
カメラパラメータ取得装置およびカメラパラメータ取得方法
【課題】配線数が制限されるような場合であっても、カメラの内部パラメータを確実に取得することができ、カメラによる撮影映像を利用した良好な画像の表示を実現することができる「カメラパラメータ取得装置およびカメラパラメータ取得方法」を提供すること。
【解決手段】カメラ2内に、レンズ6の像高特性を示す像高特性情報を保持しておき、カメラ2に、通常の撮影環境では撮影されない映像を撮影させ、これを契機として、カメラ2からの情報の出力モードを像高特性出力モードへと切り替えさせ、像高特性出力モードにおいてカメラ2から出力された像高特性曲線映像を映像ライン5を介して取得し、取得された像高特性曲線映像から内部パラメータを算出して取得すること。
【解決手段】カメラ2内に、レンズ6の像高特性を示す像高特性情報を保持しておき、カメラ2に、通常の撮影環境では撮影されない映像を撮影させ、これを契機として、カメラ2からの情報の出力モードを像高特性出力モードへと切り替えさせ、像高特性出力モードにおいてカメラ2から出力された像高特性曲線映像を映像ライン5を介して取得し、取得された像高特性曲線映像から内部パラメータを算出して取得すること。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、カメラパラメータ取得装置およびカメラパラメータ取得方法に係り、特に、カメラの内部パラメータを取得するのに好適なカメラパラメータ取得装置およびカメラパラメータ取得方法に関する。
【背景技術】
【0002】
近年、カメラ技術および画像処理技術の進展にともない、カメラによる撮影映像を利用して種々の画像を生成してディスプレイに表示することが行われるようになった。
【0003】
このようなカメラによる撮影映像を利用した画像の生成および表示を行う技術の一例としては、車両の周辺を監視するための車両周辺監視画像を車内のディスプレイに表示する車両周辺監視装置が採用されていた。
【0004】
このような車両周辺監視装置においては、車両における互いに異なる位置に取り付けられた魚眼レンズを備えた複数台のカメラによって、車両の周辺をそれぞれ撮影するようになっていた。
【0005】
そして、撮影された各カメラによる撮影映像を、マッピングテーブルと称される変換テーブルを用いてディスプレイ座標系上の画像へと座標変換し、座標変換後の画像を互いに合成する(繋ぎ合わせる)ことによって、車両周辺監視画像として、トップビュー画像と称される車両およびその周辺を車両の上方の仮想視点から見下ろした俯瞰画像を生成してディスプレイに表示するようになっていた。
【0006】
ところで、このようなカメラによる撮影映像に基づく画像の生成・表示の際に、画像のずれ(トップビュー画像の場合には、座標変換後の画像同士の重なりや隙間)の少ない良好な画像を表示するには、カメラの製造時の誤差を示す内部パラメータを考慮して、誤差が補正された画像を生成することが重要となる。トップビュー画像の場合には、各カメラの内部パラメータを加味してマッピングテーブルを作成する必要がある。
【0007】
そこで、これまでにも、前述した車両周辺監視装置に例示されるようなカメラによる撮影映像を用いた画像の表示を行うシステムにおいては、システムの製造時(換言すればカメラの最初の取り付け時)やカメラの交換時に、ECU(Electric Control Unit)等のシステム本体においてカメラの内部パラメータを取得することが行われていた。
【0008】
そのための具体的な方法として、従来は、カメラにおけるレンズの像高特性を示す像高特性情報をカメラの内部に保持しておくとともに、システム本体とカメラとを、カメラによる撮影映像の入出力に用いる映像ラインとは別個の制御ラインによって接続するようになっていた。そして、システム本体において、カメラの内部に保持された像高特性情報を、制御ラインを介した通信(像高特性情報の要求および応答)によって取得し、取得された像高特性情報に基づいて、内部パラメータを算出して取得するようになっていた。
【0009】
【特許文献1】特許第3286306号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
しかしながら、カメラの取り付け位置によっては、制御ラインを設けることが困難な場合があった。例えば、車両周辺監視装置において、配線が困難な車両の可動部(例えば、ドアミラー)にカメラを取り付ける場合や、配線スペースが狭い車種の車両における所定の取り付け位置にカメラを取り付ける場合には、カメラによる撮影映像を出力するための映像ラインを配線するだけで精一杯となり、制御ラインを設けることが非常に困難な場合があった。
【0011】
そこで、本発明は、このような問題点に鑑みなされたものであり、カメラの取り付け位置に応じて配線数が制限されるような場合であっても、カメラの内部パラメータを確実に取得することができ、ひいては、カメラによる撮影映像を利用した良好な画像の表示を実現することができるカメラパラメータ取得装置およびカメラパラメータ取得方法を提供することを目的とするものである。
【課題を解決するための手段】
【0012】
前述した目的を達成するため、本発明に係るカメラパラメータ取得装置は、カメラの内部パラメータを取得するためのカメラパラメータ取得装置であって、前記カメラに配設され、前記カメラにおけるレンズの像高特性を示す像高特性情報を保持する像高特性情報保持手段と、前記カメラに配設され、前記カメラからの情報の出力モードを、前記カメラによる撮影映像を出力するための通常出力モードと、前記像高特性情報保持手段によって保持された前記像高特性情報を映像化した像高特性曲線映像を出力するための像高特性出力モードとの間で切り替える出力モード切り替え手段と、前記カメラに映像ラインを介して接続され、前記通常出力モードにおいて前記カメラから出力された撮影映像または前記像高特性出力モードにおいて前記カメラから出力された前記像高特性曲線映像が、前記映像ラインを介して入力されるように形成され、前記像高特性曲線映像が入力された場合に、入力された前記像高特性曲線映像に基づいて前記カメラの内部パラメータを算出するように形成されたパラメータ算出手段とを備えたことを特徴としている。そして、このような構成によれば、パラメータ算出手段により、映像ラインを介してカメラから取得された像高特性曲線映像に基づいてカメラの内部パラメータを算出して取得することが可能となる。
【0013】
また、本発明に係る他のカメラパラメータ取得装置は、前記出力モード切り替え手段が、前記カメラによって通常の撮影環境では撮影されない映像が撮影されたことを契機として、前記出力モードを前記通常出力モードから前記像高特性出力モードへと切り替えるように形成されていることを特徴としている。そして、このような構成によれば、カメラに通常の撮影環境では撮影されない映像を撮影させることによって、出力モードを通常出力モードから像高特性出力モードへと切り替えることが可能となる。
【0014】
