
カート
【課題】無人ヘリコプタ1を安定した姿勢で地上運搬することができるカート20を提供する。
【解決手段】機体下部の左右にランナー9が備えられた無人ヘリコプタ1を運搬するカート20であって、左右一対の車輪22が備えられている支持車体21と、この支持車体21から延設されたハンドルフレーム23と、このハンドルフレームの先端に設けられた把持部24と、支持車体21に設けられて左右のランナー9を支持するためのランナー受け部25とを有し、無人ヘリコプタ1の機体後部の後部橇12を支持固定するためのロック手段26がハンドルフレーム23の後部に備えられている。
【解決手段】機体下部の左右にランナー9が備えられた無人ヘリコプタ1を運搬するカート20であって、左右一対の車輪22が備えられている支持車体21と、この支持車体21から延設されたハンドルフレーム23と、このハンドルフレームの先端に設けられた把持部24と、支持車体21に設けられて左右のランナー9を支持するためのランナー受け部25とを有し、無人ヘリコプタ1の機体後部の後部橇12を支持固定するためのロック手段26がハンドルフレーム23の後部に備えられている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、無人ヘリコプタなど無人飛行体を運搬するためのカートの構造に関する。
【背景技術】
【0002】
無人ヘリコプタは、農薬等の薬剤を散布するため(例えば特許文献1)、あるいは航空写真撮影等のために用いられている。この無人ヘリコプタは、無線操縦機で使用者が地上から機体を見ながら飛行状態に応じて遠隔操作できるものである。
【0003】
ところで、降着装置として車輪の代わりにソリ状のランナー(スキッドともいう)を備えた無人ヘリコプタを、地上に降着させた後、運搬車などに載せるための運搬装置として種々のものが提案されている。
【0004】
例えば、特許文献1の従来技術として、左右一対の車輪を備えた台車と、その左右両側上面に設けられたランナー受け台と、台車の左右中央部から延設されたけん引棒とにより地上けん引装置が構成されたことが開示されている。この装置では、ランナー受け台にヘリコプタにおけるランナーを載置して固定し、けん引棒の先端を牽引車に連結して、ヘリコプタの機体を前方または後方に押して移動させるものであった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平11−20795号公報(図5〜図8参照)
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1の構成では、ヘリコプタの機体の尾部の後ソリの個所を支持するものがないため、機体前後方向の縦揺れいわゆるピッチング及び横揺れに対して不安定であった。また、後ソリの個所の支持部が存在しないため、この部分を支持したり方向を安定させるべく余分の人員が必要となるという問題もあった。
【0007】
本発明は上記従来技術の欠点に鑑みなされたものであって、無人ヘリコプタなどの無人飛行体を地上で安定して運搬(移動)させることができ、且つ少人数で移動させることが可能な運搬装置(カート)を提供することを目的とする。
【課題を解決するための手段】
【0008】
請求項1の発明のカートは、機体下部の左右にランナーが備えられた無人飛行体を運搬するカートであって、少なくとも左右一対の車輪が備えられている支持車体と、該支持車体から延設されたハンドルフレームと、このハンドルフレームの先端に設けられた把持部と、前記支持車体に設けられて前記左右のランナーを支持するためのランナー受け部とを有し、前記無人飛行体の機体後部の後部橇を支持固定するためのロック手段が前記ハンドルフレームに備えられていることを特徴とする。
【0009】
請求項2に記載の発明は、請求項1に記載のカートにおいて、前記両ランナー受け部は、ランナーの延びる方向と直交する方向の断面が上向き円弧状に形成されていることを特徴とする。
【0010】
請求項3に記載の発明は、請求項1または2に記載のカートにおいて、前記両ランナー受け部は、前記左右一対の車輪より左右両側外側に設けられていることを特徴とする。
【0011】
