
カンチレバー評価システム、カンチレバー評価方法及びカンチレバー評価プログラム
【課題】精度の高い測定が可能なカンチレバーを設計したり測定信号に含まれるカンチレバーの変形を解析するために、流体中のカンチレバーの挙動を評価することができるカンチレバー評価システム、カンチレバー評価方法及びカンチレバー評価プログラム提供する。
【解決手段】カンチレバー評価システム20の制御部21は、取得した流れ関数値ψz(x,y;t)及び渦度ωz(x,y;t)と、カンチレバーの変位h(z;t)及び速度[(∂/∂t)h(z;t)]
に応じた境界条件とを用いて、2次元面内の流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)を算出する。制御部21は、算出した流れ関数値ψz(x,y)及び渦度ωz(x,y)を用いてカンチレバーの流体抗力を算出する。制御部21は、算出した流体抗力を変位算出式に代入して、次のタイムステップでの1次元梁の変位h(z;t+1)の計算処理を実行する。これら
の処理をそれぞれ格子点毎に繰り返し、更に、それをタイムステップ毎に繰り返す。
【解決手段】カンチレバー評価システム20の制御部21は、取得した流れ関数値ψz(x,y;t)及び渦度ωz(x,y;t)と、カンチレバーの変位h(z;t)及び速度[(∂/∂t)h(z;t)]
に応じた境界条件とを用いて、2次元面内の流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)を算出する。制御部21は、算出した流れ関数値ψz(x,y)及び渦度ωz(x,y)を用いてカンチレバーの流体抗力を算出する。制御部21は、算出した流体抗力を変位算出式に代入して、次のタイムステップでの1次元梁の変位h(z;t+1)の計算処理を実行する。これら
の処理をそれぞれ格子点毎に繰り返し、更に、それをタイムステップ毎に繰り返す。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、流体中でのカンチレバーの振動特性のコンピュータによる数値シミュレーション解析に使用され、カンチレバーの設計等を支援するためのカンチレバー評価システム、カンチレバー評価方法及びカンチレバー評価プログラムに関するものである。
【背景技術】
【0002】
試料表面の細かい形状や性質を測定するために、走査型プローブ顕微鏡(SPM;Scanning Probe Microscope)が利用されている。この走査型プローブ顕微鏡は、探針を試料
に近づけて、探針と試料との間に発生する原子間力の引力や斥力、電流(トンネル電流)などの物理的現象を測定する。これにより、試料表面の形状や性質を原子レベルで測定することができる。
【0003】
このような走査型プローブ顕微鏡においては、カンチレバーの先端に探針を設け、この探針の上下動を測定する(例えば、特許文献1を参照。)。この場合、カンチレバーの背面にレーザ光を照射し、その反射ビームの位置によって、探針の上下動を測定する。従って、カンチレバーの動きが、探針による測定精度に影響を与えることになる。
【0004】
また、今日、溶液中の試料により測定を行なう原子間力顕微鏡も検討されている(例えば、特許文献2を参照。)。
【特許文献1】特開平5−71951号公報(第1頁)
【特許文献2】特開平11−118813号公報(第1頁)
【発明の開示】
【発明が解決しようとする課題】
【0005】
通常、このような走査型プローブ顕微鏡は、真空中や大気中で測定することが多い。そこで、従来から、カンチレバー単体の振動・変形特性の数値シミュレーションによる解析は行なわれている。
【0006】
一方、走査型プローブ顕微鏡の測定対象は多様化しており、特許文献2のようにバイオ分野等では水溶液等の中で測定しなければならないこともある。このような水溶液中では、強い流体抗力を受けてカンチレバーの振動・変形特性が変化する。
【0007】
しかし、カンチレバーを用いた原子間力顕微鏡像の従来の数値シミュレーションでは、カンチレバー先端に付加された探針と試料・基板との相互作用のみが計算され、カンチレバーと水溶液を含めた総合的な数値シミュレーションは行なわれていない。
【0008】
一方、従来においても、流体の数値シミュレーションは数多く行なわれているが、障害物であるカンチレバーの弾性変形と連成させた数値シミュレーションも行なわれていない。
【0009】
更に、従来のシミュレーションでは、探針の試料との接触高さを測定信号と直接関係する測定量として計算していた。しかし、現実には、カンチレバー先端に照射されたレーザ光線の反射スポットの位置が測定信号である。この現実の測定状況に即した数値シミュレーションも行なわれていない。
【0010】
本発明は、上述の問題に鑑みてなされ、精度の高い測定が可能なカンチレバーの設計や
カンチレバーの変形を考慮した測定信号の解析のために、流体中のカンチレバーの挙動を評価することができるカンチレバー評価システム、カンチレバー評価方法及びカンチレバー評価プログラム提供することにある。
【課題を解決するための手段】
【0011】
上記問題点を解決するために、請求項1に記載の発明は、カンチレバーの形状に基づく構造パラメータと、前記カンチレバーを構成する材料の材料物性値と、前記カンチレバーの周辺の流体の流体物性値とを含むパラメータを記憶したパラメータデータ記憶手段と、前記カンチレバーを1次元の片持ち梁構造体としてモデル化したときの前記梁構造体の長手方向の各梁格子点の変位に関するデータを記憶する梁格子座標データ記憶手段と、各梁格子点をそれぞれ含み前記長手方向に対して直交する面における前記流体の流体分布に関するデータを記憶する流体分布データ記憶手段と、前記カンチレバーの振動特性を算出する制御手段とを備えたカンチレバー評価システムであって、前記制御手段が、前記片持ち梁構造体の支持点に強制振動を印加した場合の支持点の変位を、タイムステップ毎に前記梁格子座標データ記憶手段に記録する手段と、計算対象の梁格子点を特定する手段と、前記特定した梁格子点毎に、先のタイムステップにおける前記梁格子点の変位を前記梁格子座標データ記憶手段から取得し、この変位を境界条件として用いて、計算対象の格子点を含む計算対象面における流体分布を、前記パラメータデータ記憶手段に記録された流体物性値及び前記流体分布データ記憶手段に記憶された流体分布を用いて算出する手段と、算出した流体分布と、前記パラメータデータ記憶手段に記録された前記流体物性値を用いて流体抗力を算出する手段と、前記流体抗力と、前記パラメータデータ記憶手段に記録された構造パラメータ及び材料物性値を用いた片持ち梁構造体の運動方程式を計算して、前記計算対象の格子点の座標を算出して、前記梁格子座標データ記憶手段に記憶する手段と、各計算対象の格子点の座標の算出を繰り返して行なうタイムステップ制御手段とを備えたことを要旨とする。
【0012】
請求項2に記載の発明は、請求項1に記載のカンチレバー評価システムにおいて、前記制御手段は、前記強制振動の周波数を、所定の範囲で順次変更する強制振動設定手段と、強制振動の周波数毎に前記片持ち梁構造体の先端の振幅を算出し、この振動の周波数特性を出力する手段とを更に備えたことを要旨とする。
【0013】
請求項3に記載の発明は、請求項1又は2に記載のカンチレバー評価システムにおいて、前記制御手段は、前記片持ち梁構造体の先端の格子点において、前記カンチレバーの先端に設けられた探針が測定試料及びこの試料の基板から受ける作用力を算出する手段を更に備え、前記制御手段は、この作用力を含む片持ち梁構造体の運動方程式を計算することを要旨とする。
【0014】
請求項4に記載の発明は、請求項1〜3のいずれか1項に記載のカンチレバー評価システムにおいて、前記カンチレバーの先端の格子点の座標と、この格子点に隣接する格子点の座標から先端部の傾斜角度を算出する手段と、前記格子点の座標及び傾斜角度を用いて、前記先端の格子点に照射したレーザの反射光路を特定して反射スポットの位置を算出する手段とを更に備えたことを要旨とする。
【0015】
請求項5に記載の発明は、カンチレバーの形状に基づく構造パラメータと、前記カンチレバーを構成する材料の材料物性値と、前記カンチレバーの周辺の流体の流体物性値とを含むパラメータを記憶したパラメータデータ記憶手段と、前記カンチレバーを1次元の片持ち梁構造体としてモデル化したときの前記梁構造体の長手方向の各梁格子点の変位に関するデータを記憶する梁格子座標データ記憶手段と、各梁格子点をそれぞれ含み前記長手方向に対して直交する面における前記流体の流体分布に関するデータを記憶する流体分布データ記憶手段と、制御手段とを備え、前記カンチレバーの振動特性を算出するためのカ
ンチレバー評価方法であって、前記制御手段が、前記片持ち梁構造体の支持点に強制振動を印加した場合の支持点の変位を、タイムステップ毎に前記梁格子座標データ記憶手段に記録する段階と、計算対象の梁格子点を特定する段階と、前記特定した梁格子点毎に、先のタイムステップにおける前記梁格子点の変位を前記梁格子座標データ記憶手段から取得し、この変位を境界条件として用いて、計算対象の格子点を含む計算対象面における流体分布を、前記パラメータデータ記憶手段に記録された流体物性値及び前記流体分布データ記憶手段に記憶された流体分布を用いて算出する段階と、算出した流体分布と、前記パラメータデータ記憶手段に記録された前記流体物性値を用いて流体抗力を算出する段階と、前記流体抗力と、前記パラメータデータ記憶手段に記録された構造パラメータ及び材料物性値を用いた片持ち梁構造体の運動方程式を計算して、前記計算対象の格子点の座標を算出して、前記梁格子座標データ記憶手段に記憶する段階と、各計算対象の格子点の座標の算出を繰り返して行なうタイムステップ制御段階とを実行することを要旨とする。
【0016】
請求項6に記載の発明は、カンチレバーの形状に基づく構造パラメータと、前記カンチレバーを構成する材料の材料物性値と、前記カンチレバーの周辺の流体の流体物性値とを含むパラメータを記憶したパラメータデータ記憶手段と、前記カンチレバーを1次元の片持ち梁構造体としてモデル化したときの前記梁構造体の長手方向の各梁格子点の変位に関するデータを記憶する梁格子座標データ記憶手段と、各梁格子点をそれぞれ含み前記長手方向に対して直交する面における前記流体の流体分布に関するデータを記憶する流体分布データ記憶手段と、制御手段とを備え、前記カンチレバーの振動特性を算出するためのカンチレバー評価プログラムであって、前記制御手段を、前記片持ち梁構造体の支持点に強制振動を印加した場合の支持点の変位を、タイムステップ毎に前記梁格子座標データ記憶手段に記録する手段、計算対象の梁格子点を特定する手段、前記特定した梁格子点毎に、先のタイムステップにおける前記梁格子点の変位を前記梁格子座標データ記憶手段から取得し、この変位を境界条件として用いて、計算対象の格子点を含む計算対象面における流体分布を、前記パラメータデータ記憶手段に記録された流体物性値及び前記流体分布データ記憶手段に記憶された流体分布を用いて算出する手段、算出した流体分布と、前記パラメータデータ記憶手段に記録された前記流体物性値を用いて流体抗力を算出する手段、前記流体抗力と、前記パラメータデータ記憶手段に記録された構造パラメータ及び材料物性値を用いた片持ち梁構造体の運動方程式を計算して、前記計算対象の格子点の座標を算出して、前記梁格子座標データ記憶手段に記憶する手段、及び各計算対象の格子点の座標の算出を繰り返して行なうタイムステップ制御手段として機能することを要旨とする。
【0017】
(作用)
請求項1、5又は6に記載の発明によれば、制御手段は、カンチレバーを片持ち梁構造体としてモデル化し、カンチレバー周辺の流体を、各梁格子点をそれぞれ含み長手方向に対して直交する2次元の面において挙動する流体としてモデル化する。更に、片持ち梁構造体に強制振動を印加した場合の支持点における各タイムステップの振幅を梁格子座標データ記憶手段に記録する。そして、制御手段は、タイムステップ毎に、各梁格子点の先のタイムステップの変位を境界条件として用いて、各梁格子点を含む計算対象面における流体分布を、流体物性値及び過去の流体分布を用いて算出する。次に、制御手段は、算出した流体分布と流体物性値を用いて流体抗力を算出し、この流体抗力、構造パラメータ及び材料物性値を用いて片持ち梁構造体の運動方程式を計算して、計算対象の格子点の座標を算出して、梁格子座標データ記憶手段に記憶する。制御手段は、このようなステップ毎の処理を、梁格子点毎に繰り返して行なう。
【0018】
このため、カンチレバーの変形を境界条件として用いて流体分布を計算し、算出した流体抗力を用いてカンチレバーの変形を計算することを交互に繰り返す。従って、カンチレバーから流体への影響を考慮した式と、流体からカンチレバーへの影響を考慮した式とを連立させて計算を行なうので、カンチレバーとその周辺の流体の挙動も含めた総合的な数
値シミュレーションを行なうことができる。更に、この場合、カンチレバーをモデル化した1次元に直交する2次元面で流体をモデル化することにより、全体として3次元の挙動をシミュレーションすることができる。従って、カンチレバーの挙動を効率的かつ的確に評価し、精度の高い測定が可能なカンチレバーの設計やカンチレバーの変形を考慮した測定信号の解析に役立てることができる。また、カンチレバーを1次元にモデル化し、流体を2次元でモデル化しているので、それぞれの計算は、3次元モデルの計算よりも簡単であり、計算負荷を軽減することができる。
【0019】
請求項2に記載の発明によれば、制御手段は、強制振動の周波数を、所定の範囲で順次変更して、強制振動の周波数毎に片持ち梁構造体の先端の振幅を算出し、振動の周波数特性を出力する。このため、異なる強制振動を与えたときのカンチレバーの先端高さの時間依存性や、振動振幅スペクトル等を自動的に生成することができるので、これらに基づいてカンチレバーを評価することができる。
【0020】
請求項3に記載の発明によれば、制御手段は、片持ち梁構造体の先端の格子点において、カンチレバーの先端が測定試料及びこの試料の基板から受ける作用力を算出し、この作用力を含む片持ち梁構造体の運動方程式を計算する。このため、カンチレバーとその周辺の流体との挙動だけでなく、探針が試料や基板から受ける相互作用力も含めた総合的な数値シミュレーションを行なうことができる。
【0021】
請求項4に記載の発明によれば、制御手段は、カンチレバーの先端の格子点の座標と、この格子点に隣接する格子点の座標から先端部の傾斜角度を算出する。制御手段は、格子点の座標及び傾斜角度を用いて、先端の格子点に照射したレーザの反射光路を特定して反射スポットの位置を算出する。反射したレーザの信号が、走査型プローブ顕微鏡の計測信号となるので、このレーザのスポット位置を算出して計測信号を取得することができる。
【発明の効果】
【0022】
本発明によれば、流体中のカンチレバーの挙動を効率的に評価することにより、精度の高い測定が可能なカンチレバーの設計やカンチレバーの変形を考慮した測定信号の解析に役立てることができる。
【発明を実施するための最良の形態】
【0023】
