
カーナビゲーション装置、制御方法及びプログラム
【課題】誘導経路上の誘導指示地点−誘導対象地点間に種別の異なる複数の道路が存在する場合にも、カーナビゲーション装置10が誘導指示地点を適切に設定できるようにする。
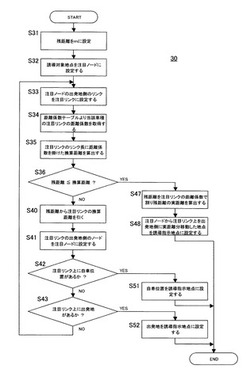
【解決手段】誘導対象地点から自車位置の方へ順番にノード(交差点等)N1,N2,N3,・・・及びリンク(交差点間の道路)L1,L2,L3,・・・、とし、道路種別ごとに距離係数を設定する。最初に、残距離に初期値を設定する(S31)。各リンクについて、L1から順番に、換算距離(=距離×距離係数)を算出するごとに(S34)。残距離≦換算距離の正否を判定し(S36)、否であれば、mをm←(m−換算距離)に更新して(S71)。次のリンクについて同一のことを繰り返す。正であれば、現在のリンク上に誘導指示地点を設定する(S47,S48)。
【解決手段】誘導対象地点から自車位置の方へ順番にノード(交差点等)N1,N2,N3,・・・及びリンク(交差点間の道路)L1,L2,L3,・・・、とし、道路種別ごとに距離係数を設定する。最初に、残距離に初期値を設定する(S31)。各リンクについて、L1から順番に、換算距離(=距離×距離係数)を算出するごとに(S34)。残距離≦換算距離の正否を判定し(S36)、否であれば、mをm←(m−換算距離)に更新して(S71)。次のリンクについて同一のことを繰り返す。正であれば、現在のリンク上に誘導指示地点を設定する(S47,S48)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、誘導対象地点の設定を改善するカーナビゲーション装置、制御方法及びプログラムに関するものである。
【背景技術】
【0002】
カーナビゲーション装置は、ディスプレイの地図画面に目的地までの誘導経路を提示して、ユーザの自動車を誘導するようになっている。誘導経路による誘導期間では、該自動車が、曲折地点等の誘導対象地点に適当な距離まで接近した時に、該誘導対象地点における進路方向についての音声や視覚表示による案内を行っている。誘導指示地点は、誘導対象地点から遠過ぎずかつ近過ぎない適切な地点に設定することが望まれる。
【0003】
特許文献1のカーナビゲーション装置は、現在、走行中の道路についてそれが一般道路及び高速道路等のどの道路種別にあるかを検知して(特許文献1の図2のフローチャートの]S103→S104又はS105)、自動速度取締り装置の設置場所(オービス位置)に対して、道路種別に対応する距離に近づくと、ユーザに警告案内を発する(特許文献1の図3及び図4のフローチャートのS203,S204,S303,S304)ようになっている。
【0004】
特許文献2のカーナビゲーション装置は、1つの誘導対象地点に対して、現在、走行中の道路の種別に応じた距離で複数の案内ポイントを設定し、該1つの誘導対象地点についての各案内ポイントにおける案内内容を変更するようになっている(特許文献2の図6の案内ポイントまでの距離及び案内内容)。
【0005】
特許文献3のカーナビゲーション装置は、走行中の道路ではなく、案内対象交差点への進入直前の道路(進入元道路)の種別に応じて区間案内許可距離を設定し(特許文献3の図5のフローチャートのS20)、案内対象交差点へ区間案内許可距離までの地点に到達すると、音声案内を実行するようになっている(特許文献3の段落0038,0057及び図5のフローチャートのS50)。
【0006】
特許文献4のカーナビゲーション装置は、分岐交差点への進入元道路の種別及び案内内容に応じて案内地点を設定するようになっている(特許文献4の図3)。
【0007】
すなわち、道路種別に基づき誘導対象地点−誘導指示地点間の距離を設定する従来方式には、(a)特許文献1,2のように、現在、走行中の道路の種別に基づく方式と、(b)特許文献3,4のように、誘導対象地点への進入元の道路の種別に基づく方式とがある。
【特許文献1】特開2000−20891号公報
【特許文献2】特開2006−90844号公報
【特許文献3】特開2000−258179号公報
【特許文献4】特開2002−202147号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
道路種別に応じた誘導指示地点の設定では、自動車が高速で走行する種別の道路程、誘導対象地点−誘導指示地点間の距離は長く設定するのが通常である。しかしながら、誘導指示地点−誘導対象地点間に種別の異なる道路が複数、存在する場合は、このような(a)及び(b)の方式共に、不都合な誘導指示地点が設定されることが起こり得る。
【0009】
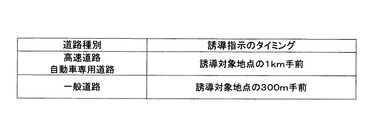
この不都合について、誘導経路が、後述の本発明の好ましい実施の形態の項で詳説する図2及び図3を参照して説明する。後述するように、図2において、ノードN1は誘導対象地点であり、リンクL1〜L3の道路種別及びリンク長は図3のように想定されている。また、道路種別ごとの誘導対象地点から誘導指示地点までの距離は図9の誘導指示のタイミングとして示している。
【0010】
上述(a)の方式では、自車位置の道路は一般道であるので、誘導指示地点は、図9に示すように、誘導対象地点の手前300mの地点に設定されることになる。したがって、N1−N3間の距離は100mであるので、誘導指示地点は、ノードN3からノードN4の方へ200mの地点になる。この場合、自動車は、誘導対象地点の手前の計100mの都市高速道路本線及び都市高速道路ランプを非常に短時間で通過してしまうので、該誘導指示地点は誘導対象地点に対して不適切に近くなる。
【0011】
上述(b)の方式では、N1への進入元道路のL1は都市間高速道路本線であるので、誘導指示地点は、図9に示すように、誘導対象地点の手前1kmの地点に設定されることになる。したがって、N1−N3間の距離は100mであるので、誘導指示地点は、ノードN3からノードN4の方へ900mの地点になる。この場合、自動車が一般道の900mの走行に長大な時間を費やし、該誘導指示地点は誘導対象地点から不適切に遠くなる。
【0012】
本発明の目的は、誘導指示地点−誘導対象地点間に種別の異なる複数の道路が存在していても、適切な誘導指示地点を設定することができるカーナビゲーション装置、制御方法及びプログラムを提供することである。
【課題を解決するための手段】
【0013】
本発明によれば、道路の種別に対応して補正係数を設定し、誘導対象地点−自車位置間の各誘導経路部分について、その距離を補正係数により補正した補正量を計算する。そして、計算した補正量に係る量と所定の基準量との対比に基づき、誘導指示地点を設定する。
【0014】
本発明のカーナビゲーション装置は次の手段を備えている。
自車位置−誘導対象地点間の誘導経路上の各誘導経路部分の種別を検出する種別検出手段、
各誘導経路部分についてその種別に応じて設定されている補正係数を検出する補正係数検出手段、
自車位置−誘導対象地点間の各誘導経路部分の距離を補正係数により補正した補正量を算出する補正量算出手段、及び
自車位置−誘導対象地点間の各誘導経路部分の補正量に係る量と基準量との対比に基づき誘導指示地点を設定する誘導指示地点設定手段。
【0015】
本発明のカーナビゲーション装置制御方法は次のステップを備えている。
自車位置−誘導対象地点間の誘導経路上の各誘導経路部分の種別を検出するステップ、
各誘導経路部分についてその種別に応じて設定されている補正係数を検出するステップ、
自車位置−誘導対象地点間の各誘導経路部分の距離を補正係数により補正した補正量を算出するステップ、及び
