
カメラシステム
【課題】故障に気づかず、無意味(不鮮明)な画像を撮像し続けることを防ぐことができ、また、運用を止めずに正常制御を継続することができるカメラシステムを提供する。
【解決手段】有料道路の料金所の料金収受車線を走行する車両の画像を撮像して記録するカメラシステムにおいて、各車線にそれぞれカメラが設置されている場合、カメラの露光制御が他のカメラとかけ離れた制御を行なっている場合、他の各カメラの露光制御パラメータの平均値を算出し、算出した平均値を当該カメラの露光制御パラメータとし、当該カメラの露光制御を行なう。
【解決手段】有料道路の料金所の料金収受車線を走行する車両の画像を撮像して記録するカメラシステムにおいて、各車線にそれぞれカメラが設置されている場合、カメラの露光制御が他のカメラとかけ離れた制御を行なっている場合、他の各カメラの露光制御パラメータの平均値を算出し、算出した平均値を当該カメラの露光制御パラメータとし、当該カメラの露光制御を行なう。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、たとえば、車両をノンストップで利用料金の収受処理を自動的に行なうETCシステム(ノンストップ自動料金収受システム)と称される料金収受システムにおいて、料金所の料金収受車線を走行する車両の画像を撮像して記録したり、あるいは、料金収受車線を走行する車両のナンバプレートを撮像し、得られる画像を処理することによりナンバプレート上の文字を認識したりするカメラシステムに関する。
【背景技術】
【0002】
現在、有料道路の料金所等における料金収受システムとして、ETCシステムの普及が進んでいる。これを利用する車両は、ETCカードを装着した専用の車載器を搭載し、料金収受車線の入(出)口等に設置されるETCアンテナ装置と無線通信によって自動課金等の料金収受処理を行なう。料金収受処理が正常に終了すると、通行レーン(料金収受車線)を閉じている発進制御装置の阻止バーが開き、車両はノンストップで通過できる。
【0003】
一般に、有料道路の料金所では、安全性の観点から、不正突破しようとする車両に対しても、あえて阻止能力を抑えている。通行ゲートとなる発進制御装置の阻止バーは、上下方向に開閉する構造になっているが、閉じた状態で車両進行方向に押し広げる(突破する)ことも可能で、約90度開いた位置で阻止バーがロックされる。また、瞬間的にある程度以上の力が加わると、阻止バー自体が折れる構造のため、走行中の車両を停止させる能力は持たせていない。
【0004】
このことを悪用し、車載器を搭載しないかあるいは故意にETCカードを車載器に挿入しないで課金されないまま料金所(閉じた阻止バー)を突破する不正車両が後を経たない。年間数億円にのぼる事業者側被害も甚大であるが、正規料金を支払って利用する大多数の利用者に対する不公正放置は社会問題となっている。
【0005】
これまで、正常課金されずに阻止バーを押し広げ(または破壊して)突破する車両があると、料金所の警報等で認識することはできたが、係員が対応にでた時点で既に走り去った後であり、特定できないケースが殆どだった。また、走行している突破車両を強制阻止することは、安全上の観点から問題であり、有効な対抗手段がなかった。
【0006】
そこで、最近、このような不正通行車両の不正の瞬間を証拠データとして記録しようとする動きが急となっている。そのため、料金収受車線に対し不正通行車両の画像を撮像して証拠データとして記録するカメラシステムが設置される場合がある(たとえば、特許文献1、特許文献2参照)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2003−271898号公報
【特許文献2】特開2004−336153号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
不正通行車両の画像を証拠データとして記録するカメラシステムは、24時間にわたって安定した動作を行なう性能が求められるため、カメラの適切な露光制御は重要なファクタとなる。これまで、露光制御の基になるセンシング情報が異常値であっても画像は撮像することはできるため、故障に気づかず、無意味(不鮮明)な画像を撮像し続けてしまう場合がある。また、異常とわかっても修理、交換に時間を要し、問題である。
【0009】
そこで、本発明は、故障に気づかず、無意味(不鮮明)な画像を撮像し続けることを防ぐことができ、また、運用を止めずに正常制御を継続することができるカメラシステムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明のカメラシステムは、車両が走行する道路の側部に設置され、当該道路を走行する車両の画像を撮像するもので、外部から露光制御パラメータを設定可能なカメラと、このカメラの近傍の照度情報を取得する照度情報取得手段と、この照度情報取得手段により取得された照度情報に基づき前記カメラの露光制御パラメータを決定する露光制御パラメータ決定手段と、前記カメラが複数台設置されている場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと他の各カメラの決定された露光制御パラメータとの相関関係を求める第1の相関関係算出手段と、この第1の相関関係算出手段により求めた相関関係において、相関関係から所定値以上離れる露光制御パラメータが存在する場合、前記他の各カメラの決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定し、相関関係から所定値以上離れる露光制御パラメータが存在しない場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第1の露光制御パラメータ設定手段と、前記カメラが単一の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の時間的に近傍の露光制御パラメータとの相関関係を求める第2の相関関係算出手段と、この第2の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、前記過去の時間的に近傍の露光制御パラメータに基づき前記カメラの露光制御パラメータを設定し、相関値が所定値以上の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第2の露光制御パラメータ設定手段と、前記カメラから得られる画像を用いて所定の画像処理を行なう画像処理手段とを具備している。
【0011】
また、本発明のカメラシステムは、車両が走行する道路の側部に設置され、当該道路を走行する車両の画像を撮像するもので、外部から露光制御パラメータを設定可能なカメラと、このカメラの近傍の照度情報を取得する照度情報取得手段と、この照度情報取得手段により取得された照度情報に基づき前記カメラの露光制御パラメータを決定する露光制御パラメータ決定手段と、この露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の時間的に近傍の露光制御パラメータとの相関関係を求める第1の相関関係算出手段と、この第1の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の同時期同天候時の露光制御パラメータとの相関関係を求める第2の相関関係算出手段と、この第2の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、当該カメラの過去の同時期同天候時の露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第1の露光制御パラメータ設定手段と、前記第1の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、あるいは、前記第2の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第2の露光制御パラメータ設定手段と、前記カメラから得られる画像を用いて所定の画像処理を行なう画像処理手段とを具備している。
【発明の効果】
【0012】
本発明によれば、故障に気づかず、無意味(不鮮明)な画像を撮像し続けることを防ぐことができ、また、運用を止めずに正常制御を継続することができるカメラシステムを提供できる。
【図面の簡単な説明】
【0013】
【図1】本発明に係るカメラシステムが適用される料金収受システムの構成を模式的に示すブロック図。
【図2】料金収受車線に対する各機器の配置状態を示す模式図。
【図3】第1の実施の形態に係る車線制御装置の露光制御パラメータ設定部分の構成を概略的に示すブロック図。
【図4】第1の実施の形態に係る露光制御パラメータ設定処理の手順について説明するフローチャート。
【図5】カメラが複数台設置されている場合の露光制御パラメータの具体例を示す図。
【図6】カメラが単一の場合の露光制御パラメータの具体例を示す図。
【図7】第2の実施の形態に係る車線制御装置の露光制御パラメータ設定部分の構成を概略的に示すブロック図。
【図8】第2の実施の形態に係る露光制御パラメータ設定処理の手順について説明するフローチャート。
【図9】時刻ごとの露光制御パラメータの具体例を示す図。
【図10】過去の同時期同天候時の露光制御パラメータの具体例を示す図。
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態について図面を参照して説明する。
まず、第1の実施の形態について説明する。
【0015】
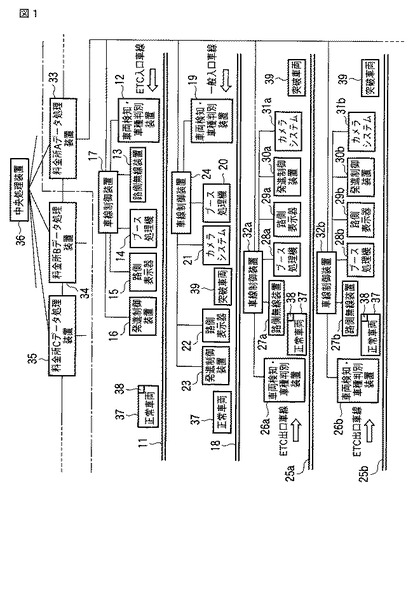
図1は、本発明に係るカメラシステムが適用されるETCシステム(ノンストップ自動料金収受システム)と称される料金収受システムの構成を模式的に示すものである。なお、図1の例では、1つのETC入口車線、1つの一般入口車線、2つのETC出口車線が設けられている場合を示しているが、車線の種類および数はこれらに限定されるものではない。
【0016】
図1において、たとえば、有料道路の料金所におけるETC入口車線11には、その入口側から順次、車両検知・車種判別装置12、路側無線装置13、ブース処理機14、路側表示器15、および、発信制御装置16がそれぞれ設置されていて、これらはETC入口の車線制御装置17にそれぞれ接続されている。
【0017】
また、一般入口車線18には、その入口側から順次、車両検知・車種判別装置19、ブース処理機20、カメラシステム21、路側表示器22、および、発進制御装置23がそれぞれ設置されていて、これらは一般入口の車線制御装置24にそれぞれ接続されている。
【0018】
さらに、ETC出口車線25a,25bには、その入口側から順次、車両検知・車種判別装置26a,26b、路側無線装置27a,27b、ブース処理機28a,28b、路側表示器29a,29b、発進制御装置30a,30b、および、カメラシステム31a,31bがそれぞれ設置されていて、これらはETC出口の車線制御装置32a,32bにそれぞれ接続されている。
【0019】
車線制御装置17,24,32a,32bは、それぞれ通信回線を介して当該料金所(料金所Aとする)のデータ処理装置33に接続されている。料金所Aデータ処理装置33は、通信回線を介して他の料金所(料金所B,C,…とする)のデータ処理装置34,35,…にそれぞれ接続されている。
データ処理装置33,34,35,…は、それぞれ通信回線を介して中央処理装置36に接続されている。
【0020】
以下、各部について詳細に説明する。
車両検知・車種判別装置12(19,26a,26b)は、車線制御装置17(24,32a,32b)との間でデータ送受信を行なう機能を持つとともに、
(a)通過する車両37を検知し、分離する車両分離機能、
(b)通過する車両37の軸数を検知する軸数検知機能、
(c)通過する車両37の車高および車長を検知する機能、
(d)通過する車両37の車両番号を認識する車両番号認識機能、
(e)これら(a),(b),(c),(d)の各機能の処理結果を総合して、車線に進入してくる車両37の車種(n種)を判別する車種判別機能、
(f)上記(a),(b),(c),(d)の各機能の処理結果を総合して、車線に進入してくる車両37の速度を測定する速度測定機能、
を持ち、上記(e),(f)の判別結果を対応する車線制御装置17(24,32a,32b)へ送信する機能を有する。
【0021】
路側無線装置13(27a,27b)は、無線通信用のアンテナを有し、通過する車両37に搭載された車載器(ETCカードが装着されている)38との間で無線通信によってデータの送受信を行なう機能と、車線制御装置17(32)との間でデータの送受信を行なう機能を持ち、
(a)電源投入時に車線制御装置17(32a,32b)との間で相互認証を行ない、その正当性を判定し、
(b)相互認証で正当と判定された場合、車線制御装置17(32a,32b)からのコマンドによって、車載器38との間で無線通信を行なってID情報(車載器固有の情報)のほか、正当性判定のためのデータを取得し、
(c)取得したデータを車線制御装置17(32a,32b)へ送信し、
(d)車線制御装置17(32a,32b)が総合判定を行ない、当該車載器(含むETCカード)38が正当と判定された場合に、車線制御装置17(32a,32b)からのコマンドによって、当該判定結果を車載器38へ書込み、
