
カーナビゲーション装置
【課題】 動作が停止された後に移動されても起動時に正常なナビゲーションを開始できるカーナビゲーション装置を提供する。
【解決手段】 現在の位置を検出する位置検出手段1と、現在向いている方向を検出する方向検出手段2と、位置および方向の少なくとも1つを変更する地点を、変更地点として登録する変更地点登録手段3と、起動時に位置検出手段で検出された位置が変更地点登録手段によって登録された変更地点から所定範囲内にあるかどうかを判断する変更地点判断手段4と、変更地点判断手段によって所定範囲内にあると判断された場合に、位置検出手段で検出された位置を示す値および方向検出手段で検出された方向を示す値の少なくとも1つを、位置および方向の各々に対してあらかじめ定められた変更値に変更する位置・方向変更手段6とを備えている。
【解決手段】 現在の位置を検出する位置検出手段1と、現在向いている方向を検出する方向検出手段2と、位置および方向の少なくとも1つを変更する地点を、変更地点として登録する変更地点登録手段3と、起動時に位置検出手段で検出された位置が変更地点登録手段によって登録された変更地点から所定範囲内にあるかどうかを判断する変更地点判断手段4と、変更地点判断手段によって所定範囲内にあると判断された場合に、位置検出手段で検出された位置を示す値および方向検出手段で検出された方向を示す値の少なくとも1つを、位置および方向の各々に対してあらかじめ定められた変更値に変更する位置・方向変更手段6とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、地図上に自車位置および自車方向を表示して案内を行うカーナビゲーション装置に関し、特に動作停止状態で移動された後に起動された場合の自車位置および自車方向を確定する技術に関する。
【背景技術】
【0002】
カーナビゲーション装置は、自車の現在位置(以下、「自車位置」という)および自車が向いている方向(以下、「自車方向」という)を検出し、この検出した結果に基づきディスプレイの画面に自車位置、自車方向および周辺の地図を表示する。したがって、運転者は、地図上に表示された自車位置および自車方向を見ながら車両を走行させることができる。
【0003】
ところで、車両を転回させるためのターンテーブルを備えたタワーパーキング(立体駐車場)に入庫した場合、フェリーに乗船した場合、陸送用の運搬車両に搭載されて移動した場合等においては、カーナビゲーション装置の電源がオフされた状態で自車位置や自車方向が変化する。すなわち、タワーパーキングから出庫する場合、フェリーから下船する場合、運搬車両から降ろされる場合等にカーナビゲーション装置の電源がオンされた時は、自車位置および自車方向は実際とは異なった状態になっている。したがって、ナビゲーションは、実際とは異なった状態から開始されることになり、しばらくの間は、迷走してしまう、すなわち、本来とは異なる方向への進行を案内してしまうという問題があった。
【0004】
このような問題を解消するために、特許文献1は、ターンテーブルを備えた駐車場から出庫する際に自車方位を地図画面に正確に表示することができるナビゲーション装置を開示している。このナビゲーション装置は、現在地を検出する現在地検出手段と、自車方位を検出する自車方位検出手段と、検出された現在地に基づいて所定の範囲内にターンテーブルがあるかどうかを判断するターンテーブル有無判断処理手段と、ターンテーブルがある場合に、自車方位を修正する自車方位修正処理手段とを備えている。
【0005】
【特許文献1】特開2002−267460号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上述した従来のナビゲーション装置は、ターンテーブルを備えた駐車場から出庫する場合は自車方位を地図画面に正確に表示することができるものの、例えばフェリーに乗船した場合や陸送用の運搬車両に搭載されて移動する場合のように、ナビゲーション装置の電源がオフされている状態で位置が変更された場合には、迷走するという問題が残されている。
【0007】
また、従来のナビゲーション装置は、自車位置および自車方向を修正すべき地点から所定範囲内にあるか否かを判断して自車方位を修正するだけであるので、実際にはタワーパーキングへの入庫やフェリーへの乗船がなされていない可能性もあり、この場合は、自車位置および自車方位の修正は不要であるにも拘わらず修正が行われる。例えば、タワーパーキング近辺で短時間だけ停車してナビゲーション装置の電源をオフした後、タワーパーキングに入庫せずに電源をオンにして出発したとき、フェリー乗り場でフェリーに乗船するまでの待ち時間に短時間だけ停車してナビゲーション装置の電源をオフした後に電源をオンしてフェリーに乗船したとき、フェリー乗り場付近で短時間停車してナビゲーション装置の電源をオフしたがフェリーに乗船しないときなどに、自車位置および自車方位の不要な修正が行われる場合がある。
【0008】
この発明は、上述した問題点を解消するためになされたものであり、動作停止状態で移動されても起動時に正常なナビゲーションを開始できるカーナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
この発明に係るカーナビゲーション装置は、現在の位置を検出する位置検出手段と、現在向いている方向を検出する方向検出手段と、位置および方向の少なくとも1つを変更する地点を、変更地点として登録する変更地点登録手段と、起動時に位置検出手段で検出された位置が変更地点登録手段によって登録された変更地点から所定範囲内にあるかどうかを判断する変更地点判断手段と、変更地点判断手段によって所定範囲内にあると判断された場合に、位置検出手段で検出された位置を示す値および方向検出手段で検出された方向を示す値の少なくとも1つを、位置および方向の各々に対してあらかじめ定められた変更値に変更する位置・方向変更手段とを備えている。
【発明の効果】
【0010】
この発明によれば、位置および方向を変更すべき地点を変更地点として登録しておき、起動時に現在の位置が、登録された変更地点から所定範囲内にある場合に、所定の位置および方向に変更するように構成したので、動作停止状態でカーナビゲーション装置が移動されても起動時に正常なナビゲーションを開始できる。
【発明を実施するための最良の形態】
【0011】
以下、この発明の実施の形態を、図面を参照しながら詳細に説明する。
実施の形態1.