自車位置−誘導対象地点間の各誘導経路部分の補正量に係る量と基準量との対比に基づき誘導指示地点を設定するステップ。
【0016】
本発明のプログラムは本発明の上述のカーナビゲーション装置の各手段としてコンピュータを機能させる。
【発明の効果】
【0017】
本発明によれば、誘導対象地点−自車位置間の道路について、それらの距離を種別に応じた補正係数により補正し、補正量に係る量と所定の基準量との対比に基づき誘導指示地点を設定するので、誘導対象地点−自車位置間に種別の異なる複数の誘導経路部分が存在していても、誘導対象地点から適切な地点に誘導指示地点を設定することができる。
【発明を実施するための最良の形態】
【0018】
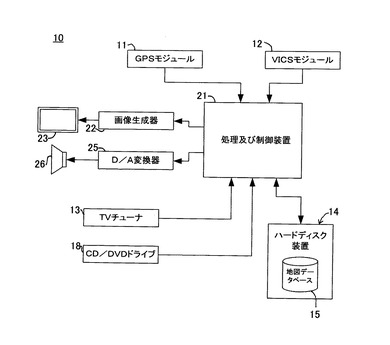
図1はカーナビゲーション装置10の模式図である。カーナビゲーション装置10は、GPSモジュール11、VICS(Vehicle Information and Communication System)モジュール12、TVチューナ13及びハードディスク装置14を含む。GPSモジュール11は、GPS衛星からの電波に基づき自車位置を検出する。VICSモジュール12は、FM多重放送等から道路渋滞情報を受信する。
【0019】
TVチューナ13は、VHFやUHFのテレビ放送電波に係るビデオ及びオーディオ信号を出力する。ハードディスク装置14は、地図データベース15を含むとともに、CD等からダビングした楽曲データ等を適宜書き込み及び読み出し自在になっている。CD/DVDドライブ18は、音楽や地図データベース用のCDやDVDを適宜、セット自在になっている。
【0020】
処理及び制御装置21は、CPUを含み、GPSモジュール11、VICSモジュール12、TVチューナ13、ハードディスク装置14及びCD/DVDドライブ18からのデータ及び信号を受け取り、各種の処理を実行する。画像生成器22は、処理及び制御装置21から入力されるデータに基づき画像表示信号を生成して、モニタ23に出力する。D/A変換器25は、処理及び制御装置21からデジタルオーディオ信号を受け、それをアナログオーディオ信号へ変換して、スピーカ26へ出力する。
【0021】
図2は誘導経路の所定部分の説明図である。N1,N2,N3,N4は”ノード”と呼ぶことにする。ノードには、道路において複数の進み先が存在する分岐地点の他に、道路種別が切り替わる変更地点も含まれる。N1は、次の誘導対象地点であり、図2では、説明の便宜上、誘導経路においてN1から出発地側方向へ順番にノード番号を付けている。
【0022】
L1,L2,L3は、それぞれN1−N2,N2−N3,N3−N4間の道路であり、”リンク”と呼ぶことにする。説明の便宜上、誘導経路においてN1から出発地側方向へ順番にリンク番号を付けている。自車位置はL3上にあると想定する。
【0023】
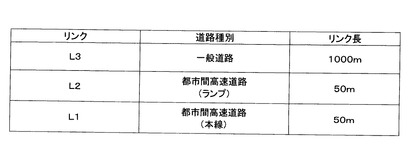
図3は図2の各リンクについて、その道路種別及びリンク長を示す図である。誘導対象地点としてのN1の手前にL1,L2というリンク長の短いリンクが存在する場合を想定している。
【0024】
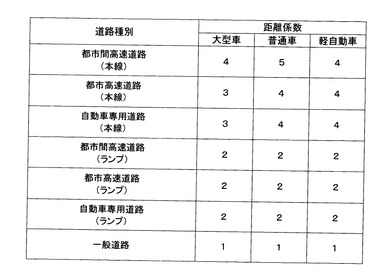
図4は道路種別と距離係数との関係を示している。距離係数は、自動車が高速で走行する道路程、大に設定されている。距離係数は、また、道路種別が同一である場合には、該道路を高速で走行できる車種の自動車程、大に設定されている。図4の場合、車種とは大型車、普通車、軽乗用車の車両サイズに係る車種となっている。
【0025】
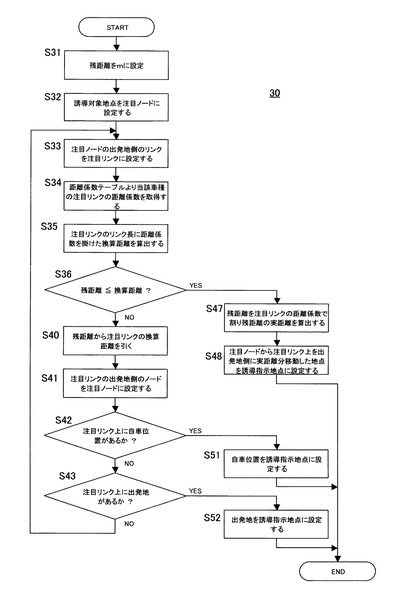
図5は誘導指示地点設定方法30のフローチャートである。誘導指示地点設定方法30及び後述の図6の誘導指示地点設定方法60は、具体的には、カーナビゲーション装置10にプログラムとして実装され、一定時間が経過するごとに、又は自動車が所定距離、走行するごとに、実行される。参考のために、自車位置が図2の状態にある場合に、誘導指示地点設定方法30を実行したときの各ステップにおけるノード、リンク及び数値等が具体的に何であるかの説明を付加する。
【0026】
S31では誘導対象地点から誘導指示地点までの距離(残距離)をmに設定する。このmは、長さの単位としてのメートルではなく、変数を意味する。具体例として、mの初期値として500を想定する。初期値は誘導指示地点設定方法30のプログラムごとの任意である。S32では、誘導対象地点を注目ノードとして設定する。具体的には、該注目ノードはN1となる。
【0027】
S33では、注目ノードの出発地側に接続しているリンクを注目リンクとして設定する。具体的には、該注目リンクとはL1となる。S34では、注目リンクの道路種別に該当する距離係数を距離係数テーブル(図4)より取得する。自車は普通車であると想定すると、L1は都市間高速道路の本線であるので、L1の距離係数は具体的には5となる。
【0028】
S35では、注目リンクのリンク長にS34で取得した距離係数を掛けた換算距離を算出する。具体的には、リンク長は50、距離係数5であるので、換算距離は、50×5=250となる。
【0029】
S36では、残距離とS35で算出した換算距離との大小を比較し、残距離>換算距離である場合は、S40へ進み、残距離≦換算距離である場合は、S47へ進む。図2の状態における誘導指示地点設定方法30の実施では、S36の1回目の実行時は、500>250であるので、S40へ進むことになる。
【0030】
S40では、残距離からS35で算出した換算距離を引く。具体的には、更新後の残距離mは、500−250=250に更新される。
【0031】
S41では、注目リンクの出発地側にあるノードを注目ノードに設定する。具体的には、注目ノードはN2に更新される。
【0032】
S42では、注目リンク上に自車位置があるか否かを判定し、判定が正であれば、S51へ進み、否であれば、S43へ進む。注目リンクは、S33で設定されたものが維持されているので、具体的には、注目リンク=L1であり、S42の判定は否である。
【0033】
S42は特殊の場合を想定している。例えば、自動車が誘導対象地点において曲折した後、すぐにまた次の交差点が、誘導対象地点となって、曲折するような誘導経路では、自車位置から該次の誘導対象地点までの距離に余裕がなく、mの初期値に対応する地点はとっくに通過済みで、該地点には誘導指示地点を設定できないという事態か起きる。そのような場合には、S51へ進み、S51において自車位置が直ちに誘導指示地点に設定される。S51の後、誘導指示地点設定方法30を終了する。
【0034】
S43では、注目リンク上に出発地があるか否かを判定し、判定が否であれば、S33へ戻って、更新後の残距離及び注目ノードに基づき同様なことを繰り返す。S43の判定が正であれば、S52へ進む。図2の状態における誘導指示地点設定方法30の実施時のS43の最初の実行では、注目リンクはL1であるので、S43の判定は否となり、S33へ戻る。
【0035】
S43は特殊の場合を想定している。例えば、ユーザが自動車のエンジンを始動し、その時の現在地は、宿泊地やショッピングセンターの駐車場等の、リンクから外れた地点となっており、かつ出発地はリンク上に設定されている場合がある。そのような場合には、S52へ進み、S52において出発地が直ちに誘導指示地点に設定される。S52の後、誘導指示地点設定方法30を終了する。
【0036】
2巡目のS31→S32→S33→S34→S35→S36→S40→S41→S41→S43では、注目ノードはN3に更新され、注目リンクはL2に更新され、注目リンクL2の距離係数は2であり、換算距離は50×2=100に更新され、残距離mは250−100=150に更新される。
