
カメラ撮影画像表示装置
【課題】車外を撮影するカメラの画像をモニタに表示するに際して、カメラの撮影画像の表示と非表示が頻繁に切り換わることがないようにし、しかも車両が走行する道路の属性に応じて適切な表示と非表示がなされると共に、車両の走行環境等によっても適切な表示と非表示を行う「カメラ撮影画像表示装置」とする。
【解決手段】走行する道路の属性に対応してカメラ画像の表示標準閾値と非表示標準閾値を設定し、車両が走行する道路形状等の走行環境に対応して、表示標準閾値と非表示標準閾値とを調整するための調整値を設定して、これらの値により表示作動閾値と非表示作動閾値とを設定する。車速が非表示作動閾値よりも低い状態から高くなったときカメラの画像の表示を非表示とし、作動閾値よりも高い状態から低くなったとき、カメラの撮影画像を表示することにより、各閾値間にヒステリシス域を設けて頻繁な表示切り換えを防ぐ。
【解決手段】走行する道路の属性に対応してカメラ画像の表示標準閾値と非表示標準閾値を設定し、車両が走行する道路形状等の走行環境に対応して、表示標準閾値と非表示標準閾値とを調整するための調整値を設定して、これらの値により表示作動閾値と非表示作動閾値とを設定する。車速が非表示作動閾値よりも低い状態から高くなったときカメラの画像の表示を非表示とし、作動閾値よりも高い状態から低くなったとき、カメラの撮影画像を表示することにより、各閾値間にヒステリシス域を設けて頻繁な表示切り換えを防ぐ。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は車両に搭載したフロントカメラ等の車外撮影カメラの画像を、通常はナビゲーション用表示等を行っているモニタに割り込み表示を行うための、カメラ撮影画像表示装置に関する。
【背景技術】
【0002】
近年はデジタルカメラやデジタルビデオカメラが安価になり、車両にも各種のカメラが取り付けられるようになっている。即ち、車両の運転に際しては、運転者は特に車両の後方を見ることが困難のため、従来より車両の後部下方を撮影するカメラを設け、そのカメラの撮影映像をモニタに表示することができるようにし、車両の後退時にはモニタにそのカメラの撮影映像を表示することが行われている。
【0003】
このような車両の周囲を撮影するカメラについては、前記のような後方を撮影するカメラのほか、車両が前進するときでも、左右の見通しの悪い交差点に入るとき、或いは左右が見にくい車庫から道路に出るときには、運転者が実際に左右の状態を確認できるまで車両の先端が1m程度は前進しなければならないことが多いため、その前進の過程で他の車両や自転車、歩行者等に接触し、或いは通行の妨害をすることを防止できるように、例えば車両の先端両側部にそれぞれの側方を撮影するカメラを設け、モニタの表示画面を左右に分割して、それぞれのカメラの画像を表示することも行われている。
【0004】
更に近年は前方を撮影するカメラを設け、必要に応じてソナーや小型レーダーと共に用い、撮影画像等を解析することにより前方を走行する車両に追突しないように、また追従して自動走行できるようにする技術が開発され、そのためにも車両の前方を撮影するカメラを搭載するようになっている。
【0005】
また近年は車両の前方、後方、両側方を撮影するカメラを搭載し、これらのカメラの撮影画像を処理してあたかも車両の上方に配置した1つのカメラで車両の周囲を撮影したものと同様の画像をモニタに表示する技術も実用化されている。このように車両に搭載した種々のカメラによって車両の周囲を撮影し、これをモニタに表示して車両の運転を支援する車両運転支援装置が開発され、また研究がなされている。このようなカメラのシステムでも、設置した複数のカメラを単独で、或いは複数用いてそれぞれのカメラの撮影画像も表示することができるようにしたマルチビューシステムも開発されている。
【0006】
上記のように車両には種々のカメラが取り付けられるようになっており、その中でも前記のような車両前方、或いは車両前方における両側方を主として撮影するカメラについては、当然車両が前進するときに、モニタにカメラの撮影画像を表示することとなるが、このカメラの撮影画像の利用態様からみると、車両が注意深く前進するときであり、したがってほとんどの場合は低速走行の時に使用され、ある程度高速になったときにはこれを使用する必要はなくなる。その時にはモニタにナビゲーション装置の地図画面が表示されているときには、カメラの撮影画像の表示を止めたとき、自動的にナビゲーション装置の画面表示に切り換わるようにしている。
【0007】
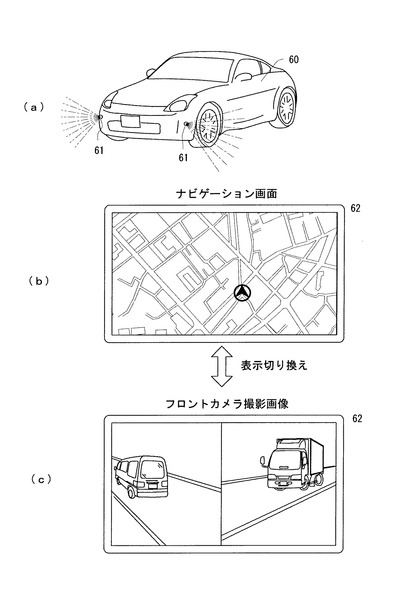
この状態を図6に示しており、同図(a)に示すような車両60の前方部分に主として車両の前方側部を撮影するフロントカメラ61左右にそれぞれ設けており、通常は同図(b)に示すようにナビゲーション画面が表示されているときでも、フロントカメラの撮影画像を表示したいと思ったときには、手動操作等により同図(c)に示すような両カメラの撮影画像をモニタ62の表示部を半分に分け、それぞれに左右のカメラの撮影画像を表示している。
【0008】
上記のようなフロントカメラの撮影画像の表示は、利用者がもう必要ではないと思ったとき操作ボタン等を操作して表示を止めることが行われる。それに対して、利用者の手を煩わせることなく、自動的に表示を止める技術として、例えば特許文献1に開示されているように、所定速度以上になったときは自動的に表示を止める技術が存在する。また、車両減速時の加速度を検知し、この減速加速度と、所定速度に減速されるまでの時間とによって車両の停止時期を予測し、この予測に対応してカメラ撮影画像表示を行う作動時間を決定し、急激な減速時には早めに、ゆっくりとした減速時には遅めに画像表示する技術は特許文献2に開示されている。
【0009】
更に、車速が所定の速度以下で、且つ、車両が渋滞車列の中にないと判定された場合にカメラ撮影画像を表示する技術は特許文献3に開示されている。なおこの文献には、渋滞車列の中にない場合でも、道路種別が高速道路、自動車専用道路または山岳道路である場合は、所定速度以下になってもモニタに画像を表示しないようにし、また、渋滞車列の中にある場合でも、見通しの悪い交差点であると判定された場合は、車速が所定速度以下になると画像を表示する技術も開示されている。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平5−268607号公報
【特許文献2】特開平11−212001公報
【特許文献3】特開2007−127491号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
前記のように、図6(c)のようなフロントカメラの撮影画像は、車両が低速であるときのみ必要とするため、前記特許文献1に開示されている技術では、車両が所定の閾値の速度(V)以上になったとき、フロントカメラの撮影画像の表示を行わない技術が開示されているが、この技術では車両が再び前記所定の閾値の速度(V)以下になったときフロントカメラの撮影画像の表示を行うため、車両がこの所定の閾値の速度近傍でしばらく走行するとき、モニタの画面はフロントカメラの撮影画像とナビゲーション画面とが頻繁に切り換わり、見にくい画面表示とならざるを得ない。特にナビゲーション画面を見たいとき、頻繁にフロントカメラの撮影画像の表示と切り換わって、ナビゲーション画面を見ることができなくなる。
【0012】
また、フロントカメラ撮影画像の表示のオンオフは所定の閾値の車速であるため、例えば高速道路走行時と一般道路走行時とで同じ閾値の速度であり、更には国道のような広い道路と、細街路のような細くて左右からの飛び出し等が起こりやすい道路とが同じ閾値の速度となっているため適切ではない。
【0013】
更に前記特許文献2に開示された技術では車両の減速時の加速度を検出して、その加速度のデータを利用してカメラ撮影画像の表示非表示を行う方式では、フロンとカメラの撮影画像を表示するタイミングとしては適切ではない場合が多く、車両走行の実態には必ずしも適合していない。
【0014】
また、前記特許文献3に開示された技術のように、渋滞の状態や、走行する道路の属性、更には見通しの悪い交差点等を検出してフロントカメラの撮影画像の表示非表示を設定する技術では、やはり前記特許文献1に開示された技術と同様に、頻繁にフロントカメラの撮影画像の表示とナビゲーション画面等が切り換わる問題を生じる。
【0015】
したがって本発明は、車外を撮影するカメラの画像をモニタに表示するに際して、カメラの撮影画像の表示と非表示が頻繁に切り換わることがないようにし、しかも車両が走行する道路の属性に応じて適切な表示と非表示がなされると共に、車両の走行環境等によっても適切な表示と非表示を行うことができるようにしたカメラ撮影画像表示装置を提供することを主たる目的とする。
【課題を解決するための手段】
【0016】
本発明に係るカメラ撮影画像表示装置は、前記課題を解決するため、 走行する道路の属性を検出する走行道路属性検出手段と、走行道路属性に対応して、カメラ撮影画像の表示標準閾値と非表示標準閾値を設定するカメラ撮影画像表示非表示標準閾値設定手段と、前記表示標準閾値及び非表示標準閾値によって、実際にカメラ撮影画像を表示作動するための表示作動閾値と、カメラ撮影画像を非表示作動するための非表示作動閾値とを設定するカメラ撮影画像表示非表示作動閾値設定手段と、前記非表示作動閾値と、現在の車速を検出する車速検出手段から取り込んだ現在の車速とを比較し、現在の車速が非表示作動閾値よりも低い状態から高くなったとき、カメラの撮影画像の表示を非表示とする指示を行うカメラ撮影画像非表示指示手段と、前記表示作動閾値と、前記現在の車速とを比較し、現在の車速が表示作動閾値よりも高い状態から低くなったとき、カメラの撮影画像を表示するカメラ撮影画像表示指示手段とを備えたことを特徴とする。
【0017】
また、本発明に係る他のカメラ撮影画像表示装置は、前記カメラ撮影画像表示装置において、車両の走行環境を検出する走行環境検出手段と、走行環境に対応して、前記表示標準閾値と非表示標準閾値とを調整するための、表示閾値調整値及び非表示閾値調整値を設定するカメラ撮影画像表示非表示閾値調整値設定手段とを備え、前記カメラ撮影画像表示非表示作動閾値設定手段は、前記表示標準閾値及び非表示標準閾値と、前記表示閾値調整値及び非表示閾値調整値とによって、実際にカメラ撮影画像を表示作動するための表示作動閾値と、カメラ撮影画像を非表示作動するための非表示作動閾値とを設定することを特徴とする。
【0018】
また、本発明に係る他のカメラ撮影画像表示装置は、前記カメラ撮影画像表示装置において、前記走行環境の検出に際しては、前方にカーブが存在することを検出する前方カーブ検出、前方に交差点が存在することを検出する前方交差点検出、走行中の道路の前方は駐車場に進入することを検出する前方駐車場進入検出、高速道路走行中において前方に道路交差が存在することを検出する前方道路交差検出、前方に事故多発地点が存在することを検出する前方事故多発地点検出、前方にナビゲーション装置による誘導経路案内地点が存在することを検出する前方ナビゲーション案内地点検出、現在道路が渋滞していることを検出する渋滞検出、のいずれかの検出、或いはこれらの検出の組み合わせにより走行環境を検出し、前記表示作動閾値または非表示作動閾値を変化することを特徴とする。
【0019】
また、本発明に係る他のカメラ撮影画像表示装置は、前記カメラ撮影画像表示装置において、前記表示作動閾値及び非表示作動閾値を、前記走行道路の属性に応じた標準閾値に対して、前記閾値調整値を加減算することにより、または前記閾値調整値を標準閾値に対して係数として乗ずることにより、或いは前記加減算または係数を乗じた値を予め計算したデータを記録しておき、これを現在の走行環境に対応して読み込むことにより求めることを特徴とする請求項2記載のカメラ撮影画像表示装置。
【0020】
また、本発明に係る他のカメラ撮影画像表示装置は、前記カメラ撮影画像表示装置において、前記走行環境の検出を、車両外部と通信を行う外部情報取込部の情報を用いて行うことを特徴とする請求項2記載のカメラ撮影画像表示装置。
【0021】
また、本発明に係る他のカメラ撮影画像表示装置は、前記カメラ撮影画像表示装置において、前記非表示作動閾値を表示作動閾値よりも高い車速に設定し、前記非表示作動閾値と表示作動閾値との間をヒステリシス域に設定したことを特徴とする請求項1記載のカメラ撮影画像表示装置。
【0022】
また、本発明に係る他のカメラ撮影画像表示装置は、前記カメラ撮影画像表示装置において、前記表示作動閾値または非表示作動閾値を、運転者の特性によって任意に変化させることを特徴とする請求項1記載のカメラ撮影画像表示装置。
【0023】
また、本発明に係る他のカメラ撮影画像表示装置は、前記カメラ撮影画像表示装置において、前記カメラの撮影画像表示時には、利用者が非表示にする指示を検出する利用者非表示指示検出、カメラ撮影画像表示後所定時間が経過したことを検出する表示後所定時間経過検出、車両停車後所定時間が経過したことを検出する停車後所定時間経過検出、エンジンをOFFしてから所定時間が経過したことを検出するエンジンOFF後所定時間経過検出、現在走行している道路が渋滞していることを検出する渋滞検出、のいずれかの検出時にカメラ撮影画像を非表示にすることを特徴とする。
