
カラーコードターゲット、カラーコード判別装置及びカラーコード判別方法
【課題】位置マークをターゲットの中心に配置する場合に、カラーコードマークの検出及びカラーコードの判別が容易であるカラーコードターゲットを提供する。
【解決手段】本発明のカラーコードターゲットTB1は、基準位置C0を示すための基準位置マークP0からなる位置マーク部と、色彩の基準として用いる基準色マークP2からなる基準色部と、当該カラーコードターゲットTB1を識別するためのカラーコードマークP3からなるカラーコード部と、マーク間を区切る区切マークP4からなるマーク区切部とを面内に備え、基準色マークP2とカラーコードマークP3と区切マークP4が、基準位置C0を中心とする円周に沿って環状に配置され、基準位置C0に基準位置マークP0が配置され、区切マークP4は、第1の所定数の基準色マークP2を挟み、第2の所定数のカラーコードマークP3を挟むように配置される。
【解決手段】本発明のカラーコードターゲットTB1は、基準位置C0を示すための基準位置マークP0からなる位置マーク部と、色彩の基準として用いる基準色マークP2からなる基準色部と、当該カラーコードターゲットTB1を識別するためのカラーコードマークP3からなるカラーコード部と、マーク間を区切る区切マークP4からなるマーク区切部とを面内に備え、基準色マークP2とカラーコードマークP3と区切マークP4が、基準位置C0を中心とする円周に沿って環状に配置され、基準位置C0に基準位置マークP0が配置され、区切マークP4は、第1の所定数の基準色マークP2を挟み、第2の所定数のカラーコードマークP3を挟むように配置される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、カラーコードターゲット、カラーコード判別装置及びカラーコード判別方法に関する。詳しくは、自他識別可能なカラーコードマークが環状に配置されたカラーコードターゲット、かかるカラーコードターゲットのカラーコード判別装置及びカラーコード判別方法に関する。
【背景技術】
【0002】
カラーコードターゲットとは、三次元計測のために発明者達により提案されたターゲットで、面内に、計測位置を示すための位置マークと、ターゲットを識別するための色彩が施されたカラーコードマークとを備える。三次元計測に用いるターゲットを個々に識別できるようにし、これにより撮像から三次元計測までの工程の全自動化に寄与するようにしたものである(特許文献1参照)。また、カラーコードターゲットのカラーコードを判別するための装置及び方法も発明者達により提案された(特許文献2参照)。これらのカラーコードターゲット、カラーコード判別装置及びカラーコード判別方法は、ターゲットを個々に識別可能であるという特徴を活かして、様々な対象物の三次元計測に用いられてきた。特に広大な対象物、複雑な形状の対象物など、多数のターゲットを要する三次元計測において、コンピュータによる自動処理に適しており、効率の良い計測が可能となっている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−101277号公報(段落0024〜0076、図1〜図20)
【特許文献2】特開2007−101276号公報(段落0027〜0132、図1〜図30)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、これまで使用されたカラーコードターゲットは主として正方形であり、位置マークが正方形の隅に配置されていた。このため、ターゲットの中心と撮像装置の視準位置が一致しておらず、位置マークに視準位置を合わせ直す必要があり、測量の効率化に必ずしも適していなかった。ところで、地形調査その他の大規模な測量では、測量用の撮像装置をコンピュータに連結してリアルタイムにターゲットの三次元位置を算出するトータルステーションが使用されている。かかる、トータルステーションでは大量のターゲットを使用し、効率的に測量を行なうことが重要である。そこで、位置マークをターゲットの中心に配置することが考えられるが、その場合に、カラーコードマークをどのように配置し、どのように検出すべきか等が未解決であった。
【0005】
本発明は、位置マークをターゲットの中心に配置する場合に、カラーコードマークの検出及びカラーコードの判別が容易であるカラーコードターゲットを提供することを目的とする。また、かかるカラーコードターゲットのカラーコードの判別に適するカラーコード判別装置及びカラーコード判別方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明の第1の態様に係るカラーコードターゲットTB1〜TB3は、例えば図1〜図3に示すように、基準位置C0を示すための基準位置マークP0からなる位置マーク部と、色彩の基準として用いる色彩が施された基準色マークP2からなる基準色部と、当該カラーコードターゲットTB1〜TB3を識別するための色彩が施されたカラーコードマークP3からなるカラーコード部と、基準色マークP2とカラーコードマークP3の間、基準色マークP2同士の間又はカラーコードマークP3同士の間を区切る区切マークP4からなるマーク区切部とを面内に備え、基準色マークP2とカラーコードマークP3と区切マークP4が、基準位置C0を中心とする円周又は正多角形の外周に沿って環状に配置され、基準位置C0に基準位置マークP0が配置され、区切マークP4は、第1の所定数の基準色マークP2を挟み、第2の所定数のカラーコードマークP3を挟むように配置される。
【0007】
ここにおいて、カラーコードターゲットTB1〜TB3に含まれる基準色マークP2、カラーコードマークP3は単数でも複数でも良い。また、基準位置マークP0には典型的にはレトロターゲットが用いられるが、基準位置(カラーコードターゲットの中心)C0を特定できれば、テンプレートマーク等他のマークでも良い。基準色マークP2には典型的には、赤(R)、緑(G)、青(B)の光三原色が使用されるが、色相差が均等であれば他の色彩でも良い。また、カラーコードマークP3はそれぞれ色彩を有し、カラーコード部はこれを構成する単数又は複数のカラーコードマークの色彩の配置(配列を含む)の差異により識別性を有する。カラーコードマークP3の色彩には基準色マークP2の色彩を含めるのが判別を容易、確実にするので好ましいが、その他の色彩だけを用いても良い。また、カラーコードマークP3に使用する色彩の色相差を均等になるよう選択するのが使用する色彩間の差異を明確にする上で好ましい。また、各マークの円周方向の幅を同一にするとマーク検出のスキャン時間が同じになり、マークの位置を検出するのに便宜であるが、例えばマーク間の区切りを明確にできれば区切マークの幅を小さくしても良い。また、マークが環状に配置されとは、基準位置C0の周りを円周方向に一周して配置されれば、円環状に限られず多角形環状に配置されても良い。また、円周又は正多角形の外周に沿って環状に配置されたマークを連ねて構成される環をマークの環と称する。そして、基準位置マークP0はマークの環に内接して配置されても良く、カラーコードターゲットはマークの環と基準位置マークP0の間に内枠領域を有しても良く、マークの環の外側に外枠領域を有しても良い。
【0008】
本態様のように構成すると、基準位置マークP0がカラーコードターゲットCB1〜3の中心に位置するので、撮像装置の視準位置と一致した基準位置C0を効率的に求めることができる。また、基準色マークP2を用いてカラーコードマークP3の色彩の判別を正確かつ容易にできる。また、区切マークP4を用いて基準色マークP2とカラーコードマークP3を区切り、それぞれを円環等上の定位置に配置することにより基準色マークP2とカラーコードマークP3の検出が容易になる。したがって、位置マークをターゲットの中心に配置する場合に、ターゲットの基準位置C0の測定が容易であり、カラーコードマークP3の検出及びカラーコードの判別が容易であるカラーコードターゲットを提供することができる。
【0009】
また、第2の態様に係るカラーコードターゲットTB1〜TB3は、第1の態様において、例えば図1〜図3に示すように、第1の所定数は1であり、第2の所定数は2以上の定数である。
このように構成すると、区切マークP4に挟まれる基準色マーク数とカラーコードマーク数を異にすることにより、基準色マークP2とカラーコードマークP3を容易に区別できる。
【0010】
また、第3の態様に係るカラーコードターゲットTB1〜TB3は、第1又は第2の態様において、例えば図1〜図3に示すように、カラーコードマークP3のマーク数とカラーコードに用いる色彩の数とが一致し、カラーコード部を構成する各カラーコードマークP3の色彩が全て異なる。
このように構成すると、全てのコード色がカラーコードマークP3に使用されるため、基準色マークP2との比較のみで無く、各カラーコードマークP3間で色彩を相対比較することにより、各マークの色彩を確認して識別コードを決定することができ、カラーコード判別の信頼性を上げることができる。
【0011】
また、第4の態様に係るカラーコードターゲットTB1〜TB3は、第1ないし第3のいずれかの態様において、例えば図1〜図3に示すように、基準色マークP2とカラーコードマークP3は基準位置C0に対して所定の位置関係に配置される。
ここにおいて、所定の位置関係とは典型的には基準位置C0からの距離及び方向が一定の距離、一定の方向にあることをいう。本態様のように構成すると、基準色マークP2とカラーコードマークP3は円環等上の定位置に配置されるので、これらの検出が容易になる。
【0012】
また、第5の態様に係るカラーコードターゲットTB1〜TB3は、第1ないし第4のいずれかの態様において、例えば図1〜図3に示すように、区切マークP4の1つが、他の区切マークと形状、模様、色彩のいずれかが異なる。
このように構成すると、他の区切マークと異なる区切マークを用いて、円環等上のマークの検出の起点を定めることができ、カラーコードの判別を容易にできる。
【0013】
また、第6の態様に係るカラーコードターゲットTB1〜TB3は、第1ないし第5のいずれかの態様において、例えば図1〜図3に示すように、円周又は正多角形の外周に沿って環状に配置されるマークの環は単数である。
このように構成すると、計測点が比較的少ない場合に(例えば720点以下)、構成が簡素なカラーコードターゲットを使用でき、マーク検出及びコード判別の処理が簡素になり、適切である。
【0014】
また、第7の態様に係るカラーコードターゲットTB7〜8は、第1ないし第5のいずれかの態様において、例えば図12〜図13に示すように、円周又は正多角形の外周に沿って環状に配置されるマークの環は複数であり、各マークの環はいずれも基準位置C0を中心とする。
このように構成すると、計測点が比較的多い場合に(例えば720点より多い)、識別可能なコード数を乗算的に増加でき(2重環の場合、第1の環のコード数がA、第2の環のコード数がBのとき、全体のコード数はA×Bとなる、3重環の場合は全体のコード数はさらに多くなる)、適切である。
【0015】
また、第8の態様に係るカラーコードターゲットTB1〜TB3は、第6又は第7の態様において、例えば図1〜図3に示すように、1つのマークの環上に配置される基準色マークP2とカラーコードマークP3と区切マークP4は同じ形状及び寸法で統一されている。
このように構成すると、円環等上に配置される各マークの形状及び寸法が等しいので、各マークの検出が容易かつ確実になる。
【0016】
また、第9の態様に係るカラーコードターゲットTB10は、第1ないし第8のいずれかの態様の態様において、例えば図15に示すように、区切マークP4は計測位置を示すための位置マークを兼ねる。
このように構成すると、位置マークを改めて設ける必要がなく、その分、基準色マークP2やカラーコードマークP3を大きくでき、検出し易くなる。
【0017】
また、第10の態様に係る1組のカラーコードターゲットは、第1ないし第9のいずれかの態様のカラーコードターゲットTBを複数組み合わせて構成される1組のカラーコードターゲットであって、各カラーコードターゲットTBは、基準位置マークP0が基準位置C0を含む同一位置に配置され、基準色マークP2、カラーコードマークP3及び区切マークP4がマークの環上の同一位置に配置され、基準色マークP2の色彩の配置が同一であり、カラーコードマークP3の色彩の配置が全て異なるように構成される。
このように構成すると、1組のカラーコードターゲットを構成する各カラーコードターゲットTBは、カラーコードマークP3の色彩の配置のみが異なるので、同一の処理手順でカラーコードの判別が可能であり、カラーコード判別処理の自動化に適している。なお、符号TBは本発明に係るカラーコードターゲットを総称的に示す場合に使用される。
【0018】
また、第11の態様に係るカラーコード判別装置1は、例えば図4に示すように、第1の態様に係るカラーコードターゲットTB1〜TB3の画像を取得するターゲット画像取得部31と、ターゲット画像取得部31で取得されたカラーコードターゲットTB1〜TB3の画像から基準位置マークP0を検出する位置マーク検出部51と、位置マーク検出部51で検出された基準位置マークP0からカラーコードターゲットTB1〜TB3の基準位置C0を求める基準位置算定部63と、基準位置算定部63で求められた基準位置C0を中心とする円周又は正多角形の外周に沿って環状に配置されたマークを順次検出するマーク配置検出部72と、マーク配置検出部72で検出されたマークの環から基準色マークP2を順次抽出する基準色マーク抽出部73と、マーク配置検出部72で検出されたマークの環からカラーコードマーク73を順次抽出するカラーコードマーク抽出部74と、基準色マーク抽出部73で抽出された各基準色マークP2の色彩とカラーコードマーク抽出部74で抽出された各カラーコードマークP3の色彩を比較して、カラーコードマークP3の色彩の配置からカラーコードを判別するカラーコード判別部75と、基準位置算定部63で求められた基準位置C0とカラーコード判別部75で判別されたカラーコードとを対応付けて記憶するカラーコード記憶部85とを備える。
【0019】
ここにおいて、マークの環から順次抽出するとは、マークの環の指定された又は設計で定められた位置から配列順に抽出することをいう。また、色彩の比較は典型的には光三原色の検出光の強度比で比較するが、スペクトルを比較しても良い。本態様のように構成すると、位置マーク検出部51にてカラーコードターゲットTB1〜TB3の中心に位置する基準位置マークP0を直接検出するので、撮像装置の視準位置と一致した基準位置C0を効率的に求めることができる。また、基準色マーク抽出部73及びカラーコードマーク抽出部74にてそれぞれ環状に配置された基準色マークP2及びカラーコードマークP3を抽出し、カラーコード判別部75にてこれらのマークの色彩を比較してカラーコードを判別するので、カラーコードを正確かつ容易に判別することができる。したがって、本発明に係るカラーコードターゲットTBのカラーコードの判別に適したカラーコード判別装置を提供することができる。
【0020】
また、第12の態様に係るカラーコード判別装置は、第11の態様において、例えば図4に示すように、カラーコードターゲットTB1〜TB3は、他の区切マークP4と形状、模様、色彩のいずれかが異なる1つの区切マークP4を有し、1つの区切マークP4の配置に基づいてマーク配置検出部72で環状に配置されたマークを検出する起点を求める起点算定部71を備え、マーク配置検出部72は起点算定部71で求められた起点からマークを順次検出する。
このように構成すると、マーク検出の起点と順序を容易に決められ、効率的なマーク検出ができる。また、この起点はカラーコードマークの配列の起点としても使用できる。
【0021】
また、第13の態様に係るカラーコード判別方法は、例えば図5に示すように、第1の態様に係るカラーコードターゲットTB1〜TB3の画像を取得するターゲット画像取得工程(S100)と、ターゲット画像取得工程(S100)で取得されたカラーコードターゲットTB1〜TB3の画像から基準位置マークP0を検出する位置マーク検出工程(S110)と、位置マーク検出工程(S110)で検出された基準位置マークP0からカラーコードターゲットTB1〜TB3の基準位置C0を求める基準位置算定工程(S120)と、基準位置算定工程(S120)で求められた基準位置C0を中心とする円周又は正多角形の外周に沿って環状に配置されたマークを検出するマーク配置検出工程(S140)と、マーク配置検出工程(S140)で検出されたマークの環から基準色マークP2を順次抽出する基準色マーク抽出工程(S150)と、マーク配置検出工程(S140)で検出されたマークの環からカラーコードマークP3を順次抽出するカラーコードマーク抽出工程(S160)と、基準色マーク抽出工程(S150)で抽出された基準色マークP2の色彩とカラーコードマーク抽出工程(S160)で抽出されたカラーコードマークP3の色彩を比較して、カラーコードマークP3の色彩の配置からカラーコードを判別するカラーコード判別工程(S170)と、基準位置算定工程(S120)で求められた基準位置C0とカラーコード判別工程(S170)で判別されたカラーコードとを対応付けて記憶するカラーコード記憶工程(S180)とを備える。
【0022】
本態様のように構成すると、位置マーク検出工程(S110)にてカラーコードターゲットTB1〜TB3の中心に位置する基準位置マークP0を直接検出するので、撮像装置の視準位置と一致した基準位置C0を効率的に求めることができる。また、基準色マーク抽出工程(S150)及びカラーコードマーク抽出工程(S160)にて環状に配置された基準色マークP2及びカラーコードマークP3を抽出し、カラーコード判別工程(S170)にてこれらのマークの色彩を比較してカラーコードを判別するので、カラーコードを正確かつ容易に判別することができる。したがって、本発明に係るカラーコードターゲットTBのカラーコードの判別に適したカラーコード判別方法を提供することができる。
【0023】
また、第14の態様に係るカラーコード判別方法は、第13の態様において、例えば図5に示すように、カラーコードターゲットTB1〜TB3は、他の区切マークP4と形状、模様、色彩のいずれかが異なる1つの区切マークP4を有し、1つの区切マークP4の配置に基づいてマーク配置検出工程(S140)で環状に配置されたマークを検出する起点を求める起点算定工程(S130)を備え、マーク配置検出工程(S140)は起点算定工程(S130)で求められた起点からマークを順次検出する。
