
カラス忌避システム
【課題】線路、駅構内、駐車場、ごみ収集所に近寄るカラスのみを検知して忌避することができるカラス忌避システムを提供する。
【解決手段】カラス忌避システムは、レーザ光源および光センサを含む測域センサ14とカラス忌避音発生装置とを有する。測域センサ14は、レーザ光源からのレーザビームが検知エリア17内において面状に走査されるように構成される。検知エリア17内においてレーザビームが物体に照射されて反射された光が光センサにより検出され、10ミリ秒以上1.5秒以内にレーザビームが光センサにより再度検出されないとき、カラス忌避音発生装置からカラス忌避音を発生させるように構成される。光センサにより再度検出されたときには、カラス忌避音発生装置からカラス忌避音を発生させないようにする。
【解決手段】カラス忌避システムは、レーザ光源および光センサを含む測域センサ14とカラス忌避音発生装置とを有する。測域センサ14は、レーザ光源からのレーザビームが検知エリア17内において面状に走査されるように構成される。検知エリア17内においてレーザビームが物体に照射されて反射された光が光センサにより検出され、10ミリ秒以上1.5秒以内にレーザビームが光センサにより再度検出されないとき、カラス忌避音発生装置からカラス忌避音を発生させるように構成される。光センサにより再度検出されたときには、カラス忌避音発生装置からカラス忌避音を発生させないようにする。
【発明の詳細な説明】
【技術分野】
【0001】
この発明はカラス忌避システムに関し、例えば、鉄道線路、駅、駐車場、ごみ収集所などにおいてカラスによる各種の被害を防止するのに適用して好適なものである。
【背景技術】
【0002】
従来、鉄道線路において、カラスの悪戯による置石が原因の輸送障害が発生している。その対策として、これまでに、カラスが線路に近寄らないようにするために、オレンジ色のネットあるいは黄色のシートを線路間の路盤上に設置したり、反射材、風車、カラス模型、黄色リボンなどを線路のそばに設置したりしていた。
【0003】
しかしながら、これらの方法では、材料の設置・撤去あるいは材料の劣化などで多大な労力・コストが必要となったり、カラスの学習能力により忌避効果が持続しなかったりするなどの問題があった。
【0004】
そこで、本出願人らは、線路脇の電化柱に線路上の物体を認識するためのセンサーを取り付け、このセンサーを60m間隔で2台設置し、このセンサーにより線路上で物体を1秒程度認識したとき、スピーカからカラスが仲間に危険を知らせる鳴き声を3分間流すことにより、線路上からカラスを排除する試みを行った(非特許文献1参照。)。
【0005】
なお、カラスなどの鳥獣による害を防止するための技術として、鳥獣の獲物への接近を鳥獣の発する赤外線で感知して、突発的な強烈光の点滅と威嚇音の発射とを行う技術(特許文献1参照。)、鉄塔に飛来した鳥を鳥感知センサにより感知し、鳥類、猛獣などの鳴声の合成音、カラスの警戒鳴声を複数種類記憶させた音声記憶回路からランダムに選択された威嚇音を周囲に発生させる技術(特許文献2参照。)などがある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−158372号公報
【特許文献2】特開平9−107865号公報
【非特許文献】
【0007】
【非特許文献1】2010年(平成22年)10月27日発行「岩手日報」第24頁(株式会社岩手日報社)
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、本発明者らの研究によれば、非特許文献1に記載された技術では、線路を走行する列車、線路内に侵入するカラス以外の諸動物(例えば、イタチ、モグラ、犬、猫など)、線路内に立ち入る人などを誤って検知してしまうという問題があった。
【0009】
そこで、この発明が解決しようとする課題は、線路に近寄るカラスあるいは駅構内の架線に近寄るカラスのみを検知して忌避することができるカラス忌避システムを提供することである。
【0010】
この発明が解決しようとする他の課題は、駐車場に近寄るカラスあるいはごみ収集所に近寄るカラスのみを検知して忌避することができるカラス忌避システムを提供することである。
【課題を解決するための手段】
【0011】
上記課題を解決するために、この発明は、
レーザ光源および光センサを含む測域センサと、
カラス忌避音発生装置とを有し、
上記測域センサは、上記レーザ光源からのレーザビームが、検知エリア内において面状に走査されるように構成され、
上記検知エリア内において上記レーザビームが物体に照射されて反射された光が上記光センサにより検出され、10ミリ秒以上1.5秒以内に上記レーザビームが上記光センサにより再度検出されないとき、上記カラス忌避音発生装置からカラス忌避音を発生させるように構成されていることを特徴とするカラス忌避システムである。
【0012】
このカラス忌避システムを鉄道線路へのカラスによる置石などの被害を未然に防止するために用いる場合には、測域センサは、典型的には、鉄道の線路に沿って設置される電化柱に設置されるが、これに限定されるものではなく、設置場所は必要に応じて選ぶことができる。検知エリアはカラスの検知を行うエリアを意味し、所定範囲の線路を含む。典型的には、検知エリア内においてレーザビームが物体に照射されて反射された光が光センサにより検出され、10ミリ秒以上1.5秒以内にレーザビームが光センサにより再度検出されたとき、物体は列車、人またはカラス以外の動物(例えば、イタチ、モグラ、犬、猫など)であると判断し、カラス忌避音発生装置からカラス忌避音を発生させないように構成される。ここで、10ミリ秒以上1.5秒以内にレーザビームが光センサにより再度検出されないときには、物体はカラスであると判断し、10ミリ秒以上1.5秒以内にレーザビームが光センサにより再度検出されたときには、物体は列車、人またはカラス以外の動物であると判断することとしたのは、本発明者らが実際にカラスの行動、列車の走行、線路に立ち入る人の行動、カラス以外の動物の行動を長期にわたって観察した結果に基づくものである。測域センサは、好適には、検知エリアにおけるレーザ光源からのレーザビームの下端が線路のレール面から20cm以上60cm以下の高さに位置するように所定の場所,例えば電化柱に設置される。ここで、検知エリアにおけるレーザ光源からのレーザビームの下端が線路のレール面から20cm以上60cm以下の高さに位置するようにしたのは、上記と同様に、本発明者らが実際にカラスの行動、列車の走行、線路に立ち入る人の行動、カラス以外の動物の行動を長期にわたって観察した結果に基づくものである。測域センサは一つだけ用いてもよいが、検知エリアを広げるためには、測域センサは、少なくとも互いに離れた2箇所、例えば少なくとも互いに隣接する2本の電化柱にそれぞれ設置される。この場合、好適には、少なくとも互いに離れた2箇所、例えば少なくとも互いに隣接する2本の電化柱に設置されたそれぞれの測域センサのレーザ光源からのレーザビームの走査範囲が少なくとも線路上において互いに重なるようにする。典型的には、例えば電化柱の、測域センサより高い位置にスピーカが設置され、カラス忌避音発生装置により発生されるカラス忌避音をこのスピーカから線路の上に流すようにする。カラス忌避システムに必要な電力は、電化柱から得ることもできるが、バッテリーから供給してもよい。バッテリーの充電は、クリーンエネルギーの使用の観点からは、好適には、太陽光を用いて行う。この場合、このカラス忌避システムは、測域センサおよびカラス忌避音発生装置に電力を供給するためのソーラーパネルをさらに有する。このソーラーパネルの設置箇所は必要に応じて選ばれる。好適には、ソーラーパネルは、杭の上部に取り付けられ、水平面に対する傾斜角度が調節可能に構成された取付金具の上に設置される。この杭は、好適には、線路の路盤ののり肩および/またはのり面に打ち込まれる。
【0013】
このカラス忌避システムは、必要に応じて、カラスの検知および忌避音の発生の回数ならびにカラスを検知してから次にカラスを検知するまでの経過時間のデータを記録保存するように構成される。こうして記録保存されたデータは、このカラス忌避システムの設置場所におけるカラスの行動を示すため、このデータを分析することにより、このカラス忌避システムによるカラスの忌避をより効率的かつ有効に行うことが可能となる。
【0014】
一方、このカラス忌避システムを駅構内の架線の被害を未然に防止するために用いる場合には、測域センサは、レーザ光源からのレーザビームが、駅構内の架線の付近を照射するように面状に走査されるように構成される。この場合、このレーザビームの走査面は、水平面内であってもよいし、架線より低い位置あるいは高い位置から架線に向かって傾斜した傾斜面内であってもよい。その他のことは、その性質に反しない限り、上記と同様である。
【0015】
また、この発明は、
レーザ光源および光センサを含む測域センサと、
カラス忌避音発生装置とを有し、
上記測域センサは駐車場またはごみ収集所の所定の高さに設置され、
上記測域センサは、上記レーザ光源からのレーザビームが、検知エリア内において面状に走査されるように構成され、
上記検知エリア内において上記レーザビームが物体に照射されて反射された光が上記光センサにより検出され、10ミリ秒以上1.5秒以内に上記レーザビームが上記光センサにより再度検出されないとき、上記カラス忌避音発生装置からカラス忌避音を発生させるように構成されていることを特徴とするカラス忌避システムである。
【0016】
この場合、測域センサは、好適には、レーザ光源からのレーザビームの下端が駐車場またはごみ収集所の地面から2m以上6m以下の高さに位置するように設置される。測域センサは、例えば、電化柱に設置されるが、これに限定されるものではなく、設置場所は必要に応じて選ぶことができる。測域センサは一つだけ用いてもよいが、検知エリアを広げるためには、測域センサは、少なくとも互いに離れた2箇所、例えば少なくとも互いに隣接する2本の電化柱にそれぞれ設置される。この場合、好適には、少なくとも互いに離れた2箇所、例えば少なくとも互いに隣接する2本の電化柱に設置されたそれぞれの測域センサのレーザ光源からのレーザビームの走査範囲が少なくとも駐車場またはごみ収集所において互いに重なるようにする。典型的には、駐車場またはごみ収集所あるいはそれらの付近の所定の位置にスピーカが設置され、忌避音発生装置により発生される音をこのスピーカから駐車場またはごみ収集所の上に流す。この発明の上記以外のことは、その性質に反しない限り、上記の発明で説明したことが成立する。
【発明の効果】
【0017】
この発明によれば、線路に近寄るカラスあるいは駅構内の架線に近寄るカラスのみを検知して忌避することができる。
【0018】
また、この発明によれば、駐車場に近寄るカラスあるいはごみ収集所に近寄るカラスのみを検知して忌避することができる。
