
カメラ支持装置
【課題】プロ用ビデオカメラを反復可能な位置へ精密位置調整する。
【解決手段】駆動列手段1と、駆動列手段10の回転出力手段11に装着された第1誘導位置センサ23,14と、駆動列手段1に動作接続された回転入力デバイス4に装着された第2誘導位置センサ2,3とを包含し、第1位置センサ23,14により検知されるインダクタンスが回転出力手段11の回転変位を表して、第2位置センサ2,3により検知されるインダクタンスが回転入力デバイス4の回転変位を表す、ビデオカメラを支持するためのカメラ支持装置である。
【解決手段】駆動列手段1と、駆動列手段10の回転出力手段11に装着された第1誘導位置センサ23,14と、駆動列手段1に動作接続された回転入力デバイス4に装着された第2誘導位置センサ2,3とを包含し、第1位置センサ23,14により検知されるインダクタンスが回転出力手段11の回転変位を表して、第2位置センサ2,3により検知されるインダクタンスが回転入力デバイス4の回転変位を表す、ビデオカメラを支持するためのカメラ支持装置である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、カメラ支持装置、特にテレビカメラその他など、支持されたプロ用カメラの精密位置調整のための位置センサを備える駆動列を具備するカメラ支持体に関連する。
【0002】
本出願の文章において、「カメラ架台」の語は、手動式と自動式(つまりロボット手段を介して)のいずれかにより制御される架台、ドリー(移動式撮影機台)、三脚などのカメラ支持体をすべて規定する。
【背景技術】
【0003】
支持されたプロ用ビデオカメラを反復可能な位置へ精密位置調整するという問題は周知である。周知の駆動ユニットは、使用時にテレビ/映画産業ではロボット式パンアンドチルトヘッド、ロボット式架台、手動式パン/チルトヘッド、または手動式架台に一般的に具備される駆動列ユニットの入力シャフトおよび/または出力シャフトの絶対位置調整のための正確なデータ解像度レベルを提供するのに、少なくとも二つの光学エンコーダを必要とする。
【0004】
第二の問題は、支持されたプロ用ビデオカメラの位置を高い正確度で測定することであり、周知の解決法では光学エンコーダの使用を必要とする。
【0005】
さらに、カメラ支持体とともに光学エンコーダを使用することは、以下の短所を有している。
汚れおよび湿度に影響されやすいため、設置されるカメラ支持機器も汚れおよび湿度に影響されやすくなる。これは、カメラ支持機器に必要とされる維持費を上げるとともに、カメラ支持機器のための関連の長期コストも上昇させる。
軸方向の不整合に影響されやすく、関連のカメラ支持機器の製造を複雑にする。
衝撃および振動に影響されやすく、関連のカメラ支持機器の頑強性を低下させる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許出願公開第2005−154549号明細書
【特許文献2】米国特許第5598207号明細書
【特許文献3】米国特許第5220848号明細書
【特許文献4】米国特許第4233634号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、これらの問題に対する救済策または解決法を提供しようとする。
【課題を解決するための手段】
【0008】
第一の広範囲独立態様において、本発明は、駆動列手段と、駆動列手段の回転出力手段に装着された第1誘導位置センサと、駆動列手段に動作接続された回転入力デバイスに装着された第2誘導位置センサとを包含して、第1位置センサにより検知されるインダクタンスが回転出力手段の回転変位を表し、第2位置センサにより検知されるインダクタンスが回転入力デバイスの回転変位を表す、ビデオカメラを支持するためのカメラ支持装置を提供する。
【0009】
この構成の長所は、カメラ支持体に具備される駆動列ユニットの入力シャフトと出力シャフトの両方の回転変位を判断する正確な手段を提供することである。駆動列ユニットの入力および出力の両方のシャフトの位置調整は、駆動列ユニットの入力シャフトおよび出力シャフトに位置する誘導センサの両方により検知されるインダクタンスを変化させる。インダクタンスが検知される磁場は連続的であって、各シャフトの絶対的回転位置を判断するための高解像度データを提供する。そのため、電動モータなどの回転入力デバイスからの回転入力を制御システムが所定量だけ調節することができると、出力シャフトが正しい位置へ確実に回転し、その後で、支持されたビデオカメラが正確な反復可能位置へ位置調整される。
【0010】
第1誘導位置センサがさらに、受動的誘導部材である第1主要部材と、複数の巻線を具備する能動部材である第2主要部材とを包含し、使用時に、回転測定経路に沿って変位した受動的誘導部材の位置を巻線のインダクタンスが表すことが好ましい。この構成では、第1誘導センサが駆動列ユニットの出力に配置される。第2主要部材の巻線は、磁場における受動的第1主要部材の相対回転位置を表す高解像度データを出力するためのアンテナとして機能する磁場を提供する。
【0011】
第1誘導位置センサの第1主要部材は、駆動列手段の最終駆動要素に装着される回転子であることが好ましい。こうして、駆動列ユニットの最終駆動要素に装着された時にセンサの第2主要部材の磁場における最終駆動列要素の回転変位を正確に追跡する受動的な第1主要部材をロータに形成することにより、駆動列ユニットの出力シャフトの回転変位を第1誘導センサが判断することができる。
【0012】
第1誘導位置センサの第2主要部材は、使用時に駆動列手段をパンアンドチルトヘッドに装着する支持部材に装着されたステータであることが好ましい。こうして、ステータを定位置に維持して、駆動列ユニットの出力シャフトに装着されたロータのアンテナ磁場における回転変位を検知するアンテナ磁場を発生させる支持部材にステータを装着することにより、駆動列ユニットの出力シャフトの回転変位を第1誘導センサが判断して、回転経路に沿ったセンサのロータの回転変位を正確に表すデータをセンサが出力することができる。
【0013】
カメラ支持装置はさらに、駆動列手段の最終駆動要素と第1誘導位置センサの第1主要部材との間に配置された第1非金属スペーサを包含する。この構成は、歯車駆動装置である最終駆動要素の金属塊が、ロータの位置を検出するのにエンコーダが使用する磁場に影響を与えることを回避する。プラスチックスペーサは、第1エンコーダのロータと歯車駆動装置とを分離する。
【0014】
カメラ支持装置がさらに、支持部材と第1誘導位置センサの第2主要部材との間に配置された第2非金属スペーサを包含することが好ましい。こうして、支持部材の主要部の金属塊が、ロータの位置を検出するのに第1エンコーダが使用する磁場に影響を与えることを回避する。ステータと支持部材の主要部とを分離するのに、プラスチックスペーサが使用される。
【0015】
第2誘導位置センサがさらに、受動的誘導部材である第1主要部材と、複数の巻線を具備する能動部材である第2主要部材とを包含し、使用時に、回転測定経路に沿って変位した誘導部材の位置を巻線のインダクタンスが表すことが好ましい。この構成では、第2誘導センサが駆動列ユニットの入力に配置される。第2主要部材の巻線は、磁場における受動的第1主要部材の相対回転位置を表す高解像度データを出力するアンテナとして機能する磁場を形成する。
【0016】
第2誘導位置センサの第1主要部材は、回転入力デバイスに装着されたロータであることが好ましい。こうして、回転入力デバイスつまり電動モータに装着された時に入力駆動シャフトの回転変位を正確に追跡する受動的第1主要部材をロータに形成することにより、第2誘導センサが駆動列ユニットの入力シャフトの回転変位を判断することができる。
【0017】
第2誘導位置センサの第2主要部材が、駆動列手段に装着された第2支持部材に装着されるステータであることが好ましい。こうして、ステータを定位置に維持して、アンテナ磁場内で回転入力デバイスに装着されたロータの回転変位を検知する磁場を発生させるカメラ支持装置にステータを装着することにより、駆動列ユニットからの入力シャフトの回転変位を第2誘導センサが判断して、回転経路に沿ったセンサのロータの回転変位を正確に表すデータをセンサが出力することができる。