このように構成すると、マーク検出の起点と順序を容易に決められ、効率的なマーク検出ができる。
【発明の効果】
【0024】
本発明によれば、位置マークをターゲットの中心に配置する場合に、カラーコードマークの検出及びカラーコードの判別が容易であるカラーコードターゲットを提供できる。また、かかるカラーコードターゲットのカラーコードの判別に適するカラーコード判別装置及びカラーコード判別方法を提供できる。
【図面の簡単な説明】
【0025】
【図1】実施例1におけるカラーコードターゲットTB1の例を示す図である。
【図2】実施例1におけるカラーコードターゲットTB2の例を示す図である。
【図3】実施例1におけるカラーコードターゲットTB3の例を示す図である。
【図4】カラーコード判別装置の構成例を示す図である。
【図5】カラーコード判別方法の処理フロー例を示す図である。
【図6】レトロターゲットを用いた重心位置検出の説明図である。
【図7】カラーコードターゲットのマーク配置検出を主とした処理フロー例を示す図である。
【図8】カラーコードターゲットのマーク配置検出を説明するための図である。
【図9】実施例2におけるカラーコードターゲットTB4の例を示す図である。
【図10】実施例3におけるカラーコードターゲットTB5の例を示す図である。
【図11】実施例4におけるカラーコードターゲットTB6の例を示す図である。
【図12】実施例5におけるカラーコードターゲットTB7の例を示す図である。
【図13】実施例6におけるカラーコードターゲットTB8の例を示す図である。
【図14】実施例7におけるカラーコードターゲットTB9の例を示す図である。
【図15】実施例8におけるカラーコードターゲットTB10の例を示す図である。
【図16】実施例8におけるカラーコードターゲットTB10のコード判別の処理フロー例を示す図である。
【図17】DLT法による位置マークの確認を説明するための図である。
【図18】相互標定を説明するための図である。
【図19】実施例8における各位置マーク間の位置関係を示す図である。
【発明を実施するための形態】
【0026】
以下、図面を参照して、本発明の実施の形態について説明する。尚、各図において、互いに同一又は相当する部分には同一符号を付し,重複した説明は省略する。
【実施例1】
【0027】
[カラーコードターゲット]
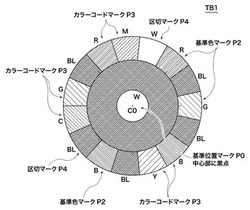
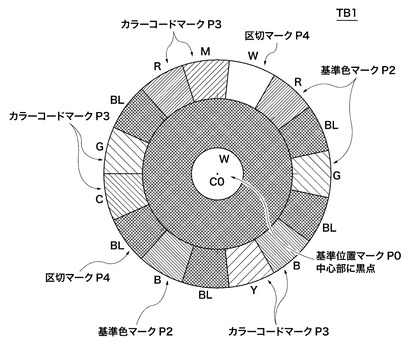
図1〜図3に実施例1におけるカラーコードターゲットTB1〜TB3の例を示す。本実施例では、形状が円形のターゲットであり、基準位置C0である中心に基準位置マークP0が配置され、基準位置C0を中心とする円周に沿って基準色マークP2、カラーコードマークP3、区切マークP4が環状に配置される例を説明する。図1〜図3は円周に沿って環状に配置されるマークの半径方向の幅が異なるが、マークの配置は同じである。環(リング)の幅は、図1が中、図2が小、図3が大である。また、基準色マークP2、カラーコードマークP3、区切マークP4が基準位置C0を中心とする円周に沿って環状(リング状)に配置されている。円周に沿って環状に配置されるマークを連ねて形成される環をマークの環(リング)(単に円環ともいう)と称する。また、マークがこのように環状に配置されているカラーコードターゲットTB1〜TB3をリングカラーターゲットと称する。基準色マークP2は色彩の基準として用いる色彩が施されたマーク、カラーコードマークP3はターゲットを識別するための色彩が施されたマーク、区切マークP4は基準色マークとカラーコードマークの間、基準色マーク同士の間又はカラーコードマーク同士の間を区切るマークである。この例では第1の所定数が1、第2の所定数が2の場合を示す。
【0028】
位置マーク部は単数又は複数の位置マークにより構成される。位置マークは計測位置を示すためのマークである。本実施例では、位置マークとして基準位置C0を示す基準位置マークP0が1つ、カラーコードターゲットTB1〜TB3の基準位置C0である円の中心に配置されている。基準位置マークP0は検出を容易にするように再帰反射機能を有する(図中Wで示す)レトロターゲットで構成され、その中心に黒点が設けられているが、黒点は省略可能である。基準位置マークP0及び円環の寸法は測量の条件に応じて様々であるが、基準位置マークP0は計測位置が充分認識できることが好ましく、例えば直径1〜100mmとする。また円環については、円周に沿って配置される各マークを充分認識できるようにマークの環の幅をとることが好ましく、例えば幅1〜100mmとする。例えば、図1の例として、基準位置マークP0の直径15mm、円環の外径60mm、内径40mm、図2の例として、基準位置マークP0の直径15mm、円環の外径50mm、内径45mm、図3の例として、基準位置マークP0の直径15mm、円環の外径60mm、内径25mmが挙げられる。なお、ここでは円環の近傍に円の中心に向かう複数の線分マーク又は十字マーク(無くても良い)が見られるが、これは中心を見付け易くするためのものである。本実施例では、基準位置マークP0をレトロターゲット(再帰反射機能を有するマーク)として説明するが、必ずしもレトロターゲットではなく、黒地に白の塗装で形成された円形の白色のマークでもよい。
【0029】
基準色部は単数又は複数の基準色マークP2により構成される。基準色マークP2は色彩の基準として用いる色彩が施されたマークであり、本実施例では、赤(図中Rで示す)、緑(図中Gで示す)、青(図中Bで示す)の3色が使用されている。また、各基準色マークP2が両側を区切マークP4で挟まれており、区切マークP4の1つであるレトロマーク(再帰反射機能を有する(図中Wで示す)マーク)を1番目として時計回りに数えて2,4,9番目に配置されている。基準色マークP2は、照明やカメラ等の撮影条件による色のズレに対応するために、相対比較時の参照用、色ズレを補正するためのカラーキャリブレーション用として使用される。さらに、基準色マークP2は、簡易な方法で作成されたカラーコードターゲットTBの色彩補正用として使用できる。例えば、色管理がなされていないカラープリンター(インクジェット・レーザー・昇華型等のプリンタ)で印刷したカラーコードターゲットTBを使用する場合は、使用プリンタ等で色彩に個体差が出るが、基準色マークP2とカラーコードマークP3の色を相対比較し補正することで、個体差の影響を抑さえることができる。このように、基準色マークP2の色彩はカラーコードマークP3の色彩の補正の他に、測定対象物2の色彩の補正にも使用できる。
【0030】
カラーコード部は単数又は複数のカラーコードマークP3により構成される。カラーコードマークP3はターゲットを識別するための色彩が施されたマークであり、本実施例では、赤(図中Rで示す)、緑(図中Gで示す)、青(図中Bで示す)、黄(図中Yで示す)、シアン(図中Cで示す)、マゼンタ(図中Mで示す)の6色が使用されている。また、それぞれ2個のカラーコードマークがその両側を区切マークP4で挟まれており、レトロマークを1番目として時計回りに数えて6,7番目、11,12番目、14,15番目に配置されている。カラーコードマーク部は、これを構成する各カラーコードマークの配色の組み合わせによってコードを表現する。コードに使用するコード色の数により表現可能なコード数が変化する。例えば、コード色数がnの場合、カラーコードターゲットTBでは、カラーコードマークP3がn個のとき、nn通りのコードを表せる。信頼度を上げるため、他の単位マークに使用されている色を重複して使用しないという条件を課した場合でも、n!通りのコードを表せる。そして、コード色数を増やせばコード数を増加できる。さらに、カラーコードマークP3の数とコード色数を等しくするという条件を課すと、全てのコード色がカラーコードマークP3に使用されるため、基準色マークP2との比較のみで無く、カラーコードマークP3間で色を相対比較することにより、各カラーコードマークP3の色彩を確認して識別コードを決定することができ、信頼性を上げることができる。さらに、各カラーコードマークP3の面積を全て同じにする条件を追加すると、カラーコードターゲットTBを画像中から検出する際にも有益である。これは、異なる識別コードをもつカラーコードターゲットTB間でも各色の占有する面積が同じになるため、カラーコードターゲットTB全体からの検出光からはほぼ同様な分散値が得られるからである。また、カラーコードマークP3間の境界は等間隔に繰り返され、明確な色彩差が検出されるので、このような検出光の繰り返しからもカラーコードターゲットTBを画像中から検出することが可能である。
【0031】
マーク区切部は複数の区切マークP4により構成される。区切マークP4は基準色マークP2とカラーコードマークP3の間、基準色マークP2同士の間又はカラーコードマークP3同士の間を区切るマークである。本実施例では、各基準色マークP2は両側を区切マークP4で挟まれており、また、それぞれ2個のカラーコードマークP3がその両側を区切マークP4で挟まれており、結果として、第1の所定数は1、第2の所定数は2になっている。
【0032】
円環上で黒色(図中BLで示す)のマークと再帰反射機能を有する(図中Wで示す)マーク(以下レトロマークという)が区切マークP4であり、この例では区切マークP4が6個である。区切マークP4を黒色とするのは挟まれる単数又は複数のマーク間の区切を明確にするためであり、白色又は再帰反射機能を有する彩色としても良い。ここで、区切マークP4の1つをレトロマークとし、他の区切マークと異なる色彩とするのは、位置マークとしての機能を持たせて基準位置C0から環までの半径を計測可能とすると共に、円環上のマーク検出の起点として用いるためである。なお、区切マークP4の1つを他の区切マークと異ならせる場合、他の区切マークと形状、模様、色彩のいずれかが異なるようにすれば良い。区切マークP4はレトロマークを1番目として時計回りに数えて1,3,5,8,10,13番目に配置されている。また、基準位置マークP0と円周に沿って環状に配置されたマークの間(内枠領域)は区切マークと同様に黒色に彩色されている。これにより、基準位置マークP0の輪郭が明瞭になる。レトロマークを1番目として時計回りに数えて1,5,8,10番目の区切マークが、基準色マークP2とカラーコードマークP3の間を区切るマークに、3番目の区切マークが基準色マークP2同士の間を区切るマークに、13番目の区切マークがカラーコードマークP3同士の間を区切るマークになっている。なお、起点はレトロマークに限られず、例えばレトロマークを1番目として時計回りに数えて任意番目のマークを起点としても良い。
【0033】
かかるカラーコードターゲットTB1〜TB3で1組のカラーコードターゲットを構成する場合、各カラーコードターゲットTB1〜TB3について、同一の形状・寸法のターゲットが用いられる。また、基準位置マークP0が基準位置C0に配置され、基準色マークP2、カラーコードマークP3及び区切マークP4が円周に沿って環状に配置されるマークの環上の同一位置に配置される。また、基準色マークP2のカラー配置は同じであり、カラーコードマークP3のカラー配置の組み合わせが全て異なるように構成される。n=6の場合には1組は720個の異なるカラーコードターゲットTBを有する。これにより、ターゲットを識別可能であるという特徴を活かして、特に広大な対象物、複雑な形状の対象物など、多数のターゲットを要する三次元計測において、コンピュータによる自動処理に適し、効率の良い計測が可能となる。
【0034】
〔カラーコード判別装置〕
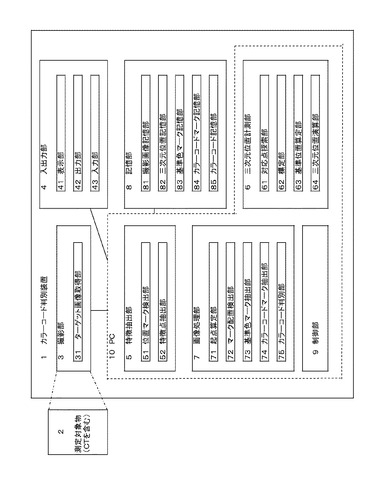
図4にカラーコード判別装置1の構成例を示す。カラーコード判別装置1は、例えば、測定対象物2を撮影する撮影部3、撮影画像や画像処理した画像を表示したり、入出力操作を行う入出力部4、撮影画像から測定対象物2の特徴点を抽出する特徴抽出部5、測定対象物2の三次元位置や形状を測定する三次元位置計測部6、撮影画像に種々の画像処理を行う画像処理部7、撮影画像、マーク、計測位置等を記憶する記憶部8、カラーコード判別装置1及びその各部を制御して、カラーコード判別装置1として機能させる制御部9により構成される。このうち、特徴抽出部5、三次元位置計測部6、画像処理部7、制御部9はパーソナルコンピュータPC10の機能を用いて実現でき、PC10内に構成される。
【0035】
撮影部3は、測定対象物2を撮影するためのステレオカメラ又は単カメラ等を有し、また、撮影画像からカラーコードターゲットTB1〜TB3の画像を取得するターゲット画像取得部31を有する。入出力部4は、画像や操作画面を表示する表示部41、プリンタやスピーカ等を有する出力部42、マウスやキーボード等を有する入力部43を有する。特徴抽出部5は、ターゲット画像取得部31で取得されたカラーコードターゲットTB1〜TB3の画像から基準位置マークP0を検出する位置マーク検出部51、撮影画像から三次元計測のための特徴点を抽出する特徴点抽出部52を有する。特徴点には、例えば測定対象物2の中心位置、コーナー位置、他と異なる特徴を有する位置、測定対象物2に貼付された又は投影されたターゲットなどが含まれる。したがって、位置マークも特徴点の1つとして扱うことができるが、ここでは、位置マーク検出部51を特定の処理を行うものとして区別した。したがって、特徴点抽出部52は、カラーコードターゲット以外のもの、例えば測定対象物2における三次元計測用の特徴点の抽出を行うものである。三次元計測部6は、ステレオペアとなる撮影画像から一方の画像(基準画像)における特徴点に対応する対応点を他方の画像(探索画像)内で探索する(カラーコードターゲットの場合は、識別されたカラーコードに基づいて同一対応点(基準位置マークP0のレトロターゲット等)を探索する)対応点探索部61、ステレオペアとなる撮影画像のカメラの位置と傾きを求める標定部62、位置マーク検出部51で検出された基準位置マークP0の基準位置C0の三次元座標を求める基準位置算定部63、対応点探索部61で対応付けされた特徴点(対応点)やカメラ位置の三次元座標を求める三次元座標演算部64を有する。位置マークも特徴点(計測点)に含めて扱うことも可能であるが、ここでは基準位置算定部63を基準位置C0の三次元座標を求めるものとして区別した。
【0036】
画像処理部7は、マークを検出する起点を求める起点算定部71、基準位置算定部63で求められた基準位置C0を中心とする円周に沿って環状に配置されたマークを順次検出するマーク配置検出部72、マーク配置検出部72で検出されたマークの環から各基準色マークP2を順次抽出する基準色マーク抽出部73、マーク配置検出部72で検出されたマークの環からカラーコードマークP3を順次抽出するカラーコードマーク抽出部74、基準色マーク抽出部73で抽出された各基準色マークP2の色彩とカラーコードマーク抽出部74で抽出された各カラーコードマークP3の色彩を比較して、カラーコードマークP3の色彩の配置からカラーコードを判別するカラーコード判別部75を有する。記憶部8は、撮影画像を記憶する撮影画像記憶部81、基準位置C0及び計測点の三次元位置座標を記憶する三次元位置記憶部82、基準色マーク抽出部73で順次抽出された各基準色マークP2の色彩データを記憶する基準色マーク記憶部83、カラーコードマーク抽出部74で順次抽出された各カラーコードマークP3の色彩データを記憶するカラーコードマーク記憶部84、基準位置算定部63で求められた基準位置C0とカラーコード判別部75で判別されたカラーコードP3とを対応付けて記憶するカラーコード記憶部85を有する。カラーコード判別部75では、色彩データと各基準色及び各カラーコード色の単色コードとの対応関係を記録する色彩−コード対応表を有し、また、使用が予定される複数種類のカラーコードターゲットTBについて、カラーコードターゲットTBの種別を示す種別コード番号を記録し、さらに、各種のカラーコードターゲットTBについて、マーク配置(色彩の配列、すなわち単色コードの配列)とターゲットのコード番号の対応関係を記録するカラーコードターゲット対応表を有し、カラーコードの判別に使用する。
【0037】
〔カラーコード判別処理フロー〕
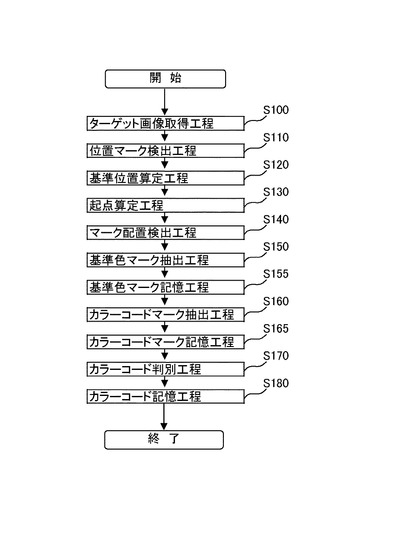
図5にカラーコードターゲットTB1〜TB3のカラーコード判別方法の処理フロー例(概要)を示す。まず、ターゲット画像取得部31にて、カラーコードターゲットTB1〜TB3の画像を取得する(ターゲット画像取得工程:S100)。次に、位置マーク検出部51にて、ターゲット画像取得工程(S100)で取得されたカラーコードターゲットTB1〜TB3の画像から基準位置マークP0を検出する(位置マーク検出工程:S110)。次に、基準位置算定部63にて、位置マーク検出工程(S110)で検出された基準位置マークP0からカラーコードターゲットTB1〜TB3の基準位置C0を求める(基準位置算定工程:S120)。次に、起点算定部71にて、再帰反射機能を有する区切マークをマーク検出の起点として求める(起点算定工程:S130)。次に、マーク配置検出部72にて、基準位置算定工程(S120)で求められた基準位置C0を中心とする円周に沿って環状に配置されたマークを起点から順次検出する(マーク配置検出工程:S140)。次に、基準色マーク抽出部73にて、マーク配置検出工程(S140)で検出されたマークの環から基準色マークP2を順次抽出し(基準色マーク抽出工程:S150)、基準色マーク記憶部83にて、順次抽出された各基準色マークP2の色彩データを記憶する(基準色マーク記憶工程:S155)。次に、カラーコードマーク抽出部74にて、マーク配置検出工程(S140)で検出されたマークの環からカラーコードマークP3を順次抽出し(カラーコードマーク抽出工程:S160)、カラーコードマーク記憶部84にて、順次抽出された各カラーコードマークP3の色彩データを記憶する(カラーコードマーク記憶工程:S165)。次に、カラーコード判別部75にて、基準色マーク抽出工程(S150)で抽出された基準色マークP2の色彩とカラーコードマーク抽出工程(S160)で順次抽出されたカラーコードマークP3の色彩を比較してカラーコードマークP3の色彩の配置からカラーコードを判別する(カラーコード判別工程:S170)。次に、カラーコード記憶部85にて、基準位置算定工程(S120)で求められた基準位置C0とカラーコード判別工程(S170)で判別されたカラーコードとを対応付けて記憶する(カラーコード記憶工程:S180)。
