
カメラのための衛星測位
カメラによる写真の捕獲の位置を推定するための衛星信号を受信する方法。この方法は、写真の捕獲のタイミングに関係する信号を受信するステップと、ゼロではない持続時間の間隔にわたり待機するステップと、間隔の後、衛星信号を受信するステップとを含む。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、衛星測位システムに関する。特に本発明は、衛星測位受信機を使用した、写真の「ジオタギング(geo−tagging)」(画像の捕獲の位置を記録すること)に関する。
【背景技術】
【0002】
ジオタギングは、画像およびビデオに注釈を付け編成するための、人気が高まっている方法である。位置メタデータをメディアに追加することにより、ユーザは、例えば地図上に位置を記入(plot)することにより、面白くかつ直観的な方法で画像集を検索し閲覧することができる。
【0003】
そうした注釈を作成するために必要な位置名または地理座標を手動で打ち込む多大な労力を必要とする作業を回避するために、多くのカメラ・ユーザは厳密な位置メタデータを提供するために衛星測位に向かっている。
【0004】
全地球測位システム(GPS)などの衛星測位システムは、受信機が、周回軌道衛星群からの信号の測定された到達時間に基づいて自らの位置を計算することを可能にする。
【0005】
GPS受信機をデジタルカメラに統合することが知られている。この構成を用いると、写真が撮影される度に受信機が位置測定を推定する。その結果生じる推定は、典型的には例えばExif(交換可能画像ファイル:Exchangeable Image File)メタデータの一部として画像ファイルに追加される。
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、この構成での問題は、カメラ・サブシステム内の電子機器が、衛星からの信号をGPS受信機によりはっきりと受信することを乱す、電磁(EM)干渉を引き起こすことがあることである。カメラの電子機器によって作り出されるノイズは、位置測定を達成することをより困難にしもしくは不可能にすることがあり、またはカメラの電子機器によって作り出されるノイズは、位置測定の結果の精度を単純に下げることがある。
【課題を解決するための手段】
【0007】
本発明の態様によれば、カメラによる第1の写真の捕獲の位置を推定するための衛星信号を受信する方法が提供され、この方法は、第1の写真の捕獲のタイミングに関係する信号を受信するステップと、ゼロではない持続時間の間隔にわたり待機するステップと、間隔の後、衛星信号を受信するステップとを含む。
【0008】
位置を決定するために、写真を撮影することとGPS信号を標本化することとの間にゼロを上回る遅延またはオフセットを導入することにより、この方法は、GPS受信に関する、カメラの電子機器による干渉を低減する。この方法は、写真の捕獲のタイミングに関係する単一のトリガ信号、例えば「シャッター・リリース」ボタンを押すこと、だけの可用性に依拠する。遅延は、カメラがEM干渉を作り出している期間の持続時間に相当する。したがって、カメラからは(例えば画像の捕獲を完了したことを指示するための)追加の信号は不要である。追加の信号が不要であることは、GPSとカメラ・サブシステムとの間の相互接続または通信インターフェイスの複雑さを最小限に抑えることにより、GPSおよびカメラ・サブシステムが設計において単純かつモジュラー式であることを可能にする。
【0009】
一部の実施形態では、間隔の持続時間は所定の遅延を有する。
【0010】
好ましくは、持続時間は手動で調節することができる。
【0011】
持続時間を手動で調節することができることは、柔軟性を保証する。遅延を手動で構成することは、GPS受信機が使用される状況に応じてGPS受信機がカスタマイズされてよいことを意味する。外付けのGPS受信機では、手動調節はユーザによるものでよい。組み込まれるGPS受信機では、カスタマイズは、サードパーティーのGPS受信機を使用してカメラが組み立てられるときに工場内で行われてよい。
【0012】
持続時間は、カメラのパラメータに基づいて決定されてよい。
【0013】
異なるカメラは様々な量の干渉を作り出し、シャッターが切られた後の様々な持続時間にわたり様々な量の干渉を作り出す。すべてのカメラのGPS受信のタイミング遅延を最小限に抑えるために、型式、モデル、捕獲モード、より詳細な情報などの、カメラのパラメータに基づいて遅延を選択しまたは計算することが有利な場合がある。
【0014】
持続時間は、カメラから受け取られるパラメータに基づいて自動的に決定されてよい。
【0015】
カメラが、自らに関する情報を伝送することができる場合、GPSタイミング遅延のカスタマイズは自動的に達成されてよい。カスタマイズが自動的に達成されることは、(例として)手動でカスタマイズすること、またはカメラ・モデルのパラメータをGPS受信機にユーザが入力することの必要性を回避する。カスタマイズが自動的に達成されることは、個々の写真に関連するカメラ・パラメータに基づく、より洗練された遅延の調節も可能にすることができる。例えば、カメラのモード(とりわけフラッシュ/フラッシュなし、圧縮ファイル/非圧縮ファイル、解像度)は、持続時間、および捕獲中に生み出されるノイズの量に影響を与えることがある。
【0016】
この方法は、写真の捕獲に関連する電磁干渉を測定するステップをさらに含んでよく、測定される干渉に基づいて間隔の持続時間は決定される。
【0017】
カメラが自らのパラメータを伝送することの代わりとして、またはそれに加え、適切な遅延持続時間を推論するために、特定のカメラによって生み出される実際の干渉が測定され解析されてよい。この直接測定は、不正確な予測、またはカメラ・モデルのパラメータを干渉期間および適切な遅延に関連付けるデータベースを維持する必要性を回避することができる。
【0018】
干渉を測定することによって決定される持続時間は、現在の写真のための遅延を設定するために使用されてよく、または後続の写真のための遅延を設定するために使用されてよいことに留意されたい。第1の代替策は、優勢な干渉条件にシステムが「リアルタイム」で適応するよう、写真ごとに遅延持続時間を動的に設定するものである。第2の代替策は、必要な場合に「オフライン」解析を可能にし、つまり、ある写真から決定される遅延持続時間が、他の後の写真のための遅延を設定するために使用される。したがって、干渉を測定する際に使用される写真は、写真であって、その写真を用いてその後遅延が適用される、写真と同じでよくまたは異なってもよい。
【0019】
電磁干渉を測定するステップは、受信されるIF信号の標本のシーケンスに対してフーリエ変換を行うこと、および受信されるIF信号の標本のシーケンスを、対象となっている周波数において生成される信号の標本と混合することのうちの一方または両方を含んでよい。
【0020】
間隔の持続時間は、干渉の水準を繰り返しまたは継続的に測定することによって決定されてよく、間隔は、測定される干渉の水準が閾値を下回るとすぐに終了する。
【0021】
この閾値は、少なくとも1枚の以前の写真の捕獲に対応する、前に測定された干渉の水準に基づいて選択されてよい。
【0022】
持続時間は、衛星信号を受信するステップが、写真の捕獲に関連する電磁干渉の予期される減退の後できるだけ早く実行されるよう、選択されてよい。
【0023】
あらゆる場合において、遅延はできるだけ短時間にとどめることが有益である。画像を捕獲した後の遅延が長ければ長いほど、(写真が撮影された位置からカメラが移動していることがあるため)位置推定の誤差はより大きくなる。また、カメラが(例えばポケット、鞄、または車の中に)しまわれ、そのため衛星信号を受信することがより困難になる恐れがある。例として、遅延は0.1秒から10秒の間、より好ましくは0.5秒から5秒の間でよい。
【0024】
衛星信号を受信するステップは、所定の回数繰り返されてよい。
【0025】
所定の回数繰り返されてよいことは、位置測定が少なくとも1回は成功する可能性を高める。
【0026】
この方法は、間隔の間、追加の写真の捕獲のタイミングに関係するさらなる信号を受信するステップと、それに応じて間隔の持続時間を調節するステップとをさらに含んでよい。
【0027】
最初の写真のすぐ後にもう1枚の写真が撮影される場合、カメラの電子機器からのEM干渉の途切れはほとんどない、またはないことがある。したがって、GPS信号の受信は再スケジュールされるべきである。例えば、遅延を制御するタイマーがリセットされてよい。
【0028】
持続時間を調節するステップは、間隔の持続時間を所定の量だけ長くすることを含んでよい。
【0029】
捕獲される写真の数が増えるとき、干渉を回避するために必要な遅延は累積的(cumulative)でよい。したがって、(例えば)その後シャッターが切られるときにタイマーを単純に再始動させることは、干渉を減らすには十分ではないことがある。
【0030】
この方法は、捕獲の位置を推定するための後の処理を可能にするよう、受信した衛星信号をメモリに記憶するステップをさらに含んでよい。
【0031】
標本を記憶することは、位置測定を導き出すための即時(リアルタイム)処理の代替策である。この「捕獲してその後処理する」手法は、GPS受信機が単純化されること、およびより少ない電力を消費することも可能にする。衛星信号の標本を遅延して捕獲することは、位置測定が可能であるという信頼性を高めることを与えるため、本発明は標本を、それらの標本を完全には処理せずより安全に記憶する。つまり本発明は、捕獲してその後処理するGPS受信機にとって特定の利益を有し、その理由は、この種の受信機は捕獲時の干渉にさもなければ気付かないからである。リアルタイムGPS受信機では、干渉の対価は、衛星信号を受信し、位置測定を計算するための、再三の試みによって消費される余分な電力であり得る。しかし、捕獲して処理する(capture−and−process)受信機では、干渉は位置測定を計算する能力を完全に使えなくすることがある。本発明の別の態様によれば、受信機器が関連するカメラのパラメータを受信することと、受信したパラメータに基づいて、カメラによる写真の捕獲に関連する電磁干渉の期間の持続時間を自動的に決定することと、決定した持続時間を受信機器に伝送することとを含む、衛星信号受信機器を構成する方法が提供される。
【0032】
これは、上記の前の方法における遅延持続時間を自動的に構成する方法である。カメラのパラメータは自動的に受信され、対応する正しい遅延がGPS受信装置に自動的にダウンロードされる。この方法は、ユーザの対話が一切なしに、最適な遅延を構成することを可能にする。この方法は、受信機がカメラに接続されるときの、(上記に述べた)受信機による自動自己較正の代替策でもよい。上記に述べた手法に比べ、この方法は、遅延およびカメラ・パラメータのデータベースを記憶するための、受信装置の負担を除去することができる。
【0033】
本発明のさらに別の態様によれば、先に上述した方法のうちの1つを実行するようにされた衛星信号受信機器であって、写真の捕獲のタイミングに関係する信号を受信するための受信手段と、衛星信号を受信するための受信手段とを備える、衛星信号受信機器が提供される。
【0034】
次に本発明は、添付図面を参照して例として記載される。
【図面の簡単な説明】
【0035】
【図1】本発明の実施形態に従って動作するGPS受信機およびカメラの図である。
【図2】本発明の実施形態に従ってGPS受信機が構成されてよい方法を示す図である。
【図3】本発明の実施形態に従って衛星信号を受信する方法を示す流れ図である。
