
カード印刷装置及びカード印刷収納装置
【課題】カードに記録されて読み出した情報に基づき、カード印刷装置によりカードに新たに情報を消去可能に書き込み又はカードに記録される情報を消去する。
【解決手段】一端に入口(4)が設けられる搬送通路(5)に沿ってカード(70)を搬送する搬送手段(T)と、搬送通路(5)に設けられて搬送通路(5)に沿って搬送されるカード(70)に記録された情報を読み出す読出手段(R)と、カード(70)の表面に情報を記録しかつ記録された情報を消去する記録消去可能な印刷手段(P)と、搬送手段(T)、読出手段(R)及び印刷手段(P)に接続されかつ読出手段(R)から送出される情報に基づいて、カード(70)の表面に情報を記録し又はカード(70)の表面に記録された情報の消去を決定して、搬送手段(T)及び印刷手段(P)の動作を制御する制御手段(IC)とをカード印刷装置に設ける。
【解決手段】一端に入口(4)が設けられる搬送通路(5)に沿ってカード(70)を搬送する搬送手段(T)と、搬送通路(5)に設けられて搬送通路(5)に沿って搬送されるカード(70)に記録された情報を読み出す読出手段(R)と、カード(70)の表面に情報を記録しかつ記録された情報を消去する記録消去可能な印刷手段(P)と、搬送手段(T)、読出手段(R)及び印刷手段(P)に接続されかつ読出手段(R)から送出される情報に基づいて、カード(70)の表面に情報を記録し又はカード(70)の表面に記録された情報の消去を決定して、搬送手段(T)及び印刷手段(P)の動作を制御する制御手段(IC)とをカード印刷装置に設ける。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、書き換え可能にカードに情報を印刷できるカード印刷装置及びカード印刷収納装置に関連する。
【背景技術】
【0002】
印字と消去を反復できる感熱式リーダライターは、ロイコ染料と顕色剤との相互作用を応用する。可逆性顕色剤を用いて、加熱温度と冷却時間を制御して、発色と消去のリライト特性を実現する。例えば、染料と顕色剤の融点(例えば、約170℃)以上の温度をかけると、印字層中に存在する染料と顕色剤は、溶け合う状態となり、この状態で急激に冷却すると染料と顕色剤とが混合しまま結晶化して発色状態を保つことができる。一方、融点以上の温度から徐々に冷却すると、染料と顕色剤が個別に結晶化して発色状態が保持されず、消色状態になる。また、染料と顕色剤の融点以下でもある一定時間の加熱により染料と顕色剤が徐々に分離して結晶化し、消色状態となる温度域(大体120〜140℃)がある。つまり、染料と顕色剤の混合物の結晶化過程を制御して、感熱式リーダライターの印字と消去を選択することができる。印字は感熱ヘッドを使用するが、消去には種々の方法がある。
【0003】
下記特許文献1は、印字部に対する挿入方向が規定される単葉の印字媒体を堆積状態に収納する印字媒体収納手段と、印字媒体を印字部へ搬送する搬送手段と、印字部に対する印字媒体の印字面が規定され、且つ印字媒体の印字面での印字媒体搬送方向に対する前後左右方向が規定された印字媒体の印字部に対する前後左右方向の挿入方向を判別する印字媒体挿入方向判別手段と、印字部を制御して、判別手段の判別結果に対応した印字内容を印字媒体に印字させる印字制御手段とを設けた印字装置を示す。
【0004】
特許文献2は、スロットマシンにチケットを発行するプリンタを搭載したコインレススロットシステムを開示する。特許文献2にはコインレスシステムとして、クーポン券を発行することにより、硬貨の払出しを省略して、カジノ運用面での滞留現金を大幅に削減でき、一般に広く普及している。しかしながら、紙を使用するクーポン券は、プレイするゲーム機を替える毎又精算毎にチケットを発行する必要があるため、使用するチケット枚数が膨大となり、コストダウンを図ることができない。
【0005】
【特許文献1】特許2796021号公報
【特許文献2】米国特許第6048269号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
一方、同様な問題がパチンコ市場にもあり、記録媒体を再発行できる特許文献2に示される装置又は特許文献3に示される記録媒体も提案される。しかしながら、従来の記録媒体の変更には、発行装置自体の変更と共に、発行装置を搭載するゲーム機自体の大幅な設計変更が必要となり、発行装置の搭載空間を確保する必要もあり、装置全体の小型化が要望されていた。
【0007】
本発明は、カードに記録されて読み出した情報に基づいてカードに新たに情報を消去可能に書き込み又はカードに記録される情報を消去するカード印刷装置を提供することを目的とする。本発明は、カードに記録されて光学的又は磁気的に読み出した情報に基づいてカードに新たに情報を消去可能に書き込み又はカードに記録される情報を消去するカード印刷装置を提供することを目的とする。本発明は、外部制御装置からの指令信号に基づいてカードに新たに情報を消去可能に書き込み又はカードに記録される情報を消去するカード印刷装置を提供することを目的とする。本発明は、所定の情報のみを消去可能に書き込み又はカードに記録される情報を消去するカード印刷装置を提供することを目的とする。本発明は、カードを収納できる収納手段を前記カード印刷装置に設けたカード印刷収納装置を提供することを目的とする。本発明は、収納手段からカードを取り出して所定の情報を消去可能に印刷して発行するカード印刷収納装置を提供することを目的とする。本発明は、所定の情報を含まないカードを収納手段に保存するカード印刷収納装置を提供することを目的とする。本発明は、選択的にカードに情報を印刷し又はカードに印刷される情報を消去して、カードを保存できる収納手段を有するカード印刷収納装置を提供することを目的とする。本発明は、従来のゲーム機及び管理システムの変更を最小減に抑制しかつカードを確実に再利用して装置の小型化を図れるカード印刷装置及びカード印刷収納装置を提供することにある。
【課題を解決するための手段】
【0008】
本発明のカード印刷装置は、一端に入口(4)が設けられる搬送通路(5)に沿ってカード(70)を搬送する搬送手段(T)と、搬送通路(5)に設けられて搬送通路(5)に沿って搬送されるカード(70)に記録された情報を読み出す読出手段(R)と、カード(70)の表面に情報を記録しかつ記録された情報を消去する記録消去可能な印刷手段(P)と、搬送手段(T)、読出手段(R)及び印刷手段(P)に接続されかつ読出手段(R)から送出される情報に基づいて、カード(70)の表面に情報を記録し又はカード(70)の表面に記録された情報の消去を決定して、搬送手段(T)及び印刷手段(P)の動作を制御する制御手段(IC)とを備える。入口(4)に挿入されるカード(70)を搬送手段(T)により搬送通路(5)に沿って移動しながら、読出手段(R)によりカード(70)に記録された情報を読み出して、制御手段(IC)に読み出した情報を送信すると、制御手段(IC)は、読み出した情報に基づいてカード(70)に書き込み可能に情報を印刷し又はカードに印刷された情報を消去する。本発明では、「カード」は、紙製、樹脂製又は紙と樹脂とを積層若しくは混合した券又はクーポン等の小片をいう。
【発明の効果】
【0009】
本発明のカード印刷装置及びカード印刷収納装置により、遊技場での券、運搬手段への乗車券、搭乗券又はパス、カジノ(賭博場)、マーケット又はデパートでのクーポン券等での反復使用可能なカードとして使用できるため、一回のみ使用される紙又は樹脂の使用量を低減して、資源を節約することができる。
【発明を実施するための最良の形態】
【0010】
本発明によるカード印刷装置とカード印刷収納装置の実施の形態を図1〜図44について説明する。
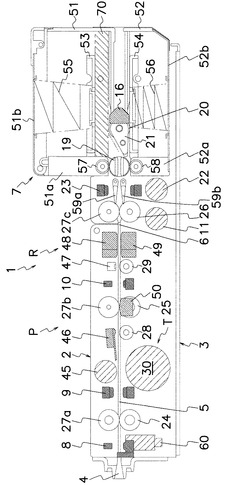
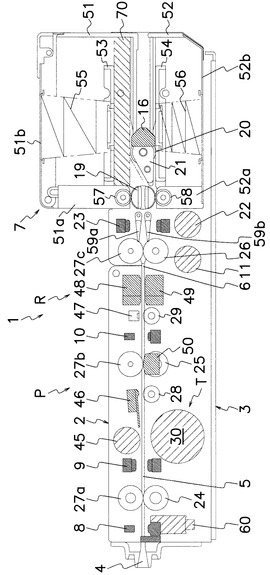
図1に示すように、本発明のカード印刷収納装置は、カード印刷装置(1)と、カード印刷装置(1)に対して着脱自在に装着される収納手段(7)とを備える。カード印刷装置(1)は、一端に入口(4)が設けられる搬送通路(5)に沿ってカード(70)を搬送する搬送手段(T)と、搬送通路(5)に設けられて搬送通路(5)に沿って搬送されるカード(70)に記録された情報を読み出す読出手段(R)と、カード(70)の表面に情報を記録しかつ記録された情報を消去する記録消去可能な印刷手段(P)と、
搬送手段(T)、読出手段(R)及び印刷手段(P)に接続されかつ読出手段(R)から送出される情報に基づいて、カード(70)の表面に情報を記録し又はカード(70)の表面に記録された情報の消去を決定して、搬送手段(T)及び印刷手段(P)の動作を制御する制御手段(IC)(図44)とを備える。
【0011】
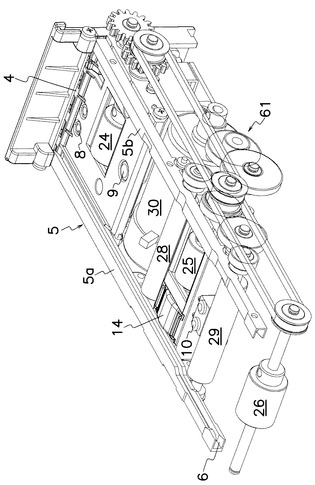
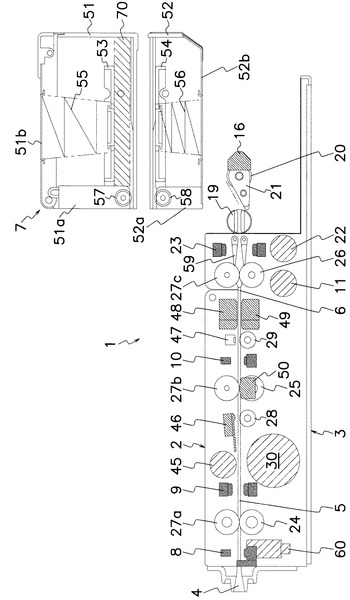
搬送手段(T)は、搬送通路(5)の入口(4)に挿入されるカード(70)を検出して検出信号を制御手段(IC)に発生する入口センサ(8)と、入口センサ(8)の検出信号を受信する制御手段(IC)により駆動されてカード(70)を搬送通路(5)に沿って移動する搬送装置(C)とを備える。搬送装置(C)は、搬送モータ(30)と、搬送モータ(30)に駆動連結される種々の複数の歯車、複数のベルト、複数のローラ及びそれらの関連部品を含む。例えば、搬送手段(T)は、入口センサ(8)の後方で搬送通路(5)に対向して配置される一対の入口ローラ(24,27a)と、入口ローラ(24,27a)の後方で搬送通路(5)に配置されてカード(70)の通過を検出する前部センサ(9)と、前部センサ(9)の後方で搬送通路(5)に対向して配置される一対の中間ローラ(25,27b)と、中間ローラ(25,27b)の後方で搬送通路(5)に配置されてカード(70)の通過を検出する中間センサ(10)と、中間センサ(10)の後方で搬送通路(5)に対向して配置される一対の後方ローラ(26,27c)と、後方ローラ(26,27c)の後方で搬送通路(5)に対向して配置される後方センサ(23)と、後方ローラ(26,27c)の後段に互いに独立して駆動される一対のフラップ(59a,59b)と、収納手段(7)内に回転可能に設けられるロータリガイド(19)を含む回転ガイド装置(RD)と、収納手段(7)内に回転可能に設けられるスタックローラ(20)を含むスタックローラ装置(SR)と、収納手段(7)内に揺動可能に設けられるディフレクタ(21)を含むガイド装置(G)とを備える。カード印刷装置(1)に対して収納手段(7)の保管手段(51)と回収手段(52)とを個別に着脱自在に取り付ける状態を図43に示す。
【0012】
読出手段(R)は、カード(70)に磁気により記録又は印刷される情報を検出する磁気ヘッド(50)若しくはホールセンサ又はこれらの組合せによる磁気センサと、カード(70)に着色されて記録又は印刷される情報を光学的に読み出すイメージセンサ(48,49)、ホトカプラ若しくはCCDカメラ又はこれらの組合せによる光学センサとを含む。
【0013】
記録消去可能に情報を印刷できる印刷手段(P)は、搬送通路(5)に沿って配置されて部分的に加熱することによりカード(70)に情報を印刷する感熱式の印刷ヘッド(46)と、搬送通路(5)に接近する印刷位置と、搬送通路(5)から離間する休止位置との間で印刷ヘッドを移動するヘッドドライバ(45)と、搬送通路(5)に沿って配置され部分的に加熱することによりカード(70)から情報を消去する感熱式の消去ヘッド(47)とを備える。
【0014】
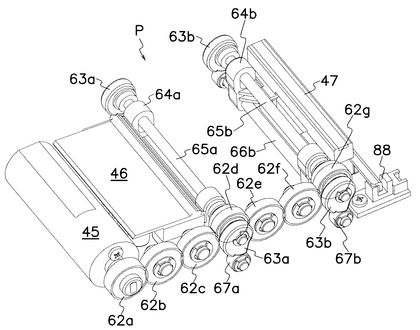
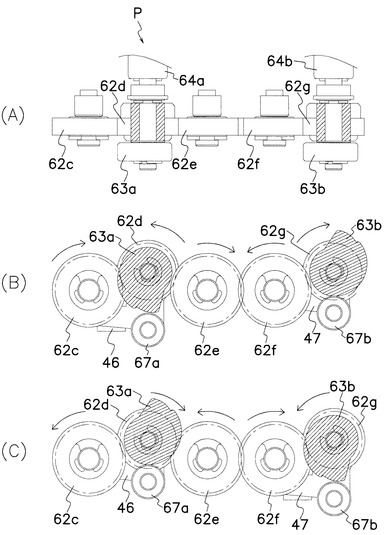
図3は印刷手段(P)の斜視図であり、図4(A)は、印刷手段(P)の平面図、図4(B)は、サーマルヘッド(46)が下位置に移動した状態を示す側面図、図4(C)は、サーマルヘッド(46)が上位置に移動した状態を示す側面図である。印刷手段(P)は、ヘッド保持モータ(ヘッドドライバ)(45)と、ヘッド保持モータ(45)の出力軸に固定された歯車(62a)と、回転可能に支持されて歯車(62a)に噛合う歯車(62b,62c)を介してサーマルヘッドカム軸(65a)に固定される歯車(62d)と、サーマルヘッドカム軸(65a)に固定されるプリントヘッドカム(63a)と、プリントヘッドカム(63a)の外周に当接するプリントヘッド受けカラー(67a)とを備える。従って、ヘッド保持モータ(45)及びプリントヘッドカム(63a)の回転により、プリントヘッドカラー(67a)が垂直方向の上下運動を行う。プリントヘッド受けカラー(67a)は、図示しないスプリング等の弾性偏倚装置によりプリントヘッドカム(63a)に常時接触するように付勢される。プリントヘッドカラー(67a)には、サーマルヘッド(46)の一端が固定されるので、プリントヘッドカラー(67)の垂直移動に伴い、サーマルヘッド(46)は、搬送通路(5)を通過するカード(70)に接触する図4(B)に示す下位置と、カード(70)から離間する図4(C)に示す上位置との間で移動して、図34のステップ135に示すように、動作する。下位置にあるサーマルヘッド(46)は、サーマルセンサ(88)により検出され、サーマルセンサ(88)の検出信号は、制御手段(IC)に送出される。
【0015】
また、印刷手段(P)は、サーマル保持モータ(45)に駆動連結される歯車(62d)に更に駆動連結される歯車(62e,62f,62g)と、一端に歯車(62g)を固定するイレースヘッドシャフト(65b)と、イレースヘッドシャフト(65b)の他端に固定されるイレースヘッドカム(63b)と、イレースヘッドカム(63b)の外周に当接するイレースヘッド受けカラー(67b)と、イレースヘッド受けカラー(67b)に一端が固定されるイレースヘッド(47)とを備える。プリントヘッド受けカラー(67b)は、図示しないスプリング等の弾性偏倚装置によりイレースヘッドカム(63b)に常時接触するように付勢される。従って、サーマル保持モータ(45)の回転により、イレースヘッドカム(63b)が回転されて、イレースヘッド(47)は、搬送通路(5)を通過するカード(70)に接触する下位置と、カード(70)から離間する上位置との間で垂直方向の上下移動を行う。下位置にあるイレースヘッド(47)は、イレースセンサ(89)により検出され、イレースセンサ(89)の検出信号は、制御手段(IC)に送出される。従って、サーマル保持モータ(45)の正転により、例えば図4(B)に示すように、サーマルヘッド(46)が下位置にあるとき、イレースヘッド(47)は、上位置となり、カード(70)への書込みが可能となる。これに対し、サーマル保持モータ(45)が逆転すると、図4(C)に示すように、サーマルヘッド(46)が上位置となり、イレースヘッド(47)が下位置となるとき、カード(70)への消去が可能になる。印刷手段(P)の詳細な動作を図34のステップ129以下に説明する。
【0016】
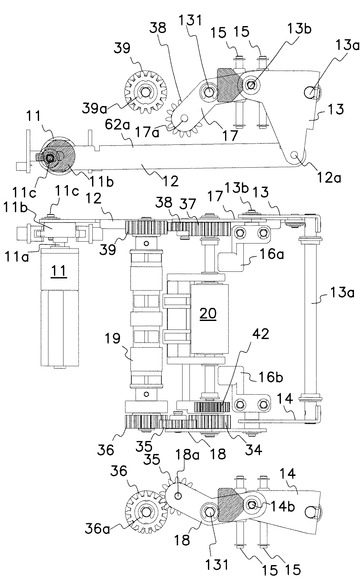
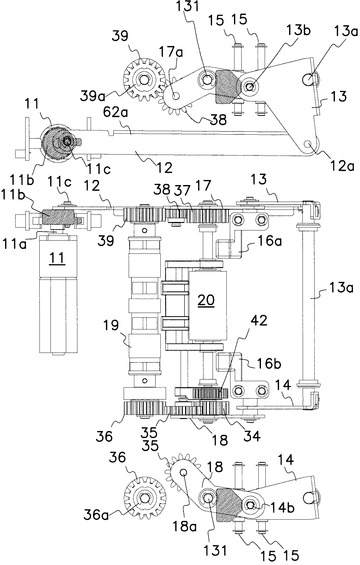
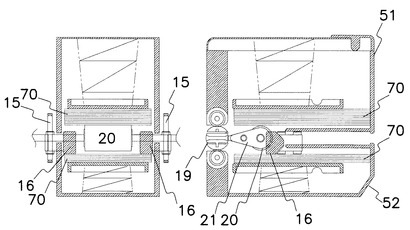
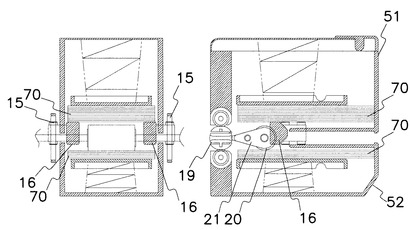
図11及び図12に示すように、保持手段(H)を構成してカード印刷装置(1)内に配置される保持モータ(11)の駆動軸(11a)にディスク(11b)が固定され、ディスク(11b)には偏心ピン(11c)が固定される。偏心ピン(11c)には、コンロッド(12)の一端が軸着され、コンロッド(12)の他端は、軸(12a)により第1のベルクランク(13)の一端に軸着される。第1のベルクランク(13)は、軸(13a)の一端に回転可能に軸着され、第1のベルクランク(13)の他端は、軸(13b)を介して第1のレバー(17)の一端に軸(13b)で軸着される。第1のレバー(17)は、軸(131)の周りに回転可能に軸着され、第1のレバー(17)の他端には、歯車(38)が回転可能に軸(38)に軸着される。水平に延伸する軸(13a)の他端には、第2のベルクランク(14)が軸(13a)と一体回転可能に固定される。第2のベルクランク(14)の端部は、軸(14a)により第2のレバー(18)に軸着され、第2のレバー(18)は、軸(131)の周りに回転可能に軸着され、第2のレバー(18)の他端には、歯車(35)が軸(18a)により回転可能に軸着される。
【0017】