【発明の効果】
【0024】
本発明は上記のように構成したので、車外を撮影するカメラの画像をモニタに表示するに際して、カメラの撮影画像の表示と非表示が頻繁に切り換わることがないようにし、しかも車両が走行する道路の属性に応じて適切な表示と非表示がなされると共に、車両の走行環境等によっても適切な表示と非表示を行うことができるようになる。
【図面の簡単な説明】
【0025】
【図1】本発明の実施例の機能ブロック図である。
【図2】同実施例の作動フロー図である。
【図3】図2の作動フローの続きの作動フロー図である。
【図4】道路リンクを用いた走行環境検出の各種態様を示す図である。
【図5】本発明の作動閾値の設定過程、及び作動例を示す図である。
【図6】フロントカメラを用いた撮影画像と、ナビゲーション画面との切り換え状態を示す図である。
【発明を実施するための形態】
【実施例】
【0026】
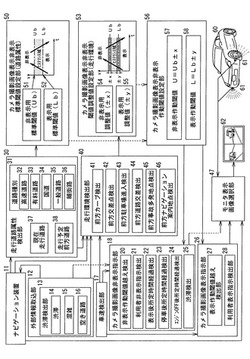
本発明の実施例を図面に沿って説明する。図1は本発明の実施例の機能ブロック図であり、同図には本発明を各種の態様で実施できるようにした例を示しており、したがって本発明においてはこれらの各種機能部の内任意のものを選択して実施することができるようにしている。なお、同図に示す各機能部は、それぞれ各機能を行う手段と言うこともできる。
【0027】
最初に図1の機能ブロック図の全体概要を説明する。図1に示す例においては、ナビゲーション装置11の画面表示用データはモニタ表示画像選択部47で、車両60のフロントカメラ61の撮影画像と任意に切り換えて表示することができるようにしており、モニタ表示画像選択部47では後述するように、カメラ撮影画像非表示指示部18と、カメラ撮影画像表示指示部26の指示によって、モニタ62へのカメラ撮影画像の表示を切り換えるようにしている。
【0028】
また、カメラ撮影画像非表示指示部18とカメラ撮影画像表示指示部26は、カメラ撮影画像表示非表示作動閾値設定部56で設定した作動閾値と、車速検出部17で検出した車両60の車速と比較し、カメラ撮影画像表示と非表示の指示を行っている。また、カメラ撮影画像表示非表示作動閾値設定部56では、カメラ撮影画像表示非表示標準閾値設定部50で設定した、走行道路属性検出部30で検出した現在走行している道路の属性に対応した標準閾値と、更にカメラ撮影画像表示非表示閾値調整値設定部53で設定した、走行環境検出部40で検出した各種車両の走行環境に対応した閾値調整値とによって、カメラ撮影画像の表示非表示の作動を行う閾値を求めている。
【0029】
前記走行道路属性検出部30は、ナビゲーション装置11で検出した現在地と、現在走行している道路のリンク、更にはこれから走行する道路のリンクによって得られる道路の属性データによって、走行道路の属性を検出している。また、前記走行環境検出部36では、ナビゲーション装置により得られる現在走行している道路や車両の環境を検出し、外部情報取込部12で取り込んだ渋滞情報等の情報を利用し、更には現在の車速を車速検出部17から取り込んで、現在の車両の各種走行環境を検出するようにしている。
【0030】
これらの機能部を以下に順に説明する。ナビゲーション装置11は現在広く用いられているナビゲーション装置が使用でき、地図を描画するための地図データ及び施設等を検索するための施設情報データを記録したCD−ROM、DVD−ROM、ハードディスク等の地図・情報データ記憶媒体と、この地図・情報データ記憶媒体のデータを取り込むデータ取込装置と、地図等を表示するモニタと、GPS受信機及び走行距離センサやジャイロ等を用いた自立航法装置を用い、車両の現在位置及び進行方向の方位を検出する車両位置検出装置を有し、車両の現在位置を含む地図データを地図・情報データ記憶媒体から取り込み、この地図データに基づいて車両位置の周囲の地図画像をモニタの画面に描画すると共に、車両位置マークをモニタ画面に重ね合わせて表示し、車両の移動に応じて地図画像をスクロール表示し、或いは地図画像を画面に固定し車両位置マークを移動させ、車両が現在どこを走行しているのかを一目でわかるようにしている。
【0031】
CD−ROMやDVD−ROM、或いはハードディスク等の地図・情報データ記憶媒体に記憶されている地図データは、各種の縮尺レベルに応じて適当な大きさの経度幅及び緯度幅に区切られており、道路等は経度及び緯度で表現されたノードの座標集合として記憶されている。道路は2以上のノードの連結からなり、地図データは、道路リスト、ノードテーブル及び交差点構成ノードリスト等からなる道路レイヤ、及び地図画面上に道路、建築物、施設、公園及び河川等を表示するための背景レイヤ等の地図データと、市町村名などの行政区画名、道路名、交差点名及び施設の名前等の、文字や地図記号等を表示するための情報データなどから構成される。
【0032】
また、このナビゲーション装置においては、利用者が所望の目的地或いは経由地(以下「目的地」と称する)に向けて道路を間違うことなく容易に走行できるようにするための経路誘導機能を備えている。この経路誘導機能によれば、種々の手段により目的地を設定し、出発地から目的地まで、これらの地点を結ぶ経路の内各種の条件を加味して適切な経路を演算して提示するようになっている。また、利用者が選択した経路を誘導経路として記憶しておき、走行中、地図画像上に誘導経路を他の経路とは色を変えて太く描画して画面表示したり、車両が誘導経路上の進路を変更すべき交差点に一定距離以内に近づいたときに、交差点を拡大表示し、進路を変更すべき方向を示す矢印等を描画して画面表示したり、音声で右左折の誘導を行うことで、利用者を目的地まで案内することができるようにしている。
【0033】
図1に示すナビゲーション装置11においては、前記のような従来のナビゲーション装置が備えている機能を利用し、そこで作成されるデータを特に走行道路属性検出部30、走行環境検出部40に出力して利用可能としている。また、ナビゲーション装置11で作成する出力画面には、地図画面に自車位置マークを重ねて表示するほか、誘導経路や渋滞情報、更には右左折交差点の案内表示等を行うことができるようにしている。
【0034】
外部情報取込部12においては、VICS、或いは携帯電話等を利用して外部の各種情報提供機関と接続し、特に渋滞検出部13において、渋滞14、混雑15、現在走行している道路は混雑もしていない空き道路16であること等を検出する。なお、この外部情報取込部12では、このほか車両走行方向の事故情報や道路工事情報、道路近接火事情報等も取り込むようにしても良い。この外部情報取込部12は前記のように独立した機能部として存在しうるが、ナビゲーション装置11の一機能部として存在していても良い。その際にはこれらの外部情報はナビゲーション装置11から取り込むことができるようになる。
【0035】
車速検出部17では車両60の現在の走行速度を検出しており、その検出データは走行環境検出部40に出力して、車両の現在の走行環境データとして用い、更にカメラ撮影画像非表示指示部18、及びカメラ撮影画像表示指示部26に出力して、前記のようにカメラ撮影画像表示非表示作動閾値設定部56で設定した車速に閾値と比較できるようにしている。
【0036】
走行道路属性検出部30においては、特にナビゲーション装置11から取り込んだ現在走行道路37、或いはこれから走行する道路としての走行予定前方道路について、道路種別31を検出している。道路種別31としては、図示の例では高速道路32、有料道路33、国道34、一般道路35、細街路36等を検出できるようにしている。この走行道路属性検出部30のデータは、カメラ撮影画像表示非表示標準閾値設定50に出力している。
【0037】
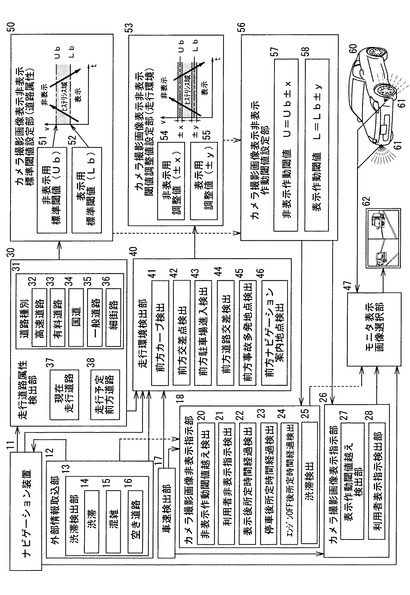
カメラ撮影画像表示非表示標準閾値設定部50では、図5(a)に拡大して示すように、同図の矢印Aのように車速(V)が時間(t)につれて上昇し、走行道路属性検出部30で検出した道路属性によって予め設定している、非表示用標準閾値(Ub)迄上昇したときにカメラ撮影画像を非表示にすることを標準として設定する。また同図の矢印Bに示すように、車速が前記のように非表示用標準閾値(Ub)よりも高い状態から時間につれて降下して、表示用標準閾値(Lb)よりも低下したとき、再び表示することを標準として設定する。
【0038】
したがって、同図のグラフに示すように、表示用標準閾値(Lb)と非表示用標準閾値(Ub)との間の速度部分は、制御の「ヒステリシス域」ということができ、この設定によって特定の速度の閾値で表示非表示の切り換え作動を行うときのような、頻繁な表示切り換えを防止することができる。なお、このようなヒステリシス特性を持たせて制御することによりハンチングを防止することは広く行われているが、本発明においては特にナビゲーション案内の画面を表示しているとき、頻繁なカメラ撮影画像の表示が自動的に行われることにより、運転者が安全に運転することができなくなる問題を、この手法を採用することによって解決することができる、という特有の効果を奏することとなる。
【0039】
図1におけるカメラ撮影画像表示非表示閾値調整値設定部53では、前記のように走行環境検出部40で検出した走行環境により、カメラ撮影画像表示非表示標準閾値設定部50で設定した標準閾値(Ub)(Lb)を調整し、より実態に適合した閾値を得ることができるようにしている。即ち、走行環境検出部40では例えば前方カーブ検出部41によって、車両の現在走行している道路の前方に所定以上急なカーブが存在することを検出する。
【0040】
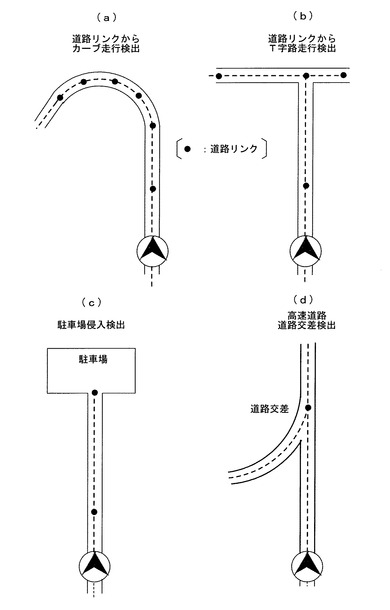
その際には例えば図4(a)に示すように、ナビゲーション装置によって現在走行している道路データである道路リンクについて、これと走行方向前方で接続する道路リンクを検出し、更にその先の道路リンクを順に検出することにより、各道路リンクの方位データの変化から、これから走行する道路は所定以上の急なカーブであることを検出することができる。
【0041】
また、前方交差点検出部42では、車両が現在走行している道路の前方に交差点が存在することを検出する。その際には例えば図4(b)に示すように、ナビゲーション装置によって前記のような道路リンクをたどることにより図中T字路で示す交差点が存在することを検出することができ、それによりこれから交差点を走行することを前もって検出することができる。
【0042】
前方駐車場進入検出部43では、現在走行している道路のすぐ先には駐車場が存在し、その駐車場に車両が進入しようとしていることを検出する。その際には例えば図4(c)に示すように、ナビゲーション装置によって前記のような道路リンクの先には駐車場が存在することを検出することによって実行することができる。
【0043】
前方道路交差検出部44では、現在車両が高速道路を走行しているとき、現在走行している道路の前方に他の高速道路等が交差する、道路交差が存在することを検出する。その際には例えば図4(d)に示すように、ナビゲーション装置によって前記のような道路リンクの先には他の道路が交差する道路交差が存在することを検出することによって実行できる。
【0044】
前方事故多発地点検出部45では、ナビゲーション装置が備えている地図データベースに予め道路地図に対応して事故多発地点のデータが記録されているとき、車両が現在その事故多発地点に近づいていることを検出することにより実施する。また、前方ナビゲーション案内地点検出部46では、ナビゲーション装置で誘導経路を設定し、例えば車両が現在誘導経路上での右左折交差点に近づいていることを検出したとき、前記のような前方交差点検出部42による検出を行う前でも、特に誘導経路上において右左折交差点に近づいていることを検出する。走行環境検出部40ではその外、料金所を検出する等の、更に種々の走行環境を検出するようにしても良い。走行環境検出部40では、現在走行している道路リンク部分に限らず、例えば現在地から100m程度先までについての走行環境を検出するようにしても良い。
【0045】
カメラ撮影画像表示非表示閾値調整値設定部53では、走行環境検出部40で検出したこれらの検出データ、或いはこれらの検出部の内任意に選択した検出部のデータを利用し、閾値の標準として設定した前記カメラ撮影画像標準閾値設定部50の閾値に対して、調整値を設定する。その際には図5(b)に示すように、非表示用標準閾値(Ub)に対して走行環境に応じた非表示用調整値(±x)を設定する。
【0046】
ここで+xに設定したときには、非表示用標準閾値(Ub)よりも閾値の速度を上昇させ、それによりカメラ撮影画像が表示状態から非表示状態に切り換えるとき、標準の閾値の速度よりも車速が上昇したときに非表示にすることとなる。逆に−xに設定したときには、非表示用標準閾値(Ub)よりも上記閾値の速度を下げ、それによりカメラ撮影画像が表示状態から非表示状態に切り換えるとき、標準の閾値の速度よりも速度が低いときに非表示にすることとなる。
