
カンチレバー型センサ
【課題】高精度に物理量を検出することができるようにする。
【解決手段】ブリッジ回路18Aによって、カンチレバー10の振動状態に応じた歪み抵抗素子16Aの抵抗変化を電圧変化として検出し、検出した振動信号を出力する。また、カンチレバー10が共振している状態において、ハイパスフィルタ19Bによって振動信号から高周波数成分の共振信号が取り出され、ローパスフィルタ19Cによって、振動信号から低周波数成分としてのDC成分の変形信号が取り出される。そして、変形信号を用いて共振信号を補正して、共振周波数の変化を検出し、共振周波数の変化からカンチレバーに付着した物質の質量の時間変化を検出する。または、変形信号に基づいて、温度の時間変化を検出する。
【解決手段】ブリッジ回路18Aによって、カンチレバー10の振動状態に応じた歪み抵抗素子16Aの抵抗変化を電圧変化として検出し、検出した振動信号を出力する。また、カンチレバー10が共振している状態において、ハイパスフィルタ19Bによって振動信号から高周波数成分の共振信号が取り出され、ローパスフィルタ19Cによって、振動信号から低周波数成分としてのDC成分の変形信号が取り出される。そして、変形信号を用いて共振信号を補正して、共振周波数の変化を検出し、共振周波数の変化からカンチレバーに付着した物質の質量の時間変化を検出する。または、変形信号に基づいて、温度の時間変化を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、カンチレバー型センサに係り、特に、片持ち張り(カンチレバー)を用いて物理量を高精度に検出することができるカンチレバー型センサに関する。
【背景技術】
【0002】
原子間力電子顕微鏡で用いられているカンチレバーは、共振点を持ち、外部から受ける力により共振点がシフトすることを利用して微小な力であるpN(ピコニュートン)単位の力を計測できるセンサとして利用されている。
【0003】
カンチレバーをバイオセンサとして利用した論文としては、ラング等が発表したセンサ(非特許文献1)が知られている。
【0004】
このカンチレバー型センサは、光てこを利用して小さなカンチレバーの共振周波数の変化を検出し、物理量、化学量、温度、または応力等を検出するセンサである。
【非特許文献1】”人工ノーズ”(アナリティカ ケミカ アクタ Analytica Chamica Acta 第393巻(1999年)59頁)
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、従来のカンチレバー型センサでは、検出環境に影響されて、多くの誤差が生じるため、精度よく物理量を検出することができない、という問題がある。
【0006】
本発明は、上記問題を解決するためになされたもので、高精度に物理量を検出することができるカンチレバー型センサを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の目的を達成するために本発明に係るカンチレバー型センサは、カンチレバーと、前記カンチレバーを振動させるアクチュエータと、前記カンチレバーの振動状態を検出する振動検出手段と、前記カンチレバーが共振するように前記アクチュエータを制御する制御手段と、前記カンチレバーが共振するように制御されている状態で、前記振動検出手段で検出された前記振動状態の低周波数成分、又は前記低周波数成分及び高周波数成分に基づいて、物理量を検出する物理量検出手段とを含んで構成されている。
【0008】
本発明に係るカンチレバー型センサによれば、カンチレバーが共振するように制御されている状態で、物理量が変化するとカンチレバーの共振周波数等の振動状態が変化する。この振動状態の低周波数成分、又は振動状態の低周波数成分及び高周波数成分の変化と、物理量とは相関があるため、振動検出手段で検出された振動状態の低周波数成分、又は低周波数成分及び高周波数成分に基づいて、物理量を検出することができる。
【0009】
このように、カンチレバーの振動状態の低周波数成分、又は低周波数成分及び高周波数成分に基づいて、物理量を検出することにより、高精度に物理量を検出することができる。
【0010】
ここで、振動状態は、振動していない状態を含む状態を示しており、また、高周波数成分は、共振周波数又は加振周波数を含んだ周波数成分である。
【0011】
本発明に係る制御手段は、振動検出手段で検出された振動状態に基づいて、カンチレバーが共振するようにアクチュエータを制御することができる。これによって、カンチレバーが共振するように制御することができる。
【0012】
本発明に係る制御手段は、アクチュエータを制御して、カンチレバーをパルス加振させることができる。これによって、カンチレバーの共振周波数で、カンチレバーが共振するように加振制御することができる。
【0013】
本発明に係る制御手段は、アクチュエータを制御して、カンチレバーが共振するように、カンチレバーの加振周波数を変化させることができる。これによって、カンチレバーの共振周波数で、カンチレバーが共振するように制御することができる。
【0014】
また、本発明に係る物理量検出手段は、振動検出手段で検出された振動状態の低周波数成分に基づいて、温度を物理量として検出することができる。これによって、カンチレバーの振動状態の低周波数成分と温度とは相関があるため、低周波数成分に基づいて、高精度に温度を検出することができる。
【0015】
また、上記の物理量検出手段は、振動状態の低周波数成分と温度との予め定められた関係に基づいて、振動検出手段で検出された振動状態の低周波数成分に応じた温度を検出することができる。
【0016】
本発明に係る物理量検出手段は、低周波数成分に基づいて高周波数成分の変化を予測し、予測された高周波数成分の変化より高周波数成分を補正することにより、カンチレバーに付着した物質の付着量を物理量として検出することができる。これによって、カンチレバーの振動状態の高周波数成分と付着量とは相関があり、低周波数成分によって高周波数成分に混入した誤差を求めることができるため、低周波数成分に基づいて高周波数成分の変化を予測して高周波数成分を補正し、補正された高周波数成分に基づいて、カンチレバーに付着した物質の付着量を高精度に検出することができる。
【0017】
ここで、上記の高周波数成分には、カンチレバーの共振周波数が含まれている。これによって、共振周波数とカンチレバーに付着した物質の付着量とは相関があるため、共振周波数を含む高周波数成分に基づいて、カンチレバーに付着した物質の付着量を検出することができる。
【0018】
上記の振動検出手段を、カンチレバーの振動状態を検出するようにカンチレバーに設けられたセンサで構成することができる。これによって、センサがカンチレバーに設けられているので自己検知型であり、このため、バイオセンサを使用する際に再度調整する必要がなく、簡便に使用することができる。
【0019】
上記のカンチレバーに設けられたセンサを、カンチレバーの振動に応じて抵抗が変化する歪み抵抗素子を含んで構成することができる。
【0020】
上記のカンチレバーに設けられたセンサを、歪み抵抗素子、及び歪み抵抗素子の抵抗の変化によって振動状態を検出するためのブリッジ回路を含んで構成することができる。
【0021】
また、上記のカンチレバーを、液中に浸漬するか、ガス中に配置するか、真空中に配置するか、又は大気中に配置して使用することができる。
【0022】
上記の物理量検出手段は、カンチレバーの反りを検出する反り検出手段を有することができる。これによって、カンチレバーの反りに基づいて、物理量を検出することができる。
【0023】
また、カンチレバーの表面を、金属、絶縁物、有機物、抗原、抗体、及びDNAの少なくとも一つで被覆することができる。
【0024】
また、上記のカンチレバー型センサは、カンチレバーを複数有することができる。これによって、複数のカンチレバーの各々について、物理量を検出することができる。
【発明の効果】
【0025】
以上説明したように、本発明のカンチレバー型センサによれば、カンチレバーの振動状態の低周波数成分、又は低周波数成分及び高周波数成分に基づいて、物理量を検出することにより、高精度に物理量を検出することができる、という効果が得られる。
【発明を実施するための最良の形態】
【0026】
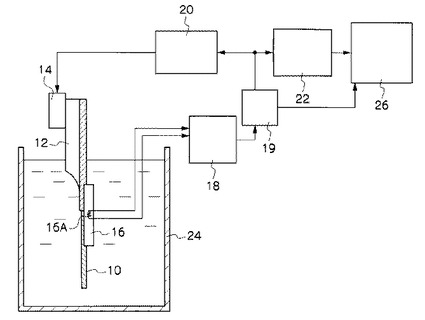
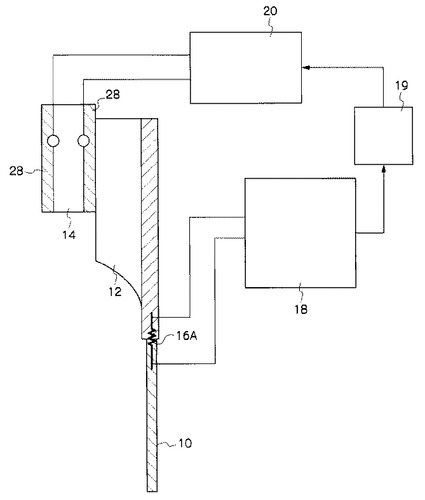
以下、本発明の実施の形態について図面を参照して説明する。図1に示すように、本発明の第1の実施の形態に係るカンチレバー型バイオセンサは、基板としての台座12に支持された薄板状のカンチレバー10を備えている。
【0027】
台座12には、台座12を加振することによりカンチレバー10を振動させる圧電素子で構成されたアクチュエータ14が取り付けられている。アクチュエータ14は、台座12に接着又は機械的に接合させて、台座12と一体化するように取り付けられている。また、アクチュエータ14を取り付ける位置は、カンチレバー10をカンチレバー10の厚み方向に振動させることができる位置であればよく、図示したように台座12のカンチレバーが形成されていない側、又はカンチレバーが形成されている側に取り付けられる。
【0028】
また、カンチレバー10の台座12との接合部16には、自己検知型のセンサである歪み抵抗素子16Aが埋め込まれている。アクチュエータ14によりカンチレバー10を厚み方向に振動させることにより、カンチレバー10の台座12との接合部16に引張り及び圧縮応力が生じて、歪み抵抗素子16Aの抵抗値が変化し、また、歪み抵抗素子16Aの抵抗は、カンチレバー10の位置情報を表わすため、歪み抵抗素子16Aの抵抗に基づいて、カンチレバー10の位置情報を検出することができ、位置情報の変化(抵抗値の変化)から、カンチレバー10の振動状態を検出することができる。
【0029】
カンチレバー10は、シリコン、SiN、SiO2等で形成された半導体基板を台座12に相当する部分を残存させて薄板状にエッチングすることにより、台座12と一体的に形成することができる。また、歪み抵抗素子16Aについては、カンチレバー10の台座12との接合部16に、半導体技術で一対の電極が形成されており、ボロン等の不純物原子を電極間にイオン打ち込みすることにより歪み抵抗パターンが形成されて作成されている。歪み抵抗の抵抗値は、2kΩ以下が望ましい。なお、カンチレバー10と台座12とは、シリコン基板で形成することが好ましいが、イオン打ち込みすることなく、既存の歪み抵抗素子を貼着するようにしてもよい。
【0030】
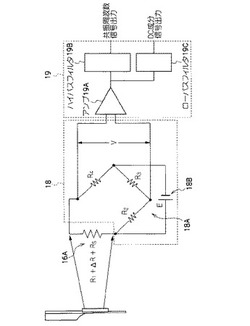
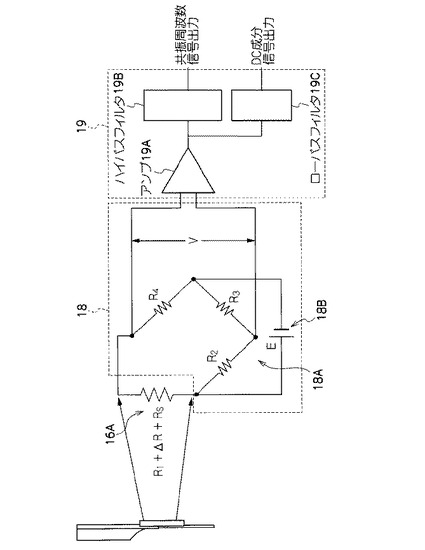
歪み抵抗素子16Aの電極には、歪み抵抗素子16Aの抵抗値の変化を検出するための検出回路18が接続されている。図2に示すように、検出回路18は、歪み抵抗素子16Aの電極が接続されたホイーストンブリッジを構成するブリッジ回路18A、及びブリッジ回路に電圧を印加する電源18Bを備えており、カンチレバー10の振動状態に応じた歪み抵抗素子16Aの抵抗変化を電圧変化として検出し、検出した振動信号を出力する。
【0031】
この検出回路18には、検出回路18から出力された信号を増幅すると共に、増幅した信号から高周波数成分と低周波数成分とを取り出す増幅回路19とが接続されている。増幅回路19は、信号を増幅するためのアンプ19Aと、増幅された信号の高周波数成分を取り出すためのハイパスフィルタ19Bと、増幅された信号の低周波数成分を取り出すためのローパスフィルタ19Cとを備えており、カンチレバー10が共振している状態では、ハイパスフィルタ19Bによって高周波数成分として共振信号が取り出される。また、ローパスフィルタ19Cは、低周波数成分としてDC成分の信号が取り出される。
【0032】
この増幅回路19のハイパスフィルタ19Bの出力端は、アクチュエータ14を駆動してカンチレバー10を共振させるための正帰還回路20、及び周波数を電圧に変換するF−V変換回路(FM復調回路)22に接続されている。F−V変換回路22は、増幅回路19のハイパスフィルタ19Bから出力される共振信号の周波数を電圧Vに変換して出力する。
【0033】
F−V変換回路22には、データ処理及び表示を行なうパーソナルコンピュータ26が接続されている。また、増幅回路19のローパスフィルタ19Cの出力端は、パーソナルコンピュータ26に接続されている。
【0034】
パーソナルコンピュータ26は、一般的なパーソナルコンピュータの構成であり、CPU、ROM、RAM、ハードディスク、ディスプレイ等を備えており、F−V変換回路22及び増幅回路19のローパスフィルタ19Cから入力されたデータをハードディスクに保存し、また、保存したデータに基づいて所定のデータ処理を行う。
【0035】
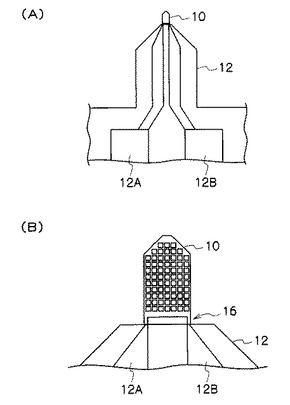
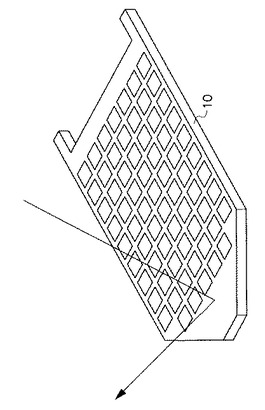
