
カードリーダ/ライタ、カード位置情報生成方法およびカード位置情報生成プログラム
【課題】カード搬送路に入り込んだレシート、塵の塊等の異物の影響を受け難いカードリーダ/ライタの提供。
【解決手段】変位センサ1a・・・は、従動ローラ2a・・・の変位に応じた信号1a0・・・を出力する。信号1a0・・・のレベルは、駆動ローラ3a・・・と、対をなす従動ローラ2a・・・との間に何も挟まれないときは、閾値h1以下、磁気カード4が挟まれたときは閾値h2以上閾値h3以下である。磁気カード4の搬送路にレシート、塵の塊等の異物が入り込んだだけでは、そのレベルは、閾値h1を越えるが、h2未満であるから、磁気カード4が挿入されたと誤認することはない。レシート等の薄い物が挟まれたとき、そのレベルは閾値h1とh2の間の値となり、磁気カード4と区別できる。
【解決手段】変位センサ1a・・・は、従動ローラ2a・・・の変位に応じた信号1a0・・・を出力する。信号1a0・・・のレベルは、駆動ローラ3a・・・と、対をなす従動ローラ2a・・・との間に何も挟まれないときは、閾値h1以下、磁気カード4が挟まれたときは閾値h2以上閾値h3以下である。磁気カード4の搬送路にレシート、塵の塊等の異物が入り込んだだけでは、そのレベルは、閾値h1を越えるが、h2未満であるから、磁気カード4が挿入されたと誤認することはない。レシート等の薄い物が挟まれたとき、そのレベルは閾値h1とh2の間の値となり、磁気カード4と区別できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ATM(現金自動預け払い機)や、POS(販売時点情報管理)システム等において、磁気カードやICカードといった情報記録カードに対し情報の読取りまたは書込みのうちの少なくとも一方を行うカードリーダ/ライタ、並びにそのカードリーダ/ライタに適用するカード位置情報生成方法およびカード位置情報生成プログラムに関する。
【背景技術】
【0002】
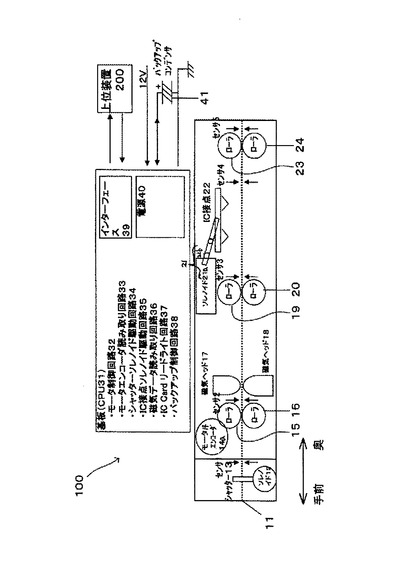
図3は、特許文献1(特開2009−31890公報)に開示された情報記録媒体処理装置用カードリーダ100の主要構成の概要を示す概念図である。この特許文献1の図1および明細書の段落0033,0034,0036等に記載されているように、カードリーダ100は、磁気カード又はICカードの取り込み口となるカード挿入口11、外の粉塵や異物が入り込むのを防ぐシャッター13、このシャッター13を変位駆動するソレノイド12、挿入されたカードを搬送する搬送手段、この搬送手段を駆動する駆動モータ14、センサ1〜5などを有してなる。その搬送手段は、第1の一対のローラ15,16,第2の一対のローラ19,20及び第3の一対のローラ23,24でなる。ローラ15,19及び23は駆動ローラである。ローラ16,20及び24は従動ローラであり、駆動ローラ15,19及び23によりそれぞれ駆動される。
【0003】
センサ1〜5は、カードリーダ100内に挿入されたカードの端部を検知する光学式位置検知センサであり、発光素子(フォトダイオード)と受光素子(フォトセンサ)を、搬送路を挟むように配置してなる。センサ1〜5の出力は、発光素子と受光素子との間の光路がカードによって遮られた時に変化する。そこで、センサ1〜5の出力の変化により、カードの端部が発光素子と受光素子との間の光路を通過したことを把握することができる。カードリーダ100は、センサ1〜5の信号出力に基づいて、搬送方向におけるカードの位置を検出する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−31890号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述のとおり、特許文献1に記載されたカードリーダ100は、センサ1〜5でなる光学式位置検知センサにより、カードの端が光路を通過した時を表す信号を基にカードの位置情報を生成するカード位置情報生成方法を採用している。ところが、このような光学式位置検知センサによるカード位置情報生成方法では、センサにおける発光素子と受光素子との間の光路に何らかの光遮断物が入り込むと、それがカードではなくても、カードと誤認し、誤ったカード位置情報を生成してしまう。カード以外の光遮断物、即ち異物としては、カードに付着してカードリーダ100のカード挿入口11から入り込むレシート(受領書)、糸くず、カードリーダ/ライタの中に溜まった塵の塊などがある。カードリーダ/ライタにおけるカード搬送路付近に溜まった塵の塊が、挿入されたカードに付着することがある。カードリーダ/ライタ中の光路近傍の部材に溜まった塵の塊が光路を遮ることもある。
【0006】
また、カードに透明な領域があると、光学式位置検知センサは、カードの端だけでなく、カードにおける透明領域と不透明領域との境界も検出するので、不透明カードを対象とする図3のカードリーダ100では、カードの正しい位置を検出することができない。
【0007】
さらに、図3の光学式位置検知センサでは、発光素子と受光素子とが、カードの搬送路を挟んでそれぞれの側に配置されるので、部品を一箇所に集約することができず、構成が複雑になり、カードリーダ100全体の製造費低減を難しくする。
【0008】
そこで、本発明は、かかる課題を解決するために、カード搬送路に入り込んだレシート等の異物の影響を受け難く、透明領域のあるカードの正しい位置情報も生成でき、しかもカード搬送路の片側にカード位置検出センサの部品を集約できるカードリーダ/ライタ、並びにこのようなカードリーダ/ライタに適用できるカード位置情報生成方法およびカード位置情報生成プログラムの提供を目的とする。
【課題を解決するための手段】
【0009】
前述の課題を解決するため、本発明によるカードリーダ/ライタ、カード位置情報生成方法およびカード位置情報生成プログラムは、主に、次のような特徴的な構成を採用している。
【0010】
(1)本発明によるカードリーダ/ライタは、位置が固定されている第1の軸を回転中心とする駆動ローラと、該第1の軸に平行であって該第1の軸との距離が可変である第2の軸を回転中心とする従動ローラとを有し、該従動ローラを該駆動ローラに向けて押し付けようとする付勢力が該第2の軸に加えられており、該駆動ローラと該従動ローラとの間に情報記録カードを挟み、該駆動ローラの回転により該情報記録カードの搬送をする情報記録カード搬送手段と、
前記第1の軸に対する前記第2の軸の変位を検出する変位センサと、
前記変位センサで検出した前記変位に基づき、前記搬送の方向における前記情報記録カードの位置の情報を生成するカード位置情報生成手段と
を有する。
(2)本発明によるカード位置情報生成方法は、位置が固定されている第1の軸を回転中心とする駆動ローラと、該第1の軸に平行であって該第1の軸との距離が可変である第2の軸を回転中心とし、該従動ローラを該駆動ローラに向けて押し付けるように該第2の軸を付勢し、該駆動ローラと該従動ローラとの間に情報記録カードを挟み、該駆動ローラの回転により該情報記録カードの搬送をし、
前記第1の軸に対する前記第2の軸の変位を検出し、
