
カーナビゲーション装置
【課題】 目的地の位置する道路が袋小路である場合、その袋小路の道路に関する案内を行うこと。
【解決手段】 探索した経路に含まれる経由や目的地に到達する最終的な道路が袋小路であるか否かを判定し(S20)、袋小路の道路であると判定した場合、経由地や目的地に到達する道路が袋小路であることを事前に報知する袋小路事前報知機能や、その袋小路の道路へ車両が進入する際、予め指定された車両の進入方法に応じた進入案内を行う袋小路進入案内機能を実行する袋小路案内処理を行う(S40)。
【解決手段】 探索した経路に含まれる経由や目的地に到達する最終的な道路が袋小路であるか否かを判定し(S20)、袋小路の道路であると判定した場合、経由地や目的地に到達する道路が袋小路であることを事前に報知する袋小路事前報知機能や、その袋小路の道路へ車両が進入する際、予め指定された車両の進入方法に応じた進入案内を行う袋小路進入案内機能を実行する袋小路案内処理を行う(S40)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、カーナビゲーション装置に関するものである。
【背景技術】
【0002】
従来、例えば、特許文献1に開示されているように、車両が袋小路の道路(行き止まりになっている道路)に進入したとき、進行方向前方から反対向きに走行するようなUターンを含む経路を探索するナビゲーション装置が提案されている。このナビゲーション装置によれば、運転者によってUターン探索キーが押下されると、車両の進行方向にある次のノードを出発地とし、1つ手前のノードを目的地とするUターンを含む経路を探索する。
【特許文献1】特開平10−227649号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上述した、従来のナビゲーション装置によって、袋小路の道路を引き返すための経路を探索し、案内することができる。しかしながら、目的地の位置する道路(言い換えれば、目的地へ到達する最終的な道路)が袋小路である場合、その袋小路の道路に関する案内を何ら行うものではない。
【0004】
例えば、車両の運転者は、目的地の位置する道路が袋小路である場合、一般に、運転者自身の好む方法で袋小路の道路へ進入することが多い。例えば、目的地から退出し易いように後退で進入したり、或いは、前進で進入したりする。
【0005】
しかしながら、従来のナビゲーション装置は、目的地の位置する道路が袋小路であっても、その袋小路に関する案内を行わないため、車両が袋小路の道路へ進入する前に、その道路が袋小路であることを知ることができない。また、運転者の好みに応じた方法で袋小路の道路へ進入する案内を行うこともできない。
【0006】
本発明は、上記の問題を鑑みてなされたもので、目的地の位置する道路が袋小路である場合、その袋小路の道路に関する案内を行うことができるカーナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するためになされた請求項1に記載のカーナビゲーション装置は、出発地と目的地とを結ぶ経路を探索して、その経路に従った目的地への案内を行うカーナビゲーション装置であって、
経路に含まれる経由地、及び経路の目的地の少なくとも一方の地点に到達する最終的な道路が袋小路であるか否かを判定する袋小路判定手段と、
袋小路判定手段が袋小路の道路であると判定した場合、当該袋小路の道路に関する案内を行う袋小路案内手段を備えることを特徴とする。
【0008】
これにより、目的地の位置する道路が袋小路である場合、その袋小路の道路に関する案内が行われるため、ユーザは、この案内により袋小路の道路であることを把握することができる。
【0009】
請求項2に記載のカーナビゲーション装置によれば、袋小路案内手段は、経由地又は/及び目的地へ到達する最終的な道路が袋小路であることを袋小路の道路へ進入する前に報知する袋小路事前報知手段を備えることを特徴とする。これにより、ユーザは、車両が袋小路の道路へ進入する前に、袋小路の道路であることを把握することができる。
【0010】
請求項3に記載のカーナビゲーション装置は、袋小路の道路へ進入する際の車両の進入方法を指定する進入方法指定手段を備え、袋小路案内手段は、袋小路の道路へ進入する際、進入方法指定手段によって指定された車両の進入方法に応じた進入案内を行う袋小路進入案内手段を備えることを特徴とする。この進入案内に従って袋小路の道路に進入することで、ユーザは、ユーザ自身の好む方法で袋小路の道路へ進入することができる。
【0011】
請求項4に記載のカーナビゲーション装置は、道路が交差・分岐・合流する地点を示すノードの属性情報を含むノード情報と、ノード間を接続するリンクのリンク情報とを含む地図データを記憶する地図データ記憶手段を備え、袋小路判定手段は、地図データ記憶手段の記憶する地図データを用いて判定することを特徴とする。これにより、地図データを用いて、経路に含まれる経由地、及び経路の目的地の少なくとも一方の地点に到達する最終的な道路が袋小路であるか否かを判定することができる。
【0012】
請求項5に記載のカーナビゲーション装置によれば、地図データ記憶手段は、ノードの属性情報として、ノードに接続するリンクが袋小路の道路である場合に設定される袋小路フラグを含んで記憶するものであって、
袋小路判定手段は、経由地又は/及び目的地のノードの属性情報に対して袋小路フラグが設定されている場合に、経由地又は/及び目的地へ到達する最終的な道路は袋小路であると判定することを特徴とする。
【0013】
このように、ノードに接続するリンクが1つのみである場合、そのノードに接続するリンクが袋小路の道路であるとして袋小路フラグを設定しておく。これにより、袋小路フラグの設定有無に基づいて、袋小路の道路であるか否かを判定することができる。
【0014】
請求項6に記載のカーナビゲーション装置によれば、地図データ記憶手段は、ノード情報として、ノードに接続されるリンクを示す接続リンク情報を含んで記憶するものであって、
袋小路判定手段は、経由地又は/及び目的地のノードの接続リンク情報に対して、進入リンクに対する退出リンクが存在しない場合に、経由地又は/及び目的地へ到達する最終的な道路は袋小路であると判定することを特徴とする。これにより、退出リンクの有無に基づいて、袋小路の道路であるか否かを判定することができる。
【0015】
請求項7に記載のカーナビゲーション装置は、車両が袋小路の道路へ前進して進入する際に、車両のステアリングの切り返し操作が必要となるか否かを判定する切り返し判定手段を備え、
袋小路進入案内手段は、切り返し判定手段によって切り返し操作が必要となると判定された場合、進入方法指定手段によって指定された車両の進入方法に関わらず、後退による進入案内を強制的に行うことを特徴とする。
【0016】
すなわち、道幅の狭い袋小路の道路に前進して進入しようとする場合、車両を切り返して進入しなけらばならないことがある。このような場合、上述したように、ステアリンクの切り返し操作が必要となるか否かを判定し、切り返し操作が必要となると判定された場合には、指定された車両の進入方法に関わらず、後退による進入案内を行う。ユーザは、この案内された進入方法に従って車両を進入させることで、車両を切り返すことなく、袋小路の道路に進入することができる。
【0017】
請求項8に記載のカーナビゲーション装置によれば、地図データ記憶手段は、リンク情報として、道路幅員を含んで記憶するものであって、
切り返し判定手段は、袋小路の道路幅員及び車両の最小回転半径に基づいて判定することを特徴とする。これにより、袋小路の道路に前進して進入しようとする場合、車両を切り返して進入する必要があるか否かを判定することができる。
【0018】
請求項9に記載のカーナビゲーション装置によれば、袋小路進入案内手段は、車両が袋小路の道路へ後退して進入する際、袋小路の道路と接続する接続道路のセンターラインの有無に応じた進入案内を行うことを特徴とする。
【0019】
すなわち、例えば、図5(b)に示すセンターラインが敷設されていない交差道路において、目的地を右手にみながら接近する場合、自車両は、車両が袋小路の道路へ後退して進入する際には、一旦、目的地に到達する最終的な袋小路の道路を通過した後、後退して袋小路の道路に進入すればよい。
【0020】
しかしながら、図6(b)に示すセンターラインが敷設されている交差道路において、目的地を右手にみながら接近する場合、自車両は、基本的にセンターラインの左側の車線を走行する必要があるため、車両が袋小路の道路へ後退して進入する際には、一旦、目的地に到達する最終的な袋小路の道路を通過して、ある地点で折り返した後、再度、上記袋小路の道路に接近する必要がある。
【0021】
このように、袋小路の道路と接続する接続道路にセンターラインが敷設されているか否かによって、接続道路の走行方法が異なる。従って、接続道路のセンターラインの有無に応じた進入案内を行うことで、接続道路のセンターラインの有無に応じた適切な進入案内が可能となる。
【0022】
請求項10に記載のカーナビゲーション装置によれば、袋小路進入案内手段は、車両が袋小路の道路へ後退して進入する際、車両が袋小路の道路への進入地点を通過する前の段階で、車両の後方から接近する接近車両が存在する場合には、進入方法指定手段によって指定された車両の進入方法に関わらず、前進による進入案内を強制的に行うことを特徴とする。これにより、後方から接近する接近車両によって追突されるリスクを低くすることができる。