請求項4に記載の発明は、請求項3に記載のカートにおいて、前記両ランナー受け部は、前記左右一対の車輪の車軸より下側に設けられていることを特徴とする。
【0012】
請求項5に記載の発明は、請求項1乃至4のいずれかに記載のカートにおいて、前記ロック手段は、前記把持部の近傍に配置されていることを特徴とする。
【発明の効果】
【0013】
請求項1の発明によれば、支持車体に設けられた左右一対のランナー受け部に無人飛行体における左右のランナーが支持され、支持車体から延びるハンドルフレームのロック手段には無人飛行体における後部橇が支持固定されるので、無人飛行体を3点にて安定して支持できる。しかも、固定個所はロック手段の1個所だけであるので、固定作業も少なくて済み、無人飛行体の運搬作業が簡便に行なえるという効果を奏する。
【0014】
請求項2の発明によれば、前記両ランナー受け部は、ランナーの延びる方向と直交する方向の断面が上向き円弧状に形成されているので、両ランナー受け部に支持されたランナーがその延びる方向と直交する左右両側方向にずれ動くこと、ひいては無人飛行体がカート上で左右にずれ動いたり左右に対して傾くことが効果的に防止でき、安定して運搬できるという効果を奏する。
【0015】
請求項3の発明によれば、前記両ランナー受け部は、前記左右一対の車輪より左右両側外側に設けられているので、カート全体の左右方向の寸法をコンパクトにすることができる。
【0016】
請求項4の発明によれば、請求項3の発明に加えて、前記両ランナー受け部は、前記左右一対の車輪の車軸より下側に設けられているから、両ランナー受け部にランナーを載せるために無人飛行体の機体を持ち上げる高さを少なくできるので、この載せ作業が簡単になるという効果を奏する。
【0017】
請求項5の発明によれば、前記ロック手段は、前記把持部の近傍に配置されているから、作業者の操作範囲をコンパクトにまとめて、複数の操作を簡便に行なえるという効果を奏する。
【図面の簡単な説明】
【0018】
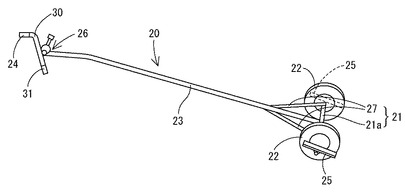
【図1】本発明に係るカートの斜視図である。
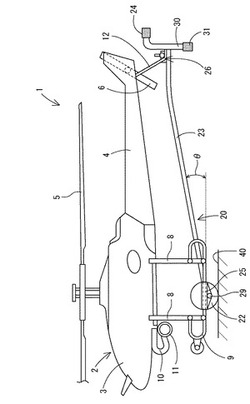
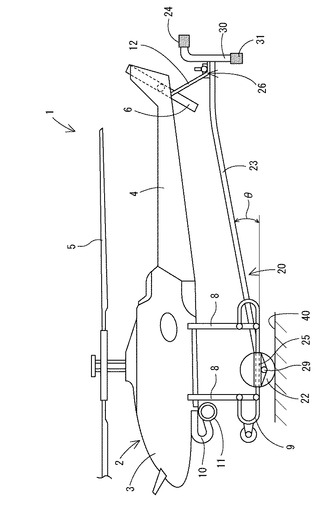
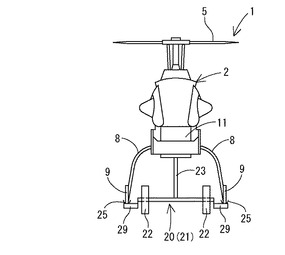
【図2】無人ヘリコプタを載置した状態のカートの側面図である。
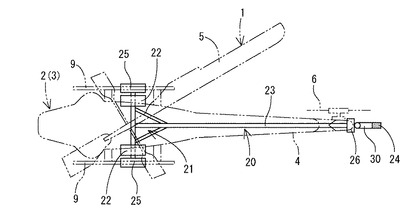
【図3】図2の上面図である。
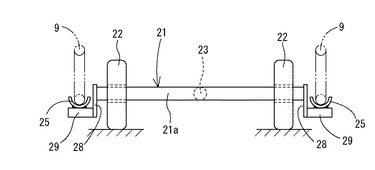
【図4】図2の正面図である。
【図5】ランナー受け部の位置及び断面を示す図である。
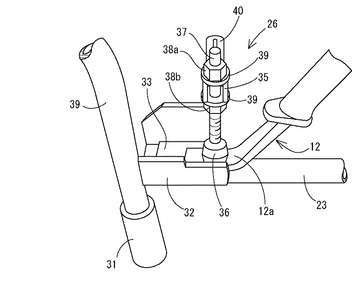
【図6】後部橇を支持固定するためのロック手段の斜視図である。
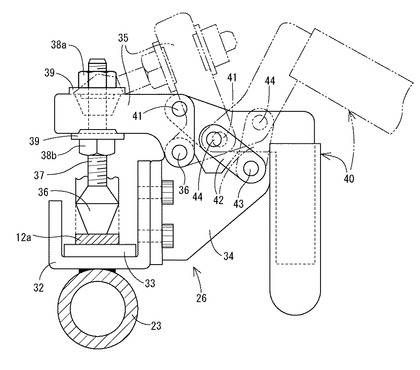
【図7】ロック手段の拡大正面図である。
【発明を実施するための形態】
【0019】
図2及び図4に示すように、無人ヘリコプタ1は、メインボディ3とテールボディ4からなる機体2を備える。メインボディ3の上部にメインロータ5が設けられ、テールボディ4の後部にテールロータ6が設けられている。機体2のほぼ中央部のメインボディ3の左右下部に前後対の支持脚8を介してランナー9が設けられている。テールボディ4の後部には下後向きに延びる後部橇12が設けられている。
【0020】
ランナー9は、機体4の前後方向に延びる下片とそれに平行な上片の前後部位を半円部で連結したパイプ製である。ランナー9及び支持脚8はアルミ材または非導電体であるグラスファイバーのFRPで形成されていて良い。
【0021】
ランナー9の前端部上方の機体下部には、機体内のエンジン(不図示)に接続された排気管10に備わるマフラー11が配設される。
【0022】
メインボディ3の後部上側に後部橇12と不図示の自律制御ボックスとが設けられ、自律制御に必要な、GPS制御装置、地上と通信するデータ通信機や画像送信機、及び制御プログラムを組込んだ制御基板などが収容される。自律制御は、機体の位置や速度などの飛行データ、機体の姿勢や方位などの機体データ、エンジン回転数やスロットル開度などの運転状態データ等に基づいて、予め定められた運転モードや制御プログラムを自動的にあるいは地上局からの指令によって選択し、運転状態に応じて最適な操縦制御を行う。