以下、本発明を具体化したカンチレバー評価システムの一実施形態を図1〜図16に基づいて説明する。本実施形態のカンチレバー評価システムは、水溶液の液体中で測定を行なう走査型プローブ顕微鏡のカンチレバーの振動特性を、シミュレーションの解析結果によって評価する。この振動特性の評価は、精度の高い測定が可能なカンチレバーの設計やカンチレバーの変形を考慮した測定信号の解析を行なうために用いられる。
【0024】
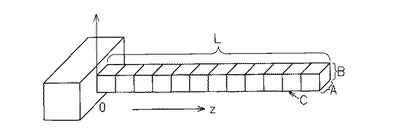
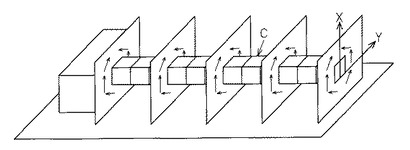
解析結果を求めるシミュレーションにおいては、図5に示すように、カンチレバーCの断面分布を考慮して、カンチレバーCを、Z軸方向に延びる1次元の梁(梁構造体)としてモデル化する。この場合、カンチレバーはX軸方向に微小変動すると仮定する。また、図6に示すように、カンチレバー周辺の液体を、非圧縮性の粘性流体としてモデル化する。この場合、液体は、Z軸方向にほぼ一様な流れでありZ方向成分を無視し、カンチレバーの延在方向(Z軸方向)の断面の限られた2次元の面(XY面)において挙動すると仮定する。そして、モデル化したカンチレバーの梁の変形振動と、その周辺に存在する液体を2次元流体とする運動の方程式とを連成させる。そして、この連成により、カンチレバーCの先端の高さ及び傾きの時間変化を計算し、その定常振動振幅を計算する。
【0025】
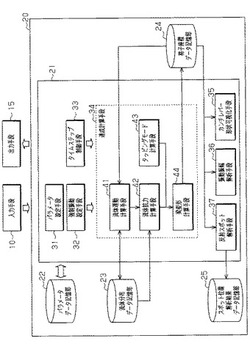
図1に示すように、本実施形態におけるカンチレバー評価システム20は、入力手段10及び出力手段15を備える。
入力手段10は、シミュレーション条件やパラメータ等の各種データや指示データを入力するための手段である。本実施形態では、シミュレーション条件として、強制振動の設定データやモードの設定データが用いられる。また、パラメータとして、カンチレバーを構成する材料や液体の物性値(カンチレバーの材料の密度ρb及びヤング率E、液体の密度ρL及び粘性率μ等)やカンチレバーの形状に関する値(形状、幅A、高さB及び長さL)が用いられる。入力手段10は、入力された各種データや指示データをカンチレバー評価システム20に供給する。
【0026】
出力手段15は、カンチレバー評価システム20の評価結果を出力するための手段(例えば、ディスプレイ)である。本実施形態では、出力手段15を介して、シミュレーション画像や振動解析のグラフを表示させて出力する。
【0027】
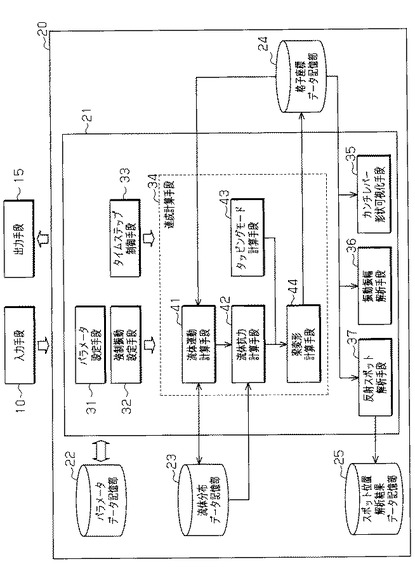
カンチレバー評価システム20は、制御部21、パラメータデータ記憶部22、流体分布データ記憶部23、格子座標データ記憶部24及びスポット位置解析結果データ記憶部25を備えている。ここで、パラメータデータ記憶部22はパラメータデータ記憶手段として機能し、流体分布データ記憶部23は流体分布データ記憶手段として機能し、格子座標データ記憶部24は梁格子座標データ記憶手段として機能する。
【0028】
制御部21は、カンチレバーの振動特性を算出する制御手段として機能することにより、後述する処理を行なう。このため、カンチレバー評価プログラムを実行することにより、制御部21は、パラメータ設定手段31、強制振動設定手段32、タイムステップ制御手段33、連成計算手段34、カンチレバー形状可視化手段35、振動振幅解析手段36及び反射スポット解析手段37として機能する。ここで、強制振動設定手段32は、片持ち梁構造体の支持点に強制振動を印加した場合の支持点の変位を、タイムステップ毎に前記梁格子座標データ記憶手段に記録する。タイムステップ制御手段33は、各計算対象の格子点の座標の算出を繰り返して行なう。連成計算手段34は、計算対象の梁格子点を特定する。
【0029】
パラメータデータ記憶部22は、カンチレバー評価シミュレーションに用いるパラメータに関するデータを記憶する。本実施形態では、パラメータとして、物性値パラメータと構造パラメータとが用いられる。物性値パラメータは、カンチレバーを構成する材料の物性値(材料の密度ρb及びヤング率E)や液体の流体物性値(液体の密度ρL及び粘性率μ)等である。例えば、本実施形態においては、カンチレバーの材料としてシリコン、液体として生体分子の水溶液を用いることとし、各材料の材料物性値が予め記憶されている。
【0030】
また、構造パラメータは、カンチレバーの形状に基づいて算出されるパラメータである。本実施形態では、構造パラメータとして、カンチレバーCの断面積S(z)及び断面二次
モーメントI(z)が用いられる。
【0031】
流体分布データ記憶部23は、カンチレバー周辺の液体の流体分布に関するデータを記憶する。本実施形態では、タイムステップ毎で、カンチレバーCの座標zにある各流体格子点における流体分布を流れ関数と渦度方程式によって表現する。このため、流体分布データ記憶部23には、タイムステップtで座標x,yで表示される各流体格子点の流れ関数値ψz(x,y;t)及び渦度ωz(x,y;t)が記録される。タイムステップt=0において流体は静止状態にあるため、流れ関数値ψz(x,y;t=0)及び渦度ωz(x,y;t=0)の値は「0」として記憶されている。本実施形態においては、連成計算手段34が、流れ関数値ψz(x,y;t)及び渦度ωz(x,y;t)と、カンチレバーの変位h(z;t)及び速度[(∂/∂t)h(z;t)]に応じ
た境界条件とを用いて、次のタイムステップの流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)を算出すると、流体分布データ記憶部23に記憶する。
【0032】
格子座標データ記憶部24は、カンチレバーCの各格子座標の変形に関するデータを記憶する。本実施形態では、タイムステップ毎で、カンチレバーCの座標zにある格子の変位h(z;t)及び速度[(∂/∂t)h(z;t)]が記録される。タイムステップt=0のときに
は、カンチレバーCの位置は初期高さh0で、変位h(z;t)及び速度[(∂/∂t)h(z;t)]は「0」として記憶されている。本実施形態においては、連成計算手段34が、タイム
ステップtにおける変位h(z;t)及び速度[(∂/∂t)h(z;t)]を算出すると、格子座標
データ記憶部24に記憶する。
【0033】
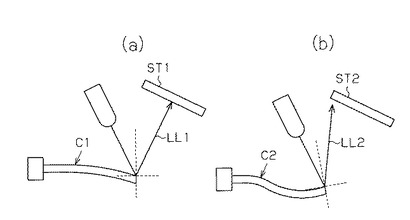
スポット位置解析結果データ記憶部25は、走査型プローブ顕微鏡の測定信号として出力されるレーザのスポット位置に関するデータを記憶する。このスポット位置は、カンチレバーCの先端部において反射したレーザ光が測定面に照射される位置である。本実施形態では、このスポット位置は、強制振動の周波数及びタイムステップ毎に、設定されたスポット測定面(例えば図13におけるST1,ST2)の座標である。このスポット位置は、反射スポット解析手段37が、スポット位置を算出すると、スポット位置解析結果データ記憶部25に記憶する。このスポット位置は、カンチレバーの先端の格子座標の変位h(z;t)と傾き[(∂/∂z)h(z;t)]から算出される。
【0034】
次に、制御部21が備える各手段(31〜37)について説明する。
パラメータ設定手段31は、シミュレーションに用いるパラメータを設定する処理を行なう。具体的には、パラメータ設定手段31は、入力手段10を介して取得したカンチレバーCの材料やその周辺の液体の物性値をパラメータデータ記憶部22に記録する。
【0035】
また、パラメータ設定手段31には、カンチレバーCの形状毎に、カンチレバーCの断面積S(z)を算出する断面積算出式、及び断面二次モーメントI(z)を算出する断面二次モーメント算出式が記憶されている。パラメータ設定手段31は、カンチレバーの形状に対応する算出式に、高さB及び幅Aを代入して、カンチレバーCの断面積S(z)及び断面二
次モーメントI(z)を算出する。そして、断面積S(z)及び断面二次モーメントI(z)をパ
ラメータデータ記憶部22に記憶する。
【0036】
強制振動設定手段32は、カンチレバーCに印加する強制振動を設定する処理を行なう。強制振動設定手段32は、設定した強制振動をカンチレバーCの支持点(z=0)に供給するように、連成計算手段34に境界条件として供給する。この強制振動設定手段32は、入力手段10を介して強制振動の振幅及び周波数の範囲(上限値及び下限値)を取得して保持する。本実施形態では、強制振動設定手段32は、周波数の範囲内にある所定周波数(例えば1[kHz])間隔の周波数を、順次、連成計算手段34に供給する。
【0037】
タイムステップ制御手段33は、連成計算手段34のタイムステップの制御を行なう。
連成計算手段34は、カンチレバーCの周辺の液体の流体運動と、この流体運動による作用力や他の力などが作用したときのカンチレバーCの各座標における変位(カンチレバーの撓み)とを連立して計算する処理を行なう。そして、連成計算手段34は、流体運動計算手段41、流体抗力計算手段42、タッピングモード計算手段43及び梁変形計算手段44等として機能する。流体運動計算手段41は、特定した梁格子点毎に、先のタイムステップにおける梁格子点の変位を格子座標データ記憶手段から取得し、この変位を境界条件として用いて、計算対象の格子点を含む計算対象面における流体分布を、パラメータデータ記憶手段に記録された流体物性値及び流体分布データ記憶手段に記憶された流体分布を用いて算出する。流体抗力計算手段42は、特定した梁格子点毎に、算出した流体分布と、パラメータデータ記憶手段に記録された流体物性値を用いて流体抗力を算出する。梁変形計算手段44は、特定した梁格子点毎に、流体抗力と、パラメータデータ記憶手段に記録された構造パラメータ及び材料物性値を用いた片持ち梁構造体の運動方程式を計算
して、計算対象の格子点の座標を算出して、梁格子座標データ記憶手段に記憶する。
【0038】
流体運動計算手段41は、カンチレバー周辺の液体の流体運動を算出する計算処理を行なう。この流体運動計算手段41には、タイムステップt+1における流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)を算出するためのナビエ・ストークスの方程式(図3における(1)式及び(2)式)が記録されている。本実施形態では、このナビエ・ストークスの方程式は、差分法によって解を求める。このため、流体運動計算手段41は、このナビエ・ストークスの方程式と、タイムステップtにおける流れ関数値ψz(x,y;t)、渦度ωz(x,y;t)、カンチレバーの変位h(z;t)及び速度[(∂/∂t)h(z;t)]に応じた境界条件と
を用いて、次のタイムステップt+1の流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)を算出する。
【0039】
流体抗力計算手段42は、カンチレバーCに作用する流体抗力を算出する計算処理を実行する手段である。本実施形態では、流体抗力Fliqは、カンチレバーC全体が周辺の液
体から受ける圧力と粘性力との和で算出する。このため、流体抗力計算手段42は、カンチレバー表面での圧力分布PNを算出するための流体圧力算出式と、カンチレバー表面での粘性力分布PTを算出するための流体粘性力算出式と、圧力分布PN及び粘性力分布PTの和をカンチレバーC全体において積分した流体抗力算出式とを記憶している。流体圧力算出式としては図3に示す(3)式、流体粘性力算出式としては図3に示す(4)式、流体抗力算出式としては図3に示す(5)式をそれぞれ用いる。
【0040】
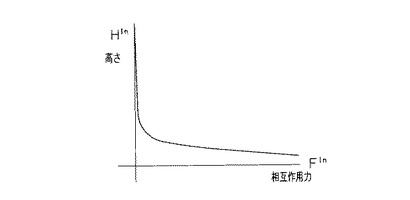
タッピングモード計算手段43は、タッピングモードにおける相互作用力を算出する計算処理を実行する手段である。タッピングモードとは、カンチレバーCの先端の探針が、試料表面に接触したときの影響を考慮するモードである。この場合、カンチレバーCは、探針を介して試料や基板等から、分子間力に基づく相互作用力FInを受ける。このため、タッピングモード計算手段43は、相互作用力FInを算出するための相互作用力算出式を記憶している。この相互作用力FInは、図7に示すように、探針の高さHInの関数になっ
ている。探針の高さHInは、カンチレバーCの先端の高さに依存するため、本実施形態で
は、相互作用力FInは、カンチレバーCの先端の変位h(z)を用いて算出される。タッピ
ングモード計算手段43は、タッピングモードの場合には、カンチレバーCの先端(z=L)の変位h(z)を取得して、相互作用力を算出して、梁変形計算手段44に供給する。
【0041】
梁変形計算手段44は、1次元の梁としてモデル化したカンチレバーCの変形を算出する計算処理を行なう。本実施形態では、タイムステップ毎にカンチレバーCの各格子における変位h(z)と速度[(∂/∂t)h(z;t)]とを算出する。このため、梁変形計算手段4
4は、変位算出式及び速度算出式を記憶している。変位算出式としては、図4に示す(6)式を用いる。また、速度算出式としては、算出した変位h(z)を時間で偏微分(∂/∂t)した式を用いる。本実施形態では、(6)式の変位算出式及び速度算出式は、現タイムステップ及び先のタイムステップにおける変位h(z)を時間発展的に用いた差分法によっ
て算出される。
【0042】
また、梁変形計算手段44は、タッピングモードの場合には、タッピングモード計算手段43が算出した相互作用力を(6)式の右辺に加算して、変位算出式を計算する。
一方、カンチレバー形状可視化手段35は、タイムステップ毎の変位h(z)と速度[(∂/∂t)h(z;t)]とを用いて、シミュレーション画像を生成する手段である。出力する解
析結果がシミュレーション画像の場合には、このカンチレバー形状可視化手段35は、シミュレーション画像をタイムステップ毎に生成して、出力手段15に出力する。
【0043】
振動振幅解析手段36は、変位h(z)と傾き[(∂/∂z)h(z)]とを用いて振動振幅解
析を行なう手段である。本実施形態では、振動振幅解析手段36は、カンチレバーの先端
高さの時間変化解析、カンチレバーの先端高さの振動振幅のスペクトル解析及びカンチレバーの先端傾きの振動振幅スペクトル解析を行なう。振動振幅解析手段36は、それぞれの解析に必要なデータを格子座標データ記憶部24から取得し、各解析結果を配置して表示するグラフを生成するための解析結果データを作成する。
【0044】
カンチレバーの先端高さの時間変化解析においては、振動振幅解析手段36は、時間変化毎のカンチレバーの変位h(z)を取得し、初期高さh0に加算したカンチレバーの先端
高さを算出し、この先端高さの時間依存性を表示するグラフを生成する。
【0045】
カンチレバーの先端高さの振動振幅のスペクトル解析においては、振動振幅解析手段36は、カンチレバーの先端における定常状態での振幅を取得し、振幅の周波数特性を表示するグラフを生成する。
【0046】
カンチレバーの先端傾きの振動振幅スペクトル解析においては、振動振幅解析手段36は、カンチレバーの先端における定常状態での傾きの振れ角を取得し、振れ角の周波数特性を表示するグラフを生成する。
【0047】
振動振幅解析手段36は、入力手段10から入力される解析結果出力指示に応じて、これらの解析結果を出力手段15に出力する。