前記変位に基づき、前記搬送の方向における前記情報記録カードの位置の情報を生成する。
(3)また、本発明によるカード位置情報生成プログラムは、上記(2)に記載のカード位置情報生成方法を、コンピュータによって実行可能なプログラムとして実施することを特徴とする。
【発明の効果】
【0011】
本発明によれば、カード搬送路に入り込んだレシート等の異物の影響を受け難く、透明領域のあるカードの正しい位置情報も生成でき、しかもカード搬送路の片側にカード位置検出センサの部品を集約できるカードリーダ/ライタ、並びにこのようなカードリーダ/ライタに適用できるカード位置情報生成方法およびカード位置情報生成プログラムを提供できる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施の形態であるカードリーダ/ライタの主要構成の概要を示す概念図である。
【図2】図1の実施形態におけるカードの搬送方向位置と変位センサ出力との関係を示す図である。
【図3】特許文献1(特開2009−31890公報)に開示された情報記録媒体処理装置用カードリーダ100の主要構成の概要を示す概念図である。
【発明を実施するための形態】
【0013】
以下、本発明によるカードリーダ/ライタ及びカード位置情報生成方法の好適な実施形態について添付図を参照して説明する。なお、以下の説明においては、本発明によるカードリーダ/ライタ及びカード位置情報生成方法について主に説明するが、かかる方法をコンピュータにより実行可能なカード位置情報生成プログラムとして実施するようにしても良いし、あるいはカード位置情報生成プログラムをコンピュータにより読み取り可能な記録媒体に記録するようにしても良いことは言うまでもない。
【0014】
本実施の形態のカードリーダ/ライタは、磁気カードやICカードといった情報記録カードに対し情報の読取りまたは書込みのうちの少なくとも一方を行う装置である。すなわち、本実施の形態のカードリーダ/ライタは、情報記録カードに記録された情報の読取りのみ装置、情報記録カードに対する情報の書き込みのみを行うカードライタ記録された読取りのみ装置、並びに情報記録カードに記録された情報の読取りおよび情報記録カードに対する情報の書き込みを行う装置の何れとしても実現可能である。
【0015】
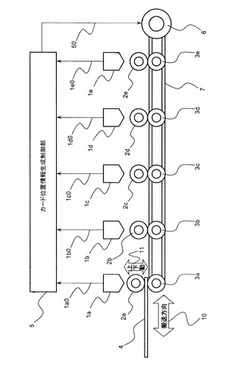
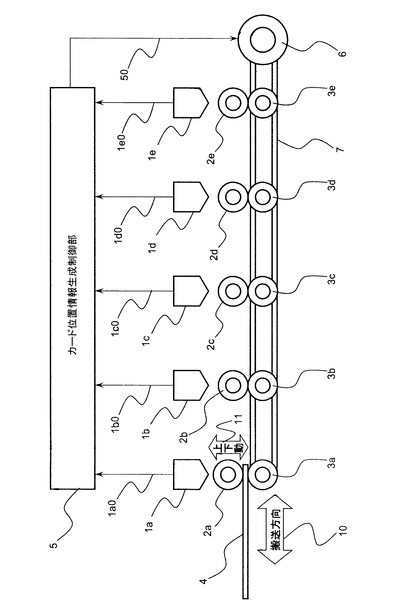
図1は、本発明の一実施の形態であるカードリーダ/ライタの主要構成の概要を示す概念図であり、カードの搬送方向の横からカードリーダ/ライタを見た側面図である。図2は、図1の実施形態におけるカードの搬送方向位置と変位センサ出力との関係を示す図である。図において、1a,1b,・・・1eは変位センサ、1a0,1b0,・・・1e0はそれぞれ変位センサ1a,1b,・・・1eの出力、2a,2b,・・・2eは従動ローラ、3a,3b,・・・3eは駆動ローラ、4は磁気カード、5はカード位置情報生成制御部(前述のカード位置情報生成手段に相当。)、50はモータ制御信号、6はモータ、7はベルトをそれぞれ示す。カード位置情報生成制御部5は、CPU、メモリおよび入出力インターフェースでなる。以下、本実施の形態では、扱う情報記録カードが磁気カード4である場合を説明するが、本実施の形態で扱う情報記録カードは、磁気カード4に限られず、例えばICカードでも差し支えないことは勿論である。
【0016】
磁気カード4を搬送する駆動系は、モータ6と、駆動ベルト7と、複数の対からなる駆動ローラ3a,3b,・・・3eと、従動ローラ2a,2b,・・・2eにて構成される。磁気カード4は、駆動ローラ3a,3b,・・・3eと従動ローラ2a,2b,・・・2eとの間に挟まれて、駆動ローラ3a,3b,・・・3eの回転による力を受けて、図の左側から右側に、または右側から左側に向かって搬送される。磁気カード4の搬送方向10は、モータ制御信号50によりモータ6の回転方向を制御することにより、図の左右どちら向きにも任意に制御できる。
【0017】
磁気カード4を搬送する駆動系についてより詳しく説明する。モータ6の回転が駆動ベルト7を介して駆動ローラ3a,3b,・・・3eに伝達され、駆動ローラ3a,3b,・・・3eが回転する。駆動ローラ3aと従動ローラ2aとは、回転軸を互いに平行にして、向かい合って配置されており、対を成す。また、従動ローラ2aの軸は、駆動ローラ3aの軸との平行を保持したまま、駆動ローラ3aの軸との距離が可変であるように支えられていて、駆動ローラ3aの軸の方向に向かう力で付勢され、従動ローラ2aは駆動ローラ3aに押し付けられている。従動ローラ2aの軸に対し駆動ローラ3aの軸の方向に向かわせる力、即ち付勢力は、本カードリーダ/ライタの筐体を支点として、従動ローラ2aの軸を駆動ローラ3aの軸の方向に押し、または引っ張るバネにより与えられる。従動ローラ2aと駆動ローラ3aとの間に磁気カード4が挟まれていないときは、従動ローラ2aと駆動ローラ3aとの間には摩擦があるから、駆動ローラ3aが回転するとき、従動ローラ2aは駆動ローラ3aから回転力を受けて回転する。
【0018】
同様に、駆動ローラ3b,3c,3d及び3eは、それぞれ従動ローラ2b,2c,2d及び2eと対を成し、磁気カード4が間に挟まれていないとき、従動ローラ2b,2c,2d及び2eは駆動ローラ3b,3c,3d及び3eからそれぞれ回転力を受けて回転する。
【0019】
いま、図1および図2に示すように、磁気カード4が駆動ローラ3aと従動ローラ2aとの間に挿入されたとする。すると、磁気カード4は、駆動ローラ3aの回転による力を受け、図の右方向に搬送され、搬送方向の端(前端)側から次の駆動ローラ3bと従動ローラ2bとの間に挟まれ、一層右方向に搬送され、更に駆動ローラ3cと従動ローラ2cとの間、駆動ローラ3dと従動ローラ2dとの間、駆動ローラ3eと従動ローラ2eとの間に順次挟まれ、右方向に搬送される。従動ローラ2a,2b,・・・2eは、対を成す駆動ローラ3a,3b,・・・3eとの間に磁気カード4がそれぞれ挟まれているか否かに応じて、矢印11方向に上下に動く。モータ6の回転方向を反転し、ベルト7の回転方向を逆転することにより、駆動ローラ3eと従動ローラ2eとの間に挟まれている磁気カード4を左方向に搬送し、左端の駆動ローラ3aと従動ローラ2aとの間から、磁気カード4を左方向に送り出すこともできる。
【0020】
駆動ローラ3aと従動ローラ2aとの間に磁気カード4が挟まれると、磁気カード4の厚み分だけ従動ローラ2aは図の上方に変位する。変位センサ1aはその変位を検出し、変位センサ出力1a0のレベルを生成する。同様に、駆動ローラ3b,3c,3d及び3eと、対応する従動ローラ2b,2c,2d及び2eとの間に磁気カード4が挟まれたときは、変位センサ1b,1c,1d及び1eは従動ローラ2b,2c,2d及び2eの変位を検知し、変位センサ出力1b0,1c0,1d0及び1e0をそれぞれ生成する。変位センサ1a,1b,・・・1eとしては、良く知られた光学式や磁気式などを用いることができる。
【0021】