【0023】
この無人ヘリコプタ1は、このような自律制御で飛行できるとともに、飛行状態を目で確認しながら、この飛行状態や機体から送信された各種運転状態データに基づいて、無線操縦機によりマニュアル操作が可能である。
【0024】
図1〜図7は上記無人ヘリコプタ1を地上で運搬するための本発明に係るカート20を示す。
【0025】
カート20は、少なくとも左右一対の車輪22が備えられている支持車体21と、この支持車体21から延設されたハンドルフレーム23と、このハンドルフレーム23の先端に設けられた把持部24と、支持車体21に設けられて左右のランナー9を支持するためのランナー受け部25とを有する。そして、無人ヘリコプタ1の機体後部の後部橇12を支持固定するためのロック手段26がハンドルフレーム23に備えられているものである。
【0026】
支持車体21は、基本的には1本の車軸21aであり、この車軸21aの左右両側にタイヤ製の車輪22が回転自在に枢支されている。車軸21aの左右中央からカートの進行と平行状に延びる1本のパイプ状のハンドルフレーム23と車軸21aとを一対の補強フレーム27にて連結している。
【0027】
ランナー受け部25は左右一対の車輪22より外側に配置されるものである。従って、カート20全体の左右幅寸法をコンパクトにできる。
【0028】
図5に示すように、車軸21aの端部に下向きのブラケット28が溶接などにて固着され、ブラケット28の下部から外向きに突出させた支持ボス29の上にランナー受け部25が溶接などにて固着されている。各ランナー受け部25は車軸21aと直交する方向(ランナー9の延びる方向と直交する方向)の断面が上向き円弧状に形成されている。そして、両ランナー受け部25は、左右一対の車軸21aより若干より下側に設けられている。実施例では、車輪22の直径は200mm程度であり、ランナー受け部25の前後方向の中央部における底面(ランナー9の載置面)は車輪22の軸線から20mm程度下側に配置されている。
【0029】
さらに、カートの側面視(図2参照)において、ハンドルフレーム23の軸線とランナー受け部25の軸線とのなす夾角θは10度程度に設定され、且つハンドルフレーム23の延びる方向に対してランナー受け部25は下方に配置されている。
【0030】
ハンドルフレーム23の後端部に設けられた把持部24は、上下逆L字状の丸パイプ材などの支持部材30にて形成されている。支持部材30の上部後端のゴム材などからなるグリップが把持部24となる。支持部材30の下端の石突31はゴム材などからなる緩衝体にて構成されている。
【0031】
ロック手段26は、把持部24を有する支持部材30の近傍に配置されている。実施例では、図6及び図7に示すように、ハンドルフレーム23の後端部の上面に、支持金具32が固定されている。支持金具32に貼着されたゴム製などのパッド33の上に後部橇12の下端部12aが載るように構成されている。支持金具32の外面に固定されたブラケット34には、押えアーム35が枢支軸36の周りに回動可能に装着されている。二股状の押えアーム35の先端側には、下端に押えゴム体36を備えた調節ボルト37が上下のナット38a、38b及び座金39を介して装着されている。押えゴム体36と支持金具32のパッド33とにて後部橇12の下端部12aを挟むことができる構成である。
【0032】
押えアーム35における枢支軸36より上側には、L字状の操作レバー40の先端部が第2枢支軸41を介して回動可能に装着されている。また、ブラケット34に回動支点43を有するリンク42が操作レバー40の中途部と連結ピン44にて連結されている。
【0033】
上記の構成により、図7において実線で示すごとく、操作レバー40を時計周りに回動させると、リンク42の回動を介して 押えアーム35が反時計周りに下降する。そして、リンク42の連結ピン44が回動支点43と第2枢支軸41とを結ぶ線を反時計周りに越える(死点越えする)と、押えゴム体36にて後部橇12の下端部12aをパッド33上に固く押圧下状態でロックされるのである。