以下、本実施の形態のカンチレバー10の構成について図3を用いて説明する。図3(A)に示すように、台座12の先端にカンチレバー10の一端が支持されて取り付けられており、また、台座12の中には、2つの電極12A、12Bが形成されている。また、図3(B)に示すように、2つの電極12A、12Bは、接合部16で接続されている。また、カンチレバー10の表面には、表面に開口し、かつ、カンチレバー10の厚さ方向に貫通する複数の貫通孔10Aを穿設されている。貫通孔10Aの開口部は、各々矩形状のフレーム構造となっており、一辺が3μm〜6μmの大きさとなっている。粘性抵抗を小さくするために、分子の移動をスムーズにするとよいことから、開口面積をできるだけ大きくするために、複数の貫通孔10Aを穿設する。また、物質が付着する部分の面積を増やすために、カンチレバー10の表面積ができるだけ大きくなるように構成するとよい。
【0036】
次に、本実施の形態のカンチレバー型センサで温度を検出するための原理について説明する。製作時のエッチングや蒸着により、カンチレバーはひずみを持っており、カンチレバーのそりは、以下の(1)式で表わされる。
【0037】
【数1】

【0038】
ここで、kはバネ定数、F(x)はひずみによる力、xはそりの変位である。
【0039】
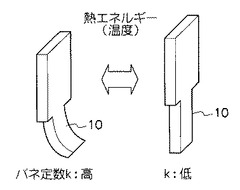
カンチレバーを微小化すると、カンチレバーはひずみを持ち、温度によってひずみが変化する。例えば、図4に示すように、温度上昇により、カンチレバーがリラックスするようにカンチレバーが変形し、ひずみが少なくなり、そりの変位が小さくなる方向に変化する。また、見かけ上のバネ定数が、減少する。このように、温度によってバネ定数が変化するため、カンチレバーが温度センサとして機能する。
【0040】
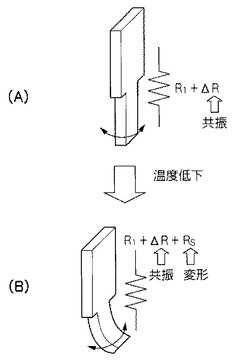
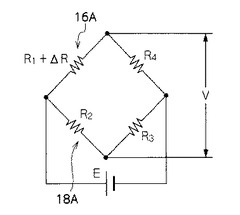
また、図5に示すように、温度が変化すると、カンチレバーのひずみが変化するため、歪み抵抗素子の抵抗が変化する。例えば、振動していない初期状態における歪み抵抗素子の抵抗をR1とし、カンチレバーの共振による抵抗変化をΔRとすると、ひずみが変形する前の初期状態における歪み抵抗素子の抵抗は、(R1+ΔR)である(図5(A)参照)。このとき、ブリッジ回路から出力される振動信号Vは、以下の(2)式で表わされる(図6参照)。
【0041】
【数2】
【0042】
ここで、Eは検出回路の電源の電圧であり、Rはブリッジ回路の抵抗の和であり、以下の(3)式で表わされる。
R=R1+R2+R3+R4 ・・・(3)
【0043】
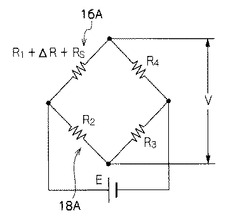
また、温度が変化し、カンチレバーのひずみが変形した後については、ひずみの変形による歪み抵抗素子の抵抗変化をRsとし、温度変化後におけるカンチレバーの共振による抵抗変化をΔR´とすると、歪み抵抗素子の抵抗は、(R1+ΔR´+Rs)となる(図5(B)参照)。このとき、ブリッジ回路から出力される振動信号Vは、以下の(4)式で表わされる(図7参照)。
【0044】
【数3】
【0045】
上記(2)式で表わされる振動信号は、共振信号である。一方、上記(4)式で表わされる振動信号の第1項は、共振信号を表わし、第2項は、ひずみの変形による歪み抵抗素子の抵抗変化に応じた電圧変化を示す変形信号を表わしている。従って、温度が変化する前には、ハイパスフィルタから上記(2)式で表わされる共振信号が出力される。一方、温度が変化した後には、ハイパスフィルタから上記(4)式の第1項で表わされる共振信号が出力され、ローパスフィルタから上記(4)式の第2項で表わされる変形信号が出力される。
【0046】
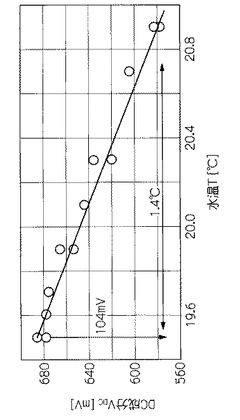
また、ローパスフィルタから出力される変形信号は、ブリッジ回路から出力される振動信号のDC成分電圧VDCであり、カンチレバーを水中に浸漬けした場合には、このDC成分電圧VDCと水温との関係は、図8に示すような関係となる。
【0047】
上記図8に示すように、DC成分電圧VDCが高くなるほど、水温Tが低下し、DC成分電圧VDCが低くなるほど、水温Tが上昇する。例えば、DC成分電圧VDCが104mV低下すると、水温Tが1.4℃上昇する。従って、増幅回路のローパスフィルタからの出力であるDC成分電圧の変化によって、水温の変化を検出することができる。
【0048】
以下、本実施の形態のカンチレバー型センサを用いた温度の検出方法について説明する。正帰還回路20から加振信号がアクチュエータ14に入力されると、アクチュエータ14によって、台座12が加振され、これによってカンチレバー10がカンチレバーの厚み方向に加振される。容器24中の反応溶液にカンチレバー10を浸漬すると、カンチレバー10に反応溶液が付着すると共に反応溶液の粘性の影響によってカンチレバー10の振動数が若干減少する。しかしながら、このとき種々の振動モードが発生するので、カンチレバー10は当初の共振周波数とは異なる周波数で共振する。このときのカンチレバー10と台座12との動きが一体ではないので、歪み抵抗素子16Aに引張り及び圧縮応力が発生し、歪み抵抗素子16Aの抵抗が変化するため、歪み抵抗素子16Aに一定電圧を印加していると、電流がカンチレバー10の振動に応じて変化する。この電流変化を検出回路18のブリッジ回路18Aで電圧変化として検出することにより、カンチレバー10の振動状態としての振動周波数を検出することができる。
【0049】
また、増幅回路19のハイパスフィルタ19Bによって、ブリッジ回路18Aから出力されるカンチレバー10の振動状態を示す振動信号のうち、高周波数成分である共振信号を取り出す。このハイパスフィルタ19Bによって取り出された共振信号の電圧変化は、正帰還回路20で増幅され、位相が揃えられ、アクチュエータ14に入力される。これによって、カンチレバー10は共振周波数で振動される。
【0050】
また、増幅回路19のローパスフィルタ19Cによって、ブリッジ回路18Aから出力される振動信号のうち、低周波成分としてのDC成分である変形信号(カンチレバー10の反りを表わす信号)を取り出す。このローパスフィルタ19Cによって取り出された変形信号の電圧は、パーソナルコンピュータ26に入力される。
【0051】
そして、パーソナルコンピュータ26は、ローパスフィルタ19Cによって取り出されたアナログ信号をデジタル信号に変換して取り込み、上述した図8の温度とDC成分電圧との予め定められた関係に基づいて、取り込んだ信号の電圧の変化に応じた温度の時間変化を検出する。また、この温度の時間変化を所定時間にわたって積算することにより、所定時間内に変化した温度を検出することができる。
【0052】
このようにして検出した温度変化は、パーソナルコンピュータ26に接続されているLCD等の表示装置に表示される。
【0053】
以上説明したように、第1の実施の形態に係るカンチレバー型センサによれば、カンチレバーの振動状態の低周波数成分と温度とは相関があるため、カンチレバーの振動状態を示す振動信号の低周波数成分に基づいて、温度を検出することにより、高精度に温度を検出することができる。
【0054】
従来の温度センサには熱電対、水晶発振器などが用いられているが、小型、高感度の点で問題があり、温度測定素子が大きい場合、熱伝導により微小部の熱がセンサに移動し、正確な温度が計測できないという欠点があったが、本実施の形態に係るカンチレバー型センサによれば、素子のボリュームの問題を解消することができ、高感度で小型な温度センサを実現することができる。
【0055】
なお、本実施の形態では、DC成分電圧の変化から温度の変化を検出する場合を例に説明したが、DC成分電圧の変化から温度を検量するための予め定められた検量曲線に基づいて、DC成分電圧の変化に応じた温度を求めるようにしてもよい。
【0056】
次に、第2の実施の形態に係るカンチレバー型バイオセンサについて説明する。なお、第2の実施の形態に係るカンチレバー型バイオセンサは、第1の実施の形態と同様の構成であるため、同一符号を付して説明を省略する。
【0057】
第2の実施の形態では、ハイパスフィルタから出力される共振信号及びローパスフィルタから出力される変形信号に基づいて、カンチレバーに付着した物質の付着量を検出している点が第1の実施の形態と異なっている。
【0058】
第2の実施の形態に係るカンチレバー型バイオセンサは、パーソナルコンピュータ26において、F−V変換回路22及び増幅回路19のローパスフィルタ19Cの各々からデータを取り込んで、取り込んだデータに対して所定の計算処理を行うことにより、カンチレバーに付着した物質の付着量を検出する。
【0059】
次に、本実施の形態のカンチレバーに付着した物質の質量を検出するための原理について説明する。カンチレバーは、外力が加わると撓み、共振している状態で質量が変化すると共振周波数が変化する。カンチレバーの動作は以下の(6)式の運動方程式で表すことができる。
【0060】
【数4】
ここで、mはカンチレバーの有効質量、aはカンチレバーが浸漬されている液体等の粘性係数、kはカンチレバーのバネ定数、Asinωtはアクチュエータの励振力、F(x)はアクチュエータへの外力、xはカンチレバーの変位である。また、F(x)は力勾配F´と変位xとの積で表されるので、以下の(7)式で表わすことができる。
【0061】
【数5】
【0062】
また、一般式は、以下の(8)式で表すことができる。
【0063】
【数6】
【0064】
また、上記(6)式より、a及びF´が小さく無視できるとすると、カンチレバーの共振周波数f0は、カンチレバーの有効質量m及びばね定数kを用いて以下の(9)式で表わされる。
【0065】
【数7】
【0066】
ここで、カンチレバーが共振周波数f0で共振している状態で、カンチレバーの質量がΔm増加すると、上記(9)式は、周波数の変化Δfを用いて、以下の(10)式のように表される。
【0067】
【数8】
【0068】
したがって、上記(10)式より、カンチレバーの共振周波数の変化を検出することにより、カンチレバーの質量の変化、すなわちカンチレバーに付着した物質の質量を検出することができる。周波数の変化を1Hz以下の精度で計測できることから、上記(10)式ではピコグラムまたはフェムトグラムでカンチレバーの質量の変化が計測できることを意味する。例えば、共振周波数f0を100kHz、カンチレバーの有効質量mを10ngとすると、約1pg/Hzの感度でカンチレバーに付着した物質の質量を検出することができる。
【0069】
ここで、大気中測定と水中測定とでは粘性係数aが変化することを考慮する必要があるため、以下に説明するように、粘性を考慮する場合(水中の場合)の周波数変化Δfを解析する。
【0070】
粘性係数aを考慮し、aが0でない場合には、上記(8)式より、共振周波数fは以下の(11)式で表わされる。
【0071】
【数9】
【0072】
上記(11)式を、m、kで全微分すると、共振周波数の変化Δfが以下の(12)式が表わされる。
【0073】
【数10】
【0074】
また、Δm=0とすると、上記(12)式より、共振周波数の変化Δf2が以下の(13)式で表わされる。
【0075】
【数11】
【0076】
一方、バネ定数の変化を無視すると、Δk=0となるため、上記(12)式より、共振周波数の変化Δf1は、以下の(14)式で表わされる。
【0077】
【数12】
【0078】
上記(14)式より、粘性aの変化や、温度等の変化による内部のひずみ量(力勾配F´)の変化によって、周波数変動が起こる。粘性aに関しては、非常に変化が少ないので無視できる。一方、温度等の変化は、カンチレバーのひずみから測定できる。また、ひずみは、共振周波数より非常に低い周波数で変化をするものであるから、共振周波数の低周波数成分であるDC成分に基づいて、カンチレバーのひずみ(平均的そり)が検出される。そして、検出されたカンチレバーのひずみに基づいて、周波数の誤差量が検出される。
【0079】
これをさらに、共振周波数の変化に対応させて、カンチレバーのひずみの変化分だけ共振周波数の誤差を差し引いて、共振周波数の変化を補正し、正確な共振周波数の変化を計測する。
【0080】
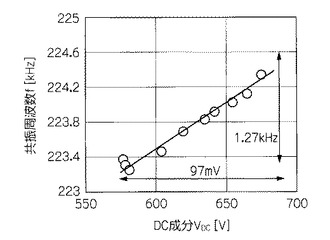
次に、DC成分から高周波数成分である共振周波数の変化を補正する方法について説明する。まず、ローパスフィルタから出力される信号のDC成分電圧とカンチレバーの共振周波数との関係は、図9に示すような関係となる。DC成分電圧と共振周波数との関係は、直線で表わすことができ、例えば、DC成分電圧が高くなるほど、共振周波数が高くなる。例えば、DC成分電圧が97mV高くなると、共振周波数が1.27kHz高くなる。すなわち、周波数の誤差量は、DC成分が高く変化するほど、比例して大きくなるため、DC成分電圧の変化ΔVDCに対する周波数の誤差量の比例係数をrとし、ハイパスフィルタから出力される信号の共振信号の周波数変化をΔfとすると、正確な周波数変化Δfcは、以下の(15)式で表わされる。
Δfc=Δf−r・ΔVDC ・・・(15)
【0081】
上記(15)式によって、ハイパスフィルタから出力される信号の共振信号の周波数の変化を、ローパスフィルタから出力される信号のDC成分電圧の変化を用いて補正することにより、正確な周波数変化を得ることができるため、カンチレバーに付着した物質の重量変化を正しく計測することができる。
【0082】
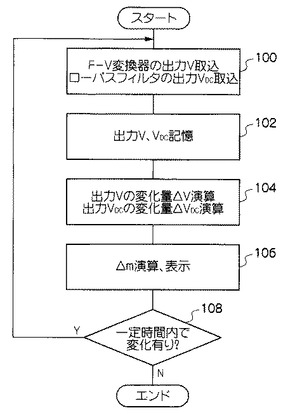