【0037】
3巡目のS31→S32→S33→S34→S35→S36では、注目リンクはL3に更新され、注目リンクL3の距離係数は1であり、換算距離は1000×1=1000であり、S36における残距離と換算距離との対比は150:1000となり、150≦1000であるので、S47へ進む。
【0038】
S47では、残距離mを注目リンクの距離係数で割って残距離の実距離を算出する。具体的には、残距離m=150、注目リンクL3の距離係数=1であるので、実距離=150/1=150と算出される。
【0039】
S48では、注目ノードから注目リンク上を出発地側に実距離分移動した地点を誘導指示地点に設定する。具体的には、ノードN3からノードN4の方へ150m(←このmは、残距離のmではなく、長さの単位としてのメートルを意味する。)の地点が誘導対象地点N1に対する誘導指示地点となる。
【0040】
自車位置が誘導指示地点に到達すると、カーナビゲーション装置10のスピーカ26から、ノードN1における曲折を指示する音声案内が流れるとともに、モニタ23の画面には、視覚案内が表示される。
【0041】
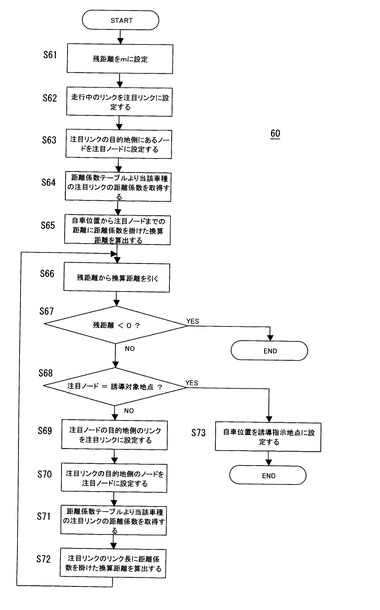
図6は別の誘導指示地点設定方法60のフローチャートである。前述の誘導指示地点設定方法30では、誘導経路において自車位置−誘導対象地点の各リンクを誘導対象地点から自車位置の方へたどって、適切な誘導指示地点を見つけたのに対し、該誘導指示地点設定方法60では、逆に、自車位置から誘導対象地点の方へたどって、適切な誘導指示地点を見つける。誘導指示地点設定方法30についての説明の場合と同様に、参考のために、自車位置が図2の状態にある場合に、誘導指示地点設定方法60を実行したときの各ステップにおけるノード、リンク及び数値等が具体的に何であるかの説明を付加する。
【0042】
S61では誘導対象地点から誘導指示地点までの距離(残距離)をmに設定する。mの具体的な初期値を例えば500とする。S62では、走行中のリンクを注目リンクに設定する。具体的には、該注目リンクはL3となる。
【0043】
S63では、注目リンクの目的地側にあるノードを注目ノードとして設定する。具体的には、該注目ノードはN3となる。S64では、注目リンクの道路種別に該当する距離係数を距離係数テーブル(図4)より取得する。自車は普通車であると想定すると、L3は一般道路であるので、L3の距離係数は1である。
【0044】
S65では、自車位置から注目ノードまでの距離に、S64で取得した距離係数を掛けた換算距離を算出する。自車位置から注目ノードまでの距離を240m(←このmは、残距離のmではなく、長さの単位としてのメートルを意味する。)と想定すると、具体的には、自車位置から注目ノードまでの距離240、距離係数1であるので、換算距離は、240×1=240となる。
【0045】
S66では、残距離からS65で算出した換算距離を引く。具体的には、更新後の残距離mは、500−240=260となる。
【0046】
S67では、残距離がゼロ未満かを判定し、残距離≧0である場合は、S68へ進み、残距離<0である場合は、誘導指示地点設定方法60を終了する。図2の状態時の誘導指示地点設定方法60の実施において、S67の1回目の実行では、260≧0であるので、S68へ進むことになる。
【0047】
S68では、注目ノードと誘導対象地点とが同一になっているか否かを判定する。この判定が正であれば、S73へ進み、否であれば、S69へ進む。具体的には、注目ノードはN3であり、誘導対象地点はN1であるので、S69へ進むことになる。
【0048】
S69では、注目ノードの目的地側のリンクを注目リンクに設定する。具体的には、注目リンクはL2に更新される。
【0049】
S70では、注目リンクの目的地側のノードを注目ノードに設定する。具体的には、注目ノードはN2に更新される。
【0050】
S71では、注目リンクの道路種別に該当する距離係数を距離係数テーブル(図4)より取得する。具体的には、注目リンクL2は都市間高速道路のランプであるので、L2の距離係数は2である。
【0051】
S72では、注目リンクのリンク長に、S71で取得した距離係数を掛けた換算距離を算出する。具体的には、注目リンクL2のリンク長=50メートル、距離係数=2であるので、換算距離=50×2=100となる。S72の次はS66へ戻る。
【0052】
2巡目のS66→S67→S68→S69→S70→S71→S72の実行では、残距離mは260−100=160に更新され、注目リンクはL1に更新され、注目ノードはN1に更新され、注目リンクL1の距離係数は5であり、換算距離は50×5=250に更新される。
【0053】
3巡目のS66では、残距離mは160−250=−90に更新され、誘導指示地点設定方法60を終了する。
【0054】
(自車位置が進み)S61→S62→S63→S64→S65→S65において、自車位置から注目ノードまでの距離を140メートルと想定すると、具体的には、注目リンクはL3であり、注目ノードはN3であり、注目リンクL3の距離係数は1であり、換算距離は140×1=140である。
【0055】
S66→S67→S68→S69→S70→S71→S72の実行では、残距離mは500−140=360に更新され、360≧0であり、注目ノードN3≠誘導対象地点であり、注目リンクはL2に更新され、注目ノードはN2に更新され、注目リンクL2の距離係数は2であり、換算距離は50×2=100である。
【0056】
2巡目のS66→S67→S68→S69→S70→S71→S72の実行では、残距離mは360−100=260に更新され、注目リンクはL1に更新され、注目ノードはN1に更新され、注目リンクL1の距離係数は5であり、換算距離は50×5=250に更新される。
【0057】
3巡目のS66→S67→S68の実行では、残距離mは260−250=10に更新され、注目ノードN1は誘導対象地点と同一であるので、S68の判定が正となり、S68からS73へ進み、S73において、自車位置が誘導指示地点に設定される。具体的には、ノードN3からノードN4の方へ140メートルの地点が誘導対象地点N1に対する誘導指示地点となる。
【0058】
誘導指示地点設定方法60では、誘導指示地点設定方法30のS42,S51に対応するステップが用意されていないが、誘導対象地点の通過後、次のノードが次の誘導対象地点となっていて、自車位置から該次の誘導対象地点までの距離が十分にない場合には、S67NO→S68YES→S73により、前の誘導対象地点を通過しだい、自車位置が誘導指示地点に設定されて、該次の誘導対象地点についての誘導指示が直ちに行われる。
【0059】
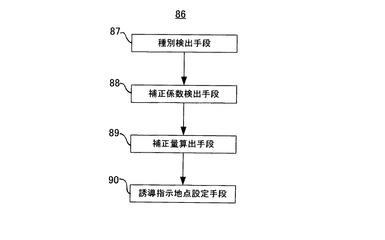
図7はカーナビゲーション装置86のブロック図である。前述のカーナビゲーション装置10はカーナビゲーション装置86の一例である。カーナビゲーション装置86は、種別検出手段87、補正係数検出手段88、補正量算出手段89及び誘導指示地点設定手段90を備えている。
【0060】
種別検出手段87は、自車位置−誘導対象地点間の誘導経路上の各誘導経路部分の種別を検出する。補正係数検出手段88は、各誘導経路部分についてその種別に応じて設定されている補正係数を検出する。
【0061】
補正量算出手段89は、自車位置−誘導対象地点間の誘導経路部分の距離を補正係数により補正した補正量を算出する。誘導指示地点設定手段90は、自車位置−誘導対象地点間の誘導経路部分の補正量に係る量と基準量との対比に基づき誘導指示地点を設定する。
【0062】
