
カーナビゲーション装置
【課題】ジャイロセンサに代わるセンサを方位検出手段として用いても、車両用ターンテーブル付き駐車場からの車両の退出を良好に判定できて、自車両の方位を補正できるようにする。
【解決手段】カーナビゲーション装置1は、GPS受信機11、車輪速センサ12、13を有する位置検出器2と、制御装置5などを備えて構成される。制御装置5は、位置検出器2により自車両位置が所定走行区域から離脱したことが検出され且つ自車両の走行状況が所定パターンに合致したときに自車両が車両用ターンテーブルにより転回されたことを判定し、自車両の方位を補正する。
【解決手段】カーナビゲーション装置1は、GPS受信機11、車輪速センサ12、13を有する位置検出器2と、制御装置5などを備えて構成される。制御装置5は、位置検出器2により自車両位置が所定走行区域から離脱したことが検出され且つ自車両の走行状況が所定パターンに合致したときに自車両が車両用ターンテーブルにより転回されたことを判定し、自車両の方位を補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用ターンテーブル付き駐車場からの退出判定を行うようにしたカーナビゲーション装置に関する。
【背景技術】
【0002】
推測航法とマップマッチング法により車両位置を算出するカーナビゲーション装置においては、電源オン状態では、車両の方位変化を算出できるジャイロセンサを使用するのが一般的である。ジャイロセンサを搭載したカーナビゲーション装置としては例えば特許文献1がある。
【特許文献1】特開2006−4223号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、カーナビゲーション装置においては、コストダウンを図るために、ジャイロセンサを廃止し、車両に装着されるステアリングセンサと車速センサ、あるいは左右車輪に装着される車輪速センサといったセンサをジャイロセンサの代わりの方位検出手段として利用し、その信号を取り込んで、方位変化を算出する方法が検討されている。この方法では、車両が車両用ターンテーブル付き駐車場(例えば、いわゆるタワーパーキング)からの退出した場合を認識できなくなるという不都合が考えられる。
【0004】
すなわち、車両用ターンテーブル付き駐車場の車両格納室から出る際に電源オンされた車両は、該車両格納室を出た後、車両用ターンテーブルで概ね180度転回される。この場合、ジャイロセンサでその方位変化を検出することができたが、上記ジャイロセンサに代わる方位検出手段では、直接的に方位変化を検出できないという問題がある。
【0005】
本発明は上記事情に鑑みてなされたものであり、その目的は、ジャイロセンサに代わるセンサを方位検出手段として用いても、車両用ターンテーブル付き駐車場からの退出を良好に判定できて、自車両の方位を補正できるカーナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0006】
本願発明者は、車両が、車両用ターンテーブル付き駐車場に入り、そして出る場合、車両の挙動として或るパターンを示すことに着目した。すなわち、一般的に、車両が車両用ターンテーブル付き駐車場に入る場合には、道路から離脱して車両用ターンテーブル付き駐車場に入り、そして車両格納室(リフト室)に入り、車両スイッチをオフする。車両が車両用ターンテーブル付き駐車場から出るときには、車両格納室で車両スイッチをオンし、該車両格納室から車両用ターンテーブル上までリバース走行し、該車両用ターンテーブルが転回し終わるのを待ち、その後フォワード走行して車両用ターンテーブル付き駐車場から出る、というものである。
【0007】
この点を考慮した請求項1の発明によれば、車両転回判定手段は、位置検出手段により自車両位置が所定走行区域から離脱したことが検出され且つ車両状況検出手段により検出された自車両の走行状況が所定パターンに合致したときに自車両が車両用ターンテーブルにより転回されたことを判定するから、方位検出手段としてジャイロセンサを用いなくとも、車両用ターンテーブル付き駐車場からの車両の退出を良好に判定でき、そして、補正手段により車両用ターンテーブル付き駐車場から出車直後に自車両の方位を補正できる。そして、ジャイロセンサを用いない構成を採用できることにより、コストダウンを図ることができる。