【図面の簡単な説明】
【0019】
【図1】この発明の第1の実施の形態によるカラス忌避システムを示す略線図である。
【図2】この発明の第1の実施の形態によるカラス忌避システムを示す略線図である。
【図3】この発明の第1の実施の形態によるカラス忌避システムにおいて測域センサから出射されるレーザビームが面状に走査される様子を示す略線図である。
【図4】この発明の第1の実施の形態によるカラス忌避システムにおいて測域センサが取付金具により電化柱に取り付けられている様子を示す略線図である。
【図5】この発明の第1の実施の形態によるカラス忌避システムにおいてソーラーパネルの設置方法を示す略線図である。
【図6】この発明の第1の実施の形態によるカラス忌避システムにおいてソーラーパネルの設置に用いる杭および2分割フランジ型金具を示す略線図である。
【図7】この発明の第1の実施の形態によるカラス忌避システムにおいてソーラーパネルの設置に用いる杭架台の要部を示す略線図である。
【図8】この発明の第1の実施の形態によるカラス忌避システムにおける制御ボックス、バッテリーボックスおよびソーラーパネルの電気系統を示す略線図である。
【図9】この発明の第1の実施の形態によるカラス忌避システムにおける制御ボックスの制御系を示す略線図である。
【図10】この発明の第1の実施の形態によるカラス忌避システムにおける制御ボックスの電源系を示す略線図である。
【図11】この発明の第1の実施の形態によるカラス忌避システムにおけるバッテリーボックスの内部系統を示す略線図である。
【図12】この発明の第2の実施の形態によるカラス忌避システムを示す略線図であ 。
【図13】この発明の第3の実施の形態によるカラス忌避システムを示す略線図である。
【図14】この発明の第4の実施の形態によるカラス忌避システムを示す略線図である。
【図15】この発明の第5の実施の形態によるカラス忌避システムを示す略線図である。
【発明を実施するための形態】
【0020】
以下、発明を実施するための形態(以下「実施の形態」という)について説明する。
〈第1の実施の形態〉
第1の実施の形態によるカラス忌避システムについて説明する。このカラス忌避システムは、鉄道の線路への置石などの被害を防止するために線路に近寄るカラスを忌避するためのものである。
【0021】
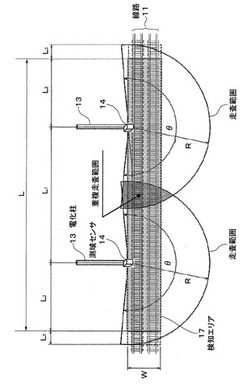
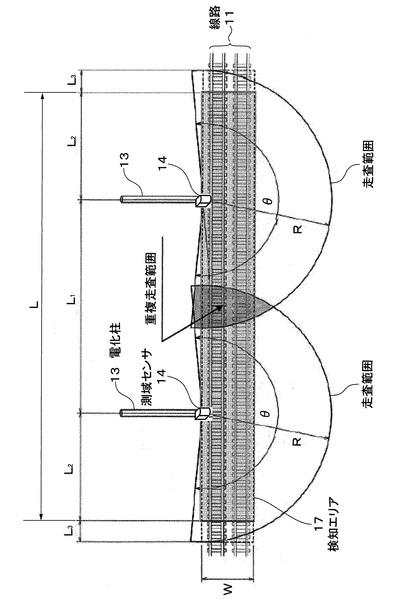
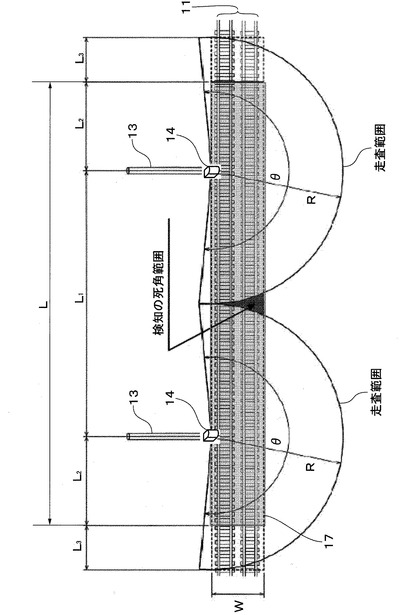
図1および図2はこのカラス忌避システムを示す。ここで、図1は平面図、図2は線路を横断する方向の断面図である。
【0022】
図1および図2に示すように、このカラス忌避システムにおいては、鉄道の線路11の路盤12の脇の地面Gに鉛直に設置された電化柱13に測域センサ14およびカラス忌避音発生装置のスピーカ15が設置されている。この場合、間隔L1 で互いに隣接して設置された2本の電化柱13のそれぞれに測域センサ14およびスピーカ15が設置されている。これらの電化柱13の間隔L1 は例えば50mあるいは60mであるが、これに限定されるものではない。これらの電化柱13に設置されたスピーカ15の一方は必要に応じて設置しなくてもよい。
【0023】
測域センサ14は、レーザビーム16を出射するレーザ光源およびこのレーザ光源から出射されるレーザビーム16を検出するための光センサ(受光素子)を有する。レーザビーム16の波長およびエネルギーは、必要に応じて選ばれるが、好適には、カラスおよび人間に障害を与えず、しかもカラスに照射された時に効率的に反射される波長およびエネルギーとされる。測域センサ14は、レーザビーム16が出射される前面が線路11側を向くように設置されている。例えば、測域センサ14の前面の上部からレーザビーム16が出射され、カラスなどの物体に照射されて反射された光が測域センサ14の前面の下部に入射して検出される。
【0024】
図1に示すように、測域センサ14から出射されるレーザビーム16は、レーザ光源からのレーザビーム出射部を中心として一平面内、典型的には水平面内を所定の角度θの範囲内で走査されるようになっている。θは必要に応じて選ばれるが、好適には、レーザビーム16が検知エリア17内を完全に走査するようにするために180°以上に選ばれ、具体的には例えば185°以上200°以下、例えば190°に選ばれる。レーザビーム16の走査範囲の半径はRである。この場合、検知エリア17は、図1に示す破線で囲まれた長さL、幅Wの細長い長方形の領域に設定される。この検知エリア17内には、上下線の線路11のうちの長さLの部分が含まれる。一方の電化柱13と検知エリア17の長手方向に垂直な一方の辺との間の距離および他方の電化柱13と検知エリア17の長手方向に垂直な他方の辺との間の距離はいずれもL2 である。また、検知エリア17の長手方向に垂直な一方の辺とレーザビーム16の走査範囲の一端との間の距離および検知エリア17の長手方向に垂直な他方の辺とレーザビーム16の走査範囲の他端との間の距離はいずれもL3 である。この場合、互いに隣接する2本の電化柱13にそれぞれ設置された測域センサ14から出射されるレーザビーム16の走査範囲は、検知エリア17内の線路11上において互いに重複している。図3に、測域センサ14から出射されるレーザビーム16が一平面内を走査される様子を模式的に示す。
【0025】
R、θ、L、L1 、L2 、L3 、Wの具体例を挙げると、Rは30m、θは190°、Lは100m、L1 は50m、L2 は25m、L3 は5m、Wは12mである。
【0026】
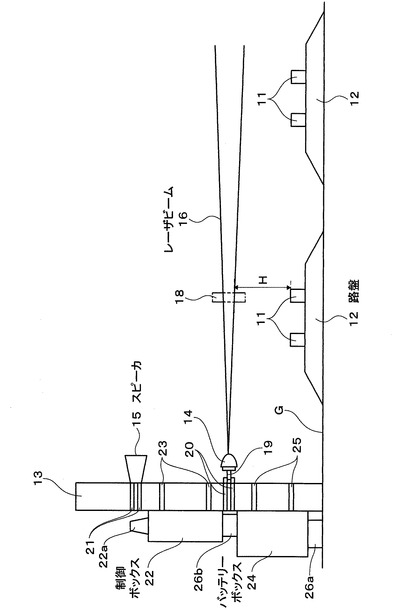
図2に示すように、検知エリア17内におけるレーザビーム16の下端は、線路11のレール面からの高さがHである。Hは、レーザビーム16の走査により、線路11に侵入するカラスのみを検出し、線路11を走行する列車、線路11に何らかの理由で立ち入る人、線路11に侵入するカラス以外の諸動物を検出しないように選ばれる。具体的には、Hは、好適には、検知エリア16の四隅において20cm以上60cm以下、より好適には30cm以上50cm以下、さらに好適には35cm以上45cm以下、例えば40cmに選ばれる。
【0027】
ここで、測域センサ14の設置高さ、従ってレーザビーム16の下端の、レール面からの高さHの調整は、例えば次のようにして行うことができる。すなわち、図2に示すように、線路11のレール面の上方にバー状のレーザチェッカー18を設置し、測域センサ14のレーザ光源から出射されるレーザビーム16をこのレーザチェッカー18に照射する。このレーザチェッカー18では、レーザビーム16を受けている部分の発光ダイオードが例えば赤色に点灯する。そこで、レール面から、点灯している一番下の発光ダイオードまでの距離が所定の高さになるように電化柱13に対する測域センサ14の取り付け位置を調整する。
【0028】
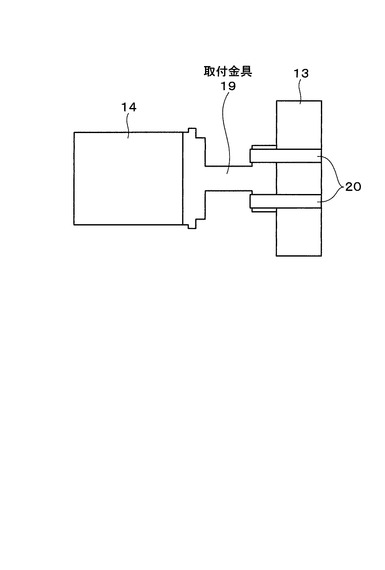
図4に示すように、測域センサ14は取付金具19に取り付けられ、この取付金具19が取付バンド20によって電化柱13に取り付けられている。取付金具19は、上下左右に最大傾斜角度90°まで角度調整ができるようになっている。
【0029】
図2に示すように、スピーカ15は、電化柱13の、測域センサ14の上方の部位に取り付けられている。この場合、スピーカ15は、取付バンド21によって電化柱13に取り付けられている。スピーカ15は、制御ボックス22内に設けられたカラス忌避音発生装置と接続されており、このカラス忌避音発生装置によりその動作が制御されるようになっている。制御ボックス22は、取付バンド23によって電化柱13の、線路11と反対側の部位に取り付けられている。測域センサ14も、制御ボックス22により制御されるようになっている。制御ボックス22の電源(例えば、AC100V)は、電化柱13から供給してもよいが、この場合には、バッテリーボックス24から供給されるようになっている。このバッテリーボックス24は、取付バンド25によって、電化柱13の、制御ボックス22の下方の部位に取り付けられている。バッテリーボックス24と地面Gとの間には、このバッテリーボックス24を支持するための支持台26aが設置されている。同様に、制御ボックス22とバッテリーボックス24との間には、制御ボックス22を支持するための支持台26bが設置されている。
【0030】
バッテリーボックス24には、一つまたは複数のバッテリーが内蔵されている。この場合、各バッテリーには、ソーラーパネルが接続されており、このソーラーパネルによる発電で得られた電気により各バッテリーの充電が行われるようになっている。このソーラーパネルは、線路11の路盤12ののり肩に設置してもよいし、のり面に設置してもよいし、のり肩およびのり面の双方に設置してもよい。
【0031】
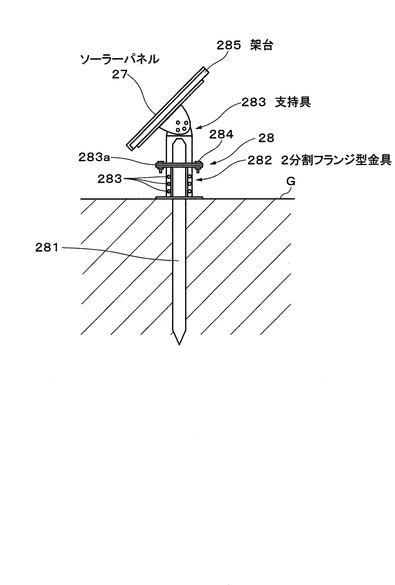
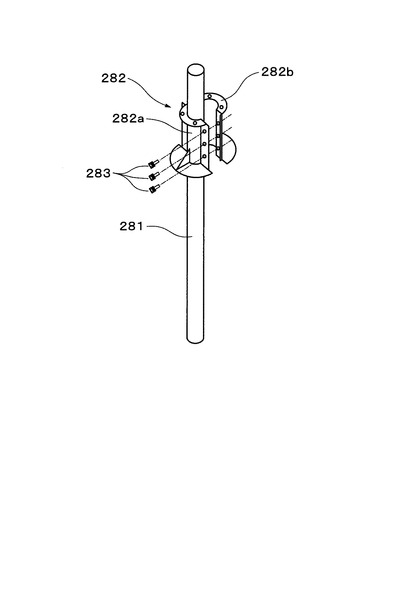
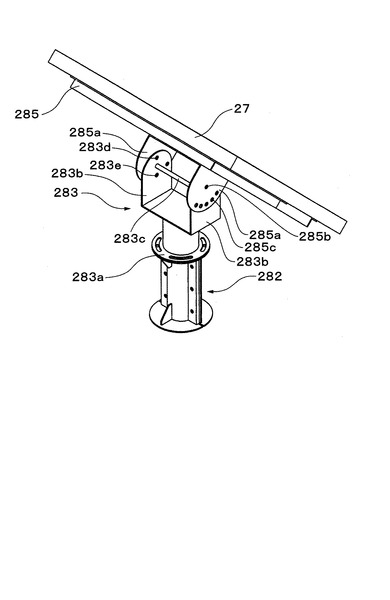
図5に示すように、ソーラーパネル27は、杭架台28に設置される。杭架台28は、地面Gに打ち込まれる先端が尖った円柱状の杭281およびこの杭281の外周面に取り付けられた2分割フランジ型金具282を有する。図6に示すように、2分割フランジ型金具282の第1の部分282aと第2の部分282bとはボルト283によって互いに締結されている。第1の部分282aの下部フランジおよび第2の部分282bの下部フランジは地面Gに接している。杭281に対する2分割フランジ型金具282の取り付け位置によってソーラーパネル27の設置高さを調整することができるようになっている。2分割フランジ型金具282の第1の部分282aの上部フランジおよび第2の部分282bの上部フランジの上にはソーラーパネル27の支持用の支持具283が設置されている。この支持具283の下部フランジ283aは、2分割フランジ型金具282の第1の部分282aの上部フランジおよび第2の部分282bの上部フランジとボルト284によって締結されている。図7に示すように、支持具283の上部には、半円部とこれに連なる長方形部とが一体になった形状を有する一対の支持板283bが互いに平行に設けられている。これらの支持板283bの半円部の中心間にはこれらの支持板283bを互いに平行に保持するための支持棒283cが設けられている。これらの支持板283bに対して、ソーラーパネル27が取り付けられる架台285の背面にボルト(図示せず)によって締結された一対の支持板285aが、2本のボルト(図示せず)によって取り付けられている。支持板285aは、半円部とこれに連なる長方形部とが一体になった形状を有する。1本のボルトは、支持板285aの半円部の中心に設けられた穴285bと支持板283bの先端部に設けられた穴283dとを通っている。もう1本のボルトは、支持板285aの半円部の円周方向の複数箇所(例えば、3箇所)に設けられた穴285cのうちのいずれか一つと支持板283bの二等分線上の所定の位置に設けられた穴283eとを通っており、これらの支持板283b、285a同士を互いに締結している。支持板285aの半円部の円周方向の複数箇所に設けられた穴285cのうちのいずれを使うかによって、架台285の傾斜角度、従ってソーラーパネル27の水平面に対する傾斜角度を段階的に調整することができるようになっている。例えば、水平方向と鉛直方向との間の90°の範囲内でソーラーパネル27の傾斜角度を調整することができる。こうすることで、ソーラーパネル27の傾斜角度を設置位置の日照の状況に応じて最適な角度に設定することができる。