【0023】
請求項11に記載のカーナビゲーション装置によれば、袋小路案内手段は、車両が袋小路の道路を走行して経由地又は/及び目的地に到達した後にその地点から退出する際、袋小路の道路へ進入したときの進入方法に応じた袋小路の道路からの退出案内を行う袋小路退出案内手段を備えることを特徴とする。
【0024】
これにより、例えば、袋小路の道路に前進して進入した場合には後退して退出する案内を行い、一方、袋小路の道路に後退して進入した場合には前進して退出する案内を行うことができる。
【0025】
請求項12に記載のカーナビゲーション装置によれば、袋小路案内手段は、袋小路の道路と、経由地又は/及び目的地とを示す地図を表示画面に表示する表示制御手段を備えることを特徴とする。これにより、ユーザは、袋小路の道路と経由地や目的地の位置関係を視覚的に認識することができる。
【発明を実施するための最良の形態】
【0026】
以下、本発明のカーナビゲーション装置に関して、図面に基づいて説明する。
【0027】
(第1の実施形態)
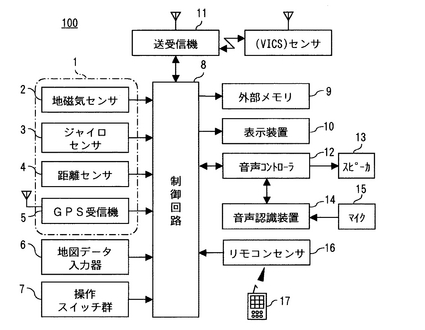
図1は、本実施形態に係わるカーナビゲーション装置の概略構成を示すブロック図である。同図に示すように、本実施形態のカーナビゲーション装置100は、位置検出器1、地図データ入力器6、操作スイッチ群7、外部メモリ9、表示装置10、送受信機11、音声コントローラ12、スピーカ13、音声認識装置14、マイク15、リモコンセンサ16、リモートコントロール端末(以下リモコン)17、及びこれらと接続する制御回路8によって構成される。
【0028】
制御装置8は、通常のコンピュータとして構成されており、内部には周辺のCPU、ROM、RAM、I/O及びこれらの構成を接続するバスライン(何れも図示せず)が備えられている。この制御装置8は、位置検出器1、地図データ入力部6、操作スイッチ群7、外部メモリ9、表示装置10、送受信機11、音声コントローラ12、スピーカ13、音声認識装置14、リモコンセンサ16から入力された各種情報に基づき、所定の処理(例えば、地図縮尺変更処理、メニュー表示選択処理、目的地設定処理、経路探索実行処理、経路案内開始処理、現在位置修正処理、表示画面変更処理、音量調整処理等)を実行する。
【0029】
位置検出器1は、何れも周知の地磁気センサ2、ジャイロセンサ3、距離センサ4、及び衛星からの電波に基づいて車両の現在位置を検出するGPS(Global Positioning System)のためのGPS受信機5を有している。これら各センサは、各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用するように構成されている。なお、各センサの精度によっては位置検出器1を上述した内の一部で構成してもよく、更に、図示しないステアリングの回転センサ、各転動輪の車速センサ等を用いてもよい。
【0030】
地図データ入力器6は、道路ネットワークデータ、索引データ、描画データ等によって構成される地図データを入力するための装置であり、制御回路8からの要請により各種データを送信する。これら各種データを記憶する記憶媒体としては、そのデータ量からCD−ROMまたはDVD−ROMが一般的であるが、メモリカード、ハードディスク等の書き込み可能な記憶媒体を採用してもよい。ここで、道路ネットワークデータを構成するリンク情報とノード情報、索引データ、及び描画データについて説明する。
【0031】
先ず、リンクとは、地図上の各道路を交差・分岐・合流する点等の複数のノードにて分割し、それぞれのノード間をリンクとして規定されるものであり、このリンクを接続することにより道路を構成する。リンク情報は、リンクを特定する固有番号(リンクID)、リンクの長さを示すリンク長、リンクの始端及び終端ノード座標(緯度・経度)、道路名称、道路種別(高速道路、有料道路、国道、都道府県道等)、道路幅員、リンク旅行時間(徒歩や自動車で移動した場合の移動時間)等の各データから構成される。
【0032】
一方、ノード情報は、地図上の各道路が交差・分岐・合流するノード毎に固有の番号を付したノードID、ノード座標(緯度・経度)、ノードに接続する全てのリンクのリンクIDが記述される接続リンク、ノードに接続するリンクが袋小路の道路である場合に設定される袋小路フラグを示すノード属性等の各種情報から構成される。このように、ノードに接続するリンクが1つのみである場合には、そのノードに接続するリンクが袋小路の道路であるとして袋小路フラグを設定しておく。
【0033】
索引データは、施設等の検索に用いられるデータであり、施設、道路、道路の分岐・合流・交差する地点等の名称、施設種別、住所、電話番号、位置(緯度・経度)等の情報で構成されている。描画データは、地図表示に用いられるデータであり、海(湖、池等も含む)や山等の地形、施設、道路、道路の分岐地点、道路の合流地点、道路の交差点等の表示文字、表示位置(緯度・経度)、ポリゴン、目印(ランドマーク等)の情報で構成されている。
【0034】
操作スイッチ群7は、例えば、表示装置10と一体になったタッチスイッチもしくはメカニカルなスイッチ等が用いられ、スイッチ操作により制御装置8へ各種機能(例えば、地図縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整等)の操作指示を行う。
【0035】
また、リモコン17には、複数の操作スイッチが設けられ、スイッチ操作によりリモコンセンサ16を介して各種指令信号を制御装置8に入力し、制御装置8は、この各種指令信号に従って各種機能を実行する。なお、操作スイッチ群7とリモコン17は、何れのスイッチ操作によっても制御装置8に同じ機能を実行させることが可能である。
【0036】
制御装置8は、リモコン17を介してリモコンセンサ16から、あるいは操作スイッチ群7により目的地が設定されると、位置検出器1により検出された現在位置(出発地)と目的地とを結ぶ最適な経路を自動的に探索して案内経路を設定し表示する。このような案内経路を設定する手法は、ダイクストラ法等の手法が知られている。なお、出発地と目的地とを結ぶ経路内に経由地を設定することもできる。
【0037】
この設定された案内経路は、地図データ入力器6の地図データに基づき、表示装置10に表示される地図上に、位置検出器1により検出された現在位置マークと共に重畳表示される。表示装置10に表示される地図には、現在位置、経路の他、現在時刻、渋滞情報など他の情報表示も付加表示することができる。
【0038】
外部メモリ9は、HDD(Hard Disk Drive)等の書き込み可能な大容量記憶装置である。この外部メモリ9には、大量のデータが記憶される他、カーナビゲーション装置100への電源がOFFされても保持すべきデータを記憶したり、頻繁に使用するデータを地図データ入力器6からコピーして利用したりする。なお、外部メモリ9は、比較的記憶容量の小さいリムーバルなメモリであってもよい。
【0039】
表示装置10は、地図画面や目的地選択画面等を表示するものであって、フルカラー表示が可能なものであり、液晶、有機EL等を用いて構成することができる。
【0040】
送受信機置11は、外部(例えば、VICSシステムなどのインフラ)から提供される交通情報、気象情報、施設情報、広告情報等を受信したり、車両情報やユーザ情報等を外部へ発信したりする装置である。この送受信装置11によって外部から受け取った情報は、制御装置8で処理される。また、制御装置8で処理した情報を送受信機11から出力することもできるように構成されている。
【0041】
スピーカ13は、音声コントローラ12から入力された音声出力信号に基づいて、所定の音声(案内のための音声や画面操作の説明、音声認識結果等)を外部に報知する。マイク15は、ユーザが発声した音声を電気信号として音声認識装置14に入力する。
【0042】
音声認識装置14は、マイク15を介し発声されたユーザの入力音声と、内部に記憶する認識辞書(図示せず)中の語彙データ(比較対象パターン)とを照合し、最も一致度の高いものを認識結果として音声コントローラ12に入力する。
【0043】
音声コントローラ12は、音声認識装置14を制御すると共に、音声入力のあったユーザに対し、スピーカ13を通じてトークバック出力制御(音声出力)する。また、音声認識装置14の認識結果を制御装置8に入力する処理も行う。
【0044】
制御装置8は、音声認識装置14からの情報に基づいて、ユーザの発声に対する所定の処理(例えば、地図縮尺変更処理、メニュー表示選択処理、目的地設定処理、経路探索実行処理、経路案内開始処理、現在位置修正処理、表示画面変更処理、音量調整処理等)を実行する。また、制御装置8で処理された経路案内音声情報等は、音声コントローラ12を介してスピーカ13から適宜報知される。
【0045】
このような構成を備えるカーナビゲーション装置100は、上記経路探索実行処理によって探索された出発地と目的地とを結ぶ経路について、その経路に含まれる経由地、及び目的地の少なくとも一方の地点に到達する最終的な道路が袋小路であるか否かを判定する袋小路判定処理を実行する。そして、経由地や目的地に到達する最終的な道路が袋小路である場合、経路案内開始処理が実行されると、その袋小路に関する案内を行う袋小路案内処理を実行する。