次に、コンピュータによる演算処理について図10を参照して説明する。ステップ100では、F−V変換回路22からの出力Vをアナログ信号からデジタル信号に変換して取り込むと共に、増幅回路19のローパスフィルタ19Cからの出力VDCをアナログ信号からデジタル信号に変換して取り込み、ステップ102において、取り込んだ出力V、VDCをコンピュータのメモリに記憶する。
【0083】
次のステップ104では、前回取り込んだ出力Vを今回取り込んだ出力Vとを比較し、出力の変化量ΔVを演算すると共に、前回取り込んだ出力VDCを今回取り込んだ出力VDCとを比較し、出力の変化量ΔVDCを演算する。そして、ステップ106において、カンチレバーに付着した物質の質量の変化を演算する。
【0084】
上記ステップ106では、上記ステップ104で演算されたΔVを周波数変化Δfに変換し、そして、上記ステップ104で演算されたΔVDCを用いて、誤差による周波数の変化(r・ΔVDC)を予測し、上記(15)式に基づいて、Δfを補正して、Δfcを取得する。そして、Δfcを用いて、上記(10)式に基づいて、カンチレバーに付着した物質の質量変化Δmを演算する。
【0085】
これにより、カンチレバーに付着した物質の質量の時間変化を検出することができる。また、この質量の時間変化を所定時間にわたって計測することにより、所定時間内にカンチレバーに付着した物質の総量を検出することができる。このようにして検出したカンチレバーに付着した物質の質量は、コンピュータに接続されているLCD等の表示装置に表示される。
【0086】
そして、ステップ108において、一定時間内で出力Vが変化したか否かを判定し、変化したと判断された場合には、ステップ100へ戻るが、一定時間内で出力Vの変化がなかった場合には、カンチレバーに付着する物質の質量変化がなくなったと判断し、演算処理を終了する。この他にコンピュータでは、ノイズ除去や反応速度等を処理、演算することができる。
【0087】
本実施の形態のバイオセンサを抗原抗体反応の検出に利用するには、最初に抗体をカンチレバーの表面に付着してカンチレバーを反応溶液に浸漬し、その後抗原を持つ測定試料を反応容器24の反応溶液中に投入する。これにより、アレルギー等の要因を持つ体質か否かが明らかになる。また、このような場合と逆に、最初に抗体を反応容器に入れてから抗原を投入すると、人間の体内にアレルギー物質が生成しているのが分かる。
【0088】
次に、本実施の形態の手法に関する実験結果について説明する。実験では、比較対照として、ブリッジ回路のハイパスフィルタから出力される共振信号を、F−V変換器を介してパーソナルコンピュータに入力し、共振周波数を補正しない構成のカンチレバー型バイオセンサを用意し、本実施の形態に係るローパスフィルタから出力される信号を用いて共振周波数を補正する構成のカンチレバー型バイオセンサと比較対象のカンチレバー型バイオセンサとについて、抗原を水中に滴下したときの共振周波数の変化を計測した。
【0089】
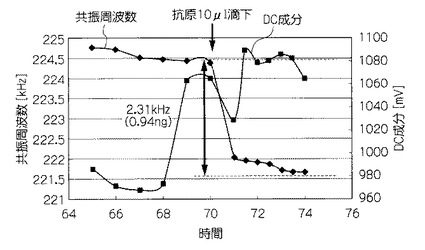
比較対象となる構成のカンチレバー型バイオセンサにおいて、抗原を水中に滴下したときの共振周波数の計測結果を図11に示す。上記図11では、抗原の滴下により、カンチレバーに物質が付着して、共振周波数が低下しており、2.31kHzだけ周波数が低下することが計測された。また、0.94ngの物質がカンチレバーに付着した。なお、ローパスフィルタによって取り出されるDC成分電圧は、抗原の滴下の前後で変化していることがわかる。
【0090】
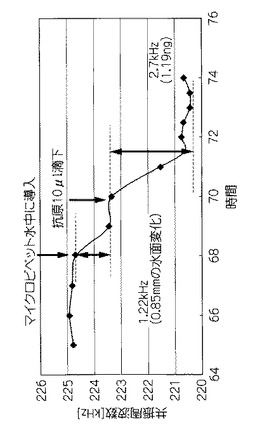
DC成分が変化しているときには、温度等が変化し、共振周波数に影響を与えている。このことより、この影響を除く必要がある。図12に補正後の結果を示す。上記図12では、補正によって、正確には、抗原の滴下により、カンチレバーに物質が付着して、共振周波数が低下しており、2.7kHzだけ周波数が低下することが分かる。また、補正により、0.94ngではなく、1.19ngの物質がカンチレバーに付着したことが分かる。
【0091】
以上の実験結果により、ローパスフィルタによって取り出されるDC成分電圧に基づいて、共振周波数の変化を補正することによって、高精度に共振周波数の変化を検出することができ、カンチレバーに付着した物質の付着量を精度よく検出することができることがわかった。
【0092】
以上説明したように、本発明の第2の実施の形態に係るカンチレバー型バイオセンサによれば、カンチレバーの振動状態の高周波数成分と付着した物質の質量とは相関があり、低周波数成分によって高周波数成分の誤差を求めることができるため、低周波数成分に基づいて高周波数成分を補正して、補正された高周波数成分に基づいて、カンチレバーに付着した物質の質量を検出することにより、高精度にカンチレバーに付着した物質の質量を検出することができる。
【0093】
従来のカンチレバー共振型バイオセンサにおいて、検出環境(温度、表面張力等)に影響され、重量検出に多くの誤差を生じていたが、本実施の形態に係るカンチレバー型バイオセンサによれば、振動信号のDC成分によって検出環境の影響因子の量(カンチレバーのゆがみ量)を計測して、誤差量を検出し、共振周波数の変化を補正することにより、高精度にカンチレバーに付着した物質の質量を検出することができる。
【0094】
また、大気中や液中でのバイオセンサや重量センサの高精度化が実現できる。
【0095】
また、カンチレバーの表面に複数の貫通孔を穿設して、分子を通り易くしたフレーム構造としたことにより、大きな粘性抵抗が発生することを防ぐことができるため、液中の中でもQ値を落とさずに、検出感度を劣化させないようにして、カンチレバーに付着した物質の質量を検出することができる。また、粘性抵抗が小さくなって、質量変化に対する周波数変化の変化量が大きくなるため、液中でも、高い検出感度でカンチレバーに付着した物質の質量を検出することができる。
【0096】
また、センサとして歪み抵抗素子をカンチレバーに埋め込むことより、光てこ方式を使用しないため、溶液中などでカンチレバー型バイオセンサを使用する際に再度光軸調整する必要がなく、簡便に使用することができる。
【0097】
また、検出回路で検出された電圧変化を示す振動信号をデジタルデータに変換し、このデジタルデータに基づいて計測対象物に関する物理量を計測することにより、検出できる電圧変化の周波数領域に制限がなく、また、電圧変化が大きくても高精度に電圧変化を検出できるため、高精度かつ広範囲に計測対象物に関する物理量を計測することができる。
【0098】
なお、本実施の形態では、カンチレバーの振動周波数を検出する場合を例に説明したが、カンチレバーの加振周波数を検出するようにしてもよい。この場合には、検出回路の後段にロックインアンプを設け、振動信号が表わす振動周波数から加振周波数を抽出するようにすればよい。
【0099】
また、カンチレバーを一つだけ設けた場合を例に説明したが、これに限定されるものではなく、複数のカンチレバーを設けて、各カンチレバーの振動周波数から、高周波成分と低周波成分とを各々検出するようにしてもよい。この場合には、複数のカンチレバーに異なる物質が付着するように構成し、同時に異なる物質の付着量を計測するようにしてもよい。また、各カンチレバーに同じ物質が付着するようにして、計測結果の各々を用いて、より高精度に物質の付着量を計測するようにしてもよい。
【0100】
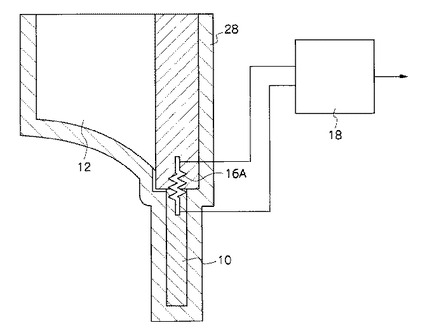
また、本実施の形態では、アクチュエータ14を圧電素子で構成した例について説明したが、本実施の形態においては図13に示すように圧電素子の電極部分の各々に絶縁皮膜28を被覆し、電気的に絶縁するようにしてもよい。この場合においても、上記と同様に、アクチュエータ14の一方の絶縁皮膜を台座12に接着または機械的に接合させてアクチュエータ14を台座12とを一体化させる。アクチュエータ14の電極が絶縁皮膜28により被覆されているため、このカンチレバー10を反応溶液に浸漬することにより直ちに計測を開始することができる。
【0101】
また、上記では、カンチレバーを溶液中に浸漬した場合を例に説明したが、計測対象物が浮遊している大気中又はガス中にカンチレバーを配置するようにしてもよい。また、真空中にカンチレバーを配置するようにしてもよい。
【0102】
また、図14に示すように、カンチレバー10及び台座12を絶縁皮膜28で被覆するようにしてもよい。この場合には、アクチュエータ14は上記図13に示したように絶縁皮膜により被覆してもよいし、被覆しないようにしてもよい。これにより、カンチレバー10を反応溶液中に浸漬したときに、カンチレバー10の表面にリーク電流が流れるのを防止し、検出回路18によって正確に電流を計測することができる。
【0103】
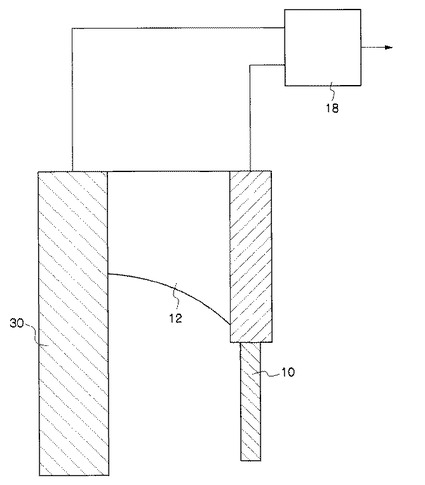
次に、本発明の第3の実施の形態について説明する。第3の実施の形態は、カンチレバーの振動状態の変化を検出するセンサとして第1の実施の形態及び第2の実施の形態の歪み抵抗素子に代えて、カンチレバーの振動に応じて静電容量が変化する静電容量素子を使用するものである。本実施の形態では、図15に示すように、カンチレバー10と台座12との接合部16には、歪み抵抗素子が設けられていない。
【0104】
また、図15に示すように、カンチレバー10と対向して平行になるように対向電極30が台座12に固定され、対向電極30により、カンチレバー10の貫通孔10Aが穿設されていない未開口部分を静電容量素子の一部とし、対向電極30とカンチレバー10の未開口部分との間に静電容量素子が構成されている。そして、カンチレバー10及び対向電極30は、上記と同様に静電容量素子と共にホイーストンブリッジを構成するブリッジ回路18Aを備えた検出回路18に接続されている。これにより、カンチレバーが振動すると静電容量素子の静電容量が周期的に変化するため、検出回路18のブリッジ回路18Aによってカンチレバーの振動を検出し、振動信号を出力することができる。
【0105】
本実施の形態によれば、検出回路18から出力される振動信号の高周波数成分(共振信号)及び低周波数成分(変形信号)の各々をハイパスフィルタ19B及びローパスフィルタ19Cの各々によって取り出し、低周波数成分によって高周波数成分を補正して、共振周波数の変化を検出する。また、この共振周波数の変化から上記と同様にカンチレバーに付着した物質の質量の時間変化等を検出することができる。または、検出回路18から出力される振動信号の低周波数成分(変形信号)をローパスフィルタ19Cによって取り出し、低周波数成分に基づいて、温度の時間変化等を検出することができる。
【0106】
次に、図16を参照して本発明の第4の実施の形態について説明する。本実施の形態は、第3の実施の形態の対向電極をアクチュエータとして使用するようにしたものである。カンチレバーの振動を検出するセンサとしては、第1の実施の形態と同様の歪み抵抗素子16Aが用いられている。
【0107】
歪み抵抗素子16Aは、第1の実施の形態と同様に、検出回路18のブリッジ回路18Aに接続されている。また、カンチレバー10の基端側は接地され、静電容量素子を構成する対向電極30は、正帰還回路20に接続されている。
【0108】
本実施の形態によれば、歪み抵抗素子16Aの電圧変化を検出回路18のブリッジ回路18Aで検出し、検出した振動信号から高周波数成分を増幅回路19のハイパスフィルタ19Bによって取り出して、正帰還回路20に入力し、対向電極30に加振信号として入力されるので、カンチレバー10が共振振動するように制御される。また、検出回路18のブリッジ回路18Aで検出された振動信号からハイパスフィルタ19Bによって取り出された高周波数成分は、F−V変換回路22を介してパーソナルコンピュータ26に入力される。また、検出回路18のブリッジ回路18Aで検出された振動信号からローパスフィルタ19Cによって取り出された低周波数数成分がパーソナルコンピュータ26に入力される。そして、パーソナルコンピュータ26において、低周波数成分に基づいて高周波数成分を補正して、共振周波数の変化を検出し、この共振周波数の変化から上記と同様にカンチレバー10に付着した物質の質量の時間変化等が検出される。または、検出回路18から出力される振動信号の低周波数成分(変形信号)をローパスフィルタ19Cによって取り出し、低周波数成分に基づいて、温度の時間変化等を検出することができる。
【0109】
次に、図17を参照して本発明の第5の実施の形態について説明する。本実施の形態は、第4の実施の形態の静電誘導アクチュエータに代えて、電磁誘導型アクチュエータを用いたものである。本実施の形態では、カンチレバー10と対向して略並行になるように電磁誘導コイル32が台座12に固定され、カンチレバー10の表面側には磁性材で構成された磁性薄膜34がコーティングされている。カンチレバーの振動を検出するセンサとしては、第1の実施の形態と同様の歪み抵抗素子16Aが用いられている。
【0110】