【0018】
第2誘導位置センサの第1主要部材と回転入力デバイスとの間に配置された第3非金属スペーサをカメラ支持装置がさらに包含することが好ましい。この構成は、回転入力デバイスつまり電動モータにより発生される電磁場が、モータに装着されたロータの位置を検出するのにエンコーダが使用する磁場に影響を与えることを防止する。
【0019】
パンアンドチルトヘッドを駆動および支持する方法がさらに、上述したカメラ支持装置を包含することが好ましい。
【0020】
ビデオカメラを支持するためのパンアンドチルトヘッド装置がさらに、上述したカメラ支持装置を包含することが好ましい。
【0021】
ビデオカメラを支持するためのロボット式架台装置がさらに、上述したカメラ支持装置を包含することが好ましい。
【0022】
ビデオカメラを支持するための手動式架台装置がさらに、上述したカメラ支持装置を包含することが好ましい。
【0023】
第二の広範囲独立態様において、本発明は、使用時にビデオカメラを支持するカメラ支持装置を提供し、支持されたカメラを軸に沿って移動させる手段と、装置に装着される誘導位置センサとをこの装置が包含し、位置センサにより検知されるインダクタンスが、支持されたカメラの変位を表す。
【0024】
この構成では、誘導センサにより検知される1本の軸上の自由移動をカメラ支持装置が行うことができ、検知されるインダクタンスはこの軸に沿ったカメラの変位を表している。出力エンコーダは、固定プレートにより、または架台そのものの移動により変位したカメラの絶対位置を判断および/または測定する。回転位置は度数で測定される。これは、この軸に沿ったパンアンドチルトヘッドの絶対位置を測定および判断するのに、特に好都合である。または代替的に、ロボットナビゲーションなどの用途では、車輪の絶対位置、および架台支持体の支持車輪/駆動車輪が移動した増加距離が判断されて、床における架台の位置が計算される。
【0025】
カメラ支持装置がさらに、回転運動の回転速度を駆動段の間で低下させることにより、各駆動段の入力に印加されるトルクを各駆動段の出力での上昇トルクに変換するために一緒に結合された各連続駆動段を具備し、連続駆動段の一つが歯車駆動装置を具備する駆動列をさらに包含して、ベルト駆動装置を具備する別の段が歯車駆動装置の前に設けられることを特徴とすることが好ましい。この構成は、支持されたカメラから離れて配置されたオーディオ機器にピックアップされないように高速の回転速度を駆動装置に静かに伝達する手段を提供する。
【0026】
カメラ支持装置がさらに、駆動列に動作接続された回転入力デバイスに装着される第2位置センサを包含して、この第2センサにより検知される位置が、回転測定経路に沿った入力デバイスの回転変位を表すことが好ましい。この構成の長所は、カメラ支持装置に具備される駆動列ユニットの入力シャフトの回転変位を判断する正確な手段を提供することである。入力シャフトの回転位置は、駆動列ユニットの入力シャフトに位置する第2位置センサにより検知される回転位置である。第2位置センサは、入力シャフトの絶対回転位置を判断するための高解像度データを提供する。そのため、出力シャフトが正しい位置へ確実に回転し、続いて、支持されたビデオカメラを正確な反復可能位置へ位置調整するように、制御システムが電動モータなどの回転入力デバイスからの回転入力を所定量だけ調節することができる。
【0027】
誘導センサがさらに、受動的誘導部材である第1主要部材と、複数の巻線を具備する能動部材である第2主要部材とを包含して、使用時に、回転測定経路に沿って変位した受動部材の位置を巻線のインダクタンスが表すことが好ましい。この構成では、誘導センサが駆動列ユニットの出力に配置される。第2主要部材の巻線は、磁場における受動的第1主要部材の相対回転位置を表す高解像度データを出力するためのアンテナとして機能する磁場を提供する。
【0028】
誘導位置センサの第1主要部材が、駆動列手段の最終駆動要素に装着されるロータであることが好ましい。こうして、駆動列ユニットの最終駆動要素に装着された時に、センサの第2主要部材の磁場における最終駆動列要素の回転変位を正確に追跡する受動的第1主要部材をロータに形成することにより、駆動列ユニットの出力シャフトの回転変位を誘導センサが判断することができる。
【0029】
第1誘導センサの第2主要部材が、使用時に駆動列を装置に装着する支持部材に装着されるステータであることが好ましい。こうして、ステータを定位置に維持して、アンテナ磁場内で駆動列ユニットの出力シャフトに装着されたロータの回転変位を検知するアンテナ磁場を発生させる支持部材にステータを装着することにより、駆動列ユニットの出力シャフトの回転変位を誘導センサが判断することができ、回転経路に沿ったセンサのロータの回転変位を正確に表すデータをセンサが出力できる。
【0030】
パンアンドチルトヘッドが上記の装置を包含し、支持されたカメラの垂直軸を中心とする回転変位が、回転測定経路に沿って検知されることが好ましい。この構成では、360度パノラマ軸に沿って、支持されたカメラを変位させることができる。
【0031】
パンアンドチルトヘッドが上記の第2装置を包含して、支持されたカメラの水平軸を中心とする回転変位が回転測定経路に沿って検知されることが好ましい。この構成では、支持されたカメラが垂直軸に沿って変位することが可能である。
【0032】
カメラ架台が上記の装置を包含することが好ましい。この構成では、トラック上を移動した距離を架台が測定できる。
【0033】
カメラ架台が上記の装置を包含し、接地部材の回転変位が回転測定経路に沿って検知されることが好ましい。架台は、車輪などの接地部材を検知して、架台の変位を量化する。
【0034】
クレーンが上記の装置を包含し、水平軸を中心とするクレーンアームの回転変位が回転測定経路に沿って検知されることが好ましい。この構成では、垂直軸に沿ったクレーンアームの変位をクレーンが量化できる。
【0035】
クレーンが上記の装置を包含し、垂直軸を中心とするクレーンアームの回転変位が回転測定経路に沿って検知されることが好ましい。この構成では、水平軸に沿ったクレーンアームの変位をクレーンが量化できる。
【図面の簡単な説明】
【0036】
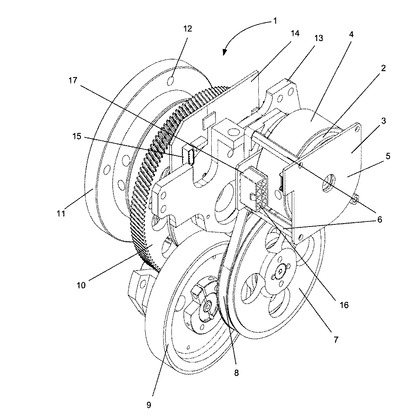
【図1】二つのエンコーダを具備する駆動列ユニットの斜視図を示す。
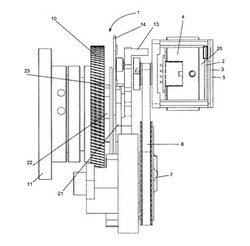
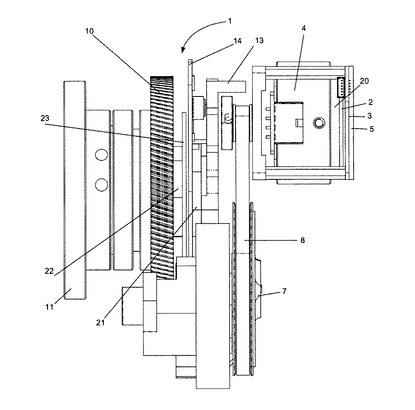
【図2】二つのエンコーダを具備する駆動列ユニットの側面図を示す。
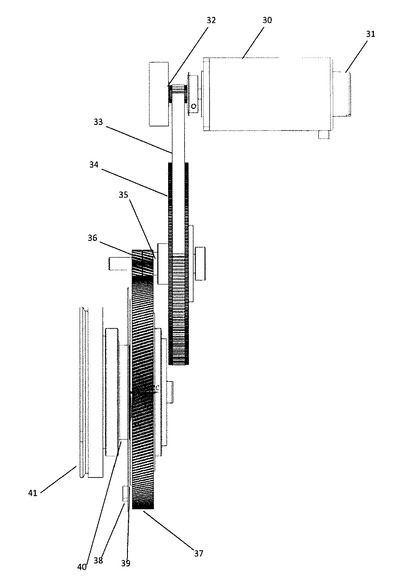
【図3】二つのエンコーダを具備する駆動ユニットの代替的実施形態の側面図を示す。
【図4】二つのエンコーダを具備する駆動ユニットの代替的実施形態の斜視図を示す。
【発明を実施するための形態】
【0037】
図1は、全体が1と記された駆動列ユニットの斜視図を示している。駆動列システム1は、入力モータ4の回転部材に装着されたロータ2を具備する入力エンコーダを有する。入力エンコーダは、駆動列ユニット1に結合された入力モータ4の支持部材5に装着されるステータ部材3を含む。支持部材5を入力モータ4から離間させる長尺の六角形支持部材6を介して、支持部材5が駆動列ユニット1に装着されている。
【0038】
入力モータ4は、駆動ベルト8により駆動されるプーリである第1駆動要素7に結合されている。第1駆動要素7は続いて、摩擦駆動プーリである第2駆動要素9を駆動する。そして第2駆動要素9は、歯車である第3駆動要素10に結合されている。第3駆動要素10は、三脚、架台、その他などのカメラ支持体への駆動列の装着を容易にする円形固定プレート11に結合されている。固定プレート11は、駆動列をカメラ支持体に装着するための固定孔12の列を備える円形フランジを具備している。
【0039】
駆動列ユニット1の支持部材13は、最終駆動要素10に装着されている。出力エンコーダのステータ14は、最終駆動要素10に面する支持部材13の表面に装着されている。出力エンコーダのステータ14は、電気コネクタ15を具備するプリント回路基板から形成される。支持部材13は、支持表面または部材への駆動列ユニットの装着を可能にする90°屈曲部を備える「L字」固定ブラケットも具備する。