【0046】
この袋小路案内処理は、経由地や目的地に到達する袋小路の道路へ進入するまでの距離が所定距離以下となった時点で袋小路の道路であることを事前に報知する袋小路事前報知機能と、その袋小路の道路へ車両が進入する際、予め指定された車両の進入方法に応じた進入案内を行う袋小路進入案内機能とを実行する。
【0047】
上記袋小路事前報知機能を実行することにより、ユーザは、経由地や目的地に到達する袋小路の道路へ進入する前に、その進入しようとする道路が袋小路であることを把握することができる。
【0048】
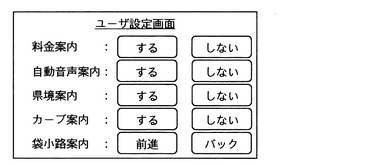
なお、車両の進入方法は、例えば、図2に示すようなユーザ設定画面において、経路探索実行処理が開始される前に予め指定する。同図に示すように、「袋小路案内」として、袋小路の道路へ進入する際の車両の進入方法(”前進”か”バック”)を指定させる。袋小路進入案内機能では、このユーザ設定画面にて指定された進入方法に応じた進入案内を行う。これにより、ユーザは、この袋小路進入案内機能により案内される進入案内に従って袋小路の道路に進入することで、ユーザ自身の好む方法で袋小路の道路へ進入することができる。
【0049】
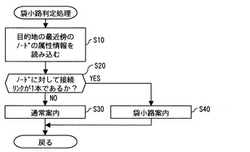
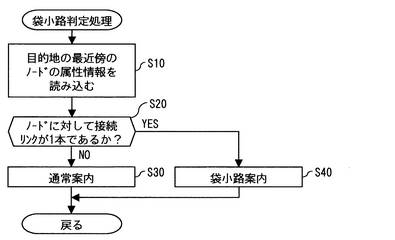
次に、カーナビゲーション装置100の袋小路判定処理について、図3に示すフローチャートを用いて説明する。この袋小路判定処理では、ノード情報とリンク情報とを含む地図データを用いて、経由地や目的地に到達する最終的な道路が袋小路であるか否かを判定する。なお、以下の説明では、目的地に対する処理を例に説明するが、経由地についても同様の処理を行えばよいため、経由地に対する処理の説明を省略する。
【0050】
先ず、図3のステップ(以下、Sと記す)10では、上記経路探索実行処理によって探索された経路における目的地(或いは、目的地の最近傍)のノード(上記探索された経路の最端部のノード)の属性情報を読み込む。S20では、S10において読み込んだ属性情報を参照して、そのノードに接続するリンクが1つのみであるか否か、すなわち、上記ノードに袋小路フラグが設定されているか否かを判定する。ここで、肯定判定された場合にはS40へ処理を進め、経路案内開始処理の開始後、袋小路案内処理を実行する。一方、否定判定された場合には、経路案内開始処理の開始後、通常の経路案内を実行する。
【0051】
このように、ノードの属性情報として袋小路フラグを設定しておくことで、袋小路フラグの設定有無に基づいて、袋小路の道路であるか否かを判定することができる。なお、この袋小路の道路についての判定は、ノード情報の接続リンクに基づいて判定するようにしてもよい。すなわち、ノードの接続リンクに対して、進入リンクに対する退出リンクが存在しない場合に、目的地へ到達する最終的な道路は袋小路であると判定するようにしてもよい。これにより、退出リンクの有無に基づいて、袋小路の道路であるか否かを判定することができる。
【0052】
この袋小路判定処理の後に実行される袋小路案内処理では、先ず、経由地や目的地に到達する袋小路の道路へ進入するまでの距離が所定距離以下となった時点で、袋小路の道路であることを事前に報知する袋小路事前報知機能を実行する。
【0053】
この袋小路事前報知機能では、例えば、袋小路の道路へ進入するまでの距離が所定距離以下となったとき、経由地や目的地を示すマークと、この地点に到達する袋小路の道路とを示す地図を表示装置10の表示画面に表示するとともに、経由地や目的地へ到達するために最終的に走行する道路が袋小路であることを音声で報知する。これにより、ユーザは、経由地や目的地へ到達するために最終的に走行する道路が袋小路であることを把握することができるとともに、袋小路の道路と経由地や目的地の位置関係を視覚的に認識することができる。
【0054】
次に、袋小路事前報知機能が実行されると、袋小路の道路への進入案内を行う袋小路進入案内機能を実行する。この袋小路進入案内機能では、上記袋小路事前報知機能と同様に、経由地や目的地を示すマークと、この地点に到達する袋小路の道路とを示す地図を表示画面に表示するとともに、画面表示と音声とを用いて、袋小路の道路への進入方法を案内する。
【0055】
なお、袋小路進入案内機能では、予め指定された車両の進入方法、及び、進入しようとする袋小路の道路と接続する接続道路のセンターラインの有無に応じた進入案内を行う。以下、目的地へ到達する最終的な道路が袋小路であり、その袋小路の道路に接続する接続道路が交差道路である場合の進入案内について説明する。
【0056】
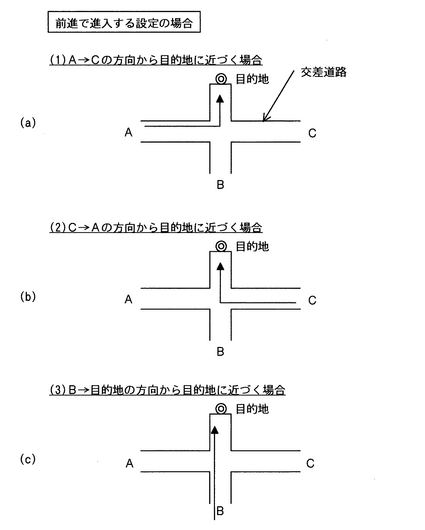
図4(a)〜(c)は、袋小路の道路への車両の進入方法として”前進”が指定(設定)された場合の進入案内の例である。同図(a)は、Aの方向から目的地へ到達するように経路が設定された場合の進入案内の例であり、同図(b)は、Cの方向から目的地へ到達するように経路が設定された場合の進入案内の例である。また、同図(c)は、Bの方向から目的地へ到達するように経路が設定された場合の進入案内の例である。
【0057】
このように、袋小路の道路への車両の進入方法として”前進”が指定(設定)された場合には、袋小路の道路と接続する接続道路(図4では交差道路)のセンターラインの有無に係らず、交通規則に従った進入案内を行えばよい。
【0058】
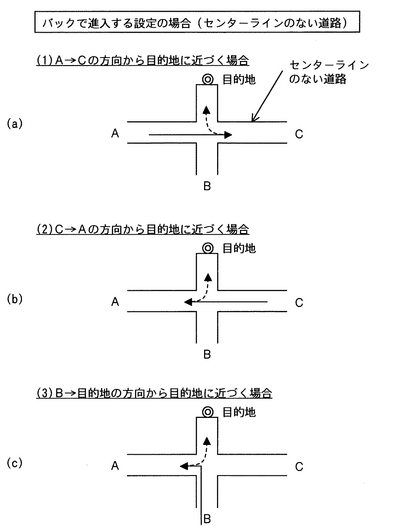
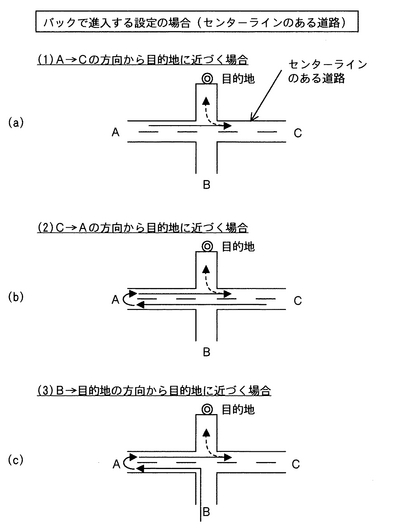
一方、袋小路の道路への車両の進入方法として”バック(後退)”が指定(設定)された場合には、次のような進入案内を行う。図5(a)、図6(a)は、Aの方向から目的地へ到達するように経路が設定された場合の進入案内の例であるが、この場合には、交差道路のセンターラインの有無に係らず、交通規則に従った進入案内を行えばよい。
【0059】
なお、図5(a)、図6(a)のように、後退して袋小路の道路へ進入する場合には、例えば、「目的地は袋小路になっています。バックで進入する際は回りの状況をよく確認してください。」などのメッセージを音声で案内するとよい。
【0060】
図5(b)、図6(b)は、Cの方向から目的地へ到達するように経路が設定された場合の進入案内の例である。図5(b)に示すセンターラインの無い交差道路においては、一旦、袋小路の道路を通過した後、後退して袋小路の道路に進入する案内を行えばよい。また、図6(b)に示すセンターラインの有る交差道路においては、一旦、袋小路の道路を通過して、ある地点で折り返した後、再度、袋小路の道路に接近する必要がある。
【0061】
すなわち、センターラインが敷設されている交差道路において、目的地を右手にみながら接近する場合、自車両は、基本的にセンターラインの左側の車線を走行する必要があるため、車両が袋小路の道路へ後退して進入する際には、一旦、目的地に到達する最終的な袋小路の道路を通過して、ある地点で折り返した後、再度、上記袋小路の道路に接近する必要がある。そのため、図6(b)に示すように、ある地点で折り返す案内を行う。
【0062】
なお、図5(b)、図6(b)のように、一旦、目的地に到達する最終的な袋小路の道路を通過した後、後退して袋小路の道路へ進入する場合には、例えば、「目的地は袋小路になっています。バックで進入しますので、一旦交差点を通過します。」などのメッセージを音声で案内するとよい。
【0063】
また、図5(c)、図6(c)は、Bの方向から目的地へ到達するように経路が設定された場合の進入案内の例である。図5(c)に示すセンターラインの無い交差道路においては、Aの方向へ左折した後、後退して袋小路の道路に進入する案内を行えばよい。これに対し、図6(c)に示すセンターラインの有る交差道路においては、Aの方向へ左折した後、ある地点で折り返し、再度、袋小路の道路に接近して進入する案内を行う。この図6(c)の進入案内については、Cの方向へ右折した後、後退して袋小路の道路へ進入する方法も可能であるが、この進入方法の場合、車両の後方から接近する接近車両が存在する場合、その接近車両によって追突されるリスクがある。従って、本実施形態では、Aの方向へ左折する案内としている。
【0064】
このように、袋小路の道路と接続する接続道路(図5、図6では交差道路)にセンターラインが敷設されているか否かによって、接続道路の走行方法が異なる。従って、接続道路のセンターラインの有無に応じた進入案内を行うことで、接続道路のセンターラインの有無に応じた適切な進入案内が可能となる。
【0065】
このように、本実施形態のナビゲーション装置100は、探索した経路に含まれる経由や目的地に到達する最終的な道路が袋小路であるか否かを判定し、袋小路の道路であると判定した場合、経由地や目的地に到達する道路が袋小路であることを事前に報知する袋小路事前報知機能や、その袋小路の道路へ車両が進入する際、予め指定された車両の進入方法に応じた進入案内を行う袋小路進入案内機能を実行する袋小路案内処理を行う。
【0066】
これにより、経由地や目的地の位置する道路が袋小路である場合、その袋小路の道路に関する案内が行われるため、ユーザは、この案内により袋小路の道路であることを把握することができる。