補正係数の一例は図4の距離係数である。誘導経路部分の距離を補正係数により補正した補正量の具体例は、誘導指示地点設定方法30(図5)及び誘導指示地点設定方法60(図6)において説明した換算量、すなわち誘導経路部分の距離と補正係数との積である。基準量の具体例は誘導指示地点設定方法30,50における残距離mの初期値である。
【0063】
誘導対象地点とは、ユーザが、カーナビゲーション装置86からの誘導指示に基づく運転を実行する地点であり、例えば、交差点、分岐点又は走行帯変更点等である。誘導指示地点とは、カーナビゲーション装置86がユーザに対して誘導対象地点についての誘導指示を実行する地点であり、案内地点と呼ぶこともできる。
【0064】
誘導指示地点における誘導指示は、音声による誘導に限定されない。モニタにおける視覚表示による誘導であってもよい。音声誘導の場合と視覚表示の場合とで、基準量や補正係数を別々の値に設定することにより、音声誘導の誘導指示地点と視覚表示の誘導指示地点とを、同一の地点でなく、別々の地点に設定することもできる。
【0065】
こうして、自車位置−誘導対象地点間の実際の距離に対して、それを誘導経路部分の種別に基づき補正し、補正量に係る量と所定の基準量との対比に基づき誘導指示地点を設定するので、誘導指示地点−誘導対象地点間に、種別の異なる複数の誘導経路部分が存在しても、適切な誘導指示地点を設定することができる。
【0066】
好ましくは、補正係数は、カーナビゲーション装置86を搭載する車種にも関係して設定されている。補正係数の一例としての図4の距離係数は、自動車の大きさに係る車種に関係している。例えば、高速で走行する車種ほど、距離係数は大きい値に設定されている。誘導経路部分についての補正量は、例えば、誘導経路部分について、その距離と補正係数との積である。
【0067】
好ましくは、自車位置−誘導対象地点間の誘導経路部分の補正量に係る量とは、自車位置−誘導対象地点間の誘導経路部分の補正量の積算量である。
【0068】
誘導指示地点設定手段90は、各誘導経路部分の補正量を自車位置及び誘導対象地点の一方から他方へ順番に1個ずつ積算するごとに、その積算量と基準量とを対比し、この対比に基づき誘導指示地点を設定する。
【0069】
典型的には、一方及び他方はそれぞれ誘導対象地点及び自車位置であり、誘導指示地点設定手段90は、積算量が基準量を上回ったときに、最後にその補正量を積算した誘導経路部分上に誘導指示地点を設定する。この具体例は、誘導指示地点設定方法30(図5)であり、誘導指示地点設定方法30のS36において、残距離≦換算距離とは、積算量が基準量を上回ったときに対応する。
【0070】
又は、一方及び他方はそれぞれ自車位置及び誘導対象地点であり、誘導指示地点設定手段90は、自車位置から誘導対象地点までの各誘導経路部分の補正量の積算量が前記基準量を下回ったときに自車位置を誘導指示地点に設定する。この具体例は、誘導指示地点設定方法60(図6)であり、誘導指示地点設定方法60のS67において残距離≧0であり、かつS68において注目ノードが誘導対象地点に一致したときに対応する。
【0071】
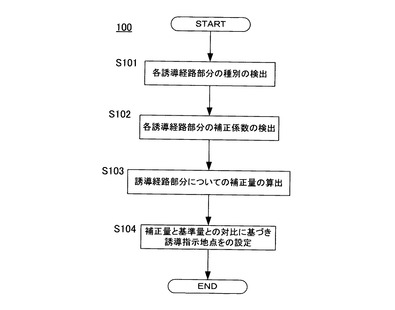
図8はカーナビゲーション装置制御方法100のフローチャートである。カーナビゲーション装置制御方法100はカーナビゲーション装置86に適用される。
【0072】
S101では、自車位置−誘導対象地点間の誘導経路上の各誘導経路部分の種別を検出する。S102では、各誘導経路部分についてその種別に応じて設定されている補正係数を検出する。
【0073】
S103では、自車位置−誘導対象地点間の誘導経路部分の距離を補正係数により補正した補正量を算出する。S104では、自車位置−誘導対象地点間の誘導経路部分の補正量に係る量と基準量との対比に基づき誘導指示地点を設定する。
【0074】
S101〜S104の処理は、カーナビゲーション装置86(図7)の種別検出手段87〜誘導指示地点設定手段90の機能にそれぞれ対応している。したがって、種別検出手段87〜誘導指示地点設定手段90の機能について述べた具体的態様はS101〜S104の処理についての具体的態様としても適用可能である。
【0075】
本発明を適用したプログラムは、コンピュータをカーナビゲーション装置86の各手段として機能させる。本発明を適用した別のプログラムは、カーナビゲーション装置制御方法100の各ステップをコンピュータに実行させる。
【0076】
本発明を最良の形態について説明したが、本発明は、これに限定されるものではなく、発明の要旨を逸脱しない範囲で最良の形態における各構成要素を変形して具体化できる。また、最良の形態に開示されている複数の構成要素の便宜な組み合わせにより、種々の発明を形成できる。本明細書が開示する発明には、最良の形態に示される全構成要素からいくつかの構成要素を削除したり、異なる最良の形態に係る構成要素同士を組み合わせたりしたものも含まれる。
【図面の簡単な説明】
【0077】
【図1】カーナビゲーション装置の模式図である。
【図2】誘導経路の所定部分の説明図である。
【図3】図2の各リンクについて、その道路種別及びリンク長を示す図である。
【図4】道路種別と距離係数との関係を示す図である。
【図5】誘導指示地点設定方法のフローチャートである。
【図6】別の誘導指示地点設定方法のフローチャートである。
【図7】カーナビゲーション装置のブロック図である。
【図8】カーナビゲーション装置制御方法のフローチャートである。
【図9】走行中道路又は交差点への進入元道路の種別に基づき交差点−誘導指示地点間距離を設定する場合の道路種別と両者間の距離との関係を示す説明図である。
【符号の説明】
【0078】
86:カーナビゲーション装置、87:種別検出手段、88:補正係数検出手段、89:補正量算出手段、90:誘導指示地点設定手段、100:カーナビゲーション装置制御方法。
【技術分野】
【0001】
本発明は、誘導対象地点の設定を改善するカーナビゲーション装置、制御方法及びプログラムに関するものである。
【背景技術】
【0002】
カーナビゲーション装置は、ディスプレイの地図画面に目的地までの誘導経路を提示して、ユーザの自動車を誘導するようになっている。誘導経路による誘導期間では、該自動車が、曲折地点等の誘導対象地点に適当な距離まで接近した時に、該誘導対象地点における進路方向についての音声や視覚表示による案内を行っている。誘導指示地点は、誘導対象地点から遠過ぎずかつ近過ぎない適切な地点に設定することが望まれる。
【0003】
特許文献1のカーナビゲーション装置は、現在、走行中の道路についてそれが一般道路及び高速道路等のどの道路種別にあるかを検知して(特許文献1の図2のフローチャートの]S103→S104又はS105)、自動速度取締り装置の設置場所(オービス位置)に対して、道路種別に対応する距離に近づくと、ユーザに警告案内を発する(特許文献1の図3及び図4のフローチャートのS203,S204,S303,S304)ようになっている。
【0004】
特許文献2のカーナビゲーション装置は、1つの誘導対象地点に対して、現在、走行中の道路の種別に応じた距離で複数の案内ポイントを設定し、該1つの誘導対象地点についての各案内ポイントにおける案内内容を変更するようになっている(特許文献2の図6の案内ポイントまでの距離及び案内内容)。
【0005】
特許文献3のカーナビゲーション装置は、走行中の道路ではなく、案内対象交差点への進入直前の道路(進入元道路)の種別に応じて区間案内許可距離を設定し(特許文献3の図5のフローチャートのS20)、案内対象交差点へ区間案内許可距離までの地点に到達すると、音声案内を実行するようになっている(特許文献3の段落0038,0057及び図5のフローチャートのS50)。
