
カラーコード付き標識及びキャリブレーションボックス
【課題】光源によらない一定の色に補正することを可能にするカラーコード付き標識を提供する。
【解決手段】本発明におけるカラーコード付き標識CTは、面内に、計測位置を示すための位置検出用パターンP1と、色彩の基準として用いる色彩が施された基準色パターンP2と、位置検出用パターンP1に対して所定の位置関係に配置され、標識を識別するための複数の色彩が施されたカラーコードパターンP3と、光源色補正に用いる色彩が施された輝度スケールパターンP5とを有する。
【解決手段】本発明におけるカラーコード付き標識CTは、面内に、計測位置を示すための位置検出用パターンP1と、色彩の基準として用いる色彩が施された基準色パターンP2と、位置検出用パターンP1に対して所定の位置関係に配置され、標識を識別するための複数の色彩が施されたカラーコードパターンP3と、光源色補正に用いる色彩が施された輝度スケールパターンP5とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はカラーコード付き標識及びキャリブレーションボックスに関する。詳しくは、撮影画像間の色ずれの補正に使用可能なカラーコード付き標識及びキャリブレーションボックスに関する。
【背景技術】
【0002】
測定対象物の3次元モデルを形成するには、測定対象物を囲む円周上に配置されたデジタルカメラを用いて測定対象物を撮影し、その撮影画像をステレオマッチング法により3次元モデリングする手法等が用いられる。この場合色彩の補正は例えば発明者達が提案したカラーコードターゲットの基準色パターンを用いて行なわれていた(特許文献1、非特許文献1参照)。また、例えば発明者達が提案した撮影パラメータのキャリブレーションが行なわれていた(特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−101277号公報
【特許文献2】特開2007−147457号公報
【非特許文献】
【0004】
【非特許文献1】森山拓哉,高地伸夫,山田光晴,深谷暢之,村井俊治:“カラーコードターゲットによる自動識別方法”,写真測量とリモートセンシング,Vol.49,No.1,2010.
【発明の概要】
【発明が解決しようとする課題】
【0005】
複数台のデジタルカメラで撮影した画像を人体モデル等の光により色彩が微妙に変化する測定対象物に重ね合わせた場合、光学的に不整合(色ずれ)の発生したテクスチャとなる。これは各カメラにより露出やホワイトバランスなどのパラメータが異なることにより発生するものである。カメラパラメータを統一した場合においてもデジタルカメラの個体差があり、色誤差が発生してしまうという問題があった。特に、同じ表面色を有する測定対象物でも光源により異なった色彩に撮影され、色誤差が発生してしまうという問題があった。
【0006】
本発明は、画像の色彩を光源によらない一定の色に統一する補正を可能にするカラーコード付き標識を提供すること、及び画像の色彩を光源によらない一定の色に統一する補正を可能にするキャリブレーションボックスを提供することを目的とする。
【課題を解決するための手段】
【0007】
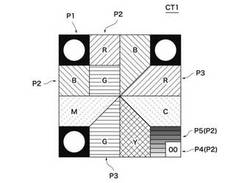
上記課題を解決するために、本発明の第1の態様に係るカラーコード付き標識CT1は、例えば図1に示すように、面内に、計測位置を示すための位置検出用パターンP1と、色彩の基準として用いる色彩及び光源色補正に用いる色彩が施された基準色パターンP2と、位置検出用パターンP1に対して所定の位置関係に配置され、標識を識別するための複数の色彩が施されたカラーコードパターンP3とを有し、光源色補正に用いる色彩が施された基準色パターンとして色相が同一で諧調の異なる複数の色を配置した輝度スケールパターンP5を有する。
【0008】
ここにおいて、光源色補正とは、同じ色でも光源によって異なって見えるので、画像の色彩を光源によらない一定の色に統一する補正をいう。光源色補正は広義の意味で、カラーバランスをとるための補正と輝度補正(濃淡補正)とからなる。狭義の光源色補正はカラーバランスをとるための補正である。カラーバランスをとるための補正は、白色パターン又は/及び光三原色パターン(RGBパターン)を用い、画像上で白色パターン又は/及び各RGBパターンに他の色が混入しないようにRGBの輝度(光量)の比率を調整するものである。色彩の基準として用いる色彩及び光源色補正に用いる色彩として白色パターン又は/及びこのカラーバランスをとるための光三原色パターン(RGBパターン)を用いることができる。白色のみ、光三原色(RGB)のみを用いることも可能であるが、両者を用いるとカラーバランスを高精度にとれるので好ましい。また、カラーバランスをとるためは、光三原色(RGB)の1つ又は2つを用いても不可であり、光三原色(RGB)のそれぞれがいずれかの単位領域又は輝度スケールに含まれる必要がある。また、光三原色(RGB)がそれぞれ既知のチャネル値(輝度値)を持つ必要がある。例えば白色領域は光三原色(RGB)の全てを有するので光源色補正に使用できる。白色を用いる場合、チャネル値(画素値I)を1とする。光三原色(RGB)を用いる場合、必ずしも同一輝度のRGBパターンを用いる必要はないが、同一輝度のRGBパターンを用いるとカラーバランスの精度が向上するので好ましい。基準色部の単位領域の色を黄(Y)、シアン(C)、マゼンタ(M)の組み合わせとすると、赤(R)、緑(G)、青(B)はそれぞれ2つ単位領域に含まれるので光源色補正に使用できる。黄(Y)と青(B)の組み合わせでも、赤(R)、緑(G)、青(B)はそれぞれ1つ単位領域に含まれるので光源色補正に使用できる。
【0009】
また、狭義の光源色補正において、逆レスポンス関数を推定するために、輝度スケールパターンP5を用いる。輝度スケールパターンの諧調数が多いほど精度の高い補正ができる。輝度スケールパターンを用いない場合は輝度1点のみのカラーバランスとなる。また、広義の光源色補正は輝度補正(濃淡補正)を含むので、輝度補正時にも輝度スケールパターンP5を用いる。輝度スケールパターンP5の色相は有彩色でも無彩色でも良い。また、色相が同一で諧調の異なる複数の色は諧調順に配置することが、逆レスポンス関数を求める処理を効率化できるので好適である。本態様における光源色補正は少なくとも狭義の光源色補正を含むものとする。特許請求の範囲及び明細書においても特にことわらない限りこの意味で用いられる。また、「光源によらない一定の色に統一する」とは、全色彩を完全に統一する補正に限られず、高精度の補正、低精度の補正を含むものとする。具体的には無彩色又は有彩色のいずれかの色彩で例えば(式5)の補正が行われていれば良い。この場合、輝度は(式3)に限られず他の関数で導かれても良い。
【0010】
また、「所定の位置関係に配置され」とは、位置検出用パターンP1に対してカラーコードパターンP3は予め定められた位置に配置されることを意味する。これにより、位置検出用パターンP1との位置関係からカラーコードパターンP3を抽出し、コード番号が判別可能になる。なお、1組のカラーコード付き標識においては、基準色パターンP2の配色(輝度スケールパターンP5の配色を含む)は全て同一であり、カラーコードパターンP3の配色は全て異なるものとなる。なお、カラーコード付き標識(カラーコードターゲット)について包括的に示すときはCT、個別に示す時はCTi(iは正整数)と表示することとする。
本態様のように構成すると、輝度スケールパターンP5を用いて光源色補正を行なうことにより、画像の色彩を光源によらない一定の色に統一する補正を可能にするカラーコード付き標識CTを提供できる。
【0011】
また、本発明の第2の態様に係るカラーコード付き標識CT1は、第1の態様において、例えば図1に示すように、輝度スケールパターンP5の色相が無彩色である。
ここにおいて、無彩色の輝度スケールパターンをグレースケールパターン又はグレートーンパッチ、有彩色の輝度スケールパターンをカラースケールパターン又はカラートーンパッチという。輝度スケールパターンP5が無彩色のときは、グレースケール領域又はグレートーンパッチ部ともいう。輝度スケールパターンは、白又は/及び黒を含んでも良く、含まなくても良い。含まない場合には、いずれかのパターン(例えば位置検出用パターンや次に述べる白色領域)に白又は/及び黒が含まれることが、輝度の最大値と最小値が明確になるので好ましい。また、グレースケールパターンはカラーバランスを調整するために使用される。すなわち、画像で、RGBが混入せず、無彩色が再現されるように、RGBの輝度が調整される。これをグレートーンパッチの各輝度において調整する。カラートーンパッチの場合には他のカラーが混入しているか否かを調べ、混入しないように調整する。
本態様のように構成すると、グレースケールパターンを用いて、広い輝度範囲にわたって精度の良い光源色補正ができる。
【0012】
また、本発明の第3の態様に係るカラーコード付き標識CT1は、第1の態様又は第2の態様において、例えば図1に示すように、基準色パターンP2は、輝度スケールパターンP5の外に光源色補正に用いる色彩として白色が施された白色領域P4を有する。
このように構成すると、白色領域P4を用いて、小面積で効率の良い光源色補正ができる。
【0013】
また、本発明の第4の態様に係るカラーコード付き標識CT3は、第2の態様又は第3の態様において、例えば図17に示すように、輝度スケールパターンP5がカラーコード付き標識CT3の中央部に配置されている。
このように構成すると、カラーコード付き標識CT3が貼り付けられた領域の中心近傍のデータを用いて輝度補正をするので、精度の良い色補正ができる。
【0014】
また、本発明の第5の態様に係るカラーコード付き標識CT4は、第2の態様又は第3の態様において、例えば図18に示すように、輝度スケールパターンP5がカラーコード付き標識CT4の周縁部に配置されている。
このように構成すると、既存のカラーコード付き標識の機能を損なうことなくそのまま利用できる。
【0015】
また、本発明の第6の態様に係るカラーコード付き標識CT5は、第1ないし第3のいずれかの態様において、例えば図19に示すように、位置検出用パターンP1を複数備え、複数の位置検出用パターンP1の全て又は一部が輝度スケールパターンP5を兼用する。
ここにおいて、一部とは例えば位置検出用パターン数が3の時に、そのうち1つ又は2つを輝度スケールパターンと兼用するなどである。
本態様のように構成すると、光源色補正のために面積を増加することなく、光源色補正を可能にする。
【0016】
また、本発明の第7の態様に係るカラーコード付き標識CT1は、第3の態様において、例えば図1に示すように、白色領域P4は目視用の識別記号が付された目視用コードを有し、輝度スケールパターンP5は白色領域P4に隣接して配置されている。
ここにおいて、図1の例では輝度スケールパターンは白色領域に隣接して配置されているといえる。また、輝度スケールパターンが白色領域分に囲まれている場合及び白色領域が輝度スケールパターンに囲まれている場合も輝度スケールパターンは白色領域に隣接して配置されているといえる。
本態様のように構成すると、目視用コードを用いて、カラーコード付き標識CT1を目視で識別できる。撮影範囲を調整するのに便宜である。
【0017】
また、本発明の第8の態様に係るカラーコード付き標識CT1は、第1の態様ないしは第7の態様において、例えば図1に示すように、カラーコード付き標識CT1は、矩形に形成され、位置検出用パターンP1を3個備え、3個の位置検出用パターンP3がカラーコード付き標識CT1の3隅に配置されている。
このように構成すると、1隅に位置検出用パターンP1がないので、これを利用してカラーコード付き標識CT1の傾きを求められ、カラーコードパターンの配置を容易に特定でき、コード番号を容易に求められる。
【0018】
また、本発明の第9の態様に係るカラーコード付き標識CT8は、第1の態様ないしは第7の態様において、例えば図23に示すように、円形又は円環状に形成され、複数の位置検出用パターンP1が同心円状に配置されている。
このように構成すると、円形の場合には矩形に比してリング状にスキャンすれば良いのでスキャンルートが単純である。さらに、円環状の場合には例えば突起や窪みのある対象物の測定に使用できる。また、円形の場合には円環状に比して製作が容易である。
【0019】
また、本発明の第10の態様に係るカラーコード付き標識CT13〜CT15は、面内に、計測位置を示すための位置検出用パターンP1と、色彩の基準として用いる色彩及び光源色補正に用いる色彩が施された基準色パターンP2と、位置検出用パターンP1に対して所定の位置関係に配置され、標識を識別するための複数の色彩が施されたカラーコードパターンP3とを有し、光源色補正に用いる色彩が施された基準色パターンP2として輝度がほぼ等しくなるような光三原色を用いる。
【0020】
ここにおいて、色彩の基準として用いる色彩及び光源色補正に用いる色彩としてカラーバランスをとるための光三原色(RGB)を用いることができる。ただし、各RGBパターンはそれぞれ既知のチャネル値(画素値I)を持つ必要がある。必ずしも同一輝度のRGBパターンを用いる必要はないが、同一輝度のRGBパターンを用いるとカラーバランスの精度が向上するので好ましい。また、ほぼ等しいの輝度の範囲は例えば±10%以内とする。
本態様のように構成すると、従来のカラーコードターゲットの色彩を調整することにより、光源色の補正が可能になる。光三原色(RGB)を画面上で輝度がほぼ等しくするので、RGBそれぞれの輝度をその近傍で調整することにより、容易にカラーバランスを取ることができる。また、光三原色が施された基準色パターンP2の単位領域を用いて、小面積で効率の良い光源色補正ができる。
【0021】
また、本発明の第11の態様に係るキャリブレーションパネルは、第1ないし第10のいずれかの態様に係るカラーコード付き標識CTが、同一面内に複数配置されている。
このように構成すると、1つのキャリブレーションパネルを用いて異なる複数の測定対象物位置に対して、パネルを移動しながらキャリブレーションができる。
【0022】
また、本発明の第12の態様に係るキャリブレーションボックスCBは、第1ないし第10のいずれかの態様に係るカラーコード付き標識CTが、例えば図3に示すように、多面体の各面に単数又は複数配置されている。
ここにおいて、多面体は3面体以上である。
本態様のように構成すると、測定対象物を周囲の複数の位置から撮影する場合のキャリブレーションに有効である。
【0023】
また、本発明の第13の態様に係るキャリブレーションボックスは、第1ないし第10のいずれかの態様に係るカラーコード付き標識CTが、円筒の面に配置されている。
このように構成すると、鉛直中心軸から等距離な位置からの撮影する場合のキャリブレーションに有効である。
【0024】
また、本発明の第14の態様に係る1組のカラーコード付き標識は、第1ないし第10のいずれかの態様に係るカラーコード付き標識CTからなる1組のカラーコード付き標識であって、1組のカラーコード付き標識CTの基準色パターンP2の配色は全て同一であり、1組のカラーコード付き標識CTの各カラーコードパターンP3の配色は全て異なる。
このように構成すると、1組のカラーコード付き標識CTを用いて各カラーコード付き標識CTを識別しながら、その配置された近くの光源色補正を行なうことができる。これにより、測定対象物2が大きい場合でもその各部分の画像の色彩について、光源によらない一定の色に統一する補正を可能にする1組のカラーコード付き標識を提供できる。
【発明の効果】
【0025】
本発明によれば、画像の色彩を光源によらない一定の色に統一する補正を可能にするカラーコード付き標識を提供すること、及び画像の色彩を光源によらない一定の色に統一する補正を可能にするキャリブレーションボックスを提供することができる。
【図面の簡単な説明】
【0026】
【図1】実施例1によるカラーコードターゲットの例を示す図である。
【図2】グレートーンパッチの例を示す図である。
【図3】キャリブレーションボックスの例を示す図である。
【図4】実施例1による画像色彩補正装置の例を示す図である。
【図5】レトロターゲットの重心位置検出を説明するための図である。
【図6】光源色補正のアルゴリズムのフロー例を示す図である。
【図7】カメラレスポンス関数推定のフロー例を示す図である。
【図8】レスポンス関数の例を示す図である。
【図9】逆レスポンス関数の例を示す図である。
【図10】光源色補正のアルゴリズムを説明するための図である。
【図11】標定を説明するための図である。
【図12】モデル画像を説明するための図である。
【図13】焦点距離推定の処理フロー例を示す図である。
【図14】焦点距離と内部パラメータ関数に用いられる係数の関係を示す図である。
【図15】実施例1における三次元座標演算の処理フロー例を示す図である。
【図16】実施例2によるカラーコードターゲットの例を示す図である。
【図17】実施例3によるカラーコードターゲットの例を示す図である。
【図18】実施例4によるカラーコードターゲットの例を示す図である。
【図19】実施例5によるカラーコードターゲットの例を示す図である。
【図20】実施例6によるカラーコードターゲットの例を示す図である。
【図21】実施例7によるカラーコードターゲットの例を示す図である。
【図22】実施例8によるキャリブレーションボックスの側面の例を示す図である。
【図23】実施例9によるカラーコードターゲットの例を示す図である。
【図24】実施例10によるカラーコードターゲットの例を示す図である。
【図25】実施例11によるカラーコードターゲットの例を示す図である。
【図26】実施例12によるカラーコードターゲットの例を示す図である。
【図27】実施例13によるカラーコードターゲットの例を示す図である。
【図28】実施例14によるカラーコードターゲットの例を示す図である。
【発明を実施するための形態】
【0027】
以下、図面を参照して、本発明の実施の形態について説明する。尚、各図において、互いに同一又は相当する部分には同一符号を付し、重複した説明は省略する。
【実施例1】
【0028】
実施例1では、カラーコード付き標識(カラーコードターゲット)CTが、グレースケールパターン(グレースケール領域)P5を白色領域P4に隣接して有する例を説明する。
【0029】
[カラーコードターゲット]
図1に本実施例によるコード付き標識としてのカラーコードターゲットCT1の例を示す。カラーコードの単位領域が6個で、輝度スケール領域P5が白色領域(右下隅)P4に隣接して配置されている例である。図1のカラーコードターゲットCT1は、位置検出用パターンとしてのレトロターゲット部P1、基準色パターンとしての基準色部P2、カラーコードパターンとしてのカラーコード部P3で構成されている。白色領域P4及び輝度ケール領域P5は基準色部P2の一部である。また、輝度スケール領域P5は無彩色のグレースケール領域P5となっている。本実施例では輝度スケール領域P5が白色領域P4に隣接して配置されている。これら、レトロターゲット部P1、基準色部P2(白色領域P4とグレースケール領域P5を含む)、カラーコード部P3はカラーコードターゲットCT1内の所定の位置に配置される。すなわち、基準色パターンP2(白色領域P4とグレースケール領域P5を含む)、カラーコードパターンP3は位置検出用パターンP1に対して予め定められた位置に配置される。図1の配色は、赤(R)、緑(G)、青(B)、黄(Y)、シアン(C)、マゼンタ(M)を表す。レトロターゲット部P1は黒地の中央に再帰反射材料からなる円形パターンを有している。レトロターゲット部P1に光を照射すると再帰反射材料から再帰反射するので、レトロターゲット部P1を検出し易くなる。このような再帰反射材料を有するターゲットをレトロターゲットという。この円形パターン内部を再帰反射材料に代えて白色にしても良い。白色の場合にはカラーコードターゲットCT1を製作し易く、光源色補正用の白色としても使用できる。
【0030】
レトロターゲット部P1は、位置検出用パターンとして機能し、ターゲット自体の検出用、ターゲットの位置(重心)検出用、ターゲットの傾斜検出用として使用される。3つのレトロターゲット部P1は一直線上にない3以上のパターンとして機能するので、カラーコードターゲットCT1の傾斜を検出できる。また、レトロターゲットの位置を基準にして、基準色パターンP2(白色領域P4及び輝度スケール領域P5を含む)、カラーコードパターンP3の抽出に使用される。
【0031】
基準色部P2は、色彩の基準として用いる色彩の単位領域を有する。本実施例では赤、緑、青の光三原色の色彩が使用される。すなわち、相対比較時の参照用、色ズレを補正するためのカラーキャリブレーション用として使用される。また、基準色部P2は、カメラ間の色補正に使用される。複数のカメラで同一基準色を撮影し、撮影画像間の色ずれを補正する。さらに、基準色部P2の単位領域の色彩には、光源色補正に用いる色彩が使用される。光源色補正とは、同じ色でも光源(自然光、照明等)によって異なって見えるので、画像の色彩を光源によらない一定の色に統一する補正をいう。すなわち、カラーバランスの調整及び輝度補正(濃淡補正)に使用される。また、RGB色を画面上でほぼ等しい輝度が得られるように定めておくと、RGBそれぞれの輝度をその近傍で調整してカラーバランスを取ることが容易になるので、好ましい。
【0032】
また、基準色部P2は、簡易な方法で作成されたカラーコードターゲットCT1の色彩補正用として使用できる。例えば、色管理がなされていないカラープリンター(インクジェット・レーザー・昇華型等のプリンタ)で印刷したカラーコードターゲットCTを使用する場合は、使用プリンタ等で色彩に個体差が出るが、基準色部P2とカラーコード部P3の色を相対比較し補正することで、個体差の影響を押さえることができる。
さらに、基準色部P2は光源色補正のために白色領域P4と輝度スケール領域(本実施例ではグレースケール領域)P5を有する。これらについては後述する。
【0033】
カラーコード部P3は、その各単位領域への配色の組み合わせによってコードを表現する。コードに使用するコード色の数により表現可能なコード数が変化する。例えば、コード色数がnで単位領域数が3の場合、n×n×n通りのコードを表せる。信頼度を上げるため、他の単位領域に使用されている色を重複して使用しないという条件を課した場合でも、n×(n−1)×(n−2)通りのコードを表せる。n=6の場合には、6×5×4=120通りのコードを表せる。本実施例のようにn=6、単位領域数が6の場合には、6×5×4×3×2×1=720通りのコードを表せる。そして、コード色数を増やせばコード数を増加できる。
【0034】
さらに、カラーコード部P3の単位領域の数とコード色数を等しくするという条件を課すと、全てのコード色がカラーコード部P3に使用されるため、基準色部P2との比較のみでなく、カラーコード部P3の各単位領域間で色を相対比較することにより、各単位領域の色彩を確認して識別コードを決定することができ、信頼性を上げることができる。さらに、各単位領域の面積を全て同じにする条件を追加すると、カラーコードターゲットCTを画像中から検出する際にも使用できる。これは、異なる識別コードをもつカラーコードターゲットCT間でも各色の占有する面積が同じになるため、カラーコード部P3全体からの検出光からはほぼ同様な分散値が得られるからである。また、単位領域間の境界は等間隔に繰り返され、明確な色彩差が検出されるので、このような検出光の繰り返しパターンからもカラーコードターゲットCTを画像中から検出することが可能である。