【0038】
以下、処理フローの詳細について説明する。位置マーク検出工程(S110)では、基準位置マークP0を探索して検出する。基準位置マークP0にはレトロターゲット又は白色のターゲットが使用されている。なお、カラーコードターゲットTBのカラーコード部P3には多数のコード色が使用され、色の分散値が大であるという特徴があるので、カラーコード部P3の分散値の大きい箇所を画像中から見出すことにより、カラーコードターゲットTBを検出できる。その後にカラーコードターゲットTBの範囲でレトロターゲットを検出しても良い。基準位置算定工程(S120)では、基準位置マークP0の中心をカラーコードターゲットTB1〜TB3の基準位置C0として求める。
【0039】
図6はレトロターゲットを用いた重心位置検出の説明図である。ただし、レトロターゲットでなく、黒地に白の塗装で形成した白色円形のターゲットでも処理は同様である。本実施例ではレトロターゲットは2つの同心円で形成されているが、外側が必ずしも円でなくとも良い。図6(A1)は同心円のうち小円の内側である内円部204の明度が明るく、小円と大円との間に形成された円環状の部分である外円部206の明度が暗いレトロターゲット200、図6(A2)は(A1)のレトロターゲット200の直径方向の明度分布図、図6(B1)は内円部204の明度が暗く、外円部206の明度が明るいレトロターゲット200、図6(B2)は(B1)のレトロターゲット200の直径方向の明度分布図を示している。レトロターゲットが図6(A1)のように内円部204の明度が明るい場合は、測定対象物2の撮影画像において重心位置での反射光量が多く明るい部分になっているため、画像の光量分布が図6(A2)のようになり、光量分布の閾値Toからレトロターゲットの内円部204や中心位置を求めることが可能となる。なお、2つの同心円の中心に中心位置を示す小円が設けられているので、明度分布図の中央に小さいディップが生じている。レトロターゲットを使用すると、反射光量が大きく検出し易いという利点がある。白色円形のターゲットでは製作が容易である。
【0040】
ターゲットの存在範囲が決定されると、例えばモーメント法によって重心位置を算出する。例えば、図6(A1)に表記されたレトロターゲット200の平面座標を(x、y)とする。そして、レトロターゲット200の明度が、しきい値To以上のx、y方向の点について、(式1)、(式2)を演算する(*は乗算演算子)。
xg={Σx*f(x、y)}/Σf(x、y) −−−−(式1)
yg={Σy*f(x、y)}/Σf(x、y) −−−−(式2)
(xg、yg):重心位置の座標、f(x、y):(x、y)座標上の濃度値
なお、(B1)に表記されたレトロターゲット200の場合は、明度がしきい値To以下のx、y方向の点について、(式1)、(式2)を演算する。これにより、レトロターゲット200の重心位置すなわち、カラーコードターゲットTBの基準位置C0が求まる。
【0041】
なお、三次元位置座標を得るには、少なくとも2方向から撮影した画像をステレオペアとして、特徴抽出部5で特徴点抽出(ここでは基準位置マークP0検出)を行い、カラーコード判別部75での判別結果を用いて、対応点探索部61で識別されたコードの対応点(基準位置マークP0の基準位置C0等)を求め、標定部62で標定によりカメラの位置と傾きを求め、三次元位置演算部64(ここでは基準位置算定部63)で三次元位置座標を求める。三次元位置座標の算出には典型的にはステレオ法が用いられる。カラーコードでない特徴点の三次元位置座標を得るには、ステレオカメラで撮影した画像を用いるか、少なくとも2方向から撮影した画像をステレオペアとして、特徴抽出部5で特徴点抽出を行い、対応点探索部61で対応点探索を行い、標定部62で標定によりカメラの位置と傾きを求め、三次元位置演算部64で三次元位置座標を求める。
【0042】
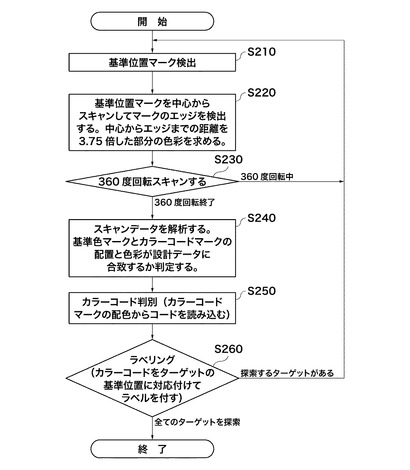
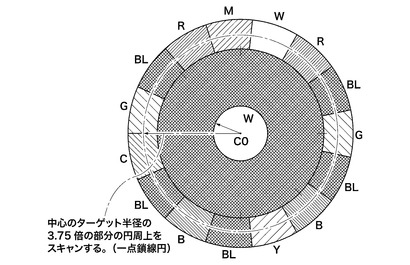
図7にカラーコードターゲットのマーク配置検出を主とした処理フロー例を示す。また、図8はカラーコードターゲットのマーク配置検出を説明するための図である。まず、カラーコードターゲットTB1〜TB3の中心の基準位置マークP0を検出する(S210)。この工程は位置マーク検出工程(S110)に該当し、次に基準位置算定工程(S120)が続く。これらの工程の詳細は図6で説明したようである。その後、カラーコードターゲットTB1〜TB3の撮影画像を、基準位置マークP0の中心(基準位置)C0から半径方向にスキャンして、基準位置マークP0の円周(エッジ)を検出して半径を求め、次に、さらにスキャンを延長して、例えば半径の3.75倍の部分の色彩(色相、彩度、明度)をチェックする(S220)。次に、360度回転スキャンして色彩(色相、彩度、明度)をチェックする(S230)。これらの工程は起点算定工程(S130)に該当する。起点算定工程(S130)では、再帰反射機能を有する(図中Wで示す)区切マーク(レトロマーク)をマーク検出の起点として求める。このため、360度回転スキャンにより光量の大きい部分を検出でき、その前後に色彩の変化を検出できれば、カラーコードターゲットTB1〜TB3の円環がスキャンされた可能性が高い。そして光量の大きい部分から、レトロマークを検出することができる。レトロマークを検出できれば、例えば、このレトロマークを円環上のマーク検出の起点として定めることができる。なお、起点はレトロマークに限られず、例えば基準位置マークP0の右に位置する、レトロマークを1番目として時計回りに数えて4番目の基準色マークを起点としても良い。また、このマーク検出の起点はカラーコードマークの配列の起点としても使用できる。
【0043】
次に、基準色マークP2とカラーコードマークP3の配置と色彩を求め、設計データに合致しているかチェックする(S240)。この工程はマーク配置検出工程(S140)からカラーコードマーク記憶工程(S165)に至る。マーク配置検出工程(S140)では、基準位置C0を中心とする円周に沿って環状に配置されたマークを順次検出する。例えば、レトロマークを起点として、円環上をスキャンし、円環上に配置された基準色マークP2、カラーコードマークP3、区切マークP4の色彩データを採集する。なおこの色彩データは360度回転スキャン(S230)して得られた色彩(色相、彩度、明度)データを用い、起点から始まるデータに変換しても良い。設計上、基準色マークP2はレトロマークを1番目として時計回りに数えて2,4,9番目に、赤、緑、青のマークが区切マークP4に挟まれて配置され、カラーコードマークP3はレトロマークを1番目として時計回りに数えて6,7,11,12,14,15番目に、6色のマークが2つずつ区切マークP4に挟まれて配置されている。また、カラーコードマークP3の色彩(6色)の配列は様々に変化する。そこで、基準色マーク抽出工程(S150)では円環上をスキャンして採集された色彩データからレトロマークを1番目として時計回りに数えて2,4,9番目の色彩データを順次抽出する。基準色マーク記憶工程(S155)では順次抽出された各基準色マークP2の色彩データを基準色マーク記憶部83に記憶する。また、カラーコードマーク抽出工程(S160)では円環上をスキャンして採集された色彩データからレトロマークを1番目として時計回りに数えて6,7,11,12,14,15番目の色彩データを順次抽出する。カラーコードマーク記憶工程(S165)では順次抽出された各カラーコードマークP3の色彩データをカラーコードマーク記憶部84に記憶する。スキャンルートは設計値に合わせて基準位置C0から座標変換(例えばアフィン変換)された基準色マークP2及びカラーコードマークP3の位置データと照合される。円環上をスキャンして採集された色彩データが上記の設計データに合致すれば、採集された色彩データはカラーコードターゲットTB1〜TB3の基準色マークP2、カラーコードマークP3、区切マークP4の色彩データであると判定できる。判定は例えばカラーコードマーク抽出工程(S160)でカラーコードの抽出後に行なう。また、基準色マークP2の基準色の色相距離を比較、チェックする。また、カラーコードマークP3の6色の色相距離を比較、チェックする。このように、求められた基準色マークP2とカラーコードマークP3が設計されたように配置され、彩色されているか否かをチェックする。これらの配色から求めるべきカラーコードターゲットTB1〜TB3(リングカラーコードターゲット)であるか否かをチェックする。
【0044】
次に、カラーコードの判別を行なう(S250)。この工程はカラーコード判別工程(S170)に該当する。カラーコードマークP3の配色からコードを読み込み、カラーコードを判別する。カラーコード判別部75は、レトロマークを1番目として時計回りに数えて6,7,11,12,14,15番目のカラーコードマークP3の色彩データ(色相、彩度、明度)を、レトロマークを1番目として時計回りに数えて2,4,9番目の基準色マークP2の色彩データ(色相、彩度、明度)と比較して、各カラーコードマークP3の色彩が赤、黄、緑、シアン、青、マゼンタのいずれであるかを判別する。このとき、カラーコードマークP3の数とコード色数を等しくするという条件を課すと、全てのコード色がカラーコードマークP3に使用されるため、基準色マークP2との比較のみで無く、カラーコードマークP3間で色を相対比較することにより、信頼性を上げることができる。なお、基準色マークP2の色彩はカラーコードマークP3の色彩の補正の他に、測定対象物2の色彩の補正にも使用できる。また、カラーコード判別部75は、色彩−コード対応表とカラーコードターゲット対応表を用いて、色彩データをカラーコードに変換する。すなわち、レトロマークを1番目として時計回りに数えて6,7,11,12,14,15番目のカラーコードマークP3の色彩データ(色相、彩度、明度)をこの配列順の色彩配列データとし、この色彩配列データをカラーコードに変換する。次に、ラベリングを行なう(S260)。この工程はカラーコード記憶工程(S180)に該当する。すなわち、判別したカラーコードをカラーコードターゲットTB1〜TB3の基準位置(中心)C0に対応付けてカラーコード記憶部85に記憶する(S260)。これにより、カラーコードターゲットTA1〜TA3の基準位置にカラーコードがラベルとして付される。まだ、探索する他のカラーコードターゲットTB1〜TB3があれば基準位置マーク検出工程(S110、S210)に戻ってこれを探索し、なければ、処理を修了する。
【0045】
以上により、本実施例によれば、位置マークをターゲットの中心に配置する場合に、カラーコードマークの検出及びカラーコードの判別が容易であるカラーコードターゲットを提供できる。また、かかるカラーコードターゲットのカラーコードの判別に適するカラーコード判別装置及びカラーコード判別方法を提供できる。
【実施例2】
【0046】
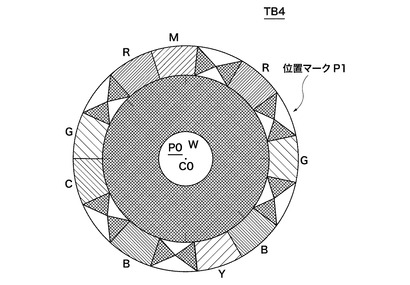
図9に実施例2におけるカラーコードターゲットTB4の例を示す。実施例2では区切マークP4がテンプレートマークである例を示す。テンプレートマークになっているため、区切マークP4の中心位置(円周方向には対称線上で半径方向には内径と外径のほぼ中間)を特定でき、位置マークとして利用することが可能である。これにより、マーク配置検出工程(S140)では6個のテンプレートマークの中心位置を結ぶ円環をスキャンすれば良い。また、テンプレートマーク間の距離からその間のマークが基準色マークP2かカラーコードマークかの区別ができる。ここでは、区切マークのレトロマークがないが、これらのテンプレートマークの配置からマーク検出の起点を定められる。また、円環の半径を効率良く検出できる。また、カラーコードターゲットTB4の傾きを容易に検出できる。
基準位置マークP0、基準色マークP2、カラーコードマークP3の配置は実施例1と同様であり、位置マークをターゲットの中心に配置する場合に、カラーコードマークの検出及びカラーコードの判別が容易であるカラーコードターゲットを提供できる。
【実施例3】
【0047】
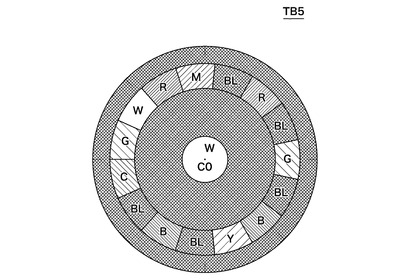
図10に実施例3におけるカラーコードターゲットTB5の例を示す。円環(リング)の外側(外枠領域)に基準位置マークP0と円環の間(内枠領域)と同様に黒色の領域を設けた例を示す。これにより、基準色マークP2、カラーコードマークP3及びレトロマークと周囲との差異が明確になる。よって、これらのマークを検出し易くなる。また、基準位置マークP0と周囲との差異も明確である。なお、実施例1とレトロマークの位置が異なる。これは、マーク検出の起点を変更するものであるが、本質的なものではない。その他、基準位置マークP0、基準色マークP2、カラーコードマークP3、区切マークP4(レトロマークの配置を除く)の配置は実施例1と同様であり、位置マークをターゲットの中心に配置する場合に、カラーコードマークの検出及びカラーコードの判別が容易であるカラーコードターゲットを提供できる。
【実施例4】
【0048】
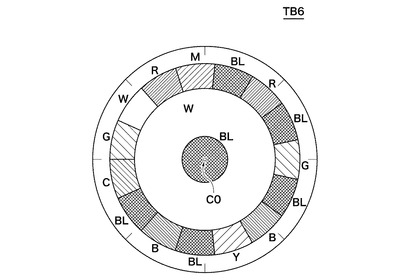
図11に実施例4におけるカラーコードターゲットTB6の例を示す。実施例3では、円環(リング)の外側の領域(外枠領域)及び基準位置マークP0と円環の間の領域(内枠領域)が黒色であったが、実施例4ではこれらの領域が白色(図中Wで示す)になっている。また、実施例3では、基準位置マークP0がレトロ機能を有していたが、実施例4では黒色(図中BLで示す)になっている。この場合でも、基準色マークP2、カラーコードマークP3及びレトロマークと周囲との差異が明確になる。よって、これらのマークを検出しやすくなる。また、基準位置マークP0と周囲との差異も明確である。その他、基準色マークP2、カラーコードマークP3、区切マークP4の配置は実施例3と同様であり、位置マークをターゲットの中心に配置する場合に、カラーコードマークの検出及びカラーコードの判別が容易であるカラーコードターゲットを提供できる。
【実施例5】
【0049】
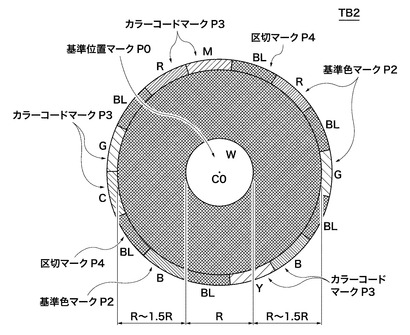
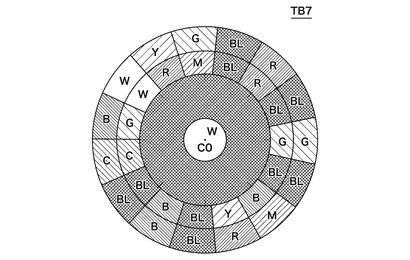
図12に実施例5におけるカラーコードターゲットTB7の例を示す。実施例1では、円環(リング)が1つであったが、実施例5では円環が2重の例を示す。内側の円環は実施例3と同様であるが、外側に別の円環が設けられている。基準色マークP2、カラーコードマークP3及び区切マークP4の円周方向の配置は内側の円環と同じであり、カラーコードマークP3の配色の順序が変更されている。円環が2重のため、カラーコードマークP3の数が倍(n=12個)になっており、識別可能なコード数が612と増大している。その他、基準位置マークP0、基準位置マークP0と円環の間の領域(内枠領域)は実施例3と同様であり、位置マークをターゲットの中心に配置する場合に、カラーコードマークの検出及びカラーコードの判別が容易であるカラーコードターゲットを提供できる。
【実施例6】
【0050】
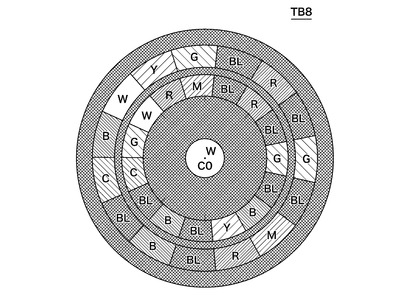
図13に実施例6におけるカラーコードターゲットTB8の例を示す。実施例5に比して、2つの円環が黒色の領域で区切られており、さらに外側の円環の外側(外枠領域)に黒色の領域が設けられている。これにより、2つの円環を明確に区別できる。よって、円環スキャンの見誤りを少なくできる。その他、基準位置マークP0、基準色マークP2、カラーコードマークP3、区切マークP4の配置は実施例5と同様であり、位置マークをターゲットの中心に配置する場合に、カラーコードマークの検出及びカラーコードの判別が容易であるカラーコードターゲットを提供できる。
【実施例7】
【0051】
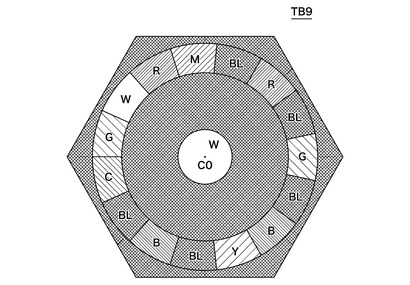
図14に実施例7におけるカラーコードターゲットTB9の例を示す。実施例3ではカラーコードターゲットの外形が円形であるが、実施例7では多角形になっている。このため、カラーコードターゲットTB9の傾きを容易に見分けられる。その他のマーク配置は実施例3と同様であり、位置マークをターゲットの中心に配置する場合に、カラーコードマークの検出及びカラーコードの判別が容易であるカラーコードターゲットを提供できる。
【実施例8】
【0052】
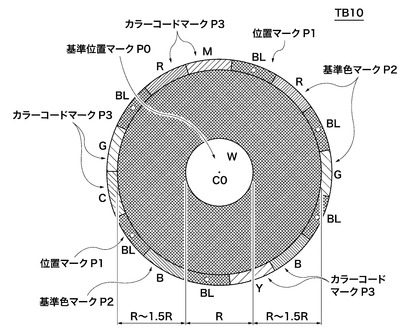
図15に実施例8におけるカラーコードターゲットTB10の例を示す。実施例8では円環に位置マークP1が設けられている例を説明する。すなわち、実施例1では円環に区切マークP4が設けられているが、図15に示すように、実施例8では区切マークが位置マークP1に置換されている。位置マークP1は計測位置を示すマークであり、黒(図中BLで示す)地のマークの中心(円周方向には対称線上で半径方向には内径と外径の中間)に小型円形の再帰反射機能を有するターゲット(レトロターゲット)が設けられている。小型円形のレトロターゲットは位置検出を可能にするため、或る程度以上の寸法とすることが好ましく、例えば外径をマークの環の半径方向の幅の半分程度とする。位置マークP1は区切マークを兼ねている。黒地とするのは、レトロターゲットとの差異を明確にして位置検出を容易にするため、また、区切マークとして、マーク間又はマーク群間の区切を明確にするためである。このように、位置マークP1を設けることにより、マーク配置検出工程(S140)では6個の位置マークP1の小型円形のレトロターゲットの中心を結ぶ円環をスキャンすれば良い。また、小型円形のレトロターゲット間の距離からその間のマークが基準色マークP2かカラーコードマークP3かの区別ができる。ここでは、区切マークとしてのレトロマークがないが、各位置マークP1(6個)の小型円形のレトロターゲットの配置からマーク検出の起点を定められる。また、円環の半径を効率良く求められ、スキャンする円環を容易に検出できる。また、カラーコードターゲットTB10の傾きを容易に検出できる。基準色マークP2、カラーコードマークP3の配置は実施例1と同様であり、位置マークをターゲットの中心に配置する場合に、カラーコードマークの検出及びカラーコードの判別が容易であるカラーコードターゲットを提供できる。
【0053】
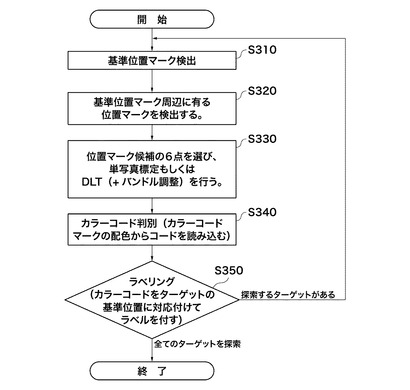