【図4】別の態様の実施形態に従って衛星信号受信機を構成する方法の流れ図である。
【図5】遅延の持続時間が動的に決定される実施形態に従って衛星信号を受信する方法を示す流れ図である。
【図6】図5の方法の一実施形態によるGPS受信機のさらなる詳細を示す図である。
【図7】図5の方法の別の関係する実施形態によるGPS受信機を示す図である。
【発明を実施するための形態】
【0036】
GPS受信機は、画像が撮影された場所に対応する位置メタデータに写真がタグ付けされることを可能にするために、カメラと組み合わせられてよい。この組合せは、GPSサブシステムをカメラの中に内部的に統合することにより、または外付けのGPS装置を従来のカメラに接続することにより達成されてよい。後者の接続は、外付けフラッシュなどの装置を接続するために従来より使用されてきたカメラ・ホットシューによるものとすることができる。したがって従来のホットシューは、(フラッシュが同期することを可能にするために)シャッターを切ることに対応するトリガ信号を既に提供している。位置をタグ付けするようGPS受信機をトリガするために、全く同じトリガ信号が使用されてよい。
【0037】
GPS受信機は、標準的な「リアルタイム」GPS、または最近開発された捕獲してその後処理する(本明細書では以下、「捕獲して処理する」)タイプのGPS受信機でよい。この後者のタイプのGPSは、GPS信号を受信する動作と、位置を導き出すためにそのGPS信号を処理する動作とを分ける。基本的手法は、写真が撮影されるときに、処理されていないGPS中間周波数(IF)データの短い(例えば200ミリ秒の)バーストを捕獲することである。処理は後で行われ、別個の装置(例えば、写真および標本をアップロードした後のパーソナル・コンピュータ)上でよい。したがって、捕獲して処理するシナリオでは、捕獲される信号の標本の完全性をできる限り保証することが特に重要であり、捕獲される信号が破損し、またはない場合、(リアルタイムGPSの場合ならそうだろうが)良好な信号を再捕獲する機会はない。
【0038】
本発明者らは、シャッターを切ることによってトリガされる捕獲は多くの場合非常にうまく機能するが、一部の現代のカメラは、写真が撮影されるときに多くの電磁干渉を生み出すことを発見した。その後この干渉がGPSアンテナ(および/またはGPSのRF回路)によって受け取られ、記録された生のIFデータの品質を低下させ、場合によっては干渉は位置測定を得られなくし、またはもっとひどい場合はどんなGPS信号も一切検出できなくするのに十分である。
【0039】
GPSモジュールが干渉の影響をより受けなくするために、よく知られているRF設計技法を使用することは可能だが、モジュールは引き続き所望のGPS信号を受信できなければならないため、完全に隔離することは不可能である。同様に、ある者はより少ない干渉を発するようにカメラを再設計することができるが、その再設計することは、多くの場合GPS製造業者には管理できずかつ/またはカメラの設計に対して重大な影響を与える(カメラをより大きくする、またはコストを増加させる)ことになる。
【0040】
本発明は、カメラの電子機器からの干渉を減らすより優れた方法を提供する。その考えは、カメラの電子機器によって引き起こされる干渉が許容水準にまで小さくなった後、GPS IFデータの捕獲ができるだけ早く行われるよう、写真が撮影された後のGPS IFデータの捕獲を遅らせることである。写真を撮影することは、シャッター・リリース・ボタンを押すことによって指示される。一部の実施形態では、遅延は、写真を撮影することの前にあらかじめ定められたプログラム可能な遅延を含み、またはそうしたプログラム可能な遅延から専ら成ってよい。
【0041】
ユーザは写真を撮影することと捕獲が行われることとの間で移動する場合があるので、遅延を加えることは、結果として生じる位置測定の精度を下げることがある。また、写真と捕獲との間にカメラが「しまわれる」ことがあり、記録されるGPS信号の品質を(捕獲中の急速な加速により、またはアンテナが遮蔽されることにより)低下させる恐れがある。したがって、遅延を最小限に抑えることが望ましい。諸実験は、多くの捕獲ではわずか1秒の遅延で十分だが、重要なことには、最適な遅延はカメラごとに異なることを示している。さらに、干渉の大多数は、データ転送であって、その持続時間および速度が種類/モデルに加えカメラの様々なパラメータに依拠する、データ転送によるものであることが分かっている。これらのパラメータは、ユーザが圧縮(JPEG)画像を撮影しているのか、非圧縮(生)画像を撮影しているのか、どの解像度が選択されているのか、内蔵メモリが使用されているのか、外部メモリが使用されているのか、メモリの種類(例えばコンパクト・フラッシュ対セキュア・デジタル)およびそのメモリの書込み速度、ならびに「一時」メモリの中に何枚の写真があるかを含む。
【0042】
遅延される捕獲の手法の利点は、記録された信号の品質に対する損傷が最小限に抑えられてよく、十分に正確な位置を提供する可能性が最大限にされてよいことである。同時に、カメラとGPS受信機との間の対話は単純化され、ノイズを発生させる(つまり干渉を発生させる)カメラの電子機器の活動が終了したことをGPSに信号で伝える必要はない。
【0043】
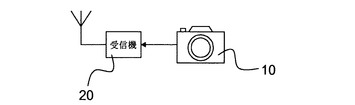
図1は、本発明の方法の一実施形態に従って動作するシステムを示す。カメラ10が、GPS受信機20に接続される。この接続は、カメラ上でシャッターを切る行為に応じて、受信機20がGPS信号の標本を受信(捕獲)するようトリガされることを可能にする。GPS受信機20がリアルタイム受信機の場合、標本が受信された直後に位置測定が計算される。GPS受信機20が捕獲して処理する受信機の場合、標本は記憶される。受信機20は、カメラの筐体に組み込まれて(統合されて)よく、または通信リンクによりカメラ10に接続される別個の外部装置でもよい。このリンクの1つの候補は、カメラ・ホットシューによる接続だが、Bluetoothによる無線接続など、より進化した接続も可能である。
【0044】
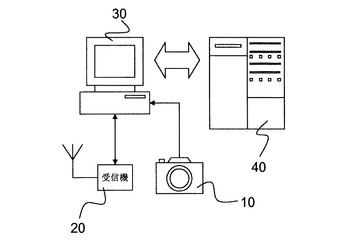
図2は、所与のカメラ10に関して、正しい遅延で構成されているGPS受信機20を示す。カメラ10は、例えばユニバーサル・シリアル・バス(USB)リンクにより、パーソナル・コンピュータ(PC)30に接続される。受信機20も、何らかの適切な接続によって接続される。PC30は、いかなる場合にもパラメータ情報をPCに提供するカメラ10に問い合わせてよい。このパラメータ情報は、カメラのモデルおよび型式、またはそのカメラの画像捕獲仕様に関するより詳細な情報を含んでよい。この情報に基づいて、PC30は、シャッターが切られる事象の後にGPS標本を捕獲するときに、受信機20によって使用されるべき最適な遅延を計算しまたは選択する。次いで、この遅延が受信機20にダウンロードされる。遅延を計算するために、受信機20は、カメラのモデルの一覧表および対応する最適な遅延のデータを保持する中央データベース・サーバ40と連絡を取ってよい。
【0045】
受信機20を構成することは、受信機が初めて新たなカメラ10とともに使用されようとするとき、PC30を使用して行われてよい。受信機20が外付けの付属品の場合、これが当てはまる。この場合、構成することは完全に自動的でよい。例えば、受信機付属品が、その受信機付属品とともに前に使用されていないカメラと同時にPCに接続される場合、ソフトウェアは、受信機20がカメラ10とともに使用されるように構成されるべきかどうかユーザに尋ねることができる。受信機20がカメラ10とともに使用されるように構成されるべきである場合、ソフトウェアは、適切な遅延値を推論しまたは調べるために必要なカメラのパラメータを自動的に決定する。
【0046】
その一方で、受信機がカメラに統合されている場合、構成するステップは、典型的にはカメラが組み立てられるときに工場内で行われる。これは、カメラ製造業者が汎用GPS受信機を購入し、自社のカメラのパラメータについてその汎用GPS受信機を適切にカスタマイズすることができることを意味する。この場合、受信機20は明らかに直接カスタマイズされてよく、カメラに関係するパラメータ情報は既に製造業者に知られているので、カメラに関係するパラメータ情報を調べる必要はない。
【0047】
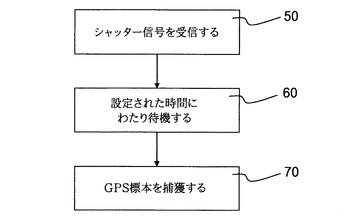
図3は、使用時に受信機20によって実行される方法ステップの例を示す。ステップ50で、シャッターを切る信号がカメラから受信されまたは検出される。この信号は、写真が捕獲されたことを指示する。ステップ60で、受信機は、捕獲のための時間を考慮に入れるために、事前にプログラムされた遅延にわたり休止する。遅延は、画像ファイルをカメラのメモリに記憶することに関連するデータ転送活動のための時間も含むべきである。事前に設定された時間が経過するとき、受信機は、カメラの電子機器からの干渉なしにGPS信号を捕獲する。
【0048】
カメラが速く連続して何枚もの写真を撮影し、最初の写真によって開始される遅延が完了する前に(つまり最初の写真に関連するGPS信号を捕獲する前に)後続の写真が撮影されることは当然起こり得る。そうした状況では、(カメラは後続の写真を撮影するため、カメラが引き続き活動状態にあることにより前の捕獲はかなりの干渉を含むので)それぞれの写真の厳密な固定遅延後に捕獲を行うことが成功する可能性は低い。この問題にうまく対処するために、いくつかの手法が採用されてよい。
【0049】
第1の手法では、後続の写真の通知(シャッター・トリガ)は、単に遅延のカウントダウンを再始動させる。この第1の手法は、シーケンスの最後の写真の後に、通常のプログラムされた遅延を用いて単一の捕獲が行われることをもたらす。例えば遅延が2秒に設定され、写真が時間t、t+0.5秒、およびt+1.5秒に撮影される場合、捕獲はt+1.5+2=t+3.5秒において行われる。
【0050】
第2の代替的手法では、シーケンス内の最後の写真の後に単一の捕獲が取られるが、撮影される新しい写真ごとに遅延タイマーが増加される。この第2の手法は、(一部のカメラの場合のように)干渉が主にデータ転送によって引き起こされ、そのため撮影されるそれぞれの写真が、カメラが行うための一定の追加の作業量を作り出す場合にうまく機能する。結果は、遅延が、最初の写真から計算されるが、別の写真が撮影される度に増えることである。例えば遅延が2秒に設定され、写真が時間t、t+0.5秒、およびt+1.5秒に撮影される場合、捕獲はt+3*2秒=t+6秒において行われる。
【0051】
第3の手法では、遅延をプログラムすることは、写真の連続撮影用の様々な遅延を(ユーザにより、またはデータベースを介して)明示的に設定することを伴う。
【0052】
上記の規則の組合せを含むがこれだけに限定されない、複数の画像を捕獲する場合に遅延を計算するためのより洗練された手法も可能である。
【0053】
本発明の別の改変形態では、撮影される写真ごとに、(異なる遅延において)複数の捕獲が行われる。干渉が可変的でありまたは予測不能な状況では、いくつかの捕獲を有することは、十分に正確な位置を提供する可能性を改善することができ、たとえ1つの捕獲がひどく損傷していても、もう1つの捕獲は損傷していないことがある。さらに、異なる捕獲は、(周波数計画を変更することおよび/またはフィルタのパラメータを変えることなど)RFフロントエンドの様々な設定を使用することができる。
【0054】
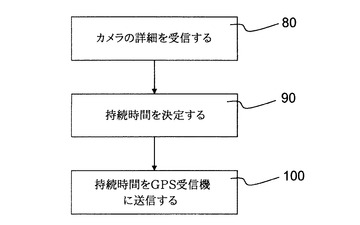