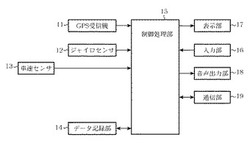
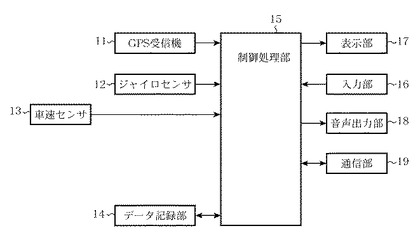
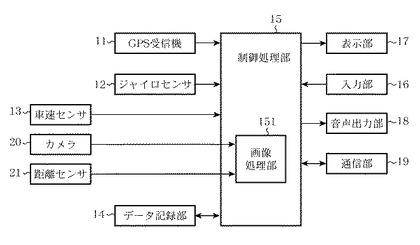
図1は、この発明の実施の形態1に係るカーナビゲーション装置の構成を示すブロック図である。このカーナビゲーション装置は、GPS(Global Positioning System)受信機11、ジャイロセンサ12、車速センサ13、データ記録部14、制御処理部15、入力部16、表示部17、音声出力部18および通信部19から構成されている。
【0012】
GPS受信機11は、GPS衛星からの電波を受信して車両の現在位置を検出する。このGPS受信機11において検出された車両の現在位置を表す現在位置データは制御処理部15に送られる。ジャイロセンサ12は、車両が向いている方向を検出する。このジャイロセンサ12で検出された車両が向いている方向を表す方向データは制御処理部15に送られる。車速センサ13は、車両の移動速度を検出する。この車速センサ13で検出された移動速度を表す速度データは制御処理部15に送られる。
【0013】
データ記録部14は、例えばハードディスク(HDD:Hard Disk Drive)やPCカードといった記録メディアから構成されており、地図データ、その他の種々のデータを記憶している。このデータ記録部14は、制御処理部15によってアクセスされる。
【0014】
制御処理部15は、例えばCPU、ROM、RAM等を含むマイクロコンピュータから構成されている。この制御処理部15は、カーナビゲーション装置の全体を制御する。例えば、GPS受信機11から送られてくる現在位置データ、ジャイロセンサから送られてくる方向データおよび車速センサ13から送られてくる速度データに基づいて自車位置および自車方向を検出し、データ記録部14から読み出した地図データに基づいて生成された地図上に、検出された自車位置および自車方向を表す図形(自車マーク)を重畳させて表示部17に表示させる。この制御処理部15の詳細は後述する。
【0015】
入力部16は、この発明の入力手段に対応し、リモートコントローラ、タッチパネル、操作パネルに設けられた各種のボタン等から構成されている。この入力部16、ユーザが当該カーナビゲーション装置に種々の指示を与えるために使用される。この入力部16が操作されることによって発生された入力データは、制御処理部15に送られる。
【0016】
表示部17は、例えば液晶ディスプレイ装置から構成されており、制御処理部15から送られてくる画像データに基づいて、地図上に自車マークが描かれた画像や種々のメッセージを表示する。音声出力部18は、ナビゲーションを行うためのメッセージを音声で出力する。通信部19は、制御処理部15と外部との間の通信を制御する。
【0017】
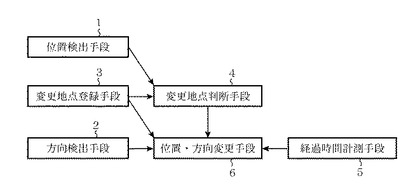
図2は、この発明の実施の形態1に係るカーナビゲーション装置の機能的な構成を示すブロック図である。このカーナビゲーション装置は、位置検出手段1、方向検出手段2、変更地点登録手段3、変更地点判断手段4、経過時間計測手段5および位置・方向変更手段6から構成されている。これらの構成要素は、主として、制御処理部15における処理によって構成されている。
【0018】
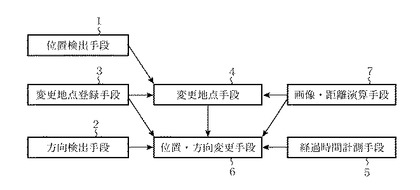
位置検出手段1は、GPS受信機11から送られてくる現在位置データ、ジャイロセンサから送られてくる方向データおよび車速センサ13から送られてくる速度データに基づき自車の現在位置を算出し、自車位置データとして変更地点判断手段4に送る。方向検出手段2は、GPS受信機11から送られてくる現在位置データ、ジャイロセンサから送られてくる方向データおよび車速センサ13から送られてくる速度データに基づき自車が向いている方向を算出し、自車方向データとして位置・方向変更手段6に送る。
【0019】
変更地点登録手段3は、自車位置および自車方向を変更すべき地点を、変更地点として登録して保存する。この変更地点登録手段3における変更地点の登録およびその変更は、利用者が表示部17に表示された画面を見ながら入力部16を操作して入力することにより行われる。この変更地点登録手段3によって登録されて保存されている変更地点は、変更地点データとして変更地点判断手段4および位置・方向変更手段6に送られる。
【0020】
また、この変更地点登録手段3は、上述した変更地点の登録の他に、変更地点判断手段4において使用される「所定範囲」の登録、位置・方向変更手段6において変更に使用される「変更値」の登録、および動作が停止されてからの経過時間の閾値として使用される「閾値時間」の登録にも使用される。
【0021】
なお、変更地点登録手段3における変更地点の登録およびその変更は、入力部16から変更地点データを入力する他に、図示しない音声認識装置を用いた音声操作によって変更地点データを入力することによって行うように構成できる。また、変更地点登録手段3における変更地点の登録およびその変更は、外部から通信部19を経由して受け取った変更地点データや、データ記録部14に格納されている地図データから取得した変更地点データ等を入力することによって行うように構成することもできる。この場合、音声認識装置、通信部19またはデータ記録部14が、この発明の入力手段に対応する。
【0022】
また、変更地点登録手段3は、位置検出手段1で検出された自車の現在位置がGPS受信機11による受信状況の変化に起因して突然に変化するといった位置飛びが発生した場合に、位置飛びの距離や発生頻度に応じて、自動的に、または変更地点を登録すべき旨の催促や変更地点を登録するか否かの問い合わせに応答して利用者が手動で指示した時に、位置飛びが発生する前の地点を変更地点として登録するように構成できる。
【0023】
変更地点判断手段4は、位置検出手段1で検出された自車位置と、変更地点登録手段3から取得された変更地点とを比較し、自車位置が変更地点から所定範囲以内、例えば半径30m以内であるかどうかを判断する。この変更地点判断手段4による判断結果は、位置・方向変更手段6に送られる。
【0024】
経過時間計測手段5は、動作が停止された時刻(例えば、電源オフされた時刻やスタンバイモードに入った時刻9を記録しておき、次に起動された時刻(例えば、電源オンされた時刻やスタンバイモードから復帰した時刻)と比較することにより、動作が停止されている間に経過した時間(以下、「経過時間」という)を計測する。この経過時間計測手段5によって計測された経過時間は、位置・方向変更手段6に送られる。
