
カードおよびカード情報読み取り方法
【課題】カードに記録された情報を高速且つ正確に読み取ることができるカードおよびカード情報読み取り方法を提供する。
【解決手段】カード1の印刷面20には、カード1の位置および姿勢を検出するための位置・姿勢認識用マーク21とカード種別を示すカード種別認識用マーク22とが近赤外光を吸収するインクで印刷されている。位置・姿勢認識用マーク21は、2値化処理を実行した際に当該マーク21の背景部分とは逆の値となり、所定面積以上の面積を有し且つ主軸角が識別可能な形状に形成されて、カード1の重心位置とは異なる位置に主軸L1がカード1の方向に対して所定の方向を向くように表記される。またカード種別認識用マーク22は、画素値が同じ値となる画素を連結した升目22aの面積が上記所定面積よりも小さい値に設定され、位置・姿勢認識用マーク21の重心位置および主軸角によって決められる情報表示領域23に表記される。
【解決手段】カード1の印刷面20には、カード1の位置および姿勢を検出するための位置・姿勢認識用マーク21とカード種別を示すカード種別認識用マーク22とが近赤外光を吸収するインクで印刷されている。位置・姿勢認識用マーク21は、2値化処理を実行した際に当該マーク21の背景部分とは逆の値となり、所定面積以上の面積を有し且つ主軸角が識別可能な形状に形成されて、カード1の重心位置とは異なる位置に主軸L1がカード1の方向に対して所定の方向を向くように表記される。またカード種別認識用マーク22は、画素値が同じ値となる画素を連結した升目22aの面積が上記所定面積よりも小さい値に設定され、位置・姿勢認識用マーク21の重心位置および主軸角によって決められる情報表示領域23に表記される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、カードおよびカード情報読み取り方法に関するものである。
【背景技術】
【0002】
従来、ゲームカードをゲーム装置のゲーム盤に載置すると、ゲーム盤に載置された状態のゲームカードがイメージセンサにより撮像され、その画像データの中からゲームカードのIDコードや、ゲームカードの位置および姿勢(向き)などを同時に解析し、解析結果に応じてゲームを進行させるカードゲーム装置が提供されている(例えば特許文献1)。
【0003】
このカードゲーム装置に使用されるゲームカードには、IDコードやカードの位置および方向などを検出するためのパターンが、例えば近赤外光を吸収するインクで印刷されている。なお、上記のコードパターンは半径の異なる複数のパターンからなり、複数のパターンが同心円状に形成されている。
【0004】
一方、ゲーム装置には、ゲーム盤上に載置されたゲームカードを撮像するカメラが設けられており、ゲームカードの撮像画像をもとにゲームカードの種類(IDコード)や位置、姿勢(方向)を判別し、判別結果に応じてゲームを進行させ、表示画面に表示させるゲーム画面を作成するようになっていた。
【特許文献1】特開2002−301264号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
上述のゲームカードには半径の異なる複数のコードパターンが同心円状に印刷されており、これらのコードパターンをゲーム装置が読み取る際に回転パターンマッチングなどの手法を用いると、位置補正や回転補正などの処理に長い時間が必要になっていた。また、個々のゲームカード毎にIDコードなどの情報が異なっているため、全てのゲームカードの位置、方向およびIDコードなどを照合するためには、パターンマッチングに長時間を要してしまい、ゲームの進行やゲーム画面の切り替えが遅くなるという問題があった。
【0006】
本発明は上記問題点に鑑みて為されたものであり、その目的とするところは、カードに記録された情報を高速且つ正確に読み取ることができるカードおよびカード情報読み取り方法を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、請求項1の発明は、薄板状に形成され平面内の所定位置に位置・姿勢認識用マークおよびカード種別認識用マークを表記したカードが載置されるカード載置面と、カード載置面に載置されたカードを撮像する撮像手段とを有し、撮像手段により撮像された画像から位置・姿勢認識用マークおよびカード種別認識用マークを検出することによりカードの位置、姿勢およびカード種別を検出するカード情報読み取り装置に用いられ、位置・姿勢認識用マークは、所定面積以上の面積を有して主軸角が識別可能な形状であって、2値化処理を実行した際に当該マークの背景部分とは逆の値となるように形成されて、カードの重心位置とは異なる位置に主軸がカードの方向に対して所定の方向を向くように表記されるとともに、カード種別認識用マークは、画素値が同じ値となる画素を連結した画素ブロックの面積が上記所定面積よりも小さい値に設定され、位置・姿勢認識用マークの重心位置および主軸角によって決められる情報表示領域に表記されることを特徴とする。
【0008】
請求項2の発明は、請求項1の発明において、カードの平面形状が矩形状であって、位置・姿勢認識用マークは主軸の方向がカードの一辺と並行になるように表記されたことを特徴とする。
【0009】
請求項3の発明は、請求項1又は2記載のカードの位置、姿勢およびカード種別を検出するカード情報読み取り方法であって、カードを撮像装置により撮像するステップと、撮像画像より画素値が背景と異なる画素領域であって面積が所定面積以上の画素領域を位置・姿勢認識用マークとして検出するステップと、位置・姿勢認識用マークの主軸角を検出するステップと、位置・姿勢認識用マークの位置および主軸角からカードの位置および姿勢を検出するステップと、位置・姿勢認識用マークの位置および主軸角から求まる情報表示領域においてカード種別認識用マークを検出するステップと、カード種別認識用マークの検出結果からカード種別を検出するステップとを有することを特徴とする。