【0047】
また、表示用調整値(Lb)に対しては、走行環境に応じて表示用調整値(±y)を設定する。ここで+yに設定したときには、表示用標準閾値(Lb)よりも閾値の速度を上昇させ、それによりカメラ撮影画像が非表示状態から表示状態に切り換える時、標準の閾値の速度よりも速度が速い状態で表示することとなる。それに対して−yに設定したときには、表示用標準閾値(Lb)よりも上記閾値の速度を下げ、それによりカメラ撮影画像が非表示の状態から表示状態に切り換えるとき、標準の閾値の速度よりも速度が低いときに表示することとなる。
【0048】
カメラ撮影画像表示非表示作動閾値設定部56では、カメラ撮影画像表示非表示標準閾値設定部50で設定した前記のような標準閾値(Ub)(Lb)のデータと、カメラ撮影画像表示非表示閾値調整値設定部53で設定した前記のような閾値調整値(±x)(±y)のデータを用い、モニタに表示するカメラ撮影画像の実際の非表示作動閾値(U)と、実際の表示作動閾値(L)とを設定する。ここで非表示作動閾値(U)は(U=Ub±x)であり、表示作動閾値(L)は(L=Lb±y)となる。
【0049】
この中で非表示作動閾値(U)については、カメラ撮影画像非表示指示部18に出力し、特にこの中の非表示作動閾値越え検出部20において、ここで入力したカメラ撮影画像非表示作動閾値(U)と車速検出部17で検出した車両の現在の速度とを比較し、現在の車速(V)が前記(U)を越えたことを検出する。その検出によってカメラ撮影画像非表示指示部18ではモニタ表示画像選択部47に信号を出力し、現在モニタに表示しているカメラ撮影画像から、図示の例ではナビゲーション装置11の画像を選択して表示する。なお、ここで必要ならばテレビ画面を選択して切り換えることもできる。
【0050】
図1に示すカメラ撮影画像非表示指示部18においては、前記非表示作動閾値越え検出部20の他、利用者非表示指示検出部21を備え、利用者が強制的にカメラ撮影画像を非表示にしたいと思ったとき、所定の操作ボタン、或いはタッチパネル部分を操作することによって非表示にすることができるようにしている。また、表示後所定時間経過検出部22では、ここで例えば10秒等に設定しておくことにより、カメラ撮影画像を表示した時からの経過時間を計測し、10秒が経過したときには強制的に非表示にすることができるようにしている。
【0051】
また、停車後所定時間経過検出部23では、車両が停止したときから例えば30秒等に設定しておくことにより、車両が停止したことを検出してからの経過時間を計測し、30秒が経過したときには強制的に非表示にすることができるようにしている。更にエンジンOFF後所定時間経過検出部24では、利用者がエンジンをOFFしたときからの経過時間を計測し、例えば10秒等の所定時間が経過したことを検出したとき、強制的に非表示とすることができる。また、渋滞検出部25においては、前記外部情報取込部12の渋滞検出部13で渋滞14を検出したときその信号を取り込んで、現在は渋滞であることにより所定以下の低速であっても、カメラの撮影画像を表示しないようにすることができるようにしている。
【0052】
したがってカメラ撮影画像非表示指示部18では、非表示作動閾値越え検出部20と、これ以外の各種の検出部の内で予め設定している任意の検出部の作動により、カメラ撮影画像非表示の指示をモニタ表示画像選択部47に出力し、カメラ撮影画像の表示を止め、例えばナビゲーション画面等に切り換える。
【0053】
カメラ撮影画像表示非表示作動閾値設定部56における表示作動閾値(L)については、カメラ撮影画像表示指示部26に出力し、特にこの中の表示作動閾値越え検出部27において、ここで入力したカメラ撮影画像表示作動閾値(L)と車速検出部17で検出した車両の現在の速度とを比較し、現在の車速(V)が前記表示作動閾値(L)を越えたことを検出する。この時の車速(V)が表示作動閾値(L)を越えたか否かの判別に際しては、車速(V)が表示作動閾値(L)より低下したことを検出することとなる。この検出によってカメラ撮影画像表示指示部26では、モニタ表示画像選択部47に信号を出力し、現在表示している例えばナビゲーション画面から、カメラ撮影画像の表示を選択して切り換える。
【0054】
図示するカメラ撮影画像表示指示部26には利用者表示指示検出部28を備え、利用者がカメラ撮影画像をモニタに表示させたいと思ったとき、前記表示作動とは関係なく、強制的にカメラ撮影画像をモニタに表示させることができるようにしている。
【0055】
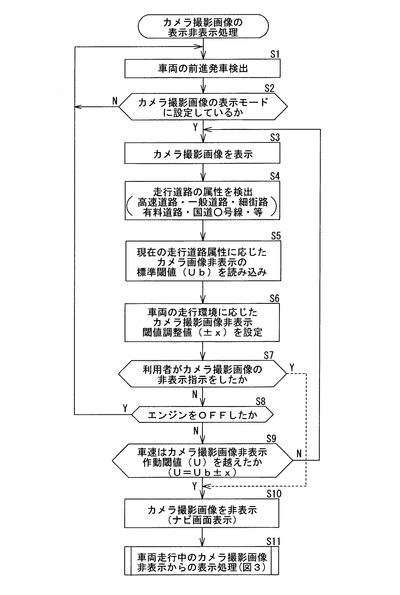
前記のような機能ブロックからなる本発明においては、例えば図2に示す作動フローによって、図1の各種機能部のうちの任意のものを選択して作動させることができる。図2に示すカメラ撮影画像の表示非表示処理の例においては、最初車両の前進発車を検出する(ステップS1)。なお、図2に示す作動フローにおいては、最初車両が停止している状態から作動を開始する例を示している。ここで用いるカメラは車両の前方を広角で撮影するフロントカメラ、或いは図6(a)に示すようなフロントカメラであり、したがって車両の前進の時のみ用いるため、図2の作動フローでは最初に車両が前進したことを前提にして、以降の作動を行うようにしている。
【0056】
次いでカメラ撮影画像の表示モードに設定しているか否かを判別している(ステップS2)。即ち、フロントカメラ撮影画像の利用については、例えば車両が後退するときに後方の障害物等を監視するリアカメラ撮影画像の利用ほど頻繁には利用されず、且つ重要性が低いため、多くの場合運転者等の利用者が所定の操作ボタンを押す等によってシステムを作動させるようになっており、したがってここではそのような操作ボタン等によってフロントカメラの撮影画像を利用する設定にしているか否かを判別している。但し、その車両の利用者がこのような操作ボタンを特に操作しなくても、所定の低速時には常にフロントカメラの画像を表示するように設定しているときには、この判別を省略することができる。
【0057】
ステップS2においてカメラの撮影画像の表示モードに設定していないと判別したときには、この利用者は現在フロントカメラの撮影画像の表示を必要としていないものとしてステップS1に戻り、カメラ撮影画像の表示モードに設定するまで待機する。それに対してステップS2においてカメラ撮影画像の表示モードにしていると判別したときには、カメラ撮影画像を表示する(ステップS3)。即ち図2に示す作動フローは前記のように車両が発車するときからの作動を示しているので、車両が発車したときには車速が零の状態から次第に上昇する状態となっている。それにより最初車両が停止しているときにはナビゲーション画面を表示しているときでも、フロントカメラの撮影画像を切り換えて表示する。
【0058】
前記作動フローの例においては、ステップS1で車両が前進発車したときからフロントカメラの撮影画像を表示する例を示しているが、それ以外に車両のシフトレバーをドライブ(D)に入れたときこれを検出し、未だ車両が前進する前からフロントカメラの撮影画像をモニタに表示するようにしても良い。
【0059】
次いで走行道路の属性を検出する(ステップS4)。この作動は図1の走行道路属性検出部30において、ナビゲーション装置11で検出した現在位置を入力し、その現在位置が存在する道路リンクのデータをナビゲーション装置の道路データから取り込むことにより、図1に示す例では現在走行している道路が高速道路32、有料道路33、国道34、一般道路35、細街路36のいずれであるかを検出している。
【0060】
その後、走行道路属性に応じたカメラ撮影画像非表示の標準閾値(Ub)を読み込む(ステップS5)。この作動は図1のカメラ撮影画像表示非表示標準閾値設定部50において、前記走行道路属性検出部30で検出した、現在走行している道路37、或いは走行予定の前方道路38のいずれか、或いは両方について、前記道路種別31のいずれであるかを検出したとき、そのデータによって予め設定している非表示用標準閾値(Ub)を読み込むことによって行う。このときの走行予定の前方道路38としては、現在走行している道路リンクに直接接続している道路リンクについて検出するように設定することもできるが、例えば100m程度先迄の道路リンクについて、その属性を検出するように設定しても良い。
【0061】
その際は例えば現在走行している道路の属性が高速道路であるときは車速が40km/h、一般道を走行しているときは15km/h、細街路を走行しているときは8km/h等に設定することができる。但し、この閾値は任意に設定することができ、例えば運転者が老人であるときには高速道路では50kmになったときからカメラ撮影画像の表示を非表示とし、また一般道を走行しているときには20kmになるまでカメラの撮影画像を表示し、細街路については15km/hになるまでカメラの撮影画像を表示するように設定することができる。逆に運転者によっては高速道路では30km/h、一般道では10km/h、細街路では5km/hのように、早めにフロントカメラの撮影画像が非表示になるようにしても良い。このような運転者の個性による閾値の設定は、後述する閾値調整値として設定することもできる。
【0062】
次いで図2に示す例においては、車両の走行環境に応じたカメラ撮影画像非表示閾値調整値(±x)を設定している(ステップS6)。この作動は図1のカメラ撮影画像表示非表示閾値調整値設定部53における、非表示用調整値(±x)設定部54において、走行環境検出部40で検出した各種の走行環境に応じて調整する。この走行環境検出部40で検出する各種の走行環境の内、例えば前方カーブ検出部41で前方に図5(a)に示すようなカーブが存在することを道路リンクの接続から検出したときには、前記非表示用標準閾値(Ub)が15km/hであるとき、+3km/hを閾値調整値に設定する等の作動を行う。
【0063】
同様に前方交差点検出部42で前方に図5(b)に示すような交差点を検出したときには、例えば+5km/hに設定し、前方駐車場進入検出部43で現在走行している道路が駐車場に進入することを検出したときには+5km/hに設定する。また、前方道路交差検出部44で、走行道路属性検出部30において現在走行している道路が高速道路である情報によって高速道路走行中の走行環境であることを検出し、更に現在走行している位置の前方に、図5(d)に示すような道路交差が存在することを検出したときには、標準閾値(Ub)が例えば40kmであるとき、+10km/hを非表示用閾値調整値に設定する。
【0064】
また、前方事故多発地点検出部45で現在走行している道路の現在地の前方に、事故が多発する地点が存在することをナビゲーション装置のデータベース等から検出したとき、例えば高速道路では+10km/h、一般道路では+5km/h等に設定する。更に、前方ナビゲーション案内地点検出部46で、現在誘導経路に沿って走行しているとき、走行すべき経路部分において運転者が注意を要することにより特に案内を必要とする地点について、予めナビゲーション装置に設定されているとき、その案内地点に近づいたことを検出すると、一般道路では15km/hを標準閾値としているのに対して、例えば+3km/h迄はカメラ撮影画像を表示するように設定しておく。したがって、図2のステップS6では、現在の走行環境に対応したこれらのカメラ撮影画像非表示閾値調整値(±x)を設定することができる。
【0065】
次いで図2に示す例においては、利用者がカメラ撮影画像の非表示指示をしたか否かを判別し(ステップS7)、前記ステップS3でカメラ撮影画像を表示している状態において、利用者が例えばカメラ作動ON・OFFスイッチを操作し、カメラの撮影画像の表示を停止する旨の操作を行ったことを検出したときには、ステップS10に進んで、カメラ撮影画像を非表示にし、例えばナビゲーション画面等の表示に切り換える。この作動は図1のカメラ撮影画像非表示指示部18における、利用者非表示指示検出部21で前記のようなスイッチの操作を検出したとき、カメラ撮影画像を非表示にする指示をモニタ表示画像選択部47に出力することにより行っている。
【0066】
その後、図2に示す例においては車両のエンジンをOFFしたか否かを判別している(ステップS8)。即ち、ステップS1で車両が前進発車したことを検出した後、車両のその後の走行中に、何らか原因で車両を停止してエンジンをOFFしたことを検出したときには、ステップS1に戻って前記作動を繰り返す。それに対してステップS8で車両のエンジンをOFFしていないと判別したときには、車速はカメラ撮影画像非表示作動閾値(U=Ub±x)を越えたか否かを判別する(ステップS9)。
【0067】