本実施の形態によれば、上記と同様に歪み抵抗素子16Aからの信号を検出回路18のブリッジ回路18Aで検出し、検出した振動信号から増幅回路19のハイパスフィルタ19Bによって高周波数成分(共振信号)が取り出されて正帰還回路20に入力され、電磁誘導コイル32に加振信号として入力されるので、カンチレバー10が共振振動される。また、上記と同様に、検出回路18のブリッジ回路18Aで検出された振動信号からハイパスフィルタ19Bによって取り出された高周波数成分は、F−V変換回路22を介してパーソナルコンピュータ26に入力され、また、検出回路18のブリッジ回路18Aで検出された振動信号からローパスフィルタ19Cによって取り出された低周波数数成分がパーソナルコンピュータ26に入力される。そして、パーソナルコンピュータ26において共振周波数の変化を検出し、この共振周波数の変化から上記と同様にカンチレバー10に付着した物質の質量の時間変化等が検出される。または、検出回路18から出力される振動信号の低周波数成分(変形信号)をローパスフィルタ19Cによって取り出し、低周波数成分に基づいて、温度の時間変化等を検出することができる。
【0111】
図17では片面だけにコーティングしたが、両面にコーティングしてもよく、図17と反対の面にコーティングしてもよい。
【0112】
図18は、本発明の第6の実施の形態を示すものであり、図14に示したカンチレバーの絶縁皮膜に、検出対象の物質を付着させるために、特別な化学反応基を付着させるための金等で構成された薄膜36を被覆したものである。薄膜の種類は、付着させる物質に応じて適宜選択される。これにより、チオール基等を介在して人為的に選択された蛋白質、DNA、抗体、または抗原等の計測対象物に関する物理量の時間変化等を検出することができる。
【0113】
次に、第7の実施の形態について説明する。第7の実施の形態に係るカンチレバー型バイオセンサは、図19に示すように、レーザ光を照射する半導体レーザ212と、半導体レーザ212から照射されたレーザ光であって、かつ、レンズ(図示省略)によって集光された光を反射させるための反射面を有するカンチレバー210と、カンチレバー210の反射面で反射されたレーザ光を入射させるように設けられたフォトダイオード等で構成された位置検出器214とを備えており、光てこを利用して小さなカンチレバー210の共振周波数の変化を検出し、物理量、化学量、温度、または応力等を検出する。
【0114】
また、カンチレバー型バイオセンサは、台座215を加振することによりカンチレバー210を振動させる圧電素子で構成されたアクチュエータ216と、カンチレバー210の振動状態の変化を検出するための検出回路218と、検出回路218から出力された振動信号を増幅すると共に、高周波数成分と低周波数成分とを取り出す増幅回路219と、アクチュエータ216を駆動してカンチレバー210を共振させるための正帰還回路220、周波数を電圧に変換するF−V変換回路(FM復調回路)222と、データ処理及び表示を行なうパーソナルコンピュータ226とを備えている。
【0115】
また、図20に示すように、カンチレバー210は、貫通孔10Aが穿設されていない未開口部分を反射面としている。なお、カンチレバー210の反射面は平坦である。
【0116】
本実施の形態によれば、半導体レーザ212からレーザ光をカンチレバー210の反射面に照射し、カンチレバー210からの反射光を位置検出器214に入射し、位置検出器214から出力される信号に基づいて、検出回路218において振動信号を検出する。そして、振動信号から高周波数成分及び低周波数成分を取り出して、振動信号の高周波数成分及び低周波数成分に基づいて、共振周波数の変化を検出し、この共振周波数の変化から上記と同様にカンチレバーに付着した物質の質量の時間変化等を検出することができる。または、検出回路218から出力される振動信号の低周波数成分(変形信号)をローパスフィルタによって取り出し、低周波数成分に基づいて、温度の時間変化等を検出することができる。
【0117】
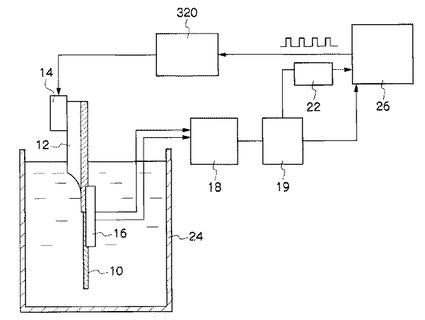
次に、第8の実施の形態について説明する。なお、第1の実施の形態と同様の構成については、同一符号を付して説明を省略する。第8の実施の形態に係るカンチレバー型バイオセンサは、図21に示すように、カンチレバー10、台座12、アクチュエータ14、接合部16、検出回路18、増幅回路19、F−V変換回路22、パーソナルコンピュータ26、及びアクチュエータ14に接続され、かつ、アクチュエータ14へ発振信号を出力することにより、アクチュエータ14を振動させる加振回路320を備えている。
【0118】
パーソナルコンピュータ26は、加振回路320に接続されており、加振回路320が発振信号を出力するように制御する。アクチュエータ14をインパルス加振させるためのインパルス加振制御信号を加振回路320へ出力し、加振回路320からインパルス加振させるための加振信号をアクチュエータ14に入力させる。これによってカンチレバー10をカンチレバーの厚み方向に加振させる。
【0119】
また、パーソナルコンピュータ26は、カンチレバー10が共振周波数で振動されるように、インパルス加振制御信号を加振回路320に出力し、カンチレバー10を共振周波数で振動させる。
【0120】
そして、カンチレバー10を共振周波数で振動させた状態において、パーソナルコンピュータ26は、検出回路18から出力される振動信号の高周波数成分(共振信号)及び低周波数成分(変形信号)から、共振周波数の変化を検出し、この共振周波数の変化から上記と同様にカンチレバーに付着した物質の質量の時間変化等を検出することができる。または、検出回路18から出力される振動信号の低周波数成分(変形信号)をローパスフィルタ19Cによって取り出し、低周波数成分に基づいて、温度の時間変化等を検出することができる。
【0121】
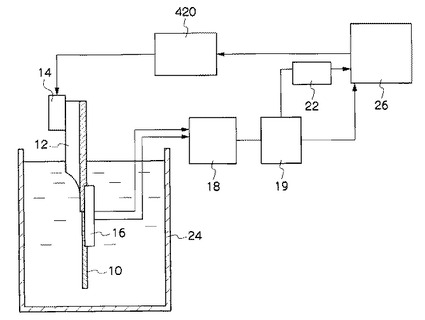
次に、第9の実施の形態について説明する。なお、第1の実施の形態と同様の構成については、同一符号を付して説明を省略する。第9の実施の形態に係るカンチレバー型バイオセンサは、図22に示すように、カンチレバー10、台座12、アクチュエータ14、接合部16、検出回路18、増幅回路19、F−V変換回路22、パーソナルコンピュータ26、及びアクチュエータ14に接続され、かつ、振動周波数を徐々に変更しながらアクチュエータ14へ発振信号を出力して、アクチュエータ14を振動させる振動周波数制御回路420を備えている。
【0122】
パーソナルコンピュータ26は、振動周波数制御回路420に接続されており、振動周波数制御回路420が出力する発振信号の振動周波数の変化を制御する。振動周波数を徐々に変更しながらアクチュエータ14を振動させるための周波数制御開始信号を振動周波数制御回路420へ出力し、振動周波数制御回路420から振動周波数を徐々に変更しながら、発振信号をアクチュエータ14に入力させる。これによって、振動周波数を徐々に変更しながら、カンチレバー10をカンチレバーの厚み方向に加振させる。
【0123】
また、パーソナルコンピュータ26は、カンチレバー10が共振周波数で振動している状態であると判断すると、振動周波数の変更を停止させる周波数制御停止信号を振動周波数制御回路420へ出力し、カンチレバー10を共振周波数で振動させた状態を維持させる。
【0124】
そして、カンチレバー10を共振周波数で振動させた状態において、パーソナルコンピュータ26は、検出回路18から出力される振動信号の高周波数成分(共振信号)及び低周波数成分(変形信号)から、共振周波数の変化を検出し、この共振周波数の変化から上記と同様にカンチレバーに付着した物質の質量の時間変化等を検出することができる。または、検出回路18から出力される振動信号の低周波数成分(変形信号)をローパスフィルタ19Cによって取り出し、低周波数成分に基づいて、温度の時間変化等を検出することができる。
【0125】
なお、上記の実施の形態では、自己検知素子として、歪み抵抗素子または静電容量素子を用いた例について説明したが、圧電素子、電磁誘導素子、または温度検知素子等を用いるようにしてもよい。また、アクチュエータとしても圧電素子、静電駆動の静電容量素子に代えて、温度駆動のアクチュエータ、または光駆動のアクチュエータ等を用いるようにしてもよい。さらに、カンチレバーを絶縁皮膜で被覆した例について説明したが、自然酸化膜で覆うようにしてもよい。
【図面の簡単な説明】
【0126】
【図1】本発明の第1の実施の形態に係るカンチレバー型センサの構成を示す概略図である。
【図2】本発明の第1の実施の形態に係る検出回路及び増幅回路の構成を示す概略図である。
【図3】(A)本発明の第1の実施の形態に係るカンチレバー及び台座の構成を示す図、及び(B)カンチレバーの構成を示す図である。
【図4】温度変化によってカンチレバーのばね定数が変化する様子を示すイメージ図である。
【図5】(A)初期状態におけるカンチレバーが共振しているときの歪み抵抗素子の抵抗を説明するための図、及び(B)温度変化後におけるカンチレバーが共振しているときの歪み抵抗素子の抵抗を説明するための図である。
【図6】初期状態においてブリッジ回路から出力される振動信号を説明するための回路図である。
【図7】温度変化後においてブリッジ回路から出力される振動信号を説明するための回路図である。
【図8】振動信号のDC成分電圧と水温との関係を示すグラフである。
【図9】振動信号のDC成分電圧と共振周波数との関係を示すグラフである。
【図10】本発明の第2の実施の形態のカンチレバーに付着した物質を検出する処理ルーチンを示すフローチャートである。
【図11】比較対象となるカンチレバー型バイオセンサの実験結果を示すグラフである。
【図12】本発明の第2の実施の形態に係るカンチレバー型バイオセンサの実験結果を示すグラフである。
【図13】本発明の第2の実施の形態の変形例を示す概略図である。
【図14】本発明の第2の実施の形態の他の変形例を示す概略図である。
【図15】本発明の第3の実施の形態に係るカンチレバー型バイオセンサの構成を示す概略図である。
【図16】本発明の第4の実施の形態に係るカンチレバー型バイオセンサの構成を示す概略図である。
【図17】本発明の第5の実施の形態に係るカンチレバー型バイオセンサの構成を示す概略図である。
【図18】本発明の第6の実施の形態に係るカンチレバー型バイオセンサの構成を示す概略図である。
【図19】本発明の第7の実施の形態に係るカンチレバー型バイオセンサの構成を示す概略図である。
【図20】本発明の第7の実施の形態に係るカンチレバーの構成を示す図である。
【図21】本発明の第8の実施の形態に係るカンチレバー型バイオセンサの構成を示す概略図である。
【図22】本発明の第9の実施の形態に係るカンチレバー型バイオセンサの構成を示す概略図である。
【符号の説明】
【0127】
10、210 カンチレバー
12、215 台座
14、216 アクチュエータ
16A 歪み抵抗素子
18、218 検出回路
18A ブリッジ回路
19、219 増幅回路
19B ハイパスフィルタ
19C ローパスフィルタ
20、220 正帰還回路
22 F−V変換回路
26、226 パーソナルコンピュータ
212 半導体レーザ
214 位置検出器
320 加振回路
420 振動周波数制御回路
【技術分野】
【0001】
本発明は、カンチレバー型センサに係り、特に、片持ち張り(カンチレバー)を用いて物理量を高精度に検出することができるカンチレバー型センサに関する。
【背景技術】
【0002】
原子間力電子顕微鏡で用いられているカンチレバーは、共振点を持ち、外部から受ける力により共振点がシフトすることを利用して微小な力であるpN(ピコニュートン)単位の力を計測できるセンサとして利用されている。
【0003】
カンチレバーをバイオセンサとして利用した論文としては、ラング等が発表したセンサ(非特許文献1)が知られている。
【0004】
このカンチレバー型センサは、光てこを利用して小さなカンチレバーの共振周波数の変化を検出し、物理量、化学量、温度、または応力等を検出するセンサである。
【非特許文献1】”人工ノーズ”(アナリティカ ケミカ アクタ Analytica Chamica Acta 第393巻(1999年)59頁)
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、従来のカンチレバー型センサでは、検出環境に影響されて、多くの誤差が生じるため、精度よく物理量を検出することができない、という問題がある。
【0006】
本発明は、上記問題を解決するためになされたもので、高精度に物理量を検出することができるカンチレバー型センサを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の目的を達成するために本発明に係るカンチレバー型センサは、カンチレバーと、前記カンチレバーを振動させるアクチュエータと、前記カンチレバーの振動状態を検出する振動検出手段と、前記カンチレバーが共振するように前記アクチュエータを制御する制御手段と、前記カンチレバーが共振するように制御されている状態で、前記振動検出手段で検出された前記振動状態の低周波数成分、又は前記低周波数成分及び高周波数成分に基づいて、物理量を検出する物理量検出手段とを含んで構成されている。
【0008】
本発明に係るカンチレバー型センサによれば、カンチレバーが共振するように制御されている状態で、物理量が変化するとカンチレバーの共振周波数等の振動状態が変化する。この振動状態の低周波数成分、又は振動状態の低周波数成分及び高周波数成分の変化と、物理量とは相関があるため、振動検出手段で検出された振動状態の低周波数成分、又は低周波数成分及び高周波数成分に基づいて、物理量を検出することができる。