【発明の効果】
【0010】
請求項1の発明によれば、2値化画像から所定面積以上の面積を有するブロブを検出することで、位置・姿勢認識用マークを容易に抽出することができ、抽出した位置・姿勢認識用マークの重心位置および主軸角を検出すれば、カードの重心位置や向きを検出できるので、パターンマッチングなどの手法を用いてカードの位置および姿勢(向き)を検出する場合に比べて短時間、且つ、少ない処理量で位置や姿勢を検出可能なカードを実現できる。しかも、位置・姿勢認識用マークの重心位置および主軸角によって決められる情報表示領域にカード種別認識用マークが表示されているので、位置・姿勢認識用マークの重心位置および主軸角を求めることによってカード種別認識用マークの表示位置が容易に求まり、カード種別を短時間、且つ、少ない処理量で検出可能なカードを実現できるという効果もある。
【0011】
請求項2の発明によれば、位置・姿勢認識用マークの主軸の方向を検出することによって、カードの方向を容易に検出できるという利点がある。
【0012】
請求項3の発明によれば、2値化画像から所定面積以上の面積を有するブロブを検出することで、位置・姿勢認識用マークを容易に抽出することができ、抽出した位置・姿勢認識用マークの重心位置および主軸角を検出すれば、カードの重心位置や向きを検出できるので、パターンマッチングなどの手法を用いてカードの位置および姿勢(向き)を検出する場合に比べて短時間、且つ、少ない処理量でカードの位置や姿勢を検出することができる。しかも、位置・姿勢認識用マークの重心位置および主軸角によって決められる情報表示領域にカード種別認識用マークが表示されているので、位置・姿勢認識用マークの重心位置および主軸角を求めることによってカード種別認識用マークの表示位置が容易に求まり、カード種別を短時間、且つ、少ない処理で検出することができるという効果もある。
【発明を実施するための最良の形態】
【0013】
本発明に係るカード情報読み取り方法を用いたカード情報読み取り装置の一実施形態を図面に基づいて説明する。
【0014】
本実施形態のカード情報読み取り装置は、例えばカードに印刷されたカード情報を読み取ることによって、カードに印刷されたキャラクタの画像を生成してゲーム画面に表示させ、カードの位置および姿勢やカード種別などに応じてゲームを進行するカードゲーム装置に用いられるものである。
【0015】
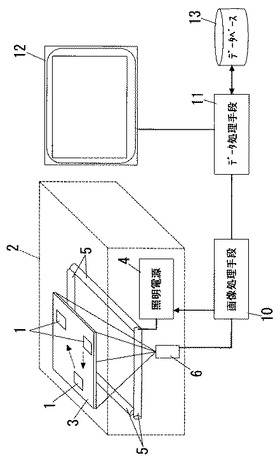
図2はカードゲーム装置の概略構成図であり、カード1が載置されるカード載置面3やカード載置面3に載置されたカード1を撮像する撮像手段を有する読み取り台2と、画像処理手段10と、データ処理手段11と、表示手段12と、データベース13とを備えている。
【0016】
読み取り台2は、近赤外光に対して透光性を有する材料(例えばガラスやアクリル)により矩形板状に形成されたカード載置面3を天井面に備え、内部には、電源装置4から点灯電力が供給されて近赤外光をカード載置面3に裏面側から照射する光源(例えば近赤外光を発光するLEDやハロゲン光源)5と、例えばCCDカメラ、レンズおよび可視光カットフィルタからなりカード載置面3の裏面側に配置されてカード載置面3に載置されたカード1を撮像する近赤外カメラ(撮像手段)6とを収納している。
【0017】
画像処理手段10は例えばDSP処理ボードからなり、近赤外カメラ6の撮像した画像を画像処理することによって、カード載置面3に載置されたカード1のカード種別や位置および姿勢(向き)の検出を行い、検出結果をデータ処理手段11に送信する。
【0018】
表示手段12は、データ処理手段11によって表示が制御され、ゲーム中に発生するイベントに応じたゲーム画面を表示する。
【0019】
データベース13は、カード載置面3に載置されたカード1のカード種別並びにカード1の位置および姿勢(向き)と、ゲームに登場するキャラクタやその動きとを対応付けたデータなどが登録されている。
【0020】
データ処理手段11は例えばパーソナルコンピュータからなり、RS232Cなどの通信規格やPCIバスなどのバス規格に準拠した通信手段(図示せず)を介して画像処理手段10との間で通信を行い、画像処理手段10から受信したデータとデータベース13に登録されたデータとに基づいてゲーム進行に応じて発生するイベントをリアルタイムで処理し、表示手段12に表示させるゲーム画面を切り替える。
【0021】
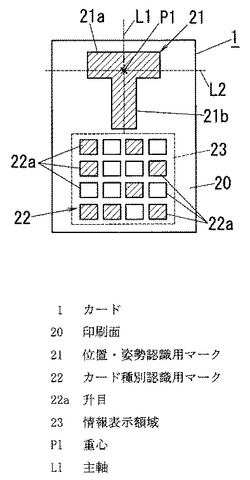
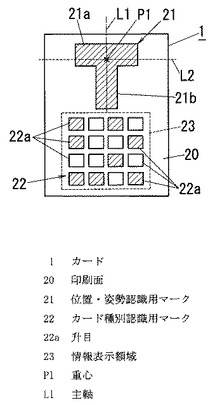
次に本装置により読み取られるカード1について説明する。図1はカード1の裏面(印刷面20)に印刷されたマークの説明図であり、カード1は平面視の形状が縦長の長方形状に形成されており、その印刷面20には位置・姿勢認識用マーク21とカード種別認識用マーク22とが近赤外光を吸収するインクで印刷されている。なお、カード1の印刷面20においてインクが印刷されていない部分は、光源5から照射された近赤外光を反射する材料で形成されており、光源5からの近赤外光はカード1の裏面(印刷面20)で反射されると、印刷面20において位置・姿勢認識用マーク21およびカード種別認識用マーク22の黒塗り部分を除いた領域に照射された近赤外光のみが反射されて近赤外カメラ6に入射する。したがって、近赤外カメラ6の撮像画像は、カード1の背景部分および位置・姿勢認識用マーク21とカード種別認識用マーク22の黒塗り部分が黒、それ以外の部分が白の白黒画像となる。尚、図4および図5では図示を簡単にするためにカード1の背景部分を白の領域として図示してある。