【0035】
白色領域P4は、基準色として用いるため、また、光源色補正のため白色が施される。すなわち、基準色として色ズレのキャリブレーションに使用される。また、白色は光源により敏感に変化するので、光源によらない一定の色に統一する光源色補正に好適である。また、カラーコードターゲットCT1の傾斜検出用とカラーコードターゲットCT1の四隅の内、一カ所だけレトロターゲットが配置されない箇所を白色領域P4とすることにより、これをカラーコードターゲットCT1の傾斜検出用に使用できる。この場合、傾斜検出用にはレトロターゲットと異なるパターンであれば良いので、目視でコードを確認するための番号などの文字列を印刷しても良く、また、バーコード等のコード領域を含んでも良い。本実施例では白色領域P4がレトロターゲット部P1より小型化されて右下隅に設けられ、残りにグレースケール領域P5が配置されている。白色領域P4には番号が付記されている。
【0036】
図2にグレースケール領域P5の例を示す。グレースケール領域P5には、光源色補正のため無彩色で輝度の異なる複数の諧調の色が施される。かかる無彩色で諧調の異なる複数の色を配置したパターンをグレートーンパッチという。諧調数を増やす程光源色補正の精度を向上できる。この例では、無彩色として白、黒を含む11階層の色を輝度の高い方を左にして、階調順に横一列に並べて配置している。本実施例(図1)では、白、黒を除く7階調の横長の無彩色パターンが、輝度の高い方を下にして、階調順に上下に配置されている。グレートーンパッチにより、光源色を算出し、光源色の補正を行なうことができる。また、複数のデジタルカメラで同時にグレートーンパッチを撮影した際に、異なるホワイトバランスや露出を原因とする画像間の明るさや色差を補正することができる。また、単一の撮影画像を用いてグレートーンパッチからデジタルカメラのレスポンス関数を推定することができる。
【0037】
輝度スケール領域P5には、光源色補正のため色相が同一で輝度の異なる複数の諧調の色が施される。この輝度スケール領域P5をカラーコードターゲットの一部に設ける他に、輝度スケール領域P5をシート状のカラーキャリブレーションシートとし、既存のカラーコードターゲットと共にキャリブレーションパネルやキャリブレーションボックスに貼り付けて使用することができる。また、既存のカラーコードターゲットの上又は近傍に貼り付けて使用することもできる。
【0038】
[キャリブレーションボックス]
図3にキャリブレーションボックスの例を示す。画像色彩補正装置1では、測定対象物2の周囲に円周上に配置された、場合によっては半球(上側)の球面上に配置された、ステレオカメラを用いてステレオマッチング法により測定対象物2の3次元モデリングを行なう。単カメラで場所を移動しながら撮影した画像をステレオペアとして用いても良い。しかし、複数台のデジタルカメラで撮影した画像を測定対象物モデルに重ね合わせた場合、光学的に不整合(色ずれ)の発生したテクスチャとなる。この原因は各カメラにより露出やホワイトバランスなどのパラメータが異なることにより発生するものである。カメラパラメータを統一した場合においてもデジタルカメラの個体差があり、色誤差が発生してしまう。画像色彩補正装置1が人体計測システムに使用される場合には人体の表面の色彩が光により微妙に変わることから、特に光源色補正が重要である。撮影画像における測定対象物2の表面の色彩を補正するためには、測定対象物2の表面の各部に近い位置に配置したカラーコードターゲットCT(輝度スケール領域P5を有する)を用いて行なうのが好適である。例えば、人体に近い大きさのキャリブレーションボックスCBを用意し、その表面に複数のカラーコードターゲットCTを配置し、複数のカメラの撮影画像から光源色を算出し、画像間の輝度の誤差を補正する。
【0039】
図3には、直方体の各側面に6個ずつ大きいカラーコードターゲットCTが配置され、大きいカラーコードターゲットCTの間に小さい8個のカラーコードターゲットCTが配置され、上面に小さい9個のカラーコードターゲットCTが配置されたキャリブレーションボックスCBの例を示す。大きい24個のカラーコードターゲットは第1の1組のカラーコードターゲットに属し、小さい41個のカラーコードターゲットは第2の1組のカラーコードターゲットに属する。1組のカラーコードターゲットCTにおいては、基準色パターンP2の配色は全て同一であり、各カラーコードパターンP3の配色は全て異なる。白色領域P4には白色の地に各カラーコードターゲットCTを識別する番号が付与されている。図3は、グレースケール領域P5がない例であるが、本実施例では、図1に示すようにグレースケール領域P5が白色領域P4に隣接して配置されているカラーコードターゲットCT1が配置されたキャリブレーションボックスをCB用いるものとする。また、輝度スケール領域P5をシート状にしたカラーキャリブレーションシートを図3のカラーコードターゲットCTが貼られていない隙間に配置して用いても良い。
【0040】
[画像色彩補正装置]
図4に本実施例における画像色彩補正装置1の構成例を示す。画像色彩補正装置1は、例えば、測定対象物2(キャリブレーションボックスCB等を含む)を撮影する撮影部3、撮影画像や画像処理した画像を表示したり、入出力操作を行う入出力部4、撮影画像から測定対象物2に貼り付けられたカラーコードターゲットCT1を抽出するターゲット抽出部5、撮影パラメータの演算、対象物の三次元座標の演算等の演算処理を行う演算部6、色補正(光源色補正を含む)等、撮影画像に種々の画像処理を行う画像処理部7、撮影画像、モデル画像等の画像、画像処理や演算処理に有用なデータを記憶し、必要に応じて処理中のデータを記憶する記憶部8、画像色彩補正装置1及びその各部を制御して、画像色彩補正装置1として機能させる制御部9により構成される。このうち、ターゲット抽出部5、演算部6、画像処理部7、制御部9はパーソナルコンピュータ(PC)10の機能を用いて実現でき、PC10内に構成される。
【0041】
撮影部3は、測定対象物2を撮影するためのステレオカメラ又は単カメラ等を有し、また、撮影画像を取得する撮影画像取得部31を有する。本実施例では撮影画像取得部31は少なくとも異なる2方向からの撮影画像を取得する。キャリブレーション時には、カラーコードターゲットCT1を撮影し、その撮影画像を取得する。入出力部4は、撮影画像、モデル画像や操作画面を表示する表示部41、プリンタやスピーカ等を有する出力部42、マウスやキーボード等を有する入力部43を有する。
【0042】
ターゲット抽出部5は、撮影画像取得部31で取得された撮影画像から、キャリブレーションボックスCB等に貼り付けられたカラーコードターゲットCT1の位置検出用パターンP1を検出し、位置検出用パターンP1の位置を求める位置検出部51、位置検出部51で検出されたカラーコードターゲットCT1から基準色パターンP2を抽出する基準色パターン抽出部52、位置検出部51で検出されたカラーコードターゲットCT1からカラーコードパターンP3を抽出するカラーコードパターン抽出部53を有する。基準色パターン抽出部52は、位置検出部51で検出されたカラーコードターゲットCT1から、白色領域を抽出する白色領域抽出部521と輝度スケール領域P5を抽出する輝度スケール領域抽出部522を有する。本実施例では位置検出部51は少なくとも異なる2方向から取得された撮影画像から各位置検出用パターンP1を順次検出する。
【0043】
演算部6は、キャリブレーションのために貼り付けられたカラーコードターゲットCT1やキャリブレーションボックスCBに貼り付けられたカラーコードターゲットCT1の撮影画像から位置検出部51で抽出された位置検出用パターンP1の位置に基づいてカメラの撮影パラメータを求める撮影パラメータ演算部61、撮影パラメータ演算部61で求められた撮影パラメータを用いて、測定対象物2の撮影画像から測定対象物2の位置(三次元座標)を演算して求める三次元座標演算部62、標定計算処理を行う標定部63を有する。標定部63は焦点距離fを推定する焦点距離推定部631を有する。
【0044】
画像処理部7は、基準色パターン抽出部52で抽出された各基準色パターンP2の色彩を用いてカメラ及び撮影画像の色補正を行なう色補正部71、位置検出部51で求められた位置検出用パターンP1の位置を用いて、異なる複数方向から撮影された撮影画像のつなぎ合わせを行う画像合成部72、位置検出部51で求められた位置検出用パターンP1の位置を用いて、異なる複数方向から撮影された撮影画像から、測定対象物モデルを作成するモデル形成部73、モデル形成部73で形成された測定対象物モデルに、色補正部71で補正された測定対象物2のテクスチャを貼付するテクスチャ形成部74、基準色パターン抽出部52で抽出された基準色パターンP2の各基準色の色彩とカラーコードパターン抽出部53で抽出されたカラーコードパターンP3の各コード色の色彩を比較して、カラーコードパターンP3の色彩の配置を求め、カラーコードターゲットCT1の白色領域P4に付された番号と対応付けてカラーコード記憶部83に記憶すると共に、求められたカラーコードパターンP3の色彩の配置を、記憶部8に記憶された色彩配置−コード対応表を参照してカラーコードを判別するカラーコード判別部75、撮影パラメータ演算部61で求められた撮影パラメータを用いて、画像データの補正を行なう画像データ補正部76を有する。
【0045】
記憶部8は、撮影画像を記憶する撮影画像記憶部81、基準色パターンP2の色彩データを記憶する基準色記憶部82、各カラーコードパターンP3の色彩配置データを記憶するカラーコード記憶部83、モデルデータを記憶するモデル記憶部84、内部パラメータと焦点距離fの関係を記憶する撮影パラメータ記憶部85を有する。また、各カラーコードパターンの色彩配置データとコード番号との対応関係を記録する色彩配置−コード対応表を有し、カラーコード判別部75では、この色彩配置−コード対応表を参照してカラーコードを判別する。また、使用が予定される複数種類のカラーコードターゲットCTについて、カラーコードターゲットCTの種別を示す種別コード番号を記憶する。色彩配置−コード対応表はカラーコードターゲットCTの種別毎に記憶する。
【0046】
[カラーコードターゲットの検出]
次に、カラーコードターゲットCTの検出について説明する。まず、ターゲット抽出部5の位置検出部51にて撮影画像からカラーコードターゲットCTを抽出する。抽出方法として、(1)カラーコードターゲットCT中の位置検出用パターン(レトロターゲット部)P1を探索する方法、(2)カラーコード部P3の色分散を検出する方法、あるいは(3)彩色された位置検出用パターンを用いる方法など種々の方法がある。
【0047】
(1)カラーコードターゲットCTに再帰反射材料を用いたレトロターゲットが含まれている場合は、明度差が鮮明なパターンを使用するので、カメラの絞りを絞りフラッシュ撮影することにより、レトロターゲットのみが光った画像を取得でき、この像を2値化することにより簡単にレトロターゲットを検出できる。
【0048】
図5はレトロターゲットの重心位置検出を説明するための図である。ただし、レトロターゲットでなく、黒地に白の塗装で形成した白色円形のターゲットでも処理は同様である。図5の例ではレトロターゲットは2つの同心円で形成されているが、外側が必ずしも円でなくとも良い。図5(A1)は同心円のうち小円の内側である内円部204の明度が明るく、小円と大円との間に形成された円環状の部分である外円部206の明度が暗いレトロターゲット200、図5(A2)は(A1)のレトロターゲット200の直径方向の明度分布図、図5(B1)は内円部204の明度が暗く、外円部206の明度が明るいレトロターゲット200、図5(B2)は(B1)のレトロターゲット200の直径方向の明度分布図を示している。レトロターゲットが図5(A1)のように内円部204の明度が明るい場合は、測定対象物2の撮影画像において重心位置での反射光量が多く明るい部分になっているため、画像の光量分布が図5(A2)のようになり、光量分布の閾値Toからレトロターゲットの内円部204や中心位置を求めることが可能となる。レトロターゲットを使用すると、反射光量が大きく検出し易いという利点がある。白色円形のターゲットでは製作が容易である。
【0049】
レトロターゲットの存在範囲が決定されると、例えばモーメント法によって重心位置を算出する。例えば、図5(A1)に表記されたレトロターゲット200の平面座標を(x、y)とする。そして、レトロターゲット200の明度が、しきい値To以上のx、y方向の点について、(式1)、(式2)を演算する(*は乗算演算子)。
xg={Σx*f(x、y)}/Σf(x、y) −−−−(式1)
yg={Σy*f(x、y)}/Σf(x、y) −−−−(式2)
(xg、yg):重心位置の座標、f(x、y):(x、y)座標上の明度値
なお、図5(B1)に表記されたレトロターゲット200の場合は、明度がしきい値To以下のx、y方向の点について、(式1)、(式2)を演算する。これにより、レトロターゲット200の重心位置が求まる。
【0050】
(2)通常、カラーコードターゲットCTのカラーコード部には多数のコード色が使用され、色の分散値が大であるという特徴がある。このため、分散値の大きい箇所を画像中から見出すことにより、カラーコードターゲットCTを検出できる。
(3)カラーコードターゲットCTに使用している3隅のレトロターゲットに異なる色をもたせ、それぞれのレトロターゲットが反射する色を異なるものにする。3隅のレトロターゲットに異なる色をもたせているため、1つのカラーコードターゲットに属する各レトロターゲットを判別しやすい。
【0051】
[光源色補正アルゴリズムのフロー]
図6に光源色補正(広義の光源色補正)のアルゴリズムのフロー例を示す。まず、カラーコードターゲットCT1を検出する(S010)。前述の(1)〜(3)のいずれかで検出できる。例えば、(1)のレトロターゲット部の検出又は(2)の色分散によるカラーコードターゲット検出を行なう。
【0052】
次に、カラーコードターゲットCT1のコード番号を検出する(S020)。カラーコードターゲットCT1は、カラーコード部P3の配色の差異により識別できる。よって、撮影画像におけるカラーコードターゲットCT1の寸法と傾きを補正した後に、基準色パターン抽出部52にて、基準色部P2を予め定められたコースで順次走査して各基準色(単位領域)の色彩を抽出する。カラーコードパターン抽出部53にて、カラーコード部P3を予め定められたコースで順次走査して各カラーコード色(単位領域)の色彩を抽出する。本実施例では、各単位領域への配色の組み合わせについて、他の単位領域に使用されている色を重複して使用しないという条件、及びカラーコード部P3の単位領域の数とコード色数を等しくするという条件が適用されるので、各単位領域の色彩を各基準色と比較し、また、カラーコード色間で相互に比較しながら確認して識別コードを決定できる。これにより、カラーコード判別部75は、抽出されたカラーコード部P3の色彩配置を、記憶部8に記憶された色彩配置−コード対応表を参照して、カラーコードターゲットCT1のコード番号を判別する。
【0053】
次に、輝度スケール領域P5又は/及び白色領域P4の検出を行なう(S030)。カラーコードターゲットCT1の輝度スケール領域P5又は/及び白色領域P4を自動あるいは手動で指定する。輝度スケール領域P5及び白色領域P4は、カラーコードターゲットCT1の検出に使用される3個のレトロターゲットに対して予め定められた位置関係にあることから、輝度スケール領域抽出部522又は/及び白色領域抽出部521は先に求められた3個のレトロターゲットの位置から対応する位置を自動的に走査し、検出された色彩を確認する。本実施例では、カラーコードターゲットCT1の右下隅の領域を輝度スケール領域P5として検出する。なお、マニュアルで対応する位置を指定することも可能である。
【0054】
[光源色補正の前処理]
次に、光源色補正(狭義の光源色補正)の前処理を行う。この前処理も狭義の光源色補正に含まれる。この前処理は色補正部71にて行われる。
まず、逆レスポンス関数を推定し、輝度スケール領域P5において検出された画素値(M)に逆レスポンス関数を掛ける処理を行う(S040)。一般的なデジタルカメラではシーン(撮影されるべき撮影対象及びその背景)の放射輝度(I)をデジタルカメラの画素値(M)に対応させるためのレスポンス関数が掛かっている。これは、画像をガンマ補正がされたディスプレイ上で確認した時に自然に見えるようにするためでる。ガンマ補正とは、白色領域がディスプレイ上で、有彩色やグレーが入らず白色になるように基準となる光(RGB)にモニタ特性の逆関数を掛ける補正することをいう。ところが、レスポンス関数の補正に関して、画像の輝度値が線形でないので、輝度補正する場合に単純ではない。例えば、2枚の画像の画素値の比を考えた場合、画素値(M)によって画素値の比が異なってしまう。例えば、白色パッチ(輝度スケール領域の白色部分又は白色領域P4)から輝度補正用のパラメータを推定した場合、そのパラメータを白色パッチ以外の領域(輝度スケール領域の白色以外の部分)に補正パラメータとして使うと補正を正しく行なうことができない。そのため、画素値から放射輝度を算出するには画素値にレスポンス関数の逆関数を掛けて、画素値を線形に変換する必要がある。
【0055】
図7にカメラのレスポンス関数推定のフロー例を示す。まず、輝度スケール領域抽出部522にて輝度スケール領域P5としてグレートーンパッチを検出する(S030)。この際、白色領域抽出部521で白色領域P4を、基準色パターン抽出部52で基準色パターンP2のRGB領域を併せて検出しても良い。白色領域P4と基準色パターンP2のRGB領域を併用することにより、カラーバランスの調整精度を向上できる。次に、逆レスポンス関数の推定処理(S040)として、色補正部71にて次の工程を行う。まず、グレートーンパッチの各パッチ(諧調が等しい部分を1つのパッチとする)の画素値(Mn)の抽出を行なう(S041)。次に、各パッチの画素値の平均値(Mn)を取得する。ここで、nはパッチ番号を表す(n=0〜10)。次に、多項式で画素値(Mn)を近似する(S042)。各パッチの既知の諧調値を放射輝度(In)とする。各点Pn(In,Mn)(n=1〜10)を通る関数f(M)を多項式(式3)で近似する。多項式近似は最小二乗法にて行なう。なお、白色パッチの場合には、n=Nで、輝度値=1である。
【数1】

【0056】
図8にレスポンス関数の例を示す。
図9に逆レスポンス関数の例を示す。逆レスポンス関数はレスポンス関数の逆関数である。
【0057】
次に、図6に戻り、色補正部71にて光源色を算出する(S050)。カラーコードターゲット検出工程(S010)で検出した輝度スケール領域P5がグレートーンパッチである時、又は白色領域P4が白色パッチである時は、領域内の画素値(I)(グレートーンパッチの場合は諧調毎に)の平均を光源色(Ep)(光源のパワーを分光分布で示したもの)とする(式4)(川上玲,R.T.Tan,池内克史:“光源環境の変化を利用した物体色の推定”,画像の認識・理解シンポジウム(MIRU2004)参照)。それ以外のパッチ(カラートーンパッチ)を検出した場合、それぞれの諧調毎にパッチの既知である表面色(S)(表面反射率を分光分布で示したもの)で領域内の画素値(I)を割ることで光源色(Ep)(分光分布)を算出する。そして、算出された光源色(Ep)のRGB成分の二乗和が1となるように正規化する。
【数2】
I:画素値(実測値を分光分布で示したもの)
S:表面色(表面反射率を分光分布で示したもの、白の場合は1)
Ep:推定された光源色(分光分布)
【0058】
[光源色補正]
次に、色補正部71にて光源色補正(狭義の光源色補正)を行なう(S060)。
図10は光源色補正(狭義の光源色補正)のアルゴリズムを説明するための図である。光源を不知の光源に代えて標準の光源を用いるのと等価な補正を行う。撮影した画像に含まれる物が拡散反射物体であり、相互反射や鏡面反射を含まない場合、画像の画素値(I)と表面色(S)と光源色(Ep)の関係は(式4)で表される。ここで、表面色(S)とは物体固有の色であり、光源色(Ep)の変動に対して不変な色である。つまり、光源色補正を行い、光源色(Ep)によらない物体固有の色(S)に基づく画素値を求める。
【0059】
光源色補正(狭義の光源色補正)は、撮影した画像の全画素値を算出された光源色(Ep)で割ることで行なわれる。ここで、(I〜)は補正後の画素値、(I)は補正前の画素値、(Ep)は推定された光源色である。
【数3】
I〜:補正後の画素値
I :補正前の画素値
Ep:(式4)で推定された光源色
【0060】
次に、輝度の補正を行なう(S070)。複数のカメラで同時に画像を撮影した場合について考える。それぞれのカメラで撮影した画像について、光源色の補正(S060)を行なう。この時の各画像は光源色が補正されているが、画像間では画像の明るさを表す輝度が異なる。そこで、各画像について、撮影したグレートーンパッチP5の画素値を基準として輝度を補正する。複数の画像のパッチの画素値の比(R)を計算する。そして、この画素値の比を片方の画像に掛けることにより複数の画像間における輝度の補正を行なう。
【数4】
R:明るさの比
Ep:各カメラにおける光源色
I:各カメラにおける画素値
これにより、画像間の輝度を合わせることができる。なお、ここでは、光源色補正(広義の光源色補正)アルゴリズムについてグレートーンパッチに適用する例を説明したが、カラートーンパッチについても同様に適用できる。
【0061】
[カメラパラメータの調整]
次にパラメータの調整について説明する(特開2007−147457号公報参照)。
【0062】
[相互標定]
本実施の形態において、焦点距離の推定は相互標定時に行われる。ステレオペア選択された撮影画像について、特徴点や基準点と対応点の座標を用いて、標定部63により標定計算処理を行う。標定計算処理により、撮影したカメラの位置、傾き等の外部標定要素、対応点の位置、計測精度(例えば、基準点がある場合には、バンドル調整で算出された三次元座標と基準点との残差の標準偏差、無い場合には、相互標定時の縦視差が用いられる)を求めることができる。標定計算処理は、一対の撮影画像又は一対のモデル画像の対応付けに関しては相互標定で行ない、複数または全画像間の標定に関してはバンドル調整にて行う。相互標定は標定部63で行なわれる。
【0063】
図11は、ステレオ画像におけるモデル画像座標系XYZとカメラ座標系xyzの関係の説明図である。モデル画像座標系の原点を左側の投影中心にとり、右側の投影中心を結ぶ線をX軸にとるようにする。縮尺は、基線長を単位長さにとる。このとき求めるパラメータは、左側のカメラのZ軸の回転角κ1、Y軸の回転角φ1、右側のカメラのZ軸の回転角κ2、Y軸の回転角φ2、X軸の回転角ω2の5つの回転角となる。この場合左側のカメラのX軸の回転角ω1は0なので、考慮する必要はない。