駆動ローラ3a,3b,・・・3eと従動ローラ2a,2b,・・・2eとの間に磁気カード4が間に挟まれていないとき、変位センサ出力1a0,1b0,・・・1e0のレベルは第1の閾値h1以下である。第1の閾値h1は、従動ローラ2a,2b,・・・2eが駆動ローラ3a,3b,・・・3eに接触している状態における変位センサ出力1a0,1b0,・・・1e0のレベルの最大値に対応する。駆動ローラ3a,3b,・・・3eと従動ローラ2a,2b,・・・2eとの間に磁気カード4が間に挟まれているとき、変位センサ出力1a0,1b0,・・・1e0のレベルは第2の閾値h2以上で、かつ第3の閾値h3以下である。第2の閾値h2および第3の閾値h3は、磁気カー4ドの規格における許容最小値および許容最大値にそれぞれ対応する。
【0022】
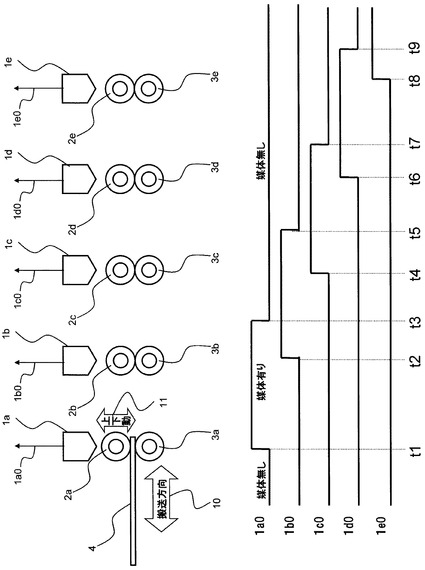
図2は、上述のように駆動ローラ3a,3b,・・・3eと従動ローラ2a,2b,・・・2eとの間に順次に磁気カード4が挟まれ、図の左端から右端に向かって磁気カード4が搬送されるときおける変位センサ1a,1b,・・・1eの出力1a0,1b0,・・・1e0を示す図である。変位センサ1aの出力1a0は、時刻t1−t2の間には磁気カード4(媒体)が駆動ローラ3aと従動ローラ2aとの間に存在することを表している。出力1a0の立ち上がりは、磁気カード4の搬送方向の前端が駆動ローラ3aと従動ローラ2aとの間に挟まれた時を表し、出力1a0の立ち下がりは、磁気カード4の搬送方向の後端が駆動ローラ3aと従動ローラ2aとの間から離れた時を表している。同様に、変位センサ出力1b0,1c0,1d0及び1e0の立ち上がり及び立ち下がりは、駆動ローラ3b,3c,3d及び3eと、対をなす従動ローラ2b,2c,2d及び2e夫々との間に磁気カード4が挟まれた時およびその間から離脱した時をそれぞれ表している。
【0023】
変位センサ出力1a0,1b0,・・・1e0の振幅は、駆動ローラ3a,3b,・・・3eと従動ローラ2a,2b,・・・2eとの間に挟まれた物体の厚みに対応している。そして、カード位置情報生成制御部5に第1の閾値h1、第2の閾値h2および第3の閾値h3を設定しておく。カード位置情報生成制御部5は、変位センサ出力1a0,1b0,・・・1e0の振幅が第1の閾値h1より小さいときは、従動ローラ2a,2b,・・・2eが駆動ローラ3a,3b,・・・3eに接触している状態、即ち対をなす駆動ローラおよび従動ローラの間に何も挟まれていないと判定する。また、カード位置情報生成制御部5は、変位センサ出力1a0,1b0,・・・1e0の振幅が、第1の閾値h1を越えて、第2の閾値h2以上であって、かつ第3の閾値h3以下のレベルに至ったときは、従動ローラ2a,2b,・・・2eと、駆動ローラ3a,3b,・・・3e夫々との間に、即ち対をなす駆動ローラおよび従動ローラの間に、磁気カード4が挟まれていると判定する。
【0024】
他方、カード位置情報生成制御部5は、変位センサ出力1a0,1b0,・・・1e0の振幅が、第1の閾値h1と第2の閾値h2との間の値である時間が、第1の所定時間を越えたて継続したとき、対をなす駆動ローラおよび従動ローラの間に異物が挟まれたと判定し、異常の警告を発生する。また、カード位置情報生成制御部5は、変位センサ出力1a0,1b0,・・・1e0の振幅が、第3の閾値h3を越えたときも、対をなす駆動ローラおよび従動ローラの間に異物が挟まれたと判定し、異常の警告を発生する。
【0025】
例えば、異物がレシートであれば、レシートの厚みは磁気カード4の厚みより薄いので、実施の形態のカードリーダ/ライタにおけるカード位置情報生成制御部5は、変位センサ出力1a0,1b0,・・・1e0の振幅に対応する検出物の厚みが第2の閾値h2と第3の閾値h3の間にないと判定し、カード位置情報生成制御部5の出力のモータ制御信号50により、検出された物体をカード挿入口側から排出する方向にモータ6を回転させ、異物(レシート)をカード挿入口側から外へ排出することができる。
【0026】
カード位置情報生成制御部5は、変位センサ出力1a0,1b0,1c0,1d0及び1e0を受けて、変位センサ出力1a0,1b0,1c0,1d0及び1e0から判定される検出物の厚みが第2の閾値h2と第3の閾値h3との間にあるときは、検出物を磁気カード4と判定し、搬送方向における磁気カード4の位置の情報を生成し、この情報に基づき、モータ制御信号50を生成し、モータ6の回転を制御するとともに、磁気カード4に記録されている情報の読取りまたは磁気カード4への情報の書込みをする。
【0027】
図1及び図2を参照して説明した実施の形態では、磁気カード4の搬送方向における位置を変位センサ1a,1b,・・・1eで検出する。図3に示したカードリーダ100では、磁気カード4の搬送方向における位置を光学式位置検知センサで検出しているので、前述のように、カード搬送路に入り込んだレシート、塵の塊などの異物の影響を受け易く、透明領域のあるカードについては正しい位置情報を生成できず、しかもカード搬送路の両側にカード位置検出センサの部品を配置せざるを得ないという解決するべき課題があったが、本実施の形態ではこれらの課題が全て解決される。
【0028】
即ち、本実施の形態によれば、磁気カード4にレシート等の異物が付着したり、カードリーダライタ内に溜まった塵の塊がカード搬送路に入り込んだりしても、それらの異物の影響を受けることなく変位センサ1a,1b,・・・1eにより磁気カード4が駆動ローラおよび従動ローラの間に挟まれた時およびその間から離脱した時を正確に検出できるので、カード位置情報生成制御部5は磁気カード4の位置に関する正しい情報を生成することができる。
【0029】
また、本実施の形態では、カード位置検出センサとしての変位センサ1a,1b,・・・1eは、磁気カード4の有無を直接検知するのではなく、磁気カード4が駆動ローラ3a,3b,・・・3eと従動ローラ2a,2b,・・・2eとの間に挟まれることによる従動ローラ2a,2b,・・・2eの変位を検出する。そこで、カード位置検出センサ(変位センサ1a,1b,・・・1e)は、埃などの異物が溜まり易いカードの搬送路ではなく、搬送路から離れた位置に配置できる。このように、本実施の形態の採用により、このカード位置検出センサをカードの搬送路から離隔して設置できるので、カード位置の検出において異物の影響を受け難くいという効果が得られる。
【0030】
また、本実施の形態によれば、磁気カード4の搬送方向における位置を変位センサ1a,1b,・・・1eで検出し、磁気カード4の不透明性を磁気カード4の位置検出の要件としていないので、透明領域のあるカードでも、そのカードの正しい位置情報も生成できる。
【0031】
更に、本実施の形態によれば、変位センサ1a,1b,・・・1eは、図1および図2に示すように、カード搬送路の片側にカード位置検出センサの部品を集約できるので、部品を一体的に構成でき、カード位置検出センサ自体の製造費およびカードリーダ/ライタの組み立て費用の低廉化を可能にする。
【0032】