図16にカラーコードターゲットTB10の抽出の処理フロー例を示す。カラーコードターゲットTB10の基準位置C0に基準位置マークP0が設けられ、基準位置マークP0の周囲の円環に位置マークP1が設けられている。まず、カラーコードターゲットTB10の中心の基準位置マークP0を検出する(S310)。次に、基準位置マークP0の周囲の円環上の6個の位置マークP1を検出する(S320)。これらの工程は図5の位置マーク検出工程(S110)に該当する。位置マークP1にも小型円形のレトロターゲットが設けられており、小型円形のレトロターゲットの検出も基準位置マークP0の検出と同様に、図6のレトロターゲットを用いた重心位置検出を適用できる。次に、単写真標定又はDLT法を用いて又はDLT法とバンドル調整を組み合わせて、位置マークP1の中心の6点の位置を確認する(S330)。この工程は基準位置算定工程(S120)に該当する。カラーコードターゲットTBの位置マークP1の中心として検出された6点について、カラーコードターゲット(リングカラーコードターゲット)TB10の設計された位置に配置されているか否かを確認する。DLT法とバンドル調整の演算は例えば三次元位置演算部64で行ない、基準位置算定部63がその演算結果を得る。
【0054】
[DLT法計算式]
3次元DLT(Direct Linear Transformation)法とは、三角測量の原理に基づき、2台以上のカメラを用い多方面から計測したマークの位置を三次元座標に再構築する方法である。
DLT法は、写真座標と被写体の3次元座標(対象点座標)との関係を3次の射影変換式で近似したものである。
DLT法の基本式は(式3−1)となる。
【数1】

(式3−1)に対し、分母を消去すると、次の線形式を導き出せる。
【数2】
更に、(式3−2)を変形すると、以下の式となる。
【数3】
(式3−3)を直接、最小二乗法を用いて解くと、写真座標と対象点座標との関係を決定するL1〜L11の11個の未知変量を取得できる。
【0055】
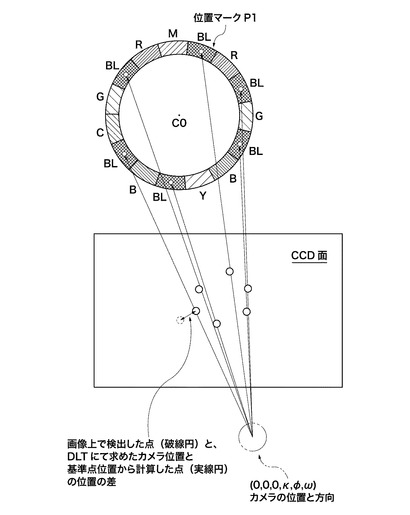
図17はDLT法による位置マークP1の確認を説明するための図である。L1〜L11の11個の未知変量が分かると、これにより、写真座標(x,y)(CCD面)と対象点座標(X,Y,Z)の関係が分かり、写真座標(x,y)と対象点座標(X,Y,Z)を結ぶ線上にあるカメラの位置と方向(0,0,0,κ,φ,ω)が求まる。これにより、位置マークP1は設計データよりあるべき位置(円環上の6点であること)が分かっているので、位置マークP1として検出された6点について求めるべきカラーコードターゲットTB10(リングカラーコードターゲット)の候補点かどうかの判定が可能となる。
【0056】
[外部標定要素の算出:相互標定]
次に、相互標定法によってカメラの位置、傾きを求める方法について説明する。標定は標定部62にて行なう。
モデル画像とは、2枚以上の立体写真から被写体が撮影されたときの状態に再現されたとき得られる立体像のことをいう。相対的に相似なモデル画像を形成することを、相互標定という。すなわち、相互標定とは、立体写真の対応する2本の光束が交会するように、左右それぞれのカメラの投影中心の位置および傾きを定めるものである。
【0057】
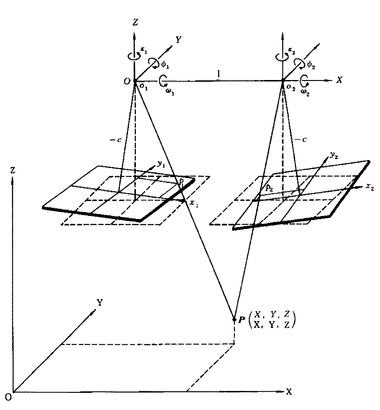
図18は相互標定を説明するための図である。次に,各モデル画像の標定計算の詳細について説明する。この計算により、左右それぞれのカメラの位置(三次元座標と三軸の傾き)が求められる。
以下の共面条件式によりこれらのカメラの位置に係るパラメータを求める。
【数4】
【0058】
モデル座標系の原点を左側の投影中心にとり、右側の投影中心を結ぶ線をX軸にとるようにする。縮尺は、基線長を単位長さにとる。このとき求めるパラメータは、左側のカメラのZ軸の回転角κ1、Y軸の回転角φ1、右側のカメラのZ軸の回転角κ2、Y軸の回転角φ2、X軸の回転角ω2の5つの回転角となる。この場合左側のカメラのX軸の回転角ω1は0なので、考慮する必要ない。
【0059】
このような条件にすると、(式4)の共面条件式は(式5)のようになり、この式を解けば各パラメータが求まる。
【数5】
【0060】
ここで、モデル座標系XYZとカメラ座標系xyzの間には、次に示すような座標変換の関係式(式8)、(式7)が成り立つ。
【数6】
【0061】
これらの式を用いて、次の手順により、未知パラメータを求める。
(a)未知パラメータの初期近似値は通常0とする。
(b)共面条件式(式5)を近似値のまわりにテーラー展開し、線形化したときの微分係数の値を(式6)、(式7)により求め、観測方程式をたてる。
(c)最小二乗法をあてはめ、近似値に対する補正量を求める。
(d)近似値を補正する。
(e)補正された近似値を用いて、(b)〜(d)までの操作を収束するまで繰り返す。
未知パラメータ(κ1,φ1,κ2,φ2,ω2)を求めることにより、カメラの位置と傾きが求まる。
【0062】
[バンドル調整]
バンドル調整は複数の撮影画像間における計測点の位置座標を適切に合わせるために行われる。投影中心、写真像および測定対象物が一直線上にあるというバンドル調整の基本式である共線条件式は次のようになる。
【数7】
バンドル調整を用いることにより、DLT法単独を用いるよりもさらに高精度の確認ができる。
【0063】
ここで、図16に戻る。次に、カラーコードの判別を行なう(S340)。この工程はカラーコード判別工程(S170)に該当する。カラーコードマークの配色からコードを読み込み、カラーコードを判別する。次に、ラベリングを行なう(S350)。この工程はカラーコード記憶工程(S180)に該当する。すなわち、判別したカラーコードをカラーコードターゲットTB10の基準位置(中心)C0に対応付けてカラーコード記憶部85に記憶する(S270)。これにより、カラーコードターゲットTB10の基準位置にカラーコードがラベルとして付される。まだ、探索する他のカラーコードターゲットTB10があれば基準位置マーク検出工程(S110,S310)に戻ってこれを探索し、なければ、処理を修了する。これにより、カラーコードターゲットTB10のカラーコードの判別に適するカラーコード判別方法を提供できる。
【0064】
図19に各位置マークP1間の位置関係を示す。基準位置マークP0の上方に位置する位置マークP10を1番目として時計回りに数えて1,3,13番目のマークの小型円形のレトロターゲットの中心を結ぶ第1の三角形T1と、基準位置マークP0の上方に位置する位置マークP10を1番目として時計回りに数えて5,8,10番目のマークの小型円形のレトロターゲットの中心を結ぶ第2の三角形T2が形成されている。第1の三角形T1と第2の三角形T2の形状は合同であり、第1の三角形T1の最長辺と第2の三角形T2の最長辺とはマークの環を上下半分に仕切る直線(水平方向の直径)に対して向かい合うように配置されている。したがって、位置マークP1の検出に際して、かかる関係の2つの三角形T1,T2を見出すことにより、検出が容易になる。なお、合同な三角形の代わりに反転対称の三角形を用いても良い。各位置マークP1は基準位置C0に対して所定の位置関係(一定の距離、一定の方向)に配置される。したがって、第1の三角形T1(頂点、辺)と第2の三角形T2(頂点、辺)との位置関係(距離と方向)も一定になる。
【0065】
そして、円環の抽出を確実に行なうために、位置マークP1の検出(S320)後に、形状が合同であり、両者の最長辺が向かい合うような関係にある2つの三角形T1,T2を形成する工程を追加しても良い。まず、カラーコードターゲットTB10の位置マークP1の候補を全てを検出する。位置マークP1の座標は中心の小型円形のレトロターゲットで検出する。この工程は位置マーク検出工程(S110)に該当する。次に、検出した位置マークの候補から三角形(第1の三角形T1及び第2の三角形T2)の候補を全て検出する。この際に、検出された位置マークの候補を結線して形成された三角形の辺の長さと2辺のなす角度から、求めるべき三角形(第1の三角形T1及び第2の三角形T2)の候補にそぐわないものは排除する。三角形の辺の長さ、2辺のなす角度から求めるべき三角形(第1の三角形T1又は第2の三角形T2)の候補と見なすことができれば、第1の三角形T1又は第2の三角形T2の候補と決定する。続いて、検出した三角形(T1,T2の候補)から、対応する三角形(形状が合同であり、互いの最長辺が向かい合うような関係にある)を検出し、カラーコードターゲット(リングカラーコードターゲット)TB10の位置マークP1の候補の6点を検出する。これらの工程は基準位置算定工程(S120)の前段に該当する。すなわち、決定した三角形(T1,T2)の候補の中から任意の1つの三角形を選択して仮の三角形T1とし、次いで、決定した三角形(T1,T2)の候補の中から任意の他の1つの三角形を選択して仮の三角形T2とし、仮の三角形T1との位置関係(仮の三角形T1からの距離と方向)から、形状が合同であり、互いの最長辺が向かい合うような関係にあるか否かをチェックする。各位置マークP1は基準位置C0に対して所定の位置関係(一定の距離、一定の方向)に配置される。したがって、第1の三角形T1(頂点、辺)と第2の三角形T2(頂点、辺)との位置関係も一定の関係(距離と方向(向き))になる。この関係から求めるべき第1の三角形T1及び第2の三角形T2と見なすことができれば、形成された第1の三角形T1及び対応する第2の三角形T2の頂点に位置する位置マークP1の中心として6点を検出する。次に、単写真標定又はDLT法を用いて又はDLT法とバンドル調整を組み合わせて、位置マークP1の中心の6点の位置を確認する(S330)。
【0066】
以上、本発明の実施の形態について説明したが、本発明は上記の実施例に限定されるものではなく、本発明の趣旨を逸脱しない範囲で実施例に種々変更を加えられることは明白である。
【0067】
例えば、以上の実施例では、マークが基準位置C0を中心とする円周に沿って環状に配置される例を説明したが、正多角形の外周に沿って環状に配置されても良い。また、基準色が3色、カラーコード色が6色の例を説明したが、基準色が1色以上、カラーコード色が2色以上であれば良く、また、基準色マーク数が1以上、カラーコードマーク数が1以上であれば良い。なお、カラーコードマーク数が1の場合は基準色マークとカラーコードマークの円周方向又は半径方向の幅を変えれば両者の区別が可能である。カラーコード色数が多いほど使用できるコード数は多くなり、少ないほど色彩の差を判別し易く、処理を簡素にできる。基準色数は、典型的には光の3原色を使用するが、カラーコード色数に応じて変更可能である。また、以上の実施例では、マークの環の数が1重又は2重の例を説明したが、3重以上でも良い。環の数が多いほど使用できるコード数は多くなり、少ないほど簡素な構成で、処理も簡素になる。また、マークの環が2重の場合には基準色マークを内側の環に配置し、カラーコードマークを外側の環に配置して区別しても良い。また、以上の実施例では基準位置マークの中心が基準位置C0であり、カラーコードターゲットの中心と一致する例を説明したが、カラーコードターゲットの中心から或る程度偏心させても良い。また、カラーコード識別装置については、例えば、入力部、出力部、起点算定部、対応点探索部、標定部等を省略し、簡素化した構成とすることも可能である。また、カラーコード識別方法については、工程の順序は変更可能であり、例えば、マークの環からの色彩データの採集は、起点の算定前に行なっても良く、マーク配置検出工程後、マーク抽出工程で改めて採集しても良い。また、以上の実施例では、円環上をスキャンして採集された色彩データが設計データに合致するか否かの判定はカラーコードマーク抽出工程で行なう例を説明したが、マーク配置検出工程で色彩データを採取して行なっても良い。また、基準色マーク抽出工程とカラーコードマーク抽出工程はどちらを先にしても良い。また、実施例8ではターゲット毎に対応する2つの三角形を抽出する例を説明したが、計測範囲の複数のカラーコードターゲットにわたり対応する2つの三角形を抽出しても良い。その他、マークの外形(4,6,8角形にする等)、区切マークが挟むマーク数、カラーコード色数、カラーコードマーク数等を適宜変更可能である。
【産業上の利用可能性】
【0068】
本発明は様々な三次元計測に用いられる。特に広大な対象物、複雑な形状の対象物など、多数のターゲットを要する三次元計測に用いられる。
【符号の説明】
【0069】
1 カラーコード判別装置
2 測定対象物
3 撮影部
4 入出力部
5 特徴抽出部
6 三次元位置計測部
7 画像処理部
8 記憶部
9 制御部
10 PC
31 ターゲット画像取得部
41 表示部
42 出力部
43 入力部
51 位置マーク検出部
52 特徴点抽出部
61 対応点探索部
62 標定部
63 基準位置算定部
64 三次元位置演算部
71 起点算定部
72 マーク配置検出部
73 基準色マーク抽出部
74 カラーコードマーク抽出部
75 カラーコード判別部
81 撮影画像記憶部
82 三次元位置記憶部
83 基準色マーク記憶部
84 カラーコードマーク記憶部
85 カラーコード記憶部
200 レトロターゲット
204 内円部
206 外円部
C0 基準位置
P0 基準位置マーク
P1,P10 位置マーク
P2 基準色マーク
P3 カラーコードマーク
P4 区切マーク
To しきい値
T1 第1の三角形
T2 第2の三角形
TB,TB1〜10 カラーコードターゲット
【技術分野】
【0001】
本発明は、カラーコードターゲット、カラーコード判別装置及びカラーコード判別方法に関する。詳しくは、自他識別可能なカラーコードマークが環状に配置されたカラーコードターゲット、かかるカラーコードターゲットのカラーコード判別装置及びカラーコード判別方法に関する。
【背景技術】
【0002】
カラーコードターゲットとは、三次元計測のために発明者達により提案されたターゲットで、面内に、計測位置を示すための位置マークと、ターゲットを識別するための色彩が施されたカラーコードマークとを備える。三次元計測に用いるターゲットを個々に識別できるようにし、これにより撮像から三次元計測までの工程の全自動化に寄与するようにしたものである(特許文献1参照)。また、カラーコードターゲットのカラーコードを判別するための装置及び方法も発明者達により提案された(特許文献2参照)。これらのカラーコードターゲット、カラーコード判別装置及びカラーコード判別方法は、ターゲットを個々に識別可能であるという特徴を活かして、様々な対象物の三次元計測に用いられてきた。特に広大な対象物、複雑な形状の対象物など、多数のターゲットを要する三次元計測において、コンピュータによる自動処理に適しており、効率の良い計測が可能となっている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−101277号公報(段落0024〜0076、図1〜図20)
【特許文献2】特開2007−101276号公報(段落0027〜0132、図1〜図30)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、これまで使用されたカラーコードターゲットは主として正方形であり、位置マークが正方形の隅に配置されていた。このため、ターゲットの中心と撮像装置の視準位置が一致しておらず、位置マークに視準位置を合わせ直す必要があり、測量の効率化に必ずしも適していなかった。ところで、地形調査その他の大規模な測量では、測量用の撮像装置をコンピュータに連結してリアルタイムにターゲットの三次元位置を算出するトータルステーションが使用されている。かかる、トータルステーションでは大量のターゲットを使用し、効率的に測量を行なうことが重要である。そこで、位置マークをターゲットの中心に配置することが考えられるが、その場合に、カラーコードマークをどのように配置し、どのように検出すべきか等が未解決であった。
【0005】
本発明は、位置マークをターゲットの中心に配置する場合に、カラーコードマークの検出及びカラーコードの判別が容易であるカラーコードターゲットを提供することを目的とする。また、かかるカラーコードターゲットのカラーコードの判別に適するカラーコード判別装置及びカラーコード判別方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明の第1の態様に係るカラーコードターゲットTB1〜TB3は、例えば図1〜図3に示すように、基準位置C0を示すための基準位置マークP0からなる位置マーク部と、色彩の基準として用いる色彩が施された基準色マークP2からなる基準色部と、当該カラーコードターゲットTB1〜TB3を識別するための色彩が施されたカラーコードマークP3からなるカラーコード部と、基準色マークP2とカラーコードマークP3の間、基準色マークP2同士の間又はカラーコードマークP3同士の間を区切る区切マークP4からなるマーク区切部とを面内に備え、基準色マークP2とカラーコードマークP3と区切マークP4が、基準位置C0を中心とする円周又は正多角形の外周に沿って環状に配置され、基準位置C0に基準位置マークP0が配置され、区切マークP4は、第1の所定数の基準色マークP2を挟み、第2の所定数のカラーコードマークP3を挟むように配置される。
【0007】
ここにおいて、カラーコードターゲットTB1〜TB3に含まれる基準色マークP2、カラーコードマークP3は単数でも複数でも良い。また、基準位置マークP0には典型的にはレトロターゲットが用いられるが、基準位置(カラーコードターゲットの中心)C0を特定できれば、テンプレートマーク等他のマークでも良い。基準色マークP2には典型的には、赤(R)、緑(G)、青(B)の光三原色が使用されるが、色相差が均等であれば他の色彩でも良い。また、カラーコードマークP3はそれぞれ色彩を有し、カラーコード部はこれを構成する単数又は複数のカラーコードマークの色彩の配置(配列を含む)の差異により識別性を有する。カラーコードマークP3の色彩には基準色マークP2の色彩を含めるのが判別を容易、確実にするので好ましいが、その他の色彩だけを用いても良い。また、カラーコードマークP3に使用する色彩の色相差を均等になるよう選択するのが使用する色彩間の差異を明確にする上で好ましい。また、各マークの円周方向の幅を同一にするとマーク検出のスキャン時間が同じになり、マークの位置を検出するのに便宜であるが、例えばマーク間の区切りを明確にできれば区切マークの幅を小さくしても良い。また、マークが環状に配置されとは、基準位置C0の周りを円周方向に一周して配置されれば、円環状に限られず多角形環状に配置されても良い。また、円周又は正多角形の外周に沿って環状に配置されたマークを連ねて構成される環をマークの環と称する。そして、基準位置マークP0はマークの環に内接して配置されても良く、カラーコードターゲットはマークの環と基準位置マークP0の間に内枠領域を有しても良く、マークの環の外側に外枠領域を有しても良い。