(g)書込んだ結果を当該車載器38から受信して、車線制御装置17(32a,32b)へ通知する、
機能を有する。
【0022】
ブース処理機14(20,28a,28b)は、有人ブース内に設置され、係員処理により車線制御装置17(24,32a,32b)と接続されて相互にデータ伝送を行なう機能を持ち、
(a)入線時に通行券を発行するか、もしくは、ETCカードに入線、課金情報等を書込むか、もしくは、現金処理を行なって領収書を発行し、
(b)出線時にETCカードに出線、課金情報を書込むか、もしくは、通行券情報等に基づいて現金処理を行ない、領収書を発行する、
機能を有する。
【0023】
路側表示器15(22,29a,29b)は、LED表示パネル等による表示機能を持ち、
(a)車線制御装置17(24,32a,32b)による総合判定結果、課金情報、発進/停止などの案内を行ない、
(b)不正突破の情報を車線制御装置17(24,32a,32b)から受信して、当該車両を特定する証拠画像データが記録された旨を警告表示する、
機能を有する。
【0024】
発進制御装置16(23,30a,30b)は、入口車線および出口車線上に固定設置され、車線制御装置17(24,32a,32b)との間でデータ送受信を行なう基本機能を持ち、
(a)車線制御装置17(24,32a,32b)からの車両停止指示あるいは車両通行許可を受信して、
(b)阻止バーを開閉し、
通行車両の停止、通過を制御する。
【0025】
車線制御装置17(24,32a,32b)は、路側無線装置13(27a,27b)、車両検知・車種判別装置12(19,26a,26b)、発進制御装置16(23,30a,30b)、カメラシステム21(31a,31b)などと接続され、これら各下位機器と相互にデータ伝送を行なう機能を持ち、
(a)各下位機器から送られる検知信号、データを総合判定し、
(b)その判定結果に基づいて、各下位機器に対し制御コマンドを送信し、
(c)不正突破発生の検知情報を受信して、後述する画像処理装置45へ記録トリガ信号を送信し、
(d)後述する画像処理装置45からの車両ナンバ情報および運転者画像データ等を受信して、
(e)当該車両情報(不正突破発生時の車両ナンバ情報および運転者画像データ等)を上位の料金所Aデータ処理装置33へ送信し、
(f)後述するカメラ41(43)の露光制御パラメータを決定して設定する、
機能を有する。
【0026】
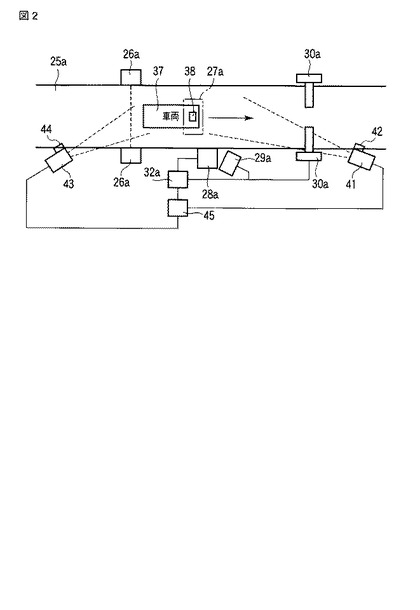
カメラシステム31a,31bは、たとえば、ETC出口車線25a,25bを走行する車両37の少なくともナンバプレートを含む画像を撮影し、得られる画像を記録したり、得られる画像を処理することによりナンバプレート上の文字を認識したり、あるいは、走行する車両37の少なくとも運転者の顔を含む画像を撮像して記録したりするもので、図2に示すように、前方カメラ41、前方カメラ41に設置された照度情報取得手段としての照度センサ42、後方カメラ43、後方カメラ43に設置された照度情報取得手段としての照度センサ44、および、これらのカメラ41,43が接続された画象処理手段としての画像処理装置45を有して構成される。
【0027】
なお、図2は、ETC出口車線25aに設置されたカメラシステム31aの場合を例として示しているが、ETC出口車線25b、一般入口車線18に設置されたカメラシステム31b,21の場合も同様な構成である。
【0028】
また、図2の例では、車両37の前方から見てETC出口車線25aの左側にカメラを設置した場合を示しているが、右側あるいは左右両側に設置される場合もある。さらに、設置されるカメラは、後方のみ、あるいは、前方のみの場合もある。
【0029】
前方カメラ41は、料金所(出口)のアイランド上などに設置され、ETC出口車線25a,25bを走行する車両37の運転席部分の画像を前方から撮像し、得られる画像を画像処理装置45へ出力する基本機能を持ち、
(a)カメラのアイリスを制御する機能、
(b)カメラの画像信号のゲインを制御する機能、
(c)カメラのシャッタスピードを制御する機能、
(d)照度センサ42から前方カメラ41近傍の照度情報を一定時間ごとに取得し、画像処理装置45を介して車線制御装置32a,32bへ送る機能、
(e)カメラの撮像タイミングに合わせて発光する照明ユニット、
を有する。
照度センサ42は、前方カメラ41の近傍の照度情報を取得し、前方カメラ41へ出力する機能を有する。
【0030】
後方カメラ43は、料金所(出口)のアイランド上などに設置され、ETC出口車線25a,25bを走行する車両37のナンバプレート部分の画像を後方から撮像し、得られる画像を画像処理装置45へ出力するもので、前方カメラ41と同様な機能を有しているので、その説明は省略する。
【0031】
照度センサ44は、後方カメラ43の近傍の照度情報を取得し、後方カメラ43へ出力する機能を有する。
【0032】
画像処理装置45は、前方カメラ41から得られる画像から少なくとも運転者の顔を含む画像を抽出して記録保持したり、後方カメラ43から得られる画像を記録したり、得られる画像を処理することによりナンバプレート上の文字を認識したりする基本機能と、これらのデータを保存する機能と、車線制御装置24,32a,32bとの間でデータ送受信を行なう基本機能を持ち、
(a)車線制御装置24,32a,32bからのトリガ信号を受信して、トリガ前後数秒から数十秒程度の撮像画像を記録保存し、トリガ記録の成否を車線制御装置24,32a,32bへ送信し、
(b)あるいは、24時間連続一定期間以上のデータをサイクリックに記録保存し、
(c)保存された画像データからナンバプレートの文字認識を行なって、その認識結果をデータベース化するとともに、車線制御装置24,32a,32bへ送信する機能、
を有する。
【0033】
データ処理装置33(34,35,…)は、料金所内の各車線制御装置17,24,32a,32bから送られてくるデータを収集し、各種照合および問い合わせ業務を行なう機能を持ち、
(a)上位の中央処理装置36へ収集データを送信し、
(b)通信回線を介して各料金所のデータ処理装置と相互にデータ伝送を行ない、
(c)車線制御装置17,24,32a,32bからの不正車両情報(画像情報、車両ナンバ等)を系統だって記録保管し、
(d)不正車両情報を中央処理装置36へ送信する、
機能を有する。
【0034】
中央処理装置36は、各料金所のデータ処理装置33,34,35,…から送られてくるデータを収集し、各種照合処理および問い合わせ業務等を行なう機能を有する。
【0035】
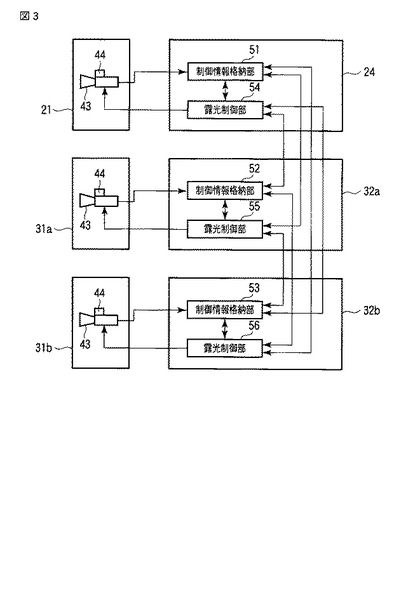
図3は、第1の実施の形態に係る車線制御装置24,32a,32bの露光制御パラメータ設定部分の構成を概略的に示している。すなわち、車線制御装置24,32a,32bは、カメラシステム21,31a,31bの後方カメラ43,43,43に設けられた照度センサ44,44,44から送られる照度情報に基づき後方カメラ43,43,43の露光制御パラメータ(たとえば、アイリス、ゲイン、シャッタスピード等)を決定する制御情報格納部51,52,53、および、制御情報格納部51,52,53で決定された露光制御パラメータに基づき後方カメラ43,43,43の露光制御パラメータを設定する露光制御部54,55,56を有している。制御情報格納部51,52,53は、他のカメラの露光制御部54,55,56との間で互いに通信可能に接続されている。
【0036】
なお、図3は、後方カメラ43,43,43に対する露光制御パラメータ設定部分にかかる部分だけを例として示しているが、前方カメラ41,41,41に対しても同様な構成となっている。
【0037】
次に、図1に示した料金収受システムの全体的な処理の流れについて簡単に説明する。
まず、通常の処理の流れについて説明する。
【0038】
ETC車載器38を搭載した車両37が、たとえばETC入口車線11へ進入すると、路側無線装置13の手前に設置される車両検知・車種判別装置12にて、進入してきた当該車両37を検知し、車種、車速を識別し、当該車線の車線制御装置17へ通知する。
【0039】
次に、当該車両37が路側無線装置13の通信可能エリアに入ったことが検知されると、路側無線装置13は、当該車両37の車載器38との間で無線通信を行なうことにより、所定の処理(車両の正当性を判定し、判定OKの場合に当該料金所の入場情報を書込む等)を行なう。
【0040】
次に、路側無線装置13は、車載器38に対して入場情報等を正常記録したことを確認し、それを車線制御装置17へ通知する。
このとき、なんらかの原因によりETC処理が正常に行なわれなかった場合、ブース処理機14により、通行券(入場証)を発行するか、もしくは、ETCカード処理を行なうか、もしくは、現金処理で料金収受を行なって領収書を発行する。その処理結果情報は、上位の車線制御装置17へ送信される。
【0041】
次に、車線制御装置17は、車両検知・車種判別装置12からの情報と、路側無線装置13からの情報との一致をとって、当該車両37の通過許可を発進制御装置16へ通知する。発進制御装置16は、車線制御装置17からの通過許可通知を受けると、阻止バーを開けて当該車両37の通過を許可する。
【0042】
次に、発進制御装置16が当該車両37の通過を確認し、その確認情報を車線制御装置17へ通知する。
【0043】
なお、出口料金所、つまり例えばETC出口車線25aにおいても同様の処理を行ない、車線制御装置32において入口と出口との間の利用料金を計算し、その利用料金を当該車両37の入出情報等とともに料金所Aデータ処理装置33を介して中央処理装置36へ送信することにより、中央制御装置36で集計して、クレジット会社へ通知される。
【0044】
また、ETC出口車線25aにおいては、カメラシステム31aの画像処理装置45は、正常課金された車両37が通過する場合は、前方カメラユニット41で撮像した車両画像は図示しないメモリ(RAM)上に一時記憶するだけで保存を行なわないか、あるいは、24時間連続で録画(撮像した車両画像の記録)を継続する。
【0045】
次に、不正突破発生時を含む撮像系の動作について説明する。
たとえば、ETC出口車線25aにおいて不正突破車両39が発生した場合、カメラシステム31aによりその瞬間を捉えて前後数秒から数十秒間程度の画像を記録するか、もしくは、全ての走行車両37の画像を24時間連続で録画する。「不正突破」の定義は幾つかのバリエーションを持たせることができ、車両ナンバや運転者等を確実に特定できる情報として認識し、記録、保管管理し、不正証拠データとする。
【0046】
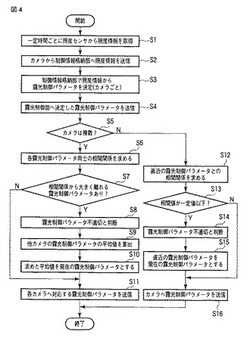
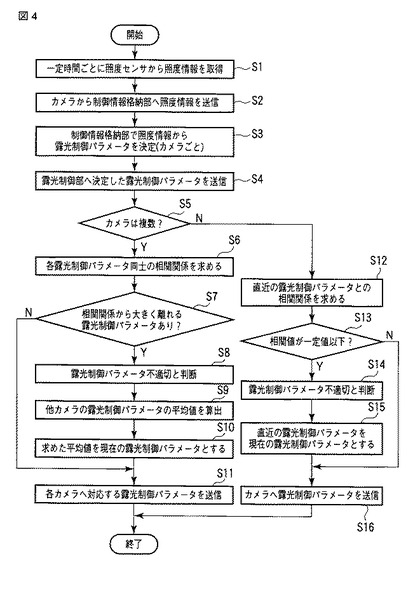
次に、カメラシステム21,31a,31bの後方カメラ43に対する露光制御パラメータ設定処理の手順について図4に示すフローチャートを参照して説明する。
【0047】
カメラシステム21,31a,31bの後方カメラ43は、一定時間(たとえば、1時間)ごとに照度センサ44から照度情報を取得し(ステップS1)、画像処理装置45を介して車線制御装置32a,32b内の制御情報格納部51,52,53へ送る(ステップS2)。
【0048】
制御情報格納部51,52,53は、照度センサ44からの照度情報に基づき各後方カメラ43に対する露光制御パラメータ(たとえば、アイリス、ゲイン、シャッタスピードなどのうち少なくとも1つ)を決定し(ステップS3)、露光制御部54,55,56へ送る(ステップS4)。
【0049】
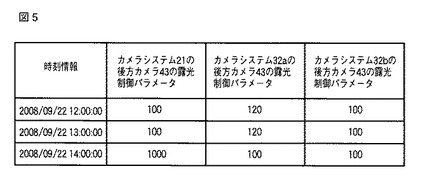
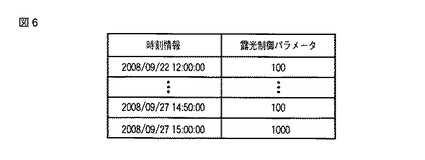
ここで、決定された後方カメラ43に対する露光制御パラメータの具体例を示すと図5、図6のようになり、制御情報格納部51,52,53内にテーブルデータとして格納される。図5は、後方カメラ43が複数台設置されている場合(図1の場合)で、たとえば、この例では1時間ごとに露光制御パラメータが決定される。図6は、後方カメラ43が単一の場合で、たとえば、この例では10分ごとに露光制御パラメータが決定される。
【0050】
次に、露光制御部54,55,56は、後方カメラ43の設置台数をチェックし(ステップS5)、後方カメラ43が複数台設置されている場合(図1の例の場合は3台)、ステップS3で決定された露光制御パラメータ(自カメラの露光制御パラメータ)と他の複数(図1の例の場合は2台)の後方カメラ43の決定された露光制御パラメータ(他カメラの露光制御パラメータ)との相関関係を求める(ステップS6)。
【0051】
次に、露光制御部54,55,56は、求めた相関関係から大きく離れる露光制御パラメータが存在するか否かをチェックし(ステップS7)、大きく離れる露光制御パラメータが存在する場合、自カメラの露光制御パラメータは不適切と判断し(ステップS8)、複数の他カメラの露光制御パラメータの平均値を算出し(ステップS9)、算出した平均値を当該後方カメラ43の露光制御パラメータとし(ステップS10)、当該後方カメラ43へ送信して設定する(ステップS11)。