【0022】
位置・姿勢認識用マーク21は、カード1の長手方向一端側に表記されてカード1の短幅方向に沿って延びる矩形の横棒部21aと、横棒部21aの左右方向中央部からカード1の長手方向他端側に向かって延出する矩形の縦棒部21bとでT字形に形成されている。ここで、横棒部21aの図1中左右方向に沿った長さは、縦棒部21bの図1中上下方向に沿った長さよりも短い寸法に設定されており、位置・姿勢認識用マーク21の重心P1は左右方向中央位置であって下方向中央位置よりも上側(横棒部21a側)に位置し、その主軸L1は重心P1を通り縦棒部21bの長手方向と平行している。また位置・姿勢認識用マーク21は、重心P1を通り主軸L1と直交する線分L2に対して非対称な形状に形成され、重心P1から線分L2と直交する方向の片側に縦棒部21bが突出しており、縦棒部21bの突出方向がカード1の重心方向となっている。
【0023】
したがって、位置・姿勢認識用マーク21の重心P1および主軸L1を検出すれば、重心P1を通り主軸L1と直交する方向において縦棒部21bが突出する方向を検出することで、カード1の姿勢(向き)を検出することができ、また位置・姿勢認識用マーク21との相対的な位置関係から、カード種別認識用マーク22が表示される情報表示領域23を検出することもできる。
【0024】
情報表示領域23は、位置・姿勢認識用マーク21の重心P1を通り主軸L1と直交する線分L2に対して縦棒部21bが突出する側に設けられており、情報表示領域23内にカード種別認識用マーク22が表記されている。情報表示領域23には4×4(=16)個の升目22aが設けられ、各々の升目22aを白もしくは黒にすることで16ビットの2進数を表しており、16個の升目22aのパターンによりカード種別認識用マーク22が構成されている。ここで、4×4の升目22aのそれぞれで、所定の輝度値よりも暗い画素数を計数することで黒の面積測定を行い、黒の面積が所定の閾値よりも大きければ升目22aのデータを1、小さければ升目22aのデータを0とすることで、2進数の情報を読み取ることができる。尚、図1、図4〜図6では図示を分かりやすくするため黒塗りの領域をハッチングで示している。また白の升目22aの周りに黒の縁取りを表記しているが、縁取りを無くして白の升目22aには何も表記しないようにすることもできる。
【0025】
ここで、本実施形態のカード情報読み取り装置において、カード載置面3に載置されたカード1のカード情報を読み取る方法について図3および図4にしたがって説明する。
【0026】
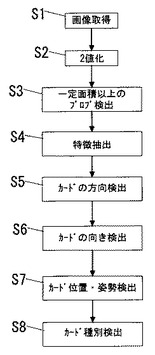
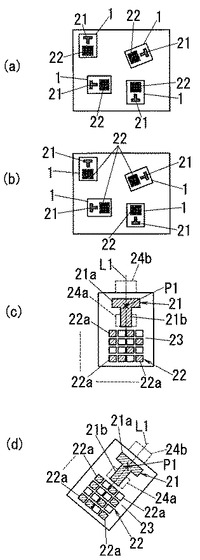
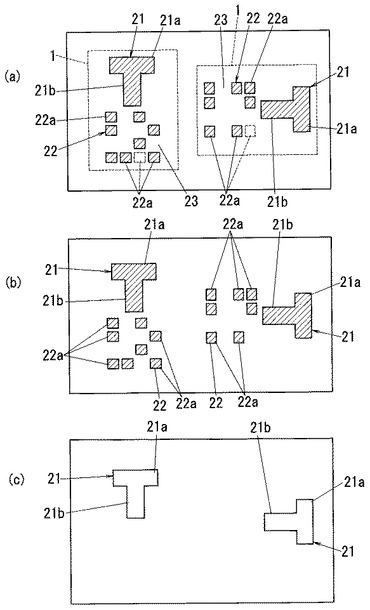
近赤外カメラ6は一定の時間間隔でカード載置面3を裏側から撮像し、カード載置面3に載置されたカード1の画像を取得する(図3のステップS1)。図4(a)および図5(a)はそれぞれ近赤外カメラ6により撮影された画像の一例を示している。そして、画像処理手段10は、近赤外カメラ6により撮像された画像の2値化処理を行って(図3のステップS2)、図5(b)に示すような画像を得た後、スタンフォードアルゴリズムの特徴抽出もしくはブロッブ解析として知られる方式を用いて、カード1の面積よりも小さく且つ一定面積以上のブロブ(画素の塊)を検出する(図3のステップS3)。
【0027】
ここにおいて、上記一定面積とは、位置・姿勢認識用マーク21の面積よりも小さく、且つ、カード種別認識用マーク22の個々の升目22aの面積よりも大きい所定面積に設定されている。また、2値化処理を行った際に位置・姿勢認識用マーク21は背景(カード1(印刷面20)においてマーク21,22以外の領域)とは逆の値(背景が白の場合は黒、背景が黒の場合は白)となるように形成されているので、2値化処理を行った後の画像(図4(b)および図5(c)参照)において、一定面積以上の面積を有するブロブはカード1の背景部分(カード載置面3内でカード1が載置されていない領域)を除いて位置・姿勢認識用マーク21のみとなる。
【0028】
したがって、画像処理手段10では、2値化処理後の画像においてカード1の面積よりも小さく且つ上記所定面積以上の面積を有するブロブを抽出することによって、所定面積よりも小さいカード種別認識用マーク22や他のノイズ成分を排除しつつ、所定面積以上の面積を有する位置・姿勢認識用マーク21のみを抽出することができる(図5(c)参照)。
【0029】
また画像処理手段10は、2値化画像から位置・姿勢認識用マーク21を検出すると、例えば位置・姿勢認識用マーク21の重心位置を検出する特徴抽出を行うとともに(図3のステップS4)、位置・姿勢認識用マーク21の主軸角を検出することで、主軸L1の方向からカード1の方向(長手方向)を検出する(図3のステップS5)。さらに、画像処理手段10では、重心P1から主軸L1に平行な方向の両側に矩形領域からなる検出ウィンドウ24a,24bを設定する(図4(c)(d)参照)。ここで、重心P1から各検出ウィンドウ24a,24bまでの距離は縦棒部21bの長さ寸法よりも短い距離に設定されており、画像処理手段10では、検出ウィンドウ24a,24bにおいて、所定の輝度値よりも暗い画素数を計数することで黒の面積測定を行い、黒の面積が所定の閾値よりも大きければ縦棒部21bが存在すると判断しており、縦棒部21bの突出方向からカード1の向きや、カード種別認識用マーク22bの配置方向を検出する(図3のステップS6)。
