図10の処理後に軌跡を算出する処理内容を示し、図12はカプセル型内視鏡により撮像された画像を、算出された軌跡を形成する位置と共に表示した表示例を示す。
図1(A)に示すように本発明の実施例1のカプセル型内視鏡装置1は、患者2が口から飲み込むことにより体腔内に挿入されるカプセル型体内装置として、例えば体腔内を撮像するカプセル型内視鏡3と、この患者2の体外に配置され、カプセル型内視鏡3で撮像した画像情報を無線で受信するアンテナユニット4に接続される体外装置(或いは外部装置)5とを備えている。
図1(B)に示すようにこの体外装置5はクレードル6に装着することにより、パーソナルコンピュータ等により構成される端末装置7に電気的に接続され、端末装置7は体外装置5に蓄積した画像をキーボード8aやマウス8b等の入力・操作デバイスの操作によりこの端末装置7内に取り込み、取り込んだ画像をモニタ部8cで表示すること等ができる。
図1(A)に示すようにカプセル型内視鏡3を飲み込んで内視鏡検査を行う場合に使用される患者2が着るジャケット10には、複数のアンテナ11が取り付けられたアンテナユニット4が設けてある。
【0010】
カプセル型内視鏡3により撮像され、それに内蔵されたアンテナ23(図2参照)から送信された信号は、アンテナユニット4の複数のアンテナ11で受信され、このアンテナユニット4に接続された体外装置5に撮像した画像を保存することができるようにしている。
また、この体外装置5は、例えば箱形状であり、その前面には画像表示を行う液晶モニタ12と、指示操作等を行う操作部13とが設けてある。
なお、体外装置5には、バッテリ残量に関する警告表示用のLEDや操作部13としての電源スイッチなどのみを設ける構成としてもよい。また、第2の体外装置として、カプセル型内視鏡3から送信される画像信号を処理し、備え付けの液晶モニタ画像表示させるような図示しない携帯型の表示装置(ビュワー) が接続されるようにしても良い。
図2に示すようにカプセル型内視鏡3は、円筒の後端側を閉塞した形状を有する外装部材14と、この円筒の先端側に接着剤によって接続されて閉塞する略半球形状に丸みを付けたドーム型カバー14aにて、全体としてカプセル形状で水密構造となっている。
この透明なドーム型カバー14a内で、円筒の中央付近には、ドーム型カバー14aを介して入射された像を結像する対物レンズ15がレンズ枠16に取り付けられて配置され、その結像位置には撮像素子としてここではCCDイメージャ17が配置されている。
【0011】
また、対物レンズ15の周囲には、照明系として、ここでは白色LED18が4つ、同一平面上に配置されている。また、例えばCCDイメージャ17の裏面側には、白色LED18を発光駆動させると共に、CCDイメージャ17を駆動してCCDイメージャ17から入力される撮像信号から画像信号を生成する信号処理を行う処理回路19、画像信号を送信すると共に、体外装置5からの信号を受信する機能を持つ送受信回路20、これらの回路19、20に電源を供給するボタン型電池21が外装部材14の内部に配置されている。
また、ボタン型電池21の後端側、つまり他方の半球形状内側には送受信回路20と接続され、電波を送受信する円形コイル(円形のループコイル)状のアンテナ23が配置されている。なお、CCDイメージャ17、白色LED18や各回路は、図示しない基板上に設けられ、各基板はフレキシブル基板にて接続されている。
【0012】
カプセル型内視鏡3の処理回路19は、CCDイメージャ17の撮像のタイミングを制御する制御信号を発生し、通常の撮像では1秒間に2フレームの画像を撮像し、食道のようにカプセル型内視鏡3が比較的高速に移動するような部位では例えば15から30フレームの画像を撮像する。
また、アンテナ23は、体外装置5から送られてく信号を受信し、受信した信号は送受信回路20により処理され、処理回路19に送られる。処理回路19は送られてきた信号によってCCDイメージャ17の撮像のタイミングや白色LED18の点灯のON/OFF等を制御する。カプセル型内視鏡3の処理回路19に磁石等の磁性体を近づけるとカプセル型内視鏡3内の電源がON/OFF可能な回路を組み込み、患者がカプセル型内視鏡3を飲み込む前にカプセル型内視鏡3の電源を入れて画像を撮影しても良い。
図1(A)に示した患者2が着るジャケット10に取り付けたアンテナユニット4は、拡大して示すと、図3に示すようにアンテナ11a、11b、…、11iによって構成される。
【0013】
カプセル型内視鏡3及び体外装置5における送受信する部分の構成は、図4に示すようになる。 図4に示すようにカプセル型内視鏡3は、(白色LED18及びCCDイメージャ17からなる)撮像回路31により撮像され、処理回路19により処理された信号は、送受信回路20を経て高周波で変調され、円形のループコイルからなるアンテナ23から電波で送信される。
このアンテナ23から送信される信号は、体外のアンテナユニット4を構成する複数のアンテナ11a、11b、…、11iにより受信される。そして、複数のアンテナ11a、11b、…、11iに接続された送受信回路33により復調され、信号処理回路34に入力される。この信号処理回路34により画像信号に変換されて液晶モニタ12で表示されると共に、画像データ等がメモリ35に格納される。
また、メモリ35に格納された画像データは、ユーザによる操作部13からの指示操作により液晶モニタ12に送ることができ、その表示面に過去の画像を表示させることもできる。
【0014】
また、本実施例においては、体外装置5には、例えばCPU36を用いて構成されるアンテナ位置&向き推定部36aが設けてあり、このアンテナ位置&向き推定部36aは、カプセル型内視鏡3に内蔵されたアンテナ23の位置及び向きを推定する推定処理を行いその位置及び向きを算出する。
後述するようにこの推定処理は、初期状態では適宜に位置及び向きを設定して、それらに対してGauss−Newton法で位置及び向きの推定処理を反復して行う。その際、推定処理により、推定前の値とのずれ量が小さい値以下となるまで反復推定する。
換言すると、推定処理を行う推定手段と、その推定手段により推定された推定値(具体的には位置及び向き)が推定前の値と比較してその差分値が所定値以下となるように推定値を更新補正する更新補正手段とを備えている。
【0015】
また、体外装置5に設けられた操作部13を操作して、撮像周期を変更させる等の指示信号を信号処理回路34に入力すると、この信号処理回路34は、送受信回路33に指示信号を送り、送受信回路33は指示信号を変調してアンテナ11a、11b、…、11iから送信する。
アンテナ11a、11b、…、11iから送信された信号は、アンテナ23により受信され、送受信回路20により復調され、送受信回路20は、指示信号に対応して、例えば撮像周期を変更する動作等を行う。
本実施例においては、カプセル型内視鏡3のアンテナ23から体外装置5に撮像回路31で撮像した画像信号を送信する場合には、例えば図5(A)に示すように画像信号と共に、受信強度を検出し易くする受信強度検出信号を送る。
【0016】
つまり、各1フレーム期間中には、受信強度検出用信号を送信する検出期間Taと、画像信号を送信する画像信号期間Tbを設けており、強度検出期間Taには一定の強度(振幅)の受信強度検出用信号を送信する。
そして、この受信強度検出用信号はアンテナユニット4のアンテナ11a、11b、…、11iにより受信され、送受信回路33に入力される。送受信回路33は、受信強度検出用信号を復調して信号処理回路34に送り、信号処理回路34は各アンテナ11s(s=a、b、…、i)により受信された受信強度検出用信号の強度を比較し、比較結果からカプセル型内視鏡3が送信した画像信号を受信するのに適したアンテナを選択して受信する。尚、図5(B)のように受信強度検出信号を省いて画像信号のみで同様に行うようにしても良い。
また、信号処理回路34は、受信するのに適したアンテナによって得られた画像信号及び各アンテナ11sの受信強度検出用信号を信号処理回路34に接続されているコンパクトフラッシュ(登録商標)等の不揮発性のメモリ35に送り、メモリ35に格納(記憶)する。
【0017】