【0009】
このように、カンチレバーの振動状態の低周波数成分、又は低周波数成分及び高周波数成分に基づいて、物理量を検出することにより、高精度に物理量を検出することができる。
【0010】
ここで、振動状態は、振動していない状態を含む状態を示しており、また、高周波数成分は、共振周波数又は加振周波数を含んだ周波数成分である。
【0011】
本発明に係る制御手段は、振動検出手段で検出された振動状態に基づいて、カンチレバーが共振するようにアクチュエータを制御することができる。これによって、カンチレバーが共振するように制御することができる。
【0012】
本発明に係る制御手段は、アクチュエータを制御して、カンチレバーをパルス加振させることができる。これによって、カンチレバーの共振周波数で、カンチレバーが共振するように加振制御することができる。
【0013】
本発明に係る制御手段は、アクチュエータを制御して、カンチレバーが共振するように、カンチレバーの加振周波数を変化させることができる。これによって、カンチレバーの共振周波数で、カンチレバーが共振するように制御することができる。
【0014】
また、本発明に係る物理量検出手段は、振動検出手段で検出された振動状態の低周波数成分に基づいて、温度を物理量として検出することができる。これによって、カンチレバーの振動状態の低周波数成分と温度とは相関があるため、低周波数成分に基づいて、高精度に温度を検出することができる。
【0015】
また、上記の物理量検出手段は、振動状態の低周波数成分と温度との予め定められた関係に基づいて、振動検出手段で検出された振動状態の低周波数成分に応じた温度を検出することができる。
【0016】
本発明に係る物理量検出手段は、低周波数成分に基づいて高周波数成分の変化を予測し、予測された高周波数成分の変化より高周波数成分を補正することにより、カンチレバーに付着した物質の付着量を物理量として検出することができる。これによって、カンチレバーの振動状態の高周波数成分と付着量とは相関があり、低周波数成分によって高周波数成分に混入した誤差を求めることができるため、低周波数成分に基づいて高周波数成分の変化を予測して高周波数成分を補正し、補正された高周波数成分に基づいて、カンチレバーに付着した物質の付着量を高精度に検出することができる。
【0017】
ここで、上記の高周波数成分には、カンチレバーの共振周波数が含まれている。これによって、共振周波数とカンチレバーに付着した物質の付着量とは相関があるため、共振周波数を含む高周波数成分に基づいて、カンチレバーに付着した物質の付着量を検出することができる。
【0018】
上記の振動検出手段を、カンチレバーの振動状態を検出するようにカンチレバーに設けられたセンサで構成することができる。これによって、センサがカンチレバーに設けられているので自己検知型であり、このため、バイオセンサを使用する際に再度調整する必要がなく、簡便に使用することができる。
【0019】
上記のカンチレバーに設けられたセンサを、カンチレバーの振動に応じて抵抗が変化する歪み抵抗素子を含んで構成することができる。
【0020】
上記のカンチレバーに設けられたセンサを、歪み抵抗素子、及び歪み抵抗素子の抵抗の変化によって振動状態を検出するためのブリッジ回路を含んで構成することができる。
【0021】
また、上記のカンチレバーを、液中に浸漬するか、ガス中に配置するか、真空中に配置するか、又は大気中に配置して使用することができる。
【0022】
上記の物理量検出手段は、カンチレバーの反りを検出する反り検出手段を有することができる。これによって、カンチレバーの反りに基づいて、物理量を検出することができる。
【0023】
また、カンチレバーの表面を、金属、絶縁物、有機物、抗原、抗体、及びDNAの少なくとも一つで被覆することができる。
【0024】
また、上記のカンチレバー型センサは、カンチレバーを複数有することができる。これによって、複数のカンチレバーの各々について、物理量を検出することができる。
【発明の効果】
【0025】
以上説明したように、本発明のカンチレバー型センサによれば、カンチレバーの振動状態の低周波数成分、又は低周波数成分及び高周波数成分に基づいて、物理量を検出することにより、高精度に物理量を検出することができる、という効果が得られる。
【発明を実施するための最良の形態】
【0026】
以下、本発明の実施の形態について図面を参照して説明する。図1に示すように、本発明の第1の実施の形態に係るカンチレバー型バイオセンサは、基板としての台座12に支持された薄板状のカンチレバー10を備えている。
【0027】
台座12には、台座12を加振することによりカンチレバー10を振動させる圧電素子で構成されたアクチュエータ14が取り付けられている。アクチュエータ14は、台座12に接着又は機械的に接合させて、台座12と一体化するように取り付けられている。また、アクチュエータ14を取り付ける位置は、カンチレバー10をカンチレバー10の厚み方向に振動させることができる位置であればよく、図示したように台座12のカンチレバーが形成されていない側、又はカンチレバーが形成されている側に取り付けられる。
【0028】
また、カンチレバー10の台座12との接合部16には、自己検知型のセンサである歪み抵抗素子16Aが埋め込まれている。アクチュエータ14によりカンチレバー10を厚み方向に振動させることにより、カンチレバー10の台座12との接合部16に引張り及び圧縮応力が生じて、歪み抵抗素子16Aの抵抗値が変化し、また、歪み抵抗素子16Aの抵抗は、カンチレバー10の位置情報を表わすため、歪み抵抗素子16Aの抵抗に基づいて、カンチレバー10の位置情報を検出することができ、位置情報の変化(抵抗値の変化)から、カンチレバー10の振動状態を検出することができる。
【0029】
カンチレバー10は、シリコン、SiN、SiO2等で形成された半導体基板を台座12に相当する部分を残存させて薄板状にエッチングすることにより、台座12と一体的に形成することができる。また、歪み抵抗素子16Aについては、カンチレバー10の台座12との接合部16に、半導体技術で一対の電極が形成されており、ボロン等の不純物原子を電極間にイオン打ち込みすることにより歪み抵抗パターンが形成されて作成されている。歪み抵抗の抵抗値は、2kΩ以下が望ましい。なお、カンチレバー10と台座12とは、シリコン基板で形成することが好ましいが、イオン打ち込みすることなく、既存の歪み抵抗素子を貼着するようにしてもよい。
【0030】
歪み抵抗素子16Aの電極には、歪み抵抗素子16Aの抵抗値の変化を検出するための検出回路18が接続されている。図2に示すように、検出回路18は、歪み抵抗素子16Aの電極が接続されたホイーストンブリッジを構成するブリッジ回路18A、及びブリッジ回路に電圧を印加する電源18Bを備えており、カンチレバー10の振動状態に応じた歪み抵抗素子16Aの抵抗変化を電圧変化として検出し、検出した振動信号を出力する。
【0031】
この検出回路18には、検出回路18から出力された信号を増幅すると共に、増幅した信号から高周波数成分と低周波数成分とを取り出す増幅回路19とが接続されている。増幅回路19は、信号を増幅するためのアンプ19Aと、増幅された信号の高周波数成分を取り出すためのハイパスフィルタ19Bと、増幅された信号の低周波数成分を取り出すためのローパスフィルタ19Cとを備えており、カンチレバー10が共振している状態では、ハイパスフィルタ19Bによって高周波数成分として共振信号が取り出される。また、ローパスフィルタ19Cは、低周波数成分としてDC成分の信号が取り出される。
【0032】
この増幅回路19のハイパスフィルタ19Bの出力端は、アクチュエータ14を駆動してカンチレバー10を共振させるための正帰還回路20、及び周波数を電圧に変換するF−V変換回路(FM復調回路)22に接続されている。F−V変換回路22は、増幅回路19のハイパスフィルタ19Bから出力される共振信号の周波数を電圧Vに変換して出力する。
【0033】
F−V変換回路22には、データ処理及び表示を行なうパーソナルコンピュータ26が接続されている。また、増幅回路19のローパスフィルタ19Cの出力端は、パーソナルコンピュータ26に接続されている。
【0034】
パーソナルコンピュータ26は、一般的なパーソナルコンピュータの構成であり、CPU、ROM、RAM、ハードディスク、ディスプレイ等を備えており、F−V変換回路22及び増幅回路19のローパスフィルタ19Cから入力されたデータをハードディスクに保存し、また、保存したデータに基づいて所定のデータ処理を行う。
【0035】
以下、本実施の形態のカンチレバー10の構成について図3を用いて説明する。図3(A)に示すように、台座12の先端にカンチレバー10の一端が支持されて取り付けられており、また、台座12の中には、2つの電極12A、12Bが形成されている。また、図3(B)に示すように、2つの電極12A、12Bは、接合部16で接続されている。また、カンチレバー10の表面には、表面に開口し、かつ、カンチレバー10の厚さ方向に貫通する複数の貫通孔10Aを穿設されている。貫通孔10Aの開口部は、各々矩形状のフレーム構造となっており、一辺が3μm〜6μmの大きさとなっている。粘性抵抗を小さくするために、分子の移動をスムーズにするとよいことから、開口面積をできるだけ大きくするために、複数の貫通孔10Aを穿設する。また、物質が付着する部分の面積を増やすために、カンチレバー10の表面積ができるだけ大きくなるように構成するとよい。
【0036】
次に、本実施の形態のカンチレバー型センサで温度を検出するための原理について説明する。製作時のエッチングや蒸着により、カンチレバーはひずみを持っており、カンチレバーのそりは、以下の(1)式で表わされる。
【0037】
【数1】
【0038】
ここで、kはバネ定数、F(x)はひずみによる力、xはそりの変位である。
【0039】
カンチレバーを微小化すると、カンチレバーはひずみを持ち、温度によってひずみが変化する。例えば、図4に示すように、温度上昇により、カンチレバーがリラックスするようにカンチレバーが変形し、ひずみが少なくなり、そりの変位が小さくなる方向に変化する。また、見かけ上のバネ定数が、減少する。このように、温度によってバネ定数が変化するため、カンチレバーが温度センサとして機能する。
【0040】
また、図5に示すように、温度が変化すると、カンチレバーのひずみが変化するため、歪み抵抗素子の抵抗が変化する。例えば、振動していない初期状態における歪み抵抗素子の抵抗をR1とし、カンチレバーの共振による抵抗変化をΔRとすると、ひずみが変形する前の初期状態における歪み抵抗素子の抵抗は、(R1+ΔR)である(図5(A)参照)。このとき、ブリッジ回路から出力される振動信号Vは、以下の(2)式で表わされる(図6参照)。
【0041】
【数2】
【0042】
ここで、Eは検出回路の電源の電圧であり、Rはブリッジ回路の抵抗の和であり、以下の(3)式で表わされる。
R=R1+R2+R3+R4 ・・・(3)
【0043】
また、温度が変化し、カンチレバーのひずみが変形した後については、ひずみの変形による歪み抵抗素子の抵抗変化をRsとし、温度変化後におけるカンチレバーの共振による抵抗変化をΔR´とすると、歪み抵抗素子の抵抗は、(R1+ΔR´+Rs)となる(図5(B)参照)。このとき、ブリッジ回路から出力される振動信号Vは、以下の(4)式で表わされる(図7参照)。
【0044】
【数3】
【0045】
上記(2)式で表わされる振動信号は、共振信号である。一方、上記(4)式で表わされる振動信号の第1項は、共振信号を表わし、第2項は、ひずみの変形による歪み抵抗素子の抵抗変化に応じた電圧変化を示す変形信号を表わしている。従って、温度が変化する前には、ハイパスフィルタから上記(2)式で表わされる共振信号が出力される。一方、温度が変化した後には、ハイパスフィルタから上記(4)式の第1項で表わされる共振信号が出力され、ローパスフィルタから上記(4)式の第2項で表わされる変形信号が出力される。
【0046】
また、ローパスフィルタから出力される変形信号は、ブリッジ回路から出力される振動信号のDC成分電圧VDCであり、カンチレバーを水中に浸漬けした場合には、このDC成分電圧VDCと水温との関係は、図8に示すような関係となる。
【0047】
上記図8に示すように、DC成分電圧VDCが高くなるほど、水温Tが低下し、DC成分電圧VDCが低くなるほど、水温Tが上昇する。例えば、DC成分電圧VDCが104mV低下すると、水温Tが1.4℃上昇する。従って、増幅回路のローパスフィルタからの出力であるDC成分電圧の変化によって、水温の変化を検出することができる。
【0048】
以下、本実施の形態のカンチレバー型センサを用いた温度の検出方法について説明する。正帰還回路20から加振信号がアクチュエータ14に入力されると、アクチュエータ14によって、台座12が加振され、これによってカンチレバー10がカンチレバーの厚み方向に加振される。容器24中の反応溶液にカンチレバー10を浸漬すると、カンチレバー10に反応溶液が付着すると共に反応溶液の粘性の影響によってカンチレバー10の振動数が若干減少する。しかしながら、このとき種々の振動モードが発生するので、カンチレバー10は当初の共振周波数とは異なる周波数で共振する。このときのカンチレバー10と台座12との動きが一体ではないので、歪み抵抗素子16Aに引張り及び圧縮応力が発生し、歪み抵抗素子16Aの抵抗が変化するため、歪み抵抗素子16Aに一定電圧を印加していると、電流がカンチレバー10の振動に応じて変化する。この電流変化を検出回路18のブリッジ回路18Aで電圧変化として検出することにより、カンチレバー10の振動状態としての振動周波数を検出することができる。