【0032】
杭架台28の各部の主要な大きさの一例を挙げると次の通りである。杭281の長さは1500mm、杭281の地面Gに打ち込まれる長さ、つまり杭281の先端と、杭281に取り付けられる2分割フランジ型金具282の第1の部分282aの下部フランジおよび第2の部分282bの下部フランジの底面との間の距離は1000mm、杭281の直径は60.5mmである。杭281の材質は鉄鋼である。2分割フランジ型金具282の高さは200mm、フランジ部の直径は150mmである。2分割フランジ型金具282の材質は鉄鋼である。支持具283の高さは200mm、2枚の支持板283bの両端間の距離は200mmである。支持具283の材質は鉄鋼である。架台285の大きさはソーラーパネル27に応じて決められる。架台285の材質は例えばステンレス鋼(SUS304)である。
【0033】
ソーラーパネル27の発電電力は必要に応じて選ばれ、特に限定されないが、例えば40Wである。この場合、40Wのソーラーパネル27の大きさは例えば532mm×620mmである。ソーラーパネル27の種類も特に限定されず、例えば単結晶シリコン型、多結晶シリコン型、CIS型、色素増感太陽電池型などのいずれであってもよい。
【0034】
夜間に杭架台28の位置が分かるようにするために、必要に応じて、架台285の外周面や支持具283の下部の外周などに反射シールを貼り付けてもよい。
【0035】
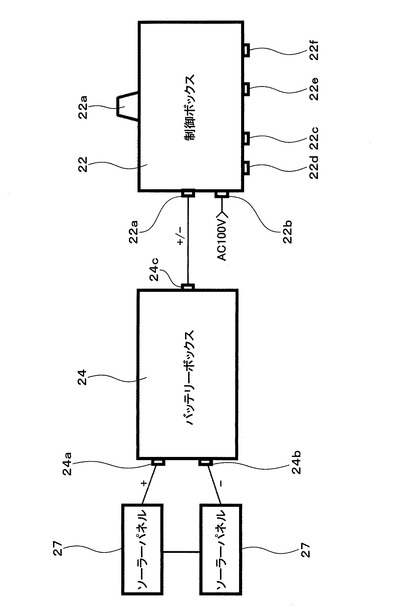
制御ボックス22、バッテリーボックス24およびソーラーパネル27の電気系統の一例を図8に示す。図8に示すように、制御ボックス22は、バッテリーボックス24から電源を供給することができるようになっているほか、AC100Vの電源を供給することができるようになっている。バッテリーボックス24には:ソーラーパネル27で発電された電気が充電されるようになっている。この場合、バッテリーボックス24の端子24a、24b間には2台のソーラーパネル27が接続されているが、これに限定されるものではなく、1台のソーラーパネル27が接続されてもよい。制御ボックス22の電源としてAC100Vを用いる場合には、バッテリーボックス24およびソーラーパネル27は設置しなくてもよい。バッテリーボックス24の電源出力用の端子24cは制御ボックス22の電源入力用の端子22aと接続されている。制御ボックス22には、AC100V用の端子22bが設けられている。制御ボックス22にはそれぞれ測域センサ14およびスピーカ15に電源を供給する端子22c、22dのほかに、予備の端子、例えば端子22e、22fも設けられている。これらの端子22e、22fは、例えば、2台目の測域センサ14、あるいはさらに3台目の測域センサ14を用いる場合にそれらと接続するために用いることができる。制御ボックス22の上部には、カラス忌避光を発生するためのライト22aが取り付けられている。
【0036】
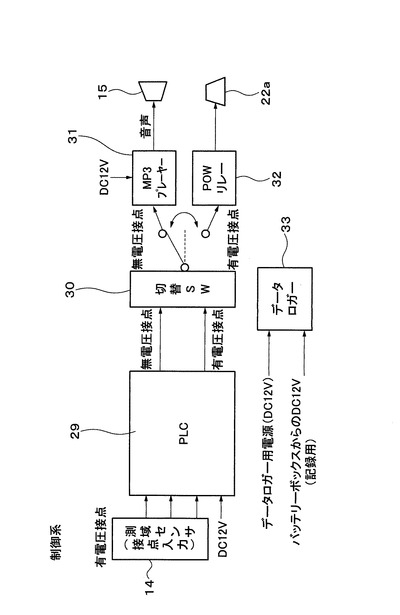
制御ボックス22の内部系統について説明する。図9は制御ボックス22の制御系、図10は電源系を示す。図9に示すように、制御系においては、測域センサ14の出力端子が:プログラマブルロジックコントローラ(PLC)29の入力端子(有電圧接点)に接続されている。PLC29の電源端子には、直流電源、例えばDC12Vが供給されている。PLC29の無電圧接点および有電圧接点は切替スイッチ30と接続されている。切替スイッチ30は:無電圧接点または有電圧接点に切り替えることができるようになっている。切替スイッチ30が無電圧接点に切り替わるとMP3プレーヤー31に接続され、このMP3プレーヤー31により生成される音声信号がスピーカ15に送られてカラス忌避音が放鳴される。MP3プレーヤー31にはDC12Vが供給される。切替スイッチ30が有電圧接点に切り替わるとパワーリレー32に接続され、このパワーリレー32が動作して信号がライト22aに送られてこのライト22aからカラス忌避光(例えば、黄色の光)が発生する。スピーカ15からのカラス忌避音の放鳴とライト22aからのカラス忌避光の発生とは同時に行ってもよいし、個別に行ってもよい。制御系には、データロガー33が含まれる。このデータロガー33は、忌避音放鳴日時(接点監視)、カラスの検知、カラス忌避音の放鳴日時、カラス忌避音の発生回数、カラスを検知してから次にカラスを検知するまでの経過時間などのデータ、バッテリー電圧低下日時、バッテリー電圧復帰日時のデータなどをメモリに記録・保存する。メモリの容量は必要に応じて選ばれるが、例えば2GBである。夕方〜早朝の間(電源断〜復帰の稼働時間外)のデータは保存しない。例えばメモリ容量が2GBの場合には、サンプリング周期を100msとすると、約202日間分(約6カ月分)のデータを記録することができる。
【0037】
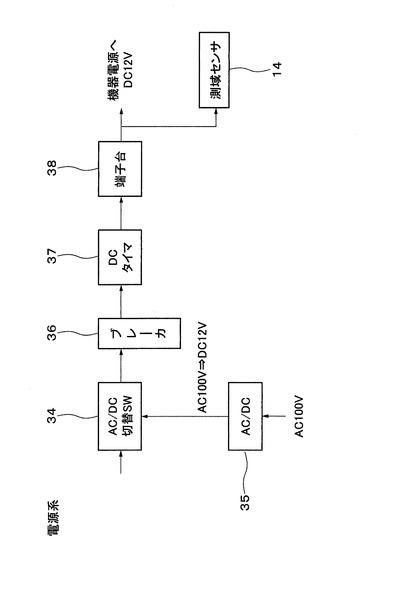
図10に示すように、制御ボックス22の電源系においては、AC/DC切替スイッチ34により、バッテリーボックス24から供給されるDC12VまたはAC/DC変換器35によりAC100VをAC/DC変換することにより得られるDC12Vを切り替えることができるようになっている。AC/DC切替スイッチ34により選択されたDC12Vは、ブレーカ36、DCタイマ37および端子台38を経由して制御系のPLC29、MP3プレーヤー31などや測域センサ14に供給されるようになっている。
【0038】
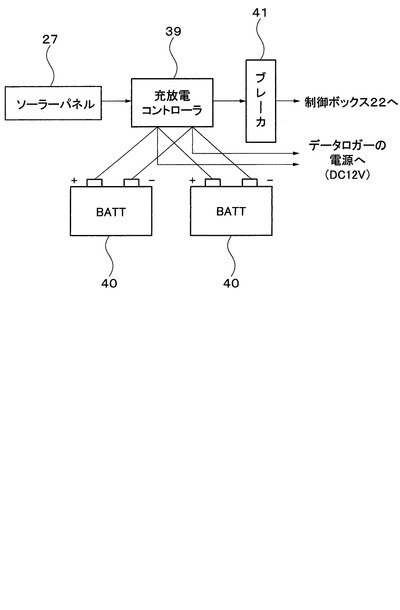
図11はバッテリーボックス24の内部系統を示す。図11に示すように、バッテリーボックス24においては、充放電コントローラ39により、ソーラーパネル27によるバッテリー40の充電またはバッテリー40からの放電が制御されるようになっている。充放電コントローラ39から供給されるDC12Vはブレーカ41を通って制御ボックス22に供給されるとともに、制御ボックス22内のデータロガー33に供給される。
【0039】
次に、上述のように構成されたカラス忌避システムの動作方法について説明する。
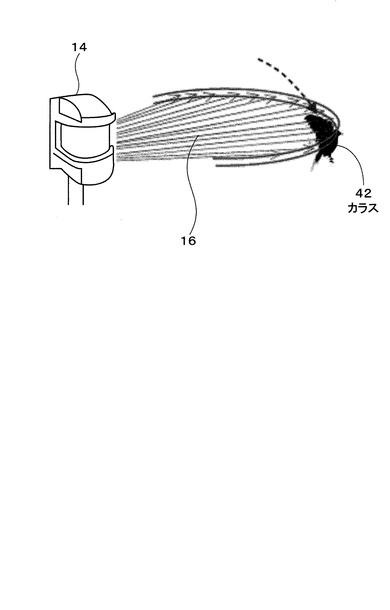
図1に示すように、カラス忌避システムの稼働中は、測域センサ14からのレーザビーム16が、検知エリア17において所定の周期で繰り返し面状に走査される。検知エリア17内においてレーザビーム16が何らかの物体に照射されて反射された反射光が、測域センサ14の光センサにより検出されたとする。図3には、一例として、その物体がカラス42である場合にこのカラス42にレーザビーム16が照射されている様子を示す。この最初の検出から10ミリ秒以上1.5秒以内にレーザビーム16が光センサにより再度検出されなかったとき、その物体はカラスであると判定し、測域センサ14からの検出信号が、図9に示すように、制御ボックス22のPLC29に供給される。これによって、MP3プレーヤー31が作動してスピーカ15からカラス忌避音が放鳴される。こうして放鳴されるカラス忌避音により、線路11に近寄ろうとしたカラス42は、カラス忌避音から逃れようとして線路11から立ち去る。こうして、カラス42を線路11から忌避することができる。一方、最初の検出から10ミリ秒以上1.5秒以内にレーザビーム16が光センサにより再度検出されたときは、その物体は、カラス42ではなく、線路11上を走行する列車や線路11内に何らかの理由に立ち入った人やカラス以外の動物などであると判断し、カラス忌避音を放鳴しない。
【0040】
また、カラス42の検知、カラス忌避音の放鳴日時、カラス忌避音の発生回数、カラス42を検知してから次にカラス42を検知するまでの経過時間などのデータを所定の期間にわたってデータロガー33に記録・保存する。こうして記録・保存されたデータから、カラス42の行動パターンを調べることができる。例えば、1日のうちの放鳴回数が多い時間帯や1年のうちの放鳴回数が多い期間などを把握することができる。こうして調べたカラス42の行動パターンに応じて測域センサ14を制御することにより、例えば、カラス42が線路11にほとんど飛来しない時間帯あるいは期間内には、レーザビーム16を走査する時間帯あるいは期間を限定することができる。こうすることで、測域センサ14の低消費電力化を図ることができ、ひいてはカラス忌避システムの低消費電力化を図ることができる。
【0041】
実際にこのカラス忌避システムを設置してカラスを忌避する実験を行った。ただし、測域センサ14として、北洋電機株式会社製のレーザ式測域センサ(型番UXM−30LN−P)を用いた。このレーザ式測域センサは、レーザ光源として発振波長905nmの半導体レーザを用い、測距範囲は0.1〜30m、走査角度(θ)は190°、角度分解能は0.25°、走査時間は50ms/走査、測距原理は飛行時間(Time of Flight) 方式(パルス式)である。レーザビーム16は30mで約10cmの幅に広がる。図1のL、L1 、L2 、L3 、Wについては、Lは100m、L1 は50m、L2 は25m、L3 は5m、Wは12mとした。この実験の結果、カラスの忌避効果を確認することができた。また、線路11を通過する列車、線路11に立ち入る人、カラス以外の動物の誤検知もなかった。
【0042】
以上のように、この第1の実施の形態によるカラス忌避システムによれば、線路11上に飛来するカラスのみを検知して忌避することができる。また、このカラス忌避システムは、測域センサ14、スピーカ15、制御ボックス22などの電源をソーラーパネル27によって発電した電力によってまかなうことができるため、電化柱13から供給される電源を使用しないでも稼働させることができる。また、データロガー33に記録・保存されたデータを利用することにより、カラス42の行動パターンを分析することができ、その分析結果をカラス忌避システムの稼働方法にフィードバックすることができ、それによってカラス忌避システムの低消費電力化を図ることができる。
