
カメラシステム

【課題】 多数のカメラを設置すること無く、かつ、死角を生じることがない、操作性に優れたカメラシステムを提供する。
【解決手段】 被写体103との距離である被写体距離を検出する被写体距離検出手段を備えたカメラ101と、カメラの撮影方向を変更可能な撮影方向変更手段と、カメラを移動させる移動手段と、移動手段により移動した移動距離を検出する移動距離検出手段と、被写体距離と移動距離により、カメラと被写体との角度を算出し、前記角度を元に撮影方向変更手段によりカメラの撮影方向を変更する制御手段とを有する。
【解決手段】 被写体103との距離である被写体距離を検出する被写体距離検出手段を備えたカメラ101と、カメラの撮影方向を変更可能な撮影方向変更手段と、カメラを移動させる移動手段と、移動手段により移動した移動距離を検出する移動距離検出手段と、被写体距離と移動距離により、カメラと被写体との角度を算出し、前記角度を元に撮影方向変更手段によりカメラの撮影方向を変更する制御手段とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、監視などのために人などの物体の撮影や詳細情報を得るカメラ移動型のカメラシステムに関するものである。
【背景技術】
【0002】
以前より、店舗や駐車場内における窃盗行為や違法行為を監視するため、或いは、外部からの第三者の進入等を監視するために、店舗や駐車場の種々の箇所、或いは、特定の建造物を取り囲むフェンス上の種々の箇所に、監視カメラ装置が配置されている。たとえば、店舗、地下駐車場、屋内駐車場など屋内の監視カメラ装置は、天井に打ち込まれたシャフトに回動可能に取り付けられ、また、屋外駐車場やフェンスなど、屋外の監視カメラ装置は、地盤から鉛直方向にのびるシャフトに回動可能に取り付けられている。これら監視カメラ装置には、モータが取り付けられ、シャフトを回転軸として所定の角度範囲で回動することができ、これにより、上記角度範囲の状況を順次撮影することができるようになっている。また、ズーム機能を搭載して、遠方のものにも対応できるようにし、監視範囲を網羅する方法が取られていた。
【0003】
しかしながら、従来の監視カメラ装置は、カメラの向きを変更することはできても、カメラ自体を移動させることはできなかったため、多くの死角が生じるという問題点があった。たとえば、店舗内の天井から店内を俯瞰するように配置された監視カメラ装置であっても、店舗内の棚により多くの死角が生じるため、棚のかげで行われる行為を撮影することはできない。同様に、駐車場の天井或いは駐車場のコーナー上部から、駐車場内を俯瞰するように配置された監視カメラ装置であっても、駐車中の車の存在により多くの死角が生じる。さらに、屋内駐車場では、数多くの柱が設けられており、この柱の存在により、より多くの死角が生じるという問題点があった。したがって、従来の監視カメラ装置を利用した監視システムにおいては、店舗内或いは駐車場内の種々の場所に、多数(たとえば、10数個)の監視カメラ装置を配置し、上記多数のカメラ装置全体として、死角が生じることを防止している。
【0004】
この問題の解決のため、多数のカメラを設置することなく、かつ、死角を生じさせることなく、所定の領域を監視するため、監視すべき領域に配置されたレール軌道を走行する監視カメラ装置が提案されている。
【0005】
例えば、特許文献1では、少ないカメラ台数で広範囲に渡る監視を行い、かつ詳細な映像を得るため、レール上を移動する撮影装置と、該撮影装置の動作制御を行うと共に、カメラにより撮影した映像を監視する監視装置と、両装置を接続する信号ケーブルを有するシステムが提案されている。
【0006】
また、特許文献2では、所定の領域を監視するため、監視すべき領域に配置されたレール軌道を走行する監視カメラ装置は、ケーシングと、ケーシングに取り付けられたカメラユニットと、ケーシングが着脱自在に取り付けられるフレームとを備えている。さらに、フレームに取り付けられた、レールの上面に接触する駆動輪を回転させる搬送機構と、フレームに取り付けられた、レールの両側部を保持するガイド車輪と、ケーシングにおいて、カメラユニットの視野の側に配置されたディスプレイユニットとを備えている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2002−27441号公報
【特許文献2】特開2001−142138号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上述の特許文献に開示された従来技術では、レール軌道を備えたカメラシステムにより、設置台数の削減、死角の排除が可能となるが、レール軌道の移動による操作軸が増えるため、操作が煩雑になるといった問題がある。
【0009】
図8に示すカメラシステムの設置イメージ図を用いて説明を行う。例えば、レール軌道802上のAの位置にあるカメラ801が、被写体803,804を異なる角度から監視するためには、レール軌道802をBの位置に移動した後、パン・チルトによりCの向きに変更しなければならないといった操作の煩雑さがある。