【0049】
また、増幅回路19のハイパスフィルタ19Bによって、ブリッジ回路18Aから出力されるカンチレバー10の振動状態を示す振動信号のうち、高周波数成分である共振信号を取り出す。このハイパスフィルタ19Bによって取り出された共振信号の電圧変化は、正帰還回路20で増幅され、位相が揃えられ、アクチュエータ14に入力される。これによって、カンチレバー10は共振周波数で振動される。
【0050】
また、増幅回路19のローパスフィルタ19Cによって、ブリッジ回路18Aから出力される振動信号のうち、低周波成分としてのDC成分である変形信号(カンチレバー10の反りを表わす信号)を取り出す。このローパスフィルタ19Cによって取り出された変形信号の電圧は、パーソナルコンピュータ26に入力される。
【0051】
そして、パーソナルコンピュータ26は、ローパスフィルタ19Cによって取り出されたアナログ信号をデジタル信号に変換して取り込み、上述した図8の温度とDC成分電圧との予め定められた関係に基づいて、取り込んだ信号の電圧の変化に応じた温度の時間変化を検出する。また、この温度の時間変化を所定時間にわたって積算することにより、所定時間内に変化した温度を検出することができる。
【0052】
このようにして検出した温度変化は、パーソナルコンピュータ26に接続されているLCD等の表示装置に表示される。
【0053】
以上説明したように、第1の実施の形態に係るカンチレバー型センサによれば、カンチレバーの振動状態の低周波数成分と温度とは相関があるため、カンチレバーの振動状態を示す振動信号の低周波数成分に基づいて、温度を検出することにより、高精度に温度を検出することができる。
【0054】
従来の温度センサには熱電対、水晶発振器などが用いられているが、小型、高感度の点で問題があり、温度測定素子が大きい場合、熱伝導により微小部の熱がセンサに移動し、正確な温度が計測できないという欠点があったが、本実施の形態に係るカンチレバー型センサによれば、素子のボリュームの問題を解消することができ、高感度で小型な温度センサを実現することができる。
【0055】
なお、本実施の形態では、DC成分電圧の変化から温度の変化を検出する場合を例に説明したが、DC成分電圧の変化から温度を検量するための予め定められた検量曲線に基づいて、DC成分電圧の変化に応じた温度を求めるようにしてもよい。
【0056】
次に、第2の実施の形態に係るカンチレバー型バイオセンサについて説明する。なお、第2の実施の形態に係るカンチレバー型バイオセンサは、第1の実施の形態と同様の構成であるため、同一符号を付して説明を省略する。
【0057】
第2の実施の形態では、ハイパスフィルタから出力される共振信号及びローパスフィルタから出力される変形信号に基づいて、カンチレバーに付着した物質の付着量を検出している点が第1の実施の形態と異なっている。
【0058】
第2の実施の形態に係るカンチレバー型バイオセンサは、パーソナルコンピュータ26において、F−V変換回路22及び増幅回路19のローパスフィルタ19Cの各々からデータを取り込んで、取り込んだデータに対して所定の計算処理を行うことにより、カンチレバーに付着した物質の付着量を検出する。
【0059】
次に、本実施の形態のカンチレバーに付着した物質の質量を検出するための原理について説明する。カンチレバーは、外力が加わると撓み、共振している状態で質量が変化すると共振周波数が変化する。カンチレバーの動作は以下の(6)式の運動方程式で表すことができる。
【0060】
【数4】
ここで、mはカンチレバーの有効質量、aはカンチレバーが浸漬されている液体等の粘性係数、kはカンチレバーのバネ定数、Asinωtはアクチュエータの励振力、F(x)はアクチュエータへの外力、xはカンチレバーの変位である。また、F(x)は力勾配F´と変位xとの積で表されるので、以下の(7)式で表わすことができる。
【0061】
【数5】
【0062】
また、一般式は、以下の(8)式で表すことができる。
【0063】
【数6】
【0064】
また、上記(6)式より、a及びF´が小さく無視できるとすると、カンチレバーの共振周波数f0は、カンチレバーの有効質量m及びばね定数kを用いて以下の(9)式で表わされる。
【0065】
【数7】
【0066】
ここで、カンチレバーが共振周波数f0で共振している状態で、カンチレバーの質量がΔm増加すると、上記(9)式は、周波数の変化Δfを用いて、以下の(10)式のように表される。
【0067】
【数8】
【0068】
したがって、上記(10)式より、カンチレバーの共振周波数の変化を検出することにより、カンチレバーの質量の変化、すなわちカンチレバーに付着した物質の質量を検出することができる。周波数の変化を1Hz以下の精度で計測できることから、上記(10)式ではピコグラムまたはフェムトグラムでカンチレバーの質量の変化が計測できることを意味する。例えば、共振周波数f0を100kHz、カンチレバーの有効質量mを10ngとすると、約1pg/Hzの感度でカンチレバーに付着した物質の質量を検出することができる。
【0069】
ここで、大気中測定と水中測定とでは粘性係数aが変化することを考慮する必要があるため、以下に説明するように、粘性を考慮する場合(水中の場合)の周波数変化Δfを解析する。
【0070】
粘性係数aを考慮し、aが0でない場合には、上記(8)式より、共振周波数fは以下の(11)式で表わされる。
【0071】
【数9】
【0072】
上記(11)式を、m、kで全微分すると、共振周波数の変化Δfが以下の(12)式が表わされる。
【0073】
【数10】
【0074】
また、Δm=0とすると、上記(12)式より、共振周波数の変化Δf2が以下の(13)式で表わされる。
【0075】
【数11】
【0076】
一方、バネ定数の変化を無視すると、Δk=0となるため、上記(12)式より、共振周波数の変化Δf1は、以下の(14)式で表わされる。
【0077】
【数12】
【0078】
上記(14)式より、粘性aの変化や、温度等の変化による内部のひずみ量(力勾配F´)の変化によって、周波数変動が起こる。粘性aに関しては、非常に変化が少ないので無視できる。一方、温度等の変化は、カンチレバーのひずみから測定できる。また、ひずみは、共振周波数より非常に低い周波数で変化をするものであるから、共振周波数の低周波数成分であるDC成分に基づいて、カンチレバーのひずみ(平均的そり)が検出される。そして、検出されたカンチレバーのひずみに基づいて、周波数の誤差量が検出される。
【0079】
これをさらに、共振周波数の変化に対応させて、カンチレバーのひずみの変化分だけ共振周波数の誤差を差し引いて、共振周波数の変化を補正し、正確な共振周波数の変化を計測する。
【0080】
次に、DC成分から高周波数成分である共振周波数の変化を補正する方法について説明する。まず、ローパスフィルタから出力される信号のDC成分電圧とカンチレバーの共振周波数との関係は、図9に示すような関係となる。DC成分電圧と共振周波数との関係は、直線で表わすことができ、例えば、DC成分電圧が高くなるほど、共振周波数が高くなる。例えば、DC成分電圧が97mV高くなると、共振周波数が1.27kHz高くなる。すなわち、周波数の誤差量は、DC成分が高く変化するほど、比例して大きくなるため、DC成分電圧の変化ΔVDCに対する周波数の誤差量の比例係数をrとし、ハイパスフィルタから出力される信号の共振信号の周波数変化をΔfとすると、正確な周波数変化Δfcは、以下の(15)式で表わされる。
Δfc=Δf−r・ΔVDC ・・・(15)
【0081】
上記(15)式によって、ハイパスフィルタから出力される信号の共振信号の周波数の変化を、ローパスフィルタから出力される信号のDC成分電圧の変化を用いて補正することにより、正確な周波数変化を得ることができるため、カンチレバーに付着した物質の重量変化を正しく計測することができる。
【0082】
次に、コンピュータによる演算処理について図10を参照して説明する。ステップ100では、F−V変換回路22からの出力Vをアナログ信号からデジタル信号に変換して取り込むと共に、増幅回路19のローパスフィルタ19Cからの出力VDCをアナログ信号からデジタル信号に変換して取り込み、ステップ102において、取り込んだ出力V、VDCをコンピュータのメモリに記憶する。
【0083】
次のステップ104では、前回取り込んだ出力Vを今回取り込んだ出力Vとを比較し、出力の変化量ΔVを演算すると共に、前回取り込んだ出力VDCを今回取り込んだ出力VDCとを比較し、出力の変化量ΔVDCを演算する。そして、ステップ106において、カンチレバーに付着した物質の質量の変化を演算する。
【0084】
上記ステップ106では、上記ステップ104で演算されたΔVを周波数変化Δfに変換し、そして、上記ステップ104で演算されたΔVDCを用いて、誤差による周波数の変化(r・ΔVDC)を予測し、上記(15)式に基づいて、Δfを補正して、Δfcを取得する。そして、Δfcを用いて、上記(10)式に基づいて、カンチレバーに付着した物質の質量変化Δmを演算する。
【0085】
これにより、カンチレバーに付着した物質の質量の時間変化を検出することができる。また、この質量の時間変化を所定時間にわたって計測することにより、所定時間内にカンチレバーに付着した物質の総量を検出することができる。このようにして検出したカンチレバーに付着した物質の質量は、コンピュータに接続されているLCD等の表示装置に表示される。
【0086】
そして、ステップ108において、一定時間内で出力Vが変化したか否かを判定し、変化したと判断された場合には、ステップ100へ戻るが、一定時間内で出力Vの変化がなかった場合には、カンチレバーに付着する物質の質量変化がなくなったと判断し、演算処理を終了する。この他にコンピュータでは、ノイズ除去や反応速度等を処理、演算することができる。
【0087】
本実施の形態のバイオセンサを抗原抗体反応の検出に利用するには、最初に抗体をカンチレバーの表面に付着してカンチレバーを反応溶液に浸漬し、その後抗原を持つ測定試料を反応容器24の反応溶液中に投入する。これにより、アレルギー等の要因を持つ体質か否かが明らかになる。また、このような場合と逆に、最初に抗体を反応容器に入れてから抗原を投入すると、人間の体内にアレルギー物質が生成しているのが分かる。
【0088】
次に、本実施の形態の手法に関する実験結果について説明する。実験では、比較対照として、ブリッジ回路のハイパスフィルタから出力される共振信号を、F−V変換器を介してパーソナルコンピュータに入力し、共振周波数を補正しない構成のカンチレバー型バイオセンサを用意し、本実施の形態に係るローパスフィルタから出力される信号を用いて共振周波数を補正する構成のカンチレバー型バイオセンサと比較対象のカンチレバー型バイオセンサとについて、抗原を水中に滴下したときの共振周波数の変化を計測した。
【0089】
比較対象となる構成のカンチレバー型バイオセンサにおいて、抗原を水中に滴下したときの共振周波数の計測結果を図11に示す。上記図11では、抗原の滴下により、カンチレバーに物質が付着して、共振周波数が低下しており、2.31kHzだけ周波数が低下することが計測された。また、0.94ngの物質がカンチレバーに付着した。なお、ローパスフィルタによって取り出されるDC成分電圧は、抗原の滴下の前後で変化していることがわかる。
【0090】
DC成分が変化しているときには、温度等が変化し、共振周波数に影響を与えている。このことより、この影響を除く必要がある。図12に補正後の結果を示す。上記図12では、補正によって、正確には、抗原の滴下により、カンチレバーに物質が付着して、共振周波数が低下しており、2.7kHzだけ周波数が低下することが分かる。また、補正により、0.94ngではなく、1.19ngの物質がカンチレバーに付着したことが分かる。
【0091】
以上の実験結果により、ローパスフィルタによって取り出されるDC成分電圧に基づいて、共振周波数の変化を補正することによって、高精度に共振周波数の変化を検出することができ、カンチレバーに付着した物質の付着量を精度よく検出することができることがわかった。
【0092】
以上説明したように、本発明の第2の実施の形態に係るカンチレバー型バイオセンサによれば、カンチレバーの振動状態の高周波数成分と付着した物質の質量とは相関があり、低周波数成分によって高周波数成分の誤差を求めることができるため、低周波数成分に基づいて高周波数成分を補正して、補正された高周波数成分に基づいて、カンチレバーに付着した物質の質量を検出することにより、高精度にカンチレバーに付着した物質の質量を検出することができる。
【0093】
従来のカンチレバー共振型バイオセンサにおいて、検出環境(温度、表面張力等)に影響され、重量検出に多くの誤差を生じていたが、本実施の形態に係るカンチレバー型バイオセンサによれば、振動信号のDC成分によって検出環境の影響因子の量(カンチレバーのゆがみ量)を計測して、誤差量を検出し、共振周波数の変化を補正することにより、高精度にカンチレバーに付着した物質の質量を検出することができる。
【0094】