なお、図2に示す例においてはステップS8において車両のエンジンはOFFしたか否かの判別により、エンジンをOFFしたときにはステップS1に戻る例を示しているが、図1のカメラ撮影画像非表示指示部18に示すように、エンジンOFF後所定時間経過検出部24で、エンジンをOFFした後例えば10秒等の所定時間が経過したことを検出したときに、ステップS1に戻るようにしても良い。また、図1のカメラ撮影画像非表示指示部18における停車後所定時間経過検出部23で、車両が停車した後30秒等の所定時間が経過したときにステップS1に戻る態様にしても良く、前記エンジンOFF後の所定時間経過検出によってステップS1に戻る態様と重複して用いることもできる。更に、渋滞検出部25で現在渋滞中であることを検出したとき、カメラ撮影画像を非表示にしても良い。但し、渋滞検出時には非表示にすることなく、逆に作動閾値の車速値を上昇させ、非表示を遅めに設定することもでき、これらは必要に応じて任意に設定する。
【0068】
更に、図1のカメラ撮影画像非表示指示部18における表示後所定時間経過検出部22で、図2のステップS3でカメラ撮影画像を表示した後、例えば3分等の所定時間が経過したことを検出したときに、ステップS10でカメラの撮影画像を非表示にする態様を加えても良い。
【0069】
ステップS9で車速はカメラ撮影画像非表示作動閾値(U)を未だ越えていないと判別したときには、ステップS3に戻ってカメラの撮影画像を表示する状態を継続し、前記各種作動を繰り返す。それに対してステップS9で車速はカメラ撮影画像非表示作動閾値(U)を越えたと判別したときには、カメラ撮影画像を非表示にする(ステップS10)。この時に例えばこの車両の出発当初にナビゲーション画面を表示していたときには、再びナビゲーション画面に切り換えられる。その後ステップS11に進み、例えば図3に示すように、車両走行中におけるカメラ撮影画像非表示の状態から表示するための処理を行う。
【0070】
図3に示す車両走行中のカメラ撮影画像非表示からの表示処理の例においては、最初車両走行中におけるカメラ撮影画像非表示領域に存在する状態から(ステップS21)、現在走行している道路の属性を検出する(ステップS22)。この作動は前記図2のステップS4と同様の作動を行うので、詳細な説明は省略する。以降の作動においても図2と同様の作動を行うときは、同様に詳細な説明は省略する。
【0071】
その後ステップS23において、現在の走行道路属性に応じたカメラ画像表示用標準閾値(Lb)を読み込む。この作動は図1のカメラ撮影画像表示非表示標準閾値設定部50において予め設定している、表示用標準閾値(Lb)を読み込むことにより行う。この表示用標準閾値(Lb)については、図2のステップS5においては、高速道路では非表示用標準閾値を50km/hとした時には表示標準閾値を40km/hとし、一般道では非表示標準閾値を20km/hとしたときには表示用標準閾値を15km/hとし、細街路で非表示用標準閾値を12km/hとしたときには表示用標準閾値を8km/hに設定する等、非表示標準閾値は常に表示標準閾値よりもく高速側に設定しておく。次いで車両の走行環境に応じたカメラ撮影画像表示閾値調整値(±y)を設定する。この作動は図1のカメラ撮影画像表示非表示閾値調整値設定部53において、表示用調整値(±y)を設定することにより行う。
【0072】
次いで図3の例においては、利用者がカメラ撮影画像の表示指示を行ったか否かを判別している(ステップS25)。この作動は図1のカメラ撮影画像表示指示部26における、利用者表示指示検出部28で、利用者が手動スイッチを操作する等によって強制的にカメラ撮影画像を表示させる指示を検出することにより行う。ステップS25で利用者がカメラ撮影画像の表示指示を行ったと判別したときには、ステップS27においてカメラ撮影画像を表示する。この時には、モニタに各種の画像を表示している状態でも、カメラ撮影画像表示に切り換えることにより行う。
【0073】
ステップS25で利用者がカメラ撮影画像の表示指示を行っていないと判別したときには、車速はカメラ撮影画像表示作動閾値(L=Lb±y)以下になったか否か、即ちカメラ撮影画像表示作動閾値を越えて車速が低下したか否かを判別する。この判別は図1のカメラ撮影画像表示指示部26における、表示作動閾値越え検出部27で行っている。
【0074】
このステップS26において、作動閾値以下になっていないと判別したときには、ステップS22に戻って前記作動を繰り返す。それに対してステップS26で作動閾値以下になったと判別したときには、カメラ撮影画像を表示し(ステップS27)、その後ステップS28において図2のステップS4へ戻り、カメラ撮影画像を表示している状態での前記作動を行い、カメラ撮影画像の表示継続、及び非表示処理等の処理を行い、それ以降は図2及び図3の作動によって連続して作動させることができる。
【0075】
本発明は上記のような作動を行うことにより、例えば図5(c)に本発明のカメラ撮影画像表示非表示作動例を示すように、同図(a)に示すような道路属性から得られたカメラ撮影画像表示非表示標準閾値(Ub)(Lb)と、同図(b)に示すような走行環境に対応して得られたカメラ撮影画像表示非表示閾値調整値(±x)(±y)の設定によって、表示作動閾値(L=Lb±y)と非表示作動閾値(U=Ub±x)が求まり、この範囲がヒステリシス域となる。
【0076】
その結果、図5(c)の例では最初時刻t0から発車するとき、時刻と共に車速が上昇し、表示作動閾値(L)を越えてヒステリシス域に入り、更に非表示作動閾値(U)を越えた時刻t1において、カメラ撮影画像が非表示となる。その後図示の例では車速が低下し、表示作動閾値(U)より低下してヒステリシス域に入り、非表示作動閾値(L)を越えて車速が低下した時刻t2において、カメラ撮影画像を表示する。その後車速が上昇し表示作動閾値(L)を越えてヒステリシス域に入っても、非表示作動閾値(U)を越えて上昇することがないのでカメラ撮影画像は表示のまま維持され、従来のような車速の変化によって頻繁にナビゲーション画面とカメラ撮影画像とが切り換わることが無くなる。
【0077】
図5(c)の例では時刻t3の時に、例えば図1の前方交差点検出部42で、図4(b)に示すような交差点を検出した場合には、非表示作動閾値を引き上げるとともに、図示の例では同様に表示作動閾値も引き上げる。それによりカメラ撮影画像を表示する範囲が広くなり、フロントカメラを用いた安全走行が確実に行われるようになる。図5(c)に示す例においてはその後時刻t4において、前記のように走行環境の変化により引き上げられた非表示作動閾値(U)を越えるとき、カメラ撮影画像を非表示とする。その後図示されていない時間領域でこの交差点を過ぎると、再び走行環境検出部でこれを検出し、元の作動閾値となる。
【0078】
前記実施例においては、カメラ撮影画像表示非表示作動閾値設定部56での作動閾値の設定に際して、カメラ撮影画像表示非表示標準閾値設定部50で設定した標準閾値に対して、カメラ撮影画像表示非表示閾値調整値設定部53で設定した閾値調整値をプラスマイナスすることによって調整を行うようにした例を示したが、そのほか標準閾値に対して閾値調整値を係数として乗じるようにしても実施することができる。
【0079】
更に、本発明の作動に際してこのような演算を逐次行うことなく、予め各種の標準閾値についてそれぞれ、予め考えられる各種の走行環境に応じて調整した作動閾値をマトリックス状データとして記録しておき、走行環境の変化等によって任意のデータを読み取ることにより実施することもできる。この場合も道路属性に応じた標準閾値に対して、各種状態を加味する走行環境によりその閾値を調整した作動閾値のデータを利用していることには変わりはない。
【0080】
また、前記実施例において非表示作動閾値は表示作動閾値よりも高い車速に設定し、非表示作動閾値と表示作動閾値との間をヒステリシス域に設定した例を示したが、逆に非表示作動閾値は表示作動閾値よりも低い車速設定することもできる。この実施の態様のときには、車両がカメラ撮影画像表示速度以上の速度から減速していくとき、早めにカメラ撮影画像を表示できるようになる。但しその場合は、車速がカメラ撮影画像非表示速度以下にならずにカメラ撮影画像表示車速以上になったときにはその時カメラ撮影画像を非表示にする。またこの実施の態様のときには、車両がカメラ撮影画像非表示速度以下の速度から加速していくとき、早めにカメラ撮影画像を非表示にできるようにもなる。但しその場合は、車速がカメラ撮影画像表示速度以上にならずに再びカメラ撮影画像非表示速度以下になったときには、その時カメラ撮影画像を表示する。また、このような作動態様は、前記非表示作動閾値を表示作動閾値よりも高い車速に設定することによりヒステリシス領域を設ける態様と、車両の走行環境等によって任意に切り換えるように設定することも可能である。
【符号の説明】
【0081】
11 ナビゲーション装置 12 外部情報取込部
13 渋滞検出部 14 渋滞
15 混雑 16 空き道路
17 車速検出部 18 カメラ撮影画像非表示指示部
20 非表示作動閾値越え検出 21 利用者非表示指示検出
22 表示後所定時間経過検出 23 停車後所定時間経過検出
24 エンジンOFF後所定時間経過検出 25 渋滞検出
26 カメラ撮影画像表示指示部 27 表示作動閾値越え検出部
28 利用者表示指示検出部 30 走行道路属性検出部
31 道路種別 32 高速道路
33 有料道路 34 国道
35 一般道路 36 細街路
37 現在走行道路 38 走行予定前方道路
40 走行環境検出部 41 前方カーブ検出
42 前方交差点検出 43 前方駐車場進入検出
44 前方道路交差検出 45 前方事故多発地点検出
46 前方ナビゲーション案内地点検出 47 モニタ表示画像選択部
50 カメラ撮影画像表示非表示標準閾値設定部 51 非表示用標準閾値
52 表示用標準閾値 53 カメラ撮影画像表示非表示閾値調整値設定部
54 非表示用調整値 55 表示用調整値
56 カメラ撮影画像表示非表示作動閾値設定部 57 非表示作動閾値
58 表示作動閾値 60 車両
61 フロントカメラ 62 モニタ
【技術分野】
【0001】
本発明は車両に搭載したフロントカメラ等の車外撮影カメラの画像を、通常はナビゲーション用表示等を行っているモニタに割り込み表示を行うための、カメラ撮影画像表示装置に関する。
【背景技術】
【0002】
近年はデジタルカメラやデジタルビデオカメラが安価になり、車両にも各種のカメラが取り付けられるようになっている。即ち、車両の運転に際しては、運転者は特に車両の後方を見ることが困難のため、従来より車両の後部下方を撮影するカメラを設け、そのカメラの撮影映像をモニタに表示することができるようにし、車両の後退時にはモニタにそのカメラの撮影映像を表示することが行われている。
【0003】
このような車両の周囲を撮影するカメラについては、前記のような後方を撮影するカメラのほか、車両が前進するときでも、左右の見通しの悪い交差点に入るとき、或いは左右が見にくい車庫から道路に出るときには、運転者が実際に左右の状態を確認できるまで車両の先端が1m程度は前進しなければならないことが多いため、その前進の過程で他の車両や自転車、歩行者等に接触し、或いは通行の妨害をすることを防止できるように、例えば車両の先端両側部にそれぞれの側方を撮影するカメラを設け、モニタの表示画面を左右に分割して、それぞれのカメラの画像を表示することも行われている。
【0004】
更に近年は前方を撮影するカメラを設け、必要に応じてソナーや小型レーダーと共に用い、撮影画像等を解析することにより前方を走行する車両に追突しないように、また追従して自動走行できるようにする技術が開発され、そのためにも車両の前方を撮影するカメラを搭載するようになっている。
【0005】
また近年は車両の前方、後方、両側方を撮影するカメラを搭載し、これらのカメラの撮影画像を処理してあたかも車両の上方に配置した1つのカメラで車両の周囲を撮影したものと同様の画像をモニタに表示する技術も実用化されている。このように車両に搭載した種々のカメラによって車両の周囲を撮影し、これをモニタに表示して車両の運転を支援する車両運転支援装置が開発され、また研究がなされている。このようなカメラのシステムでも、設置した複数のカメラを単独で、或いは複数用いてそれぞれのカメラの撮影画像も表示することができるようにしたマルチビューシステムも開発されている。
【0006】
上記のように車両には種々のカメラが取り付けられるようになっており、その中でも前記のような車両前方、或いは車両前方における両側方を主として撮影するカメラについては、当然車両が前進するときに、モニタにカメラの撮影画像を表示することとなるが、このカメラの撮影画像の利用態様からみると、車両が注意深く前進するときであり、したがってほとんどの場合は低速走行の時に使用され、ある程度高速になったときにはこれを使用する必要はなくなる。その時にはモニタにナビゲーション装置の地図画面が表示されているときには、カメラの撮影画像の表示を止めたとき、自動的にナビゲーション装置の画面表示に切り換わるようにしている。
【0007】
この状態を図6に示しており、同図(a)に示すような車両60の前方部分に主として車両の前方側部を撮影するフロントカメラ61左右にそれぞれ設けており、通常は同図(b)に示すようにナビゲーション画面が表示されているときでも、フロントカメラの撮影画像を表示したいと思ったときには、手動操作等により同図(c)に示すような両カメラの撮影画像をモニタ62の表示部を半分に分け、それぞれに左右のカメラの撮影画像を表示している。