保持モータ(11)の正転により、コンロッド(12)が保持モータ(11)に接近する方向に移動すると、図11に示すように、第1のベルクランク(13)は、軸(13a)の周りに時計方向に回転するので、第1のレバー(17)は、反時計方向に回転して、歯車(38)は、ロータリガイド(19)の一端に固定された歯車(39)から離脱して離間する方向に移動する。同時に、軸(13a)に固定される第2のベルクランク(14)は、時計方向に回転するので、第2のレバー(18)は、反時計方向に回転し、歯車(35)は、ロータリガイド(19)の他端に固定された歯車(36)に接近して、噛合う。第1のベルクランク(13)の時計方向の回転により軸(13b)は、上方に移動するので、軸(13b)に固定された第1のホルダ(16a)は、ガイド(15)に沿って上位置に上昇する。同時に、第2のベルクランク(14)の時計方向の回転により軸(14b)は、上位置に移動するので、軸(14b)に固定される第2のホルダ(16b)は、ガイド(15)に沿って上位置に上昇する。第1のホルダ(16a)と第2のホルダ(16b)とを統合して、必要に応じてホルダ(16)として説明する。
【0018】
保持モータ(11)の逆転により、コンロッド(12)が保持モータ(11)から離間する方向に移動すると、図12に示すように、第1のベルクランク(13)は、軸(13a)の周りに反時計方向に回転するので、第1のレバー(17)は、時計方向に回転して、歯車(38)は、ロータリガイド(19)の一端に固定された歯車(39)に接近して噛合う。同時に、軸(13a)に固定される第2のベルクランク(14)は、反時計方向に回転するので、第2のレバー(18)は、時計方向に回転し、歯車(35)は、ロータリガイド(19)の他端に固定された歯車(36)から離脱して離間する方向に移動する。第1のベルクランク(13)の反時計方向の回転により軸(13b)は、下方に移動するので、軸(13b)に固定された第1のホルダ(16a)は、ガイド(15)に沿って下位置に下降する。同時に、第2のベルクランク(14)の反時計方向の回転により軸(14b)は、下方に移動するので、軸(14b)に固定された第2のホルダ(16b)は、ガイド(15)に沿って下位置に下降する。ディスク(11b)、コンロッド(12)、第1のベルクランク(13)、第2のベルクランク(14)、第1のレバー(17)及び第2のレバー(18)は、リンク装置(L)を構成する。
【0019】
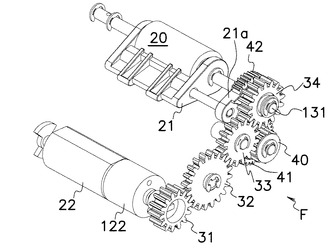
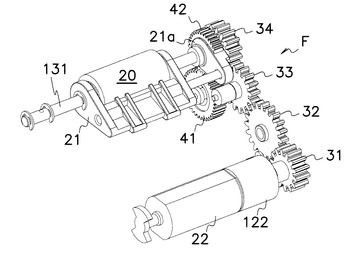
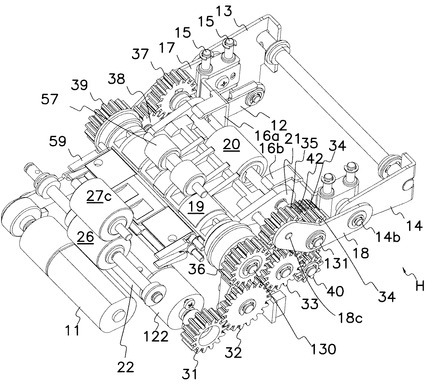
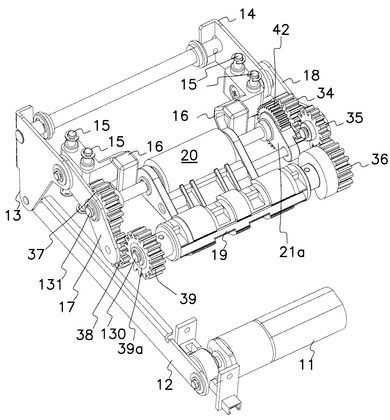
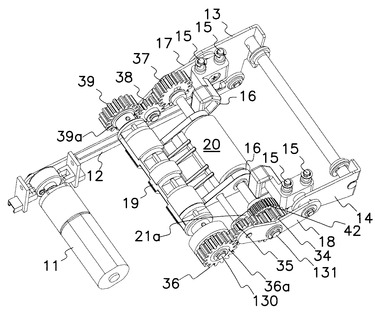
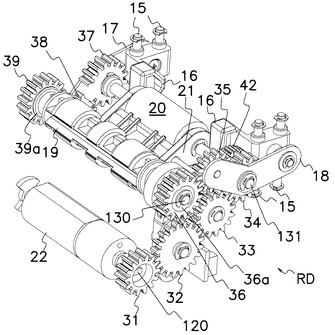
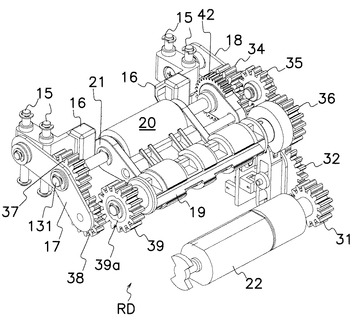
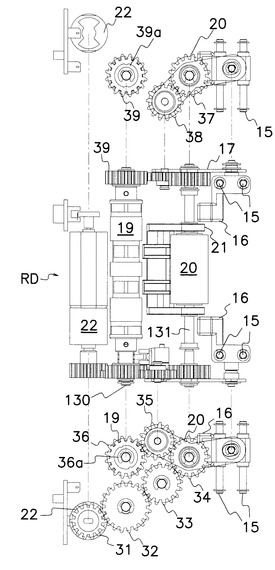
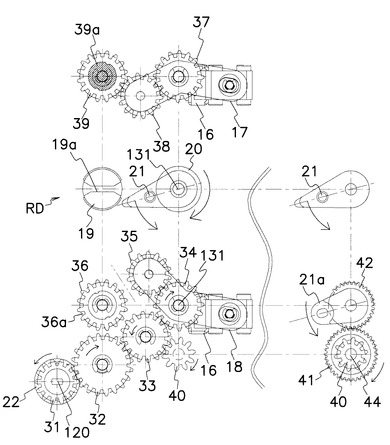
図8に示すロータリガイド(19)とスタックローラ(20)の駆動方法について説明する。スタックモータ(22)の出力軸には、減速装置(122)が固定され、減速装置(122)の回転力は、歯車(31,32,33)を介して軸(131)に固定された歯車(34)に伝達される。また、軸(131)には、第2のレバー(18)が揺動可能に軸支され、第2のレバー(18)の一端は、第2のホルダ(16b)を支持する軸(14b)に回転可能に軸着され、第2のレバー(18)の他端に設けられる軸(18a)には、歯車(35)が軸支され、歯車(34)の回転力が歯車(35)に伝達される。
【0020】
ロータリガイド(19)は、図示しないワンウエイクラッチを介して軸(130)に固定され、軸(130)の一端に歯車(36)が固定される。第2のホルダ(16b)が図11に示す下位置にあるとき、第2のレバー(18)が軸(131)の周りに下方に揺動して、歯車(35)は、歯車(36)に駆動接続される。このとき、第1のベルクランク(13)は、時計方向に回転するので、第1のレバー(17)は、軸(131)の周りに反時計方向に回転するので、図11に示すように、軸(17a)で第1のレバー(17)に取り付けられる歯車(38)は、歯車(39)から離間して、係合が解除される。逆に、第2のホルダ(16b)が図12に示す上位置にあるとき、第2のレバー(18)が軸(131)の周りに上方に揺動して、歯車(35)は、歯車(36)との係合が解除される。このとき、第1のベルクランク(13)は、反時計方向に回転するので、第1のレバー(17)は、軸(131)の周りに時計方向に回転するので、図12に示すように、軸(17a)で第1のレバー(17)に取り付けられる歯車(38)は、歯車(39)に接近して、係合される。即ち、図11に示すように、第1のホルダ(16a)と第2のホルダ(16b)が上位置にあるとき、歯車(35)の回転力は、歯車(36)に伝達されるが、歯車(38)は、歯車(39)から分離される。逆に、図12に示すように、第1のホルダ(16a)と第2のホルダ(16b)が下位置にあるとき、歯車(35)は、歯車(36)から分離されるが、歯車(38)の回転力は、歯車(39)に伝達される。
【0021】
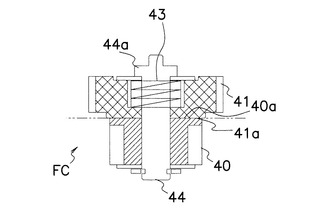
図7に示すように、軸(44)上に回転可能に取り付けられる歯車(40)の摩擦面(40a)と歯車(41)の摩擦面(41a)との間に摩擦クラッチ(FC)が形成される。軸(44)のフランジ(44a)と歯車(41)との間にスプリング(付勢部材)(43)が配置され、歯車(41)は、歯車(40)に対して常時一定の押圧力で付勢される。従って、通常の状態では、歯車(33)から回転力を受ける歯車(40)は、スプリング(43)の弾力により歯車(41)に摩擦係合し、歯車(41)と一体に回転して、歯車(33)の回転力を歯車(41)に伝達する。しかしながら、歯車(41)の回転に対してスプリング(43)による摩擦力を超える抵抗力が発生すると、摩擦クラッチ(FC)は、歯車(40)の摩擦面(40a)と歯車(41)の摩擦面(41a)との間で滑りが発生して、歯車(41)の回転が阻止される。
【0022】
図16に示すように、歯車(33)は、軸(44)上で回転する歯車(40)に連結し、歯車(40)は、摩擦クラッチ(FC)を介して歯車(41)に駆動連結され、歯車(41)は、軸(131)に軸支される歯車(42)に噛合い、歯車(42)の一側面にディフレクタ(21)が固定される。
【0023】
ロータリガイド(19)とスタックローラ(20)の回転について説明すると、軸(131)の他端には、歯車(37)が固定されると同時に、第1のレバー(17)が揺動可能に軸支され、図9に示すように、第1のレバー(17)の一端は、軸(13b)により第1のベルクランク(13)に軸着されると共に、第1のレバー(17)の他端は、歯車(38)が軸(17a)により回転可能に取り付けられる。軸(13b)には、第1のホルダ(16a)が一体移動可能に取り付けられる。歯車(38)は、第1のホルダ(16a)が上位置にあるとき、歯車(39)に噛合い、歯車(38)の回転力が歯車(39)に伝達される。歯車(39)は、図示しないワンウエイクラッチを介してロータリガイド(19)に伝達される。この構成により、ロータリガイド(19)は、第1のホルダ(16a)が上位置にあるとき、歯車(35)から歯車(36)に回転力が伝達され、スタックモータ(22)の駆動力がロータリガイド(19)に伝達される。第1のホルダ(16a)が下位置のとき、スタックモータ(22)の駆動力は、ロータリガイド(19)に伝達されない。スタックモータ(22)の回転力は、歯車(31,32,33,34)を介して軸(131)に伝達され、歯車(34)に固定された軸(131)に固定されたスタックローラ(20)に伝達される。スタックモータ(22)の回転力をスタックローラ(20)に伝達する複数の歯車は、動力伝達手段(F)を構成する。
【0024】
スタックモータ(22)の回転力が歯車(31,32,33,40)、摩擦クラッチ(FC)、歯車(41)に伝達され、歯車(41)から歯車(42)に伝達され、歯車(42)に固定されたディフレクタ(21)に伝達される。歯車(42)の回転により、ディフレクタレバー(21a)が揺動するので、ディフレクタレバー(21a)と一体にディフレクタ(21)が揺動する。ディフレクタ(21)が一定角度回転すると、ディフレクタ(21)が図示しないストッパに当接して、摩擦クラッチ(FC)に滑りが発生し、ディフレクタ(21)のそれ以上の回転が阻止される。ディフレクタ(21)が逆方向に回転するときも、ディフレクタ(21)が逆方向に一定角度回転すると、ディフレクタ(21)は、図示しないストッパに当接して、摩擦クラッチ(FC)に滑りが発生して、ディフレクタ(21)のそれ以上の回転が阻止される。
【0025】
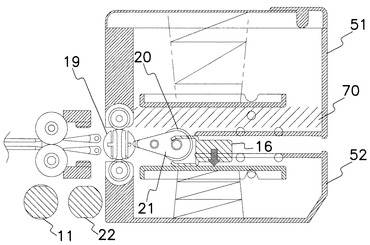
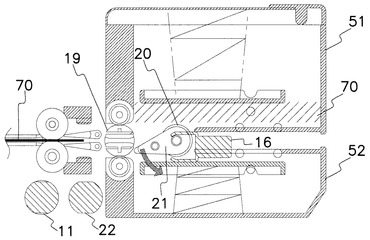
保管手段(51)内にカードを収納する動作を図16について説明する。
図16に示すように、スタックモータ(22)が反時計方向に回転すると、歯車(31)は、反時計方向、歯車(32)は、時計方向、歯車(33)は、反時計方向、歯車(34)は、時計方向に回転する。このとき、スタックローラ(20)は、歯車(34)に固定された軸(131)と一体に時計方向に回転するが、ディフレクタ(21)が図示しないストッパに当接して、摩擦クラッチ(FC)に滑りが発生し、ディフレクタ(21)のそれ以上の回転が阻止される。このとき、図12に示すように、第1のホルダ(16a)と第2のホルダ(16b)は、下位置にあるので、歯車(35,36)の噛合いが離間し、歯車(38,39)が噛合う。図示しないワンウエイクラッチの作用により、歯車(39)の回転力は、ロータリガイド(19)には伝達されず、スリット(19a)を水平位置に保持する状態で、ロータリガイド(19)は、停止する。このとき、スタックモータ(22)と共に歯車(31)が反時計方向、歯車(32)が時計方向、歯車(33)が反時計方向、歯車(40)が時計方向、歯車(42)を介して歯車(42)が反時計方向に回転するため、図23に示すように、ディフレクタ(21)は、下方向に回転される。
【0026】
このとき、図1に示す入口(4)に挿入されるカード(70)は、後方ローラ(26,27c)間及びフラップ(59a,59b)間を通り、ロータリガイド(19)のスリット(19a)内に搬送される。搬送ローラ(27c,26)で搬送されるカード(70)の先端がロータリガイド(19)のスリット(19a)を通過すると、図24に示すように、カード(70)は、下位置にあるディフレクタ(21)の上面に沿い右斜め上方に押し上げられる。カード(70)が更に奥に搬送されると、カード(70)の先端がスタックローラ(20)と接触し、スタックローラ(20)の回転力によりカード(70)は、保管手段(51)の奥に搬送されて、カード(70)の後端が後部センサ(23)を通過し、所定パルス計数後に、スタックモータ(22)は、停止され、保管手段(51)への収納を終了する。
【0027】
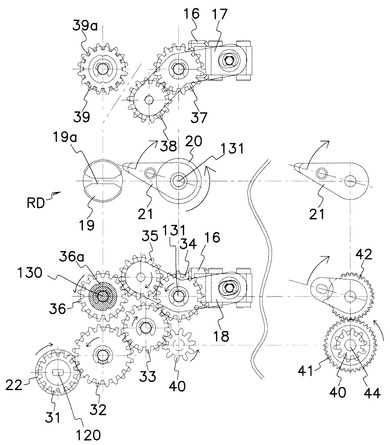
回収手段(52)内にカードを収納する動作を図17、図26及び図27について説明する。図17に示すように、スタックモータ(22)が時計方向に回転すると、歯車(31)に噛合う歯車(32)は、反時計方向、歯車(32)に噛合う歯車(33)は、時計方向、歯車(33)に噛合う歯車(34)は、反時計方向に回転し、歯車(34)の回転力は、軸(131)を介してスタックローラ(20)の反時計方向の回転に伝達される。このとき、第1のホルダ(16a)及び第2のホルダ(16b)は、上位置にあるため、歯車(34)の反時計方向の回転駆動力は、歯車(35)に時計方向に伝達され、歯車(35)の回転駆動力が歯車(36)の反時計方向の回転駆動力に伝達される。このとき、歯車(36)の回転力は、ワンウエイクラッチの作用により遮断されて、ロータリガイド(19)は、スリット(19a)が水平にある状態で回転停止する。スタックモータ(22)の時計方向の回転が歯車(31)を介して歯車(32)の反時計方向、歯車(32)に噛合う歯車(33)は、時計方向、歯車(33)に噛合う歯車(40)は、反時計方向に回転し、歯車(40)の回転は、摩擦クラッチ(FC)を介して歯車(41)に伝達され、反時計方向に回転する歯車(41)の回転力が歯車(42)に伝達され、図26及び図27に示すように、ディフレクタ(21)が上位置に揺動される。
【0028】
搬送ローラ(27c,26)間に挟持されるカード(70)は、フラップ(59a,59b)間及びロータリガイド(19)のスリット(19a)内を通過する。カード(70)の先端は、ディフレクタ(21)に当接して、カード(70)の先端は、右斜め下方に案内される。カード(70)の先端がスタックローラ(20)に到達すると、反時計方向に回転するスタックローラ(20)の回転力がカード(70)に伝達され、カード(70)が回収手段(52)の奥に搬送される。カード(70)の後端が後部センサ(23)を通過した後、所定パルスを計数した後にスタックモータ(22)の回転は、停止する。
【0029】
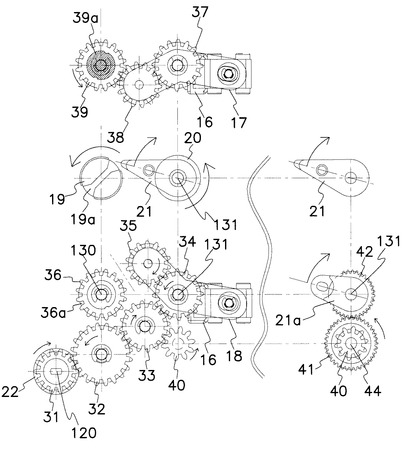
保管手段(51)からカード(70)を排出するとき、使用者が図示しない精算ボタンを操作すると、図18でスタックモータ(22)は、時計方向に回転し、歯車(31)が時計方向、歯車(31)に噛合う歯車(32)が反時計方向、歯車(32)に噛合う歯車(33)が時計方向、歯車(33)に噛合う歯車(34)は、反時計方向、歯車(34)を固定する軸(131)を介してスタックローラ(20)が反時計方向に回転する。軸(131)に固定される歯車(37)は、反時計方向に回転し、歯車(37)に噛合う歯車(38)は、時計方向に回転する。このとき、第1のホルダ(16a)と第2のホルダ(16b)は、下位置にあるので、第2のレバー(18)が下方に揺動して、歯車(35)と歯車(36)の係合が解除される。第1のレバー(17)を介して歯車(38)は、歯車(39)に噛合う。歯車(37)の回転により、歯車(38)は、時計方向に回転し、歯車(39)は、反時計方向に回転する。歯車(39)の回転力は、ロータリガイド(19)の反時計方向の回転として伝達される。
【0030】
スタックモータ(22)の時計方向の回転により、歯車(31)は、時計方向、歯車(31)に噛合う歯車(32)は、反時計方向、歯車(32)に噛合う歯車(33)は、時計方向、歯車(33)に噛合う歯車(40)は、反時計方向に回転する。歯車(40)の回転は、摩擦クラッチ(FC)を介して歯車(41)の回転に伝達される。歯車(41)に噛合う歯車(42)は、時計方向に回転し、歯車(41)の回転に伴いディフレクタ(21)は、図29に示す上位置に移動する。このとき、図29に示すように、第1のホルダ(16a)と第2のホルダ(16b)は、下位置にあるので、保管手段(51)内に収容される最下部のカード(70)の底面は、スタックローラ(20)に接触する。スタックローラ(20)が反時計方向に回転すると、スタックローラ(20)に接触するカード(70)は、ロータリガイド(19)に向かって繰出される。このとき、ディフレクタ(21)の位置が上位置にあるので、カード(70)の先端は、ロータリガイド(19)の外周に沿ってロータリガイド(19)に接触する上部ガイドローラ(57)方向に搬送され、ロータリガイド(19)と上部ガイドローラ(57)との間に挟持されるカード(70)は、更に入口(4)に向かって搬送され、上部フラップ(59a)を押し下げならが、搬送ローラ(27c,26)間に挟持され、更に入口(4)方向に搬送される。
【0031】
回収手段(52)からカード(70)を排出するとき、図示しないが、第1のホルダ(16a)及び第2のホルダ(16b)は、上位置にあり、回収手段(52)内に収容される最上位置のカード(70)の上面は、スタックローラ(20)に接触する。スタックローラ(20)が時計方向に回転すると、カード(70)は、ロータリガイド(19)方向に繰出される。そのとき、ディフレクタ(21)は、下方向にあり、カード(70)の先端は、ロータリガイド(19)の外周と下部ガイドローラ(58)との間に挟持され、ロータリガイド(19)の時計方向の回転により、カード(70)の先端は、ロータリガイド(19)と下部ガイドローラ(58)との間に挟持され、入口(4)方向に搬送される。このとき、カード(70)の先端は、下部フラップ(59b)を押し上げながら、搬送ローラ(27c,26)間に挟持され、入口(4)に向かって搬送される。