この場合、画像信号を受信するアンテナとして複数、例えば2つのアンテナを選択して、同時に同じ内容の画像信号を2つ記録するようにしても良い。また、その際、記録する画像信号の強度を1フレーム分積算してその積算結果の大きい方をメモリ35に残し、他方を消去するようにしても良い。
また、信号処理回路34は、受信に最も適したアンテナによって得られた画像信号を信号処理回路34に接続される液晶モニタ12に送り、カプセル型内視鏡3で撮影された画像を表示する。
本実施例においては、上記のように体外装置5には、例えばCPU36により構成されるアンテナ位置&向き推定部36aが設けてあり、このアンテナ位置&向き推定部36aによって、カプセル型内視鏡3に内蔵されたアンテナ23の位置及び向きを算出する。
また、本実施例では、CPU36は、アンテナ位置&向き推定部36aの処理機能により算出された時系列的(経時的)に得られたアンテナ23の各位置をカプセル型内視鏡3の位置として、それら位置に対して、隣接する位置の間の距離が所定値以下の条件を満たすか否かの判定を行い、条件を満たすものを用いてより精度の高い軌跡(経路)を算出する軌跡推定部(軌跡算出部)36bの機能も持つ。
このアンテナ位置&向き推定部36aは、後述するようにアンテナ23の初期状態の位置及び向きの初期値(例えば、測定空間の中心位置とXYZ軸方向のいずれかの方向)を設定する。
そして、その0番目の更新値を用いて体外アンテナ11a、11b、…、11iに発生する電磁界の検出値を推定し、実際に検出(測定)される検出値との差の二乗和から0番目の位置及び向きに対する更新量を算出する。0番目の位置、向き及び0番目の位置、向きの更新値から1番目の位置及び/向きを算出する。
【0018】
この1番目の位置及び/向きに対して同様の推定処理を繰り返し行い、各推定前後の更新値の変化量が十分に小さな値以下になった更新値をアンテナ23の位置及び向きとする推定値補正処理を行う。このようにして、精度の高い位置及び向きを算出する。算出された位置及び向きの情報は例えばメモリ35に格納される。
本実施例において、アンテナユニット4の複数のアンテナ11a、11b、…、11iを用いて検出した受信強度信号からカプセル型内視鏡3の位置と向きを推定する推定手法について説明する。
図6(A)に示すようにカプセル型内視鏡3内に配置された円形コイル或いは円形ループによるアンテナ23を基準とした座標系XLYLZLにおいて、任意の位置P(xL、yL、zL)における電磁界(静電界、放射電磁界、誘導電磁界の成分)Hr、Hθ、Eφは次の式で表される。
【0019】
Hr=(IS/2π)(jk/r2+1/r3)exp(-jkr)cosθ
Hθ=(IS/4π)(-k2/r+jk/r2+1/r3)exp(-jkr)sinθ (1)
Eψ= -(jωμIS/4π)(jk/r+1/r2)exp(-jkr)sinθ
ここで、Hr及びHθは磁界成分、Eψは電界成分を表し、またIとSはアンテナ23に流れる電流とそのアンテナ23を構成する円形コイルの面積である。また、rは、アンテナ23と任意の位置までの距離r=(x2+y2+z2)1/2、kはk=ω(εμ)1/2(εは誘電率、μは透磁率)、jは虚数単位である。
【0020】
カプセル型内視鏡3内に配置されたアンテナ23により発生する電磁界の周波数が高く、図1(A)に示すようにカプセル型内視鏡3と、患者2の体表に取り付けられたアンテナ11sとの距離が十分離れている場合には、アンテナ11sに到達する電磁界は、放射電磁界の成分が最も大きくなる(従って、静電界及び誘導電磁界の成分は、放射電磁界の成分より小さくなり、これらを無視することができる)。よって、式(1)は、次の式(2)のようになる。
Hr=0
Hθ=(IS/4π)(-k2/r)exp(-jkr)sinθ (2)
Eψ=−(jωμIS/4π)(jk/r)exp(-jkr)sinθ
患者2の体表に取り付けられたアンテナ11sが電界を検出するアンテナであるとすると、式(2)でその検出に必要な式は電界Eψとなる。
式(2)の電界Eψは、放射電界を表し、交流理論による結果と考えられる。従って、電界Eψの瞬時値は、式(2)の電界Eψに両辺にexp(jωt)を掛けて実部を抽出することにより求められる。
【0021】
Eψexp(jωt)=-(jωμIS/4π)(jk/r)exp(-jkr)sinθexp(jωt)
=(ωμISk/4πr)(cosU+jsinU)sinθ (3)
但し、U=ωt−krである。
ここで、式(3)の実部を抽出すると、電界E′ψの瞬時値は次のようになる。
E′ψ=(ωμISk/4πr)cosUsinθ (4)
また、式(4)を図6(B)に示すように極座標系(r,θ,ψ)から直交座標系(XL,YL,ZL)に変換すると、そのXL,YL,ZLの電界成分ELx、ELy、ELzは、
ELx、=E′ψsinψ=(ωμISk/4πr2)cosU・(-yL)
ELy、=E′ψcosψ=(ωμISk/4πr2)cosU・xL (5)
ELz=0
となる。
【0022】
また、カプセル型内視鏡3のアンテナ23を基準とした座標系 XLYLZLにおいて、位置P(xL、yL、zL) を患者2の体を基準とした座標系XWYWZWに変換する式は、
[数1]
となる。ただし、(xwp、ywp、zwp)と(xWG、yWG、zWG)は座標系XWYWZWでの位置P及びアンテナ23の位置をそれぞれ表す。また、式(6)における右辺第1項に用いられるRは、座標系XWYWZWと座標系XLYLZLの回転マトリクスを表し、次の式で求められる。
[数2]
ただし、α、βは極座標系の回転量である。
【0023】
従って、患者2の体を基準とした座標系XWYWZWにおける任意の位置P(xWP、yWP、zWP) の電界EWは、
[数3]
となり、式(5)、(6)、(7)を式(8)に代入することにより以下のような電界EWの式(9)が得られる。
【0024】
[数4]
但し、k1は定数、(gx、gy、gz)は、アンテナ23の向きを表す。
上記アンテナ23が発生した電界EWをアンテナユニット4を構成する例えばアンテナ11a、例えば図7に示すような棒状のアンテナ、つまりダイポールアンテナで受けたとき検出される起電力Vaは、以下の式で算出できる。
【0025】
Va=k2EWcosγ=k2((EWxDxa+EWyDya+EWzDza)(10)
ただし、k2は定数、Da(図7参照)は患者を基準とした座標系でのアンテナユニット4のアンテナ11aの向き(Dxa、Dya、Dza)を表す。
図3に示すように、アンテナユニット4の各アンテナ11sを患者の体に複数配置し、アンテナ23の位置と向きを反復改良により求める(Gauss−Newton法を用いる)。
xをアンテナ23の位置(xWG、yWG、zWG)と、向き(gx、gy、gz)のパラメータとし、そのパラメータの初期値をx(0)とする。
【0026】
いま、反復改良によりk次の推定値x(k)が得られ、アンテナ11sのコイルに発生する起電力のモデル関数V(x)をx(k)のまわりでTaylor展開すると、その一次近似は、
[数5]
となる。
このとき、Vmをアンテナ11sのコイルによって測定された起電力とすると、観測方程式は、
[数6]
と表される。ここで、近似等号は誤差σを含む。
【0027】
等式(8)の右辺第1項を左辺に移動すると、
[数7]
となる。但し、
ΔVm(k)=Vm−V(x(k))=Vm−Vm(k) (14)
Δx(k)=x−x(k) (15)
Ajs=[∂Vj(x)/∂xs]x=x(k)(j=1〜n、s=1〜i)(16)
(行方向):未知数の数n、列方向:アンテナ11sのコイルの数i)
である。解Δx(k)は、式(15)より
Δx(k)=(At(k)WA(k))−1At(k)WΔVm(k) (17)
と表される。ただし、AtはAの転置行列、Wは重み行列である。
【0028】
よって、式(14)より改良したパラメータの推定値は、
x(k+1)=x(k)+Δx(k) (18)
と求められる。
図3に示すように、患者に9個のアンテナ11a、11b、…、11iを設置した場合、行列Aは、
[数8]
重み行列Wは、
[数9]
と表される。ただし、重み行列Wのσj(j=0、1、…、8)は、アンテナ11jの測定電圧の変動量で、例えば環境ノイズ等である。
【0029】
また、第k番目のΔVmは、
[数10]
となることから、カプセル型内視鏡3内のアンテナ23の位置と向きは、次の手順(a)〜(d)で求められる。