【0010】
(発明の目的)
本発明の目的は、多数のカメラを設置すること無く、かつ、死角を生じることがない、操作性に優れたカメラシステムを提供することである。
【課題を解決するための手段】
【0011】
上記目的を達成するために、本発明のカメラシステムは、被写体との距離である被写体距離を検出する被写体距離検出手段を備えたカメラと、前記カメラの撮影方向を変更可能な撮影方向変更手段と、前記カメラを移動させる移動手段と、前記移動手段により移動した移動距離を検出する移動距離検出手段と、前記被写体距離と前記移動距離により、前記カメラと前記被写体との角度を算出し、前記角度を元に前記撮影方向変更手段により前記カメラの撮影方向を変更する制御手段とを有することを特徴とするものである。
【発明の効果】
【0012】
本発明によれば、多数のカメラを設置すること無く、かつ、死角を生じることがない、操作性に優れたカメラシステムを提供することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施例1を説明するカメラシステムのイメージ図である。
【図2】実施例1の動作を説明するフローチャートである。
【図3】実施例2を説明するカメラシステムのイメージ図である。
【図4】実施例2の動作を説明するフローチャートである。
【図5】リアフォーカス式ズームレンズにおけるズームレンズ位置とフォーカスレンズ合焦位置の関係を示す特性図である。
【図6】実施例3を説明するカメラシステムのイメージ図である。
【図7】実施例3の動作を説明するフローチャートである。
【図8】従来技術におけるレール軌道を有するカメラシステムのイメージ図である。
【発明を実施するための形態】
【0014】
本発明を実施するための形態は、以下の実施例1ないし3に記載される通りである。
【実施例1】
【0015】
以下、図1を参照して、本発明の実施例1によるカメラシステムの監視形態について説明する。
【0016】
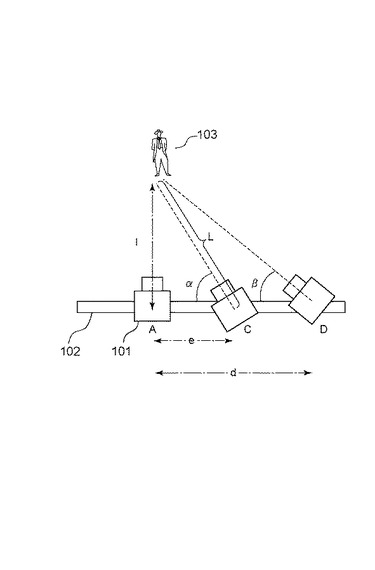
図1において、101は、撮影画像がパン、チルト方向に回動可能になるように構成され、かつ、ズーム機能を有するカメラである。次に、102はカメラ101が移動を行うレール軌道、103は被写体である。カメラ101は、不図示の架台に支持され、架台は、カメラ101の撮影方向を変更可能な撮影方向変更手段と、カメラ101をレール軌跡102の上で移動させるモータなどの移動手段とを有する。また、不図示の制御端末は、撮影方向変更手段や移動手段を制御するCPUなどの制御手段を有する。
【0017】
カメラ101が、レール軌道102上のCの位置からDの位置に移動する際に、被写体103との被写体距離Lに応じて撮影方向の変更を行うことで、被写体103を見失うことなく、異なる角度から被写体の監視が可能となる。
【0018】
なお、本実施例1のカメラは、不図示の制御端末をユーザが操作して、移動指示するようにしている。
【0019】
次に、被写体103を中心とした監視の移動モードについて、レール軌道102の移動距離(d−e)に応じた撮影方向変更手段について説明を行う。
【0020】
最初、カメラ101はCの位置にある。
ここで、リアフォーカスのズームシステムでは、図5に示すように、ピントが合った状態であれば、ズームレンズ位置に対するフォーカスレンズの位置により、被写体までの距離Lが算出できる。例えば、ピントが合った状態であり、ズームレンズ、フォーカスレンズが図5のP点にあれば、このとき、10mの軌跡上にあるため、被写体までの距離は10mと分かる。この被写体距離を検出する被写体距離検出手段は、カメラ101に内蔵されるカメラCPU(不図示)によって構成される。
【0021】
また、カメラ101自身のパンニング回転角により、初期角度αが求められる。
これにより、被写体とのパンニング回転角0°での距離lが、
l=Lsinα
で求められる。
【0022】
次に、カメラ101がDの位置に移動した場合、被写体とのパンニング回転角0°の位置からの相対的レール移動距離dが分れば、
tanβ=l/d
で、必要な被写体を中心に捉えたまま移動するためのパンニング角度βが逐次求められる。なお、移動距離(d−e)を検出する移動距離検出手段は、制御端末に内蔵されるCPUによって構成される。
【0023】
また、オートフォーカス情報から被写体距離が変化した(被写体が動いている)場合は、被写体距離情報Lを更新することで、動体に対しても適応させている。
【0024】
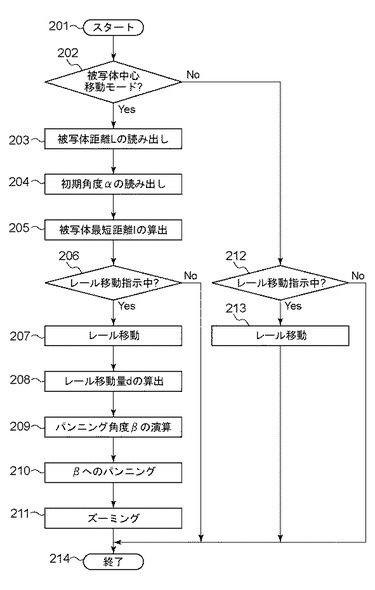
図2は本実施例1の動作フローチャートであり、以下に、この動作フローチャートに従って動作の説明を行う。
(ステップ201)開始