さらに、本発明に係る他のカメラパラメータ取得装置は、前記カメラが、車両に取り付けられたカメラとされ、前記カメラにおけるレンズが、超広角レンズとされていることを特徴としている。そして、このような構成によれば、パラメータ算出手段により、映像ラインを介して車両に取り付けられたカメラから取得された超広角レンズの像高特性曲線映像に基づいてカメラの内部パラメータを算出して取得することが可能となる。
【0015】
さらにまた、本発明に係るカメラパラメータ取得方法は、カメラの内部パラメータを取得するためのカメラパラメータ取得方法であって、前記カメラ内に、前記カメラにおけるレンズの像高特性を示す像高特性情報を保持しておき、前記カメラに、通常の撮影環境では撮影されない映像を撮影させ、この撮影を契機として、前記カメラからの情報の出力モードを、前記カメラによる撮影映像を出力するための通常出力モードから、前記像高特性情報を映像化した像高特性曲線映像を出力するための像高特性出力モードへと切り替えさせ、前記像高特性出力モードにおいて前記カメラから出力された前記像高特性曲線映像を映像ラインを介して取得し、取得された前記像高特性曲線映像から前記カメラの内部パラメータを算出して取得することを特徴としている。そして、このような方法によれば、通常の撮影環境では撮影されない映像をカメラに撮影させ、これを契機として、カメラの出力モードを通常出力モードから像高特性出力モードへと切り替えさせ、この像高特性出力モードにおいてカメラから出力された像高特性曲線映像を映像ラインを介して取得し、取得された像高特性曲線映像に基づいてカメラの内部パラメータを算出して取得することが可能となる。
【0016】
また、本発明に係る他のカメラパラメータ取得方法は、前記カメラを、車両に取り付け、前記カメラにおけるレンズとして、超広角レンズを用いることを特徴としている。そして、このような方法によれば、映像ラインを介して車両に取り付けられたカメラから取得された超広角レンズの像高特性曲線映像に基づいてカメラの内部パラメータを算出して取得することが可能となる。
【発明の効果】
【0017】
本発明に係るカメラパラメータ取得装置によれば、パラメータ算出手段により、映像ラインを介してカメラから取得された像高特性曲線映像に基づいてカメラの内部パラメータを算出して取得することができるので、カメラの取り付け位置に応じて配線数が制限され、制御ラインを設けることができない場合であっても、カメラの内部パラメータを確実に取得することができ、ひいては、カメラによる撮影映像を利用した良好な画像の表示を実現することができる。
【0018】
また、本発明に係る他のカメラパラメータ取得装置によれば、カメラに通常の撮影環境では撮影されない映像を撮影させることによって、出力モードを通常出力モードから像高特性出力モードへと切り替えることができるので、制御ラインを用いたカメラの制御を要することなく、簡便な手法によってカメラの内部パラメータを確実に取得することができる。
【0019】
さらに、本発明に係る他のカメラパラメータ取得装置によれば、パラメータ算出手段により、映像ラインを介して車両に取り付けられたカメラから取得された超広角レンズの像高特性曲線映像に基づいてカメラの内部パラメータを算出して取得することができるので、車両におけるカメラの取り付け位置に応じて配線数が制限され、制御ラインを設けることができない場合であっても、カメラの内部パラメータを確実に取得することができ、ひいては、カメラによる撮影映像を利用した良好な車両周辺監視画像の表示を実現することができる。
【0020】
さらにまた、本発明に係るカメラパラメータ取得方法によれば、通常の撮影環境では撮影されない映像をカメラに撮影させ、これを契機として、カメラの出力モードを通常出力モードから像高特性出力モードへと切り替えさせ、この像高特性出力モードにおいてカメラから出力された像高特性曲線映像を映像ラインを介して取得し、取得された像高特性曲線映像に基づいてカメラの内部パラメータを算出して取得することができるので、カメラの取り付け位置に応じて配線数が制限され、制御ラインを設けることができない場合であっても、カメラの内部パラメータを確実に取得することができ、ひいては、カメラによる撮影映像を利用した良好な画像の表示を実現することができる。
【0021】
また、本発明に係る他のカメラパラメータ取得方法によれば、車両におけるカメラの取り付け位置に応じて配線数が制限され、制御ラインを設けることができない場合であっても、カメラの内部パラメータを確実に取得することができ、ひいては、カメラによる撮影映像を利用した良好な車両周辺監視画像の表示を実現することができる。
【発明を実施するための最良の形態】
【0022】
以下、本発明に係るカメラパラメータ取得装置の実施形態について、図1乃至図3を参照して説明する。
【0023】
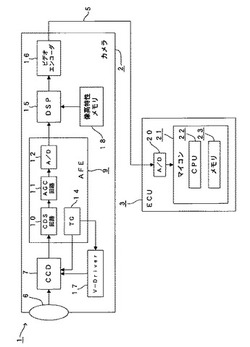
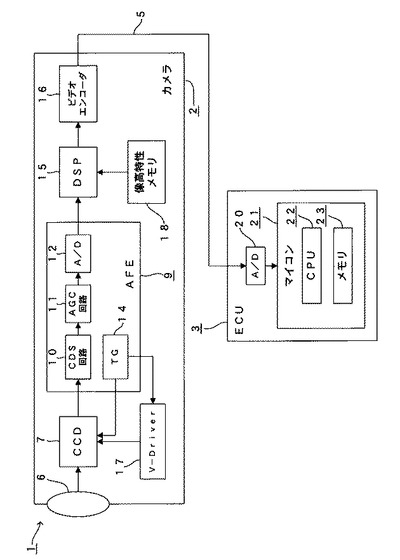
図1に示すように、本実施形態におけるカメラパラメータ取得装置1は、大別して、車両における所定の取り付け位置(例えば、ドアミラー)に取り付けられたカメラ2と、パラメータ算出手段としてのECU3と、これらのカメラ2とECU3とを接続する映像ライン5とによって構成されている。なお、前記カメラ2は、車両における互いに異なる取り付け位置に複数台取り付けられていてもよいことは勿論である。
【0024】
カメラ2について詳述すると、図1に示すように、カメラ2は、魚眼レンズ等の超広角レンズ6を有しており、この超広角レンズ6は、車両の周辺の物体(路面等)から入射した光を集光するようになっている。
【0025】
また、カメラ2は、CCD(Charge Coupled Device:電荷結合素子)7を有しており、このCCD7の受光面には、超広角レンズ6によって集光された光が結合されるようになっている。
【0026】
CCD7は、受光面に結合された光を撮影映像のデータであるRAWデータ(生データ)に光電変換してカメラ2のさらに内部に出力するようになっている。
【0027】
CCD7の出力側には、AFE(Analog Front End)9が接続されており、このAFE9には、CCD7から出力されたRAWデータが入力されるようになっている。
【0028】
AFE9は、CDS(Cor-related Double Sampling)回路10と、このCDS回路10の後段に接続されたAGC(Auto Gain Control)回路11と、このAGC回路11の後段に接続されたA−Dコンバータ(A/D)12と、TG(Timing Generator)14とを有している。
【0029】
CDS回路10は、CCD7から入力されたRAWデータに対してノイズを除去する処理を行い、処理後のRAWデータをAGC回路11に出力するようになっている。
【0030】
AGC回路11は、後段のA/D12がRAWデータをA−D変換する際の入力ゲインを、所定の露出に応じた値に制御することによって、カメラ2の自動露出を行うようになっている。
【0031】