【0040】
駆動ユニット1に結合された入力モータ4の端部に装着された第2プリント回路基板17には、第2電気コネクタ16が取り付けられている。
【0041】
図2は、駆動列システム1の側面図を示している。入力エンコーダのステータ3は、駆動列ユニット1に結合されていない入力モータ4の一端部に装着された支持部材5の内側表面に装着されている。入力エンコーダのロータ2と入力モータ4との間には、プラスチックスペーサ20が配置されている。入力モータ4は、駆動ベルト8を介して第1駆動要素7に結合されている。
【0042】
出力エンコーダのステータ14は、第3駆動要素10に面する支持部材13の内側表面に装着されている。プラスチック材料製の非金属スペーサ21が、出力エンコーダのステータ14と支持部材13の表面との間に配置されている。出力エンコーダのロータ23は、出力歯車駆動装置10に装着されている。出力エンコーダのロータ23と歯車出力駆動要素10との間には、プラスチック材料製の第2非金属スペーサ22が形成されている。
【0043】
使用時には、アンテナとして機能する入力エンコーダのステータの巻線により発生される磁場により、入力エンコーダのロータの回転運動が検知される。ステータに具備されている巻線のインダクタンスは、回転経路上を動いているロータの回転位置に比例して変化する。そのため、入力モータのシャフトの絶対位置が判断される。
【0044】
駆動列は、入力モータからの回転運動を第1駆動要素に伝達する。続いて第1駆動要素は、一般的には摩擦駆動装置である第2駆動要素を駆動する。摩擦駆動装置は続いて、一般的には出力歯車駆動装置である第3駆動要素を駆動する。歯車駆動装置は高トルクの回転運動を、装着された固定プレートに付与し、このプレートはカメラ支持体に装着されている。
【0045】
歯車出力駆動要素は、静止ステータと協働する受動ロータを有する出力エンコーダを有する。出力エンコーダのロータの回転運動は、アンテナとして機能する出力エンコーダのステータの巻線により発生される磁場によって検知される。駆動モータの回転位置に対する固定プレートの回転位置を判断するため最終駆動要素に装着されたロータの回転位置に比例して、ステータ内の巻線のインダクタンスが変化する。
【0046】
そのため、出力エンコーダは固定プレートの絶対的な回転位置を判断/測定する。回転位置は度数で測定される。起動時に入力エンコーダは、ゼロ値にリセットされた後で、入力モータからの入力回転に従って増減される。入力エンコーダの増分値を増減することにより、モータは周知の位置に正しく位置調整される。
【0047】
駆動ユニットに誘導エンコーダを使用する長所は、
エンコーダは、大径シャフトに嵌着可能であるので、太くて硬いシャフトを使用して剛性を最大にすることができる。これは、映画およびスタジオエリアで使用するためのパン/チルトヘッド、架台、または他のカメラ支持機器の剛性にとって有益である。
エンコーダは軸方向の寸法が小さい。これは、映画およびスタジオエリアで使用するためのパンアンドチルトヘッド、架台、または他のカメラ支持機器のパッケージングにとって有益である。
誘導エンコーダは、光学エンコーダ技術ほど軸方向の不整合に影響されない。組立を容易にするのは確実であるので、これは有益である。
誘導エンコーダは、光学エンコーダ技術ほど汚れおよび湿度に影響されない。映画およびスタジオエリアで使用するためのパン/チルトヘッド、架台、または他のカメラ支持機器が環境条件に影響されないので、これは有益である。
映画およびスタジオエリアでの使用のためのパン/チルトヘッド、架台、または他のカメラ支持機器に必要とされるスムーズで正確かつ反復可能な動きに必要な、高解像度の絶対位置データを提供する。光学エンコーダの使用では、従来、同レベルの解像度と絶対位置を達成するには、二つの光学エンコーダを嵌着しなければならなかった。絶対位置のための低解像度のエンコーダを一つと、高解像度だが動きが増分的である第2エンコーダ。
コスト効果の高いエンコーダ解決法は、製品全体のコストの最小化に役立つ。
低質量設計は、製品全体の重量の最小化に役立つ。
衝撃および振動に対して機械的に強いので、製品全体の頑強性を向上させる。
【0048】
本発明の代替的実施形態において、ビデオカメラは支持装置によって保持および支持される。支持装置は、支持されたカメラの1本の自由軸に沿った移動(自由移動)を許容し、自由軸に沿った移動を検知する誘導位置センサも具備する。誘導センサにより検知されるインダクタンスは、自由軸に沿ったカメラの変位を表す。変位は、回転変位タイプに典型的なものであればよい。
【0049】
支持装置は一般的に、パンアンドチルト軸の絶対位置を測定および判断する誘導センサを具備するパンアンドチルトヘッド(手動式および/またはロボット式)でよい。
【0050】
あるいは代替的に、支持装置が一般的に、架台の支持車輪により移動するステアリングの絶対位置および増分距離を測定および判断するため誘導センサを具備する支持架台(手動式/および/またはロボット式)であってもよい。絶対位置は、フロア上での架台位置を計算および判断するのに使用されるとともに、ロボットナビゲーションなどの用途で使用される。
【0051】
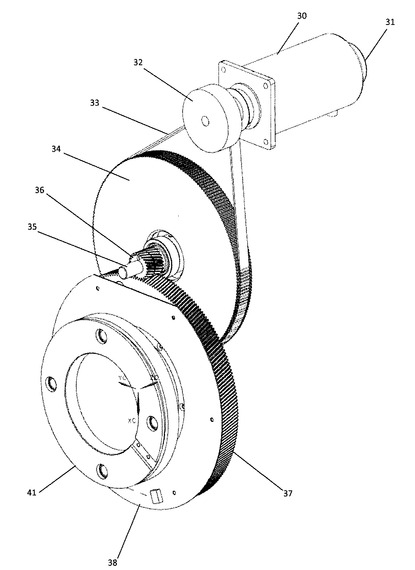
図3は、入力モータ30を具備する駆動列ユニットの側面図を示す。入力モータの一端部に装着されているのは、一般的には光学エンコーダまたはホールセンサである角度位置測定デバイス31である。装着されたセンサと反対の入力モータの端部は、大型プーリ34を駆動するベルト33を駆動する小型プーリ32で構成される第1駆動要素に動作接続されている。小型プーリ32は、入力モータ30にしっかりと接続されている。第1駆動要素は、入力モータ30からのトルクを低下させ、大型プーリ34を介してこれを出力する。
【0052】
第1駆動要素の大型プーリ34の中央から突出する駆動シャフト35は、第2駆動要素の入力に動作接続されている。第2駆動要素は、大型歯車37と係合する小型歯車36で構成される。小型歯車36は、駆動シャフト35にしっかりと接続されている。第2駆動要素は、第1駆動要素からのトルクを低下させ、大型歯車37を介してこれを出力する。
【0053】
第2駆動要素の大型歯車37の中央から突出する駆動シャフト40は、円形固定プレート41に動作接続されている。円形固定プレート41は、三脚、架台、その他などのカメラ支持体への駆動列の装着を容易にする。固定プレート41は、駆動列をカメラ支持体に装着するための固定孔の列を備える円形フランジを具備する。
【0054】
誘導出力エンコーダは、ヘッド(不図示)の主要部に装着されたステータ38と、第2駆動要素の出力を形成する大型歯車37の中央から突出してこの歯車に動作接続されたロータ39とで構成される。
【0055】
図4は、図3に示されたのと同じ駆動列ユニットの斜視図を示している。
【0056】
使用時に、駆動列は入力モータからの回転運動を第1駆動要素へ伝達する。第1駆動要素は続いて、第2駆動要素を駆動する。第2駆動要素は、静止ステータと協働する受動ロータを有する出力エンコーダを有する。出力エンコーダのロータの回転運動は、アンテナとして機能する出力エンコーダのデータの巻線により発生される磁場によって検知される。ステータに具備される巻線の誘導は、固定プレートの回転位置を判断するため最終駆動要素に装着されたロータの回転位置に比例して変化する。
【0057】
そのため、出力エンコーダは固定プレートの絶対回転位置を判断/測定する。回転位置は、やはり度数で測定される。
【0058】
本発明の代替的実施形態は、取り付けられたカメラをパンアンドチルト軸の両方に沿って動かすパン/チルトカメラ取り付けヘッドであり、クレーム記載発明の装置は、パノラマ軸を中心としてカメラを360°動かす駆動列エンコーダである。支持されたカメラをチルト軸を中心として動かすため、実質的に同一であるが別の駆動列エンコーダがヘッドに具備される。
【0059】