また、大気中や液中でのバイオセンサや重量センサの高精度化が実現できる。
【0095】
また、カンチレバーの表面に複数の貫通孔を穿設して、分子を通り易くしたフレーム構造としたことにより、大きな粘性抵抗が発生することを防ぐことができるため、液中の中でもQ値を落とさずに、検出感度を劣化させないようにして、カンチレバーに付着した物質の質量を検出することができる。また、粘性抵抗が小さくなって、質量変化に対する周波数変化の変化量が大きくなるため、液中でも、高い検出感度でカンチレバーに付着した物質の質量を検出することができる。
【0096】
また、センサとして歪み抵抗素子をカンチレバーに埋め込むことより、光てこ方式を使用しないため、溶液中などでカンチレバー型バイオセンサを使用する際に再度光軸調整する必要がなく、簡便に使用することができる。
【0097】
また、検出回路で検出された電圧変化を示す振動信号をデジタルデータに変換し、このデジタルデータに基づいて計測対象物に関する物理量を計測することにより、検出できる電圧変化の周波数領域に制限がなく、また、電圧変化が大きくても高精度に電圧変化を検出できるため、高精度かつ広範囲に計測対象物に関する物理量を計測することができる。
【0098】
なお、本実施の形態では、カンチレバーの振動周波数を検出する場合を例に説明したが、カンチレバーの加振周波数を検出するようにしてもよい。この場合には、検出回路の後段にロックインアンプを設け、振動信号が表わす振動周波数から加振周波数を抽出するようにすればよい。
【0099】
また、カンチレバーを一つだけ設けた場合を例に説明したが、これに限定されるものではなく、複数のカンチレバーを設けて、各カンチレバーの振動周波数から、高周波成分と低周波成分とを各々検出するようにしてもよい。この場合には、複数のカンチレバーに異なる物質が付着するように構成し、同時に異なる物質の付着量を計測するようにしてもよい。また、各カンチレバーに同じ物質が付着するようにして、計測結果の各々を用いて、より高精度に物質の付着量を計測するようにしてもよい。
【0100】
また、本実施の形態では、アクチュエータ14を圧電素子で構成した例について説明したが、本実施の形態においては図13に示すように圧電素子の電極部分の各々に絶縁皮膜28を被覆し、電気的に絶縁するようにしてもよい。この場合においても、上記と同様に、アクチュエータ14の一方の絶縁皮膜を台座12に接着または機械的に接合させてアクチュエータ14を台座12とを一体化させる。アクチュエータ14の電極が絶縁皮膜28により被覆されているため、このカンチレバー10を反応溶液に浸漬することにより直ちに計測を開始することができる。
【0101】
また、上記では、カンチレバーを溶液中に浸漬した場合を例に説明したが、計測対象物が浮遊している大気中又はガス中にカンチレバーを配置するようにしてもよい。また、真空中にカンチレバーを配置するようにしてもよい。
【0102】
また、図14に示すように、カンチレバー10及び台座12を絶縁皮膜28で被覆するようにしてもよい。この場合には、アクチュエータ14は上記図13に示したように絶縁皮膜により被覆してもよいし、被覆しないようにしてもよい。これにより、カンチレバー10を反応溶液中に浸漬したときに、カンチレバー10の表面にリーク電流が流れるのを防止し、検出回路18によって正確に電流を計測することができる。
【0103】
次に、本発明の第3の実施の形態について説明する。第3の実施の形態は、カンチレバーの振動状態の変化を検出するセンサとして第1の実施の形態及び第2の実施の形態の歪み抵抗素子に代えて、カンチレバーの振動に応じて静電容量が変化する静電容量素子を使用するものである。本実施の形態では、図15に示すように、カンチレバー10と台座12との接合部16には、歪み抵抗素子が設けられていない。
【0104】
また、図15に示すように、カンチレバー10と対向して平行になるように対向電極30が台座12に固定され、対向電極30により、カンチレバー10の貫通孔10Aが穿設されていない未開口部分を静電容量素子の一部とし、対向電極30とカンチレバー10の未開口部分との間に静電容量素子が構成されている。そして、カンチレバー10及び対向電極30は、上記と同様に静電容量素子と共にホイーストンブリッジを構成するブリッジ回路18Aを備えた検出回路18に接続されている。これにより、カンチレバーが振動すると静電容量素子の静電容量が周期的に変化するため、検出回路18のブリッジ回路18Aによってカンチレバーの振動を検出し、振動信号を出力することができる。
【0105】
本実施の形態によれば、検出回路18から出力される振動信号の高周波数成分(共振信号)及び低周波数成分(変形信号)の各々をハイパスフィルタ19B及びローパスフィルタ19Cの各々によって取り出し、低周波数成分によって高周波数成分を補正して、共振周波数の変化を検出する。また、この共振周波数の変化から上記と同様にカンチレバーに付着した物質の質量の時間変化等を検出することができる。または、検出回路18から出力される振動信号の低周波数成分(変形信号)をローパスフィルタ19Cによって取り出し、低周波数成分に基づいて、温度の時間変化等を検出することができる。
【0106】
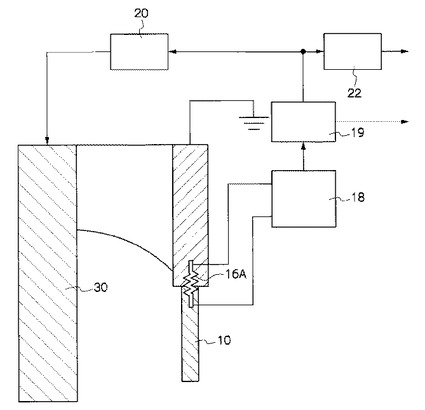
次に、図16を参照して本発明の第4の実施の形態について説明する。本実施の形態は、第3の実施の形態の対向電極をアクチュエータとして使用するようにしたものである。カンチレバーの振動を検出するセンサとしては、第1の実施の形態と同様の歪み抵抗素子16Aが用いられている。
【0107】
歪み抵抗素子16Aは、第1の実施の形態と同様に、検出回路18のブリッジ回路18Aに接続されている。また、カンチレバー10の基端側は接地され、静電容量素子を構成する対向電極30は、正帰還回路20に接続されている。
【0108】
本実施の形態によれば、歪み抵抗素子16Aの電圧変化を検出回路18のブリッジ回路18Aで検出し、検出した振動信号から高周波数成分を増幅回路19のハイパスフィルタ19Bによって取り出して、正帰還回路20に入力し、対向電極30に加振信号として入力されるので、カンチレバー10が共振振動するように制御される。また、検出回路18のブリッジ回路18Aで検出された振動信号からハイパスフィルタ19Bによって取り出された高周波数成分は、F−V変換回路22を介してパーソナルコンピュータ26に入力される。また、検出回路18のブリッジ回路18Aで検出された振動信号からローパスフィルタ19Cによって取り出された低周波数数成分がパーソナルコンピュータ26に入力される。そして、パーソナルコンピュータ26において、低周波数成分に基づいて高周波数成分を補正して、共振周波数の変化を検出し、この共振周波数の変化から上記と同様にカンチレバー10に付着した物質の質量の時間変化等が検出される。または、検出回路18から出力される振動信号の低周波数成分(変形信号)をローパスフィルタ19Cによって取り出し、低周波数成分に基づいて、温度の時間変化等を検出することができる。
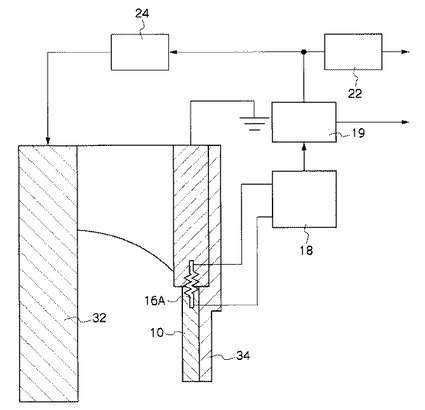
【0109】
次に、図17を参照して本発明の第5の実施の形態について説明する。本実施の形態は、第4の実施の形態の静電誘導アクチュエータに代えて、電磁誘導型アクチュエータを用いたものである。本実施の形態では、カンチレバー10と対向して略並行になるように電磁誘導コイル32が台座12に固定され、カンチレバー10の表面側には磁性材で構成された磁性薄膜34がコーティングされている。カンチレバーの振動を検出するセンサとしては、第1の実施の形態と同様の歪み抵抗素子16Aが用いられている。
【0110】
本実施の形態によれば、上記と同様に歪み抵抗素子16Aからの信号を検出回路18のブリッジ回路18Aで検出し、検出した振動信号から増幅回路19のハイパスフィルタ19Bによって高周波数成分(共振信号)が取り出されて正帰還回路20に入力され、電磁誘導コイル32に加振信号として入力されるので、カンチレバー10が共振振動される。また、上記と同様に、検出回路18のブリッジ回路18Aで検出された振動信号からハイパスフィルタ19Bによって取り出された高周波数成分は、F−V変換回路22を介してパーソナルコンピュータ26に入力され、また、検出回路18のブリッジ回路18Aで検出された振動信号からローパスフィルタ19Cによって取り出された低周波数数成分がパーソナルコンピュータ26に入力される。そして、パーソナルコンピュータ26において共振周波数の変化を検出し、この共振周波数の変化から上記と同様にカンチレバー10に付着した物質の質量の時間変化等が検出される。または、検出回路18から出力される振動信号の低周波数成分(変形信号)をローパスフィルタ19Cによって取り出し、低周波数成分に基づいて、温度の時間変化等を検出することができる。
【0111】
図17では片面だけにコーティングしたが、両面にコーティングしてもよく、図17と反対の面にコーティングしてもよい。
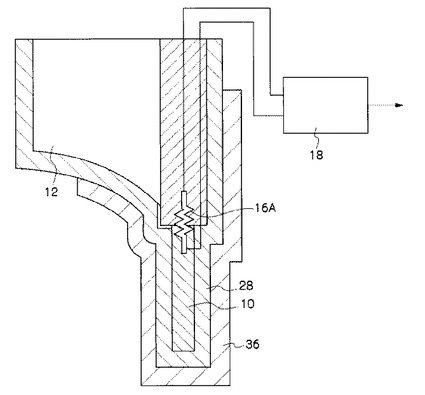
【0112】
図18は、本発明の第6の実施の形態を示すものであり、図14に示したカンチレバーの絶縁皮膜に、検出対象の物質を付着させるために、特別な化学反応基を付着させるための金等で構成された薄膜36を被覆したものである。薄膜の種類は、付着させる物質に応じて適宜選択される。これにより、チオール基等を介在して人為的に選択された蛋白質、DNA、抗体、または抗原等の計測対象物に関する物理量の時間変化等を検出することができる。
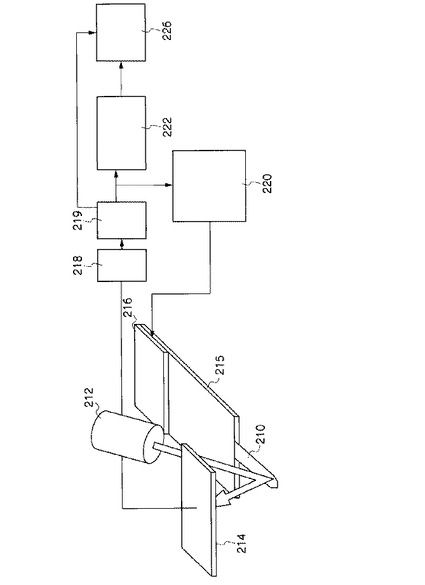
【0113】
次に、第7の実施の形態について説明する。第7の実施の形態に係るカンチレバー型バイオセンサは、図19に示すように、レーザ光を照射する半導体レーザ212と、半導体レーザ212から照射されたレーザ光であって、かつ、レンズ(図示省略)によって集光された光を反射させるための反射面を有するカンチレバー210と、カンチレバー210の反射面で反射されたレーザ光を入射させるように設けられたフォトダイオード等で構成された位置検出器214とを備えており、光てこを利用して小さなカンチレバー210の共振周波数の変化を検出し、物理量、化学量、温度、または応力等を検出する。
【0114】
また、カンチレバー型バイオセンサは、台座215を加振することによりカンチレバー210を振動させる圧電素子で構成されたアクチュエータ216と、カンチレバー210の振動状態の変化を検出するための検出回路218と、検出回路218から出力された振動信号を増幅すると共に、高周波数成分と低周波数成分とを取り出す増幅回路219と、アクチュエータ216を駆動してカンチレバー210を共振させるための正帰還回路220、周波数を電圧に変換するF−V変換回路(FM復調回路)222と、データ処理及び表示を行なうパーソナルコンピュータ226とを備えている。
【0115】
また、図20に示すように、カンチレバー210は、貫通孔10Aが穿設されていない未開口部分を反射面としている。なお、カンチレバー210の反射面は平坦である。
【0116】
本実施の形態によれば、半導体レーザ212からレーザ光をカンチレバー210の反射面に照射し、カンチレバー210からの反射光を位置検出器214に入射し、位置検出器214から出力される信号に基づいて、検出回路218において振動信号を検出する。そして、振動信号から高周波数成分及び低周波数成分を取り出して、振動信号の高周波数成分及び低周波数成分に基づいて、共振周波数の変化を検出し、この共振周波数の変化から上記と同様にカンチレバーに付着した物質の質量の時間変化等を検出することができる。または、検出回路218から出力される振動信号の低周波数成分(変形信号)をローパスフィルタによって取り出し、低周波数成分に基づいて、温度の時間変化等を検出することができる。
【0117】
次に、第8の実施の形態について説明する。なお、第1の実施の形態と同様の構成については、同一符号を付して説明を省略する。第8の実施の形態に係るカンチレバー型バイオセンサは、図21に示すように、カンチレバー10、台座12、アクチュエータ14、接合部16、検出回路18、増幅回路19、F−V変換回路22、パーソナルコンピュータ26、及びアクチュエータ14に接続され、かつ、アクチュエータ14へ発振信号を出力することにより、アクチュエータ14を振動させる加振回路320を備えている。
【0118】
パーソナルコンピュータ26は、加振回路320に接続されており、加振回路320が発振信号を出力するように制御する。アクチュエータ14をインパルス加振させるためのインパルス加振制御信号を加振回路320へ出力し、加振回路320からインパルス加振させるための加振信号をアクチュエータ14に入力させる。これによってカンチレバー10をカンチレバーの厚み方向に加振させる。
【0119】
また、パーソナルコンピュータ26は、カンチレバー10が共振周波数で振動されるように、インパルス加振制御信号を加振回路320に出力し、カンチレバー10を共振周波数で振動させる。
【0120】
そして、カンチレバー10を共振周波数で振動させた状態において、パーソナルコンピュータ26は、検出回路18から出力される振動信号の高周波数成分(共振信号)及び低周波数成分(変形信号)から、共振周波数の変化を検出し、この共振周波数の変化から上記と同様にカンチレバーに付着した物質の質量の時間変化等を検出することができる。または、検出回路18から出力される振動信号の低周波数成分(変形信号)をローパスフィルタ19Cによって取り出し、低周波数成分に基づいて、温度の時間変化等を検出することができる。