【0030】
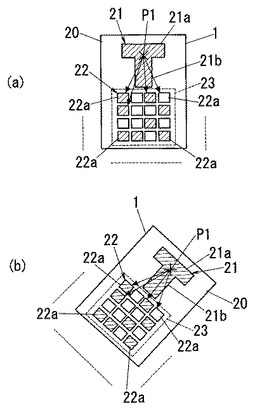
このようにして画像処理手段10ではカード1の位置および姿勢を検出することができ(図3のステップS7)、重心P1の位置とカード1の向きとに基づいて、図6(a)(b)に示すように重心P1から予め設定された相対位置(重心P1からの距離および角度が決められた位置)にある複数(16個)の升目22aの位置を抽出する。そして、画像処理手段10では、各々の升目22a内で黒面積を検出することによって、各々の升目22aのデータを読み取り、各升目22aのデータからカード種別認識用マーク22のデータを検出し、カード1の種別を検出する(図3のステップS8)。
【0031】
その後、画像処理手段10では、カード載置面3に載置されたカード1のカード情報(位置、姿勢およびカード種別)をデータ処理手段11に出力しており、データ処理手段11は、入力されたカード情報とデータベース13に記憶された情報とをもとにゲームを進行させ、発生したイベントに応じたゲーム画面を作成して、表示手段12に表示させる。
【0032】
以上説明したように本実施形態のカード情報読み取り装置に用いられるカード1では、印刷面20に位置・姿勢認識用マーク21とカード種別認識用マーク22とを表記してあり、位置・姿勢認識用マーク21は、2値化処理を実行した際に当該マーク21の背景部分(カード1(印刷面20)におけるマーク21,22以外の部位)とは逆の値となり、所定面積以上の面積を有し且つ主軸角が識別可能な形状に形成されて、カード1の重心位置とは異なる位置に主軸がカード1の方向に対して所定の方向を向くように表記されている。したがって、カード1を撮像した画像を2値化処理した後で、カード1の面積よりも小さく且つ所定面積以上のブロブを検出することにより位置・姿勢認識用マーク21を容易に抽出することができる。
【0033】
しかも、位置・姿勢認識用マーク21は主軸角が識別可能な形状に形成されており、カード1の重心位置とは異なる位置に、その主軸がカード1の方向に対して所定の方向を向くように表記されているので、位置・姿勢認識用マーク21の重心位置と主軸角とを用いて、カード1の位置および姿勢を容易に求めることができる。よって、従来例のようにパターンマッチングなどの手法を用いて撮像画像からカード1の画像を抽出する場合に比べて、カード1の位置および姿勢を短時間で且つ少ない処理量で検出することができるという利点がある。なお本実施形態では位置・姿勢認識用マーク21をT字形に形成しているが、主軸角が識別可能であって、向きも識別できるような形状であればどのような形状でも良く、例えば「↑」のような形状でも良い。また、位置・姿勢認識用マーク21は、その主軸L1の方向がカード1の一辺と平行になるように配置されているので、主軸L1の方向からカード1の方向を容易に検出することができるという利点がある。
【0034】
また、カード種別認識用マーク22は、画素値が同じ値となる画素を連結した画素ブロック(升目22a)の面積が上記所定面積よりも小さい値に設定され、位置・姿勢認識用マーク21の重心位置および主軸角によって決められる情報表示領域23に表記されており、位置・姿勢認識用マーク21の重心位置や主軸角が検出されると、画像処理手段10では、検出された重心位置および主軸角に基づいて、重心P1から相対的に決められた領域(情報表示領域23)内に表示されたカード種別認識用マーク22の情報を読み込むことで、カード1の種別を容易に検出することができる。したがって、従来例のようにカード種別情報をパターンマッチングなどの手法を用いてカード1から読み取る場合に比べ、短時間且つ少ない処理量でカード種別を読み取ることができるという利点もある。
【図面の簡単な説明】
【0035】
【図1】本実施形態のカードの説明図である。
【図2】同上のカードの読み取りに用いられるカード情報読み取り装置の概略構成図である。
【図3】同上の動作を説明するフローチャートである。
【図4】(a)〜(d)は同上の画像処理方法を説明する説明図である。
【図5】(a)〜(c)は同上の画像処理方法を説明する説明図である。
【図6】(a)(b)は同上の画像処理方法を説明する説明図である。
【符号の説明】
【0036】
1 カード
2 読み取り台
3 カード載置面
5 光源
6 撮像手段
10 画像処理手段
11 データ処理手段
12 表示手段
13 データベース
20 印刷面
21 位置・姿勢認識用マーク
22 カード種別認識用マーク
22a 升目
23 情報表示領域
P1 重心
L1 主軸
【技術分野】
【0001】
本発明は、カードおよびカード情報読み取り方法に関するものである。
【背景技術】
【0002】
従来、ゲームカードをゲーム装置のゲーム盤に載置すると、ゲーム盤に載置された状態のゲームカードがイメージセンサにより撮像され、その画像データの中からゲームカードのIDコードや、ゲームカードの位置および姿勢(向き)などを同時に解析し、解析結果に応じてゲームを進行させるカードゲーム装置が提供されている(例えば特許文献1)。
【0003】
このカードゲーム装置に使用されるゲームカードには、IDコードやカードの位置および方向などを検出するためのパターンが、例えば近赤外光を吸収するインクで印刷されている。なお、上記のコードパターンは半径の異なる複数のパターンからなり、複数のパターンが同心円状に形成されている。
【0004】
一方、ゲーム装置には、ゲーム盤上に載置されたゲームカードを撮像するカメラが設けられており、ゲームカードの撮像画像をもとにゲームカードの種類(IDコード)や位置、姿勢(方向)を判別し、判別結果に応じてゲームを進行させ、表示画面に表示させるゲーム画面を作成するようになっていた。