反射スポット解析手段37は、走査型プローブ顕微鏡の測定信号としてのレーザ光が反射するスポット位置の解析を行なう手段である。反射スポット解析手段37には、レーザ光の出射位置(カンチレバーとの相対位置)に関するデータが記憶されている。更に、反射スポット解析手段37には、カンチレバーの先端の変位h(z=L)及び傾き[(∂/∂z
)h(z=L)]と、レーザ光の位置及び照射方向とを用いて、レーザ光が反射するスポット
位置を算出するスポット位置算出式が記憶されている。反射スポット解析手段37は、カンチレバーの先端の変位h(z=L)を格子座標データ記憶部24から取得し、差分法を用
いて傾き[(∂/∂z)h(z=L)]を算出する。更に、反射スポット解析手段37は、変位h(z=L)及び傾き[(∂/∂z)h(z=L)]とスポット位置算出式とを用いてスポット位置を
算出する。そして、反射スポット解析手段37は、算出したスポット位置を、スポット位置解析結果データ記憶部25に記憶する。
【0048】
次に、上述のように構成されたカンチレバー評価システム20において、カンチレバーCの支持点に強制振動を与えて、液体中でのカンチレバーCの動きを評価するための処理について、図2〜図4及び図8〜図12、図14〜図16を用いて説明する。本実施形態では、制御部21は、タッピングモードが設定された場合の処理について説明する。
【0049】
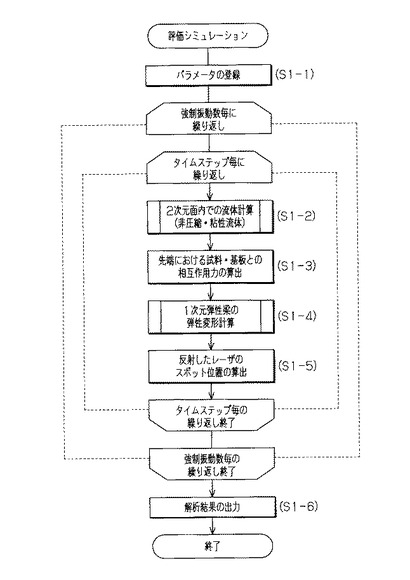
まず、カンチレバーの評価を行なうために、カンチレバー評価プログラムを起動させる。これにより、カンチレバー評価システム20の制御部21は、シミュレーション条件設定画面をディスプレイに表示する。このシミュレーション条件設定画面には、カンチレバーCの形状や強制振動の振幅と周波数の範囲(上限値及び下限値)とを設定するための項目と、開始ボタンとが含まれている。ここで、各項目が設定されて開始ボタンが選択されると、カンチレバー評価システム20の制御部21は、パラメータの登録処理を実行する(ステップS1−1)。本実施形態では、カンチレバー評価システム20の制御部21は、カンチレバーの形状に関する値及び強制振動の振幅及び周波数を取得する。
【0050】
そして、制御部21のパラメータ設定手段31は、カンチレバーの形状に応じた断面積算出式及び断面二次モーメント算出式にカンチレバーCの形状に関する値を代入して、カンチレバーCの断面積S(z)及び断面二次モーメントI(z)を算出し、パラメータデータ記憶部22に記憶する。そして、連成計算手段34は、強制振動設定手段32に設定された周波数毎に強制振動を変更しながら、シミュレーションの計算を繰り返す。この場合、制
御部21のタイムステップ制御手段33によって設定されたタイムステップ毎に、以下の処理を繰り返す。
【0051】
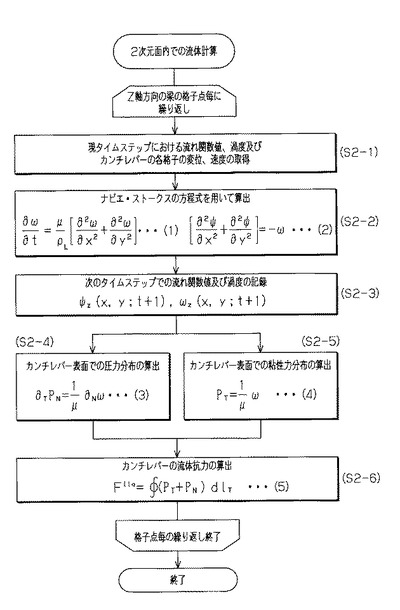
次に、カンチレバー評価システム20の制御部21は、2次元面内での流体計算処理を実行する(ステップS1−2)。この2次元面内での流体計算処理を、図3を用いて具体的に説明する。この流体計算処理においては、Z軸方向の梁の格子点毎(各計算対象面)に、以下で説明するステップS2−1〜S2−6の処理が繰り返して実行される。
【0052】
この流体計算処理において、まず、制御部21の連成計算手段34は、現タイムステップにおける流れ関数値ψz(x,y;t)、渦度ωz(x,y;t)、カンチレバーCの変位h(z;t)及び
速度[(∂/∂t)h(z;t)]の取得処理を実行して、計算対象面を特定する(ステップS2−1)。具体的には、連成計算手段34の流体運動計算手段41は、流体分布データ記憶部23から、現タイムステップにおける流れ関数値ψz(x,y;t)、渦度ωz(x,y;t)を取得する。流体運動計算手段41は、格子座標データ記憶部24から、カンチレバーCの変位h(z;t)及び速度[(∂/∂t)h(z;t)]を取得する。
【0053】
次に、制御部21の連成計算手段34は、ナビエ・ストークスの方程式を用いて、次のタイムステップでの流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)の算出処理を実行する(ステップS2−2)。具体的には、連成計算手段34の流体運動計算手段41は、まず、流体の密度ρL及び粘性率μをパラメータデータ記憶部22から取得する。次に、流体運動計算手段41は、ステップS2−1で取得した流れ関数値ψz(x,y;t)及び渦度ωz(x,y;t)と、カンチレバーの変位h(z;t)及び速度[(∂/∂t)h(z;t)]に応じた境界条件と
、流体の密度ρL及び粘性率μを、ナビエ・ストークスの方程式に代入する。これにより、次のタイムステップの流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)を算出する。
【0054】
次に、制御部21の連成計算手段34は、次のタイムステップでの流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)を記録する(ステップS2−3)。具体的には、連成計算手段34の流体運動計算手段41は、算出したタイムステップでの流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)を流体分布データ記憶部23に記憶する。
【0055】
次に、制御部21の連成計算手段34は、カンチレバー表面での圧力分布PNの算出処理を実行する(ステップS2−4)。具体的には、連成計算手段34の流体抗力計算手段42は、まず、流体の粘性率μをパラメータデータ記憶部22から取得する。更に、流体抗力計算手段42は、流れ関数値ψz(x,y)を流体分布データ記憶部23から取得する。そして、流体抗力計算手段42は、取得した粘性率μ及び流れ関数値ψz(x,y)を流体圧力算出式に代入して、カンチレバー表面での圧力分布PNを算出する。
【0056】
また、制御部21の連成計算手段34の流体抗力計算手段42は、カンチレバー表面での粘性力分布PTの算出処理を実行する(ステップS2−5)。具体的には、連成計算手段34の流体抗力計算手段42は、まず、流体の粘性率μをパラメータデータ記憶部22から取得する。更に、流体抗力計算手段42は、流体分布データ記憶部23から流れ関数値ψz(x,y)を取得する。そして、流体抗力計算手段42は、取得した粘性率μ及び流れ関数値ψz(x,y)を流体粘性力算出式に代入して、カンチレバー表面での粘性力分布PTを算出する。
【0057】
そして、制御部21の連成計算手段34は、カンチレバーの流体抗力Fliqの算出処理
を実行する(ステップS2−6)。具体的には、連成計算手段34の流体抗力計算手段42は、まず、カンチレバーの長さLをパラメータデータ記憶部22から取得する。流体抗力計算手段42は、カンチレバーの長さLと、算出したカンチレバー表面での圧力分布PN及び粘性力分布PTとを流体抗力算出式に代入して、カンチレバー全体に加わる流体抗
力Fliqを算出し、梁変形計算手段44に供給する。
以上により、2次元面内での流体計算を終了し、図2に示す評価シミュレーションに戻る。
【0058】
次に、タッピングモードが設定されているため、制御部21の連成計算手段34は、先端における試料・基板との相互作用力の算出処理を実行する(ステップS1−3)。具体的には、連成計算手段34のタッピングモード計算手段43は、先のタイムステップにおけるカンチレバーCの先端(z=L)の変位h(z)を、格子座標データ記憶部24から取得する。そして、タッピングモード計算手段43は、取得した変位h(z)を相互作用力算出
式に代入して相互作用力を算出し、梁変形計算手段44に供給する。
【0059】
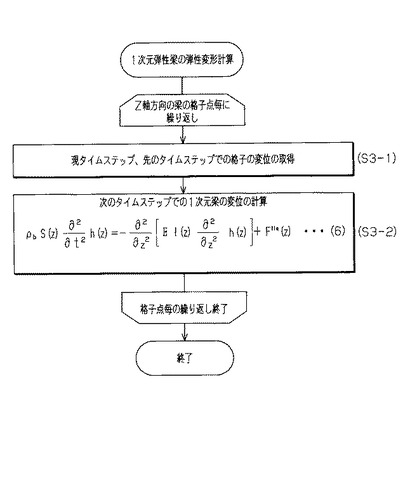
次に、カンチレバー評価システム20の制御部21は、1次元弾性梁の弾性変形計算処理を実行する(ステップS1−4)。この弾性変形計算処理を、図4を用いて具体的に説明する。この弾性変形計算処理においては、Z軸方向の梁の格子点毎に、以下で説明するステップS3−1〜S3−2の処理が繰り返して実行される。
【0060】
この弾性変形計算処理においては、まず、制御部21の連成計算手段34は、現タイムステップ及び先のタイムステップにおける各格子の変位の取得処理を実行する(ステップS3−1)。具体的には、連成計算手段34の梁変形計算手段44は、格子座標データ記憶部24から、現タイムステップ(t)及び先のタイムステップ(t−1)における座標zにある各格子の変位h(z)を取得する。
【0061】
次に、連成計算手段34の梁変形計算手段44は、次のタイムステップでの1次元梁の変位の計算処理を実行する(ステップS3−2)。具体的には、連成計算手段34の梁変形計算手段44は、まず、カンチレバーCを構成する材料の密度ρb及びヤング率E、カンチレバーCの断面積S(z)及び断面二次モーメントI(z)とをパラメータデータ記憶部22から取得する。梁変形計算手段44は、ステップS3−1において取得した各格子の変位h(z;t)を変位算出式に代入して、次のタイムステップにおける各格子の変位h(z;t+1)を算出する。この場合、タッピングモードであるので、梁変形計算手段44は、相互作用力FInを(6)式の右辺に加算して、変位算出式を計算する。
【0062】
更に、梁変形計算手段44は、ステップS3−1において取得した変位h(z)を速度算
出式に代入して、次のタイムステップにおける各格子の速度[(∂/∂t)h(z)]を算出する。そして、梁変形計算手段44は、算出した各格子の変位h(z)及び速度[(∂/∂t)
h(z)]を格子座標データ記憶部24に記憶する。
【0063】
次に、制御部21の連成計算手段34は、反射したレーザのスポット位置の算出処理を実行する(ステップS1−5)。具体的には、連成計算手段34の反射スポット解析手段37は、カンチレバーの先端の変位h(z=L)を格子座標データ記憶部24から取得する
。反射スポット解析手段37は、取得した変位h(z=L)から傾き[(∂/∂z)h(z=L)]
を算出する。そして、反射スポット解析手段37は、変位h(z=L)及び傾き[(∂/∂z
)h(z=L)]をスポット位置算出式に代入して、スポット位置を算出し、スポット位置解析結果データ記憶部25に記憶する。以上により、1のタイムステップの処理が完了する。
【0064】
そして、カンチレバー評価システム20の制御部21は、タイムステップ毎に、ステップS1−2〜S1−5を繰り返して実行する。具体的には、制御部21のタイムステップ制御手段33が、1のタイムステップにおけるすべての格子点についての計算が終了すると、このタイムステップに「1」を加算した次のタイムステップにおける格子点について処理を実行する。
【0065】
そして、算出したタイムステップが終了タイムステップより大きくなった場合には、次の強制振動の周波数を設定する。具体的には、強制振動設定手段32が、設定している強制振動の周波数に所定周波数を加算した次の強制振動の周波数を算出し、連成計算手段34に供給する。
【0066】
そして、算出した強制振動の周波数が、強制振動の上限値よりも大きくなった場合には、カンチレバー評価システム20の制御部21は、解析結果の出力処理を実行する(ステップS1−6)。具体的には、制御部21のカンチレバー形状可視化手段35、振動振幅解析手段36や反射スポット解析手段37が、解析結果に関するデータを生成して、出力手段15に出力する。
【0067】
(解析結果)
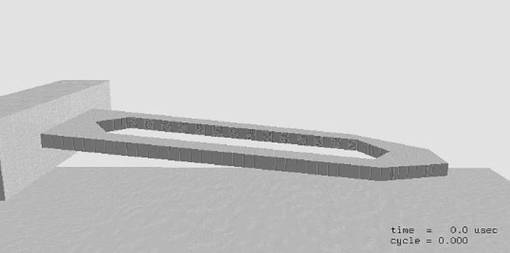
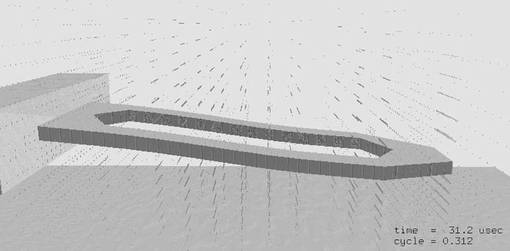
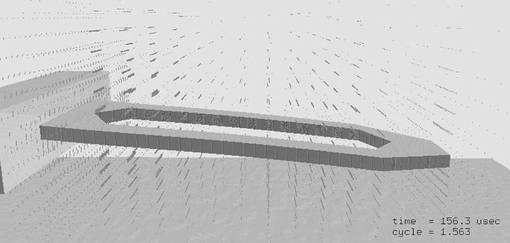
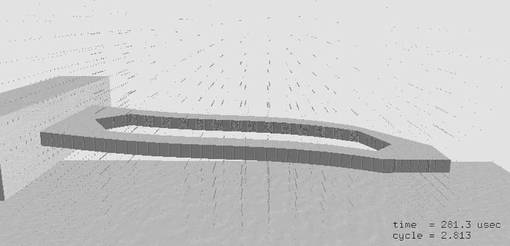
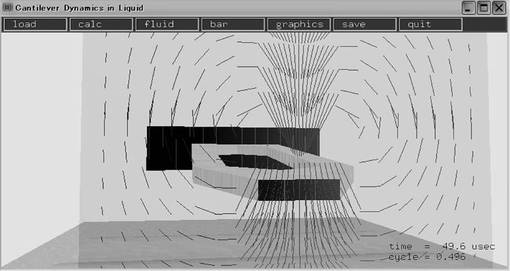
カンチレバー形状可視化手段35は、カンチレバーCの挙動を動画でディスプレイに表示する。図8〜図12には、特定時間におけるカンチレバーCの挙動の静止画の一例が表示されている。ここで、図8〜図11は、図番が大きくなるにつれて、強制振動が供給されてからの経過時間が長くなっている状態を示している。図12は、図8〜図11とは異なる方向から見たカンチレバーCを示している。図9〜図12には、各座標点におけるX方向の変位及び傾きが考慮されて、各時間における変形したカンチレバーCが表示されている。また、図9〜図12には、カンチレバーCの周辺の流体の動きのベクトルも表示されている。
【0068】
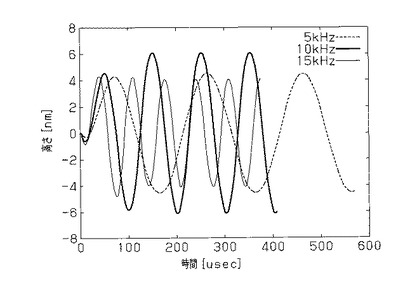
また、振動振幅解析手段36は、図14に示すように、強制振動の周波数に応じたカンチレバーCの先端の高さの時間変化をディスプレイに表示する。図14においては、カンチレバーCの支持点に供給された強制振動の周波数が、5[kHz]、10[kHz]及び15[kHz]の場合を示している。
【0069】
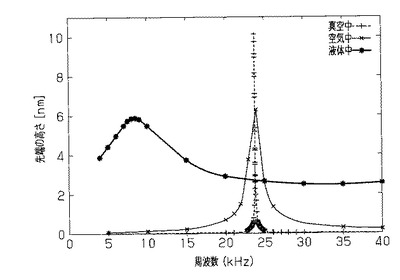
振動振幅解析手段36は、図15に示すように、液体中のカンチレバーCの先端の高さの振動振幅のスペクトルをディスプレイに表示する。この図15には、真空中及び大気中にあるカンチレバーCの先端の高さの振動振幅のスペクトルも合わせて表示されている。
【0070】
振動振幅解析手段36は、図16に示すように、液体中のカンチレバーCの先端の傾きの振動振幅のスペクトルをディスプレイに表示する。この図16には、真空中及び大気中にあるカンチレバーCの先端の高さの振動振幅のスペクトルも合わせて表示されている。
【0071】
本実施形態によれば、以下のような効果を得ることができる。
・ 本実施形態では、カンチレバー評価システム20の制御部21は、2次元面内での流体計算処理を実行する(ステップS1−2)。この場合、制御部21は、取得した流れ関数値ψz(x,y;t)及び渦度ωz(x,y;t)と、カンチレバーの変位h(z;t)及び速度[(∂/∂
t)h(z;t)]に応じた境界条件とを用いて、次のタイムステップの流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)を算出する(ステップS2−3)。制御部21は、算出した流れ関数値ψz(x,y)及び渦度ωz(x,y)を用いてカンチレバーの流体抗力を算出する。制御部21は、1次元弾性梁の弾性変形計算処理を実行する(ステップS1−4)。この場合、算出した流体抗力を変位算出式に代入して、次のタイムステップでの1次元梁の変位h(z;t+1)の計算処理を実行する(ステップS3−2)。そして、これらステップS1−2及び
ステップS1−4をそれぞれ格子点毎(計算対象面毎)に繰り返し、更に、それをタイムステップ毎に繰り返す。
【0072】
すなわち、カンチレバーCの変位h(z;t)を境界条件として用いた流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)を計算し、これら流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)から算出した流体抗力Fliqを用いてカンチレバーCの変位h(z;t+1)を算出することを