【0008】
本態様のように構成すると、基準位置マークP0がカラーコードターゲットCB1〜3の中心に位置するので、撮像装置の視準位置と一致した基準位置C0を効率的に求めることができる。また、基準色マークP2を用いてカラーコードマークP3の色彩の判別を正確かつ容易にできる。また、区切マークP4を用いて基準色マークP2とカラーコードマークP3を区切り、それぞれを円環等上の定位置に配置することにより基準色マークP2とカラーコードマークP3の検出が容易になる。したがって、位置マークをターゲットの中心に配置する場合に、ターゲットの基準位置C0の測定が容易であり、カラーコードマークP3の検出及びカラーコードの判別が容易であるカラーコードターゲットを提供することができる。
【0009】
また、第2の態様に係るカラーコードターゲットTB1〜TB3は、第1の態様において、例えば図1〜図3に示すように、第1の所定数は1であり、第2の所定数は2以上の定数である。
このように構成すると、区切マークP4に挟まれる基準色マーク数とカラーコードマーク数を異にすることにより、基準色マークP2とカラーコードマークP3を容易に区別できる。
【0010】
また、第3の態様に係るカラーコードターゲットTB1〜TB3は、第1又は第2の態様において、例えば図1〜図3に示すように、カラーコードマークP3のマーク数とカラーコードに用いる色彩の数とが一致し、カラーコード部を構成する各カラーコードマークP3の色彩が全て異なる。
このように構成すると、全てのコード色がカラーコードマークP3に使用されるため、基準色マークP2との比較のみで無く、各カラーコードマークP3間で色彩を相対比較することにより、各マークの色彩を確認して識別コードを決定することができ、カラーコード判別の信頼性を上げることができる。
【0011】
また、第4の態様に係るカラーコードターゲットTB1〜TB3は、第1ないし第3のいずれかの態様において、例えば図1〜図3に示すように、基準色マークP2とカラーコードマークP3は基準位置C0に対して所定の位置関係に配置される。
ここにおいて、所定の位置関係とは典型的には基準位置C0からの距離及び方向が一定の距離、一定の方向にあることをいう。本態様のように構成すると、基準色マークP2とカラーコードマークP3は円環等上の定位置に配置されるので、これらの検出が容易になる。
【0012】
また、第5の態様に係るカラーコードターゲットTB1〜TB3は、第1ないし第4のいずれかの態様において、例えば図1〜図3に示すように、区切マークP4の1つが、他の区切マークと形状、模様、色彩のいずれかが異なる。
このように構成すると、他の区切マークと異なる区切マークを用いて、円環等上のマークの検出の起点を定めることができ、カラーコードの判別を容易にできる。
【0013】
また、第6の態様に係るカラーコードターゲットTB1〜TB3は、第1ないし第5のいずれかの態様において、例えば図1〜図3に示すように、円周又は正多角形の外周に沿って環状に配置されるマークの環は単数である。
このように構成すると、計測点が比較的少ない場合に(例えば720点以下)、構成が簡素なカラーコードターゲットを使用でき、マーク検出及びコード判別の処理が簡素になり、適切である。
【0014】
また、第7の態様に係るカラーコードターゲットTB7〜8は、第1ないし第5のいずれかの態様において、例えば図12〜図13に示すように、円周又は正多角形の外周に沿って環状に配置されるマークの環は複数であり、各マークの環はいずれも基準位置C0を中心とする。
このように構成すると、計測点が比較的多い場合に(例えば720点より多い)、識別可能なコード数を乗算的に増加でき(2重環の場合、第1の環のコード数がA、第2の環のコード数がBのとき、全体のコード数はA×Bとなる、3重環の場合は全体のコード数はさらに多くなる)、適切である。
【0015】
また、第8の態様に係るカラーコードターゲットTB1〜TB3は、第6又は第7の態様において、例えば図1〜図3に示すように、1つのマークの環上に配置される基準色マークP2とカラーコードマークP3と区切マークP4は同じ形状及び寸法で統一されている。
このように構成すると、円環等上に配置される各マークの形状及び寸法が等しいので、各マークの検出が容易かつ確実になる。
【0016】
また、第9の態様に係るカラーコードターゲットTB10は、第1ないし第8のいずれかの態様の態様において、例えば図15に示すように、区切マークP4は計測位置を示すための位置マークを兼ねる。
このように構成すると、位置マークを改めて設ける必要がなく、その分、基準色マークP2やカラーコードマークP3を大きくでき、検出し易くなる。
【0017】
また、第10の態様に係る1組のカラーコードターゲットは、第1ないし第9のいずれかの態様のカラーコードターゲットTBを複数組み合わせて構成される1組のカラーコードターゲットであって、各カラーコードターゲットTBは、基準位置マークP0が基準位置C0を含む同一位置に配置され、基準色マークP2、カラーコードマークP3及び区切マークP4がマークの環上の同一位置に配置され、基準色マークP2の色彩の配置が同一であり、カラーコードマークP3の色彩の配置が全て異なるように構成される。
このように構成すると、1組のカラーコードターゲットを構成する各カラーコードターゲットTBは、カラーコードマークP3の色彩の配置のみが異なるので、同一の処理手順でカラーコードの判別が可能であり、カラーコード判別処理の自動化に適している。なお、符号TBは本発明に係るカラーコードターゲットを総称的に示す場合に使用される。
【0018】
また、第11の態様に係るカラーコード判別装置1は、例えば図4に示すように、第1の態様に係るカラーコードターゲットTB1〜TB3の画像を取得するターゲット画像取得部31と、ターゲット画像取得部31で取得されたカラーコードターゲットTB1〜TB3の画像から基準位置マークP0を検出する位置マーク検出部51と、位置マーク検出部51で検出された基準位置マークP0からカラーコードターゲットTB1〜TB3の基準位置C0を求める基準位置算定部63と、基準位置算定部63で求められた基準位置C0を中心とする円周又は正多角形の外周に沿って環状に配置されたマークを順次検出するマーク配置検出部72と、マーク配置検出部72で検出されたマークの環から基準色マークP2を順次抽出する基準色マーク抽出部73と、マーク配置検出部72で検出されたマークの環からカラーコードマーク73を順次抽出するカラーコードマーク抽出部74と、基準色マーク抽出部73で抽出された各基準色マークP2の色彩とカラーコードマーク抽出部74で抽出された各カラーコードマークP3の色彩を比較して、カラーコードマークP3の色彩の配置からカラーコードを判別するカラーコード判別部75と、基準位置算定部63で求められた基準位置C0とカラーコード判別部75で判別されたカラーコードとを対応付けて記憶するカラーコード記憶部85とを備える。
【0019】
ここにおいて、マークの環から順次抽出するとは、マークの環の指定された又は設計で定められた位置から配列順に抽出することをいう。また、色彩の比較は典型的には光三原色の検出光の強度比で比較するが、スペクトルを比較しても良い。本態様のように構成すると、位置マーク検出部51にてカラーコードターゲットTB1〜TB3の中心に位置する基準位置マークP0を直接検出するので、撮像装置の視準位置と一致した基準位置C0を効率的に求めることができる。また、基準色マーク抽出部73及びカラーコードマーク抽出部74にてそれぞれ環状に配置された基準色マークP2及びカラーコードマークP3を抽出し、カラーコード判別部75にてこれらのマークの色彩を比較してカラーコードを判別するので、カラーコードを正確かつ容易に判別することができる。したがって、本発明に係るカラーコードターゲットTBのカラーコードの判別に適したカラーコード判別装置を提供することができる。
【0020】
また、第12の態様に係るカラーコード判別装置は、第11の態様において、例えば図4に示すように、カラーコードターゲットTB1〜TB3は、他の区切マークP4と形状、模様、色彩のいずれかが異なる1つの区切マークP4を有し、1つの区切マークP4の配置に基づいてマーク配置検出部72で環状に配置されたマークを検出する起点を求める起点算定部71を備え、マーク配置検出部72は起点算定部71で求められた起点からマークを順次検出する。
このように構成すると、マーク検出の起点と順序を容易に決められ、効率的なマーク検出ができる。また、この起点はカラーコードマークの配列の起点としても使用できる。
【0021】
また、第13の態様に係るカラーコード判別方法は、例えば図5に示すように、第1の態様に係るカラーコードターゲットTB1〜TB3の画像を取得するターゲット画像取得工程(S100)と、ターゲット画像取得工程(S100)で取得されたカラーコードターゲットTB1〜TB3の画像から基準位置マークP0を検出する位置マーク検出工程(S110)と、位置マーク検出工程(S110)で検出された基準位置マークP0からカラーコードターゲットTB1〜TB3の基準位置C0を求める基準位置算定工程(S120)と、基準位置算定工程(S120)で求められた基準位置C0を中心とする円周又は正多角形の外周に沿って環状に配置されたマークを検出するマーク配置検出工程(S140)と、マーク配置検出工程(S140)で検出されたマークの環から基準色マークP2を順次抽出する基準色マーク抽出工程(S150)と、マーク配置検出工程(S140)で検出されたマークの環からカラーコードマークP3を順次抽出するカラーコードマーク抽出工程(S160)と、基準色マーク抽出工程(S150)で抽出された基準色マークP2の色彩とカラーコードマーク抽出工程(S160)で抽出されたカラーコードマークP3の色彩を比較して、カラーコードマークP3の色彩の配置からカラーコードを判別するカラーコード判別工程(S170)と、基準位置算定工程(S120)で求められた基準位置C0とカラーコード判別工程(S170)で判別されたカラーコードとを対応付けて記憶するカラーコード記憶工程(S180)とを備える。
【0022】
本態様のように構成すると、位置マーク検出工程(S110)にてカラーコードターゲットTB1〜TB3の中心に位置する基準位置マークP0を直接検出するので、撮像装置の視準位置と一致した基準位置C0を効率的に求めることができる。また、基準色マーク抽出工程(S150)及びカラーコードマーク抽出工程(S160)にて環状に配置された基準色マークP2及びカラーコードマークP3を抽出し、カラーコード判別工程(S170)にてこれらのマークの色彩を比較してカラーコードを判別するので、カラーコードを正確かつ容易に判別することができる。したがって、本発明に係るカラーコードターゲットTBのカラーコードの判別に適したカラーコード判別方法を提供することができる。
【0023】
また、第14の態様に係るカラーコード判別方法は、第13の態様において、例えば図5に示すように、カラーコードターゲットTB1〜TB3は、他の区切マークP4と形状、模様、色彩のいずれかが異なる1つの区切マークP4を有し、1つの区切マークP4の配置に基づいてマーク配置検出工程(S140)で環状に配置されたマークを検出する起点を求める起点算定工程(S130)を備え、マーク配置検出工程(S140)は起点算定工程(S130)で求められた起点からマークを順次検出する。
このように構成すると、マーク検出の起点と順序を容易に決められ、効率的なマーク検出ができる。
【発明の効果】
【0024】
本発明によれば、位置マークをターゲットの中心に配置する場合に、カラーコードマークの検出及びカラーコードの判別が容易であるカラーコードターゲットを提供できる。また、かかるカラーコードターゲットのカラーコードの判別に適するカラーコード判別装置及びカラーコード判別方法を提供できる。
【図面の簡単な説明】
【0025】
【図1】実施例1におけるカラーコードターゲットTB1の例を示す図である。
【図2】実施例1におけるカラーコードターゲットTB2の例を示す図である。
【図3】実施例1におけるカラーコードターゲットTB3の例を示す図である。
【図4】カラーコード判別装置の構成例を示す図である。
【図5】カラーコード判別方法の処理フロー例を示す図である。
【図6】レトロターゲットを用いた重心位置検出の説明図である。
【図7】カラーコードターゲットのマーク配置検出を主とした処理フロー例を示す図である。
【図8】カラーコードターゲットのマーク配置検出を説明するための図である。
【図9】実施例2におけるカラーコードターゲットTB4の例を示す図である。
【図10】実施例3におけるカラーコードターゲットTB5の例を示す図である。
【図11】実施例4におけるカラーコードターゲットTB6の例を示す図である。
【図12】実施例5におけるカラーコードターゲットTB7の例を示す図である。
【図13】実施例6におけるカラーコードターゲットTB8の例を示す図である。
【図14】実施例7におけるカラーコードターゲットTB9の例を示す図である。
【図15】実施例8におけるカラーコードターゲットTB10の例を示す図である。
【図16】実施例8におけるカラーコードターゲットTB10のコード判別の処理フロー例を示す図である。
【図17】DLT法による位置マークの確認を説明するための図である。
【図18】相互標定を説明するための図である。
【図19】実施例8における各位置マーク間の位置関係を示す図である。
【発明を実施するための形態】
【0026】
以下、図面を参照して、本発明の実施の形態について説明する。尚、各図において、互いに同一又は相当する部分には同一符号を付し,重複した説明は省略する。
【実施例1】
【0027】
[カラーコードターゲット]
図1〜図3に実施例1におけるカラーコードターゲットTB1〜TB3の例を示す。本実施例では、形状が円形のターゲットであり、基準位置C0である中心に基準位置マークP0が配置され、基準位置C0を中心とする円周に沿って基準色マークP2、カラーコードマークP3、区切マークP4が環状に配置される例を説明する。図1〜図3は円周に沿って環状に配置されるマークの半径方向の幅が異なるが、マークの配置は同じである。環(リング)の幅は、図1が中、図2が小、図3が大である。また、基準色マークP2、カラーコードマークP3、区切マークP4が基準位置C0を中心とする円周に沿って環状(リング状)に配置されている。円周に沿って環状に配置されるマークを連ねて形成される環をマークの環(リング)(単に円環ともいう)と称する。また、マークがこのように環状に配置されているカラーコードターゲットTB1〜TB3をリングカラーターゲットと称する。基準色マークP2は色彩の基準として用いる色彩が施されたマーク、カラーコードマークP3はターゲットを識別するための色彩が施されたマーク、区切マークP4は基準色マークとカラーコードマークの間、基準色マーク同士の間又はカラーコードマーク同士の間を区切るマークである。この例では第1の所定数が1、第2の所定数が2の場合を示す。
【0028】
位置マーク部は単数又は複数の位置マークにより構成される。位置マークは計測位置を示すためのマークである。本実施例では、位置マークとして基準位置C0を示す基準位置マークP0が1つ、カラーコードターゲットTB1〜TB3の基準位置C0である円の中心に配置されている。基準位置マークP0は検出を容易にするように再帰反射機能を有する(図中Wで示す)レトロターゲットで構成され、その中心に黒点が設けられているが、黒点は省略可能である。基準位置マークP0及び円環の寸法は測量の条件に応じて様々であるが、基準位置マークP0は計測位置が充分認識できることが好ましく、例えば直径1〜100mmとする。また円環については、円周に沿って配置される各マークを充分認識できるようにマークの環の幅をとることが好ましく、例えば幅1〜100mmとする。例えば、図1の例として、基準位置マークP0の直径15mm、円環の外径60mm、内径40mm、図2の例として、基準位置マークP0の直径15mm、円環の外径50mm、内径45mm、図3の例として、基準位置マークP0の直径15mm、円環の外径60mm、内径25mmが挙げられる。なお、ここでは円環の近傍に円の中心に向かう複数の線分マーク又は十字マーク(無くても良い)が見られるが、これは中心を見付け易くするためのものである。本実施例では、基準位置マークP0をレトロターゲット(再帰反射機能を有するマーク)として説明するが、必ずしもレトロターゲットではなく、黒地に白の塗装で形成された円形の白色のマークでもよい。
【0029】
基準色部は単数又は複数の基準色マークP2により構成される。基準色マークP2は色彩の基準として用いる色彩が施されたマークであり、本実施例では、赤(図中Rで示す)、緑(図中Gで示す)、青(図中Bで示す)の3色が使用されている。また、各基準色マークP2が両側を区切マークP4で挟まれており、区切マークP4の1つであるレトロマーク(再帰反射機能を有する(図中Wで示す)マーク)を1番目として時計回りに数えて2,4,9番目に配置されている。基準色マークP2は、照明やカメラ等の撮影条件による色のズレに対応するために、相対比較時の参照用、色ズレを補正するためのカラーキャリブレーション用として使用される。さらに、基準色マークP2は、簡易な方法で作成されたカラーコードターゲットTBの色彩補正用として使用できる。例えば、色管理がなされていないカラープリンター(インクジェット・レーザー・昇華型等のプリンタ)で印刷したカラーコードターゲットTBを使用する場合は、使用プリンタ等で色彩に個体差が出るが、基準色マークP2とカラーコードマークP3の色を相対比較し補正することで、個体差の影響を抑さえることができる。このように、基準色マークP2の色彩はカラーコードマークP3の色彩の補正の他に、測定対象物2の色彩の補正にも使用できる。
【0030】