【0025】
位置・方向変更手段6は、変更地点判断手段4から送られてきた判断結果が所定範囲以内であることを示しており、かつ経過時間計測手段5から送られてきた経過時間が閾値時間、例えば1時間以上であれば、その時点の自車位置を示す値および自車方向を示す値を、あらかじめ定められた変更値にそれぞれ変更する。なお、この変更に用いる位置および方向を示す値としては、変更地点登録手段3によって登録された値の他に、地図データに登録された値、利用者が表示部17を見ながら入力部16から入力した値、または通信部19から取得した値等を用いることもできる。
【0026】
また、経過時間の閾値として使用される閾値時間は、予め準備された固定値、利用者が表示部17を見ながら入力部16から入力した値、または、タワーパーキングやフェリー等といった種別によって自動的に付与された値等を用いることができ、この閾値時間を変更することにより、不要な位置および方向の変更が起こるのを防ぐことが可能になる。
【0027】
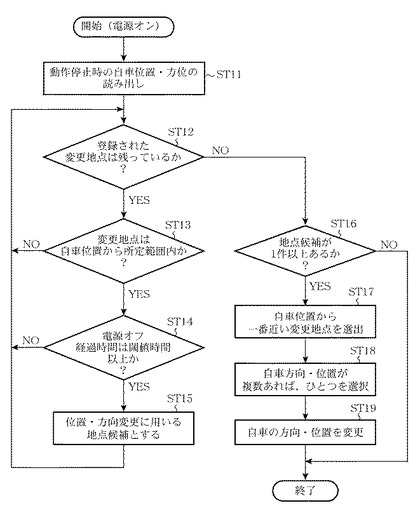
次に、上記のように構成される、この発明の実施の形態1に係るカーナビゲーション装置の動作を、自車位置および自車方向を決定する処理を中心に、図3に示すフローチャートを参照しながら説明する。
【0028】
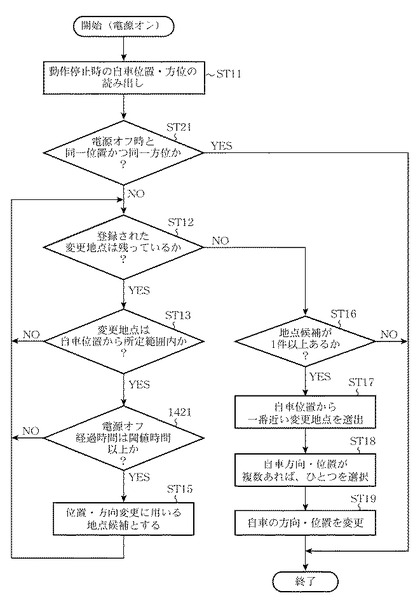
カーナビゲーション装置が起動されると、まず、動作停止時に図示しないメモリに記録された自車位置および自車方向が読み出される(ステップST11)。そして、変更地点登録手段3によって登録された変更地点が残っているかどうかが調べられる(ステップST12)。このステップST12において、登録された変更地点が残っていることが判断されると、次いで、残っている変更地点の1つが取り出され、その取り出された変更地点は自車位置から所定範囲内であるかどうかが調べられる(ステップST13)。このステップST13において、変更地点が自車位置から所定範囲内でないことが判断されると、シーケンスはステップST12に戻る。
【0029】
一方、ステップST13において、変更地点が自車位置から所定範囲内であることが判断されると、次いで、経過時間計測手段5によって計測された経過時間が閾値時間以上であるかどうかが調べられる(ステップST14)。このステップST14において、経過時間が閾値時間以上でないことが判断されると、シーケンスはステップST12に戻る。一方、ステップST14において、経過時間が閾値時間以上であることが判断されると、その変更地点が、自車位置および自車方向の変更に用いる地点候補とされる(ステップST15)。その後、シーケンスは、ステップST12に戻り、以下、同様の処理が繰り返される。
【0030】
上記ステップST12〜ST15の繰り返し実行において、ステップST12において、登録された変更地点が残っていないことが判断されると、次いで、地点候補が1件以上あるかどうかが調べられる(ステップST16)。このステップST16において、地点候補が1件以上ない、つまり地点候補がないことが判断されると、自車位置および自車方向を決定する処理は終了する。
【0031】
一方、上記ステップST16において、地点候補が1件以上あることが判断されると、自車位置から一番近い変更地点が選出される(ステップST17)。次いで、ステップST17において選択された変更地点に、複数組の位置および方向が設定されていれば、その中から1つが利用者によって選択される(ステップST18)。なお、この選択は、経過時間等に応じて自動的に行うように構成することもできる。
【0032】
次いで、その時点の自車位置を示す値および自車方向を示す値が、位置および方向の各々に対してあらかじめ定められた変更値に変更される(ステップST19)。この場合、自車位置および自車方向を自動的に変更する前に、利用者にテロップ表示や音声等によって変更する旨を通知したり、変更の要否の確認するように構成することもできる。以上により、自車位置および自車方向を決定する処理は終了する。
【0033】
以上説明したように、この発明の実施の形態1に係るカーナビゲーション装置によれば、位置および方向を変更すべき地点を変更地点として登録しておき、起動時に現在の位置が登録された変更地点から所定範囲内にある場合に、その時点の位置を示す値および方向示す値を、あらかじめ定められた変更値にそれぞれ変更するように構成したので、例えば、ターンテーブル付のタワーパーキングに入庫したりフェリーに乗船してカーナビゲーション装置の動作が停止された後に、カーナビゲーション装置が移動され、その後、ターンテーブル付のタワーパーキングから出庫したりフェリーから下船するためにカーナビゲーション装置が起動された場合は、その起動直後であっても自車位置および自車方向が正しい値に変更されるので正常なナビゲーションを開始できる。
【0034】
また、自車位置が変更地点から所定範囲内にあり、かつ経過時間が閾値時間以上になった場合に、その時点の位置を示す値および方向示す値が、あらかじめ定められた変更値にそれぞれ変更されるので、閾値時間以内の一時的な動作停止やクランキングの場合などは、自車位置および自車方向の変更が行われない。したがって、不要な自車位置および自車方向の変更が起こるのを削減することができる。
【0035】
また、利用者は、変更地点登録手段3による変更地点、変更地点判断手段4において使用される所定範囲、位置・方向変更手段6において変更に使用される所定の位置および方向、および位置・方向変更手段において使用される閾値時間の登録およびその変更をできるように構成したので、利用者は、自分の行動パターンに適合するように、必要な変更のみを行うことができる。また、利用者は、登録地点の種別、例えばタワーパーキングやフェリー乗り場等によって最適な値を登録できる。
【0036】
また、変更に使用される所定の位置および方向を複数組登録しておき、自車位置が登録地点から所定範囲内にある場合に、動作停止時の位置および方向を、複数組から選択された1組の所定の位置および方向にそれぞれ変更するように構成したので、同じ場所(例えばフェリー乗り場)から、複数の場所(例えばフェリー到着地)に移動する場合にも対応可能である。
【0037】
なお、上述した実施の形態1に係るカーナビゲーション装置においては、位置と方向の両方を変更するように構成したが、位置および方向のどちらか一方のみ変更するように構成することもできる。
【0038】
実施の形態2.