【0008】
上記のようなフロントカメラの撮影画像の表示は、利用者がもう必要ではないと思ったとき操作ボタン等を操作して表示を止めることが行われる。それに対して、利用者の手を煩わせることなく、自動的に表示を止める技術として、例えば特許文献1に開示されているように、所定速度以上になったときは自動的に表示を止める技術が存在する。また、車両減速時の加速度を検知し、この減速加速度と、所定速度に減速されるまでの時間とによって車両の停止時期を予測し、この予測に対応してカメラ撮影画像表示を行う作動時間を決定し、急激な減速時には早めに、ゆっくりとした減速時には遅めに画像表示する技術は特許文献2に開示されている。
【0009】
更に、車速が所定の速度以下で、且つ、車両が渋滞車列の中にないと判定された場合にカメラ撮影画像を表示する技術は特許文献3に開示されている。なおこの文献には、渋滞車列の中にない場合でも、道路種別が高速道路、自動車専用道路または山岳道路である場合は、所定速度以下になってもモニタに画像を表示しないようにし、また、渋滞車列の中にある場合でも、見通しの悪い交差点であると判定された場合は、車速が所定速度以下になると画像を表示する技術も開示されている。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平5−268607号公報
【特許文献2】特開平11−212001公報
【特許文献3】特開2007−127491号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
前記のように、図6(c)のようなフロントカメラの撮影画像は、車両が低速であるときのみ必要とするため、前記特許文献1に開示されている技術では、車両が所定の閾値の速度(V)以上になったとき、フロントカメラの撮影画像の表示を行わない技術が開示されているが、この技術では車両が再び前記所定の閾値の速度(V)以下になったときフロントカメラの撮影画像の表示を行うため、車両がこの所定の閾値の速度近傍でしばらく走行するとき、モニタの画面はフロントカメラの撮影画像とナビゲーション画面とが頻繁に切り換わり、見にくい画面表示とならざるを得ない。特にナビゲーション画面を見たいとき、頻繁にフロントカメラの撮影画像の表示と切り換わって、ナビゲーション画面を見ることができなくなる。
【0012】
また、フロントカメラ撮影画像の表示のオンオフは所定の閾値の車速であるため、例えば高速道路走行時と一般道路走行時とで同じ閾値の速度であり、更には国道のような広い道路と、細街路のような細くて左右からの飛び出し等が起こりやすい道路とが同じ閾値の速度となっているため適切ではない。
【0013】
更に前記特許文献2に開示された技術では車両の減速時の加速度を検出して、その加速度のデータを利用してカメラ撮影画像の表示非表示を行う方式では、フロンとカメラの撮影画像を表示するタイミングとしては適切ではない場合が多く、車両走行の実態には必ずしも適合していない。
【0014】
また、前記特許文献3に開示された技術のように、渋滞の状態や、走行する道路の属性、更には見通しの悪い交差点等を検出してフロントカメラの撮影画像の表示非表示を設定する技術では、やはり前記特許文献1に開示された技術と同様に、頻繁にフロントカメラの撮影画像の表示とナビゲーション画面等が切り換わる問題を生じる。
【0015】
したがって本発明は、車外を撮影するカメラの画像をモニタに表示するに際して、カメラの撮影画像の表示と非表示が頻繁に切り換わることがないようにし、しかも車両が走行する道路の属性に応じて適切な表示と非表示がなされると共に、車両の走行環境等によっても適切な表示と非表示を行うことができるようにしたカメラ撮影画像表示装置を提供することを主たる目的とする。
【課題を解決するための手段】
【0016】
本発明に係るカメラ撮影画像表示装置は、前記課題を解決するため、 走行する道路の属性を検出する走行道路属性検出手段と、走行道路属性に対応して、カメラ撮影画像の表示標準閾値と非表示標準閾値を設定するカメラ撮影画像表示非表示標準閾値設定手段と、前記表示標準閾値及び非表示標準閾値によって、実際にカメラ撮影画像を表示作動するための表示作動閾値と、カメラ撮影画像を非表示作動するための非表示作動閾値とを設定するカメラ撮影画像表示非表示作動閾値設定手段と、前記非表示作動閾値と、現在の車速を検出する車速検出手段から取り込んだ現在の車速とを比較し、現在の車速が非表示作動閾値よりも低い状態から高くなったとき、カメラの撮影画像の表示を非表示とする指示を行うカメラ撮影画像非表示指示手段と、前記表示作動閾値と、前記現在の車速とを比較し、現在の車速が表示作動閾値よりも高い状態から低くなったとき、カメラの撮影画像を表示するカメラ撮影画像表示指示手段とを備えたことを特徴とする。
【0017】
また、本発明に係る他のカメラ撮影画像表示装置は、前記カメラ撮影画像表示装置において、車両の走行環境を検出する走行環境検出手段と、走行環境に対応して、前記表示標準閾値と非表示標準閾値とを調整するための、表示閾値調整値及び非表示閾値調整値を設定するカメラ撮影画像表示非表示閾値調整値設定手段とを備え、前記カメラ撮影画像表示非表示作動閾値設定手段は、前記表示標準閾値及び非表示標準閾値と、前記表示閾値調整値及び非表示閾値調整値とによって、実際にカメラ撮影画像を表示作動するための表示作動閾値と、カメラ撮影画像を非表示作動するための非表示作動閾値とを設定することを特徴とする。
【0018】
また、本発明に係る他のカメラ撮影画像表示装置は、前記カメラ撮影画像表示装置において、前記走行環境の検出に際しては、前方にカーブが存在することを検出する前方カーブ検出、前方に交差点が存在することを検出する前方交差点検出、走行中の道路の前方は駐車場に進入することを検出する前方駐車場進入検出、高速道路走行中において前方に道路交差が存在することを検出する前方道路交差検出、前方に事故多発地点が存在することを検出する前方事故多発地点検出、前方にナビゲーション装置による誘導経路案内地点が存在することを検出する前方ナビゲーション案内地点検出、現在道路が渋滞していることを検出する渋滞検出、のいずれかの検出、或いはこれらの検出の組み合わせにより走行環境を検出し、前記表示作動閾値または非表示作動閾値を変化することを特徴とする。
【0019】
また、本発明に係る他のカメラ撮影画像表示装置は、前記カメラ撮影画像表示装置において、前記表示作動閾値及び非表示作動閾値を、前記走行道路の属性に応じた標準閾値に対して、前記閾値調整値を加減算することにより、または前記閾値調整値を標準閾値に対して係数として乗ずることにより、或いは前記加減算または係数を乗じた値を予め計算したデータを記録しておき、これを現在の走行環境に対応して読み込むことにより求めることを特徴とする請求項2記載のカメラ撮影画像表示装置。
【0020】
また、本発明に係る他のカメラ撮影画像表示装置は、前記カメラ撮影画像表示装置において、前記走行環境の検出を、車両外部と通信を行う外部情報取込部の情報を用いて行うことを特徴とする請求項2記載のカメラ撮影画像表示装置。
【0021】
また、本発明に係る他のカメラ撮影画像表示装置は、前記カメラ撮影画像表示装置において、前記非表示作動閾値を表示作動閾値よりも高い車速に設定し、前記非表示作動閾値と表示作動閾値との間をヒステリシス域に設定したことを特徴とする請求項1記載のカメラ撮影画像表示装置。
【0022】
また、本発明に係る他のカメラ撮影画像表示装置は、前記カメラ撮影画像表示装置において、前記表示作動閾値または非表示作動閾値を、運転者の特性によって任意に変化させることを特徴とする請求項1記載のカメラ撮影画像表示装置。
【0023】
また、本発明に係る他のカメラ撮影画像表示装置は、前記カメラ撮影画像表示装置において、前記カメラの撮影画像表示時には、利用者が非表示にする指示を検出する利用者非表示指示検出、カメラ撮影画像表示後所定時間が経過したことを検出する表示後所定時間経過検出、車両停車後所定時間が経過したことを検出する停車後所定時間経過検出、エンジンをOFFしてから所定時間が経過したことを検出するエンジンOFF後所定時間経過検出、現在走行している道路が渋滞していることを検出する渋滞検出、のいずれかの検出時にカメラ撮影画像を非表示にすることを特徴とする。
【発明の効果】
【0024】
本発明は上記のように構成したので、車外を撮影するカメラの画像をモニタに表示するに際して、カメラの撮影画像の表示と非表示が頻繁に切り換わることがないようにし、しかも車両が走行する道路の属性に応じて適切な表示と非表示がなされると共に、車両の走行環境等によっても適切な表示と非表示を行うことができるようになる。
【図面の簡単な説明】
【0025】
【図1】本発明の実施例の機能ブロック図である。
【図2】同実施例の作動フロー図である。
【図3】図2の作動フローの続きの作動フロー図である。
【図4】道路リンクを用いた走行環境検出の各種態様を示す図である。
【図5】本発明の作動閾値の設定過程、及び作動例を示す図である。
【図6】フロントカメラを用いた撮影画像と、ナビゲーション画面との切り換え状態を示す図である。
【発明を実施するための形態】
【実施例】
【0026】
本発明の実施例を図面に沿って説明する。図1は本発明の実施例の機能ブロック図であり、同図には本発明を各種の態様で実施できるようにした例を示しており、したがって本発明においてはこれらの各種機能部の内任意のものを選択して実施することができるようにしている。なお、同図に示す各機能部は、それぞれ各機能を行う手段と言うこともできる。
【0027】
最初に図1の機能ブロック図の全体概要を説明する。図1に示す例においては、ナビゲーション装置11の画面表示用データはモニタ表示画像選択部47で、車両60のフロントカメラ61の撮影画像と任意に切り換えて表示することができるようにしており、モニタ表示画像選択部47では後述するように、カメラ撮影画像非表示指示部18と、カメラ撮影画像表示指示部26の指示によって、モニタ62へのカメラ撮影画像の表示を切り換えるようにしている。
【0028】
また、カメラ撮影画像非表示指示部18とカメラ撮影画像表示指示部26は、カメラ撮影画像表示非表示作動閾値設定部56で設定した作動閾値と、車速検出部17で検出した車両60の車速と比較し、カメラ撮影画像表示と非表示の指示を行っている。また、カメラ撮影画像表示非表示作動閾値設定部56では、カメラ撮影画像表示非表示標準閾値設定部50で設定した、走行道路属性検出部30で検出した現在走行している道路の属性に対応した標準閾値と、更にカメラ撮影画像表示非表示閾値調整値設定部53で設定した、走行環境検出部40で検出した各種車両の走行環境に対応した閾値調整値とによって、カメラ撮影画像の表示非表示の作動を行う閾値を求めている。
【0029】
前記走行道路属性検出部30は、ナビゲーション装置11で検出した現在地と、現在走行している道路のリンク、更にはこれから走行する道路のリンクによって得られる道路の属性データによって、走行道路の属性を検出している。また、前記走行環境検出部36では、ナビゲーション装置により得られる現在走行している道路や車両の環境を検出し、外部情報取込部12で取り込んだ渋滞情報等の情報を利用し、更には現在の車速を車速検出部17から取り込んで、現在の車両の各種走行環境を検出するようにしている。
【0030】
これらの機能部を以下に順に説明する。ナビゲーション装置11は現在広く用いられているナビゲーション装置が使用でき、地図を描画するための地図データ及び施設等を検索するための施設情報データを記録したCD−ROM、DVD−ROM、ハードディスク等の地図・情報データ記憶媒体と、この地図・情報データ記憶媒体のデータを取り込むデータ取込装置と、地図等を表示するモニタと、GPS受信機及び走行距離センサやジャイロ等を用いた自立航法装置を用い、車両の現在位置及び進行方向の方位を検出する車両位置検出装置を有し、車両の現在位置を含む地図データを地図・情報データ記憶媒体から取り込み、この地図データに基づいて車両位置の周囲の地図画像をモニタの画面に描画すると共に、車両位置マークをモニタ画面に重ね合わせて表示し、車両の移動に応じて地図画像をスクロール表示し、或いは地図画像を画面に固定し車両位置マークを移動させ、車両が現在どこを走行しているのかを一目でわかるようにしている。
【0031】
CD−ROMやDVD−ROM、或いはハードディスク等の地図・情報データ記憶媒体に記憶されている地図データは、各種の縮尺レベルに応じて適当な大きさの経度幅及び緯度幅に区切られており、道路等は経度及び緯度で表現されたノードの座標集合として記憶されている。道路は2以上のノードの連結からなり、地図データは、道路リスト、ノードテーブル及び交差点構成ノードリスト等からなる道路レイヤ、及び地図画面上に道路、建築物、施設、公園及び河川等を表示するための背景レイヤ等の地図データと、市町村名などの行政区画名、道路名、交差点名及び施設の名前等の、文字や地図記号等を表示するための情報データなどから構成される。