(ステップ202)カメラ101が被写体103を中心とした移動モードである場合にはステップ203へ移行し、通常モードである場合にはステップ212へ移行する。なお、通常モードと被写体中心移動モードは、カメラ101を制御する不図示の制御端末により設定される。
(ステップ203)ズームレンズ位置(ズーム倍率)及びフォーカスレンズ合焦位置から被写体距離Lを算出する。ステップ204へ移行する。
(ステップ204)被写体103とカメラ101との初期角度αを読み出す。ステップ205へ移行する。
(ステップ205)被写体103とのパンニング回転角0°での被写体最短距離lを算出する。ステップ206へ移行する。
(ステップ206)レール軌道102を移動することの指示中である場合にはステップ207へ移行し、レール移動指示中で無い場合にはステップ214へ移行する。なお、本実施例1のカメラ101は、不図示の制御端末をユーザが操作して、移動指示するようにしている。
(ステップ207)レール軌道102上を移動させる。ステップ208へ移行する。
(ステップ208)被写体103とのパンニング回転角0°の位置からのレール移動量dを算出する。ステップ209へ移行する。
(ステップ209)レール移動量dからパンニング角度βを算出する。ステップ210へ移行する。
(ステップ210)パンニング角度をβに変更。ステップ211へ移行する。
(ステップ211)前回の被写体距離Lの増減に応じた、変倍動作を行う。この処理により、被写体像の大きさを一定に保つことが可能となる。この動作は、カメラ101のズームレンズやカメラCPUが行う。つまり、撮影画角を変更可能な撮影画角変更手段は、ズームレンズやカメラCPUによって構成される。ステップ214へ移行する。
(ステップ212)レール移動指示中である場合にはステップ213へ移行し、指示中でない場合には終了する。
(ステップ213)レール軌道102上を移動させる。ステップ214へ移行する。
(ステップ214)終了。
【0025】
説明してきたように、レール軌道102を移動する際に、被写体中心移動モードと通常モードを用意し、適宜切り替えて使用することで、死角を生じることがない、操作性に優れた監視カメラシステムを構築することが可能となる。
【0026】
また、被写体を検出して自動的にカメラの死角が出来ないよう最適な位置にカメラを移動するようにしてもよい。自動的に監視を行う際には、動体が存在しない場合には通常モードで監視を行い、動体を検知した場合には被写体中心移動モードに移行するといった動作も考えられる。
【0027】
レール軌道のシステム構成についても、比較的短いレール軌道であれば、ベルト式とし、モータとエンコーダとで簡易に構成が可能である。
【実施例2】
【0028】
以下、図3を参照して、本発明の実施例2によるカメラシステムの監視形態について説明する。
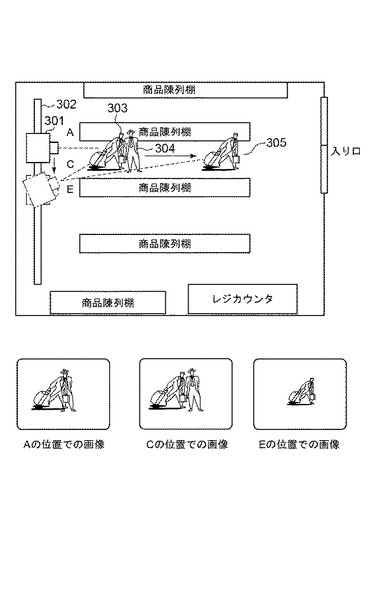
図3において、301は、撮影画像がパン、チルト方向に回動可能になるように構成され、かつ、ズーム機能を有するカメラである。次に、302はカメラ301が移動を行うレール軌道、303、304は被写体である。
【0029】
被写体303が305の位置に移動した場合、被写体303の移動に応じて、被写体303の動きベクトルを検出し、画面上の移動量とズーム倍率、被写体距離から、被写体の水平移動量、垂直移動量の算出を行う。次に、垂直方向の移動量をキャンセルするようにチルト軸を駆動し、補正を行う。また、水平方向の移動については、レール軌道302上の移動時に加減算を行うことで補正を行う。例えば、被写体303が305の位置に移動した場合でも、カメラをE位置に移動及び回動させることで、被写体を中心となるようにできる。これにより、移動している被写体303に対しても、被写体303が中心となるように対応ができ、移動被写体を捉え続けることが可能となる。
【0030】
図4は本実施例2の動作フローチャートであり、以下に、この動作フローチャートに従って動作の説明を行う。
(ステップ401)開始
(ステップ402)被写体を中心とした移動モードである場合にはステップ403へ移行し、通常モードである場合にはステップ414へ移行する。
(ステップ403)ズームレンズ位置(ズーム倍率)及びフォーカスレンズ合焦位置から被写体距離Lを算出する。ステップ404へ移行する。
(ステップ404)被写体303、304とカメラ301との初期角度αを読み出す。ステップ405へ移行する。
(ステップ405)被写体303、304とのパンニング回転角0°の位置での被写体最短距離lを算出する。ステップ406へ移行する。
(ステップ406)レール軌道302を移動することの指示中である場合にはステップ407へ移行し、レール移動指示中で無い場合にはステップ416へ移行する。
(ステップ407)被写体303の動きベクトルを検出し、ズーム倍率、被写体距離から、被写体303の水平移動量を算出し、レール移動時にパンニング角度βの加減算による補正量の算出を行う。また、垂直方向の移動量を算出し、チルティングによる補正量の算出を行う。ステップ408へ移行する。