【0034】
逆に、図7の二点鎖線で示すように、操作レバー40を反時計周りに引き上げると、リンク42が回動支点43を中心にして図7の右方向に回動し、押えアーム35を引き上げ、ロック解除できることになる。
【0035】
本発明のカート20に無人ヘリコプタ1を載せるには、まず、カート1の支持車体21をランナー9の後部に接近させる。ついで、平面視において機体2の前後方向に延びる中心軸線とハンドルフレーム23の軸線とがほぼ一致するように配置すると、左右両側のランナー9の前後方向に延びる軸線とランナー受け部25の軸線とがほぼ一致する。この状態で、作業者はテールボディ4を持ち上げ、両ランナー9の後端と地面45との間に適宜高さの隙間を作る。次いで、この隙間にランナー受け部25を挿入するように、カート1を前進させる。テールボディ4における後部橇12の下端部12aがロック手段26の支持金具32上のパッド33の位置に合わさると、当該ロック手段26により、上述のごとくの操作で下端部12aを位置固定させる。この状態では、左右両ランナー9の前後方向の中途部が左右両ランナー受け部25にきっちりと安定して支持される。
【0036】
このようにして、無人ヘリコプタ1はその左右一対のランナー9と後部橇12の下端部12aとの3箇所が、カート20における左右一対のランナー受け部25と後部のロック手段26との個所で、所謂3点支持される結果、支持状態が安定する。しかも、固定個所は、ロック手段26の1箇所だけで済み、固定作業が簡便となる。
【0037】
ランナー9の延びる方向と直交する方向のランナー受け部25の断面形状が上向き開放の実質的に円弧状に形成されているので、両ランナー受け部25に載置支持されたランナー9がその延びる方向と直交する左右両側方向にずれ動くことや、ひいては無人ヘリコプタ1がカート20上で左右にずれ動いたり左右に対して傾くことが効果的に抑止(防止)でき、安定して無人ヘリコプタ1を地上で運搬できるという効果を奏する。
【0038】
ランナー受け部25の配置高さが車輪22の軸線より低いので、ランナー受け部25にランナー9を載せるための無人ヘリコプタ1のテールボディ4側を持ち上げる高さを少なくでき、作業者の負担が軽減できる。
【0039】
しかも、ランナー受け部25の前後方向に延びる軸線に対しハンドルフレーム23が後方に延びる軸線が上側に向かって適宜角度θで傾斜するよう配置しているから、ランナー受け部25にランナー9を実質的に水平状態で載置したときは、無人ヘリコプタ1の機体2がほぼ水平状であるので、無人ヘリコプタ1の前後方向の荷重の大部分が左右両ランナー受け部25で支持される結果、無人ヘリコプタ1の後部橇12を支持するロック手段26の個所に大きい負荷が作用せず、ハンドルフレーム23の後端の把持部24では作業者が立ち姿勢でカート20を軽快に押し進めることができるという効果を奏する。
【0040】
また、トラックなどの運搬車に運び上げるとき、スロープ状のラダーレール上にカートを容易に押し上げることができる。
【0041】
本発明のカート1の支持車体21やハンドルフレーム23、ランナー受け部25などの強度部品はアルミ等の金属材料であっても良いし、ガラス繊維強化プラスチック材などであっても良い。
【0042】
本発明のカートは、無人ヘリコプタ1ばかりでなく、小型の無人飛行体の運搬にも適用できることはいうまでもない。
【符号の説明】
【0043】
1:無人ヘリコプタ
2:機体
3:メインボディ
4:テールボディ
5:メインロータ
6:テールロータ
8:支持脚
9:ランナー
12:後部橇
20:カート
21:支持車体
22:車輪
23:ハンドルフレーム
24:把持部
25:ランナー受け部
26:ロック手段
【技術分野】
【0001】
本発明は、無人ヘリコプタなど無人飛行体を運搬するためのカートの構造に関する。
【背景技術】
【0002】
無人ヘリコプタは、農薬等の薬剤を散布するため(例えば特許文献1)、あるいは航空写真撮影等のために用いられている。この無人ヘリコプタは、無線操縦機で使用者が地上から機体を見ながら飛行状態に応じて遠隔操作できるものである。
【0003】
ところで、降着装置として車輪の代わりにソリ状のランナー(スキッドともいう)を備えた無人ヘリコプタを、地上に降着させた後、運搬車などに載せるための運搬装置として種々のものが提案されている。