図4は、本発明の態様の実施形態による構成方法を示す。ステップ80で、カメラのパラメータが(例えばPC30によって)受信される。ステップ90で、GPS遅延の正しい持続時間が決定され、ステップ100で、この情報がGPS受信機にダウンロードされる。
【0055】
この基本プロセスについては、多くの改変形態が可能である。GPS受信機20がカメラ10との通信インターフェイスを直接有する場合、PC30は不要でよい。この場合、受信機20はカメラから直接パラメータを受け取り、自ら最適な遅延持続時間を計算し、計算した最適な遅延持続時間を次に写真が撮影されるときに使用してよい。カメラ10からGPS受信機20へのこの直接通信の1つの利点は、パラメータがより頻繁に、例えばカメラのユーザが別のモードを選択するときに送られてよいことである。上で述べたように、カメラによって生み出される干渉は、画像の解像度やJPEGファイルが記憶されるのか、生ファイルが記憶されるのかなどの要素によって決まる。受信機20がこの情報を得ることができる場合、遅延は大幅に最適化されることがある。写真のパラメータに基づく最適化の別の例は、方向に応じて(すなわち縦長モードと横長モードとの間で)遅延を適応させることである。カメラ内の固定されたGPSアンテナは、「誤った」方向でより非効果的に衛星信号を受信する可能性が高く、したがって、縦長の写真が撮影されるとき、信号を受信しようと試みる前に、カメラがその通常(横長)方向に戻されるための時間を考慮に入れるために、より長い遅延を有することが有益な場合がある。
【0056】
必然的にそうした構成は、別の方法で使用されるよりも(単純な事例では唯一の信号はシャッター/トリガである)、カメラと受信機との間により洗練されたインターフェイスを必要とする。しかし、内蔵GPSでは、カメラの電子機器とのインターフェイスの定義において少なくとも多少の柔軟性がある。外付けのGPS付属品でさえ、十分に進化したインターフェイスが既に存在する。これらのインターフェイスは、カメラのパラメータを外付けのフラッシュ装置に渡すように既に設計されている、Bluetoothなどの無線接続およびインテリジェント・ホットシューなどの有線接続を含む。
【0057】
PC30および/またはサーバ40が構成方法から省かれる場合、カメラのデータベースをGPS受信機のメモリに記憶することが必要な場合がある。カメラのデータベースをGPS受信機のメモリに記憶することは、所与のカメラが接続されるとき、所与のカメラの型式およびモデルについて、正しい持続時間が決定されることを可能にする。カメラおよび持続時間についての小さい一覧表でさえ記憶することは、ユーザが手動でGPS付属品を再構成する必要なしに、GPS付属品が様々なカメラとともに使用されることを可能にする。
【0058】
GPS受信機の中に格納されようがPC上に格納されまいが、どんなデータベースも、不完全でありまたは古い情報を含むことがある。受信機付属品では、このデータベースは望まれないメモリ負担をもたらすこともある。したがって代替策として、本発明は、遅延持続時間を導き出すために使用されるべき干渉の直接測定値も提供する。構成方法についてのこの改変形態では、GPS受信機が写真の捕獲に関連する干渉を決定するための試みを行う。例えば、受信機は、「テスト」写真が撮影されている間に、比較的長い連続的なGPS信号データのストリームを受信してよく、次いで、カメラの電子機器からの干渉の持続時間および重大度を評価するためにこのデータは処理されてよい。処理は、GPS受信機内で、または(特に捕獲して処理する付属品の場合は)アップロードされた後にPC上で実行されてよい。どんな場合でも、試みで観測された干渉が解析されると、適切な遅延持続時間が後続の写真のために設定されてよい。試みは、GPS受信機を最初に使用するときに、または新たなカメラが使用される/検出される度に行われてよい。
【0059】
GPS受信機をカスタマイズすることはできる限り自動化することが有益だが、手動の「オーバーライド」が必要な状況もあり得る。したがって、好ましくは、捕獲遅延の持続時間を手動で調節することが可能である。手動で調節できることは、未知のカメラ(つまり通常のデータベース内に列挙されていないカメラ)が接続されるときに、ユーザがGPS受信機をプログラムすることを可能にする。手動で調節できることは、カメラから受信機へのモード情報を伝達するためのインターフェイスが利用できない場合にさえ、写真の捕獲のモードに応じて遅延を調節することを可能にもする。直接的な手動構成は、多数のカメラの中に標準的なGPS受信機を組み込むカメラ製造業者にとっても普通になる。
【0060】
上記に記載された実施形態では、遅延の持続時間は、写真が捕獲される前(つまりシャッターが切られる信号を受け取る前)に決定される。この場合、遅延の持続時間は、写真の捕獲に関してあらかじめ定められている。しかし他の実施形態では、写真が撮影された後に、持続時間を優勢な条件に動的に適応させることが可能である。したがって遅延は、所与の写真が撮影された後に実際に検出される干渉に基づいて決定される、持続時間が変えられる遅延を含み、またはそうした遅延から専ら成ってよい。この場合、遅延の持続時間は、衛星測位信号を受信することに関して依然としてあらかじめ定められているが、シャッターを切ることまたは写真を捕獲することに関してはもはやあらかじめ定められていない。
【0061】
次に、そうした1つの実施形態が例として、および図5〜図7を参照して記載される。
【0062】
この実施形態では、ステップ50でカメラ・ホットシューによりトリガすると、受信機20の中の(RFフロントエンドとしても知られる)GPS無線機100、110、120がイネーブルにされ、ダウンコンバートされた(IF)信号の標本を作成し始める。ステップ62で、このデータの約1ミリ秒相当がGPS受信機20の内蔵メモリ130に記憶される。ステップ64で、干渉の水準を評価するためにこのデータが解析される。この例では、最初の捕獲の1ミリ秒の持続時間は、位置測定を導き出すための完全な処理を可能にするには短すぎる。むしろその意図は、干渉の推定をすぐに得ることである。ステップ66で、干渉が許容閾値を上回ることが検出される場合、受信機は短い期間、典型的には1ミリ秒〜10ミリ秒程度にわたり待機し(ステップ68)、さらに最初の捕獲を繰り返す。最初の捕獲の標本内で検出される干渉が閾値を下回るまでプロセスは繰り返される。検出される干渉が閾値を下回ることが起こるとき、位置計算で使用されるべきGPS信号の標本のバーストを捕獲することが無難である。したがって、この方法は、前の実施形態にあるようにステップ70に進む。
【0063】
この手法は、ステップ70の、結果として生じる「完全な」GPS捕獲の信頼性が高められる、先に述べた利点を有する。この手法はさらに、干渉を検出するために使用される標本化62および試験64が最小限に抑えられてよいので、エネルギー効率が比較的よい。この手法は、例えば少なくとも1つのバーストが成功裏の位置測定につながることを期待して、GPSデータの「完全な」200ミリ秒のバーストを繰り返し捕獲するよりも効率的である。リソースを効率的に使用することは、携帯型装置の電池寿命を延ばすことに寄与することができる。
【0064】
この方法は、リアルタイムGPS受信機、および捕獲して後で処理する受信機の両方に有益であることに留意されたい。前者の場合、GPS IF信号の標本を完全に処理する多大な計算を必要とするステップは、そのステップが成功する可能性が高くなるまで遅延される。したがって、労力およびエネルギーが潜在的に節約される。捕獲して処理するシステムでは、記憶されるGPS信号の標本の信頼性が高められる点に利益がある。
【0065】
ステップ64では、1ミリ秒の最初のGPS捕獲における干渉の水準を推定するために、様々な技法が使用されてよい。1つの手法は、例えば高速フーリエ変換(FFT)を使用して、周波数領域解析を行うことである。256点のFFTは、5MHz近辺の典型的な標本率を仮定し、1点当たり約20KHzのノイズ帯域幅を与える。この標本率では、1ミリ秒の捕獲は約5000個のデータ標本を含む。256点のFFTは、捕獲、および平均される(または単純に合計される)結果にわたり繰り返されてよい。例えば、5000個の標本を所与として、256点のFFTは、標本1〜256に対して、次に標本257〜512に対して、3番目に標本513〜768に対して等、行われてよい。これらすべてのFFTの結果は合計され、ビンごとに約20の値の平均を提供する。捕獲全体(5000個の標本)に対して単一のFFTを実行することは可能だが、そのような大規模のFFTの計算的な複雑さは多くの場合かなり高い。
【0066】
最も大きい干渉を指示するために、FFT点間の最大振幅が取られてよい。この振幅が定義済みの閾値を上回る場合、完全な捕獲が信頼できるには干渉が大きすぎるとみなされる。閾値の選択は実装形態によって決まるが、典型的にはFFTにおける点の数、平均されるFFTの数、RFフロントエンドの特性などの要素に依拠する。閾値の目標は、通常の背景ノイズ(低)と、カメラの電子機器によって作り出される干渉(高)とを区別することである。オプションで、信号から十分に(例えば少なくとも0.5MHz離れて)分離した干渉は許容されてよい。したがって、予期されるGPS信号に近いFFTビンしか計算する必要がないことがある。さらなる代替策として、2つの閾値が使用されてよく、その閾値とはつまり(0.5MHz内の)帯域内干渉用に1つ、および(0.5MHzを超える)帯域外干渉用にもう1つである。
【0067】
図6は、FFTにより干渉を推定するGPS受信機20aの実施形態を示す。マイクロプロセッサ140aは、カメラ10からシャッターが切られるトリガ信号を受け取り、それに応じてフロントエンドを活動化する。フロントエンドは、アナログ増幅、フィルタリング、および混合ユニット100、ダウンミックスするために信号を供給する局部発振器(LO)110、および結果として生じるダウンミックスされたIF信号を標本化するアナログ−デジタル変換器(A/D)120を備える。当業者にはよく知られるように、これらはすべて、標準的なGPS受信機用の従来型のRFフロントエンド・コンポーネントである。アナログ−デジタル変換器(A/D)120によって出力されたIF標本は、上述のようにメモリ130に記憶される。マイクロプロセッサ140aが標本をメモリから取り出し、FFTを実行する。マイクロプロセッサは汎用プロセッサでよいが、好ましくはデジタル信号処理(DSP)操作に特化している。そうしたチップは、典型的には最適化されたオンボードFFT機能を提供する。FFTに基づいて、干渉が許容閾値を下回るとマイクロプロセッサが判定する場合、マイクロプロセッサはフロントエンドおよびメモリを制御して、「完全な」200ミリ秒の捕獲を記憶する。干渉が閾値を上回る場合、(ステップ66、68、および70に関して上記で論じたように)マイクロプロセッサは適切な休止の後、別のIFデータの短いバーストを捕獲し始める。
【0068】
干渉を推定するための別の方法は、受信される信号の標本を、プログラム可能な周波数源によって生み出される信号の標本と混合することである。この周波数源は、対象となっている中央周波数の正弦曲線(sinusoid)である基準信号を生成する。対象となっている周波数は、IFデータの標本内の衛星信号の予期される周波数に相当する。今度はこの周波数が、信号をダウンミックスする際に使用された局部発振器(LO)の周波数に依拠する。したがって、プログラム可能な周波数源の周波数はLOの周波数に関連して選択され、その結果、生成される信号の標本は、IF信号データのスペクトル内の、衛星信号の予期される位置と周波数について一致する。このようにして、混合操作は、衛星信号の予期される位置を中心とする周波数スペクトルの一部を調べる。干渉の大きさは、例えば混合操作の出力を単純に合計することによって決定されてよい。