カラーコード部は単数又は複数のカラーコードマークP3により構成される。カラーコードマークP3はターゲットを識別するための色彩が施されたマークであり、本実施例では、赤(図中Rで示す)、緑(図中Gで示す)、青(図中Bで示す)、黄(図中Yで示す)、シアン(図中Cで示す)、マゼンタ(図中Mで示す)の6色が使用されている。また、それぞれ2個のカラーコードマークがその両側を区切マークP4で挟まれており、レトロマークを1番目として時計回りに数えて6,7番目、11,12番目、14,15番目に配置されている。カラーコードマーク部は、これを構成する各カラーコードマークの配色の組み合わせによってコードを表現する。コードに使用するコード色の数により表現可能なコード数が変化する。例えば、コード色数がnの場合、カラーコードターゲットTBでは、カラーコードマークP3がn個のとき、nn通りのコードを表せる。信頼度を上げるため、他の単位マークに使用されている色を重複して使用しないという条件を課した場合でも、n!通りのコードを表せる。そして、コード色数を増やせばコード数を増加できる。さらに、カラーコードマークP3の数とコード色数を等しくするという条件を課すと、全てのコード色がカラーコードマークP3に使用されるため、基準色マークP2との比較のみで無く、カラーコードマークP3間で色を相対比較することにより、各カラーコードマークP3の色彩を確認して識別コードを決定することができ、信頼性を上げることができる。さらに、各カラーコードマークP3の面積を全て同じにする条件を追加すると、カラーコードターゲットTBを画像中から検出する際にも有益である。これは、異なる識別コードをもつカラーコードターゲットTB間でも各色の占有する面積が同じになるため、カラーコードターゲットTB全体からの検出光からはほぼ同様な分散値が得られるからである。また、カラーコードマークP3間の境界は等間隔に繰り返され、明確な色彩差が検出されるので、このような検出光の繰り返しからもカラーコードターゲットTBを画像中から検出することが可能である。
【0031】
マーク区切部は複数の区切マークP4により構成される。区切マークP4は基準色マークP2とカラーコードマークP3の間、基準色マークP2同士の間又はカラーコードマークP3同士の間を区切るマークである。本実施例では、各基準色マークP2は両側を区切マークP4で挟まれており、また、それぞれ2個のカラーコードマークP3がその両側を区切マークP4で挟まれており、結果として、第1の所定数は1、第2の所定数は2になっている。
【0032】
円環上で黒色(図中BLで示す)のマークと再帰反射機能を有する(図中Wで示す)マーク(以下レトロマークという)が区切マークP4であり、この例では区切マークP4が6個である。区切マークP4を黒色とするのは挟まれる単数又は複数のマーク間の区切を明確にするためであり、白色又は再帰反射機能を有する彩色としても良い。ここで、区切マークP4の1つをレトロマークとし、他の区切マークと異なる色彩とするのは、位置マークとしての機能を持たせて基準位置C0から環までの半径を計測可能とすると共に、円環上のマーク検出の起点として用いるためである。なお、区切マークP4の1つを他の区切マークと異ならせる場合、他の区切マークと形状、模様、色彩のいずれかが異なるようにすれば良い。区切マークP4はレトロマークを1番目として時計回りに数えて1,3,5,8,10,13番目に配置されている。また、基準位置マークP0と円周に沿って環状に配置されたマークの間(内枠領域)は区切マークと同様に黒色に彩色されている。これにより、基準位置マークP0の輪郭が明瞭になる。レトロマークを1番目として時計回りに数えて1,5,8,10番目の区切マークが、基準色マークP2とカラーコードマークP3の間を区切るマークに、3番目の区切マークが基準色マークP2同士の間を区切るマークに、13番目の区切マークがカラーコードマークP3同士の間を区切るマークになっている。なお、起点はレトロマークに限られず、例えばレトロマークを1番目として時計回りに数えて任意番目のマークを起点としても良い。
【0033】
かかるカラーコードターゲットTB1〜TB3で1組のカラーコードターゲットを構成する場合、各カラーコードターゲットTB1〜TB3について、同一の形状・寸法のターゲットが用いられる。また、基準位置マークP0が基準位置C0に配置され、基準色マークP2、カラーコードマークP3及び区切マークP4が円周に沿って環状に配置されるマークの環上の同一位置に配置される。また、基準色マークP2のカラー配置は同じであり、カラーコードマークP3のカラー配置の組み合わせが全て異なるように構成される。n=6の場合には1組は720個の異なるカラーコードターゲットTBを有する。これにより、ターゲットを識別可能であるという特徴を活かして、特に広大な対象物、複雑な形状の対象物など、多数のターゲットを要する三次元計測において、コンピュータによる自動処理に適し、効率の良い計測が可能となる。
【0034】
〔カラーコード判別装置〕
図4にカラーコード判別装置1の構成例を示す。カラーコード判別装置1は、例えば、測定対象物2を撮影する撮影部3、撮影画像や画像処理した画像を表示したり、入出力操作を行う入出力部4、撮影画像から測定対象物2の特徴点を抽出する特徴抽出部5、測定対象物2の三次元位置や形状を測定する三次元位置計測部6、撮影画像に種々の画像処理を行う画像処理部7、撮影画像、マーク、計測位置等を記憶する記憶部8、カラーコード判別装置1及びその各部を制御して、カラーコード判別装置1として機能させる制御部9により構成される。このうち、特徴抽出部5、三次元位置計測部6、画像処理部7、制御部9はパーソナルコンピュータPC10の機能を用いて実現でき、PC10内に構成される。
【0035】
撮影部3は、測定対象物2を撮影するためのステレオカメラ又は単カメラ等を有し、また、撮影画像からカラーコードターゲットTB1〜TB3の画像を取得するターゲット画像取得部31を有する。入出力部4は、画像や操作画面を表示する表示部41、プリンタやスピーカ等を有する出力部42、マウスやキーボード等を有する入力部43を有する。特徴抽出部5は、ターゲット画像取得部31で取得されたカラーコードターゲットTB1〜TB3の画像から基準位置マークP0を検出する位置マーク検出部51、撮影画像から三次元計測のための特徴点を抽出する特徴点抽出部52を有する。特徴点には、例えば測定対象物2の中心位置、コーナー位置、他と異なる特徴を有する位置、測定対象物2に貼付された又は投影されたターゲットなどが含まれる。したがって、位置マークも特徴点の1つとして扱うことができるが、ここでは、位置マーク検出部51を特定の処理を行うものとして区別した。したがって、特徴点抽出部52は、カラーコードターゲット以外のもの、例えば測定対象物2における三次元計測用の特徴点の抽出を行うものである。三次元計測部6は、ステレオペアとなる撮影画像から一方の画像(基準画像)における特徴点に対応する対応点を他方の画像(探索画像)内で探索する(カラーコードターゲットの場合は、識別されたカラーコードに基づいて同一対応点(基準位置マークP0のレトロターゲット等)を探索する)対応点探索部61、ステレオペアとなる撮影画像のカメラの位置と傾きを求める標定部62、位置マーク検出部51で検出された基準位置マークP0の基準位置C0の三次元座標を求める基準位置算定部63、対応点探索部61で対応付けされた特徴点(対応点)やカメラ位置の三次元座標を求める三次元座標演算部64を有する。位置マークも特徴点(計測点)に含めて扱うことも可能であるが、ここでは基準位置算定部63を基準位置C0の三次元座標を求めるものとして区別した。
【0036】
画像処理部7は、マークを検出する起点を求める起点算定部71、基準位置算定部63で求められた基準位置C0を中心とする円周に沿って環状に配置されたマークを順次検出するマーク配置検出部72、マーク配置検出部72で検出されたマークの環から各基準色マークP2を順次抽出する基準色マーク抽出部73、マーク配置検出部72で検出されたマークの環からカラーコードマークP3を順次抽出するカラーコードマーク抽出部74、基準色マーク抽出部73で抽出された各基準色マークP2の色彩とカラーコードマーク抽出部74で抽出された各カラーコードマークP3の色彩を比較して、カラーコードマークP3の色彩の配置からカラーコードを判別するカラーコード判別部75を有する。記憶部8は、撮影画像を記憶する撮影画像記憶部81、基準位置C0及び計測点の三次元位置座標を記憶する三次元位置記憶部82、基準色マーク抽出部73で順次抽出された各基準色マークP2の色彩データを記憶する基準色マーク記憶部83、カラーコードマーク抽出部74で順次抽出された各カラーコードマークP3の色彩データを記憶するカラーコードマーク記憶部84、基準位置算定部63で求められた基準位置C0とカラーコード判別部75で判別されたカラーコードP3とを対応付けて記憶するカラーコード記憶部85を有する。カラーコード判別部75では、色彩データと各基準色及び各カラーコード色の単色コードとの対応関係を記録する色彩−コード対応表を有し、また、使用が予定される複数種類のカラーコードターゲットTBについて、カラーコードターゲットTBの種別を示す種別コード番号を記録し、さらに、各種のカラーコードターゲットTBについて、マーク配置(色彩の配列、すなわち単色コードの配列)とターゲットのコード番号の対応関係を記録するカラーコードターゲット対応表を有し、カラーコードの判別に使用する。
【0037】
〔カラーコード判別処理フロー〕
図5にカラーコードターゲットTB1〜TB3のカラーコード判別方法の処理フロー例(概要)を示す。まず、ターゲット画像取得部31にて、カラーコードターゲットTB1〜TB3の画像を取得する(ターゲット画像取得工程:S100)。次に、位置マーク検出部51にて、ターゲット画像取得工程(S100)で取得されたカラーコードターゲットTB1〜TB3の画像から基準位置マークP0を検出する(位置マーク検出工程:S110)。次に、基準位置算定部63にて、位置マーク検出工程(S110)で検出された基準位置マークP0からカラーコードターゲットTB1〜TB3の基準位置C0を求める(基準位置算定工程:S120)。次に、起点算定部71にて、再帰反射機能を有する区切マークをマーク検出の起点として求める(起点算定工程:S130)。次に、マーク配置検出部72にて、基準位置算定工程(S120)で求められた基準位置C0を中心とする円周に沿って環状に配置されたマークを起点から順次検出する(マーク配置検出工程:S140)。次に、基準色マーク抽出部73にて、マーク配置検出工程(S140)で検出されたマークの環から基準色マークP2を順次抽出し(基準色マーク抽出工程:S150)、基準色マーク記憶部83にて、順次抽出された各基準色マークP2の色彩データを記憶する(基準色マーク記憶工程:S155)。次に、カラーコードマーク抽出部74にて、マーク配置検出工程(S140)で検出されたマークの環からカラーコードマークP3を順次抽出し(カラーコードマーク抽出工程:S160)、カラーコードマーク記憶部84にて、順次抽出された各カラーコードマークP3の色彩データを記憶する(カラーコードマーク記憶工程:S165)。次に、カラーコード判別部75にて、基準色マーク抽出工程(S150)で抽出された基準色マークP2の色彩とカラーコードマーク抽出工程(S160)で順次抽出されたカラーコードマークP3の色彩を比較してカラーコードマークP3の色彩の配置からカラーコードを判別する(カラーコード判別工程:S170)。次に、カラーコード記憶部85にて、基準位置算定工程(S120)で求められた基準位置C0とカラーコード判別工程(S170)で判別されたカラーコードとを対応付けて記憶する(カラーコード記憶工程:S180)。
【0038】
以下、処理フローの詳細について説明する。位置マーク検出工程(S110)では、基準位置マークP0を探索して検出する。基準位置マークP0にはレトロターゲット又は白色のターゲットが使用されている。なお、カラーコードターゲットTBのカラーコード部P3には多数のコード色が使用され、色の分散値が大であるという特徴があるので、カラーコード部P3の分散値の大きい箇所を画像中から見出すことにより、カラーコードターゲットTBを検出できる。その後にカラーコードターゲットTBの範囲でレトロターゲットを検出しても良い。基準位置算定工程(S120)では、基準位置マークP0の中心をカラーコードターゲットTB1〜TB3の基準位置C0として求める。
【0039】
図6はレトロターゲットを用いた重心位置検出の説明図である。ただし、レトロターゲットでなく、黒地に白の塗装で形成した白色円形のターゲットでも処理は同様である。本実施例ではレトロターゲットは2つの同心円で形成されているが、外側が必ずしも円でなくとも良い。図6(A1)は同心円のうち小円の内側である内円部204の明度が明るく、小円と大円との間に形成された円環状の部分である外円部206の明度が暗いレトロターゲット200、図6(A2)は(A1)のレトロターゲット200の直径方向の明度分布図、図6(B1)は内円部204の明度が暗く、外円部206の明度が明るいレトロターゲット200、図6(B2)は(B1)のレトロターゲット200の直径方向の明度分布図を示している。レトロターゲットが図6(A1)のように内円部204の明度が明るい場合は、測定対象物2の撮影画像において重心位置での反射光量が多く明るい部分になっているため、画像の光量分布が図6(A2)のようになり、光量分布の閾値Toからレトロターゲットの内円部204や中心位置を求めることが可能となる。なお、2つの同心円の中心に中心位置を示す小円が設けられているので、明度分布図の中央に小さいディップが生じている。レトロターゲットを使用すると、反射光量が大きく検出し易いという利点がある。白色円形のターゲットでは製作が容易である。
【0040】
ターゲットの存在範囲が決定されると、例えばモーメント法によって重心位置を算出する。例えば、図6(A1)に表記されたレトロターゲット200の平面座標を(x、y)とする。そして、レトロターゲット200の明度が、しきい値To以上のx、y方向の点について、(式1)、(式2)を演算する(*は乗算演算子)。
xg={Σx*f(x、y)}/Σf(x、y) −−−−(式1)
yg={Σy*f(x、y)}/Σf(x、y) −−−−(式2)
(xg、yg):重心位置の座標、f(x、y):(x、y)座標上の濃度値
なお、(B1)に表記されたレトロターゲット200の場合は、明度がしきい値To以下のx、y方向の点について、(式1)、(式2)を演算する。これにより、レトロターゲット200の重心位置すなわち、カラーコードターゲットTBの基準位置C0が求まる。
【0041】
なお、三次元位置座標を得るには、少なくとも2方向から撮影した画像をステレオペアとして、特徴抽出部5で特徴点抽出(ここでは基準位置マークP0検出)を行い、カラーコード判別部75での判別結果を用いて、対応点探索部61で識別されたコードの対応点(基準位置マークP0の基準位置C0等)を求め、標定部62で標定によりカメラの位置と傾きを求め、三次元位置演算部64(ここでは基準位置算定部63)で三次元位置座標を求める。三次元位置座標の算出には典型的にはステレオ法が用いられる。カラーコードでない特徴点の三次元位置座標を得るには、ステレオカメラで撮影した画像を用いるか、少なくとも2方向から撮影した画像をステレオペアとして、特徴抽出部5で特徴点抽出を行い、対応点探索部61で対応点探索を行い、標定部62で標定によりカメラの位置と傾きを求め、三次元位置演算部64で三次元位置座標を求める。
【0042】
図7にカラーコードターゲットのマーク配置検出を主とした処理フロー例を示す。また、図8はカラーコードターゲットのマーク配置検出を説明するための図である。まず、カラーコードターゲットTB1〜TB3の中心の基準位置マークP0を検出する(S210)。この工程は位置マーク検出工程(S110)に該当し、次に基準位置算定工程(S120)が続く。これらの工程の詳細は図6で説明したようである。その後、カラーコードターゲットTB1〜TB3の撮影画像を、基準位置マークP0の中心(基準位置)C0から半径方向にスキャンして、基準位置マークP0の円周(エッジ)を検出して半径を求め、次に、さらにスキャンを延長して、例えば半径の3.75倍の部分の色彩(色相、彩度、明度)をチェックする(S220)。次に、360度回転スキャンして色彩(色相、彩度、明度)をチェックする(S230)。これらの工程は起点算定工程(S130)に該当する。起点算定工程(S130)では、再帰反射機能を有する(図中Wで示す)区切マーク(レトロマーク)をマーク検出の起点として求める。このため、360度回転スキャンにより光量の大きい部分を検出でき、その前後に色彩の変化を検出できれば、カラーコードターゲットTB1〜TB3の円環がスキャンされた可能性が高い。そして光量の大きい部分から、レトロマークを検出することができる。レトロマークを検出できれば、例えば、このレトロマークを円環上のマーク検出の起点として定めることができる。なお、起点はレトロマークに限られず、例えば基準位置マークP0の右に位置する、レトロマークを1番目として時計回りに数えて4番目の基準色マークを起点としても良い。また、このマーク検出の起点はカラーコードマークの配列の起点としても使用できる。
【0043】
次に、基準色マークP2とカラーコードマークP3の配置と色彩を求め、設計データに合致しているかチェックする(S240)。この工程はマーク配置検出工程(S140)からカラーコードマーク記憶工程(S165)に至る。マーク配置検出工程(S140)では、基準位置C0を中心とする円周に沿って環状に配置されたマークを順次検出する。例えば、レトロマークを起点として、円環上をスキャンし、円環上に配置された基準色マークP2、カラーコードマークP3、区切マークP4の色彩データを採集する。なおこの色彩データは360度回転スキャン(S230)して得られた色彩(色相、彩度、明度)データを用い、起点から始まるデータに変換しても良い。設計上、基準色マークP2はレトロマークを1番目として時計回りに数えて2,4,9番目に、赤、緑、青のマークが区切マークP4に挟まれて配置され、カラーコードマークP3はレトロマークを1番目として時計回りに数えて6,7,11,12,14,15番目に、6色のマークが2つずつ区切マークP4に挟まれて配置されている。また、カラーコードマークP3の色彩(6色)の配列は様々に変化する。そこで、基準色マーク抽出工程(S150)では円環上をスキャンして採集された色彩データからレトロマークを1番目として時計回りに数えて2,4,9番目の色彩データを順次抽出する。基準色マーク記憶工程(S155)では順次抽出された各基準色マークP2の色彩データを基準色マーク記憶部83に記憶する。また、カラーコードマーク抽出工程(S160)では円環上をスキャンして採集された色彩データからレトロマークを1番目として時計回りに数えて6,7,11,12,14,15番目の色彩データを順次抽出する。カラーコードマーク記憶工程(S165)では順次抽出された各カラーコードマークP3の色彩データをカラーコードマーク記憶部84に記憶する。スキャンルートは設計値に合わせて基準位置C0から座標変換(例えばアフィン変換)された基準色マークP2及びカラーコードマークP3の位置データと照合される。円環上をスキャンして採集された色彩データが上記の設計データに合致すれば、採集された色彩データはカラーコードターゲットTB1〜TB3の基準色マークP2、カラーコードマークP3、区切マークP4の色彩データであると判定できる。判定は例えばカラーコードマーク抽出工程(S160)でカラーコードの抽出後に行なう。また、基準色マークP2の基準色の色相距離を比較、チェックする。また、カラーコードマークP3の6色の色相距離を比較、チェックする。このように、求められた基準色マークP2とカラーコードマークP3が設計されたように配置され、彩色されているか否かをチェックする。これらの配色から求めるべきカラーコードターゲットTB1〜TB3(リングカラーコードターゲット)であるか否かをチェックする。