図4は、この発明の実施の形態2に係るカーナビゲーション装置の構成を示すブロック図である。このカーナビゲーション装置は、実施の形態1に係るカーナビゲーション装置に、カメラ20、距離センサ21が追加されるとともに、制御処理部15の内部に画像処理部151が追加されて構成されている。以下では、実施の形態1と異なる部分についてのみ説明する。
【0039】
カメラ20は、車両に設置されており、車両周辺を撮影して監視するために使用される。カメラ20の数は、1台に限らず任意である。また、このカメラ20は、車両の後方を撮影するバックカメラと兼用することもできる。このカメラ20で撮影することによって得られた画像信号は、制御処理部15の内部の画像処理部151に送られる。
【0040】
距離センサ21は、例えば超音波、レーザ、赤外線等を用いて車両から周辺障害物までの距離を測定する。距離センサ21の数は、1台に限らず任意である。この距離センサ21は、車両をバックさせる時に警告を発するためのセンサ等と兼用することもできる。この距離センサ21によって得られた距離信号は、制御処理部15の内部の画像処理部151に送られる。
【0041】
画像処理部151は、カメラ20から送られてくる画像信号および距離センサ21から送られてくる距離信号を処理することにより、カーナビゲーション装置の動作が停止された時の位置および方向と起動時の位置および方向が同一であるかどうかを判断する。
【0042】
図5は、この発明の実施の形態2に係るカーナビゲーション装置の機能的な構成を示すブロック図である。このカーナビゲーション装置は、実施の形態1のそれに、画像・距離演算手段7が追加されて構成されている。以下、実施の形態1と相違する部分についてのみ説明する。
【0043】
画像・距離演算手段7は、この発明の状態変化検出手段に対応する。この画像・距離演算手段7は、カメラ20、距離センサ21および制御処理部15の内部の画像処理部151から構成されており、カメラ20からの画像信号および/または距離センサ21からの距離信号に対して信号処理を行うことにより、動作停止時に保存しておいた画像信号および/または距離信号や、あらかじめ登録された画像信号および/または距離信号と、起動時に取得した画像信号および/または距離信号とを比較し、車両の状態(外部の状態)の変化の有無、つまり同一の位置および方向であるかどうかを演算により判断する。この画像・距離演算手段7における判断結果は、変更地点判断手段4および位置・方向変更手段6に送られる。
【0044】
方向に関しては、例えば、タワーパーキングに入庫した際は、車両後方を向いた距離センサ21で測定される距離は3m以上であるが、動作停止状態でタワーパーキング内において転回されて出庫する際に起動すると、距離センサ21で測定される距離は、1m程度に変化するので、方向が変更されたことを検出できる。タワーパーキング周辺で一時停車しただけの場合や、タワーパーキングの内部で転回されない場合は、これらの値は変化しないことが多い。なお、内部で転回されるタワーパーキングでの出庫時の距離をあらかじめ登録しておけば、車両後方からタワーパーキングの内壁までの距離はほぼ一定であるので、より確実に転回されたことを検出することができる。
【0045】
カメラ20として車両の後方を撮影するバックカメラを用いる場合は、上記と同様の状況においては、入庫時は、タワーパーキングの外部の映像が得られるが、内部で転回されるタワーパーキングでは、出庫時にタワーパーキングの内壁や鏡に映った自車の映像に変化するので、方向が変更されたことを検出できる。タワーパーキング周辺で一時停車しただけの場合や、タワーパーキングの内部で転回されない場合は、これら映像は変化しないことが多い。なお、内部で転回されるタワーパーキングでの出庫時の映像をあらかじめ登録しておけば、車両後方側の映像はほぼ一定であるので、より確実に転回されたことを検出することが可能である。
【0046】
なお、入庫時にカメラ20から得られた映像と出庫時にカメラ20から得られた映像とは完全に一致する必要はなく、映像の一部が同一であれば、動作停止時と起動時とで、同一位置かつ同一方向であると判断することができる。
【0047】
次に、上記のように構成される、この発明の実施の形態2に係るカーナビゲーション装置の動作を、自車位置および自車方向を決定する処理を中心に、図6に示すフローチャートを参照しながら説明する。以下においては、実施の形態1と同一のステップには、図3に示すフローチャートに付した符号と同一の符号を付し、説明を簡略化する。
【0048】
カーナビゲーション装置が起動されると、まず、動作停止時に記録された自車位置および自車方向が読み出される(ステップST11)。次いで、動作停止時と同一位置かつ同一方向であるかどうかが調べられる(ステップST21)。すなわち、画像・距離演算手段7における信号処理の結果が、同一位置かつ同一方向を示しているかどうかが調べられる。このステップST21において、同一位置かつ同一方向であることが判断されると、自車位置および自車方向の変更は不要であると判断され、自車位置および自車方向を決定する処理は終了する。一方、ステップST21において同一位置かつ同一方向でないことが判断されると、シーケンスはステップST12に進む。ステップST12以下の処理は実施の形態1のそれと同じである。
【0049】
以上説明したように、この発明の実施の形態2に係るカーナビゲーション装置によれば、動作停止時と起動時の周辺の状況(カメラ20により得られる映像または距離センサ21により得られる距離)を比較することにより同一位置かつ同一方向であるかどうかを判断し、同一位置かつ同一方向である場合は、自車位置および自車方向の変更を行わないので、不要な変更を低減させることができる。
【0050】
なお、上述した実施の形態2に係るカーナビゲーション装置では、車両に設置された装置で車両周辺を監視することにより車両状態の変化を検出しているが、車両に設置された傾斜センサ等で車両の傾き等の状態を検出するよう構成することもできる。また、周辺カメラ等、車外に設置された装置で車両状態が変化したことを検出するように構成することもできる。
【図面の簡単な説明】
【0051】
【図1】この発明の実施の形態1に係るカーナビゲーション装置の構成を示すブロック図である。
【図2】この発明の実施の形態1に係るカーナビゲーション装置の機能的な構成を示すブロック図である。
【図3】この発明の実施の形態1に係るカーナビゲーション装置の動作を説明するためのフローチャートである。
【図4】この発明の実施の形態2に係るカーナビゲーション装置の構成を示すブロック図である。
【図5】この発明の実施の形態2に係るカーナビゲーション装置の機能的な構成を示すブロック図である。
【図6】この発明の実施の形態2に係るカーナビゲーション装置の動作を説明するためのフローチャートである。
【符号の説明】
【0052】
1 位置検出手段、2 方向検出手段、3 変更地点登録手段、4 変更地点判断手段、5 経過時間計測手段、6 位置・方向変更手段、7 画像・距離演算手段、11 GPS受信機、12 ジャイロセンサ、13 車速センサ、14 データ記録部、15 制御処理部、16 入力部、17 表示部、18 音声出力部、19 通信部、20 カメラ、21 距離センサ、151 画像処理部。
【技術分野】
【0001】
この発明は、地図上に自車位置および自車方向を表示して案内を行うカーナビゲーション装置に関し、特に動作停止状態で移動された後に起動された場合の自車位置および自車方向を確定する技術に関する。
【背景技術】
【0002】
カーナビゲーション装置は、自車の現在位置(以下、「自車位置」という)および自車が向いている方向(以下、「自車方向」という)を検出し、この検出した結果に基づきディスプレイの画面に自車位置、自車方向および周辺の地図を表示する。したがって、運転者は、地図上に表示された自車位置および自車方向を見ながら車両を走行させることができる。
【0003】
ところで、車両を転回させるためのターンテーブルを備えたタワーパーキング(立体駐車場)に入庫した場合、フェリーに乗船した場合、陸送用の運搬車両に搭載されて移動した場合等においては、カーナビゲーション装置の電源がオフされた状態で自車位置や自車方向が変化する。すなわち、タワーパーキングから出庫する場合、フェリーから下船する場合、運搬車両から降ろされる場合等にカーナビゲーション装置の電源がオンされた時は、自車位置および自車方向は実際とは異なった状態になっている。したがって、ナビゲーションは、実際とは異なった状態から開始されることになり、しばらくの間は、迷走してしまう、すなわち、本来とは異なる方向への進行を案内してしまうという問題があった。
【0004】
このような問題を解消するために、特許文献1は、ターンテーブルを備えた駐車場から出庫する際に自車方位を地図画面に正確に表示することができるナビゲーション装置を開示している。このナビゲーション装置は、現在地を検出する現在地検出手段と、自車方位を検出する自車方位検出手段と、検出された現在地に基づいて所定の範囲内にターンテーブルがあるかどうかを判断するターンテーブル有無判断処理手段と、ターンテーブルがある場合に、自車方位を修正する自車方位修正処理手段とを備えている。
【0005】
【特許文献1】特開2002−267460号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上述した従来のナビゲーション装置は、ターンテーブルを備えた駐車場から出庫する場合は自車方位を地図画面に正確に表示することができるものの、例えばフェリーに乗船した場合や陸送用の運搬車両に搭載されて移動する場合のように、ナビゲーション装置の電源がオフされている状態で位置が変更された場合には、迷走するという問題が残されている。
【0007】
また、従来のナビゲーション装置は、自車位置および自車方向を修正すべき地点から所定範囲内にあるか否かを判断して自車方位を修正するだけであるので、実際にはタワーパーキングへの入庫やフェリーへの乗船がなされていない可能性もあり、この場合は、自車位置および自車方位の修正は不要であるにも拘わらず修正が行われる。例えば、タワーパーキング近辺で短時間だけ停車してナビゲーション装置の電源をオフした後、タワーパーキングに入庫せずに電源をオンにして出発したとき、フェリー乗り場でフェリーに乗船するまでの待ち時間に短時間だけ停車してナビゲーション装置の電源をオフした後に電源をオンしてフェリーに乗船したとき、フェリー乗り場付近で短時間停車してナビゲーション装置の電源をオフしたがフェリーに乗船しないときなどに、自車位置および自車方位の不要な修正が行われる場合がある。
【0008】
この発明は、上述した問題点を解消するためになされたものであり、動作停止状態で移動されても起動時に正常なナビゲーションを開始できるカーナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
この発明に係るカーナビゲーション装置は、現在の位置を検出する位置検出手段と、現在向いている方向を検出する方向検出手段と、位置および方向の少なくとも1つを変更する地点を、変更地点として登録する変更地点登録手段と、起動時に位置検出手段で検出された位置が変更地点登録手段によって登録された変更地点から所定範囲内にあるかどうかを判断する変更地点判断手段と、変更地点判断手段によって所定範囲内にあると判断された場合に、位置検出手段で検出された位置を示す値および方向検出手段で検出された方向を示す値の少なくとも1つを、位置および方向の各々に対してあらかじめ定められた変更値に変更する位置・方向変更手段とを備えている。
【発明の効果】
【0010】
この発明によれば、位置および方向を変更すべき地点を変更地点として登録しておき、起動時に現在の位置が、登録された変更地点から所定範囲内にある場合に、所定の位置および方向に変更するように構成したので、動作停止状態でカーナビゲーション装置が移動されても起動時に正常なナビゲーションを開始できる。
【発明を実施するための最良の形態】
【0011】
以下、この発明の実施の形態を、図面を参照しながら詳細に説明する。
実施の形態1.