A/D12は、AGC回路11による入力ゲインの制御の下でRAWデータをA−D変換してAFE9から出力するようになっている。
【0032】
TG14は、CCD7における水平CCDを駆動するようになっている。
【0033】
TG14とCCD7との間には、V−Driver17が接続されており、このV−Driver17は、TG14の出力電圧の電圧レベルを変換し、変換後の電圧を用いることによって、CCD7における垂直CCDを駆動するようになっている。
【0034】
AFE9には、DSP(Digital Signal Processor)15が接続されており、このDSP15には、A/D12から出力されたA−D変換後のRAWデータが入力されるようになっている。
【0035】
DSP15は、入力されたRAWデータに対して信号の加工や補正(γ補正等)を行うことによって、RAWデータをYUV信号に変換して出力するようになっている。なお、この処理は、カメラ2からのデータの出力モードが、後述する通常出力モードに維持されまたは切り替えられている場合に行われることになる。
【0036】
DSP15の出力側には、ビデオエンコーダ16が接続されており、このビデオエンコーダ16には、DSP15から出力されたYUV信号が入力されるようになっている。
【0037】
そして、ビデオエンコーダ16は、入力されたYUV信号をD−A変換によってNTSC(National Television Standards Committee)信号に変換してECU3側に出力するようになっている。
【0038】
このようにして、カメラ2による撮影映像のデータが、NTSC信号としてカメラ2から出力された後に、映像ライン5を介してECU3に入力されるようになっている。
【0039】
そして、本実施形態において、DSP15には、像高特性情報保持手段としての像高特性メモリ18が接続されており、この像高特性メモリ18には、カメラ2における超広角レンズ6の像高特性を示す像高特性情報が記憶されて保持されている。像高特性情報の一例としては、例えば、K1=147.393093、K2=13.856319、K3=-36.794166、K4=56.929522、K5=-19.650417(各Kは、像高特性を表す)、CCD7の受光面の中心を原点とした二次元座標系(XY座標系)におけるレンズの中心位置のX座標cx=317.951558、および、当該二次元座標系におけるレンズの中心位置のY座標cy=237.498172等を挙げることができる。
【0040】
さらに、本実施形態において、DSP15は、出力モード切替手段として機能するようになっている。
【0041】
すなわち、DSP15は、A/D12側から入力されたRAWデータが、通常の撮影環境において撮影された撮影映像のデータであるか否かを判定する映像判定を行うようになっている。なお、この映像判定の判定基準としては、種々の基準を設けるようにしてもよく、例えば、映像全体が単一色を帯びている場合には、通常の撮影環境において撮影された撮影映像のデータではないと判定するようなものであってもよい。
【0042】
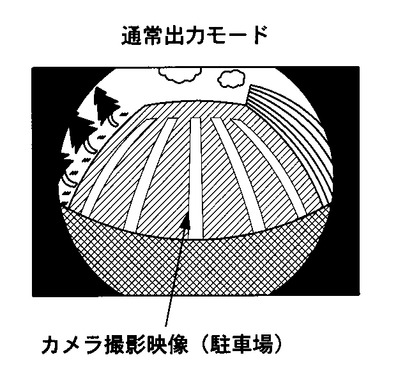
そして、この映像判定の結果、A/D12側から入力されたRAWデータが、通常の撮影環境において撮影された撮影映像のデータである場合には、DSP15は、カメラ2からのデータ(情報)の出力モードを、図2に示すようなカメラ2による撮影映像のデータを出力するための通常出力モードに維持するか、または、後述する像高特性出力モードから当該通常出力モードへと切り替えるようになっている。
【0043】
この通常出力モードにおいて、DSP15は、A/D12側から入力されたRAWデータを、前述のようにYUV信号に変換して出力するようになっている。一方、映像判定の結果、A/D12側から入力されたRAWデータが、通常の撮影環境において撮影された撮影映像のデータではない場合、すなわち通常の撮影環境において撮影されない撮影映像のデータである場合には、DSP15は、カメラ2からのデータの出力モードを、像高特性出力モードに維持するか、または、通常出力モードから当該像高特性出力モードへと切り替えるようになっている。
【0044】
この像高特性出力モードにおいて、DSP15は、A/D12側から入力されたRAWデータを出力することはせず、代りに、像高特性メモリ18に保持された像高特性情報を読み出すようになっている。
【0045】
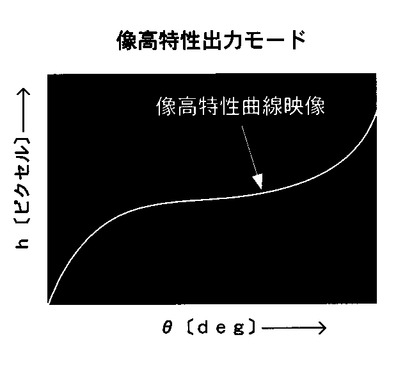
そして、DSP15は、像高特性メモリ18から読み出された像高特性情報を、この像高特性情報を映像として示す像高特性曲線の映像(以下、像高特性曲線映像と称する)に変換(映像化)し、この像高特性曲線映像のデータを出力するようになっている。
【0046】
なお、図3に示すように、像高特性曲線映像は、CCD7の受光面上の結像点に結像された光が光軸との間になす角度である入射角度θ〔deg〕(図3における横軸)と、CCD7の受光面における中心点からの当該結像点までの距離h〔ピクセル〕との相関関係を示す曲線として知られている。
【0047】
このDSP15から出力された像高特性曲線映像のデータは、ビデオエンコーダ16によってNTSC信号に変換された上でカメラ2から出力され、その後、映像ライン5を介してECU3に入力されるようになっている。
【0048】
次に、ECU3について詳述すると、このECU3は、A−Dコンバータ(A/D)20を有しており、このA/D20には、カメラ2から出力されたデータが入力されるようになっている。そして、A/D20は、入力されたデータを、A−D変換してECU3のさらに内部に出力するようになっている。
【0049】
A/D20には、マイコン21が接続されており、このマイコン21には、A/D20から出力されたデータが入力されるようになっている。
【0050】
マイコン21は、メモリ23を有しており、このメモリ23には、カメラ2の内部パラメータの計算式が記憶されている。この計算式は、例えば、カメラ2の内部パラメータとして、CCD7の受光面上にとられた前述したレンズの中心位置(cx,cy)を原点(r=0,φ=0)とみなした二次元極座標〔r,φ〕における原点(r=0,φ=0)から光の結像点までの距離rを求める計算式として、次式の情報が記憶されている。
【0051】
r=K1×φ+K2×φ2+K3×φ3+K4×φ4+K5×φ5
【0052】
ただし、K1〜K5は、前述した像高特性である。また、φは、前述した二次元極座標における光の結像点の角度である。
【0053】
CPU22は、A/D20側から入力されたデータが、像高特性曲線映像のデータである場合には、メモリ23からカメラ2の内部パラメータの計算式を読み出し、読み出された計算式に、像高特性曲線映像から抽出された像高特性情報を代入することによって、カメラ2の内部パラメータを算出するようになっている。
【0054】
一方、CPU22は、A/D20側から入力されたデータが、カメラ2による撮影映像のデータである場合には、内部パラメータの算出は行わないようになっている。