(a)k=0とし、アンテナ23の初期値を位置(xWg(0)、yWg(0)、zWg(0))、向き(gx(0)、gy(0)、gz(0))とする(例えばアンテナ23を測定する空間の中心位置とZ軸方向のベクトル(0、0、1)とする)。
【0030】
(b)式(19)、(20)、(21)により第k番目の行列を計算する。
(c)式(18)により第k番目更新量Δx(k)を計算する。
(d)更新量Δx(k)が小さくなるまでの処理(b)から(d)を繰り返す。
このような推定処理を行うことにより、精度の高い位置及び向きの推定(算出)ができることになる。
【0031】
また、本実施例では以下に説明するようにして、時系列的に推定して算出された位置に対して、軌跡推定部36bにより軌跡推定の処理を行うことにより複数の位置が推定されたような場合においても、精度の高い或いは信頼性の高い軌跡を算出する。
上記位置及び向きの推定処理の手順において、受信するアンテナ11の個数、配置位置、アンテナ23の初期値の位置(xWg、yWg、zWg)(0)の与え方、ノイズ等によってアンテナ23若しくはカプセル型内視鏡3の位置が複数推定される。なお、アンテナ23はカプセル型内視鏡3内に固定されているので、アンテナ23の位置が推定されれば、カプセル型内視鏡3の位置も決定される。
体腔内においてカプセル型内視鏡3の動きは比較的小さく、画像を撮影する間隔が短い為、特定の時刻に推定された位置と時間的に前後する時刻に推定された位置は、ほぼ同一位置または近接した位置に存在すると考えられている。
【0032】
従って、時間的に前後する時刻に推定された複数の位置から近接した条件を満たす位置を抽出することにより各時刻で推定された位置の接続関係を求め、さらに全体的な接続関係の経路が最小となるものを算出して最終的な軌跡及び各時刻の正しいカプセル型内視鏡3の位置を算出する。
図8に示すように時刻t−1に推定された各位置をP(t-1)1、P(t-1)2、…、時刻tに推定された各位置をPt1、Pt2、…とする。
図9に示すように時刻tで推定された各位置Pti(i=1、2、3、…)に対して、カプセル型内視鏡3の位置推定を行う時間間隔の間にカプセル型内視鏡3が移動可能な距離に対応して、その値が予め設定された半径rdの球を設定する。
そして、その球の中に存在する時刻t−1の推定位置P(t-1)j(j=1、2、3、…)を検出する。時刻tで推定された位置Ptiと検出された時刻t−1の推定位置P(t-1)jとの距離dijを算出し、この距離dijが最小となる時刻t−1の推定位置P(t-1)jを求める。
【0033】
時刻tの各推定位置Pti(i=1、2、3、…)に最も近接した時刻t−1の推定位置を求め、その接続関係を記憶する。例えば、時刻t−1の推定位置が記憶されているアドレス情報等を関連付けして接続情報として記憶する。
図8において推定位置Pt3に最も近接した時刻t−1の推定位置はP(t-1)3であるが、この2点間の距離がrdより大きい場合、推定位置Pt3に接続される時刻t−1の推定位置は、ノイズ等に起因するものと判断し、推定位置Pt3の接続関係に用いる情報として保存しない。
このようにして、記録された全てのデータに対して位置推定を行い、接続関係を求める。そして、最後に記憶された推定位置を始点、最初の記憶された推定位置を終点とし、各推定位置と共に記憶された接続情報を用いて始点から終点までの接続関係の経路を探索する。そして、得られる経路が最小となるものを軌跡として算出すると共に、その軌跡から各時刻の推定位置を決定する。
なお、変形例として、得られた経路に含まれる点(推定位置)の数が最大となる経路を求め、それを軌跡とすると共に、その軌跡から各時刻の推定位置を決定するようにしても良い。この場合においては、経路に含まれる点の数が最大となる経路が複数算出された場合には、経路全体の距離が最小となるものを軌跡とするようにしても良い。
【0034】
次に軌跡推定の動作を説明する。軌跡推定を行う前処理として隣接する2つの位置が軌跡を形成する場合の条件を満たす接続関係の位置となるか否かを算出(判定)する処理を行う。図10に沿ってこの接続関係を算出する処理を説明する。なお、図10では、時系列的に撮像した動作も含めた内容にしている。
接続関係を算出する処理が開始すると、図10のステップS1に示すように体外装置5のCPU36は、時刻tをその初期値1、つまりt=1にセットする。このように、ここでは時刻tを整数化したパラメータを用いて簡略化して説明する。
そして、ステップS2に示すように体外装置5側のアンテナ11により、その時刻tで得られた起電力Vmt(上述した起電力Vmにおいて時刻tの値であることを明示した表記にしている)を取得し、記憶手段としてのメモリ35にその起電力Vmtの値が記憶される。
【0035】
ステップS3に示すようにCPU36は、メモリ35に格納された(複数のアンテナ11により時刻tで取得された)起電力Vmtの値を用いて、カプセル型内視鏡3の時刻tでの位置Ptiを推定し、メモリ35に記憶する。
以下で説明するように時刻tでの位置Ptiが複数推定される場合があり、その場合には複数の位置Ptiがメモリ35に格納される。また、この複数は時刻tが異なると一般的には異なる。このため、時刻tの場合に得られる位置の数をNi、時刻t−1の場合の数をNjとする。
そして、次のステップS4において、CPU36は、時刻tのパラメータ値が初期値1であるかの判定を行う。
【0036】
この場合には、時刻tのパラメータ値が1であるので、ステップS5に進み、パラメータ値を1つ増大した後、ステップS1及びステップS2の処理を行い、ステップS4の判定処理によりステップS6に進む。そして、ステップS6以降の処理において、各時刻tで推定(算出)されたノイズの影響を受けたものを含む位置Ptiに対して、その時刻tの1つ前の時刻t−1で推定された位置P(t-1)jのものとを経路として接続する処理を行う。
ステップS6においては、時刻tにおいて推定された各位置Ptの全体、つまり複数Ni個の位置Pti(i=1〜Ni)において、その位置を表すパラメータiを初期値1、つまりi=1に設定する。
そして、次のステップS7において、図9に示すようにCPU36は、最小距離dminの値として規定の半径rdを設定し、さらに次のステップS8においてCPU36は、時刻t−1において推定された位置P(t-1)jのもの、つまり複数Nj個の位置P(t-1)j (j=1〜Nj)の各位置を表すパラメータjを初期値1、つまりj=1に設定する。
【0037】
そして、次のステップS9においてCPU36は、時刻tで推定されたカプセル型内視鏡3の位置Ptiと時刻t−1で推定された位置P(t-1)jの距離dijを算出する。
さらに次のステップS10においてCPU36は、算出された距離dijがステップS7で予め設定した値の最小距離dminより小さいか否かの判定を行う。そして、その判定結果がdij<dminの条件を満たさない場合には、ステップS14においてCPU36は、パラメータjが時刻t−1で推定された位置P(t-1)jの数Nj未満かの判定を行う。この条件に該当する場合にはステップS11に示すようにパラメータjの値を1つ大きくしてステップS9に戻り、同様の処理を繰り返す。なお、ステップS10の条件を満たさないものは、以下の手順から分かるようにカプセル型内視鏡3の移動した軌跡の算出処理には使用しない。
一方、ステップS10の条件を満たすと判定された場合には、ステップS12に示すようにCPU36は、最小距離dminの値を距離dijで更新する。さらに次のステップS13においてCPU36は、カプセル型内視鏡3の時刻tで推定された位置Ptiに、この時刻tより1つ前の時刻t−1で推定された位置P(t-1)jの位置情報を関連付け、接続情報としてメモリ35に記憶する。なお、図10中(図11等でも同様)においては、カプセル型内視鏡を単にカプセルと略記する。
【0038】
次のステップS14においてCPU36は、パラメータjが時刻t−1で推定された位置P(t-1)jの数Nj未満かの判定を行い、これに該当する場合には、ステップS11を経てjの値を1つ大きくしてステップS9に戻り、同じ処理を繰り返す。
そして、このjの値が数Njに一致した場合には、次のステップS15に進み、CPU36は、パラメータiが時刻tで推定された位置Ptiの数Ni未満かの判定を行い、これに該当する場合には、ステップS16に進み、iの値を1つ大きくしてステップS7に戻り、同じ処理を繰り返す。