【0008】
この場合、前記方位検出手段は、自車両の左右の車輪の速度を測定する少なくとも2つの車輪速センサから構成として良く(請求項2の発明)、これによれば、左右の車輪速センサの速度信号の内外輪差に基づいて車両方位を検出でき、所期のナビゲーション機能を不足なく得ることができる。
【0009】
また、前記方位検出手段は、自車両の速度を測定する車速センサと、ステアリングセンサとを備えた構成としても良く(請求項3の発明)、これによれば、車速センサからの信号と、ステアリングセンサからの信号とに基づいて車両方位を検出でき、所期のナビゲーション機能を不足なく得ることができる。
【0010】
また、前記所定走行区域を道路とし、前記所定パターンを、前記車両スイッチオフ、その後該車両スイッチオン、その後リバース方向へ所定距離走行して停止、所定時間停車後フォワード方向へ走行開始といった動作パターンとしても良い(請求項4の発明)。これによれば、方位検出手段としてジャイロセンサを用いなくとも、車両用ターンテーブル付き駐車場からの退出を確実に判定できるようになる。
【発明を実施するための最良の形態】
【0011】
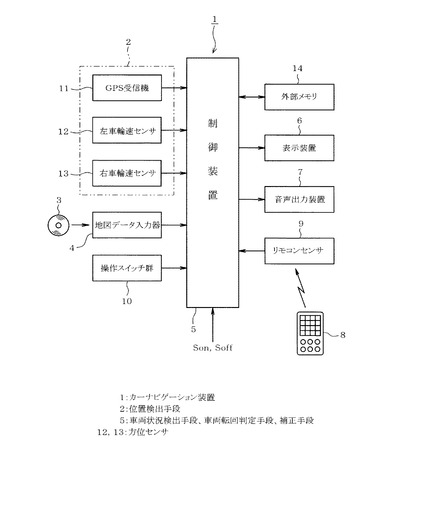
以下、本発明の一実施例について説明する。図1はカーナビゲーション装置1の電気的構成を示すブロック図である。この図1に示すカーナビゲーション装置1は、位置検出器2と、地図データ記憶手段たるCD−ROM、DVD−ROM等の地図データ記録媒体3から地図データを読み取る地図データ入力器4と、ナビゲーションに必要な各種処理を実行する制御装置5と、地図などの表示を行なう報知手段たる表示装置6と、音声を出力する報知手段たる音声出力装置7と、リモコン8からの信号を受信するリモコンセンサ9と、ナビゲーションに必要な各種操作を行なうための操作スイッチ群10と、外部メモリ14とを備えて構成されている。また、前記制御装置5には、車両スイッチとしてのイグニッションスイッチからのオンオフ信号Son、Soffが与えられるようになっている。
【0012】
前記位置検出器2は、車両位置を検出する自車両位置検出手段に相当するものであり、GPS受信機11と、車輪速センサである左車輪速センサ12及び右車輪速センサ13とを備えて構成されており、GPS受信機により受信するGPS信号には、車両位置情報や時刻情報が含まれている。また左車輪速センサ12及び右車輪速センサ13は夫々車両の例えば左側前輪及び右側前輪の車輪速を検出し、走行距離や操舵角を検出するものである。この場合、車両には左右の後輪にも車輪速センサを備えており、これら4つの車輪速センサは、例えばアンチロック制御機能のために車両に備えられており、本実施例では、上記左車輪速センサ12及び右車輪速センサ13をカーナビゲーション装置1に利用している。
【0013】
前記地図データ記録媒体3には、地図表示に用いられる地図データ、マップマッチングに用いられる地図データ、及び経路案内に用いられる地図データ、各種施設の位置データなどが含まれている。また、上述した各地図データには、道路上のノード(要となる地点、交差点(分岐部)を含む)及びリンクについての情報が設定されている。さらに、道路のカーブ半径や路面傾斜角などの道路状況データも含まれている。
【0014】
前記制御装置5は、CPU、ROM、RAM、I/Oインターフェース及びこれらを接続するバスラインなど(いずれも図示せず)を含んで構成されており、ROMには、目的地設定、ルート設定、音声案内(ルート案内)、表示制御、車両状況検出、車両転回判定、補正などに関するプログラムを格納しており、この制御装置5は、車両状況検出手段、車両転回判定手段及び補正手段としても機能する。上記車両状況検出手段としての機能は、イグニッションスイッチのオンオフを前記オンオフ信号Son、Soffから検出すると共に、走行開始及び停止を左右の車輪速センサ12、13からの信号により検出し、走行時間を内部ソフトタイマー機能により検出し、及び走行方向を前記左右の車輪速センサ12、13からの信号により検出する機能である。
【0015】
前記操作スイッチ群10及びリモコン8は入力手段たるものであり、各種設定を行うためのものである。前記外部メモリ14は例えばフラッシュメモリカードやハードデスクドライブなどから構成されており、適宜データを記憶したり、読み出したりするものである。