本発明の別の実施形態において、トラックに沿った架台の接地車輪の動きを検知してトラック上で移動した距離を測定するロボット式/手動式架台に、駆動列エンコーダが具備される。架台および車輪はロボット手段によって駆動されるか、単なる転動車輪であって架台が手で押し出される。架台は車輪を検知して、それが床の上で移動した距離を測定し、こうして床における位置を導出する。
【0060】
本発明の代替的実施形態では、垂直軸を中心とするクレーンアームの回転を検知するセンサと、水平軸を中心とするクレーンアームの回転を検出するセンサとを具備して、支持されたカメラのX,Y,Z軸上での配向を測定および判断(つまり計算)する駆動列エンコーダが、クレーンに具備される。クレーンアームは、ロボット手段を介して駆動されるか、手で押される。移動範囲を広げるため、トラックまたは架台にクレーンが取り付けられてもよい。
【0061】
本発明の代替的実施形態では、単一軸に沿った移動を制御および測定する駆動装置を備えるカメラ支持機器に駆動列エンコーダが具備されて、単一の誘導センサによって測定が判断されるとよい。
【0062】
本発明の別の代替的実施形態では、測定される必要のある手動制御軸を持つカメラ支持機器に駆動列エンコーダが具備され、単一の誘導センサによって測定が判断される。
【符号の説明】
【0063】
1 駆動列ユニット、2 ロータ、3 ステータ部材、4 入力モータ、5 支持部材、6 六角形支持部材、7 第1駆動要素、8 駆動ベルト、9 第2駆動要素、10 第3駆動要素、11 円形固定プレート、12 固定孔、13 支持部材、14 ステータ、15 電気コネクタ、16 第2電気コネクタ、17 第2プリント回路基板、20 プラスチックスペーサ、21 非金属スペーサ、22 第2非金属スペーサ、23 ロータ、30 入力モータ、31 角度位置測定デバイス、32 小型プーリ、33 ベルト、34 大型プーリ、35 駆動シャフト、36 小型歯車、37 大型歯車、38 ステータ、39 ロータ、40 駆動シャフト、41 固定プレート。
【技術分野】
【0001】
本発明は、カメラ支持装置、特にテレビカメラその他など、支持されたプロ用カメラの精密位置調整のための位置センサを備える駆動列を具備するカメラ支持体に関連する。
【0002】
本出願の文章において、「カメラ架台」の語は、手動式と自動式(つまりロボット手段を介して)のいずれかにより制御される架台、ドリー(移動式撮影機台)、三脚などのカメラ支持体をすべて規定する。
【背景技術】
【0003】
支持されたプロ用ビデオカメラを反復可能な位置へ精密位置調整するという問題は周知である。周知の駆動ユニットは、使用時にテレビ/映画産業ではロボット式パンアンドチルトヘッド、ロボット式架台、手動式パン/チルトヘッド、または手動式架台に一般的に具備される駆動列ユニットの入力シャフトおよび/または出力シャフトの絶対位置調整のための正確なデータ解像度レベルを提供するのに、少なくとも二つの光学エンコーダを必要とする。
【0004】
第二の問題は、支持されたプロ用ビデオカメラの位置を高い正確度で測定することであり、周知の解決法では光学エンコーダの使用を必要とする。
【0005】
さらに、カメラ支持体とともに光学エンコーダを使用することは、以下の短所を有している。
汚れおよび湿度に影響されやすいため、設置されるカメラ支持機器も汚れおよび湿度に影響されやすくなる。これは、カメラ支持機器に必要とされる維持費を上げるとともに、カメラ支持機器のための関連の長期コストも上昇させる。
軸方向の不整合に影響されやすく、関連のカメラ支持機器の製造を複雑にする。
衝撃および振動に影響されやすく、関連のカメラ支持機器の頑強性を低下させる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許出願公開第2005−154549号明細書
【特許文献2】米国特許第5598207号明細書
【特許文献3】米国特許第5220848号明細書
【特許文献4】米国特許第4233634号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、これらの問題に対する救済策または解決法を提供しようとする。
【課題を解決するための手段】
【0008】
第一の広範囲独立態様において、本発明は、駆動列手段と、駆動列手段の回転出力手段に装着された第1誘導位置センサと、駆動列手段に動作接続された回転入力デバイスに装着された第2誘導位置センサとを包含して、第1位置センサにより検知されるインダクタンスが回転出力手段の回転変位を表し、第2位置センサにより検知されるインダクタンスが回転入力デバイスの回転変位を表す、ビデオカメラを支持するためのカメラ支持装置を提供する。
【0009】
この構成の長所は、カメラ支持体に具備される駆動列ユニットの入力シャフトと出力シャフトの両方の回転変位を判断する正確な手段を提供することである。駆動列ユニットの入力および出力の両方のシャフトの位置調整は、駆動列ユニットの入力シャフトおよび出力シャフトに位置する誘導センサの両方により検知されるインダクタンスを変化させる。インダクタンスが検知される磁場は連続的であって、各シャフトの絶対的回転位置を判断するための高解像度データを提供する。そのため、電動モータなどの回転入力デバイスからの回転入力を制御システムが所定量だけ調節することができると、出力シャフトが正しい位置へ確実に回転し、その後で、支持されたビデオカメラが正確な反復可能位置へ位置調整される。
【0010】
第1誘導位置センサがさらに、受動的誘導部材である第1主要部材と、複数の巻線を具備する能動部材である第2主要部材とを包含し、使用時に、回転測定経路に沿って変位した受動的誘導部材の位置を巻線のインダクタンスが表すことが好ましい。この構成では、第1誘導センサが駆動列ユニットの出力に配置される。第2主要部材の巻線は、磁場における受動的第1主要部材の相対回転位置を表す高解像度データを出力するためのアンテナとして機能する磁場を提供する。
【0011】
第1誘導位置センサの第1主要部材は、駆動列手段の最終駆動要素に装着される回転子であることが好ましい。こうして、駆動列ユニットの最終駆動要素に装着された時にセンサの第2主要部材の磁場における最終駆動列要素の回転変位を正確に追跡する受動的な第1主要部材をロータに形成することにより、駆動列ユニットの出力シャフトの回転変位を第1誘導センサが判断することができる。
【0012】
第1誘導位置センサの第2主要部材は、使用時に駆動列手段をパンアンドチルトヘッドに装着する支持部材に装着されたステータであることが好ましい。こうして、ステータを定位置に維持して、駆動列ユニットの出力シャフトに装着されたロータのアンテナ磁場における回転変位を検知するアンテナ磁場を発生させる支持部材にステータを装着することにより、駆動列ユニットの出力シャフトの回転変位を第1誘導センサが判断して、回転経路に沿ったセンサのロータの回転変位を正確に表すデータをセンサが出力することができる。
【0013】
カメラ支持装置はさらに、駆動列手段の最終駆動要素と第1誘導位置センサの第1主要部材との間に配置された第1非金属スペーサを包含する。この構成は、歯車駆動装置である最終駆動要素の金属塊が、ロータの位置を検出するのにエンコーダが使用する磁場に影響を与えることを回避する。プラスチックスペーサは、第1エンコーダのロータと歯車駆動装置とを分離する。
【0014】
カメラ支持装置がさらに、支持部材と第1誘導位置センサの第2主要部材との間に配置された第2非金属スペーサを包含することが好ましい。こうして、支持部材の主要部の金属塊が、ロータの位置を検出するのに第1エンコーダが使用する磁場に影響を与えることを回避する。ステータと支持部材の主要部とを分離するのに、プラスチックスペーサが使用される。
【0015】
第2誘導位置センサがさらに、受動的誘導部材である第1主要部材と、複数の巻線を具備する能動部材である第2主要部材とを包含し、使用時に、回転測定経路に沿って変位した誘導部材の位置を巻線のインダクタンスが表すことが好ましい。この構成では、第2誘導センサが駆動列ユニットの入力に配置される。第2主要部材の巻線は、磁場における受動的第1主要部材の相対回転位置を表す高解像度データを出力するアンテナとして機能する磁場を形成する。