【0032】
スタックモータ(22)と保持モータ(11)との組み合わせにより、4つの制御、即ち、保管手段(51)からのカード(70)の繰り出し(図16)、回収手段(52)へのカード(70)の回収(図17)、保管手段(51)へのカード(70)の回収(図18)、回収手段(52)からのカード(70)の繰り出し(図19)が行われる。
【0033】
図30では、保管手段(51)からのカード(70)の繰出しが行われる。図16に示すように、スタックモータ(22)は、正転(時計方向)に回転し、第1のホルダ(16a)と第2のホルダ(16b)の位置が下位置の場合、歯車(35)と歯車(36)の駆動が遮断され、歯車(38)と歯車(39)の駆動が連結される。歯車(31)が時計方向、歯車(32)が反時計方向、歯車(33)が時計方向、歯車(34)が反時計方向、歯車(35)が時計方向、歯車(37)が反時計方向、歯車(38)が時計方向、歯車(39)が反時計方向、歯車(40)が反時計方向、歯車(41)が反時計方向、歯車(42)が時計方向に駆動される。これにより、搬送ローラ(20)は、反時計方向に回転し、ロータリガイド(19)も反時計方向に回転し、ディフレクタ(21)は、上方に回転される。歯車(39)の回転時、歯車(39)に取り付けられる図示しないワンウウェイクラッチは、噛み合い方向に作用し、歯車(39)と同軸上に固定されたロータリガイド(19)は、歯車(39)と同一方向に回転する。
【0034】
図27では、回収手段(52)へのカード(70)の回収が行われる。図17に示すように、スタックモータ(22)(図15)は、時計方向に回転し、第1のホルダ(16a)と第2のホルダ(16b)が上位置にあるとき、歯車(35)と歯車(36)の駆動が連結され、歯車(38)と歯車(39)の駆動が遮断される。歯車(31)が時計方向、歯車(32)が反時計方向、歯車(33)が時計方向、歯車(34)が反時計方向、歯車(35)が時計方向、歯車(36)が反時計方向、歯車(37)が反時計方向、歯車(38)が時計方向、歯車(40)が反時計方向、歯車(41)が反時計方向、歯車(42)が時計方向に駆動される。これにより、搬送ローラ(20)は、反時計方向に回転し、ロータリガイド(19)は、停止し、ディフレクタ(21)は、上方に回転される。歯車(36)の回転時、歯車(36)に取り付けられる図示しないワンウウェイクラッチの作用により、歯車(36)とロータリガイド(19)との間に滑りが生じて、歯車(36)と同軸上に固定されたロータリガイド(19)は回転しない。
【0035】
図24では、保管手段(51)へのカード(70)の回収が行われる。図18に示すように、スタックモータ(22)(図15)は、反時計方向に回転し、第1のホルダ(16a)と第2のホルダ(16b)が下位置にあるとき、歯車(35)と歯車(36)の駆動が遮断され、歯車(38)と歯車(39)の駆動が連結される。歯車(31)が反時計方向、歯車(32)が時計方向、歯車(33)が反時計方向、歯車(34)が時計方向、歯車(35)が時計方向、歯車(37)が時計方向、歯車(38)が反時計方向、歯車(39)が時計方向、歯車(40)が時計方向、歯車(41)が時計方向、歯車(42)が反時計方向に駆動される。これにより、搬送ローラ(20)は、時計方向に回転し、ロータリガイド(19)は、停止し、ディフレクタ(21)は、下方に回転される。歯車(39)の回転時、歯車(39)に取り付けられる図示しないワンウウェイクラッチの作用により、歯車(39)とロータリガイド(19)との間に滑りが生じて、歯車(39)と同軸上に固定されたロータリガイド(19)は回転しない。
【0036】
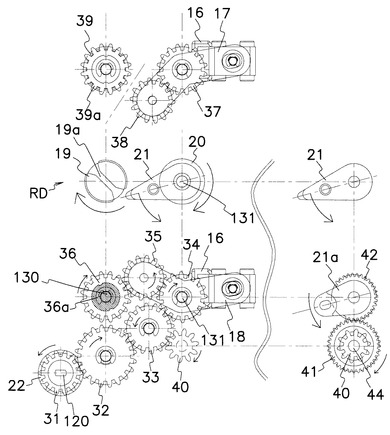
回収手段(52)からカード(70)を排出するとき、図19に示すように、スタックモータ(22)(図15)は、反時計方向に回転し、第1のホルダ(16a)と第2のホルダ(16b)の位置が、上位置の場合、歯車(35)と歯車(36)の駆動が連結され、歯車(38)と歯車(39)の駆動が遮断される。歯車(31)が反時計方向、歯車(32)が時計方向、歯車(33)が反時計方向、歯車(34)が時計方向、歯車(35)が反時計方向、歯車(36)が時計方向、歯車(37)が時計方向、歯車(38)が反時計方向、歯車(40)が時計方向、歯車(41)が時計方向、歯車(42)が反時計方向に駆動される。これにより、搬送ローラ(20)は、時計方向に回転し、ロータリガイド(19)は時計方向に回転し、ディフレクタ(21)は、下方に揺動する。歯車(36)の回転時、歯車(36)に取り付けられるワンウウェイクラッチ(36a)は、噛み合い方向に作用し、歯車(36)と同軸上に固定されたロータリガイド(19)は、歯車(36)と同一方向に回転する。
【0037】
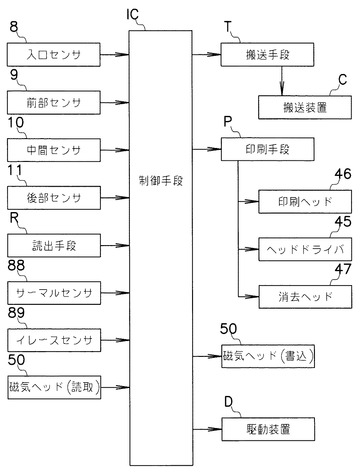
本発明のカード印刷装置及びカード印刷収納装置は、図44に示す電気的構成を備える。単数又は複数のマイクロコンピュータ、集積回路又はディスクリート回路により構成される制御装置となる制御手段(IC)の入力端子には、入口センサ(8)、前部センサ(9)、中間センサ(10)、後部センサ(11)、読出手段(R)、サーマルセンサ(88)、イレースセンサ(89)、ヘッドドライバ(45)及び読出時の磁気ヘッド(50)が接続される。また、制御手段(IC)の出力端子には、搬送手段(T)、印刷手段(P)、書込時の磁気ヘッド(50)及び駆動手段(D)に接続される。搬送手段(T)には、搬送装置(C)が接続され、印刷手段(P)には、印刷ヘッド(46)、ヘッドドライバ(45)及び消去ヘッド(47)が接続される。
【0038】
図44に示すカード印刷装置及びカード印刷収納装置の電気回路は、図32乃至図42に示す動作シーケンスに従って作動される。
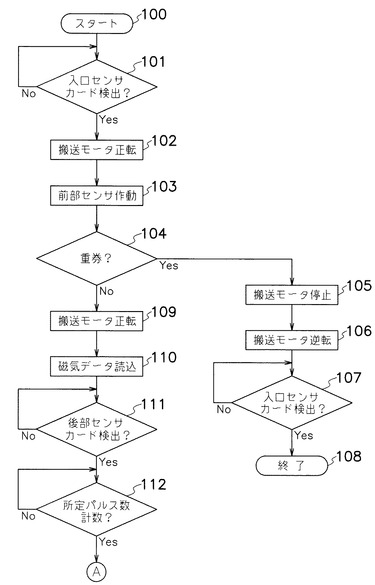
図31〜図37は、入口(4)に挿入するカード(70)を保管手段(51)内に収容する過程を示す。図32に示すスタート(ステップ100)からステップ101に進み、制御手段(IC)は、カード印刷装置(1)の入口(4)にカード(70)を挿入して、入口センサ(8)がカード(70)を検出したか否か判断する。カード(70)の挿入を検出する入口センサ(8)の検出信号を受信する制御手段(IC)は、搬送モータ(30)に駆動信号を付与して、搬送モータ(30)を正転する(ステップ102)ので、カード(70)は、搬送通路(5)に沿って内側に搬送される。前部センサ(9)がカード(70)を検出すると、前部センサ(9)は、検出信号を発生する(ステップ103)。次に、ステップ104では、前部センサ(9)からの検出信号を受信する制御手段(IC)は、検出信号から、カード(70)が複数重なる状態で搬送するか否か、即ち重券か否か判断する(ステップ104)。制御手段(IC)が重券と判断すると、ステップ105に進み、搬送モータ(30)の駆動を停止し、逆転(ステップ106)して、入口(4)にカード(70)を戻し、入口センサ(8)が戻されたカード(70)を検出(ステップ107)すると、ステップ108に進み、一連の動作を終了する。この状態では、使用者が入口(4)から突出するカード(70)を引き抜いて、カード(70)をカード印刷装置(1)から取り出すことができる。
【0039】
ステップ104では、制御手段(IC)が重券と判断せず、単一券と判断するとき、ステップ109に進み、更に搬送モータ(30)を正転して、カード(70)を搬送通路(5)の奥に移送する。磁気ヘッド(50)は、移動するカード(70)に磁気で記録されるバーコード又は他のコードを読み出して、制御手段(IC)に読出し信号を送出する(ステップ110)ので、制御手段(IC)は、読み出したバーコードからカード(70)の内容を判断する。磁気記録されるバーコードの代わりに、カード(70)に記録されるバーコードを何らかの光学センサにより光電子的に読み出して、制御手段(IC)に送出してもよい。次に、ステップ111に進み、後部センサ(23)がカード(70)の通過を検出したか否か判断する。後部センサ(23)がカード(70)の通過を検出すると、検出信号を制御手段(IC)に送出して、ステップ112に進み、制御手段(IC)は、搬送モータ(30)に作動接続されるロータリエンコーダが所定のパルス数を計数したか否か判断する。
【0040】
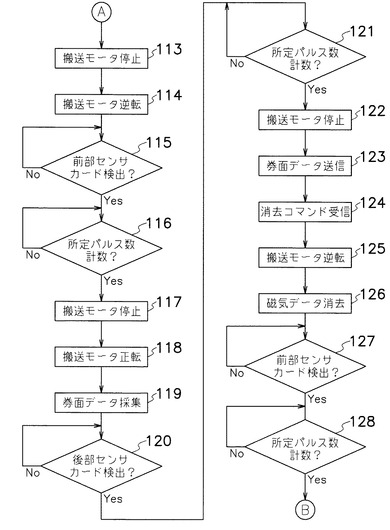
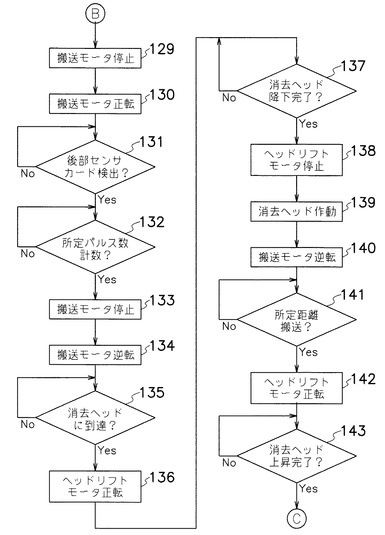
ステップ113では、ロータリエンコーダが所定のパルス数を計数したとき、搬送モータ(30)を停止した後、搬送モータ(30)を逆転する(ステップ114)。次に、ステップ115では、前部センサ(9)がカード(70)を検出したか否か判断し、前部センサ(9)がカード(70)を検出して検出信号を制御手段(IC)に送出する。ステップ116は、ロータリエンコーダが所定のパルス数を計数したか否か判断し、所定のパルス数を計数すると、ステップ117で搬送モータ(30)を停止し、ステップ118で再度搬送モータ(30)を正転して、イメージセンサ(48,49)がカード(70)の表面に記録される券面データを採取する(ステップ119)。その後、ステップ120に進み、後部センサ(23)がカード(70)を検出したか否か判断する。ステップ120にて後部センサ(23)がカード(70)を検出して、検出信号を制御手段(IC)に送出すると、制御手段(IC)は、ロータリエンコーダが所定パルス数を検出したか否か判断する(ステップ121)。ロータリエンコーダが所定パルス数を検出すると、ステップ122で搬送モータ(30)を停止し、ステップ123でイメージセンサ(48,49)が採取した券面データを制御手段(IC)に送出し、ステップ124で印刷手段(P)は、制御手段(IC)から消去コマンドを受信し、ステップ(125)で搬送モータ(30)を逆転して、ステップ126で磁気ヘッド(50)は、カード(70)に磁気記録されたデータを消去する。続いて、制御手段(IC)は、ステップ127で前部センサ(9)がカード(70)を検出したか否か判断し、前部センサ(9)がカード(70)を検出すると、ステップ128でロータリエンコーダが所定のパルス数を計数したか否か判断する。所定のパルス数を検出すると、ステップ129で搬送モータ(30)を停止した後、ステップ130で搬送モータ(30)を正転する。
【0041】
次に、ステップ131で後部センサ(23)がカード(70)を検出したか否か判断し、カード(70)を検出すると、ステップ132でロータリエンコーダが所定のパルス数を検出したか否か判断する。所定のパルス数を検出すると、ステップ133で搬送モータ(30)を停止しかつステップ134で搬送モータ(70)を逆転した後、制御手段(IC)は、ステップ135でカード(70)が消去ヘッド(47)に到達したか否か判断する。消去ヘッド(47)に到達したとき、ステップ136でヘッド保持モータ(45)を正転し、図示しない検出センサによりステップ137で消去ヘッド(47)の降下を完了したか否か判断する。検出センサが消去ヘッド(47)の降下を検出し、検出信号を制御手段(IC)に送出したとき、ステップ138でヘッド保持モータ(45)を停止する。次に、ステップ139で消去ヘッド(47)を作動し、ステップ140で搬送モータ(30)を逆転した後、ステップ141でロータリエンコーダのパルスを計数して、カード(70)を所定距離搬送したか否か判断し、ロータリエンコーダが所定のパルス数を制御手段(IC)に送出して、所定距離搬送したとき、ステップ142でヘッド保持モータ(45)を正転し、ステップ143で図示しない検出センサにより消去ヘッド(47)が上昇を完了したか否かを判断する。
【0042】
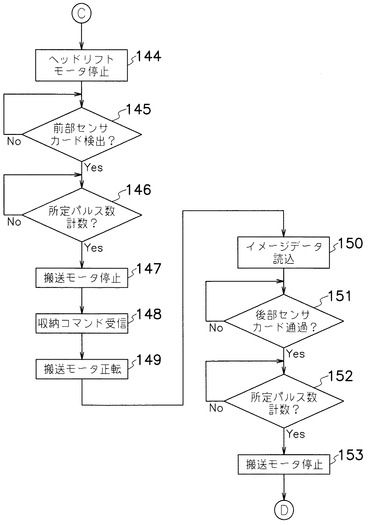
ステップ143にて検出センサが消去ヘッド(47)の上昇を検出し、検出信号を制御手段(IC)に送出したとき、ステップ144にてヘッド保持モータ(45)を停止し、ステップ145にて前部センサ(9)がカード(70)を検出したか否か判断する。前部センサ(9)がカード(70)を検出すると、ステップ146にてロータリエンコーダが所定パルス数を計数したか否か判断し、所定パルス数を計数すると、ステップ147で搬送モータ(30)を停止し、ステップ148で制御手段(IC)からイメージセンサ(48,49)が収納コマンドを受信したか否か判断する。続いて、ステップ149にて搬送モータ(30)を正転し、ステップ150にてイメージセンサ(48,49)がカード(70)からイメージデータを読み込み、ステップ151では、後部センサ(23)の検出信号により、制御手段(IC)は、カード(70)が後部センサ(23)を通過したか否か判断する。カード(70)が後部センサ(23)を通過すると、ステップ152でロータリエンコーダが所定パルス数を計数したか否か判断し、所定パルス数を計数すると、ステップ153にて搬送モータ(30)を停止する。
【0043】
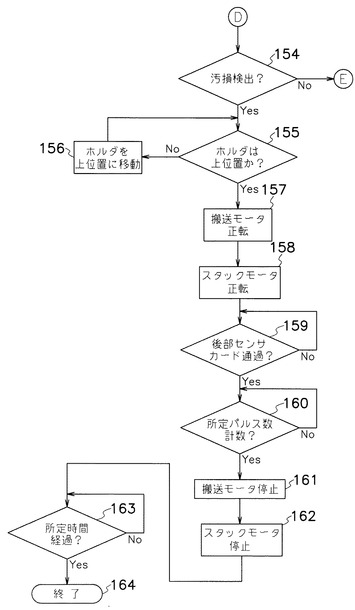
更に、ステップ154では、制御手段(IC)は、イメージセンサ(48,49)の検出信号によりカード(70)に汚染が検出されるか否か判断し、汚染を検出しないと、ステップ165にジャンプし、汚染を検出すると、ステップ155に進み、ホルダ(16a,16b)が上位置にあるか否か判断する。ステップ155にてホルダ(16a,16b)が上位置にないと、制御手段(IC)は、ステップ156にて保持モータ(11)を作動してホルダ(16a,16b)を上位置に移動する。ステップ155にてホルダ(16a,16b)が上位置にあると、ステップ157にて搬送モータ(30)を正転すると共に、ステップ158にてスタックモータ(22)を正転して、ステップ159にて後部センサ(23)がカード(70)の通過を検出したか否か判断する。制御手段(IC)が後部センサ(23)からの検出信号によりカード(70)が後部センサ(23)を検出すると、ステップ160にてロータリエンコーダが所定パルス数を計数したか否か判断し、制御手段(IC)が所定パルス数の計数を検出したとき、制御手段(IC)は、搬送モータ(30)を停止し(ステップ161)かつスタックモータ(22)を停止する。続いて、ステップ163にて制御手段(IC)が内蔵するタイマにより所定時間の経過を検出したとき、動作過程を終了する(ステップ164)。
【0044】
ステップ154にてカード(70)上の汚染を検出しないと、ステップ165に進み、ホルダ(16a,16b)が下位置にあるか否か判断する。ステップ165にてホルダ(16a,16b)が下位置にないと、制御手段(IC)は、ステップ166にて保持モータ(11)を作動してホルダ(16a,16b)を下位置に移動する。ステップ165にてホルダ(16a,16b)が下位置にあると、ステップ167にて搬送モータ(30)を正転すると共に、ステップ168にてスタックモータ(22)を逆転して、ステップ169にて後部センサ(23)がカード(70)の通過を検出したか否か判断する。ステップ169にてカード(70)が後部センサ(23)を通過すると、ステップ170にてロータリエンコーダが所定パルス数を計数したか否か判断し、所定パルス数を計数すると、ステップ171にて搬送モータ(30)を停止し、ステップ172にてスタックモータ(22)を停止する。その後、ステップ173にて制御手段(IC)が内蔵するタイマにより所定時間経過したか否か判断し、所定時間が経過すると一連の動作過程を終了する(ステップ174)。
【0045】
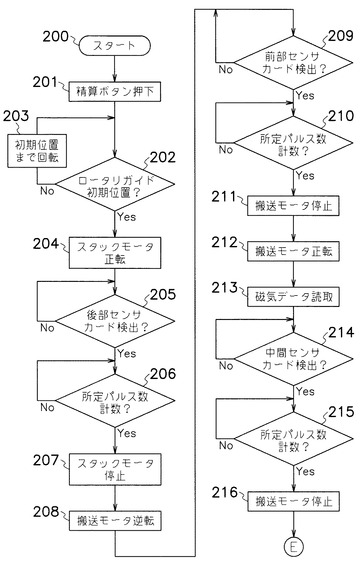