【0043】
〈第2の実施の形態〉
第2の実施の形態によるカラス忌避システムについて説明する。このカラス忌避システムは、第1の実施の形態によるカラス忌避システムと同様に、鉄道の線路への置石などの被害を防止するために線路に近寄るカラスを忌避するためのものである。
【0044】
図12はこのカラス忌避システムを示す。図12に示すように、このカラス忌避システムにおいては、互いに隣接する2本の電化柱13にそれぞれ設置された測域センサ14から出射されるレーザビーム16の走査範囲は互いに接しており、検知エリア17内の線路11上において互いに重複していない。この場合、検知エリア17内の線路11上においてレーザビーム16により走査されない範囲が発生し、この範囲は検知の死角範囲となるが、実際上カラス42の検知に支障が生じることはない。このカラス忌避システムの上記以外のことは、第1の実施の形態によるカラス忌避システムと同様である。
【0045】
R、θ、L、L1 、L2 、L3 、Wの具体例を挙げると、Rは30m、θは190°、Lは100m、L1 は60m、L2 は20m、L3 は10m、Wは12mである。
【0046】
この第2の実施の形態によれば、第1の実施の形態と同様な利点を得ることができる。
【0047】
〈第3の実施の形態〉
第3の実施の形態によるカラス忌避システムについて説明する。このカラス忌避システムは、鉄道の駅構内の架線の被害を防止するために架線に近寄るカラスを忌避するためのものである。
【0048】
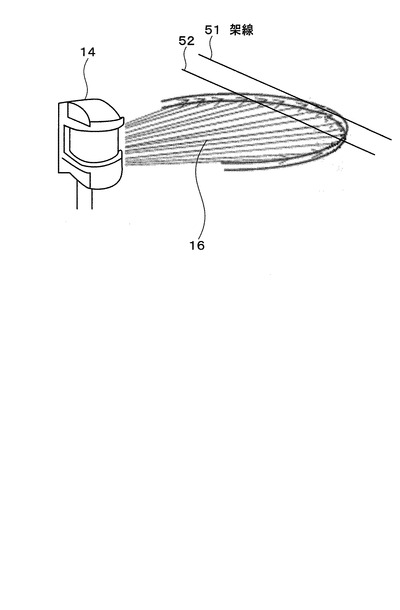
図13は駅構内の架線51、52を示す。測域センサ14は、この測域センサ14からのレーザビーム16の下端の高さが第1の実施の形態と同様にHとなる高さに設置する。レーザビーム16の走査面は水平面であってもよいし、測域センサ14から架線51、52に向かって上または下に傾斜した傾斜面であってもよい。
【0049】
このカラス忌避システムの上記以外の構成は第1の実施の形態によるカラス忌避システムと同様である。
【0050】
この第3の実施の形態によれば、駅構内の架線51、52にカラスが近寄らないようにすることができ、このカラスによる被害、例えば糞害などを防止することができる。
【0051】
〈第4の実施の形態〉
第4の実施の形態によるカラス忌避システムについて説明する。このカラス忌避システムは、駐車場に停車する自動車、バイク、自転車などの被害を防止するために駐車場に近寄るカラスを忌避するためのものである。
【0052】
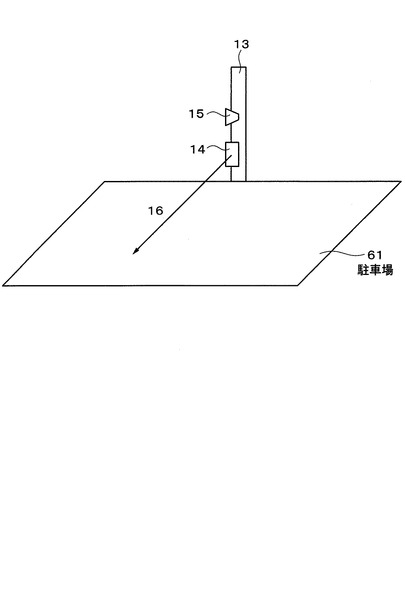
図14に示すように、このカラス忌避システムにおいては、駐車場61の中または外の所定位置に電化柱13が設置されている。この電化柱13に第1の実施の形態と同様に測域センサ14およびスピーカ15が設置されている。測域センサ14は、この測域センサ14からのレーザビーム16の下端の高さが駐車場61の地面からH’の高さとなる位置に設置する。H’は2m以上6m以下とする。レーザビーム16の走査面は例えば水平面とするが、これに限定されるものではない。測域センサ14からのレーザビーム16の走査範囲は駐車場61の全範囲あるいは少なくとも主要な範囲をカバーするようにする。図示は省略するが、第1の実施の形態と同様に制御ボックス22およびバッテリーボックス24が設置されている。このカラス忌避システムの上記以外のことは、その性質に反しない限り、第1の実施の形態によるカラス忌避システムと同様である。
【0053】
この第4の実施の形態によれば、駐車場61にカラスが近寄らないようにすることができ、このカラスによる被害、例えば糞害などを防止することができる。
【0054】
〈第5の実施の形態〉
第5の実施の形態によるカラス忌避システムについて説明する。このカラス忌避システムは、ごみ収集所の被害を防止するためにごみ収集所に近寄るカラスを忌避するためのものである。
【0055】
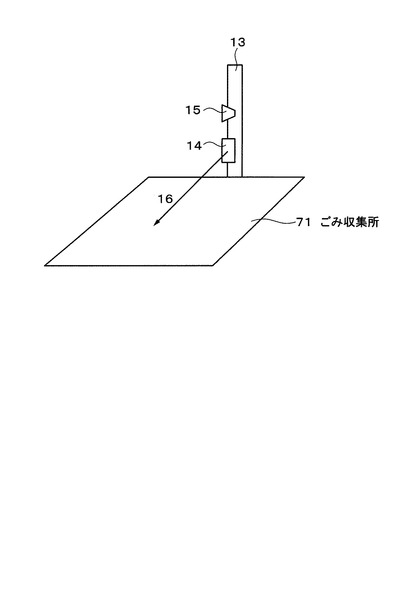
図15に示すように、このカラス忌避システムにおいては、ごみ収集所71の中または外の所定位置に電化柱13が設置されている。この電化柱13に第1の実施の形態と同様に測域センサ14およびスピーカ15が設置されている。測域センサ14は、この測域センサ14からのレーザビーム16の下端の高さがごみ収集所71の地面からH’の高さとなる位置に設置する。H’は2m以上6m以下とする。レーザビーム16の走査面は例えば水平面とする。測域センサ14からのレーザビーム16の走査範囲はごみ収集所71の全範囲あるいは少なくとも主要な範囲をカバーするようにする。図示は省略するが、第1の実施の形態と同様に制御ボックス22およびバッテリーボックス24が設置されている。このカラス忌避システムの上記以外のことは、その性質に反しない限り、第1の実施の形態によるカラス忌避システムと同様である。
【0056】
この第5の実施の形態によれば、ごみ収集所71にカラスが近寄らないようにすることができ、このカラスによる被害、例えばごみ荒らしなどを防止することができる。
【0057】
以上、この発明の実施の形態について具体的に説明したが、この発明は、上述の実施の形態に限定されるものではなく、この発明の技術的思想に基づく各種の変形が可能である。
【0058】
例えば、上述の実施の形態において挙げた数値、構造、構成、形状、材料などはあくまでも例に過ぎず、必要に応じてこれらと異なる数値、構造、構成、形状、材料などを用いてもよい。
【符号の説明】
【0059】
11…線路、12…路盤、13…電化柱、14…測域センサ、15…スピーカ、16…レーザビーム、17…検知エリア、18…レーザチェッカー、19…取付金具、20、21…取付バンド、22…制御ボックス、23…取付バンド、24…バッテリーボックス、25…取付バンド、26a、26b…支持台、27…ソーラーパネル、28…杭架台、29…PLC、30…切替スイッチ、31…MP3プレーヤー、32…パワーリレー、33…データロガー、34…AC/DC切替スイッチ、35…AC/DC変換器、36…ブレーカ、37…DCタイマ、38…端子台、39…充放電コントローラ、40…バッテリー、41…ブレーカ、51、52…架線、61…駐車場、71…ごみ収集所
【技術分野】
【0001】
この発明はカラス忌避システムに関し、例えば、鉄道線路、駅、駐車場、ごみ収集所などにおいてカラスによる各種の被害を防止するのに適用して好適なものである。
【背景技術】
【0002】
従来、鉄道線路において、カラスの悪戯による置石が原因の輸送障害が発生している。その対策として、これまでに、カラスが線路に近寄らないようにするために、オレンジ色のネットあるいは黄色のシートを線路間の路盤上に設置したり、反射材、風車、カラス模型、黄色リボンなどを線路のそばに設置したりしていた。
【0003】
しかしながら、これらの方法では、材料の設置・撤去あるいは材料の劣化などで多大な労力・コストが必要となったり、カラスの学習能力により忌避効果が持続しなかったりするなどの問題があった。
【0004】
そこで、本出願人らは、線路脇の電化柱に線路上の物体を認識するためのセンサーを取り付け、このセンサーを60m間隔で2台設置し、このセンサーにより線路上で物体を1秒程度認識したとき、スピーカからカラスが仲間に危険を知らせる鳴き声を3分間流すことにより、線路上からカラスを排除する試みを行った(非特許文献1参照。)。
【0005】
なお、カラスなどの鳥獣による害を防止するための技術として、鳥獣の獲物への接近を鳥獣の発する赤外線で感知して、突発的な強烈光の点滅と威嚇音の発射とを行う技術(特許文献1参照。)、鉄塔に飛来した鳥を鳥感知センサにより感知し、鳥類、猛獣などの鳴声の合成音、カラスの警戒鳴声を複数種類記憶させた音声記憶回路からランダムに選択された威嚇音を周囲に発生させる技術(特許文献2参照。)などがある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−158372号公報
【特許文献2】特開平9−107865号公報
【非特許文献】
【0007】
【非特許文献1】2010年(平成22年)10月27日発行「岩手日報」第24頁(株式会社岩手日報社)
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、本発明者らの研究によれば、非特許文献1に記載された技術では、線路を走行する列車、線路内に侵入するカラス以外の諸動物(例えば、イタチ、モグラ、犬、猫など)、線路内に立ち入る人などを誤って検知してしまうという問題があった。
【0009】
そこで、この発明が解決しようとする課題は、線路に近寄るカラスあるいは駅構内の架線に近寄るカラスのみを検知して忌避することができるカラス忌避システムを提供することである。
【0010】
この発明が解決しようとする他の課題は、駐車場に近寄るカラスあるいはごみ収集所に近寄るカラスのみを検知して忌避することができるカラス忌避システムを提供することである。
【課題を解決するための手段】
【0011】
上記課題を解決するために、この発明は、
レーザ光源および光センサを含む測域センサと、
カラス忌避音発生装置とを有し、
上記測域センサは、上記レーザ光源からのレーザビームが、検知エリア内において面状に走査されるように構成され、
上記検知エリア内において上記レーザビームが物体に照射されて反射された光が上記光センサにより検出され、10ミリ秒以上1.5秒以内に上記レーザビームが上記光センサにより再度検出されないとき、上記カラス忌避音発生装置からカラス忌避音を発生させるように構成されていることを特徴とするカラス忌避システムである。
【0012】