【0064】
【数5】
【0065】
このような条件にすると、(式7)の共線条件式は(式8)のようになり、この式を解けば各パラメータが求まる。
【数6】
【0066】
ここで、モデル座標系XYZとカメラ座標系xyzの間には、次に示すような座標変換の関係式(式9)、(式10)が成り立つ。
【数7】
【0067】
この式の中の、−cが画面距離で、焦点距離fと同等なものなので、この値を変動させ、最適値を選ぶことになる。なお、左右のカメラの焦点距離が異なる時は、(式9)と(式10)のcの値が異なる。
【0068】
これらの式を用いて、次の手順により、未知パラメータを求める。
(i)パラメータ(κ1、φ1、κ2、2、ω2)の初期近似値は通常0とする。
(ii)共面条件式(式8)を近似値のまわりにテーラー展開し、線形化したときの微分係数の値を式(式9)、(式10)により求め、観測方程式をたてる。
(iii)最小自乗法を適用して、近似値に対する補正量を求める。
(iv)近似値を補正する。
(v)補正された近似値を用いて(ii)〜(iv)までの操作を収束するまで繰り返す。
【0069】
仮に、標定点の配置が悪い等の場合、収束しない場合がありうる。正常に行われなかった場合は、標定結果表示でエラーを出力し、どこの画像が悪いか表示する。この場合、画像上に別の標定点があれば変更して上記計算を繰り返す。だめなら標定点の配置変更を行なう。
【0070】
このように、ステレオペア選択された各画像について、抽出された標定点で標定し、撮影したカメラの位置、傾き、対応点の位置、計測精度を求めることができる。標定計算処理は、一対の撮影画像又は一対のモデル画像の対応付けに関しては相互標定で行ない、複数または全画像間の標定に関しては後述するバンドル調整にて行う。
【0071】
〔モデル形成〕
モデル形成部73は、標定部63によって標定計算処理された外部パラメータ(撮影したカメラの位置、傾き)を用いて、モデル及びモデル画像を形成する。ここで、モデル画像とは、偏位修正画像ともいい、撮影画像の一対である左右画像の対応点を同一エピポーラライン上に再配置したものをいう。
【0072】
図12にモデル画像の例を示す。標定処理の結果を用いてモデル画像を形成すると、このように、左右画像のリファレンスポイントRFは同一エピポーラライン(水平線)EP上に再配列される。TGはターゲット(本実施例ではカラーコードターゲットCT1)である。焦点距離の推定を行なう場合には、焦点距離fを変数として離散値を用いるために、左右画像に僅かな縦視差が生じ得るが、本実施の形態ではこれらの画像もモデル画像として扱う。モデル記憶部84は、モデル形成部73で形成された測定対象物2のモデルデータ及びモデル画像を記憶する。表示部41は、ターゲット抽出部5で行う特徴点抽出、対応点探索、ステレオマッチング等の処理において、撮影画像又はモデル形成部73により形成されたモデル画像を一対の画像として表示する。
【0073】
〔焦点距離推定〕
図13に焦点距離推定の処理フロー例を示す。ここでは、ズーム式カメラにおいて予め、複数焦点の焦点位置にてキャリブレーションを行い、これらのデータより焦点距離fに対するカメラ内部パラメータ(主点位置及びレンズディストーション)の近似曲線を求め、撮影パラメータ記憶部85に記憶しておく(ステップS110:内部パラメータ記憶工程)。画像計測用に任意のズーム位置(焦点位置)にてステレオ撮影した(ステップS120、図13では第1の撮影工程と表示)場合、相互標定にて最確(縦視差が最も小さい)な焦点距離fを推定する(ステップS135:標定・焦点距離推定工程)。焦点距離fの推定は標定部63の焦点距離推定部631にて行なう。推定された焦点距離fに基づいてカメラ内部パラメータ(ディストーション及び主点位置)を近似曲線より取り出し、外部パラメータ(カメラの位置、傾き)も相互標定にて演算される(ステップS140:撮影パラメータ演算工程)。このようにして求めたカメラ内部パラメータ及び外部パラメータを用いて、撮影対象物2のモデルを形成し(ステップS155:モデル形成工程)、モデル三次元座標演算を行う(ステップS160:三次元座標演算工程)。かかる手法を焦点距離推定法と称する。
【0074】
モデル画像を形成するためには、少なくとも1回の相互標定を行う。この相互標定の際に、焦点距離推定部631において、ターゲット抽出部5で求められた特徴点、基準点及び対応点を用い、焦点距離fを変数として、一対のモデル画像間の残存縦視差を最小にするように、撮影レンズの焦点距離を推定する(ステップS135)。すなわち、焦点距離推定部631では、相互標定を行い最初のモデル画像を形成する過程で焦点距離fを推定する。このとき、焦点距離推定部631は変数としての焦点距離fを標定部63に供給し、標定部63で相互標定の計算を行って外部標定要素を算出し、モデル形成部73ではその外部標定要素を用いてモデル画像を形成し、焦点距離推定部631では、これらの焦点距離fを変化させたときのモデル画像を比較して残存縦視差が最小となる焦点距離f、すなわち、左右エピポーララインの垂直方向の差異を最小になるような焦点距離fを最確値とする。なお、相互標定を繰り返し行うことにより標定精度を向上できるので、2回目以後の相互標定で形成されたモデル画像を比較して焦点距離fを推定しても良い。
【0075】
焦点距離fを変数として比較する際に、例えば、ズーム式カメラ2の焦点距離が7.2mmから50.8mmで調整可能な場合を取り上げる。焦点距離データの測定個数を6個とすると、7.2mmが最広角となり、52.2mmが最望遠となり、中間の測定点として光学的意味での等間隔で測定をする為に、変数として、8.7mm、11.6mm、24.8mm、39.0mmが選択される。また、この焦点距離の最確値を近似的に求める手法として1段階目として変数を2mm間隔とし、2段階目として1段階目で求めた最確値の近傍で変数を0.5mm間隔とするなどにより、段階式に最確値を求め、高速化をはかることも可能である。そして、後述するように、推定した焦点距離fより、主点位置とレンズディストーションのパラメータを近似曲線より算出・取り出し、これをカメラ内部パラメータとする。また、毎回推定された焦点距離fと対応する内部パラメータを用いて相互標定を行うことにより、焦点距離fを高精度に求めることができる。
【0076】
〔バンドル調整〕
標定計算処理は、複数または全画像間の標定に関してはバンドル調整にて行う。バンドル調整は標定部63にて行なう。カメラ内部パラメータを演算処理するに際し、例えば写真測量分野で使用されている「セルフキャリブレーション付きバンドル調整法」を用いることができる。ここで、「バンドル調整」とは、被写体、レンズ、カメラの撮像面を結ぶ光束(バンドル)は同一直線上になければならないという共線条件に基づき、各画像の光束1本毎に観測方程式をたて、最小自乗法により外部標定要素(撮影したカメラの位置と傾き)とリファレンスポイントRFの座標位置を同時調整する方法である。「セルフキャリブレーション付き」とはさらに、キャリブレーション要素、即ちカメラ内部標定要素(主点位置及びレンズディストーション)を求めることができる方法である。セルフキャリブレーション付きバンドル調整法(以下単に「バンドル調整法」という)の共線条件基本式は、次の(式11)と(式12)である。
【0077】
【数8】
この(式11)と(式12)は、共線条件式(式7)を基本式とするものである。即ちバンドル調整法は、(式11)と(式12))を用いて、複数画像から最小自乗近似して、最適解を算出する手法であり、各撮影位置のカメラの外部標定要素を同時に求めることが可能となる。即ち、カメラのキャリブレーション要素を求めることが可能となる。
【0078】
ここで、内部標定要素の補正モデルとして、放射方向レンズ歪を有する場合の一例を次の(式13)に示す。
【数9】
x0,y0:画面中心(主点位置)
【0079】
〔内部パラメータ〕
ここで、カメラ内部標定要素(カメラ内部パラメータ)について説明する。
図14は、焦点距離と内部パラメータ関数に用いられる係数の関係を説明する図で、図14(A)は(式13)の係数k1、図14(B)は(式13)の係数k2、図14(C)は画像座標系xでのカメラ主点と画像中心のx軸位置ずれ係数x0、図14(D)は画像座標系yでのカメラ主点と画像中心のy軸位置ずれ係数y0を表している。ここでは、前述の説例のように、ズーム式カメラの焦点距離が7.2mmから50.8mmで調整可能な場合を取り上げる。焦点距離データの測定個数を6個とすると、7.2mmが最広角となり、52.2mmが最望遠となり、中間の測定点として光学的意味での等間隔で測定をする為に、8.7mm、11.6mm、24.8mm、39.0mmが選択される。
【0080】
(式13)の係数k1、k2は、最広角側で絶対値が最大となり、最望遠側では小さくなっている。画像座標系xでのカメラ主点と画像中心のx軸位置ずれ係数x0は、ズーム式カメラの焦点距離が11.6mmで極小値を、52.2mmで最小値4.41をとり、24.8mmで最大値4.55をとる複雑な変化をしているので、焦点距離の五次曲線で近似している。画像座標系yでのカメラ主点と画像中心のy軸位置ずれ係数y0は、ズーム式カメラの焦点距離に応じて単調に変化している。なお、チャート撮影画像はピントが合った状態で撮影されるので、ズーム式カメラ2の焦点距離fと、投影中心点O1、O2から画像座標系までの画面距離cとは、等しくなっている。
【0081】
図14の近似曲線に焦点距離fを入力すると、内部パラメータ関数に用いられる係数k1、k2、x0、y0が得られる(ステップS135)。ここで、カメラ主点のずれである座標(x0、y0)が光軸中心(主点位置)を表す。そして、内部パラメータ関数としての(式11)、(式12)、(式13)にこれらの係数を代入して、それぞれの観測点に関して観測方程式を立てる。そして、観測方程式を連立して解くと共に、最小自乗法を適用することで、最も確からしい内部パラメータが算出できる。これらの内部パラメータと焦点距離fの関係は撮影パラメータ記憶部85に入力されており、撮影パラメータ記憶部85から取得可能である。また、ズームレンズの場合には、内部パラメータは撮影画角に対応した撮影条件による影響を加味して読み出される。
また、内部パラメータの主点位置とレンズディストーションは、パスポイント(対応点)の正確な三次元座標を算出するために使用される。
【0082】
〔撮影画像の補正〕
画像データ補正部76は、これらの内部パラメータ係数k1、k2、x0、y0を用いて撮影画像又はモデル画像を補正する。モデル形成部73は、標定部63によって標定計算処理された外部パラメータ(撮影したカメラの位置、傾き)から、測定対象物2のモデル及びモデル画像を形成する(ステップS155)。この際に、画像データ補正部76で補正された撮影画像データやモデル画像データがあれば、これを用いて新たなモデル画像を形成する。これにより、レンズ歪みの影響が除去されたモデル画像を形成できる。表示部41は補正されたモデル画像を表示する。
【0083】
モデル形成部73は、カメラで撮影されたステレオ画像について相互標定で得られた外部標定要素を用いて偏位修正画像(モデル画像)を生成する機能を有し、一組のステレオ撮影された画像を偏位修正して、立体視できるように調整する。さらに、偏位修正されたステレオ画像から、いわゆる絶対標定を行って、各画素(ピクセル)の地上座標を計算する。
【0084】
画像データ補正部76は、さらに絶対標定又は相互標定で得られたステレオ画像データをオルソ画像に変換する機能を有する。オルソ画像とは、写真測量技術に基づき、カメラの傾きや比高等による歪みを補正して正射投影とした画像である。撮影画像記憶部81に格納されたステレオ画像データは、中心投影画像とよばれるものである。画像データ補正部76は、ステレオ画像データの画像を中心投影から正射投影(オルソ)画像に作成し直して、測定対象物2の詳細なモデル画像を作成する。
補正された画像データを用いて精密標定、三次元座標演算を行なうことができる。
【0085】
本実施例における焦点距離推定法(5)の他に、次のようなキャリブレーション方法(1)〜(4)も可能である。
【0086】
(1)目盛り合わせ法:焦点距離は一度目盛り中心に合わせてキャリブレーションを行い、再度その焦点距離に目検討で合わせ、前記キャリブレーションデータを使用して精度評価を実施する。
(2)デジタルカメラデータ解析ツール利用法:デジタルカメラの画像ファイルの規格として使用されるExif(イグジフ、Exchangeable Image File Formatの略語)形式の画像ファイルからデジタルカメラのデータ解析ツールにて得られた焦点距離を使用し、ディストーションと主点位置のパラメータは(3)に記すオンサイト法によりデータ取得し、キャリブレーションデータを作成する。
(3)オンサイト法:予め目盛に合わせて例えば6箇所の焦点距離にてキャリブレーションを実施し、これらのデータより焦点距離に対しディストーション及び主点位置に関する関数を作成しておく。任意のズーム位置でステレオ撮影すると仮定し、焦点距離はセルフキャリブレーション付きバンドル調整により取得する。例えば、パスポイント(対応点)10点とし、取得された焦点距離に対応するキャリブレーションデータを近似曲線より算出する。
(4)固定焦点法:焦点距離を固定してキャリブレーションを実施し、その固定した焦点位置のみにて撮影・解析を行う。
(5)焦点距離推定法:本実施例に該当する方法である。相互標定にて縦視差が最も小さくなるような焦点距離を最確値として算出し、ディストーションと主点位置のパラメータは(4)に記すオンサイト法の近似曲線より算出する。
【0087】
[三次元座標演算]
図15に実施例1における三次元座標演算の処理フロー例を示す。
まず、1組のカラーコードターゲットCT1を配置する(標識配置工程:S100)。標識配置工程(S100)では、カラーコードターゲットCT1をキャリブレーションボックスCBの表面上に配置しても良く、測定対象物2が置かれる場所の周囲に配置しても良く、測定対象物2の表面上に配置しても良い。本実施例ではキャリブレーションボックスCBの表面上に配置することとする。また、カラーコードターゲットCT1は撮影パラメータを求めるのに適した位置関係に配置することが好適である。例えば測定対象物2とほぼ同じ大きさのキャリブレーションボックスCB表面に、測定対象物2の色の変化に対応するように配置することが好ましい。すなわち、色の変化が緩やかな位置ではカラーコードターゲットCTの間隔を疎にし、色の変化が急激な位置ではカラーコードターゲットCTの間隔を密にすることが好ましい。また、カメラのレンズ歪が小さい位置ではカラーコードターゲットCTの間隔を疎にし、カメラのレンズ歪が大きい位置ではカラーコードターゲットCTの間隔を密にすることが好ましい。次に焦点距離推定のため、カメラ内部パラメータ(主点位置及びレンズディストーション)の近似曲線を求め、撮影パラメータ記憶部85に記憶する(ステップS110)。
【0088】
次に、撮影部3のカメラで複数のカラーコード付き標識CTを異なる複数方向から撮影する(第1の撮影工程:S120)。本実施例では表面に複数のカラーコードターゲットCT1が配置されたキャリブレーションボックスCBを撮影する。なお、測定対象物2とその周囲に配置したカラーコードターゲットCTを同時に撮影することも可能であり、測定対象物2の表面上にカラーコードターゲットCTを配置して測定対象物2とカラーコードターゲットCTを同時に撮影することも可能である。次に、位置検出部51にて、第1の撮影工程(S120)で撮影された撮影画像から、位置検出用パターンP1の位置を求める(位置検出工程:S121)。次に、求められた位置検出用パターンP1の位置に基づいて、基準色パターン抽出部52にて、撮影画像から基準色パターンP2を抽出し(基準色パターン抽出工程:S122)。さらに、カラーコードパターン抽出部53にて、撮影画像からカラーコードパターンP3を抽出する(カラーコードパターン抽出工程:S123)。基準色パターン抽出工程(S122)では、白色領域抽出部521及び輝度スケール領域抽出部522にて、それぞれ白色領域P4及び輝度スケール領域P5を抽出する。輝度スケール領域P5に白色パッチがある場合には、白色領域P4の抽出を省略できる。
【0089】
次に、抽出された基準色パターンP2のうち、少なくとも光源色補正に用いる色彩を用いて、色補正部71にて撮影画像の光源色補正を行う(色補正工程:S125)。基準色部P2における白色領域P4及び輝度スケール領域P5には光源色補正に用いる色彩があるので、これを用いて光源色補正を行う。輝度スケール領域P5に白色パッチがある場合には、白色領域P4の使用を省略できる。なお、基準色部P2における光三原色(RGB)パターンを光源色補正に使用しても良い。白色領域に併せて光三原色(RGB)パターンを用いるとカラーバランスの調整精度を向上できる。また、本実施例では、輝度スケール領域P5として、グレースケールパッチを使用するが、これに代えて又は併用してカラースケールパッチを使用することも可能である。次に、カラーコード判別部75にて、色補正工程(S125)で補正されたカラーコードパターンP3の色彩配列を、色彩配置−コード対応表を参照して、カラーコードターゲットCT1のコード番号を判別する(カラーコード判別工程:S130)。
【0090】
次に、標定部63にて標定を行なう。各カラーコードターゲットCT1のコード番号が判別されたので、標定がやり易くなる。標定の際に焦点距離推定部631にて焦点距離の推定を行なう(標定・焦点距離推定工程:S135)。次に、位置検出工程(S121)で抽出された位置検出用パターンP1の位置に基づいて、また、(標定・焦点距離推定工程:S135)で推定された焦点距離fを用いて、撮影パラメータ演算部61にて撮影パラメータを求める(撮影パラメータ演算工程:S140)。
【0091】
次に、キャリブレーションボックスBSを測定対象物2と置き換えて、撮影部3のカメラを用いて再度撮影する(第2の撮影工程:S150)。撮影パラメータ演算工程(S140)で求められた撮影パラメータによりカメラをキャリブレーションして再度撮影するので、精度の高い撮影画像を得られる。測定対象物2とカラーコードターゲットCTを同時に撮影した場合は、第2の撮影工程(S150)を省略できるが、撮影パラメータを用いて撮影画像を補正する。この場合でも精度の高い撮影画像を得るため、再度撮影しても良い。次に、再度撮影された撮影画像を用いて標定部63にて標定を行い、モデル形成部73にてモデル及びモデル画像を形成する(モデル形成工程:S155)。ここで、標定とモデル形成を繰り返してモデルの精度を高めても良い。次に、モデル形成工程(S155)で形成されたモデルを用いて、三次元座標演算部62にて測定対象物2の三次元座標を演算して求める(三次元座標演算工程:S160)。次に、三次元座標演算工程(S160)で求められた三次元座標を用い、色補正工程(S125)で補正された色彩を用いて、テクスチャ形成部74にてモデル各部のテクスチャを形成し、モデルにテクスチャを貼り付ける(テクスチャ形成工程:S165)。テクスチャを貼り付けたモデル画像は表示部41に表示される。これにより測定対象物2のモデルをリアルに表現できる。
【0092】
以上説明したように、本実施例によれば、画像の色彩を光源によらない一定の色に統一する補正を可能にするカラーコードターゲットを提供すること、画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正装置を提供すること、及び画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正方法を提供することができる。
【実施例2】
【0093】
図16に実施例2に係るカラーコードターゲットCT2を示す。実施例1(図1参照)と異なる点を主に説明する。図1とは、右下1/4のエリアのみが異なる。白色領域P4がレトロターゲット部P1と同じ大きさで右下隅に設けられ、右下1/4のエリアで実施例1ではカラーコード部P3として使用されていた部分にグレートーンパッチ部P5が設けられている。したがって、カラーコードの単位領域は4個となっている。グレートーンパッチ部P5は白、黒を除く8階調の横長の無彩色パターンが、輝度の高い方を下にして、階調順に上下に配置されている。基準色部P2の有彩色部分及びカラーコード部P3の配色は図1と同様である(図17と図18についても同様)。
【0094】
カラーコードターゲットCT2のその他の構成は実施例1と同様であり、画像の色彩を光源によらない一定の色に統一する補正を可能にするカラーコードターゲットを提供すること、画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正装置を提供すること、及び画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正方法を提供することができる。この効果は以下の実施例3ないし実施例7についても同様に当てはまる。
【実施例3】
【0095】
図17に、グレートーンパッチ部P5が、カラーコードターゲットCT3の中央部に配置されている例を示す。この例では、グレートーンパッチ部P5が、カラーコードターゲットCT3を左右に2分するように中央部に帯状に配置され、グレートーンパッチ部P5は白、黒を除く8階調の矩形の無彩色パターンが、輝度の高い方を下にして、階調順に上下に配置されている。グレートーンパッチ部P5が配置された中央部では、基準色パターンP2及びカラーコードパターンP3の面積がその分削除されている。なお、基準色パターンP2及びカラーコードパターンP3の面積を変えずに、カラーコードターゲットCTをグレートーンパッチ部P5の幅分横長の矩形に形成しても良い。白色領域P4がレトロターゲット部P1と同じ大きさで右下隅に設けられている。カラーコードターゲットCT3のその他の構成は実施例1と同様である。
グレートーンパッチ部P5の検出は、輝度スケール領域抽出部522にて、カラーコードターゲットCT3の上2点のレトロターゲットの中間点で、2点のレトロターゲットの重心を結ぶ線分に対して垂直に配置されたグレートーンパッチ部P5を検出する。
【実施例4】
【0096】
図18に、グレートーンパッチ部P5が、カラーコードターゲットCT4の周縁部に配置されている例を示す。この例では、グレートーンパッチ部P5が、カラーコードターゲットCT4の上側と左側の周縁部に配置され、グレートーンパッチ部P5は、上側の周縁部では黒を含み、白を除く9階調の正方形の無彩色パターンが、輝度の高い方を右にして、階調順に左右に配置され、左側の周縁部では黒を含み、白を除く9階調の正方形の無彩色パターンが、輝度の高い方を下にして、階調順に上下に配置されている。カラーコードターゲットCT4のその他の構成は実施例1と同様である。
グレートーンパッチ部P5の検出は、輝度スケール領域抽出部522にて、カラーコードターゲットCT4の上2点のレトロターゲットの重心を結ぶ線分と平行に配置され、線分の外側にあるグレートーンパッチ部P5を検出する。また、カラーコードターゲットCT4の左2点のレトロターゲットの重心を結ぶ線分と平行に配置され、線分の外側にあるグレートーンパッチ部P5を検出する。
【実施例5】
【0097】