【0055】
したがって、本実施形態においては、映像ライン5を介して入力された像高特性曲線映像のデータに基づいて、カメラ2の内部パラメータを取得することができるようになっている。
【0056】
次に、前述したカメラパラメータ取得装置1を適用した本発明に係るカメラパラメータ取得方法の実施形態について説明する。
【0057】
なお、便宜上、初期状態においては、DSP15により、カメラ2からのデータの出力モードが、通常出力モードに維持されているものとする。また、カメラ2は、車両に取り付けられ、ECU3に接続された直後の状態とされており、カメラ2による車両の周辺の撮影は未だに行われていないものとする。
【0058】
そして、初期状態から、カメラ2の内部パラメータの取得を開始すると、まず、カメラ2に、通常の撮影環境では撮影されない映像を撮影させる。このような映像を撮影させる方法の一例としては、例えば、カメラ2を真っ赤なケースで囲むことによって、映像全体が赤みを帯びた撮影映像を撮影させるようにしてもよい。
【0059】
カメラ2による撮影映像は、CCD7から、CDS回路10、AGC回路11およびA/D12を順次経た後に、RAWデータとしてDSP15に入力される。
【0060】
次いで、DSP15により、入力されたRAWデータに対する映像判定を行い、このRAWデータが、通常の撮影環境において撮影された撮影映像のデータではない旨の判定を行う。
【0061】
次いで、DSP15により、カメラ2からのデータの出力モードを通常出力モードから像高特性出力モードへと切り替える。
【0062】
そして、像高特性出力モードにおいて、DSP15により、像高特性メモリ18から像高特性情報を読み出すとともに、読み出された像高特性情報を、像高特性曲線映像に変換して出力する。
【0063】
次いで、DSP15から出力された像高特性曲線映像のデータを、ビデオエンコーダ16によってNTSC信号に変換した上でカメラ2から出力し、出力された像高特性曲線映像のデータを、映像ライン5を介してECU3に入力する。
【0064】
次いで、ECU3に入力された像高特性曲線映像のデータを、ECU3におけるA/D20によってデジタル信号に変換し、変換されたデータを、ECU3におけるマイコン21に入力する。
【0065】
次いで、マイコン21におけるCPU22により、マイコン21に入力されたデータが、像高特性曲線映像のデータである旨の判定を行う。
【0066】
次いで、CPU22により、入力された像高特性曲線映像のデータから像高特性情報を抽出するとともに、メモリ23から、カメラ2の内部パラメータの計算式を読み出す。
【0067】
そして、CPU22により、メモリ23から読み出された計算式に、前記抽出された像高特性情報を当てはめることにより、カメラ2の内部パラメータを算出することができる。
【0068】
以上述べたように、本実施形態によれば、ECU3により、映像ライン5を介してカメラ2から取得された像高特性曲線映像に基づいてカメラ2の内部パラメータを算出して取得することができる。これにより、カメラ2の取り付け位置に応じて配線数が制限され、制御ラインを設けることができない場合であっても、カメラ2の内部パラメータを確実に取得することができ、ひいては、カメラ2による撮影映像を利用した良好な車両周辺監視画像の表示を実現することができる。
【0069】
なお、本発明は、前述した実施形態に限定されるものではなく、必要に応じて種々の変更が可能である。
【0070】
例えば、CPU22に、算出されたカメラ2の内部パラメータを用いて車両周辺監視画像を生成するためのマッピングテーブルを補正する機能や、マッピングテーブルを用いてカメラ2による撮影映像を変換して車両周辺監視画像を生成する機能を持たせてもよいことは勿論である。この場合には、たとえば、マイコン21のメモリ23内にマッピングテーブルを格納しておけばよい。
【0071】
また、本発明は、トップビュー画像の生成のために複数台のカメラを備えた車両周辺監視装置に適用することができることは勿論である。
【0072】
さらに、本発明は、システム本体(例えばECU)側においてカメラの内部パラメータを取得することが前提となるカメラによる撮影映像に基づく画像の表示を行うシステムであれば、前述した車両周辺監視装置以外のシステムに適用するようにしてもよい。
【図面の簡単な説明】
【0073】
【図1】本発明に係るカメラパラメータ取得装置の実施形態を示すブロック図
【図2】本発明に係るカメラパラメータ取得装置の実施形態において、通常出力モードにおいて出力されるカメラによる撮影映像の一例を示す図
【図3】本発明に係るカメラパラメータ取得装置の実施形態において、像高特性出力モードにおいて出力される像高特性曲線映像の一例を示す図
【符号の説明】
【0074】
1 カメラパラメータ取得装置
2 カメラ
3 ECU
5 映像ライン
6 超広角レンズ
15 DSP
18 像高特性メモリ
【技術分野】
【0001】
本発明は、カメラパラメータ取得装置およびカメラパラメータ取得方法に係り、特に、カメラの内部パラメータを取得するのに好適なカメラパラメータ取得装置およびカメラパラメータ取得方法に関する。
【背景技術】
【0002】
近年、カメラ技術および画像処理技術の進展にともない、カメラによる撮影映像を利用して種々の画像を生成してディスプレイに表示することが行われるようになった。
【0003】
このようなカメラによる撮影映像を利用した画像の生成および表示を行う技術の一例としては、車両の周辺を監視するための車両周辺監視画像を車内のディスプレイに表示する車両周辺監視装置が採用されていた。
【0004】
このような車両周辺監視装置においては、車両における互いに異なる位置に取り付けられた魚眼レンズを備えた複数台のカメラによって、車両の周辺をそれぞれ撮影するようになっていた。
【0005】
そして、撮影された各カメラによる撮影映像を、マッピングテーブルと称される変換テーブルを用いてディスプレイ座標系上の画像へと座標変換し、座標変換後の画像を互いに合成する(繋ぎ合わせる)ことによって、車両周辺監視画像として、トップビュー画像と称される車両およびその周辺を車両の上方の仮想視点から見下ろした俯瞰画像を生成してディスプレイに表示するようになっていた。
【0006】
ところで、このようなカメラによる撮影映像に基づく画像の生成・表示の際に、画像のずれ(トップビュー画像の場合には、座標変換後の画像同士の重なりや隙間)の少ない良好な画像を表示するには、カメラの製造時の誤差を示す内部パラメータを考慮して、誤差が補正された画像を生成することが重要となる。トップビュー画像の場合には、各カメラの内部パラメータを加味してマッピングテーブルを作成する必要がある。
【0007】
そこで、これまでにも、前述した車両周辺監視装置に例示されるようなカメラによる撮影映像を用いた画像の表示を行うシステムにおいては、システムの製造時(換言すればカメラの最初の取り付け時)やカメラの交換時に、ECU(Electric Control Unit)等のシステム本体においてカメラの内部パラメータを取得することが行われていた。