そして、このiの値が数Niに一致した場合には、ステップS17に進み、CPU36は、パラメータtが最後に測定された時刻tend未満か否かの判定を行い、この時刻tend未満に該当する場合にはステップS5に戻り、tの値を1つ大きくしてステップS2に戻る。そして同様の処理を繰り返す。
【0039】
このようにして、時刻tが最後の時刻tendに一致すると、この処理を終了し、図11に示すように(図10の処理で判定された)接続関係を満たす位置のものの探索、つまり経路探索(軌跡算出)の処理を行うことにより、軌跡を算出(推定)する。
図11に示す経路探索の処理が開始すると、最初のステップS21において処理を行う時刻tとして最後の時刻tendの1つ前の時刻tend−1とする。次のステップS22において、時刻tにおいてCPU36は、推定された位置Ptiの1つを表すパラメータiを初期値1にセットする。
次のステップS23においてCPU36は、カプセル型内視鏡3の位置Ptiと接続情報をメモリ35から読み出す。そして、次のステップS24においてCPU36は、読み出した情報において接続情報が存在するかの判定を行う。
【0040】
接続情報が存在しない場合には、ステップS29においてCPU36は、位置のパラメータiがNi未満かの判定を行う。この条件に該当する場合には、ステップS25に示すように位置のパラメータiを1つ大きくして、そのパラメータi+1においてステップS23,S24の処理を行う。ステップS24の判定処理において、接続情報が存在する場合には、ステップS26の処理に進む。
ステップS26においてCPU36は、時刻tの次の時刻t+1(時刻t=tend-1では、t+1=tend)のカプセル型内視鏡3の位置Pt+1と接続があるかの判定を行う。そして、接続が存在しない場合には、ステップS27に移る。このステップS27においてCPU36は、新たな経路情報(例えば接続がとぎれているという経路情報)としてメモリ35に記憶した後、ステップS29の条件に応じてステップS25を経てステップS23の処理に戻る。
一方、ステップS26の判定処理において、次の時刻t+1のカプセル型内視鏡3の位置Pt+1と接続があるとCPU36により判定された場合には、ステップS28に進み、このステップS28においてCPU36は、この場合には接続された関係となっている情報を経路情報としてメモリ35に記憶する。
【0041】
次のステップS29においてCPU36は、位置のパラメータiがNi未満かの判定を行う。そして、位置のパラメータiがNi未満の場合には、ステップS25を経てその値を1つ大きくしてステップS22の処理に戻る。
このようにしてパラメータiを1つ大きくしてステップS22〜S29の処理を繰り返し行う。そして、パラメータiがNiに一致すると、ステップS30に進む。このステップS30においてCPU36は、時刻tが初期値2以下かの判定を行う。
時刻tが2以下でない場合(つまり3以上の場合)には、ステップS31に示すようにその時刻tの値を1つ小さくして、ステップS22の処理に戻る。そして、1つ前の時刻t−1に設定して同様の処理を繰り返す。このようにして、時刻tが初期値2になった場合にはこの処理を終了する。
【0042】
このようにして、時刻tが初期値1のカプセル型内視鏡3の位置Ptiから最後の時刻tendのカプセル型内視鏡3の位置Ptendまでの経路が算出される。
【0043】
そして、上述したようにこのようにして始点から終点に渡って得られた経路における最小となる経路を求め、それを軌跡とすると共に、その軌跡から各時刻の推定位置を決定する。
【0044】
なお、本実施例の変形例として、始点から終点に渡って得られた経路に含まれる推定された位置の数が最大となる経路を軌跡に設定しても良い。また、予め設定した距離rdの値等により、経路に含まれる点の数が最大となる経路が複数算出された場合には、経路全体の距離が最小となるものを軌跡とするようにしても良い。また、その場合に、最小となる経路、つまり軌跡から各時刻の推定位置を決定してもよい。
或いは、経路に含まれる点の数により経路の順位付けを行い、順位付けの上位側となるいくつかの経路に対してのみ経路全体の距離を求め、経路全体の距離が最小となる経路を、軌跡として決定するようにしても良い。また、その場合の軌跡から各時刻での推定位置を決定するようにしても良い。
【0045】
或いは、経路に含まれる点の数により経路の順位付けした場合の上位側となるいくつかの経路に対して、位置推定を行ったときに得られるコスト値(測定値と計算値の残差の2乗和等)の総和を求め、経路全体のコスト値の総和が最小となる経路を軌跡とし、その軌跡から各時刻の推定位置を決定してもよい。
このようにして、1つの軌跡を求められた場合には、図1(B)に示すモニタ部8c等で、その軌跡を表示する。
図12(A)及び図12(B)は、モニタ部8cでの表示例を示す。図12(A)では、表示面における左側には、体腔内におけるカプセル型内視鏡3における推定された各位置を直線で接続し、体腔内を移動したカプセル型内視鏡3の軌跡を示し、この表示面の右側には、(例えば左側でカーソルなどにより)指定された推定位置Ptiで撮像された画像が表示されるようにしている。
【0046】
また、表示面の左側の推定された位置による軌跡の右側に示す符号A,B,Cは体腔内における臓器の概略の位置を示し、具体的には符号Aは食道、Bは小腸、Cは大腸を表す。
図12(A)に示す表示法の他に、例えば図12(B)に示すように表示しても良い。この場合には、隣接する各位置間をスプライン補間のような補間処理を行い、各フレームで推定されたカプセル型内視鏡3の各位置を滑らかな曲線で接続するように表示している。
このように体腔内における推定された各位置とそれに対応して撮像された画像を表示できるようにしているので、撮像された画像が体腔内におけるどの位置で撮像されたかを容易に判断することができ、効率良く診断を行うことができる。
また、得られた画像から病変部の可能性があり、その部位をより詳細に内視鏡検査する必要があるような場合にも、その位置を精度良く推定できるため、円滑かつ短時間にその部位にアプローチすることができ、再検査や処置等を効率良く行うことができる。
【0047】
本実施例は、以下の効果を有する。
受信アンテナ11の個数、配置位置、アンテナ23の初期値の位置(xWg、yWg、zWg)(0)の与え方、ノイズ等によってカプセル型内視鏡3の位置が複数推定された場合でもカプセル型内視鏡3の位置を適切な方法で一意に決定でき、軌跡を算出できる。
また、所定の条件を満たすものを選択して軌跡を算出するようにしているので、算出された軌跡及び軌跡中の各位置は、信頼性が高いものとなり、診断等に有効に利用できる。
【実施例2】
【0048】
次に図13から図15を参照して本発明の実施例2を説明する。本実施例の構成は、実施例1と同様であり、実施例1とは軌跡推定部による軌跡を推定するプログラムの処理内容が異なる。
本実施例では以下に説明するようにカプセル型内視鏡3に対する位置推定を行う生体を複数の領域に分割して、カプセル型内視鏡3の推定された各位置が属する領域を時系列的に求める。そして、推定された各位置に対して、始点から終点までの経路を求め、得られる経路に含まれる領域の数が最大となる経路を軌跡とする処理を行うようにしている。
次に図13以降を参照して本実施例の作用を説明する。
図13(A)は人体を基準とした座標系XwYwZwを示し、図13(B)はカプセル型内視鏡3が存在する空間を複数の領域(x=1、2、3、…、y=1、2、3、…、z=1、2、3、…)(例えば一辺が2cmの立方体)に分割した状態を示す。
実施例1においては、図9に示したように隣接する時刻tとt−1における位置PtiとP(t-1)jとの距離dijが距離rd以下である条件を満たすものを抽出して、経路或いは軌跡を決定する接続情報としていた。
これに対して、本実施例ではさらに演算処理を高速化するため、若しくは接続情報として残すものをより絞る。カプセル型内視鏡3が存在する空間を複数の領域Rxyzに分割して、時刻tで推定された位置Ptiが属する領域Rxyzを調べ、推定された位置が多く含まれる領域を経路探索(若しくは軌跡推定)に用いる接続領域とする。