本実施の形態において、変位センサ1a,1b,・・・1eとして、位置検出精度に優れたものを使用すると、変位センサ出力1a0,1b0,1c0,1d0及び1e0に基づき、磁気カード4の変形、割れ、欠損などを推測できるので、磁気カード4の読取り、書込みにおいてエラーが生じたときに、カードリーダ/ライタの使用者に対し、磁気カード4における異常の種類や異常の可能性を案内することが可能である。
【0033】
本実施の形態では、カード位置検出センサとしての変位センサ1a,1b,・・・1eは、駆動ローラ3a,3b,・・・3eと従動ローラ2a,2b,・・・2eとの間に挟まれた物体の厚みを表す変位センサ出力1a0,1b0,1c0,1d0及び1e0を生成するので、第1の閾値h1、第2の閾値h2及び、第3の閾値h3を予めカード位置情報生成制御部5に設定しておき、変位センサ出力1a0,1b0,1c0,1d0及び1e0と閾値h1,h2及びh3とを比較することにより、対を成す駆動ローラと従動ローラとの間に挟まれた物体が磁気カード以外のもの、即ち異物であると判定でき、異物と判定したときは、カード位置情報生成制御部5の出力のモータ制御信号50により、モータ6を逆転させて、異物を排出することができる。
【0034】
本発明のカードリーダ/ライタは、磁気カードやICカードといった情報記録カードに対し情報の読取りまたは書込みのうちの少なくとも一方を行う装置である。すなわち、本発明のカードリーダ/ライタは、情報記録カードに記録された情報の読取りのみ装置、情報記録カードに対する情報の書き込みのみを行うカードライタ記録された読取りのみ装置、並びに情報記録カードに記録された情報の読取りおよび情報記録カードに対する情報の書き込みを行う装置の何れにも適用可能である。
【0035】
以上、本発明の好適な実施形態の構成を説明した。しかし、かかる実施形態は、本発明の単なる例示に過ぎず、何ら本発明を限定するものではないことに留意されたい。本発明の要旨を逸脱することなく、特定用途に応じて種々の変形変更が可能であることが、当業者には容易に理解できよう。例えば、変位センサ出力1a0,1b0,1c0,1d0及び1e0が第1の閾値h1を越える時間の長さに基づき、対をなる駆動ローラおよび従動ローラの間に挟まれた物体の種類を推定し、その種類に応じて、カードリーダ/ライタの使用者に適切な案内をするように、カード位置情報生成制御部のプログラムを設計することも可能である。
【符号の説明】
【0036】
1a,1b,・・・1e 変位センサ
1a0,1b0,・・・1e0 変位センサ出力
2a,2b,・・・2e 従動ローラ
3a,3b,・・・3e 駆動ローラ
4 磁気カード
5 カード位置情報生成制御部
50 モータ制御信号
6 モータ
7 ベルト
【技術分野】
【0001】
本発明は、ATM(現金自動預け払い機)や、POS(販売時点情報管理)システム等において、磁気カードやICカードといった情報記録カードに対し情報の読取りまたは書込みのうちの少なくとも一方を行うカードリーダ/ライタ、並びにそのカードリーダ/ライタに適用するカード位置情報生成方法およびカード位置情報生成プログラムに関する。
【背景技術】
【0002】
図3は、特許文献1(特開2009−31890公報)に開示された情報記録媒体処理装置用カードリーダ100の主要構成の概要を示す概念図である。この特許文献1の図1および明細書の段落0033,0034,0036等に記載されているように、カードリーダ100は、磁気カード又はICカードの取り込み口となるカード挿入口11、外の粉塵や異物が入り込むのを防ぐシャッター13、このシャッター13を変位駆動するソレノイド12、挿入されたカードを搬送する搬送手段、この搬送手段を駆動する駆動モータ14、センサ1〜5などを有してなる。その搬送手段は、第1の一対のローラ15,16,第2の一対のローラ19,20及び第3の一対のローラ23,24でなる。ローラ15,19及び23は駆動ローラである。ローラ16,20及び24は従動ローラであり、駆動ローラ15,19及び23によりそれぞれ駆動される。
【0003】
センサ1〜5は、カードリーダ100内に挿入されたカードの端部を検知する光学式位置検知センサであり、発光素子(フォトダイオード)と受光素子(フォトセンサ)を、搬送路を挟むように配置してなる。センサ1〜5の出力は、発光素子と受光素子との間の光路がカードによって遮られた時に変化する。そこで、センサ1〜5の出力の変化により、カードの端部が発光素子と受光素子との間の光路を通過したことを把握することができる。カードリーダ100は、センサ1〜5の信号出力に基づいて、搬送方向におけるカードの位置を検出する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−31890号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述のとおり、特許文献1に記載されたカードリーダ100は、センサ1〜5でなる光学式位置検知センサにより、カードの端が光路を通過した時を表す信号を基にカードの位置情報を生成するカード位置情報生成方法を採用している。ところが、このような光学式位置検知センサによるカード位置情報生成方法では、センサにおける発光素子と受光素子との間の光路に何らかの光遮断物が入り込むと、それがカードではなくても、カードと誤認し、誤ったカード位置情報を生成してしまう。カード以外の光遮断物、即ち異物としては、カードに付着してカードリーダ100のカード挿入口11から入り込むレシート(受領書)、糸くず、カードリーダ/ライタの中に溜まった塵の塊などがある。カードリーダ/ライタにおけるカード搬送路付近に溜まった塵の塊が、挿入されたカードに付着することがある。カードリーダ/ライタ中の光路近傍の部材に溜まった塵の塊が光路を遮ることもある。
【0006】
また、カードに透明な領域があると、光学式位置検知センサは、カードの端だけでなく、カードにおける透明領域と不透明領域との境界も検出するので、不透明カードを対象とする図3のカードリーダ100では、カードの正しい位置を検出することができない。
【0007】
さらに、図3の光学式位置検知センサでは、発光素子と受光素子とが、カードの搬送路を挟んでそれぞれの側に配置されるので、部品を一箇所に集約することができず、構成が複雑になり、カードリーダ100全体の製造費低減を難しくする。
【0008】
そこで、本発明は、かかる課題を解決するために、カード搬送路に入り込んだレシート等の異物の影響を受け難く、透明領域のあるカードの正しい位置情報も生成でき、しかもカード搬送路の片側にカード位置検出センサの部品を集約できるカードリーダ/ライタ、並びにこのようなカードリーダ/ライタに適用できるカード位置情報生成方法およびカード位置情報生成プログラムの提供を目的とする。
【課題を解決するための手段】
【0009】
前述の課題を解決するため、本発明によるカードリーダ/ライタ、カード位置情報生成方法およびカード位置情報生成プログラムは、主に、次のような特徴的な構成を採用している。
【0010】