【0008】
そのための具体的な方法として、従来は、カメラにおけるレンズの像高特性を示す像高特性情報をカメラの内部に保持しておくとともに、システム本体とカメラとを、カメラによる撮影映像の入出力に用いる映像ラインとは別個の制御ラインによって接続するようになっていた。そして、システム本体において、カメラの内部に保持された像高特性情報を、制御ラインを介した通信(像高特性情報の要求および応答)によって取得し、取得された像高特性情報に基づいて、内部パラメータを算出して取得するようになっていた。
【0009】
【特許文献1】特許第3286306号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
しかしながら、カメラの取り付け位置によっては、制御ラインを設けることが困難な場合があった。例えば、車両周辺監視装置において、配線が困難な車両の可動部(例えば、ドアミラー)にカメラを取り付ける場合や、配線スペースが狭い車種の車両における所定の取り付け位置にカメラを取り付ける場合には、カメラによる撮影映像を出力するための映像ラインを配線するだけで精一杯となり、制御ラインを設けることが非常に困難な場合があった。
【0011】
そこで、本発明は、このような問題点に鑑みなされたものであり、カメラの取り付け位置に応じて配線数が制限されるような場合であっても、カメラの内部パラメータを確実に取得することができ、ひいては、カメラによる撮影映像を利用した良好な画像の表示を実現することができるカメラパラメータ取得装置およびカメラパラメータ取得方法を提供することを目的とするものである。
【課題を解決するための手段】
【0012】
前述した目的を達成するため、本発明に係るカメラパラメータ取得装置は、カメラの内部パラメータを取得するためのカメラパラメータ取得装置であって、前記カメラに配設され、前記カメラにおけるレンズの像高特性を示す像高特性情報を保持する像高特性情報保持手段と、前記カメラに配設され、前記カメラからの情報の出力モードを、前記カメラによる撮影映像を出力するための通常出力モードと、前記像高特性情報保持手段によって保持された前記像高特性情報を映像化した像高特性曲線映像を出力するための像高特性出力モードとの間で切り替える出力モード切り替え手段と、前記カメラに映像ラインを介して接続され、前記通常出力モードにおいて前記カメラから出力された撮影映像または前記像高特性出力モードにおいて前記カメラから出力された前記像高特性曲線映像が、前記映像ラインを介して入力されるように形成され、前記像高特性曲線映像が入力された場合に、入力された前記像高特性曲線映像に基づいて前記カメラの内部パラメータを算出するように形成されたパラメータ算出手段とを備えたことを特徴としている。そして、このような構成によれば、パラメータ算出手段により、映像ラインを介してカメラから取得された像高特性曲線映像に基づいてカメラの内部パラメータを算出して取得することが可能となる。
【0013】
また、本発明に係る他のカメラパラメータ取得装置は、前記出力モード切り替え手段が、前記カメラによって通常の撮影環境では撮影されない映像が撮影されたことを契機として、前記出力モードを前記通常出力モードから前記像高特性出力モードへと切り替えるように形成されていることを特徴としている。そして、このような構成によれば、カメラに通常の撮影環境では撮影されない映像を撮影させることによって、出力モードを通常出力モードから像高特性出力モードへと切り替えることが可能となる。
【0014】
さらに、本発明に係る他のカメラパラメータ取得装置は、前記カメラが、車両に取り付けられたカメラとされ、前記カメラにおけるレンズが、超広角レンズとされていることを特徴としている。そして、このような構成によれば、パラメータ算出手段により、映像ラインを介して車両に取り付けられたカメラから取得された超広角レンズの像高特性曲線映像に基づいてカメラの内部パラメータを算出して取得することが可能となる。
【0015】
さらにまた、本発明に係るカメラパラメータ取得方法は、カメラの内部パラメータを取得するためのカメラパラメータ取得方法であって、前記カメラ内に、前記カメラにおけるレンズの像高特性を示す像高特性情報を保持しておき、前記カメラに、通常の撮影環境では撮影されない映像を撮影させ、この撮影を契機として、前記カメラからの情報の出力モードを、前記カメラによる撮影映像を出力するための通常出力モードから、前記像高特性情報を映像化した像高特性曲線映像を出力するための像高特性出力モードへと切り替えさせ、前記像高特性出力モードにおいて前記カメラから出力された前記像高特性曲線映像を映像ラインを介して取得し、取得された前記像高特性曲線映像から前記カメラの内部パラメータを算出して取得することを特徴としている。そして、このような方法によれば、通常の撮影環境では撮影されない映像をカメラに撮影させ、これを契機として、カメラの出力モードを通常出力モードから像高特性出力モードへと切り替えさせ、この像高特性出力モードにおいてカメラから出力された像高特性曲線映像を映像ラインを介して取得し、取得された像高特性曲線映像に基づいてカメラの内部パラメータを算出して取得することが可能となる。
【0016】
また、本発明に係る他のカメラパラメータ取得方法は、前記カメラを、車両に取り付け、前記カメラにおけるレンズとして、超広角レンズを用いることを特徴としている。そして、このような方法によれば、映像ラインを介して車両に取り付けられたカメラから取得された超広角レンズの像高特性曲線映像に基づいてカメラの内部パラメータを算出して取得することが可能となる。
【発明の効果】
【0017】
本発明に係るカメラパラメータ取得装置によれば、パラメータ算出手段により、映像ラインを介してカメラから取得された像高特性曲線映像に基づいてカメラの内部パラメータを算出して取得することができるので、カメラの取り付け位置に応じて配線数が制限され、制御ラインを設けることができない場合であっても、カメラの内部パラメータを確実に取得することができ、ひいては、カメラによる撮影映像を利用した良好な画像の表示を実現することができる。
【0018】
また、本発明に係る他のカメラパラメータ取得装置によれば、カメラに通常の撮影環境では撮影されない映像を撮影させることによって、出力モードを通常出力モードから像高特性出力モードへと切り替えることができるので、制御ラインを用いたカメラの制御を要することなく、簡便な手法によってカメラの内部パラメータを確実に取得することができる。
【0019】
さらに、本発明に係る他のカメラパラメータ取得装置によれば、パラメータ算出手段により、映像ラインを介して車両に取り付けられたカメラから取得された超広角レンズの像高特性曲線映像に基づいてカメラの内部パラメータを算出して取得することができるので、車両におけるカメラの取り付け位置に応じて配線数が制限され、制御ラインを設けることができない場合であっても、カメラの内部パラメータを確実に取得することができ、ひいては、カメラによる撮影映像を利用した良好な車両周辺監視画像の表示を実現することができる。