【0069】
この、衛星周波数において干渉を検出するために混合することは、キャリア位相測定および符号位相測定中に相関関数を実行するために使用される、同じまたは同様のハードウェアによって有利には実行されてよい。それは、生成される基準信号の標本が、相関に使用される信号に一致するが、キャリア上に変調される特定の衛星の拡散符号には一致しないからである。したがって、所与のGPS受信機のハードウェアの実装形態にもよるが、相関器内の符号混合部を単純に無効にし、その符号混合部を、干渉を推定するのに適した装置に変えることが可能でよい。
【0070】
図7は、この手法を実施するのに適したGPS受信機20bの実施形態を示す。図6の受信機20aに比べ、この受信機は、装置内の他のハードウェア・コンポーネントを主に制御するために使用される、より単純なプロセッサ140bを有する。干渉を推定すること64は、上述のように相関器145によって行われる。
【0071】
当業者には容易に明らかになるように、受信機と様々な衛星との相対運動に起因するドップラー効果を考慮に入れ、さらに実施上の局部発振器の周波数偏移に対するロバスト性を保証するために、様々な周波数において衛星信号を探索することが必要である。干渉を測定することにも同じ原理が当てはまる。したがって、衛星信号を得るために探索される周波数に相当する離散周波数群に中心がある干渉を検査することが有益な場合がある。干渉を検査することは、これらの離散周波数のそれぞれにおいて、正弦曲線の基準信号と混合することを含む。周波数計画の離散周波数を順に段階的に進む(step−through)ために、単一のプログラム可能な周波数源および混合器(つまり単一の相関器)が使用されてよい。これは図7の実施形態に当てはまる。あるいは、様々な中央周波数に関して異なる検査を同時に実施するために、複数の異なる相関器が使用されてよい。
【0072】
干渉が閾値を下回るまで待機する基本的手法は、オプションで様々な方法で増強されてよい。
【0073】
例えば、一部のカメラには、(例えばクロックの高調波に起因する)永続的な干渉源が存在することが観察されている。したがって、その時間により完全な捕獲が実行されなければならない、何らかの最大タイムアウト(例えば2秒)を設定することが有益な場合がある。さもなければ、干渉検出器は、閾値の基準を決して満たすことなく検査をいつまでも繰り返し得る。さらに、先に上述したように、遅延が長ければ長いほど、GPS信号のバーストが捕獲される前にユーザがカメラをしまう可能性がより高くなる。
【0074】
電力消費を節約する(およびそれにより電池寿命を延ばす)ために、最小遅延(例えば1秒)を設定し、それにより、干渉検査が1秒の遅延の後に最初にイネーブルにされることも有益な場合がある。これらの改変形態の両方を実装することで、シャッター後の1秒から2秒の間の何らかの時点で「完全な」捕獲が行われ、厳密なタイミングは検出される干渉によって決まる。
【0075】
この実施形態のさらなる改変形態では、GPS受信機は、経時的な干渉推定の履歴を記憶することができる。干渉推定の履歴を記憶することは、将来の捕獲のためのタイミングを調節するために、干渉水準についての前の観測を使用できるようにすることができる。
【0076】
例えば、既に記載した実施形態では、IFデータの標本の短いバーストが繰り返し捕獲される62ごとに、干渉の推定が生成される64。これらの推定のそれぞれが、メモリ130に記憶されてよい。最後の推定が所要の閾値を下回ることなく最大遅延が到達される場合、閾値の値を調節するために、記憶済みの推定の履歴が解析されてよい。このように閾値の値が調節されることは、次に写真が撮影されるとき、GPS信号の標本を捕獲する70タイミングが、よりよく最適化されることをうまくいけば保証する。つまり、タイムアウトが生じることは、現在の閾値の設定が現在の干渉の水準には低すぎることを指示するものとして理解されてよい。例として、新たな閾値は、観測される推定の平均として設定されてよい。干渉の水準の急落を探し求めるために、より複雑な解析が使用されてよい。より複雑な解析は、推定を2つのクラス(「高」干渉と「低」干渉)へと集団化すること、または連続した推定間の差異を解析し、最大の単一の下落に対応する閾値を選択することを含んでよい。
【0077】
推定の履歴を使用することにより、この方法は、前の写真のシャッター信号の後に以前測定された干渉の1つまたは複数の水準に基づいて、ある写真のための閾値が決定されることを可能にする。このようにして、このシステムは、経時的な干渉特性の変化または様々な写真のモードの変化に適応することができる。
【0078】
閾値が高すぎる場合、閾値を下げるために同様の原理が等しく使用されてよい。例えば、干渉の最初の推定が閾値を下回る場合、後続の写真のために閾値が下げられてよい。
【0079】
他の閾値も同様に変えられてよい。例えば、干渉の最初の推定が絶えず閾値を下回ることが分かる場合は最小遅延が減らされてよく、その理由は、それぞれのシャッター信号の後に最小遅延がシステムを長く待たせすぎている可能性があるからである。
【0080】
リアルタイムGPS受信機では、位置計算アルゴリズムからのフィードバックに基づいて閾値を適応させることが可能でよく、位置測定が可能な場合、位置測定が可能であることは干渉水準が許容できることを指示してよい。位置測定に失敗した場合、位置測定に失敗したことは干渉が大きすぎたことを指示してよい。当然、衛星の不鮮明な可視性などの他の要素も位置測定を計算する能力に影響し、これらの要素も考慮に入れられるべきである。
【0081】
GPS信号の標本の完全な(200ミリ秒の)捕獲にも干渉推定プロセスが適用される場合、捕獲して処理する受信機にも同様のフィードバック機構体が実装されてよい。この推定は、GPS受信機に搭載されて実行され、またはさらに処理するために、記憶された標本が別の装置に転送されるときに後で実行されてよい。いずれの場合にも、そうしたフィードバックは、シャッター信号の後のより遅い時点において活動状態になる干渉を識別するのに役立ってよい。遅い干渉源は、写真が撮影され、カメラのメモリに画像データが書き込まれた後に、カメラの表示画面を再活動化することなどのハードウェア事象を含んでよい。
【0082】
より長期の解析のために、捕獲されるGPS信号の標本(「完全な」捕獲)とともに、実際に使用される遅延および/または関連する閾値が記録されてよい。このように記録することは、この方法のためのロバストな平均のパラメータ群への収束を徐々に促進し得る。
【0083】
上記の説明から明らかなように、本発明は、リアルタイムの従来型GPSシステムおよび捕獲して処理するシステムに等しく適用可能である。本発明は、GPS衛星測位に限定されず、例えばグロナスやガリレオを含む他の任意の地球航法衛星システム(GNSS)に適用されてよいことも留意すべきである。
【0084】
「中間周波数」信号への言及は、ゼロ(またはほぼゼロ)の中間周波数を有すると単純にみなされる、直接変換衛星測位受信機の可能性を排除することを意図するものではない。したがって、「中間周波数」信号は、衛星周波数から何らかのより低い周波数へとダウンミックスされた信号を指し、ベースバンド拡散符号の回復を直接もたらしてよい。したがって「中間周波数」は、擬似距離を導き出すために必要なキャリア位相測定および符号位相測定を実行するための相関計算への信号入力の総称語である。
【0085】
他の様々な修正形態が、当業者には明らかになるであろう。
【技術分野】
【0001】
本発明は、衛星測位システムに関する。特に本発明は、衛星測位受信機を使用した、写真の「ジオタギング(geo−tagging)」(画像の捕獲の位置を記録すること)に関する。
【背景技術】
【0002】
ジオタギングは、画像およびビデオに注釈を付け編成するための、人気が高まっている方法である。位置メタデータをメディアに追加することにより、ユーザは、例えば地図上に位置を記入(plot)することにより、面白くかつ直観的な方法で画像集を検索し閲覧することができる。
【0003】
そうした注釈を作成するために必要な位置名または地理座標を手動で打ち込む多大な労力を必要とする作業を回避するために、多くのカメラ・ユーザは厳密な位置メタデータを提供するために衛星測位に向かっている。
【0004】
全地球測位システム(GPS)などの衛星測位システムは、受信機が、周回軌道衛星群からの信号の測定された到達時間に基づいて自らの位置を計算することを可能にする。
【0005】
GPS受信機をデジタルカメラに統合することが知られている。この構成を用いると、写真が撮影される度に受信機が位置測定を推定する。その結果生じる推定は、典型的には例えばExif(交換可能画像ファイル:Exchangeable Image File)メタデータの一部として画像ファイルに追加される。
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、この構成での問題は、カメラ・サブシステム内の電子機器が、衛星からの信号をGPS受信機によりはっきりと受信することを乱す、電磁(EM)干渉を引き起こすことがあることである。カメラの電子機器によって作り出されるノイズは、位置測定を達成することをより困難にしもしくは不可能にすることがあり、またはカメラの電子機器によって作り出されるノイズは、位置測定の結果の精度を単純に下げることがある。
【課題を解決するための手段】
【0007】
本発明の態様によれば、カメラによる第1の写真の捕獲の位置を推定するための衛星信号を受信する方法が提供され、この方法は、第1の写真の捕獲のタイミングに関係する信号を受信するステップと、ゼロではない持続時間の間隔にわたり待機するステップと、間隔の後、衛星信号を受信するステップとを含む。
【0008】
位置を決定するために、写真を撮影することとGPS信号を標本化することとの間にゼロを上回る遅延またはオフセットを導入することにより、この方法は、GPS受信に関する、カメラの電子機器による干渉を低減する。この方法は、写真の捕獲のタイミングに関係する単一のトリガ信号、例えば「シャッター・リリース」ボタンを押すこと、だけの可用性に依拠する。遅延は、カメラがEM干渉を作り出している期間の持続時間に相当する。したがって、カメラからは(例えば画像の捕獲を完了したことを指示するための)追加の信号は不要である。追加の信号が不要であることは、GPSとカメラ・サブシステムとの間の相互接続または通信インターフェイスの複雑さを最小限に抑えることにより、GPSおよびカメラ・サブシステムが設計において単純かつモジュラー式であることを可能にする。
【0009】
一部の実施形態では、間隔の持続時間は所定の遅延を有する。
【0010】
好ましくは、持続時間は手動で調節することができる。
【0011】
持続時間を手動で調節することができることは、柔軟性を保証する。遅延を手動で構成することは、GPS受信機が使用される状況に応じてGPS受信機がカスタマイズされてよいことを意味する。外付けのGPS受信機では、手動調節はユーザによるものでよい。組み込まれるGPS受信機では、カスタマイズは、サードパーティーのGPS受信機を使用してカメラが組み立てられるときに工場内で行われてよい。
【0012】
持続時間は、カメラのパラメータに基づいて決定されてよい。
【0013】
異なるカメラは様々な量の干渉を作り出し、シャッターが切られた後の様々な持続時間にわたり様々な量の干渉を作り出す。すべてのカメラのGPS受信のタイミング遅延を最小限に抑えるために、型式、モデル、捕獲モード、より詳細な情報などの、カメラのパラメータに基づいて遅延を選択しまたは計算することが有利な場合がある。