(1)本発明によるカードリーダ/ライタは、位置が固定されている第1の軸を回転中心とする駆動ローラと、該第1の軸に平行であって該第1の軸との距離が可変である第2の軸を回転中心とする従動ローラとを有し、該従動ローラを該駆動ローラに向けて押し付けようとする付勢力が該第2の軸に加えられており、該駆動ローラと該従動ローラとの間に情報記録カードを挟み、該駆動ローラの回転により該情報記録カードの搬送をする情報記録カード搬送手段と、
前記第1の軸に対する前記第2の軸の変位を検出する変位センサと、
前記変位センサで検出した前記変位に基づき、前記搬送の方向における前記情報記録カードの位置の情報を生成するカード位置情報生成手段と
を有する。
(2)本発明によるカード位置情報生成方法は、位置が固定されている第1の軸を回転中心とする駆動ローラと、該第1の軸に平行であって該第1の軸との距離が可変である第2の軸を回転中心とし、該従動ローラを該駆動ローラに向けて押し付けるように該第2の軸を付勢し、該駆動ローラと該従動ローラとの間に情報記録カードを挟み、該駆動ローラの回転により該情報記録カードの搬送をし、
前記第1の軸に対する前記第2の軸の変位を検出し、
前記変位に基づき、前記搬送の方向における前記情報記録カードの位置の情報を生成する。
(3)また、本発明によるカード位置情報生成プログラムは、上記(2)に記載のカード位置情報生成方法を、コンピュータによって実行可能なプログラムとして実施することを特徴とする。
【発明の効果】
【0011】
本発明によれば、カード搬送路に入り込んだレシート等の異物の影響を受け難く、透明領域のあるカードの正しい位置情報も生成でき、しかもカード搬送路の片側にカード位置検出センサの部品を集約できるカードリーダ/ライタ、並びにこのようなカードリーダ/ライタに適用できるカード位置情報生成方法およびカード位置情報生成プログラムを提供できる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施の形態であるカードリーダ/ライタの主要構成の概要を示す概念図である。
【図2】図1の実施形態におけるカードの搬送方向位置と変位センサ出力との関係を示す図である。
【図3】特許文献1(特開2009−31890公報)に開示された情報記録媒体処理装置用カードリーダ100の主要構成の概要を示す概念図である。
【発明を実施するための形態】
【0013】
以下、本発明によるカードリーダ/ライタ及びカード位置情報生成方法の好適な実施形態について添付図を参照して説明する。なお、以下の説明においては、本発明によるカードリーダ/ライタ及びカード位置情報生成方法について主に説明するが、かかる方法をコンピュータにより実行可能なカード位置情報生成プログラムとして実施するようにしても良いし、あるいはカード位置情報生成プログラムをコンピュータにより読み取り可能な記録媒体に記録するようにしても良いことは言うまでもない。
【0014】
本実施の形態のカードリーダ/ライタは、磁気カードやICカードといった情報記録カードに対し情報の読取りまたは書込みのうちの少なくとも一方を行う装置である。すなわち、本実施の形態のカードリーダ/ライタは、情報記録カードに記録された情報の読取りのみ装置、情報記録カードに対する情報の書き込みのみを行うカードライタ記録された読取りのみ装置、並びに情報記録カードに記録された情報の読取りおよび情報記録カードに対する情報の書き込みを行う装置の何れとしても実現可能である。
【0015】
図1は、本発明の一実施の形態であるカードリーダ/ライタの主要構成の概要を示す概念図であり、カードの搬送方向の横からカードリーダ/ライタを見た側面図である。図2は、図1の実施形態におけるカードの搬送方向位置と変位センサ出力との関係を示す図である。図において、1a,1b,・・・1eは変位センサ、1a0,1b0,・・・1e0はそれぞれ変位センサ1a,1b,・・・1eの出力、2a,2b,・・・2eは従動ローラ、3a,3b,・・・3eは駆動ローラ、4は磁気カード、5はカード位置情報生成制御部(前述のカード位置情報生成手段に相当。)、50はモータ制御信号、6はモータ、7はベルトをそれぞれ示す。カード位置情報生成制御部5は、CPU、メモリおよび入出力インターフェースでなる。以下、本実施の形態では、扱う情報記録カードが磁気カード4である場合を説明するが、本実施の形態で扱う情報記録カードは、磁気カード4に限られず、例えばICカードでも差し支えないことは勿論である。
【0016】
磁気カード4を搬送する駆動系は、モータ6と、駆動ベルト7と、複数の対からなる駆動ローラ3a,3b,・・・3eと、従動ローラ2a,2b,・・・2eにて構成される。磁気カード4は、駆動ローラ3a,3b,・・・3eと従動ローラ2a,2b,・・・2eとの間に挟まれて、駆動ローラ3a,3b,・・・3eの回転による力を受けて、図の左側から右側に、または右側から左側に向かって搬送される。磁気カード4の搬送方向10は、モータ制御信号50によりモータ6の回転方向を制御することにより、図の左右どちら向きにも任意に制御できる。
【0017】
磁気カード4を搬送する駆動系についてより詳しく説明する。モータ6の回転が駆動ベルト7を介して駆動ローラ3a,3b,・・・3eに伝達され、駆動ローラ3a,3b,・・・3eが回転する。駆動ローラ3aと従動ローラ2aとは、回転軸を互いに平行にして、向かい合って配置されており、対を成す。また、従動ローラ2aの軸は、駆動ローラ3aの軸との平行を保持したまま、駆動ローラ3aの軸との距離が可変であるように支えられていて、駆動ローラ3aの軸の方向に向かう力で付勢され、従動ローラ2aは駆動ローラ3aに押し付けられている。従動ローラ2aの軸に対し駆動ローラ3aの軸の方向に向かわせる力、即ち付勢力は、本カードリーダ/ライタの筐体を支点として、従動ローラ2aの軸を駆動ローラ3aの軸の方向に押し、または引っ張るバネにより与えられる。従動ローラ2aと駆動ローラ3aとの間に磁気カード4が挟まれていないときは、従動ローラ2aと駆動ローラ3aとの間には摩擦があるから、駆動ローラ3aが回転するとき、従動ローラ2aは駆動ローラ3aから回転力を受けて回転する。
【0018】
同様に、駆動ローラ3b,3c,3d及び3eは、それぞれ従動ローラ2b,2c,2d及び2eと対を成し、磁気カード4が間に挟まれていないとき、従動ローラ2b,2c,2d及び2eは駆動ローラ3b,3c,3d及び3eからそれぞれ回転力を受けて回転する。
【0019】
いま、図1および図2に示すように、磁気カード4が駆動ローラ3aと従動ローラ2aとの間に挿入されたとする。すると、磁気カード4は、駆動ローラ3aの回転による力を受け、図の右方向に搬送され、搬送方向の端(前端)側から次の駆動ローラ3bと従動ローラ2bとの間に挟まれ、一層右方向に搬送され、更に駆動ローラ3cと従動ローラ2cとの間、駆動ローラ3dと従動ローラ2dとの間、駆動ローラ3eと従動ローラ2eとの間に順次挟まれ、右方向に搬送される。従動ローラ2a,2b,・・・2eは、対を成す駆動ローラ3a,3b,・・・3eとの間に磁気カード4がそれぞれ挟まれているか否かに応じて、矢印11方向に上下に動く。モータ6の回転方向を反転し、ベルト7の回転方向を逆転することにより、駆動ローラ3eと従動ローラ2eとの間に挟まれている磁気カード4を左方向に搬送し、左端の駆動ローラ3aと従動ローラ2aとの間から、磁気カード4を左方向に送り出すこともできる。