【0032】
また、このナビゲーション装置においては、利用者が所望の目的地或いは経由地(以下「目的地」と称する)に向けて道路を間違うことなく容易に走行できるようにするための経路誘導機能を備えている。この経路誘導機能によれば、種々の手段により目的地を設定し、出発地から目的地まで、これらの地点を結ぶ経路の内各種の条件を加味して適切な経路を演算して提示するようになっている。また、利用者が選択した経路を誘導経路として記憶しておき、走行中、地図画像上に誘導経路を他の経路とは色を変えて太く描画して画面表示したり、車両が誘導経路上の進路を変更すべき交差点に一定距離以内に近づいたときに、交差点を拡大表示し、進路を変更すべき方向を示す矢印等を描画して画面表示したり、音声で右左折の誘導を行うことで、利用者を目的地まで案内することができるようにしている。
【0033】
図1に示すナビゲーション装置11においては、前記のような従来のナビゲーション装置が備えている機能を利用し、そこで作成されるデータを特に走行道路属性検出部30、走行環境検出部40に出力して利用可能としている。また、ナビゲーション装置11で作成する出力画面には、地図画面に自車位置マークを重ねて表示するほか、誘導経路や渋滞情報、更には右左折交差点の案内表示等を行うことができるようにしている。
【0034】
外部情報取込部12においては、VICS、或いは携帯電話等を利用して外部の各種情報提供機関と接続し、特に渋滞検出部13において、渋滞14、混雑15、現在走行している道路は混雑もしていない空き道路16であること等を検出する。なお、この外部情報取込部12では、このほか車両走行方向の事故情報や道路工事情報、道路近接火事情報等も取り込むようにしても良い。この外部情報取込部12は前記のように独立した機能部として存在しうるが、ナビゲーション装置11の一機能部として存在していても良い。その際にはこれらの外部情報はナビゲーション装置11から取り込むことができるようになる。
【0035】
車速検出部17では車両60の現在の走行速度を検出しており、その検出データは走行環境検出部40に出力して、車両の現在の走行環境データとして用い、更にカメラ撮影画像非表示指示部18、及びカメラ撮影画像表示指示部26に出力して、前記のようにカメラ撮影画像表示非表示作動閾値設定部56で設定した車速に閾値と比較できるようにしている。
【0036】
走行道路属性検出部30においては、特にナビゲーション装置11から取り込んだ現在走行道路37、或いはこれから走行する道路としての走行予定前方道路について、道路種別31を検出している。道路種別31としては、図示の例では高速道路32、有料道路33、国道34、一般道路35、細街路36等を検出できるようにしている。この走行道路属性検出部30のデータは、カメラ撮影画像表示非表示標準閾値設定50に出力している。
【0037】
カメラ撮影画像表示非表示標準閾値設定部50では、図5(a)に拡大して示すように、同図の矢印Aのように車速(V)が時間(t)につれて上昇し、走行道路属性検出部30で検出した道路属性によって予め設定している、非表示用標準閾値(Ub)迄上昇したときにカメラ撮影画像を非表示にすることを標準として設定する。また同図の矢印Bに示すように、車速が前記のように非表示用標準閾値(Ub)よりも高い状態から時間につれて降下して、表示用標準閾値(Lb)よりも低下したとき、再び表示することを標準として設定する。
【0038】
したがって、同図のグラフに示すように、表示用標準閾値(Lb)と非表示用標準閾値(Ub)との間の速度部分は、制御の「ヒステリシス域」ということができ、この設定によって特定の速度の閾値で表示非表示の切り換え作動を行うときのような、頻繁な表示切り換えを防止することができる。なお、このようなヒステリシス特性を持たせて制御することによりハンチングを防止することは広く行われているが、本発明においては特にナビゲーション案内の画面を表示しているとき、頻繁なカメラ撮影画像の表示が自動的に行われることにより、運転者が安全に運転することができなくなる問題を、この手法を採用することによって解決することができる、という特有の効果を奏することとなる。
【0039】
図1におけるカメラ撮影画像表示非表示閾値調整値設定部53では、前記のように走行環境検出部40で検出した走行環境により、カメラ撮影画像表示非表示標準閾値設定部50で設定した標準閾値(Ub)(Lb)を調整し、より実態に適合した閾値を得ることができるようにしている。即ち、走行環境検出部40では例えば前方カーブ検出部41によって、車両の現在走行している道路の前方に所定以上急なカーブが存在することを検出する。
【0040】
その際には例えば図4(a)に示すように、ナビゲーション装置によって現在走行している道路データである道路リンクについて、これと走行方向前方で接続する道路リンクを検出し、更にその先の道路リンクを順に検出することにより、各道路リンクの方位データの変化から、これから走行する道路は所定以上の急なカーブであることを検出することができる。
【0041】
また、前方交差点検出部42では、車両が現在走行している道路の前方に交差点が存在することを検出する。その際には例えば図4(b)に示すように、ナビゲーション装置によって前記のような道路リンクをたどることにより図中T字路で示す交差点が存在することを検出することができ、それによりこれから交差点を走行することを前もって検出することができる。
【0042】
前方駐車場進入検出部43では、現在走行している道路のすぐ先には駐車場が存在し、その駐車場に車両が進入しようとしていることを検出する。その際には例えば図4(c)に示すように、ナビゲーション装置によって前記のような道路リンクの先には駐車場が存在することを検出することによって実行することができる。
【0043】
前方道路交差検出部44では、現在車両が高速道路を走行しているとき、現在走行している道路の前方に他の高速道路等が交差する、道路交差が存在することを検出する。その際には例えば図4(d)に示すように、ナビゲーション装置によって前記のような道路リンクの先には他の道路が交差する道路交差が存在することを検出することによって実行できる。
【0044】
前方事故多発地点検出部45では、ナビゲーション装置が備えている地図データベースに予め道路地図に対応して事故多発地点のデータが記録されているとき、車両が現在その事故多発地点に近づいていることを検出することにより実施する。また、前方ナビゲーション案内地点検出部46では、ナビゲーション装置で誘導経路を設定し、例えば車両が現在誘導経路上での右左折交差点に近づいていることを検出したとき、前記のような前方交差点検出部42による検出を行う前でも、特に誘導経路上において右左折交差点に近づいていることを検出する。走行環境検出部40ではその外、料金所を検出する等の、更に種々の走行環境を検出するようにしても良い。走行環境検出部40では、現在走行している道路リンク部分に限らず、例えば現在地から100m程度先までについての走行環境を検出するようにしても良い。
【0045】
カメラ撮影画像表示非表示閾値調整値設定部53では、走行環境検出部40で検出したこれらの検出データ、或いはこれらの検出部の内任意に選択した検出部のデータを利用し、閾値の標準として設定した前記カメラ撮影画像標準閾値設定部50の閾値に対して、調整値を設定する。その際には図5(b)に示すように、非表示用標準閾値(Ub)に対して走行環境に応じた非表示用調整値(±x)を設定する。
【0046】
ここで+xに設定したときには、非表示用標準閾値(Ub)よりも閾値の速度を上昇させ、それによりカメラ撮影画像が表示状態から非表示状態に切り換えるとき、標準の閾値の速度よりも車速が上昇したときに非表示にすることとなる。逆に−xに設定したときには、非表示用標準閾値(Ub)よりも上記閾値の速度を下げ、それによりカメラ撮影画像が表示状態から非表示状態に切り換えるとき、標準の閾値の速度よりも速度が低いときに非表示にすることとなる。
【0047】
また、表示用調整値(Lb)に対しては、走行環境に応じて表示用調整値(±y)を設定する。ここで+yに設定したときには、表示用標準閾値(Lb)よりも閾値の速度を上昇させ、それによりカメラ撮影画像が非表示状態から表示状態に切り換える時、標準の閾値の速度よりも速度が速い状態で表示することとなる。それに対して−yに設定したときには、表示用標準閾値(Lb)よりも上記閾値の速度を下げ、それによりカメラ撮影画像が非表示の状態から表示状態に切り換えるとき、標準の閾値の速度よりも速度が低いときに表示することとなる。
【0048】
カメラ撮影画像表示非表示作動閾値設定部56では、カメラ撮影画像表示非表示標準閾値設定部50で設定した前記のような標準閾値(Ub)(Lb)のデータと、カメラ撮影画像表示非表示閾値調整値設定部53で設定した前記のような閾値調整値(±x)(±y)のデータを用い、モニタに表示するカメラ撮影画像の実際の非表示作動閾値(U)と、実際の表示作動閾値(L)とを設定する。ここで非表示作動閾値(U)は(U=Ub±x)であり、表示作動閾値(L)は(L=Lb±y)となる。
【0049】
この中で非表示作動閾値(U)については、カメラ撮影画像非表示指示部18に出力し、特にこの中の非表示作動閾値越え検出部20において、ここで入力したカメラ撮影画像非表示作動閾値(U)と車速検出部17で検出した車両の現在の速度とを比較し、現在の車速(V)が前記(U)を越えたことを検出する。その検出によってカメラ撮影画像非表示指示部18ではモニタ表示画像選択部47に信号を出力し、現在モニタに表示しているカメラ撮影画像から、図示の例ではナビゲーション装置11の画像を選択して表示する。なお、ここで必要ならばテレビ画面を選択して切り換えることもできる。
【0050】
図1に示すカメラ撮影画像非表示指示部18においては、前記非表示作動閾値越え検出部20の他、利用者非表示指示検出部21を備え、利用者が強制的にカメラ撮影画像を非表示にしたいと思ったとき、所定の操作ボタン、或いはタッチパネル部分を操作することによって非表示にすることができるようにしている。また、表示後所定時間経過検出部22では、ここで例えば10秒等に設定しておくことにより、カメラ撮影画像を表示した時からの経過時間を計測し、10秒が経過したときには強制的に非表示にすることができるようにしている。
【0051】
また、停車後所定時間経過検出部23では、車両が停止したときから例えば30秒等に設定しておくことにより、車両が停止したことを検出してからの経過時間を計測し、30秒が経過したときには強制的に非表示にすることができるようにしている。更にエンジンOFF後所定時間経過検出部24では、利用者がエンジンをOFFしたときからの経過時間を計測し、例えば10秒等の所定時間が経過したことを検出したとき、強制的に非表示とすることができる。また、渋滞検出部25においては、前記外部情報取込部12の渋滞検出部13で渋滞14を検出したときその信号を取り込んで、現在は渋滞であることにより所定以下の低速であっても、カメラの撮影画像を表示しないようにすることができるようにしている。
【0052】
したがってカメラ撮影画像非表示指示部18では、非表示作動閾値越え検出部20と、これ以外の各種の検出部の内で予め設定している任意の検出部の作動により、カメラ撮影画像非表示の指示をモニタ表示画像選択部47に出力し、カメラ撮影画像の表示を止め、例えばナビゲーション画面等に切り換える。
【0053】
カメラ撮影画像表示非表示作動閾値設定部56における表示作動閾値(L)については、カメラ撮影画像表示指示部26に出力し、特にこの中の表示作動閾値越え検出部27において、ここで入力したカメラ撮影画像表示作動閾値(L)と車速検出部17で検出した車両の現在の速度とを比較し、現在の車速(V)が前記表示作動閾値(L)を越えたことを検出する。この時の車速(V)が表示作動閾値(L)を越えたか否かの判別に際しては、車速(V)が表示作動閾値(L)より低下したことを検出することとなる。この検出によってカメラ撮影画像表示指示部26では、モニタ表示画像選択部47に信号を出力し、現在表示している例えばナビゲーション画面から、カメラ撮影画像の表示を選択して切り換える。
【0054】
図示するカメラ撮影画像表示指示部26には利用者表示指示検出部28を備え、利用者がカメラ撮影画像をモニタに表示させたいと思ったとき、前記表示作動とは関係なく、強制的にカメラ撮影画像をモニタに表示させることができるようにしている。
【0055】
前記のような機能ブロックからなる本発明においては、例えば図2に示す作動フローによって、図1の各種機能部のうちの任意のものを選択して作動させることができる。図2に示すカメラ撮影画像の表示非表示処理の例においては、最初車両の前進発車を検出する(ステップS1)。なお、図2に示す作動フローにおいては、最初車両が停止している状態から作動を開始する例を示している。ここで用いるカメラは車両の前方を広角で撮影するフロントカメラ、或いは図6(a)に示すようなフロントカメラであり、したがって車両の前進の時のみ用いるため、図2の作動フローでは最初に車両が前進したことを前提にして、以降の作動を行うようにしている。