このカラス忌避システムを鉄道線路へのカラスによる置石などの被害を未然に防止するために用いる場合には、測域センサは、典型的には、鉄道の線路に沿って設置される電化柱に設置されるが、これに限定されるものではなく、設置場所は必要に応じて選ぶことができる。検知エリアはカラスの検知を行うエリアを意味し、所定範囲の線路を含む。典型的には、検知エリア内においてレーザビームが物体に照射されて反射された光が光センサにより検出され、10ミリ秒以上1.5秒以内にレーザビームが光センサにより再度検出されたとき、物体は列車、人またはカラス以外の動物(例えば、イタチ、モグラ、犬、猫など)であると判断し、カラス忌避音発生装置からカラス忌避音を発生させないように構成される。ここで、10ミリ秒以上1.5秒以内にレーザビームが光センサにより再度検出されないときには、物体はカラスであると判断し、10ミリ秒以上1.5秒以内にレーザビームが光センサにより再度検出されたときには、物体は列車、人またはカラス以外の動物であると判断することとしたのは、本発明者らが実際にカラスの行動、列車の走行、線路に立ち入る人の行動、カラス以外の動物の行動を長期にわたって観察した結果に基づくものである。測域センサは、好適には、検知エリアにおけるレーザ光源からのレーザビームの下端が線路のレール面から20cm以上60cm以下の高さに位置するように所定の場所,例えば電化柱に設置される。ここで、検知エリアにおけるレーザ光源からのレーザビームの下端が線路のレール面から20cm以上60cm以下の高さに位置するようにしたのは、上記と同様に、本発明者らが実際にカラスの行動、列車の走行、線路に立ち入る人の行動、カラス以外の動物の行動を長期にわたって観察した結果に基づくものである。測域センサは一つだけ用いてもよいが、検知エリアを広げるためには、測域センサは、少なくとも互いに離れた2箇所、例えば少なくとも互いに隣接する2本の電化柱にそれぞれ設置される。この場合、好適には、少なくとも互いに離れた2箇所、例えば少なくとも互いに隣接する2本の電化柱に設置されたそれぞれの測域センサのレーザ光源からのレーザビームの走査範囲が少なくとも線路上において互いに重なるようにする。典型的には、例えば電化柱の、測域センサより高い位置にスピーカが設置され、カラス忌避音発生装置により発生されるカラス忌避音をこのスピーカから線路の上に流すようにする。カラス忌避システムに必要な電力は、電化柱から得ることもできるが、バッテリーから供給してもよい。バッテリーの充電は、クリーンエネルギーの使用の観点からは、好適には、太陽光を用いて行う。この場合、このカラス忌避システムは、測域センサおよびカラス忌避音発生装置に電力を供給するためのソーラーパネルをさらに有する。このソーラーパネルの設置箇所は必要に応じて選ばれる。好適には、ソーラーパネルは、杭の上部に取り付けられ、水平面に対する傾斜角度が調節可能に構成された取付金具の上に設置される。この杭は、好適には、線路の路盤ののり肩および/またはのり面に打ち込まれる。
【0013】
このカラス忌避システムは、必要に応じて、カラスの検知および忌避音の発生の回数ならびにカラスを検知してから次にカラスを検知するまでの経過時間のデータを記録保存するように構成される。こうして記録保存されたデータは、このカラス忌避システムの設置場所におけるカラスの行動を示すため、このデータを分析することにより、このカラス忌避システムによるカラスの忌避をより効率的かつ有効に行うことが可能となる。
【0014】
一方、このカラス忌避システムを駅構内の架線の被害を未然に防止するために用いる場合には、測域センサは、レーザ光源からのレーザビームが、駅構内の架線の付近を照射するように面状に走査されるように構成される。この場合、このレーザビームの走査面は、水平面内であってもよいし、架線より低い位置あるいは高い位置から架線に向かって傾斜した傾斜面内であってもよい。その他のことは、その性質に反しない限り、上記と同様である。
【0015】
また、この発明は、
レーザ光源および光センサを含む測域センサと、
カラス忌避音発生装置とを有し、
上記測域センサは駐車場またはごみ収集所の所定の高さに設置され、
上記測域センサは、上記レーザ光源からのレーザビームが、検知エリア内において面状に走査されるように構成され、
上記検知エリア内において上記レーザビームが物体に照射されて反射された光が上記光センサにより検出され、10ミリ秒以上1.5秒以内に上記レーザビームが上記光センサにより再度検出されないとき、上記カラス忌避音発生装置からカラス忌避音を発生させるように構成されていることを特徴とするカラス忌避システムである。
【0016】
この場合、測域センサは、好適には、レーザ光源からのレーザビームの下端が駐車場またはごみ収集所の地面から2m以上6m以下の高さに位置するように設置される。測域センサは、例えば、電化柱に設置されるが、これに限定されるものではなく、設置場所は必要に応じて選ぶことができる。測域センサは一つだけ用いてもよいが、検知エリアを広げるためには、測域センサは、少なくとも互いに離れた2箇所、例えば少なくとも互いに隣接する2本の電化柱にそれぞれ設置される。この場合、好適には、少なくとも互いに離れた2箇所、例えば少なくとも互いに隣接する2本の電化柱に設置されたそれぞれの測域センサのレーザ光源からのレーザビームの走査範囲が少なくとも駐車場またはごみ収集所において互いに重なるようにする。典型的には、駐車場またはごみ収集所あるいはそれらの付近の所定の位置にスピーカが設置され、忌避音発生装置により発生される音をこのスピーカから駐車場またはごみ収集所の上に流す。この発明の上記以外のことは、その性質に反しない限り、上記の発明で説明したことが成立する。
【発明の効果】
【0017】
この発明によれば、線路に近寄るカラスあるいは駅構内の架線に近寄るカラスのみを検知して忌避することができる。
【0018】
また、この発明によれば、駐車場に近寄るカラスあるいはごみ収集所に近寄るカラスのみを検知して忌避することができる。
【図面の簡単な説明】
【0019】
【図1】この発明の第1の実施の形態によるカラス忌避システムを示す略線図である。
【図2】この発明の第1の実施の形態によるカラス忌避システムを示す略線図である。
【図3】この発明の第1の実施の形態によるカラス忌避システムにおいて測域センサから出射されるレーザビームが面状に走査される様子を示す略線図である。
【図4】この発明の第1の実施の形態によるカラス忌避システムにおいて測域センサが取付金具により電化柱に取り付けられている様子を示す略線図である。
【図5】この発明の第1の実施の形態によるカラス忌避システムにおいてソーラーパネルの設置方法を示す略線図である。
【図6】この発明の第1の実施の形態によるカラス忌避システムにおいてソーラーパネルの設置に用いる杭および2分割フランジ型金具を示す略線図である。
【図7】この発明の第1の実施の形態によるカラス忌避システムにおいてソーラーパネルの設置に用いる杭架台の要部を示す略線図である。
【図8】この発明の第1の実施の形態によるカラス忌避システムにおける制御ボックス、バッテリーボックスおよびソーラーパネルの電気系統を示す略線図である。
【図9】この発明の第1の実施の形態によるカラス忌避システムにおける制御ボックスの制御系を示す略線図である。
【図10】この発明の第1の実施の形態によるカラス忌避システムにおける制御ボックスの電源系を示す略線図である。
【図11】この発明の第1の実施の形態によるカラス忌避システムにおけるバッテリーボックスの内部系統を示す略線図である。
【図12】この発明の第2の実施の形態によるカラス忌避システムを示す略線図であ 。
【図13】この発明の第3の実施の形態によるカラス忌避システムを示す略線図である。
【図14】この発明の第4の実施の形態によるカラス忌避システムを示す略線図である。
【図15】この発明の第5の実施の形態によるカラス忌避システムを示す略線図である。
【発明を実施するための形態】
【0020】
以下、発明を実施するための形態(以下「実施の形態」という)について説明する。
〈第1の実施の形態〉
第1の実施の形態によるカラス忌避システムについて説明する。このカラス忌避システムは、鉄道の線路への置石などの被害を防止するために線路に近寄るカラスを忌避するためのものである。
【0021】
図1および図2はこのカラス忌避システムを示す。ここで、図1は平面図、図2は線路を横断する方向の断面図である。
【0022】
図1および図2に示すように、このカラス忌避システムにおいては、鉄道の線路11の路盤12の脇の地面Gに鉛直に設置された電化柱13に測域センサ14およびカラス忌避音発生装置のスピーカ15が設置されている。この場合、間隔L1 で互いに隣接して設置された2本の電化柱13のそれぞれに測域センサ14およびスピーカ15が設置されている。これらの電化柱13の間隔L1 は例えば50mあるいは60mであるが、これに限定されるものではない。これらの電化柱13に設置されたスピーカ15の一方は必要に応じて設置しなくてもよい。
【0023】
測域センサ14は、レーザビーム16を出射するレーザ光源およびこのレーザ光源から出射されるレーザビーム16を検出するための光センサ(受光素子)を有する。レーザビーム16の波長およびエネルギーは、必要に応じて選ばれるが、好適には、カラスおよび人間に障害を与えず、しかもカラスに照射された時に効率的に反射される波長およびエネルギーとされる。測域センサ14は、レーザビーム16が出射される前面が線路11側を向くように設置されている。例えば、測域センサ14の前面の上部からレーザビーム16が出射され、カラスなどの物体に照射されて反射された光が測域センサ14の前面の下部に入射して検出される。
【0024】
図1に示すように、測域センサ14から出射されるレーザビーム16は、レーザ光源からのレーザビーム出射部を中心として一平面内、典型的には水平面内を所定の角度θの範囲内で走査されるようになっている。θは必要に応じて選ばれるが、好適には、レーザビーム16が検知エリア17内を完全に走査するようにするために180°以上に選ばれ、具体的には例えば185°以上200°以下、例えば190°に選ばれる。レーザビーム16の走査範囲の半径はRである。この場合、検知エリア17は、図1に示す破線で囲まれた長さL、幅Wの細長い長方形の領域に設定される。この検知エリア17内には、上下線の線路11のうちの長さLの部分が含まれる。一方の電化柱13と検知エリア17の長手方向に垂直な一方の辺との間の距離および他方の電化柱13と検知エリア17の長手方向に垂直な他方の辺との間の距離はいずれもL2 である。また、検知エリア17の長手方向に垂直な一方の辺とレーザビーム16の走査範囲の一端との間の距離および検知エリア17の長手方向に垂直な他方の辺とレーザビーム16の走査範囲の他端との間の距離はいずれもL3 である。この場合、互いに隣接する2本の電化柱13にそれぞれ設置された測域センサ14から出射されるレーザビーム16の走査範囲は、検知エリア17内の線路11上において互いに重複している。図3に、測域センサ14から出射されるレーザビーム16が一平面内を走査される様子を模式的に示す。
【0025】
R、θ、L、L1 、L2 、L3 、Wの具体例を挙げると、Rは30m、θは190°、Lは100m、L1 は50m、L2 は25m、L3 は5m、Wは12mである。
【0026】
図2に示すように、検知エリア17内におけるレーザビーム16の下端は、線路11のレール面からの高さがHである。Hは、レーザビーム16の走査により、線路11に侵入するカラスのみを検出し、線路11を走行する列車、線路11に何らかの理由で立ち入る人、線路11に侵入するカラス以外の諸動物を検出しないように選ばれる。具体的には、Hは、好適には、検知エリア16の四隅において20cm以上60cm以下、より好適には30cm以上50cm以下、さらに好適には35cm以上45cm以下、例えば40cmに選ばれる。