【0020】
駆動ローラ3aと従動ローラ2aとの間に磁気カード4が挟まれると、磁気カード4の厚み分だけ従動ローラ2aは図の上方に変位する。変位センサ1aはその変位を検出し、変位センサ出力1a0のレベルを生成する。同様に、駆動ローラ3b,3c,3d及び3eと、対応する従動ローラ2b,2c,2d及び2eとの間に磁気カード4が挟まれたときは、変位センサ1b,1c,1d及び1eは従動ローラ2b,2c,2d及び2eの変位を検知し、変位センサ出力1b0,1c0,1d0及び1e0をそれぞれ生成する。変位センサ1a,1b,・・・1eとしては、良く知られた光学式や磁気式などを用いることができる。
【0021】
駆動ローラ3a,3b,・・・3eと従動ローラ2a,2b,・・・2eとの間に磁気カード4が間に挟まれていないとき、変位センサ出力1a0,1b0,・・・1e0のレベルは第1の閾値h1以下である。第1の閾値h1は、従動ローラ2a,2b,・・・2eが駆動ローラ3a,3b,・・・3eに接触している状態における変位センサ出力1a0,1b0,・・・1e0のレベルの最大値に対応する。駆動ローラ3a,3b,・・・3eと従動ローラ2a,2b,・・・2eとの間に磁気カード4が間に挟まれているとき、変位センサ出力1a0,1b0,・・・1e0のレベルは第2の閾値h2以上で、かつ第3の閾値h3以下である。第2の閾値h2および第3の閾値h3は、磁気カー4ドの規格における許容最小値および許容最大値にそれぞれ対応する。
【0022】
図2は、上述のように駆動ローラ3a,3b,・・・3eと従動ローラ2a,2b,・・・2eとの間に順次に磁気カード4が挟まれ、図の左端から右端に向かって磁気カード4が搬送されるときおける変位センサ1a,1b,・・・1eの出力1a0,1b0,・・・1e0を示す図である。変位センサ1aの出力1a0は、時刻t1−t2の間には磁気カード4(媒体)が駆動ローラ3aと従動ローラ2aとの間に存在することを表している。出力1a0の立ち上がりは、磁気カード4の搬送方向の前端が駆動ローラ3aと従動ローラ2aとの間に挟まれた時を表し、出力1a0の立ち下がりは、磁気カード4の搬送方向の後端が駆動ローラ3aと従動ローラ2aとの間から離れた時を表している。同様に、変位センサ出力1b0,1c0,1d0及び1e0の立ち上がり及び立ち下がりは、駆動ローラ3b,3c,3d及び3eと、対をなす従動ローラ2b,2c,2d及び2e夫々との間に磁気カード4が挟まれた時およびその間から離脱した時をそれぞれ表している。
【0023】
変位センサ出力1a0,1b0,・・・1e0の振幅は、駆動ローラ3a,3b,・・・3eと従動ローラ2a,2b,・・・2eとの間に挟まれた物体の厚みに対応している。そして、カード位置情報生成制御部5に第1の閾値h1、第2の閾値h2および第3の閾値h3を設定しておく。カード位置情報生成制御部5は、変位センサ出力1a0,1b0,・・・1e0の振幅が第1の閾値h1より小さいときは、従動ローラ2a,2b,・・・2eが駆動ローラ3a,3b,・・・3eに接触している状態、即ち対をなす駆動ローラおよび従動ローラの間に何も挟まれていないと判定する。また、カード位置情報生成制御部5は、変位センサ出力1a0,1b0,・・・1e0の振幅が、第1の閾値h1を越えて、第2の閾値h2以上であって、かつ第3の閾値h3以下のレベルに至ったときは、従動ローラ2a,2b,・・・2eと、駆動ローラ3a,3b,・・・3e夫々との間に、即ち対をなす駆動ローラおよび従動ローラの間に、磁気カード4が挟まれていると判定する。
【0024】
他方、カード位置情報生成制御部5は、変位センサ出力1a0,1b0,・・・1e0の振幅が、第1の閾値h1と第2の閾値h2との間の値である時間が、第1の所定時間を越えたて継続したとき、対をなす駆動ローラおよび従動ローラの間に異物が挟まれたと判定し、異常の警告を発生する。また、カード位置情報生成制御部5は、変位センサ出力1a0,1b0,・・・1e0の振幅が、第3の閾値h3を越えたときも、対をなす駆動ローラおよび従動ローラの間に異物が挟まれたと判定し、異常の警告を発生する。
【0025】
例えば、異物がレシートであれば、レシートの厚みは磁気カード4の厚みより薄いので、実施の形態のカードリーダ/ライタにおけるカード位置情報生成制御部5は、変位センサ出力1a0,1b0,・・・1e0の振幅に対応する検出物の厚みが第2の閾値h2と第3の閾値h3の間にないと判定し、カード位置情報生成制御部5の出力のモータ制御信号50により、検出された物体をカード挿入口側から排出する方向にモータ6を回転させ、異物(レシート)をカード挿入口側から外へ排出することができる。
【0026】
カード位置情報生成制御部5は、変位センサ出力1a0,1b0,1c0,1d0及び1e0を受けて、変位センサ出力1a0,1b0,1c0,1d0及び1e0から判定される検出物の厚みが第2の閾値h2と第3の閾値h3との間にあるときは、検出物を磁気カード4と判定し、搬送方向における磁気カード4の位置の情報を生成し、この情報に基づき、モータ制御信号50を生成し、モータ6の回転を制御するとともに、磁気カード4に記録されている情報の読取りまたは磁気カード4への情報の書込みをする。
【0027】
図1及び図2を参照して説明した実施の形態では、磁気カード4の搬送方向における位置を変位センサ1a,1b,・・・1eで検出する。図3に示したカードリーダ100では、磁気カード4の搬送方向における位置を光学式位置検知センサで検出しているので、前述のように、カード搬送路に入り込んだレシート、塵の塊などの異物の影響を受け易く、透明領域のあるカードについては正しい位置情報を生成できず、しかもカード搬送路の両側にカード位置検出センサの部品を配置せざるを得ないという解決するべき課題があったが、本実施の形態ではこれらの課題が全て解決される。
【0028】
即ち、本実施の形態によれば、磁気カード4にレシート等の異物が付着したり、カードリーダライタ内に溜まった塵の塊がカード搬送路に入り込んだりしても、それらの異物の影響を受けることなく変位センサ1a,1b,・・・1eにより磁気カード4が駆動ローラおよび従動ローラの間に挟まれた時およびその間から離脱した時を正確に検出できるので、カード位置情報生成制御部5は磁気カード4の位置に関する正しい情報を生成することができる。
【0029】
また、本実施の形態では、カード位置検出センサとしての変位センサ1a,1b,・・・1eは、磁気カード4の有無を直接検知するのではなく、磁気カード4が駆動ローラ3a,3b,・・・3eと従動ローラ2a,2b,・・・2eとの間に挟まれることによる従動ローラ2a,2b,・・・2eの変位を検出する。そこで、カード位置検出センサ(変位センサ1a,1b,・・・1e)は、埃などの異物が溜まり易いカードの搬送路ではなく、搬送路から離れた位置に配置できる。このように、本実施の形態の採用により、このカード位置検出センサをカードの搬送路から離隔して設置できるので、カード位置の検出において異物の影響を受け難くいという効果が得られる。