この場合、時刻tで推定された位置Ptiが複数の領域に分散した場合、最も多く存在する領域を接続領域として、その領域とは異なる領域に属する位置は経路探索に使用しない。このようにして、ノイズ等により推定された位置の数が多くなった場合においても、経路探索に用いる位置の数を削減して、短時間で軌跡を算出することを可能にする。
また、時刻tとt−1で推定された位置PtiとP(t-1)jがそれぞれ属する領域Rxyzの位置関係により接続領域とする条件ともする。
【0049】
具体的には、時刻tとt−1で推定された位置PtiとP(t-1)jがそれぞれ属する2つの領域が同じ領域内に存在しない場合には、隣接する領域の関係を満たす領域、換言すると近接した小さな距離以内となるような特定の領域関係の条件を満たす領域のみをカプセル型内視鏡3の移動による接続領域とする。そして、隣接する関係になく、例えば離れた関係の領域間に対しては接続領域としない。
図14は時刻t−1、時刻tで得られたアンテナ11の複数の出力値からカプセル型内視鏡3の位置として推定された各位置P(t-1)j(j=1、2、3、…)、Pti(i=1、2、3、…)を示す。
体外装置5のCPU36は、推定された各位置Pti(i=1、2、3、…)が含まれる領域Rxyzを求める。
【0050】
図14では時刻tでは推定された位置としてPt1〜Pt4となり、時刻t−1では推定された位置としてP(t-1)1〜P(t-1)3となっている。この場合、位置Pt1、Pt4は領域R122に含まれ、位置Pt2は領域R121に、位置Pt3は領域R211に含まれている。また、位置P(t-1)1、P(t-1)2は、領域R112に含まれ、位置P(t-1)3は領域R111に含まれている。
また、CPU36は、時刻t−1と時刻tの推定位置の空間的な関係が接続情報として残す接続領域の接続関係の条件を満たすか否かの判定を行う。この場合、隣接する領域であるか否かにより接続領域であるか否かを決定する。
そして、CPU36は、時刻tで得られた領域と時刻t−1に得られた領域とで、接続される接続領域の情報をメモリ35に記憶する。また、CPU36は、記憶された全てのデータに対して抽出された領域と接続情報を記録する。
【0051】
最後に記憶された領域を始点、最初の記憶された領域を終点とし、抽出された領域とともに記憶された接続情報を用いて、実施例1で説明した軌跡推定の処理と類似した処理により始点から終点までの経路を求める。
得られた経路に含まれる領域の数が最大となる経路を求め、得られたその経路から各時刻の推定位置を決定する。この場合の推定位置は領域の中心位置(重心位置)とする。
図14の具体例では、上述したように時刻tでは位置Pt1、Pt4が領域R122に最も多く存在し、かつ時刻t−1ではP(t-1)1、P(t-1)2が領域R122に隣接する領域R112に最も多く存在している。
【0052】
そして、これらの領域R122、R112が接続領域と見なされる。他の領域に属する位置Pt2、Pt3と、P(t-1)3は、経路探索には使用しない。
また、これらの領域R122、R112は互いに隣接しているため、経路探索に使用される接続領域となる。
図15は、図14の状態に対して、具体的に接続領域を決定した様子を示すものである。つまり、図15は時刻tに得られた領域から時刻t−1の領域との接続関係を決定する様子を示す。
図15では推定された位置が最大数となり、互いに隣接する接続領域R122、R112の場合には、時刻tでの推定位置は領域R122の中心位置(重心位置)Qt1となり、また時刻t−1での推定位置は領域R112の中心位置(重心位置)Q(t-1)1となる。なお、図15ではこれら2つの接続領域R112、R122を実線で示している。
【0053】
このようにして始点から終点までの経路探索を行い、最終的に1つの軌跡を算出する。
次に図16を参照して接続領域を決定する処理を説明する。動作が開始すると、最初のステップS41においてCPU36は、カプセル型内視鏡が存在する空間を複数の領域Rxyzに分割する処理を行う。
そして、次のステップS42においてCPU36は、時刻tを初期値1にした後、次のステップS43においてアンテナ11により、その時刻tで得られる起電力Vmtを取得する。
次のステップS44においてCPU36は、時刻tでの起電力Vmtの値を用いてカプセル型内視鏡3の位置Ptiを推定し、メモリ35に記憶する。位置Ptiは複数存在する場合があり、それを添え字iで示している。
次のステップS45においてCPU36は、推定されたカプセル型内視鏡3の位置Ptiが最も多く含まれる領域Rxyztkを検出してメモリ35内の例えば第1メモリに記憶する。この場合、領域Rxyztkは複数存在する可能性がある。ここで、添え字のtは時刻を示し、kは時刻tで検出された複数の領域Rxyztを区別するパラメータk(k=1,2,…Nk)を表す。
次のステップS46においてCPU36は、時刻tが初期値か否か、つまりt=1か否かの判定を行う。そして、t=1の場合には、ステップS47においてCPU36は、メモリ35の第1メモリに記憶した領域Rxyztkの情報を第2メモリに記憶した後、次のステップS48において時刻tをt+1とした後、ステップS43に戻る。
そして、ステップS43からS46の処理を行う。この場合にはステップS46の判定処理によりt=1ではないと判定されてステップS49の処理に進む。
ステップS49においてCPU36は、上記パラメータkを初期値、つまりk=1にセットした後、次のステップS50においてCPU36は、さらにパラメータjを初期値、つまりj=1にセットする。
【0054】
そして、次のステップS51においてCPU36は、領域Rxyztkと領域Rxyzt―1jが隣接しているか否かの判定を行う。ここで、領域Rxyzt−1jは、時刻t−1でカプセル型内視鏡3が検出された位置Pt-1jが最も多く含まれると推定された複数の領域Rxyzt−1を区別するパラメータj(j=1,2,…、Nj)を示している。
ステップS51においてCPU36は、領域Rxyztkと領域Rxyzt―1jが隣接していないと判定した場合には、ステップS54においてCPU36は、j<Njの判定を行う。この条件に該当する場合は、ステップS52においてjを1つ増大させた後、ステップS51の処理を行う。
そして、領域Rxyztkと領域Rxyzt―1jが隣接していると判定した場合には、ステップS53においてCPU36は、領域Rxyztkと領域Rxyzt―1jが隣接している場合の接続関係をメモリ35の第2メモリに記憶する。図17は、第2メモリに領域Rxyztkと領域Rxyzt―1jの接続関係を、2次元配列で記憶した1例を示す。
図17では、領域Rxyzと時刻t、パラメータkの関係を2次元配列とすることにより、時刻tとt−1における2つの領域Rxyztkと領域Rxyzt―1jが隣接しているか否かの接続関係が簡単に分かるようにしている。図17において、時間軸(時間の配列方向となる縦軸)方向にライン状に並んだ場合には、それらは隣接している領域となる。
【0055】
ステップS53においてこのように処理した後、次のステップS54においてCPU36は、j<Njか否かの判定を行う。そして、この条件に該当すると判定した場合には、ステップS52の処理を行った後、ステップS51に戻る。
このようにして、j<Njまでの処理が繰り返し行われた後、j>Njとなるため、ステップS54の判定処理を経て次のステップS55に進む。このステップS55においてCPU36は、k<Nkかの判定処理を行い、この条件に該当する場合には次のステップS56においてCPU36は、kを1つ増大させてステップS50の処理に戻る。
このようにしてステップS50からステップS56までの処理を繰り返し行う。そして、k>Nkとなるため、ステップS55の判定処理を経てステップS57に進む。
【0056】
このステップS57においてCPU36は、t<tendか否かの判定を行い、この条件に該当する場合にはステップS48に戻り、このステップS48においてtをt+1にしてステップS43に戻る。
このようにして、ステップS43からステップS57の処理を繰り返す。そして、t<tendの条件に該当しない時刻になるとこの処理を終了する。