【0014】
持続時間は、カメラから受け取られるパラメータに基づいて自動的に決定されてよい。
【0015】
カメラが、自らに関する情報を伝送することができる場合、GPSタイミング遅延のカスタマイズは自動的に達成されてよい。カスタマイズが自動的に達成されることは、(例として)手動でカスタマイズすること、またはカメラ・モデルのパラメータをGPS受信機にユーザが入力することの必要性を回避する。カスタマイズが自動的に達成されることは、個々の写真に関連するカメラ・パラメータに基づく、より洗練された遅延の調節も可能にすることができる。例えば、カメラのモード(とりわけフラッシュ/フラッシュなし、圧縮ファイル/非圧縮ファイル、解像度)は、持続時間、および捕獲中に生み出されるノイズの量に影響を与えることがある。
【0016】
この方法は、写真の捕獲に関連する電磁干渉を測定するステップをさらに含んでよく、測定される干渉に基づいて間隔の持続時間は決定される。
【0017】
カメラが自らのパラメータを伝送することの代わりとして、またはそれに加え、適切な遅延持続時間を推論するために、特定のカメラによって生み出される実際の干渉が測定され解析されてよい。この直接測定は、不正確な予測、またはカメラ・モデルのパラメータを干渉期間および適切な遅延に関連付けるデータベースを維持する必要性を回避することができる。
【0018】
干渉を測定することによって決定される持続時間は、現在の写真のための遅延を設定するために使用されてよく、または後続の写真のための遅延を設定するために使用されてよいことに留意されたい。第1の代替策は、優勢な干渉条件にシステムが「リアルタイム」で適応するよう、写真ごとに遅延持続時間を動的に設定するものである。第2の代替策は、必要な場合に「オフライン」解析を可能にし、つまり、ある写真から決定される遅延持続時間が、他の後の写真のための遅延を設定するために使用される。したがって、干渉を測定する際に使用される写真は、写真であって、その写真を用いてその後遅延が適用される、写真と同じでよくまたは異なってもよい。
【0019】
電磁干渉を測定するステップは、受信されるIF信号の標本のシーケンスに対してフーリエ変換を行うこと、および受信されるIF信号の標本のシーケンスを、対象となっている周波数において生成される信号の標本と混合することのうちの一方または両方を含んでよい。
【0020】
間隔の持続時間は、干渉の水準を繰り返しまたは継続的に測定することによって決定されてよく、間隔は、測定される干渉の水準が閾値を下回るとすぐに終了する。
【0021】
この閾値は、少なくとも1枚の以前の写真の捕獲に対応する、前に測定された干渉の水準に基づいて選択されてよい。
【0022】
持続時間は、衛星信号を受信するステップが、写真の捕獲に関連する電磁干渉の予期される減退の後できるだけ早く実行されるよう、選択されてよい。
【0023】
あらゆる場合において、遅延はできるだけ短時間にとどめることが有益である。画像を捕獲した後の遅延が長ければ長いほど、(写真が撮影された位置からカメラが移動していることがあるため)位置推定の誤差はより大きくなる。また、カメラが(例えばポケット、鞄、または車の中に)しまわれ、そのため衛星信号を受信することがより困難になる恐れがある。例として、遅延は0.1秒から10秒の間、より好ましくは0.5秒から5秒の間でよい。
【0024】
衛星信号を受信するステップは、所定の回数繰り返されてよい。
【0025】
所定の回数繰り返されてよいことは、位置測定が少なくとも1回は成功する可能性を高める。
【0026】
この方法は、間隔の間、追加の写真の捕獲のタイミングに関係するさらなる信号を受信するステップと、それに応じて間隔の持続時間を調節するステップとをさらに含んでよい。
【0027】
最初の写真のすぐ後にもう1枚の写真が撮影される場合、カメラの電子機器からのEM干渉の途切れはほとんどない、またはないことがある。したがって、GPS信号の受信は再スケジュールされるべきである。例えば、遅延を制御するタイマーがリセットされてよい。
【0028】
持続時間を調節するステップは、間隔の持続時間を所定の量だけ長くすることを含んでよい。
【0029】
捕獲される写真の数が増えるとき、干渉を回避するために必要な遅延は累積的(cumulative)でよい。したがって、(例えば)その後シャッターが切られるときにタイマーを単純に再始動させることは、干渉を減らすには十分ではないことがある。
【0030】
この方法は、捕獲の位置を推定するための後の処理を可能にするよう、受信した衛星信号をメモリに記憶するステップをさらに含んでよい。
【0031】
標本を記憶することは、位置測定を導き出すための即時(リアルタイム)処理の代替策である。この「捕獲してその後処理する」手法は、GPS受信機が単純化されること、およびより少ない電力を消費することも可能にする。衛星信号の標本を遅延して捕獲することは、位置測定が可能であるという信頼性を高めることを与えるため、本発明は標本を、それらの標本を完全には処理せずより安全に記憶する。つまり本発明は、捕獲してその後処理するGPS受信機にとって特定の利益を有し、その理由は、この種の受信機は捕獲時の干渉にさもなければ気付かないからである。リアルタイムGPS受信機では、干渉の対価は、衛星信号を受信し、位置測定を計算するための、再三の試みによって消費される余分な電力であり得る。しかし、捕獲して処理する(capture−and−process)受信機では、干渉は位置測定を計算する能力を完全に使えなくすることがある。本発明の別の態様によれば、受信機器が関連するカメラのパラメータを受信することと、受信したパラメータに基づいて、カメラによる写真の捕獲に関連する電磁干渉の期間の持続時間を自動的に決定することと、決定した持続時間を受信機器に伝送することとを含む、衛星信号受信機器を構成する方法が提供される。
【0032】
これは、上記の前の方法における遅延持続時間を自動的に構成する方法である。カメラのパラメータは自動的に受信され、対応する正しい遅延がGPS受信装置に自動的にダウンロードされる。この方法は、ユーザの対話が一切なしに、最適な遅延を構成することを可能にする。この方法は、受信機がカメラに接続されるときの、(上記に述べた)受信機による自動自己較正の代替策でもよい。上記に述べた手法に比べ、この方法は、遅延およびカメラ・パラメータのデータベースを記憶するための、受信装置の負担を除去することができる。
【0033】
本発明のさらに別の態様によれば、先に上述した方法のうちの1つを実行するようにされた衛星信号受信機器であって、写真の捕獲のタイミングに関係する信号を受信するための受信手段と、衛星信号を受信するための受信手段とを備える、衛星信号受信機器が提供される。
【0034】
次に本発明は、添付図面を参照して例として記載される。
【図面の簡単な説明】
【0035】
【図1】本発明の実施形態に従って動作するGPS受信機およびカメラの図である。
【図2】本発明の実施形態に従ってGPS受信機が構成されてよい方法を示す図である。
【図3】本発明の実施形態に従って衛星信号を受信する方法を示す流れ図である。
【図4】別の態様の実施形態に従って衛星信号受信機を構成する方法の流れ図である。
【図5】遅延の持続時間が動的に決定される実施形態に従って衛星信号を受信する方法を示す流れ図である。
【図6】図5の方法の一実施形態によるGPS受信機のさらなる詳細を示す図である。
【図7】図5の方法の別の関係する実施形態によるGPS受信機を示す図である。
【発明を実施するための形態】
【0036】
GPS受信機は、画像が撮影された場所に対応する位置メタデータに写真がタグ付けされることを可能にするために、カメラと組み合わせられてよい。この組合せは、GPSサブシステムをカメラの中に内部的に統合することにより、または外付けのGPS装置を従来のカメラに接続することにより達成されてよい。後者の接続は、外付けフラッシュなどの装置を接続するために従来より使用されてきたカメラ・ホットシューによるものとすることができる。したがって従来のホットシューは、(フラッシュが同期することを可能にするために)シャッターを切ることに対応するトリガ信号を既に提供している。位置をタグ付けするようGPS受信機をトリガするために、全く同じトリガ信号が使用されてよい。
【0037】
GPS受信機は、標準的な「リアルタイム」GPS、または最近開発された捕獲してその後処理する(本明細書では以下、「捕獲して処理する」)タイプのGPS受信機でよい。この後者のタイプのGPSは、GPS信号を受信する動作と、位置を導き出すためにそのGPS信号を処理する動作とを分ける。基本的手法は、写真が撮影されるときに、処理されていないGPS中間周波数(IF)データの短い(例えば200ミリ秒の)バーストを捕獲することである。処理は後で行われ、別個の装置(例えば、写真および標本をアップロードした後のパーソナル・コンピュータ)上でよい。したがって、捕獲して処理するシナリオでは、捕獲される信号の標本の完全性をできる限り保証することが特に重要であり、捕獲される信号が破損し、またはない場合、(リアルタイムGPSの場合ならそうだろうが)良好な信号を再捕獲する機会はない。
【0038】
本発明者らは、シャッターを切ることによってトリガされる捕獲は多くの場合非常にうまく機能するが、一部の現代のカメラは、写真が撮影されるときに多くの電磁干渉を生み出すことを発見した。その後この干渉がGPSアンテナ(および/またはGPSのRF回路)によって受け取られ、記録された生のIFデータの品質を低下させ、場合によっては干渉は位置測定を得られなくし、またはもっとひどい場合はどんなGPS信号も一切検出できなくするのに十分である。
【0039】
GPSモジュールが干渉の影響をより受けなくするために、よく知られているRF設計技法を使用することは可能だが、モジュールは引き続き所望のGPS信号を受信できなければならないため、完全に隔離することは不可能である。同様に、ある者はより少ない干渉を発するようにカメラを再設計することができるが、その再設計することは、多くの場合GPS製造業者には管理できずかつ/またはカメラの設計に対して重大な影響を与える(カメラをより大きくする、またはコストを増加させる)ことになる。
【0040】
本発明は、カメラの電子機器からの干渉を減らすより優れた方法を提供する。その考えは、カメラの電子機器によって引き起こされる干渉が許容水準にまで小さくなった後、GPS IFデータの捕獲ができるだけ早く行われるよう、写真が撮影された後のGPS IFデータの捕獲を遅らせることである。写真を撮影することは、シャッター・リリース・ボタンを押すことによって指示される。一部の実施形態では、遅延は、写真を撮影することの前にあらかじめ定められたプログラム可能な遅延を含み、またはそうしたプログラム可能な遅延から専ら成ってよい。
【0041】
ユーザは写真を撮影することと捕獲が行われることとの間で移動する場合があるので、遅延を加えることは、結果として生じる位置測定の精度を下げることがある。また、写真と捕獲との間にカメラが「しまわれる」ことがあり、記録されるGPS信号の品質を(捕獲中の急速な加速により、またはアンテナが遮蔽されることにより)低下させる恐れがある。したがって、遅延を最小限に抑えることが望ましい。諸実験は、多くの捕獲ではわずか1秒の遅延で十分だが、重要なことには、最適な遅延はカメラごとに異なることを示している。さらに、干渉の大多数は、データ転送であって、その持続時間および速度が種類/モデルに加えカメラの様々なパラメータに依拠する、データ転送によるものであることが分かっている。これらのパラメータは、ユーザが圧縮(JPEG)画像を撮影しているのか、非圧縮(生)画像を撮影しているのか、どの解像度が選択されているのか、内蔵メモリが使用されているのか、外部メモリが使用されているのか、メモリの種類(例えばコンパクト・フラッシュ対セキュア・デジタル)およびそのメモリの書込み速度、ならびに「一時」メモリの中に何枚の写真があるかを含む。