交互に繰り返す。従って、カンチレバーCから液体への影響を考慮した式と、液体からカンチレバーへの影響を考慮した式とを連立させて計算を行なうので、カンチレバーCとその周辺の流体の挙動も含めた総合的な数値シミュレーションを行なうことができる。この場合、カンチレバーCをモデル化した1次元に直交する2次元面で液体をモデル化しているので、全体として3次元の挙動をシミュレーションすることができる。従って、このシミュレーションによってカンチレバーの挙動の評価を行なうことができ、精度の高い測定が可能なカンチレバーの設計やカンチレバーの変形を考慮した測定信号の解析に役立てることができる。また、カンチレバーCを1次元にモデル化し、流体を2次元でモデル化しているので、それぞれの計算は、3次元モデルの計算よりもはるかに簡単であり、計算負荷を軽減することができる。
【0073】
・ 本実施形態では、制御部21の梁変形計算手段44は、(6)式の変位算出式を用いてカンチレバーCの変形を算出する。この(6)式には、カンチレバーの構造パラメータ(断面積S(z)及び断面二次モーメントI(z))が含まれる。これら断面積S(z)及び断
面二次モーメントI(z)は、カンチレバーCがモデル化した1次元とは異なる方向の形状
に関するパラメータ(幅及び高さ)から算出される値である。このため、モデル化した1次元とは異なる他の2次元の要素もカンチレバーCの計算に影響を与えることになるため、全体として3次元の挙動をより正確にシミュレーションすることができる。
【0074】
・ 本実施形態では、カンチレバー評価システム20の制御部21は、先端における試料・基板との相互作用力FInの算出処理を実行する(ステップS1−3)。制御部21は、1次元弾性梁の弾性変形計算処理(ステップS1−4)において、算出した相互作用力FInを(6)式の右辺に加算して、変位算出式を計算する。このため、カンチレバーCとその周辺の液体との挙動だけでなく、探針が試料や基板から受ける相互作用力も含めた総合的な数値シミュレーションを行なうことができる。
【0075】
・ 本実施形態では、カンチレバー評価システム20の制御部21は、反射したレーザ光のスポット位置の算出処理を実行する(ステップS1−5)。この場合、制御部21は、カンチレバーの先端の変位h(z=L)及び傾き[(∂/∂z)h(z=L)]をスポット位置算
出式に代入して、スポット位置を算出する。例えば、図13(a)に示すカンチレバーC1及び図13(b)に示すカンチレバーC2のように、変位h(z=L)が同じであっても
傾き[(∂/∂z)h(z=L)]が異なる場合がある。この場合には、反射されるレーザ光LL1,LL2のスポット位置が異なる。反射したレーザ光が、走査型プローブ顕微鏡の計測信号となるので、傾き[(∂/∂z)h(z=L)]を用いてスポット位置を算出することにより、このレーザ光のスポット位置をより的確に把握して、計測信号をより正確に取得することができる。
【0076】
・ 本実施形態では、カンチレバー評価システム20の制御部21は、カンチレバーに印加する強制振動を設定する処理を行なう。この場合、制御部21の強制振動設定手段32は、指定された強制振動の振幅と周波数の範囲において、所定周波数間隔毎の周波数を、順次、連成計算手段34に供給する。1つの周波数について終了タイムステップまで算出すると、強制振動設定手段32は、その周波数に所定周波数を加算した次の強制振動の周波数を算出し、連成計算手段34に供給する。このため、異なる強制振動を与えたときのカンチレバーの先端高さの時間依存性や、振動振幅スペクトル等に基づいてカンチレバーを評価することができる。
【0077】
・ 本実施形態では、解析結果として、制御部21のカンチレバー形状可視化手段35は、カンチレバーCの挙動を動画でディスプレイに表示する。このため、カンチレバーC及び流体の挙動を動画で把握することができる。
【0078】
・ 本実施形態では、解析結果として、制御部21の振動振幅解析手段36は、図14に示すように、強制振動の周波数に応じたカンチレバーCの先端の高さの時間変化をディスプレイに表示する。この図14から、カンチレバーCの支持点に供給される強制振動の周波数によって、先端の振動振幅が変化していることがわかる。
【0079】
・ 本実施形態では、解析結果として、制御部21の振動振幅解析手段36は、図15に示すように、液体中のカンチレバーCの先端の高さの振動振幅のスペクトルをディスプレイに表示する。この図15から、液体中のカンチレバーCの共鳴ピークは、真空中や大気中のカンチレバーCに比べて、鈍いことがわかる。
【0080】
・ 本実施形態では、解析結果として、制御部21の振動振幅解析手段36は、図16に示すように、液体中のカンチレバーCの先端の傾きの振動振幅のスペクトルをディスプレイに表示する。この図16から、液体中のカンチレバーCの先端の傾きは、高周波数で増長されていることがわかる。
【0081】
また、上記実施形態は、以下のように変更してもよい。
○ 上記実施形態において、タッピングモードの場合の評価シミュレーションについて説明したが、タッピングモードを含めないでシミュレーションを行なってもよい。この場合には、上述したステップS1−3の処理を省略する。更に、シミュレーション条件設定画面に、タッピングモードの利用希望の有無を選択できるように構成してもよい。
【0082】
○ 上記実施形態において、制御部21は、タイムステップ毎に反射したレーザのスポット位置の算出処理を実行した(ステップS1−5)。スポット位置の算出するタイミングはこれに限られるものではなく、制御部21は、解析結果の出力処理(ステップS1−6)において、反射したレーザの各スポット位置の算出処理をまとめて実行してもよい。
【0083】
○ 上記実施形態において、カンチレバー評価システム20の制御部21は、カンチレバーに印加する強制振動を設定した。この場合、制御部21は、指定された強制振動の周波数の範囲において、所定周波数間隔毎の強制振動の周波数を、順次、連成計算手段34に供給した。連成計算手段34に供給する周波数間隔はこれに限らず、自動的に変更してもよい。例えば、共鳴振動数付近の周波数においては、シミュレーションする周波数の間隔を狭くして計算を実行してもよい。共鳴振動数付近では、カンチレバーCの支持点と先端との振動振幅の位相差が「π/2」である。そこで、カンチレバーCの支持点の変位と先端の変位との位相差から共鳴振動数を推定し、共鳴振動数の近傍については、より狭い周波数間隔の周波数を設定してシミュレーションを実行する。具体的には、制御部21の強制振動設定手段32に、狭い周波数間隔でシミュレーションを行なう位相差範囲に関するデータを記憶させておく。そして、強制振動設定手段32は、カンチレバーCにおける支持点の高さの振動波形と先端の高さの振動波形から、これら振動の位相差を算出し、この位相差と位相差範囲とを比較して、位相差範囲内である周波数を特定する。そして、この周波数の近傍の所定範囲において、強制振動設定手段32は、狭い間隔(例えば、0.2[kHz])の周波数を設定して連成計算手段34に供給する。ここでは、特定した周波数の低周波側の設定周波数と高周波側の設定周波数との間を近傍の所定範囲とする。この場合、共鳴振動数付近の周波数については、自動的に振動振幅を詳細に解析することができる。
【0084】
○ 上記実施形態において、カンチレバー評価プログラムを起動させた場合に出力されるシミュレーション条件設定画面において、カンチレバーCの形状や強制振動の振幅及び周波数の範囲を設定した。ここで、カンチレバーの材料や流体の材料物性値を設定できるようにしてもよい。また、カンチレバー評価システム20に、物質名と材料物性値とを関連付けた物性定数テーブルを保持させておき、指定された物質名に応じてシミュレーショ
ンに用いる材料物性値を決定するようにしてもよい。
【図面の簡単な説明】
【0085】
【図1】本発明のカンチレバー評価システムの概略構成図。
【図2】評価シミュレーションの処理手順を説明するための流れ図。
【図3】2次元面内での流体計算の処理手順を説明するための流れ図。
【図4】1次元弾性梁の弾性変形計算の処理手順を説明するための流れ図。
【図5】カンチレバーの一次元弾性梁モデルを説明するための説明図。
【図6】カンチレバー周辺の液体の二次元流体モデルを説明するための説明図。
【図7】カンチレバーの探針の高さと相互作用力の関係を説明するための説明図。
【図8】水溶液中カンチレバー振動解析シミュレーション画像を説明する説明図。
【図9】水溶液中カンチレバー振動解析シミュレーション画像を説明する説明図。
【図10】水溶液中カンチレバー振動解析シミュレーション画像を説明する説明図。
【図11】水溶液中カンチレバー振動解析シミュレーション画像を説明する説明図。
【図12】水溶液中カンチレバー振動解析シミュレーション画像を説明する説明図。
【図13】レバーの変形と反射スポットの対応関係を説明する説明図であって、(a)は低周波数の場合、(b)は共鳴振動数以上の高周波数の場合を示す。
【図14】強制振動の周波数に応じたカンチレバーの先端の高さの時間変化を説明する説明図。
【図15】カンチレバーの先端の高さの振動振幅のスペクトルを説明する説明図。
【図16】カンチレバーの先端の傾きの振動振幅のスペクトルを説明する説明図。
【符号の説明】
【0086】
C…カンチレバー、Fliq…流体抗力、h(z)…変位、x,y,z…座標、10…入力手段、15…出力手段、20…カンチレバー評価システム、21…制御部、22…パラメータデータ記憶部、23…流体分布データ記憶部、24…格子座標データ記憶部、25…スポット位置解析結果データ記憶部、31…パラメータ設定手段、32…強制振動設定手段、33…タイムステップ制御手段、34…連成計算手段、35…カンチレバー形状可視化手段、36…振動振幅解析手段、37…反射スポット解析手段、41…流体運動計算手段、42…流体抗力計算手段、43…タッピングモード計算手段、44…梁変形計算手段。
【技術分野】
【0001】
本発明は、流体中でのカンチレバーの振動特性のコンピュータによる数値シミュレーション解析に使用され、カンチレバーの設計等を支援するためのカンチレバー評価システム、カンチレバー評価方法及びカンチレバー評価プログラムに関するものである。
【背景技術】
【0002】
試料表面の細かい形状や性質を測定するために、走査型プローブ顕微鏡(SPM;Scanning Probe Microscope)が利用されている。この走査型プローブ顕微鏡は、探針を試料
に近づけて、探針と試料との間に発生する原子間力の引力や斥力、電流(トンネル電流)などの物理的現象を測定する。これにより、試料表面の形状や性質を原子レベルで測定することができる。
【0003】
このような走査型プローブ顕微鏡においては、カンチレバーの先端に探針を設け、この探針の上下動を測定する(例えば、特許文献1を参照。)。この場合、カンチレバーの背面にレーザ光を照射し、その反射ビームの位置によって、探針の上下動を測定する。従って、カンチレバーの動きが、探針による測定精度に影響を与えることになる。
【0004】
また、今日、溶液中の試料により測定を行なう原子間力顕微鏡も検討されている(例えば、特許文献2を参照。)。
【特許文献1】特開平5−71951号公報(第1頁)
【特許文献2】特開平11−118813号公報(第1頁)
【発明の開示】
【発明が解決しようとする課題】
【0005】
通常、このような走査型プローブ顕微鏡は、真空中や大気中で測定することが多い。そこで、従来から、カンチレバー単体の振動・変形特性の数値シミュレーションによる解析は行なわれている。
【0006】
一方、走査型プローブ顕微鏡の測定対象は多様化しており、特許文献2のようにバイオ分野等では水溶液等の中で測定しなければならないこともある。このような水溶液中では、強い流体抗力を受けてカンチレバーの振動・変形特性が変化する。
【0007】
しかし、カンチレバーを用いた原子間力顕微鏡像の従来の数値シミュレーションでは、カンチレバー先端に付加された探針と試料・基板との相互作用のみが計算され、カンチレバーと水溶液を含めた総合的な数値シミュレーションは行なわれていない。
【0008】
一方、従来においても、流体の数値シミュレーションは数多く行なわれているが、障害物であるカンチレバーの弾性変形と連成させた数値シミュレーションも行なわれていない。
【0009】
更に、従来のシミュレーションでは、探針の試料との接触高さを測定信号と直接関係する測定量として計算していた。しかし、現実には、カンチレバー先端に照射されたレーザ光線の反射スポットの位置が測定信号である。この現実の測定状況に即した数値シミュレーションも行なわれていない。
【0010】
本発明は、上述の問題に鑑みてなされ、精度の高い測定が可能なカンチレバーの設計や
カンチレバーの変形を考慮した測定信号の解析のために、流体中のカンチレバーの挙動を評価することができるカンチレバー評価システム、カンチレバー評価方法及びカンチレバー評価プログラム提供することにある。
【課題を解決するための手段】
【0011】
上記問題点を解決するために、請求項1に記載の発明は、カンチレバーの形状に基づく構造パラメータと、前記カンチレバーを構成する材料の材料物性値と、前記カンチレバーの周辺の流体の流体物性値とを含むパラメータを記憶したパラメータデータ記憶手段と、前記カンチレバーを1次元の片持ち梁構造体としてモデル化したときの前記梁構造体の長手方向の各梁格子点の変位に関するデータを記憶する梁格子座標データ記憶手段と、各梁格子点をそれぞれ含み前記長手方向に対して直交する面における前記流体の流体分布に関するデータを記憶する流体分布データ記憶手段と、前記カンチレバーの振動特性を算出する制御手段とを備えたカンチレバー評価システムであって、前記制御手段が、前記片持ち梁構造体の支持点に強制振動を印加した場合の支持点の変位を、タイムステップ毎に前記梁格子座標データ記憶手段に記録する手段と、計算対象の梁格子点を特定する手段と、前記特定した梁格子点毎に、先のタイムステップにおける前記梁格子点の変位を前記梁格子座標データ記憶手段から取得し、この変位を境界条件として用いて、計算対象の格子点を含む計算対象面における流体分布を、前記パラメータデータ記憶手段に記録された流体物性値及び前記流体分布データ記憶手段に記憶された流体分布を用いて算出する手段と、算出した流体分布と、前記パラメータデータ記憶手段に記録された前記流体物性値を用いて流体抗力を算出する手段と、前記流体抗力と、前記パラメータデータ記憶手段に記録された構造パラメータ及び材料物性値を用いた片持ち梁構造体の運動方程式を計算して、前記計算対象の格子点の座標を算出して、前記梁格子座標データ記憶手段に記憶する手段と、各計算対象の格子点の座標の算出を繰り返して行なうタイムステップ制御手段とを備えたことを要旨とする。
【0012】
請求項2に記載の発明は、請求項1に記載のカンチレバー評価システムにおいて、前記制御手段は、前記強制振動の周波数を、所定の範囲で順次変更する強制振動設定手段と、強制振動の周波数毎に前記片持ち梁構造体の先端の振幅を算出し、この振動の周波数特性を出力する手段とを更に備えたことを要旨とする。
【0013】