【0004】
例えば、特許文献1の従来技術として、左右一対の車輪を備えた台車と、その左右両側上面に設けられたランナー受け台と、台車の左右中央部から延設されたけん引棒とにより地上けん引装置が構成されたことが開示されている。この装置では、ランナー受け台にヘリコプタにおけるランナーを載置して固定し、けん引棒の先端を牽引車に連結して、ヘリコプタの機体を前方または後方に押して移動させるものであった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平11−20795号公報(図5〜図8参照)
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1の構成では、ヘリコプタの機体の尾部の後ソリの個所を支持するものがないため、機体前後方向の縦揺れいわゆるピッチング及び横揺れに対して不安定であった。また、後ソリの個所の支持部が存在しないため、この部分を支持したり方向を安定させるべく余分の人員が必要となるという問題もあった。
【0007】
本発明は上記従来技術の欠点に鑑みなされたものであって、無人ヘリコプタなどの無人飛行体を地上で安定して運搬(移動)させることができ、且つ少人数で移動させることが可能な運搬装置(カート)を提供することを目的とする。
【課題を解決するための手段】
【0008】
請求項1の発明のカートは、機体下部の左右にランナーが備えられた無人飛行体を運搬するカートであって、少なくとも左右一対の車輪が備えられている支持車体と、該支持車体から延設されたハンドルフレームと、このハンドルフレームの先端に設けられた把持部と、前記支持車体に設けられて前記左右のランナーを支持するためのランナー受け部とを有し、前記無人飛行体の機体後部の後部橇を支持固定するためのロック手段が前記ハンドルフレームに備えられていることを特徴とする。
【0009】
請求項2に記載の発明は、請求項1に記載のカートにおいて、前記両ランナー受け部は、ランナーの延びる方向と直交する方向の断面が上向き円弧状に形成されていることを特徴とする。
【0010】
請求項3に記載の発明は、請求項1または2に記載のカートにおいて、前記両ランナー受け部は、前記左右一対の車輪より左右両側外側に設けられていることを特徴とする。
【0011】
請求項4に記載の発明は、請求項3に記載のカートにおいて、前記両ランナー受け部は、前記左右一対の車輪の車軸より下側に設けられていることを特徴とする。
【0012】
請求項5に記載の発明は、請求項1乃至4のいずれかに記載のカートにおいて、前記ロック手段は、前記把持部の近傍に配置されていることを特徴とする。
【発明の効果】
【0013】
請求項1の発明によれば、支持車体に設けられた左右一対のランナー受け部に無人飛行体における左右のランナーが支持され、支持車体から延びるハンドルフレームのロック手段には無人飛行体における後部橇が支持固定されるので、無人飛行体を3点にて安定して支持できる。しかも、固定個所はロック手段の1個所だけであるので、固定作業も少なくて済み、無人飛行体の運搬作業が簡便に行なえるという効果を奏する。
【0014】
請求項2の発明によれば、前記両ランナー受け部は、ランナーの延びる方向と直交する方向の断面が上向き円弧状に形成されているので、両ランナー受け部に支持されたランナーがその延びる方向と直交する左右両側方向にずれ動くこと、ひいては無人飛行体がカート上で左右にずれ動いたり左右に対して傾くことが効果的に防止でき、安定して運搬できるという効果を奏する。
【0015】
請求項3の発明によれば、前記両ランナー受け部は、前記左右一対の車輪より左右両側外側に設けられているので、カート全体の左右方向の寸法をコンパクトにすることができる。
【0016】
請求項4の発明によれば、請求項3の発明に加えて、前記両ランナー受け部は、前記左右一対の車輪の車軸より下側に設けられているから、両ランナー受け部にランナーを載せるために無人飛行体の機体を持ち上げる高さを少なくできるので、この載せ作業が簡単になるという効果を奏する。
【0017】