【0052】
ステップS7におけるチェックの結果、大きく離れる露光制御パラメータが存在しない場合、ステップS8〜S10の処理をジャンプしてステップS11に進み、ステップS3で決定された露光制御パラメータを当該後方カメラ43へ送信して設定する。
【0053】
ここで、ステップS7における相関関係から大きく離れる露光制御パラメータの具体例について説明しておく。相関関係から大きく離れる露光制御パラメータとは、この例では、たとえば、10倍以上離れている(たとえば、露光制御パラメータが「100」の場合は「10」以下、「1000」以上)場合とする。
【0054】
図5の例で説明すれば、たとえば、カメラシステム21の後方カメラ43を対象とした場合、2008年9月19日14時の時点での決定された露光制御パラメータは「1000」で、他のカメラシステム31a,31bの後方カメラ43の決定された露光制御パラメータは「100」であり、両者を比較した場合、カメラシステム21の後方カメラ43の露光制御パラメータは値がかけ離れている。
【0055】
したがって、この場合は、他のカメラシステム31a,31bの後方カメラ43の露光制御パラメータの平均値(上記例では、100+100/2=100)を算出し、この算出した平均値「100」をカメラシステム21の後方カメラ43の露光制御パラメータとし、当該後方カメラ43へ送信して設定する。
【0056】
ステップS5におけるチェックの結果、後方カメラ43が単一の場合、露光制御部54(55,56)は、ステップS3で決定された露光制御パラメータと当該後方カメラ43の過去の時間的に近傍の露光制御パラメータとの相関関係を求める(ステップS12)。
【0057】
次に、露光制御部54(55,56)は、求めた相関関係の相関値が一定値以下か否かをチェックし(ステップS13)、一定値以下である場合、決定された露光制御パラメータは不適切と判断し(ステップS14)、過去の時間的に近傍の露光制御パラメータを当該後方カメラ43の露光制御パラメータとし(ステップS15)、当該後方カメラ43へ送信して設定する(ステップS16)。
【0058】
ステップS13におけるチェックの結果、相関値が一定値以下でない場合、ステップS14〜S15の処理をジャンプしてステップS16に進み、ステップS3で決定された露光制御パラメータを当該後方カメラ43へ送信して設定する。
【0059】
ここで、ステップS13における相関関係の相関値の具体例について説明しておく。この例では、たとえば、現在の露光制御パラメータと10倍以上離れている(たとえば、露光制御パラメータが「100」の場合は「10」以下、「1000」以上)場合、相関値が一定値以下とする。
【0060】
図6の例で説明すれば、たとえば、カメラシステム21のみが設置されているとした場合、2008年9月27日15時の時点での決定された露光制御パラメータ(現時点の露光制御パラメータ)は「1000」で、これと直近の時点である2008年9月27日14時50分の時点での露光制御パラメータは「100」であり、両者を比較した場合、現時点の後方カメラ43の露光制御パラメータは10倍以上離れているので、相関値が一定値以下と判定される。
【0061】
したがって、この場合は、直近の露光制御パラメータ「100」を当該後方カメラ43の露光制御パラメータとし、当該後方カメラ43へ送信して設定する。
【0062】
なお、上記説明では、後方カメラ43に対する露光制御パラメータの設定処理について述べたが、前方カメラ41に対する露光制御パラメータの設定処理も同様に行なわれるので、その説明は省略する。
【0063】
このように、たとえば、照度センサ等の照度情報取得系に異常が発生したことが原因で、決定された露光制御パラメータの値に異常が生じても、後方カメラが複数台設置されている場合は隣接車線の決定された露光制御パラメータ、あるいは、後方カメラが単一の場合は当該後方カメラの過去の直近時刻の露光制御パラメータと比較することで、異常を検知することができる。そのため、異常に気づかず、無意味(不鮮明)な画像を撮像し続けることを防ぐことができる。また、同情報を呼び出し、適用することで、運用を止めずに正常制御を継続することができる。
【0064】
次に、第2の実施の形態について説明する。
第2の実施の形態は、設置されたカメラが単一で、他のカメラの露光制御パラメータを取得できない場合に適用されるもので、以下の例では、たとえば、ETC出口車線25aに設置されたカメラシステム31aに適用した場合について説明する。
【0065】
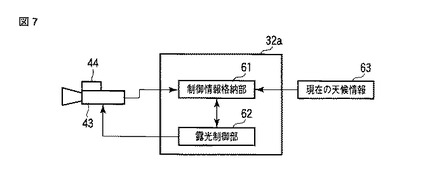
図7は、第2の実施の形態に係る車線制御装置32aの露光制御パラメータ設定部分の構成を概略的に示している。すなわち、車線制御装置32aは、カメラシステム31aの後方カメラ43に設けられた照度センサ44から送られる照度情報に基づき後方カメラ43の露光制御パラメータ(たとえば、アイリス、ゲイン、シャッタスピード等)を決定する制御情報格納部61、制御情報格納部61で決定された露光制御パラメータに基づき後方カメラ43の露光制御パラメータを設定する露光制御部62、および、現在の天候情報を供給する天候情報供給部63を有している。
【0066】
なお、図3は、後方カメラ43に対する露光制御パラメータ設定部分にかかる部分だけを例として示しているが、前方カメラ41に対しても同様な構成となっている。
【0067】
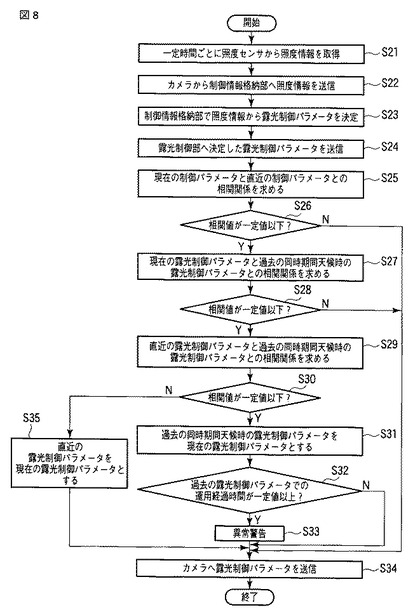
次に、カメラシステム31aの後方カメラ43に対する露光制御パラメータ設定処理の手順について図8に示すフローチャートを参照して説明する。
【0068】
カメラシステム31aの後方カメラ43は、一定時間(たとえば、10分)ごとに照度センサ44から照度情報を取得し(ステップS21)、画像処理装置45を介して車線制御装置32a内の制御情報格納部61へ送る(ステップS22)。
【0069】
制御情報格納部61は、照度センサ44からの照度情報に基づき各後方カメラ43に対する露光制御パラメータ(たとえば、アイリス、ゲイン、シャッタスピードなどのうち少なくとも1つ)を決定し(ステップS23)、露光制御部62へ送る(ステップS24)。
【0070】
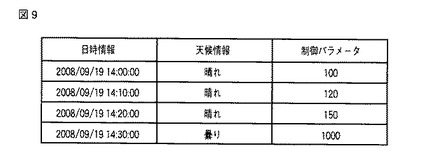
ここで、決定された後方カメラ43に対する露光制御パラメータの具体例を示すと図9のようになり、たとえば、この例では10分ごとに露光制御パラメータが決定され、その時点の天候情報も付加されていて、制御情報格納部61内にテーブルデータとして格納される。なお、天候情報は、天候情報供給部63から供給される天候情報を参照することで取得される。
【0071】
露光制御部62は、ステップS23で決定された露光制御パラメータ(現時点の露光制御パラメータ)と当該後方カメラ43の過去の時間的に近傍の露光制御パラメータとの相関関係を求める(ステップS25)。
【0072】
次に、露光制御部62は、求めた相関関係の相関値が一定値以下か否かをチェックし(ステップS26)、一定値以下である場合、現時点の露光制御パラメータと当該後方カメラ43の過去の同時期同天候時の露光制御パラメータとの相関関係を求める(ステップS27)。
【0073】
ここで、ステップS26における相関関係の相関値の具体例について説明しておく。この例では、たとえば、現在の露光制御パラメータと10倍以上離れている(たとえば、露光制御パラメータが「100」の場合は「10」以下、「1000」以上)場合、相関値が一定値以下とする。
【0074】
図9の例で説明すれば、たとえば、2008年9月19日14時30分の時点での決定された露光制御パラメータ(現時点の露光制御パラメータ)は「1000」で、これと直近の時点である2008年9月19日14時20分の時点での露光制御パラメータは「100」であり、両者を比較した場合、10倍以上離れているので、相関値が一定値以下と判定される。
【0075】
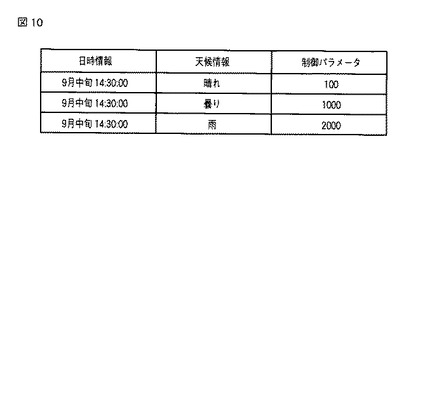
ここで、過去の同時期同天候時の露光制御パラメータの具体例を示すと図10のようになり、天候情報も付加されていて、制御情報格納部61内にテーブルデータとして格納されているものとする。
【0076】
次に、露光制御部62は、求めた相関関係の相関値が一定値以下か否かをチェックし(ステップS28)、一定値以下である場合、当該後方カメラ43の過去の時間的に近傍の露光制御パラメータと当該後方カメラ43の過去の同時期同天候時の露光制御パラメータとの相関関係を求める(ステップS29)。
【0077】
ここで、ステップS28における相関関係の相関値の具体例について説明しておく。この例では、たとえば、現在の露光制御パラメータと10倍以上離れている(たとえば、露光制御パラメータが「100」の場合は「10」以下、「1000」以上)場合、相関値が一定値以下とする。
【0078】
図9、図10の例で説明すれば、たとえば、2008年9月19日14時30分の時点での決定された天候および露光制御パラメータ(現時点の露光制御パラメータ)は「曇り、1000」で、これと同時期同天候時である9月中旬14時30分(曇り)の露光制御パラメータは「1000」であり、両者を比較した場合、一致するので、相関値は一定値以下でないと判定される。
【0079】
次に、露光制御部62は、求めた相関関係の相関値が一定値以下か否かをチェックし(ステップS30)、一定値以下である場合、当該後方カメラ43の過去の同時期同天候時の露光制御パラメータを当該後方カメラ43の現在の露光制御パラメータとする(ステップS31)。
【0080】
ここで、ステップS30における相関関係の相関値の具体例について説明しておく。この例では、たとえば、時間的に近傍の露光制御パラメータと10倍以上離れている(たとえば、露光制御パラメータが「100」の場合は「10」以下、「1000」以上)場合、相関値が一定値以下とする。
【0081】
図9、図10の例で説明すれば、たとえば、2008年9月19日14時30分の時点での決定された天候および露光制御パラメータ(現時点の露光制御パラメータ)は「曇り、1000」で、これと直近の時点である2008年9月19日14時20分の時点での露光制御パラメータは「晴れ、150」で、これと同時期同天候時である9月中旬14時30分(晴れ)の露光制御パラメータは「100」であり、両者を比較した場合、10倍以上離れていないので、相関値は一定値以下でないと判定される。
【0082】
次に、露光制御部62は、過去の同時期同天候時の露光制御パラメータでの運用経過時間が一定値以上か否かをチェックし(ステップS32)、一定値以上であれば、図示しないディスプレイや音声案内装置等を用いて、照度センサ44の異常(たとえば、故障)などとして異常警報を出力し(ステップS33)、その後、ステップS31で決定した露光制御パラメータ(過去の同時期同天候時の露光制御パラメータ)を当該後方カメラ43へ送信して設定する(ステップS34)。
【0083】
ステップS32におけるチェックの結果、過去の同時期同天候時の露光制御パラメータでの運用経過時間が一定値以上でない場合、露光制御部62は、ステップS33の処理をジャンプしてステップS34に進み、ステップS31で決定した露光制御パラメータ(過去の同時期同天候時の露光制御パラメータ)を当該後方カメラ43へ送信して設定する。
【0084】
ステップS30におけるチェックの結果、相関値が一定値以下でない場合、露光制御部62は、当該後方カメラ43の過去の時間的に近傍の露光制御パラメータを当該後方カメラ43の現在の露光制御パラメータとし(ステップS35)、当該後方カメラ43へ送信して設定する(ステップS34)。
【0085】
ステップS26あるいはS28におけるチェックの結果、相関値が一定値以下でない場合、ステップS34に進み、ステップS23で決定された露光制御パラメータを当該後方カメラ43へ送信して設定する。
【0086】
なお、上記説明では、後方カメラ43に対する露光制御パラメータの設定処理について述べたが、前方カメラ41に対する露光制御パラメータの設定処理も同様に行なわれるので、その説明は省略する。
【0087】
このように、たとえば、照度センサ等の照度情報取得系に異常が発生したことが原因で、決定された露光制御パラメータの値に異常が生じても、当該後方カメラの過去の直近時刻あるいは過去の同時期同天候時の露光制御パラメータと比較することで、異常を検知することができる。そのため、異常に気づかず、無意味(不鮮明)な画像を撮像し続けることを防ぐことができる。また、同情報を呼び出し、適用することで、運用を止めずに正常制御を継続することができる。
【0088】
具体的に説明すると、たとえば、図9に示すような露光制御パラメータを取得したとする。ここで、10分ごとに露光制御パラメータを送信しているとする。2008年9月19日14時30分の時点での露光制御パラメータは、これと直近の2008年9月19日14時20分の露光制御パラメータと比較した場合、値がかけ離れている。しかし、直近の露光制御パラメータと現在の露光制御パラメータとの比較しか行なわない場合、天候や日の出、日の入りによる露光制御パラメータの急激な変化と照度センサの故障との区別がつかない。
【0089】