【0067】
(変形例1)
本実施形態のカーナビゲーション装置100による袋小路案内処理は、車両が袋小路の道路に位置する経由地や目的地に到達するまでの案内を行うものであるが、この経由地や目的地の位置する袋小路の道路から退出(出発)する際に、退出案内を行うようにしてもよい。
【0068】
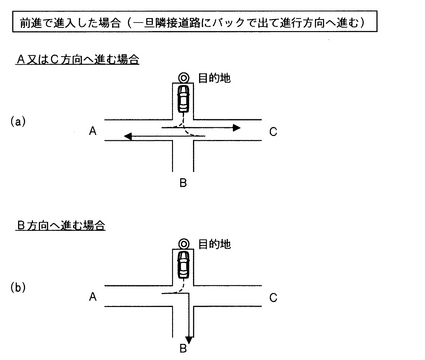
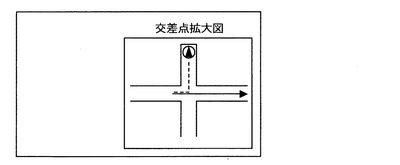
例えば、袋小路の道路へ後退して進入した場合には、前進して退出する通常の案内を行えばよい。これに対し、袋小路の道路へ前進して進入した場合には、図7に示すように、退出後に進む方向に応じた退出案内を行う。図7(a)は、退出後にA又はCの方向へ進む場合の退出案内の例を示し、また、図7(b)は、退出後にBの方向へ進む場合の退出案内の例を示している。この退出案内においては、図8に示すように、交差点拡大地図に、一旦、後退して接続道路へ退出するイメージを重ねて表示して案内する。
【0069】
このように、経由地や目的地に到達した後にその地点から退出する際、袋小路の道路へ進入したときの進入方法に応じた袋小路の道路からの退出案内を行うことで、袋小路の道路に前進して進入した場合には後退して退出する案内を行い、一方、袋小路の道路に後退して進入した場合には前進して退出する案内を行うことができる。
【0070】
なお、袋小路の道路に接続される接続道路を走行する接近車両の存在を検知して、その検知した接近車両の情報を表示や音声を用いて報知するようにしてもよい。この接近車両の検知については、例えば、送受信機11を介して外部から接近車両の情報を取得したり、自車両の後部にレーダを備え、このレーダによって接近車両を検知したりすればよい。
【0071】
(変形例2)
本実施形態のカーナビゲーション装置100による袋小路案内処理は、袋小路の道路へ車両が進入する際、予め指定された車両の進入方法に応じた進入案内を行うものであるが、例えば、袋小路の道路へ後退して進入する際、車両の後方から他車両が接近する場合には、この接近車両によって追突されるリスクがある。
【0072】
従って、袋小路の道路へ後退して進入する際、車両が袋小路の道路への進入地点を通過する前の段階で、車両の後方から接近する接近車両が存在する場合には、予め指定された車両の進入方法に関わらず、前進による進入案内を強制的に行うようにしてもよい。これにより、後方から接近する接近車両によって追突されるリスクを低くすることができる。
【0073】
(変形例3)
例えば、道幅の狭い袋小路の道路へ前進して進入する場合、車両を切り返して進入しなければならないことがあるが、車両の切り返しは、ステアリング操作の負担が増えるため、ユーザにとって好ましくない。
【0074】
そこで、本変形例のカーナビゲーション装置100による袋小路案内処理では、車両の進入方法として”前進”が指定されている場合には、上記経由地や目的地に到達する袋小路の道路に前進して進入する際に、車両のステアリングの切り返し操作が必要となるか否かを判定する。
【0075】
この判定においては、先ず、地図データのリンク情報に含まれる道路幅員から、袋小路の道路の幅員と、袋小路の道路に接続される接続道路の幅員とを参照して、自車両が転回して袋小路の道路へ進入する際に用いることのできる転回スペースの広さを算出する。一方、車両の最小回転半径に基づいて、車両が転回する際に必要となる必要スペースの広さを算出する。
【0076】
そして、上記転回スペースが上記必要スペースを包含するか否かを判定する。この判定の結果、包含すると判定される場合には、車両を切り返すことなく、ステアリングを末切りした状態を保持して袋小路の道路へ前進して進入すること、すなわち、転回して進入することが可能であることがわかる。一方、包含しないと判定される場合には、車両を切り返す必要があるため、車両の進入方法として”前進”が指定されている場合であっても、後退による進入案内を行うようにする。
【0077】
これにより、袋小路の道路に前進して進入しようとする場合、車両を切り返して進入する必要があるか否かを判定することができる。なお、車両の最小回転半径は、外部メモリ9に予め記憶しておけばよい。
【図面の簡単な説明】
【0078】
【図1】カーナビゲーション装置100の全体構成を示すブロック図である。
【図2】ユーザ設定画面の表示例を示す図である。
【図3】袋小路判定処理の流れを示すフローチャートである。
【図4】(a)〜(c)は、交差道路から前進して進入する場合の進入案内の例を示す図である。
【図5】(a)〜(c)は、センターラインの無い交差道路からバックで進入する場合の進入案内の例を示す図である。
【図6】(a)〜(c)は、センターラインの有る交差道路からバックで進入する場合の進入案内の例を示す図である。
【図7】(a)は、退出後にA又はCの方向へ進む場合の退出案内の例を示した図であり、(b)は、退出後にBの方向へ進む場合の退出案内の例を示した図である。
【図8】交差点拡大地図を示す図である。
【符号の説明】
【0079】
1 位置検出器
6 地図データ入力器
7 操作スイッチ群
8 制御回路
9 外部メモリ
10 表示装置
11 送受信機
12 音声コントローラ
13 スピーカ
14 音声認識装置
15 マイク
16 リモコンセンサ
17 リモコン
100 カーナビゲーション装置
【技術分野】
【0001】
本発明は、カーナビゲーション装置に関するものである。
【背景技術】
【0002】
従来、例えば、特許文献1に開示されているように、車両が袋小路の道路(行き止まりになっている道路)に進入したとき、進行方向前方から反対向きに走行するようなUターンを含む経路を探索するナビゲーション装置が提案されている。このナビゲーション装置によれば、運転者によってUターン探索キーが押下されると、車両の進行方向にある次のノードを出発地とし、1つ手前のノードを目的地とするUターンを含む経路を探索する。
【特許文献1】特開平10−227649号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上述した、従来のナビゲーション装置によって、袋小路の道路を引き返すための経路を探索し、案内することができる。しかしながら、目的地の位置する道路(言い換えれば、目的地へ到達する最終的な道路)が袋小路である場合、その袋小路の道路に関する案内を何ら行うものではない。
【0004】
例えば、車両の運転者は、目的地の位置する道路が袋小路である場合、一般に、運転者自身の好む方法で袋小路の道路へ進入することが多い。例えば、目的地から退出し易いように後退で進入したり、或いは、前進で進入したりする。
【0005】
しかしながら、従来のナビゲーション装置は、目的地の位置する道路が袋小路であっても、その袋小路に関する案内を行わないため、車両が袋小路の道路へ進入する前に、その道路が袋小路であることを知ることができない。また、運転者の好みに応じた方法で袋小路の道路へ進入する案内を行うこともできない。
【0006】
本発明は、上記の問題を鑑みてなされたもので、目的地の位置する道路が袋小路である場合、その袋小路の道路に関する案内を行うことができるカーナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するためになされた請求項1に記載のカーナビゲーション装置は、出発地と目的地とを結ぶ経路を探索して、その経路に従った目的地への案内を行うカーナビゲーション装置であって、
経路に含まれる経由地、及び経路の目的地の少なくとも一方の地点に到達する最終的な道路が袋小路であるか否かを判定する袋小路判定手段と、
袋小路判定手段が袋小路の道路であると判定した場合、当該袋小路の道路に関する案内を行う袋小路案内手段を備えることを特徴とする。
【0008】
これにより、目的地の位置する道路が袋小路である場合、その袋小路の道路に関する案内が行われるため、ユーザは、この案内により袋小路の道路であることを把握することができる。
【0009】
請求項2に記載のカーナビゲーション装置によれば、袋小路案内手段は、経由地又は/及び目的地へ到達する最終的な道路が袋小路であることを袋小路の道路へ進入する前に報知する袋小路事前報知手段を備えることを特徴とする。これにより、ユーザは、車両が袋小路の道路へ進入する前に、袋小路の道路であることを把握することができる。
【0010】
請求項3に記載のカーナビゲーション装置は、袋小路の道路へ進入する際の車両の進入方法を指定する進入方法指定手段を備え、袋小路案内手段は、袋小路の道路へ進入する際、進入方法指定手段によって指定された車両の進入方法に応じた進入案内を行う袋小路進入案内手段を備えることを特徴とする。この進入案内に従って袋小路の道路に進入することで、ユーザは、ユーザ自身の好む方法で袋小路の道路へ進入することができる。
【0011】
請求項4に記載のカーナビゲーション装置は、道路が交差・分岐・合流する地点を示すノードの属性情報を含むノード情報と、ノード間を接続するリンクのリンク情報とを含む地図データを記憶する地図データ記憶手段を備え、袋小路判定手段は、地図データ記憶手段の記憶する地図データを用いて判定することを特徴とする。これにより、地図データを用いて、経路に含まれる経由地、及び経路の目的地の少なくとも一方の地点に到達する最終的な道路が袋小路であるか否かを判定することができる。