【0042】
遅延される捕獲の手法の利点は、記録された信号の品質に対する損傷が最小限に抑えられてよく、十分に正確な位置を提供する可能性が最大限にされてよいことである。同時に、カメラとGPS受信機との間の対話は単純化され、ノイズを発生させる(つまり干渉を発生させる)カメラの電子機器の活動が終了したことをGPSに信号で伝える必要はない。
【0043】
図1は、本発明の方法の一実施形態に従って動作するシステムを示す。カメラ10が、GPS受信機20に接続される。この接続は、カメラ上でシャッターを切る行為に応じて、受信機20がGPS信号の標本を受信(捕獲)するようトリガされることを可能にする。GPS受信機20がリアルタイム受信機の場合、標本が受信された直後に位置測定が計算される。GPS受信機20が捕獲して処理する受信機の場合、標本は記憶される。受信機20は、カメラの筐体に組み込まれて(統合されて)よく、または通信リンクによりカメラ10に接続される別個の外部装置でもよい。このリンクの1つの候補は、カメラ・ホットシューによる接続だが、Bluetoothによる無線接続など、より進化した接続も可能である。
【0044】
図2は、所与のカメラ10に関して、正しい遅延で構成されているGPS受信機20を示す。カメラ10は、例えばユニバーサル・シリアル・バス(USB)リンクにより、パーソナル・コンピュータ(PC)30に接続される。受信機20も、何らかの適切な接続によって接続される。PC30は、いかなる場合にもパラメータ情報をPCに提供するカメラ10に問い合わせてよい。このパラメータ情報は、カメラのモデルおよび型式、またはそのカメラの画像捕獲仕様に関するより詳細な情報を含んでよい。この情報に基づいて、PC30は、シャッターが切られる事象の後にGPS標本を捕獲するときに、受信機20によって使用されるべき最適な遅延を計算しまたは選択する。次いで、この遅延が受信機20にダウンロードされる。遅延を計算するために、受信機20は、カメラのモデルの一覧表および対応する最適な遅延のデータを保持する中央データベース・サーバ40と連絡を取ってよい。
【0045】
受信機20を構成することは、受信機が初めて新たなカメラ10とともに使用されようとするとき、PC30を使用して行われてよい。受信機20が外付けの付属品の場合、これが当てはまる。この場合、構成することは完全に自動的でよい。例えば、受信機付属品が、その受信機付属品とともに前に使用されていないカメラと同時にPCに接続される場合、ソフトウェアは、受信機20がカメラ10とともに使用されるように構成されるべきかどうかユーザに尋ねることができる。受信機20がカメラ10とともに使用されるように構成されるべきである場合、ソフトウェアは、適切な遅延値を推論しまたは調べるために必要なカメラのパラメータを自動的に決定する。
【0046】
その一方で、受信機がカメラに統合されている場合、構成するステップは、典型的にはカメラが組み立てられるときに工場内で行われる。これは、カメラ製造業者が汎用GPS受信機を購入し、自社のカメラのパラメータについてその汎用GPS受信機を適切にカスタマイズすることができることを意味する。この場合、受信機20は明らかに直接カスタマイズされてよく、カメラに関係するパラメータ情報は既に製造業者に知られているので、カメラに関係するパラメータ情報を調べる必要はない。
【0047】
図3は、使用時に受信機20によって実行される方法ステップの例を示す。ステップ50で、シャッターを切る信号がカメラから受信されまたは検出される。この信号は、写真が捕獲されたことを指示する。ステップ60で、受信機は、捕獲のための時間を考慮に入れるために、事前にプログラムされた遅延にわたり休止する。遅延は、画像ファイルをカメラのメモリに記憶することに関連するデータ転送活動のための時間も含むべきである。事前に設定された時間が経過するとき、受信機は、カメラの電子機器からの干渉なしにGPS信号を捕獲する。
【0048】
カメラが速く連続して何枚もの写真を撮影し、最初の写真によって開始される遅延が完了する前に(つまり最初の写真に関連するGPS信号を捕獲する前に)後続の写真が撮影されることは当然起こり得る。そうした状況では、(カメラは後続の写真を撮影するため、カメラが引き続き活動状態にあることにより前の捕獲はかなりの干渉を含むので)それぞれの写真の厳密な固定遅延後に捕獲を行うことが成功する可能性は低い。この問題にうまく対処するために、いくつかの手法が採用されてよい。
【0049】
第1の手法では、後続の写真の通知(シャッター・トリガ)は、単に遅延のカウントダウンを再始動させる。この第1の手法は、シーケンスの最後の写真の後に、通常のプログラムされた遅延を用いて単一の捕獲が行われることをもたらす。例えば遅延が2秒に設定され、写真が時間t、t+0.5秒、およびt+1.5秒に撮影される場合、捕獲はt+1.5+2=t+3.5秒において行われる。
【0050】
第2の代替的手法では、シーケンス内の最後の写真の後に単一の捕獲が取られるが、撮影される新しい写真ごとに遅延タイマーが増加される。この第2の手法は、(一部のカメラの場合のように)干渉が主にデータ転送によって引き起こされ、そのため撮影されるそれぞれの写真が、カメラが行うための一定の追加の作業量を作り出す場合にうまく機能する。結果は、遅延が、最初の写真から計算されるが、別の写真が撮影される度に増えることである。例えば遅延が2秒に設定され、写真が時間t、t+0.5秒、およびt+1.5秒に撮影される場合、捕獲はt+3*2秒=t+6秒において行われる。
【0051】
第3の手法では、遅延をプログラムすることは、写真の連続撮影用の様々な遅延を(ユーザにより、またはデータベースを介して)明示的に設定することを伴う。
【0052】
上記の規則の組合せを含むがこれだけに限定されない、複数の画像を捕獲する場合に遅延を計算するためのより洗練された手法も可能である。
【0053】
本発明の別の改変形態では、撮影される写真ごとに、(異なる遅延において)複数の捕獲が行われる。干渉が可変的でありまたは予測不能な状況では、いくつかの捕獲を有することは、十分に正確な位置を提供する可能性を改善することができ、たとえ1つの捕獲がひどく損傷していても、もう1つの捕獲は損傷していないことがある。さらに、異なる捕獲は、(周波数計画を変更することおよび/またはフィルタのパラメータを変えることなど)RFフロントエンドの様々な設定を使用することができる。
【0054】
図4は、本発明の態様の実施形態による構成方法を示す。ステップ80で、カメラのパラメータが(例えばPC30によって)受信される。ステップ90で、GPS遅延の正しい持続時間が決定され、ステップ100で、この情報がGPS受信機にダウンロードされる。
【0055】
この基本プロセスについては、多くの改変形態が可能である。GPS受信機20がカメラ10との通信インターフェイスを直接有する場合、PC30は不要でよい。この場合、受信機20はカメラから直接パラメータを受け取り、自ら最適な遅延持続時間を計算し、計算した最適な遅延持続時間を次に写真が撮影されるときに使用してよい。カメラ10からGPS受信機20へのこの直接通信の1つの利点は、パラメータがより頻繁に、例えばカメラのユーザが別のモードを選択するときに送られてよいことである。上で述べたように、カメラによって生み出される干渉は、画像の解像度やJPEGファイルが記憶されるのか、生ファイルが記憶されるのかなどの要素によって決まる。受信機20がこの情報を得ることができる場合、遅延は大幅に最適化されることがある。写真のパラメータに基づく最適化の別の例は、方向に応じて(すなわち縦長モードと横長モードとの間で)遅延を適応させることである。カメラ内の固定されたGPSアンテナは、「誤った」方向でより非効果的に衛星信号を受信する可能性が高く、したがって、縦長の写真が撮影されるとき、信号を受信しようと試みる前に、カメラがその通常(横長)方向に戻されるための時間を考慮に入れるために、より長い遅延を有することが有益な場合がある。
【0056】
必然的にそうした構成は、別の方法で使用されるよりも(単純な事例では唯一の信号はシャッター/トリガである)、カメラと受信機との間により洗練されたインターフェイスを必要とする。しかし、内蔵GPSでは、カメラの電子機器とのインターフェイスの定義において少なくとも多少の柔軟性がある。外付けのGPS付属品でさえ、十分に進化したインターフェイスが既に存在する。これらのインターフェイスは、カメラのパラメータを外付けのフラッシュ装置に渡すように既に設計されている、Bluetoothなどの無線接続およびインテリジェント・ホットシューなどの有線接続を含む。
【0057】
PC30および/またはサーバ40が構成方法から省かれる場合、カメラのデータベースをGPS受信機のメモリに記憶することが必要な場合がある。カメラのデータベースをGPS受信機のメモリに記憶することは、所与のカメラが接続されるとき、所与のカメラの型式およびモデルについて、正しい持続時間が決定されることを可能にする。カメラおよび持続時間についての小さい一覧表でさえ記憶することは、ユーザが手動でGPS付属品を再構成する必要なしに、GPS付属品が様々なカメラとともに使用されることを可能にする。
【0058】
GPS受信機の中に格納されようがPC上に格納されまいが、どんなデータベースも、不完全でありまたは古い情報を含むことがある。受信機付属品では、このデータベースは望まれないメモリ負担をもたらすこともある。したがって代替策として、本発明は、遅延持続時間を導き出すために使用されるべき干渉の直接測定値も提供する。構成方法についてのこの改変形態では、GPS受信機が写真の捕獲に関連する干渉を決定するための試みを行う。例えば、受信機は、「テスト」写真が撮影されている間に、比較的長い連続的なGPS信号データのストリームを受信してよく、次いで、カメラの電子機器からの干渉の持続時間および重大度を評価するためにこのデータは処理されてよい。処理は、GPS受信機内で、または(特に捕獲して処理する付属品の場合は)アップロードされた後にPC上で実行されてよい。どんな場合でも、試みで観測された干渉が解析されると、適切な遅延持続時間が後続の写真のために設定されてよい。試みは、GPS受信機を最初に使用するときに、または新たなカメラが使用される/検出される度に行われてよい。
【0059】
GPS受信機をカスタマイズすることはできる限り自動化することが有益だが、手動の「オーバーライド」が必要な状況もあり得る。したがって、好ましくは、捕獲遅延の持続時間を手動で調節することが可能である。手動で調節できることは、未知のカメラ(つまり通常のデータベース内に列挙されていないカメラ)が接続されるときに、ユーザがGPS受信機をプログラムすることを可能にする。手動で調節できることは、カメラから受信機へのモード情報を伝達するためのインターフェイスが利用できない場合にさえ、写真の捕獲のモードに応じて遅延を調節することを可能にもする。直接的な手動構成は、多数のカメラの中に標準的なGPS受信機を組み込むカメラ製造業者にとっても普通になる。
【0060】