そこで、図10に示すような過去の同時期同天候時の露光制御パラメータと現在の露光制御パラメータとを比較することにより、天候、日の出、日の入りによる露光制御パラメータの急激な変化を異常と認識することを防ぐことができる。
【0090】
また、照度センサの故障時でも、過去の同時期同天候時の露光制御パラメータを使用することにより、直近の露光制御パラメータを用いての運用では対応できない昼間→夜間等の急激な露光制御パラメータの変化にも対応することができる。
【0091】
さらに、一定時間以上、直近の露光制御パラメータ、現在の露光制御パラメータ、過去の同時期同天候時の露光制御パラメータの相関値が一定値以下の場合(一定時間以上、過去の露光制御パラメータを使い続けていた場合)、照度センサ系統の異常として警告を出力する。これは、急激な露光制御パラメータの変化が起こらない状況(たとえば、夜間等)において、露光制御パラメータの相関値が一定値以下になり続ける場合、照度センサの異常の可能性が高いからである。
【符号の説明】
【0092】
11…ETC入口車線、12…車両検知・車種判別装置、13…路側無線装置、16…発進制御装置、17…車線制御装置、18…一般入口車線18、19…車両検知・車種判別装置、21…カメラシステム、23…発進制御装置、24…車線制御装置、25a,25b…ETC出口車線、26a,26b…車両検知・車種判別装置、27a,27b…路側無線装置、30a,30b…発進制御装置、31a,31b…カメラシステム、32a,32b…車線制御装置、37…車両、38…車載器、41…前方カメラ、42…照度センサ(照度情報取得手段)、43…後方カメラ、44…照度センサ(照度情報取得手段)、45…画像処理装置(画像処理手段)、51,52,53,61…制御情報格納部、54,55,56,62…露光制御部、63…天候情報供給部。
【技術分野】
【0001】
本発明は、たとえば、車両をノンストップで利用料金の収受処理を自動的に行なうETCシステム(ノンストップ自動料金収受システム)と称される料金収受システムにおいて、料金所の料金収受車線を走行する車両の画像を撮像して記録したり、あるいは、料金収受車線を走行する車両のナンバプレートを撮像し、得られる画像を処理することによりナンバプレート上の文字を認識したりするカメラシステムに関する。
【背景技術】
【0002】
現在、有料道路の料金所等における料金収受システムとして、ETCシステムの普及が進んでいる。これを利用する車両は、ETCカードを装着した専用の車載器を搭載し、料金収受車線の入(出)口等に設置されるETCアンテナ装置と無線通信によって自動課金等の料金収受処理を行なう。料金収受処理が正常に終了すると、通行レーン(料金収受車線)を閉じている発進制御装置の阻止バーが開き、車両はノンストップで通過できる。
【0003】
一般に、有料道路の料金所では、安全性の観点から、不正突破しようとする車両に対しても、あえて阻止能力を抑えている。通行ゲートとなる発進制御装置の阻止バーは、上下方向に開閉する構造になっているが、閉じた状態で車両進行方向に押し広げる(突破する)ことも可能で、約90度開いた位置で阻止バーがロックされる。また、瞬間的にある程度以上の力が加わると、阻止バー自体が折れる構造のため、走行中の車両を停止させる能力は持たせていない。
【0004】
このことを悪用し、車載器を搭載しないかあるいは故意にETCカードを車載器に挿入しないで課金されないまま料金所(閉じた阻止バー)を突破する不正車両が後を経たない。年間数億円にのぼる事業者側被害も甚大であるが、正規料金を支払って利用する大多数の利用者に対する不公正放置は社会問題となっている。
【0005】
これまで、正常課金されずに阻止バーを押し広げ(または破壊して)突破する車両があると、料金所の警報等で認識することはできたが、係員が対応にでた時点で既に走り去った後であり、特定できないケースが殆どだった。また、走行している突破車両を強制阻止することは、安全上の観点から問題であり、有効な対抗手段がなかった。
【0006】
そこで、最近、このような不正通行車両の不正の瞬間を証拠データとして記録しようとする動きが急となっている。そのため、料金収受車線に対し不正通行車両の画像を撮像して証拠データとして記録するカメラシステムが設置される場合がある(たとえば、特許文献1、特許文献2参照)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2003−271898号公報
【特許文献2】特開2004−336153号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
不正通行車両の画像を証拠データとして記録するカメラシステムは、24時間にわたって安定した動作を行なう性能が求められるため、カメラの適切な露光制御は重要なファクタとなる。これまで、露光制御の基になるセンシング情報が異常値であっても画像は撮像することはできるため、故障に気づかず、無意味(不鮮明)な画像を撮像し続けてしまう場合がある。また、異常とわかっても修理、交換に時間を要し、問題である。
【0009】
そこで、本発明は、故障に気づかず、無意味(不鮮明)な画像を撮像し続けることを防ぐことができ、また、運用を止めずに正常制御を継続することができるカメラシステムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明のカメラシステムは、車両が走行する道路の側部に設置され、当該道路を走行する車両の画像を撮像するもので、外部から露光制御パラメータを設定可能なカメラと、このカメラの近傍の照度情報を取得する照度情報取得手段と、この照度情報取得手段により取得された照度情報に基づき前記カメラの露光制御パラメータを決定する露光制御パラメータ決定手段と、前記カメラが複数台設置されている場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと他の各カメラの決定された露光制御パラメータとの相関関係を求める第1の相関関係算出手段と、この第1の相関関係算出手段により求めた相関関係において、相関関係から所定値以上離れる露光制御パラメータが存在する場合、前記他の各カメラの決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定し、相関関係から所定値以上離れる露光制御パラメータが存在しない場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第1の露光制御パラメータ設定手段と、前記カメラが単一の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の時間的に近傍の露光制御パラメータとの相関関係を求める第2の相関関係算出手段と、この第2の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、前記過去の時間的に近傍の露光制御パラメータに基づき前記カメラの露光制御パラメータを設定し、相関値が所定値以上の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第2の露光制御パラメータ設定手段と、前記カメラから得られる画像を用いて所定の画像処理を行なう画像処理手段とを具備している。
【0011】
また、本発明のカメラシステムは、車両が走行する道路の側部に設置され、当該道路を走行する車両の画像を撮像するもので、外部から露光制御パラメータを設定可能なカメラと、このカメラの近傍の照度情報を取得する照度情報取得手段と、この照度情報取得手段により取得された照度情報に基づき前記カメラの露光制御パラメータを決定する露光制御パラメータ決定手段と、この露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の時間的に近傍の露光制御パラメータとの相関関係を求める第1の相関関係算出手段と、この第1の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の同時期同天候時の露光制御パラメータとの相関関係を求める第2の相関関係算出手段と、この第2の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、当該カメラの過去の同時期同天候時の露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第1の露光制御パラメータ設定手段と、前記第1の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、あるいは、前記第2の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第2の露光制御パラメータ設定手段と、前記カメラから得られる画像を用いて所定の画像処理を行なう画像処理手段とを具備している。
【発明の効果】
【0012】
本発明によれば、故障に気づかず、無意味(不鮮明)な画像を撮像し続けることを防ぐことができ、また、運用を止めずに正常制御を継続することができるカメラシステムを提供できる。
【図面の簡単な説明】
【0013】
【図1】本発明に係るカメラシステムが適用される料金収受システムの構成を模式的に示すブロック図。
【図2】料金収受車線に対する各機器の配置状態を示す模式図。
【図3】第1の実施の形態に係る車線制御装置の露光制御パラメータ設定部分の構成を概略的に示すブロック図。
【図4】第1の実施の形態に係る露光制御パラメータ設定処理の手順について説明するフローチャート。
【図5】カメラが複数台設置されている場合の露光制御パラメータの具体例を示す図。
【図6】カメラが単一の場合の露光制御パラメータの具体例を示す図。
【図7】第2の実施の形態に係る車線制御装置の露光制御パラメータ設定部分の構成を概略的に示すブロック図。
【図8】第2の実施の形態に係る露光制御パラメータ設定処理の手順について説明するフローチャート。
【図9】時刻ごとの露光制御パラメータの具体例を示す図。
【図10】過去の同時期同天候時の露光制御パラメータの具体例を示す図。
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態について図面を参照して説明する。
まず、第1の実施の形態について説明する。
【0015】
図1は、本発明に係るカメラシステムが適用されるETCシステム(ノンストップ自動料金収受システム)と称される料金収受システムの構成を模式的に示すものである。なお、図1の例では、1つのETC入口車線、1つの一般入口車線、2つのETC出口車線が設けられている場合を示しているが、車線の種類および数はこれらに限定されるものではない。
【0016】
図1において、たとえば、有料道路の料金所におけるETC入口車線11には、その入口側から順次、車両検知・車種判別装置12、路側無線装置13、ブース処理機14、路側表示器15、および、発信制御装置16がそれぞれ設置されていて、これらはETC入口の車線制御装置17にそれぞれ接続されている。
【0017】
また、一般入口車線18には、その入口側から順次、車両検知・車種判別装置19、ブース処理機20、カメラシステム21、路側表示器22、および、発進制御装置23がそれぞれ設置されていて、これらは一般入口の車線制御装置24にそれぞれ接続されている。
【0018】
さらに、ETC出口車線25a,25bには、その入口側から順次、車両検知・車種判別装置26a,26b、路側無線装置27a,27b、ブース処理機28a,28b、路側表示器29a,29b、発進制御装置30a,30b、および、カメラシステム31a,31bがそれぞれ設置されていて、これらはETC出口の車線制御装置32a,32bにそれぞれ接続されている。
【0019】
車線制御装置17,24,32a,32bは、それぞれ通信回線を介して当該料金所(料金所Aとする)のデータ処理装置33に接続されている。料金所Aデータ処理装置33は、通信回線を介して他の料金所(料金所B,C,…とする)のデータ処理装置34,35,…にそれぞれ接続されている。
データ処理装置33,34,35,…は、それぞれ通信回線を介して中央処理装置36に接続されている。
【0020】
以下、各部について詳細に説明する。
車両検知・車種判別装置12(19,26a,26b)は、車線制御装置17(24,32a,32b)との間でデータ送受信を行なう機能を持つとともに、
(a)通過する車両37を検知し、分離する車両分離機能、
(b)通過する車両37の軸数を検知する軸数検知機能、
(c)通過する車両37の車高および車長を検知する機能、
(d)通過する車両37の車両番号を認識する車両番号認識機能、
(e)これら(a),(b),(c),(d)の各機能の処理結果を総合して、車線に進入してくる車両37の車種(n種)を判別する車種判別機能、
(f)上記(a),(b),(c),(d)の各機能の処理結果を総合して、車線に進入してくる車両37の速度を測定する速度測定機能、
を持ち、上記(e),(f)の判別結果を対応する車線制御装置17(24,32a,32b)へ送信する機能を有する。
【0021】
路側無線装置13(27a,27b)は、無線通信用のアンテナを有し、通過する車両37に搭載された車載器(ETCカードが装着されている)38との間で無線通信によってデータの送受信を行なう機能と、車線制御装置17(32)との間でデータの送受信を行なう機能を持ち、