【0030】
また、本実施の形態によれば、磁気カード4の搬送方向における位置を変位センサ1a,1b,・・・1eで検出し、磁気カード4の不透明性を磁気カード4の位置検出の要件としていないので、透明領域のあるカードでも、そのカードの正しい位置情報も生成できる。
【0031】
更に、本実施の形態によれば、変位センサ1a,1b,・・・1eは、図1および図2に示すように、カード搬送路の片側にカード位置検出センサの部品を集約できるので、部品を一体的に構成でき、カード位置検出センサ自体の製造費およびカードリーダ/ライタの組み立て費用の低廉化を可能にする。
【0032】
本実施の形態において、変位センサ1a,1b,・・・1eとして、位置検出精度に優れたものを使用すると、変位センサ出力1a0,1b0,1c0,1d0及び1e0に基づき、磁気カード4の変形、割れ、欠損などを推測できるので、磁気カード4の読取り、書込みにおいてエラーが生じたときに、カードリーダ/ライタの使用者に対し、磁気カード4における異常の種類や異常の可能性を案内することが可能である。
【0033】
本実施の形態では、カード位置検出センサとしての変位センサ1a,1b,・・・1eは、駆動ローラ3a,3b,・・・3eと従動ローラ2a,2b,・・・2eとの間に挟まれた物体の厚みを表す変位センサ出力1a0,1b0,1c0,1d0及び1e0を生成するので、第1の閾値h1、第2の閾値h2及び、第3の閾値h3を予めカード位置情報生成制御部5に設定しておき、変位センサ出力1a0,1b0,1c0,1d0及び1e0と閾値h1,h2及びh3とを比較することにより、対を成す駆動ローラと従動ローラとの間に挟まれた物体が磁気カード以外のもの、即ち異物であると判定でき、異物と判定したときは、カード位置情報生成制御部5の出力のモータ制御信号50により、モータ6を逆転させて、異物を排出することができる。
【0034】
本発明のカードリーダ/ライタは、磁気カードやICカードといった情報記録カードに対し情報の読取りまたは書込みのうちの少なくとも一方を行う装置である。すなわち、本発明のカードリーダ/ライタは、情報記録カードに記録された情報の読取りのみ装置、情報記録カードに対する情報の書き込みのみを行うカードライタ記録された読取りのみ装置、並びに情報記録カードに記録された情報の読取りおよび情報記録カードに対する情報の書き込みを行う装置の何れにも適用可能である。
【0035】
以上、本発明の好適な実施形態の構成を説明した。しかし、かかる実施形態は、本発明の単なる例示に過ぎず、何ら本発明を限定するものではないことに留意されたい。本発明の要旨を逸脱することなく、特定用途に応じて種々の変形変更が可能であることが、当業者には容易に理解できよう。例えば、変位センサ出力1a0,1b0,1c0,1d0及び1e0が第1の閾値h1を越える時間の長さに基づき、対をなる駆動ローラおよび従動ローラの間に挟まれた物体の種類を推定し、その種類に応じて、カードリーダ/ライタの使用者に適切な案内をするように、カード位置情報生成制御部のプログラムを設計することも可能である。
【符号の説明】
【0036】
1a,1b,・・・1e 変位センサ
1a0,1b0,・・・1e0 変位センサ出力
2a,2b,・・・2e 従動ローラ
3a,3b,・・・3e 駆動ローラ
4 磁気カード
5 カード位置情報生成制御部
50 モータ制御信号
6 モータ
7 ベルト
【特許請求の範囲】
【請求項1】
位置が固定されている第1の軸を回転中心とする駆動ローラと、該第1の軸に平行であって該第1の軸との距離が可変である第2の軸を回転中心とする従動ローラとを有し、該従動ローラを該駆動ローラに向けて押し付けようとする付勢力が該第2の軸に加えられており、該駆動ローラと該従動ローラとの間に情報記録カードを挟み、該駆動ローラの回転により該情報記録カードの搬送をする情報記録カード搬送手段と、
前記第1の軸に対する前記第2の軸の変位を検出する変位センサと、
前記変位センサで検出した前記変位に基づき、前記搬送の方向における前記情報記録カードの位置の情報を生成するカード位置情報生成手段と
を有するカードリーダ/ライタ。
【請求項2】
前記搬送の方向は前記第1および第2の軸を含む平面に直交し、
前記駆動ローラと前記従動ローラとの間に情報記録カードが挟まれていないときは、該駆動ローラと該従動ローラとは接触し、
前記変位が第1閾値以下から、第2の閾値以上で、かつ第3の閾値以下の値に上昇したとき、前記カード位置情報生成手段は、前記情報記録カードの前記搬送方向の端が前記駆動ローラと前記従動ローラとの間に位置すると判断し、
前記第1の閾値は、前記従動ローラが前記駆動ローラに接触している状態に対応し、
前記第2および第3の閾値は、前記情報記録カードの規格における許容最小値および許容最大値にそれぞれ対応する
ことを特徴とする請求項1に記載のカードリーダ/ライタ。
【請求項3】
前記駆動ローラとこの駆動ローラの回転力で回転する前記従動ローラとでなる一対のローラを1つの搬送ローラと称するとき、前記情報記録カード搬送手段は前記搬送の方向において複数の該搬送ローラを間隔を開けて配設してなり、
前記変位センサは、前記搬送ローラにおける各従動ローラに対応してそれぞれ設けてあり、
前記搬送の方向に間隔を開けて配設された各前記搬送ローラにおける前記駆動ローラと前記従動ローラとによる情報記録カード挟持面を連ねてなる包絡面をカード搬送面と称するとき、前記変位センサは、該カード搬送面に関し、一方の側にだけ設けてある
ことを特徴とする請求項1または2の何れか一方に記載のカードリーダ/ライタ。
【請求項4】
前記変位が第1の閾値と第2の閾値との間の値である時間が、所定時間を越えたとき、前記カード位置情報生成手段が異常の警告を発生することを特徴とする請求項2または3のうちの何れか一方に記載のカードリーダ/ライタ。
【請求項5】
前記変位が第3の閾値を越えたとき、前記カード位置情報生成手段が異常の警告を発生することを特徴とする請求項2ないし4のうちの何れかに記載のカードリーダ/ライタ。
【請求項6】
位置が固定されている第1の軸を回転中心とする駆動ローラと、該第1の軸に平行であって該第1の軸との距離が可変である第2の軸を回転中心とし、該従動ローラを該駆動ローラに向けて押し付けるように該第2の軸を付勢し、該駆動ローラと該従動ローラとの間に情報記録カードを挟み、該駆動ローラの回転により該情報記録カードの搬送をし、
前記第1の軸に対する前記第2の軸の変位を検出し、
前記変位に基づき、前記搬送の方向における前記情報記録カードの位置の情報を生成するカード位置情報生成方法。
【請求項7】
前記第1および第2の軸を含む平面に直交する方向を前記搬送の方向とし、
前記駆動ローラと前記従動ローラとの間に情報記録カードが挟まれていないときは、該駆動ローラと該従動ローラとを接触させ、
前記変位が第1閾値以下から、第2の閾値以上で、かつ第3の閾値以下の値に上昇したとき、前記情報記録カードの前記搬送方向の端が前記駆動ローラと前記従動ローラとの間に位置すると判断し、
前記第1の閾値は、前記従動ローラが前記駆動ローラに接触している状態に対応し、