【0016】
第2誘導位置センサの第1主要部材は、回転入力デバイスに装着されたロータであることが好ましい。こうして、回転入力デバイスつまり電動モータに装着された時に入力駆動シャフトの回転変位を正確に追跡する受動的第1主要部材をロータに形成することにより、第2誘導センサが駆動列ユニットの入力シャフトの回転変位を判断することができる。
【0017】
第2誘導位置センサの第2主要部材が、駆動列手段に装着された第2支持部材に装着されるステータであることが好ましい。こうして、ステータを定位置に維持して、アンテナ磁場内で回転入力デバイスに装着されたロータの回転変位を検知する磁場を発生させるカメラ支持装置にステータを装着することにより、駆動列ユニットからの入力シャフトの回転変位を第2誘導センサが判断して、回転経路に沿ったセンサのロータの回転変位を正確に表すデータをセンサが出力することができる。
【0018】
第2誘導位置センサの第1主要部材と回転入力デバイスとの間に配置された第3非金属スペーサをカメラ支持装置がさらに包含することが好ましい。この構成は、回転入力デバイスつまり電動モータにより発生される電磁場が、モータに装着されたロータの位置を検出するのにエンコーダが使用する磁場に影響を与えることを防止する。
【0019】
パンアンドチルトヘッドを駆動および支持する方法がさらに、上述したカメラ支持装置を包含することが好ましい。
【0020】
ビデオカメラを支持するためのパンアンドチルトヘッド装置がさらに、上述したカメラ支持装置を包含することが好ましい。
【0021】
ビデオカメラを支持するためのロボット式架台装置がさらに、上述したカメラ支持装置を包含することが好ましい。
【0022】
ビデオカメラを支持するための手動式架台装置がさらに、上述したカメラ支持装置を包含することが好ましい。
【0023】
第二の広範囲独立態様において、本発明は、使用時にビデオカメラを支持するカメラ支持装置を提供し、支持されたカメラを軸に沿って移動させる手段と、装置に装着される誘導位置センサとをこの装置が包含し、位置センサにより検知されるインダクタンスが、支持されたカメラの変位を表す。
【0024】
この構成では、誘導センサにより検知される1本の軸上の自由移動をカメラ支持装置が行うことができ、検知されるインダクタンスはこの軸に沿ったカメラの変位を表している。出力エンコーダは、固定プレートにより、または架台そのものの移動により変位したカメラの絶対位置を判断および/または測定する。回転位置は度数で測定される。これは、この軸に沿ったパンアンドチルトヘッドの絶対位置を測定および判断するのに、特に好都合である。または代替的に、ロボットナビゲーションなどの用途では、車輪の絶対位置、および架台支持体の支持車輪/駆動車輪が移動した増加距離が判断されて、床における架台の位置が計算される。
【0025】
カメラ支持装置がさらに、回転運動の回転速度を駆動段の間で低下させることにより、各駆動段の入力に印加されるトルクを各駆動段の出力での上昇トルクに変換するために一緒に結合された各連続駆動段を具備し、連続駆動段の一つが歯車駆動装置を具備する駆動列をさらに包含して、ベルト駆動装置を具備する別の段が歯車駆動装置の前に設けられることを特徴とすることが好ましい。この構成は、支持されたカメラから離れて配置されたオーディオ機器にピックアップされないように高速の回転速度を駆動装置に静かに伝達する手段を提供する。
【0026】
カメラ支持装置がさらに、駆動列に動作接続された回転入力デバイスに装着される第2位置センサを包含して、この第2センサにより検知される位置が、回転測定経路に沿った入力デバイスの回転変位を表すことが好ましい。この構成の長所は、カメラ支持装置に具備される駆動列ユニットの入力シャフトの回転変位を判断する正確な手段を提供することである。入力シャフトの回転位置は、駆動列ユニットの入力シャフトに位置する第2位置センサにより検知される回転位置である。第2位置センサは、入力シャフトの絶対回転位置を判断するための高解像度データを提供する。そのため、出力シャフトが正しい位置へ確実に回転し、続いて、支持されたビデオカメラを正確な反復可能位置へ位置調整するように、制御システムが電動モータなどの回転入力デバイスからの回転入力を所定量だけ調節することができる。
【0027】
誘導センサがさらに、受動的誘導部材である第1主要部材と、複数の巻線を具備する能動部材である第2主要部材とを包含して、使用時に、回転測定経路に沿って変位した受動部材の位置を巻線のインダクタンスが表すことが好ましい。この構成では、誘導センサが駆動列ユニットの出力に配置される。第2主要部材の巻線は、磁場における受動的第1主要部材の相対回転位置を表す高解像度データを出力するためのアンテナとして機能する磁場を提供する。
【0028】
誘導位置センサの第1主要部材が、駆動列手段の最終駆動要素に装着されるロータであることが好ましい。こうして、駆動列ユニットの最終駆動要素に装着された時に、センサの第2主要部材の磁場における最終駆動列要素の回転変位を正確に追跡する受動的第1主要部材をロータに形成することにより、駆動列ユニットの出力シャフトの回転変位を誘導センサが判断することができる。
【0029】
第1誘導センサの第2主要部材が、使用時に駆動列を装置に装着する支持部材に装着されるステータであることが好ましい。こうして、ステータを定位置に維持して、アンテナ磁場内で駆動列ユニットの出力シャフトに装着されたロータの回転変位を検知するアンテナ磁場を発生させる支持部材にステータを装着することにより、駆動列ユニットの出力シャフトの回転変位を誘導センサが判断することができ、回転経路に沿ったセンサのロータの回転変位を正確に表すデータをセンサが出力できる。
【0030】
パンアンドチルトヘッドが上記の装置を包含し、支持されたカメラの垂直軸を中心とする回転変位が、回転測定経路に沿って検知されることが好ましい。この構成では、360度パノラマ軸に沿って、支持されたカメラを変位させることができる。
【0031】
パンアンドチルトヘッドが上記の第2装置を包含して、支持されたカメラの水平軸を中心とする回転変位が回転測定経路に沿って検知されることが好ましい。この構成では、支持されたカメラが垂直軸に沿って変位することが可能である。
【0032】
カメラ架台が上記の装置を包含することが好ましい。この構成では、トラック上を移動した距離を架台が測定できる。
【0033】
カメラ架台が上記の装置を包含し、接地部材の回転変位が回転測定経路に沿って検知されることが好ましい。架台は、車輪などの接地部材を検知して、架台の変位を量化する。
【0034】
クレーンが上記の装置を包含し、水平軸を中心とするクレーンアームの回転変位が回転測定経路に沿って検知されることが好ましい。この構成では、垂直軸に沿ったクレーンアームの変位をクレーンが量化できる。
【0035】
クレーンが上記の装置を包含し、垂直軸を中心とするクレーンアームの回転変位が回転測定経路に沿って検知されることが好ましい。この構成では、水平軸に沿ったクレーンアームの変位をクレーンが量化できる。
【図面の簡単な説明】
【0036】
【図1】二つのエンコーダを具備する駆動列ユニットの斜視図を示す。
【図2】二つのエンコーダを具備する駆動列ユニットの側面図を示す。
【図3】二つのエンコーダを具備する駆動ユニットの代替的実施形態の側面図を示す。
【図4】二つのエンコーダを具備する駆動ユニットの代替的実施形態の斜視図を示す。
【発明を実施するための形態】
【0037】
図1は、全体が1と記された駆動列ユニットの斜視図を示している。駆動列システム1は、入力モータ4の回転部材に装着されたロータ2を具備する入力エンコーダを有する。入力エンコーダは、駆動列ユニット1に結合された入力モータ4の支持部材5に装着されるステータ部材3を含む。支持部材5を入力モータ4から離間させる長尺の六角形支持部材6を介して、支持部材5が駆動列ユニット1に装着されている。
【0038】
入力モータ4は、駆動ベルト8により駆動されるプーリである第1駆動要素7に結合されている。第1駆動要素7は続いて、摩擦駆動プーリである第2駆動要素9を駆動する。そして第2駆動要素9は、歯車である第3駆動要素10に結合されている。第3駆動要素10は、三脚、架台、その他などのカメラ支持体への駆動列の装着を容易にする円形固定プレート11に結合されている。固定プレート11は、駆動列をカメラ支持体に装着するための固定孔12の列を備える円形フランジを具備している。