(a)電源投入時に車線制御装置17(32a,32b)との間で相互認証を行ない、その正当性を判定し、
(b)相互認証で正当と判定された場合、車線制御装置17(32a,32b)からのコマンドによって、車載器38との間で無線通信を行なってID情報(車載器固有の情報)のほか、正当性判定のためのデータを取得し、
(c)取得したデータを車線制御装置17(32a,32b)へ送信し、
(d)車線制御装置17(32a,32b)が総合判定を行ない、当該車載器(含むETCカード)38が正当と判定された場合に、車線制御装置17(32a,32b)からのコマンドによって、当該判定結果を車載器38へ書込み、
(g)書込んだ結果を当該車載器38から受信して、車線制御装置17(32a,32b)へ通知する、
機能を有する。
【0022】
ブース処理機14(20,28a,28b)は、有人ブース内に設置され、係員処理により車線制御装置17(24,32a,32b)と接続されて相互にデータ伝送を行なう機能を持ち、
(a)入線時に通行券を発行するか、もしくは、ETCカードに入線、課金情報等を書込むか、もしくは、現金処理を行なって領収書を発行し、
(b)出線時にETCカードに出線、課金情報を書込むか、もしくは、通行券情報等に基づいて現金処理を行ない、領収書を発行する、
機能を有する。
【0023】
路側表示器15(22,29a,29b)は、LED表示パネル等による表示機能を持ち、
(a)車線制御装置17(24,32a,32b)による総合判定結果、課金情報、発進/停止などの案内を行ない、
(b)不正突破の情報を車線制御装置17(24,32a,32b)から受信して、当該車両を特定する証拠画像データが記録された旨を警告表示する、
機能を有する。
【0024】
発進制御装置16(23,30a,30b)は、入口車線および出口車線上に固定設置され、車線制御装置17(24,32a,32b)との間でデータ送受信を行なう基本機能を持ち、
(a)車線制御装置17(24,32a,32b)からの車両停止指示あるいは車両通行許可を受信して、
(b)阻止バーを開閉し、
通行車両の停止、通過を制御する。
【0025】
車線制御装置17(24,32a,32b)は、路側無線装置13(27a,27b)、車両検知・車種判別装置12(19,26a,26b)、発進制御装置16(23,30a,30b)、カメラシステム21(31a,31b)などと接続され、これら各下位機器と相互にデータ伝送を行なう機能を持ち、
(a)各下位機器から送られる検知信号、データを総合判定し、
(b)その判定結果に基づいて、各下位機器に対し制御コマンドを送信し、
(c)不正突破発生の検知情報を受信して、後述する画像処理装置45へ記録トリガ信号を送信し、
(d)後述する画像処理装置45からの車両ナンバ情報および運転者画像データ等を受信して、
(e)当該車両情報(不正突破発生時の車両ナンバ情報および運転者画像データ等)を上位の料金所Aデータ処理装置33へ送信し、
(f)後述するカメラ41(43)の露光制御パラメータを決定して設定する、
機能を有する。
【0026】
カメラシステム31a,31bは、たとえば、ETC出口車線25a,25bを走行する車両37の少なくともナンバプレートを含む画像を撮影し、得られる画像を記録したり、得られる画像を処理することによりナンバプレート上の文字を認識したり、あるいは、走行する車両37の少なくとも運転者の顔を含む画像を撮像して記録したりするもので、図2に示すように、前方カメラ41、前方カメラ41に設置された照度情報取得手段としての照度センサ42、後方カメラ43、後方カメラ43に設置された照度情報取得手段としての照度センサ44、および、これらのカメラ41,43が接続された画象処理手段としての画像処理装置45を有して構成される。
【0027】
なお、図2は、ETC出口車線25aに設置されたカメラシステム31aの場合を例として示しているが、ETC出口車線25b、一般入口車線18に設置されたカメラシステム31b,21の場合も同様な構成である。
【0028】
また、図2の例では、車両37の前方から見てETC出口車線25aの左側にカメラを設置した場合を示しているが、右側あるいは左右両側に設置される場合もある。さらに、設置されるカメラは、後方のみ、あるいは、前方のみの場合もある。
【0029】
前方カメラ41は、料金所(出口)のアイランド上などに設置され、ETC出口車線25a,25bを走行する車両37の運転席部分の画像を前方から撮像し、得られる画像を画像処理装置45へ出力する基本機能を持ち、
(a)カメラのアイリスを制御する機能、
(b)カメラの画像信号のゲインを制御する機能、
(c)カメラのシャッタスピードを制御する機能、
(d)照度センサ42から前方カメラ41近傍の照度情報を一定時間ごとに取得し、画像処理装置45を介して車線制御装置32a,32bへ送る機能、
(e)カメラの撮像タイミングに合わせて発光する照明ユニット、
を有する。
照度センサ42は、前方カメラ41の近傍の照度情報を取得し、前方カメラ41へ出力する機能を有する。
【0030】
後方カメラ43は、料金所(出口)のアイランド上などに設置され、ETC出口車線25a,25bを走行する車両37のナンバプレート部分の画像を後方から撮像し、得られる画像を画像処理装置45へ出力するもので、前方カメラ41と同様な機能を有しているので、その説明は省略する。
【0031】
照度センサ44は、後方カメラ43の近傍の照度情報を取得し、後方カメラ43へ出力する機能を有する。
【0032】
画像処理装置45は、前方カメラ41から得られる画像から少なくとも運転者の顔を含む画像を抽出して記録保持したり、後方カメラ43から得られる画像を記録したり、得られる画像を処理することによりナンバプレート上の文字を認識したりする基本機能と、これらのデータを保存する機能と、車線制御装置24,32a,32bとの間でデータ送受信を行なう基本機能を持ち、
(a)車線制御装置24,32a,32bからのトリガ信号を受信して、トリガ前後数秒から数十秒程度の撮像画像を記録保存し、トリガ記録の成否を車線制御装置24,32a,32bへ送信し、
(b)あるいは、24時間連続一定期間以上のデータをサイクリックに記録保存し、
(c)保存された画像データからナンバプレートの文字認識を行なって、その認識結果をデータベース化するとともに、車線制御装置24,32a,32bへ送信する機能、
を有する。
【0033】
データ処理装置33(34,35,…)は、料金所内の各車線制御装置17,24,32a,32bから送られてくるデータを収集し、各種照合および問い合わせ業務を行なう機能を持ち、
(a)上位の中央処理装置36へ収集データを送信し、
(b)通信回線を介して各料金所のデータ処理装置と相互にデータ伝送を行ない、
(c)車線制御装置17,24,32a,32bからの不正車両情報(画像情報、車両ナンバ等)を系統だって記録保管し、
(d)不正車両情報を中央処理装置36へ送信する、
機能を有する。
【0034】
中央処理装置36は、各料金所のデータ処理装置33,34,35,…から送られてくるデータを収集し、各種照合処理および問い合わせ業務等を行なう機能を有する。
【0035】
図3は、第1の実施の形態に係る車線制御装置24,32a,32bの露光制御パラメータ設定部分の構成を概略的に示している。すなわち、車線制御装置24,32a,32bは、カメラシステム21,31a,31bの後方カメラ43,43,43に設けられた照度センサ44,44,44から送られる照度情報に基づき後方カメラ43,43,43の露光制御パラメータ(たとえば、アイリス、ゲイン、シャッタスピード等)を決定する制御情報格納部51,52,53、および、制御情報格納部51,52,53で決定された露光制御パラメータに基づき後方カメラ43,43,43の露光制御パラメータを設定する露光制御部54,55,56を有している。制御情報格納部51,52,53は、他のカメラの露光制御部54,55,56との間で互いに通信可能に接続されている。
【0036】
なお、図3は、後方カメラ43,43,43に対する露光制御パラメータ設定部分にかかる部分だけを例として示しているが、前方カメラ41,41,41に対しても同様な構成となっている。
【0037】
次に、図1に示した料金収受システムの全体的な処理の流れについて簡単に説明する。
まず、通常の処理の流れについて説明する。
【0038】
ETC車載器38を搭載した車両37が、たとえばETC入口車線11へ進入すると、路側無線装置13の手前に設置される車両検知・車種判別装置12にて、進入してきた当該車両37を検知し、車種、車速を識別し、当該車線の車線制御装置17へ通知する。
【0039】
次に、当該車両37が路側無線装置13の通信可能エリアに入ったことが検知されると、路側無線装置13は、当該車両37の車載器38との間で無線通信を行なうことにより、所定の処理(車両の正当性を判定し、判定OKの場合に当該料金所の入場情報を書込む等)を行なう。
【0040】
次に、路側無線装置13は、車載器38に対して入場情報等を正常記録したことを確認し、それを車線制御装置17へ通知する。
このとき、なんらかの原因によりETC処理が正常に行なわれなかった場合、ブース処理機14により、通行券(入場証)を発行するか、もしくは、ETCカード処理を行なうか、もしくは、現金処理で料金収受を行なって領収書を発行する。その処理結果情報は、上位の車線制御装置17へ送信される。
【0041】
次に、車線制御装置17は、車両検知・車種判別装置12からの情報と、路側無線装置13からの情報との一致をとって、当該車両37の通過許可を発進制御装置16へ通知する。発進制御装置16は、車線制御装置17からの通過許可通知を受けると、阻止バーを開けて当該車両37の通過を許可する。
【0042】
次に、発進制御装置16が当該車両37の通過を確認し、その確認情報を車線制御装置17へ通知する。
【0043】
なお、出口料金所、つまり例えばETC出口車線25aにおいても同様の処理を行ない、車線制御装置32において入口と出口との間の利用料金を計算し、その利用料金を当該車両37の入出情報等とともに料金所Aデータ処理装置33を介して中央処理装置36へ送信することにより、中央制御装置36で集計して、クレジット会社へ通知される。
【0044】
また、ETC出口車線25aにおいては、カメラシステム31aの画像処理装置45は、正常課金された車両37が通過する場合は、前方カメラユニット41で撮像した車両画像は図示しないメモリ(RAM)上に一時記憶するだけで保存を行なわないか、あるいは、24時間連続で録画(撮像した車両画像の記録)を継続する。
【0045】
次に、不正突破発生時を含む撮像系の動作について説明する。
たとえば、ETC出口車線25aにおいて不正突破車両39が発生した場合、カメラシステム31aによりその瞬間を捉えて前後数秒から数十秒間程度の画像を記録するか、もしくは、全ての走行車両37の画像を24時間連続で録画する。「不正突破」の定義は幾つかのバリエーションを持たせることができ、車両ナンバや運転者等を確実に特定できる情報として認識し、記録、保管管理し、不正証拠データとする。
【0046】
次に、カメラシステム21,31a,31bの後方カメラ43に対する露光制御パラメータ設定処理の手順について図4に示すフローチャートを参照して説明する。
【0047】
カメラシステム21,31a,31bの後方カメラ43は、一定時間(たとえば、1時間)ごとに照度センサ44から照度情報を取得し(ステップS1)、画像処理装置45を介して車線制御装置32a,32b内の制御情報格納部51,52,53へ送る(ステップS2)。
【0048】
制御情報格納部51,52,53は、照度センサ44からの照度情報に基づき各後方カメラ43に対する露光制御パラメータ(たとえば、アイリス、ゲイン、シャッタスピードなどのうち少なくとも1つ)を決定し(ステップS3)、露光制御部54,55,56へ送る(ステップS4)。
【0049】
ここで、決定された後方カメラ43に対する露光制御パラメータの具体例を示すと図5、図6のようになり、制御情報格納部51,52,53内にテーブルデータとして格納される。図5は、後方カメラ43が複数台設置されている場合(図1の場合)で、たとえば、この例では1時間ごとに露光制御パラメータが決定される。図6は、後方カメラ43が単一の場合で、たとえば、この例では10分ごとに露光制御パラメータが決定される。
【0050】
次に、露光制御部54,55,56は、後方カメラ43の設置台数をチェックし(ステップS5)、後方カメラ43が複数台設置されている場合(図1の例の場合は3台)、ステップS3で決定された露光制御パラメータ(自カメラの露光制御パラメータ)と他の複数(図1の例の場合は2台)の後方カメラ43の決定された露光制御パラメータ(他カメラの露光制御パラメータ)との相関関係を求める(ステップS6)。
【0051】
次に、露光制御部54,55,56は、求めた相関関係から大きく離れる露光制御パラメータが存在するか否かをチェックし(ステップS7)、大きく離れる露光制御パラメータが存在する場合、自カメラの露光制御パラメータは不適切と判断し(ステップS8)、複数の他カメラの露光制御パラメータの平均値を算出し(ステップS9)、算出した平均値を当該後方カメラ43の露光制御パラメータとし(ステップS10)、当該後方カメラ43へ送信して設定する(ステップS11)。