【特許文献1】特開2002−301264号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
上述のゲームカードには半径の異なる複数のコードパターンが同心円状に印刷されており、これらのコードパターンをゲーム装置が読み取る際に回転パターンマッチングなどの手法を用いると、位置補正や回転補正などの処理に長い時間が必要になっていた。また、個々のゲームカード毎にIDコードなどの情報が異なっているため、全てのゲームカードの位置、方向およびIDコードなどを照合するためには、パターンマッチングに長時間を要してしまい、ゲームの進行やゲーム画面の切り替えが遅くなるという問題があった。
【0006】
本発明は上記問題点に鑑みて為されたものであり、その目的とするところは、カードに記録された情報を高速且つ正確に読み取ることができるカードおよびカード情報読み取り方法を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、請求項1の発明は、薄板状に形成され平面内の所定位置に位置・姿勢認識用マークおよびカード種別認識用マークを表記したカードが載置されるカード載置面と、カード載置面に載置されたカードを撮像する撮像手段とを有し、撮像手段により撮像された画像から位置・姿勢認識用マークおよびカード種別認識用マークを検出することによりカードの位置、姿勢およびカード種別を検出するカード情報読み取り装置に用いられ、位置・姿勢認識用マークは、所定面積以上の面積を有して主軸角が識別可能な形状であって、2値化処理を実行した際に当該マークの背景部分とは逆の値となるように形成されて、カードの重心位置とは異なる位置に主軸がカードの方向に対して所定の方向を向くように表記されるとともに、カード種別認識用マークは、画素値が同じ値となる画素を連結した画素ブロックの面積が上記所定面積よりも小さい値に設定され、位置・姿勢認識用マークの重心位置および主軸角によって決められる情報表示領域に表記されることを特徴とする。
【0008】
請求項2の発明は、請求項1の発明において、カードの平面形状が矩形状であって、位置・姿勢認識用マークは主軸の方向がカードの一辺と並行になるように表記されたことを特徴とする。
【0009】
請求項3の発明は、請求項1又は2記載のカードの位置、姿勢およびカード種別を検出するカード情報読み取り方法であって、カードを撮像装置により撮像するステップと、撮像画像より画素値が背景と異なる画素領域であって面積が所定面積以上の画素領域を位置・姿勢認識用マークとして検出するステップと、位置・姿勢認識用マークの主軸角を検出するステップと、位置・姿勢認識用マークの位置および主軸角からカードの位置および姿勢を検出するステップと、位置・姿勢認識用マークの位置および主軸角から求まる情報表示領域においてカード種別認識用マークを検出するステップと、カード種別認識用マークの検出結果からカード種別を検出するステップとを有することを特徴とする。
【発明の効果】
【0010】
請求項1の発明によれば、2値化画像から所定面積以上の面積を有するブロブを検出することで、位置・姿勢認識用マークを容易に抽出することができ、抽出した位置・姿勢認識用マークの重心位置および主軸角を検出すれば、カードの重心位置や向きを検出できるので、パターンマッチングなどの手法を用いてカードの位置および姿勢(向き)を検出する場合に比べて短時間、且つ、少ない処理量で位置や姿勢を検出可能なカードを実現できる。しかも、位置・姿勢認識用マークの重心位置および主軸角によって決められる情報表示領域にカード種別認識用マークが表示されているので、位置・姿勢認識用マークの重心位置および主軸角を求めることによってカード種別認識用マークの表示位置が容易に求まり、カード種別を短時間、且つ、少ない処理量で検出可能なカードを実現できるという効果もある。
【0011】
請求項2の発明によれば、位置・姿勢認識用マークの主軸の方向を検出することによって、カードの方向を容易に検出できるという利点がある。
【0012】
請求項3の発明によれば、2値化画像から所定面積以上の面積を有するブロブを検出することで、位置・姿勢認識用マークを容易に抽出することができ、抽出した位置・姿勢認識用マークの重心位置および主軸角を検出すれば、カードの重心位置や向きを検出できるので、パターンマッチングなどの手法を用いてカードの位置および姿勢(向き)を検出する場合に比べて短時間、且つ、少ない処理量でカードの位置や姿勢を検出することができる。しかも、位置・姿勢認識用マークの重心位置および主軸角によって決められる情報表示領域にカード種別認識用マークが表示されているので、位置・姿勢認識用マークの重心位置および主軸角を求めることによってカード種別認識用マークの表示位置が容易に求まり、カード種別を短時間、且つ、少ない処理で検出することができるという効果もある。
【発明を実施するための最良の形態】
【0013】
本発明に係るカード情報読み取り方法を用いたカード情報読み取り装置の一実施形態を図面に基づいて説明する。
【0014】
本実施形態のカード情報読み取り装置は、例えばカードに印刷されたカード情報を読み取ることによって、カードに印刷されたキャラクタの画像を生成してゲーム画面に表示させ、カードの位置および姿勢やカード種別などに応じてゲームを進行するカードゲーム装置に用いられるものである。
【0015】
図2はカードゲーム装置の概略構成図であり、カード1が載置されるカード載置面3やカード載置面3に載置されたカード1を撮像する撮像手段を有する読み取り台2と、画像処理手段10と、データ処理手段11と、表示手段12と、データベース13とを備えている。