請求項5の発明によれば、前記ロック手段は、前記把持部の近傍に配置されているから、作業者の操作範囲をコンパクトにまとめて、複数の操作を簡便に行なえるという効果を奏する。
【図面の簡単な説明】
【0018】
【図1】本発明に係るカートの斜視図である。
【図2】無人ヘリコプタを載置した状態のカートの側面図である。
【図3】図2の上面図である。
【図4】図2の正面図である。
【図5】ランナー受け部の位置及び断面を示す図である。
【図6】後部橇を支持固定するためのロック手段の斜視図である。
【図7】ロック手段の拡大正面図である。
【発明を実施するための形態】
【0019】
図2及び図4に示すように、無人ヘリコプタ1は、メインボディ3とテールボディ4からなる機体2を備える。メインボディ3の上部にメインロータ5が設けられ、テールボディ4の後部にテールロータ6が設けられている。機体2のほぼ中央部のメインボディ3の左右下部に前後対の支持脚8を介してランナー9が設けられている。テールボディ4の後部には下後向きに延びる後部橇12が設けられている。
【0020】
ランナー9は、機体4の前後方向に延びる下片とそれに平行な上片の前後部位を半円部で連結したパイプ製である。ランナー9及び支持脚8はアルミ材または非導電体であるグラスファイバーのFRPで形成されていて良い。
【0021】
ランナー9の前端部上方の機体下部には、機体内のエンジン(不図示)に接続された排気管10に備わるマフラー11が配設される。
【0022】
メインボディ3の後部上側に後部橇12と不図示の自律制御ボックスとが設けられ、自律制御に必要な、GPS制御装置、地上と通信するデータ通信機や画像送信機、及び制御プログラムを組込んだ制御基板などが収容される。自律制御は、機体の位置や速度などの飛行データ、機体の姿勢や方位などの機体データ、エンジン回転数やスロットル開度などの運転状態データ等に基づいて、予め定められた運転モードや制御プログラムを自動的にあるいは地上局からの指令によって選択し、運転状態に応じて最適な操縦制御を行う。
【0023】
この無人ヘリコプタ1は、このような自律制御で飛行できるとともに、飛行状態を目で確認しながら、この飛行状態や機体から送信された各種運転状態データに基づいて、無線操縦機によりマニュアル操作が可能である。
【0024】
図1〜図7は上記無人ヘリコプタ1を地上で運搬するための本発明に係るカート20を示す。
【0025】
カート20は、少なくとも左右一対の車輪22が備えられている支持車体21と、この支持車体21から延設されたハンドルフレーム23と、このハンドルフレーム23の先端に設けられた把持部24と、支持車体21に設けられて左右のランナー9を支持するためのランナー受け部25とを有する。そして、無人ヘリコプタ1の機体後部の後部橇12を支持固定するためのロック手段26がハンドルフレーム23に備えられているものである。
【0026】
支持車体21は、基本的には1本の車軸21aであり、この車軸21aの左右両側にタイヤ製の車輪22が回転自在に枢支されている。車軸21aの左右中央からカートの進行と平行状に延びる1本のパイプ状のハンドルフレーム23と車軸21aとを一対の補強フレーム27にて連結している。
【0027】
ランナー受け部25は左右一対の車輪22より外側に配置されるものである。従って、カート20全体の左右幅寸法をコンパクトにできる。
【0028】
図5に示すように、車軸21aの端部に下向きのブラケット28が溶接などにて固着され、ブラケット28の下部から外向きに突出させた支持ボス29の上にランナー受け部25が溶接などにて固着されている。各ランナー受け部25は車軸21aと直交する方向(ランナー9の延びる方向と直交する方向)の断面が上向き円弧状に形成されている。そして、両ランナー受け部25は、左右一対の車軸21aより若干より下側に設けられている。実施例では、車輪22の直径は200mm程度であり、ランナー受け部25の前後方向の中央部における底面(ランナー9の載置面)は車輪22の軸線から20mm程度下側に配置されている。
【0029】
さらに、カートの側面視(図2参照)において、ハンドルフレーム23の軸線とランナー受け部25の軸線とのなす夾角θは10度程度に設定され、且つハンドルフレーム23の延びる方向に対してランナー受け部25は下方に配置されている。
【0030】