【0020】
さらにまた、本発明に係るカメラパラメータ取得方法によれば、通常の撮影環境では撮影されない映像をカメラに撮影させ、これを契機として、カメラの出力モードを通常出力モードから像高特性出力モードへと切り替えさせ、この像高特性出力モードにおいてカメラから出力された像高特性曲線映像を映像ラインを介して取得し、取得された像高特性曲線映像に基づいてカメラの内部パラメータを算出して取得することができるので、カメラの取り付け位置に応じて配線数が制限され、制御ラインを設けることができない場合であっても、カメラの内部パラメータを確実に取得することができ、ひいては、カメラによる撮影映像を利用した良好な画像の表示を実現することができる。
【0021】
また、本発明に係る他のカメラパラメータ取得方法によれば、車両におけるカメラの取り付け位置に応じて配線数が制限され、制御ラインを設けることができない場合であっても、カメラの内部パラメータを確実に取得することができ、ひいては、カメラによる撮影映像を利用した良好な車両周辺監視画像の表示を実現することができる。
【発明を実施するための最良の形態】
【0022】
以下、本発明に係るカメラパラメータ取得装置の実施形態について、図1乃至図3を参照して説明する。
【0023】
図1に示すように、本実施形態におけるカメラパラメータ取得装置1は、大別して、車両における所定の取り付け位置(例えば、ドアミラー)に取り付けられたカメラ2と、パラメータ算出手段としてのECU3と、これらのカメラ2とECU3とを接続する映像ライン5とによって構成されている。なお、前記カメラ2は、車両における互いに異なる取り付け位置に複数台取り付けられていてもよいことは勿論である。
【0024】
カメラ2について詳述すると、図1に示すように、カメラ2は、魚眼レンズ等の超広角レンズ6を有しており、この超広角レンズ6は、車両の周辺の物体(路面等)から入射した光を集光するようになっている。
【0025】
また、カメラ2は、CCD(Charge Coupled Device:電荷結合素子)7を有しており、このCCD7の受光面には、超広角レンズ6によって集光された光が結合されるようになっている。
【0026】
CCD7は、受光面に結合された光を撮影映像のデータであるRAWデータ(生データ)に光電変換してカメラ2のさらに内部に出力するようになっている。
【0027】
CCD7の出力側には、AFE(Analog Front End)9が接続されており、このAFE9には、CCD7から出力されたRAWデータが入力されるようになっている。
【0028】
AFE9は、CDS(Cor-related Double Sampling)回路10と、このCDS回路10の後段に接続されたAGC(Auto Gain Control)回路11と、このAGC回路11の後段に接続されたA−Dコンバータ(A/D)12と、TG(Timing Generator)14とを有している。
【0029】
CDS回路10は、CCD7から入力されたRAWデータに対してノイズを除去する処理を行い、処理後のRAWデータをAGC回路11に出力するようになっている。
【0030】
AGC回路11は、後段のA/D12がRAWデータをA−D変換する際の入力ゲインを、所定の露出に応じた値に制御することによって、カメラ2の自動露出を行うようになっている。
【0031】
A/D12は、AGC回路11による入力ゲインの制御の下でRAWデータをA−D変換してAFE9から出力するようになっている。
【0032】
TG14は、CCD7における水平CCDを駆動するようになっている。
【0033】
TG14とCCD7との間には、V−Driver17が接続されており、このV−Driver17は、TG14の出力電圧の電圧レベルを変換し、変換後の電圧を用いることによって、CCD7における垂直CCDを駆動するようになっている。
【0034】
AFE9には、DSP(Digital Signal Processor)15が接続されており、このDSP15には、A/D12から出力されたA−D変換後のRAWデータが入力されるようになっている。
【0035】
DSP15は、入力されたRAWデータに対して信号の加工や補正(γ補正等)を行うことによって、RAWデータをYUV信号に変換して出力するようになっている。なお、この処理は、カメラ2からのデータの出力モードが、後述する通常出力モードに維持されまたは切り替えられている場合に行われることになる。
【0036】
DSP15の出力側には、ビデオエンコーダ16が接続されており、このビデオエンコーダ16には、DSP15から出力されたYUV信号が入力されるようになっている。
【0037】
そして、ビデオエンコーダ16は、入力されたYUV信号をD−A変換によってNTSC(National Television Standards Committee)信号に変換してECU3側に出力するようになっている。
【0038】
このようにして、カメラ2による撮影映像のデータが、NTSC信号としてカメラ2から出力された後に、映像ライン5を介してECU3に入力されるようになっている。
【0039】
そして、本実施形態において、DSP15には、像高特性情報保持手段としての像高特性メモリ18が接続されており、この像高特性メモリ18には、カメラ2における超広角レンズ6の像高特性を示す像高特性情報が記憶されて保持されている。像高特性情報の一例としては、例えば、K1=147.393093、K2=13.856319、K3=-36.794166、K4=56.929522、K5=-19.650417(各Kは、像高特性を表す)、CCD7の受光面の中心を原点とした二次元座標系(XY座標系)におけるレンズの中心位置のX座標cx=317.951558、および、当該二次元座標系におけるレンズの中心位置のY座標cy=237.498172等を挙げることができる。
【0040】
さらに、本実施形態において、DSP15は、出力モード切替手段として機能するようになっている。
【0041】
すなわち、DSP15は、A/D12側から入力されたRAWデータが、通常の撮影環境において撮影された撮影映像のデータであるか否かを判定する映像判定を行うようになっている。なお、この映像判定の判定基準としては、種々の基準を設けるようにしてもよく、例えば、映像全体が単一色を帯びている場合には、通常の撮影環境において撮影された撮影映像のデータではないと判定するようなものであってもよい。
【0042】
そして、この映像判定の結果、A/D12側から入力されたRAWデータが、通常の撮影環境において撮影された撮影映像のデータである場合には、DSP15は、カメラ2からのデータ(情報)の出力モードを、図2に示すようなカメラ2による撮影映像のデータを出力するための通常出力モードに維持するか、または、後述する像高特性出力モードから当該通常出力モードへと切り替えるようになっている。
【0043】