【0012】
請求項5に記載のカーナビゲーション装置によれば、地図データ記憶手段は、ノードの属性情報として、ノードに接続するリンクが袋小路の道路である場合に設定される袋小路フラグを含んで記憶するものであって、
袋小路判定手段は、経由地又は/及び目的地のノードの属性情報に対して袋小路フラグが設定されている場合に、経由地又は/及び目的地へ到達する最終的な道路は袋小路であると判定することを特徴とする。
【0013】
このように、ノードに接続するリンクが1つのみである場合、そのノードに接続するリンクが袋小路の道路であるとして袋小路フラグを設定しておく。これにより、袋小路フラグの設定有無に基づいて、袋小路の道路であるか否かを判定することができる。
【0014】
請求項6に記載のカーナビゲーション装置によれば、地図データ記憶手段は、ノード情報として、ノードに接続されるリンクを示す接続リンク情報を含んで記憶するものであって、
袋小路判定手段は、経由地又は/及び目的地のノードの接続リンク情報に対して、進入リンクに対する退出リンクが存在しない場合に、経由地又は/及び目的地へ到達する最終的な道路は袋小路であると判定することを特徴とする。これにより、退出リンクの有無に基づいて、袋小路の道路であるか否かを判定することができる。
【0015】
請求項7に記載のカーナビゲーション装置は、車両が袋小路の道路へ前進して進入する際に、車両のステアリングの切り返し操作が必要となるか否かを判定する切り返し判定手段を備え、
袋小路進入案内手段は、切り返し判定手段によって切り返し操作が必要となると判定された場合、進入方法指定手段によって指定された車両の進入方法に関わらず、後退による進入案内を強制的に行うことを特徴とする。
【0016】
すなわち、道幅の狭い袋小路の道路に前進して進入しようとする場合、車両を切り返して進入しなけらばならないことがある。このような場合、上述したように、ステアリンクの切り返し操作が必要となるか否かを判定し、切り返し操作が必要となると判定された場合には、指定された車両の進入方法に関わらず、後退による進入案内を行う。ユーザは、この案内された進入方法に従って車両を進入させることで、車両を切り返すことなく、袋小路の道路に進入することができる。
【0017】
請求項8に記載のカーナビゲーション装置によれば、地図データ記憶手段は、リンク情報として、道路幅員を含んで記憶するものであって、
切り返し判定手段は、袋小路の道路幅員及び車両の最小回転半径に基づいて判定することを特徴とする。これにより、袋小路の道路に前進して進入しようとする場合、車両を切り返して進入する必要があるか否かを判定することができる。
【0018】
請求項9に記載のカーナビゲーション装置によれば、袋小路進入案内手段は、車両が袋小路の道路へ後退して進入する際、袋小路の道路と接続する接続道路のセンターラインの有無に応じた進入案内を行うことを特徴とする。
【0019】
すなわち、例えば、図5(b)に示すセンターラインが敷設されていない交差道路において、目的地を右手にみながら接近する場合、自車両は、車両が袋小路の道路へ後退して進入する際には、一旦、目的地に到達する最終的な袋小路の道路を通過した後、後退して袋小路の道路に進入すればよい。
【0020】
しかしながら、図6(b)に示すセンターラインが敷設されている交差道路において、目的地を右手にみながら接近する場合、自車両は、基本的にセンターラインの左側の車線を走行する必要があるため、車両が袋小路の道路へ後退して進入する際には、一旦、目的地に到達する最終的な袋小路の道路を通過して、ある地点で折り返した後、再度、上記袋小路の道路に接近する必要がある。
【0021】
このように、袋小路の道路と接続する接続道路にセンターラインが敷設されているか否かによって、接続道路の走行方法が異なる。従って、接続道路のセンターラインの有無に応じた進入案内を行うことで、接続道路のセンターラインの有無に応じた適切な進入案内が可能となる。
【0022】
請求項10に記載のカーナビゲーション装置によれば、袋小路進入案内手段は、車両が袋小路の道路へ後退して進入する際、車両が袋小路の道路への進入地点を通過する前の段階で、車両の後方から接近する接近車両が存在する場合には、進入方法指定手段によって指定された車両の進入方法に関わらず、前進による進入案内を強制的に行うことを特徴とする。これにより、後方から接近する接近車両によって追突されるリスクを低くすることができる。
【0023】
請求項11に記載のカーナビゲーション装置によれば、袋小路案内手段は、車両が袋小路の道路を走行して経由地又は/及び目的地に到達した後にその地点から退出する際、袋小路の道路へ進入したときの進入方法に応じた袋小路の道路からの退出案内を行う袋小路退出案内手段を備えることを特徴とする。
【0024】
これにより、例えば、袋小路の道路に前進して進入した場合には後退して退出する案内を行い、一方、袋小路の道路に後退して進入した場合には前進して退出する案内を行うことができる。
【0025】
請求項12に記載のカーナビゲーション装置によれば、袋小路案内手段は、袋小路の道路と、経由地又は/及び目的地とを示す地図を表示画面に表示する表示制御手段を備えることを特徴とする。これにより、ユーザは、袋小路の道路と経由地や目的地の位置関係を視覚的に認識することができる。
【発明を実施するための最良の形態】
【0026】
以下、本発明のカーナビゲーション装置に関して、図面に基づいて説明する。
【0027】
(第1の実施形態)
図1は、本実施形態に係わるカーナビゲーション装置の概略構成を示すブロック図である。同図に示すように、本実施形態のカーナビゲーション装置100は、位置検出器1、地図データ入力器6、操作スイッチ群7、外部メモリ9、表示装置10、送受信機11、音声コントローラ12、スピーカ13、音声認識装置14、マイク15、リモコンセンサ16、リモートコントロール端末(以下リモコン)17、及びこれらと接続する制御回路8によって構成される。
【0028】
制御装置8は、通常のコンピュータとして構成されており、内部には周辺のCPU、ROM、RAM、I/O及びこれらの構成を接続するバスライン(何れも図示せず)が備えられている。この制御装置8は、位置検出器1、地図データ入力部6、操作スイッチ群7、外部メモリ9、表示装置10、送受信機11、音声コントローラ12、スピーカ13、音声認識装置14、リモコンセンサ16から入力された各種情報に基づき、所定の処理(例えば、地図縮尺変更処理、メニュー表示選択処理、目的地設定処理、経路探索実行処理、経路案内開始処理、現在位置修正処理、表示画面変更処理、音量調整処理等)を実行する。
【0029】
位置検出器1は、何れも周知の地磁気センサ2、ジャイロセンサ3、距離センサ4、及び衛星からの電波に基づいて車両の現在位置を検出するGPS(Global Positioning System)のためのGPS受信機5を有している。これら各センサは、各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用するように構成されている。なお、各センサの精度によっては位置検出器1を上述した内の一部で構成してもよく、更に、図示しないステアリングの回転センサ、各転動輪の車速センサ等を用いてもよい。
【0030】
地図データ入力器6は、道路ネットワークデータ、索引データ、描画データ等によって構成される地図データを入力するための装置であり、制御回路8からの要請により各種データを送信する。これら各種データを記憶する記憶媒体としては、そのデータ量からCD−ROMまたはDVD−ROMが一般的であるが、メモリカード、ハードディスク等の書き込み可能な記憶媒体を採用してもよい。ここで、道路ネットワークデータを構成するリンク情報とノード情報、索引データ、及び描画データについて説明する。
【0031】
先ず、リンクとは、地図上の各道路を交差・分岐・合流する点等の複数のノードにて分割し、それぞれのノード間をリンクとして規定されるものであり、このリンクを接続することにより道路を構成する。リンク情報は、リンクを特定する固有番号(リンクID)、リンクの長さを示すリンク長、リンクの始端及び終端ノード座標(緯度・経度)、道路名称、道路種別(高速道路、有料道路、国道、都道府県道等)、道路幅員、リンク旅行時間(徒歩や自動車で移動した場合の移動時間)等の各データから構成される。
【0032】
一方、ノード情報は、地図上の各道路が交差・分岐・合流するノード毎に固有の番号を付したノードID、ノード座標(緯度・経度)、ノードに接続する全てのリンクのリンクIDが記述される接続リンク、ノードに接続するリンクが袋小路の道路である場合に設定される袋小路フラグを示すノード属性等の各種情報から構成される。このように、ノードに接続するリンクが1つのみである場合には、そのノードに接続するリンクが袋小路の道路であるとして袋小路フラグを設定しておく。
【0033】
索引データは、施設等の検索に用いられるデータであり、施設、道路、道路の分岐・合流・交差する地点等の名称、施設種別、住所、電話番号、位置(緯度・経度)等の情報で構成されている。描画データは、地図表示に用いられるデータであり、海(湖、池等も含む)や山等の地形、施設、道路、道路の分岐地点、道路の合流地点、道路の交差点等の表示文字、表示位置(緯度・経度)、ポリゴン、目印(ランドマーク等)の情報で構成されている。