ハンドルフレーム23の後端部に設けられた把持部24は、上下逆L字状の丸パイプ材などの支持部材30にて形成されている。支持部材30の上部後端のゴム材などからなるグリップが把持部24となる。支持部材30の下端の石突31はゴム材などからなる緩衝体にて構成されている。
【0031】
ロック手段26は、把持部24を有する支持部材30の近傍に配置されている。実施例では、図6及び図7に示すように、ハンドルフレーム23の後端部の上面に、支持金具32が固定されている。支持金具32に貼着されたゴム製などのパッド33の上に後部橇12の下端部12aが載るように構成されている。支持金具32の外面に固定されたブラケット34には、押えアーム35が枢支軸36の周りに回動可能に装着されている。二股状の押えアーム35の先端側には、下端に押えゴム体36を備えた調節ボルト37が上下のナット38a、38b及び座金39を介して装着されている。押えゴム体36と支持金具32のパッド33とにて後部橇12の下端部12aを挟むことができる構成である。
【0032】
押えアーム35における枢支軸36より上側には、L字状の操作レバー40の先端部が第2枢支軸41を介して回動可能に装着されている。また、ブラケット34に回動支点43を有するリンク42が操作レバー40の中途部と連結ピン44にて連結されている。
【0033】
上記の構成により、図7において実線で示すごとく、操作レバー40を時計周りに回動させると、リンク42の回動を介して 押えアーム35が反時計周りに下降する。そして、リンク42の連結ピン44が回動支点43と第2枢支軸41とを結ぶ線を反時計周りに越える(死点越えする)と、押えゴム体36にて後部橇12の下端部12aをパッド33上に固く押圧下状態でロックされるのである。
【0034】
逆に、図7の二点鎖線で示すように、操作レバー40を反時計周りに引き上げると、リンク42が回動支点43を中心にして図7の右方向に回動し、押えアーム35を引き上げ、ロック解除できることになる。
【0035】
本発明のカート20に無人ヘリコプタ1を載せるには、まず、カート1の支持車体21をランナー9の後部に接近させる。ついで、平面視において機体2の前後方向に延びる中心軸線とハンドルフレーム23の軸線とがほぼ一致するように配置すると、左右両側のランナー9の前後方向に延びる軸線とランナー受け部25の軸線とがほぼ一致する。この状態で、作業者はテールボディ4を持ち上げ、両ランナー9の後端と地面45との間に適宜高さの隙間を作る。次いで、この隙間にランナー受け部25を挿入するように、カート1を前進させる。テールボディ4における後部橇12の下端部12aがロック手段26の支持金具32上のパッド33の位置に合わさると、当該ロック手段26により、上述のごとくの操作で下端部12aを位置固定させる。この状態では、左右両ランナー9の前後方向の中途部が左右両ランナー受け部25にきっちりと安定して支持される。
【0036】
このようにして、無人ヘリコプタ1はその左右一対のランナー9と後部橇12の下端部12aとの3箇所が、カート20における左右一対のランナー受け部25と後部のロック手段26との個所で、所謂3点支持される結果、支持状態が安定する。しかも、固定個所は、ロック手段26の1箇所だけで済み、固定作業が簡便となる。
【0037】
ランナー9の延びる方向と直交する方向のランナー受け部25の断面形状が上向き開放の実質的に円弧状に形成されているので、両ランナー受け部25に載置支持されたランナー9がその延びる方向と直交する左右両側方向にずれ動くことや、ひいては無人ヘリコプタ1がカート20上で左右にずれ動いたり左右に対して傾くことが効果的に抑止(防止)でき、安定して無人ヘリコプタ1を地上で運搬できるという効果を奏する。
【0038】
ランナー受け部25の配置高さが車輪22の軸線より低いので、ランナー受け部25にランナー9を載せるための無人ヘリコプタ1のテールボディ4側を持ち上げる高さを少なくでき、作業者の負担が軽減できる。
【0039】