図38〜図42は、保管手段(51)内に収容されるカード(70)を入口(4)に払い出す過程を示す。ステップ200からステップ201に進み、使用者が精算ボタンを押すと、ステップ202に進み、制御手段(IC)は、制御手段(IC)に接続される図示しないセンサの出力によりロータリガイド(19)が初期位置にあるか否かを判断する。ロータリガイド(19)が初期位置にないとき、制御手段(IC)は、スタックモータ(22)を駆動して、ロータリガイド(19)を初期位置に回転する(ステップ203)。ステップ202にてロータリガイド(19)が初期位置にあると、ステップ204にてスタックモータ(22)を正転し、ステップ205に進み、制御手段(IC)は、後部センサ(23)がカード(70)を検出したか否かを判断し、後部センサ(23)がカード(70)を検出すると、ステップ206に進み、ロータリエンコーダが所定パルス数を計数したか否かを判断する。所定パルス数を計数すると、ステップ207にてスタックモータ(22)を停止し、搬送モータ(30)を逆転する。続いて、ステップ209にて、制御手段(IC)は、前部センサ(9)がカード(70)を検出したか否か判断し、前部センサ(9)がカード(70)を検出する検出信号を制御手段(IC)に送出すると、ステップ206にてロータリエンコーダが所定のパルス数を計数したか否か判断する。所定のパルス数を計数すると、ステップ207にてスタックモータ(22)を停止し、ステップ208にて搬送モータ(30)を逆転する。更に、ステップ209にて前部センサ(9)がカード(70)を検出したか否か判断し、カード(70)を検出すると、ステップ210にてロータリエンコーダが所定パルス数を計数したか否か判断する。所定パルス数を計数すると、ステップ211にて搬送モータ(30)を停止し、ステップ212にて搬送モータ(30)を正転し、ステップ213にて磁気ヘッド(50)が磁気データを読み取る。その後、ステップ214にて制御手段(IC)は、中間センサ(10)がカード(70)を検出したか否か判断し、中間センサ(10)の検出信号を受信する制御手段(IC)がカード(70)を中間センサ(10)が検出したことを確認したときに、ステップ215にて制御手段(IC)は、ロータリエンコーダが所定パルス数を計数したか否か判断する。所定パルス数を計数したとき、制御手段(IC)は、ステップ216にて搬送モータ(30)を停止し、ステップ217にて磁気カウンタが所定数以下か否か判断する。
【0046】
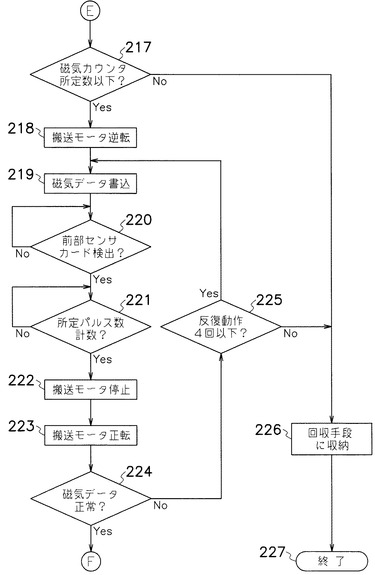
ステップ217にて磁気カウンタが所定数以下でないとき、ステップ226に進み、カード(70)を回収手段(52)に収納した後、一連の動作過程を終了する(ステップ227)。ステップ217にて磁気カウンタが所定数以下のとき、ステップ218にて搬送モータ(30)を逆転し、ステップ219にて磁気データを書込む。続いて、ステップ220にて制御手段(IC)は、前部センサ(9)がカード(70)を検出したか否か判断し、カード(70)を検出すると、ステップ221にてロータリエンコーダが所定パルス数を計数したか否か判断する。所定パルス数を検出すると、ステップ222にて搬送モータ(30)を停止し、ステップ223にて搬送モータ(30)を正転した後、ステップ224にて制御手段(IC)は、磁気データが正常か否か判断する。磁気データが正常でないとき、ステップ225に進み反復動作が4回以下か否か判断し、反復動作が4回以下の場合は、ステップ219に戻り、反復動作が4に達すると、ステップ226に進む。ステップ224にて磁気データが正常なときは、ステップ228に進む。
【0047】
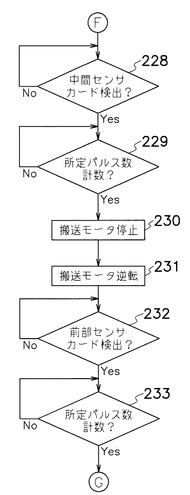
ステップ228では、制御手段(IC)は、中間センサ(10)がカード(70)を検出したか否か判断する。中間センサ(10)がカード(70)を検出して検出信号を制御手段(IC)に送出すると、ステップ229に進み、制御手段(IC)は、ロータリエンコーダが所定パルス数を計数したか否か判断する。所定パルス数を計数すると、ステップ230にて搬送モータ(30)を停止し、ステップ231にて搬送モータ(30)を逆転する。続いて、ステップ232にて前部センサ(9)がカード(70)を検出したか否か判断し、前部センサ(9)がカード(70)を検出すると、ステップ233にてロータリエンコーダが所定パルス数を計数したか否か判断する。所定パルス数を計数すると、ステップ234にえ搬送モータ(30)を停止し、搬送モータ(30)を正転する。
【0048】
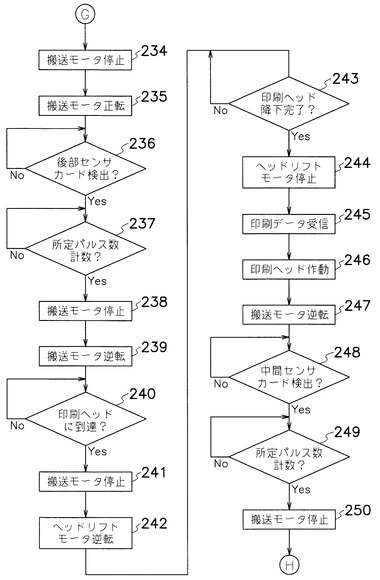
その後、ステップ236にて制御手段(IC)は、後部センサ(23)がカード(70)を検出したか否か判断し、後部センサ(23)が検出すると、制御手段(IC)は、ステップ237にてロータリエンコーダが所定パルス数を検出したか否か判断する。所定パルス数を検出すると、ステップ238にて搬送モータ(30)を停止し、ステップ239にて搬送モータ(30)を逆転する。更に、カード(70)が印刷ヘッド(46)に到達したか否か判断し、印刷ヘッド(46)に到達すると、ステップ241にて搬送モータ(30)を停止し、ヘッド保持モータ(45)を逆転する。続いて、制御手段(IC)は、印刷ヘッド(46)の降下を完了したか否か判断し、降下が完了すると、ステップ244に進み、ヘッド保持モータ(45)を停止し、ステップ245にて印刷手段(P)は、印刷データを受信し、制御手段(IC)は、ステップ246にて印刷ヘッド(46)を作動する。ステップ247では、制御手段(IC)は、搬送モータ(30)を逆転して、ステップ248では、中間センサ(10)がカード(70)を検出したか否か判断する。ステップ248では、ロータリエンコーダが所定パルス数を計数したか否か判断し、所定パルス数を計数すると、ステップ250に進み、搬送モータ(30)を停止する。
【0049】
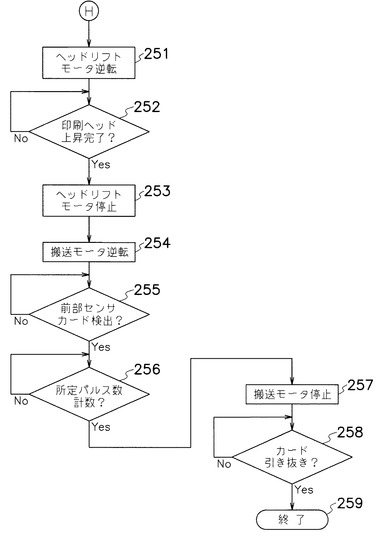
その後、ステップ251に進み、ヘッド保持モータ(45)を逆転し、ステップ252にて印刷ヘッド(46)の上昇が完了したか否か判断する。印刷ヘッド(46)が上昇を完了すると、ステップ253にてヘッド保持モータ(45)を停止し、ステップ254にて搬送モータ(30)を逆転する。その後、ステップ255にて制御手段(IC)は、前部センサ(9)がカード(70)を検出したか否か判断し、前部センサ(9)がカード(70)を検出する検出信号を制御手段(IC)に送出したとき、ステップ256に進み、制御手段(IC)は、ロータリエンコーダが所定パルス数を計数したか否か判断する。所定パルス数を検出すると、ステップ257にて制御手段(IC)は、搬送モータ(30)を停止し、ステップ258にて入口(4)からカード(70)が引き抜かれたか判断する。入口(4)からカード(70)が引き抜かれると、入口センサ(8)が引抜を検出するので、一連の動作過程が終了する(ステップ259)。
【0050】
本発明によるカード印刷装置及びカード印刷収納装置の実施の形態では、下記の作用効果を得ることができる。
(1) 使用に不適当なカード(70)を回収手段(52)に収納して、顧客に対して不適当なカードの払出しを阻止して、サービスを向上できる。
(2) 収納手段(7)に設けるディフレクタ(21)により保管手段(51)と回収手段(52)とに振り分けてカード(70)を収納するので、装置全体を小型化できる。
(3) 収納手段(7)に設けるロータリガイド(19)により収納手段(7)からカード(70)を確実に払出すことができる。
(4) カード印刷装置(1)に収納手段(7)を着脱自在に設けられるため、収納手段(7)へのカード(70)の補充と回収が容易となる。
(5) 磁気情報の読み書きが可能な磁気情報取扱手段(50)を搬送手段(T)に設けるので、使用回数等の情報を容易に管理することができる。
(6) 搬送通路(5)に設けるイメージセンサ(48,49)によりカード(70)のイメージデータを取り出して、カード(70)への落書きを検出することができる。
【0051】
本発明の前記実施の形態は、種々の変更が可能である。例えば、搬送通路(5)の両側に一対のイメージセンサ(48,49)を設けずに片側のみにイメージセンサを設けてもよい。印刷ヘッド(46)と消去ヘッド(47)とを個別に図示したが、印刷消去一体型のヘッドを使用してもよい。
【0052】
ゲーム機、紙幣鑑別機又は自動販売機内の制御装置若しくはコンピュータ等の外部制御装置に制御手段(IC)を接続して、外部制御装置から書込み指令又は消去指令を受信したとき、制御手段(IC)は、カード(70)に情報を書込み又は情報を消去してもよい。一対の第1のホルダ(16a)と第2のホルダ(16b)を使用する例を示したが、単一のホルダ(16)のみを使用してもよい。
【産業上の利用可能性】
【0053】
本発明は、ゲーム機等の遊技機器、紙幣鑑別機又は自動販売機等の省力機器に使用するカードに情報を再書込み可能に印刷し又は情報を消去するシステムに適用できる。
【図面の簡単な説明】
【0054】
【図1】本発明によるカード印刷収納装置の断面図
【図2】本発明によるカード印刷装置の搬送手段を示す斜視図
【図3】図1に示すカード印刷装置に装着する印刷ヘッドを移動するヘッドドライバの斜視図
【図4】図3に示すヘッドドライバを構成する駆動構造を示す平面図及び側面図
【図5】スタックローラの動力伝達手段を示す左方向斜視図
【図6】スタックローラの動力伝達手段を示す右方向斜視図
【図7】動力伝達手段に組み込まれる摩擦クラッチの断面図
【図8】ロータリガイド、カードを押圧する保持手段及びスタックローラの動力伝達手段を示す斜視図
【図9】保持手段の斜視図
【図10】ロータリガイドを除去した図8に示す保持手段と動力伝達手段を示す斜視図
【図11】ロータリガイドを一方向に回転する状態にあるカードを押圧する保持手段及びスタックローラの動力伝達手段を示す平面図及び側面図
【図12】ロータリガイドを他方向に回転する状態にあるカードを押圧する保持手段及びスタックローラの動力伝達手段を示す平面図及び側面図
【図13】ロータリガイドの駆動装置を示す左方向の斜視図
【図14】ロータリガイドの駆動装置を示す右方向の斜視図
【図15】ロータリガイドの駆動装置を示す平面図及び側面図
【図16】一方向にロータリガイドを回転して、カードを保管手段に収納する駆動装置を示す側面図
【図17】他方向にロータリガイドを回転して、カードを回収手段に収納する駆動装置を示す側面図
【図18】一方向にロータリガイドを回転して、カードを保管手段から排出する駆動装置を示す側面図
【図19】他方向にロータリガイドを回転して、カードを回収手段から排出する駆動装置を示す側面図
【図20】下位置に移動したホルダを示す収納手段の断面図
【図21】上位置に移動したホルダを示す収納手段の断面図
【図22】ホルダを下位置に移動した収納手段の断面図
【図23】保管手段にカードを収納する状態を示す収納手段の断面図
【図24】図23に示す状態でカードを保管手段に搬送する収納手段の断面図
【図25】ホルダを上位置に移動した収納手段の断面図
【図26】回収手段にカードを収納する状態を示す収納手段の断面図
【図27】図26に示す状態でカードを回収手段に搬送する収納手段の断面図
【図28】ホルダを下位置にホルダを移動した収納手段の断面図
【図29】保管手段からカードを排出する状態を示す収納手段の断面図
【図30】一方のガイドを回転して、保管手段からカードを排出する状態を示す収納手段の断面図
【図31】図30の状態から後続のカードの排出を阻止する状態を示す収納手段の断面図
【図32】本発明によるカード印刷収納装置の第1の動作過程を示すフローチャート
【図33】本発明によるカード印刷収納装置の第2の動作過程を示すフローチャート
【図34】本発明によるカード印刷収納装置の第3の動作過程を示すフローチャート
【図35】本発明によるカード印刷収納装置の第4の動作過程を示すフローチャート
【図36】本発明によるカード印刷収納装置の第5の動作過程を示すフローチャート
【図37】本発明によるカード印刷収納装置の第6の動作過程を示すフローチャート
【図38】本発明によるカード印刷収納装置の第7の動作過程を示すフローチャート
【図39】本発明によるカード印刷収納装置の第8の動作過程を示すフローチャート
【図40】本発明によるカード印刷収納装置の第9の動作過程を示すフローチャート
【図41】本発明によるカード印刷収納装置の第10の動作過程を示すフローチャート
【図42】本発明によるカード印刷収納装置の第11の動作過程を示すフローチャート
【図43】本発明のカード印刷収納装置を構成するカード印刷装置から収納手段を分離する状態を示す断面図
【図44】本発明のカード印刷収納装置に使用する電気制御システムを示すブロック図
【符号の説明】
【0055】
(1)・・カード印刷装置、 (4)・・入口、 (5)・・搬送通路、 (7)・・収納手段、 (8)・・入口センサ、 (9)・・前部センサ、 (10)・・中間センサ、 (11)・・保持モータ、 (13)・・第1のベルクランク、 (14)・・第2のベルクランク、 (15)・・ガイド、 (16a)・・第1のホルダ、 (16b)・・第2のホルダ、 (17)・・第1のレバー、 (18)・・第2のレバー、 (19)・・ロータリガイド、 (20)・・スタックローラ、 (21)・・ディフレクタ、 (22)・・スタックモータ、 (23)・・後部センサ、 (24,27a)・・入口ローラ、 (25,27b)・・中間ローラ、 (26,27c)・・後部ローラ、 (30)・・搬送モータ、 (45)・・ヘッドドライバ、 (46)・・印刷ヘッド、 (47)・・消去ヘッド、 (48,49)・・イメージセンサ、 (50)・・磁気ヘッド、 (51)・・保管手段、 (52)・・回収手段、 (70)・・カード、 (C)・・搬送装置、 (D)・・駆動手段、 (F)・・動力伝達手段、 (G)・・ガイド装置、 (H)・・保持手段、 (IP)・・制御手段、 (L)・・リンク装置、 (P)・・印刷手段、 (R)・・読出手段、 (RD)・・回転ガイド装置、 (SR)・・スタックローラ装置、 (T)・・搬送手段、
【技術分野】
【0001】
本発明は、書き換え可能にカードに情報を印刷できるカード印刷装置及びカード印刷収納装置に関連する。
【背景技術】
【0002】
印字と消去を反復できる感熱式リーダライターは、ロイコ染料と顕色剤との相互作用を応用する。可逆性顕色剤を用いて、加熱温度と冷却時間を制御して、発色と消去のリライト特性を実現する。例えば、染料と顕色剤の融点(例えば、約170℃)以上の温度をかけると、印字層中に存在する染料と顕色剤は、溶け合う状態となり、この状態で急激に冷却すると染料と顕色剤とが混合しまま結晶化して発色状態を保つことができる。一方、融点以上の温度から徐々に冷却すると、染料と顕色剤が個別に結晶化して発色状態が保持されず、消色状態になる。また、染料と顕色剤の融点以下でもある一定時間の加熱により染料と顕色剤が徐々に分離して結晶化し、消色状態となる温度域(大体120〜140℃)がある。つまり、染料と顕色剤の混合物の結晶化過程を制御して、感熱式リーダライターの印字と消去を選択することができる。印字は感熱ヘッドを使用するが、消去には種々の方法がある。
【0003】
下記特許文献1は、印字部に対する挿入方向が規定される単葉の印字媒体を堆積状態に収納する印字媒体収納手段と、印字媒体を印字部へ搬送する搬送手段と、印字部に対する印字媒体の印字面が規定され、且つ印字媒体の印字面での印字媒体搬送方向に対する前後左右方向が規定された印字媒体の印字部に対する前後左右方向の挿入方向を判別する印字媒体挿入方向判別手段と、印字部を制御して、判別手段の判別結果に対応した印字内容を印字媒体に印字させる印字制御手段とを設けた印字装置を示す。
【0004】
特許文献2は、スロットマシンにチケットを発行するプリンタを搭載したコインレススロットシステムを開示する。特許文献2にはコインレスシステムとして、クーポン券を発行することにより、硬貨の払出しを省略して、カジノ運用面での滞留現金を大幅に削減でき、一般に広く普及している。しかしながら、紙を使用するクーポン券は、プレイするゲーム機を替える毎又精算毎にチケットを発行する必要があるため、使用するチケット枚数が膨大となり、コストダウンを図ることができない。
【0005】
【特許文献1】特許2796021号公報
【特許文献2】米国特許第6048269号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
一方、同様な問題がパチンコ市場にもあり、記録媒体を再発行できる特許文献2に示される装置又は特許文献3に示される記録媒体も提案される。しかしながら、従来の記録媒体の変更には、発行装置自体の変更と共に、発行装置を搭載するゲーム機自体の大幅な設計変更が必要となり、発行装置の搭載空間を確保する必要もあり、装置全体の小型化が要望されていた。
【0007】