【0016】
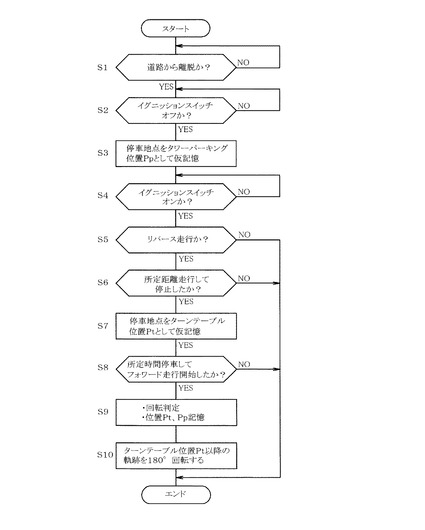
前記制御装置5の制御内容について図2のフローチャートに従って説明する。
自車位置表示制御時(ルート案内機能実行中における自車位置表示制御でも良いし単なる自車位置表示制御でも良い)において、ステップS1では、位置検出器2からの信号と地図データとから、自車両が所定走行区域としての道路から離脱したか否かを検出する。そして、離脱したことが検出されると、ステップS2で車両スイッチとしてのイグニッションスイッチがオフされたか否かを判断する。このステップS1、ステップS2の判定処理の趣旨は、自車両が駐車場で停車したか否かを判定するものである。
【0017】
次のステップS3では、この停車地点をとりあえず車両用ターンテーブル付き駐車場(タワーパーキング)位置として仮記憶(一時的に記憶)する。そしてステップS4では、イグニッションスイッチがオンされたか否かを判断する。この判断の趣旨は、駐車場から出ることになったことを検出するためである。
【0018】
次のステップS5では、車輪速センサ12、13からの信号に基づいて自車両がリバース方向へ走行したか否かを判断する。この判断の趣旨は、駐車場がタワーパーキングであったとするとリバース方向へ走行すると想定しており、リバース方向の走行が判断されれば、駐車場がタワーパーキングであったと想定できる。
【0019】
次のステップS6では、所定距離走行して停止したか否かを判断する。この判断の趣旨は、駐車場がタワーパーキングであったとすると、車両格納室から車両用ターンテーブルまで、ある程度短い距離を走行することを判断するところにある。そして、ステップS7では、この停車地点をとりあえずターンテーブル位置Ptとして仮記憶する。
【0020】
次のステップS8では、所定時間停車し且つフォワード方向へ走行開始したか否かを判断する。この判断の趣旨は、上記位置Ptに車両用ターンテーブルがあったとすると、該車両用ターンテーブルの転回に所定時間を要するから、この所定時間を要したことを判断し、そして、上記位置Ptに車両用ターンテーブルがあったとすると、この所定時間以後の走行方向はフォワード方向であるから、これを判断するところにある。
【0021】
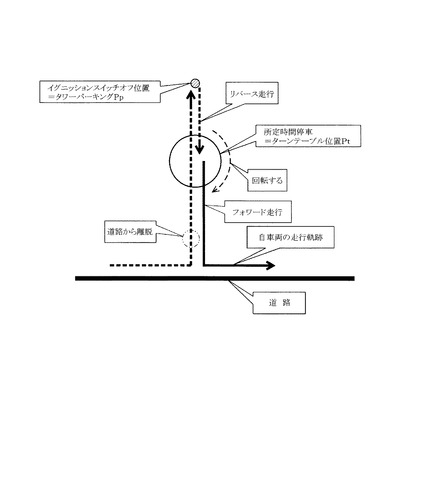
このステップS8で「YES」となると、ステップS9で、自車両がタワーパーキングに駐車されて転回されたことを判断し、上記各位置Pp及びPtを外部メモリ14に記憶し、次回の走行に駐車場データとして利用するようにする。ここまでにおける自車両の挙動は図3のようになる。
そして、前記ターンテーブル位置Pt以降の軌跡(方位)を180度回転する補正を行う。なお、前記ステップS5、ステップS6、ステップS8で「NO」と判断された時には、ステップS9、ステップS10の処理はなされない。
【0022】
上述した本実施例によれば、位置検出器2により自車両位置が所定走行区域である道路から離脱したことが検出され且つ自車両の走行状況が所定パターンに合致したときに自車両が車両用ターンテーブルにより転回されたことを判定するから、方位検出手段としてジャイロセンサを用いなくとも、タワーパーキングからの車両の退出を良好に判定できる。そして、タワーパーキングから出車直後(車両用ターンテーブルから退出直後)に自車両の方位を補正できる。そして、ジャイロセンサを用いない構成を採用できることにより、コストダウンを図ることができる。
【0023】
また、本実施例によれば、方位検出手段として、自車両の左右の車輪の速度を測定する左車輪速センサ12及び右車輪速センサ13から構成としたから、これら左右の車輪速センサ12、13の速度信号の内外輪差に基づいて車両方位を検出でき、所期のナビゲーション機能を不足なく得ることができる。
【0024】
また、本実施例によれば、前記所定走行区域を道路とし、前記所定パターンを、前記イグニッションスイッチオフ、その後該イグニッションスイッチオン、その後リバース方向へ所定距離走行して停止、所定時間停車後フォワード方向へ走行開始といった動作パターンとしたから、方位検出手段としてジャイロセンサを用いなくとも、車両用ターンテーブル付き駐車場からの退出を確実に判定できる。