請求項3に記載の発明は、請求項1又は2に記載のカンチレバー評価システムにおいて、前記制御手段は、前記片持ち梁構造体の先端の格子点において、前記カンチレバーの先端に設けられた探針が測定試料及びこの試料の基板から受ける作用力を算出する手段を更に備え、前記制御手段は、この作用力を含む片持ち梁構造体の運動方程式を計算することを要旨とする。
【0014】
請求項4に記載の発明は、請求項1〜3のいずれか1項に記載のカンチレバー評価システムにおいて、前記カンチレバーの先端の格子点の座標と、この格子点に隣接する格子点の座標から先端部の傾斜角度を算出する手段と、前記格子点の座標及び傾斜角度を用いて、前記先端の格子点に照射したレーザの反射光路を特定して反射スポットの位置を算出する手段とを更に備えたことを要旨とする。
【0015】
請求項5に記載の発明は、カンチレバーの形状に基づく構造パラメータと、前記カンチレバーを構成する材料の材料物性値と、前記カンチレバーの周辺の流体の流体物性値とを含むパラメータを記憶したパラメータデータ記憶手段と、前記カンチレバーを1次元の片持ち梁構造体としてモデル化したときの前記梁構造体の長手方向の各梁格子点の変位に関するデータを記憶する梁格子座標データ記憶手段と、各梁格子点をそれぞれ含み前記長手方向に対して直交する面における前記流体の流体分布に関するデータを記憶する流体分布データ記憶手段と、制御手段とを備え、前記カンチレバーの振動特性を算出するためのカ
ンチレバー評価方法であって、前記制御手段が、前記片持ち梁構造体の支持点に強制振動を印加した場合の支持点の変位を、タイムステップ毎に前記梁格子座標データ記憶手段に記録する段階と、計算対象の梁格子点を特定する段階と、前記特定した梁格子点毎に、先のタイムステップにおける前記梁格子点の変位を前記梁格子座標データ記憶手段から取得し、この変位を境界条件として用いて、計算対象の格子点を含む計算対象面における流体分布を、前記パラメータデータ記憶手段に記録された流体物性値及び前記流体分布データ記憶手段に記憶された流体分布を用いて算出する段階と、算出した流体分布と、前記パラメータデータ記憶手段に記録された前記流体物性値を用いて流体抗力を算出する段階と、前記流体抗力と、前記パラメータデータ記憶手段に記録された構造パラメータ及び材料物性値を用いた片持ち梁構造体の運動方程式を計算して、前記計算対象の格子点の座標を算出して、前記梁格子座標データ記憶手段に記憶する段階と、各計算対象の格子点の座標の算出を繰り返して行なうタイムステップ制御段階とを実行することを要旨とする。
【0016】
請求項6に記載の発明は、カンチレバーの形状に基づく構造パラメータと、前記カンチレバーを構成する材料の材料物性値と、前記カンチレバーの周辺の流体の流体物性値とを含むパラメータを記憶したパラメータデータ記憶手段と、前記カンチレバーを1次元の片持ち梁構造体としてモデル化したときの前記梁構造体の長手方向の各梁格子点の変位に関するデータを記憶する梁格子座標データ記憶手段と、各梁格子点をそれぞれ含み前記長手方向に対して直交する面における前記流体の流体分布に関するデータを記憶する流体分布データ記憶手段と、制御手段とを備え、前記カンチレバーの振動特性を算出するためのカンチレバー評価プログラムであって、前記制御手段を、前記片持ち梁構造体の支持点に強制振動を印加した場合の支持点の変位を、タイムステップ毎に前記梁格子座標データ記憶手段に記録する手段、計算対象の梁格子点を特定する手段、前記特定した梁格子点毎に、先のタイムステップにおける前記梁格子点の変位を前記梁格子座標データ記憶手段から取得し、この変位を境界条件として用いて、計算対象の格子点を含む計算対象面における流体分布を、前記パラメータデータ記憶手段に記録された流体物性値及び前記流体分布データ記憶手段に記憶された流体分布を用いて算出する手段、算出した流体分布と、前記パラメータデータ記憶手段に記録された前記流体物性値を用いて流体抗力を算出する手段、前記流体抗力と、前記パラメータデータ記憶手段に記録された構造パラメータ及び材料物性値を用いた片持ち梁構造体の運動方程式を計算して、前記計算対象の格子点の座標を算出して、前記梁格子座標データ記憶手段に記憶する手段、及び各計算対象の格子点の座標の算出を繰り返して行なうタイムステップ制御手段として機能することを要旨とする。
【0017】
(作用)
請求項1、5又は6に記載の発明によれば、制御手段は、カンチレバーを片持ち梁構造体としてモデル化し、カンチレバー周辺の流体を、各梁格子点をそれぞれ含み長手方向に対して直交する2次元の面において挙動する流体としてモデル化する。更に、片持ち梁構造体に強制振動を印加した場合の支持点における各タイムステップの振幅を梁格子座標データ記憶手段に記録する。そして、制御手段は、タイムステップ毎に、各梁格子点の先のタイムステップの変位を境界条件として用いて、各梁格子点を含む計算対象面における流体分布を、流体物性値及び過去の流体分布を用いて算出する。次に、制御手段は、算出した流体分布と流体物性値を用いて流体抗力を算出し、この流体抗力、構造パラメータ及び材料物性値を用いて片持ち梁構造体の運動方程式を計算して、計算対象の格子点の座標を算出して、梁格子座標データ記憶手段に記憶する。制御手段は、このようなステップ毎の処理を、梁格子点毎に繰り返して行なう。
【0018】
このため、カンチレバーの変形を境界条件として用いて流体分布を計算し、算出した流体抗力を用いてカンチレバーの変形を計算することを交互に繰り返す。従って、カンチレバーから流体への影響を考慮した式と、流体からカンチレバーへの影響を考慮した式とを連立させて計算を行なうので、カンチレバーとその周辺の流体の挙動も含めた総合的な数
値シミュレーションを行なうことができる。更に、この場合、カンチレバーをモデル化した1次元に直交する2次元面で流体をモデル化することにより、全体として3次元の挙動をシミュレーションすることができる。従って、カンチレバーの挙動を効率的かつ的確に評価し、精度の高い測定が可能なカンチレバーの設計やカンチレバーの変形を考慮した測定信号の解析に役立てることができる。また、カンチレバーを1次元にモデル化し、流体を2次元でモデル化しているので、それぞれの計算は、3次元モデルの計算よりも簡単であり、計算負荷を軽減することができる。
【0019】
請求項2に記載の発明によれば、制御手段は、強制振動の周波数を、所定の範囲で順次変更して、強制振動の周波数毎に片持ち梁構造体の先端の振幅を算出し、振動の周波数特性を出力する。このため、異なる強制振動を与えたときのカンチレバーの先端高さの時間依存性や、振動振幅スペクトル等を自動的に生成することができるので、これらに基づいてカンチレバーを評価することができる。
【0020】
請求項3に記載の発明によれば、制御手段は、片持ち梁構造体の先端の格子点において、カンチレバーの先端が測定試料及びこの試料の基板から受ける作用力を算出し、この作用力を含む片持ち梁構造体の運動方程式を計算する。このため、カンチレバーとその周辺の流体との挙動だけでなく、探針が試料や基板から受ける相互作用力も含めた総合的な数値シミュレーションを行なうことができる。
【0021】
請求項4に記載の発明によれば、制御手段は、カンチレバーの先端の格子点の座標と、この格子点に隣接する格子点の座標から先端部の傾斜角度を算出する。制御手段は、格子点の座標及び傾斜角度を用いて、先端の格子点に照射したレーザの反射光路を特定して反射スポットの位置を算出する。反射したレーザの信号が、走査型プローブ顕微鏡の計測信号となるので、このレーザのスポット位置を算出して計測信号を取得することができる。
【発明の効果】
【0022】
本発明によれば、流体中のカンチレバーの挙動を効率的に評価することにより、精度の高い測定が可能なカンチレバーの設計やカンチレバーの変形を考慮した測定信号の解析に役立てることができる。
【発明を実施するための最良の形態】
【0023】
以下、本発明を具体化したカンチレバー評価システムの一実施形態を図1〜図16に基づいて説明する。本実施形態のカンチレバー評価システムは、水溶液の液体中で測定を行なう走査型プローブ顕微鏡のカンチレバーの振動特性を、シミュレーションの解析結果によって評価する。この振動特性の評価は、精度の高い測定が可能なカンチレバーの設計やカンチレバーの変形を考慮した測定信号の解析を行なうために用いられる。
【0024】
解析結果を求めるシミュレーションにおいては、図5に示すように、カンチレバーCの断面分布を考慮して、カンチレバーCを、Z軸方向に延びる1次元の梁(梁構造体)としてモデル化する。この場合、カンチレバーはX軸方向に微小変動すると仮定する。また、図6に示すように、カンチレバー周辺の液体を、非圧縮性の粘性流体としてモデル化する。この場合、液体は、Z軸方向にほぼ一様な流れでありZ方向成分を無視し、カンチレバーの延在方向(Z軸方向)の断面の限られた2次元の面(XY面)において挙動すると仮定する。そして、モデル化したカンチレバーの梁の変形振動と、その周辺に存在する液体を2次元流体とする運動の方程式とを連成させる。そして、この連成により、カンチレバーCの先端の高さ及び傾きの時間変化を計算し、その定常振動振幅を計算する。
【0025】
図1に示すように、本実施形態におけるカンチレバー評価システム20は、入力手段10及び出力手段15を備える。
入力手段10は、シミュレーション条件やパラメータ等の各種データや指示データを入力するための手段である。本実施形態では、シミュレーション条件として、強制振動の設定データやモードの設定データが用いられる。また、パラメータとして、カンチレバーを構成する材料や液体の物性値(カンチレバーの材料の密度ρb及びヤング率E、液体の密度ρL及び粘性率μ等)やカンチレバーの形状に関する値(形状、幅A、高さB及び長さL)が用いられる。入力手段10は、入力された各種データや指示データをカンチレバー評価システム20に供給する。
【0026】
出力手段15は、カンチレバー評価システム20の評価結果を出力するための手段(例えば、ディスプレイ)である。本実施形態では、出力手段15を介して、シミュレーション画像や振動解析のグラフを表示させて出力する。
【0027】
カンチレバー評価システム20は、制御部21、パラメータデータ記憶部22、流体分布データ記憶部23、格子座標データ記憶部24及びスポット位置解析結果データ記憶部25を備えている。ここで、パラメータデータ記憶部22はパラメータデータ記憶手段として機能し、流体分布データ記憶部23は流体分布データ記憶手段として機能し、格子座標データ記憶部24は梁格子座標データ記憶手段として機能する。
【0028】
制御部21は、カンチレバーの振動特性を算出する制御手段として機能することにより、後述する処理を行なう。このため、カンチレバー評価プログラムを実行することにより、制御部21は、パラメータ設定手段31、強制振動設定手段32、タイムステップ制御手段33、連成計算手段34、カンチレバー形状可視化手段35、振動振幅解析手段36及び反射スポット解析手段37として機能する。ここで、強制振動設定手段32は、片持ち梁構造体の支持点に強制振動を印加した場合の支持点の変位を、タイムステップ毎に前記梁格子座標データ記憶手段に記録する。タイムステップ制御手段33は、各計算対象の格子点の座標の算出を繰り返して行なう。連成計算手段34は、計算対象の梁格子点を特定する。
【0029】
パラメータデータ記憶部22は、カンチレバー評価シミュレーションに用いるパラメータに関するデータを記憶する。本実施形態では、パラメータとして、物性値パラメータと構造パラメータとが用いられる。物性値パラメータは、カンチレバーを構成する材料の物性値(材料の密度ρb及びヤング率E)や液体の流体物性値(液体の密度ρL及び粘性率μ)等である。例えば、本実施形態においては、カンチレバーの材料としてシリコン、液体として生体分子の水溶液を用いることとし、各材料の材料物性値が予め記憶されている。
【0030】
また、構造パラメータは、カンチレバーの形状に基づいて算出されるパラメータである。本実施形態では、構造パラメータとして、カンチレバーCの断面積S(z)及び断面二次
モーメントI(z)が用いられる。
【0031】
流体分布データ記憶部23は、カンチレバー周辺の液体の流体分布に関するデータを記憶する。本実施形態では、タイムステップ毎で、カンチレバーCの座標zにある各流体格子点における流体分布を流れ関数と渦度方程式によって表現する。このため、流体分布データ記憶部23には、タイムステップtで座標x,yで表示される各流体格子点の流れ関数値ψz(x,y;t)及び渦度ωz(x,y;t)が記録される。タイムステップt=0において流体は静止状態にあるため、流れ関数値ψz(x,y;t=0)及び渦度ωz(x,y;t=0)の値は「0」として記憶されている。本実施形態においては、連成計算手段34が、流れ関数値ψz(x,y;t)及び渦度ωz(x,y;t)と、カンチレバーの変位h(z;t)及び速度[(∂/∂t)h(z;t)]に応じ
た境界条件とを用いて、次のタイムステップの流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)を算出すると、流体分布データ記憶部23に記憶する。
【0032】
格子座標データ記憶部24は、カンチレバーCの各格子座標の変形に関するデータを記憶する。本実施形態では、タイムステップ毎で、カンチレバーCの座標zにある格子の変位h(z;t)及び速度[(∂/∂t)h(z;t)]が記録される。タイムステップt=0のときに
は、カンチレバーCの位置は初期高さh0で、変位h(z;t)及び速度[(∂/∂t)h(z;t)]は「0」として記憶されている。本実施形態においては、連成計算手段34が、タイム
ステップtにおける変位h(z;t)及び速度[(∂/∂t)h(z;t)]を算出すると、格子座標
データ記憶部24に記憶する。
【0033】
スポット位置解析結果データ記憶部25は、走査型プローブ顕微鏡の測定信号として出力されるレーザのスポット位置に関するデータを記憶する。このスポット位置は、カンチレバーCの先端部において反射したレーザ光が測定面に照射される位置である。本実施形態では、このスポット位置は、強制振動の周波数及びタイムステップ毎に、設定されたスポット測定面(例えば図13におけるST1,ST2)の座標である。このスポット位置は、反射スポット解析手段37が、スポット位置を算出すると、スポット位置解析結果データ記憶部25に記憶する。このスポット位置は、カンチレバーの先端の格子座標の変位h(z;t)と傾き[(∂/∂z)h(z;t)]から算出される。
【0034】
次に、制御部21が備える各手段(31〜37)について説明する。
パラメータ設定手段31は、シミュレーションに用いるパラメータを設定する処理を行なう。具体的には、パラメータ設定手段31は、入力手段10を介して取得したカンチレバーCの材料やその周辺の液体の物性値をパラメータデータ記憶部22に記録する。
【0035】
また、パラメータ設定手段31には、カンチレバーCの形状毎に、カンチレバーCの断面積S(z)を算出する断面積算出式、及び断面二次モーメントI(z)を算出する断面二次モーメント算出式が記憶されている。パラメータ設定手段31は、カンチレバーの形状に対応する算出式に、高さB及び幅Aを代入して、カンチレバーCの断面積S(z)及び断面二