【0034】
操作スイッチ群7は、例えば、表示装置10と一体になったタッチスイッチもしくはメカニカルなスイッチ等が用いられ、スイッチ操作により制御装置8へ各種機能(例えば、地図縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整等)の操作指示を行う。
【0035】
また、リモコン17には、複数の操作スイッチが設けられ、スイッチ操作によりリモコンセンサ16を介して各種指令信号を制御装置8に入力し、制御装置8は、この各種指令信号に従って各種機能を実行する。なお、操作スイッチ群7とリモコン17は、何れのスイッチ操作によっても制御装置8に同じ機能を実行させることが可能である。
【0036】
制御装置8は、リモコン17を介してリモコンセンサ16から、あるいは操作スイッチ群7により目的地が設定されると、位置検出器1により検出された現在位置(出発地)と目的地とを結ぶ最適な経路を自動的に探索して案内経路を設定し表示する。このような案内経路を設定する手法は、ダイクストラ法等の手法が知られている。なお、出発地と目的地とを結ぶ経路内に経由地を設定することもできる。
【0037】
この設定された案内経路は、地図データ入力器6の地図データに基づき、表示装置10に表示される地図上に、位置検出器1により検出された現在位置マークと共に重畳表示される。表示装置10に表示される地図には、現在位置、経路の他、現在時刻、渋滞情報など他の情報表示も付加表示することができる。
【0038】
外部メモリ9は、HDD(Hard Disk Drive)等の書き込み可能な大容量記憶装置である。この外部メモリ9には、大量のデータが記憶される他、カーナビゲーション装置100への電源がOFFされても保持すべきデータを記憶したり、頻繁に使用するデータを地図データ入力器6からコピーして利用したりする。なお、外部メモリ9は、比較的記憶容量の小さいリムーバルなメモリであってもよい。
【0039】
表示装置10は、地図画面や目的地選択画面等を表示するものであって、フルカラー表示が可能なものであり、液晶、有機EL等を用いて構成することができる。
【0040】
送受信機置11は、外部(例えば、VICSシステムなどのインフラ)から提供される交通情報、気象情報、施設情報、広告情報等を受信したり、車両情報やユーザ情報等を外部へ発信したりする装置である。この送受信装置11によって外部から受け取った情報は、制御装置8で処理される。また、制御装置8で処理した情報を送受信機11から出力することもできるように構成されている。
【0041】
スピーカ13は、音声コントローラ12から入力された音声出力信号に基づいて、所定の音声(案内のための音声や画面操作の説明、音声認識結果等)を外部に報知する。マイク15は、ユーザが発声した音声を電気信号として音声認識装置14に入力する。
【0042】
音声認識装置14は、マイク15を介し発声されたユーザの入力音声と、内部に記憶する認識辞書(図示せず)中の語彙データ(比較対象パターン)とを照合し、最も一致度の高いものを認識結果として音声コントローラ12に入力する。
【0043】
音声コントローラ12は、音声認識装置14を制御すると共に、音声入力のあったユーザに対し、スピーカ13を通じてトークバック出力制御(音声出力)する。また、音声認識装置14の認識結果を制御装置8に入力する処理も行う。
【0044】
制御装置8は、音声認識装置14からの情報に基づいて、ユーザの発声に対する所定の処理(例えば、地図縮尺変更処理、メニュー表示選択処理、目的地設定処理、経路探索実行処理、経路案内開始処理、現在位置修正処理、表示画面変更処理、音量調整処理等)を実行する。また、制御装置8で処理された経路案内音声情報等は、音声コントローラ12を介してスピーカ13から適宜報知される。
【0045】
このような構成を備えるカーナビゲーション装置100は、上記経路探索実行処理によって探索された出発地と目的地とを結ぶ経路について、その経路に含まれる経由地、及び目的地の少なくとも一方の地点に到達する最終的な道路が袋小路であるか否かを判定する袋小路判定処理を実行する。そして、経由地や目的地に到達する最終的な道路が袋小路である場合、経路案内開始処理が実行されると、その袋小路に関する案内を行う袋小路案内処理を実行する。
【0046】
この袋小路案内処理は、経由地や目的地に到達する袋小路の道路へ進入するまでの距離が所定距離以下となった時点で袋小路の道路であることを事前に報知する袋小路事前報知機能と、その袋小路の道路へ車両が進入する際、予め指定された車両の進入方法に応じた進入案内を行う袋小路進入案内機能とを実行する。
【0047】
上記袋小路事前報知機能を実行することにより、ユーザは、経由地や目的地に到達する袋小路の道路へ進入する前に、その進入しようとする道路が袋小路であることを把握することができる。
【0048】
なお、車両の進入方法は、例えば、図2に示すようなユーザ設定画面において、経路探索実行処理が開始される前に予め指定する。同図に示すように、「袋小路案内」として、袋小路の道路へ進入する際の車両の進入方法(”前進”か”バック”)を指定させる。袋小路進入案内機能では、このユーザ設定画面にて指定された進入方法に応じた進入案内を行う。これにより、ユーザは、この袋小路進入案内機能により案内される進入案内に従って袋小路の道路に進入することで、ユーザ自身の好む方法で袋小路の道路へ進入することができる。
【0049】
次に、カーナビゲーション装置100の袋小路判定処理について、図3に示すフローチャートを用いて説明する。この袋小路判定処理では、ノード情報とリンク情報とを含む地図データを用いて、経由地や目的地に到達する最終的な道路が袋小路であるか否かを判定する。なお、以下の説明では、目的地に対する処理を例に説明するが、経由地についても同様の処理を行えばよいため、経由地に対する処理の説明を省略する。
【0050】
先ず、図3のステップ(以下、Sと記す)10では、上記経路探索実行処理によって探索された経路における目的地(或いは、目的地の最近傍)のノード(上記探索された経路の最端部のノード)の属性情報を読み込む。S20では、S10において読み込んだ属性情報を参照して、そのノードに接続するリンクが1つのみであるか否か、すなわち、上記ノードに袋小路フラグが設定されているか否かを判定する。ここで、肯定判定された場合にはS40へ処理を進め、経路案内開始処理の開始後、袋小路案内処理を実行する。一方、否定判定された場合には、経路案内開始処理の開始後、通常の経路案内を実行する。
【0051】
このように、ノードの属性情報として袋小路フラグを設定しておくことで、袋小路フラグの設定有無に基づいて、袋小路の道路であるか否かを判定することができる。なお、この袋小路の道路についての判定は、ノード情報の接続リンクに基づいて判定するようにしてもよい。すなわち、ノードの接続リンクに対して、進入リンクに対する退出リンクが存在しない場合に、目的地へ到達する最終的な道路は袋小路であると判定するようにしてもよい。これにより、退出リンクの有無に基づいて、袋小路の道路であるか否かを判定することができる。
【0052】
この袋小路判定処理の後に実行される袋小路案内処理では、先ず、経由地や目的地に到達する袋小路の道路へ進入するまでの距離が所定距離以下となった時点で、袋小路の道路であることを事前に報知する袋小路事前報知機能を実行する。
【0053】
この袋小路事前報知機能では、例えば、袋小路の道路へ進入するまでの距離が所定距離以下となったとき、経由地や目的地を示すマークと、この地点に到達する袋小路の道路とを示す地図を表示装置10の表示画面に表示するとともに、経由地や目的地へ到達するために最終的に走行する道路が袋小路であることを音声で報知する。これにより、ユーザは、経由地や目的地へ到達するために最終的に走行する道路が袋小路であることを把握することができるとともに、袋小路の道路と経由地や目的地の位置関係を視覚的に認識することができる。
【0054】
次に、袋小路事前報知機能が実行されると、袋小路の道路への進入案内を行う袋小路進入案内機能を実行する。この袋小路進入案内機能では、上記袋小路事前報知機能と同様に、経由地や目的地を示すマークと、この地点に到達する袋小路の道路とを示す地図を表示画面に表示するとともに、画面表示と音声とを用いて、袋小路の道路への進入方法を案内する。
【0055】
なお、袋小路進入案内機能では、予め指定された車両の進入方法、及び、進入しようとする袋小路の道路と接続する接続道路のセンターラインの有無に応じた進入案内を行う。以下、目的地へ到達する最終的な道路が袋小路であり、その袋小路の道路に接続する接続道路が交差道路である場合の進入案内について説明する。
【0056】
図4(a)〜(c)は、袋小路の道路への車両の進入方法として”前進”が指定(設定)された場合の進入案内の例である。同図(a)は、Aの方向から目的地へ到達するように経路が設定された場合の進入案内の例であり、同図(b)は、Cの方向から目的地へ到達するように経路が設定された場合の進入案内の例である。また、同図(c)は、Bの方向から目的地へ到達するように経路が設定された場合の進入案内の例である。
【0057】
このように、袋小路の道路への車両の進入方法として”前進”が指定(設定)された場合には、袋小路の道路と接続する接続道路(図4では交差道路)のセンターラインの有無に係らず、交通規則に従った進入案内を行えばよい。