【0025】
なお、本発明は、上記した実施例に限られず、例えば、方位検出手段としては、自車両の速度を測定する車速センサと、ステアリングセンサとを備えた構成としても良い。このようにすれば、車速センサからの信号と、ステアリングセンサからの信号(操舵角信号)とに基づいて車両方位を検出でき、所期のナビゲーション機能を不足なく得ることができる。なお、車速センサは、例えば、後輪駆動車のドライブシャフトの回転速度を検出する構成である。また、車輪速センサは、車両の4輪に対応して設けられた4つの車輪速センサを利用しても良い。
【図面の簡単な説明】
【0026】
【図1】本発明の一実施例を示すカーナビゲーション装置の電気的構成のブロック図
【図2】制御内容を示すフローチャート
【図3】車両の挙動を示す図
【符号の説明】
【0027】
図面中、1はカーナビゲーション装置、2は位置検出器(位置検出手段)、3は地図データ記録媒体、5は制御装置(車両状況検出手段、車両転回判定手段、補正手段)、11はGPS受信機、12は左車輪速センサ(車輪速センサ)、13は右車輪速センサ(車輪速センサ)を示す。
【技術分野】
【0001】
本発明は、車両用ターンテーブル付き駐車場からの退出判定を行うようにしたカーナビゲーション装置に関する。
【背景技術】
【0002】
推測航法とマップマッチング法により車両位置を算出するカーナビゲーション装置においては、電源オン状態では、車両の方位変化を算出できるジャイロセンサを使用するのが一般的である。ジャイロセンサを搭載したカーナビゲーション装置としては例えば特許文献1がある。
【特許文献1】特開2006−4223号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、カーナビゲーション装置においては、コストダウンを図るために、ジャイロセンサを廃止し、車両に装着されるステアリングセンサと車速センサ、あるいは左右車輪に装着される車輪速センサといったセンサをジャイロセンサの代わりの方位検出手段として利用し、その信号を取り込んで、方位変化を算出する方法が検討されている。この方法では、車両が車両用ターンテーブル付き駐車場(例えば、いわゆるタワーパーキング)からの退出した場合を認識できなくなるという不都合が考えられる。
【0004】
すなわち、車両用ターンテーブル付き駐車場の車両格納室から出る際に電源オンされた車両は、該車両格納室を出た後、車両用ターンテーブルで概ね180度転回される。この場合、ジャイロセンサでその方位変化を検出することができたが、上記ジャイロセンサに代わる方位検出手段では、直接的に方位変化を検出できないという問題がある。
【0005】
本発明は上記事情に鑑みてなされたものであり、その目的は、ジャイロセンサに代わるセンサを方位検出手段として用いても、車両用ターンテーブル付き駐車場からの退出を良好に判定できて、自車両の方位を補正できるカーナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0006】
本願発明者は、車両が、車両用ターンテーブル付き駐車場に入り、そして出る場合、車両の挙動として或るパターンを示すことに着目した。すなわち、一般的に、車両が車両用ターンテーブル付き駐車場に入る場合には、道路から離脱して車両用ターンテーブル付き駐車場に入り、そして車両格納室(リフト室)に入り、車両スイッチをオフする。車両が車両用ターンテーブル付き駐車場から出るときには、車両格納室で車両スイッチをオンし、該車両格納室から車両用ターンテーブル上までリバース走行し、該車両用ターンテーブルが転回し終わるのを待ち、その後フォワード走行して車両用ターンテーブル付き駐車場から出る、というものである。
【0007】
この点を考慮した請求項1の発明によれば、車両転回判定手段は、位置検出手段により自車両位置が所定走行区域から離脱したことが検出され且つ車両状況検出手段により検出された自車両の走行状況が所定パターンに合致したときに自車両が車両用ターンテーブルにより転回されたことを判定するから、方位検出手段としてジャイロセンサを用いなくとも、車両用ターンテーブル付き駐車場からの車両の退出を良好に判定でき、そして、補正手段により車両用ターンテーブル付き駐車場から出車直後に自車両の方位を補正できる。そして、ジャイロセンサを用いない構成を採用できることにより、コストダウンを図ることができる。