【0006】
特許文献4のカーナビゲーション装置は、分岐交差点への進入元道路の種別及び案内内容に応じて案内地点を設定するようになっている(特許文献4の図3)。
【0007】
すなわち、道路種別に基づき誘導対象地点−誘導指示地点間の距離を設定する従来方式には、(a)特許文献1,2のように、現在、走行中の道路の種別に基づく方式と、(b)特許文献3,4のように、誘導対象地点への進入元の道路の種別に基づく方式とがある。
【特許文献1】特開2000−20891号公報
【特許文献2】特開2006−90844号公報
【特許文献3】特開2000−258179号公報
【特許文献4】特開2002−202147号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
道路種別に応じた誘導指示地点の設定では、自動車が高速で走行する種別の道路程、誘導対象地点−誘導指示地点間の距離は長く設定するのが通常である。しかしながら、誘導指示地点−誘導対象地点間に種別の異なる道路が複数、存在する場合は、このような(a)及び(b)の方式共に、不都合な誘導指示地点が設定されることが起こり得る。
【0009】
この不都合について、誘導経路が、後述の本発明の好ましい実施の形態の項で詳説する図2及び図3を参照して説明する。後述するように、図2において、ノードN1は誘導対象地点であり、リンクL1〜L3の道路種別及びリンク長は図3のように想定されている。また、道路種別ごとの誘導対象地点から誘導指示地点までの距離は図9の誘導指示のタイミングとして示している。
【0010】
上述(a)の方式では、自車位置の道路は一般道であるので、誘導指示地点は、図9に示すように、誘導対象地点の手前300mの地点に設定されることになる。したがって、N1−N3間の距離は100mであるので、誘導指示地点は、ノードN3からノードN4の方へ200mの地点になる。この場合、自動車は、誘導対象地点の手前の計100mの都市高速道路本線及び都市高速道路ランプを非常に短時間で通過してしまうので、該誘導指示地点は誘導対象地点に対して不適切に近くなる。
【0011】
上述(b)の方式では、N1への進入元道路のL1は都市間高速道路本線であるので、誘導指示地点は、図9に示すように、誘導対象地点の手前1kmの地点に設定されることになる。したがって、N1−N3間の距離は100mであるので、誘導指示地点は、ノードN3からノードN4の方へ900mの地点になる。この場合、自動車が一般道の900mの走行に長大な時間を費やし、該誘導指示地点は誘導対象地点から不適切に遠くなる。
【0012】
本発明の目的は、誘導指示地点−誘導対象地点間に種別の異なる複数の道路が存在していても、適切な誘導指示地点を設定することができるカーナビゲーション装置、制御方法及びプログラムを提供することである。
【課題を解決するための手段】
【0013】
本発明によれば、道路の種別に対応して補正係数を設定し、誘導対象地点−自車位置間の各誘導経路部分について、その距離を補正係数により補正した補正量を計算する。そして、計算した補正量に係る量と所定の基準量との対比に基づき、誘導指示地点を設定する。
【0014】
本発明のカーナビゲーション装置は次の手段を備えている。
自車位置−誘導対象地点間の誘導経路上の各誘導経路部分の種別を検出する種別検出手段、
各誘導経路部分についてその種別に応じて設定されている補正係数を検出する補正係数検出手段、
自車位置−誘導対象地点間の各誘導経路部分の距離を補正係数により補正した補正量を算出する補正量算出手段、及び
自車位置−誘導対象地点間の各誘導経路部分の補正量に係る量と基準量との対比に基づき誘導指示地点を設定する誘導指示地点設定手段。
【0015】
本発明のカーナビゲーション装置制御方法は次のステップを備えている。
自車位置−誘導対象地点間の誘導経路上の各誘導経路部分の種別を検出するステップ、
各誘導経路部分についてその種別に応じて設定されている補正係数を検出するステップ、
自車位置−誘導対象地点間の各誘導経路部分の距離を補正係数により補正した補正量を算出するステップ、及び
自車位置−誘導対象地点間の各誘導経路部分の補正量に係る量と基準量との対比に基づき誘導指示地点を設定するステップ。
【0016】
本発明のプログラムは本発明の上述のカーナビゲーション装置の各手段としてコンピュータを機能させる。
【発明の効果】
【0017】
本発明によれば、誘導対象地点−自車位置間の道路について、それらの距離を種別に応じた補正係数により補正し、補正量に係る量と所定の基準量との対比に基づき誘導指示地点を設定するので、誘導対象地点−自車位置間に種別の異なる複数の誘導経路部分が存在していても、誘導対象地点から適切な地点に誘導指示地点を設定することができる。
【発明を実施するための最良の形態】
【0018】
図1はカーナビゲーション装置10の模式図である。カーナビゲーション装置10は、GPSモジュール11、VICS(Vehicle Information and Communication System)モジュール12、TVチューナ13及びハードディスク装置14を含む。GPSモジュール11は、GPS衛星からの電波に基づき自車位置を検出する。VICSモジュール12は、FM多重放送等から道路渋滞情報を受信する。
【0019】
TVチューナ13は、VHFやUHFのテレビ放送電波に係るビデオ及びオーディオ信号を出力する。ハードディスク装置14は、地図データベース15を含むとともに、CD等からダビングした楽曲データ等を適宜書き込み及び読み出し自在になっている。CD/DVDドライブ18は、音楽や地図データベース用のCDやDVDを適宜、セット自在になっている。
【0020】
処理及び制御装置21は、CPUを含み、GPSモジュール11、VICSモジュール12、TVチューナ13、ハードディスク装置14及びCD/DVDドライブ18からのデータ及び信号を受け取り、各種の処理を実行する。画像生成器22は、処理及び制御装置21から入力されるデータに基づき画像表示信号を生成して、モニタ23に出力する。D/A変換器25は、処理及び制御装置21からデジタルオーディオ信号を受け、それをアナログオーディオ信号へ変換して、スピーカ26へ出力する。
【0021】
図2は誘導経路の所定部分の説明図である。N1,N2,N3,N4は”ノード”と呼ぶことにする。ノードには、道路において複数の進み先が存在する分岐地点の他に、道路種別が切り替わる変更地点も含まれる。N1は、次の誘導対象地点であり、図2では、説明の便宜上、誘導経路においてN1から出発地側方向へ順番にノード番号を付けている。
【0022】
L1,L2,L3は、それぞれN1−N2,N2−N3,N3−N4間の道路であり、”リンク”と呼ぶことにする。説明の便宜上、誘導経路においてN1から出発地側方向へ順番にリンク番号を付けている。自車位置はL3上にあると想定する。
【0023】
図3は図2の各リンクについて、その道路種別及びリンク長を示す図である。誘導対象地点としてのN1の手前にL1,L2というリンク長の短いリンクが存在する場合を想定している。
【0024】
図4は道路種別と距離係数との関係を示している。距離係数は、自動車が高速で走行する道路程、大に設定されている。距離係数は、また、道路種別が同一である場合には、該道路を高速で走行できる車種の自動車程、大に設定されている。図4の場合、車種とは大型車、普通車、軽乗用車の車両サイズに係る車種となっている。
【0025】