【0121】
次に、第9の実施の形態について説明する。なお、第1の実施の形態と同様の構成については、同一符号を付して説明を省略する。第9の実施の形態に係るカンチレバー型バイオセンサは、図22に示すように、カンチレバー10、台座12、アクチュエータ14、接合部16、検出回路18、増幅回路19、F−V変換回路22、パーソナルコンピュータ26、及びアクチュエータ14に接続され、かつ、振動周波数を徐々に変更しながらアクチュエータ14へ発振信号を出力して、アクチュエータ14を振動させる振動周波数制御回路420を備えている。
【0122】
パーソナルコンピュータ26は、振動周波数制御回路420に接続されており、振動周波数制御回路420が出力する発振信号の振動周波数の変化を制御する。振動周波数を徐々に変更しながらアクチュエータ14を振動させるための周波数制御開始信号を振動周波数制御回路420へ出力し、振動周波数制御回路420から振動周波数を徐々に変更しながら、発振信号をアクチュエータ14に入力させる。これによって、振動周波数を徐々に変更しながら、カンチレバー10をカンチレバーの厚み方向に加振させる。
【0123】
また、パーソナルコンピュータ26は、カンチレバー10が共振周波数で振動している状態であると判断すると、振動周波数の変更を停止させる周波数制御停止信号を振動周波数制御回路420へ出力し、カンチレバー10を共振周波数で振動させた状態を維持させる。
【0124】
そして、カンチレバー10を共振周波数で振動させた状態において、パーソナルコンピュータ26は、検出回路18から出力される振動信号の高周波数成分(共振信号)及び低周波数成分(変形信号)から、共振周波数の変化を検出し、この共振周波数の変化から上記と同様にカンチレバーに付着した物質の質量の時間変化等を検出することができる。または、検出回路18から出力される振動信号の低周波数成分(変形信号)をローパスフィルタ19Cによって取り出し、低周波数成分に基づいて、温度の時間変化等を検出することができる。
【0125】
なお、上記の実施の形態では、自己検知素子として、歪み抵抗素子または静電容量素子を用いた例について説明したが、圧電素子、電磁誘導素子、または温度検知素子等を用いるようにしてもよい。また、アクチュエータとしても圧電素子、静電駆動の静電容量素子に代えて、温度駆動のアクチュエータ、または光駆動のアクチュエータ等を用いるようにしてもよい。さらに、カンチレバーを絶縁皮膜で被覆した例について説明したが、自然酸化膜で覆うようにしてもよい。
【図面の簡単な説明】
【0126】
【図1】本発明の第1の実施の形態に係るカンチレバー型センサの構成を示す概略図である。
【図2】本発明の第1の実施の形態に係る検出回路及び増幅回路の構成を示す概略図である。
【図3】(A)本発明の第1の実施の形態に係るカンチレバー及び台座の構成を示す図、及び(B)カンチレバーの構成を示す図である。
【図4】温度変化によってカンチレバーのばね定数が変化する様子を示すイメージ図である。
【図5】(A)初期状態におけるカンチレバーが共振しているときの歪み抵抗素子の抵抗を説明するための図、及び(B)温度変化後におけるカンチレバーが共振しているときの歪み抵抗素子の抵抗を説明するための図である。
【図6】初期状態においてブリッジ回路から出力される振動信号を説明するための回路図である。
【図7】温度変化後においてブリッジ回路から出力される振動信号を説明するための回路図である。
【図8】振動信号のDC成分電圧と水温との関係を示すグラフである。
【図9】振動信号のDC成分電圧と共振周波数との関係を示すグラフである。
【図10】本発明の第2の実施の形態のカンチレバーに付着した物質を検出する処理ルーチンを示すフローチャートである。
【図11】比較対象となるカンチレバー型バイオセンサの実験結果を示すグラフである。
【図12】本発明の第2の実施の形態に係るカンチレバー型バイオセンサの実験結果を示すグラフである。
【図13】本発明の第2の実施の形態の変形例を示す概略図である。
【図14】本発明の第2の実施の形態の他の変形例を示す概略図である。
【図15】本発明の第3の実施の形態に係るカンチレバー型バイオセンサの構成を示す概略図である。
【図16】本発明の第4の実施の形態に係るカンチレバー型バイオセンサの構成を示す概略図である。
【図17】本発明の第5の実施の形態に係るカンチレバー型バイオセンサの構成を示す概略図である。
【図18】本発明の第6の実施の形態に係るカンチレバー型バイオセンサの構成を示す概略図である。
【図19】本発明の第7の実施の形態に係るカンチレバー型バイオセンサの構成を示す概略図である。
【図20】本発明の第7の実施の形態に係るカンチレバーの構成を示す図である。
【図21】本発明の第8の実施の形態に係るカンチレバー型バイオセンサの構成を示す概略図である。
【図22】本発明の第9の実施の形態に係るカンチレバー型バイオセンサの構成を示す概略図である。
【符号の説明】
【0127】
10、210 カンチレバー
12、215 台座
14、216 アクチュエータ
16A 歪み抵抗素子
18、218 検出回路
18A ブリッジ回路
19、219 増幅回路
19B ハイパスフィルタ
19C ローパスフィルタ
20、220 正帰還回路
22 F−V変換回路
26、226 パーソナルコンピュータ
212 半導体レーザ
214 位置検出器
320 加振回路
420 振動周波数制御回路
【特許請求の範囲】
【請求項1】
カンチレバーと、
前記カンチレバーを振動させるアクチュエータと、
前記カンチレバーの振動状態を検出する振動検出手段と、
前記カンチレバーが共振するように前記アクチュエータを制御する制御手段と、
前記カンチレバーが共振するように制御されている状態で、前記振動検出手段で検出された前記振動状態の低周波数成分、又は前記低周波数成分及び高周波数成分に基づいて、物理量を検出する物理量検出手段と、
を含むカンチレバー型センサ。
【請求項2】
前記制御手段は、前記振動検出手段で検出された前記振動状態に基づいて、前記カンチレバーが共振するように前記アクチュエータを制御する請求項1記載のカンチレバー型センサ。
【請求項3】
前記制御手段は、前記アクチュエータを制御して、前記カンチレバーをパルス加振させる請求項1記載のカンチレバー型センサ。
【請求項4】
前記制御手段は、前記アクチュエータを制御して、前記カンチレバーが共振するように、前記カンチレバーの加振周波数を変化させる請求項1記載のカンチレバー型センサ。
【請求項5】
前記物理量検出手段は、前記振動検出手段で検出された前記振動状態の前記低周波数成分に基づいて、温度を前記物理量として検出する請求項1〜請求項4の何れか1項記載のカンチレバー型センサ。
【請求項6】
前記物理量検出手段は、前記振動状態の低周波数成分と温度との予め定められた関係に基づいて、前記振動検出手段で検出された前記振動状態の前記低周波数成分に応じた前記温度を検出する請求項5記載のカンチレバー型センサ。
【請求項7】
前記物理量検出手段は、前記低周波数成分に基づいて高周波数成分の変化を予測し、前記予測された高周波数成分の変化より前記高周波数成分を補正することにより、前記カンチレバーに付着した物質の付着量を前記物理量として検出する請求項1〜請求項4の何れか1項記載のカンチレバー型センサ。
【請求項8】
前記振動検出手段を、前記カンチレバーの振動状態を検出するように前記カンチレバーに設けられたセンサで構成した請求項1〜請求項7の何れか1項記載のカンチレバー型センサ。
【請求項9】
前記カンチレバーに設けられたセンサを、前記カンチレバーの振動に応じて抵抗が変化する歪み抵抗素子を含んで構成した請求項8記載のカンチレバー型センサ。
【請求項10】
前記カンチレバーに設けられたセンサを、前記歪み抵抗素子、及び前記歪み抵抗素子の抵抗の変化によって前記振動状態を検出するためのブリッジ回路を含んで構成した請求項9記載のカンチレバー型センサ。
【請求項11】
前記カンチレバーを、液中に浸漬するか、ガス中に配置するか、真空中に配置するか、又は大気中に配置した請求項1〜請求項10の何れか1項記載のカンチレバー型センサ。
【請求項12】
前記物理量検出手段は、カンチレバーの反りを検出する反り検出手段を有することを特徴とする請求項1〜請求項11の何れか1項記載のカンチレバー型センサ。
【請求項13】
前記カンチレバーの表面を、金属、絶縁物、有機物、抗原、抗体、及びDNAの少なくとも一つで被覆したことを特徴とする請求項1〜請求項12の何れか1項記載のカンチレバー型センサ。
【請求項14】
前記カンチレバーを複数有することを特徴とした請求項1〜請求項13の何れか1項記載のカンチレバー型センサ。
【請求項1】
カンチレバーと、
前記カンチレバーを振動させるアクチュエータと、
前記カンチレバーの振動状態を検出する振動検出手段と、
前記カンチレバーが共振するように前記アクチュエータを制御する制御手段と、
前記カンチレバーが共振するように制御されている状態で、前記振動検出手段で検出された前記振動状態の低周波数成分、又は前記低周波数成分及び高周波数成分に基づいて、物理量を検出する物理量検出手段と、
を含むカンチレバー型センサ。
【請求項2】
前記制御手段は、前記振動検出手段で検出された前記振動状態に基づいて、前記カンチレバーが共振するように前記アクチュエータを制御する請求項1記載のカンチレバー型センサ。
【請求項3】
前記制御手段は、前記アクチュエータを制御して、前記カンチレバーをパルス加振させる請求項1記載のカンチレバー型センサ。
【請求項4】
前記制御手段は、前記アクチュエータを制御して、前記カンチレバーが共振するように、前記カンチレバーの加振周波数を変化させる請求項1記載のカンチレバー型センサ。
【請求項5】
前記物理量検出手段は、前記振動検出手段で検出された前記振動状態の前記低周波数成分に基づいて、温度を前記物理量として検出する請求項1〜請求項4の何れか1項記載のカンチレバー型センサ。
【請求項6】
前記物理量検出手段は、前記振動状態の低周波数成分と温度との予め定められた関係に基づいて、前記振動検出手段で検出された前記振動状態の前記低周波数成分に応じた前記温度を検出する請求項5記載のカンチレバー型センサ。
【請求項7】
前記物理量検出手段は、前記低周波数成分に基づいて高周波数成分の変化を予測し、前記予測された高周波数成分の変化より前記高周波数成分を補正することにより、前記カンチレバーに付着した物質の付着量を前記物理量として検出する請求項1〜請求項4の何れか1項記載のカンチレバー型センサ。
【請求項8】
前記振動検出手段を、前記カンチレバーの振動状態を検出するように前記カンチレバーに設けられたセンサで構成した請求項1〜請求項7の何れか1項記載のカンチレバー型センサ。
【請求項9】
前記カンチレバーに設けられたセンサを、前記カンチレバーの振動に応じて抵抗が変化する歪み抵抗素子を含んで構成した請求項8記載のカンチレバー型センサ。
【請求項10】
前記カンチレバーに設けられたセンサを、前記歪み抵抗素子、及び前記歪み抵抗素子の抵抗の変化によって前記振動状態を検出するためのブリッジ回路を含んで構成した請求項9記載のカンチレバー型センサ。
【請求項11】
前記カンチレバーを、液中に浸漬するか、ガス中に配置するか、真空中に配置するか、又は大気中に配置した請求項1〜請求項10の何れか1項記載のカンチレバー型センサ。
【請求項12】
前記物理量検出手段は、カンチレバーの反りを検出する反り検出手段を有することを特徴とする請求項1〜請求項11の何れか1項記載のカンチレバー型センサ。
【請求項13】
前記カンチレバーの表面を、金属、絶縁物、有機物、抗原、抗体、及びDNAの少なくとも一つで被覆したことを特徴とする請求項1〜請求項12の何れか1項記載のカンチレバー型センサ。
【請求項14】
前記カンチレバーを複数有することを特徴とした請求項1〜請求項13の何れか1項記載のカンチレバー型センサ。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2008−241618(P2008−241618A)
【公開日】平成20年10月9日(2008.10.9)
【国際特許分類】
【出願番号】特願2007−85568(P2007−85568)
【出願日】平成19年3月28日(2007.3.28)
【国等の委託研究の成果に係る記載事項】(出願人による申告)国等の委託研究の成果に係る特許出願(平成18年度地域コンソーシアム研究開発事業、産業活力再生特別措置法第30条の適用を受けるもの)
【出願人】(504145364)国立大学法人群馬大学 (352)
【出願人】(000151520)株式会社東京測器研究所 (29)
【公開日】平成20年10月9日(2008.10.9)
【国際特許分類】
【出願日】平成19年3月28日(2007.3.28)
【国等の委託研究の成果に係る記載事項】(出願人による申告)国等の委託研究の成果に係る特許出願(平成18年度地域コンソーシアム研究開発事業、産業活力再生特別措置法第30条の適用を受けるもの)
【出願人】(504145364)国立大学法人群馬大学 (352)
【出願人】(000151520)株式会社東京測器研究所 (29)
[ Back to top ]