図19に、グレートーンパッチ部P5が、カラーコードターゲットCT5の位置検出用パターンP1に配置されている例を示す。このカラーコードターゲットCT5は3枚一組となっている。カラーコードターゲットCT5の位置検出用パターンP1の円形のレトロターゲットの部分(グレーに彩色するので再帰反射材料を使用しないが、形状がレトロターゲットと同様であり、位置検出用パターンも機能も有するので、レトロターゲットと称することとする。円形の部分が白色の場合には一般的にレトロターゲットと称されている。なお、再帰反射材料を使用してグレーに配色しても良い)がグレートーンパッチを兼ねている。なお、カラーコードターゲットCT5の3つのレトロターゲットは左上、右上、左下の順番でグレーの輝度が10%ずつ減少する。一組のカラーコードターゲットCT5のレトロターゲットはそれぞれ輝度が異なり、9つのレトロターゲットは10%〜90%の輝度のグレーである。具体的には、カラーコードターゲットの輝度は、 グレートーンパッチ部P5の検出は、位置検出部51にて位置検出用パターンP1の円形のレトロターゲットを検出し、輝度スケール領域抽出部522にてその円形領域の諧調をグレートーンパターンとして検出する。
【実施例6】
【0098】
図20に、グレートーンパッチ部P5が、カラーコードターゲットCT6の位置検出用パターンP1に配置されている別の例を示す。このカラーコードターゲットCT6は2枚一組となっている。カラーコードターゲットCT6の円形のレトロターゲット及び四角形の背景部分がグレートーンパターンを兼ねている。三隅のレトロターゲットの円形の部分の輝度値は10%ずつ異なる。また、丸い領域の外の矩形領域も輝度値は10%ずつ異なる。具体的には、レトロターゲットの輝度は、「00」のカラーコードターゲットでは、左上の丸:100%、四角:50%、右上の丸:90%、四角:40%、左下の丸:80%、四角:30%、「01」のカラーコードターゲットでは、左上の丸:70%、四角:20%、右上の丸:60%、四角:10%、左下の丸:50%、四角:0%である。また、白色領域P4はカラーコードターゲットCTの右下にあり、位置検出用パターンP1と同じ大きさである。その他の構成は実施例1と同様である。
グレートーンパッチ部P5の検出は、位置検出部51にて位置検出用パターンP1の円形のレトロターゲットを検出し、輝度スケール領域抽出部522にてその円形領域及び背景の矩形領域の諧調をグレートーンパターンとして検出する。
【実施例7】
【0099】
図21に、グレートーンパッチ部P5が、カラーコードターゲットCT7の位置検出用パターンP1と同じ寸法の右下隅の領域に配置されている例を示す。このカラーコードターゲットCT7は5枚一組となっている。各カラーコードターゲットCT7を比較すると、この領域の輝度が各カラーコードターゲットCT7で異なっている。白を含み、黒を除く5階調の正方形の無彩色パターンが、カラーコードターゲットCT7の番号順に配置されている。グレートーンパッチ部P5にはコード番号が印刷されている。その他の構成は実施例1と同様である。
グレートーンパッチ部P5の検出は、位置検出部51にて位置検出用パターンP1の円形のレトロターゲットを検出し、輝度スケール領域抽出部522にて位置検出用パターンP1と同じ寸法の右下隅の領域を走査しその諧調を検出する。
【実施例8】
【0100】
図22に、本実施例におけるキャリブレーションボックスの側面を示す。グレースケール領域P5が、カラーコードターゲットCT群を左右に2分するように中央部に帯状に配置され、グレースケール領域P5は白を含み、黒を含まない8階調の矩形の無彩色パターンが、輝度の高い方を上にして、階調順に上下に配置されている。グレースケール領域の左右両側には、各4個のカラーコードターゲットCTが縦一列に配置されている。左右両側のカラーコードターゲットはそれぞれ1組のカラーコードターゲットに属する。1組のカラーコードターゲットCTにおいては、基準色パターンP2の配色は全て同一であり、各カラーコードパターンP3の配色は全て異なる。カラーコードターゲットCTの構成は、白色領域P4が位置検出用パターンと同じ大きさである点を除いて実施例1と同様である。
グレースケール領域P5の検出は、輝度スケール領域抽出部522にてカラーコードターゲットCTの間に貼付されたグレースケール領域P5を検出する。
本実施例についても、グレースケール領域P5を有するので、画像の色彩を光源によらない一定の色に統一する補正を可能にするカラーコードターゲットを提供すること、画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正装置を提供すること、及び画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正方法を提供することができる。
【実施例9】
【0101】
図23に、実施例9に係るカラーコードターゲットCT8の例を示す。本実施例ではカラーコードターゲットCT8がリング状の例を示す。グレースケール領域P5が、カラーコードターゲットCT8の位置検出用パターンP1に配置されている例を示す。
【0102】
リング状のカラーコードターゲットCT8では、位置検出用パターンから成るレトロターゲット部P1、基準色パターンから成る基準色部P2、カラーコードパターンから成るカラーコード部P3が2つの同心円に挟まれたリング状の領域に配置されている。本実施例ではリング状の領域が1環であるが、リング状の領域が2環以上でも良い。基準色パターンP3(3色)及びカラーコードパターンP3(6色)は予め定められた位置に配置されている。本実施例ではこのカラーコードターゲットCT8は2枚一組となっている。1つのカラーコードターゲットCT8は位置検出用パターンP1を6個有している(そのうち1個のレトロターゲットは白色であり、白色領域の機能を有する)が、残りの位置検出用パターンP1(1枚に5個ずつ、合計10個)のレトロターゲットをグレースケール領域P5として兼用する。具体的には、図23の左側のリング状カラーコードターゲットCT8のレトロターゲットの輝度値が10%ずつ異なり、100%〜50%であり、右側のリング状カラーコードターゲットCT8のレトロターゲットの輝度値が10%ずつ異なり、100%及び40%〜0%である。図23の配色は、赤(R)、緑(G)、青(B)、黄(Y)、シアン(C)、マゼンタ(M)を表す。リング状の領域において2つの位置検出用パターンP1に挟まれた単位領域のうちで、1つの単位領域が位置検出用パターンP1に挟まれているのが基準色部P2であり、2つの単位領域が位置検出用パターンP1に挟まれているのがカラーコード部P3である。基準色部P2には光三原色(RGB)が使用されている。
【0103】
本実施例についても、グレースケール領域P5を有するので、画像の色彩を光源によらない一定の色に統一する補正を可能にするカラーコードターゲットを提供すること、画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正装置を提供すること、及び画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正方法を提供することができる。この効果は以下の実施例10ないし実施例13についても同様に当てはまる。
【実施例10】
【0104】
図24に、実施例10に係るカラーコードターゲットCT9の例を示す。本実施例ではカラーコードターゲットCT9がリング状の別の例を示す。グレースケール領域P5が、実施例9でカラーコードターゲットCT8の基準色部P2及びカラーコード部P3のあった位置に配置されている例を示す。グレースケール領域P5は9個の単位領域に白及び黒を除く9階調の無彩色パターンが、リング状領域の位置検出用パターンP1を除いた単位領域の位置に階調順に配置されている。また、位置検出用パターンP1のレトロターゲットは全て白色である。
【実施例11】
【0105】
図25に、実施例11に係るカラーコードターゲットCT10の例を示す。本実施例ではカラーコードターゲットCT10が2環のリング状の例を示す。内側の環が基準色部P2の有彩色部分及びカラーコード部P3として機能し、外側の環がグレースケール領域P5として機能する。外側の環のグレースケール領域P5はカラーコードターゲットCT10の内側の環の基準色部P2及びカラーコード部P3に対応する位置に配置されている。グレースケール領域P5は9個の単位領域に白及び黒を除く9階調の無彩色パターンが、階調順に配置されている。1組のカラーコードターゲットCTにおいては、基準色パターンP2(グレースケール領域P5を含む)の配色は全て同一であり、各カラーコードパターンP3の配色は全て異なる。
【実施例12】
【0106】
図26に、実施例12に係るカラーコードターゲットCT11の例を示す。本実施例ではカラーコードターゲットCT11が2環のリング状の別の例を示す。外側の環が基準色部P2の有彩色部分及びカラーコード部P3として機能し、内側の環がグレースケール領域P5として機能する。内側の環のグレースケール領域P5はカラーコードターゲットCT11の外側の環の基準色部P2及びカラーコード部P3に対応する位置に配置されている。グレースケール領域P5は9個の単位領域に白及び黒を除く9階調の円形の無彩色パターンが、階調順に配置されている。1組のカラーコードターゲットCTにおいては、基準色パターンP2(グレースケール領域P5を含む)の配色は全て同一であり、各カラーコードパターンP3の配色は全て異なる。
【実施例13】
【0107】
図27に、実施例13に係るカラーコードターゲットCT12の例を示す。本実施例ではカラーコードターゲットCT12がリング状の別の例を示す。リングに囲まれた中心円の部分がグレースケール領域として機能する。このカラーコードターゲットCT12は9枚一組となっている(図27ではこのうち3枚を示す)。グレースケール領域P5は中心円に、カラーコードターゲットCT12毎に1つずつ配置されている。グレースケール領域P5は中心円に白を含み、黒を除く9階調の円形の無彩色パターンが、カラーコードターゲットCT12毎に配置されている。リングが基準色部P2の有彩色部分及びカラーコード部P3として機能する。
【実施例14】
【0108】
図28に、実施例14に係るカラーコードターゲットCT13〜CT15の例を示す。本実施例ではグレースケール領域はなく、光源色補正(広義の光源色補正)は白色領域P4及び基準色部P2の光三原色(RGB)パターンを用いて行なう例を説明する。図28(A)にはカラーコードパターンの単位領域が3、図28(B)にはカラーコードパターンの単位領域が6、図28(C)にはカラーコードパターンの単位領域が9の例を示す。図28(B)では、実施例1に比してグレースケール領域P5がなく、白色領域P4がグレースケール領域P5のあった領域まで広がっている。白色領域P4は光に対して良く変化するので、輝度は1点だけであるが、この領域を光源色補正(狭義の光源色補正)に用いることができる。また、基準色部P2のRGB色の配置は実施例1と同様である。基準色パターンP2の赤、緑、青の基準色の画素値が既知であれば、各基準色の輝度は1点ずつであるが、これらの基準色を用いて光源色補正(狭義の光源色補正)を行なうことが可能である。ここで、カラーバランスは、画像上で白色領域P4及び基準色部P2のRGB色に他の色彩が混入しないようにRGBの画素値を調整することにより行なう。カラーバランスの調整は白色領域のみ又は基準色部P2のRGBパターンのみでも可能であるが、両者を併用すると調整の精度を向上できる。また、基準色部P2のRGB色を画面上でほぼ等しい輝度が得られるように定めると、RGBそれぞれの輝度をその近傍で調整することにより、容易にカラーバランスを取ることができるので好ましい。輝度補正については、白色領域P4といずれかの基準色の輝度の2点を用いて行なうことができる。また、白色領域P5に番号が付されていない。カラーコードターゲットCT14のその他の構成は実施例1と同様である。また、図28(A)のカラーコードターゲットCT13及び図28(C)のカラーコードターゲットCT15はカラーコードパターンの単位領域が図28(B)と異なるが、その他の構成は図28(B)と同様である。よって、図28(A)及び図28(C)も白色領域P5及び基準色部P2の光三原色(RGB)パターンを用いて光源色補正(広義の光源色補正)を行なうことができる。
【0109】
以上より、本実施例についても、白色領域P4を有するので、画像の色彩を光源によらない一定の色に統一する補正を可能にするカラーコードターゲットを提供すること、画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正装置を提供すること、及び画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正方法を提供することができる。
【実施例15】
【0110】
実施例1ないし実施例4では、輝度スケールがグレースケールで1本又は2本の例を説明したが、グレースケールとカラースケールの両者を有しても良く、カラースケールとして光三原色(RGB)の各色を有しても良い。本実施例では、カラーコードターゲットCTの周縁部全体に、すなわち、上下左右に、グレートーンパッチ、赤のカラートーンパッチ、緑のカラートーンパッチ、青のカラートーンパッチと4本の輝度スケールを有する例を説明する。グレートーンパッチと光三原色(RGB)のカラートーンパッチを有するので、極めて精度の高い光源色補正を行うことができる。
【実施例16】
【0111】
以上の実施例では、カラーコードターゲットCTの基準色パターンの3つの単位領域の色彩として光三原色(RGB)を用いる例を説明したが、本実施例では光三原色(RGB)のそれぞれがいずれかの単位領域に含まれる例を説明する。本実施例では、3つの単位領域の色彩が、黄(Y)、シアン(C)、マゼンタ(M)の組み合わせとするが、他の組み合わせでも良い。カラーバランスをとるためは、光三原色(RGB)の1つ又は2つを用いても不可であり、光三原色(RGB)のそれぞれがいずれかの単位領域又は輝度スケールに含まれる必要がある。また、光三原色(RGB)が既知の値(輝度値)を持つ必要がある。例えば白色領域は光三原色(RGB)の全てを有するので光源色補正に使用できる。黄(Y)、シアン(C)、マゼンタ(M)の組み合わせとすると、赤(R)、緑(G)、青(B)はそれぞれ2つ単位領域に含まれるので光源色補正に使用できる。黄(Y)と青(B)の組み合わせでも、赤(R)、緑(G)、青(B)はそれぞれ1つ単位領域に含まれるので光源色補正に使用できる。これにより、実施例1と同様に、画像の色彩を光源によらない一定の色に統一する補正を可能にするカラーコード付き標識を提供すること、画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正装置を提供すること、及び画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正方法を提供することができる。また、実施例15の赤(R)、緑(G)、青(B)の3つのカラートーンパッチに代えて、黄(Y)、シアン(C)、マゼンタ(M)の3つのカラートーンパッチを用いてもよく、黄(Y)と青(B)の2つのカラートーンパッチを用いても良い。
【実施例17】
【0112】
以上の実施例では、カラーコードターゲットCTがキャリブレーションボックスなどに貼り付けられる例を主に説明したが、以上の実施例のカラーコードターゲットCTが測定対象物2に貼り付けられた場合や、測定対象物2の周囲に配置されて撮影された場合でも、これらのカラーコードターゲットCTを用いて、光源色補正を行なうと共に、測定対象物の三次元計測を行なうことができる。
【実施例18】
【0113】
以上の実施例では、画像色彩補正装置が画像合成部、テクスチャ形成部を有する例について説明したが、画像合成部、テクスチャ形成部が無い場合でも、光源色補正を行なうことができる。
【0114】
以上、本発明の実施の形態について説明したが、本発明は上記の実施例に限定されるものではなく、本発明の趣旨を逸脱しない範囲で実施例に種々変更を加えられることは明白である。
【0115】
例えば、以上の実施例では、カラーコード部のコード色数が主として6の場合について説明したが、任意に設定可能である。また、グレースケール領域の階調数も任意に設定可能である。また、キャリブレーションボックスの形状も直方体に限られず、円筒形でも良い。また、キャリブレーションボックスの代わりにキャリブレーションパネルを使用すると、パネル位置を移動して使用できる。また、装置構成も変更可能である。例えば、撮影部は単カメラを使用しても良く、ステレオカメラを使用しても良い。また、測定方法も変更可能である。例えば、色補正(光源色補正を含む)と撮影パラメータに係るカメラキャリブレーションの順序はどちらを先に行なっても良い。また、以上の実施例では、カラーコードターゲット内にグレースケールを配置する例を主に説明したが、カラーコードターゲットとグレースケールを切り離して配置しても良く、配置の位置も種々変更可能である。
【産業上の利用可能性】
【0116】
本発明は、撮影画像の色彩の補正に利用可能である。
【符号の説明】
【0117】
1 画像色彩補正装置
2 測定対象物
3 撮影部
4 入出力部
5 ターゲット抽出部
6 演算部
7 画像処理部
8 記憶部
9 制御部
10 パーソナルコンピュータ(PC)
31 撮影画像取得部
41 表示部
42 出力部
43 入力部
51 位置検出部
52 基準色パターン抽出部
521 白色領域抽出部
522 輝度スケール領域抽出部
53 カラーコードパターン抽出部
61 撮影パラメータ演算部
62 三次元座標演算部
63 標定部
631 焦点距離推定部
71 色補正部
72 画像合成部
73 モデル形成部
74 テクスチャ形成部
75 カラーコード判別部
76 画像データ補正部
81 撮影画像記憶部
82 基準色記憶部
83 カラーコード記憶部
84 モデル記憶部
85 撮影パラメータ記憶部
200 レトロターゲット
204 内円部
206 外円部
CB キャリブレーションボックス
CT,CTi(iは正整数) カラーコード付き標識(カラーコードターゲット)
EP エピポーラライン
Ep 光源色
f 焦点距離
I 画素値
P1 位置検出用パターン(レトロターゲット部)
P2 基準色パターン(基準色部)
P3 カラーコードパターン(カラーコード部)
P4 白色領域
P5 輝度スケールパターン(グレースケール領域、グレートーンパッチ部)
RF リファレンスポイント
S 表面色
To 明度のしきい値
TG ターゲット
(x0,y0) 光軸中心(主点位置)
【技術分野】
【0001】
本発明はカラーコード付き標識及びキャリブレーションボックスに関する。詳しくは、撮影画像間の色ずれの補正に使用可能なカラーコード付き標識及びキャリブレーションボックスに関する。
【背景技術】
【0002】
測定対象物の3次元モデルを形成するには、測定対象物を囲む円周上に配置されたデジタルカメラを用いて測定対象物を撮影し、その撮影画像をステレオマッチング法により3次元モデリングする手法等が用いられる。この場合色彩の補正は例えば発明者達が提案したカラーコードターゲットの基準色パターンを用いて行なわれていた(特許文献1、非特許文献1参照)。また、例えば発明者達が提案した撮影パラメータのキャリブレーションが行なわれていた(特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−101277号公報
【特許文献2】特開2007−147457号公報
【非特許文献】
【0004】
【非特許文献1】森山拓哉,高地伸夫,山田光晴,深谷暢之,村井俊治:“カラーコードターゲットによる自動識別方法”,写真測量とリモートセンシング,Vol.49,No.1,2010.
【発明の概要】
【発明が解決しようとする課題】
【0005】
複数台のデジタルカメラで撮影した画像を人体モデル等の光により色彩が微妙に変化する測定対象物に重ね合わせた場合、光学的に不整合(色ずれ)の発生したテクスチャとなる。これは各カメラにより露出やホワイトバランスなどのパラメータが異なることにより発生するものである。カメラパラメータを統一した場合においてもデジタルカメラの個体差があり、色誤差が発生してしまうという問題があった。特に、同じ表面色を有する測定対象物でも光源により異なった色彩に撮影され、色誤差が発生してしまうという問題があった。
【0006】
本発明は、画像の色彩を光源によらない一定の色に統一する補正を可能にするカラーコード付き標識を提供すること、及び画像の色彩を光源によらない一定の色に統一する補正を可能にするキャリブレーションボックスを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明の第1の態様に係るカラーコード付き標識CT1は、例えば図1に示すように、面内に、計測位置を示すための位置検出用パターンP1と、色彩の基準として用いる色彩及び光源色補正に用いる色彩が施された基準色パターンP2と、位置検出用パターンP1に対して所定の位置関係に配置され、標識を識別するための複数の色彩が施されたカラーコードパターンP3とを有し、光源色補正に用いる色彩が施された基準色パターンとして色相が同一で諧調の異なる複数の色を配置した輝度スケールパターンP5を有する。
【0008】
ここにおいて、光源色補正とは、同じ色でも光源によって異なって見えるので、画像の色彩を光源によらない一定の色に統一する補正をいう。光源色補正は広義の意味で、カラーバランスをとるための補正と輝度補正(濃淡補正)とからなる。狭義の光源色補正はカラーバランスをとるための補正である。カラーバランスをとるための補正は、白色パターン又は/及び光三原色パターン(RGBパターン)を用い、画像上で白色パターン又は/及び各RGBパターンに他の色が混入しないようにRGBの輝度(光量)の比率を調整するものである。色彩の基準として用いる色彩及び光源色補正に用いる色彩として白色パターン又は/及びこのカラーバランスをとるための光三原色パターン(RGBパターン)を用いることができる。白色のみ、光三原色(RGB)のみを用いることも可能であるが、両者を用いるとカラーバランスを高精度にとれるので好ましい。また、カラーバランスをとるためは、光三原色(RGB)の1つ又は2つを用いても不可であり、光三原色(RGB)のそれぞれがいずれかの単位領域又は輝度スケールに含まれる必要がある。また、光三原色(RGB)がそれぞれ既知のチャネル値(輝度値)を持つ必要がある。例えば白色領域は光三原色(RGB)の全てを有するので光源色補正に使用できる。白色を用いる場合、チャネル値(画素値I)を1とする。光三原色(RGB)を用いる場合、必ずしも同一輝度のRGBパターンを用いる必要はないが、同一輝度のRGBパターンを用いるとカラーバランスの精度が向上するので好ましい。基準色部の単位領域の色を黄(Y)、シアン(C)、マゼンタ(M)の組み合わせとすると、赤(R)、緑(G)、青(B)はそれぞれ2つ単位領域に含まれるので光源色補正に使用できる。黄(Y)と青(B)の組み合わせでも、赤(R)、緑(G)、青(B)はそれぞれ1つ単位領域に含まれるので光源色補正に使用できる。
【0009】