(ステップ408)被写体303の動き量に応じた垂直方向の補正をチルティングにより行う。ステップ409へ移行する。
(ステップ409)レール軌道302を移動。ステップ410へ移行する。
(ステップ410)被写体303とのパンニング回転角0°の位置からのレール移動量dを算出する。ステップ411へ移行する。
(ステップ411)パンニング角度βを算出する。ステップ412へ移行する。
(ステップ412)パンニング角度をβに変更。ステップ413へ移行する。
(ステップ413)前回の被写体距離Lの増減により、ズーミングを行う。この処理により、被写体像の大きさを一定に保つことが可能となる。
(ステップ414)レール移動指示中である場合にはステップ415へ移行し、指示中でない場合には終了する。
(ステップ415)レール軌道302を移動し、ステップ416へ移行する。
(ステップ416)終了。
【実施例3】
【0031】
以下、図6を参照して、本発明の実施例3によるカメラシステムの監視形態について説明する。
【0032】
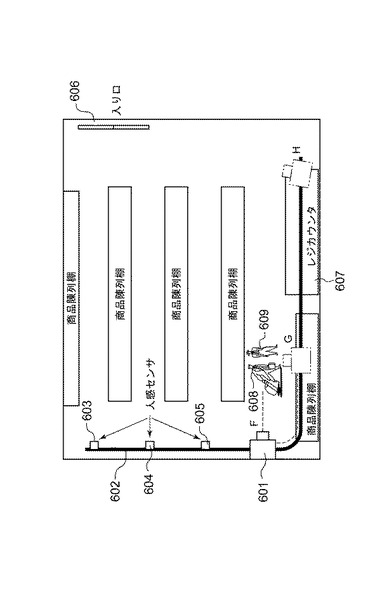
図6において、601は、撮影画像がパン、チルト方向に回動可能になるように構成され、かつ、ズーム機能を有するカメラである。次に、602はカメラ601が移動を行うレール軌道、608、609は被写体である。
【0033】
本実施例3では、レール軌道602上の見通しの良い箇所に人感センサ603,604,605(赤外線センサ、超音波センサ、等)を設置し、死角を補完している。
【0034】
これら人感センサ603,604,605の検出結果に応じてカメラ601を移動させることで、効率的な監視が可能となる。
【0035】
人感センサ603,604,605に反応が無い場合には、カメラ601をHの位置に移動し、エントランス(入り口)606、レジカウンタ607のモニタリングに使用する等、兼用が可能となる。
【0036】
本実施例3では、レール軌道602にカーブが存在するため、カーブに応じたカメラ姿勢を補正する必要がある。
【0037】
ここで、カメラ601がFの位置で被写体608,609をモニタしている場合には、Gの位置に移動すれば正面からのモニタリングが可能となる。
【0038】
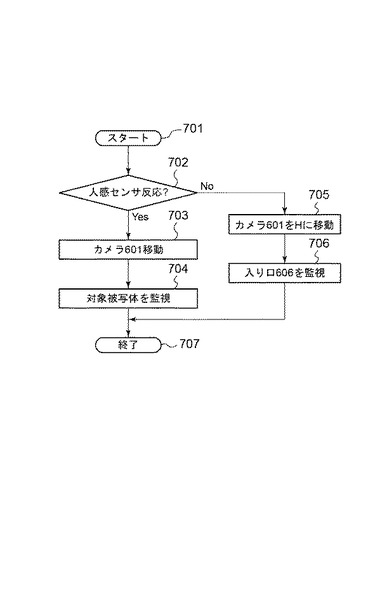
図7は本実施例3の動作フローチャートであり、以下に、この動作フローチャートに従って動作の説明を行う。
(ステップ701)開始
(ステップ702)人感センサ603,604,605が反応した場合にはステップ703に移行し、反応していない場合にはステップ705に移行する。
(ステップ703)カメラ601を反応した人感センサの位置に移動する。ステップ704に移行する。
(ステップ704)対象被写体の監視を行う。ステップ707へ移行する。
(ステップ705)カメラ601をHの位置に移動する。ステップ706へ移行する。
(ステップ706)入り口606の監視を行う。ステップ707へ移行する。
(ステップ707)終了。
【0039】
また、実施例3では人の存在を検知する感知手段として人感センサが用いられているが、人感センサの代わりに、小型の監視カメラを設置することも考えられる。
【0040】
以上、本発明の好ましい実施例1ないし3について説明したが、本発明はこれらの実施例に限定されず、その要旨の範囲内で種々の変形及び変更が可能である。
【符号の説明】
【0041】
101 カメラ
102 レール軌道
103 被写体
L 被写体距離
【技術分野】
【0001】
本発明は、監視などのために人などの物体の撮影や詳細情報を得るカメラ移動型のカメラシステムに関するものである。
【背景技術】
【0002】
以前より、店舗や駐車場内における窃盗行為や違法行為を監視するため、或いは、外部からの第三者の進入等を監視するために、店舗や駐車場の種々の箇所、或いは、特定の建造物を取り囲むフェンス上の種々の箇所に、監視カメラ装置が配置されている。たとえば、店舗、地下駐車場、屋内駐車場など屋内の監視カメラ装置は、天井に打ち込まれたシャフトに回動可能に取り付けられ、また、屋外駐車場やフェンスなど、屋外の監視カメラ装置は、地盤から鉛直方向にのびるシャフトに回動可能に取り付けられている。これら監視カメラ装置には、モータが取り付けられ、シャフトを回転軸として所定の角度範囲で回動することができ、これにより、上記角度範囲の状況を順次撮影することができるようになっている。また、ズーム機能を搭載して、遠方のものにも対応できるようにし、監視範囲を網羅する方法が取られていた。
【0003】