【0027】
ここで、測域センサ14の設置高さ、従ってレーザビーム16の下端の、レール面からの高さHの調整は、例えば次のようにして行うことができる。すなわち、図2に示すように、線路11のレール面の上方にバー状のレーザチェッカー18を設置し、測域センサ14のレーザ光源から出射されるレーザビーム16をこのレーザチェッカー18に照射する。このレーザチェッカー18では、レーザビーム16を受けている部分の発光ダイオードが例えば赤色に点灯する。そこで、レール面から、点灯している一番下の発光ダイオードまでの距離が所定の高さになるように電化柱13に対する測域センサ14の取り付け位置を調整する。
【0028】
図4に示すように、測域センサ14は取付金具19に取り付けられ、この取付金具19が取付バンド20によって電化柱13に取り付けられている。取付金具19は、上下左右に最大傾斜角度90°まで角度調整ができるようになっている。
【0029】
図2に示すように、スピーカ15は、電化柱13の、測域センサ14の上方の部位に取り付けられている。この場合、スピーカ15は、取付バンド21によって電化柱13に取り付けられている。スピーカ15は、制御ボックス22内に設けられたカラス忌避音発生装置と接続されており、このカラス忌避音発生装置によりその動作が制御されるようになっている。制御ボックス22は、取付バンド23によって電化柱13の、線路11と反対側の部位に取り付けられている。測域センサ14も、制御ボックス22により制御されるようになっている。制御ボックス22の電源(例えば、AC100V)は、電化柱13から供給してもよいが、この場合には、バッテリーボックス24から供給されるようになっている。このバッテリーボックス24は、取付バンド25によって、電化柱13の、制御ボックス22の下方の部位に取り付けられている。バッテリーボックス24と地面Gとの間には、このバッテリーボックス24を支持するための支持台26aが設置されている。同様に、制御ボックス22とバッテリーボックス24との間には、制御ボックス22を支持するための支持台26bが設置されている。
【0030】
バッテリーボックス24には、一つまたは複数のバッテリーが内蔵されている。この場合、各バッテリーには、ソーラーパネルが接続されており、このソーラーパネルによる発電で得られた電気により各バッテリーの充電が行われるようになっている。このソーラーパネルは、線路11の路盤12ののり肩に設置してもよいし、のり面に設置してもよいし、のり肩およびのり面の双方に設置してもよい。
【0031】
図5に示すように、ソーラーパネル27は、杭架台28に設置される。杭架台28は、地面Gに打ち込まれる先端が尖った円柱状の杭281およびこの杭281の外周面に取り付けられた2分割フランジ型金具282を有する。図6に示すように、2分割フランジ型金具282の第1の部分282aと第2の部分282bとはボルト283によって互いに締結されている。第1の部分282aの下部フランジおよび第2の部分282bの下部フランジは地面Gに接している。杭281に対する2分割フランジ型金具282の取り付け位置によってソーラーパネル27の設置高さを調整することができるようになっている。2分割フランジ型金具282の第1の部分282aの上部フランジおよび第2の部分282bの上部フランジの上にはソーラーパネル27の支持用の支持具283が設置されている。この支持具283の下部フランジ283aは、2分割フランジ型金具282の第1の部分282aの上部フランジおよび第2の部分282bの上部フランジとボルト284によって締結されている。図7に示すように、支持具283の上部には、半円部とこれに連なる長方形部とが一体になった形状を有する一対の支持板283bが互いに平行に設けられている。これらの支持板283bの半円部の中心間にはこれらの支持板283bを互いに平行に保持するための支持棒283cが設けられている。これらの支持板283bに対して、ソーラーパネル27が取り付けられる架台285の背面にボルト(図示せず)によって締結された一対の支持板285aが、2本のボルト(図示せず)によって取り付けられている。支持板285aは、半円部とこれに連なる長方形部とが一体になった形状を有する。1本のボルトは、支持板285aの半円部の中心に設けられた穴285bと支持板283bの先端部に設けられた穴283dとを通っている。もう1本のボルトは、支持板285aの半円部の円周方向の複数箇所(例えば、3箇所)に設けられた穴285cのうちのいずれか一つと支持板283bの二等分線上の所定の位置に設けられた穴283eとを通っており、これらの支持板283b、285a同士を互いに締結している。支持板285aの半円部の円周方向の複数箇所に設けられた穴285cのうちのいずれを使うかによって、架台285の傾斜角度、従ってソーラーパネル27の水平面に対する傾斜角度を段階的に調整することができるようになっている。例えば、水平方向と鉛直方向との間の90°の範囲内でソーラーパネル27の傾斜角度を調整することができる。こうすることで、ソーラーパネル27の傾斜角度を設置位置の日照の状況に応じて最適な角度に設定することができる。
【0032】
杭架台28の各部の主要な大きさの一例を挙げると次の通りである。杭281の長さは1500mm、杭281の地面Gに打ち込まれる長さ、つまり杭281の先端と、杭281に取り付けられる2分割フランジ型金具282の第1の部分282aの下部フランジおよび第2の部分282bの下部フランジの底面との間の距離は1000mm、杭281の直径は60.5mmである。杭281の材質は鉄鋼である。2分割フランジ型金具282の高さは200mm、フランジ部の直径は150mmである。2分割フランジ型金具282の材質は鉄鋼である。支持具283の高さは200mm、2枚の支持板283bの両端間の距離は200mmである。支持具283の材質は鉄鋼である。架台285の大きさはソーラーパネル27に応じて決められる。架台285の材質は例えばステンレス鋼(SUS304)である。
【0033】
ソーラーパネル27の発電電力は必要に応じて選ばれ、特に限定されないが、例えば40Wである。この場合、40Wのソーラーパネル27の大きさは例えば532mm×620mmである。ソーラーパネル27の種類も特に限定されず、例えば単結晶シリコン型、多結晶シリコン型、CIS型、色素増感太陽電池型などのいずれであってもよい。
【0034】
夜間に杭架台28の位置が分かるようにするために、必要に応じて、架台285の外周面や支持具283の下部の外周などに反射シールを貼り付けてもよい。
【0035】
制御ボックス22、バッテリーボックス24およびソーラーパネル27の電気系統の一例を図8に示す。図8に示すように、制御ボックス22は、バッテリーボックス24から電源を供給することができるようになっているほか、AC100Vの電源を供給することができるようになっている。バッテリーボックス24には:ソーラーパネル27で発電された電気が充電されるようになっている。この場合、バッテリーボックス24の端子24a、24b間には2台のソーラーパネル27が接続されているが、これに限定されるものではなく、1台のソーラーパネル27が接続されてもよい。制御ボックス22の電源としてAC100Vを用いる場合には、バッテリーボックス24およびソーラーパネル27は設置しなくてもよい。バッテリーボックス24の電源出力用の端子24cは制御ボックス22の電源入力用の端子22aと接続されている。制御ボックス22には、AC100V用の端子22bが設けられている。制御ボックス22にはそれぞれ測域センサ14およびスピーカ15に電源を供給する端子22c、22dのほかに、予備の端子、例えば端子22e、22fも設けられている。これらの端子22e、22fは、例えば、2台目の測域センサ14、あるいはさらに3台目の測域センサ14を用いる場合にそれらと接続するために用いることができる。制御ボックス22の上部には、カラス忌避光を発生するためのライト22aが取り付けられている。
【0036】
制御ボックス22の内部系統について説明する。図9は制御ボックス22の制御系、図10は電源系を示す。図9に示すように、制御系においては、測域センサ14の出力端子が:プログラマブルロジックコントローラ(PLC)29の入力端子(有電圧接点)に接続されている。PLC29の電源端子には、直流電源、例えばDC12Vが供給されている。PLC29の無電圧接点および有電圧接点は切替スイッチ30と接続されている。切替スイッチ30は:無電圧接点または有電圧接点に切り替えることができるようになっている。切替スイッチ30が無電圧接点に切り替わるとMP3プレーヤー31に接続され、このMP3プレーヤー31により生成される音声信号がスピーカ15に送られてカラス忌避音が放鳴される。MP3プレーヤー31にはDC12Vが供給される。切替スイッチ30が有電圧接点に切り替わるとパワーリレー32に接続され、このパワーリレー32が動作して信号がライト22aに送られてこのライト22aからカラス忌避光(例えば、黄色の光)が発生する。スピーカ15からのカラス忌避音の放鳴とライト22aからのカラス忌避光の発生とは同時に行ってもよいし、個別に行ってもよい。制御系には、データロガー33が含まれる。このデータロガー33は、忌避音放鳴日時(接点監視)、カラスの検知、カラス忌避音の放鳴日時、カラス忌避音の発生回数、カラスを検知してから次にカラスを検知するまでの経過時間などのデータ、バッテリー電圧低下日時、バッテリー電圧復帰日時のデータなどをメモリに記録・保存する。メモリの容量は必要に応じて選ばれるが、例えば2GBである。夕方〜早朝の間(電源断〜復帰の稼働時間外)のデータは保存しない。例えばメモリ容量が2GBの場合には、サンプリング周期を100msとすると、約202日間分(約6カ月分)のデータを記録することができる。
【0037】
図10に示すように、制御ボックス22の電源系においては、AC/DC切替スイッチ34により、バッテリーボックス24から供給されるDC12VまたはAC/DC変換器35によりAC100VをAC/DC変換することにより得られるDC12Vを切り替えることができるようになっている。AC/DC切替スイッチ34により選択されたDC12Vは、ブレーカ36、DCタイマ37および端子台38を経由して制御系のPLC29、MP3プレーヤー31などや測域センサ14に供給されるようになっている。
【0038】
図11はバッテリーボックス24の内部系統を示す。図11に示すように、バッテリーボックス24においては、充放電コントローラ39により、ソーラーパネル27によるバッテリー40の充電またはバッテリー40からの放電が制御されるようになっている。充放電コントローラ39から供給されるDC12Vはブレーカ41を通って制御ボックス22に供給されるとともに、制御ボックス22内のデータロガー33に供給される。