上記に記載された実施形態では、遅延の持続時間は、写真が捕獲される前(つまりシャッターが切られる信号を受け取る前)に決定される。この場合、遅延の持続時間は、写真の捕獲に関してあらかじめ定められている。しかし他の実施形態では、写真が撮影された後に、持続時間を優勢な条件に動的に適応させることが可能である。したがって遅延は、所与の写真が撮影された後に実際に検出される干渉に基づいて決定される、持続時間が変えられる遅延を含み、またはそうした遅延から専ら成ってよい。この場合、遅延の持続時間は、衛星測位信号を受信することに関して依然としてあらかじめ定められているが、シャッターを切ることまたは写真を捕獲することに関してはもはやあらかじめ定められていない。
【0061】
次に、そうした1つの実施形態が例として、および図5〜図7を参照して記載される。
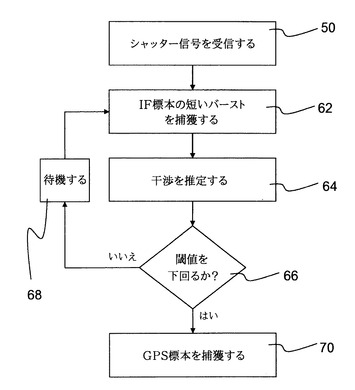
【0062】
この実施形態では、ステップ50でカメラ・ホットシューによりトリガすると、受信機20の中の(RFフロントエンドとしても知られる)GPS無線機100、110、120がイネーブルにされ、ダウンコンバートされた(IF)信号の標本を作成し始める。ステップ62で、このデータの約1ミリ秒相当がGPS受信機20の内蔵メモリ130に記憶される。ステップ64で、干渉の水準を評価するためにこのデータが解析される。この例では、最初の捕獲の1ミリ秒の持続時間は、位置測定を導き出すための完全な処理を可能にするには短すぎる。むしろその意図は、干渉の推定をすぐに得ることである。ステップ66で、干渉が許容閾値を上回ることが検出される場合、受信機は短い期間、典型的には1ミリ秒〜10ミリ秒程度にわたり待機し(ステップ68)、さらに最初の捕獲を繰り返す。最初の捕獲の標本内で検出される干渉が閾値を下回るまでプロセスは繰り返される。検出される干渉が閾値を下回ることが起こるとき、位置計算で使用されるべきGPS信号の標本のバーストを捕獲することが無難である。したがって、この方法は、前の実施形態にあるようにステップ70に進む。
【0063】
この手法は、ステップ70の、結果として生じる「完全な」GPS捕獲の信頼性が高められる、先に述べた利点を有する。この手法はさらに、干渉を検出するために使用される標本化62および試験64が最小限に抑えられてよいので、エネルギー効率が比較的よい。この手法は、例えば少なくとも1つのバーストが成功裏の位置測定につながることを期待して、GPSデータの「完全な」200ミリ秒のバーストを繰り返し捕獲するよりも効率的である。リソースを効率的に使用することは、携帯型装置の電池寿命を延ばすことに寄与することができる。
【0064】
この方法は、リアルタイムGPS受信機、および捕獲して後で処理する受信機の両方に有益であることに留意されたい。前者の場合、GPS IF信号の標本を完全に処理する多大な計算を必要とするステップは、そのステップが成功する可能性が高くなるまで遅延される。したがって、労力およびエネルギーが潜在的に節約される。捕獲して処理するシステムでは、記憶されるGPS信号の標本の信頼性が高められる点に利益がある。
【0065】
ステップ64では、1ミリ秒の最初のGPS捕獲における干渉の水準を推定するために、様々な技法が使用されてよい。1つの手法は、例えば高速フーリエ変換(FFT)を使用して、周波数領域解析を行うことである。256点のFFTは、5MHz近辺の典型的な標本率を仮定し、1点当たり約20KHzのノイズ帯域幅を与える。この標本率では、1ミリ秒の捕獲は約5000個のデータ標本を含む。256点のFFTは、捕獲、および平均される(または単純に合計される)結果にわたり繰り返されてよい。例えば、5000個の標本を所与として、256点のFFTは、標本1〜256に対して、次に標本257〜512に対して、3番目に標本513〜768に対して等、行われてよい。これらすべてのFFTの結果は合計され、ビンごとに約20の値の平均を提供する。捕獲全体(5000個の標本)に対して単一のFFTを実行することは可能だが、そのような大規模のFFTの計算的な複雑さは多くの場合かなり高い。
【0066】
最も大きい干渉を指示するために、FFT点間の最大振幅が取られてよい。この振幅が定義済みの閾値を上回る場合、完全な捕獲が信頼できるには干渉が大きすぎるとみなされる。閾値の選択は実装形態によって決まるが、典型的にはFFTにおける点の数、平均されるFFTの数、RFフロントエンドの特性などの要素に依拠する。閾値の目標は、通常の背景ノイズ(低)と、カメラの電子機器によって作り出される干渉(高)とを区別することである。オプションで、信号から十分に(例えば少なくとも0.5MHz離れて)分離した干渉は許容されてよい。したがって、予期されるGPS信号に近いFFTビンしか計算する必要がないことがある。さらなる代替策として、2つの閾値が使用されてよく、その閾値とはつまり(0.5MHz内の)帯域内干渉用に1つ、および(0.5MHzを超える)帯域外干渉用にもう1つである。
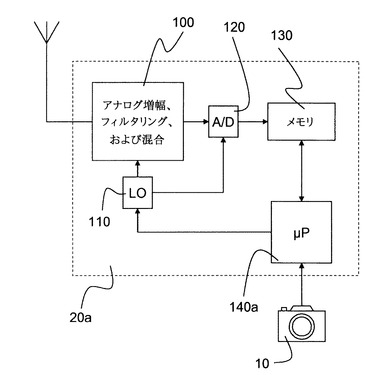
【0067】
図6は、FFTにより干渉を推定するGPS受信機20aの実施形態を示す。マイクロプロセッサ140aは、カメラ10からシャッターが切られるトリガ信号を受け取り、それに応じてフロントエンドを活動化する。フロントエンドは、アナログ増幅、フィルタリング、および混合ユニット100、ダウンミックスするために信号を供給する局部発振器(LO)110、および結果として生じるダウンミックスされたIF信号を標本化するアナログ−デジタル変換器(A/D)120を備える。当業者にはよく知られるように、これらはすべて、標準的なGPS受信機用の従来型のRFフロントエンド・コンポーネントである。アナログ−デジタル変換器(A/D)120によって出力されたIF標本は、上述のようにメモリ130に記憶される。マイクロプロセッサ140aが標本をメモリから取り出し、FFTを実行する。マイクロプロセッサは汎用プロセッサでよいが、好ましくはデジタル信号処理(DSP)操作に特化している。そうしたチップは、典型的には最適化されたオンボードFFT機能を提供する。FFTに基づいて、干渉が許容閾値を下回るとマイクロプロセッサが判定する場合、マイクロプロセッサはフロントエンドおよびメモリを制御して、「完全な」200ミリ秒の捕獲を記憶する。干渉が閾値を上回る場合、(ステップ66、68、および70に関して上記で論じたように)マイクロプロセッサは適切な休止の後、別のIFデータの短いバーストを捕獲し始める。
【0068】
干渉を推定するための別の方法は、受信される信号の標本を、プログラム可能な周波数源によって生み出される信号の標本と混合することである。この周波数源は、対象となっている中央周波数の正弦曲線(sinusoid)である基準信号を生成する。対象となっている周波数は、IFデータの標本内の衛星信号の予期される周波数に相当する。今度はこの周波数が、信号をダウンミックスする際に使用された局部発振器(LO)の周波数に依拠する。したがって、プログラム可能な周波数源の周波数はLOの周波数に関連して選択され、その結果、生成される信号の標本は、IF信号データのスペクトル内の、衛星信号の予期される位置と周波数について一致する。このようにして、混合操作は、衛星信号の予期される位置を中心とする周波数スペクトルの一部を調べる。干渉の大きさは、例えば混合操作の出力を単純に合計することによって決定されてよい。
【0069】
この、衛星周波数において干渉を検出するために混合することは、キャリア位相測定および符号位相測定中に相関関数を実行するために使用される、同じまたは同様のハードウェアによって有利には実行されてよい。それは、生成される基準信号の標本が、相関に使用される信号に一致するが、キャリア上に変調される特定の衛星の拡散符号には一致しないからである。したがって、所与のGPS受信機のハードウェアの実装形態にもよるが、相関器内の符号混合部を単純に無効にし、その符号混合部を、干渉を推定するのに適した装置に変えることが可能でよい。
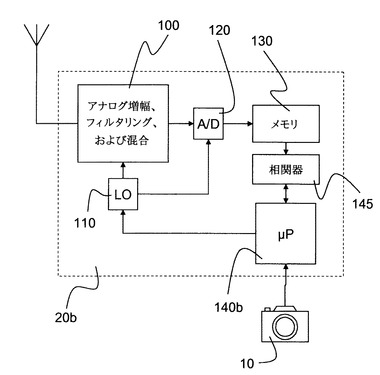
【0070】
図7は、この手法を実施するのに適したGPS受信機20bの実施形態を示す。図6の受信機20aに比べ、この受信機は、装置内の他のハードウェア・コンポーネントを主に制御するために使用される、より単純なプロセッサ140bを有する。干渉を推定すること64は、上述のように相関器145によって行われる。
【0071】
当業者には容易に明らかになるように、受信機と様々な衛星との相対運動に起因するドップラー効果を考慮に入れ、さらに実施上の局部発振器の周波数偏移に対するロバスト性を保証するために、様々な周波数において衛星信号を探索することが必要である。干渉を測定することにも同じ原理が当てはまる。したがって、衛星信号を得るために探索される周波数に相当する離散周波数群に中心がある干渉を検査することが有益な場合がある。干渉を検査することは、これらの離散周波数のそれぞれにおいて、正弦曲線の基準信号と混合することを含む。周波数計画の離散周波数を順に段階的に進む(step−through)ために、単一のプログラム可能な周波数源および混合器(つまり単一の相関器)が使用されてよい。これは図7の実施形態に当てはまる。あるいは、様々な中央周波数に関して異なる検査を同時に実施するために、複数の異なる相関器が使用されてよい。
【0072】
干渉が閾値を下回るまで待機する基本的手法は、オプションで様々な方法で増強されてよい。
【0073】
例えば、一部のカメラには、(例えばクロックの高調波に起因する)永続的な干渉源が存在することが観察されている。したがって、その時間により完全な捕獲が実行されなければならない、何らかの最大タイムアウト(例えば2秒)を設定することが有益な場合がある。さもなければ、干渉検出器は、閾値の基準を決して満たすことなく検査をいつまでも繰り返し得る。さらに、先に上述したように、遅延が長ければ長いほど、GPS信号のバーストが捕獲される前にユーザがカメラをしまう可能性がより高くなる。
【0074】
電力消費を節約する(およびそれにより電池寿命を延ばす)ために、最小遅延(例えば1秒)を設定し、それにより、干渉検査が1秒の遅延の後に最初にイネーブルにされることも有益な場合がある。これらの改変形態の両方を実装することで、シャッター後の1秒から2秒の間の何らかの時点で「完全な」捕獲が行われ、厳密なタイミングは検出される干渉によって決まる。
【0075】
この実施形態のさらなる改変形態では、GPS受信機は、経時的な干渉推定の履歴を記憶することができる。干渉推定の履歴を記憶することは、将来の捕獲のためのタイミングを調節するために、干渉水準についての前の観測を使用できるようにすることができる。
【0076】
例えば、既に記載した実施形態では、IFデータの標本の短いバーストが繰り返し捕獲される62ごとに、干渉の推定が生成される64。これらの推定のそれぞれが、メモリ130に記憶されてよい。最後の推定が所要の閾値を下回ることなく最大遅延が到達される場合、閾値の値を調節するために、記憶済みの推定の履歴が解析されてよい。このように閾値の値が調節されることは、次に写真が撮影されるとき、GPS信号の標本を捕獲する70タイミングが、よりよく最適化されることをうまくいけば保証する。つまり、タイムアウトが生じることは、現在の閾値の設定が現在の干渉の水準には低すぎることを指示するものとして理解されてよい。例として、新たな閾値は、観測される推定の平均として設定されてよい。干渉の水準の急落を探し求めるために、より複雑な解析が使用されてよい。より複雑な解析は、推定を2つのクラス(「高」干渉と「低」干渉)へと集団化すること、または連続した推定間の差異を解析し、最大の単一の下落に対応する閾値を選択することを含んでよい。
【0077】