【0008】
この場合、前記方位検出手段は、自車両の左右の車輪の速度を測定する少なくとも2つの車輪速センサから構成として良く(請求項2の発明)、これによれば、左右の車輪速センサの速度信号の内外輪差に基づいて車両方位を検出でき、所期のナビゲーション機能を不足なく得ることができる。
【0009】
また、前記方位検出手段は、自車両の速度を測定する車速センサと、ステアリングセンサとを備えた構成としても良く(請求項3の発明)、これによれば、車速センサからの信号と、ステアリングセンサからの信号とに基づいて車両方位を検出でき、所期のナビゲーション機能を不足なく得ることができる。
【0010】
また、前記所定走行区域を道路とし、前記所定パターンを、前記車両スイッチオフ、その後該車両スイッチオン、その後リバース方向へ所定距離走行して停止、所定時間停車後フォワード方向へ走行開始といった動作パターンとしても良い(請求項4の発明)。これによれば、方位検出手段としてジャイロセンサを用いなくとも、車両用ターンテーブル付き駐車場からの退出を確実に判定できるようになる。
【発明を実施するための最良の形態】
【0011】
以下、本発明の一実施例について説明する。図1はカーナビゲーション装置1の電気的構成を示すブロック図である。この図1に示すカーナビゲーション装置1は、位置検出器2と、地図データ記憶手段たるCD−ROM、DVD−ROM等の地図データ記録媒体3から地図データを読み取る地図データ入力器4と、ナビゲーションに必要な各種処理を実行する制御装置5と、地図などの表示を行なう報知手段たる表示装置6と、音声を出力する報知手段たる音声出力装置7と、リモコン8からの信号を受信するリモコンセンサ9と、ナビゲーションに必要な各種操作を行なうための操作スイッチ群10と、外部メモリ14とを備えて構成されている。また、前記制御装置5には、車両スイッチとしてのイグニッションスイッチからのオンオフ信号Son、Soffが与えられるようになっている。
【0012】
前記位置検出器2は、車両位置を検出する自車両位置検出手段に相当するものであり、GPS受信機11と、車輪速センサである左車輪速センサ12及び右車輪速センサ13とを備えて構成されており、GPS受信機により受信するGPS信号には、車両位置情報や時刻情報が含まれている。また左車輪速センサ12及び右車輪速センサ13は夫々車両の例えば左側前輪及び右側前輪の車輪速を検出し、走行距離や操舵角を検出するものである。この場合、車両には左右の後輪にも車輪速センサを備えており、これら4つの車輪速センサは、例えばアンチロック制御機能のために車両に備えられており、本実施例では、上記左車輪速センサ12及び右車輪速センサ13をカーナビゲーション装置1に利用している。
【0013】
前記地図データ記録媒体3には、地図表示に用いられる地図データ、マップマッチングに用いられる地図データ、及び経路案内に用いられる地図データ、各種施設の位置データなどが含まれている。また、上述した各地図データには、道路上のノード(要となる地点、交差点(分岐部)を含む)及びリンクについての情報が設定されている。さらに、道路のカーブ半径や路面傾斜角などの道路状況データも含まれている。
【0014】
前記制御装置5は、CPU、ROM、RAM、I/Oインターフェース及びこれらを接続するバスラインなど(いずれも図示せず)を含んで構成されており、ROMには、目的地設定、ルート設定、音声案内(ルート案内)、表示制御、車両状況検出、車両転回判定、補正などに関するプログラムを格納しており、この制御装置5は、車両状況検出手段、車両転回判定手段及び補正手段としても機能する。上記車両状況検出手段としての機能は、イグニッションスイッチのオンオフを前記オンオフ信号Son、Soffから検出すると共に、走行開始及び停止を左右の車輪速センサ12、13からの信号により検出し、走行時間を内部ソフトタイマー機能により検出し、及び走行方向を前記左右の車輪速センサ12、13からの信号により検出する機能である。
【0015】