図1は、この発明の実施の形態1に係るカーナビゲーション装置の構成を示すブロック図である。このカーナビゲーション装置は、GPS(Global Positioning System)受信機11、ジャイロセンサ12、車速センサ13、データ記録部14、制御処理部15、入力部16、表示部17、音声出力部18および通信部19から構成されている。
【0012】
GPS受信機11は、GPS衛星からの電波を受信して車両の現在位置を検出する。このGPS受信機11において検出された車両の現在位置を表す現在位置データは制御処理部15に送られる。ジャイロセンサ12は、車両が向いている方向を検出する。このジャイロセンサ12で検出された車両が向いている方向を表す方向データは制御処理部15に送られる。車速センサ13は、車両の移動速度を検出する。この車速センサ13で検出された移動速度を表す速度データは制御処理部15に送られる。
【0013】
データ記録部14は、例えばハードディスク(HDD:Hard Disk Drive)やPCカードといった記録メディアから構成されており、地図データ、その他の種々のデータを記憶している。このデータ記録部14は、制御処理部15によってアクセスされる。
【0014】
制御処理部15は、例えばCPU、ROM、RAM等を含むマイクロコンピュータから構成されている。この制御処理部15は、カーナビゲーション装置の全体を制御する。例えば、GPS受信機11から送られてくる現在位置データ、ジャイロセンサから送られてくる方向データおよび車速センサ13から送られてくる速度データに基づいて自車位置および自車方向を検出し、データ記録部14から読み出した地図データに基づいて生成された地図上に、検出された自車位置および自車方向を表す図形(自車マーク)を重畳させて表示部17に表示させる。この制御処理部15の詳細は後述する。
【0015】
入力部16は、この発明の入力手段に対応し、リモートコントローラ、タッチパネル、操作パネルに設けられた各種のボタン等から構成されている。この入力部16、ユーザが当該カーナビゲーション装置に種々の指示を与えるために使用される。この入力部16が操作されることによって発生された入力データは、制御処理部15に送られる。
【0016】
表示部17は、例えば液晶ディスプレイ装置から構成されており、制御処理部15から送られてくる画像データに基づいて、地図上に自車マークが描かれた画像や種々のメッセージを表示する。音声出力部18は、ナビゲーションを行うためのメッセージを音声で出力する。通信部19は、制御処理部15と外部との間の通信を制御する。
【0017】
図2は、この発明の実施の形態1に係るカーナビゲーション装置の機能的な構成を示すブロック図である。このカーナビゲーション装置は、位置検出手段1、方向検出手段2、変更地点登録手段3、変更地点判断手段4、経過時間計測手段5および位置・方向変更手段6から構成されている。これらの構成要素は、主として、制御処理部15における処理によって構成されている。
【0018】
位置検出手段1は、GPS受信機11から送られてくる現在位置データ、ジャイロセンサから送られてくる方向データおよび車速センサ13から送られてくる速度データに基づき自車の現在位置を算出し、自車位置データとして変更地点判断手段4に送る。方向検出手段2は、GPS受信機11から送られてくる現在位置データ、ジャイロセンサから送られてくる方向データおよび車速センサ13から送られてくる速度データに基づき自車が向いている方向を算出し、自車方向データとして位置・方向変更手段6に送る。
【0019】
変更地点登録手段3は、自車位置および自車方向を変更すべき地点を、変更地点として登録して保存する。この変更地点登録手段3における変更地点の登録およびその変更は、利用者が表示部17に表示された画面を見ながら入力部16を操作して入力することにより行われる。この変更地点登録手段3によって登録されて保存されている変更地点は、変更地点データとして変更地点判断手段4および位置・方向変更手段6に送られる。
【0020】
また、この変更地点登録手段3は、上述した変更地点の登録の他に、変更地点判断手段4において使用される「所定範囲」の登録、位置・方向変更手段6において変更に使用される「変更値」の登録、および動作が停止されてからの経過時間の閾値として使用される「閾値時間」の登録にも使用される。
【0021】
なお、変更地点登録手段3における変更地点の登録およびその変更は、入力部16から変更地点データを入力する他に、図示しない音声認識装置を用いた音声操作によって変更地点データを入力することによって行うように構成できる。また、変更地点登録手段3における変更地点の登録およびその変更は、外部から通信部19を経由して受け取った変更地点データや、データ記録部14に格納されている地図データから取得した変更地点データ等を入力することによって行うように構成することもできる。この場合、音声認識装置、通信部19またはデータ記録部14が、この発明の入力手段に対応する。
【0022】
また、変更地点登録手段3は、位置検出手段1で検出された自車の現在位置がGPS受信機11による受信状況の変化に起因して突然に変化するといった位置飛びが発生した場合に、位置飛びの距離や発生頻度に応じて、自動的に、または変更地点を登録すべき旨の催促や変更地点を登録するか否かの問い合わせに応答して利用者が手動で指示した時に、位置飛びが発生する前の地点を変更地点として登録するように構成できる。
【0023】
変更地点判断手段4は、位置検出手段1で検出された自車位置と、変更地点登録手段3から取得された変更地点とを比較し、自車位置が変更地点から所定範囲以内、例えば半径30m以内であるかどうかを判断する。この変更地点判断手段4による判断結果は、位置・方向変更手段6に送られる。
【0024】
経過時間計測手段5は、動作が停止された時刻(例えば、電源オフされた時刻やスタンバイモードに入った時刻9を記録しておき、次に起動された時刻(例えば、電源オンされた時刻やスタンバイモードから復帰した時刻)と比較することにより、動作が停止されている間に経過した時間(以下、「経過時間」という)を計測する。この経過時間計測手段5によって計測された経過時間は、位置・方向変更手段6に送られる。
【0025】