【0044】
次に、カラーコードの判別を行なう(S250)。この工程はカラーコード判別工程(S170)に該当する。カラーコードマークP3の配色からコードを読み込み、カラーコードを判別する。カラーコード判別部75は、レトロマークを1番目として時計回りに数えて6,7,11,12,14,15番目のカラーコードマークP3の色彩データ(色相、彩度、明度)を、レトロマークを1番目として時計回りに数えて2,4,9番目の基準色マークP2の色彩データ(色相、彩度、明度)と比較して、各カラーコードマークP3の色彩が赤、黄、緑、シアン、青、マゼンタのいずれであるかを判別する。このとき、カラーコードマークP3の数とコード色数を等しくするという条件を課すと、全てのコード色がカラーコードマークP3に使用されるため、基準色マークP2との比較のみで無く、カラーコードマークP3間で色を相対比較することにより、信頼性を上げることができる。なお、基準色マークP2の色彩はカラーコードマークP3の色彩の補正の他に、測定対象物2の色彩の補正にも使用できる。また、カラーコード判別部75は、色彩−コード対応表とカラーコードターゲット対応表を用いて、色彩データをカラーコードに変換する。すなわち、レトロマークを1番目として時計回りに数えて6,7,11,12,14,15番目のカラーコードマークP3の色彩データ(色相、彩度、明度)をこの配列順の色彩配列データとし、この色彩配列データをカラーコードに変換する。次に、ラベリングを行なう(S260)。この工程はカラーコード記憶工程(S180)に該当する。すなわち、判別したカラーコードをカラーコードターゲットTB1〜TB3の基準位置(中心)C0に対応付けてカラーコード記憶部85に記憶する(S260)。これにより、カラーコードターゲットTA1〜TA3の基準位置にカラーコードがラベルとして付される。まだ、探索する他のカラーコードターゲットTB1〜TB3があれば基準位置マーク検出工程(S110、S210)に戻ってこれを探索し、なければ、処理を修了する。
【0045】
以上により、本実施例によれば、位置マークをターゲットの中心に配置する場合に、カラーコードマークの検出及びカラーコードの判別が容易であるカラーコードターゲットを提供できる。また、かかるカラーコードターゲットのカラーコードの判別に適するカラーコード判別装置及びカラーコード判別方法を提供できる。
【実施例2】
【0046】
図9に実施例2におけるカラーコードターゲットTB4の例を示す。実施例2では区切マークP4がテンプレートマークである例を示す。テンプレートマークになっているため、区切マークP4の中心位置(円周方向には対称線上で半径方向には内径と外径のほぼ中間)を特定でき、位置マークとして利用することが可能である。これにより、マーク配置検出工程(S140)では6個のテンプレートマークの中心位置を結ぶ円環をスキャンすれば良い。また、テンプレートマーク間の距離からその間のマークが基準色マークP2かカラーコードマークかの区別ができる。ここでは、区切マークのレトロマークがないが、これらのテンプレートマークの配置からマーク検出の起点を定められる。また、円環の半径を効率良く検出できる。また、カラーコードターゲットTB4の傾きを容易に検出できる。
基準位置マークP0、基準色マークP2、カラーコードマークP3の配置は実施例1と同様であり、位置マークをターゲットの中心に配置する場合に、カラーコードマークの検出及びカラーコードの判別が容易であるカラーコードターゲットを提供できる。
【実施例3】
【0047】
図10に実施例3におけるカラーコードターゲットTB5の例を示す。円環(リング)の外側(外枠領域)に基準位置マークP0と円環の間(内枠領域)と同様に黒色の領域を設けた例を示す。これにより、基準色マークP2、カラーコードマークP3及びレトロマークと周囲との差異が明確になる。よって、これらのマークを検出し易くなる。また、基準位置マークP0と周囲との差異も明確である。なお、実施例1とレトロマークの位置が異なる。これは、マーク検出の起点を変更するものであるが、本質的なものではない。その他、基準位置マークP0、基準色マークP2、カラーコードマークP3、区切マークP4(レトロマークの配置を除く)の配置は実施例1と同様であり、位置マークをターゲットの中心に配置する場合に、カラーコードマークの検出及びカラーコードの判別が容易であるカラーコードターゲットを提供できる。
【実施例4】
【0048】
図11に実施例4におけるカラーコードターゲットTB6の例を示す。実施例3では、円環(リング)の外側の領域(外枠領域)及び基準位置マークP0と円環の間の領域(内枠領域)が黒色であったが、実施例4ではこれらの領域が白色(図中Wで示す)になっている。また、実施例3では、基準位置マークP0がレトロ機能を有していたが、実施例4では黒色(図中BLで示す)になっている。この場合でも、基準色マークP2、カラーコードマークP3及びレトロマークと周囲との差異が明確になる。よって、これらのマークを検出しやすくなる。また、基準位置マークP0と周囲との差異も明確である。その他、基準色マークP2、カラーコードマークP3、区切マークP4の配置は実施例3と同様であり、位置マークをターゲットの中心に配置する場合に、カラーコードマークの検出及びカラーコードの判別が容易であるカラーコードターゲットを提供できる。
【実施例5】
【0049】
図12に実施例5におけるカラーコードターゲットTB7の例を示す。実施例1では、円環(リング)が1つであったが、実施例5では円環が2重の例を示す。内側の円環は実施例3と同様であるが、外側に別の円環が設けられている。基準色マークP2、カラーコードマークP3及び区切マークP4の円周方向の配置は内側の円環と同じであり、カラーコードマークP3の配色の順序が変更されている。円環が2重のため、カラーコードマークP3の数が倍(n=12個)になっており、識別可能なコード数が612と増大している。その他、基準位置マークP0、基準位置マークP0と円環の間の領域(内枠領域)は実施例3と同様であり、位置マークをターゲットの中心に配置する場合に、カラーコードマークの検出及びカラーコードの判別が容易であるカラーコードターゲットを提供できる。
【実施例6】
【0050】
図13に実施例6におけるカラーコードターゲットTB8の例を示す。実施例5に比して、2つの円環が黒色の領域で区切られており、さらに外側の円環の外側(外枠領域)に黒色の領域が設けられている。これにより、2つの円環を明確に区別できる。よって、円環スキャンの見誤りを少なくできる。その他、基準位置マークP0、基準色マークP2、カラーコードマークP3、区切マークP4の配置は実施例5と同様であり、位置マークをターゲットの中心に配置する場合に、カラーコードマークの検出及びカラーコードの判別が容易であるカラーコードターゲットを提供できる。
【実施例7】
【0051】
図14に実施例7におけるカラーコードターゲットTB9の例を示す。実施例3ではカラーコードターゲットの外形が円形であるが、実施例7では多角形になっている。このため、カラーコードターゲットTB9の傾きを容易に見分けられる。その他のマーク配置は実施例3と同様であり、位置マークをターゲットの中心に配置する場合に、カラーコードマークの検出及びカラーコードの判別が容易であるカラーコードターゲットを提供できる。
【実施例8】
【0052】
図15に実施例8におけるカラーコードターゲットTB10の例を示す。実施例8では円環に位置マークP1が設けられている例を説明する。すなわち、実施例1では円環に区切マークP4が設けられているが、図15に示すように、実施例8では区切マークが位置マークP1に置換されている。位置マークP1は計測位置を示すマークであり、黒(図中BLで示す)地のマークの中心(円周方向には対称線上で半径方向には内径と外径の中間)に小型円形の再帰反射機能を有するターゲット(レトロターゲット)が設けられている。小型円形のレトロターゲットは位置検出を可能にするため、或る程度以上の寸法とすることが好ましく、例えば外径をマークの環の半径方向の幅の半分程度とする。位置マークP1は区切マークを兼ねている。黒地とするのは、レトロターゲットとの差異を明確にして位置検出を容易にするため、また、区切マークとして、マーク間又はマーク群間の区切を明確にするためである。このように、位置マークP1を設けることにより、マーク配置検出工程(S140)では6個の位置マークP1の小型円形のレトロターゲットの中心を結ぶ円環をスキャンすれば良い。また、小型円形のレトロターゲット間の距離からその間のマークが基準色マークP2かカラーコードマークP3かの区別ができる。ここでは、区切マークとしてのレトロマークがないが、各位置マークP1(6個)の小型円形のレトロターゲットの配置からマーク検出の起点を定められる。また、円環の半径を効率良く求められ、スキャンする円環を容易に検出できる。また、カラーコードターゲットTB10の傾きを容易に検出できる。基準色マークP2、カラーコードマークP3の配置は実施例1と同様であり、位置マークをターゲットの中心に配置する場合に、カラーコードマークの検出及びカラーコードの判別が容易であるカラーコードターゲットを提供できる。
【0053】
図16にカラーコードターゲットTB10の抽出の処理フロー例を示す。カラーコードターゲットTB10の基準位置C0に基準位置マークP0が設けられ、基準位置マークP0の周囲の円環に位置マークP1が設けられている。まず、カラーコードターゲットTB10の中心の基準位置マークP0を検出する(S310)。次に、基準位置マークP0の周囲の円環上の6個の位置マークP1を検出する(S320)。これらの工程は図5の位置マーク検出工程(S110)に該当する。位置マークP1にも小型円形のレトロターゲットが設けられており、小型円形のレトロターゲットの検出も基準位置マークP0の検出と同様に、図6のレトロターゲットを用いた重心位置検出を適用できる。次に、単写真標定又はDLT法を用いて又はDLT法とバンドル調整を組み合わせて、位置マークP1の中心の6点の位置を確認する(S330)。この工程は基準位置算定工程(S120)に該当する。カラーコードターゲットTBの位置マークP1の中心として検出された6点について、カラーコードターゲット(リングカラーコードターゲット)TB10の設計された位置に配置されているか否かを確認する。DLT法とバンドル調整の演算は例えば三次元位置演算部64で行ない、基準位置算定部63がその演算結果を得る。
【0054】
[DLT法計算式]
3次元DLT(Direct Linear Transformation)法とは、三角測量の原理に基づき、2台以上のカメラを用い多方面から計測したマークの位置を三次元座標に再構築する方法である。
DLT法は、写真座標と被写体の3次元座標(対象点座標)との関係を3次の射影変換式で近似したものである。
DLT法の基本式は(式3−1)となる。
【数1】
(式3−1)に対し、分母を消去すると、次の線形式を導き出せる。
【数2】
更に、(式3−2)を変形すると、以下の式となる。
【数3】
(式3−3)を直接、最小二乗法を用いて解くと、写真座標と対象点座標との関係を決定するL1〜L11の11個の未知変量を取得できる。
【0055】
図17はDLT法による位置マークP1の確認を説明するための図である。L1〜L11の11個の未知変量が分かると、これにより、写真座標(x,y)(CCD面)と対象点座標(X,Y,Z)の関係が分かり、写真座標(x,y)と対象点座標(X,Y,Z)を結ぶ線上にあるカメラの位置と方向(0,0,0,κ,φ,ω)が求まる。これにより、位置マークP1は設計データよりあるべき位置(円環上の6点であること)が分かっているので、位置マークP1として検出された6点について求めるべきカラーコードターゲットTB10(リングカラーコードターゲット)の候補点かどうかの判定が可能となる。
【0056】
[外部標定要素の算出:相互標定]
次に、相互標定法によってカメラの位置、傾きを求める方法について説明する。標定は標定部62にて行なう。
モデル画像とは、2枚以上の立体写真から被写体が撮影されたときの状態に再現されたとき得られる立体像のことをいう。相対的に相似なモデル画像を形成することを、相互標定という。すなわち、相互標定とは、立体写真の対応する2本の光束が交会するように、左右それぞれのカメラの投影中心の位置および傾きを定めるものである。
【0057】
図18は相互標定を説明するための図である。次に,各モデル画像の標定計算の詳細について説明する。この計算により、左右それぞれのカメラの位置(三次元座標と三軸の傾き)が求められる。
以下の共面条件式によりこれらのカメラの位置に係るパラメータを求める。
【数4】
【0058】
モデル座標系の原点を左側の投影中心にとり、右側の投影中心を結ぶ線をX軸にとるようにする。縮尺は、基線長を単位長さにとる。このとき求めるパラメータは、左側のカメラのZ軸の回転角κ1、Y軸の回転角φ1、右側のカメラのZ軸の回転角κ2、Y軸の回転角φ2、X軸の回転角ω2の5つの回転角となる。この場合左側のカメラのX軸の回転角ω1は0なので、考慮する必要ない。
【0059】
このような条件にすると、(式4)の共面条件式は(式5)のようになり、この式を解けば各パラメータが求まる。
【数5】
【0060】
ここで、モデル座標系XYZとカメラ座標系xyzの間には、次に示すような座標変換の関係式(式8)、(式7)が成り立つ。
【数6】
【0061】
これらの式を用いて、次の手順により、未知パラメータを求める。
(a)未知パラメータの初期近似値は通常0とする。
(b)共面条件式(式5)を近似値のまわりにテーラー展開し、線形化したときの微分係数の値を(式6)、(式7)により求め、観測方程式をたてる。
(c)最小二乗法をあてはめ、近似値に対する補正量を求める。
(d)近似値を補正する。
(e)補正された近似値を用いて、(b)〜(d)までの操作を収束するまで繰り返す。
未知パラメータ(κ1,φ1,κ2,φ2,ω2)を求めることにより、カメラの位置と傾きが求まる。
【0062】
[バンドル調整]
バンドル調整は複数の撮影画像間における計測点の位置座標を適切に合わせるために行われる。投影中心、写真像および測定対象物が一直線上にあるというバンドル調整の基本式である共線条件式は次のようになる。
【数7】
バンドル調整を用いることにより、DLT法単独を用いるよりもさらに高精度の確認ができる。
【0063】
ここで、図16に戻る。次に、カラーコードの判別を行なう(S340)。この工程はカラーコード判別工程(S170)に該当する。カラーコードマークの配色からコードを読み込み、カラーコードを判別する。次に、ラベリングを行なう(S350)。この工程はカラーコード記憶工程(S180)に該当する。すなわち、判別したカラーコードをカラーコードターゲットTB10の基準位置(中心)C0に対応付けてカラーコード記憶部85に記憶する(S270)。これにより、カラーコードターゲットTB10の基準位置にカラーコードがラベルとして付される。まだ、探索する他のカラーコードターゲットTB10があれば基準位置マーク検出工程(S110,S310)に戻ってこれを探索し、なければ、処理を修了する。これにより、カラーコードターゲットTB10のカラーコードの判別に適するカラーコード判別方法を提供できる。
【0064】
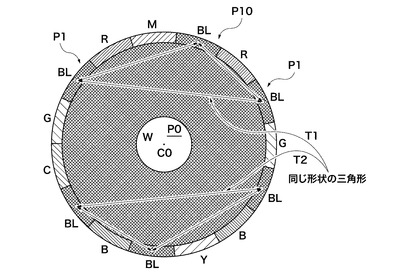
図19に各位置マークP1間の位置関係を示す。基準位置マークP0の上方に位置する位置マークP10を1番目として時計回りに数えて1,3,13番目のマークの小型円形のレトロターゲットの中心を結ぶ第1の三角形T1と、基準位置マークP0の上方に位置する位置マークP10を1番目として時計回りに数えて5,8,10番目のマークの小型円形のレトロターゲットの中心を結ぶ第2の三角形T2が形成されている。第1の三角形T1と第2の三角形T2の形状は合同であり、第1の三角形T1の最長辺と第2の三角形T2の最長辺とはマークの環を上下半分に仕切る直線(水平方向の直径)に対して向かい合うように配置されている。したがって、位置マークP1の検出に際して、かかる関係の2つの三角形T1,T2を見出すことにより、検出が容易になる。なお、合同な三角形の代わりに反転対称の三角形を用いても良い。各位置マークP1は基準位置C0に対して所定の位置関係(一定の距離、一定の方向)に配置される。したがって、第1の三角形T1(頂点、辺)と第2の三角形T2(頂点、辺)との位置関係(距離と方向)も一定になる。
【0065】