前記操作スイッチ群10及びリモコン8は入力手段たるものであり、各種設定を行うためのものである。前記外部メモリ14は例えばフラッシュメモリカードやハードデスクドライブなどから構成されており、適宜データを記憶したり、読み出したりするものである。
【0016】
前記制御装置5の制御内容について図2のフローチャートに従って説明する。
自車位置表示制御時(ルート案内機能実行中における自車位置表示制御でも良いし単なる自車位置表示制御でも良い)において、ステップS1では、位置検出器2からの信号と地図データとから、自車両が所定走行区域としての道路から離脱したか否かを検出する。そして、離脱したことが検出されると、ステップS2で車両スイッチとしてのイグニッションスイッチがオフされたか否かを判断する。このステップS1、ステップS2の判定処理の趣旨は、自車両が駐車場で停車したか否かを判定するものである。
【0017】
次のステップS3では、この停車地点をとりあえず車両用ターンテーブル付き駐車場(タワーパーキング)位置として仮記憶(一時的に記憶)する。そしてステップS4では、イグニッションスイッチがオンされたか否かを判断する。この判断の趣旨は、駐車場から出ることになったことを検出するためである。
【0018】
次のステップS5では、車輪速センサ12、13からの信号に基づいて自車両がリバース方向へ走行したか否かを判断する。この判断の趣旨は、駐車場がタワーパーキングであったとするとリバース方向へ走行すると想定しており、リバース方向の走行が判断されれば、駐車場がタワーパーキングであったと想定できる。
【0019】
次のステップS6では、所定距離走行して停止したか否かを判断する。この判断の趣旨は、駐車場がタワーパーキングであったとすると、車両格納室から車両用ターンテーブルまで、ある程度短い距離を走行することを判断するところにある。そして、ステップS7では、この停車地点をとりあえずターンテーブル位置Ptとして仮記憶する。
【0020】
次のステップS8では、所定時間停車し且つフォワード方向へ走行開始したか否かを判断する。この判断の趣旨は、上記位置Ptに車両用ターンテーブルがあったとすると、該車両用ターンテーブルの転回に所定時間を要するから、この所定時間を要したことを判断し、そして、上記位置Ptに車両用ターンテーブルがあったとすると、この所定時間以後の走行方向はフォワード方向であるから、これを判断するところにある。
【0021】
このステップS8で「YES」となると、ステップS9で、自車両がタワーパーキングに駐車されて転回されたことを判断し、上記各位置Pp及びPtを外部メモリ14に記憶し、次回の走行に駐車場データとして利用するようにする。ここまでにおける自車両の挙動は図3のようになる。
そして、前記ターンテーブル位置Pt以降の軌跡(方位)を180度回転する補正を行う。なお、前記ステップS5、ステップS6、ステップS8で「NO」と判断された時には、ステップS9、ステップS10の処理はなされない。
【0022】
上述した本実施例によれば、位置検出器2により自車両位置が所定走行区域である道路から離脱したことが検出され且つ自車両の走行状況が所定パターンに合致したときに自車両が車両用ターンテーブルにより転回されたことを判定するから、方位検出手段としてジャイロセンサを用いなくとも、タワーパーキングからの車両の退出を良好に判定できる。そして、タワーパーキングから出車直後(車両用ターンテーブルから退出直後)に自車両の方位を補正できる。そして、ジャイロセンサを用いない構成を採用できることにより、コストダウンを図ることができる。
【0023】
また、本実施例によれば、方位検出手段として、自車両の左右の車輪の速度を測定する左車輪速センサ12及び右車輪速センサ13から構成としたから、これら左右の車輪速センサ12、13の速度信号の内外輪差に基づいて車両方位を検出でき、所期のナビゲーション機能を不足なく得ることができる。
【0024】
また、本実施例によれば、前記所定走行区域を道路とし、前記所定パターンを、前記イグニッションスイッチオフ、その後該イグニッションスイッチオン、その後リバース方向へ所定距離走行して停止、所定時間停車後フォワード方向へ走行開始といった動作パターンとしたから、方位検出手段としてジャイロセンサを用いなくとも、車両用ターンテーブル付き駐車場からの退出を確実に判定できる。
【0025】