【0052】
ステップS7におけるチェックの結果、大きく離れる露光制御パラメータが存在しない場合、ステップS8〜S10の処理をジャンプしてステップS11に進み、ステップS3で決定された露光制御パラメータを当該後方カメラ43へ送信して設定する。
【0053】
ここで、ステップS7における相関関係から大きく離れる露光制御パラメータの具体例について説明しておく。相関関係から大きく離れる露光制御パラメータとは、この例では、たとえば、10倍以上離れている(たとえば、露光制御パラメータが「100」の場合は「10」以下、「1000」以上)場合とする。
【0054】
図5の例で説明すれば、たとえば、カメラシステム21の後方カメラ43を対象とした場合、2008年9月19日14時の時点での決定された露光制御パラメータは「1000」で、他のカメラシステム31a,31bの後方カメラ43の決定された露光制御パラメータは「100」であり、両者を比較した場合、カメラシステム21の後方カメラ43の露光制御パラメータは値がかけ離れている。
【0055】
したがって、この場合は、他のカメラシステム31a,31bの後方カメラ43の露光制御パラメータの平均値(上記例では、100+100/2=100)を算出し、この算出した平均値「100」をカメラシステム21の後方カメラ43の露光制御パラメータとし、当該後方カメラ43へ送信して設定する。
【0056】
ステップS5におけるチェックの結果、後方カメラ43が単一の場合、露光制御部54(55,56)は、ステップS3で決定された露光制御パラメータと当該後方カメラ43の過去の時間的に近傍の露光制御パラメータとの相関関係を求める(ステップS12)。
【0057】
次に、露光制御部54(55,56)は、求めた相関関係の相関値が一定値以下か否かをチェックし(ステップS13)、一定値以下である場合、決定された露光制御パラメータは不適切と判断し(ステップS14)、過去の時間的に近傍の露光制御パラメータを当該後方カメラ43の露光制御パラメータとし(ステップS15)、当該後方カメラ43へ送信して設定する(ステップS16)。
【0058】
ステップS13におけるチェックの結果、相関値が一定値以下でない場合、ステップS14〜S15の処理をジャンプしてステップS16に進み、ステップS3で決定された露光制御パラメータを当該後方カメラ43へ送信して設定する。
【0059】
ここで、ステップS13における相関関係の相関値の具体例について説明しておく。この例では、たとえば、現在の露光制御パラメータと10倍以上離れている(たとえば、露光制御パラメータが「100」の場合は「10」以下、「1000」以上)場合、相関値が一定値以下とする。
【0060】
図6の例で説明すれば、たとえば、カメラシステム21のみが設置されているとした場合、2008年9月27日15時の時点での決定された露光制御パラメータ(現時点の露光制御パラメータ)は「1000」で、これと直近の時点である2008年9月27日14時50分の時点での露光制御パラメータは「100」であり、両者を比較した場合、現時点の後方カメラ43の露光制御パラメータは10倍以上離れているので、相関値が一定値以下と判定される。
【0061】
したがって、この場合は、直近の露光制御パラメータ「100」を当該後方カメラ43の露光制御パラメータとし、当該後方カメラ43へ送信して設定する。
【0062】
なお、上記説明では、後方カメラ43に対する露光制御パラメータの設定処理について述べたが、前方カメラ41に対する露光制御パラメータの設定処理も同様に行なわれるので、その説明は省略する。
【0063】
このように、たとえば、照度センサ等の照度情報取得系に異常が発生したことが原因で、決定された露光制御パラメータの値に異常が生じても、後方カメラが複数台設置されている場合は隣接車線の決定された露光制御パラメータ、あるいは、後方カメラが単一の場合は当該後方カメラの過去の直近時刻の露光制御パラメータと比較することで、異常を検知することができる。そのため、異常に気づかず、無意味(不鮮明)な画像を撮像し続けることを防ぐことができる。また、同情報を呼び出し、適用することで、運用を止めずに正常制御を継続することができる。
【0064】
次に、第2の実施の形態について説明する。
第2の実施の形態は、設置されたカメラが単一で、他のカメラの露光制御パラメータを取得できない場合に適用されるもので、以下の例では、たとえば、ETC出口車線25aに設置されたカメラシステム31aに適用した場合について説明する。
【0065】
図7は、第2の実施の形態に係る車線制御装置32aの露光制御パラメータ設定部分の構成を概略的に示している。すなわち、車線制御装置32aは、カメラシステム31aの後方カメラ43に設けられた照度センサ44から送られる照度情報に基づき後方カメラ43の露光制御パラメータ(たとえば、アイリス、ゲイン、シャッタスピード等)を決定する制御情報格納部61、制御情報格納部61で決定された露光制御パラメータに基づき後方カメラ43の露光制御パラメータを設定する露光制御部62、および、現在の天候情報を供給する天候情報供給部63を有している。
【0066】
なお、図3は、後方カメラ43に対する露光制御パラメータ設定部分にかかる部分だけを例として示しているが、前方カメラ41に対しても同様な構成となっている。
【0067】
次に、カメラシステム31aの後方カメラ43に対する露光制御パラメータ設定処理の手順について図8に示すフローチャートを参照して説明する。
【0068】
カメラシステム31aの後方カメラ43は、一定時間(たとえば、10分)ごとに照度センサ44から照度情報を取得し(ステップS21)、画像処理装置45を介して車線制御装置32a内の制御情報格納部61へ送る(ステップS22)。
【0069】
制御情報格納部61は、照度センサ44からの照度情報に基づき各後方カメラ43に対する露光制御パラメータ(たとえば、アイリス、ゲイン、シャッタスピードなどのうち少なくとも1つ)を決定し(ステップS23)、露光制御部62へ送る(ステップS24)。
【0070】
ここで、決定された後方カメラ43に対する露光制御パラメータの具体例を示すと図9のようになり、たとえば、この例では10分ごとに露光制御パラメータが決定され、その時点の天候情報も付加されていて、制御情報格納部61内にテーブルデータとして格納される。なお、天候情報は、天候情報供給部63から供給される天候情報を参照することで取得される。
【0071】
露光制御部62は、ステップS23で決定された露光制御パラメータ(現時点の露光制御パラメータ)と当該後方カメラ43の過去の時間的に近傍の露光制御パラメータとの相関関係を求める(ステップS25)。
【0072】
次に、露光制御部62は、求めた相関関係の相関値が一定値以下か否かをチェックし(ステップS26)、一定値以下である場合、現時点の露光制御パラメータと当該後方カメラ43の過去の同時期同天候時の露光制御パラメータとの相関関係を求める(ステップS27)。
【0073】
ここで、ステップS26における相関関係の相関値の具体例について説明しておく。この例では、たとえば、現在の露光制御パラメータと10倍以上離れている(たとえば、露光制御パラメータが「100」の場合は「10」以下、「1000」以上)場合、相関値が一定値以下とする。
【0074】
図9の例で説明すれば、たとえば、2008年9月19日14時30分の時点での決定された露光制御パラメータ(現時点の露光制御パラメータ)は「1000」で、これと直近の時点である2008年9月19日14時20分の時点での露光制御パラメータは「100」であり、両者を比較した場合、10倍以上離れているので、相関値が一定値以下と判定される。
【0075】
ここで、過去の同時期同天候時の露光制御パラメータの具体例を示すと図10のようになり、天候情報も付加されていて、制御情報格納部61内にテーブルデータとして格納されているものとする。
【0076】
次に、露光制御部62は、求めた相関関係の相関値が一定値以下か否かをチェックし(ステップS28)、一定値以下である場合、当該後方カメラ43の過去の時間的に近傍の露光制御パラメータと当該後方カメラ43の過去の同時期同天候時の露光制御パラメータとの相関関係を求める(ステップS29)。
【0077】
ここで、ステップS28における相関関係の相関値の具体例について説明しておく。この例では、たとえば、現在の露光制御パラメータと10倍以上離れている(たとえば、露光制御パラメータが「100」の場合は「10」以下、「1000」以上)場合、相関値が一定値以下とする。
【0078】
図9、図10の例で説明すれば、たとえば、2008年9月19日14時30分の時点での決定された天候および露光制御パラメータ(現時点の露光制御パラメータ)は「曇り、1000」で、これと同時期同天候時である9月中旬14時30分(曇り)の露光制御パラメータは「1000」であり、両者を比較した場合、一致するので、相関値は一定値以下でないと判定される。
【0079】
次に、露光制御部62は、求めた相関関係の相関値が一定値以下か否かをチェックし(ステップS30)、一定値以下である場合、当該後方カメラ43の過去の同時期同天候時の露光制御パラメータを当該後方カメラ43の現在の露光制御パラメータとする(ステップS31)。
【0080】
ここで、ステップS30における相関関係の相関値の具体例について説明しておく。この例では、たとえば、時間的に近傍の露光制御パラメータと10倍以上離れている(たとえば、露光制御パラメータが「100」の場合は「10」以下、「1000」以上)場合、相関値が一定値以下とする。
【0081】
図9、図10の例で説明すれば、たとえば、2008年9月19日14時30分の時点での決定された天候および露光制御パラメータ(現時点の露光制御パラメータ)は「曇り、1000」で、これと直近の時点である2008年9月19日14時20分の時点での露光制御パラメータは「晴れ、150」で、これと同時期同天候時である9月中旬14時30分(晴れ)の露光制御パラメータは「100」であり、両者を比較した場合、10倍以上離れていないので、相関値は一定値以下でないと判定される。
【0082】
次に、露光制御部62は、過去の同時期同天候時の露光制御パラメータでの運用経過時間が一定値以上か否かをチェックし(ステップS32)、一定値以上であれば、図示しないディスプレイや音声案内装置等を用いて、照度センサ44の異常(たとえば、故障)などとして異常警報を出力し(ステップS33)、その後、ステップS31で決定した露光制御パラメータ(過去の同時期同天候時の露光制御パラメータ)を当該後方カメラ43へ送信して設定する(ステップS34)。
【0083】
ステップS32におけるチェックの結果、過去の同時期同天候時の露光制御パラメータでの運用経過時間が一定値以上でない場合、露光制御部62は、ステップS33の処理をジャンプしてステップS34に進み、ステップS31で決定した露光制御パラメータ(過去の同時期同天候時の露光制御パラメータ)を当該後方カメラ43へ送信して設定する。
【0084】
ステップS30におけるチェックの結果、相関値が一定値以下でない場合、露光制御部62は、当該後方カメラ43の過去の時間的に近傍の露光制御パラメータを当該後方カメラ43の現在の露光制御パラメータとし(ステップS35)、当該後方カメラ43へ送信して設定する(ステップS34)。
【0085】
ステップS26あるいはS28におけるチェックの結果、相関値が一定値以下でない場合、ステップS34に進み、ステップS23で決定された露光制御パラメータを当該後方カメラ43へ送信して設定する。
【0086】
なお、上記説明では、後方カメラ43に対する露光制御パラメータの設定処理について述べたが、前方カメラ41に対する露光制御パラメータの設定処理も同様に行なわれるので、その説明は省略する。
【0087】
このように、たとえば、照度センサ等の照度情報取得系に異常が発生したことが原因で、決定された露光制御パラメータの値に異常が生じても、当該後方カメラの過去の直近時刻あるいは過去の同時期同天候時の露光制御パラメータと比較することで、異常を検知することができる。そのため、異常に気づかず、無意味(不鮮明)な画像を撮像し続けることを防ぐことができる。また、同情報を呼び出し、適用することで、運用を止めずに正常制御を継続することができる。
【0088】
具体的に説明すると、たとえば、図9に示すような露光制御パラメータを取得したとする。ここで、10分ごとに露光制御パラメータを送信しているとする。2008年9月19日14時30分の時点での露光制御パラメータは、これと直近の2008年9月19日14時20分の露光制御パラメータと比較した場合、値がかけ離れている。しかし、直近の露光制御パラメータと現在の露光制御パラメータとの比較しか行なわない場合、天候や日の出、日の入りによる露光制御パラメータの急激な変化と照度センサの故障との区別がつかない。
【0089】
そこで、図10に示すような過去の同時期同天候時の露光制御パラメータと現在の露光制御パラメータとを比較することにより、天候、日の出、日の入りによる露光制御パラメータの急激な変化を異常と認識することを防ぐことができる。