また、狭義の光源色補正において、逆レスポンス関数を推定するために、輝度スケールパターンP5を用いる。輝度スケールパターンの諧調数が多いほど精度の高い補正ができる。輝度スケールパターンを用いない場合は輝度1点のみのカラーバランスとなる。また、広義の光源色補正は輝度補正(濃淡補正)を含むので、輝度補正時にも輝度スケールパターンP5を用いる。輝度スケールパターンP5の色相は有彩色でも無彩色でも良い。また、色相が同一で諧調の異なる複数の色は諧調順に配置することが、逆レスポンス関数を求める処理を効率化できるので好適である。本態様における光源色補正は少なくとも狭義の光源色補正を含むものとする。特許請求の範囲及び明細書においても特にことわらない限りこの意味で用いられる。また、「光源によらない一定の色に統一する」とは、全色彩を完全に統一する補正に限られず、高精度の補正、低精度の補正を含むものとする。具体的には無彩色又は有彩色のいずれかの色彩で例えば(式5)の補正が行われていれば良い。この場合、輝度は(式3)に限られず他の関数で導かれても良い。
【0010】
また、「所定の位置関係に配置され」とは、位置検出用パターンP1に対してカラーコードパターンP3は予め定められた位置に配置されることを意味する。これにより、位置検出用パターンP1との位置関係からカラーコードパターンP3を抽出し、コード番号が判別可能になる。なお、1組のカラーコード付き標識においては、基準色パターンP2の配色(輝度スケールパターンP5の配色を含む)は全て同一であり、カラーコードパターンP3の配色は全て異なるものとなる。なお、カラーコード付き標識(カラーコードターゲット)について包括的に示すときはCT、個別に示す時はCTi(iは正整数)と表示することとする。
本態様のように構成すると、輝度スケールパターンP5を用いて光源色補正を行なうことにより、画像の色彩を光源によらない一定の色に統一する補正を可能にするカラーコード付き標識CTを提供できる。
【0011】
また、本発明の第2の態様に係るカラーコード付き標識CT1は、第1の態様において、例えば図1に示すように、輝度スケールパターンP5の色相が無彩色である。
ここにおいて、無彩色の輝度スケールパターンをグレースケールパターン又はグレートーンパッチ、有彩色の輝度スケールパターンをカラースケールパターン又はカラートーンパッチという。輝度スケールパターンP5が無彩色のときは、グレースケール領域又はグレートーンパッチ部ともいう。輝度スケールパターンは、白又は/及び黒を含んでも良く、含まなくても良い。含まない場合には、いずれかのパターン(例えば位置検出用パターンや次に述べる白色領域)に白又は/及び黒が含まれることが、輝度の最大値と最小値が明確になるので好ましい。また、グレースケールパターンはカラーバランスを調整するために使用される。すなわち、画像で、RGBが混入せず、無彩色が再現されるように、RGBの輝度が調整される。これをグレートーンパッチの各輝度において調整する。カラートーンパッチの場合には他のカラーが混入しているか否かを調べ、混入しないように調整する。
本態様のように構成すると、グレースケールパターンを用いて、広い輝度範囲にわたって精度の良い光源色補正ができる。
【0012】
また、本発明の第3の態様に係るカラーコード付き標識CT1は、第1の態様又は第2の態様において、例えば図1に示すように、基準色パターンP2は、輝度スケールパターンP5の外に光源色補正に用いる色彩として白色が施された白色領域P4を有する。
このように構成すると、白色領域P4を用いて、小面積で効率の良い光源色補正ができる。
【0013】
また、本発明の第4の態様に係るカラーコード付き標識CT3は、第2の態様又は第3の態様において、例えば図17に示すように、輝度スケールパターンP5がカラーコード付き標識CT3の中央部に配置されている。
このように構成すると、カラーコード付き標識CT3が貼り付けられた領域の中心近傍のデータを用いて輝度補正をするので、精度の良い色補正ができる。
【0014】
また、本発明の第5の態様に係るカラーコード付き標識CT4は、第2の態様又は第3の態様において、例えば図18に示すように、輝度スケールパターンP5がカラーコード付き標識CT4の周縁部に配置されている。
このように構成すると、既存のカラーコード付き標識の機能を損なうことなくそのまま利用できる。
【0015】
また、本発明の第6の態様に係るカラーコード付き標識CT5は、第1ないし第3のいずれかの態様において、例えば図19に示すように、位置検出用パターンP1を複数備え、複数の位置検出用パターンP1の全て又は一部が輝度スケールパターンP5を兼用する。
ここにおいて、一部とは例えば位置検出用パターン数が3の時に、そのうち1つ又は2つを輝度スケールパターンと兼用するなどである。
本態様のように構成すると、光源色補正のために面積を増加することなく、光源色補正を可能にする。
【0016】
また、本発明の第7の態様に係るカラーコード付き標識CT1は、第3の態様において、例えば図1に示すように、白色領域P4は目視用の識別記号が付された目視用コードを有し、輝度スケールパターンP5は白色領域P4に隣接して配置されている。
ここにおいて、図1の例では輝度スケールパターンは白色領域に隣接して配置されているといえる。また、輝度スケールパターンが白色領域分に囲まれている場合及び白色領域が輝度スケールパターンに囲まれている場合も輝度スケールパターンは白色領域に隣接して配置されているといえる。
本態様のように構成すると、目視用コードを用いて、カラーコード付き標識CT1を目視で識別できる。撮影範囲を調整するのに便宜である。
【0017】
また、本発明の第8の態様に係るカラーコード付き標識CT1は、第1の態様ないしは第7の態様において、例えば図1に示すように、カラーコード付き標識CT1は、矩形に形成され、位置検出用パターンP1を3個備え、3個の位置検出用パターンP3がカラーコード付き標識CT1の3隅に配置されている。
このように構成すると、1隅に位置検出用パターンP1がないので、これを利用してカラーコード付き標識CT1の傾きを求められ、カラーコードパターンの配置を容易に特定でき、コード番号を容易に求められる。
【0018】
また、本発明の第9の態様に係るカラーコード付き標識CT8は、第1の態様ないしは第7の態様において、例えば図23に示すように、円形又は円環状に形成され、複数の位置検出用パターンP1が同心円状に配置されている。
このように構成すると、円形の場合には矩形に比してリング状にスキャンすれば良いのでスキャンルートが単純である。さらに、円環状の場合には例えば突起や窪みのある対象物の測定に使用できる。また、円形の場合には円環状に比して製作が容易である。
【0019】
また、本発明の第10の態様に係るカラーコード付き標識CT13〜CT15は、面内に、計測位置を示すための位置検出用パターンP1と、色彩の基準として用いる色彩及び光源色補正に用いる色彩が施された基準色パターンP2と、位置検出用パターンP1に対して所定の位置関係に配置され、標識を識別するための複数の色彩が施されたカラーコードパターンP3とを有し、光源色補正に用いる色彩が施された基準色パターンP2として輝度がほぼ等しくなるような光三原色を用いる。
【0020】
ここにおいて、色彩の基準として用いる色彩及び光源色補正に用いる色彩としてカラーバランスをとるための光三原色(RGB)を用いることができる。ただし、各RGBパターンはそれぞれ既知のチャネル値(画素値I)を持つ必要がある。必ずしも同一輝度のRGBパターンを用いる必要はないが、同一輝度のRGBパターンを用いるとカラーバランスの精度が向上するので好ましい。また、ほぼ等しいの輝度の範囲は例えば±10%以内とする。
本態様のように構成すると、従来のカラーコードターゲットの色彩を調整することにより、光源色の補正が可能になる。光三原色(RGB)を画面上で輝度がほぼ等しくするので、RGBそれぞれの輝度をその近傍で調整することにより、容易にカラーバランスを取ることができる。また、光三原色が施された基準色パターンP2の単位領域を用いて、小面積で効率の良い光源色補正ができる。
【0021】
また、本発明の第11の態様に係るキャリブレーションパネルは、第1ないし第10のいずれかの態様に係るカラーコード付き標識CTが、同一面内に複数配置されている。
このように構成すると、1つのキャリブレーションパネルを用いて異なる複数の測定対象物位置に対して、パネルを移動しながらキャリブレーションができる。
【0022】
また、本発明の第12の態様に係るキャリブレーションボックスCBは、第1ないし第10のいずれかの態様に係るカラーコード付き標識CTが、例えば図3に示すように、多面体の各面に単数又は複数配置されている。
ここにおいて、多面体は3面体以上である。
本態様のように構成すると、測定対象物を周囲の複数の位置から撮影する場合のキャリブレーションに有効である。
【0023】
また、本発明の第13の態様に係るキャリブレーションボックスは、第1ないし第10のいずれかの態様に係るカラーコード付き標識CTが、円筒の面に配置されている。
このように構成すると、鉛直中心軸から等距離な位置からの撮影する場合のキャリブレーションに有効である。
【0024】
また、本発明の第14の態様に係る1組のカラーコード付き標識は、第1ないし第10のいずれかの態様に係るカラーコード付き標識CTからなる1組のカラーコード付き標識であって、1組のカラーコード付き標識CTの基準色パターンP2の配色は全て同一であり、1組のカラーコード付き標識CTの各カラーコードパターンP3の配色は全て異なる。
このように構成すると、1組のカラーコード付き標識CTを用いて各カラーコード付き標識CTを識別しながら、その配置された近くの光源色補正を行なうことができる。これにより、測定対象物2が大きい場合でもその各部分の画像の色彩について、光源によらない一定の色に統一する補正を可能にする1組のカラーコード付き標識を提供できる。
【発明の効果】
【0025】
本発明によれば、画像の色彩を光源によらない一定の色に統一する補正を可能にするカラーコード付き標識を提供すること、及び画像の色彩を光源によらない一定の色に統一する補正を可能にするキャリブレーションボックスを提供することができる。
【図面の簡単な説明】
【0026】
【図1】実施例1によるカラーコードターゲットの例を示す図である。
【図2】グレートーンパッチの例を示す図である。
【図3】キャリブレーションボックスの例を示す図である。
【図4】実施例1による画像色彩補正装置の例を示す図である。
【図5】レトロターゲットの重心位置検出を説明するための図である。
【図6】光源色補正のアルゴリズムのフロー例を示す図である。
【図7】カメラレスポンス関数推定のフロー例を示す図である。
【図8】レスポンス関数の例を示す図である。
【図9】逆レスポンス関数の例を示す図である。
【図10】光源色補正のアルゴリズムを説明するための図である。
【図11】標定を説明するための図である。
【図12】モデル画像を説明するための図である。
【図13】焦点距離推定の処理フロー例を示す図である。
【図14】焦点距離と内部パラメータ関数に用いられる係数の関係を示す図である。
【図15】実施例1における三次元座標演算の処理フロー例を示す図である。
【図16】実施例2によるカラーコードターゲットの例を示す図である。
【図17】実施例3によるカラーコードターゲットの例を示す図である。
【図18】実施例4によるカラーコードターゲットの例を示す図である。
【図19】実施例5によるカラーコードターゲットの例を示す図である。
【図20】実施例6によるカラーコードターゲットの例を示す図である。
【図21】実施例7によるカラーコードターゲットの例を示す図である。
【図22】実施例8によるキャリブレーションボックスの側面の例を示す図である。
【図23】実施例9によるカラーコードターゲットの例を示す図である。
【図24】実施例10によるカラーコードターゲットの例を示す図である。
【図25】実施例11によるカラーコードターゲットの例を示す図である。
【図26】実施例12によるカラーコードターゲットの例を示す図である。
【図27】実施例13によるカラーコードターゲットの例を示す図である。
【図28】実施例14によるカラーコードターゲットの例を示す図である。
【発明を実施するための形態】
【0027】
以下、図面を参照して、本発明の実施の形態について説明する。尚、各図において、互いに同一又は相当する部分には同一符号を付し、重複した説明は省略する。
【実施例1】
【0028】
実施例1では、カラーコード付き標識(カラーコードターゲット)CTが、グレースケールパターン(グレースケール領域)P5を白色領域P4に隣接して有する例を説明する。
【0029】
[カラーコードターゲット]
図1に本実施例によるコード付き標識としてのカラーコードターゲットCT1の例を示す。カラーコードの単位領域が6個で、輝度スケール領域P5が白色領域(右下隅)P4に隣接して配置されている例である。図1のカラーコードターゲットCT1は、位置検出用パターンとしてのレトロターゲット部P1、基準色パターンとしての基準色部P2、カラーコードパターンとしてのカラーコード部P3で構成されている。白色領域P4及び輝度ケール領域P5は基準色部P2の一部である。また、輝度スケール領域P5は無彩色のグレースケール領域P5となっている。本実施例では輝度スケール領域P5が白色領域P4に隣接して配置されている。これら、レトロターゲット部P1、基準色部P2(白色領域P4とグレースケール領域P5を含む)、カラーコード部P3はカラーコードターゲットCT1内の所定の位置に配置される。すなわち、基準色パターンP2(白色領域P4とグレースケール領域P5を含む)、カラーコードパターンP3は位置検出用パターンP1に対して予め定められた位置に配置される。図1の配色は、赤(R)、緑(G)、青(B)、黄(Y)、シアン(C)、マゼンタ(M)を表す。レトロターゲット部P1は黒地の中央に再帰反射材料からなる円形パターンを有している。レトロターゲット部P1に光を照射すると再帰反射材料から再帰反射するので、レトロターゲット部P1を検出し易くなる。このような再帰反射材料を有するターゲットをレトロターゲットという。この円形パターン内部を再帰反射材料に代えて白色にしても良い。白色の場合にはカラーコードターゲットCT1を製作し易く、光源色補正用の白色としても使用できる。
【0030】
レトロターゲット部P1は、位置検出用パターンとして機能し、ターゲット自体の検出用、ターゲットの位置(重心)検出用、ターゲットの傾斜検出用として使用される。3つのレトロターゲット部P1は一直線上にない3以上のパターンとして機能するので、カラーコードターゲットCT1の傾斜を検出できる。また、レトロターゲットの位置を基準にして、基準色パターンP2(白色領域P4及び輝度スケール領域P5を含む)、カラーコードパターンP3の抽出に使用される。
【0031】
基準色部P2は、色彩の基準として用いる色彩の単位領域を有する。本実施例では赤、緑、青の光三原色の色彩が使用される。すなわち、相対比較時の参照用、色ズレを補正するためのカラーキャリブレーション用として使用される。また、基準色部P2は、カメラ間の色補正に使用される。複数のカメラで同一基準色を撮影し、撮影画像間の色ずれを補正する。さらに、基準色部P2の単位領域の色彩には、光源色補正に用いる色彩が使用される。光源色補正とは、同じ色でも光源(自然光、照明等)によって異なって見えるので、画像の色彩を光源によらない一定の色に統一する補正をいう。すなわち、カラーバランスの調整及び輝度補正(濃淡補正)に使用される。また、RGB色を画面上でほぼ等しい輝度が得られるように定めておくと、RGBそれぞれの輝度をその近傍で調整してカラーバランスを取ることが容易になるので、好ましい。
【0032】
また、基準色部P2は、簡易な方法で作成されたカラーコードターゲットCT1の色彩補正用として使用できる。例えば、色管理がなされていないカラープリンター(インクジェット・レーザー・昇華型等のプリンタ)で印刷したカラーコードターゲットCTを使用する場合は、使用プリンタ等で色彩に個体差が出るが、基準色部P2とカラーコード部P3の色を相対比較し補正することで、個体差の影響を押さえることができる。
さらに、基準色部P2は光源色補正のために白色領域P4と輝度スケール領域(本実施例ではグレースケール領域)P5を有する。これらについては後述する。
【0033】
カラーコード部P3は、その各単位領域への配色の組み合わせによってコードを表現する。コードに使用するコード色の数により表現可能なコード数が変化する。例えば、コード色数がnで単位領域数が3の場合、n×n×n通りのコードを表せる。信頼度を上げるため、他の単位領域に使用されている色を重複して使用しないという条件を課した場合でも、n×(n−1)×(n−2)通りのコードを表せる。n=6の場合には、6×5×4=120通りのコードを表せる。本実施例のようにn=6、単位領域数が6の場合には、6×5×4×3×2×1=720通りのコードを表せる。そして、コード色数を増やせばコード数を増加できる。
【0034】
さらに、カラーコード部P3の単位領域の数とコード色数を等しくするという条件を課すと、全てのコード色がカラーコード部P3に使用されるため、基準色部P2との比較のみでなく、カラーコード部P3の各単位領域間で色を相対比較することにより、各単位領域の色彩を確認して識別コードを決定することができ、信頼性を上げることができる。さらに、各単位領域の面積を全て同じにする条件を追加すると、カラーコードターゲットCTを画像中から検出する際にも使用できる。これは、異なる識別コードをもつカラーコードターゲットCT間でも各色の占有する面積が同じになるため、カラーコード部P3全体からの検出光からはほぼ同様な分散値が得られるからである。また、単位領域間の境界は等間隔に繰り返され、明確な色彩差が検出されるので、このような検出光の繰り返しパターンからもカラーコードターゲットCTを画像中から検出することが可能である。
【0035】
白色領域P4は、基準色として用いるため、また、光源色補正のため白色が施される。すなわち、基準色として色ズレのキャリブレーションに使用される。また、白色は光源により敏感に変化するので、光源によらない一定の色に統一する光源色補正に好適である。また、カラーコードターゲットCT1の傾斜検出用とカラーコードターゲットCT1の四隅の内、一カ所だけレトロターゲットが配置されない箇所を白色領域P4とすることにより、これをカラーコードターゲットCT1の傾斜検出用に使用できる。この場合、傾斜検出用にはレトロターゲットと異なるパターンであれば良いので、目視でコードを確認するための番号などの文字列を印刷しても良く、また、バーコード等のコード領域を含んでも良い。本実施例では白色領域P4がレトロターゲット部P1より小型化されて右下隅に設けられ、残りにグレースケール領域P5が配置されている。白色領域P4には番号が付記されている。
【0036】
図2にグレースケール領域P5の例を示す。グレースケール領域P5には、光源色補正のため無彩色で輝度の異なる複数の諧調の色が施される。かかる無彩色で諧調の異なる複数の色を配置したパターンをグレートーンパッチという。諧調数を増やす程光源色補正の精度を向上できる。この例では、無彩色として白、黒を含む11階層の色を輝度の高い方を左にして、階調順に横一列に並べて配置している。本実施例(図1)では、白、黒を除く7階調の横長の無彩色パターンが、輝度の高い方を下にして、階調順に上下に配置されている。グレートーンパッチにより、光源色を算出し、光源色の補正を行なうことができる。また、複数のデジタルカメラで同時にグレートーンパッチを撮影した際に、異なるホワイトバランスや露出を原因とする画像間の明るさや色差を補正することができる。また、単一の撮影画像を用いてグレートーンパッチからデジタルカメラのレスポンス関数を推定することができる。
【0037】
輝度スケール領域P5には、光源色補正のため色相が同一で輝度の異なる複数の諧調の色が施される。この輝度スケール領域P5をカラーコードターゲットの一部に設ける他に、輝度スケール領域P5をシート状のカラーキャリブレーションシートとし、既存のカラーコードターゲットと共にキャリブレーションパネルやキャリブレーションボックスに貼り付けて使用することができる。また、既存のカラーコードターゲットの上又は近傍に貼り付けて使用することもできる。
【0038】
[キャリブレーションボックス]
図3にキャリブレーションボックスの例を示す。画像色彩補正装置1では、測定対象物2の周囲に円周上に配置された、場合によっては半球(上側)の球面上に配置された、ステレオカメラを用いてステレオマッチング法により測定対象物2の3次元モデリングを行なう。単カメラで場所を移動しながら撮影した画像をステレオペアとして用いても良い。しかし、複数台のデジタルカメラで撮影した画像を測定対象物モデルに重ね合わせた場合、光学的に不整合(色ずれ)の発生したテクスチャとなる。この原因は各カメラにより露出やホワイトバランスなどのパラメータが異なることにより発生するものである。カメラパラメータを統一した場合においてもデジタルカメラの個体差があり、色誤差が発生してしまう。画像色彩補正装置1が人体計測システムに使用される場合には人体の表面の色彩が光により微妙に変わることから、特に光源色補正が重要である。撮影画像における測定対象物2の表面の色彩を補正するためには、測定対象物2の表面の各部に近い位置に配置したカラーコードターゲットCT(輝度スケール領域P5を有する)を用いて行なうのが好適である。例えば、人体に近い大きさのキャリブレーションボックスCBを用意し、その表面に複数のカラーコードターゲットCTを配置し、複数のカメラの撮影画像から光源色を算出し、画像間の輝度の誤差を補正する。
【0039】
図3には、直方体の各側面に6個ずつ大きいカラーコードターゲットCTが配置され、大きいカラーコードターゲットCTの間に小さい8個のカラーコードターゲットCTが配置され、上面に小さい9個のカラーコードターゲットCTが配置されたキャリブレーションボックスCBの例を示す。大きい24個のカラーコードターゲットは第1の1組のカラーコードターゲットに属し、小さい41個のカラーコードターゲットは第2の1組のカラーコードターゲットに属する。1組のカラーコードターゲットCTにおいては、基準色パターンP2の配色は全て同一であり、各カラーコードパターンP3の配色は全て異なる。白色領域P4には白色の地に各カラーコードターゲットCTを識別する番号が付与されている。図3は、グレースケール領域P5がない例であるが、本実施例では、図1に示すようにグレースケール領域P5が白色領域P4に隣接して配置されているカラーコードターゲットCT1が配置されたキャリブレーションボックスをCB用いるものとする。また、輝度スケール領域P5をシート状にしたカラーキャリブレーションシートを図3のカラーコードターゲットCTが貼られていない隙間に配置して用いても良い。
【0040】
[画像色彩補正装置]