しかしながら、従来の監視カメラ装置は、カメラの向きを変更することはできても、カメラ自体を移動させることはできなかったため、多くの死角が生じるという問題点があった。たとえば、店舗内の天井から店内を俯瞰するように配置された監視カメラ装置であっても、店舗内の棚により多くの死角が生じるため、棚のかげで行われる行為を撮影することはできない。同様に、駐車場の天井或いは駐車場のコーナー上部から、駐車場内を俯瞰するように配置された監視カメラ装置であっても、駐車中の車の存在により多くの死角が生じる。さらに、屋内駐車場では、数多くの柱が設けられており、この柱の存在により、より多くの死角が生じるという問題点があった。したがって、従来の監視カメラ装置を利用した監視システムにおいては、店舗内或いは駐車場内の種々の場所に、多数(たとえば、10数個)の監視カメラ装置を配置し、上記多数のカメラ装置全体として、死角が生じることを防止している。
【0004】
この問題の解決のため、多数のカメラを設置することなく、かつ、死角を生じさせることなく、所定の領域を監視するため、監視すべき領域に配置されたレール軌道を走行する監視カメラ装置が提案されている。
【0005】
例えば、特許文献1では、少ないカメラ台数で広範囲に渡る監視を行い、かつ詳細な映像を得るため、レール上を移動する撮影装置と、該撮影装置の動作制御を行うと共に、カメラにより撮影した映像を監視する監視装置と、両装置を接続する信号ケーブルを有するシステムが提案されている。
【0006】
また、特許文献2では、所定の領域を監視するため、監視すべき領域に配置されたレール軌道を走行する監視カメラ装置は、ケーシングと、ケーシングに取り付けられたカメラユニットと、ケーシングが着脱自在に取り付けられるフレームとを備えている。さらに、フレームに取り付けられた、レールの上面に接触する駆動輪を回転させる搬送機構と、フレームに取り付けられた、レールの両側部を保持するガイド車輪と、ケーシングにおいて、カメラユニットの視野の側に配置されたディスプレイユニットとを備えている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2002−27441号公報
【特許文献2】特開2001−142138号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上述の特許文献に開示された従来技術では、レール軌道を備えたカメラシステムにより、設置台数の削減、死角の排除が可能となるが、レール軌道の移動による操作軸が増えるため、操作が煩雑になるといった問題がある。
【0009】
図8に示すカメラシステムの設置イメージ図を用いて説明を行う。例えば、レール軌道802上のAの位置にあるカメラ801が、被写体803,804を異なる角度から監視するためには、レール軌道802をBの位置に移動した後、パン・チルトによりCの向きに変更しなければならないといった操作の煩雑さがある。
【0010】
(発明の目的)
本発明の目的は、多数のカメラを設置すること無く、かつ、死角を生じることがない、操作性に優れたカメラシステムを提供することである。
【課題を解決するための手段】
【0011】
上記目的を達成するために、本発明のカメラシステムは、被写体との距離である被写体距離を検出する被写体距離検出手段を備えたカメラと、前記カメラの撮影方向を変更可能な撮影方向変更手段と、前記カメラを移動させる移動手段と、前記移動手段により移動した移動距離を検出する移動距離検出手段と、前記被写体距離と前記移動距離により、前記カメラと前記被写体との角度を算出し、前記角度を元に前記撮影方向変更手段により前記カメラの撮影方向を変更する制御手段とを有することを特徴とするものである。
【発明の効果】
【0012】
本発明によれば、多数のカメラを設置すること無く、かつ、死角を生じることがない、操作性に優れたカメラシステムを提供することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施例1を説明するカメラシステムのイメージ図である。
【図2】実施例1の動作を説明するフローチャートである。
【図3】実施例2を説明するカメラシステムのイメージ図である。
【図4】実施例2の動作を説明するフローチャートである。
【図5】リアフォーカス式ズームレンズにおけるズームレンズ位置とフォーカスレンズ合焦位置の関係を示す特性図である。
【図6】実施例3を説明するカメラシステムのイメージ図である。
【図7】実施例3の動作を説明するフローチャートである。
【図8】従来技術におけるレール軌道を有するカメラシステムのイメージ図である。
【発明を実施するための形態】
【0014】
本発明を実施するための形態は、以下の実施例1ないし3に記載される通りである。
【実施例1】
【0015】
以下、図1を参照して、本発明の実施例1によるカメラシステムの監視形態について説明する。
【0016】