【0090】
また、照度センサの故障時でも、過去の同時期同天候時の露光制御パラメータを使用することにより、直近の露光制御パラメータを用いての運用では対応できない昼間→夜間等の急激な露光制御パラメータの変化にも対応することができる。
【0091】
さらに、一定時間以上、直近の露光制御パラメータ、現在の露光制御パラメータ、過去の同時期同天候時の露光制御パラメータの相関値が一定値以下の場合(一定時間以上、過去の露光制御パラメータを使い続けていた場合)、照度センサ系統の異常として警告を出力する。これは、急激な露光制御パラメータの変化が起こらない状況(たとえば、夜間等)において、露光制御パラメータの相関値が一定値以下になり続ける場合、照度センサの異常の可能性が高いからである。
【符号の説明】
【0092】
11…ETC入口車線、12…車両検知・車種判別装置、13…路側無線装置、16…発進制御装置、17…車線制御装置、18…一般入口車線18、19…車両検知・車種判別装置、21…カメラシステム、23…発進制御装置、24…車線制御装置、25a,25b…ETC出口車線、26a,26b…車両検知・車種判別装置、27a,27b…路側無線装置、30a,30b…発進制御装置、31a,31b…カメラシステム、32a,32b…車線制御装置、37…車両、38…車載器、41…前方カメラ、42…照度センサ(照度情報取得手段)、43…後方カメラ、44…照度センサ(照度情報取得手段)、45…画像処理装置(画像処理手段)、51,52,53,61…制御情報格納部、54,55,56,62…露光制御部、63…天候情報供給部。
【特許請求の範囲】
【請求項1】
車両が走行する道路の側部に設置され、当該道路を走行する車両の画像を撮像するもので、外部から露光制御パラメータを設定可能なカメラと、
このカメラの近傍の照度情報を取得する照度情報取得手段と、
この照度情報取得手段により取得された照度情報に基づき前記カメラの露光制御パラメータを決定する露光制御パラメータ決定手段と、
前記カメラが複数台設置されている場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと他の各カメラの決定された露光制御パラメータとの相関関係を求める第1の相関関係算出手段と、
この第1の相関関係算出手段により求めた相関関係において、相関関係から所定値以上離れる露光制御パラメータが存在する場合、前記他の各カメラの決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定し、相関関係から所定値以上離れる露光制御パラメータが存在しない場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第1の露光制御パラメータ設定手段と、
前記カメラが単一の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の時間的に近傍の露光制御パラメータとの相関関係を求める第2の相関関係算出手段と、
この第2の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、前記過去の時間的に近傍の露光制御パラメータに基づき前記カメラの露光制御パラメータを設定し、相関値が所定値以上の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第2の露光制御パラメータ設定手段と、
前記カメラから得られる画像を用いて所定の画像処理を行なう画像処理手段と、
を具備したことを特徴とするカメラシステム。
【請求項2】
車両が走行する道路の側部に設置され、当該道路を走行する車両の画像を撮像するもので、外部から露光制御パラメータを設定可能なカメラと、
このカメラの近傍の照度情報を取得する照度情報取得手段と、
この照度情報取得手段により取得された照度情報に基づき前記カメラの露光制御パラメータを決定する露光制御パラメータ決定手段と、
この露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の時間的に近傍の露光制御パラメータとの相関関係を求める第1の相関関係算出手段と、
この第1の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の同時期同天候時の露光制御パラメータとの相関関係を求める第2の相関関係算出手段と、
この第2の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、当該カメラの過去の同時期同天候時の露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第1の露光制御パラメータ設定手段と、
前記第1の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、あるいは、前記第2の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第2の露光制御パラメータ設定手段と、
前記カメラから得られる画像を用いて所定の画像処理を行なう画像処理手段と、
を具備したことを特徴とするカメラシステム。
【請求項3】
車両が走行する道路の側部に設置され、当該道路を走行する車両の画像を撮像するもので、外部から露光制御パラメータを設定可能なカメラと、
このカメラの近傍の照度情報を取得する照度情報取得手段と、
この照度情報取得手段により取得された照度情報に基づき前記カメラの露光制御パラメータを決定する露光制御パラメータ決定手段と、
この露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の時間的に近傍の露光制御パラメータとの相関関係を求める第1の相関関係算出手段と、
この第1の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の同時期同天候時の露光制御パラメータとの相関関係を求める第2の相関関係算出手段と、
この第2の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、当該カメラの過去の時間的に近傍の露光制御パラメータと当該カメラの過去の同時期同天候時の露光制御パラメータとの相関関係を求める第3の相関関係算出手段と、
この第3の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、当該カメラの過去の同時期同天候時の露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第1の露光制御パラメータ設定手段と、
前記第1の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、あるいは、前記第2の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第2の露光制御パラメータ設定手段と、
前記第3の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、当該カメラの過去の時間的に近傍の露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第3の露光制御パラメータ設定手段と、
前記カメラから得られる画像を用いて所定の画像処理を行なう画像処理手段と、
を具備したことを特徴とするカメラシステム。
【請求項4】
車両が走行する道路の側部に設置され、当該道路を走行する車両の少なくともナンバプレートあるいは運転者の顔を含む画像を撮像するもので、外部から露光制御パラメータを設定可能なカメラと、
このカメラの近傍の照度情報を取得する照度情報取得手段と、
この照度情報取得手段により取得された照度情報に基づき前記カメラの露光制御パラメータを決定する露光制御パラメータ決定手段と、
前記カメラが複数台設置されている場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと他の各カメラの決定された露光制御パラメータとの相関関係を求める第1の相関関係算出手段と、
この第1の相関関係算出手段により求めた相関関係において、相関関係から所定値以上離れる露光制御パラメータが存在する場合、前記他の各カメラの決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定し、相関関係から所定値以上離れる露光制御パラメータが存在しない場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第1の露光制御パラメータ設定手段と、
前記カメラが単一の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の時間的に近傍の露光制御パラメータとの相関関係を求める第2の相関関係算出手段と、
この第2の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、前記過去の時間的に近傍の露光制御パラメータに基づき前記カメラの露光制御パラメータを設定し、相関値が所定値以上の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第2の露光制御パラメータ設定手段と、
前記カメラから得られる画像を記録する画像記録手段と、
を具備したことを特徴とするカメラシステム。
【請求項5】
車両が走行する道路の側部に設置され、当該道路を走行する車両の少なくともナンバプレートあるいは運転者の顔を含む画像を撮像するもので、外部から露光制御パラメータを設定可能なカメラと、
このカメラの近傍の照度情報を取得する照度情報取得手段と、
この照度情報取得手段により取得された照度情報に基づき前記カメラの露光制御パラメータを決定する露光制御パラメータ決定手段と、
この露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の時間的に近傍の露光制御パラメータとの相関関係を求める第1の相関関係算出手段と、
この第1の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の同時期同天候時の露光制御パラメータとの相関関係を求める第2の相関関係算出手段と、
この第2の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、当該カメラの過去の同時期同天候時の露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第1の露光制御パラメータ設定手段と、
前記第1の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、あるいは、前記第2の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第2の露光制御パラメータ設定手段と、
前記カメラから得られる画像を記録する画像記録手段と、
を具備したことを特徴とするカメラシステム。
【請求項6】
車両が走行する道路の側部に設置され、当該道路を走行する車両の少なくともナンバプレートあるいは運転者の顔を含む画像を撮像するもので、外部から露光制御パラメータを設定可能なカメラと、
このカメラの近傍の照度情報を取得する照度情報取得手段と、
この照度情報取得手段により取得された照度情報に基づき前記カメラの露光制御パラメータを決定する露光制御パラメータ決定手段と、
この露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の時間的に近傍の露光制御パラメータとの相関関係を求める第1の相関関係算出手段と、
この第1の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の同時期同天候時の露光制御パラメータとの相関関係を求める第2の相関関係算出手段と、
この第2の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、当該カメラの過去の時間的に近傍の露光制御パラメータと当該カメラの過去の同時期同天候時の露光制御パラメータとの相関関係を求める第3の相関関係算出手段と、
この第3の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、当該カメラの過去の同時期同天候時の露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第1の露光制御パラメータ設定手段と、
前記第1の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、あるいは、前記第2の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第2の露光制御パラメータ設定手段と、
前記第3の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、当該カメラの過去の時間的に近傍の露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第3の露光制御パラメータ設定手段と、