【0056】
次いでカメラ撮影画像の表示モードに設定しているか否かを判別している(ステップS2)。即ち、フロントカメラ撮影画像の利用については、例えば車両が後退するときに後方の障害物等を監視するリアカメラ撮影画像の利用ほど頻繁には利用されず、且つ重要性が低いため、多くの場合運転者等の利用者が所定の操作ボタンを押す等によってシステムを作動させるようになっており、したがってここではそのような操作ボタン等によってフロントカメラの撮影画像を利用する設定にしているか否かを判別している。但し、その車両の利用者がこのような操作ボタンを特に操作しなくても、所定の低速時には常にフロントカメラの画像を表示するように設定しているときには、この判別を省略することができる。
【0057】
ステップS2においてカメラの撮影画像の表示モードに設定していないと判別したときには、この利用者は現在フロントカメラの撮影画像の表示を必要としていないものとしてステップS1に戻り、カメラ撮影画像の表示モードに設定するまで待機する。それに対してステップS2においてカメラ撮影画像の表示モードにしていると判別したときには、カメラ撮影画像を表示する(ステップS3)。即ち図2に示す作動フローは前記のように車両が発車するときからの作動を示しているので、車両が発車したときには車速が零の状態から次第に上昇する状態となっている。それにより最初車両が停止しているときにはナビゲーション画面を表示しているときでも、フロントカメラの撮影画像を切り換えて表示する。
【0058】
前記作動フローの例においては、ステップS1で車両が前進発車したときからフロントカメラの撮影画像を表示する例を示しているが、それ以外に車両のシフトレバーをドライブ(D)に入れたときこれを検出し、未だ車両が前進する前からフロントカメラの撮影画像をモニタに表示するようにしても良い。
【0059】
次いで走行道路の属性を検出する(ステップS4)。この作動は図1の走行道路属性検出部30において、ナビゲーション装置11で検出した現在位置を入力し、その現在位置が存在する道路リンクのデータをナビゲーション装置の道路データから取り込むことにより、図1に示す例では現在走行している道路が高速道路32、有料道路33、国道34、一般道路35、細街路36のいずれであるかを検出している。
【0060】
その後、走行道路属性に応じたカメラ撮影画像非表示の標準閾値(Ub)を読み込む(ステップS5)。この作動は図1のカメラ撮影画像表示非表示標準閾値設定部50において、前記走行道路属性検出部30で検出した、現在走行している道路37、或いは走行予定の前方道路38のいずれか、或いは両方について、前記道路種別31のいずれであるかを検出したとき、そのデータによって予め設定している非表示用標準閾値(Ub)を読み込むことによって行う。このときの走行予定の前方道路38としては、現在走行している道路リンクに直接接続している道路リンクについて検出するように設定することもできるが、例えば100m程度先迄の道路リンクについて、その属性を検出するように設定しても良い。
【0061】
その際は例えば現在走行している道路の属性が高速道路であるときは車速が40km/h、一般道を走行しているときは15km/h、細街路を走行しているときは8km/h等に設定することができる。但し、この閾値は任意に設定することができ、例えば運転者が老人であるときには高速道路では50kmになったときからカメラ撮影画像の表示を非表示とし、また一般道を走行しているときには20kmになるまでカメラの撮影画像を表示し、細街路については15km/hになるまでカメラの撮影画像を表示するように設定することができる。逆に運転者によっては高速道路では30km/h、一般道では10km/h、細街路では5km/hのように、早めにフロントカメラの撮影画像が非表示になるようにしても良い。このような運転者の個性による閾値の設定は、後述する閾値調整値として設定することもできる。
【0062】
次いで図2に示す例においては、車両の走行環境に応じたカメラ撮影画像非表示閾値調整値(±x)を設定している(ステップS6)。この作動は図1のカメラ撮影画像表示非表示閾値調整値設定部53における、非表示用調整値(±x)設定部54において、走行環境検出部40で検出した各種の走行環境に応じて調整する。この走行環境検出部40で検出する各種の走行環境の内、例えば前方カーブ検出部41で前方に図5(a)に示すようなカーブが存在することを道路リンクの接続から検出したときには、前記非表示用標準閾値(Ub)が15km/hであるとき、+3km/hを閾値調整値に設定する等の作動を行う。
【0063】
同様に前方交差点検出部42で前方に図5(b)に示すような交差点を検出したときには、例えば+5km/hに設定し、前方駐車場進入検出部43で現在走行している道路が駐車場に進入することを検出したときには+5km/hに設定する。また、前方道路交差検出部44で、走行道路属性検出部30において現在走行している道路が高速道路である情報によって高速道路走行中の走行環境であることを検出し、更に現在走行している位置の前方に、図5(d)に示すような道路交差が存在することを検出したときには、標準閾値(Ub)が例えば40kmであるとき、+10km/hを非表示用閾値調整値に設定する。
【0064】
また、前方事故多発地点検出部45で現在走行している道路の現在地の前方に、事故が多発する地点が存在することをナビゲーション装置のデータベース等から検出したとき、例えば高速道路では+10km/h、一般道路では+5km/h等に設定する。更に、前方ナビゲーション案内地点検出部46で、現在誘導経路に沿って走行しているとき、走行すべき経路部分において運転者が注意を要することにより特に案内を必要とする地点について、予めナビゲーション装置に設定されているとき、その案内地点に近づいたことを検出すると、一般道路では15km/hを標準閾値としているのに対して、例えば+3km/h迄はカメラ撮影画像を表示するように設定しておく。したがって、図2のステップS6では、現在の走行環境に対応したこれらのカメラ撮影画像非表示閾値調整値(±x)を設定することができる。
【0065】
次いで図2に示す例においては、利用者がカメラ撮影画像の非表示指示をしたか否かを判別し(ステップS7)、前記ステップS3でカメラ撮影画像を表示している状態において、利用者が例えばカメラ作動ON・OFFスイッチを操作し、カメラの撮影画像の表示を停止する旨の操作を行ったことを検出したときには、ステップS10に進んで、カメラ撮影画像を非表示にし、例えばナビゲーション画面等の表示に切り換える。この作動は図1のカメラ撮影画像非表示指示部18における、利用者非表示指示検出部21で前記のようなスイッチの操作を検出したとき、カメラ撮影画像を非表示にする指示をモニタ表示画像選択部47に出力することにより行っている。
【0066】
その後、図2に示す例においては車両のエンジンをOFFしたか否かを判別している(ステップS8)。即ち、ステップS1で車両が前進発車したことを検出した後、車両のその後の走行中に、何らか原因で車両を停止してエンジンをOFFしたことを検出したときには、ステップS1に戻って前記作動を繰り返す。それに対してステップS8で車両のエンジンをOFFしていないと判別したときには、車速はカメラ撮影画像非表示作動閾値(U=Ub±x)を越えたか否かを判別する(ステップS9)。
【0067】
なお、図2に示す例においてはステップS8において車両のエンジンはOFFしたか否かの判別により、エンジンをOFFしたときにはステップS1に戻る例を示しているが、図1のカメラ撮影画像非表示指示部18に示すように、エンジンOFF後所定時間経過検出部24で、エンジンをOFFした後例えば10秒等の所定時間が経過したことを検出したときに、ステップS1に戻るようにしても良い。また、図1のカメラ撮影画像非表示指示部18における停車後所定時間経過検出部23で、車両が停車した後30秒等の所定時間が経過したときにステップS1に戻る態様にしても良く、前記エンジンOFF後の所定時間経過検出によってステップS1に戻る態様と重複して用いることもできる。更に、渋滞検出部25で現在渋滞中であることを検出したとき、カメラ撮影画像を非表示にしても良い。但し、渋滞検出時には非表示にすることなく、逆に作動閾値の車速値を上昇させ、非表示を遅めに設定することもでき、これらは必要に応じて任意に設定する。
【0068】
更に、図1のカメラ撮影画像非表示指示部18における表示後所定時間経過検出部22で、図2のステップS3でカメラ撮影画像を表示した後、例えば3分等の所定時間が経過したことを検出したときに、ステップS10でカメラの撮影画像を非表示にする態様を加えても良い。
【0069】
ステップS9で車速はカメラ撮影画像非表示作動閾値(U)を未だ越えていないと判別したときには、ステップS3に戻ってカメラの撮影画像を表示する状態を継続し、前記各種作動を繰り返す。それに対してステップS9で車速はカメラ撮影画像非表示作動閾値(U)を越えたと判別したときには、カメラ撮影画像を非表示にする(ステップS10)。この時に例えばこの車両の出発当初にナビゲーション画面を表示していたときには、再びナビゲーション画面に切り換えられる。その後ステップS11に進み、例えば図3に示すように、車両走行中におけるカメラ撮影画像非表示の状態から表示するための処理を行う。
【0070】
図3に示す車両走行中のカメラ撮影画像非表示からの表示処理の例においては、最初車両走行中におけるカメラ撮影画像非表示領域に存在する状態から(ステップS21)、現在走行している道路の属性を検出する(ステップS22)。この作動は前記図2のステップS4と同様の作動を行うので、詳細な説明は省略する。以降の作動においても図2と同様の作動を行うときは、同様に詳細な説明は省略する。
【0071】
その後ステップS23において、現在の走行道路属性に応じたカメラ画像表示用標準閾値(Lb)を読み込む。この作動は図1のカメラ撮影画像表示非表示標準閾値設定部50において予め設定している、表示用標準閾値(Lb)を読み込むことにより行う。この表示用標準閾値(Lb)については、図2のステップS5においては、高速道路では非表示用標準閾値を50km/hとした時には表示標準閾値を40km/hとし、一般道では非表示標準閾値を20km/hとしたときには表示用標準閾値を15km/hとし、細街路で非表示用標準閾値を12km/hとしたときには表示用標準閾値を8km/hに設定する等、非表示標準閾値は常に表示標準閾値よりもく高速側に設定しておく。次いで車両の走行環境に応じたカメラ撮影画像表示閾値調整値(±y)を設定する。この作動は図1のカメラ撮影画像表示非表示閾値調整値設定部53において、表示用調整値(±y)を設定することにより行う。
【0072】
次いで図3の例においては、利用者がカメラ撮影画像の表示指示を行ったか否かを判別している(ステップS25)。この作動は図1のカメラ撮影画像表示指示部26における、利用者表示指示検出部28で、利用者が手動スイッチを操作する等によって強制的にカメラ撮影画像を表示させる指示を検出することにより行う。ステップS25で利用者がカメラ撮影画像の表示指示を行ったと判別したときには、ステップS27においてカメラ撮影画像を表示する。この時には、モニタに各種の画像を表示している状態でも、カメラ撮影画像表示に切り換えることにより行う。
【0073】
ステップS25で利用者がカメラ撮影画像の表示指示を行っていないと判別したときには、車速はカメラ撮影画像表示作動閾値(L=Lb±y)以下になったか否か、即ちカメラ撮影画像表示作動閾値を越えて車速が低下したか否かを判別する。この判別は図1のカメラ撮影画像表示指示部26における、表示作動閾値越え検出部27で行っている。
【0074】
このステップS26において、作動閾値以下になっていないと判別したときには、ステップS22に戻って前記作動を繰り返す。それに対してステップS26で作動閾値以下になったと判別したときには、カメラ撮影画像を表示し(ステップS27)、その後ステップS28において図2のステップS4へ戻り、カメラ撮影画像を表示している状態での前記作動を行い、カメラ撮影画像の表示継続、及び非表示処理等の処理を行い、それ以降は図2及び図3の作動によって連続して作動させることができる。
【0075】
本発明は上記のような作動を行うことにより、例えば図5(c)に本発明のカメラ撮影画像表示非表示作動例を示すように、同図(a)に示すような道路属性から得られたカメラ撮影画像表示非表示標準閾値(Ub)(Lb)と、同図(b)に示すような走行環境に対応して得られたカメラ撮影画像表示非表示閾値調整値(±x)(±y)の設定によって、表示作動閾値(L=Lb±y)と非表示作動閾値(U=Ub±x)が求まり、この範囲がヒステリシス域となる。
【0076】