推定の履歴を使用することにより、この方法は、前の写真のシャッター信号の後に以前測定された干渉の1つまたは複数の水準に基づいて、ある写真のための閾値が決定されることを可能にする。このようにして、このシステムは、経時的な干渉特性の変化または様々な写真のモードの変化に適応することができる。
【0078】
閾値が高すぎる場合、閾値を下げるために同様の原理が等しく使用されてよい。例えば、干渉の最初の推定が閾値を下回る場合、後続の写真のために閾値が下げられてよい。
【0079】
他の閾値も同様に変えられてよい。例えば、干渉の最初の推定が絶えず閾値を下回ることが分かる場合は最小遅延が減らされてよく、その理由は、それぞれのシャッター信号の後に最小遅延がシステムを長く待たせすぎている可能性があるからである。
【0080】
リアルタイムGPS受信機では、位置計算アルゴリズムからのフィードバックに基づいて閾値を適応させることが可能でよく、位置測定が可能な場合、位置測定が可能であることは干渉水準が許容できることを指示してよい。位置測定に失敗した場合、位置測定に失敗したことは干渉が大きすぎたことを指示してよい。当然、衛星の不鮮明な可視性などの他の要素も位置測定を計算する能力に影響し、これらの要素も考慮に入れられるべきである。
【0081】
GPS信号の標本の完全な(200ミリ秒の)捕獲にも干渉推定プロセスが適用される場合、捕獲して処理する受信機にも同様のフィードバック機構体が実装されてよい。この推定は、GPS受信機に搭載されて実行され、またはさらに処理するために、記憶された標本が別の装置に転送されるときに後で実行されてよい。いずれの場合にも、そうしたフィードバックは、シャッター信号の後のより遅い時点において活動状態になる干渉を識別するのに役立ってよい。遅い干渉源は、写真が撮影され、カメラのメモリに画像データが書き込まれた後に、カメラの表示画面を再活動化することなどのハードウェア事象を含んでよい。
【0082】
より長期の解析のために、捕獲されるGPS信号の標本(「完全な」捕獲)とともに、実際に使用される遅延および/または関連する閾値が記録されてよい。このように記録することは、この方法のためのロバストな平均のパラメータ群への収束を徐々に促進し得る。
【0083】
上記の説明から明らかなように、本発明は、リアルタイムの従来型GPSシステムおよび捕獲して処理するシステムに等しく適用可能である。本発明は、GPS衛星測位に限定されず、例えばグロナスやガリレオを含む他の任意の地球航法衛星システム(GNSS)に適用されてよいことも留意すべきである。
【0084】
「中間周波数」信号への言及は、ゼロ(またはほぼゼロ)の中間周波数を有すると単純にみなされる、直接変換衛星測位受信機の可能性を排除することを意図するものではない。したがって、「中間周波数」信号は、衛星周波数から何らかのより低い周波数へとダウンミックスされた信号を指し、ベースバンド拡散符号の回復を直接もたらしてよい。したがって「中間周波数」は、擬似距離を導き出すために必要なキャリア位相測定および符号位相測定を実行するための相関計算への信号入力の総称語である。
【0085】
他の様々な修正形態が、当業者には明らかになるであろう。
【特許請求の範囲】
【請求項1】
カメラによる第1の写真の捕獲の位置を推定するための衛星信号を受信する方法であって、
前記第1の写真の捕獲のタイミングに関係する信号を受信するステップと、
ゼロではない持続時間の間隔にわたり待機するステップと、
前記間隔の後、前記衛星信号を受信するステップと
を含む、方法。
【請求項2】
前記持続時間は、手動で調節することができる、請求項1に記載の方法。
【請求項3】
前記持続時間は、前記カメラのパラメータに基づいて、好ましくは自動的に決定される、請求項1または請求項2に記載の方法。
【請求項4】
前記第1の写真と同じ写真であろうと、前記第1の写真と異なる写真であろうと、第2の写真の前記捕獲に関連する電磁干渉を測定するステップをさらに含み、
前記間隔の前記持続時間は、前記測定される干渉に基づいて決定される、請求項3に記載の方法。
【請求項5】
前記電磁干渉を測定するステップは、
受信されるIF信号の標本のシーケンスに対してフーリエ変換を行うステップ、および
受信されるIF信号の標本のシーケンスを、対象となっている周波数において生成される信号の標本と混合するステップ
のうちの少なくとも一方を含む、請求項4に記載の方法。
【請求項6】
前記間隔の前記持続時間は、前記干渉の水準を繰り返しまたは継続的に測定することによって決定され、前記間隔は、前記測定される干渉の水準が閾値を下回るとすぐに終了する、請求項4または請求項5に記載の方法。
【請求項7】
前記閾値は、少なくとも1枚の以前の写真の前記捕獲に対応する、前に測定された干渉の水準に基づいて選択される、請求項6に記載の方法。
【請求項8】
前記衛星信号を受信するステップを、所定の回数繰り返すステップをさらに含む、請求項1から請求項7のいずれかに記載の方法。
【請求項9】
前記間隔の間、追加の写真の前記捕獲の前記タイミングに関係するさらなる信号を受信するステップと、
それに応じて前記間隔の前記持続時間を調節するステップと
をさらに含む、請求項1から請求項8のいずれかに記載の方法。
【請求項10】
前記持続時間を前記調節するステップは、前記間隔の前記持続時間を所定の量だけ長くすることを含む、請求項9に記載の方法。
【請求項11】
前記捕獲の位置を推定するための後の処理を可能にするよう、前記受信した衛星信号をメモリに記憶するステップをさらに含む、請求項1から請求項10のいずれかに記載の方法。
【請求項12】
衛星信号受信機器を構成する方法であって、
前記受信機器が関連するカメラのパラメータを受信するステップと、
前記受信したパラメータに基づいて、前記カメラによる写真の捕獲に関連する電磁干渉の期間の持続時間を自動的に決定するステップと、
前記決定した持続時間を前記受信機器に伝送するステップと
を含む、方法。
【請求項13】
写真の捕獲のタイミングに関係する信号を受信するための入力部と、
衛星信号を受信するための受信機と、
請求項1から請求項11のいずれかに記載の方法を実行するために前記機器を制御するようにされたプロセッサと
を備える、衛星信号受信機器。
【請求項14】
コンピュータ・プログラム符号手段を含むコンピュータ・プログラムであって、前記プログラムがコンピュータ上で実行されるとき、請求項1から請求項12のいずれかのすべてのステップを実行するようにされたコンピュータ・プログラム符号手段を含む、コンピュータ・プログラム。
【請求項15】
コンピュータ可読媒体上に組み込まれた、請求項14に記載のコンピュータ・プログラム。
【請求項1】
カメラによる第1の写真の捕獲の位置を推定するための衛星信号を受信する方法であって、
前記第1の写真の捕獲のタイミングに関係する信号を受信するステップと、
ゼロではない持続時間の間隔にわたり待機するステップと、
前記間隔の後、前記衛星信号を受信するステップと
を含む、方法。
【請求項2】
前記持続時間は、手動で調節することができる、請求項1に記載の方法。
【請求項3】
前記持続時間は、前記カメラのパラメータに基づいて、好ましくは自動的に決定される、請求項1または請求項2に記載の方法。
【請求項4】
前記第1の写真と同じ写真であろうと、前記第1の写真と異なる写真であろうと、第2の写真の前記捕獲に関連する電磁干渉を測定するステップをさらに含み、
前記間隔の前記持続時間は、前記測定される干渉に基づいて決定される、請求項3に記載の方法。
【請求項5】
前記電磁干渉を測定するステップは、
受信されるIF信号の標本のシーケンスに対してフーリエ変換を行うステップ、および
受信されるIF信号の標本のシーケンスを、対象となっている周波数において生成される信号の標本と混合するステップ
のうちの少なくとも一方を含む、請求項4に記載の方法。
【請求項6】
前記間隔の前記持続時間は、前記干渉の水準を繰り返しまたは継続的に測定することによって決定され、前記間隔は、前記測定される干渉の水準が閾値を下回るとすぐに終了する、請求項4または請求項5に記載の方法。
【請求項7】
前記閾値は、少なくとも1枚の以前の写真の前記捕獲に対応する、前に測定された干渉の水準に基づいて選択される、請求項6に記載の方法。
【請求項8】
前記衛星信号を受信するステップを、所定の回数繰り返すステップをさらに含む、請求項1から請求項7のいずれかに記載の方法。
【請求項9】
前記間隔の間、追加の写真の前記捕獲の前記タイミングに関係するさらなる信号を受信するステップと、
それに応じて前記間隔の前記持続時間を調節するステップと
をさらに含む、請求項1から請求項8のいずれかに記載の方法。
【請求項10】
前記持続時間を前記調節するステップは、前記間隔の前記持続時間を所定の量だけ長くすることを含む、請求項9に記載の方法。
【請求項11】
前記捕獲の位置を推定するための後の処理を可能にするよう、前記受信した衛星信号をメモリに記憶するステップをさらに含む、請求項1から請求項10のいずれかに記載の方法。
【請求項12】
衛星信号受信機器を構成する方法であって、
前記受信機器が関連するカメラのパラメータを受信するステップと、
前記受信したパラメータに基づいて、前記カメラによる写真の捕獲に関連する電磁干渉の期間の持続時間を自動的に決定するステップと、
前記決定した持続時間を前記受信機器に伝送するステップと
を含む、方法。
【請求項13】
写真の捕獲のタイミングに関係する信号を受信するための入力部と、
衛星信号を受信するための受信機と、
請求項1から請求項11のいずれかに記載の方法を実行するために前記機器を制御するようにされたプロセッサと
を備える、衛星信号受信機器。
【請求項14】
コンピュータ・プログラム符号手段を含むコンピュータ・プログラムであって、前記プログラムがコンピュータ上で実行されるとき、請求項1から請求項12のいずれかのすべてのステップを実行するようにされたコンピュータ・プログラム符号手段を含む、コンピュータ・プログラム。
【請求項15】
コンピュータ可読媒体上に組み込まれた、請求項14に記載のコンピュータ・プログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公表番号】特表2011−529193(P2011−529193A)
【公表日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願番号】特願2011−520592(P2011−520592)
【出願日】平成21年7月27日(2009.7.27)
【国際出願番号】PCT/GB2009/050922
【国際公開番号】WO2010/013034
【国際公開日】平成22年2月4日(2010.2.4)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(510112671)ユー‐ブロックス、アクチエンゲゼルシャフト (15)
【氏名又は名称原語表記】U−BLOX A.G.
【Fターム(参考)】
【公表日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願日】平成21年7月27日(2009.7.27)
【国際出願番号】PCT/GB2009/050922
【国際公開番号】WO2010/013034
【国際公開日】平成22年2月4日(2010.2.4)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(510112671)ユー‐ブロックス、アクチエンゲゼルシャフト (15)
【氏名又は名称原語表記】U−BLOX A.G.
【Fターム(参考)】
[ Back to top ]