図4に本実施例における画像色彩補正装置1の構成例を示す。画像色彩補正装置1は、例えば、測定対象物2(キャリブレーションボックスCB等を含む)を撮影する撮影部3、撮影画像や画像処理した画像を表示したり、入出力操作を行う入出力部4、撮影画像から測定対象物2に貼り付けられたカラーコードターゲットCT1を抽出するターゲット抽出部5、撮影パラメータの演算、対象物の三次元座標の演算等の演算処理を行う演算部6、色補正(光源色補正を含む)等、撮影画像に種々の画像処理を行う画像処理部7、撮影画像、モデル画像等の画像、画像処理や演算処理に有用なデータを記憶し、必要に応じて処理中のデータを記憶する記憶部8、画像色彩補正装置1及びその各部を制御して、画像色彩補正装置1として機能させる制御部9により構成される。このうち、ターゲット抽出部5、演算部6、画像処理部7、制御部9はパーソナルコンピュータ(PC)10の機能を用いて実現でき、PC10内に構成される。
【0041】
撮影部3は、測定対象物2を撮影するためのステレオカメラ又は単カメラ等を有し、また、撮影画像を取得する撮影画像取得部31を有する。本実施例では撮影画像取得部31は少なくとも異なる2方向からの撮影画像を取得する。キャリブレーション時には、カラーコードターゲットCT1を撮影し、その撮影画像を取得する。入出力部4は、撮影画像、モデル画像や操作画面を表示する表示部41、プリンタやスピーカ等を有する出力部42、マウスやキーボード等を有する入力部43を有する。
【0042】
ターゲット抽出部5は、撮影画像取得部31で取得された撮影画像から、キャリブレーションボックスCB等に貼り付けられたカラーコードターゲットCT1の位置検出用パターンP1を検出し、位置検出用パターンP1の位置を求める位置検出部51、位置検出部51で検出されたカラーコードターゲットCT1から基準色パターンP2を抽出する基準色パターン抽出部52、位置検出部51で検出されたカラーコードターゲットCT1からカラーコードパターンP3を抽出するカラーコードパターン抽出部53を有する。基準色パターン抽出部52は、位置検出部51で検出されたカラーコードターゲットCT1から、白色領域を抽出する白色領域抽出部521と輝度スケール領域P5を抽出する輝度スケール領域抽出部522を有する。本実施例では位置検出部51は少なくとも異なる2方向から取得された撮影画像から各位置検出用パターンP1を順次検出する。
【0043】
演算部6は、キャリブレーションのために貼り付けられたカラーコードターゲットCT1やキャリブレーションボックスCBに貼り付けられたカラーコードターゲットCT1の撮影画像から位置検出部51で抽出された位置検出用パターンP1の位置に基づいてカメラの撮影パラメータを求める撮影パラメータ演算部61、撮影パラメータ演算部61で求められた撮影パラメータを用いて、測定対象物2の撮影画像から測定対象物2の位置(三次元座標)を演算して求める三次元座標演算部62、標定計算処理を行う標定部63を有する。標定部63は焦点距離fを推定する焦点距離推定部631を有する。
【0044】
画像処理部7は、基準色パターン抽出部52で抽出された各基準色パターンP2の色彩を用いてカメラ及び撮影画像の色補正を行なう色補正部71、位置検出部51で求められた位置検出用パターンP1の位置を用いて、異なる複数方向から撮影された撮影画像のつなぎ合わせを行う画像合成部72、位置検出部51で求められた位置検出用パターンP1の位置を用いて、異なる複数方向から撮影された撮影画像から、測定対象物モデルを作成するモデル形成部73、モデル形成部73で形成された測定対象物モデルに、色補正部71で補正された測定対象物2のテクスチャを貼付するテクスチャ形成部74、基準色パターン抽出部52で抽出された基準色パターンP2の各基準色の色彩とカラーコードパターン抽出部53で抽出されたカラーコードパターンP3の各コード色の色彩を比較して、カラーコードパターンP3の色彩の配置を求め、カラーコードターゲットCT1の白色領域P4に付された番号と対応付けてカラーコード記憶部83に記憶すると共に、求められたカラーコードパターンP3の色彩の配置を、記憶部8に記憶された色彩配置−コード対応表を参照してカラーコードを判別するカラーコード判別部75、撮影パラメータ演算部61で求められた撮影パラメータを用いて、画像データの補正を行なう画像データ補正部76を有する。
【0045】
記憶部8は、撮影画像を記憶する撮影画像記憶部81、基準色パターンP2の色彩データを記憶する基準色記憶部82、各カラーコードパターンP3の色彩配置データを記憶するカラーコード記憶部83、モデルデータを記憶するモデル記憶部84、内部パラメータと焦点距離fの関係を記憶する撮影パラメータ記憶部85を有する。また、各カラーコードパターンの色彩配置データとコード番号との対応関係を記録する色彩配置−コード対応表を有し、カラーコード判別部75では、この色彩配置−コード対応表を参照してカラーコードを判別する。また、使用が予定される複数種類のカラーコードターゲットCTについて、カラーコードターゲットCTの種別を示す種別コード番号を記憶する。色彩配置−コード対応表はカラーコードターゲットCTの種別毎に記憶する。
【0046】
[カラーコードターゲットの検出]
次に、カラーコードターゲットCTの検出について説明する。まず、ターゲット抽出部5の位置検出部51にて撮影画像からカラーコードターゲットCTを抽出する。抽出方法として、(1)カラーコードターゲットCT中の位置検出用パターン(レトロターゲット部)P1を探索する方法、(2)カラーコード部P3の色分散を検出する方法、あるいは(3)彩色された位置検出用パターンを用いる方法など種々の方法がある。
【0047】
(1)カラーコードターゲットCTに再帰反射材料を用いたレトロターゲットが含まれている場合は、明度差が鮮明なパターンを使用するので、カメラの絞りを絞りフラッシュ撮影することにより、レトロターゲットのみが光った画像を取得でき、この像を2値化することにより簡単にレトロターゲットを検出できる。
【0048】
図5はレトロターゲットの重心位置検出を説明するための図である。ただし、レトロターゲットでなく、黒地に白の塗装で形成した白色円形のターゲットでも処理は同様である。図5の例ではレトロターゲットは2つの同心円で形成されているが、外側が必ずしも円でなくとも良い。図5(A1)は同心円のうち小円の内側である内円部204の明度が明るく、小円と大円との間に形成された円環状の部分である外円部206の明度が暗いレトロターゲット200、図5(A2)は(A1)のレトロターゲット200の直径方向の明度分布図、図5(B1)は内円部204の明度が暗く、外円部206の明度が明るいレトロターゲット200、図5(B2)は(B1)のレトロターゲット200の直径方向の明度分布図を示している。レトロターゲットが図5(A1)のように内円部204の明度が明るい場合は、測定対象物2の撮影画像において重心位置での反射光量が多く明るい部分になっているため、画像の光量分布が図5(A2)のようになり、光量分布の閾値Toからレトロターゲットの内円部204や中心位置を求めることが可能となる。レトロターゲットを使用すると、反射光量が大きく検出し易いという利点がある。白色円形のターゲットでは製作が容易である。
【0049】
レトロターゲットの存在範囲が決定されると、例えばモーメント法によって重心位置を算出する。例えば、図5(A1)に表記されたレトロターゲット200の平面座標を(x、y)とする。そして、レトロターゲット200の明度が、しきい値To以上のx、y方向の点について、(式1)、(式2)を演算する(*は乗算演算子)。
xg={Σx*f(x、y)}/Σf(x、y) −−−−(式1)
yg={Σy*f(x、y)}/Σf(x、y) −−−−(式2)
(xg、yg):重心位置の座標、f(x、y):(x、y)座標上の明度値
なお、図5(B1)に表記されたレトロターゲット200の場合は、明度がしきい値To以下のx、y方向の点について、(式1)、(式2)を演算する。これにより、レトロターゲット200の重心位置が求まる。
【0050】
(2)通常、カラーコードターゲットCTのカラーコード部には多数のコード色が使用され、色の分散値が大であるという特徴がある。このため、分散値の大きい箇所を画像中から見出すことにより、カラーコードターゲットCTを検出できる。
(3)カラーコードターゲットCTに使用している3隅のレトロターゲットに異なる色をもたせ、それぞれのレトロターゲットが反射する色を異なるものにする。3隅のレトロターゲットに異なる色をもたせているため、1つのカラーコードターゲットに属する各レトロターゲットを判別しやすい。
【0051】
[光源色補正アルゴリズムのフロー]
図6に光源色補正(広義の光源色補正)のアルゴリズムのフロー例を示す。まず、カラーコードターゲットCT1を検出する(S010)。前述の(1)〜(3)のいずれかで検出できる。例えば、(1)のレトロターゲット部の検出又は(2)の色分散によるカラーコードターゲット検出を行なう。
【0052】
次に、カラーコードターゲットCT1のコード番号を検出する(S020)。カラーコードターゲットCT1は、カラーコード部P3の配色の差異により識別できる。よって、撮影画像におけるカラーコードターゲットCT1の寸法と傾きを補正した後に、基準色パターン抽出部52にて、基準色部P2を予め定められたコースで順次走査して各基準色(単位領域)の色彩を抽出する。カラーコードパターン抽出部53にて、カラーコード部P3を予め定められたコースで順次走査して各カラーコード色(単位領域)の色彩を抽出する。本実施例では、各単位領域への配色の組み合わせについて、他の単位領域に使用されている色を重複して使用しないという条件、及びカラーコード部P3の単位領域の数とコード色数を等しくするという条件が適用されるので、各単位領域の色彩を各基準色と比較し、また、カラーコード色間で相互に比較しながら確認して識別コードを決定できる。これにより、カラーコード判別部75は、抽出されたカラーコード部P3の色彩配置を、記憶部8に記憶された色彩配置−コード対応表を参照して、カラーコードターゲットCT1のコード番号を判別する。
【0053】
次に、輝度スケール領域P5又は/及び白色領域P4の検出を行なう(S030)。カラーコードターゲットCT1の輝度スケール領域P5又は/及び白色領域P4を自動あるいは手動で指定する。輝度スケール領域P5及び白色領域P4は、カラーコードターゲットCT1の検出に使用される3個のレトロターゲットに対して予め定められた位置関係にあることから、輝度スケール領域抽出部522又は/及び白色領域抽出部521は先に求められた3個のレトロターゲットの位置から対応する位置を自動的に走査し、検出された色彩を確認する。本実施例では、カラーコードターゲットCT1の右下隅の領域を輝度スケール領域P5として検出する。なお、マニュアルで対応する位置を指定することも可能である。
【0054】
[光源色補正の前処理]
次に、光源色補正(狭義の光源色補正)の前処理を行う。この前処理も狭義の光源色補正に含まれる。この前処理は色補正部71にて行われる。
まず、逆レスポンス関数を推定し、輝度スケール領域P5において検出された画素値(M)に逆レスポンス関数を掛ける処理を行う(S040)。一般的なデジタルカメラではシーン(撮影されるべき撮影対象及びその背景)の放射輝度(I)をデジタルカメラの画素値(M)に対応させるためのレスポンス関数が掛かっている。これは、画像をガンマ補正がされたディスプレイ上で確認した時に自然に見えるようにするためでる。ガンマ補正とは、白色領域がディスプレイ上で、有彩色やグレーが入らず白色になるように基準となる光(RGB)にモニタ特性の逆関数を掛ける補正することをいう。ところが、レスポンス関数の補正に関して、画像の輝度値が線形でないので、輝度補正する場合に単純ではない。例えば、2枚の画像の画素値の比を考えた場合、画素値(M)によって画素値の比が異なってしまう。例えば、白色パッチ(輝度スケール領域の白色部分又は白色領域P4)から輝度補正用のパラメータを推定した場合、そのパラメータを白色パッチ以外の領域(輝度スケール領域の白色以外の部分)に補正パラメータとして使うと補正を正しく行なうことができない。そのため、画素値から放射輝度を算出するには画素値にレスポンス関数の逆関数を掛けて、画素値を線形に変換する必要がある。
【0055】
図7にカメラのレスポンス関数推定のフロー例を示す。まず、輝度スケール領域抽出部522にて輝度スケール領域P5としてグレートーンパッチを検出する(S030)。この際、白色領域抽出部521で白色領域P4を、基準色パターン抽出部52で基準色パターンP2のRGB領域を併せて検出しても良い。白色領域P4と基準色パターンP2のRGB領域を併用することにより、カラーバランスの調整精度を向上できる。次に、逆レスポンス関数の推定処理(S040)として、色補正部71にて次の工程を行う。まず、グレートーンパッチの各パッチ(諧調が等しい部分を1つのパッチとする)の画素値(Mn)の抽出を行なう(S041)。次に、各パッチの画素値の平均値(Mn)を取得する。ここで、nはパッチ番号を表す(n=0〜10)。次に、多項式で画素値(Mn)を近似する(S042)。各パッチの既知の諧調値を放射輝度(In)とする。各点Pn(In,Mn)(n=1〜10)を通る関数f(M)を多項式(式3)で近似する。多項式近似は最小二乗法にて行なう。なお、白色パッチの場合には、n=Nで、輝度値=1である。
【数1】
【0056】
図8にレスポンス関数の例を示す。
図9に逆レスポンス関数の例を示す。逆レスポンス関数はレスポンス関数の逆関数である。
【0057】
次に、図6に戻り、色補正部71にて光源色を算出する(S050)。カラーコードターゲット検出工程(S010)で検出した輝度スケール領域P5がグレートーンパッチである時、又は白色領域P4が白色パッチである時は、領域内の画素値(I)(グレートーンパッチの場合は諧調毎に)の平均を光源色(Ep)(光源のパワーを分光分布で示したもの)とする(式4)(川上玲,R.T.Tan,池内克史:“光源環境の変化を利用した物体色の推定”,画像の認識・理解シンポジウム(MIRU2004)参照)。それ以外のパッチ(カラートーンパッチ)を検出した場合、それぞれの諧調毎にパッチの既知である表面色(S)(表面反射率を分光分布で示したもの)で領域内の画素値(I)を割ることで光源色(Ep)(分光分布)を算出する。そして、算出された光源色(Ep)のRGB成分の二乗和が1となるように正規化する。
【数2】
I:画素値(実測値を分光分布で示したもの)
S:表面色(表面反射率を分光分布で示したもの、白の場合は1)
Ep:推定された光源色(分光分布)
【0058】
[光源色補正]
次に、色補正部71にて光源色補正(狭義の光源色補正)を行なう(S060)。
図10は光源色補正(狭義の光源色補正)のアルゴリズムを説明するための図である。光源を不知の光源に代えて標準の光源を用いるのと等価な補正を行う。撮影した画像に含まれる物が拡散反射物体であり、相互反射や鏡面反射を含まない場合、画像の画素値(I)と表面色(S)と光源色(Ep)の関係は(式4)で表される。ここで、表面色(S)とは物体固有の色であり、光源色(Ep)の変動に対して不変な色である。つまり、光源色補正を行い、光源色(Ep)によらない物体固有の色(S)に基づく画素値を求める。
【0059】
光源色補正(狭義の光源色補正)は、撮影した画像の全画素値を算出された光源色(Ep)で割ることで行なわれる。ここで、(I〜)は補正後の画素値、(I)は補正前の画素値、(Ep)は推定された光源色である。
【数3】
I〜:補正後の画素値
I :補正前の画素値
Ep:(式4)で推定された光源色
【0060】
次に、輝度の補正を行なう(S070)。複数のカメラで同時に画像を撮影した場合について考える。それぞれのカメラで撮影した画像について、光源色の補正(S060)を行なう。この時の各画像は光源色が補正されているが、画像間では画像の明るさを表す輝度が異なる。そこで、各画像について、撮影したグレートーンパッチP5の画素値を基準として輝度を補正する。複数の画像のパッチの画素値の比(R)を計算する。そして、この画素値の比を片方の画像に掛けることにより複数の画像間における輝度の補正を行なう。
【数4】
R:明るさの比
Ep:各カメラにおける光源色
I:各カメラにおける画素値
これにより、画像間の輝度を合わせることができる。なお、ここでは、光源色補正(広義の光源色補正)アルゴリズムについてグレートーンパッチに適用する例を説明したが、カラートーンパッチについても同様に適用できる。
【0061】
[カメラパラメータの調整]
次にパラメータの調整について説明する(特開2007−147457号公報参照)。
【0062】
[相互標定]
本実施の形態において、焦点距離の推定は相互標定時に行われる。ステレオペア選択された撮影画像について、特徴点や基準点と対応点の座標を用いて、標定部63により標定計算処理を行う。標定計算処理により、撮影したカメラの位置、傾き等の外部標定要素、対応点の位置、計測精度(例えば、基準点がある場合には、バンドル調整で算出された三次元座標と基準点との残差の標準偏差、無い場合には、相互標定時の縦視差が用いられる)を求めることができる。標定計算処理は、一対の撮影画像又は一対のモデル画像の対応付けに関しては相互標定で行ない、複数または全画像間の標定に関してはバンドル調整にて行う。相互標定は標定部63で行なわれる。
【0063】
図11は、ステレオ画像におけるモデル画像座標系XYZとカメラ座標系xyzの関係の説明図である。モデル画像座標系の原点を左側の投影中心にとり、右側の投影中心を結ぶ線をX軸にとるようにする。縮尺は、基線長を単位長さにとる。このとき求めるパラメータは、左側のカメラのZ軸の回転角κ1、Y軸の回転角φ1、右側のカメラのZ軸の回転角κ2、Y軸の回転角φ2、X軸の回転角ω2の5つの回転角となる。この場合左側のカメラのX軸の回転角ω1は0なので、考慮する必要はない。
【0064】
【数5】
【0065】
このような条件にすると、(式7)の共線条件式は(式8)のようになり、この式を解けば各パラメータが求まる。
【数6】
【0066】
ここで、モデル座標系XYZとカメラ座標系xyzの間には、次に示すような座標変換の関係式(式9)、(式10)が成り立つ。
【数7】
【0067】
この式の中の、−cが画面距離で、焦点距離fと同等なものなので、この値を変動させ、最適値を選ぶことになる。なお、左右のカメラの焦点距離が異なる時は、(式9)と(式10)のcの値が異なる。
【0068】
これらの式を用いて、次の手順により、未知パラメータを求める。
(i)パラメータ(κ1、φ1、κ2、2、ω2)の初期近似値は通常0とする。
(ii)共面条件式(式8)を近似値のまわりにテーラー展開し、線形化したときの微分係数の値を式(式9)、(式10)により求め、観測方程式をたてる。
(iii)最小自乗法を適用して、近似値に対する補正量を求める。
(iv)近似値を補正する。
(v)補正された近似値を用いて(ii)〜(iv)までの操作を収束するまで繰り返す。
【0069】
仮に、標定点の配置が悪い等の場合、収束しない場合がありうる。正常に行われなかった場合は、標定結果表示でエラーを出力し、どこの画像が悪いか表示する。この場合、画像上に別の標定点があれば変更して上記計算を繰り返す。だめなら標定点の配置変更を行なう。
【0070】
このように、ステレオペア選択された各画像について、抽出された標定点で標定し、撮影したカメラの位置、傾き、対応点の位置、計測精度を求めることができる。標定計算処理は、一対の撮影画像又は一対のモデル画像の対応付けに関しては相互標定で行ない、複数または全画像間の標定に関しては後述するバンドル調整にて行う。
【0071】
〔モデル形成〕
モデル形成部73は、標定部63によって標定計算処理された外部パラメータ(撮影したカメラの位置、傾き)を用いて、モデル及びモデル画像を形成する。ここで、モデル画像とは、偏位修正画像ともいい、撮影画像の一対である左右画像の対応点を同一エピポーラライン上に再配置したものをいう。
【0072】
図12にモデル画像の例を示す。標定処理の結果を用いてモデル画像を形成すると、このように、左右画像のリファレンスポイントRFは同一エピポーラライン(水平線)EP上に再配列される。TGはターゲット(本実施例ではカラーコードターゲットCT1)である。焦点距離の推定を行なう場合には、焦点距離fを変数として離散値を用いるために、左右画像に僅かな縦視差が生じ得るが、本実施の形態ではこれらの画像もモデル画像として扱う。モデル記憶部84は、モデル形成部73で形成された測定対象物2のモデルデータ及びモデル画像を記憶する。表示部41は、ターゲット抽出部5で行う特徴点抽出、対応点探索、ステレオマッチング等の処理において、撮影画像又はモデル形成部73により形成されたモデル画像を一対の画像として表示する。
【0073】
〔焦点距離推定〕
図13に焦点距離推定の処理フロー例を示す。ここでは、ズーム式カメラにおいて予め、複数焦点の焦点位置にてキャリブレーションを行い、これらのデータより焦点距離fに対するカメラ内部パラメータ(主点位置及びレンズディストーション)の近似曲線を求め、撮影パラメータ記憶部85に記憶しておく(ステップS110:内部パラメータ記憶工程)。画像計測用に任意のズーム位置(焦点位置)にてステレオ撮影した(ステップS120、図13では第1の撮影工程と表示)場合、相互標定にて最確(縦視差が最も小さい)な焦点距離fを推定する(ステップS135:標定・焦点距離推定工程)。焦点距離fの推定は標定部63の焦点距離推定部631にて行なう。推定された焦点距離fに基づいてカメラ内部パラメータ(ディストーション及び主点位置)を近似曲線より取り出し、外部パラメータ(カメラの位置、傾き)も相互標定にて演算される(ステップS140:撮影パラメータ演算工程)。このようにして求めたカメラ内部パラメータ及び外部パラメータを用いて、撮影対象物2のモデルを形成し(ステップS155:モデル形成工程)、モデル三次元座標演算を行う(ステップS160:三次元座標演算工程)。かかる手法を焦点距離推定法と称する。
【0074】
モデル画像を形成するためには、少なくとも1回の相互標定を行う。この相互標定の際に、焦点距離推定部631において、ターゲット抽出部5で求められた特徴点、基準点及び対応点を用い、焦点距離fを変数として、一対のモデル画像間の残存縦視差を最小にするように、撮影レンズの焦点距離を推定する(ステップS135)。すなわち、焦点距離推定部631では、相互標定を行い最初のモデル画像を形成する過程で焦点距離fを推定する。このとき、焦点距離推定部631は変数としての焦点距離fを標定部63に供給し、標定部63で相互標定の計算を行って外部標定要素を算出し、モデル形成部73ではその外部標定要素を用いてモデル画像を形成し、焦点距離推定部631では、これらの焦点距離fを変化させたときのモデル画像を比較して残存縦視差が最小となる焦点距離f、すなわち、左右エピポーララインの垂直方向の差異を最小になるような焦点距離fを最確値とする。なお、相互標定を繰り返し行うことにより標定精度を向上できるので、2回目以後の相互標定で形成されたモデル画像を比較して焦点距離fを推定しても良い。
【0075】
焦点距離fを変数として比較する際に、例えば、ズーム式カメラ2の焦点距離が7.2mmから50.8mmで調整可能な場合を取り上げる。焦点距離データの測定個数を6個とすると、7.2mmが最広角となり、52.2mmが最望遠となり、中間の測定点として光学的意味での等間隔で測定をする為に、変数として、8.7mm、11.6mm、24.8mm、39.0mmが選択される。また、この焦点距離の最確値を近似的に求める手法として1段階目として変数を2mm間隔とし、2段階目として1段階目で求めた最確値の近傍で変数を0.5mm間隔とするなどにより、段階式に最確値を求め、高速化をはかることも可能である。そして、後述するように、推定した焦点距離fより、主点位置とレンズディストーションのパラメータを近似曲線より算出・取り出し、これをカメラ内部パラメータとする。また、毎回推定された焦点距離fと対応する内部パラメータを用いて相互標定を行うことにより、焦点距離fを高精度に求めることができる。