【0058】
一方、袋小路の道路への車両の進入方法として”バック(後退)”が指定(設定)された場合には、次のような進入案内を行う。図5(a)、図6(a)は、Aの方向から目的地へ到達するように経路が設定された場合の進入案内の例であるが、この場合には、交差道路のセンターラインの有無に係らず、交通規則に従った進入案内を行えばよい。
【0059】
なお、図5(a)、図6(a)のように、後退して袋小路の道路へ進入する場合には、例えば、「目的地は袋小路になっています。バックで進入する際は回りの状況をよく確認してください。」などのメッセージを音声で案内するとよい。
【0060】
図5(b)、図6(b)は、Cの方向から目的地へ到達するように経路が設定された場合の進入案内の例である。図5(b)に示すセンターラインの無い交差道路においては、一旦、袋小路の道路を通過した後、後退して袋小路の道路に進入する案内を行えばよい。また、図6(b)に示すセンターラインの有る交差道路においては、一旦、袋小路の道路を通過して、ある地点で折り返した後、再度、袋小路の道路に接近する必要がある。
【0061】
すなわち、センターラインが敷設されている交差道路において、目的地を右手にみながら接近する場合、自車両は、基本的にセンターラインの左側の車線を走行する必要があるため、車両が袋小路の道路へ後退して進入する際には、一旦、目的地に到達する最終的な袋小路の道路を通過して、ある地点で折り返した後、再度、上記袋小路の道路に接近する必要がある。そのため、図6(b)に示すように、ある地点で折り返す案内を行う。
【0062】
なお、図5(b)、図6(b)のように、一旦、目的地に到達する最終的な袋小路の道路を通過した後、後退して袋小路の道路へ進入する場合には、例えば、「目的地は袋小路になっています。バックで進入しますので、一旦交差点を通過します。」などのメッセージを音声で案内するとよい。
【0063】
また、図5(c)、図6(c)は、Bの方向から目的地へ到達するように経路が設定された場合の進入案内の例である。図5(c)に示すセンターラインの無い交差道路においては、Aの方向へ左折した後、後退して袋小路の道路に進入する案内を行えばよい。これに対し、図6(c)に示すセンターラインの有る交差道路においては、Aの方向へ左折した後、ある地点で折り返し、再度、袋小路の道路に接近して進入する案内を行う。この図6(c)の進入案内については、Cの方向へ右折した後、後退して袋小路の道路へ進入する方法も可能であるが、この進入方法の場合、車両の後方から接近する接近車両が存在する場合、その接近車両によって追突されるリスクがある。従って、本実施形態では、Aの方向へ左折する案内としている。
【0064】
このように、袋小路の道路と接続する接続道路(図5、図6では交差道路)にセンターラインが敷設されているか否かによって、接続道路の走行方法が異なる。従って、接続道路のセンターラインの有無に応じた進入案内を行うことで、接続道路のセンターラインの有無に応じた適切な進入案内が可能となる。
【0065】
このように、本実施形態のナビゲーション装置100は、探索した経路に含まれる経由や目的地に到達する最終的な道路が袋小路であるか否かを判定し、袋小路の道路であると判定した場合、経由地や目的地に到達する道路が袋小路であることを事前に報知する袋小路事前報知機能や、その袋小路の道路へ車両が進入する際、予め指定された車両の進入方法に応じた進入案内を行う袋小路進入案内機能を実行する袋小路案内処理を行う。
【0066】
これにより、経由地や目的地の位置する道路が袋小路である場合、その袋小路の道路に関する案内が行われるため、ユーザは、この案内により袋小路の道路であることを把握することができる。
【0067】
(変形例1)
本実施形態のカーナビゲーション装置100による袋小路案内処理は、車両が袋小路の道路に位置する経由地や目的地に到達するまでの案内を行うものであるが、この経由地や目的地の位置する袋小路の道路から退出(出発)する際に、退出案内を行うようにしてもよい。
【0068】
例えば、袋小路の道路へ後退して進入した場合には、前進して退出する通常の案内を行えばよい。これに対し、袋小路の道路へ前進して進入した場合には、図7に示すように、退出後に進む方向に応じた退出案内を行う。図7(a)は、退出後にA又はCの方向へ進む場合の退出案内の例を示し、また、図7(b)は、退出後にBの方向へ進む場合の退出案内の例を示している。この退出案内においては、図8に示すように、交差点拡大地図に、一旦、後退して接続道路へ退出するイメージを重ねて表示して案内する。
【0069】
このように、経由地や目的地に到達した後にその地点から退出する際、袋小路の道路へ進入したときの進入方法に応じた袋小路の道路からの退出案内を行うことで、袋小路の道路に前進して進入した場合には後退して退出する案内を行い、一方、袋小路の道路に後退して進入した場合には前進して退出する案内を行うことができる。
【0070】
なお、袋小路の道路に接続される接続道路を走行する接近車両の存在を検知して、その検知した接近車両の情報を表示や音声を用いて報知するようにしてもよい。この接近車両の検知については、例えば、送受信機11を介して外部から接近車両の情報を取得したり、自車両の後部にレーダを備え、このレーダによって接近車両を検知したりすればよい。
【0071】
(変形例2)
本実施形態のカーナビゲーション装置100による袋小路案内処理は、袋小路の道路へ車両が進入する際、予め指定された車両の進入方法に応じた進入案内を行うものであるが、例えば、袋小路の道路へ後退して進入する際、車両の後方から他車両が接近する場合には、この接近車両によって追突されるリスクがある。
【0072】
従って、袋小路の道路へ後退して進入する際、車両が袋小路の道路への進入地点を通過する前の段階で、車両の後方から接近する接近車両が存在する場合には、予め指定された車両の進入方法に関わらず、前進による進入案内を強制的に行うようにしてもよい。これにより、後方から接近する接近車両によって追突されるリスクを低くすることができる。
【0073】
(変形例3)
例えば、道幅の狭い袋小路の道路へ前進して進入する場合、車両を切り返して進入しなければならないことがあるが、車両の切り返しは、ステアリング操作の負担が増えるため、ユーザにとって好ましくない。
【0074】
そこで、本変形例のカーナビゲーション装置100による袋小路案内処理では、車両の進入方法として”前進”が指定されている場合には、上記経由地や目的地に到達する袋小路の道路に前進して進入する際に、車両のステアリングの切り返し操作が必要となるか否かを判定する。
【0075】
この判定においては、先ず、地図データのリンク情報に含まれる道路幅員から、袋小路の道路の幅員と、袋小路の道路に接続される接続道路の幅員とを参照して、自車両が転回して袋小路の道路へ進入する際に用いることのできる転回スペースの広さを算出する。一方、車両の最小回転半径に基づいて、車両が転回する際に必要となる必要スペースの広さを算出する。
【0076】
そして、上記転回スペースが上記必要スペースを包含するか否かを判定する。この判定の結果、包含すると判定される場合には、車両を切り返すことなく、ステアリングを末切りした状態を保持して袋小路の道路へ前進して進入すること、すなわち、転回して進入することが可能であることがわかる。一方、包含しないと判定される場合には、車両を切り返す必要があるため、車両の進入方法として”前進”が指定されている場合であっても、後退による進入案内を行うようにする。
【0077】
これにより、袋小路の道路に前進して進入しようとする場合、車両を切り返して進入する必要があるか否かを判定することができる。なお、車両の最小回転半径は、外部メモリ9に予め記憶しておけばよい。
【図面の簡単な説明】
【0078】
【図1】カーナビゲーション装置100の全体構成を示すブロック図である。
【図2】ユーザ設定画面の表示例を示す図である。
【図3】袋小路判定処理の流れを示すフローチャートである。
【図4】(a)〜(c)は、交差道路から前進して進入する場合の進入案内の例を示す図である。
【図5】(a)〜(c)は、センターラインの無い交差道路からバックで進入する場合の進入案内の例を示す図である。
【図6】(a)〜(c)は、センターラインの有る交差道路からバックで進入する場合の進入案内の例を示す図である。
【図7】(a)は、退出後にA又はCの方向へ進む場合の退出案内の例を示した図であり、(b)は、退出後にBの方向へ進む場合の退出案内の例を示した図である。
【図8】交差点拡大地図を示す図である。
【符号の説明】
【0079】
1 位置検出器
6 地図データ入力器
7 操作スイッチ群
8 制御回路
9 外部メモリ
10 表示装置
11 送受信機
12 音声コントローラ
13 スピーカ
14 音声認識装置
15 マイク
16 リモコンセンサ
17 リモコン
100 カーナビゲーション装置
【特許請求の範囲】
【請求項1】
出発地と目的地とを結ぶ経路を探索して、その経路に従った前記目的地への案内を行うカーナビゲーション装置であって、
前記経路に含まれる経由地、及び前記経路の目的地の少なくとも一方の地点に到達する最終的な道路が袋小路であるか否かを判定する袋小路判定手段と、