図5は誘導指示地点設定方法30のフローチャートである。誘導指示地点設定方法30及び後述の図6の誘導指示地点設定方法60は、具体的には、カーナビゲーション装置10にプログラムとして実装され、一定時間が経過するごとに、又は自動車が所定距離、走行するごとに、実行される。参考のために、自車位置が図2の状態にある場合に、誘導指示地点設定方法30を実行したときの各ステップにおけるノード、リンク及び数値等が具体的に何であるかの説明を付加する。
【0026】
S31では誘導対象地点から誘導指示地点までの距離(残距離)をmに設定する。このmは、長さの単位としてのメートルではなく、変数を意味する。具体例として、mの初期値として500を想定する。初期値は誘導指示地点設定方法30のプログラムごとの任意である。S32では、誘導対象地点を注目ノードとして設定する。具体的には、該注目ノードはN1となる。
【0027】
S33では、注目ノードの出発地側に接続しているリンクを注目リンクとして設定する。具体的には、該注目リンクとはL1となる。S34では、注目リンクの道路種別に該当する距離係数を距離係数テーブル(図4)より取得する。自車は普通車であると想定すると、L1は都市間高速道路の本線であるので、L1の距離係数は具体的には5となる。
【0028】
S35では、注目リンクのリンク長にS34で取得した距離係数を掛けた換算距離を算出する。具体的には、リンク長は50、距離係数5であるので、換算距離は、50×5=250となる。
【0029】
S36では、残距離とS35で算出した換算距離との大小を比較し、残距離>換算距離である場合は、S40へ進み、残距離≦換算距離である場合は、S47へ進む。図2の状態における誘導指示地点設定方法30の実施では、S36の1回目の実行時は、500>250であるので、S40へ進むことになる。
【0030】
S40では、残距離からS35で算出した換算距離を引く。具体的には、更新後の残距離mは、500−250=250に更新される。
【0031】
S41では、注目リンクの出発地側にあるノードを注目ノードに設定する。具体的には、注目ノードはN2に更新される。
【0032】
S42では、注目リンク上に自車位置があるか否かを判定し、判定が正であれば、S51へ進み、否であれば、S43へ進む。注目リンクは、S33で設定されたものが維持されているので、具体的には、注目リンク=L1であり、S42の判定は否である。
【0033】
S42は特殊の場合を想定している。例えば、自動車が誘導対象地点において曲折した後、すぐにまた次の交差点が、誘導対象地点となって、曲折するような誘導経路では、自車位置から該次の誘導対象地点までの距離に余裕がなく、mの初期値に対応する地点はとっくに通過済みで、該地点には誘導指示地点を設定できないという事態か起きる。そのような場合には、S51へ進み、S51において自車位置が直ちに誘導指示地点に設定される。S51の後、誘導指示地点設定方法30を終了する。
【0034】
S43では、注目リンク上に出発地があるか否かを判定し、判定が否であれば、S33へ戻って、更新後の残距離及び注目ノードに基づき同様なことを繰り返す。S43の判定が正であれば、S52へ進む。図2の状態における誘導指示地点設定方法30の実施時のS43の最初の実行では、注目リンクはL1であるので、S43の判定は否となり、S33へ戻る。
【0035】
S43は特殊の場合を想定している。例えば、ユーザが自動車のエンジンを始動し、その時の現在地は、宿泊地やショッピングセンターの駐車場等の、リンクから外れた地点となっており、かつ出発地はリンク上に設定されている場合がある。そのような場合には、S52へ進み、S52において出発地が直ちに誘導指示地点に設定される。S52の後、誘導指示地点設定方法30を終了する。
【0036】
2巡目のS31→S32→S33→S34→S35→S36→S40→S41→S41→S43では、注目ノードはN3に更新され、注目リンクはL2に更新され、注目リンクL2の距離係数は2であり、換算距離は50×2=100に更新され、残距離mは250−100=150に更新される。
【0037】
3巡目のS31→S32→S33→S34→S35→S36では、注目リンクはL3に更新され、注目リンクL3の距離係数は1であり、換算距離は1000×1=1000であり、S36における残距離と換算距離との対比は150:1000となり、150≦1000であるので、S47へ進む。
【0038】
S47では、残距離mを注目リンクの距離係数で割って残距離の実距離を算出する。具体的には、残距離m=150、注目リンクL3の距離係数=1であるので、実距離=150/1=150と算出される。
【0039】
S48では、注目ノードから注目リンク上を出発地側に実距離分移動した地点を誘導指示地点に設定する。具体的には、ノードN3からノードN4の方へ150m(←このmは、残距離のmではなく、長さの単位としてのメートルを意味する。)の地点が誘導対象地点N1に対する誘導指示地点となる。
【0040】
自車位置が誘導指示地点に到達すると、カーナビゲーション装置10のスピーカ26から、ノードN1における曲折を指示する音声案内が流れるとともに、モニタ23の画面には、視覚案内が表示される。
【0041】
図6は別の誘導指示地点設定方法60のフローチャートである。前述の誘導指示地点設定方法30では、誘導経路において自車位置−誘導対象地点の各リンクを誘導対象地点から自車位置の方へたどって、適切な誘導指示地点を見つけたのに対し、該誘導指示地点設定方法60では、逆に、自車位置から誘導対象地点の方へたどって、適切な誘導指示地点を見つける。誘導指示地点設定方法30についての説明の場合と同様に、参考のために、自車位置が図2の状態にある場合に、誘導指示地点設定方法60を実行したときの各ステップにおけるノード、リンク及び数値等が具体的に何であるかの説明を付加する。
【0042】
S61では誘導対象地点から誘導指示地点までの距離(残距離)をmに設定する。mの具体的な初期値を例えば500とする。S62では、走行中のリンクを注目リンクに設定する。具体的には、該注目リンクはL3となる。
【0043】
S63では、注目リンクの目的地側にあるノードを注目ノードとして設定する。具体的には、該注目ノードはN3となる。S64では、注目リンクの道路種別に該当する距離係数を距離係数テーブル(図4)より取得する。自車は普通車であると想定すると、L3は一般道路であるので、L3の距離係数は1である。
【0044】
S65では、自車位置から注目ノードまでの距離に、S64で取得した距離係数を掛けた換算距離を算出する。自車位置から注目ノードまでの距離を240m(←このmは、残距離のmではなく、長さの単位としてのメートルを意味する。)と想定すると、具体的には、自車位置から注目ノードまでの距離240、距離係数1であるので、換算距離は、240×1=240となる。
【0045】
S66では、残距離からS65で算出した換算距離を引く。具体的には、更新後の残距離mは、500−240=260となる。
【0046】
S67では、残距離がゼロ未満かを判定し、残距離≧0である場合は、S68へ進み、残距離<0である場合は、誘導指示地点設定方法60を終了する。図2の状態時の誘導指示地点設定方法60の実施において、S67の1回目の実行では、260≧0であるので、S68へ進むことになる。
【0047】
S68では、注目ノードと誘導対象地点とが同一になっているか否かを判定する。この判定が正であれば、S73へ進み、否であれば、S69へ進む。具体的には、注目ノードはN3であり、誘導対象地点はN1であるので、S69へ進むことになる。
【0048】
S69では、注目ノードの目的地側のリンクを注目リンクに設定する。具体的には、注目リンクはL2に更新される。
【0049】
S70では、注目リンクの目的地側のノードを注目ノードに設定する。具体的には、注目ノードはN2に更新される。
【0050】