【0039】
駆動列ユニット1の支持部材13は、最終駆動要素10に装着されている。出力エンコーダのステータ14は、最終駆動要素10に面する支持部材13の表面に装着されている。出力エンコーダのステータ14は、電気コネクタ15を具備するプリント回路基板から形成される。支持部材13は、支持表面または部材への駆動列ユニットの装着を可能にする90°屈曲部を備える「L字」固定ブラケットも具備する。
【0040】
駆動ユニット1に結合された入力モータ4の端部に装着された第2プリント回路基板17には、第2電気コネクタ16が取り付けられている。
【0041】
図2は、駆動列システム1の側面図を示している。入力エンコーダのステータ3は、駆動列ユニット1に結合されていない入力モータ4の一端部に装着された支持部材5の内側表面に装着されている。入力エンコーダのロータ2と入力モータ4との間には、プラスチックスペーサ20が配置されている。入力モータ4は、駆動ベルト8を介して第1駆動要素7に結合されている。
【0042】
出力エンコーダのステータ14は、第3駆動要素10に面する支持部材13の内側表面に装着されている。プラスチック材料製の非金属スペーサ21が、出力エンコーダのステータ14と支持部材13の表面との間に配置されている。出力エンコーダのロータ23は、出力歯車駆動装置10に装着されている。出力エンコーダのロータ23と歯車出力駆動要素10との間には、プラスチック材料製の第2非金属スペーサ22が形成されている。
【0043】
使用時には、アンテナとして機能する入力エンコーダのステータの巻線により発生される磁場により、入力エンコーダのロータの回転運動が検知される。ステータに具備されている巻線のインダクタンスは、回転経路上を動いているロータの回転位置に比例して変化する。そのため、入力モータのシャフトの絶対位置が判断される。
【0044】
駆動列は、入力モータからの回転運動を第1駆動要素に伝達する。続いて第1駆動要素は、一般的には摩擦駆動装置である第2駆動要素を駆動する。摩擦駆動装置は続いて、一般的には出力歯車駆動装置である第3駆動要素を駆動する。歯車駆動装置は高トルクの回転運動を、装着された固定プレートに付与し、このプレートはカメラ支持体に装着されている。
【0045】
歯車出力駆動要素は、静止ステータと協働する受動ロータを有する出力エンコーダを有する。出力エンコーダのロータの回転運動は、アンテナとして機能する出力エンコーダのステータの巻線により発生される磁場によって検知される。駆動モータの回転位置に対する固定プレートの回転位置を判断するため最終駆動要素に装着されたロータの回転位置に比例して、ステータ内の巻線のインダクタンスが変化する。
【0046】
そのため、出力エンコーダは固定プレートの絶対的な回転位置を判断/測定する。回転位置は度数で測定される。起動時に入力エンコーダは、ゼロ値にリセットされた後で、入力モータからの入力回転に従って増減される。入力エンコーダの増分値を増減することにより、モータは周知の位置に正しく位置調整される。
【0047】
駆動ユニットに誘導エンコーダを使用する長所は、
エンコーダは、大径シャフトに嵌着可能であるので、太くて硬いシャフトを使用して剛性を最大にすることができる。これは、映画およびスタジオエリアで使用するためのパン/チルトヘッド、架台、または他のカメラ支持機器の剛性にとって有益である。
エンコーダは軸方向の寸法が小さい。これは、映画およびスタジオエリアで使用するためのパンアンドチルトヘッド、架台、または他のカメラ支持機器のパッケージングにとって有益である。
誘導エンコーダは、光学エンコーダ技術ほど軸方向の不整合に影響されない。組立を容易にするのは確実であるので、これは有益である。
誘導エンコーダは、光学エンコーダ技術ほど汚れおよび湿度に影響されない。映画およびスタジオエリアで使用するためのパン/チルトヘッド、架台、または他のカメラ支持機器が環境条件に影響されないので、これは有益である。
映画およびスタジオエリアでの使用のためのパン/チルトヘッド、架台、または他のカメラ支持機器に必要とされるスムーズで正確かつ反復可能な動きに必要な、高解像度の絶対位置データを提供する。光学エンコーダの使用では、従来、同レベルの解像度と絶対位置を達成するには、二つの光学エンコーダを嵌着しなければならなかった。絶対位置のための低解像度のエンコーダを一つと、高解像度だが動きが増分的である第2エンコーダ。
コスト効果の高いエンコーダ解決法は、製品全体のコストの最小化に役立つ。
低質量設計は、製品全体の重量の最小化に役立つ。
衝撃および振動に対して機械的に強いので、製品全体の頑強性を向上させる。
【0048】
本発明の代替的実施形態において、ビデオカメラは支持装置によって保持および支持される。支持装置は、支持されたカメラの1本の自由軸に沿った移動(自由移動)を許容し、自由軸に沿った移動を検知する誘導位置センサも具備する。誘導センサにより検知されるインダクタンスは、自由軸に沿ったカメラの変位を表す。変位は、回転変位タイプに典型的なものであればよい。
【0049】
支持装置は一般的に、パンアンドチルト軸の絶対位置を測定および判断する誘導センサを具備するパンアンドチルトヘッド(手動式および/またはロボット式)でよい。
【0050】
あるいは代替的に、支持装置が一般的に、架台の支持車輪により移動するステアリングの絶対位置および増分距離を測定および判断するため誘導センサを具備する支持架台(手動式/および/またはロボット式)であってもよい。絶対位置は、フロア上での架台位置を計算および判断するのに使用されるとともに、ロボットナビゲーションなどの用途で使用される。
【0051】
図3は、入力モータ30を具備する駆動列ユニットの側面図を示す。入力モータの一端部に装着されているのは、一般的には光学エンコーダまたはホールセンサである角度位置測定デバイス31である。装着されたセンサと反対の入力モータの端部は、大型プーリ34を駆動するベルト33を駆動する小型プーリ32で構成される第1駆動要素に動作接続されている。小型プーリ32は、入力モータ30にしっかりと接続されている。第1駆動要素は、入力モータ30からのトルクを低下させ、大型プーリ34を介してこれを出力する。
【0052】
第1駆動要素の大型プーリ34の中央から突出する駆動シャフト35は、第2駆動要素の入力に動作接続されている。第2駆動要素は、大型歯車37と係合する小型歯車36で構成される。小型歯車36は、駆動シャフト35にしっかりと接続されている。第2駆動要素は、第1駆動要素からのトルクを低下させ、大型歯車37を介してこれを出力する。
【0053】
第2駆動要素の大型歯車37の中央から突出する駆動シャフト40は、円形固定プレート41に動作接続されている。円形固定プレート41は、三脚、架台、その他などのカメラ支持体への駆動列の装着を容易にする。固定プレート41は、駆動列をカメラ支持体に装着するための固定孔の列を備える円形フランジを具備する。
【0054】
誘導出力エンコーダは、ヘッド(不図示)の主要部に装着されたステータ38と、第2駆動要素の出力を形成する大型歯車37の中央から突出してこの歯車に動作接続されたロータ39とで構成される。
【0055】
図4は、図3に示されたのと同じ駆動列ユニットの斜視図を示している。
【0056】
使用時に、駆動列は入力モータからの回転運動を第1駆動要素へ伝達する。第1駆動要素は続いて、第2駆動要素を駆動する。第2駆動要素は、静止ステータと協働する受動ロータを有する出力エンコーダを有する。出力エンコーダのロータの回転運動は、アンテナとして機能する出力エンコーダのデータの巻線により発生される磁場によって検知される。ステータに具備される巻線の誘導は、固定プレートの回転位置を判断するため最終駆動要素に装着されたロータの回転位置に比例して変化する。
【0057】
そのため、出力エンコーダは固定プレートの絶対回転位置を判断/測定する。回転位置は、やはり度数で測定される。
【0058】