この通常出力モードにおいて、DSP15は、A/D12側から入力されたRAWデータを、前述のようにYUV信号に変換して出力するようになっている。一方、映像判定の結果、A/D12側から入力されたRAWデータが、通常の撮影環境において撮影された撮影映像のデータではない場合、すなわち通常の撮影環境において撮影されない撮影映像のデータである場合には、DSP15は、カメラ2からのデータの出力モードを、像高特性出力モードに維持するか、または、通常出力モードから当該像高特性出力モードへと切り替えるようになっている。
【0044】
この像高特性出力モードにおいて、DSP15は、A/D12側から入力されたRAWデータを出力することはせず、代りに、像高特性メモリ18に保持された像高特性情報を読み出すようになっている。
【0045】
そして、DSP15は、像高特性メモリ18から読み出された像高特性情報を、この像高特性情報を映像として示す像高特性曲線の映像(以下、像高特性曲線映像と称する)に変換(映像化)し、この像高特性曲線映像のデータを出力するようになっている。
【0046】
なお、図3に示すように、像高特性曲線映像は、CCD7の受光面上の結像点に結像された光が光軸との間になす角度である入射角度θ〔deg〕(図3における横軸)と、CCD7の受光面における中心点からの当該結像点までの距離h〔ピクセル〕との相関関係を示す曲線として知られている。
【0047】
このDSP15から出力された像高特性曲線映像のデータは、ビデオエンコーダ16によってNTSC信号に変換された上でカメラ2から出力され、その後、映像ライン5を介してECU3に入力されるようになっている。
【0048】
次に、ECU3について詳述すると、このECU3は、A−Dコンバータ(A/D)20を有しており、このA/D20には、カメラ2から出力されたデータが入力されるようになっている。そして、A/D20は、入力されたデータを、A−D変換してECU3のさらに内部に出力するようになっている。
【0049】
A/D20には、マイコン21が接続されており、このマイコン21には、A/D20から出力されたデータが入力されるようになっている。
【0050】
マイコン21は、メモリ23を有しており、このメモリ23には、カメラ2の内部パラメータの計算式が記憶されている。この計算式は、例えば、カメラ2の内部パラメータとして、CCD7の受光面上にとられた前述したレンズの中心位置(cx,cy)を原点(r=0,φ=0)とみなした二次元極座標〔r,φ〕における原点(r=0,φ=0)から光の結像点までの距離rを求める計算式として、次式の情報が記憶されている。
【0051】
r=K1×φ+K2×φ2+K3×φ3+K4×φ4+K5×φ5
【0052】
ただし、K1〜K5は、前述した像高特性である。また、φは、前述した二次元極座標における光の結像点の角度である。
【0053】
CPU22は、A/D20側から入力されたデータが、像高特性曲線映像のデータである場合には、メモリ23からカメラ2の内部パラメータの計算式を読み出し、読み出された計算式に、像高特性曲線映像から抽出された像高特性情報を代入することによって、カメラ2の内部パラメータを算出するようになっている。
【0054】
一方、CPU22は、A/D20側から入力されたデータが、カメラ2による撮影映像のデータである場合には、内部パラメータの算出は行わないようになっている。
【0055】
したがって、本実施形態においては、映像ライン5を介して入力された像高特性曲線映像のデータに基づいて、カメラ2の内部パラメータを取得することができるようになっている。
【0056】
次に、前述したカメラパラメータ取得装置1を適用した本発明に係るカメラパラメータ取得方法の実施形態について説明する。
【0057】
なお、便宜上、初期状態においては、DSP15により、カメラ2からのデータの出力モードが、通常出力モードに維持されているものとする。また、カメラ2は、車両に取り付けられ、ECU3に接続された直後の状態とされており、カメラ2による車両の周辺の撮影は未だに行われていないものとする。
【0058】
そして、初期状態から、カメラ2の内部パラメータの取得を開始すると、まず、カメラ2に、通常の撮影環境では撮影されない映像を撮影させる。このような映像を撮影させる方法の一例としては、例えば、カメラ2を真っ赤なケースで囲むことによって、映像全体が赤みを帯びた撮影映像を撮影させるようにしてもよい。
【0059】
カメラ2による撮影映像は、CCD7から、CDS回路10、AGC回路11およびA/D12を順次経た後に、RAWデータとしてDSP15に入力される。
【0060】
次いで、DSP15により、入力されたRAWデータに対する映像判定を行い、このRAWデータが、通常の撮影環境において撮影された撮影映像のデータではない旨の判定を行う。
【0061】
次いで、DSP15により、カメラ2からのデータの出力モードを通常出力モードから像高特性出力モードへと切り替える。
【0062】
そして、像高特性出力モードにおいて、DSP15により、像高特性メモリ18から像高特性情報を読み出すとともに、読み出された像高特性情報を、像高特性曲線映像に変換して出力する。
【0063】
次いで、DSP15から出力された像高特性曲線映像のデータを、ビデオエンコーダ16によってNTSC信号に変換した上でカメラ2から出力し、出力された像高特性曲線映像のデータを、映像ライン5を介してECU3に入力する。
【0064】
次いで、ECU3に入力された像高特性曲線映像のデータを、ECU3におけるA/D20によってデジタル信号に変換し、変換されたデータを、ECU3におけるマイコン21に入力する。
【0065】
次いで、マイコン21におけるCPU22により、マイコン21に入力されたデータが、像高特性曲線映像のデータである旨の判定を行う。
【0066】
次いで、CPU22により、入力された像高特性曲線映像のデータから像高特性情報を抽出するとともに、メモリ23から、カメラ2の内部パラメータの計算式を読み出す。
【0067】
そして、CPU22により、メモリ23から読み出された計算式に、前記抽出された像高特性情報を当てはめることにより、カメラ2の内部パラメータを算出することができる。
【0068】
以上述べたように、本実施形態によれば、ECU3により、映像ライン5を介してカメラ2から取得された像高特性曲線映像に基づいてカメラ2の内部パラメータを算出して取得することができる。これにより、カメラ2の取り付け位置に応じて配線数が制限され、制御ラインを設けることができない場合であっても、カメラ2の内部パラメータを確実に取得することができ、ひいては、カメラ2による撮影映像を利用した良好な車両周辺監視画像の表示を実現することができる。
【0069】
なお、本発明は、前述した実施形態に限定されるものではなく、必要に応じて種々の変更が可能である。
【0070】
例えば、CPU22に、算出されたカメラ2の内部パラメータを用いて車両周辺監視画像を生成するためのマッピングテーブルを補正する機能や、マッピングテーブルを用いてカメラ2による撮影映像を変換して車両周辺監視画像を生成する機能を持たせてもよいことは勿論である。この場合には、たとえば、マイコン21のメモリ23内にマッピングテーブルを格納しておけばよい。