【0076】
〔バンドル調整〕
標定計算処理は、複数または全画像間の標定に関してはバンドル調整にて行う。バンドル調整は標定部63にて行なう。カメラ内部パラメータを演算処理するに際し、例えば写真測量分野で使用されている「セルフキャリブレーション付きバンドル調整法」を用いることができる。ここで、「バンドル調整」とは、被写体、レンズ、カメラの撮像面を結ぶ光束(バンドル)は同一直線上になければならないという共線条件に基づき、各画像の光束1本毎に観測方程式をたて、最小自乗法により外部標定要素(撮影したカメラの位置と傾き)とリファレンスポイントRFの座標位置を同時調整する方法である。「セルフキャリブレーション付き」とはさらに、キャリブレーション要素、即ちカメラ内部標定要素(主点位置及びレンズディストーション)を求めることができる方法である。セルフキャリブレーション付きバンドル調整法(以下単に「バンドル調整法」という)の共線条件基本式は、次の(式11)と(式12)である。
【0077】
【数8】
この(式11)と(式12)は、共線条件式(式7)を基本式とするものである。即ちバンドル調整法は、(式11)と(式12))を用いて、複数画像から最小自乗近似して、最適解を算出する手法であり、各撮影位置のカメラの外部標定要素を同時に求めることが可能となる。即ち、カメラのキャリブレーション要素を求めることが可能となる。
【0078】
ここで、内部標定要素の補正モデルとして、放射方向レンズ歪を有する場合の一例を次の(式13)に示す。
【数9】
x0,y0:画面中心(主点位置)
【0079】
〔内部パラメータ〕
ここで、カメラ内部標定要素(カメラ内部パラメータ)について説明する。
図14は、焦点距離と内部パラメータ関数に用いられる係数の関係を説明する図で、図14(A)は(式13)の係数k1、図14(B)は(式13)の係数k2、図14(C)は画像座標系xでのカメラ主点と画像中心のx軸位置ずれ係数x0、図14(D)は画像座標系yでのカメラ主点と画像中心のy軸位置ずれ係数y0を表している。ここでは、前述の説例のように、ズーム式カメラの焦点距離が7.2mmから50.8mmで調整可能な場合を取り上げる。焦点距離データの測定個数を6個とすると、7.2mmが最広角となり、52.2mmが最望遠となり、中間の測定点として光学的意味での等間隔で測定をする為に、8.7mm、11.6mm、24.8mm、39.0mmが選択される。
【0080】
(式13)の係数k1、k2は、最広角側で絶対値が最大となり、最望遠側では小さくなっている。画像座標系xでのカメラ主点と画像中心のx軸位置ずれ係数x0は、ズーム式カメラの焦点距離が11.6mmで極小値を、52.2mmで最小値4.41をとり、24.8mmで最大値4.55をとる複雑な変化をしているので、焦点距離の五次曲線で近似している。画像座標系yでのカメラ主点と画像中心のy軸位置ずれ係数y0は、ズーム式カメラの焦点距離に応じて単調に変化している。なお、チャート撮影画像はピントが合った状態で撮影されるので、ズーム式カメラ2の焦点距離fと、投影中心点O1、O2から画像座標系までの画面距離cとは、等しくなっている。
【0081】
図14の近似曲線に焦点距離fを入力すると、内部パラメータ関数に用いられる係数k1、k2、x0、y0が得られる(ステップS135)。ここで、カメラ主点のずれである座標(x0、y0)が光軸中心(主点位置)を表す。そして、内部パラメータ関数としての(式11)、(式12)、(式13)にこれらの係数を代入して、それぞれの観測点に関して観測方程式を立てる。そして、観測方程式を連立して解くと共に、最小自乗法を適用することで、最も確からしい内部パラメータが算出できる。これらの内部パラメータと焦点距離fの関係は撮影パラメータ記憶部85に入力されており、撮影パラメータ記憶部85から取得可能である。また、ズームレンズの場合には、内部パラメータは撮影画角に対応した撮影条件による影響を加味して読み出される。
また、内部パラメータの主点位置とレンズディストーションは、パスポイント(対応点)の正確な三次元座標を算出するために使用される。
【0082】
〔撮影画像の補正〕
画像データ補正部76は、これらの内部パラメータ係数k1、k2、x0、y0を用いて撮影画像又はモデル画像を補正する。モデル形成部73は、標定部63によって標定計算処理された外部パラメータ(撮影したカメラの位置、傾き)から、測定対象物2のモデル及びモデル画像を形成する(ステップS155)。この際に、画像データ補正部76で補正された撮影画像データやモデル画像データがあれば、これを用いて新たなモデル画像を形成する。これにより、レンズ歪みの影響が除去されたモデル画像を形成できる。表示部41は補正されたモデル画像を表示する。
【0083】
モデル形成部73は、カメラで撮影されたステレオ画像について相互標定で得られた外部標定要素を用いて偏位修正画像(モデル画像)を生成する機能を有し、一組のステレオ撮影された画像を偏位修正して、立体視できるように調整する。さらに、偏位修正されたステレオ画像から、いわゆる絶対標定を行って、各画素(ピクセル)の地上座標を計算する。
【0084】
画像データ補正部76は、さらに絶対標定又は相互標定で得られたステレオ画像データをオルソ画像に変換する機能を有する。オルソ画像とは、写真測量技術に基づき、カメラの傾きや比高等による歪みを補正して正射投影とした画像である。撮影画像記憶部81に格納されたステレオ画像データは、中心投影画像とよばれるものである。画像データ補正部76は、ステレオ画像データの画像を中心投影から正射投影(オルソ)画像に作成し直して、測定対象物2の詳細なモデル画像を作成する。
補正された画像データを用いて精密標定、三次元座標演算を行なうことができる。
【0085】
本実施例における焦点距離推定法(5)の他に、次のようなキャリブレーション方法(1)〜(4)も可能である。
【0086】
(1)目盛り合わせ法:焦点距離は一度目盛り中心に合わせてキャリブレーションを行い、再度その焦点距離に目検討で合わせ、前記キャリブレーションデータを使用して精度評価を実施する。
(2)デジタルカメラデータ解析ツール利用法:デジタルカメラの画像ファイルの規格として使用されるExif(イグジフ、Exchangeable Image File Formatの略語)形式の画像ファイルからデジタルカメラのデータ解析ツールにて得られた焦点距離を使用し、ディストーションと主点位置のパラメータは(3)に記すオンサイト法によりデータ取得し、キャリブレーションデータを作成する。
(3)オンサイト法:予め目盛に合わせて例えば6箇所の焦点距離にてキャリブレーションを実施し、これらのデータより焦点距離に対しディストーション及び主点位置に関する関数を作成しておく。任意のズーム位置でステレオ撮影すると仮定し、焦点距離はセルフキャリブレーション付きバンドル調整により取得する。例えば、パスポイント(対応点)10点とし、取得された焦点距離に対応するキャリブレーションデータを近似曲線より算出する。
(4)固定焦点法:焦点距離を固定してキャリブレーションを実施し、その固定した焦点位置のみにて撮影・解析を行う。
(5)焦点距離推定法:本実施例に該当する方法である。相互標定にて縦視差が最も小さくなるような焦点距離を最確値として算出し、ディストーションと主点位置のパラメータは(4)に記すオンサイト法の近似曲線より算出する。
【0087】
[三次元座標演算]
図15に実施例1における三次元座標演算の処理フロー例を示す。
まず、1組のカラーコードターゲットCT1を配置する(標識配置工程:S100)。標識配置工程(S100)では、カラーコードターゲットCT1をキャリブレーションボックスCBの表面上に配置しても良く、測定対象物2が置かれる場所の周囲に配置しても良く、測定対象物2の表面上に配置しても良い。本実施例ではキャリブレーションボックスCBの表面上に配置することとする。また、カラーコードターゲットCT1は撮影パラメータを求めるのに適した位置関係に配置することが好適である。例えば測定対象物2とほぼ同じ大きさのキャリブレーションボックスCB表面に、測定対象物2の色の変化に対応するように配置することが好ましい。すなわち、色の変化が緩やかな位置ではカラーコードターゲットCTの間隔を疎にし、色の変化が急激な位置ではカラーコードターゲットCTの間隔を密にすることが好ましい。また、カメラのレンズ歪が小さい位置ではカラーコードターゲットCTの間隔を疎にし、カメラのレンズ歪が大きい位置ではカラーコードターゲットCTの間隔を密にすることが好ましい。次に焦点距離推定のため、カメラ内部パラメータ(主点位置及びレンズディストーション)の近似曲線を求め、撮影パラメータ記憶部85に記憶する(ステップS110)。
【0088】
次に、撮影部3のカメラで複数のカラーコード付き標識CTを異なる複数方向から撮影する(第1の撮影工程:S120)。本実施例では表面に複数のカラーコードターゲットCT1が配置されたキャリブレーションボックスCBを撮影する。なお、測定対象物2とその周囲に配置したカラーコードターゲットCTを同時に撮影することも可能であり、測定対象物2の表面上にカラーコードターゲットCTを配置して測定対象物2とカラーコードターゲットCTを同時に撮影することも可能である。次に、位置検出部51にて、第1の撮影工程(S120)で撮影された撮影画像から、位置検出用パターンP1の位置を求める(位置検出工程:S121)。次に、求められた位置検出用パターンP1の位置に基づいて、基準色パターン抽出部52にて、撮影画像から基準色パターンP2を抽出し(基準色パターン抽出工程:S122)。さらに、カラーコードパターン抽出部53にて、撮影画像からカラーコードパターンP3を抽出する(カラーコードパターン抽出工程:S123)。基準色パターン抽出工程(S122)では、白色領域抽出部521及び輝度スケール領域抽出部522にて、それぞれ白色領域P4及び輝度スケール領域P5を抽出する。輝度スケール領域P5に白色パッチがある場合には、白色領域P4の抽出を省略できる。
【0089】
次に、抽出された基準色パターンP2のうち、少なくとも光源色補正に用いる色彩を用いて、色補正部71にて撮影画像の光源色補正を行う(色補正工程:S125)。基準色部P2における白色領域P4及び輝度スケール領域P5には光源色補正に用いる色彩があるので、これを用いて光源色補正を行う。輝度スケール領域P5に白色パッチがある場合には、白色領域P4の使用を省略できる。なお、基準色部P2における光三原色(RGB)パターンを光源色補正に使用しても良い。白色領域に併せて光三原色(RGB)パターンを用いるとカラーバランスの調整精度を向上できる。また、本実施例では、輝度スケール領域P5として、グレースケールパッチを使用するが、これに代えて又は併用してカラースケールパッチを使用することも可能である。次に、カラーコード判別部75にて、色補正工程(S125)で補正されたカラーコードパターンP3の色彩配列を、色彩配置−コード対応表を参照して、カラーコードターゲットCT1のコード番号を判別する(カラーコード判別工程:S130)。
【0090】
次に、標定部63にて標定を行なう。各カラーコードターゲットCT1のコード番号が判別されたので、標定がやり易くなる。標定の際に焦点距離推定部631にて焦点距離の推定を行なう(標定・焦点距離推定工程:S135)。次に、位置検出工程(S121)で抽出された位置検出用パターンP1の位置に基づいて、また、(標定・焦点距離推定工程:S135)で推定された焦点距離fを用いて、撮影パラメータ演算部61にて撮影パラメータを求める(撮影パラメータ演算工程:S140)。
【0091】
次に、キャリブレーションボックスBSを測定対象物2と置き換えて、撮影部3のカメラを用いて再度撮影する(第2の撮影工程:S150)。撮影パラメータ演算工程(S140)で求められた撮影パラメータによりカメラをキャリブレーションして再度撮影するので、精度の高い撮影画像を得られる。測定対象物2とカラーコードターゲットCTを同時に撮影した場合は、第2の撮影工程(S150)を省略できるが、撮影パラメータを用いて撮影画像を補正する。この場合でも精度の高い撮影画像を得るため、再度撮影しても良い。次に、再度撮影された撮影画像を用いて標定部63にて標定を行い、モデル形成部73にてモデル及びモデル画像を形成する(モデル形成工程:S155)。ここで、標定とモデル形成を繰り返してモデルの精度を高めても良い。次に、モデル形成工程(S155)で形成されたモデルを用いて、三次元座標演算部62にて測定対象物2の三次元座標を演算して求める(三次元座標演算工程:S160)。次に、三次元座標演算工程(S160)で求められた三次元座標を用い、色補正工程(S125)で補正された色彩を用いて、テクスチャ形成部74にてモデル各部のテクスチャを形成し、モデルにテクスチャを貼り付ける(テクスチャ形成工程:S165)。テクスチャを貼り付けたモデル画像は表示部41に表示される。これにより測定対象物2のモデルをリアルに表現できる。
【0092】
以上説明したように、本実施例によれば、画像の色彩を光源によらない一定の色に統一する補正を可能にするカラーコードターゲットを提供すること、画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正装置を提供すること、及び画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正方法を提供することができる。
【実施例2】
【0093】
図16に実施例2に係るカラーコードターゲットCT2を示す。実施例1(図1参照)と異なる点を主に説明する。図1とは、右下1/4のエリアのみが異なる。白色領域P4がレトロターゲット部P1と同じ大きさで右下隅に設けられ、右下1/4のエリアで実施例1ではカラーコード部P3として使用されていた部分にグレートーンパッチ部P5が設けられている。したがって、カラーコードの単位領域は4個となっている。グレートーンパッチ部P5は白、黒を除く8階調の横長の無彩色パターンが、輝度の高い方を下にして、階調順に上下に配置されている。基準色部P2の有彩色部分及びカラーコード部P3の配色は図1と同様である(図17と図18についても同様)。
【0094】
カラーコードターゲットCT2のその他の構成は実施例1と同様であり、画像の色彩を光源によらない一定の色に統一する補正を可能にするカラーコードターゲットを提供すること、画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正装置を提供すること、及び画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正方法を提供することができる。この効果は以下の実施例3ないし実施例7についても同様に当てはまる。
【実施例3】
【0095】
図17に、グレートーンパッチ部P5が、カラーコードターゲットCT3の中央部に配置されている例を示す。この例では、グレートーンパッチ部P5が、カラーコードターゲットCT3を左右に2分するように中央部に帯状に配置され、グレートーンパッチ部P5は白、黒を除く8階調の矩形の無彩色パターンが、輝度の高い方を下にして、階調順に上下に配置されている。グレートーンパッチ部P5が配置された中央部では、基準色パターンP2及びカラーコードパターンP3の面積がその分削除されている。なお、基準色パターンP2及びカラーコードパターンP3の面積を変えずに、カラーコードターゲットCTをグレートーンパッチ部P5の幅分横長の矩形に形成しても良い。白色領域P4がレトロターゲット部P1と同じ大きさで右下隅に設けられている。カラーコードターゲットCT3のその他の構成は実施例1と同様である。
グレートーンパッチ部P5の検出は、輝度スケール領域抽出部522にて、カラーコードターゲットCT3の上2点のレトロターゲットの中間点で、2点のレトロターゲットの重心を結ぶ線分に対して垂直に配置されたグレートーンパッチ部P5を検出する。
【実施例4】
【0096】
図18に、グレートーンパッチ部P5が、カラーコードターゲットCT4の周縁部に配置されている例を示す。この例では、グレートーンパッチ部P5が、カラーコードターゲットCT4の上側と左側の周縁部に配置され、グレートーンパッチ部P5は、上側の周縁部では黒を含み、白を除く9階調の正方形の無彩色パターンが、輝度の高い方を右にして、階調順に左右に配置され、左側の周縁部では黒を含み、白を除く9階調の正方形の無彩色パターンが、輝度の高い方を下にして、階調順に上下に配置されている。カラーコードターゲットCT4のその他の構成は実施例1と同様である。
グレートーンパッチ部P5の検出は、輝度スケール領域抽出部522にて、カラーコードターゲットCT4の上2点のレトロターゲットの重心を結ぶ線分と平行に配置され、線分の外側にあるグレートーンパッチ部P5を検出する。また、カラーコードターゲットCT4の左2点のレトロターゲットの重心を結ぶ線分と平行に配置され、線分の外側にあるグレートーンパッチ部P5を検出する。
【実施例5】
【0097】
図19に、グレートーンパッチ部P5が、カラーコードターゲットCT5の位置検出用パターンP1に配置されている例を示す。このカラーコードターゲットCT5は3枚一組となっている。カラーコードターゲットCT5の位置検出用パターンP1の円形のレトロターゲットの部分(グレーに彩色するので再帰反射材料を使用しないが、形状がレトロターゲットと同様であり、位置検出用パターンも機能も有するので、レトロターゲットと称することとする。円形の部分が白色の場合には一般的にレトロターゲットと称されている。なお、再帰反射材料を使用してグレーに配色しても良い)がグレートーンパッチを兼ねている。なお、カラーコードターゲットCT5の3つのレトロターゲットは左上、右上、左下の順番でグレーの輝度が10%ずつ減少する。一組のカラーコードターゲットCT5のレトロターゲットはそれぞれ輝度が異なり、9つのレトロターゲットは10%〜90%の輝度のグレーである。具体的には、カラーコードターゲットの輝度は、 グレートーンパッチ部P5の検出は、位置検出部51にて位置検出用パターンP1の円形のレトロターゲットを検出し、輝度スケール領域抽出部522にてその円形領域の諧調をグレートーンパターンとして検出する。
【実施例6】
【0098】
図20に、グレートーンパッチ部P5が、カラーコードターゲットCT6の位置検出用パターンP1に配置されている別の例を示す。このカラーコードターゲットCT6は2枚一組となっている。カラーコードターゲットCT6の円形のレトロターゲット及び四角形の背景部分がグレートーンパターンを兼ねている。三隅のレトロターゲットの円形の部分の輝度値は10%ずつ異なる。また、丸い領域の外の矩形領域も輝度値は10%ずつ異なる。具体的には、レトロターゲットの輝度は、「00」のカラーコードターゲットでは、左上の丸:100%、四角:50%、右上の丸:90%、四角:40%、左下の丸:80%、四角:30%、「01」のカラーコードターゲットでは、左上の丸:70%、四角:20%、右上の丸:60%、四角:10%、左下の丸:50%、四角:0%である。また、白色領域P4はカラーコードターゲットCTの右下にあり、位置検出用パターンP1と同じ大きさである。その他の構成は実施例1と同様である。
グレートーンパッチ部P5の検出は、位置検出部51にて位置検出用パターンP1の円形のレトロターゲットを検出し、輝度スケール領域抽出部522にてその円形領域及び背景の矩形領域の諧調をグレートーンパターンとして検出する。
【実施例7】
【0099】
図21に、グレートーンパッチ部P5が、カラーコードターゲットCT7の位置検出用パターンP1と同じ寸法の右下隅の領域に配置されている例を示す。このカラーコードターゲットCT7は5枚一組となっている。各カラーコードターゲットCT7を比較すると、この領域の輝度が各カラーコードターゲットCT7で異なっている。白を含み、黒を除く5階調の正方形の無彩色パターンが、カラーコードターゲットCT7の番号順に配置されている。グレートーンパッチ部P5にはコード番号が印刷されている。その他の構成は実施例1と同様である。
グレートーンパッチ部P5の検出は、位置検出部51にて位置検出用パターンP1の円形のレトロターゲットを検出し、輝度スケール領域抽出部522にて位置検出用パターンP1と同じ寸法の右下隅の領域を走査しその諧調を検出する。
【実施例8】
【0100】
図22に、本実施例におけるキャリブレーションボックスの側面を示す。グレースケール領域P5が、カラーコードターゲットCT群を左右に2分するように中央部に帯状に配置され、グレースケール領域P5は白を含み、黒を含まない8階調の矩形の無彩色パターンが、輝度の高い方を上にして、階調順に上下に配置されている。グレースケール領域の左右両側には、各4個のカラーコードターゲットCTが縦一列に配置されている。左右両側のカラーコードターゲットはそれぞれ1組のカラーコードターゲットに属する。1組のカラーコードターゲットCTにおいては、基準色パターンP2の配色は全て同一であり、各カラーコードパターンP3の配色は全て異なる。カラーコードターゲットCTの構成は、白色領域P4が位置検出用パターンと同じ大きさである点を除いて実施例1と同様である。
グレースケール領域P5の検出は、輝度スケール領域抽出部522にてカラーコードターゲットCTの間に貼付されたグレースケール領域P5を検出する。
本実施例についても、グレースケール領域P5を有するので、画像の色彩を光源によらない一定の色に統一する補正を可能にするカラーコードターゲットを提供すること、画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正装置を提供すること、及び画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正方法を提供することができる。
【実施例9】
【0101】
図23に、実施例9に係るカラーコードターゲットCT8の例を示す。本実施例ではカラーコードターゲットCT8がリング状の例を示す。グレースケール領域P5が、カラーコードターゲットCT8の位置検出用パターンP1に配置されている例を示す。
【0102】
リング状のカラーコードターゲットCT8では、位置検出用パターンから成るレトロターゲット部P1、基準色パターンから成る基準色部P2、カラーコードパターンから成るカラーコード部P3が2つの同心円に挟まれたリング状の領域に配置されている。本実施例ではリング状の領域が1環であるが、リング状の領域が2環以上でも良い。基準色パターンP3(3色)及びカラーコードパターンP3(6色)は予め定められた位置に配置されている。本実施例ではこのカラーコードターゲットCT8は2枚一組となっている。1つのカラーコードターゲットCT8は位置検出用パターンP1を6個有している(そのうち1個のレトロターゲットは白色であり、白色領域の機能を有する)が、残りの位置検出用パターンP1(1枚に5個ずつ、合計10個)のレトロターゲットをグレースケール領域P5として兼用する。具体的には、図23の左側のリング状カラーコードターゲットCT8のレトロターゲットの輝度値が10%ずつ異なり、100%〜50%であり、右側のリング状カラーコードターゲットCT8のレトロターゲットの輝度値が10%ずつ異なり、100%及び40%〜0%である。図23の配色は、赤(R)、緑(G)、青(B)、黄(Y)、シアン(C)、マゼンタ(M)を表す。リング状の領域において2つの位置検出用パターンP1に挟まれた単位領域のうちで、1つの単位領域が位置検出用パターンP1に挟まれているのが基準色部P2であり、2つの単位領域が位置検出用パターンP1に挟まれているのがカラーコード部P3である。基準色部P2には光三原色(RGB)が使用されている。