位置・方向変更手段6は、変更地点判断手段4から送られてきた判断結果が所定範囲以内であることを示しており、かつ経過時間計測手段5から送られてきた経過時間が閾値時間、例えば1時間以上であれば、その時点の自車位置を示す値および自車方向を示す値を、あらかじめ定められた変更値にそれぞれ変更する。なお、この変更に用いる位置および方向を示す値としては、変更地点登録手段3によって登録された値の他に、地図データに登録された値、利用者が表示部17を見ながら入力部16から入力した値、または通信部19から取得した値等を用いることもできる。
【0026】
また、経過時間の閾値として使用される閾値時間は、予め準備された固定値、利用者が表示部17を見ながら入力部16から入力した値、または、タワーパーキングやフェリー等といった種別によって自動的に付与された値等を用いることができ、この閾値時間を変更することにより、不要な位置および方向の変更が起こるのを防ぐことが可能になる。
【0027】
次に、上記のように構成される、この発明の実施の形態1に係るカーナビゲーション装置の動作を、自車位置および自車方向を決定する処理を中心に、図3に示すフローチャートを参照しながら説明する。
【0028】
カーナビゲーション装置が起動されると、まず、動作停止時に図示しないメモリに記録された自車位置および自車方向が読み出される(ステップST11)。そして、変更地点登録手段3によって登録された変更地点が残っているかどうかが調べられる(ステップST12)。このステップST12において、登録された変更地点が残っていることが判断されると、次いで、残っている変更地点の1つが取り出され、その取り出された変更地点は自車位置から所定範囲内であるかどうかが調べられる(ステップST13)。このステップST13において、変更地点が自車位置から所定範囲内でないことが判断されると、シーケンスはステップST12に戻る。
【0029】
一方、ステップST13において、変更地点が自車位置から所定範囲内であることが判断されると、次いで、経過時間計測手段5によって計測された経過時間が閾値時間以上であるかどうかが調べられる(ステップST14)。このステップST14において、経過時間が閾値時間以上でないことが判断されると、シーケンスはステップST12に戻る。一方、ステップST14において、経過時間が閾値時間以上であることが判断されると、その変更地点が、自車位置および自車方向の変更に用いる地点候補とされる(ステップST15)。その後、シーケンスは、ステップST12に戻り、以下、同様の処理が繰り返される。
【0030】
上記ステップST12〜ST15の繰り返し実行において、ステップST12において、登録された変更地点が残っていないことが判断されると、次いで、地点候補が1件以上あるかどうかが調べられる(ステップST16)。このステップST16において、地点候補が1件以上ない、つまり地点候補がないことが判断されると、自車位置および自車方向を決定する処理は終了する。
【0031】
一方、上記ステップST16において、地点候補が1件以上あることが判断されると、自車位置から一番近い変更地点が選出される(ステップST17)。次いで、ステップST17において選択された変更地点に、複数組の位置および方向が設定されていれば、その中から1つが利用者によって選択される(ステップST18)。なお、この選択は、経過時間等に応じて自動的に行うように構成することもできる。
【0032】
次いで、その時点の自車位置を示す値および自車方向を示す値が、位置および方向の各々に対してあらかじめ定められた変更値に変更される(ステップST19)。この場合、自車位置および自車方向を自動的に変更する前に、利用者にテロップ表示や音声等によって変更する旨を通知したり、変更の要否の確認するように構成することもできる。以上により、自車位置および自車方向を決定する処理は終了する。
【0033】
以上説明したように、この発明の実施の形態1に係るカーナビゲーション装置によれば、位置および方向を変更すべき地点を変更地点として登録しておき、起動時に現在の位置が登録された変更地点から所定範囲内にある場合に、その時点の位置を示す値および方向示す値を、あらかじめ定められた変更値にそれぞれ変更するように構成したので、例えば、ターンテーブル付のタワーパーキングに入庫したりフェリーに乗船してカーナビゲーション装置の動作が停止された後に、カーナビゲーション装置が移動され、その後、ターンテーブル付のタワーパーキングから出庫したりフェリーから下船するためにカーナビゲーション装置が起動された場合は、その起動直後であっても自車位置および自車方向が正しい値に変更されるので正常なナビゲーションを開始できる。
【0034】
また、自車位置が変更地点から所定範囲内にあり、かつ経過時間が閾値時間以上になった場合に、その時点の位置を示す値および方向示す値が、あらかじめ定められた変更値にそれぞれ変更されるので、閾値時間以内の一時的な動作停止やクランキングの場合などは、自車位置および自車方向の変更が行われない。したがって、不要な自車位置および自車方向の変更が起こるのを削減することができる。
【0035】
また、利用者は、変更地点登録手段3による変更地点、変更地点判断手段4において使用される所定範囲、位置・方向変更手段6において変更に使用される所定の位置および方向、および位置・方向変更手段において使用される閾値時間の登録およびその変更をできるように構成したので、利用者は、自分の行動パターンに適合するように、必要な変更のみを行うことができる。また、利用者は、登録地点の種別、例えばタワーパーキングやフェリー乗り場等によって最適な値を登録できる。
【0036】
また、変更に使用される所定の位置および方向を複数組登録しておき、自車位置が登録地点から所定範囲内にある場合に、動作停止時の位置および方向を、複数組から選択された1組の所定の位置および方向にそれぞれ変更するように構成したので、同じ場所(例えばフェリー乗り場)から、複数の場所(例えばフェリー到着地)に移動する場合にも対応可能である。
【0037】
なお、上述した実施の形態1に係るカーナビゲーション装置においては、位置と方向の両方を変更するように構成したが、位置および方向のどちらか一方のみ変更するように構成することもできる。
【0038】
実施の形態2.