そして、円環の抽出を確実に行なうために、位置マークP1の検出(S320)後に、形状が合同であり、両者の最長辺が向かい合うような関係にある2つの三角形T1,T2を形成する工程を追加しても良い。まず、カラーコードターゲットTB10の位置マークP1の候補を全てを検出する。位置マークP1の座標は中心の小型円形のレトロターゲットで検出する。この工程は位置マーク検出工程(S110)に該当する。次に、検出した位置マークの候補から三角形(第1の三角形T1及び第2の三角形T2)の候補を全て検出する。この際に、検出された位置マークの候補を結線して形成された三角形の辺の長さと2辺のなす角度から、求めるべき三角形(第1の三角形T1及び第2の三角形T2)の候補にそぐわないものは排除する。三角形の辺の長さ、2辺のなす角度から求めるべき三角形(第1の三角形T1又は第2の三角形T2)の候補と見なすことができれば、第1の三角形T1又は第2の三角形T2の候補と決定する。続いて、検出した三角形(T1,T2の候補)から、対応する三角形(形状が合同であり、互いの最長辺が向かい合うような関係にある)を検出し、カラーコードターゲット(リングカラーコードターゲット)TB10の位置マークP1の候補の6点を検出する。これらの工程は基準位置算定工程(S120)の前段に該当する。すなわち、決定した三角形(T1,T2)の候補の中から任意の1つの三角形を選択して仮の三角形T1とし、次いで、決定した三角形(T1,T2)の候補の中から任意の他の1つの三角形を選択して仮の三角形T2とし、仮の三角形T1との位置関係(仮の三角形T1からの距離と方向)から、形状が合同であり、互いの最長辺が向かい合うような関係にあるか否かをチェックする。各位置マークP1は基準位置C0に対して所定の位置関係(一定の距離、一定の方向)に配置される。したがって、第1の三角形T1(頂点、辺)と第2の三角形T2(頂点、辺)との位置関係も一定の関係(距離と方向(向き))になる。この関係から求めるべき第1の三角形T1及び第2の三角形T2と見なすことができれば、形成された第1の三角形T1及び対応する第2の三角形T2の頂点に位置する位置マークP1の中心として6点を検出する。次に、単写真標定又はDLT法を用いて又はDLT法とバンドル調整を組み合わせて、位置マークP1の中心の6点の位置を確認する(S330)。
【0066】
以上、本発明の実施の形態について説明したが、本発明は上記の実施例に限定されるものではなく、本発明の趣旨を逸脱しない範囲で実施例に種々変更を加えられることは明白である。
【0067】
例えば、以上の実施例では、マークが基準位置C0を中心とする円周に沿って環状に配置される例を説明したが、正多角形の外周に沿って環状に配置されても良い。また、基準色が3色、カラーコード色が6色の例を説明したが、基準色が1色以上、カラーコード色が2色以上であれば良く、また、基準色マーク数が1以上、カラーコードマーク数が1以上であれば良い。なお、カラーコードマーク数が1の場合は基準色マークとカラーコードマークの円周方向又は半径方向の幅を変えれば両者の区別が可能である。カラーコード色数が多いほど使用できるコード数は多くなり、少ないほど色彩の差を判別し易く、処理を簡素にできる。基準色数は、典型的には光の3原色を使用するが、カラーコード色数に応じて変更可能である。また、以上の実施例では、マークの環の数が1重又は2重の例を説明したが、3重以上でも良い。環の数が多いほど使用できるコード数は多くなり、少ないほど簡素な構成で、処理も簡素になる。また、マークの環が2重の場合には基準色マークを内側の環に配置し、カラーコードマークを外側の環に配置して区別しても良い。また、以上の実施例では基準位置マークの中心が基準位置C0であり、カラーコードターゲットの中心と一致する例を説明したが、カラーコードターゲットの中心から或る程度偏心させても良い。また、カラーコード識別装置については、例えば、入力部、出力部、起点算定部、対応点探索部、標定部等を省略し、簡素化した構成とすることも可能である。また、カラーコード識別方法については、工程の順序は変更可能であり、例えば、マークの環からの色彩データの採集は、起点の算定前に行なっても良く、マーク配置検出工程後、マーク抽出工程で改めて採集しても良い。また、以上の実施例では、円環上をスキャンして採集された色彩データが設計データに合致するか否かの判定はカラーコードマーク抽出工程で行なう例を説明したが、マーク配置検出工程で色彩データを採取して行なっても良い。また、基準色マーク抽出工程とカラーコードマーク抽出工程はどちらを先にしても良い。また、実施例8ではターゲット毎に対応する2つの三角形を抽出する例を説明したが、計測範囲の複数のカラーコードターゲットにわたり対応する2つの三角形を抽出しても良い。その他、マークの外形(4,6,8角形にする等)、区切マークが挟むマーク数、カラーコード色数、カラーコードマーク数等を適宜変更可能である。
【産業上の利用可能性】
【0068】
本発明は様々な三次元計測に用いられる。特に広大な対象物、複雑な形状の対象物など、多数のターゲットを要する三次元計測に用いられる。
【符号の説明】
【0069】
1 カラーコード判別装置
2 測定対象物
3 撮影部
4 入出力部
5 特徴抽出部
6 三次元位置計測部
7 画像処理部
8 記憶部
9 制御部
10 PC
31 ターゲット画像取得部
41 表示部
42 出力部
43 入力部
51 位置マーク検出部
52 特徴点抽出部
61 対応点探索部
62 標定部
63 基準位置算定部
64 三次元位置演算部
71 起点算定部
72 マーク配置検出部
73 基準色マーク抽出部
74 カラーコードマーク抽出部
75 カラーコード判別部
81 撮影画像記憶部
82 三次元位置記憶部
83 基準色マーク記憶部
84 カラーコードマーク記憶部
85 カラーコード記憶部
200 レトロターゲット
204 内円部
206 外円部
C0 基準位置
P0 基準位置マーク
P1,P10 位置マーク
P2 基準色マーク
P3 カラーコードマーク
P4 区切マーク
To しきい値
T1 第1の三角形
T2 第2の三角形
TB,TB1〜10 カラーコードターゲット
【特許請求の範囲】
【請求項1】
基準位置を示すための基準位置マークからなる位置マーク部と;
色彩の基準として用いる色彩が施された基準色マークからなる基準色部と;
当該カラーコードターゲットを識別するための色彩が施されたカラーコードマークからなるカラーコード部と;
前記基準色マークと前記カラーコードマークの間、前記基準色マーク同士の間又は前記カラーコードマーク同士の間を区切る区切マークからなるマーク区切部とを面内に備え;
前記基準色マークと前記カラーコードマークと前記区切マークが、前記基準位置を中心とする円周又は正多角形の外周に沿って環状に配置され;
前記基準位置に前記基準位置マークが配置され;
前記区切マークは、第1の所定数の前記基準色マークを挟み、第2の所定数の前記カラーコードマークを挟むように配置される;
カラーコードターゲット。
【請求項2】
前記第1の所定数は1であり、前記第2の所定数は2以上の定数である;
請求項1に記載のカラーコードターゲット。
【請求項3】
前記カラーコードマークのマーク数と前記カラーコードに用いる色彩の数とが一致し、前記カラーコード部を構成する各カラーコードマークの色彩が全て異なる;
請求項1又は請求項2に記載のカラーコードターゲット。
【請求項4】
前記基準色マークと前記カラーコードマークは前記基準位置に対して所定の位置関係に配置される;
請求項1ないし請求項3のいずれか1項に記載のカラーコードターゲット。
【請求項5】
前記区切マークの1つが、他の区切マークと形状、模様、色彩のいずれかが異なる;
請求項1ないし請求項4のいずれか1項に記載のカラーコードターゲット。
【請求項6】
前記円周又は正多角形の外周に沿って環状に配置されるマークの環は単数である;
請求項1ないし請求項5のいずれか1項に記載のカラーコードターゲット。
【請求項7】
前記円周又は正多角形の外周に沿って環状に配置されるマークの環は複数であり、各前記マークの環はいずれも前記基準位置を中心とする;
請求項1ないし請求項5のいずれか1項に記載のカラーコードターゲット。
【請求項8】
1つの前記マークの環上に配置される前記基準色マークと前記カラーコードマークと前記区切マークは同じ形状及び寸法で統一されている;
請求項6又は請求項7に記載のカラーコードターゲット。
【請求項9】
前記区切マークは計測位置を示すための位置マークを兼ねる;
請求項1ないし請求項8のいずれか1項に記載のカラーコードターゲット。
【請求項10】
請求項1ないし請求項9のいずれか1項に記載のカラーコードターゲットを複数組み合わせて構成される1組のカラーコードターゲットであって;
各カラーコードターゲットは、前記基準位置マークが前記基準位置を含む同一位置に配置され、前記基準色マーク、前記カラーコードマーク及び前記区切マークが前記マークの環上の同一位置に配置され、前記基準色マークの色彩の配置が同一であり、前記カラーコードマークの色彩の配置が全て異なるように構成される;
1組のカラーコードターゲット。
【請求項11】
請求項1に記載のカラーコードターゲットの画像を取得するターゲット画像取得部と;
前記ターゲット画像取得部で取得されたカラーコードターゲットの画像から前記基準位置マークを検出する位置マーク検出部と;
前記位置マーク検出部で検出された基準位置マークから前記カラーコードターゲットの前記基準位置を求める基準位置算定部と;
前記基準位置算定部で求められた基準位置を中心とする円周又は正多角形の外周に沿って環状に配置されたマークを順次検出するマーク配置検出部と;
前記マーク配置検出部で検出されたマークの環から各前記基準色マークを順次抽出する基準色マーク抽出部と;
前記マーク配置検出部で検出されたマークの環から前記カラーコードマークを順次抽出するカラーコードマーク抽出部と;
前記基準色マーク抽出部で抽出された各基準色マークの色彩と前記カラーコードマーク抽出部で抽出された各カラーコードマークの色彩を比較して、前記カラーコードマークの色彩の配置からカラーコードを判別するカラーコード判別部と;
前記基準位置算定部で求められた基準位置と前記カラーコード判別部で判別されたカラーコードとを対応付けて記憶するカラーコード記憶部とを備える;
カラーコード判別装置。
【請求項12】
前記カラーコードターゲットは、他の区切マークと形状、模様、色彩のいずれかが異なる1つの区切マークを有し;
前記1つの区切マークの配置に基づいて前記マーク配置検出部で前記環状に配置されたマークを検出する起点を求める起点算定部を備え;
前記マーク配置検出部は前記起点算定部で求められた起点から前記マークを順次検出する;
請求項11に記載のカラーコード判別装置。
【請求項13】
請求項1に記載のカラーコードターゲットの画像を取得するターゲット画像取得工程と;
前記ターゲット画像取得工程で取得されたカラーコードターゲットの画像から前記基準位置マークを検出する位置マーク検出工程と;
前記位置マーク検出工程で検出された基準位置マークから前記カラーコードターゲットの前記基準位置を求める基準位置算定工程と;
前記基準位置算定工程で求められた基準位置を中心とする円周又は正多角形の外周に沿って環状に配置されたマークを検出するマーク配置検出工程と;
前記マーク配置検出工程で検出されたマークの環から前記基準色マークを順次抽出する基準色マーク抽出工程と;
前記マーク配置検出工程で検出されたマークの環から前記カラーコードマークを順次抽出するカラーコードマーク抽出工程と;
前記基準色マーク抽出工程で抽出された基準色マークの色彩と前記カラーコードマーク抽出工程で抽出されたカラーコードマークの色彩を比較して、前記カラーコードマークの色彩の配置からカラーコードを判別するカラーコード判別工程と;
前記基準位置算定工程で求められた基準位置と前記カラーコード判別工程で判別されたカラーコードとを対応付けて記憶するカラーコード記憶工程とを備える;
カラーコード判別方法。
【請求項14】
前記カラーコードターゲットは、他の区切マークと形状、模様、色彩のいずれかが異なる1つの区切マークを有し;
前記1つの区切マークの配置に基づいて前記マーク配置検出工程で前記環状に配置されたマークを検出する起点を求める起点算定工程を備え;
前記マーク配置検出工程は記起点算定工程で求められた起点から前記マークを順次検出する;
請求項13に記載のカラーコード判別方法。
【請求項1】
基準位置を示すための基準位置マークからなる位置マーク部と;
色彩の基準として用いる色彩が施された基準色マークからなる基準色部と;
当該カラーコードターゲットを識別するための色彩が施されたカラーコードマークからなるカラーコード部と;
前記基準色マークと前記カラーコードマークの間、前記基準色マーク同士の間又は前記カラーコードマーク同士の間を区切る区切マークからなるマーク区切部とを面内に備え;
前記基準色マークと前記カラーコードマークと前記区切マークが、前記基準位置を中心とする円周又は正多角形の外周に沿って環状に配置され;
前記基準位置に前記基準位置マークが配置され;
前記区切マークは、第1の所定数の前記基準色マークを挟み、第2の所定数の前記カラーコードマークを挟むように配置される;
カラーコードターゲット。
【請求項2】
前記第1の所定数は1であり、前記第2の所定数は2以上の定数である;
請求項1に記載のカラーコードターゲット。
【請求項3】
前記カラーコードマークのマーク数と前記カラーコードに用いる色彩の数とが一致し、前記カラーコード部を構成する各カラーコードマークの色彩が全て異なる;
請求項1又は請求項2に記載のカラーコードターゲット。
【請求項4】
前記基準色マークと前記カラーコードマークは前記基準位置に対して所定の位置関係に配置される;
請求項1ないし請求項3のいずれか1項に記載のカラーコードターゲット。
【請求項5】
前記区切マークの1つが、他の区切マークと形状、模様、色彩のいずれかが異なる;
請求項1ないし請求項4のいずれか1項に記載のカラーコードターゲット。
【請求項6】
前記円周又は正多角形の外周に沿って環状に配置されるマークの環は単数である;
請求項1ないし請求項5のいずれか1項に記載のカラーコードターゲット。
【請求項7】
前記円周又は正多角形の外周に沿って環状に配置されるマークの環は複数であり、各前記マークの環はいずれも前記基準位置を中心とする;
請求項1ないし請求項5のいずれか1項に記載のカラーコードターゲット。
【請求項8】
1つの前記マークの環上に配置される前記基準色マークと前記カラーコードマークと前記区切マークは同じ形状及び寸法で統一されている;
請求項6又は請求項7に記載のカラーコードターゲット。
【請求項9】
前記区切マークは計測位置を示すための位置マークを兼ねる;
請求項1ないし請求項8のいずれか1項に記載のカラーコードターゲット。
【請求項10】
請求項1ないし請求項9のいずれか1項に記載のカラーコードターゲットを複数組み合わせて構成される1組のカラーコードターゲットであって;
各カラーコードターゲットは、前記基準位置マークが前記基準位置を含む同一位置に配置され、前記基準色マーク、前記カラーコードマーク及び前記区切マークが前記マークの環上の同一位置に配置され、前記基準色マークの色彩の配置が同一であり、前記カラーコードマークの色彩の配置が全て異なるように構成される;
1組のカラーコードターゲット。
【請求項11】
請求項1に記載のカラーコードターゲットの画像を取得するターゲット画像取得部と;
前記ターゲット画像取得部で取得されたカラーコードターゲットの画像から前記基準位置マークを検出する位置マーク検出部と;
前記位置マーク検出部で検出された基準位置マークから前記カラーコードターゲットの前記基準位置を求める基準位置算定部と;
前記基準位置算定部で求められた基準位置を中心とする円周又は正多角形の外周に沿って環状に配置されたマークを順次検出するマーク配置検出部と;
前記マーク配置検出部で検出されたマークの環から各前記基準色マークを順次抽出する基準色マーク抽出部と;
前記マーク配置検出部で検出されたマークの環から前記カラーコードマークを順次抽出するカラーコードマーク抽出部と;
前記基準色マーク抽出部で抽出された各基準色マークの色彩と前記カラーコードマーク抽出部で抽出された各カラーコードマークの色彩を比較して、前記カラーコードマークの色彩の配置からカラーコードを判別するカラーコード判別部と;
前記基準位置算定部で求められた基準位置と前記カラーコード判別部で判別されたカラーコードとを対応付けて記憶するカラーコード記憶部とを備える;
カラーコード判別装置。
【請求項12】
前記カラーコードターゲットは、他の区切マークと形状、模様、色彩のいずれかが異なる1つの区切マークを有し;
前記1つの区切マークの配置に基づいて前記マーク配置検出部で前記環状に配置されたマークを検出する起点を求める起点算定部を備え;
前記マーク配置検出部は前記起点算定部で求められた起点から前記マークを順次検出する;
請求項11に記載のカラーコード判別装置。
【請求項13】
請求項1に記載のカラーコードターゲットの画像を取得するターゲット画像取得工程と;
前記ターゲット画像取得工程で取得されたカラーコードターゲットの画像から前記基準位置マークを検出する位置マーク検出工程と;
前記位置マーク検出工程で検出された基準位置マークから前記カラーコードターゲットの前記基準位置を求める基準位置算定工程と;
前記基準位置算定工程で求められた基準位置を中心とする円周又は正多角形の外周に沿って環状に配置されたマークを検出するマーク配置検出工程と;
前記マーク配置検出工程で検出されたマークの環から前記基準色マークを順次抽出する基準色マーク抽出工程と;
前記マーク配置検出工程で検出されたマークの環から前記カラーコードマークを順次抽出するカラーコードマーク抽出工程と;
前記基準色マーク抽出工程で抽出された基準色マークの色彩と前記カラーコードマーク抽出工程で抽出されたカラーコードマークの色彩を比較して、前記カラーコードマークの色彩の配置からカラーコードを判別するカラーコード判別工程と;
前記基準位置算定工程で求められた基準位置と前記カラーコード判別工程で判別されたカラーコードとを対応付けて記憶するカラーコード記憶工程とを備える;
カラーコード判別方法。
【請求項14】
前記カラーコードターゲットは、他の区切マークと形状、模様、色彩のいずれかが異なる1つの区切マークを有し;
前記1つの区切マークの配置に基づいて前記マーク配置検出工程で前記環状に配置されたマークを検出する起点を求める起点算定工程を備え;
前記マーク配置検出工程は記起点算定工程で求められた起点から前記マークを順次検出する;
請求項13に記載のカラーコード判別方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2011−53031(P2011−53031A)
【公開日】平成23年3月17日(2011.3.17)
【国際特許分類】
【出願番号】特願2009−200902(P2009−200902)
【出願日】平成21年8月31日(2009.8.31)
【出願人】(000220343)株式会社トプコン (904)
【Fターム(参考)】
【公開日】平成23年3月17日(2011.3.17)
【国際特許分類】
【出願日】平成21年8月31日(2009.8.31)
【出願人】(000220343)株式会社トプコン (904)
【Fターム(参考)】
[ Back to top ]