【0103】
本実施例についても、グレースケール領域P5を有するので、画像の色彩を光源によらない一定の色に統一する補正を可能にするカラーコードターゲットを提供すること、画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正装置を提供すること、及び画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正方法を提供することができる。この効果は以下の実施例10ないし実施例13についても同様に当てはまる。
【実施例10】
【0104】
図24に、実施例10に係るカラーコードターゲットCT9の例を示す。本実施例ではカラーコードターゲットCT9がリング状の別の例を示す。グレースケール領域P5が、実施例9でカラーコードターゲットCT8の基準色部P2及びカラーコード部P3のあった位置に配置されている例を示す。グレースケール領域P5は9個の単位領域に白及び黒を除く9階調の無彩色パターンが、リング状領域の位置検出用パターンP1を除いた単位領域の位置に階調順に配置されている。また、位置検出用パターンP1のレトロターゲットは全て白色である。
【実施例11】
【0105】
図25に、実施例11に係るカラーコードターゲットCT10の例を示す。本実施例ではカラーコードターゲットCT10が2環のリング状の例を示す。内側の環が基準色部P2の有彩色部分及びカラーコード部P3として機能し、外側の環がグレースケール領域P5として機能する。外側の環のグレースケール領域P5はカラーコードターゲットCT10の内側の環の基準色部P2及びカラーコード部P3に対応する位置に配置されている。グレースケール領域P5は9個の単位領域に白及び黒を除く9階調の無彩色パターンが、階調順に配置されている。1組のカラーコードターゲットCTにおいては、基準色パターンP2(グレースケール領域P5を含む)の配色は全て同一であり、各カラーコードパターンP3の配色は全て異なる。
【実施例12】
【0106】
図26に、実施例12に係るカラーコードターゲットCT11の例を示す。本実施例ではカラーコードターゲットCT11が2環のリング状の別の例を示す。外側の環が基準色部P2の有彩色部分及びカラーコード部P3として機能し、内側の環がグレースケール領域P5として機能する。内側の環のグレースケール領域P5はカラーコードターゲットCT11の外側の環の基準色部P2及びカラーコード部P3に対応する位置に配置されている。グレースケール領域P5は9個の単位領域に白及び黒を除く9階調の円形の無彩色パターンが、階調順に配置されている。1組のカラーコードターゲットCTにおいては、基準色パターンP2(グレースケール領域P5を含む)の配色は全て同一であり、各カラーコードパターンP3の配色は全て異なる。
【実施例13】
【0107】
図27に、実施例13に係るカラーコードターゲットCT12の例を示す。本実施例ではカラーコードターゲットCT12がリング状の別の例を示す。リングに囲まれた中心円の部分がグレースケール領域として機能する。このカラーコードターゲットCT12は9枚一組となっている(図27ではこのうち3枚を示す)。グレースケール領域P5は中心円に、カラーコードターゲットCT12毎に1つずつ配置されている。グレースケール領域P5は中心円に白を含み、黒を除く9階調の円形の無彩色パターンが、カラーコードターゲットCT12毎に配置されている。リングが基準色部P2の有彩色部分及びカラーコード部P3として機能する。
【実施例14】
【0108】
図28に、実施例14に係るカラーコードターゲットCT13〜CT15の例を示す。本実施例ではグレースケール領域はなく、光源色補正(広義の光源色補正)は白色領域P4及び基準色部P2の光三原色(RGB)パターンを用いて行なう例を説明する。図28(A)にはカラーコードパターンの単位領域が3、図28(B)にはカラーコードパターンの単位領域が6、図28(C)にはカラーコードパターンの単位領域が9の例を示す。図28(B)では、実施例1に比してグレースケール領域P5がなく、白色領域P4がグレースケール領域P5のあった領域まで広がっている。白色領域P4は光に対して良く変化するので、輝度は1点だけであるが、この領域を光源色補正(狭義の光源色補正)に用いることができる。また、基準色部P2のRGB色の配置は実施例1と同様である。基準色パターンP2の赤、緑、青の基準色の画素値が既知であれば、各基準色の輝度は1点ずつであるが、これらの基準色を用いて光源色補正(狭義の光源色補正)を行なうことが可能である。ここで、カラーバランスは、画像上で白色領域P4及び基準色部P2のRGB色に他の色彩が混入しないようにRGBの画素値を調整することにより行なう。カラーバランスの調整は白色領域のみ又は基準色部P2のRGBパターンのみでも可能であるが、両者を併用すると調整の精度を向上できる。また、基準色部P2のRGB色を画面上でほぼ等しい輝度が得られるように定めると、RGBそれぞれの輝度をその近傍で調整することにより、容易にカラーバランスを取ることができるので好ましい。輝度補正については、白色領域P4といずれかの基準色の輝度の2点を用いて行なうことができる。また、白色領域P5に番号が付されていない。カラーコードターゲットCT14のその他の構成は実施例1と同様である。また、図28(A)のカラーコードターゲットCT13及び図28(C)のカラーコードターゲットCT15はカラーコードパターンの単位領域が図28(B)と異なるが、その他の構成は図28(B)と同様である。よって、図28(A)及び図28(C)も白色領域P5及び基準色部P2の光三原色(RGB)パターンを用いて光源色補正(広義の光源色補正)を行なうことができる。
【0109】
以上より、本実施例についても、白色領域P4を有するので、画像の色彩を光源によらない一定の色に統一する補正を可能にするカラーコードターゲットを提供すること、画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正装置を提供すること、及び画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正方法を提供することができる。
【実施例15】
【0110】
実施例1ないし実施例4では、輝度スケールがグレースケールで1本又は2本の例を説明したが、グレースケールとカラースケールの両者を有しても良く、カラースケールとして光三原色(RGB)の各色を有しても良い。本実施例では、カラーコードターゲットCTの周縁部全体に、すなわち、上下左右に、グレートーンパッチ、赤のカラートーンパッチ、緑のカラートーンパッチ、青のカラートーンパッチと4本の輝度スケールを有する例を説明する。グレートーンパッチと光三原色(RGB)のカラートーンパッチを有するので、極めて精度の高い光源色補正を行うことができる。
【実施例16】
【0111】
以上の実施例では、カラーコードターゲットCTの基準色パターンの3つの単位領域の色彩として光三原色(RGB)を用いる例を説明したが、本実施例では光三原色(RGB)のそれぞれがいずれかの単位領域に含まれる例を説明する。本実施例では、3つの単位領域の色彩が、黄(Y)、シアン(C)、マゼンタ(M)の組み合わせとするが、他の組み合わせでも良い。カラーバランスをとるためは、光三原色(RGB)の1つ又は2つを用いても不可であり、光三原色(RGB)のそれぞれがいずれかの単位領域又は輝度スケールに含まれる必要がある。また、光三原色(RGB)が既知の値(輝度値)を持つ必要がある。例えば白色領域は光三原色(RGB)の全てを有するので光源色補正に使用できる。黄(Y)、シアン(C)、マゼンタ(M)の組み合わせとすると、赤(R)、緑(G)、青(B)はそれぞれ2つ単位領域に含まれるので光源色補正に使用できる。黄(Y)と青(B)の組み合わせでも、赤(R)、緑(G)、青(B)はそれぞれ1つ単位領域に含まれるので光源色補正に使用できる。これにより、実施例1と同様に、画像の色彩を光源によらない一定の色に統一する補正を可能にするカラーコード付き標識を提供すること、画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正装置を提供すること、及び画像の色彩を光源によらない一定の色に統一する補正を行うことができる画像色彩補正方法を提供することができる。また、実施例15の赤(R)、緑(G)、青(B)の3つのカラートーンパッチに代えて、黄(Y)、シアン(C)、マゼンタ(M)の3つのカラートーンパッチを用いてもよく、黄(Y)と青(B)の2つのカラートーンパッチを用いても良い。
【実施例17】
【0112】
以上の実施例では、カラーコードターゲットCTがキャリブレーションボックスなどに貼り付けられる例を主に説明したが、以上の実施例のカラーコードターゲットCTが測定対象物2に貼り付けられた場合や、測定対象物2の周囲に配置されて撮影された場合でも、これらのカラーコードターゲットCTを用いて、光源色補正を行なうと共に、測定対象物の三次元計測を行なうことができる。
【実施例18】
【0113】
以上の実施例では、画像色彩補正装置が画像合成部、テクスチャ形成部を有する例について説明したが、画像合成部、テクスチャ形成部が無い場合でも、光源色補正を行なうことができる。
【0114】
以上、本発明の実施の形態について説明したが、本発明は上記の実施例に限定されるものではなく、本発明の趣旨を逸脱しない範囲で実施例に種々変更を加えられることは明白である。
【0115】
例えば、以上の実施例では、カラーコード部のコード色数が主として6の場合について説明したが、任意に設定可能である。また、グレースケール領域の階調数も任意に設定可能である。また、キャリブレーションボックスの形状も直方体に限られず、円筒形でも良い。また、キャリブレーションボックスの代わりにキャリブレーションパネルを使用すると、パネル位置を移動して使用できる。また、装置構成も変更可能である。例えば、撮影部は単カメラを使用しても良く、ステレオカメラを使用しても良い。また、測定方法も変更可能である。例えば、色補正(光源色補正を含む)と撮影パラメータに係るカメラキャリブレーションの順序はどちらを先に行なっても良い。また、以上の実施例では、カラーコードターゲット内にグレースケールを配置する例を主に説明したが、カラーコードターゲットとグレースケールを切り離して配置しても良く、配置の位置も種々変更可能である。
【産業上の利用可能性】
【0116】
本発明は、撮影画像の色彩の補正に利用可能である。
【符号の説明】
【0117】
1 画像色彩補正装置
2 測定対象物
3 撮影部
4 入出力部
5 ターゲット抽出部
6 演算部
7 画像処理部
8 記憶部
9 制御部
10 パーソナルコンピュータ(PC)
31 撮影画像取得部
41 表示部
42 出力部
43 入力部
51 位置検出部
52 基準色パターン抽出部
521 白色領域抽出部
522 輝度スケール領域抽出部
53 カラーコードパターン抽出部
61 撮影パラメータ演算部
62 三次元座標演算部
63 標定部
631 焦点距離推定部
71 色補正部
72 画像合成部
73 モデル形成部
74 テクスチャ形成部
75 カラーコード判別部
76 画像データ補正部
81 撮影画像記憶部
82 基準色記憶部
83 カラーコード記憶部
84 モデル記憶部
85 撮影パラメータ記憶部
200 レトロターゲット
204 内円部
206 外円部
CB キャリブレーションボックス
CT,CTi(iは正整数) カラーコード付き標識(カラーコードターゲット)
EP エピポーラライン
Ep 光源色
f 焦点距離
I 画素値
P1 位置検出用パターン(レトロターゲット部)
P2 基準色パターン(基準色部)
P3 カラーコードパターン(カラーコード部)
P4 白色領域
P5 輝度スケールパターン(グレースケール領域、グレートーンパッチ部)
RF リファレンスポイント
S 表面色
To 明度のしきい値
TG ターゲット
(x0,y0) 光軸中心(主点位置)
【特許請求の範囲】
【請求項1】
面内に、計測位置を示すための位置検出用パターンと、
色彩の基準として用いる色彩及び光源色補正に用いる色彩が施された基準色パターンと、
前記位置検出用パターンに対して所定の位置関係に配置され、標識を識別するための複数の色彩が施されたカラーコードパターンとを有し;
前記光源色補正に用いる色彩が施された基準色パターンとして色相が同一で諧調の異なる複数の色を配置した輝度スケールパターンP5を有する;
カラーコード付き標識。
【請求項2】
前記輝度スケールパターンの色相が無彩色である;
請求項1に記載のカラーコード付き標識。
【請求項3】
前記基準色パターンは、前記輝度スケールパターンの外に光源色補正に用いる色彩として白色が施された白色領域を有する;
請求項1に記載のカラーコード付き標識。
【請求項4】
前記輝度スケールパターンがカラーコード付き標識の中央部に配置されている;
請求項2又は請求項3に記載のカラーコード付き標識。
【請求項5】
前記輝度スケールパターンがカラーコード付き標識の周囲部に配置されている;
請求項2又は請求項3に記載のカラーコード付き標識。
【請求項6】
前記位置検出用パターンを複数備え;
前記複数の位置検出用パターンの全て又は一部が前記輝度スケールパターンを兼用する;
請求項1ないし請求項3のいずれか1項に記載のカラーコード付き標識。
【請求項7】
前記白色領域は目視用の識別記号が付された目視用コードを有し、前記輝度スケールパターンは前記白色領域に隣接して配置されている;
請求項3に記載のカラーコード付き標識。
【請求項8】
矩形に形成され;
前記位置検出用パターンを3個備え;
前記3個の位置検出用パターンが前記カラーコード付き標識の3隅に配置された;
請求項1ないし請求項7のいずれか1項に記載のカラーコード付き標識。
【請求項9】
円形又は円環状に形成され;
複数の位置検出用パターンが同心円状に配置されている;
請求項1ないし請求項7のいずれか1項に記載のカラーコード付き標識。
【請求項10】
面内に、計測位置を示すための位置検出用パターンと、
色彩の基準として用いる色彩及び光源色補正に用いる色彩が施された基準色パターンと、
前記位置検出用パターンに対して所定の位置関係に配置され、標識を識別するための複数の色彩が施されたカラーコードパターンとを有し;
前記光源色補正に用いる色彩が施された基準色パターンとして輝度がほぼ等しくなるような光三原色を用いる;
カラーコード付き標識。
【請求項11】
請求1ないし請求項10のいずれか1項に記載のカラーコード付き標識が同一面内に複数配置されている;
キャリブレーションパネル。
【請求項12】
請求項1ないし請求項10のいずれか1項に記載のカラーコード付き標識が多面体の各面に単数又は複数配置されている;
カラーキャリブレーションボックス。
【請求項13】
請求項1ないし請求項10のいずれか1項に記載のカラーコード付き標識が円筒の面に配置されている;
キャリブレーションボックス。
【請求項14】
請求項1ないし請求項10のいずれか1項に記載のカラーコード付き標識からなる1組のカラーコード付き標識であって;
前記1組のカラーコード付き標識の前記基準色パターンの配色は全て同一であり;
前記1組のカラーコード付き標識の各前記カラーコードパターンの配色は全て異なる;
1組のカラーコード付き標識。
【請求項1】
面内に、計測位置を示すための位置検出用パターンと、
色彩の基準として用いる色彩及び光源色補正に用いる色彩が施された基準色パターンと、
前記位置検出用パターンに対して所定の位置関係に配置され、標識を識別するための複数の色彩が施されたカラーコードパターンとを有し;
前記光源色補正に用いる色彩が施された基準色パターンとして色相が同一で諧調の異なる複数の色を配置した輝度スケールパターンP5を有する;
カラーコード付き標識。
【請求項2】
前記輝度スケールパターンの色相が無彩色である;
請求項1に記載のカラーコード付き標識。
【請求項3】
前記基準色パターンは、前記輝度スケールパターンの外に光源色補正に用いる色彩として白色が施された白色領域を有する;
請求項1に記載のカラーコード付き標識。
【請求項4】
前記輝度スケールパターンがカラーコード付き標識の中央部に配置されている;
請求項2又は請求項3に記載のカラーコード付き標識。
【請求項5】
前記輝度スケールパターンがカラーコード付き標識の周囲部に配置されている;
請求項2又は請求項3に記載のカラーコード付き標識。
【請求項6】
前記位置検出用パターンを複数備え;
前記複数の位置検出用パターンの全て又は一部が前記輝度スケールパターンを兼用する;
請求項1ないし請求項3のいずれか1項に記載のカラーコード付き標識。
【請求項7】
前記白色領域は目視用の識別記号が付された目視用コードを有し、前記輝度スケールパターンは前記白色領域に隣接して配置されている;
請求項3に記載のカラーコード付き標識。
【請求項8】
矩形に形成され;
前記位置検出用パターンを3個備え;
前記3個の位置検出用パターンが前記カラーコード付き標識の3隅に配置された;
請求項1ないし請求項7のいずれか1項に記載のカラーコード付き標識。
【請求項9】
円形又は円環状に形成され;
複数の位置検出用パターンが同心円状に配置されている;
請求項1ないし請求項7のいずれか1項に記載のカラーコード付き標識。
【請求項10】
面内に、計測位置を示すための位置検出用パターンと、
色彩の基準として用いる色彩及び光源色補正に用いる色彩が施された基準色パターンと、
前記位置検出用パターンに対して所定の位置関係に配置され、標識を識別するための複数の色彩が施されたカラーコードパターンとを有し;
前記光源色補正に用いる色彩が施された基準色パターンとして輝度がほぼ等しくなるような光三原色を用いる;
カラーコード付き標識。
【請求項11】
請求1ないし請求項10のいずれか1項に記載のカラーコード付き標識が同一面内に複数配置されている;
キャリブレーションパネル。
【請求項12】
請求項1ないし請求項10のいずれか1項に記載のカラーコード付き標識が多面体の各面に単数又は複数配置されている;
カラーキャリブレーションボックス。
【請求項13】
請求項1ないし請求項10のいずれか1項に記載のカラーコード付き標識が円筒の面に配置されている;
キャリブレーションボックス。
【請求項14】
請求項1ないし請求項10のいずれか1項に記載のカラーコード付き標識からなる1組のカラーコード付き標識であって;
前記1組のカラーコード付き標識の前記基準色パターンの配色は全て同一であり;
前記1組のカラーコード付き標識の各前記カラーコードパターンの配色は全て異なる;
1組のカラーコード付き標識。
【図4】

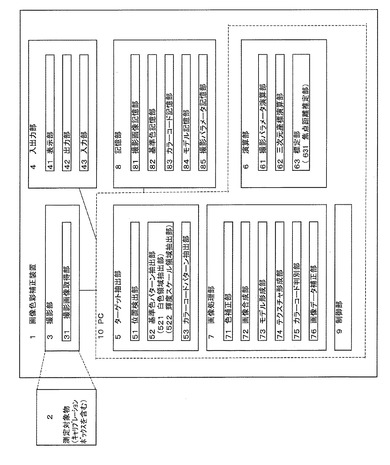
【図5】
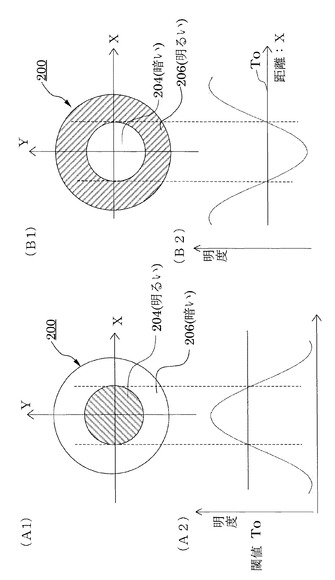
【図6】
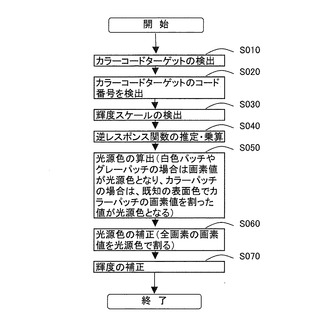
【図7】
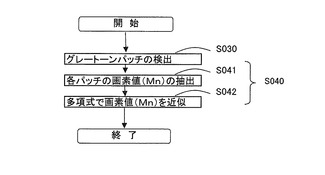
【図8】
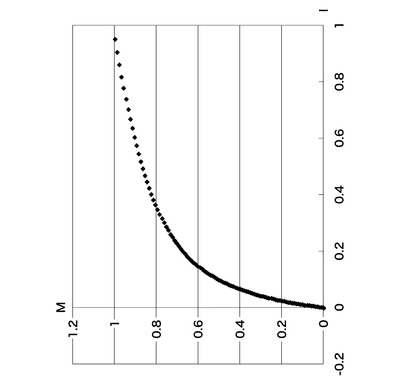
【図9】
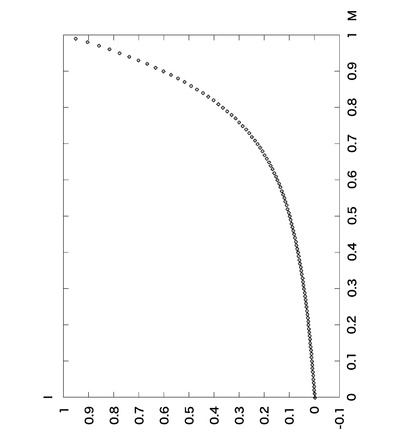
【図10】
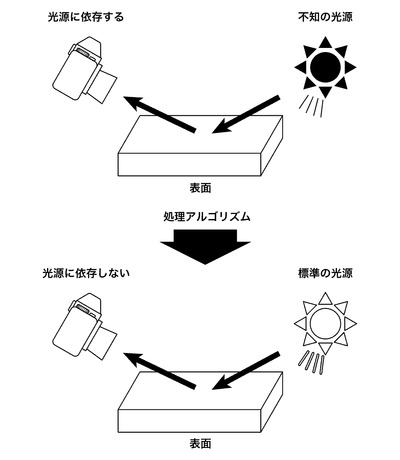
【図11】
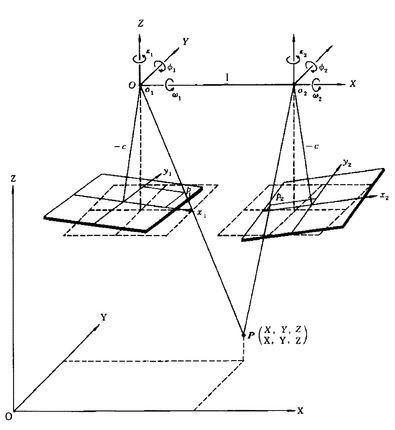
【図12】
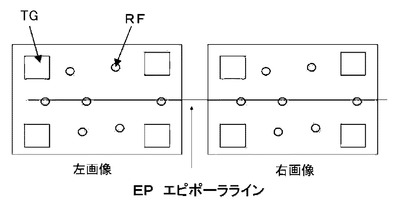
【図13】
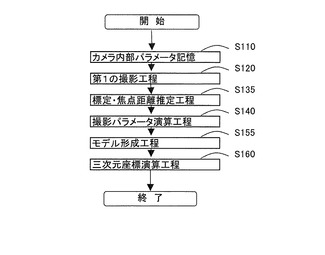
【図14】
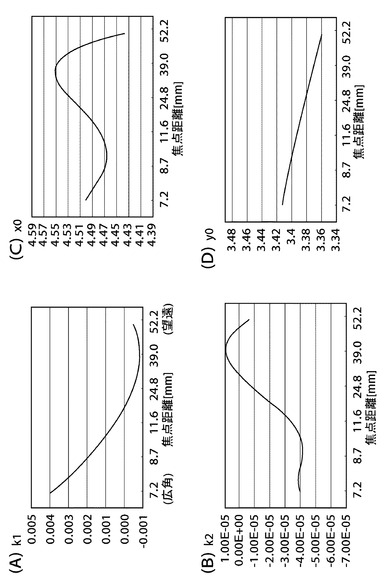
【図15】
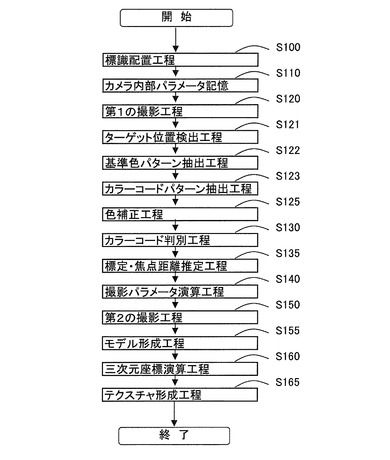
【図28】
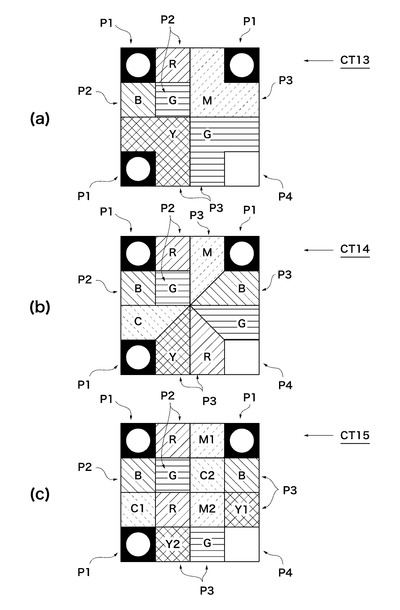
【図1】
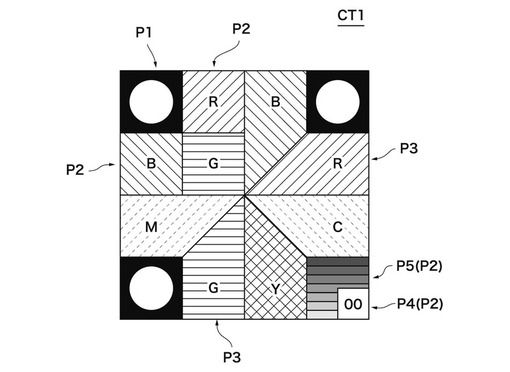
【図2】
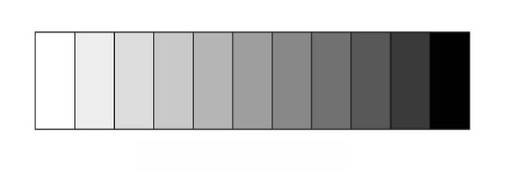
【図3】
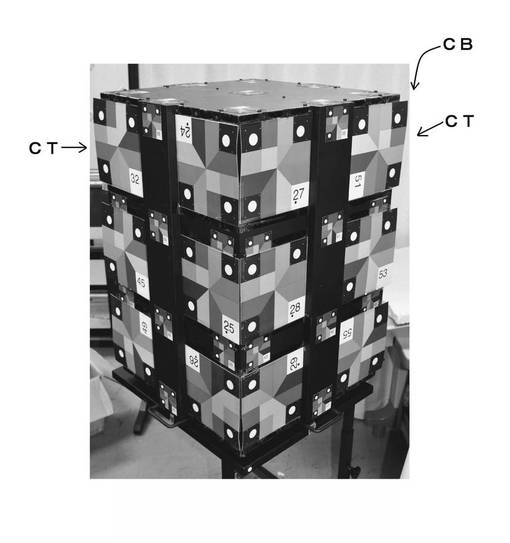
【図16】
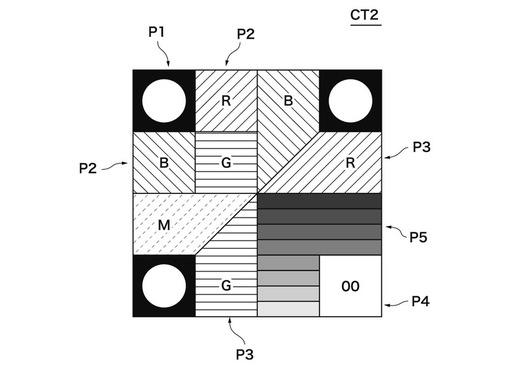
【図17】
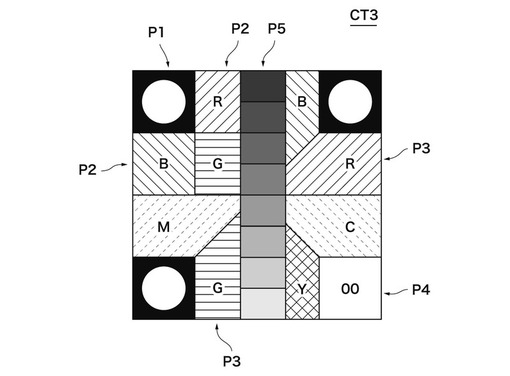
【図18】
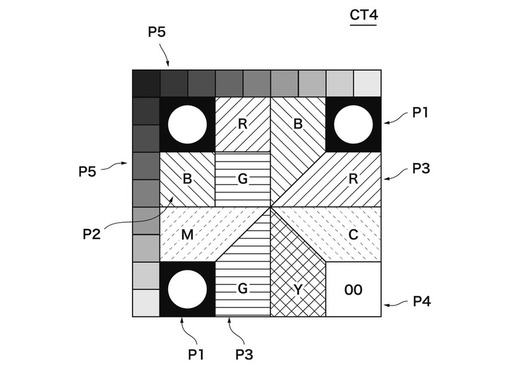
【図19】
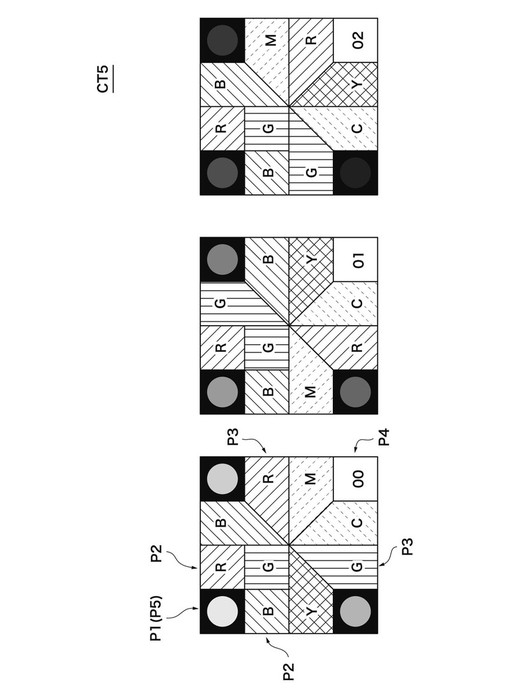
【図20】
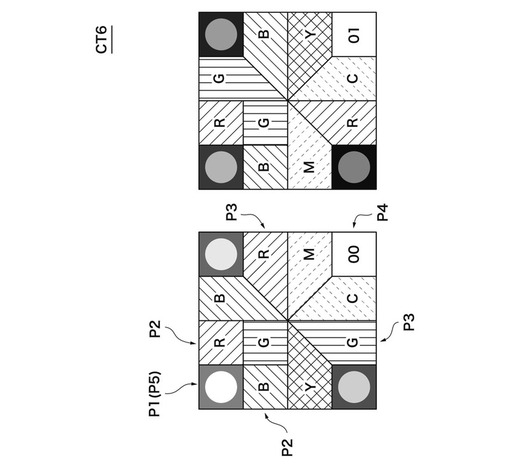
【図21】
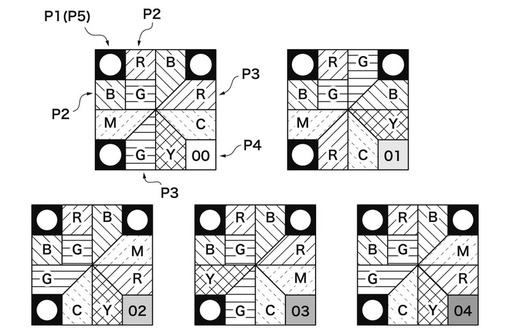
【図22】
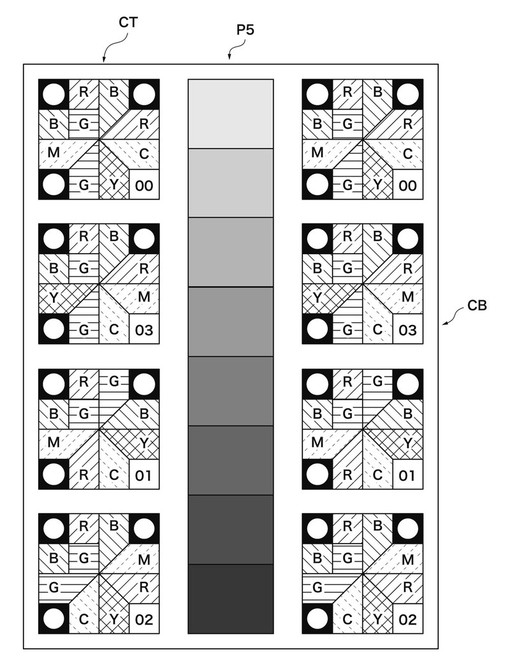
【図23】
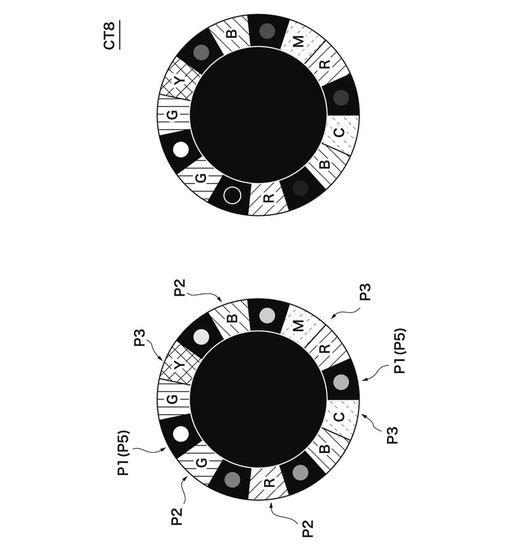
【図24】
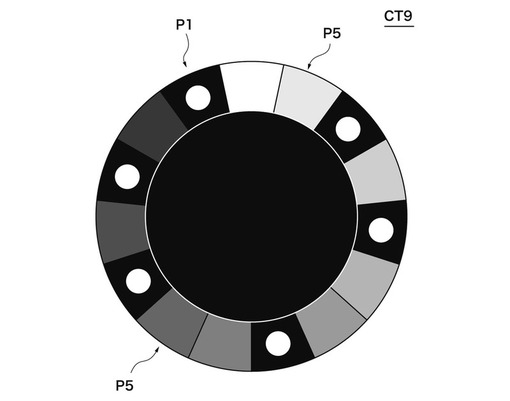
【図25】
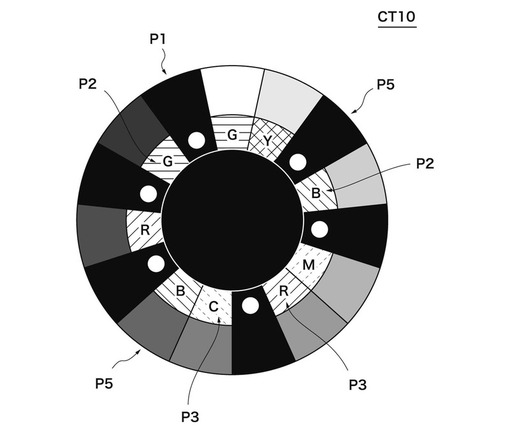
【図26】
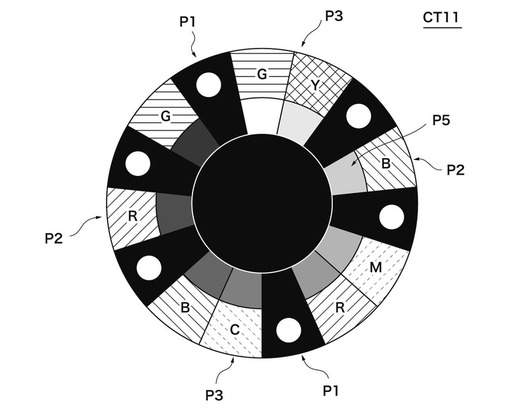
【図27】
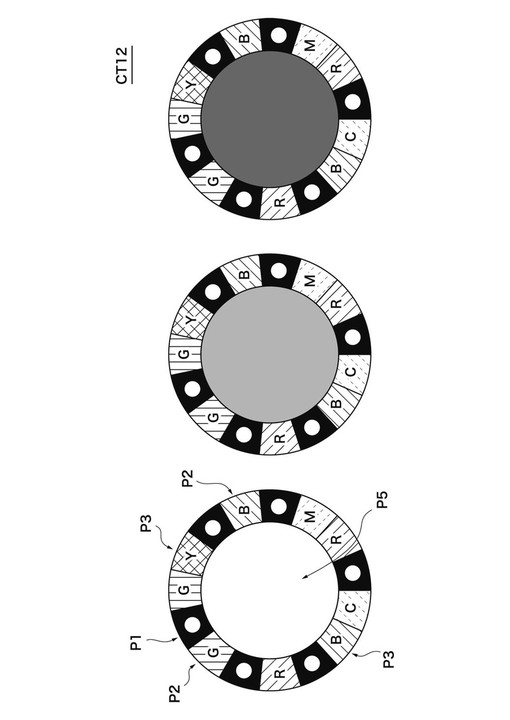
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図28】
【図1】
【図2】
【図3】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【公開番号】特開2012−181129(P2012−181129A)
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願番号】特願2011−44973(P2011−44973)
【出願日】平成23年3月2日(2011.3.2)
【出願人】(000220343)株式会社トプコン (904)
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願日】平成23年3月2日(2011.3.2)
【出願人】(000220343)株式会社トプコン (904)
[ Back to top ]