【0016】
読み取り台2は、近赤外光に対して透光性を有する材料(例えばガラスやアクリル)により矩形板状に形成されたカード載置面3を天井面に備え、内部には、電源装置4から点灯電力が供給されて近赤外光をカード載置面3に裏面側から照射する光源(例えば近赤外光を発光するLEDやハロゲン光源)5と、例えばCCDカメラ、レンズおよび可視光カットフィルタからなりカード載置面3の裏面側に配置されてカード載置面3に載置されたカード1を撮像する近赤外カメラ(撮像手段)6とを収納している。
【0017】
画像処理手段10は例えばDSP処理ボードからなり、近赤外カメラ6の撮像した画像を画像処理することによって、カード載置面3に載置されたカード1のカード種別や位置および姿勢(向き)の検出を行い、検出結果をデータ処理手段11に送信する。
【0018】
表示手段12は、データ処理手段11によって表示が制御され、ゲーム中に発生するイベントに応じたゲーム画面を表示する。
【0019】
データベース13は、カード載置面3に載置されたカード1のカード種別並びにカード1の位置および姿勢(向き)と、ゲームに登場するキャラクタやその動きとを対応付けたデータなどが登録されている。
【0020】
データ処理手段11は例えばパーソナルコンピュータからなり、RS232Cなどの通信規格やPCIバスなどのバス規格に準拠した通信手段(図示せず)を介して画像処理手段10との間で通信を行い、画像処理手段10から受信したデータとデータベース13に登録されたデータとに基づいてゲーム進行に応じて発生するイベントをリアルタイムで処理し、表示手段12に表示させるゲーム画面を切り替える。
【0021】
次に本装置により読み取られるカード1について説明する。図1はカード1の裏面(印刷面20)に印刷されたマークの説明図であり、カード1は平面視の形状が縦長の長方形状に形成されており、その印刷面20には位置・姿勢認識用マーク21とカード種別認識用マーク22とが近赤外光を吸収するインクで印刷されている。なお、カード1の印刷面20においてインクが印刷されていない部分は、光源5から照射された近赤外光を反射する材料で形成されており、光源5からの近赤外光はカード1の裏面(印刷面20)で反射されると、印刷面20において位置・姿勢認識用マーク21およびカード種別認識用マーク22の黒塗り部分を除いた領域に照射された近赤外光のみが反射されて近赤外カメラ6に入射する。したがって、近赤外カメラ6の撮像画像は、カード1の背景部分および位置・姿勢認識用マーク21とカード種別認識用マーク22の黒塗り部分が黒、それ以外の部分が白の白黒画像となる。尚、図4および図5では図示を簡単にするためにカード1の背景部分を白の領域として図示してある。
【0022】
位置・姿勢認識用マーク21は、カード1の長手方向一端側に表記されてカード1の短幅方向に沿って延びる矩形の横棒部21aと、横棒部21aの左右方向中央部からカード1の長手方向他端側に向かって延出する矩形の縦棒部21bとでT字形に形成されている。ここで、横棒部21aの図1中左右方向に沿った長さは、縦棒部21bの図1中上下方向に沿った長さよりも短い寸法に設定されており、位置・姿勢認識用マーク21の重心P1は左右方向中央位置であって下方向中央位置よりも上側(横棒部21a側)に位置し、その主軸L1は重心P1を通り縦棒部21bの長手方向と平行している。また位置・姿勢認識用マーク21は、重心P1を通り主軸L1と直交する線分L2に対して非対称な形状に形成され、重心P1から線分L2と直交する方向の片側に縦棒部21bが突出しており、縦棒部21bの突出方向がカード1の重心方向となっている。
【0023】
したがって、位置・姿勢認識用マーク21の重心P1および主軸L1を検出すれば、重心P1を通り主軸L1と直交する方向において縦棒部21bが突出する方向を検出することで、カード1の姿勢(向き)を検出することができ、また位置・姿勢認識用マーク21との相対的な位置関係から、カード種別認識用マーク22が表示される情報表示領域23を検出することもできる。
【0024】
情報表示領域23は、位置・姿勢認識用マーク21の重心P1を通り主軸L1と直交する線分L2に対して縦棒部21bが突出する側に設けられており、情報表示領域23内にカード種別認識用マーク22が表記されている。情報表示領域23には4×4(=16)個の升目22aが設けられ、各々の升目22aを白もしくは黒にすることで16ビットの2進数を表しており、16個の升目22aのパターンによりカード種別認識用マーク22が構成されている。ここで、4×4の升目22aのそれぞれで、所定の輝度値よりも暗い画素数を計数することで黒の面積測定を行い、黒の面積が所定の閾値よりも大きければ升目22aのデータを1、小さければ升目22aのデータを0とすることで、2進数の情報を読み取ることができる。尚、図1、図4〜図6では図示を分かりやすくするため黒塗りの領域をハッチングで示している。また白の升目22aの周りに黒の縁取りを表記しているが、縁取りを無くして白の升目22aには何も表記しないようにすることもできる。
【0025】
ここで、本実施形態のカード情報読み取り装置において、カード載置面3に載置されたカード1のカード情報を読み取る方法について図3および図4にしたがって説明する。
【0026】
近赤外カメラ6は一定の時間間隔でカード載置面3を裏側から撮像し、カード載置面3に載置されたカード1の画像を取得する(図3のステップS1)。図4(a)および図5(a)はそれぞれ近赤外カメラ6により撮影された画像の一例を示している。そして、画像処理手段10は、近赤外カメラ6により撮像された画像の2値化処理を行って(図3のステップS2)、図5(b)に示すような画像を得た後、スタンフォードアルゴリズムの特徴抽出もしくはブロッブ解析として知られる方式を用いて、カード1の面積よりも小さく且つ一定面積以上のブロブ(画素の塊)を検出する(図3のステップS3)。