本発明は、カードに記録されて読み出した情報に基づいてカードに新たに情報を消去可能に書き込み又はカードに記録される情報を消去するカード印刷装置を提供することを目的とする。本発明は、カードに記録されて光学的又は磁気的に読み出した情報に基づいてカードに新たに情報を消去可能に書き込み又はカードに記録される情報を消去するカード印刷装置を提供することを目的とする。本発明は、外部制御装置からの指令信号に基づいてカードに新たに情報を消去可能に書き込み又はカードに記録される情報を消去するカード印刷装置を提供することを目的とする。本発明は、所定の情報のみを消去可能に書き込み又はカードに記録される情報を消去するカード印刷装置を提供することを目的とする。本発明は、カードを収納できる収納手段を前記カード印刷装置に設けたカード印刷収納装置を提供することを目的とする。本発明は、収納手段からカードを取り出して所定の情報を消去可能に印刷して発行するカード印刷収納装置を提供することを目的とする。本発明は、所定の情報を含まないカードを収納手段に保存するカード印刷収納装置を提供することを目的とする。本発明は、選択的にカードに情報を印刷し又はカードに印刷される情報を消去して、カードを保存できる収納手段を有するカード印刷収納装置を提供することを目的とする。本発明は、従来のゲーム機及び管理システムの変更を最小減に抑制しかつカードを確実に再利用して装置の小型化を図れるカード印刷装置及びカード印刷収納装置を提供することにある。
【課題を解決するための手段】
【0008】
本発明のカード印刷装置は、一端に入口(4)が設けられる搬送通路(5)に沿ってカード(70)を搬送する搬送手段(T)と、搬送通路(5)に設けられて搬送通路(5)に沿って搬送されるカード(70)に記録された情報を読み出す読出手段(R)と、カード(70)の表面に情報を記録しかつ記録された情報を消去する記録消去可能な印刷手段(P)と、搬送手段(T)、読出手段(R)及び印刷手段(P)に接続されかつ読出手段(R)から送出される情報に基づいて、カード(70)の表面に情報を記録し又はカード(70)の表面に記録された情報の消去を決定して、搬送手段(T)及び印刷手段(P)の動作を制御する制御手段(IC)とを備える。入口(4)に挿入されるカード(70)を搬送手段(T)により搬送通路(5)に沿って移動しながら、読出手段(R)によりカード(70)に記録された情報を読み出して、制御手段(IC)に読み出した情報を送信すると、制御手段(IC)は、読み出した情報に基づいてカード(70)に書き込み可能に情報を印刷し又はカードに印刷された情報を消去する。本発明では、「カード」は、紙製、樹脂製又は紙と樹脂とを積層若しくは混合した券又はクーポン等の小片をいう。
【発明の効果】
【0009】
本発明のカード印刷装置及びカード印刷収納装置により、遊技場での券、運搬手段への乗車券、搭乗券又はパス、カジノ(賭博場)、マーケット又はデパートでのクーポン券等での反復使用可能なカードとして使用できるため、一回のみ使用される紙又は樹脂の使用量を低減して、資源を節約することができる。
【発明を実施するための最良の形態】
【0010】
本発明によるカード印刷装置とカード印刷収納装置の実施の形態を図1〜図44について説明する。
図1に示すように、本発明のカード印刷収納装置は、カード印刷装置(1)と、カード印刷装置(1)に対して着脱自在に装着される収納手段(7)とを備える。カード印刷装置(1)は、一端に入口(4)が設けられる搬送通路(5)に沿ってカード(70)を搬送する搬送手段(T)と、搬送通路(5)に設けられて搬送通路(5)に沿って搬送されるカード(70)に記録された情報を読み出す読出手段(R)と、カード(70)の表面に情報を記録しかつ記録された情報を消去する記録消去可能な印刷手段(P)と、
搬送手段(T)、読出手段(R)及び印刷手段(P)に接続されかつ読出手段(R)から送出される情報に基づいて、カード(70)の表面に情報を記録し又はカード(70)の表面に記録された情報の消去を決定して、搬送手段(T)及び印刷手段(P)の動作を制御する制御手段(IC)(図44)とを備える。
【0011】
搬送手段(T)は、搬送通路(5)の入口(4)に挿入されるカード(70)を検出して検出信号を制御手段(IC)に発生する入口センサ(8)と、入口センサ(8)の検出信号を受信する制御手段(IC)により駆動されてカード(70)を搬送通路(5)に沿って移動する搬送装置(C)とを備える。搬送装置(C)は、搬送モータ(30)と、搬送モータ(30)に駆動連結される種々の複数の歯車、複数のベルト、複数のローラ及びそれらの関連部品を含む。例えば、搬送手段(T)は、入口センサ(8)の後方で搬送通路(5)に対向して配置される一対の入口ローラ(24,27a)と、入口ローラ(24,27a)の後方で搬送通路(5)に配置されてカード(70)の通過を検出する前部センサ(9)と、前部センサ(9)の後方で搬送通路(5)に対向して配置される一対の中間ローラ(25,27b)と、中間ローラ(25,27b)の後方で搬送通路(5)に配置されてカード(70)の通過を検出する中間センサ(10)と、中間センサ(10)の後方で搬送通路(5)に対向して配置される一対の後方ローラ(26,27c)と、後方ローラ(26,27c)の後方で搬送通路(5)に対向して配置される後方センサ(23)と、後方ローラ(26,27c)の後段に互いに独立して駆動される一対のフラップ(59a,59b)と、収納手段(7)内に回転可能に設けられるロータリガイド(19)を含む回転ガイド装置(RD)と、収納手段(7)内に回転可能に設けられるスタックローラ(20)を含むスタックローラ装置(SR)と、収納手段(7)内に揺動可能に設けられるディフレクタ(21)を含むガイド装置(G)とを備える。カード印刷装置(1)に対して収納手段(7)の保管手段(51)と回収手段(52)とを個別に着脱自在に取り付ける状態を図43に示す。
【0012】
読出手段(R)は、カード(70)に磁気により記録又は印刷される情報を検出する磁気ヘッド(50)若しくはホールセンサ又はこれらの組合せによる磁気センサと、カード(70)に着色されて記録又は印刷される情報を光学的に読み出すイメージセンサ(48,49)、ホトカプラ若しくはCCDカメラ又はこれらの組合せによる光学センサとを含む。
【0013】
記録消去可能に情報を印刷できる印刷手段(P)は、搬送通路(5)に沿って配置されて部分的に加熱することによりカード(70)に情報を印刷する感熱式の印刷ヘッド(46)と、搬送通路(5)に接近する印刷位置と、搬送通路(5)から離間する休止位置との間で印刷ヘッドを移動するヘッドドライバ(45)と、搬送通路(5)に沿って配置され部分的に加熱することによりカード(70)から情報を消去する感熱式の消去ヘッド(47)とを備える。
【0014】
図3は印刷手段(P)の斜視図であり、図4(A)は、印刷手段(P)の平面図、図4(B)は、サーマルヘッド(46)が下位置に移動した状態を示す側面図、図4(C)は、サーマルヘッド(46)が上位置に移動した状態を示す側面図である。印刷手段(P)は、ヘッド保持モータ(ヘッドドライバ)(45)と、ヘッド保持モータ(45)の出力軸に固定された歯車(62a)と、回転可能に支持されて歯車(62a)に噛合う歯車(62b,62c)を介してサーマルヘッドカム軸(65a)に固定される歯車(62d)と、サーマルヘッドカム軸(65a)に固定されるプリントヘッドカム(63a)と、プリントヘッドカム(63a)の外周に当接するプリントヘッド受けカラー(67a)とを備える。従って、ヘッド保持モータ(45)及びプリントヘッドカム(63a)の回転により、プリントヘッドカラー(67a)が垂直方向の上下運動を行う。プリントヘッド受けカラー(67a)は、図示しないスプリング等の弾性偏倚装置によりプリントヘッドカム(63a)に常時接触するように付勢される。プリントヘッドカラー(67a)には、サーマルヘッド(46)の一端が固定されるので、プリントヘッドカラー(67)の垂直移動に伴い、サーマルヘッド(46)は、搬送通路(5)を通過するカード(70)に接触する図4(B)に示す下位置と、カード(70)から離間する図4(C)に示す上位置との間で移動して、図34のステップ135に示すように、動作する。下位置にあるサーマルヘッド(46)は、サーマルセンサ(88)により検出され、サーマルセンサ(88)の検出信号は、制御手段(IC)に送出される。
【0015】
また、印刷手段(P)は、サーマル保持モータ(45)に駆動連結される歯車(62d)に更に駆動連結される歯車(62e,62f,62g)と、一端に歯車(62g)を固定するイレースヘッドシャフト(65b)と、イレースヘッドシャフト(65b)の他端に固定されるイレースヘッドカム(63b)と、イレースヘッドカム(63b)の外周に当接するイレースヘッド受けカラー(67b)と、イレースヘッド受けカラー(67b)に一端が固定されるイレースヘッド(47)とを備える。プリントヘッド受けカラー(67b)は、図示しないスプリング等の弾性偏倚装置によりイレースヘッドカム(63b)に常時接触するように付勢される。従って、サーマル保持モータ(45)の回転により、イレースヘッドカム(63b)が回転されて、イレースヘッド(47)は、搬送通路(5)を通過するカード(70)に接触する下位置と、カード(70)から離間する上位置との間で垂直方向の上下移動を行う。下位置にあるイレースヘッド(47)は、イレースセンサ(89)により検出され、イレースセンサ(89)の検出信号は、制御手段(IC)に送出される。従って、サーマル保持モータ(45)の正転により、例えば図4(B)に示すように、サーマルヘッド(46)が下位置にあるとき、イレースヘッド(47)は、上位置となり、カード(70)への書込みが可能となる。これに対し、サーマル保持モータ(45)が逆転すると、図4(C)に示すように、サーマルヘッド(46)が上位置となり、イレースヘッド(47)が下位置となるとき、カード(70)への消去が可能になる。印刷手段(P)の詳細な動作を図34のステップ129以下に説明する。
【0016】
図11及び図12に示すように、保持手段(H)を構成してカード印刷装置(1)内に配置される保持モータ(11)の駆動軸(11a)にディスク(11b)が固定され、ディスク(11b)には偏心ピン(11c)が固定される。偏心ピン(11c)には、コンロッド(12)の一端が軸着され、コンロッド(12)の他端は、軸(12a)により第1のベルクランク(13)の一端に軸着される。第1のベルクランク(13)は、軸(13a)の一端に回転可能に軸着され、第1のベルクランク(13)の他端は、軸(13b)を介して第1のレバー(17)の一端に軸(13b)で軸着される。第1のレバー(17)は、軸(131)の周りに回転可能に軸着され、第1のレバー(17)の他端には、歯車(38)が回転可能に軸(38)に軸着される。水平に延伸する軸(13a)の他端には、第2のベルクランク(14)が軸(13a)と一体回転可能に固定される。第2のベルクランク(14)の端部は、軸(14a)により第2のレバー(18)に軸着され、第2のレバー(18)は、軸(131)の周りに回転可能に軸着され、第2のレバー(18)の他端には、歯車(35)が軸(18a)により回転可能に軸着される。
【0017】
保持モータ(11)の正転により、コンロッド(12)が保持モータ(11)に接近する方向に移動すると、図11に示すように、第1のベルクランク(13)は、軸(13a)の周りに時計方向に回転するので、第1のレバー(17)は、反時計方向に回転して、歯車(38)は、ロータリガイド(19)の一端に固定された歯車(39)から離脱して離間する方向に移動する。同時に、軸(13a)に固定される第2のベルクランク(14)は、時計方向に回転するので、第2のレバー(18)は、反時計方向に回転し、歯車(35)は、ロータリガイド(19)の他端に固定された歯車(36)に接近して、噛合う。第1のベルクランク(13)の時計方向の回転により軸(13b)は、上方に移動するので、軸(13b)に固定された第1のホルダ(16a)は、ガイド(15)に沿って上位置に上昇する。同時に、第2のベルクランク(14)の時計方向の回転により軸(14b)は、上位置に移動するので、軸(14b)に固定される第2のホルダ(16b)は、ガイド(15)に沿って上位置に上昇する。第1のホルダ(16a)と第2のホルダ(16b)とを統合して、必要に応じてホルダ(16)として説明する。
【0018】
保持モータ(11)の逆転により、コンロッド(12)が保持モータ(11)から離間する方向に移動すると、図12に示すように、第1のベルクランク(13)は、軸(13a)の周りに反時計方向に回転するので、第1のレバー(17)は、時計方向に回転して、歯車(38)は、ロータリガイド(19)の一端に固定された歯車(39)に接近して噛合う。同時に、軸(13a)に固定される第2のベルクランク(14)は、反時計方向に回転するので、第2のレバー(18)は、時計方向に回転し、歯車(35)は、ロータリガイド(19)の他端に固定された歯車(36)から離脱して離間する方向に移動する。第1のベルクランク(13)の反時計方向の回転により軸(13b)は、下方に移動するので、軸(13b)に固定された第1のホルダ(16a)は、ガイド(15)に沿って下位置に下降する。同時に、第2のベルクランク(14)の反時計方向の回転により軸(14b)は、下方に移動するので、軸(14b)に固定された第2のホルダ(16b)は、ガイド(15)に沿って下位置に下降する。ディスク(11b)、コンロッド(12)、第1のベルクランク(13)、第2のベルクランク(14)、第1のレバー(17)及び第2のレバー(18)は、リンク装置(L)を構成する。
【0019】
図8に示すロータリガイド(19)とスタックローラ(20)の駆動方法について説明する。スタックモータ(22)の出力軸には、減速装置(122)が固定され、減速装置(122)の回転力は、歯車(31,32,33)を介して軸(131)に固定された歯車(34)に伝達される。また、軸(131)には、第2のレバー(18)が揺動可能に軸支され、第2のレバー(18)の一端は、第2のホルダ(16b)を支持する軸(14b)に回転可能に軸着され、第2のレバー(18)の他端に設けられる軸(18a)には、歯車(35)が軸支され、歯車(34)の回転力が歯車(35)に伝達される。
【0020】
ロータリガイド(19)は、図示しないワンウエイクラッチを介して軸(130)に固定され、軸(130)の一端に歯車(36)が固定される。第2のホルダ(16b)が図11に示す下位置にあるとき、第2のレバー(18)が軸(131)の周りに下方に揺動して、歯車(35)は、歯車(36)に駆動接続される。このとき、第1のベルクランク(13)は、時計方向に回転するので、第1のレバー(17)は、軸(131)の周りに反時計方向に回転するので、図11に示すように、軸(17a)で第1のレバー(17)に取り付けられる歯車(38)は、歯車(39)から離間して、係合が解除される。逆に、第2のホルダ(16b)が図12に示す上位置にあるとき、第2のレバー(18)が軸(131)の周りに上方に揺動して、歯車(35)は、歯車(36)との係合が解除される。このとき、第1のベルクランク(13)は、反時計方向に回転するので、第1のレバー(17)は、軸(131)の周りに時計方向に回転するので、図12に示すように、軸(17a)で第1のレバー(17)に取り付けられる歯車(38)は、歯車(39)に接近して、係合される。即ち、図11に示すように、第1のホルダ(16a)と第2のホルダ(16b)が上位置にあるとき、歯車(35)の回転力は、歯車(36)に伝達されるが、歯車(38)は、歯車(39)から分離される。逆に、図12に示すように、第1のホルダ(16a)と第2のホルダ(16b)が下位置にあるとき、歯車(35)は、歯車(36)から分離されるが、歯車(38)の回転力は、歯車(39)に伝達される。
【0021】
図7に示すように、軸(44)上に回転可能に取り付けられる歯車(40)の摩擦面(40a)と歯車(41)の摩擦面(41a)との間に摩擦クラッチ(FC)が形成される。軸(44)のフランジ(44a)と歯車(41)との間にスプリング(付勢部材)(43)が配置され、歯車(41)は、歯車(40)に対して常時一定の押圧力で付勢される。従って、通常の状態では、歯車(33)から回転力を受ける歯車(40)は、スプリング(43)の弾力により歯車(41)に摩擦係合し、歯車(41)と一体に回転して、歯車(33)の回転力を歯車(41)に伝達する。しかしながら、歯車(41)の回転に対してスプリング(43)による摩擦力を超える抵抗力が発生すると、摩擦クラッチ(FC)は、歯車(40)の摩擦面(40a)と歯車(41)の摩擦面(41a)との間で滑りが発生して、歯車(41)の回転が阻止される。
【0022】
図16に示すように、歯車(33)は、軸(44)上で回転する歯車(40)に連結し、歯車(40)は、摩擦クラッチ(FC)を介して歯車(41)に駆動連結され、歯車(41)は、軸(131)に軸支される歯車(42)に噛合い、歯車(42)の一側面にディフレクタ(21)が固定される。
【0023】