このようにして隣接する時刻における全ての接続関係の情報がメモリ35の第2メモリに記憶される。そして、図18に示すように接続関係の情報から軌跡探索の処理に進む。この処理が開始すると、最初のステップS61においてCPU36は、処理を行う時刻tとして最後の時刻tend、つまりt=tendとする。
次のステップS62においてCPU36は、t=tendの条件を満たすかの判定を行い、この条件を満たす場合には次のステップS63において、その時刻tendでの接続関係の情報を、新たな経路情報としてメモリ35の第2メモリに記憶された全て領域Rxyztendk(k=1,2,3…)をメモリ35の第3メモリに記憶する。その後、ステップS64において、時刻tを1つ前の時刻つまりt=t−1に設定してステップS62の処理に戻る。
【0057】
このステップS62においてCPU36は、t=tendの条件を満たさないと判定してステップS65に進み、パラメータkをk=1にセットした後、次のステップS66に進む。
このステップS66においてCPU36は、第2メモリに、領域Rxyztkに隣接する領域Rxyzt-1jが存在するか否かの判定を行う。
そして、隣接していないと判定した場合にはステップS73に進み、CPU36は、さらに第2メモリに領域Rxyztkに隣接する領域Rxyzt+1mが存在するか否かの判定を行う。ここでmは、時刻t+1の場合における領域Rxyzt+1が複数存在する場合、それらを区別するパラメータを表す。
【0058】
そして、隣接していないと判定した場合にはステップS71に進む。一方、ステップS73においてCPU36は、隣接する領域Rxyzt+1mが存在すると判定した場合にはステップS70に進むみ、CPU36は、この情報を経路情報として第3メモリに記憶した後、次のステップS71に進む。
【0059】
一方、ステップS66において隣接する領域Rxyzt-1jが存在すると判定した場合には、ステップS68に進み、CPU36は、さらに第2メモリに、領域Rxyztkに隣接する領域Rxyzt+1mが存在するか否かの判定を行う。ここで、mは時刻t+1の場合における領域Rxyzt+1が複数存在する場合、それらを区別するパラメータを表す。
【0060】
そして、隣接していないと判定した場合には、次のステップS69においてCPU36は、その情報を新たな経路情報として第3メモリに記憶した後、ステップS67の処理を経てステップS66に戻る。
一方、ステップS68においてCPU36は、隣接する領域Rxyzt+1mが存在すると判定した場合には、ステップS70に進み、CPU36は、この情報を経路情報として第3メモリに記憶した後、次のステップS71に進む。
そして、ステップS71においてCPU36は、k<Nkの条件を満たすかの判定を行い、この条件を満たす場合にはステップS67を経てステップS66に戻る。
一方、k<Nkの条件を満たさないと判定した場合には次のステップS72に進み、CPU36は、さらに2<tの条件を満たすか否かの判定を行う。そして、この条件を満たす場合にはステップS64を経てステップS62に戻る。
そして、1つ前の時刻t−1に設定して同様の処理を繰り返す。このようにして、時刻tが最初の時刻t=1になった場合にはこの処理を終了する。
このような処理を行うことにより、第3メモリには例えば図19に示すような経路情報が記憶される。図19においては、各行で記載された領域が最も多い行を抽出し、領域を各時刻として接続(連結)したものがカプセル型内視鏡3の時間的な経路、つまり軌跡となる。
この他に以下のようにして経路(軌跡)を算出しても良い。
隣接する領域が複数存在する場合、各領域内に含まれる推定位置のコスト値(測定値と計算値の残差の2乗和等)の最小値を求め、抽出した領域のコスト値が最小の領域を接続領域とする。
各領域のコスト値が最小の推定位置の情報を、抽出された領域と接続情報とともに記録する。経路に含まれる領域の数により経路の順位付けを行い、上位いくつかの経路に対して経路全体の距離を求め、経路全体の距離が最小となる経路を軌跡として求める。また、コスト値の総和が最小となる経路を求め、それを軌跡としてもよい。
本実施例は以下の効果を有する。
本実施例は領域を設定することによって、推定する位置の数が少なくなり、実施例1よりも高速に経路の探索ができる。その他は、実施例1と同様に精度よく、カプセル型内視鏡3の位置及び軌跡を推定できる。
【実施例3】
【0061】
次に本発明の実施例3を説明する。本実施例の構成は実施例1と同様であり、軌跡推定部のプログラムの処理内容が異なる。本実施例では、以下に説明するように、ダイクストラ法で軌跡推定の処理を行う。
次に本実施例の作用を説明する。推定位置または領域と接続情報を求め、記録するまでは、実施例1或いは2と同様である。本実施例では、経路を決定する手法としてダイクストラ法を適用する。このダイクストラ法は、例えば非特許文献1に記載されている。
このダイクストラ法においては、例えば実施例1において時刻t=1からtendまでにおいて隣接する時刻t、t−1でそれぞれ推定された各位置をノードとしてそれらをラインLで結ぶ複数の経路を設定する。
【0062】
そして、それらにおけるラインLの長さ等に対して適当に重み付けを行い(勿論、1のように同じ重み付けでもよい)、可能となる全ての経路に対してそれぞれ途中の経路の値を加算した累積値(コスト値)が最小となるものを最終的な経路、つまり軌跡とする。
本実施例では、位置が推定された場合、それらに対してコスト値を算出して、比較する処理を行えば、最終的な経路を算出することができる。このため、以下の効果を有する。
ダイクストラ法を用いることにより、実施例1または実施例2よりも高速に経路の探索が出来る。
【実施例4】
【0063】
次に本発明の実施例4を説明する。本実施例の構成は実施例1と同様であり、軌跡推定部のプログラムの処理内容が異なる。
本実施例の作用としては、始点から終点までの経路が途中で切れた場合には、一方の経路の終点と他方の経路の始点との距離が最小になるように経路を接続する。
本実施例の効果として、経路が途中で途切れた場合でも始点から終点まで経路を探索することができる。
【実施例5】
【0064】
次に本発明の実施例5を説明する。本実施例の構成は実施例1と同様であり、軌跡推定部のプログラムの処理内容が異なる。
本実施例の作用としては、生体の部位に関する先見情報から推定位置/領域を拘束する。例えば、食道のような部位では、カプセル型内視鏡3が口から胃にほぼ直線的に移動すると考えられることから、推定される位置をほぼ予測でき、予測される範囲外で推定された位置は、処理の対象から外すようにする。
また、カプセル型内視鏡の移動方向(口から胃へ向かう方向)を予測できることから、推定位置または領域を接続する場合も、胃から口に向かう方向に接続するものは処理対象から除外する。
本実施例の効果として、高速に経路の探索ができる。
【実施例6】
【0065】
次に本発明の実施例6を説明する。本実施例の構成は実施例1と同様であり、軌跡推定部のプログラムの処理内容が異なる。
次に本実施例の作用を説明する。
受信するアンテナ11の個数、配置位置、アンテナ23の位置(xwg,ywg,zwg)(0)の初期値の与え方、ノイズ等によってカプセル型内視鏡3の位置が複数推定される。体腔内において画像を撮像する間隔が短時間でカプセル型内視鏡3の動きが比較的小さい為、特定の時刻に推定されたカプセル型内視鏡3の位置と時間的に前後する時刻に推定されたカプセル型内視鏡3の位置は、ほぼ同一位置または近接した位置として求められると考えられる。
【0066】
従って時間的に前後する時刻に推定された複数のカプセル型内視鏡3の位置を距離や推定時のコスト値等を条件として各時刻で推定されたカプセル型内視鏡3の位置を接続し、全体的な接続状態から各時刻のカプセル型内視鏡3の位置を求める。
図8に示したように時刻t−1に推定された位置をP(t-1)j (j=1,2,…、Nj)、時刻tに推定された位置をPti (i=1,2,…,Ni) とする。時刻t−1、時刻tで推定された位置P(t-1)j、Ptiに対して評価関数h(t-1)j,tiを以下のように設定する。
h(t-1)j,ti=d(t-1)j,ti+w(cost(t-1)j+ costti)
d(t-1)j,ti=[(Pxti−Px(t-1)j)2+(Pyti−Py(t-1)j)2+(Pzti−Pz(t-1)j)2]1/2 .