本発明の代替的実施形態は、取り付けられたカメラをパンアンドチルト軸の両方に沿って動かすパン/チルトカメラ取り付けヘッドであり、クレーム記載発明の装置は、パノラマ軸を中心としてカメラを360°動かす駆動列エンコーダである。支持されたカメラをチルト軸を中心として動かすため、実質的に同一であるが別の駆動列エンコーダがヘッドに具備される。
【0059】
本発明の別の実施形態において、トラックに沿った架台の接地車輪の動きを検知してトラック上で移動した距離を測定するロボット式/手動式架台に、駆動列エンコーダが具備される。架台および車輪はロボット手段によって駆動されるか、単なる転動車輪であって架台が手で押し出される。架台は車輪を検知して、それが床の上で移動した距離を測定し、こうして床における位置を導出する。
【0060】
本発明の代替的実施形態では、垂直軸を中心とするクレーンアームの回転を検知するセンサと、水平軸を中心とするクレーンアームの回転を検出するセンサとを具備して、支持されたカメラのX,Y,Z軸上での配向を測定および判断(つまり計算)する駆動列エンコーダが、クレーンに具備される。クレーンアームは、ロボット手段を介して駆動されるか、手で押される。移動範囲を広げるため、トラックまたは架台にクレーンが取り付けられてもよい。
【0061】
本発明の代替的実施形態では、単一軸に沿った移動を制御および測定する駆動装置を備えるカメラ支持機器に駆動列エンコーダが具備されて、単一の誘導センサによって測定が判断されるとよい。
【0062】
本発明の別の代替的実施形態では、測定される必要のある手動制御軸を持つカメラ支持機器に駆動列エンコーダが具備され、単一の誘導センサによって測定が判断される。
【符号の説明】
【0063】
1 駆動列ユニット、2 ロータ、3 ステータ部材、4 入力モータ、5 支持部材、6 六角形支持部材、7 第1駆動要素、8 駆動ベルト、9 第2駆動要素、10 第3駆動要素、11 円形固定プレート、12 固定孔、13 支持部材、14 ステータ、15 電気コネクタ、16 第2電気コネクタ、17 第2プリント回路基板、20 プラスチックスペーサ、21 非金属スペーサ、22 第2非金属スペーサ、23 ロータ、30 入力モータ、31 角度位置測定デバイス、32 小型プーリ、33 ベルト、34 大型プーリ、35 駆動シャフト、36 小型歯車、37 大型歯車、38 ステータ、39 ロータ、40 駆動シャフト、41 固定プレート。
【特許請求の範囲】
【請求項1】
駆動列手段と、
前記駆動列手段の回転出力手段に装着された第1誘導位置センサと、
前記駆動列手段に動作接続された回転入力デバイスに装着された第2誘導位置センサと、
を有し、
前記第1誘導位置センサにより検知されるインダクタンスが前記回転出力手段の回転変位を表し、
前記第2誘導位置センサにより検知されるインダクタンスが前記回転入力デバイスの回転変位を表す、
ことを特徴とするビデオカメラを支持するためのカメラ支持装置。
【請求項2】
前記第1誘導位置センサが、さらに、
受動的誘導部材である第1主要部材と、
複数の巻線を具備する能動部材である第2主要部材と、
を有し、
使用時に、回転測定経路に沿って変位した前記受動的誘導部材の位置を前記巻線のインダクタンスが表す、
ことを特徴とする請求項1に記載の装置。
【請求項3】
前記第1誘導位置センサの前記第1主要部材が、前記駆動列手段の最終駆動要素に装着されたロータである、
ことを特徴とする請求項2に記載の装置。
【請求項4】
前記第1誘導位置センサの前記第2主要部材が、使用時に前記駆動列手段をパンアンドチルトヘッドに装着する支持部材に装着されたステータである、
ことを特徴とする請求項2に記載の装置。
【請求項5】
前記駆動列手段の前記最終駆動要素と前記第1誘導位置センサの前記第1主要部材との間に配置された第1非金属スペーサをさらに有する、
ことを特徴とする請求項2または3に記載の装置。
【請求項6】
前記支持部材と前記第1誘導位置センサの前記第2主要部材との間に配置された第2非金属スペーサをさらに有する、
ことと特徴とする請求項2または4に記載の装置。
【請求項7】
前記第2誘導位置センサが、さらに、
受動的誘導部材である第1主要部材と、
複数の巻線を含む能動部材である第2主要部材と
を有し、
使用時に、回転測定経路に沿って変位した前記受動的誘導部材の位置を前記巻線のインダクタンスが表す、
ことを特徴とする請求項1から6のいずれかに記載の装置。
【請求項8】
前記第2誘導位置センサの前記第1主要部材が、前記回転入力デバイスに装着されたロータである、
ことを特徴とする請求項7に記載の装置。
【請求項9】
前記第2誘導位置センサの前記第2主要部材が、前記駆動列手段に装着された第2支持部材に装着されたステータである、
ことを特徴とする請求項7に記載の装置。
【請求項10】
前記第2誘導位置センサの前記第1主要部材と前記回転入力デバイスとの間に配置された第3非金属スペーサをさらに有する、
ことを特徴とする請求項7または8に記載の装置。
【請求項11】
請求項1から10のいずれかに記載のビデオカメラを使用時に支持する、パンアンドチルトヘッドを駆動および支持する方法。
【請求項12】
請求項1から11のいずれかに記載のカメラ支持装置をさらに有する、ビデオカメラを支持するためのパンアンドチルトヘッド装置。
【請求項13】
請求項1から11のいずれかに記載のカメラ支持装置をさらに包含する、ビデオカメラを支持するためのロボット式架台装置。
【請求項14】
請求項1から11のいずれかに記載のカメラ支持装置をさらに包含する、ビデオカメラを支持するための手動式架台装置。
【請求項15】
実質的には添付の文章および/または図の適切な組み合わせにおいて上述および/または図示された、ビデオカメラを支持するためのカメラ支持装置。
【請求項16】
使用時にビデオカメラを支持するカメラ支持装置であって、
支持されたカメラを軸に沿って移動させる手段と、
前記装置に装着された誘導位置センサと
を有する装置であり、
前記位置センサにより検知されるインダクタンスが、支持されたカメラの変位を表す、
ことと特徴とするカメラ支持装置。
【請求項17】
前記軸が直線軸または回転軸である、
ことと特徴とする請求項16に記載のカメラ支持装置。
【請求項18】
前記駆動段の間で回転運動の回転速度を低下させることにより各駆動段の入力に印加されるトルクを各駆動段の出力で高トルクに変換するための、一緒に結合された各連続駆動段を具備する駆動列をさらに有し、
前記連続駆動段の一つが歯車駆動装置を具備する装置であって、前記歯車駆動装置の前にベルト駆動装置を具備する別の段が設けられる、
ことを特徴とする、請求項16または17に記載の装置。
【請求項19】
前記駆動列に動作接続された回転入力デバイスに装着される第2位置センサをさらに有し、
前記第2センサにより検知される位置が、回転測定経路に沿った前記入力デバイスの回転変位を表す、
ことを特徴とする請求項16から18のいずれかに記載の装置。
【請求項20】
前記誘導センサが、さらに、
受動的誘導部材である第1主要部材と、
複数の巻線を具備する能動部材である第2主要部材と、
を有し、
使用時に、回転測定経路に沿って変位した前記受動部材の位置を前記巻線のインダクタンスが表す、
ことを特徴とする請求項16から19のいずれかに記載の装置。
【請求項21】
前記誘導位置センサの前記第1主要部材が、前記駆動列手段の最終駆動要素に装着されたロータである、
ことを特徴とする請求項16から20のいずれかに記載の装置。
【請求項22】
前記第1誘導センサの前記第2主要部材が、使用時に前記駆動列を前記装置に装着する支持部材に装着されたステータである、
ことを特徴とする請求項16から21のいずれかに記載の装置。
【請求項23】
支持されたカメラの垂直軸を中心とする前記回転変位が回転測定経路に沿って検知される、
ことを特徴とする請求項16から22のいずれかに記載の前記装置を包含するパンアンドチルトヘッド。
【請求項24】
支持されたカメラの水平軸を中心とする前記回転変位が回転測定経路に沿って検知される、
ことを特徴とする請求項16から23のいずれかに記載の第2の前記装置を包含するパンアンドチルトヘッド。
【請求項25】
請求項16から24のいずれかに記載の前記装置を包含するカメラ架台。