その結果、図5(c)の例では最初時刻t0から発車するとき、時刻と共に車速が上昇し、表示作動閾値(L)を越えてヒステリシス域に入り、更に非表示作動閾値(U)を越えた時刻t1において、カメラ撮影画像が非表示となる。その後図示の例では車速が低下し、表示作動閾値(U)より低下してヒステリシス域に入り、非表示作動閾値(L)を越えて車速が低下した時刻t2において、カメラ撮影画像を表示する。その後車速が上昇し表示作動閾値(L)を越えてヒステリシス域に入っても、非表示作動閾値(U)を越えて上昇することがないのでカメラ撮影画像は表示のまま維持され、従来のような車速の変化によって頻繁にナビゲーション画面とカメラ撮影画像とが切り換わることが無くなる。
【0077】
図5(c)の例では時刻t3の時に、例えば図1の前方交差点検出部42で、図4(b)に示すような交差点を検出した場合には、非表示作動閾値を引き上げるとともに、図示の例では同様に表示作動閾値も引き上げる。それによりカメラ撮影画像を表示する範囲が広くなり、フロントカメラを用いた安全走行が確実に行われるようになる。図5(c)に示す例においてはその後時刻t4において、前記のように走行環境の変化により引き上げられた非表示作動閾値(U)を越えるとき、カメラ撮影画像を非表示とする。その後図示されていない時間領域でこの交差点を過ぎると、再び走行環境検出部でこれを検出し、元の作動閾値となる。
【0078】
前記実施例においては、カメラ撮影画像表示非表示作動閾値設定部56での作動閾値の設定に際して、カメラ撮影画像表示非表示標準閾値設定部50で設定した標準閾値に対して、カメラ撮影画像表示非表示閾値調整値設定部53で設定した閾値調整値をプラスマイナスすることによって調整を行うようにした例を示したが、そのほか標準閾値に対して閾値調整値を係数として乗じるようにしても実施することができる。
【0079】
更に、本発明の作動に際してこのような演算を逐次行うことなく、予め各種の標準閾値についてそれぞれ、予め考えられる各種の走行環境に応じて調整した作動閾値をマトリックス状データとして記録しておき、走行環境の変化等によって任意のデータを読み取ることにより実施することもできる。この場合も道路属性に応じた標準閾値に対して、各種状態を加味する走行環境によりその閾値を調整した作動閾値のデータを利用していることには変わりはない。
【0080】
また、前記実施例において非表示作動閾値は表示作動閾値よりも高い車速に設定し、非表示作動閾値と表示作動閾値との間をヒステリシス域に設定した例を示したが、逆に非表示作動閾値は表示作動閾値よりも低い車速設定することもできる。この実施の態様のときには、車両がカメラ撮影画像表示速度以上の速度から減速していくとき、早めにカメラ撮影画像を表示できるようになる。但しその場合は、車速がカメラ撮影画像非表示速度以下にならずにカメラ撮影画像表示車速以上になったときにはその時カメラ撮影画像を非表示にする。またこの実施の態様のときには、車両がカメラ撮影画像非表示速度以下の速度から加速していくとき、早めにカメラ撮影画像を非表示にできるようにもなる。但しその場合は、車速がカメラ撮影画像表示速度以上にならずに再びカメラ撮影画像非表示速度以下になったときには、その時カメラ撮影画像を表示する。また、このような作動態様は、前記非表示作動閾値を表示作動閾値よりも高い車速に設定することによりヒステリシス領域を設ける態様と、車両の走行環境等によって任意に切り換えるように設定することも可能である。
【符号の説明】
【0081】
11 ナビゲーション装置 12 外部情報取込部
13 渋滞検出部 14 渋滞
15 混雑 16 空き道路
17 車速検出部 18 カメラ撮影画像非表示指示部
20 非表示作動閾値越え検出 21 利用者非表示指示検出
22 表示後所定時間経過検出 23 停車後所定時間経過検出
24 エンジンOFF後所定時間経過検出 25 渋滞検出
26 カメラ撮影画像表示指示部 27 表示作動閾値越え検出部
28 利用者表示指示検出部 30 走行道路属性検出部
31 道路種別 32 高速道路
33 有料道路 34 国道
35 一般道路 36 細街路
37 現在走行道路 38 走行予定前方道路
40 走行環境検出部 41 前方カーブ検出
42 前方交差点検出 43 前方駐車場進入検出
44 前方道路交差検出 45 前方事故多発地点検出
46 前方ナビゲーション案内地点検出 47 モニタ表示画像選択部
50 カメラ撮影画像表示非表示標準閾値設定部 51 非表示用標準閾値
52 表示用標準閾値 53 カメラ撮影画像表示非表示閾値調整値設定部
54 非表示用調整値 55 表示用調整値
56 カメラ撮影画像表示非表示作動閾値設定部 57 非表示作動閾値
58 表示作動閾値 60 車両
61 フロントカメラ 62 モニタ
【特許請求の範囲】
【請求項1】
走行する道路の属性を検出する走行道路属性検出手段と、
走行道路属性に対応して、カメラ撮影画像の表示標準閾値と非表示標準閾値を設定するカメラ撮影画像表示非表示標準閾値設定手段と、
前記表示標準閾値及び非表示標準閾値によって、実際にカメラ撮影画像を表示作動するための表示作動閾値と、カメラ撮影画像を非表示作動するための非表示作動閾値とを設定するカメラ撮影画像表示非表示作動閾値設定手段と、
前記非表示作動閾値と、現在の車速を検出する車速検出手段から取り込んだ現在の車速とを比較し、現在の車速が非表示作動閾値よりも低い状態から高くなったとき、カメラの撮影画像の表示を非表示とする指示を行うカメラ撮影画像非表示指示手段と、
前記表示作動閾値と、前記現在の車速とを比較し、現在の車速が表示作動閾値よりも高い状態から低くなったとき、カメラの撮影画像を表示するカメラ撮影画像表示指示手段とを備えたことを特徴とするカメラ撮影画像表示装置。
【請求項2】
車両の走行環境を検出する走行環境検出手段と、
走行環境に対応して、前記表示標準閾値と非表示標準閾値とを調整するための、表示閾値調整値及び非表示閾値調整値を設定するカメラ撮影画像表示非表示閾値調整値設定手段とを備え、
前記カメラ撮影画像表示非表示作動閾値設定手段は、前記表示標準閾値及び非表示標準閾値と、前記表示閾値調整値及び非表示閾値調整値とによって、実際にカメラ撮影画像を表示作動するための表示作動閾値と、カメラ撮影画像を非表示作動するための非表示作動閾値とを設定することを特徴とする請求項1記載のカメラ撮影画像表示装置。
【請求項3】
前記走行環境の検出に際しては、前方にカーブが存在することを検出する前方カーブ検出、前方に交差点が存在することを検出する前方交差点検出、走行中の道路の前方は駐車場に進入することを検出する前方駐車場進入検出、高速道路走行中において前方に道路交差が存在することを検出する前方道路交差検出、前方に事故多発地点が存在することを検出する前方事故多発地点検出、前方にナビゲーション装置による誘導経路案内地点が存在することを検出する前方ナビゲーション案内地点検出、現在道路が渋滞していることを検出する渋滞検出、のいずれかの検出、或いはこれらの検出の組み合わせにより走行環境を検出し、前記表示作動閾値または非表示作動閾値を変化することを特徴とする請求項2記載のカメラ撮影画像表示装置。
【請求項4】
前記表示作動閾値及び非表示作動閾値は、前記走行道路の属性に応じた標準閾値に対して、前記閾値調整値を加減算することにより、または前記閾値調整値を標準閾値に対して係数として乗ずることにより、或いは前記加減算または係数を乗じた値を予め計算したデータを記録しておき、これを現在の走行環境に対応して読み込むことにより求めることを特徴とする請求項2記載のカメラ撮影画像表示装置。
【請求項5】
前記走行環境の検出は、車両外部と通信を行う外部情報取込部の情報を用いて行うことを特徴とする請求項2記載のカメラ撮影画像表示装置。
【請求項6】
前記非表示作動閾値は表示作動閾値よりも高い車速に設定し、前記非表示作動閾値と表示作動閾値との間をヒステリシス域に設定したことを特徴とする請求項1記載のカメラ撮影画像表示装置。
【請求項7】
前記表示作動閾値または非表示作動閾値は、運転者の特性によって任意に変化させることを特徴とする請求項1記載のカメラ撮影画像表示装置。
【請求項8】
前記カメラの撮影画像表示時には、利用者が非表示にする指示を検出する利用者非表示指示検出、カメラ撮影画像表示後所定時間が経過したことを検出する表示後所定時間経過検出、車両停車後所定時間が経過したことを検出する停車後所定時間経過検出、エンジンをOFFしてから所定時間が経過したことを検出するエンジンOFF後所定時間経過検出、現在走行している道路が渋滞していることを検出する渋滞検出、のいずれかの検出時にカメラ撮影画像を非表示にすることを特徴とする請求項1記載のカメラ撮影画像表示装置。
【請求項1】
走行する道路の属性を検出する走行道路属性検出手段と、
走行道路属性に対応して、カメラ撮影画像の表示標準閾値と非表示標準閾値を設定するカメラ撮影画像表示非表示標準閾値設定手段と、
前記表示標準閾値及び非表示標準閾値によって、実際にカメラ撮影画像を表示作動するための表示作動閾値と、カメラ撮影画像を非表示作動するための非表示作動閾値とを設定するカメラ撮影画像表示非表示作動閾値設定手段と、
前記非表示作動閾値と、現在の車速を検出する車速検出手段から取り込んだ現在の車速とを比較し、現在の車速が非表示作動閾値よりも低い状態から高くなったとき、カメラの撮影画像の表示を非表示とする指示を行うカメラ撮影画像非表示指示手段と、
前記表示作動閾値と、前記現在の車速とを比較し、現在の車速が表示作動閾値よりも高い状態から低くなったとき、カメラの撮影画像を表示するカメラ撮影画像表示指示手段とを備えたことを特徴とするカメラ撮影画像表示装置。
【請求項2】
車両の走行環境を検出する走行環境検出手段と、
走行環境に対応して、前記表示標準閾値と非表示標準閾値とを調整するための、表示閾値調整値及び非表示閾値調整値を設定するカメラ撮影画像表示非表示閾値調整値設定手段とを備え、
前記カメラ撮影画像表示非表示作動閾値設定手段は、前記表示標準閾値及び非表示標準閾値と、前記表示閾値調整値及び非表示閾値調整値とによって、実際にカメラ撮影画像を表示作動するための表示作動閾値と、カメラ撮影画像を非表示作動するための非表示作動閾値とを設定することを特徴とする請求項1記載のカメラ撮影画像表示装置。
【請求項3】
前記走行環境の検出に際しては、前方にカーブが存在することを検出する前方カーブ検出、前方に交差点が存在することを検出する前方交差点検出、走行中の道路の前方は駐車場に進入することを検出する前方駐車場進入検出、高速道路走行中において前方に道路交差が存在することを検出する前方道路交差検出、前方に事故多発地点が存在することを検出する前方事故多発地点検出、前方にナビゲーション装置による誘導経路案内地点が存在することを検出する前方ナビゲーション案内地点検出、現在道路が渋滞していることを検出する渋滞検出、のいずれかの検出、或いはこれらの検出の組み合わせにより走行環境を検出し、前記表示作動閾値または非表示作動閾値を変化することを特徴とする請求項2記載のカメラ撮影画像表示装置。
【請求項4】
前記表示作動閾値及び非表示作動閾値は、前記走行道路の属性に応じた標準閾値に対して、前記閾値調整値を加減算することにより、または前記閾値調整値を標準閾値に対して係数として乗ずることにより、或いは前記加減算または係数を乗じた値を予め計算したデータを記録しておき、これを現在の走行環境に対応して読み込むことにより求めることを特徴とする請求項2記載のカメラ撮影画像表示装置。
【請求項5】
前記走行環境の検出は、車両外部と通信を行う外部情報取込部の情報を用いて行うことを特徴とする請求項2記載のカメラ撮影画像表示装置。
【請求項6】
前記非表示作動閾値は表示作動閾値よりも高い車速に設定し、前記非表示作動閾値と表示作動閾値との間をヒステリシス域に設定したことを特徴とする請求項1記載のカメラ撮影画像表示装置。
【請求項7】
前記表示作動閾値または非表示作動閾値は、運転者の特性によって任意に変化させることを特徴とする請求項1記載のカメラ撮影画像表示装置。
【請求項8】
前記カメラの撮影画像表示時には、利用者が非表示にする指示を検出する利用者非表示指示検出、カメラ撮影画像表示後所定時間が経過したことを検出する表示後所定時間経過検出、車両停車後所定時間が経過したことを検出する停車後所定時間経過検出、エンジンをOFFしてから所定時間が経過したことを検出するエンジンOFF後所定時間経過検出、現在走行している道路が渋滞していることを検出する渋滞検出、のいずれかの検出時にカメラ撮影画像を非表示にすることを特徴とする請求項1記載のカメラ撮影画像表示装置。
【図1】


【図2】
【図3】

【図4】
【図5】

【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−105142(P2011−105142A)
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【出願番号】特願2009−262362(P2009−262362)
【出願日】平成21年11月17日(2009.11.17)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【出願日】平成21年11月17日(2009.11.17)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]