ロータリガイド(19)とスタックローラ(20)の回転について説明すると、軸(131)の他端には、歯車(37)が固定されると同時に、第1のレバー(17)が揺動可能に軸支され、図9に示すように、第1のレバー(17)の一端は、軸(13b)により第1のベルクランク(13)に軸着されると共に、第1のレバー(17)の他端は、歯車(38)が軸(17a)により回転可能に取り付けられる。軸(13b)には、第1のホルダ(16a)が一体移動可能に取り付けられる。歯車(38)は、第1のホルダ(16a)が上位置にあるとき、歯車(39)に噛合い、歯車(38)の回転力が歯車(39)に伝達される。歯車(39)は、図示しないワンウエイクラッチを介してロータリガイド(19)に伝達される。この構成により、ロータリガイド(19)は、第1のホルダ(16a)が上位置にあるとき、歯車(35)から歯車(36)に回転力が伝達され、スタックモータ(22)の駆動力がロータリガイド(19)に伝達される。第1のホルダ(16a)が下位置のとき、スタックモータ(22)の駆動力は、ロータリガイド(19)に伝達されない。スタックモータ(22)の回転力は、歯車(31,32,33,34)を介して軸(131)に伝達され、歯車(34)に固定された軸(131)に固定されたスタックローラ(20)に伝達される。スタックモータ(22)の回転力をスタックローラ(20)に伝達する複数の歯車は、動力伝達手段(F)を構成する。
【0024】
スタックモータ(22)の回転力が歯車(31,32,33,40)、摩擦クラッチ(FC)、歯車(41)に伝達され、歯車(41)から歯車(42)に伝達され、歯車(42)に固定されたディフレクタ(21)に伝達される。歯車(42)の回転により、ディフレクタレバー(21a)が揺動するので、ディフレクタレバー(21a)と一体にディフレクタ(21)が揺動する。ディフレクタ(21)が一定角度回転すると、ディフレクタ(21)が図示しないストッパに当接して、摩擦クラッチ(FC)に滑りが発生し、ディフレクタ(21)のそれ以上の回転が阻止される。ディフレクタ(21)が逆方向に回転するときも、ディフレクタ(21)が逆方向に一定角度回転すると、ディフレクタ(21)は、図示しないストッパに当接して、摩擦クラッチ(FC)に滑りが発生して、ディフレクタ(21)のそれ以上の回転が阻止される。
【0025】
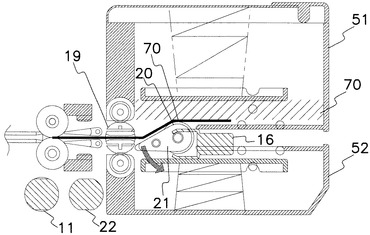
保管手段(51)内にカードを収納する動作を図16について説明する。
図16に示すように、スタックモータ(22)が反時計方向に回転すると、歯車(31)は、反時計方向、歯車(32)は、時計方向、歯車(33)は、反時計方向、歯車(34)は、時計方向に回転する。このとき、スタックローラ(20)は、歯車(34)に固定された軸(131)と一体に時計方向に回転するが、ディフレクタ(21)が図示しないストッパに当接して、摩擦クラッチ(FC)に滑りが発生し、ディフレクタ(21)のそれ以上の回転が阻止される。このとき、図12に示すように、第1のホルダ(16a)と第2のホルダ(16b)は、下位置にあるので、歯車(35,36)の噛合いが離間し、歯車(38,39)が噛合う。図示しないワンウエイクラッチの作用により、歯車(39)の回転力は、ロータリガイド(19)には伝達されず、スリット(19a)を水平位置に保持する状態で、ロータリガイド(19)は、停止する。このとき、スタックモータ(22)と共に歯車(31)が反時計方向、歯車(32)が時計方向、歯車(33)が反時計方向、歯車(40)が時計方向、歯車(42)を介して歯車(42)が反時計方向に回転するため、図23に示すように、ディフレクタ(21)は、下方向に回転される。
【0026】
このとき、図1に示す入口(4)に挿入されるカード(70)は、後方ローラ(26,27c)間及びフラップ(59a,59b)間を通り、ロータリガイド(19)のスリット(19a)内に搬送される。搬送ローラ(27c,26)で搬送されるカード(70)の先端がロータリガイド(19)のスリット(19a)を通過すると、図24に示すように、カード(70)は、下位置にあるディフレクタ(21)の上面に沿い右斜め上方に押し上げられる。カード(70)が更に奥に搬送されると、カード(70)の先端がスタックローラ(20)と接触し、スタックローラ(20)の回転力によりカード(70)は、保管手段(51)の奥に搬送されて、カード(70)の後端が後部センサ(23)を通過し、所定パルス計数後に、スタックモータ(22)は、停止され、保管手段(51)への収納を終了する。
【0027】
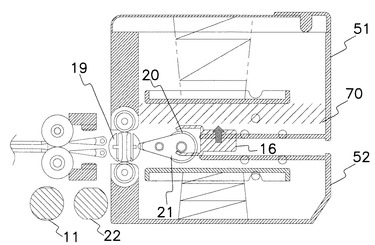
回収手段(52)内にカードを収納する動作を図17、図26及び図27について説明する。図17に示すように、スタックモータ(22)が時計方向に回転すると、歯車(31)に噛合う歯車(32)は、反時計方向、歯車(32)に噛合う歯車(33)は、時計方向、歯車(33)に噛合う歯車(34)は、反時計方向に回転し、歯車(34)の回転力は、軸(131)を介してスタックローラ(20)の反時計方向の回転に伝達される。このとき、第1のホルダ(16a)及び第2のホルダ(16b)は、上位置にあるため、歯車(34)の反時計方向の回転駆動力は、歯車(35)に時計方向に伝達され、歯車(35)の回転駆動力が歯車(36)の反時計方向の回転駆動力に伝達される。このとき、歯車(36)の回転力は、ワンウエイクラッチの作用により遮断されて、ロータリガイド(19)は、スリット(19a)が水平にある状態で回転停止する。スタックモータ(22)の時計方向の回転が歯車(31)を介して歯車(32)の反時計方向、歯車(32)に噛合う歯車(33)は、時計方向、歯車(33)に噛合う歯車(40)は、反時計方向に回転し、歯車(40)の回転は、摩擦クラッチ(FC)を介して歯車(41)に伝達され、反時計方向に回転する歯車(41)の回転力が歯車(42)に伝達され、図26及び図27に示すように、ディフレクタ(21)が上位置に揺動される。
【0028】
搬送ローラ(27c,26)間に挟持されるカード(70)は、フラップ(59a,59b)間及びロータリガイド(19)のスリット(19a)内を通過する。カード(70)の先端は、ディフレクタ(21)に当接して、カード(70)の先端は、右斜め下方に案内される。カード(70)の先端がスタックローラ(20)に到達すると、反時計方向に回転するスタックローラ(20)の回転力がカード(70)に伝達され、カード(70)が回収手段(52)の奥に搬送される。カード(70)の後端が後部センサ(23)を通過した後、所定パルスを計数した後にスタックモータ(22)の回転は、停止する。
【0029】
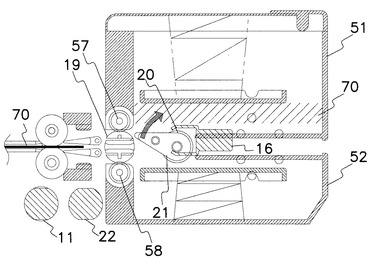
保管手段(51)からカード(70)を排出するとき、使用者が図示しない精算ボタンを操作すると、図18でスタックモータ(22)は、時計方向に回転し、歯車(31)が時計方向、歯車(31)に噛合う歯車(32)が反時計方向、歯車(32)に噛合う歯車(33)が時計方向、歯車(33)に噛合う歯車(34)は、反時計方向、歯車(34)を固定する軸(131)を介してスタックローラ(20)が反時計方向に回転する。軸(131)に固定される歯車(37)は、反時計方向に回転し、歯車(37)に噛合う歯車(38)は、時計方向に回転する。このとき、第1のホルダ(16a)と第2のホルダ(16b)は、下位置にあるので、第2のレバー(18)が下方に揺動して、歯車(35)と歯車(36)の係合が解除される。第1のレバー(17)を介して歯車(38)は、歯車(39)に噛合う。歯車(37)の回転により、歯車(38)は、時計方向に回転し、歯車(39)は、反時計方向に回転する。歯車(39)の回転力は、ロータリガイド(19)の反時計方向の回転として伝達される。
【0030】
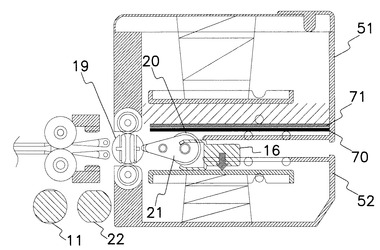
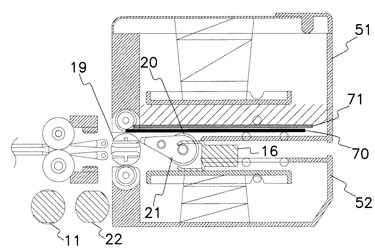
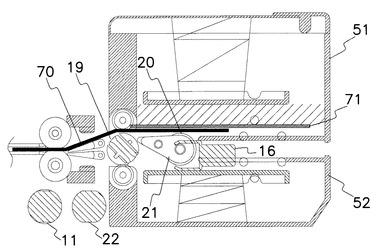
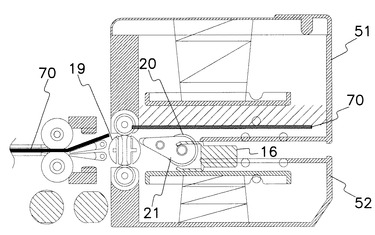
スタックモータ(22)の時計方向の回転により、歯車(31)は、時計方向、歯車(31)に噛合う歯車(32)は、反時計方向、歯車(32)に噛合う歯車(33)は、時計方向、歯車(33)に噛合う歯車(40)は、反時計方向に回転する。歯車(40)の回転は、摩擦クラッチ(FC)を介して歯車(41)の回転に伝達される。歯車(41)に噛合う歯車(42)は、時計方向に回転し、歯車(41)の回転に伴いディフレクタ(21)は、図29に示す上位置に移動する。このとき、図29に示すように、第1のホルダ(16a)と第2のホルダ(16b)は、下位置にあるので、保管手段(51)内に収容される最下部のカード(70)の底面は、スタックローラ(20)に接触する。スタックローラ(20)が反時計方向に回転すると、スタックローラ(20)に接触するカード(70)は、ロータリガイド(19)に向かって繰出される。このとき、ディフレクタ(21)の位置が上位置にあるので、カード(70)の先端は、ロータリガイド(19)の外周に沿ってロータリガイド(19)に接触する上部ガイドローラ(57)方向に搬送され、ロータリガイド(19)と上部ガイドローラ(57)との間に挟持されるカード(70)は、更に入口(4)に向かって搬送され、上部フラップ(59a)を押し下げならが、搬送ローラ(27c,26)間に挟持され、更に入口(4)方向に搬送される。
【0031】
回収手段(52)からカード(70)を排出するとき、図示しないが、第1のホルダ(16a)及び第2のホルダ(16b)は、上位置にあり、回収手段(52)内に収容される最上位置のカード(70)の上面は、スタックローラ(20)に接触する。スタックローラ(20)が時計方向に回転すると、カード(70)は、ロータリガイド(19)方向に繰出される。そのとき、ディフレクタ(21)は、下方向にあり、カード(70)の先端は、ロータリガイド(19)の外周と下部ガイドローラ(58)との間に挟持され、ロータリガイド(19)の時計方向の回転により、カード(70)の先端は、ロータリガイド(19)と下部ガイドローラ(58)との間に挟持され、入口(4)方向に搬送される。このとき、カード(70)の先端は、下部フラップ(59b)を押し上げながら、搬送ローラ(27c,26)間に挟持され、入口(4)に向かって搬送される。
【0032】
スタックモータ(22)と保持モータ(11)との組み合わせにより、4つの制御、即ち、保管手段(51)からのカード(70)の繰り出し(図16)、回収手段(52)へのカード(70)の回収(図17)、保管手段(51)へのカード(70)の回収(図18)、回収手段(52)からのカード(70)の繰り出し(図19)が行われる。
【0033】
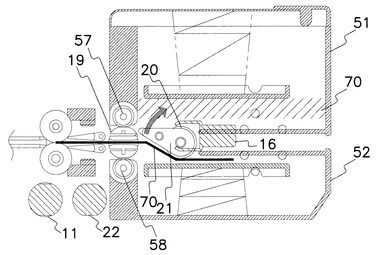
図30では、保管手段(51)からのカード(70)の繰出しが行われる。図16に示すように、スタックモータ(22)は、正転(時計方向)に回転し、第1のホルダ(16a)と第2のホルダ(16b)の位置が下位置の場合、歯車(35)と歯車(36)の駆動が遮断され、歯車(38)と歯車(39)の駆動が連結される。歯車(31)が時計方向、歯車(32)が反時計方向、歯車(33)が時計方向、歯車(34)が反時計方向、歯車(35)が時計方向、歯車(37)が反時計方向、歯車(38)が時計方向、歯車(39)が反時計方向、歯車(40)が反時計方向、歯車(41)が反時計方向、歯車(42)が時計方向に駆動される。これにより、搬送ローラ(20)は、反時計方向に回転し、ロータリガイド(19)も反時計方向に回転し、ディフレクタ(21)は、上方に回転される。歯車(39)の回転時、歯車(39)に取り付けられる図示しないワンウウェイクラッチは、噛み合い方向に作用し、歯車(39)と同軸上に固定されたロータリガイド(19)は、歯車(39)と同一方向に回転する。
【0034】
図27では、回収手段(52)へのカード(70)の回収が行われる。図17に示すように、スタックモータ(22)(図15)は、時計方向に回転し、第1のホルダ(16a)と第2のホルダ(16b)が上位置にあるとき、歯車(35)と歯車(36)の駆動が連結され、歯車(38)と歯車(39)の駆動が遮断される。歯車(31)が時計方向、歯車(32)が反時計方向、歯車(33)が時計方向、歯車(34)が反時計方向、歯車(35)が時計方向、歯車(36)が反時計方向、歯車(37)が反時計方向、歯車(38)が時計方向、歯車(40)が反時計方向、歯車(41)が反時計方向、歯車(42)が時計方向に駆動される。これにより、搬送ローラ(20)は、反時計方向に回転し、ロータリガイド(19)は、停止し、ディフレクタ(21)は、上方に回転される。歯車(36)の回転時、歯車(36)に取り付けられる図示しないワンウウェイクラッチの作用により、歯車(36)とロータリガイド(19)との間に滑りが生じて、歯車(36)と同軸上に固定されたロータリガイド(19)は回転しない。
【0035】
図24では、保管手段(51)へのカード(70)の回収が行われる。図18に示すように、スタックモータ(22)(図15)は、反時計方向に回転し、第1のホルダ(16a)と第2のホルダ(16b)が下位置にあるとき、歯車(35)と歯車(36)の駆動が遮断され、歯車(38)と歯車(39)の駆動が連結される。歯車(31)が反時計方向、歯車(32)が時計方向、歯車(33)が反時計方向、歯車(34)が時計方向、歯車(35)が時計方向、歯車(37)が時計方向、歯車(38)が反時計方向、歯車(39)が時計方向、歯車(40)が時計方向、歯車(41)が時計方向、歯車(42)が反時計方向に駆動される。これにより、搬送ローラ(20)は、時計方向に回転し、ロータリガイド(19)は、停止し、ディフレクタ(21)は、下方に回転される。歯車(39)の回転時、歯車(39)に取り付けられる図示しないワンウウェイクラッチの作用により、歯車(39)とロータリガイド(19)との間に滑りが生じて、歯車(39)と同軸上に固定されたロータリガイド(19)は回転しない。
【0036】
回収手段(52)からカード(70)を排出するとき、図19に示すように、スタックモータ(22)(図15)は、反時計方向に回転し、第1のホルダ(16a)と第2のホルダ(16b)の位置が、上位置の場合、歯車(35)と歯車(36)の駆動が連結され、歯車(38)と歯車(39)の駆動が遮断される。歯車(31)が反時計方向、歯車(32)が時計方向、歯車(33)が反時計方向、歯車(34)が時計方向、歯車(35)が反時計方向、歯車(36)が時計方向、歯車(37)が時計方向、歯車(38)が反時計方向、歯車(40)が時計方向、歯車(41)が時計方向、歯車(42)が反時計方向に駆動される。これにより、搬送ローラ(20)は、時計方向に回転し、ロータリガイド(19)は時計方向に回転し、ディフレクタ(21)は、下方に揺動する。歯車(36)の回転時、歯車(36)に取り付けられるワンウウェイクラッチ(36a)は、噛み合い方向に作用し、歯車(36)と同軸上に固定されたロータリガイド(19)は、歯車(36)と同一方向に回転する。
【0037】
本発明のカード印刷装置及びカード印刷収納装置は、図44に示す電気的構成を備える。単数又は複数のマイクロコンピュータ、集積回路又はディスクリート回路により構成される制御装置となる制御手段(IC)の入力端子には、入口センサ(8)、前部センサ(9)、中間センサ(10)、後部センサ(11)、読出手段(R)、サーマルセンサ(88)、イレースセンサ(89)、ヘッドドライバ(45)及び読出時の磁気ヘッド(50)が接続される。また、制御手段(IC)の出力端子には、搬送手段(T)、印刷手段(P)、書込時の磁気ヘッド(50)及び駆動手段(D)に接続される。搬送手段(T)には、搬送装置(C)が接続され、印刷手段(P)には、印刷ヘッド(46)、ヘッドドライバ(45)及び消去ヘッド(47)が接続される。
【0038】
図44に示すカード印刷装置及びカード印刷収納装置の電気回路は、図32乃至図42に示す動作シーケンスに従って作動される。