S71では、注目リンクの道路種別に該当する距離係数を距離係数テーブル(図4)より取得する。具体的には、注目リンクL2は都市間高速道路のランプであるので、L2の距離係数は2である。
【0051】
S72では、注目リンクのリンク長に、S71で取得した距離係数を掛けた換算距離を算出する。具体的には、注目リンクL2のリンク長=50メートル、距離係数=2であるので、換算距離=50×2=100となる。S72の次はS66へ戻る。
【0052】
2巡目のS66→S67→S68→S69→S70→S71→S72の実行では、残距離mは260−100=160に更新され、注目リンクはL1に更新され、注目ノードはN1に更新され、注目リンクL1の距離係数は5であり、換算距離は50×5=250に更新される。
【0053】
3巡目のS66では、残距離mは160−250=−90に更新され、誘導指示地点設定方法60を終了する。
【0054】
(自車位置が進み)S61→S62→S63→S64→S65→S65において、自車位置から注目ノードまでの距離を140メートルと想定すると、具体的には、注目リンクはL3であり、注目ノードはN3であり、注目リンクL3の距離係数は1であり、換算距離は140×1=140である。
【0055】
S66→S67→S68→S69→S70→S71→S72の実行では、残距離mは500−140=360に更新され、360≧0であり、注目ノードN3≠誘導対象地点であり、注目リンクはL2に更新され、注目ノードはN2に更新され、注目リンクL2の距離係数は2であり、換算距離は50×2=100である。
【0056】
2巡目のS66→S67→S68→S69→S70→S71→S72の実行では、残距離mは360−100=260に更新され、注目リンクはL1に更新され、注目ノードはN1に更新され、注目リンクL1の距離係数は5であり、換算距離は50×5=250に更新される。
【0057】
3巡目のS66→S67→S68の実行では、残距離mは260−250=10に更新され、注目ノードN1は誘導対象地点と同一であるので、S68の判定が正となり、S68からS73へ進み、S73において、自車位置が誘導指示地点に設定される。具体的には、ノードN3からノードN4の方へ140メートルの地点が誘導対象地点N1に対する誘導指示地点となる。
【0058】
誘導指示地点設定方法60では、誘導指示地点設定方法30のS42,S51に対応するステップが用意されていないが、誘導対象地点の通過後、次のノードが次の誘導対象地点となっていて、自車位置から該次の誘導対象地点までの距離が十分にない場合には、S67NO→S68YES→S73により、前の誘導対象地点を通過しだい、自車位置が誘導指示地点に設定されて、該次の誘導対象地点についての誘導指示が直ちに行われる。
【0059】
図7はカーナビゲーション装置86のブロック図である。前述のカーナビゲーション装置10はカーナビゲーション装置86の一例である。カーナビゲーション装置86は、種別検出手段87、補正係数検出手段88、補正量算出手段89及び誘導指示地点設定手段90を備えている。
【0060】
種別検出手段87は、自車位置−誘導対象地点間の誘導経路上の各誘導経路部分の種別を検出する。補正係数検出手段88は、各誘導経路部分についてその種別に応じて設定されている補正係数を検出する。
【0061】
補正量算出手段89は、自車位置−誘導対象地点間の誘導経路部分の距離を補正係数により補正した補正量を算出する。誘導指示地点設定手段90は、自車位置−誘導対象地点間の誘導経路部分の補正量に係る量と基準量との対比に基づき誘導指示地点を設定する。
【0062】
補正係数の一例は図4の距離係数である。誘導経路部分の距離を補正係数により補正した補正量の具体例は、誘導指示地点設定方法30(図5)及び誘導指示地点設定方法60(図6)において説明した換算量、すなわち誘導経路部分の距離と補正係数との積である。基準量の具体例は誘導指示地点設定方法30,50における残距離mの初期値である。
【0063】
誘導対象地点とは、ユーザが、カーナビゲーション装置86からの誘導指示に基づく運転を実行する地点であり、例えば、交差点、分岐点又は走行帯変更点等である。誘導指示地点とは、カーナビゲーション装置86がユーザに対して誘導対象地点についての誘導指示を実行する地点であり、案内地点と呼ぶこともできる。
【0064】
誘導指示地点における誘導指示は、音声による誘導に限定されない。モニタにおける視覚表示による誘導であってもよい。音声誘導の場合と視覚表示の場合とで、基準量や補正係数を別々の値に設定することにより、音声誘導の誘導指示地点と視覚表示の誘導指示地点とを、同一の地点でなく、別々の地点に設定することもできる。
【0065】
こうして、自車位置−誘導対象地点間の実際の距離に対して、それを誘導経路部分の種別に基づき補正し、補正量に係る量と所定の基準量との対比に基づき誘導指示地点を設定するので、誘導指示地点−誘導対象地点間に、種別の異なる複数の誘導経路部分が存在しても、適切な誘導指示地点を設定することができる。
【0066】
好ましくは、補正係数は、カーナビゲーション装置86を搭載する車種にも関係して設定されている。補正係数の一例としての図4の距離係数は、自動車の大きさに係る車種に関係している。例えば、高速で走行する車種ほど、距離係数は大きい値に設定されている。誘導経路部分についての補正量は、例えば、誘導経路部分について、その距離と補正係数との積である。
【0067】
好ましくは、自車位置−誘導対象地点間の誘導経路部分の補正量に係る量とは、自車位置−誘導対象地点間の誘導経路部分の補正量の積算量である。
【0068】
誘導指示地点設定手段90は、各誘導経路部分の補正量を自車位置及び誘導対象地点の一方から他方へ順番に1個ずつ積算するごとに、その積算量と基準量とを対比し、この対比に基づき誘導指示地点を設定する。
【0069】
典型的には、一方及び他方はそれぞれ誘導対象地点及び自車位置であり、誘導指示地点設定手段90は、積算量が基準量を上回ったときに、最後にその補正量を積算した誘導経路部分上に誘導指示地点を設定する。この具体例は、誘導指示地点設定方法30(図5)であり、誘導指示地点設定方法30のS36において、残距離≦換算距離とは、積算量が基準量を上回ったときに対応する。
【0070】
又は、一方及び他方はそれぞれ自車位置及び誘導対象地点であり、誘導指示地点設定手段90は、自車位置から誘導対象地点までの各誘導経路部分の補正量の積算量が前記基準量を下回ったときに自車位置を誘導指示地点に設定する。この具体例は、誘導指示地点設定方法60(図6)であり、誘導指示地点設定方法60のS67において残距離≧0であり、かつS68において注目ノードが誘導対象地点に一致したときに対応する。
【0071】
図8はカーナビゲーション装置制御方法100のフローチャートである。カーナビゲーション装置制御方法100はカーナビゲーション装置86に適用される。
【0072】
S101では、自車位置−誘導対象地点間の誘導経路上の各誘導経路部分の種別を検出する。S102では、各誘導経路部分についてその種別に応じて設定されている補正係数を検出する。
【0073】
S103では、自車位置−誘導対象地点間の誘導経路部分の距離を補正係数により補正した補正量を算出する。S104では、自車位置−誘導対象地点間の誘導経路部分の補正量に係る量と基準量との対比に基づき誘導指示地点を設定する。
【0074】
S101〜S104の処理は、カーナビゲーション装置86(図7)の種別検出手段87〜誘導指示地点設定手段90の機能にそれぞれ対応している。したがって、種別検出手段87〜誘導指示地点設定手段90の機能について述べた具体的態様はS101〜S104の処理についての具体的態様としても適用可能である。