図1において、101は、撮影画像がパン、チルト方向に回動可能になるように構成され、かつ、ズーム機能を有するカメラである。次に、102はカメラ101が移動を行うレール軌道、103は被写体である。カメラ101は、不図示の架台に支持され、架台は、カメラ101の撮影方向を変更可能な撮影方向変更手段と、カメラ101をレール軌跡102の上で移動させるモータなどの移動手段とを有する。また、不図示の制御端末は、撮影方向変更手段や移動手段を制御するCPUなどの制御手段を有する。
【0017】
カメラ101が、レール軌道102上のCの位置からDの位置に移動する際に、被写体103との被写体距離Lに応じて撮影方向の変更を行うことで、被写体103を見失うことなく、異なる角度から被写体の監視が可能となる。
【0018】
なお、本実施例1のカメラは、不図示の制御端末をユーザが操作して、移動指示するようにしている。
【0019】
次に、被写体103を中心とした監視の移動モードについて、レール軌道102の移動距離(d−e)に応じた撮影方向変更手段について説明を行う。
【0020】
最初、カメラ101はCの位置にある。
ここで、リアフォーカスのズームシステムでは、図5に示すように、ピントが合った状態であれば、ズームレンズ位置に対するフォーカスレンズの位置により、被写体までの距離Lが算出できる。例えば、ピントが合った状態であり、ズームレンズ、フォーカスレンズが図5のP点にあれば、このとき、10mの軌跡上にあるため、被写体までの距離は10mと分かる。この被写体距離を検出する被写体距離検出手段は、カメラ101に内蔵されるカメラCPU(不図示)によって構成される。
【0021】
また、カメラ101自身のパンニング回転角により、初期角度αが求められる。
これにより、被写体とのパンニング回転角0°での距離lが、
l=Lsinα
で求められる。
【0022】
次に、カメラ101がDの位置に移動した場合、被写体とのパンニング回転角0°の位置からの相対的レール移動距離dが分れば、
tanβ=l/d
で、必要な被写体を中心に捉えたまま移動するためのパンニング角度βが逐次求められる。なお、移動距離(d−e)を検出する移動距離検出手段は、制御端末に内蔵されるCPUによって構成される。
【0023】
また、オートフォーカス情報から被写体距離が変化した(被写体が動いている)場合は、被写体距離情報Lを更新することで、動体に対しても適応させている。
【0024】
図2は本実施例1の動作フローチャートであり、以下に、この動作フローチャートに従って動作の説明を行う。
(ステップ201)開始
(ステップ202)カメラ101が被写体103を中心とした移動モードである場合にはステップ203へ移行し、通常モードである場合にはステップ212へ移行する。なお、通常モードと被写体中心移動モードは、カメラ101を制御する不図示の制御端末により設定される。
(ステップ203)ズームレンズ位置(ズーム倍率)及びフォーカスレンズ合焦位置から被写体距離Lを算出する。ステップ204へ移行する。
(ステップ204)被写体103とカメラ101との初期角度αを読み出す。ステップ205へ移行する。
(ステップ205)被写体103とのパンニング回転角0°での被写体最短距離lを算出する。ステップ206へ移行する。
(ステップ206)レール軌道102を移動することの指示中である場合にはステップ207へ移行し、レール移動指示中で無い場合にはステップ214へ移行する。なお、本実施例1のカメラ101は、不図示の制御端末をユーザが操作して、移動指示するようにしている。
(ステップ207)レール軌道102上を移動させる。ステップ208へ移行する。
(ステップ208)被写体103とのパンニング回転角0°の位置からのレール移動量dを算出する。ステップ209へ移行する。
(ステップ209)レール移動量dからパンニング角度βを算出する。ステップ210へ移行する。
(ステップ210)パンニング角度をβに変更。ステップ211へ移行する。
(ステップ211)前回の被写体距離Lの増減に応じた、変倍動作を行う。この処理により、被写体像の大きさを一定に保つことが可能となる。この動作は、カメラ101のズームレンズやカメラCPUが行う。つまり、撮影画角を変更可能な撮影画角変更手段は、ズームレンズやカメラCPUによって構成される。ステップ214へ移行する。
(ステップ212)レール移動指示中である場合にはステップ213へ移行し、指示中でない場合には終了する。
(ステップ213)レール軌道102上を移動させる。ステップ214へ移行する。
(ステップ214)終了。
【0025】
説明してきたように、レール軌道102を移動する際に、被写体中心移動モードと通常モードを用意し、適宜切り替えて使用することで、死角を生じることがない、操作性に優れた監視カメラシステムを構築することが可能となる。
【0026】
また、被写体を検出して自動的にカメラの死角が出来ないよう最適な位置にカメラを移動するようにしてもよい。自動的に監視を行う際には、動体が存在しない場合には通常モードで監視を行い、動体を検知した場合には被写体中心移動モードに移行するといった動作も考えられる。
【0027】