前記カメラから得られる画像を記録する画像記録手段と、
を具備したことを特徴とするカメラシステム。
【請求項7】
前記第1の露光制御パラメータ設定手段により設定された当該カメラの過去の同時期同天候時の露光制御パラメータでの運用経過時間が所定値以上になった場合、異常警告を出力する報知手段をさらに具備したことを特徴とする請求項2または請求項3または請求項5または請求項6記載のカメラシステム。
【請求項1】
車両が走行する道路の側部に設置され、当該道路を走行する車両の画像を撮像するもので、外部から露光制御パラメータを設定可能なカメラと、
このカメラの近傍の照度情報を取得する照度情報取得手段と、
この照度情報取得手段により取得された照度情報に基づき前記カメラの露光制御パラメータを決定する露光制御パラメータ決定手段と、
前記カメラが複数台設置されている場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと他の各カメラの決定された露光制御パラメータとの相関関係を求める第1の相関関係算出手段と、
この第1の相関関係算出手段により求めた相関関係において、相関関係から所定値以上離れる露光制御パラメータが存在する場合、前記他の各カメラの決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定し、相関関係から所定値以上離れる露光制御パラメータが存在しない場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第1の露光制御パラメータ設定手段と、
前記カメラが単一の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の時間的に近傍の露光制御パラメータとの相関関係を求める第2の相関関係算出手段と、
この第2の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、前記過去の時間的に近傍の露光制御パラメータに基づき前記カメラの露光制御パラメータを設定し、相関値が所定値以上の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第2の露光制御パラメータ設定手段と、
前記カメラから得られる画像を用いて所定の画像処理を行なう画像処理手段と、
を具備したことを特徴とするカメラシステム。
【請求項2】
車両が走行する道路の側部に設置され、当該道路を走行する車両の画像を撮像するもので、外部から露光制御パラメータを設定可能なカメラと、
このカメラの近傍の照度情報を取得する照度情報取得手段と、
この照度情報取得手段により取得された照度情報に基づき前記カメラの露光制御パラメータを決定する露光制御パラメータ決定手段と、
この露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の時間的に近傍の露光制御パラメータとの相関関係を求める第1の相関関係算出手段と、
この第1の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の同時期同天候時の露光制御パラメータとの相関関係を求める第2の相関関係算出手段と、
この第2の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、当該カメラの過去の同時期同天候時の露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第1の露光制御パラメータ設定手段と、
前記第1の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、あるいは、前記第2の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第2の露光制御パラメータ設定手段と、
前記カメラから得られる画像を用いて所定の画像処理を行なう画像処理手段と、
を具備したことを特徴とするカメラシステム。
【請求項3】
車両が走行する道路の側部に設置され、当該道路を走行する車両の画像を撮像するもので、外部から露光制御パラメータを設定可能なカメラと、
このカメラの近傍の照度情報を取得する照度情報取得手段と、
この照度情報取得手段により取得された照度情報に基づき前記カメラの露光制御パラメータを決定する露光制御パラメータ決定手段と、
この露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の時間的に近傍の露光制御パラメータとの相関関係を求める第1の相関関係算出手段と、
この第1の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の同時期同天候時の露光制御パラメータとの相関関係を求める第2の相関関係算出手段と、
この第2の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、当該カメラの過去の時間的に近傍の露光制御パラメータと当該カメラの過去の同時期同天候時の露光制御パラメータとの相関関係を求める第3の相関関係算出手段と、
この第3の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、当該カメラの過去の同時期同天候時の露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第1の露光制御パラメータ設定手段と、
前記第1の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、あるいは、前記第2の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第2の露光制御パラメータ設定手段と、
前記第3の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、当該カメラの過去の時間的に近傍の露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第3の露光制御パラメータ設定手段と、
前記カメラから得られる画像を用いて所定の画像処理を行なう画像処理手段と、
を具備したことを特徴とするカメラシステム。
【請求項4】
車両が走行する道路の側部に設置され、当該道路を走行する車両の少なくともナンバプレートあるいは運転者の顔を含む画像を撮像するもので、外部から露光制御パラメータを設定可能なカメラと、
このカメラの近傍の照度情報を取得する照度情報取得手段と、
この照度情報取得手段により取得された照度情報に基づき前記カメラの露光制御パラメータを決定する露光制御パラメータ決定手段と、
前記カメラが複数台設置されている場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと他の各カメラの決定された露光制御パラメータとの相関関係を求める第1の相関関係算出手段と、
この第1の相関関係算出手段により求めた相関関係において、相関関係から所定値以上離れる露光制御パラメータが存在する場合、前記他の各カメラの決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定し、相関関係から所定値以上離れる露光制御パラメータが存在しない場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第1の露光制御パラメータ設定手段と、
前記カメラが単一の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の時間的に近傍の露光制御パラメータとの相関関係を求める第2の相関関係算出手段と、
この第2の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、前記過去の時間的に近傍の露光制御パラメータに基づき前記カメラの露光制御パラメータを設定し、相関値が所定値以上の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第2の露光制御パラメータ設定手段と、
前記カメラから得られる画像を記録する画像記録手段と、
を具備したことを特徴とするカメラシステム。
【請求項5】
車両が走行する道路の側部に設置され、当該道路を走行する車両の少なくともナンバプレートあるいは運転者の顔を含む画像を撮像するもので、外部から露光制御パラメータを設定可能なカメラと、
このカメラの近傍の照度情報を取得する照度情報取得手段と、
この照度情報取得手段により取得された照度情報に基づき前記カメラの露光制御パラメータを決定する露光制御パラメータ決定手段と、
この露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の時間的に近傍の露光制御パラメータとの相関関係を求める第1の相関関係算出手段と、
この第1の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の同時期同天候時の露光制御パラメータとの相関関係を求める第2の相関関係算出手段と、
この第2の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、当該カメラの過去の同時期同天候時の露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第1の露光制御パラメータ設定手段と、
前記第1の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、あるいは、前記第2の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第2の露光制御パラメータ設定手段と、
前記カメラから得られる画像を記録する画像記録手段と、
を具備したことを特徴とするカメラシステム。
【請求項6】
車両が走行する道路の側部に設置され、当該道路を走行する車両の少なくともナンバプレートあるいは運転者の顔を含む画像を撮像するもので、外部から露光制御パラメータを設定可能なカメラと、
このカメラの近傍の照度情報を取得する照度情報取得手段と、
この照度情報取得手段により取得された照度情報に基づき前記カメラの露光制御パラメータを決定する露光制御パラメータ決定手段と、
この露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の時間的に近傍の露光制御パラメータとの相関関係を求める第1の相関関係算出手段と、
この第1の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータと当該カメラの過去の同時期同天候時の露光制御パラメータとの相関関係を求める第2の相関関係算出手段と、
この第2の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、当該カメラの過去の時間的に近傍の露光制御パラメータと当該カメラの過去の同時期同天候時の露光制御パラメータとの相関関係を求める第3の相関関係算出手段と、
この第3の相関関係算出手段により求めた相関関係の相関値が所定値以下の場合、当該カメラの過去の同時期同天候時の露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第1の露光制御パラメータ設定手段と、
前記第1の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、あるいは、前記第2の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、前記露光制御パラメータ決定手段により決定された露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第2の露光制御パラメータ設定手段と、
前記第3の相関関係算出手段により求めた相関関係の相関値が所定値以上の場合、当該カメラの過去の時間的に近傍の露光制御パラメータに基づき前記カメラの露光制御パラメータを設定する第3の露光制御パラメータ設定手段と、
前記カメラから得られる画像を記録する画像記録手段と、
を具備したことを特徴とするカメラシステム。
【請求項7】
前記第1の露光制御パラメータ設定手段により設定された当該カメラの過去の同時期同天候時の露光制御パラメータでの運用経過時間が所定値以上になった場合、異常警告を出力する報知手段をさらに具備したことを特徴とする請求項2または請求項3または請求項5または請求項6記載のカメラシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2010−183161(P2010−183161A)
【公開日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願番号】特願2009−22664(P2009−22664)
【出願日】平成21年2月3日(2009.2.3)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願日】平成21年2月3日(2009.2.3)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]