【0027】
ここにおいて、上記一定面積とは、位置・姿勢認識用マーク21の面積よりも小さく、且つ、カード種別認識用マーク22の個々の升目22aの面積よりも大きい所定面積に設定されている。また、2値化処理を行った際に位置・姿勢認識用マーク21は背景(カード1(印刷面20)においてマーク21,22以外の領域)とは逆の値(背景が白の場合は黒、背景が黒の場合は白)となるように形成されているので、2値化処理を行った後の画像(図4(b)および図5(c)参照)において、一定面積以上の面積を有するブロブはカード1の背景部分(カード載置面3内でカード1が載置されていない領域)を除いて位置・姿勢認識用マーク21のみとなる。
【0028】
したがって、画像処理手段10では、2値化処理後の画像においてカード1の面積よりも小さく且つ上記所定面積以上の面積を有するブロブを抽出することによって、所定面積よりも小さいカード種別認識用マーク22や他のノイズ成分を排除しつつ、所定面積以上の面積を有する位置・姿勢認識用マーク21のみを抽出することができる(図5(c)参照)。
【0029】
また画像処理手段10は、2値化画像から位置・姿勢認識用マーク21を検出すると、例えば位置・姿勢認識用マーク21の重心位置を検出する特徴抽出を行うとともに(図3のステップS4)、位置・姿勢認識用マーク21の主軸角を検出することで、主軸L1の方向からカード1の方向(長手方向)を検出する(図3のステップS5)。さらに、画像処理手段10では、重心P1から主軸L1に平行な方向の両側に矩形領域からなる検出ウィンドウ24a,24bを設定する(図4(c)(d)参照)。ここで、重心P1から各検出ウィンドウ24a,24bまでの距離は縦棒部21bの長さ寸法よりも短い距離に設定されており、画像処理手段10では、検出ウィンドウ24a,24bにおいて、所定の輝度値よりも暗い画素数を計数することで黒の面積測定を行い、黒の面積が所定の閾値よりも大きければ縦棒部21bが存在すると判断しており、縦棒部21bの突出方向からカード1の向きや、カード種別認識用マーク22bの配置方向を検出する(図3のステップS6)。
【0030】
このようにして画像処理手段10ではカード1の位置および姿勢を検出することができ(図3のステップS7)、重心P1の位置とカード1の向きとに基づいて、図6(a)(b)に示すように重心P1から予め設定された相対位置(重心P1からの距離および角度が決められた位置)にある複数(16個)の升目22aの位置を抽出する。そして、画像処理手段10では、各々の升目22a内で黒面積を検出することによって、各々の升目22aのデータを読み取り、各升目22aのデータからカード種別認識用マーク22のデータを検出し、カード1の種別を検出する(図3のステップS8)。
【0031】
その後、画像処理手段10では、カード載置面3に載置されたカード1のカード情報(位置、姿勢およびカード種別)をデータ処理手段11に出力しており、データ処理手段11は、入力されたカード情報とデータベース13に記憶された情報とをもとにゲームを進行させ、発生したイベントに応じたゲーム画面を作成して、表示手段12に表示させる。
【0032】
以上説明したように本実施形態のカード情報読み取り装置に用いられるカード1では、印刷面20に位置・姿勢認識用マーク21とカード種別認識用マーク22とを表記してあり、位置・姿勢認識用マーク21は、2値化処理を実行した際に当該マーク21の背景部分(カード1(印刷面20)におけるマーク21,22以外の部位)とは逆の値となり、所定面積以上の面積を有し且つ主軸角が識別可能な形状に形成されて、カード1の重心位置とは異なる位置に主軸がカード1の方向に対して所定の方向を向くように表記されている。したがって、カード1を撮像した画像を2値化処理した後で、カード1の面積よりも小さく且つ所定面積以上のブロブを検出することにより位置・姿勢認識用マーク21を容易に抽出することができる。
【0033】
しかも、位置・姿勢認識用マーク21は主軸角が識別可能な形状に形成されており、カード1の重心位置とは異なる位置に、その主軸がカード1の方向に対して所定の方向を向くように表記されているので、位置・姿勢認識用マーク21の重心位置と主軸角とを用いて、カード1の位置および姿勢を容易に求めることができる。よって、従来例のようにパターンマッチングなどの手法を用いて撮像画像からカード1の画像を抽出する場合に比べて、カード1の位置および姿勢を短時間で且つ少ない処理量で検出することができるという利点がある。なお本実施形態では位置・姿勢認識用マーク21をT字形に形成しているが、主軸角が識別可能であって、向きも識別できるような形状であればどのような形状でも良く、例えば「↑」のような形状でも良い。また、位置・姿勢認識用マーク21は、その主軸L1の方向がカード1の一辺と平行になるように配置されているので、主軸L1の方向からカード1の方向を容易に検出することができるという利点がある。
【0034】
また、カード種別認識用マーク22は、画素値が同じ値となる画素を連結した画素ブロック(升目22a)の面積が上記所定面積よりも小さい値に設定され、位置・姿勢認識用マーク21の重心位置および主軸角によって決められる情報表示領域23に表記されており、位置・姿勢認識用マーク21の重心位置や主軸角が検出されると、画像処理手段10では、検出された重心位置および主軸角に基づいて、重心P1から相対的に決められた領域(情報表示領域23)内に表示されたカード種別認識用マーク22の情報を読み込むことで、カード1の種別を容易に検出することができる。したがって、従来例のようにカード種別情報をパターンマッチングなどの手法を用いてカード1から読み取る場合に比べ、短時間且つ少ない処理量でカード種別を読み取ることができるという利点もある。