図31〜図37は、入口(4)に挿入するカード(70)を保管手段(51)内に収容する過程を示す。図32に示すスタート(ステップ100)からステップ101に進み、制御手段(IC)は、カード印刷装置(1)の入口(4)にカード(70)を挿入して、入口センサ(8)がカード(70)を検出したか否か判断する。カード(70)の挿入を検出する入口センサ(8)の検出信号を受信する制御手段(IC)は、搬送モータ(30)に駆動信号を付与して、搬送モータ(30)を正転する(ステップ102)ので、カード(70)は、搬送通路(5)に沿って内側に搬送される。前部センサ(9)がカード(70)を検出すると、前部センサ(9)は、検出信号を発生する(ステップ103)。次に、ステップ104では、前部センサ(9)からの検出信号を受信する制御手段(IC)は、検出信号から、カード(70)が複数重なる状態で搬送するか否か、即ち重券か否か判断する(ステップ104)。制御手段(IC)が重券と判断すると、ステップ105に進み、搬送モータ(30)の駆動を停止し、逆転(ステップ106)して、入口(4)にカード(70)を戻し、入口センサ(8)が戻されたカード(70)を検出(ステップ107)すると、ステップ108に進み、一連の動作を終了する。この状態では、使用者が入口(4)から突出するカード(70)を引き抜いて、カード(70)をカード印刷装置(1)から取り出すことができる。
【0039】
ステップ104では、制御手段(IC)が重券と判断せず、単一券と判断するとき、ステップ109に進み、更に搬送モータ(30)を正転して、カード(70)を搬送通路(5)の奥に移送する。磁気ヘッド(50)は、移動するカード(70)に磁気で記録されるバーコード又は他のコードを読み出して、制御手段(IC)に読出し信号を送出する(ステップ110)ので、制御手段(IC)は、読み出したバーコードからカード(70)の内容を判断する。磁気記録されるバーコードの代わりに、カード(70)に記録されるバーコードを何らかの光学センサにより光電子的に読み出して、制御手段(IC)に送出してもよい。次に、ステップ111に進み、後部センサ(23)がカード(70)の通過を検出したか否か判断する。後部センサ(23)がカード(70)の通過を検出すると、検出信号を制御手段(IC)に送出して、ステップ112に進み、制御手段(IC)は、搬送モータ(30)に作動接続されるロータリエンコーダが所定のパルス数を計数したか否か判断する。
【0040】
ステップ113では、ロータリエンコーダが所定のパルス数を計数したとき、搬送モータ(30)を停止した後、搬送モータ(30)を逆転する(ステップ114)。次に、ステップ115では、前部センサ(9)がカード(70)を検出したか否か判断し、前部センサ(9)がカード(70)を検出して検出信号を制御手段(IC)に送出する。ステップ116は、ロータリエンコーダが所定のパルス数を計数したか否か判断し、所定のパルス数を計数すると、ステップ117で搬送モータ(30)を停止し、ステップ118で再度搬送モータ(30)を正転して、イメージセンサ(48,49)がカード(70)の表面に記録される券面データを採取する(ステップ119)。その後、ステップ120に進み、後部センサ(23)がカード(70)を検出したか否か判断する。ステップ120にて後部センサ(23)がカード(70)を検出して、検出信号を制御手段(IC)に送出すると、制御手段(IC)は、ロータリエンコーダが所定パルス数を検出したか否か判断する(ステップ121)。ロータリエンコーダが所定パルス数を検出すると、ステップ122で搬送モータ(30)を停止し、ステップ123でイメージセンサ(48,49)が採取した券面データを制御手段(IC)に送出し、ステップ124で印刷手段(P)は、制御手段(IC)から消去コマンドを受信し、ステップ(125)で搬送モータ(30)を逆転して、ステップ126で磁気ヘッド(50)は、カード(70)に磁気記録されたデータを消去する。続いて、制御手段(IC)は、ステップ127で前部センサ(9)がカード(70)を検出したか否か判断し、前部センサ(9)がカード(70)を検出すると、ステップ128でロータリエンコーダが所定のパルス数を計数したか否か判断する。所定のパルス数を検出すると、ステップ129で搬送モータ(30)を停止した後、ステップ130で搬送モータ(30)を正転する。
【0041】
次に、ステップ131で後部センサ(23)がカード(70)を検出したか否か判断し、カード(70)を検出すると、ステップ132でロータリエンコーダが所定のパルス数を検出したか否か判断する。所定のパルス数を検出すると、ステップ133で搬送モータ(30)を停止しかつステップ134で搬送モータ(70)を逆転した後、制御手段(IC)は、ステップ135でカード(70)が消去ヘッド(47)に到達したか否か判断する。消去ヘッド(47)に到達したとき、ステップ136でヘッド保持モータ(45)を正転し、図示しない検出センサによりステップ137で消去ヘッド(47)の降下を完了したか否か判断する。検出センサが消去ヘッド(47)の降下を検出し、検出信号を制御手段(IC)に送出したとき、ステップ138でヘッド保持モータ(45)を停止する。次に、ステップ139で消去ヘッド(47)を作動し、ステップ140で搬送モータ(30)を逆転した後、ステップ141でロータリエンコーダのパルスを計数して、カード(70)を所定距離搬送したか否か判断し、ロータリエンコーダが所定のパルス数を制御手段(IC)に送出して、所定距離搬送したとき、ステップ142でヘッド保持モータ(45)を正転し、ステップ143で図示しない検出センサにより消去ヘッド(47)が上昇を完了したか否かを判断する。
【0042】
ステップ143にて検出センサが消去ヘッド(47)の上昇を検出し、検出信号を制御手段(IC)に送出したとき、ステップ144にてヘッド保持モータ(45)を停止し、ステップ145にて前部センサ(9)がカード(70)を検出したか否か判断する。前部センサ(9)がカード(70)を検出すると、ステップ146にてロータリエンコーダが所定パルス数を計数したか否か判断し、所定パルス数を計数すると、ステップ147で搬送モータ(30)を停止し、ステップ148で制御手段(IC)からイメージセンサ(48,49)が収納コマンドを受信したか否か判断する。続いて、ステップ149にて搬送モータ(30)を正転し、ステップ150にてイメージセンサ(48,49)がカード(70)からイメージデータを読み込み、ステップ151では、後部センサ(23)の検出信号により、制御手段(IC)は、カード(70)が後部センサ(23)を通過したか否か判断する。カード(70)が後部センサ(23)を通過すると、ステップ152でロータリエンコーダが所定パルス数を計数したか否か判断し、所定パルス数を計数すると、ステップ153にて搬送モータ(30)を停止する。
【0043】
更に、ステップ154では、制御手段(IC)は、イメージセンサ(48,49)の検出信号によりカード(70)に汚染が検出されるか否か判断し、汚染を検出しないと、ステップ165にジャンプし、汚染を検出すると、ステップ155に進み、ホルダ(16a,16b)が上位置にあるか否か判断する。ステップ155にてホルダ(16a,16b)が上位置にないと、制御手段(IC)は、ステップ156にて保持モータ(11)を作動してホルダ(16a,16b)を上位置に移動する。ステップ155にてホルダ(16a,16b)が上位置にあると、ステップ157にて搬送モータ(30)を正転すると共に、ステップ158にてスタックモータ(22)を正転して、ステップ159にて後部センサ(23)がカード(70)の通過を検出したか否か判断する。制御手段(IC)が後部センサ(23)からの検出信号によりカード(70)が後部センサ(23)を検出すると、ステップ160にてロータリエンコーダが所定パルス数を計数したか否か判断し、制御手段(IC)が所定パルス数の計数を検出したとき、制御手段(IC)は、搬送モータ(30)を停止し(ステップ161)かつスタックモータ(22)を停止する。続いて、ステップ163にて制御手段(IC)が内蔵するタイマにより所定時間の経過を検出したとき、動作過程を終了する(ステップ164)。
【0044】
ステップ154にてカード(70)上の汚染を検出しないと、ステップ165に進み、ホルダ(16a,16b)が下位置にあるか否か判断する。ステップ165にてホルダ(16a,16b)が下位置にないと、制御手段(IC)は、ステップ166にて保持モータ(11)を作動してホルダ(16a,16b)を下位置に移動する。ステップ165にてホルダ(16a,16b)が下位置にあると、ステップ167にて搬送モータ(30)を正転すると共に、ステップ168にてスタックモータ(22)を逆転して、ステップ169にて後部センサ(23)がカード(70)の通過を検出したか否か判断する。ステップ169にてカード(70)が後部センサ(23)を通過すると、ステップ170にてロータリエンコーダが所定パルス数を計数したか否か判断し、所定パルス数を計数すると、ステップ171にて搬送モータ(30)を停止し、ステップ172にてスタックモータ(22)を停止する。その後、ステップ173にて制御手段(IC)が内蔵するタイマにより所定時間経過したか否か判断し、所定時間が経過すると一連の動作過程を終了する(ステップ174)。
【0045】
図38〜図42は、保管手段(51)内に収容されるカード(70)を入口(4)に払い出す過程を示す。ステップ200からステップ201に進み、使用者が精算ボタンを押すと、ステップ202に進み、制御手段(IC)は、制御手段(IC)に接続される図示しないセンサの出力によりロータリガイド(19)が初期位置にあるか否かを判断する。ロータリガイド(19)が初期位置にないとき、制御手段(IC)は、スタックモータ(22)を駆動して、ロータリガイド(19)を初期位置に回転する(ステップ203)。ステップ202にてロータリガイド(19)が初期位置にあると、ステップ204にてスタックモータ(22)を正転し、ステップ205に進み、制御手段(IC)は、後部センサ(23)がカード(70)を検出したか否かを判断し、後部センサ(23)がカード(70)を検出すると、ステップ206に進み、ロータリエンコーダが所定パルス数を計数したか否かを判断する。所定パルス数を計数すると、ステップ207にてスタックモータ(22)を停止し、搬送モータ(30)を逆転する。続いて、ステップ209にて、制御手段(IC)は、前部センサ(9)がカード(70)を検出したか否か判断し、前部センサ(9)がカード(70)を検出する検出信号を制御手段(IC)に送出すると、ステップ206にてロータリエンコーダが所定のパルス数を計数したか否か判断する。所定のパルス数を計数すると、ステップ207にてスタックモータ(22)を停止し、ステップ208にて搬送モータ(30)を逆転する。更に、ステップ209にて前部センサ(9)がカード(70)を検出したか否か判断し、カード(70)を検出すると、ステップ210にてロータリエンコーダが所定パルス数を計数したか否か判断する。所定パルス数を計数すると、ステップ211にて搬送モータ(30)を停止し、ステップ212にて搬送モータ(30)を正転し、ステップ213にて磁気ヘッド(50)が磁気データを読み取る。その後、ステップ214にて制御手段(IC)は、中間センサ(10)がカード(70)を検出したか否か判断し、中間センサ(10)の検出信号を受信する制御手段(IC)がカード(70)を中間センサ(10)が検出したことを確認したときに、ステップ215にて制御手段(IC)は、ロータリエンコーダが所定パルス数を計数したか否か判断する。所定パルス数を計数したとき、制御手段(IC)は、ステップ216にて搬送モータ(30)を停止し、ステップ217にて磁気カウンタが所定数以下か否か判断する。
【0046】
ステップ217にて磁気カウンタが所定数以下でないとき、ステップ226に進み、カード(70)を回収手段(52)に収納した後、一連の動作過程を終了する(ステップ227)。ステップ217にて磁気カウンタが所定数以下のとき、ステップ218にて搬送モータ(30)を逆転し、ステップ219にて磁気データを書込む。続いて、ステップ220にて制御手段(IC)は、前部センサ(9)がカード(70)を検出したか否か判断し、カード(70)を検出すると、ステップ221にてロータリエンコーダが所定パルス数を計数したか否か判断する。所定パルス数を検出すると、ステップ222にて搬送モータ(30)を停止し、ステップ223にて搬送モータ(30)を正転した後、ステップ224にて制御手段(IC)は、磁気データが正常か否か判断する。磁気データが正常でないとき、ステップ225に進み反復動作が4回以下か否か判断し、反復動作が4回以下の場合は、ステップ219に戻り、反復動作が4に達すると、ステップ226に進む。ステップ224にて磁気データが正常なときは、ステップ228に進む。
【0047】
ステップ228では、制御手段(IC)は、中間センサ(10)がカード(70)を検出したか否か判断する。中間センサ(10)がカード(70)を検出して検出信号を制御手段(IC)に送出すると、ステップ229に進み、制御手段(IC)は、ロータリエンコーダが所定パルス数を計数したか否か判断する。所定パルス数を計数すると、ステップ230にて搬送モータ(30)を停止し、ステップ231にて搬送モータ(30)を逆転する。続いて、ステップ232にて前部センサ(9)がカード(70)を検出したか否か判断し、前部センサ(9)がカード(70)を検出すると、ステップ233にてロータリエンコーダが所定パルス数を計数したか否か判断する。所定パルス数を計数すると、ステップ234にえ搬送モータ(30)を停止し、搬送モータ(30)を正転する。
【0048】
その後、ステップ236にて制御手段(IC)は、後部センサ(23)がカード(70)を検出したか否か判断し、後部センサ(23)が検出すると、制御手段(IC)は、ステップ237にてロータリエンコーダが所定パルス数を検出したか否か判断する。所定パルス数を検出すると、ステップ238にて搬送モータ(30)を停止し、ステップ239にて搬送モータ(30)を逆転する。更に、カード(70)が印刷ヘッド(46)に到達したか否か判断し、印刷ヘッド(46)に到達すると、ステップ241にて搬送モータ(30)を停止し、ヘッド保持モータ(45)を逆転する。続いて、制御手段(IC)は、印刷ヘッド(46)の降下を完了したか否か判断し、降下が完了すると、ステップ244に進み、ヘッド保持モータ(45)を停止し、ステップ245にて印刷手段(P)は、印刷データを受信し、制御手段(IC)は、ステップ246にて印刷ヘッド(46)を作動する。ステップ247では、制御手段(IC)は、搬送モータ(30)を逆転して、ステップ248では、中間センサ(10)がカード(70)を検出したか否か判断する。ステップ248では、ロータリエンコーダが所定パルス数を計数したか否か判断し、所定パルス数を計数すると、ステップ250に進み、搬送モータ(30)を停止する。
【0049】
その後、ステップ251に進み、ヘッド保持モータ(45)を逆転し、ステップ252にて印刷ヘッド(46)の上昇が完了したか否か判断する。印刷ヘッド(46)が上昇を完了すると、ステップ253にてヘッド保持モータ(45)を停止し、ステップ254にて搬送モータ(30)を逆転する。その後、ステップ255にて制御手段(IC)は、前部センサ(9)がカード(70)を検出したか否か判断し、前部センサ(9)がカード(70)を検出する検出信号を制御手段(IC)に送出したとき、ステップ256に進み、制御手段(IC)は、ロータリエンコーダが所定パルス数を計数したか否か判断する。所定パルス数を検出すると、ステップ257にて制御手段(IC)は、搬送モータ(30)を停止し、ステップ258にて入口(4)からカード(70)が引き抜かれたか判断する。入口(4)からカード(70)が引き抜かれると、入口センサ(8)が引抜を検出するので、一連の動作過程が終了する(ステップ259)。
【0050】
本発明によるカード印刷装置及びカード印刷収納装置の実施の形態では、下記の作用効果を得ることができる。
(1) 使用に不適当なカード(70)を回収手段(52)に収納して、顧客に対して不適当なカードの払出しを阻止して、サービスを向上できる。
(2) 収納手段(7)に設けるディフレクタ(21)により保管手段(51)と回収手段(52)とに振り分けてカード(70)を収納するので、装置全体を小型化できる。
(3) 収納手段(7)に設けるロータリガイド(19)により収納手段(7)からカード(70)を確実に払出すことができる。
(4) カード印刷装置(1)に収納手段(7)を着脱自在に設けられるため、収納手段(7)へのカード(70)の補充と回収が容易となる。
(5) 磁気情報の読み書きが可能な磁気情報取扱手段(50)を搬送手段(T)に設けるので、使用回数等の情報を容易に管理することができる。
(6) 搬送通路(5)に設けるイメージセンサ(48,49)によりカード(70)のイメージデータを取り出して、カード(70)への落書きを検出することができる。
【0051】
本発明の前記実施の形態は、種々の変更が可能である。例えば、搬送通路(5)の両側に一対のイメージセンサ(48,49)を設けずに片側のみにイメージセンサを設けてもよい。印刷ヘッド(46)と消去ヘッド(47)とを個別に図示したが、印刷消去一体型のヘッドを使用してもよい。