次モーメントI(z)を算出する。そして、断面積S(z)及び断面二次モーメントI(z)をパ
ラメータデータ記憶部22に記憶する。
【0036】
強制振動設定手段32は、カンチレバーCに印加する強制振動を設定する処理を行なう。強制振動設定手段32は、設定した強制振動をカンチレバーCの支持点(z=0)に供給するように、連成計算手段34に境界条件として供給する。この強制振動設定手段32は、入力手段10を介して強制振動の振幅及び周波数の範囲(上限値及び下限値)を取得して保持する。本実施形態では、強制振動設定手段32は、周波数の範囲内にある所定周波数(例えば1[kHz])間隔の周波数を、順次、連成計算手段34に供給する。
【0037】
タイムステップ制御手段33は、連成計算手段34のタイムステップの制御を行なう。
連成計算手段34は、カンチレバーCの周辺の液体の流体運動と、この流体運動による作用力や他の力などが作用したときのカンチレバーCの各座標における変位(カンチレバーの撓み)とを連立して計算する処理を行なう。そして、連成計算手段34は、流体運動計算手段41、流体抗力計算手段42、タッピングモード計算手段43及び梁変形計算手段44等として機能する。流体運動計算手段41は、特定した梁格子点毎に、先のタイムステップにおける梁格子点の変位を格子座標データ記憶手段から取得し、この変位を境界条件として用いて、計算対象の格子点を含む計算対象面における流体分布を、パラメータデータ記憶手段に記録された流体物性値及び流体分布データ記憶手段に記憶された流体分布を用いて算出する。流体抗力計算手段42は、特定した梁格子点毎に、算出した流体分布と、パラメータデータ記憶手段に記録された流体物性値を用いて流体抗力を算出する。梁変形計算手段44は、特定した梁格子点毎に、流体抗力と、パラメータデータ記憶手段に記録された構造パラメータ及び材料物性値を用いた片持ち梁構造体の運動方程式を計算
して、計算対象の格子点の座標を算出して、梁格子座標データ記憶手段に記憶する。
【0038】
流体運動計算手段41は、カンチレバー周辺の液体の流体運動を算出する計算処理を行なう。この流体運動計算手段41には、タイムステップt+1における流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)を算出するためのナビエ・ストークスの方程式(図3における(1)式及び(2)式)が記録されている。本実施形態では、このナビエ・ストークスの方程式は、差分法によって解を求める。このため、流体運動計算手段41は、このナビエ・ストークスの方程式と、タイムステップtにおける流れ関数値ψz(x,y;t)、渦度ωz(x,y;t)、カンチレバーの変位h(z;t)及び速度[(∂/∂t)h(z;t)]に応じた境界条件と
を用いて、次のタイムステップt+1の流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)を算出する。
【0039】
流体抗力計算手段42は、カンチレバーCに作用する流体抗力を算出する計算処理を実行する手段である。本実施形態では、流体抗力Fliqは、カンチレバーC全体が周辺の液
体から受ける圧力と粘性力との和で算出する。このため、流体抗力計算手段42は、カンチレバー表面での圧力分布PNを算出するための流体圧力算出式と、カンチレバー表面での粘性力分布PTを算出するための流体粘性力算出式と、圧力分布PN及び粘性力分布PTの和をカンチレバーC全体において積分した流体抗力算出式とを記憶している。流体圧力算出式としては図3に示す(3)式、流体粘性力算出式としては図3に示す(4)式、流体抗力算出式としては図3に示す(5)式をそれぞれ用いる。
【0040】
タッピングモード計算手段43は、タッピングモードにおける相互作用力を算出する計算処理を実行する手段である。タッピングモードとは、カンチレバーCの先端の探針が、試料表面に接触したときの影響を考慮するモードである。この場合、カンチレバーCは、探針を介して試料や基板等から、分子間力に基づく相互作用力FInを受ける。このため、タッピングモード計算手段43は、相互作用力FInを算出するための相互作用力算出式を記憶している。この相互作用力FInは、図7に示すように、探針の高さHInの関数になっ
ている。探針の高さHInは、カンチレバーCの先端の高さに依存するため、本実施形態で
は、相互作用力FInは、カンチレバーCの先端の変位h(z)を用いて算出される。タッピ
ングモード計算手段43は、タッピングモードの場合には、カンチレバーCの先端(z=L)の変位h(z)を取得して、相互作用力を算出して、梁変形計算手段44に供給する。
【0041】
梁変形計算手段44は、1次元の梁としてモデル化したカンチレバーCの変形を算出する計算処理を行なう。本実施形態では、タイムステップ毎にカンチレバーCの各格子における変位h(z)と速度[(∂/∂t)h(z;t)]とを算出する。このため、梁変形計算手段4
4は、変位算出式及び速度算出式を記憶している。変位算出式としては、図4に示す(6)式を用いる。また、速度算出式としては、算出した変位h(z)を時間で偏微分(∂/∂t)した式を用いる。本実施形態では、(6)式の変位算出式及び速度算出式は、現タイムステップ及び先のタイムステップにおける変位h(z)を時間発展的に用いた差分法によっ
て算出される。
【0042】
また、梁変形計算手段44は、タッピングモードの場合には、タッピングモード計算手段43が算出した相互作用力を(6)式の右辺に加算して、変位算出式を計算する。
一方、カンチレバー形状可視化手段35は、タイムステップ毎の変位h(z)と速度[(∂/∂t)h(z;t)]とを用いて、シミュレーション画像を生成する手段である。出力する解
析結果がシミュレーション画像の場合には、このカンチレバー形状可視化手段35は、シミュレーション画像をタイムステップ毎に生成して、出力手段15に出力する。
【0043】
振動振幅解析手段36は、変位h(z)と傾き[(∂/∂z)h(z)]とを用いて振動振幅解
析を行なう手段である。本実施形態では、振動振幅解析手段36は、カンチレバーの先端
高さの時間変化解析、カンチレバーの先端高さの振動振幅のスペクトル解析及びカンチレバーの先端傾きの振動振幅スペクトル解析を行なう。振動振幅解析手段36は、それぞれの解析に必要なデータを格子座標データ記憶部24から取得し、各解析結果を配置して表示するグラフを生成するための解析結果データを作成する。
【0044】
カンチレバーの先端高さの時間変化解析においては、振動振幅解析手段36は、時間変化毎のカンチレバーの変位h(z)を取得し、初期高さh0に加算したカンチレバーの先端
高さを算出し、この先端高さの時間依存性を表示するグラフを生成する。
【0045】
カンチレバーの先端高さの振動振幅のスペクトル解析においては、振動振幅解析手段36は、カンチレバーの先端における定常状態での振幅を取得し、振幅の周波数特性を表示するグラフを生成する。
【0046】
カンチレバーの先端傾きの振動振幅スペクトル解析においては、振動振幅解析手段36は、カンチレバーの先端における定常状態での傾きの振れ角を取得し、振れ角の周波数特性を表示するグラフを生成する。
【0047】
振動振幅解析手段36は、入力手段10から入力される解析結果出力指示に応じて、これらの解析結果を出力手段15に出力する。
反射スポット解析手段37は、走査型プローブ顕微鏡の測定信号としてのレーザ光が反射するスポット位置の解析を行なう手段である。反射スポット解析手段37には、レーザ光の出射位置(カンチレバーとの相対位置)に関するデータが記憶されている。更に、反射スポット解析手段37には、カンチレバーの先端の変位h(z=L)及び傾き[(∂/∂z
)h(z=L)]と、レーザ光の位置及び照射方向とを用いて、レーザ光が反射するスポット
位置を算出するスポット位置算出式が記憶されている。反射スポット解析手段37は、カンチレバーの先端の変位h(z=L)を格子座標データ記憶部24から取得し、差分法を用
いて傾き[(∂/∂z)h(z=L)]を算出する。更に、反射スポット解析手段37は、変位h(z=L)及び傾き[(∂/∂z)h(z=L)]とスポット位置算出式とを用いてスポット位置を
算出する。そして、反射スポット解析手段37は、算出したスポット位置を、スポット位置解析結果データ記憶部25に記憶する。
【0048】
次に、上述のように構成されたカンチレバー評価システム20において、カンチレバーCの支持点に強制振動を与えて、液体中でのカンチレバーCの動きを評価するための処理について、図2〜図4及び図8〜図12、図14〜図16を用いて説明する。本実施形態では、制御部21は、タッピングモードが設定された場合の処理について説明する。
【0049】
まず、カンチレバーの評価を行なうために、カンチレバー評価プログラムを起動させる。これにより、カンチレバー評価システム20の制御部21は、シミュレーション条件設定画面をディスプレイに表示する。このシミュレーション条件設定画面には、カンチレバーCの形状や強制振動の振幅と周波数の範囲(上限値及び下限値)とを設定するための項目と、開始ボタンとが含まれている。ここで、各項目が設定されて開始ボタンが選択されると、カンチレバー評価システム20の制御部21は、パラメータの登録処理を実行する(ステップS1−1)。本実施形態では、カンチレバー評価システム20の制御部21は、カンチレバーの形状に関する値及び強制振動の振幅及び周波数を取得する。
【0050】
そして、制御部21のパラメータ設定手段31は、カンチレバーの形状に応じた断面積算出式及び断面二次モーメント算出式にカンチレバーCの形状に関する値を代入して、カンチレバーCの断面積S(z)及び断面二次モーメントI(z)を算出し、パラメータデータ記憶部22に記憶する。そして、連成計算手段34は、強制振動設定手段32に設定された周波数毎に強制振動を変更しながら、シミュレーションの計算を繰り返す。この場合、制
御部21のタイムステップ制御手段33によって設定されたタイムステップ毎に、以下の処理を繰り返す。
【0051】
次に、カンチレバー評価システム20の制御部21は、2次元面内での流体計算処理を実行する(ステップS1−2)。この2次元面内での流体計算処理を、図3を用いて具体的に説明する。この流体計算処理においては、Z軸方向の梁の格子点毎(各計算対象面)に、以下で説明するステップS2−1〜S2−6の処理が繰り返して実行される。
【0052】
この流体計算処理において、まず、制御部21の連成計算手段34は、現タイムステップにおける流れ関数値ψz(x,y;t)、渦度ωz(x,y;t)、カンチレバーCの変位h(z;t)及び
速度[(∂/∂t)h(z;t)]の取得処理を実行して、計算対象面を特定する(ステップS2−1)。具体的には、連成計算手段34の流体運動計算手段41は、流体分布データ記憶部23から、現タイムステップにおける流れ関数値ψz(x,y;t)、渦度ωz(x,y;t)を取得する。流体運動計算手段41は、格子座標データ記憶部24から、カンチレバーCの変位h(z;t)及び速度[(∂/∂t)h(z;t)]を取得する。
【0053】
次に、制御部21の連成計算手段34は、ナビエ・ストークスの方程式を用いて、次のタイムステップでの流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)の算出処理を実行する(ステップS2−2)。具体的には、連成計算手段34の流体運動計算手段41は、まず、流体の密度ρL及び粘性率μをパラメータデータ記憶部22から取得する。次に、流体運動計算手段41は、ステップS2−1で取得した流れ関数値ψz(x,y;t)及び渦度ωz(x,y;t)と、カンチレバーの変位h(z;t)及び速度[(∂/∂t)h(z;t)]に応じた境界条件と
、流体の密度ρL及び粘性率μを、ナビエ・ストークスの方程式に代入する。これにより、次のタイムステップの流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)を算出する。
【0054】
次に、制御部21の連成計算手段34は、次のタイムステップでの流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)を記録する(ステップS2−3)。具体的には、連成計算手段34の流体運動計算手段41は、算出したタイムステップでの流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)を流体分布データ記憶部23に記憶する。
【0055】
次に、制御部21の連成計算手段34は、カンチレバー表面での圧力分布PNの算出処理を実行する(ステップS2−4)。具体的には、連成計算手段34の流体抗力計算手段42は、まず、流体の粘性率μをパラメータデータ記憶部22から取得する。更に、流体抗力計算手段42は、流れ関数値ψz(x,y)を流体分布データ記憶部23から取得する。そして、流体抗力計算手段42は、取得した粘性率μ及び流れ関数値ψz(x,y)を流体圧力算出式に代入して、カンチレバー表面での圧力分布PNを算出する。
【0056】
また、制御部21の連成計算手段34の流体抗力計算手段42は、カンチレバー表面での粘性力分布PTの算出処理を実行する(ステップS2−5)。具体的には、連成計算手段34の流体抗力計算手段42は、まず、流体の粘性率μをパラメータデータ記憶部22から取得する。更に、流体抗力計算手段42は、流体分布データ記憶部23から流れ関数値ψz(x,y)を取得する。そして、流体抗力計算手段42は、取得した粘性率μ及び流れ関数値ψz(x,y)を流体粘性力算出式に代入して、カンチレバー表面での粘性力分布PTを算出する。
【0057】
そして、制御部21の連成計算手段34は、カンチレバーの流体抗力Fliqの算出処理
を実行する(ステップS2−6)。具体的には、連成計算手段34の流体抗力計算手段42は、まず、カンチレバーの長さLをパラメータデータ記憶部22から取得する。流体抗力計算手段42は、カンチレバーの長さLと、算出したカンチレバー表面での圧力分布PN及び粘性力分布PTとを流体抗力算出式に代入して、カンチレバー全体に加わる流体抗
力Fliqを算出し、梁変形計算手段44に供給する。
以上により、2次元面内での流体計算を終了し、図2に示す評価シミュレーションに戻る。
【0058】
次に、タッピングモードが設定されているため、制御部21の連成計算手段34は、先端における試料・基板との相互作用力の算出処理を実行する(ステップS1−3)。具体的には、連成計算手段34のタッピングモード計算手段43は、先のタイムステップにおけるカンチレバーCの先端(z=L)の変位h(z)を、格子座標データ記憶部24から取得する。そして、タッピングモード計算手段43は、取得した変位h(z)を相互作用力算出
式に代入して相互作用力を算出し、梁変形計算手段44に供給する。
【0059】
次に、カンチレバー評価システム20の制御部21は、1次元弾性梁の弾性変形計算処理を実行する(ステップS1−4)。この弾性変形計算処理を、図4を用いて具体的に説明する。この弾性変形計算処理においては、Z軸方向の梁の格子点毎に、以下で説明するステップS3−1〜S3−2の処理が繰り返して実行される。