【図面の簡単な説明】
【0035】
【図1】本実施形態のカードの説明図である。
【図2】同上のカードの読み取りに用いられるカード情報読み取り装置の概略構成図である。
【図3】同上の動作を説明するフローチャートである。
【図4】(a)〜(d)は同上の画像処理方法を説明する説明図である。
【図5】(a)〜(c)は同上の画像処理方法を説明する説明図である。
【図6】(a)(b)は同上の画像処理方法を説明する説明図である。
【符号の説明】
【0036】
1 カード
2 読み取り台
3 カード載置面
5 光源
6 撮像手段
10 画像処理手段
11 データ処理手段
12 表示手段
13 データベース
20 印刷面
21 位置・姿勢認識用マーク
22 カード種別認識用マーク
22a 升目
23 情報表示領域
P1 重心
L1 主軸
【特許請求の範囲】
【請求項1】
薄板状に形成され平面内の所定位置に位置・姿勢認識用マークおよびカード種別認識用マークを表記したカードが載置されるカード載置面と、カード載置面に載置されたカードを撮像する撮像手段とを有し、撮像手段により撮像された画像から位置・姿勢認識用マークおよびカード種別認識用マークを検出することによりカードの位置、姿勢およびカード種別を検出するカード情報読み取り装置に用いられ、
位置・姿勢認識用マークは、所定面積以上の面積を有して主軸角が識別可能な形状であって、2値化処理を実行した際に当該マークの背景部分とは逆の値となるように形成されて、カードの重心位置とは異なる位置に主軸がカードの方向に対して所定の方向を向くように表記されるとともに、
カード種別認識用マークは、画素値が同じ値となる画素を連結した画素ブロックの面積が上記所定面積よりも小さい値に設定され、位置・姿勢認識用マークの重心位置および主軸角によって決められる情報表示領域に表記されることを特徴とするカード。
【請求項2】
カードの平面形状が矩形状であって、位置・姿勢認識用マークは主軸の方向がカードの一辺と並行になるように表記されたことを特徴とする請求項1記載のカード。
【請求項3】
請求項1又は2記載のカードの位置、姿勢およびカード種別を検出するカード情報読み取り方法であって、
カードを撮像装置により撮像するステップと、撮像画像より画素値が背景と異なる画素領域であって面積が所定面積以上の画素領域を位置・姿勢認識用マークとして検出するステップと、位置・姿勢認識用マークの主軸角を検出するステップと、位置・姿勢認識用マークの位置および主軸角からカードの位置および姿勢を検出するステップと、位置・姿勢認識用マークの位置および主軸角から求まる情報表示領域においてカード種別認識用マークを検出するステップと、カード種別認識用マークの検出結果からカード種別を検出するステップとを有することを特徴とするカード情報読み取り方法。
【請求項1】
薄板状に形成され平面内の所定位置に位置・姿勢認識用マークおよびカード種別認識用マークを表記したカードが載置されるカード載置面と、カード載置面に載置されたカードを撮像する撮像手段とを有し、撮像手段により撮像された画像から位置・姿勢認識用マークおよびカード種別認識用マークを検出することによりカードの位置、姿勢およびカード種別を検出するカード情報読み取り装置に用いられ、
位置・姿勢認識用マークは、所定面積以上の面積を有して主軸角が識別可能な形状であって、2値化処理を実行した際に当該マークの背景部分とは逆の値となるように形成されて、カードの重心位置とは異なる位置に主軸がカードの方向に対して所定の方向を向くように表記されるとともに、
カード種別認識用マークは、画素値が同じ値となる画素を連結した画素ブロックの面積が上記所定面積よりも小さい値に設定され、位置・姿勢認識用マークの重心位置および主軸角によって決められる情報表示領域に表記されることを特徴とするカード。
【請求項2】
カードの平面形状が矩形状であって、位置・姿勢認識用マークは主軸の方向がカードの一辺と並行になるように表記されたことを特徴とする請求項1記載のカード。
【請求項3】
請求項1又は2記載のカードの位置、姿勢およびカード種別を検出するカード情報読み取り方法であって、
カードを撮像装置により撮像するステップと、撮像画像より画素値が背景と異なる画素領域であって面積が所定面積以上の画素領域を位置・姿勢認識用マークとして検出するステップと、位置・姿勢認識用マークの主軸角を検出するステップと、位置・姿勢認識用マークの位置および主軸角からカードの位置および姿勢を検出するステップと、位置・姿勢認識用マークの位置および主軸角から求まる情報表示領域においてカード種別認識用マークを検出するステップと、カード種別認識用マークの検出結果からカード種別を検出するステップとを有することを特徴とするカード情報読み取り方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2008−265169(P2008−265169A)
【公開日】平成20年11月6日(2008.11.6)
【国際特許分類】
【出願番号】特願2007−112328(P2007−112328)
【出願日】平成19年4月20日(2007.4.20)
【出願人】(000005832)松下電工株式会社 (17,916)
【Fターム(参考)】
【公開日】平成20年11月6日(2008.11.6)
【国際特許分類】
【出願日】平成19年4月20日(2007.4.20)
【出願人】(000005832)松下電工株式会社 (17,916)
【Fターム(参考)】
[ Back to top ]