【0075】
本発明を適用したプログラムは、コンピュータをカーナビゲーション装置86の各手段として機能させる。本発明を適用した別のプログラムは、カーナビゲーション装置制御方法100の各ステップをコンピュータに実行させる。
【0076】
本発明を最良の形態について説明したが、本発明は、これに限定されるものではなく、発明の要旨を逸脱しない範囲で最良の形態における各構成要素を変形して具体化できる。また、最良の形態に開示されている複数の構成要素の便宜な組み合わせにより、種々の発明を形成できる。本明細書が開示する発明には、最良の形態に示される全構成要素からいくつかの構成要素を削除したり、異なる最良の形態に係る構成要素同士を組み合わせたりしたものも含まれる。
【図面の簡単な説明】
【0077】
【図1】カーナビゲーション装置の模式図である。
【図2】誘導経路の所定部分の説明図である。
【図3】図2の各リンクについて、その道路種別及びリンク長を示す図である。
【図4】道路種別と距離係数との関係を示す図である。
【図5】誘導指示地点設定方法のフローチャートである。
【図6】別の誘導指示地点設定方法のフローチャートである。
【図7】カーナビゲーション装置のブロック図である。
【図8】カーナビゲーション装置制御方法のフローチャートである。
【図9】走行中道路又は交差点への進入元道路の種別に基づき交差点−誘導指示地点間距離を設定する場合の道路種別と両者間の距離との関係を示す説明図である。
【符号の説明】
【0078】
86:カーナビゲーション装置、87:種別検出手段、88:補正係数検出手段、89:補正量算出手段、90:誘導指示地点設定手段、100:カーナビゲーション装置制御方法。
【特許請求の範囲】
【請求項1】
自車位置−誘導対象地点間の誘導経路上の各誘導経路部分の種別を検出する種別検出手段、
各誘導経路部分についてその種別に応じて設定されている補正係数を検出する補正係数検出手段、
自車位置−誘導対象地点間の誘導経路部分の距離を補正係数により補正した補正量を算出する補正量算出手段、及び
自車位置−誘導対象地点間の誘導経路部分の補正量に係る量と基準量との対比に基づき誘導指示地点を設定する誘導指示地点設定手段、
を備えることを特徴とするカーナビゲーション装置。
【請求項2】
前記補正係数は、前記カーナビゲーション装置を搭載する車種にも関係して設定されていることを特徴とする請求項1記載のカーナビゲーション装置。
【請求項3】
自車位置−誘導対象地点間の誘導経路部分の補正量に係る量とは、自車位置−誘導対象地点間の誘導経路部分の補正量の積算量であることを特徴とする請求項1又は2記載のカーナビゲーション装置。
【請求項4】
前記誘導指示地点設定手段は、各誘導経路部分の補正量を前記自車位置及び前記誘導対象地点の一方から他方へ順番に1個ずつ積算するごとにその積算量と基準量とを対比しこの対比に基づき誘導指示地点を設定することを特徴とする請求項3記載のカーナビゲーション装置。
【請求項5】
前記一方及び前記他方はそれぞれ誘導対象地点及び自車位置であり、
前記誘導指示地点設定手段は、前記積算量が前記基準量を上回ったときに、最後にその補正量を積算した誘導経路部分上に誘導指示地点を設定することを特徴とする請求項4記載のカーナビゲーション装置。
【請求項6】
前記一方及び前記他方はそれぞれ自車位置及び誘導対象地点であり、
前記誘導指示地点設定手段は、自車位置から誘導対象地点までの各誘導経路部分の補正量の積算量が前記基準量を下回ったときに自車位置を誘導指示地点に設定することを特徴とする請求項4記載のカーナビゲーション装置。
【請求項7】
自車位置−誘導対象地点間の誘導経路上の各誘導経路部分の種別を検出するステップ、
誘導経路部分についてその種別に応じて設定されている補正係数を検出するステップ、
自車位置−誘導対象地点間の誘導経路部分の距離を補正係数により補正した補正量を算出するステップ、及び
自車位置−誘導対象地点間の誘導経路部分の補正量に係る量と基準量との対比に基づき誘導指示地点を設定するステップ、
を備えることを特徴とするカーナビゲーション装置制御方法。
【請求項8】
請求項1〜6のいずれかに記載のカーナビゲーション装置の各手段とてコンピュータを機能させるプログラム。
【請求項1】
自車位置−誘導対象地点間の誘導経路上の各誘導経路部分の種別を検出する種別検出手段、
各誘導経路部分についてその種別に応じて設定されている補正係数を検出する補正係数検出手段、
自車位置−誘導対象地点間の誘導経路部分の距離を補正係数により補正した補正量を算出する補正量算出手段、及び
自車位置−誘導対象地点間の誘導経路部分の補正量に係る量と基準量との対比に基づき誘導指示地点を設定する誘導指示地点設定手段、
を備えることを特徴とするカーナビゲーション装置。
【請求項2】
前記補正係数は、前記カーナビゲーション装置を搭載する車種にも関係して設定されていることを特徴とする請求項1記載のカーナビゲーション装置。
【請求項3】
自車位置−誘導対象地点間の誘導経路部分の補正量に係る量とは、自車位置−誘導対象地点間の誘導経路部分の補正量の積算量であることを特徴とする請求項1又は2記載のカーナビゲーション装置。
【請求項4】
前記誘導指示地点設定手段は、各誘導経路部分の補正量を前記自車位置及び前記誘導対象地点の一方から他方へ順番に1個ずつ積算するごとにその積算量と基準量とを対比しこの対比に基づき誘導指示地点を設定することを特徴とする請求項3記載のカーナビゲーション装置。
【請求項5】
前記一方及び前記他方はそれぞれ誘導対象地点及び自車位置であり、
前記誘導指示地点設定手段は、前記積算量が前記基準量を上回ったときに、最後にその補正量を積算した誘導経路部分上に誘導指示地点を設定することを特徴とする請求項4記載のカーナビゲーション装置。
【請求項6】
前記一方及び前記他方はそれぞれ自車位置及び誘導対象地点であり、
前記誘導指示地点設定手段は、自車位置から誘導対象地点までの各誘導経路部分の補正量の積算量が前記基準量を下回ったときに自車位置を誘導指示地点に設定することを特徴とする請求項4記載のカーナビゲーション装置。
【請求項7】
自車位置−誘導対象地点間の誘導経路上の各誘導経路部分の種別を検出するステップ、
誘導経路部分についてその種別に応じて設定されている補正係数を検出するステップ、
自車位置−誘導対象地点間の誘導経路部分の距離を補正係数により補正した補正量を算出するステップ、及び
自車位置−誘導対象地点間の誘導経路部分の補正量に係る量と基準量との対比に基づき誘導指示地点を設定するステップ、
を備えることを特徴とするカーナビゲーション装置制御方法。
【請求項8】
請求項1〜6のいずれかに記載のカーナビゲーション装置の各手段とてコンピュータを機能させるプログラム。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2008−216164(P2008−216164A)
【公開日】平成20年9月18日(2008.9.18)
【国際特許分類】
【出願番号】特願2007−56630(P2007−56630)
【出願日】平成19年3月7日(2007.3.7)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000003595)株式会社ケンウッド (1,981)
【Fターム(参考)】
【公開日】平成20年9月18日(2008.9.18)
【国際特許分類】
【出願日】平成19年3月7日(2007.3.7)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000003595)株式会社ケンウッド (1,981)
【Fターム(参考)】
[ Back to top ]