【0039】
次に、上述のように構成されたカラス忌避システムの動作方法について説明する。
図1に示すように、カラス忌避システムの稼働中は、測域センサ14からのレーザビーム16が、検知エリア17において所定の周期で繰り返し面状に走査される。検知エリア17内においてレーザビーム16が何らかの物体に照射されて反射された反射光が、測域センサ14の光センサにより検出されたとする。図3には、一例として、その物体がカラス42である場合にこのカラス42にレーザビーム16が照射されている様子を示す。この最初の検出から10ミリ秒以上1.5秒以内にレーザビーム16が光センサにより再度検出されなかったとき、その物体はカラスであると判定し、測域センサ14からの検出信号が、図9に示すように、制御ボックス22のPLC29に供給される。これによって、MP3プレーヤー31が作動してスピーカ15からカラス忌避音が放鳴される。こうして放鳴されるカラス忌避音により、線路11に近寄ろうとしたカラス42は、カラス忌避音から逃れようとして線路11から立ち去る。こうして、カラス42を線路11から忌避することができる。一方、最初の検出から10ミリ秒以上1.5秒以内にレーザビーム16が光センサにより再度検出されたときは、その物体は、カラス42ではなく、線路11上を走行する列車や線路11内に何らかの理由に立ち入った人やカラス以外の動物などであると判断し、カラス忌避音を放鳴しない。
【0040】
また、カラス42の検知、カラス忌避音の放鳴日時、カラス忌避音の発生回数、カラス42を検知してから次にカラス42を検知するまでの経過時間などのデータを所定の期間にわたってデータロガー33に記録・保存する。こうして記録・保存されたデータから、カラス42の行動パターンを調べることができる。例えば、1日のうちの放鳴回数が多い時間帯や1年のうちの放鳴回数が多い期間などを把握することができる。こうして調べたカラス42の行動パターンに応じて測域センサ14を制御することにより、例えば、カラス42が線路11にほとんど飛来しない時間帯あるいは期間内には、レーザビーム16を走査する時間帯あるいは期間を限定することができる。こうすることで、測域センサ14の低消費電力化を図ることができ、ひいてはカラス忌避システムの低消費電力化を図ることができる。
【0041】
実際にこのカラス忌避システムを設置してカラスを忌避する実験を行った。ただし、測域センサ14として、北洋電機株式会社製のレーザ式測域センサ(型番UXM−30LN−P)を用いた。このレーザ式測域センサは、レーザ光源として発振波長905nmの半導体レーザを用い、測距範囲は0.1〜30m、走査角度(θ)は190°、角度分解能は0.25°、走査時間は50ms/走査、測距原理は飛行時間(Time of Flight) 方式(パルス式)である。レーザビーム16は30mで約10cmの幅に広がる。図1のL、L1 、L2 、L3 、Wについては、Lは100m、L1 は50m、L2 は25m、L3 は5m、Wは12mとした。この実験の結果、カラスの忌避効果を確認することができた。また、線路11を通過する列車、線路11に立ち入る人、カラス以外の動物の誤検知もなかった。
【0042】
以上のように、この第1の実施の形態によるカラス忌避システムによれば、線路11上に飛来するカラスのみを検知して忌避することができる。また、このカラス忌避システムは、測域センサ14、スピーカ15、制御ボックス22などの電源をソーラーパネル27によって発電した電力によってまかなうことができるため、電化柱13から供給される電源を使用しないでも稼働させることができる。また、データロガー33に記録・保存されたデータを利用することにより、カラス42の行動パターンを分析することができ、その分析結果をカラス忌避システムの稼働方法にフィードバックすることができ、それによってカラス忌避システムの低消費電力化を図ることができる。
【0043】
〈第2の実施の形態〉
第2の実施の形態によるカラス忌避システムについて説明する。このカラス忌避システムは、第1の実施の形態によるカラス忌避システムと同様に、鉄道の線路への置石などの被害を防止するために線路に近寄るカラスを忌避するためのものである。
【0044】
図12はこのカラス忌避システムを示す。図12に示すように、このカラス忌避システムにおいては、互いに隣接する2本の電化柱13にそれぞれ設置された測域センサ14から出射されるレーザビーム16の走査範囲は互いに接しており、検知エリア17内の線路11上において互いに重複していない。この場合、検知エリア17内の線路11上においてレーザビーム16により走査されない範囲が発生し、この範囲は検知の死角範囲となるが、実際上カラス42の検知に支障が生じることはない。このカラス忌避システムの上記以外のことは、第1の実施の形態によるカラス忌避システムと同様である。
【0045】
R、θ、L、L1 、L2 、L3 、Wの具体例を挙げると、Rは30m、θは190°、Lは100m、L1 は60m、L2 は20m、L3 は10m、Wは12mである。
【0046】
この第2の実施の形態によれば、第1の実施の形態と同様な利点を得ることができる。
【0047】
〈第3の実施の形態〉
第3の実施の形態によるカラス忌避システムについて説明する。このカラス忌避システムは、鉄道の駅構内の架線の被害を防止するために架線に近寄るカラスを忌避するためのものである。
【0048】
図13は駅構内の架線51、52を示す。測域センサ14は、この測域センサ14からのレーザビーム16の下端の高さが第1の実施の形態と同様にHとなる高さに設置する。レーザビーム16の走査面は水平面であってもよいし、測域センサ14から架線51、52に向かって上または下に傾斜した傾斜面であってもよい。
【0049】
このカラス忌避システムの上記以外の構成は第1の実施の形態によるカラス忌避システムと同様である。
【0050】
この第3の実施の形態によれば、駅構内の架線51、52にカラスが近寄らないようにすることができ、このカラスによる被害、例えば糞害などを防止することができる。
【0051】
〈第4の実施の形態〉
第4の実施の形態によるカラス忌避システムについて説明する。このカラス忌避システムは、駐車場に停車する自動車、バイク、自転車などの被害を防止するために駐車場に近寄るカラスを忌避するためのものである。
【0052】
図14に示すように、このカラス忌避システムにおいては、駐車場61の中または外の所定位置に電化柱13が設置されている。この電化柱13に第1の実施の形態と同様に測域センサ14およびスピーカ15が設置されている。測域センサ14は、この測域センサ14からのレーザビーム16の下端の高さが駐車場61の地面からH’の高さとなる位置に設置する。H’は2m以上6m以下とする。レーザビーム16の走査面は例えば水平面とするが、これに限定されるものではない。測域センサ14からのレーザビーム16の走査範囲は駐車場61の全範囲あるいは少なくとも主要な範囲をカバーするようにする。図示は省略するが、第1の実施の形態と同様に制御ボックス22およびバッテリーボックス24が設置されている。このカラス忌避システムの上記以外のことは、その性質に反しない限り、第1の実施の形態によるカラス忌避システムと同様である。
【0053】
この第4の実施の形態によれば、駐車場61にカラスが近寄らないようにすることができ、このカラスによる被害、例えば糞害などを防止することができる。
【0054】
〈第5の実施の形態〉
第5の実施の形態によるカラス忌避システムについて説明する。このカラス忌避システムは、ごみ収集所の被害を防止するためにごみ収集所に近寄るカラスを忌避するためのものである。
【0055】
図15に示すように、このカラス忌避システムにおいては、ごみ収集所71の中または外の所定位置に電化柱13が設置されている。この電化柱13に第1の実施の形態と同様に測域センサ14およびスピーカ15が設置されている。測域センサ14は、この測域センサ14からのレーザビーム16の下端の高さがごみ収集所71の地面からH’の高さとなる位置に設置する。H’は2m以上6m以下とする。レーザビーム16の走査面は例えば水平面とする。測域センサ14からのレーザビーム16の走査範囲はごみ収集所71の全範囲あるいは少なくとも主要な範囲をカバーするようにする。図示は省略するが、第1の実施の形態と同様に制御ボックス22およびバッテリーボックス24が設置されている。このカラス忌避システムの上記以外のことは、その性質に反しない限り、第1の実施の形態によるカラス忌避システムと同様である。
【0056】
この第5の実施の形態によれば、ごみ収集所71にカラスが近寄らないようにすることができ、このカラスによる被害、例えばごみ荒らしなどを防止することができる。
【0057】
以上、この発明の実施の形態について具体的に説明したが、この発明は、上述の実施の形態に限定されるものではなく、この発明の技術的思想に基づく各種の変形が可能である。
【0058】
例えば、上述の実施の形態において挙げた数値、構造、構成、形状、材料などはあくまでも例に過ぎず、必要に応じてこれらと異なる数値、構造、構成、形状、材料などを用いてもよい。
【符号の説明】
【0059】
11…線路、12…路盤、13…電化柱、14…測域センサ、15…スピーカ、16…レーザビーム、17…検知エリア、18…レーザチェッカー、19…取付金具、20、21…取付バンド、22…制御ボックス、23…取付バンド、24…バッテリーボックス、25…取付バンド、26a、26b…支持台、27…ソーラーパネル、28…杭架台、29…PLC、30…切替スイッチ、31…MP3プレーヤー、32…パワーリレー、33…データロガー、34…AC/DC切替スイッチ、35…AC/DC変換器、36…ブレーカ、37…DCタイマ、38…端子台、39…充放電コントローラ、40…バッテリー、41…ブレーカ、51、52…架線、61…駐車場、71…ごみ収集所
【特許請求の範囲】
【請求項1】
レーザ光源および光センサを含む測域センサと、
カラス忌避音発生装置とを有し、
上記測域センサは、上記レーザ光源からのレーザビームが、検知エリア内において面状に走査されるように構成され、
上記検知エリア内において上記レーザビームが物体に照射されて反射された光が上記光センサにより検出され、10ミリ秒以上1.5秒以内に上記レーザビームが上記光センサにより再度検出されないとき、上記カラス忌避音発生装置からカラス忌避音を発生させるように構成されていることを特徴とするカラス忌避システム。
【請求項2】
上記測域センサは鉄道の線路に沿って設置される電化柱に設置され、上記検知エリアは上記線路を含むことを特徴とする請求項1記載のカラス忌避システム。
【請求項3】