【請求項26】
接地部材の回転変位が回転測定経路に沿って検知される、
ことを特徴とする請求項16から25のいずれかに記載の前記装置を包含するカメラ架台。
【請求項27】
クレーンアームの水平軸を中心とする回転変位が回転測定経路に沿って検知される、
ことを特徴とする請求項16から22のいずれかに記載の前記装置を包含するクレーン。
【請求項28】
クレーンアームの垂直軸を中心とする回転変位が回転測定経路に沿って検知される、
ことを特徴とする請求項16から22および27のいずれかに記載の前記装置を包含するクレーン。
【請求項29】
実質的には添付の文章および/または図の適切な組み合わせにおいて上述および/または図示されたビデオカメラを使用時に支持する、カメラ支持装置。
【請求項1】
駆動列手段と、
前記駆動列手段の回転出力手段に装着された第1誘導位置センサと、
前記駆動列手段に動作接続された回転入力デバイスに装着された第2誘導位置センサと、
を有し、
前記第1誘導位置センサにより検知されるインダクタンスが前記回転出力手段の回転変位を表し、
前記第2誘導位置センサにより検知されるインダクタンスが前記回転入力デバイスの回転変位を表す、
ことを特徴とするビデオカメラを支持するためのカメラ支持装置。
【請求項2】
前記第1誘導位置センサが、さらに、
受動的誘導部材である第1主要部材と、
複数の巻線を具備する能動部材である第2主要部材と、
を有し、
使用時に、回転測定経路に沿って変位した前記受動的誘導部材の位置を前記巻線のインダクタンスが表す、
ことを特徴とする請求項1に記載の装置。
【請求項3】
前記第1誘導位置センサの前記第1主要部材が、前記駆動列手段の最終駆動要素に装着されたロータである、
ことを特徴とする請求項2に記載の装置。
【請求項4】
前記第1誘導位置センサの前記第2主要部材が、使用時に前記駆動列手段をパンアンドチルトヘッドに装着する支持部材に装着されたステータである、
ことを特徴とする請求項2に記載の装置。
【請求項5】
前記駆動列手段の前記最終駆動要素と前記第1誘導位置センサの前記第1主要部材との間に配置された第1非金属スペーサをさらに有する、
ことを特徴とする請求項2または3に記載の装置。
【請求項6】
前記支持部材と前記第1誘導位置センサの前記第2主要部材との間に配置された第2非金属スペーサをさらに有する、
ことと特徴とする請求項2または4に記載の装置。
【請求項7】
前記第2誘導位置センサが、さらに、
受動的誘導部材である第1主要部材と、
複数の巻線を含む能動部材である第2主要部材と
を有し、
使用時に、回転測定経路に沿って変位した前記受動的誘導部材の位置を前記巻線のインダクタンスが表す、
ことを特徴とする請求項1から6のいずれかに記載の装置。
【請求項8】
前記第2誘導位置センサの前記第1主要部材が、前記回転入力デバイスに装着されたロータである、
ことを特徴とする請求項7に記載の装置。
【請求項9】
前記第2誘導位置センサの前記第2主要部材が、前記駆動列手段に装着された第2支持部材に装着されたステータである、
ことを特徴とする請求項7に記載の装置。
【請求項10】
前記第2誘導位置センサの前記第1主要部材と前記回転入力デバイスとの間に配置された第3非金属スペーサをさらに有する、
ことを特徴とする請求項7または8に記載の装置。
【請求項11】
請求項1から10のいずれかに記載のビデオカメラを使用時に支持する、パンアンドチルトヘッドを駆動および支持する方法。
【請求項12】
請求項1から11のいずれかに記載のカメラ支持装置をさらに有する、ビデオカメラを支持するためのパンアンドチルトヘッド装置。
【請求項13】
請求項1から11のいずれかに記載のカメラ支持装置をさらに包含する、ビデオカメラを支持するためのロボット式架台装置。
【請求項14】
請求項1から11のいずれかに記載のカメラ支持装置をさらに包含する、ビデオカメラを支持するための手動式架台装置。
【請求項15】
実質的には添付の文章および/または図の適切な組み合わせにおいて上述および/または図示された、ビデオカメラを支持するためのカメラ支持装置。
【請求項16】
使用時にビデオカメラを支持するカメラ支持装置であって、
支持されたカメラを軸に沿って移動させる手段と、
前記装置に装着された誘導位置センサと
を有する装置であり、
前記位置センサにより検知されるインダクタンスが、支持されたカメラの変位を表す、
ことと特徴とするカメラ支持装置。
【請求項17】
前記軸が直線軸または回転軸である、
ことと特徴とする請求項16に記載のカメラ支持装置。
【請求項18】
前記駆動段の間で回転運動の回転速度を低下させることにより各駆動段の入力に印加されるトルクを各駆動段の出力で高トルクに変換するための、一緒に結合された各連続駆動段を具備する駆動列をさらに有し、
前記連続駆動段の一つが歯車駆動装置を具備する装置であって、前記歯車駆動装置の前にベルト駆動装置を具備する別の段が設けられる、
ことを特徴とする、請求項16または17に記載の装置。
【請求項19】
前記駆動列に動作接続された回転入力デバイスに装着される第2位置センサをさらに有し、
前記第2センサにより検知される位置が、回転測定経路に沿った前記入力デバイスの回転変位を表す、
ことを特徴とする請求項16から18のいずれかに記載の装置。
【請求項20】
前記誘導センサが、さらに、
受動的誘導部材である第1主要部材と、
複数の巻線を具備する能動部材である第2主要部材と、
を有し、
使用時に、回転測定経路に沿って変位した前記受動部材の位置を前記巻線のインダクタンスが表す、
ことを特徴とする請求項16から19のいずれかに記載の装置。
【請求項21】
前記誘導位置センサの前記第1主要部材が、前記駆動列手段の最終駆動要素に装着されたロータである、
ことを特徴とする請求項16から20のいずれかに記載の装置。
【請求項22】
前記第1誘導センサの前記第2主要部材が、使用時に前記駆動列を前記装置に装着する支持部材に装着されたステータである、
ことを特徴とする請求項16から21のいずれかに記載の装置。
【請求項23】
支持されたカメラの垂直軸を中心とする前記回転変位が回転測定経路に沿って検知される、
ことを特徴とする請求項16から22のいずれかに記載の前記装置を包含するパンアンドチルトヘッド。
【請求項24】
支持されたカメラの水平軸を中心とする前記回転変位が回転測定経路に沿って検知される、
ことを特徴とする請求項16から23のいずれかに記載の第2の前記装置を包含するパンアンドチルトヘッド。
【請求項25】
請求項16から24のいずれかに記載の前記装置を包含するカメラ架台。
【請求項26】
接地部材の回転変位が回転測定経路に沿って検知される、
ことを特徴とする請求項16から25のいずれかに記載の前記装置を包含するカメラ架台。
【請求項27】
クレーンアームの水平軸を中心とする回転変位が回転測定経路に沿って検知される、
ことを特徴とする請求項16から22のいずれかに記載の前記装置を包含するクレーン。
【請求項28】
クレーンアームの垂直軸を中心とする回転変位が回転測定経路に沿って検知される、
ことを特徴とする請求項16から22および27のいずれかに記載の前記装置を包含するクレーン。
【請求項29】
実質的には添付の文章および/または図の適切な組み合わせにおいて上述および/または図示されたビデオカメラを使用時に支持する、カメラ支持装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−88819(P2013−88819A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−230608(P2012−230608)
【出願日】平成24年10月18日(2012.10.18)
【出願人】(500452617)ヴィテック グループ ピーエルシー (10)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2012−230608(P2012−230608)
【出願日】平成24年10月18日(2012.10.18)
【出願人】(500452617)ヴィテック グループ ピーエルシー (10)
【Fターム(参考)】
[ Back to top ]