ただし、d(t-1)j,tiは各推定された位置の距離、cost(t-1)j、costtiは位置を推定するときに得られるコスト値、wは重み係数で、このwは、例えば距離3cmと位置推定時の最小コストcostminの3倍の値によって求める。
【0067】
つまり、
w=0.03/(3costmin)
としている。時刻t−1、時刻tで推定された位置P(t-1)j、Ptiの全ての組合せに対して評価関数の値を求める。そして、評価関数の値の小さい順に並べ、その場合の最も小さい値のものから上位いくつかを抽出して、記憶する。
例えば、評価関数に対して閾値を評定し、評価関数の値が閾値以上の場合、接続情報と評価関数の値は記憶しない。また、2点間の距離が大きい場合、例えば、5cm以上となる場合には評価関数の算出を中止し、接続情報等の記憶を行わない。
最後に、接続情報と共に記憶されたカプセル型内視鏡3の位置を始点として、接続情報に従って各時刻の推定位置を接続し、評価関数の値の合計を算出する。接続が最も長いルートを抽出することにより各時刻のカプセル型内視鏡3の位置として軌跡を求める。
【0068】
また、ルートが複数求められた場合、評価関数の合計の小さいルートから各時刻のカプセル型内視鏡3の位置を推定する。ルートが全て途中で切れた場合(評価関数が全て閾値以上、又は距離が5cm以上等)は、切れた時刻を始点にして前記同様の処理を行い、切れた部分間の接続は実施例4と同様に一方の経路の終点と他方の始点との距離が最短になるように接続する。
【0069】
時刻t−1、時刻tで推定された位置P(t-1)j、Ptiの全ての組合せに対して評価関数の値を求める。そして、評価関数の値の小さい順に並べ、その場合の最も小さい値のものから上位いくつかを抽出して、記憶する。
例えば、評価関数に対して閾値を評定し、評価関数の値が閾値以上の場合、接続情報と評価関数の値は記憶しない。また、2点間の距離が大きい場合、例えば、5cm以上となる場合には評価関数の算出を中止し、接続情報等の記憶を行わない。
本実施例は以下の効果を有する。
受信するアンテナ11の個数、配置位置、アンテナ23の初期の位置(xwg,ywg,zwg)(0)の与え方、ノイズ等によってカプセル型内視鏡3の位置が複数推定された場合でもカプセル型内視鏡3の位置を一意に決定できる。また、2点間の距離、コスト値を用いて評価関数を設定している為、この評価関数により正確なカプセル型内視鏡3の位置を推定できる。
【実施例7】
【0070】
次に本発明の実施例7を説明する。本実施例の構成は実施例1と同様であり、軌跡推定部の処理内容が異なる。
次に本実施例の作用を説明する。
上述したように図13(B)は、カプセル型内視鏡3が存在する空間を複数の領域Rxyz(x=1,2,3…、y=1,2,3,…、z=1,2,3,…)に分割した状態を示す。
また、図14は時刻t−1、時刻tで得られたアンテナ11の複数の出力値からカプセル型内視鏡3の推定された各位置p(t-1)j(j=1,2,3,…)、Pti(i=1,2,3,…)を示す。
【0071】
時刻tにおいて推定された位置Pti(i=1,2,3,…)が含まれる領域Rxyzを求める。また、時刻t−1で得られた領域と接続する場合、以下の評価関数を算出する。
h(t-1)j,ti=d(t-1)j,ti+w1(cost(t-1)j+ costti + w2/(nQlmn、+ nQlm+1n)
d(t-1)j,ti=[(Qxlmn−Qxlm+ln)2+(Qylmn−Qylm+ln)2+(Qzlmn−Qzlm+ln)2]1/2 .
ただし、d(t-1)j,tiは各推定された位置が含まれる領域Rxyzの重心位置Qt-1,Qttの距離、cost(t-1)j、costtiは位置を推定するときに得られるコスト値、w1,w2は重み係数で、例えば、w1は距離3cmと位置推定時の最小コストの3倍の値によって求められ、w2は分割した領域の数と各領域に含まれる推定位置の数(nQlmn、nQlm+1n)によって求められる。
【0072】
つまり、
w1=0.03/(3costmin)
w2=1000.0
上記評価関数によって抽出された時刻t−1と時刻tの推定位置の接続関係を分割された領域間で決定する。接続は隣接する領域間の移動のみとし、隣接する領域が複数存在する場合は領域内に含まれる推定位置の数が多い領域を接続領域とする。図15は時刻tに得られた領域から時刻t−1の接続の状態を示す。時刻tで得られた領域と時刻t−1に接続される領域の情報を記録する。記録された全てのデータに対して抽出された領域と接続情報を記録する。
【0073】
実施例2と同様に最後に記憶された領域を始点、最初に記憶された領域を終点とし、抽出された領域とともに記憶された接続情報を用いて始点から終点までの経路を求める。得られた経路に含まれる領域の数が最大となる経路を求め、得られた経路から各時刻の推定位置を決定する。この場合の推定位置は、領域の中心位置(重心位置)とする。
【0074】
隣接する領域が複数存在する場合、各領域内に含まれる推定位置のコスト値(測定値の計算値の残差の2乗和等)の最小値を求め、抽出した領域のコスト値が最小の領域を接続領域とする。
【0075】
各領域のコスト値が最小の推定位置の情報を抽出された領域と接続情報とともに記録する。経路に含まれる領域の数により経路の順位付けを行い、上位いくつかの経路に対して経路全体の距離を求め、経路全体の距離が最小となる経路を求める。また、コスト値の総和が最小となる経路を求めてもよい。
本実施例は以下の効果を有する。
領域を設定することにより推定位置の数が少なくなり、実施例1よりも高速に経路の探索ができる。
【0076】
なお、上述した各実施例等において、推定されたアンテナ23(或いはカプセル型内視鏡3)の位置の他に、向きの情報を用いて軌跡を算出する処理に利用しても良い。このように向きの情報も用いると、位置のみの場合よりも精度が高い或いは信頼性が高い軌跡及び位置の算出が可能となる。
なお、上述した各実施例において、異なる実施例を部分的に組み合わせる等して構成される実施例も本発明に属する。また、本発明の要旨を変更することなく、一部を変形したものも本発明に属する。
なお、上述した例では、生体内での生体情報として、体腔内を光学的に撮像した画像情報を取得する場合で説明したが、本発明はこれに限定されるものでなく、例えばpHセンサを設けてpHを算出するようなカプセル型医療装置にも適用できる。この他に、薬液とその薬液を散布する手段を設けて医療行為を行えるようにしても良い。
【0077】
[付記]
1.請求項6において、前記複数の経路の長さが最小となるものを算出する場合、ダイクストラ法で算出する。
2.請求項8において、前記評価関数における前記推定情報は、前記2つの位置を推定する際に得られるコスト値(測定値と計算値の残差の2乗和)である。
3.請求項8において、前記評価関数は、前記推定情報としてコスト値を重み付け係数で重み付けしたものを用いた。
4.請求項9において、前記判定手段は、前記2つの位置間の距離が前記条件として所定値以下を満たすか否かにより判定する。
5.請求項9において、前記算出手段は、前記接続関係にあると判定された位置のみに対して始点となる時刻から終点となる時刻までに得られる2点間の距離の総和を求め、前記総和が最小となるものを前記軌跡として算出する。
【産業上の利用可能性】
【0078】
口から飲み込まれることにより体内を撮像等して生体情報を取得するカプセル型医療装置において、内部に設けたアンテナから電磁波で体外に信号を送信し、その信号を体外に設けた複数のアンテナを用いて受信することにより、生体情報を取得した体内での位置を推定し、複数の位置が推定された場合にもさらに所定の条件を満たすものを抽出する等することにより、信頼性が高い軌跡と位置を算出して、診断に有効利用できるようにしている。
【図面の簡単な説明】
【0079】
【図1】本発明の実施例1のカプセル型内視鏡装置等の構成を示す図。
【図2】カプセル型内視鏡の内部構成を示す概略の断面図。
【図3】アンテナユニットを構成する複数のアンテナの配置例とそのアンテナに設定した座標系を示す図。
【図4】カプセル型内視鏡と体外装置における送受信する電気系の構成を示すブロック図。
【図5】カプセル型内視鏡から無線で送信する画像信号等を示す説明図。
【図6】カプセル型内視鏡の円形コイルによるアンテナによる任意の位置Pにおける電磁界等の成分を示す図。
【図7】図6のアンテナが発生した電界をアンテナユニットの棒状のアンテナで受けたとき検出される起電力を示す図。
【図8】経時的に隣接する時刻で推定された位置を示す図。
【図9】隣接する時刻で推定された位置が予め設定された半径rの球内にあるか否かの様子を示す図。