【0071】
また、本発明は、トップビュー画像の生成のために複数台のカメラを備えた車両周辺監視装置に適用することができることは勿論である。
【0072】
さらに、本発明は、システム本体(例えばECU)側においてカメラの内部パラメータを取得することが前提となるカメラによる撮影映像に基づく画像の表示を行うシステムであれば、前述した車両周辺監視装置以外のシステムに適用するようにしてもよい。
【図面の簡単な説明】
【0073】
【図1】本発明に係るカメラパラメータ取得装置の実施形態を示すブロック図
【図2】本発明に係るカメラパラメータ取得装置の実施形態において、通常出力モードにおいて出力されるカメラによる撮影映像の一例を示す図
【図3】本発明に係るカメラパラメータ取得装置の実施形態において、像高特性出力モードにおいて出力される像高特性曲線映像の一例を示す図
【符号の説明】
【0074】
1 カメラパラメータ取得装置
2 カメラ
3 ECU
5 映像ライン
6 超広角レンズ
15 DSP
18 像高特性メモリ
【特許請求の範囲】
【請求項1】
カメラの内部パラメータを取得するためのカメラパラメータ取得装置であって、
前記カメラに配設され、前記カメラにおけるレンズの像高特性を示す像高特性情報を保持する像高特性情報保持手段と、
前記カメラに配設され、前記カメラからの情報の出力モードを、前記カメラによる撮影映像を出力するための通常出力モードと、前記像高特性情報保持手段によって保持された前記像高特性情報を映像化した像高特性曲線映像を出力するための像高特性出力モードとの間で切り替える出力モード切り替え手段と、
前記カメラに映像ラインを介して接続され、前記通常出力モードにおいて前記カメラから出力された撮影映像または前記像高特性出力モードにおいて前記カメラから出力された前記像高特性曲線映像が、前記映像ラインを介して入力されるように形成され、前記像高特性曲線映像が入力された場合に、入力された前記像高特性曲線映像に基づいて前記カメラの内部パラメータを算出するように形成されたパラメータ算出手段と
を備えたことを特徴とするカメラパラメータ取得装置。
【請求項2】
前記出力モード切り替え手段が、前記カメラによって通常の撮影環境では撮影されない映像が撮影されたことを契機として、前記出力モードを前記通常出力モードから前記像高特性出力モードへと切り替えるように形成されていること
を特徴とする請求項1に記載のカメラパラメータ取得装置。
【請求項3】
前記カメラが、車両に取り付けられたカメラとされ、
前記カメラにおけるレンズが、超広角レンズとされていること
を特徴とする請求項1または請求項2に記載のカメラパラメータ取得装置。
【請求項4】
カメラの内部パラメータを取得するためのカメラパラメータ取得方法であって、
前記カメラ内に、前記カメラにおけるレンズの像高特性を示す像高特性情報を保持しておき、
前記カメラに、通常の撮影環境では撮影されない映像を撮影させ、この撮影を契機として、前記カメラからの情報の出力モードを、前記カメラによる撮影映像を出力するための通常出力モードから、前記像高特性情報を映像化した像高特性曲線映像を出力するための像高特性出力モードへと切り替えさせ、
前記像高特性出力モードにおいて前記カメラから出力された前記像高特性曲線映像を映像ラインを介して取得し、取得された前記像高特性曲線映像に基づいて前記カメラの内部パラメータを算出して取得すること
を特徴とするカメラパラメータ取得方法。
【請求項5】
前記カメラを、車両に取り付け、
前記カメラにおけるレンズとして、超広角レンズを用いること
を特徴とする請求項4に記載のカメラパラメータ取得方法。
【請求項1】
カメラの内部パラメータを取得するためのカメラパラメータ取得装置であって、
前記カメラに配設され、前記カメラにおけるレンズの像高特性を示す像高特性情報を保持する像高特性情報保持手段と、
前記カメラに配設され、前記カメラからの情報の出力モードを、前記カメラによる撮影映像を出力するための通常出力モードと、前記像高特性情報保持手段によって保持された前記像高特性情報を映像化した像高特性曲線映像を出力するための像高特性出力モードとの間で切り替える出力モード切り替え手段と、
前記カメラに映像ラインを介して接続され、前記通常出力モードにおいて前記カメラから出力された撮影映像または前記像高特性出力モードにおいて前記カメラから出力された前記像高特性曲線映像が、前記映像ラインを介して入力されるように形成され、前記像高特性曲線映像が入力された場合に、入力された前記像高特性曲線映像に基づいて前記カメラの内部パラメータを算出するように形成されたパラメータ算出手段と
を備えたことを特徴とするカメラパラメータ取得装置。
【請求項2】
前記出力モード切り替え手段が、前記カメラによって通常の撮影環境では撮影されない映像が撮影されたことを契機として、前記出力モードを前記通常出力モードから前記像高特性出力モードへと切り替えるように形成されていること
を特徴とする請求項1に記載のカメラパラメータ取得装置。
【請求項3】
前記カメラが、車両に取り付けられたカメラとされ、
前記カメラにおけるレンズが、超広角レンズとされていること
を特徴とする請求項1または請求項2に記載のカメラパラメータ取得装置。
【請求項4】
カメラの内部パラメータを取得するためのカメラパラメータ取得方法であって、
前記カメラ内に、前記カメラにおけるレンズの像高特性を示す像高特性情報を保持しておき、
前記カメラに、通常の撮影環境では撮影されない映像を撮影させ、この撮影を契機として、前記カメラからの情報の出力モードを、前記カメラによる撮影映像を出力するための通常出力モードから、前記像高特性情報を映像化した像高特性曲線映像を出力するための像高特性出力モードへと切り替えさせ、
前記像高特性出力モードにおいて前記カメラから出力された前記像高特性曲線映像を映像ラインを介して取得し、取得された前記像高特性曲線映像に基づいて前記カメラの内部パラメータを算出して取得すること
を特徴とするカメラパラメータ取得方法。
【請求項5】
前記カメラを、車両に取り付け、
前記カメラにおけるレンズとして、超広角レンズを用いること
を特徴とする請求項4に記載のカメラパラメータ取得方法。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2008−177988(P2008−177988A)
【公開日】平成20年7月31日(2008.7.31)
【国際特許分類】
【出願番号】特願2007−11273(P2007−11273)
【出願日】平成19年1月22日(2007.1.22)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成20年7月31日(2008.7.31)
【国際特許分類】
【出願日】平成19年1月22日(2007.1.22)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]