図4は、この発明の実施の形態2に係るカーナビゲーション装置の構成を示すブロック図である。このカーナビゲーション装置は、実施の形態1に係るカーナビゲーション装置に、カメラ20、距離センサ21が追加されるとともに、制御処理部15の内部に画像処理部151が追加されて構成されている。以下では、実施の形態1と異なる部分についてのみ説明する。
【0039】
カメラ20は、車両に設置されており、車両周辺を撮影して監視するために使用される。カメラ20の数は、1台に限らず任意である。また、このカメラ20は、車両の後方を撮影するバックカメラと兼用することもできる。このカメラ20で撮影することによって得られた画像信号は、制御処理部15の内部の画像処理部151に送られる。
【0040】
距離センサ21は、例えば超音波、レーザ、赤外線等を用いて車両から周辺障害物までの距離を測定する。距離センサ21の数は、1台に限らず任意である。この距離センサ21は、車両をバックさせる時に警告を発するためのセンサ等と兼用することもできる。この距離センサ21によって得られた距離信号は、制御処理部15の内部の画像処理部151に送られる。
【0041】
画像処理部151は、カメラ20から送られてくる画像信号および距離センサ21から送られてくる距離信号を処理することにより、カーナビゲーション装置の動作が停止された時の位置および方向と起動時の位置および方向が同一であるかどうかを判断する。
【0042】
図5は、この発明の実施の形態2に係るカーナビゲーション装置の機能的な構成を示すブロック図である。このカーナビゲーション装置は、実施の形態1のそれに、画像・距離演算手段7が追加されて構成されている。以下、実施の形態1と相違する部分についてのみ説明する。
【0043】
画像・距離演算手段7は、この発明の状態変化検出手段に対応する。この画像・距離演算手段7は、カメラ20、距離センサ21および制御処理部15の内部の画像処理部151から構成されており、カメラ20からの画像信号および/または距離センサ21からの距離信号に対して信号処理を行うことにより、動作停止時に保存しておいた画像信号および/または距離信号や、あらかじめ登録された画像信号および/または距離信号と、起動時に取得した画像信号および/または距離信号とを比較し、車両の状態(外部の状態)の変化の有無、つまり同一の位置および方向であるかどうかを演算により判断する。この画像・距離演算手段7における判断結果は、変更地点判断手段4および位置・方向変更手段6に送られる。
【0044】
方向に関しては、例えば、タワーパーキングに入庫した際は、車両後方を向いた距離センサ21で測定される距離は3m以上であるが、動作停止状態でタワーパーキング内において転回されて出庫する際に起動すると、距離センサ21で測定される距離は、1m程度に変化するので、方向が変更されたことを検出できる。タワーパーキング周辺で一時停車しただけの場合や、タワーパーキングの内部で転回されない場合は、これらの値は変化しないことが多い。なお、内部で転回されるタワーパーキングでの出庫時の距離をあらかじめ登録しておけば、車両後方からタワーパーキングの内壁までの距離はほぼ一定であるので、より確実に転回されたことを検出することができる。
【0045】
カメラ20として車両の後方を撮影するバックカメラを用いる場合は、上記と同様の状況においては、入庫時は、タワーパーキングの外部の映像が得られるが、内部で転回されるタワーパーキングでは、出庫時にタワーパーキングの内壁や鏡に映った自車の映像に変化するので、方向が変更されたことを検出できる。タワーパーキング周辺で一時停車しただけの場合や、タワーパーキングの内部で転回されない場合は、これら映像は変化しないことが多い。なお、内部で転回されるタワーパーキングでの出庫時の映像をあらかじめ登録しておけば、車両後方側の映像はほぼ一定であるので、より確実に転回されたことを検出することが可能である。
【0046】
なお、入庫時にカメラ20から得られた映像と出庫時にカメラ20から得られた映像とは完全に一致する必要はなく、映像の一部が同一であれば、動作停止時と起動時とで、同一位置かつ同一方向であると判断することができる。
【0047】
次に、上記のように構成される、この発明の実施の形態2に係るカーナビゲーション装置の動作を、自車位置および自車方向を決定する処理を中心に、図6に示すフローチャートを参照しながら説明する。以下においては、実施の形態1と同一のステップには、図3に示すフローチャートに付した符号と同一の符号を付し、説明を簡略化する。
【0048】
カーナビゲーション装置が起動されると、まず、動作停止時に記録された自車位置および自車方向が読み出される(ステップST11)。次いで、動作停止時と同一位置かつ同一方向であるかどうかが調べられる(ステップST21)。すなわち、画像・距離演算手段7における信号処理の結果が、同一位置かつ同一方向を示しているかどうかが調べられる。このステップST21において、同一位置かつ同一方向であることが判断されると、自車位置および自車方向の変更は不要であると判断され、自車位置および自車方向を決定する処理は終了する。一方、ステップST21において同一位置かつ同一方向でないことが判断されると、シーケンスはステップST12に進む。ステップST12以下の処理は実施の形態1のそれと同じである。
【0049】
以上説明したように、この発明の実施の形態2に係るカーナビゲーション装置によれば、動作停止時と起動時の周辺の状況(カメラ20により得られる映像または距離センサ21により得られる距離)を比較することにより同一位置かつ同一方向であるかどうかを判断し、同一位置かつ同一方向である場合は、自車位置および自車方向の変更を行わないので、不要な変更を低減させることができる。
【0050】
なお、上述した実施の形態2に係るカーナビゲーション装置では、車両に設置された装置で車両周辺を監視することにより車両状態の変化を検出しているが、車両に設置された傾斜センサ等で車両の傾き等の状態を検出するよう構成することもできる。また、周辺カメラ等、車外に設置された装置で車両状態が変化したことを検出するように構成することもできる。
【図面の簡単な説明】
【0051】
【図1】この発明の実施の形態1に係るカーナビゲーション装置の構成を示すブロック図である。
【図2】この発明の実施の形態1に係るカーナビゲーション装置の機能的な構成を示すブロック図である。
【図3】この発明の実施の形態1に係るカーナビゲーション装置の動作を説明するためのフローチャートである。
【図4】この発明の実施の形態2に係るカーナビゲーション装置の構成を示すブロック図である。
【図5】この発明の実施の形態2に係るカーナビゲーション装置の機能的な構成を示すブロック図である。
【図6】この発明の実施の形態2に係るカーナビゲーション装置の動作を説明するためのフローチャートである。
【符号の説明】
【0052】
1 位置検出手段、2 方向検出手段、3 変更地点登録手段、4 変更地点判断手段、5 経過時間計測手段、6 位置・方向変更手段、7 画像・距離演算手段、11 GPS受信機、12 ジャイロセンサ、13 車速センサ、14 データ記録部、15 制御処理部、16 入力部、17 表示部、18 音声出力部、19 通信部、20 カメラ、21 距離センサ、151 画像処理部。
【特許請求の範囲】
【請求項1】
現在の位置を検出する位置検出手段と、
現在向いている方向を検出する方向検出手段と、
位置および方向の少なくとも1つを変更する地点を、変更地点として登録する変更地点登録手段と、
起動時に前記位置検出手段で検出された位置が前記変更地点登録手段によって登録された変更地点から所定範囲内にあるかどうかを判断する変更地点判断手段と、
前記変更地点判断手段によって所定範囲内にあると判断された場合に、前記位置検出手段で検出された位置を示す値および前記方向検出手段で検出された方向を示す値の少なくとも1つを、位置および方向の各々に対してあらかじめ定められた変更値に変更する位置・方向変更手段
とを備えたカーナビゲーション装置。
【請求項2】
動作停止時点からの経過時間を計測する経過時間計測手段を備え、
位置・方向変更手段は、変更地点判断手段によって所定範囲内にあると判断され、かつ前記経過時間計測手段で計測された経過時間が所定の閾値時間以上であれば、位置検出手段で検出された位置を示す値および方向検出手段で検出された方向を示す値の少なくとも1つを、位置および方向の各々に対してあらかじめ定められた変更値に変更する