【図10】隣接する時刻で推定された位置により軌跡を構成する経路の候補となる接続関係を決定する処理のフローチャート図。
【図11】図10の処理後に、軌跡を算出する処理内容を示すフローチャート図。
【図12】カプセル型内視鏡により撮像された画像を算出された軌跡を形成する位置と共に表示する表示例を示す図。
【図13】本発明の実施例2における生体に設定した座標系及び生体を複数に分割した小領域を示す図。
【図14】隣接する時刻で推定された位置と小領域との関係を示す図。
【図15】隣接する時刻において推定された複数の位置から軌跡を算出する候補となる接続関係を決定する様子を示す図。
【図16】隣接する時刻において推定された複数の位置から軌跡を算出する候補となる接続関係を決定する処理内容のフローチャート図。
【図17】図16の処理により第2メモリに記憶される2次元配列の情報を示す図。
【図18】図16の処理後に軌跡を算出する処理内容のフローチャート図。
【図19】図18の処理により第3メモリに記憶される2次元配列の情報を示す図。
【符号の説明】
【0080】
1…カプセル型内視鏡装置
2…患者
3…カプセル型内視鏡
4…アンテナユニット
5…体外装置
11…アンテナ
12…液晶モニタ
15…対物レンズ
17…CCDイメージャ
20…送受信回路
23…アンテナ
33…送受信回路
35…メモリ
36…CPU
36a…アンテナ位置&向き推定部
36b…軌跡推定部
【特許請求の範囲】
【請求項1】
生体内に挿入され、アンテナを備えたカプセル型体内装置と、
前記カプセル型体内装置のアンテナから電磁波の信号を無線で送信する無線送信手段と、
前記生体外に配置される複数の体外アンテナと、
前記複数の体外アンテナによって受信した時刻における前記電磁波の信号から前記アンテナ若しくはカプセル型体内装置の位置を推定する推定手段と、
前記推定手段により推定された互いに異なる時刻の位置のものが複数推定された場合に対して設定される条件に従って前記カプセル型体内装置の移動した軌跡を算出する軌跡算出手段と、
を具備したことを特徴とするカプセル型医療装置。
【請求項2】
前記推定手段は、前記アンテナの位置と共に前記アンテナの向きを推定し、前記推定手段により推定された位置及び向きの推定値を、実際に検出される検出値と比較し、その比較した値から算出される前記位置及び向きの更新値が所定値以下になるように、前記推定手段による位置及び向きの推定値を補正することを特徴とする請求項1に記載のカプセル型医療装置。
【請求項3】
前記軌跡算出手段は、経時的に隣接する2つの時刻においてそれぞれ推定された2つの位置間の距離が所定値以下のものを前記条件として前記軌跡を算出することを特徴とする請求項1に記載のカプセル型医療装置。
【請求項4】
前記軌跡算出手段は、経時的に最初の時刻で推定された始点となる位置と最終の時刻で推定された終点となる位置との間において、始点と終点との間で推定された各位置を結ぶ複数の経路における所定値以下のものを前記条件として前記軌跡を算出することを特徴とする請求項1に記載のカプセル型医療装置。
【請求項5】
前記軌跡算出手段は、前記カプセル型医療装置が挿入される前記生体を複数の小領域に分割し、経時的に隣接する2つの時刻においてそれぞれ推定された2つの位置が近接した関係の小領域内にあるか否かを前記条件として前記軌跡を算出することを特徴とする請求項1に記載のカプセル型医療装置。
【請求項6】
前記軌跡算出手段は、前記始点と終点との間で推定された各位置を結ぶ複数の経路の長さが最小となるものを前記軌跡として算出することを特徴とする請求項4に記載のカプセル型医療装置。
【請求項7】
前記軌跡算出手段は、前記始点と終点との間で推定された各位置を結ぶ複数の経路に含まれる推定された位置が最大となるものを前記軌跡として算出することを特徴とする請求項4に記載のカプセル型医療装置。
【請求項8】
前記軌跡算出手段は、経時的に隣接して推定された2つの位置に対して、前記2つの位置間の距離情報と、2つの位置を推定する際に得られる推定情報とを含む評価関数を定義し、この評価関数の値が所定値以下となるものを前記条件として、前記軌跡を算出することを特徴とする請求項1に記載のカプセル型医療装置。
【請求項9】
前記軌跡算出手段は、経時的に隣接する2つの時刻においてそれぞれ推定された2つの位置が前記軌跡の候補となる接続関係にある位置となるものを前記条件に従って判定する判定手段と、前記接続関係にある位置と判定された情報を用いて接続関係の経路を調べることにより前記軌跡を算出する算出手段とを有することを特徴とする請求項1に記載のカプセル型医療装置。
【請求項1】
生体内に挿入され、アンテナを備えたカプセル型体内装置と、
前記カプセル型体内装置のアンテナから電磁波の信号を無線で送信する無線送信手段と、
前記生体外に配置される複数の体外アンテナと、
前記複数の体外アンテナによって受信した時刻における前記電磁波の信号から前記アンテナ若しくはカプセル型体内装置の位置を推定する推定手段と、
前記推定手段により推定された互いに異なる時刻の位置のものが複数推定された場合に対して設定される条件に従って前記カプセル型体内装置の移動した軌跡を算出する軌跡算出手段と、
を具備したことを特徴とするカプセル型医療装置。
【請求項2】
前記推定手段は、前記アンテナの位置と共に前記アンテナの向きを推定し、前記推定手段により推定された位置及び向きの推定値を、実際に検出される検出値と比較し、その比較した値から算出される前記位置及び向きの更新値が所定値以下になるように、前記推定手段による位置及び向きの推定値を補正することを特徴とする請求項1に記載のカプセル型医療装置。
【請求項3】
前記軌跡算出手段は、経時的に隣接する2つの時刻においてそれぞれ推定された2つの位置間の距離が所定値以下のものを前記条件として前記軌跡を算出することを特徴とする請求項1に記載のカプセル型医療装置。
【請求項4】
前記軌跡算出手段は、経時的に最初の時刻で推定された始点となる位置と最終の時刻で推定された終点となる位置との間において、始点と終点との間で推定された各位置を結ぶ複数の経路における所定値以下のものを前記条件として前記軌跡を算出することを特徴とする請求項1に記載のカプセル型医療装置。
【請求項5】
前記軌跡算出手段は、前記カプセル型医療装置が挿入される前記生体を複数の小領域に分割し、経時的に隣接する2つの時刻においてそれぞれ推定された2つの位置が近接した関係の小領域内にあるか否かを前記条件として前記軌跡を算出することを特徴とする請求項1に記載のカプセル型医療装置。
【請求項6】
前記軌跡算出手段は、前記始点と終点との間で推定された各位置を結ぶ複数の経路の長さが最小となるものを前記軌跡として算出することを特徴とする請求項4に記載のカプセル型医療装置。
【請求項7】
前記軌跡算出手段は、前記始点と終点との間で推定された各位置を結ぶ複数の経路に含まれる推定された位置が最大となるものを前記軌跡として算出することを特徴とする請求項4に記載のカプセル型医療装置。
【請求項8】
前記軌跡算出手段は、経時的に隣接して推定された2つの位置に対して、前記2つの位置間の距離情報と、2つの位置を推定する際に得られる推定情報とを含む評価関数を定義し、この評価関数の値が所定値以下となるものを前記条件として、前記軌跡を算出することを特徴とする請求項1に記載のカプセル型医療装置。
【請求項9】
前記軌跡算出手段は、経時的に隣接する2つの時刻においてそれぞれ推定された2つの位置が前記軌跡の候補となる接続関係にある位置となるものを前記条件に従って判定する判定手段と、前記接続関係にある位置と判定された情報を用いて接続関係の経路を調べることにより前記軌跡を算出する算出手段とを有することを特徴とする請求項1に記載のカプセル型医療装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2007−283001(P2007−283001A)
【公開日】平成19年11月1日(2007.11.1)
【国際特許分類】
【出願番号】特願2006−115958(P2006−115958)
【出願日】平成18年4月19日(2006.4.19)
【出願人】(304050923)オリンパスメディカルシステムズ株式会社 (1,905)
【Fターム(参考)】
【公開日】平成19年11月1日(2007.11.1)
【国際特許分類】
【出願日】平成18年4月19日(2006.4.19)
【出願人】(304050923)オリンパスメディカルシステムズ株式会社 (1,905)
【Fターム(参考)】
[ Back to top ]