前記第2および第3の閾値は、前記情報記録カードの規格における許容最小値および許容最大値にそれぞれ対応する
ことを特徴とする請求項6に記載のカード位置情報生成方法。
【請求項8】
前記駆動ローラとこの駆動ローラの回転力で回転する前記従動ローラとでなる一対のローラを1つの搬送ローラと称するとき、前記搬送の方向において複数の該搬送ローラを間隔を開けて配設し、
前記搬送ローラにおける各従動ローラに対応してそれぞれ前記変位センサを設け、
前記搬送の方向に間隔を開けて配設した各前記搬送ローラにおける前記駆動ローラと前記従動ローラとによる情報記録カード挟持面を連ねてなる包絡面をカード搬送面と称するとき、該カード搬送面に関し、一方の側にだけ前記変位センサを設ける
ことを特徴とする請求項6または7の何れか一方に記載のカード位置情報生成方法。
【請求項9】
前記変位が第1の閾値と第2の閾値との間の値である時間が、所定時間を越えたとき、異常の警告を発生することを特徴とする請求項7または8のうちの何れか一方に記載のカード位置情報生成方法。
【請求項10】
請求項6ないし9のうちの何れかに記載のカード位置情報生成方法を、コンピュータによって実行可能なプログラムとして実施することを特徴とするカード位置情報生成プログラム。
【請求項1】
位置が固定されている第1の軸を回転中心とする駆動ローラと、該第1の軸に平行であって該第1の軸との距離が可変である第2の軸を回転中心とする従動ローラとを有し、該従動ローラを該駆動ローラに向けて押し付けようとする付勢力が該第2の軸に加えられており、該駆動ローラと該従動ローラとの間に情報記録カードを挟み、該駆動ローラの回転により該情報記録カードの搬送をする情報記録カード搬送手段と、
前記第1の軸に対する前記第2の軸の変位を検出する変位センサと、
前記変位センサで検出した前記変位に基づき、前記搬送の方向における前記情報記録カードの位置の情報を生成するカード位置情報生成手段と
を有するカードリーダ/ライタ。
【請求項2】
前記搬送の方向は前記第1および第2の軸を含む平面に直交し、
前記駆動ローラと前記従動ローラとの間に情報記録カードが挟まれていないときは、該駆動ローラと該従動ローラとは接触し、
前記変位が第1閾値以下から、第2の閾値以上で、かつ第3の閾値以下の値に上昇したとき、前記カード位置情報生成手段は、前記情報記録カードの前記搬送方向の端が前記駆動ローラと前記従動ローラとの間に位置すると判断し、
前記第1の閾値は、前記従動ローラが前記駆動ローラに接触している状態に対応し、
前記第2および第3の閾値は、前記情報記録カードの規格における許容最小値および許容最大値にそれぞれ対応する
ことを特徴とする請求項1に記載のカードリーダ/ライタ。
【請求項3】
前記駆動ローラとこの駆動ローラの回転力で回転する前記従動ローラとでなる一対のローラを1つの搬送ローラと称するとき、前記情報記録カード搬送手段は前記搬送の方向において複数の該搬送ローラを間隔を開けて配設してなり、
前記変位センサは、前記搬送ローラにおける各従動ローラに対応してそれぞれ設けてあり、
前記搬送の方向に間隔を開けて配設された各前記搬送ローラにおける前記駆動ローラと前記従動ローラとによる情報記録カード挟持面を連ねてなる包絡面をカード搬送面と称するとき、前記変位センサは、該カード搬送面に関し、一方の側にだけ設けてある
ことを特徴とする請求項1または2の何れか一方に記載のカードリーダ/ライタ。
【請求項4】
前記変位が第1の閾値と第2の閾値との間の値である時間が、所定時間を越えたとき、前記カード位置情報生成手段が異常の警告を発生することを特徴とする請求項2または3のうちの何れか一方に記載のカードリーダ/ライタ。
【請求項5】
前記変位が第3の閾値を越えたとき、前記カード位置情報生成手段が異常の警告を発生することを特徴とする請求項2ないし4のうちの何れかに記載のカードリーダ/ライタ。
【請求項6】
位置が固定されている第1の軸を回転中心とする駆動ローラと、該第1の軸に平行であって該第1の軸との距離が可変である第2の軸を回転中心とし、該従動ローラを該駆動ローラに向けて押し付けるように該第2の軸を付勢し、該駆動ローラと該従動ローラとの間に情報記録カードを挟み、該駆動ローラの回転により該情報記録カードの搬送をし、
前記第1の軸に対する前記第2の軸の変位を検出し、
前記変位に基づき、前記搬送の方向における前記情報記録カードの位置の情報を生成するカード位置情報生成方法。
【請求項7】
前記第1および第2の軸を含む平面に直交する方向を前記搬送の方向とし、
前記駆動ローラと前記従動ローラとの間に情報記録カードが挟まれていないときは、該駆動ローラと該従動ローラとを接触させ、
前記変位が第1閾値以下から、第2の閾値以上で、かつ第3の閾値以下の値に上昇したとき、前記情報記録カードの前記搬送方向の端が前記駆動ローラと前記従動ローラとの間に位置すると判断し、
前記第1の閾値は、前記従動ローラが前記駆動ローラに接触している状態に対応し、
前記第2および第3の閾値は、前記情報記録カードの規格における許容最小値および許容最大値にそれぞれ対応する
ことを特徴とする請求項6に記載のカード位置情報生成方法。
【請求項8】
前記駆動ローラとこの駆動ローラの回転力で回転する前記従動ローラとでなる一対のローラを1つの搬送ローラと称するとき、前記搬送の方向において複数の該搬送ローラを間隔を開けて配設し、
前記搬送ローラにおける各従動ローラに対応してそれぞれ前記変位センサを設け、
前記搬送の方向に間隔を開けて配設した各前記搬送ローラにおける前記駆動ローラと前記従動ローラとによる情報記録カード挟持面を連ねてなる包絡面をカード搬送面と称するとき、該カード搬送面に関し、一方の側にだけ前記変位センサを設ける
ことを特徴とする請求項6または7の何れか一方に記載のカード位置情報生成方法。
【請求項9】
前記変位が第1の閾値と第2の閾値との間の値である時間が、所定時間を越えたとき、異常の警告を発生することを特徴とする請求項7または8のうちの何れか一方に記載のカード位置情報生成方法。
【請求項10】
請求項6ないし9のうちの何れかに記載のカード位置情報生成方法を、コンピュータによって実行可能なプログラムとして実施することを特徴とするカード位置情報生成プログラム。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2012−185768(P2012−185768A)
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願番号】特願2011−50009(P2011−50009)
【出願日】平成23年3月8日(2011.3.8)
【出願人】(000168285)エヌイーシーコンピュータテクノ株式会社 (572)
【Fターム(参考)】
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願日】平成23年3月8日(2011.3.8)
【出願人】(000168285)エヌイーシーコンピュータテクノ株式会社 (572)
【Fターム(参考)】
[ Back to top ]