レール軌道のシステム構成についても、比較的短いレール軌道であれば、ベルト式とし、モータとエンコーダとで簡易に構成が可能である。
【実施例2】
【0028】
以下、図3を参照して、本発明の実施例2によるカメラシステムの監視形態について説明する。
図3において、301は、撮影画像がパン、チルト方向に回動可能になるように構成され、かつ、ズーム機能を有するカメラである。次に、302はカメラ301が移動を行うレール軌道、303、304は被写体である。
【0029】
被写体303が305の位置に移動した場合、被写体303の移動に応じて、被写体303の動きベクトルを検出し、画面上の移動量とズーム倍率、被写体距離から、被写体の水平移動量、垂直移動量の算出を行う。次に、垂直方向の移動量をキャンセルするようにチルト軸を駆動し、補正を行う。また、水平方向の移動については、レール軌道302上の移動時に加減算を行うことで補正を行う。例えば、被写体303が305の位置に移動した場合でも、カメラをE位置に移動及び回動させることで、被写体を中心となるようにできる。これにより、移動している被写体303に対しても、被写体303が中心となるように対応ができ、移動被写体を捉え続けることが可能となる。
【0030】
図4は本実施例2の動作フローチャートであり、以下に、この動作フローチャートに従って動作の説明を行う。
(ステップ401)開始
(ステップ402)被写体を中心とした移動モードである場合にはステップ403へ移行し、通常モードである場合にはステップ414へ移行する。
(ステップ403)ズームレンズ位置(ズーム倍率)及びフォーカスレンズ合焦位置から被写体距離Lを算出する。ステップ404へ移行する。
(ステップ404)被写体303、304とカメラ301との初期角度αを読み出す。ステップ405へ移行する。
(ステップ405)被写体303、304とのパンニング回転角0°の位置での被写体最短距離lを算出する。ステップ406へ移行する。
(ステップ406)レール軌道302を移動することの指示中である場合にはステップ407へ移行し、レール移動指示中で無い場合にはステップ416へ移行する。
(ステップ407)被写体303の動きベクトルを検出し、ズーム倍率、被写体距離から、被写体303の水平移動量を算出し、レール移動時にパンニング角度βの加減算による補正量の算出を行う。また、垂直方向の移動量を算出し、チルティングによる補正量の算出を行う。ステップ408へ移行する。
(ステップ408)被写体303の動き量に応じた垂直方向の補正をチルティングにより行う。ステップ409へ移行する。
(ステップ409)レール軌道302を移動。ステップ410へ移行する。
(ステップ410)被写体303とのパンニング回転角0°の位置からのレール移動量dを算出する。ステップ411へ移行する。
(ステップ411)パンニング角度βを算出する。ステップ412へ移行する。
(ステップ412)パンニング角度をβに変更。ステップ413へ移行する。
(ステップ413)前回の被写体距離Lの増減により、ズーミングを行う。この処理により、被写体像の大きさを一定に保つことが可能となる。
(ステップ414)レール移動指示中である場合にはステップ415へ移行し、指示中でない場合には終了する。
(ステップ415)レール軌道302を移動し、ステップ416へ移行する。
(ステップ416)終了。
【実施例3】
【0031】
以下、図6を参照して、本発明の実施例3によるカメラシステムの監視形態について説明する。
【0032】
図6において、601は、撮影画像がパン、チルト方向に回動可能になるように構成され、かつ、ズーム機能を有するカメラである。次に、602はカメラ601が移動を行うレール軌道、608、609は被写体である。
【0033】
本実施例3では、レール軌道602上の見通しの良い箇所に人感センサ603,604,605(赤外線センサ、超音波センサ、等)を設置し、死角を補完している。
【0034】
これら人感センサ603,604,605の検出結果に応じてカメラ601を移動させることで、効率的な監視が可能となる。
【0035】
人感センサ603,604,605に反応が無い場合には、カメラ601をHの位置に移動し、エントランス(入り口)606、レジカウンタ607のモニタリングに使用する等、兼用が可能となる。
【0036】
本実施例3では、レール軌道602にカーブが存在するため、カーブに応じたカメラ姿勢を補正する必要がある。
【0037】
ここで、カメラ601がFの位置で被写体608,609をモニタしている場合には、Gの位置に移動すれば正面からのモニタリングが可能となる。
【0038】
図7は本実施例3の動作フローチャートであり、以下に、この動作フローチャートに従って動作の説明を行う。
(ステップ701)開始
(ステップ702)人感センサ603,604,605が反応した場合にはステップ703に移行し、反応していない場合にはステップ705に移行する。
(ステップ703)カメラ601を反応した人感センサの位置に移動する。ステップ704に移行する。