しかも、ランナー受け部25の前後方向に延びる軸線に対しハンドルフレーム23が後方に延びる軸線が上側に向かって適宜角度θで傾斜するよう配置しているから、ランナー受け部25にランナー9を実質的に水平状態で載置したときは、無人ヘリコプタ1の機体2がほぼ水平状であるので、無人ヘリコプタ1の前後方向の荷重の大部分が左右両ランナー受け部25で支持される結果、無人ヘリコプタ1の後部橇12を支持するロック手段26の個所に大きい負荷が作用せず、ハンドルフレーム23の後端の把持部24では作業者が立ち姿勢でカート20を軽快に押し進めることができるという効果を奏する。
【0040】
また、トラックなどの運搬車に運び上げるとき、スロープ状のラダーレール上にカートを容易に押し上げることができる。
【0041】
本発明のカート1の支持車体21やハンドルフレーム23、ランナー受け部25などの強度部品はアルミ等の金属材料であっても良いし、ガラス繊維強化プラスチック材などであっても良い。
【0042】
本発明のカートは、無人ヘリコプタ1ばかりでなく、小型の無人飛行体の運搬にも適用できることはいうまでもない。
【符号の説明】
【0043】
1:無人ヘリコプタ
2:機体
3:メインボディ
4:テールボディ
5:メインロータ
6:テールロータ
8:支持脚
9:ランナー
12:後部橇
20:カート
21:支持車体
22:車輪
23:ハンドルフレーム
24:把持部
25:ランナー受け部
26:ロック手段
【特許請求の範囲】
【請求項1】
機体下部の左右にランナーが備えられた無人飛行体を運搬するカートであって、
少なくとも左右一対の車輪が備えられている支持車体と、
該支持車体から延設されたハンドルフレームと、
このハンドルフレームの先端に設けられた把持部と、
前記支持車体に設けられて前記左右のランナーを支持するためのランナー受け部とを有し、
前記無人飛行体の機体後部の後部橇を支持固定するためのロック手段が前記ハンドルフレームに備えられているカート。
【請求項2】
前記両ランナー受け部は、ランナーの延びる方向と直交する方向の断面が上向き円弧状に形成されていることを特徴とする請求項1に記載のカート。
【請求項3】
前記両ランナー受け部は、前記左右一対の車輪より左右両側外側に設けられていることを特徴とする請求項1または2に記載のカート。
【請求項4】
前記両ランナー受け部は、前記左右一対の車輪の車軸より下側に設けられていることを特徴とする請求項3に記載のカート。
【請求項5】
前記ロック手段は、前記把持部の近傍に配置されていることを特徴とする請求項1乃至4のいずれかに記載のカート。
【請求項1】
機体下部の左右にランナーが備えられた無人飛行体を運搬するカートであって、
少なくとも左右一対の車輪が備えられている支持車体と、
該支持車体から延設されたハンドルフレームと、
このハンドルフレームの先端に設けられた把持部と、
前記支持車体に設けられて前記左右のランナーを支持するためのランナー受け部とを有し、
前記無人飛行体の機体後部の後部橇を支持固定するためのロック手段が前記ハンドルフレームに備えられているカート。
【請求項2】
前記両ランナー受け部は、ランナーの延びる方向と直交する方向の断面が上向き円弧状に形成されていることを特徴とする請求項1に記載のカート。
【請求項3】
前記両ランナー受け部は、前記左右一対の車輪より左右両側外側に設けられていることを特徴とする請求項1または2に記載のカート。
【請求項4】
前記両ランナー受け部は、前記左右一対の車輪の車軸より下側に設けられていることを特徴とする請求項3に記載のカート。
【請求項5】
前記ロック手段は、前記把持部の近傍に配置されていることを特徴とする請求項1乃至4のいずれかに記載のカート。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−31801(P2011−31801A)
【公開日】平成23年2月17日(2011.2.17)
【国際特許分類】
【出願番号】特願2009−181497(P2009−181497)
【出願日】平成21年8月4日(2009.8.4)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
【公開日】平成23年2月17日(2011.2.17)
【国際特許分類】
【出願日】平成21年8月4日(2009.8.4)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
[ Back to top ]