【0060】
この弾性変形計算処理においては、まず、制御部21の連成計算手段34は、現タイムステップ及び先のタイムステップにおける各格子の変位の取得処理を実行する(ステップS3−1)。具体的には、連成計算手段34の梁変形計算手段44は、格子座標データ記憶部24から、現タイムステップ(t)及び先のタイムステップ(t−1)における座標zにある各格子の変位h(z)を取得する。
【0061】
次に、連成計算手段34の梁変形計算手段44は、次のタイムステップでの1次元梁の変位の計算処理を実行する(ステップS3−2)。具体的には、連成計算手段34の梁変形計算手段44は、まず、カンチレバーCを構成する材料の密度ρb及びヤング率E、カンチレバーCの断面積S(z)及び断面二次モーメントI(z)とをパラメータデータ記憶部22から取得する。梁変形計算手段44は、ステップS3−1において取得した各格子の変位h(z;t)を変位算出式に代入して、次のタイムステップにおける各格子の変位h(z;t+1)を算出する。この場合、タッピングモードであるので、梁変形計算手段44は、相互作用力FInを(6)式の右辺に加算して、変位算出式を計算する。
【0062】
更に、梁変形計算手段44は、ステップS3−1において取得した変位h(z)を速度算
出式に代入して、次のタイムステップにおける各格子の速度[(∂/∂t)h(z)]を算出する。そして、梁変形計算手段44は、算出した各格子の変位h(z)及び速度[(∂/∂t)
h(z)]を格子座標データ記憶部24に記憶する。
【0063】
次に、制御部21の連成計算手段34は、反射したレーザのスポット位置の算出処理を実行する(ステップS1−5)。具体的には、連成計算手段34の反射スポット解析手段37は、カンチレバーの先端の変位h(z=L)を格子座標データ記憶部24から取得する
。反射スポット解析手段37は、取得した変位h(z=L)から傾き[(∂/∂z)h(z=L)]
を算出する。そして、反射スポット解析手段37は、変位h(z=L)及び傾き[(∂/∂z
)h(z=L)]をスポット位置算出式に代入して、スポット位置を算出し、スポット位置解析結果データ記憶部25に記憶する。以上により、1のタイムステップの処理が完了する。
【0064】
そして、カンチレバー評価システム20の制御部21は、タイムステップ毎に、ステップS1−2〜S1−5を繰り返して実行する。具体的には、制御部21のタイムステップ制御手段33が、1のタイムステップにおけるすべての格子点についての計算が終了すると、このタイムステップに「1」を加算した次のタイムステップにおける格子点について処理を実行する。
【0065】
そして、算出したタイムステップが終了タイムステップより大きくなった場合には、次の強制振動の周波数を設定する。具体的には、強制振動設定手段32が、設定している強制振動の周波数に所定周波数を加算した次の強制振動の周波数を算出し、連成計算手段34に供給する。
【0066】
そして、算出した強制振動の周波数が、強制振動の上限値よりも大きくなった場合には、カンチレバー評価システム20の制御部21は、解析結果の出力処理を実行する(ステップS1−6)。具体的には、制御部21のカンチレバー形状可視化手段35、振動振幅解析手段36や反射スポット解析手段37が、解析結果に関するデータを生成して、出力手段15に出力する。
【0067】
(解析結果)
カンチレバー形状可視化手段35は、カンチレバーCの挙動を動画でディスプレイに表示する。図8〜図12には、特定時間におけるカンチレバーCの挙動の静止画の一例が表示されている。ここで、図8〜図11は、図番が大きくなるにつれて、強制振動が供給されてからの経過時間が長くなっている状態を示している。図12は、図8〜図11とは異なる方向から見たカンチレバーCを示している。図9〜図12には、各座標点におけるX方向の変位及び傾きが考慮されて、各時間における変形したカンチレバーCが表示されている。また、図9〜図12には、カンチレバーCの周辺の流体の動きのベクトルも表示されている。
【0068】
また、振動振幅解析手段36は、図14に示すように、強制振動の周波数に応じたカンチレバーCの先端の高さの時間変化をディスプレイに表示する。図14においては、カンチレバーCの支持点に供給された強制振動の周波数が、5[kHz]、10[kHz]及び15[kHz]の場合を示している。
【0069】
振動振幅解析手段36は、図15に示すように、液体中のカンチレバーCの先端の高さの振動振幅のスペクトルをディスプレイに表示する。この図15には、真空中及び大気中にあるカンチレバーCの先端の高さの振動振幅のスペクトルも合わせて表示されている。
【0070】
振動振幅解析手段36は、図16に示すように、液体中のカンチレバーCの先端の傾きの振動振幅のスペクトルをディスプレイに表示する。この図16には、真空中及び大気中にあるカンチレバーCの先端の高さの振動振幅のスペクトルも合わせて表示されている。
【0071】
本実施形態によれば、以下のような効果を得ることができる。
・ 本実施形態では、カンチレバー評価システム20の制御部21は、2次元面内での流体計算処理を実行する(ステップS1−2)。この場合、制御部21は、取得した流れ関数値ψz(x,y;t)及び渦度ωz(x,y;t)と、カンチレバーの変位h(z;t)及び速度[(∂/∂
t)h(z;t)]に応じた境界条件とを用いて、次のタイムステップの流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)を算出する(ステップS2−3)。制御部21は、算出した流れ関数値ψz(x,y)及び渦度ωz(x,y)を用いてカンチレバーの流体抗力を算出する。制御部21は、1次元弾性梁の弾性変形計算処理を実行する(ステップS1−4)。この場合、算出した流体抗力を変位算出式に代入して、次のタイムステップでの1次元梁の変位h(z;t+1)の計算処理を実行する(ステップS3−2)。そして、これらステップS1−2及び
ステップS1−4をそれぞれ格子点毎(計算対象面毎)に繰り返し、更に、それをタイムステップ毎に繰り返す。
【0072】
すなわち、カンチレバーCの変位h(z;t)を境界条件として用いた流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)を計算し、これら流れ関数値ψz(x,y;t+1)及び渦度ωz(x,y;t+1)から算出した流体抗力Fliqを用いてカンチレバーCの変位h(z;t+1)を算出することを
交互に繰り返す。従って、カンチレバーCから液体への影響を考慮した式と、液体からカンチレバーへの影響を考慮した式とを連立させて計算を行なうので、カンチレバーCとその周辺の流体の挙動も含めた総合的な数値シミュレーションを行なうことができる。この場合、カンチレバーCをモデル化した1次元に直交する2次元面で液体をモデル化しているので、全体として3次元の挙動をシミュレーションすることができる。従って、このシミュレーションによってカンチレバーの挙動の評価を行なうことができ、精度の高い測定が可能なカンチレバーの設計やカンチレバーの変形を考慮した測定信号の解析に役立てることができる。また、カンチレバーCを1次元にモデル化し、流体を2次元でモデル化しているので、それぞれの計算は、3次元モデルの計算よりもはるかに簡単であり、計算負荷を軽減することができる。
【0073】
・ 本実施形態では、制御部21の梁変形計算手段44は、(6)式の変位算出式を用いてカンチレバーCの変形を算出する。この(6)式には、カンチレバーの構造パラメータ(断面積S(z)及び断面二次モーメントI(z))が含まれる。これら断面積S(z)及び断
面二次モーメントI(z)は、カンチレバーCがモデル化した1次元とは異なる方向の形状
に関するパラメータ(幅及び高さ)から算出される値である。このため、モデル化した1次元とは異なる他の2次元の要素もカンチレバーCの計算に影響を与えることになるため、全体として3次元の挙動をより正確にシミュレーションすることができる。
【0074】
・ 本実施形態では、カンチレバー評価システム20の制御部21は、先端における試料・基板との相互作用力FInの算出処理を実行する(ステップS1−3)。制御部21は、1次元弾性梁の弾性変形計算処理(ステップS1−4)において、算出した相互作用力FInを(6)式の右辺に加算して、変位算出式を計算する。このため、カンチレバーCとその周辺の液体との挙動だけでなく、探針が試料や基板から受ける相互作用力も含めた総合的な数値シミュレーションを行なうことができる。
【0075】
・ 本実施形態では、カンチレバー評価システム20の制御部21は、反射したレーザ光のスポット位置の算出処理を実行する(ステップS1−5)。この場合、制御部21は、カンチレバーの先端の変位h(z=L)及び傾き[(∂/∂z)h(z=L)]をスポット位置算
出式に代入して、スポット位置を算出する。例えば、図13(a)に示すカンチレバーC1及び図13(b)に示すカンチレバーC2のように、変位h(z=L)が同じであっても
傾き[(∂/∂z)h(z=L)]が異なる場合がある。この場合には、反射されるレーザ光LL1,LL2のスポット位置が異なる。反射したレーザ光が、走査型プローブ顕微鏡の計測信号となるので、傾き[(∂/∂z)h(z=L)]を用いてスポット位置を算出することにより、このレーザ光のスポット位置をより的確に把握して、計測信号をより正確に取得することができる。
【0076】
・ 本実施形態では、カンチレバー評価システム20の制御部21は、カンチレバーに印加する強制振動を設定する処理を行なう。この場合、制御部21の強制振動設定手段32は、指定された強制振動の振幅と周波数の範囲において、所定周波数間隔毎の周波数を、順次、連成計算手段34に供給する。1つの周波数について終了タイムステップまで算出すると、強制振動設定手段32は、その周波数に所定周波数を加算した次の強制振動の周波数を算出し、連成計算手段34に供給する。このため、異なる強制振動を与えたときのカンチレバーの先端高さの時間依存性や、振動振幅スペクトル等に基づいてカンチレバーを評価することができる。
【0077】
・ 本実施形態では、解析結果として、制御部21のカンチレバー形状可視化手段35は、カンチレバーCの挙動を動画でディスプレイに表示する。このため、カンチレバーC及び流体の挙動を動画で把握することができる。
【0078】
・ 本実施形態では、解析結果として、制御部21の振動振幅解析手段36は、図14に示すように、強制振動の周波数に応じたカンチレバーCの先端の高さの時間変化をディスプレイに表示する。この図14から、カンチレバーCの支持点に供給される強制振動の周波数によって、先端の振動振幅が変化していることがわかる。
【0079】
・ 本実施形態では、解析結果として、制御部21の振動振幅解析手段36は、図15に示すように、液体中のカンチレバーCの先端の高さの振動振幅のスペクトルをディスプレイに表示する。この図15から、液体中のカンチレバーCの共鳴ピークは、真空中や大気中のカンチレバーCに比べて、鈍いことがわかる。
【0080】
・ 本実施形態では、解析結果として、制御部21の振動振幅解析手段36は、図16に示すように、液体中のカンチレバーCの先端の傾きの振動振幅のスペクトルをディスプレイに表示する。この図16から、液体中のカンチレバーCの先端の傾きは、高周波数で増長されていることがわかる。
【0081】
また、上記実施形態は、以下のように変更してもよい。
○ 上記実施形態において、タッピングモードの場合の評価シミュレーションについて説明したが、タッピングモードを含めないでシミュレーションを行なってもよい。この場合には、上述したステップS1−3の処理を省略する。更に、シミュレーション条件設定画面に、タッピングモードの利用希望の有無を選択できるように構成してもよい。
【0082】
○ 上記実施形態において、制御部21は、タイムステップ毎に反射したレーザのスポット位置の算出処理を実行した(ステップS1−5)。スポット位置の算出するタイミングはこれに限られるものではなく、制御部21は、解析結果の出力処理(ステップS1−6)において、反射したレーザの各スポット位置の算出処理をまとめて実行してもよい。
【0083】
○ 上記実施形態において、カンチレバー評価システム20の制御部21は、カンチレバーに印加する強制振動を設定した。この場合、制御部21は、指定された強制振動の周波数の範囲において、所定周波数間隔毎の強制振動の周波数を、順次、連成計算手段34に供給した。連成計算手段34に供給する周波数間隔はこれに限らず、自動的に変更してもよい。例えば、共鳴振動数付近の周波数においては、シミュレーションする周波数の間隔を狭くして計算を実行してもよい。共鳴振動数付近では、カンチレバーCの支持点と先端との振動振幅の位相差が「π/2」である。そこで、カンチレバーCの支持点の変位と先端の変位との位相差から共鳴振動数を推定し、共鳴振動数の近傍については、より狭い周波数間隔の周波数を設定してシミュレーションを実行する。具体的には、制御部21の強制振動設定手段32に、狭い周波数間隔でシミュレーションを行なう位相差範囲に関するデータを記憶させておく。そして、強制振動設定手段32は、カンチレバーCにおける支持点の高さの振動波形と先端の高さの振動波形から、これら振動の位相差を算出し、この位相差と位相差範囲とを比較して、位相差範囲内である周波数を特定する。そして、この周波数の近傍の所定範囲において、強制振動設定手段32は、狭い間隔(例えば、0.2[kHz])の周波数を設定して連成計算手段34に供給する。ここでは、特定した周波数の低周波側の設定周波数と高周波側の設定周波数との間を近傍の所定範囲とする。この場合、共鳴振動数付近の周波数については、自動的に振動振幅を詳細に解析することができる。
【0084】
○ 上記実施形態において、カンチレバー評価プログラムを起動させた場合に出力されるシミュレーション条件設定画面において、カンチレバーCの形状や強制振動の振幅及び周波数の範囲を設定した。ここで、カンチレバーの材料や流体の材料物性値を設定できるようにしてもよい。また、カンチレバー評価システム20に、物質名と材料物性値とを関連付けた物性定数テーブルを保持させておき、指定された物質名に応じてシミュレーショ
ンに用いる材料物性値を決定するようにしてもよい。
【図面の簡単な説明】
【0085】
【図1】本発明のカンチレバー評価システムの概略構成図。
【図2】評価シミュレーションの処理手順を説明するための流れ図。
【図3】2次元面内での流体計算の処理手順を説明するための流れ図。
【図4】1次元弾性梁の弾性変形計算の処理手順を説明するための流れ図。
【図5】カンチレバーの一次元弾性梁モデルを説明するための説明図。
【図6】カンチレバー周辺の液体の二次元流体モデルを説明するための説明図。
【図7】カンチレバーの探針の高さと相互作用力の関係を説明するための説明図。
【図8】水溶液中カンチレバー振動解析シミュレーション画像を説明する説明図。
【図9】水溶液中カンチレバー振動解析シミュレーション画像を説明する説明図。
【図10】水溶液中カンチレバー振動解析シミュレーション画像を説明する説明図。
【図11】水溶液中カンチレバー振動解析シミュレーション画像を説明する説明図。