前記袋小路判定手段が袋小路の道路であると判定した場合、当該袋小路の道路に関する案内を行う袋小路案内手段を備えることを特徴とするカーナビゲーション装置。
【請求項2】
前記袋小路案内手段は、前記経由地又は/及び前記目的地へ到達する最終的な道路が袋小路であることを前記袋小路の道路へ進入する前に報知する袋小路事前報知手段を備えることを特徴とする請求項1記載のカーナビゲーション装置。
【請求項3】
袋小路の道路へ進入する際の車両の進入方法を指定する進入方法指定手段を備え、
前記袋小路案内手段は、前記袋小路の道路へ進入する際、前記進入方法指定手段によって指定された車両の進入方法に応じた進入案内を行う袋小路進入案内手段を備えることを特徴とする請求項1又は2記載のカーナビゲーション装置。
【請求項4】
道路が交差・分岐・合流する地点を示すノードの属性情報を含むノード情報と、前記ノード間を接続するリンクのリンク情報とを含む地図データを記憶する地図データ記憶手段を備え、
前記袋小路判定手段は、前記地図データ記憶手段の記憶する地図データを用いて判定することを特徴とする請求項1〜3の何れか1項に記載のカーナビゲーション装置。
【請求項5】
前記地図データ記憶手段は、前記ノードの属性情報として、ノードに接続するリンクが袋小路の道路である場合に設定される袋小路フラグを含んで記憶するものであって、
前記袋小路判定手段は、前記経由地又は/及び前記目的地のノードの属性情報に対して前記袋小路フラグが設定されている場合に、前記経由地又は/及び前記目的地へ到達する最終的な道路は袋小路であると判定することを特徴とする請求項4記載のカーナビゲーション装置。
【請求項6】
前記地図データ記憶手段は、前記ノード情報として、ノードに接続されるリンクを示す接続リンク情報を含んで記憶するものであって、
前記袋小路判定手段は、前記経由地又は/及び前記目的地のノードの接続リンク情報に対して、進入リンクに対する退出リンクが存在しない場合に、前記経由地又は/及び前記目的地へ到達する最終的な道路は袋小路であると判定することを特徴とする請求項4記載のカーナビゲーション装置。
【請求項7】
前記車両が前記袋小路の道路へ前進して進入する際に、前記車両のステアリングの切り返し操作が必要となるか否かを判定する切り返し判定手段を備え、
前記袋小路進入案内手段は、前記切り返し判定手段によって切り返し操作が必要となると判定された場合、前記進入方法指定手段によって指定された車両の進入方法に関わらず、後退による進入案内を強制的に行うことを特徴とする請求項3〜6の何れか1項に記載のカーナビゲーション装置。
【請求項8】
前記地図データ記憶手段は、前記リンク情報として、道路幅員を含んで記憶するものであって、
前記切り返し判定手段は、前記袋小路の道路幅員及び前記車両の最小回転半径に基づいて判定することを特徴とする請求項7記載のカーナビゲーション装置。
【請求項9】
前記袋小路進入案内手段は、前記車両が前記袋小路の道路へ後退して進入する際、前記袋小路の道路と接続する接続道路のセンターラインの有無に応じた進入案内を行うことを特徴とする請求項3〜8の何れか1項に記載のカーナビゲーション装置。
【請求項10】
前記袋小路進入案内手段は、前記車両が前記袋小路の道路へ後退して進入する際、前記車両が前記袋小路の道路への進入地点を通過する前の段階で、前記車両の後方から接近する接近車両が存在する場合には、前記進入方法指定手段によって指定された車両の進入方法に関わらず、前進による進入案内を強制的に行うことを特徴とする請求項3〜9の何れか1項に記載のカーナビゲーション装置。
【請求項11】
前記袋小路案内手段は、前記車両が前記袋小路の道路を走行して前記経由地又は/及び前記目的地に到達した後にその地点から退出する際、前記袋小路の道路へ進入したときの進入方法に応じた前記袋小路の道路からの退出案内を行う袋小路退出案内手段を備えることを特徴とする請求項1〜10の何れか1項に記載のカーナビゲーション装置。
【請求項12】
前記袋小路案内手段は、前記袋小路の道路と、前記経由地又は/及び前記目的地とを示す地図を表示画面に表示する表示制御手段を備えることを特徴とする請求項1〜11の何れか1項に記載のカーナビゲーション装置。
【請求項1】
出発地と目的地とを結ぶ経路を探索して、その経路に従った前記目的地への案内を行うカーナビゲーション装置であって、
前記経路に含まれる経由地、及び前記経路の目的地の少なくとも一方の地点に到達する最終的な道路が袋小路であるか否かを判定する袋小路判定手段と、
前記袋小路判定手段が袋小路の道路であると判定した場合、当該袋小路の道路に関する案内を行う袋小路案内手段を備えることを特徴とするカーナビゲーション装置。
【請求項2】
前記袋小路案内手段は、前記経由地又は/及び前記目的地へ到達する最終的な道路が袋小路であることを前記袋小路の道路へ進入する前に報知する袋小路事前報知手段を備えることを特徴とする請求項1記載のカーナビゲーション装置。
【請求項3】
袋小路の道路へ進入する際の車両の進入方法を指定する進入方法指定手段を備え、
前記袋小路案内手段は、前記袋小路の道路へ進入する際、前記進入方法指定手段によって指定された車両の進入方法に応じた進入案内を行う袋小路進入案内手段を備えることを特徴とする請求項1又は2記載のカーナビゲーション装置。
【請求項4】
道路が交差・分岐・合流する地点を示すノードの属性情報を含むノード情報と、前記ノード間を接続するリンクのリンク情報とを含む地図データを記憶する地図データ記憶手段を備え、
前記袋小路判定手段は、前記地図データ記憶手段の記憶する地図データを用いて判定することを特徴とする請求項1〜3の何れか1項に記載のカーナビゲーション装置。
【請求項5】
前記地図データ記憶手段は、前記ノードの属性情報として、ノードに接続するリンクが袋小路の道路である場合に設定される袋小路フラグを含んで記憶するものであって、
前記袋小路判定手段は、前記経由地又は/及び前記目的地のノードの属性情報に対して前記袋小路フラグが設定されている場合に、前記経由地又は/及び前記目的地へ到達する最終的な道路は袋小路であると判定することを特徴とする請求項4記載のカーナビゲーション装置。
【請求項6】
前記地図データ記憶手段は、前記ノード情報として、ノードに接続されるリンクを示す接続リンク情報を含んで記憶するものであって、
前記袋小路判定手段は、前記経由地又は/及び前記目的地のノードの接続リンク情報に対して、進入リンクに対する退出リンクが存在しない場合に、前記経由地又は/及び前記目的地へ到達する最終的な道路は袋小路であると判定することを特徴とする請求項4記載のカーナビゲーション装置。
【請求項7】
前記車両が前記袋小路の道路へ前進して進入する際に、前記車両のステアリングの切り返し操作が必要となるか否かを判定する切り返し判定手段を備え、
前記袋小路進入案内手段は、前記切り返し判定手段によって切り返し操作が必要となると判定された場合、前記進入方法指定手段によって指定された車両の進入方法に関わらず、後退による進入案内を強制的に行うことを特徴とする請求項3〜6の何れか1項に記載のカーナビゲーション装置。
【請求項8】
前記地図データ記憶手段は、前記リンク情報として、道路幅員を含んで記憶するものであって、
前記切り返し判定手段は、前記袋小路の道路幅員及び前記車両の最小回転半径に基づいて判定することを特徴とする請求項7記載のカーナビゲーション装置。
【請求項9】
前記袋小路進入案内手段は、前記車両が前記袋小路の道路へ後退して進入する際、前記袋小路の道路と接続する接続道路のセンターラインの有無に応じた進入案内を行うことを特徴とする請求項3〜8の何れか1項に記載のカーナビゲーション装置。
【請求項10】
前記袋小路進入案内手段は、前記車両が前記袋小路の道路へ後退して進入する際、前記車両が前記袋小路の道路への進入地点を通過する前の段階で、前記車両の後方から接近する接近車両が存在する場合には、前記進入方法指定手段によって指定された車両の進入方法に関わらず、前進による進入案内を強制的に行うことを特徴とする請求項3〜9の何れか1項に記載のカーナビゲーション装置。
【請求項11】
前記袋小路案内手段は、前記車両が前記袋小路の道路を走行して前記経由地又は/及び前記目的地に到達した後にその地点から退出する際、前記袋小路の道路へ進入したときの進入方法に応じた前記袋小路の道路からの退出案内を行う袋小路退出案内手段を備えることを特徴とする請求項1〜10の何れか1項に記載のカーナビゲーション装置。
【請求項12】
前記袋小路案内手段は、前記袋小路の道路と、前記経由地又は/及び前記目的地とを示す地図を表示画面に表示する表示制御手段を備えることを特徴とする請求項1〜11の何れか1項に記載のカーナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2006−220562(P2006−220562A)
【公開日】平成18年8月24日(2006.8.24)
【国際特許分類】
【出願番号】特願2005−34825(P2005−34825)
【出願日】平成17年2月10日(2005.2.10)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成18年8月24日(2006.8.24)
【国際特許分類】
【出願日】平成17年2月10日(2005.2.10)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]