【0052】
ゲーム機、紙幣鑑別機又は自動販売機内の制御装置若しくはコンピュータ等の外部制御装置に制御手段(IC)を接続して、外部制御装置から書込み指令又は消去指令を受信したとき、制御手段(IC)は、カード(70)に情報を書込み又は情報を消去してもよい。一対の第1のホルダ(16a)と第2のホルダ(16b)を使用する例を示したが、単一のホルダ(16)のみを使用してもよい。
【産業上の利用可能性】
【0053】
本発明は、ゲーム機等の遊技機器、紙幣鑑別機又は自動販売機等の省力機器に使用するカードに情報を再書込み可能に印刷し又は情報を消去するシステムに適用できる。
【図面の簡単な説明】
【0054】
【図1】本発明によるカード印刷収納装置の断面図
【図2】本発明によるカード印刷装置の搬送手段を示す斜視図
【図3】図1に示すカード印刷装置に装着する印刷ヘッドを移動するヘッドドライバの斜視図
【図4】図3に示すヘッドドライバを構成する駆動構造を示す平面図及び側面図
【図5】スタックローラの動力伝達手段を示す左方向斜視図
【図6】スタックローラの動力伝達手段を示す右方向斜視図
【図7】動力伝達手段に組み込まれる摩擦クラッチの断面図
【図8】ロータリガイド、カードを押圧する保持手段及びスタックローラの動力伝達手段を示す斜視図
【図9】保持手段の斜視図
【図10】ロータリガイドを除去した図8に示す保持手段と動力伝達手段を示す斜視図
【図11】ロータリガイドを一方向に回転する状態にあるカードを押圧する保持手段及びスタックローラの動力伝達手段を示す平面図及び側面図
【図12】ロータリガイドを他方向に回転する状態にあるカードを押圧する保持手段及びスタックローラの動力伝達手段を示す平面図及び側面図
【図13】ロータリガイドの駆動装置を示す左方向の斜視図
【図14】ロータリガイドの駆動装置を示す右方向の斜視図
【図15】ロータリガイドの駆動装置を示す平面図及び側面図
【図16】一方向にロータリガイドを回転して、カードを保管手段に収納する駆動装置を示す側面図
【図17】他方向にロータリガイドを回転して、カードを回収手段に収納する駆動装置を示す側面図
【図18】一方向にロータリガイドを回転して、カードを保管手段から排出する駆動装置を示す側面図
【図19】他方向にロータリガイドを回転して、カードを回収手段から排出する駆動装置を示す側面図
【図20】下位置に移動したホルダを示す収納手段の断面図
【図21】上位置に移動したホルダを示す収納手段の断面図
【図22】ホルダを下位置に移動した収納手段の断面図
【図23】保管手段にカードを収納する状態を示す収納手段の断面図
【図24】図23に示す状態でカードを保管手段に搬送する収納手段の断面図
【図25】ホルダを上位置に移動した収納手段の断面図
【図26】回収手段にカードを収納する状態を示す収納手段の断面図
【図27】図26に示す状態でカードを回収手段に搬送する収納手段の断面図
【図28】ホルダを下位置にホルダを移動した収納手段の断面図
【図29】保管手段からカードを排出する状態を示す収納手段の断面図
【図30】一方のガイドを回転して、保管手段からカードを排出する状態を示す収納手段の断面図
【図31】図30の状態から後続のカードの排出を阻止する状態を示す収納手段の断面図
【図32】本発明によるカード印刷収納装置の第1の動作過程を示すフローチャート
【図33】本発明によるカード印刷収納装置の第2の動作過程を示すフローチャート
【図34】本発明によるカード印刷収納装置の第3の動作過程を示すフローチャート
【図35】本発明によるカード印刷収納装置の第4の動作過程を示すフローチャート
【図36】本発明によるカード印刷収納装置の第5の動作過程を示すフローチャート
【図37】本発明によるカード印刷収納装置の第6の動作過程を示すフローチャート
【図38】本発明によるカード印刷収納装置の第7の動作過程を示すフローチャート
【図39】本発明によるカード印刷収納装置の第8の動作過程を示すフローチャート
【図40】本発明によるカード印刷収納装置の第9の動作過程を示すフローチャート
【図41】本発明によるカード印刷収納装置の第10の動作過程を示すフローチャート
【図42】本発明によるカード印刷収納装置の第11の動作過程を示すフローチャート
【図43】本発明のカード印刷収納装置を構成するカード印刷装置から収納手段を分離する状態を示す断面図
【図44】本発明のカード印刷収納装置に使用する電気制御システムを示すブロック図
【符号の説明】
【0055】
(1)・・カード印刷装置、 (4)・・入口、 (5)・・搬送通路、 (7)・・収納手段、 (8)・・入口センサ、 (9)・・前部センサ、 (10)・・中間センサ、 (11)・・保持モータ、 (13)・・第1のベルクランク、 (14)・・第2のベルクランク、 (15)・・ガイド、 (16a)・・第1のホルダ、 (16b)・・第2のホルダ、 (17)・・第1のレバー、 (18)・・第2のレバー、 (19)・・ロータリガイド、 (20)・・スタックローラ、 (21)・・ディフレクタ、 (22)・・スタックモータ、 (23)・・後部センサ、 (24,27a)・・入口ローラ、 (25,27b)・・中間ローラ、 (26,27c)・・後部ローラ、 (30)・・搬送モータ、 (45)・・ヘッドドライバ、 (46)・・印刷ヘッド、 (47)・・消去ヘッド、 (48,49)・・イメージセンサ、 (50)・・磁気ヘッド、 (51)・・保管手段、 (52)・・回収手段、 (70)・・カード、 (C)・・搬送装置、 (D)・・駆動手段、 (F)・・動力伝達手段、 (G)・・ガイド装置、 (H)・・保持手段、 (IP)・・制御手段、 (L)・・リンク装置、 (P)・・印刷手段、 (R)・・読出手段、 (RD)・・回転ガイド装置、 (SR)・・スタックローラ装置、 (T)・・搬送手段、
【特許請求の範囲】
【請求項1】
一端が入口となる搬送通路に沿ってカードを搬送する搬送手段と、
搬送通路に設けられて搬送通路に沿って搬送されるカードに記録される情報を読み出す読出手段と、
カードの表面に情報を記録しかつ記録された情報を消去する記録消去可能な印刷手段と、
搬送手段、読出手段及び印刷手段に接続されかつ読出手段から送出される情報に基づいて、カードの表面に情報を記録し又はカードの表面に記録された情報の消去を決定して、搬送手段及び印刷手段の動作を制御する制御手段とを備えることを特徴とするカード印刷装置。
【請求項2】
搬送手段は、搬送通路の入口に挿入されるカードを検出して検出信号を制御手段に発生する入口センサと、
入口センサの検出信号を受信する制御手段により駆動されてカードを搬送通路に沿って移動する搬送装置とを備える請求項1に記載のカード印刷装置。
【請求項3】
読出手段は、光学センサ又は磁気センサである請求項1又は2に記載のカード印刷装置。
【請求項4】
記録消去可能な印刷手段は、搬送通路に沿って配置されて部分的に加熱することによりカードに情報を印刷する感熱式の印刷ヘッドと、
搬送通路に接近する印刷位置と、搬送通路から離間する休止位置との間で印刷ヘッドを移動するヘッドドライバと、
搬送通路に沿って配置され部分的に加熱することによりカードから情報を消去する感熱式の消去ヘッドとを備える請求項1乃至3の何れか1項に記載のカード印刷装置。
【請求項5】
搬送手段は、入口センサの後方で搬送通路に対向して配置される一対の入口ローラと、
入口ローラの後方で搬送通路に配置されてカードの通過を検出する前部センサと、
前部センサの後方で搬送通路に対向して配置される一対の中間ローラと、
中間ローラの後方で搬送通路に配置されてカードの通過を検出する中間センサと、
中間センサの後方で搬送通路に対向して配置される一対の後方ローラと、
後方ローラの後方で搬送通路に対向して配置される後方センサとを備える請求項1乃至4の何れか1項に記載のカード印刷装置。
【請求項6】
請求項1乃至5の何れか1項に記載されるカード印刷装置と、
搬送通路の他端に設けられかつ搬送通路に沿って搬送されるカードを収納する収納手段とを備え、
制御手段は、読出手段から送出される情報に基づいて、収納手段へのカードの収納又は収納手段から入口へのカードの払出を制御することを特徴とするカード印刷収納装置。
【請求項7】
収納手段は、入口から挿入されて搬送通路を通るカードを一時的に収納する保管手段と、
搬送通路を通るカードを入口に搬送せずに回収する回収手段とを備える請求項6に記載のカード印刷収納装置。
【請求項8】
収納手段は、収納手段の入口に設けられかつ保管手段内にカードを収納する保管位置と、回収手段内にカードを収納する回収位置との間で移動するディフレクタと、
制御手段からの信号により保管位置と回収位置との間でディフレクタを移動する駆動装置とを備える請求項7に記載のカード印刷収納装置。
【請求項9】
収納手段は、搬送通路とディフレクタとの間に配置されたロータリガイドを備える請求項8に記載のカード印刷収納装置。
【請求項10】
収納手段は、保管手段内にカードを収納するとき又は保管手段からカードを引き出すときに、回収手段内に収容されるカードを押圧すると共に、回収手段内にカードを収納するときに、保管手段内に収納されるカードを押圧する保持手段を備える請求項6乃至9の何れか1項に記載のカード印刷収納装置。
【請求項11】
保持手段は、回収手段内に収容されるカードを押圧する下位置と、保管手段内に収納されるカードを押圧する上位置との間で移動するホルダを備え、
ホルダは、収納手段内に配置される請求項10に記載のカード印刷収納装置。
【請求項12】
保持手段は、カード印刷装置内に配置される保持モータと、
保持モータの回転力をホルダに伝達して、保持モータの正転又は逆転により回収手段内に収容されるカードを押圧する下位置と、保管手段内に収納されるカードを押圧する上位置との間でホルダを移動するリンク装置とを備える請求項11に記載のカード印刷収納装置。
【請求項13】
カード印刷装置に配置されるスタックモータと、
収納手段内に配置されて保管手段内に収容されるカード又は回収手段内に収容されるカードの何れかに当接して、保管手段内のカードに当接するとき、保管手段内にカードを収納し又は保管手段からカードをカード印刷装置に取り出し、回収手段内のカードに当接するとき、回収手段内にカードを収納するスタックローラと、
スタックモータの回転力をスタックローラに伝達する動力伝達手段とを備える請求項11に記載のカード印刷収納装置。
【請求項14】
搬送通路を形成するカード印刷装置に対して収納手段を着脱自在に取り付けた請求項12又は13に記載のカード印刷収納装置。
【請求項15】
制御手段を外部制御装置に接続して、外部制御装置から書込み指令又は消去指令を受信したとき、制御手段は、カードに情報を書込み又は情報を消去する請求項6乃至14の何れか1項に記載のカード印刷収納装置。
【請求項1】
一端が入口となる搬送通路に沿ってカードを搬送する搬送手段と、
搬送通路に設けられて搬送通路に沿って搬送されるカードに記録される情報を読み出す読出手段と、
カードの表面に情報を記録しかつ記録された情報を消去する記録消去可能な印刷手段と、
搬送手段、読出手段及び印刷手段に接続されかつ読出手段から送出される情報に基づいて、カードの表面に情報を記録し又はカードの表面に記録された情報の消去を決定して、搬送手段及び印刷手段の動作を制御する制御手段とを備えることを特徴とするカード印刷装置。
【請求項2】
搬送手段は、搬送通路の入口に挿入されるカードを検出して検出信号を制御手段に発生する入口センサと、
入口センサの検出信号を受信する制御手段により駆動されてカードを搬送通路に沿って移動する搬送装置とを備える請求項1に記載のカード印刷装置。
【請求項3】
読出手段は、光学センサ又は磁気センサである請求項1又は2に記載のカード印刷装置。
【請求項4】
記録消去可能な印刷手段は、搬送通路に沿って配置されて部分的に加熱することによりカードに情報を印刷する感熱式の印刷ヘッドと、
搬送通路に接近する印刷位置と、搬送通路から離間する休止位置との間で印刷ヘッドを移動するヘッドドライバと、
搬送通路に沿って配置され部分的に加熱することによりカードから情報を消去する感熱式の消去ヘッドとを備える請求項1乃至3の何れか1項に記載のカード印刷装置。
【請求項5】
搬送手段は、入口センサの後方で搬送通路に対向して配置される一対の入口ローラと、
入口ローラの後方で搬送通路に配置されてカードの通過を検出する前部センサと、
前部センサの後方で搬送通路に対向して配置される一対の中間ローラと、
中間ローラの後方で搬送通路に配置されてカードの通過を検出する中間センサと、
中間センサの後方で搬送通路に対向して配置される一対の後方ローラと、
後方ローラの後方で搬送通路に対向して配置される後方センサとを備える請求項1乃至4の何れか1項に記載のカード印刷装置。
【請求項6】
請求項1乃至5の何れか1項に記載されるカード印刷装置と、
搬送通路の他端に設けられかつ搬送通路に沿って搬送されるカードを収納する収納手段とを備え、
制御手段は、読出手段から送出される情報に基づいて、収納手段へのカードの収納又は収納手段から入口へのカードの払出を制御することを特徴とするカード印刷収納装置。
【請求項7】
収納手段は、入口から挿入されて搬送通路を通るカードを一時的に収納する保管手段と、
搬送通路を通るカードを入口に搬送せずに回収する回収手段とを備える請求項6に記載のカード印刷収納装置。
【請求項8】
収納手段は、収納手段の入口に設けられかつ保管手段内にカードを収納する保管位置と、回収手段内にカードを収納する回収位置との間で移動するディフレクタと、
制御手段からの信号により保管位置と回収位置との間でディフレクタを移動する駆動装置とを備える請求項7に記載のカード印刷収納装置。
【請求項9】
収納手段は、搬送通路とディフレクタとの間に配置されたロータリガイドを備える請求項8に記載のカード印刷収納装置。
【請求項10】
収納手段は、保管手段内にカードを収納するとき又は保管手段からカードを引き出すときに、回収手段内に収容されるカードを押圧すると共に、回収手段内にカードを収納するときに、保管手段内に収納されるカードを押圧する保持手段を備える請求項6乃至9の何れか1項に記載のカード印刷収納装置。
【請求項11】
保持手段は、回収手段内に収容されるカードを押圧する下位置と、保管手段内に収納されるカードを押圧する上位置との間で移動するホルダを備え、
ホルダは、収納手段内に配置される請求項10に記載のカード印刷収納装置。
【請求項12】
保持手段は、カード印刷装置内に配置される保持モータと、
保持モータの回転力をホルダに伝達して、保持モータの正転又は逆転により回収手段内に収容されるカードを押圧する下位置と、保管手段内に収納されるカードを押圧する上位置との間でホルダを移動するリンク装置とを備える請求項11に記載のカード印刷収納装置。
【請求項13】
カード印刷装置に配置されるスタックモータと、
収納手段内に配置されて保管手段内に収容されるカード又は回収手段内に収容されるカードの何れかに当接して、保管手段内のカードに当接するとき、保管手段内にカードを収納し又は保管手段からカードをカード印刷装置に取り出し、回収手段内のカードに当接するとき、回収手段内にカードを収納するスタックローラと、
スタックモータの回転力をスタックローラに伝達する動力伝達手段とを備える請求項11に記載のカード印刷収納装置。
【請求項14】
搬送通路を形成するカード印刷装置に対して収納手段を着脱自在に取り付けた請求項12又は13に記載のカード印刷収納装置。
【請求項15】
制御手段を外部制御装置に接続して、外部制御装置から書込み指令又は消去指令を受信したとき、制御手段は、カードに情報を書込み又は情報を消去する請求項6乃至14の何れか1項に記載のカード印刷収納装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】

【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【公開番号】特開2009−241538(P2009−241538A)
【公開日】平成21年10月22日(2009.10.22)
【国際特許分類】
【出願番号】特願2008−94020(P2008−94020)
【出願日】平成20年3月31日(2008.3.31)
【出願人】(000230858)日本金銭機械株式会社 (43)
【Fターム(参考)】
【公開日】平成21年10月22日(2009.10.22)
【国際特許分類】
【出願日】平成20年3月31日(2008.3.31)
【出願人】(000230858)日本金銭機械株式会社 (43)
【Fターム(参考)】
[ Back to top ]