【図12】水溶液中カンチレバー振動解析シミュレーション画像を説明する説明図。
【図13】レバーの変形と反射スポットの対応関係を説明する説明図であって、(a)は低周波数の場合、(b)は共鳴振動数以上の高周波数の場合を示す。
【図14】強制振動の周波数に応じたカンチレバーの先端の高さの時間変化を説明する説明図。
【図15】カンチレバーの先端の高さの振動振幅のスペクトルを説明する説明図。
【図16】カンチレバーの先端の傾きの振動振幅のスペクトルを説明する説明図。
【符号の説明】
【0086】
C…カンチレバー、Fliq…流体抗力、h(z)…変位、x,y,z…座標、10…入力手段、15…出力手段、20…カンチレバー評価システム、21…制御部、22…パラメータデータ記憶部、23…流体分布データ記憶部、24…格子座標データ記憶部、25…スポット位置解析結果データ記憶部、31…パラメータ設定手段、32…強制振動設定手段、33…タイムステップ制御手段、34…連成計算手段、35…カンチレバー形状可視化手段、36…振動振幅解析手段、37…反射スポット解析手段、41…流体運動計算手段、42…流体抗力計算手段、43…タッピングモード計算手段、44…梁変形計算手段。
【特許請求の範囲】
【請求項1】
カンチレバーの形状に基づく構造パラメータと、前記カンチレバーを構成する材料の材料物性値と、前記カンチレバーの周辺の流体の流体物性値とを含むパラメータを記憶したパラメータデータ記憶手段と、
前記カンチレバーを1次元の片持ち梁構造体としてモデル化したときの前記梁構造体の長手方向の各梁格子点の変位に関するデータを記憶する梁格子座標データ記憶手段と、
各梁格子点をそれぞれ含み前記長手方向に対して直交する面における前記流体の流体分布に関するデータを記憶する流体分布データ記憶手段と、
前記カンチレバーの振動特性を算出する制御手段とを備えたカンチレバー評価システムであって、
前記制御手段が、
前記片持ち梁構造体の支持点に強制振動を印加した場合の支持点の変位を、タイムステップ毎に前記梁格子座標データ記憶手段に記録する手段と、
計算対象の梁格子点を特定する手段と、
前記特定した梁格子点毎に、
先のタイムステップにおける前記梁格子点の変位を前記梁格子座標データ記憶手段から取得し、この変位を境界条件として用いて、計算対象の格子点を含む計算対象面における流体分布を、前記パラメータデータ記憶手段に記録された流体物性値及び前記流体分布データ記憶手段に記憶された流体分布を用いて算出する手段と、
算出した流体分布と、前記パラメータデータ記憶手段に記録された前記流体物性値を用いて流体抗力を算出する手段と、
前記流体抗力と、前記パラメータデータ記憶手段に記録された構造パラメータ及び材料物性値を用いた片持ち梁構造体の運動方程式を計算して、前記計算対象の格子点の座標を算出して、前記梁格子座標データ記憶手段に記憶する手段と、
各計算対象の格子点の座標の算出を繰り返して行なうタイムステップ制御手段と
を備えたことを特徴とするカンチレバー評価システム。
【請求項2】
前記制御手段は、
前記強制振動の周波数を、所定の範囲で順次変更する強制振動設定手段と、
強制振動の周波数毎に前記片持ち梁構造体の先端の振幅を算出し、この振動の周波数特性を出力する手段とを更に備えたことを特徴とする請求項1に記載のカンチレバー評価システム。
【請求項3】
前記制御手段は、
前記片持ち梁構造体の先端の格子点において、前記カンチレバーの先端に設けられた探針が測定試料及びこの試料の基板から受ける作用力を算出する手段を更に備え、
前記制御手段は、この作用力を含む片持ち梁構造体の運動方程式を計算することを特徴とする請求項1又は2に記載のカンチレバー評価システム。
【請求項4】
前記カンチレバーの先端の格子点の座標と、この格子点に隣接する格子点の座標から先端部の傾斜角度を算出する手段と、
前記格子点の座標及び傾斜角度を用いて、前記先端の格子点に照射したレーザの反射光路を特定して反射スポットの位置を算出する手段とを更に備えたことを特徴とする請求項1〜3のいずれか1項に記載のカンチレバー評価システム。
【請求項5】
カンチレバーの形状に基づく構造パラメータと、前記カンチレバーを構成する材料の材料物性値と、前記カンチレバーの周辺の流体の流体物性値とを含むパラメータを記憶したパラメータデータ記憶手段と、
前記カンチレバーを1次元の片持ち梁構造体としてモデル化したときの前記梁構造体の
長手方向の各梁格子点の変位に関するデータを記憶する梁格子座標データ記憶手段と、
各梁格子点をそれぞれ含み前記長手方向に対して直交する面における前記流体の流体分布に関するデータを記憶する流体分布データ記憶手段と、
制御手段とを備え、前記カンチレバーの振動特性を算出するためのカンチレバー評価方法であって、
前記制御手段が、
前記片持ち梁構造体の支持点に強制振動を印加した場合の支持点の変位を、タイムステップ毎に前記梁格子座標データ記憶手段に記録する段階と、
計算対象の梁格子点を特定する段階と、
前記特定した梁格子点毎に、
先のタイムステップにおける前記梁格子点の変位を前記梁格子座標データ記憶手段から取得し、この変位を境界条件として用いて、計算対象の格子点を含む計算対象面における流体分布を、前記パラメータデータ記憶手段に記録された流体物性値及び前記流体分布データ記憶手段に記憶された流体分布を用いて算出する段階と、
算出した流体分布と、前記パラメータデータ記憶手段に記録された前記流体物性値を用いて流体抗力を算出する段階と、
前記流体抗力と、前記パラメータデータ記憶手段に記録された構造パラメータ及び材料物性値を用いた片持ち梁構造体の運動方程式を計算して、前記計算対象の格子点の座標を算出して、前記梁格子座標データ記憶手段に記憶する段階と、
各計算対象の格子点の座標の算出を繰り返して行なうタイムステップ制御段階と
を実行することを特徴とするカンチレバー評価方法。
【請求項6】
カンチレバーの形状に基づく構造パラメータと、前記カンチレバーを構成する材料の材料物性値と、前記カンチレバーの周辺の流体の流体物性値とを含むパラメータを記憶したパラメータデータ記憶手段と、
前記カンチレバーを1次元の片持ち梁構造体としてモデル化したときの前記梁構造体の長手方向の各梁格子点の変位に関するデータを記憶する梁格子座標データ記憶手段と、
各梁格子点をそれぞれ含み前記長手方向に対して直交する面における前記流体の流体分布に関するデータを記憶する流体分布データ記憶手段と、
制御手段とを備え、前記カンチレバーの振動特性を算出するためのカンチレバー評価プログラムであって、
前記制御手段を、
前記片持ち梁構造体の支持点に強制振動を印加した場合の支持点の変位を、タイムステップ毎に前記梁格子座標データ記憶手段に記録する手段、
計算対象の梁格子点を特定する手段、
前記特定した梁格子点毎に、
先のタイムステップにおける前記梁格子点の変位を前記梁格子座標データ記憶手段から取得し、この変位を境界条件として用いて、計算対象の格子点を含む計算対象面における流体分布を、前記パラメータデータ記憶手段に記録された流体物性値及び前記流体分布データ記憶手段に記憶された流体分布を用いて算出する手段、
算出した流体分布と、前記パラメータデータ記憶手段に記録された前記流体物性値を用いて流体抗力を算出する手段、
前記流体抗力と、前記パラメータデータ記憶手段に記録された構造パラメータ及び材料物性値を用いた片持ち梁構造体の運動方程式を計算して、前記計算対象の格子点の座標を算出して、前記梁格子座標データ記憶手段に記憶する手段、及び
各計算対象の格子点の座標の算出を繰り返して行なうタイムステップ制御手段
として機能することを特徴とするカンチレバー評価プログラム。
【請求項1】
カンチレバーの形状に基づく構造パラメータと、前記カンチレバーを構成する材料の材料物性値と、前記カンチレバーの周辺の流体の流体物性値とを含むパラメータを記憶したパラメータデータ記憶手段と、
前記カンチレバーを1次元の片持ち梁構造体としてモデル化したときの前記梁構造体の長手方向の各梁格子点の変位に関するデータを記憶する梁格子座標データ記憶手段と、
各梁格子点をそれぞれ含み前記長手方向に対して直交する面における前記流体の流体分布に関するデータを記憶する流体分布データ記憶手段と、
前記カンチレバーの振動特性を算出する制御手段とを備えたカンチレバー評価システムであって、
前記制御手段が、
前記片持ち梁構造体の支持点に強制振動を印加した場合の支持点の変位を、タイムステップ毎に前記梁格子座標データ記憶手段に記録する手段と、
計算対象の梁格子点を特定する手段と、
前記特定した梁格子点毎に、
先のタイムステップにおける前記梁格子点の変位を前記梁格子座標データ記憶手段から取得し、この変位を境界条件として用いて、計算対象の格子点を含む計算対象面における流体分布を、前記パラメータデータ記憶手段に記録された流体物性値及び前記流体分布データ記憶手段に記憶された流体分布を用いて算出する手段と、
算出した流体分布と、前記パラメータデータ記憶手段に記録された前記流体物性値を用いて流体抗力を算出する手段と、
前記流体抗力と、前記パラメータデータ記憶手段に記録された構造パラメータ及び材料物性値を用いた片持ち梁構造体の運動方程式を計算して、前記計算対象の格子点の座標を算出して、前記梁格子座標データ記憶手段に記憶する手段と、
各計算対象の格子点の座標の算出を繰り返して行なうタイムステップ制御手段と
を備えたことを特徴とするカンチレバー評価システム。
【請求項2】
前記制御手段は、
前記強制振動の周波数を、所定の範囲で順次変更する強制振動設定手段と、
強制振動の周波数毎に前記片持ち梁構造体の先端の振幅を算出し、この振動の周波数特性を出力する手段とを更に備えたことを特徴とする請求項1に記載のカンチレバー評価システム。
【請求項3】
前記制御手段は、
前記片持ち梁構造体の先端の格子点において、前記カンチレバーの先端に設けられた探針が測定試料及びこの試料の基板から受ける作用力を算出する手段を更に備え、
前記制御手段は、この作用力を含む片持ち梁構造体の運動方程式を計算することを特徴とする請求項1又は2に記載のカンチレバー評価システム。
【請求項4】
前記カンチレバーの先端の格子点の座標と、この格子点に隣接する格子点の座標から先端部の傾斜角度を算出する手段と、
前記格子点の座標及び傾斜角度を用いて、前記先端の格子点に照射したレーザの反射光路を特定して反射スポットの位置を算出する手段とを更に備えたことを特徴とする請求項1〜3のいずれか1項に記載のカンチレバー評価システム。
【請求項5】
カンチレバーの形状に基づく構造パラメータと、前記カンチレバーを構成する材料の材料物性値と、前記カンチレバーの周辺の流体の流体物性値とを含むパラメータを記憶したパラメータデータ記憶手段と、
前記カンチレバーを1次元の片持ち梁構造体としてモデル化したときの前記梁構造体の
長手方向の各梁格子点の変位に関するデータを記憶する梁格子座標データ記憶手段と、
各梁格子点をそれぞれ含み前記長手方向に対して直交する面における前記流体の流体分布に関するデータを記憶する流体分布データ記憶手段と、
制御手段とを備え、前記カンチレバーの振動特性を算出するためのカンチレバー評価方法であって、
前記制御手段が、
前記片持ち梁構造体の支持点に強制振動を印加した場合の支持点の変位を、タイムステップ毎に前記梁格子座標データ記憶手段に記録する段階と、
計算対象の梁格子点を特定する段階と、
前記特定した梁格子点毎に、
先のタイムステップにおける前記梁格子点の変位を前記梁格子座標データ記憶手段から取得し、この変位を境界条件として用いて、計算対象の格子点を含む計算対象面における流体分布を、前記パラメータデータ記憶手段に記録された流体物性値及び前記流体分布データ記憶手段に記憶された流体分布を用いて算出する段階と、
算出した流体分布と、前記パラメータデータ記憶手段に記録された前記流体物性値を用いて流体抗力を算出する段階と、
前記流体抗力と、前記パラメータデータ記憶手段に記録された構造パラメータ及び材料物性値を用いた片持ち梁構造体の運動方程式を計算して、前記計算対象の格子点の座標を算出して、前記梁格子座標データ記憶手段に記憶する段階と、
各計算対象の格子点の座標の算出を繰り返して行なうタイムステップ制御段階と
を実行することを特徴とするカンチレバー評価方法。
【請求項6】
カンチレバーの形状に基づく構造パラメータと、前記カンチレバーを構成する材料の材料物性値と、前記カンチレバーの周辺の流体の流体物性値とを含むパラメータを記憶したパラメータデータ記憶手段と、
前記カンチレバーを1次元の片持ち梁構造体としてモデル化したときの前記梁構造体の長手方向の各梁格子点の変位に関するデータを記憶する梁格子座標データ記憶手段と、
各梁格子点をそれぞれ含み前記長手方向に対して直交する面における前記流体の流体分布に関するデータを記憶する流体分布データ記憶手段と、
制御手段とを備え、前記カンチレバーの振動特性を算出するためのカンチレバー評価プログラムであって、
前記制御手段を、
前記片持ち梁構造体の支持点に強制振動を印加した場合の支持点の変位を、タイムステップ毎に前記梁格子座標データ記憶手段に記録する手段、
計算対象の梁格子点を特定する手段、
前記特定した梁格子点毎に、
先のタイムステップにおける前記梁格子点の変位を前記梁格子座標データ記憶手段から取得し、この変位を境界条件として用いて、計算対象の格子点を含む計算対象面における流体分布を、前記パラメータデータ記憶手段に記録された流体物性値及び前記流体分布データ記憶手段に記憶された流体分布を用いて算出する手段、
算出した流体分布と、前記パラメータデータ記憶手段に記録された前記流体物性値を用いて流体抗力を算出する手段、
前記流体抗力と、前記パラメータデータ記憶手段に記録された構造パラメータ及び材料物性値を用いた片持ち梁構造体の運動方程式を計算して、前記計算対象の格子点の座標を算出して、前記梁格子座標データ記憶手段に記憶する手段、及び
各計算対象の格子点の座標の算出を繰り返して行なうタイムステップ制御手段
として機能することを特徴とするカンチレバー評価プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図13】
【図14】
【図15】
【図16】

【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図13】
【図14】
【図15】
【図16】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2009−109235(P2009−109235A)
【公開日】平成21年5月21日(2009.5.21)
【国際特許分類】
【出願番号】特願2007−279315(P2007−279315)
【出願日】平成19年10月26日(2007.10.26)
【出願人】(592131906)みずほ情報総研株式会社 (187)
【出願人】(899000068)学校法人早稲田大学 (602)
【公開日】平成21年5月21日(2009.5.21)
【国際特許分類】
【出願日】平成19年10月26日(2007.10.26)
【出願人】(592131906)みずほ情報総研株式会社 (187)
【出願人】(899000068)学校法人早稲田大学 (602)
[ Back to top ]