ことを特徴とする請求項1記載のカーナビゲーション装置。
【請求項3】
位置または範囲を入力する入力手段を備え、
変更地点登録手段は、前記入力手段から位置が入力された場合は該位置を変更地点として登録し、範囲が入力された場合は該範囲を所定範囲として登録する
ことを特徴とする請求項1記載のカーナビゲーション装置。
【請求項4】
値を入力する入力手段を備え、
変更地点登録手段は、前記入力手段から入力された値を、変更地点の位置および方向の各々に対する変更値として該変更地点に対応させて登録し、
位置・方向変更手段は、変更地点判断手段によって所定範囲内にあると判断された場合に、位置検出手段で検出された位置を示す値および方向検出手段で検出された方向を示す値の少なくとも1つを、前記変更地点登録手段によって登録された、変更地点の位置および方向の各々に対する変更値に変更する
ことを特徴とする請求項1記載のカーナビゲーション装置。
【請求項5】
時間を入力する入力手段を備え、
変更地点登録手段は、前記入力手段から入力された時間を閾値時間として登録し、
位置・方向変更手段は、変更地点判断手段によって所定範囲内にあると判断され、かつ経過時間計測手段で計測された経過時間が前記変更地点登録手段によって登録された閾値時間以上であれば、位置検出手段で検出された位置を示す値および方向検出手段で検出された方向を示す値の少なくとも1つを、位置および方向の各々に対してあらかじめ定められた変更値に変更する
ことを特徴とする請求項2記載のカーナビゲーション装置。
【請求項6】
変更地点登録手段は、複数の変更地点を登録し、
位置・方向変更手段は、前記変更地点登録手段によって登録された複数の変更地点の中から1つの変更地点を選択し、該選択した変更地点が変更地点判断手段によって所定範囲内にあると判断された場合に、位置検出手段で検出された位置を示す値および方向検出手段で検出された方向を示す値の少なくとも1つを、位置および方向の各々に対してあらかじめ定められた変更値に変更する
ことを特徴とする請求項1記載のカーナビゲーション装置。
【請求項7】
値を入力する入力手段を備え、
変更地点登録手段は、前記入力手段から入力された複数の値を、複数の変更地点の位置および方向の各々に対する変更値として、複数の変更地点にそれぞれ対応させて登録し、
位置・方向変更手段は、前記変更地点登録手段によって登録された複数の変更地点の中から1つの変更地点を選択し、該選択した変更地点が変更地点判断手段によって所定範囲内にあると判断された場合に、位置検出手段で検出された位置を示す値および方向検出手段で検出された方向を示す値の少なくとも1つを、前記変更地点登録手段によって登録された、変更地点の位置および方向の各々に対する変更値に変更する
ことを特徴とする請求項6記載のカーナビゲーション装置。
【請求項8】
外部の状態の変化を検出する状態変化検出手段を備え、
変更地点判断手段は、前記状態変化検出手段によって外部の状態が変化したことが検出された場合に、位置検出手段で検出された位置が変更地点登録手段によって登録された変更地点から所定範囲内にあるかどうかを判断する
ことを特徴とする請求項1記載のカーナビゲーション装置。
【請求項1】
現在の位置を検出する位置検出手段と、
現在向いている方向を検出する方向検出手段と、
位置および方向の少なくとも1つを変更する地点を、変更地点として登録する変更地点登録手段と、
起動時に前記位置検出手段で検出された位置が前記変更地点登録手段によって登録された変更地点から所定範囲内にあるかどうかを判断する変更地点判断手段と、
前記変更地点判断手段によって所定範囲内にあると判断された場合に、前記位置検出手段で検出された位置を示す値および前記方向検出手段で検出された方向を示す値の少なくとも1つを、位置および方向の各々に対してあらかじめ定められた変更値に変更する位置・方向変更手段
とを備えたカーナビゲーション装置。
【請求項2】
動作停止時点からの経過時間を計測する経過時間計測手段を備え、
位置・方向変更手段は、変更地点判断手段によって所定範囲内にあると判断され、かつ前記経過時間計測手段で計測された経過時間が所定の閾値時間以上であれば、位置検出手段で検出された位置を示す値および方向検出手段で検出された方向を示す値の少なくとも1つを、位置および方向の各々に対してあらかじめ定められた変更値に変更する
ことを特徴とする請求項1記載のカーナビゲーション装置。
【請求項3】
位置または範囲を入力する入力手段を備え、
変更地点登録手段は、前記入力手段から位置が入力された場合は該位置を変更地点として登録し、範囲が入力された場合は該範囲を所定範囲として登録する
ことを特徴とする請求項1記載のカーナビゲーション装置。
【請求項4】
値を入力する入力手段を備え、
変更地点登録手段は、前記入力手段から入力された値を、変更地点の位置および方向の各々に対する変更値として該変更地点に対応させて登録し、
位置・方向変更手段は、変更地点判断手段によって所定範囲内にあると判断された場合に、位置検出手段で検出された位置を示す値および方向検出手段で検出された方向を示す値の少なくとも1つを、前記変更地点登録手段によって登録された、変更地点の位置および方向の各々に対する変更値に変更する
ことを特徴とする請求項1記載のカーナビゲーション装置。
【請求項5】
時間を入力する入力手段を備え、
変更地点登録手段は、前記入力手段から入力された時間を閾値時間として登録し、
位置・方向変更手段は、変更地点判断手段によって所定範囲内にあると判断され、かつ経過時間計測手段で計測された経過時間が前記変更地点登録手段によって登録された閾値時間以上であれば、位置検出手段で検出された位置を示す値および方向検出手段で検出された方向を示す値の少なくとも1つを、位置および方向の各々に対してあらかじめ定められた変更値に変更する
ことを特徴とする請求項2記載のカーナビゲーション装置。
【請求項6】
変更地点登録手段は、複数の変更地点を登録し、
位置・方向変更手段は、前記変更地点登録手段によって登録された複数の変更地点の中から1つの変更地点を選択し、該選択した変更地点が変更地点判断手段によって所定範囲内にあると判断された場合に、位置検出手段で検出された位置を示す値および方向検出手段で検出された方向を示す値の少なくとも1つを、位置および方向の各々に対してあらかじめ定められた変更値に変更する
ことを特徴とする請求項1記載のカーナビゲーション装置。
【請求項7】
値を入力する入力手段を備え、
変更地点登録手段は、前記入力手段から入力された複数の値を、複数の変更地点の位置および方向の各々に対する変更値として、複数の変更地点にそれぞれ対応させて登録し、
位置・方向変更手段は、前記変更地点登録手段によって登録された複数の変更地点の中から1つの変更地点を選択し、該選択した変更地点が変更地点判断手段によって所定範囲内にあると判断された場合に、位置検出手段で検出された位置を示す値および方向検出手段で検出された方向を示す値の少なくとも1つを、前記変更地点登録手段によって登録された、変更地点の位置および方向の各々に対する変更値に変更する
ことを特徴とする請求項6記載のカーナビゲーション装置。
【請求項8】
外部の状態の変化を検出する状態変化検出手段を備え、
変更地点判断手段は、前記状態変化検出手段によって外部の状態が変化したことが検出された場合に、位置検出手段で検出された位置が変更地点登録手段によって登録された変更地点から所定範囲内にあるかどうかを判断する
ことを特徴とする請求項1記載のカーナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2007−3406(P2007−3406A)
【公開日】平成19年1月11日(2007.1.11)
【国際特許分類】
【出願番号】特願2005−185120(P2005−185120)
【出願日】平成17年6月24日(2005.6.24)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成19年1月11日(2007.1.11)
【国際特許分類】
【出願日】平成17年6月24日(2005.6.24)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]