(ステップ704)対象被写体の監視を行う。ステップ707へ移行する。
(ステップ705)カメラ601をHの位置に移動する。ステップ706へ移行する。
(ステップ706)入り口606の監視を行う。ステップ707へ移行する。
(ステップ707)終了。
【0039】
また、実施例3では人の存在を検知する感知手段として人感センサが用いられているが、人感センサの代わりに、小型の監視カメラを設置することも考えられる。
【0040】
以上、本発明の好ましい実施例1ないし3について説明したが、本発明はこれらの実施例に限定されず、その要旨の範囲内で種々の変形及び変更が可能である。
【符号の説明】
【0041】
101 カメラ
102 レール軌道
103 被写体
L 被写体距離
【特許請求の範囲】
【請求項1】
被写体との距離である被写体距離を検出する被写体距離検出手段を備えたカメラと、
前記カメラの撮影方向を変更可能な撮影方向変更手段と、
前記カメラを移動させる移動手段と、
前記移動手段により移動した移動距離を検出する移動距離検出手段と、
前記被写体距離と前記移動距離により、前記カメラと前記被写体との角度を算出し、前記角度を元に前記撮影方向変更手段により前記カメラの撮影方向を変更する制御手段とを有することを特徴とするカメラシステム。
【請求項2】
前記被写体距離検出手段は、前記カメラのフォーカスレンズ合焦位置から前記被写体距離を検出することを特徴とする請求項1に記載のカメラシステム。
【請求項3】
前記カメラは、撮影画角を変更可能な撮影画角変更手段を備え、
前記制御手段は、前記被写体距離と前記移動距離に応じて前記撮影画角変更手段に前記撮影画角の変更を行わせることで、被写体像の大きさを一定に保つことを特徴とする請求項1または2のいずれか1項に記載のカメラシステム。
【請求項4】
前記カメラは、被写体像の動きベクトルにより被写体像の水平方向および垂直方向の移動量を算出し、
前記制御手段は、前記水平方向の移動量に応じたパンニング角度の加減算による前記撮影方向の補正を行い、前記垂直方向の移動量に応じたチルティングによる前記撮影方向の補正を行うことを特徴とする請求項1ないし3のいずれか1項に記載のカメラシステム。
【請求項5】
人の存在を感知する感知手段をさらに有し、
前記制御手段は、前記感知手段により人の存在を感知したときには、前記移動手段による前記カメラの移動を開始させることを特徴とする請求項1ないし4のいずれか1項に記載のカメラシステム。
【請求項1】
被写体との距離である被写体距離を検出する被写体距離検出手段を備えたカメラと、
前記カメラの撮影方向を変更可能な撮影方向変更手段と、
前記カメラを移動させる移動手段と、
前記移動手段により移動した移動距離を検出する移動距離検出手段と、
前記被写体距離と前記移動距離により、前記カメラと前記被写体との角度を算出し、前記角度を元に前記撮影方向変更手段により前記カメラの撮影方向を変更する制御手段とを有することを特徴とするカメラシステム。
【請求項2】
前記被写体距離検出手段は、前記カメラのフォーカスレンズ合焦位置から前記被写体距離を検出することを特徴とする請求項1に記載のカメラシステム。
【請求項3】
前記カメラは、撮影画角を変更可能な撮影画角変更手段を備え、
前記制御手段は、前記被写体距離と前記移動距離に応じて前記撮影画角変更手段に前記撮影画角の変更を行わせることで、被写体像の大きさを一定に保つことを特徴とする請求項1または2のいずれか1項に記載のカメラシステム。
【請求項4】
前記カメラは、被写体像の動きベクトルにより被写体像の水平方向および垂直方向の移動量を算出し、
前記制御手段は、前記水平方向の移動量に応じたパンニング角度の加減算による前記撮影方向の補正を行い、前記垂直方向の移動量に応じたチルティングによる前記撮影方向の補正を行うことを特徴とする請求項1ないし3のいずれか1項に記載のカメラシステム。
【請求項5】
人の存在を感知する感知手段をさらに有し、
前記制御手段は、前記感知手段により人の存在を感知したときには、前記移動手段による前記カメラの移動を開始させることを特徴とする請求項1ないし4のいずれか1項に記載のカメラシステム。
【図1】


【図2】
【図3】
【図4】

【図5】

【図6】
【図7】
【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−106175(P2013−106175A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−248529(P2011−248529)
【出願日】平成23年11月14日(2011.11.14)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月14日(2011.11.14)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]