上記検知エリア内において上記レーザビームが上記物体に照射されて反射された光が上記光センサにより検出され、10ミリ秒以上1.5秒以内に上記レーザビームが上記光センサにより再度検出されたとき、上記物体は列車、人またはカラス以外の動物であると判断し、上記カラス忌避音発生装置からカラス忌避音を発生させないように構成されていることを特徴とする請求項2記載のカラス忌避システム。
【請求項4】
上記測域センサは、上記検知エリアにおける上記レーザ光源からの上記レーザビームの下端が上記線路のレール面から20cm以上60cm以下の高さに位置するように上記電化柱に設置されていることを特徴とする請求項2または3記載のカラス忌避システム。
【請求項5】
上記測域センサは、少なくとも互いに隣接する2本の上記電化柱にそれぞれ設置されていることを特徴とする請求項2〜4のいずれか一項記載のカラス忌避システム。
【請求項6】
上記測域センサは、少なくとも互いに隣接する2本の上記電化柱にそれぞれ設置され、それぞれの上記測域センサの上記レーザ光源からの上記レーザビームの走査範囲が少なくとも上記線路上において互いに重なっていることを特徴とする請求項5記載のカラス忌避システム。
【請求項7】
上記電化柱の上記測域センサより高い位置にスピーカが設置され、上記カラス忌避音発生装置により発生される音を上記スピーカから上記線路の上に流すことを特徴とする請求項2〜6のいずれか一項記載のカラス忌避システム。
【請求項8】
上記測域センサおよび上記カラス忌避音発生装置に電力を供給するためのソーラーパネルをさらに有することを特徴とする請求項1〜7のいずれか一項記載のカラス忌避システム。
【請求項9】
上記ソーラーパネルは、杭の上部に取り付けられ、水平面に対する傾斜角度が調節可能に構成された取付金具の上に設置されることを特徴とする請求項8記載のカラス忌避システム。
【請求項10】
上記杭は上記線路の路盤ののり肩および/またはのり面に打ち込まれることを特徴とする請求項9記載のカラス忌避システム。
【請求項11】
上記測域センサは、上記レーザ光源からのレーザビームが、駅構内の架線の付近を照射するように面状に走査されるように構成されていることを特徴とする請求項1記載のカラス忌避システム。
【請求項12】
カラスの検知および上記忌避音の発生の回数ならびにカラスを検知してから次にカラスを検知するまでの経過時間のデータを記録保存するように構成されていることを特徴とする請求項1〜11のいずれか一項記載のカラス忌避システム。
【請求項13】
レーザ光源および光センサを含む測域センサと、
カラス忌避音発生装置とを有し、
上記測域センサは駐車場またはごみ収集所の所定の高さに設置され、
上記測域センサは、上記レーザ光源からのレーザビームが、検知エリア内において面状に走査されるように構成され、
上記検知エリア内において上記レーザビームが物体に照射されて反射された光が上記光センサにより検出され、10ミリ秒以上1.5秒以内に上記レーザビームが上記光センサにより再度検出されないとき、上記カラス忌避音発生装置からカラス忌避音を発生させるように構成されていることを特徴とするカラス忌避システム。
【請求項14】
上記測域センサは、上記検知エリアにおける上記レーザ光源からの上記レーザビームの下端が上記駐車場または上記ごみ収集所の地面から2m以上6m以下の高さに位置するように設置されていることを特徴とする請求項13記載のカラス忌避システム。
【請求項15】
上記測域センサは、少なくとも2箇所に互いに離れて設置されていることを特徴とする請求項13または14記載のカラス忌避システム。
【請求項16】
上記少なくとも2箇所に互いに離れて設置された上記測域センサは、それぞれの上記測域センサの上記レーザ光源からの上記レーザビームの走査範囲が少なくとも上記駐車場または上記ごみ収集所において互いに重なっていることを特徴とする請求項15記載のカラス忌避システム。
【請求項17】
所定の位置にスピーカが設置され、上記カラス忌避音発生装置により発生する音を上記スピーカから上記駐車場または上記ごみ収集所の上に流すことを特徴とする請求項13〜16のいずれか一項記載のカラス忌避システム。
【請求項18】
上記測域センサおよび上記カラス忌避音発生装置に電力を供給するためのソーラーパネルをさらに有することを特徴とする請求項13〜17のいずれか一項記載のカラス忌避システム。
【請求項19】
カラスの検知および上記忌避音の発生の回数ならびにカラスを検知してから次にカラスを検知するまでの経過時間のデータを記録保存するように構成されていることを特徴とする請求項13〜18のいずれか一項記載のカラス忌避システム。
【請求項1】
レーザ光源および光センサを含む測域センサと、
カラス忌避音発生装置とを有し、
上記測域センサは、上記レーザ光源からのレーザビームが、検知エリア内において面状に走査されるように構成され、
上記検知エリア内において上記レーザビームが物体に照射されて反射された光が上記光センサにより検出され、10ミリ秒以上1.5秒以内に上記レーザビームが上記光センサにより再度検出されないとき、上記カラス忌避音発生装置からカラス忌避音を発生させるように構成されていることを特徴とするカラス忌避システム。
【請求項2】
上記測域センサは鉄道の線路に沿って設置される電化柱に設置され、上記検知エリアは上記線路を含むことを特徴とする請求項1記載のカラス忌避システム。
【請求項3】
上記検知エリア内において上記レーザビームが上記物体に照射されて反射された光が上記光センサにより検出され、10ミリ秒以上1.5秒以内に上記レーザビームが上記光センサにより再度検出されたとき、上記物体は列車、人またはカラス以外の動物であると判断し、上記カラス忌避音発生装置からカラス忌避音を発生させないように構成されていることを特徴とする請求項2記載のカラス忌避システム。
【請求項4】
上記測域センサは、上記検知エリアにおける上記レーザ光源からの上記レーザビームの下端が上記線路のレール面から20cm以上60cm以下の高さに位置するように上記電化柱に設置されていることを特徴とする請求項2または3記載のカラス忌避システム。
【請求項5】
上記測域センサは、少なくとも互いに隣接する2本の上記電化柱にそれぞれ設置されていることを特徴とする請求項2〜4のいずれか一項記載のカラス忌避システム。
【請求項6】
上記測域センサは、少なくとも互いに隣接する2本の上記電化柱にそれぞれ設置され、それぞれの上記測域センサの上記レーザ光源からの上記レーザビームの走査範囲が少なくとも上記線路上において互いに重なっていることを特徴とする請求項5記載のカラス忌避システム。
【請求項7】
上記電化柱の上記測域センサより高い位置にスピーカが設置され、上記カラス忌避音発生装置により発生される音を上記スピーカから上記線路の上に流すことを特徴とする請求項2〜6のいずれか一項記載のカラス忌避システム。
【請求項8】
上記測域センサおよび上記カラス忌避音発生装置に電力を供給するためのソーラーパネルをさらに有することを特徴とする請求項1〜7のいずれか一項記載のカラス忌避システム。
【請求項9】
上記ソーラーパネルは、杭の上部に取り付けられ、水平面に対する傾斜角度が調節可能に構成された取付金具の上に設置されることを特徴とする請求項8記載のカラス忌避システム。
【請求項10】
上記杭は上記線路の路盤ののり肩および/またはのり面に打ち込まれることを特徴とする請求項9記載のカラス忌避システム。
【請求項11】
上記測域センサは、上記レーザ光源からのレーザビームが、駅構内の架線の付近を照射するように面状に走査されるように構成されていることを特徴とする請求項1記載のカラス忌避システム。
【請求項12】
カラスの検知および上記忌避音の発生の回数ならびにカラスを検知してから次にカラスを検知するまでの経過時間のデータを記録保存するように構成されていることを特徴とする請求項1〜11のいずれか一項記載のカラス忌避システム。
【請求項13】
レーザ光源および光センサを含む測域センサと、
カラス忌避音発生装置とを有し、
上記測域センサは駐車場またはごみ収集所の所定の高さに設置され、
上記測域センサは、上記レーザ光源からのレーザビームが、検知エリア内において面状に走査されるように構成され、
上記検知エリア内において上記レーザビームが物体に照射されて反射された光が上記光センサにより検出され、10ミリ秒以上1.5秒以内に上記レーザビームが上記光センサにより再度検出されないとき、上記カラス忌避音発生装置からカラス忌避音を発生させるように構成されていることを特徴とするカラス忌避システム。
【請求項14】
上記測域センサは、上記検知エリアにおける上記レーザ光源からの上記レーザビームの下端が上記駐車場または上記ごみ収集所の地面から2m以上6m以下の高さに位置するように設置されていることを特徴とする請求項13記載のカラス忌避システム。
【請求項15】
上記測域センサは、少なくとも2箇所に互いに離れて設置されていることを特徴とする請求項13または14記載のカラス忌避システム。
【請求項16】
上記少なくとも2箇所に互いに離れて設置された上記測域センサは、それぞれの上記測域センサの上記レーザ光源からの上記レーザビームの走査範囲が少なくとも上記駐車場または上記ごみ収集所において互いに重なっていることを特徴とする請求項15記載のカラス忌避システム。
【請求項17】
所定の位置にスピーカが設置され、上記カラス忌避音発生装置により発生する音を上記スピーカから上記駐車場または上記ごみ収集所の上に流すことを特徴とする請求項13〜16のいずれか一項記載のカラス忌避システム。
【請求項18】
上記測域センサおよび上記カラス忌避音発生装置に電力を供給するためのソーラーパネルをさらに有することを特徴とする請求項13〜17のいずれか一項記載のカラス忌避システム。
【請求項19】
カラスの検知および上記忌避音の発生の回数ならびにカラスを検知してから次にカラスを検知するまでの経過時間のデータを記録保存するように構成されていることを特徴とする請求項13〜18のいずれか一項記載のカラス忌避システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−85538(P2013−85538A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−231456(P2011−231456)
【出願日】平成23年10月21日(2011.10.21)
【出願人】(000221616)東日本旅客鉄道株式会社 (833)
【出願人】(000134903)株式会社ニシヤマ (33)
【出願人】(591148602)佐鳥電機株式会社 (1)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月21日(2011.10.21)
【出願人】(000221616)東日本旅客鉄道株式会社 (833)
【出願人】(000134903)株式会社ニシヤマ (33)
【出願人】(591148602)佐鳥電機株式会社 (1)
【Fターム(参考)】
[ Back to top ]