なお、本発明は、上記した実施例に限られず、例えば、方位検出手段としては、自車両の速度を測定する車速センサと、ステアリングセンサとを備えた構成としても良い。このようにすれば、車速センサからの信号と、ステアリングセンサからの信号(操舵角信号)とに基づいて車両方位を検出でき、所期のナビゲーション機能を不足なく得ることができる。なお、車速センサは、例えば、後輪駆動車のドライブシャフトの回転速度を検出する構成である。また、車輪速センサは、車両の4輪に対応して設けられた4つの車輪速センサを利用しても良い。
【図面の簡単な説明】
【0026】
【図1】本発明の一実施例を示すカーナビゲーション装置の電気的構成のブロック図
【図2】制御内容を示すフローチャート
【図3】車両の挙動を示す図
【符号の説明】
【0027】
図面中、1はカーナビゲーション装置、2は位置検出器(位置検出手段)、3は地図データ記録媒体、5は制御装置(車両状況検出手段、車両転回判定手段、補正手段)、11はGPS受信機、12は左車輪速センサ(車輪速センサ)、13は右車輪速センサ(車輪速センサ)を示す。
【特許請求の範囲】
【請求項1】
GPS受信機と方位検出手段とを備えて自車両位置を検出する位置検出手段と、
自車両の車両スイッチのオンオフ、走行開始及び停止、走行時間、及び走行方向を検出する車両状況検出手段と、
前記位置検出手段により自車両位置が所定走行区域から離脱したことが検出され且つ前記車両状況検出手段により検出された自車両の走行状況が所定パターンに合致したときに自車両が車両用ターンテーブルにより転回されたことを判定する車両転回判定手段と、
この車両転回判定手段により自車両の転回が判定されたときに、この判定結果により、自車両の方位を補正する補正手段と
を備えたことを特徴とするカーナビゲーション装置。
【請求項2】
前記請求項1に記載のカーナビゲーション装置において、
前記方位検出手段は、自車両の左右の車輪の速度を測定する少なくとも2つの車輪速センサから構成されていることを特徴とするカーナビゲーション装置。
【請求項3】
前記請求項1に記載のカーナビゲーション装置において、
前記方位検出手段は、自車両の速度を測定する車速センサと、ステアリングセンサとを備えて構成されていることを特徴とするカーナビゲーション装置。
【請求項4】
前記請求項1〜3のいずれかに記載のカーナビゲーション装置において、
前記所定走行区域は道路であり、
前記所定パターンは、前記車両スイッチオフ、その後該車両スイッチオン、その後リバース方向へ所定距離走行して停止、所定時間停車後フォワード方向へ走行開始といった動作パターンであることを特徴とするカーナビゲーション装置。
【請求項1】
GPS受信機と方位検出手段とを備えて自車両位置を検出する位置検出手段と、
自車両の車両スイッチのオンオフ、走行開始及び停止、走行時間、及び走行方向を検出する車両状況検出手段と、
前記位置検出手段により自車両位置が所定走行区域から離脱したことが検出され且つ前記車両状況検出手段により検出された自車両の走行状況が所定パターンに合致したときに自車両が車両用ターンテーブルにより転回されたことを判定する車両転回判定手段と、
この車両転回判定手段により自車両の転回が判定されたときに、この判定結果により、自車両の方位を補正する補正手段と
を備えたことを特徴とするカーナビゲーション装置。
【請求項2】
前記請求項1に記載のカーナビゲーション装置において、
前記方位検出手段は、自車両の左右の車輪の速度を測定する少なくとも2つの車輪速センサから構成されていることを特徴とするカーナビゲーション装置。
【請求項3】
前記請求項1に記載のカーナビゲーション装置において、
前記方位検出手段は、自車両の速度を測定する車速センサと、ステアリングセンサとを備えて構成されていることを特徴とするカーナビゲーション装置。
【請求項4】
前記請求項1〜3のいずれかに記載のカーナビゲーション装置において、
前記所定走行区域は道路であり、
前記所定パターンは、前記車両スイッチオフ、その後該車両スイッチオン、その後リバース方向へ所定距離走行して停止、所定時間停車後フォワード方向へ走行開始といった動作パターンであることを特徴とするカーナビゲーション装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2008−196996(P2008−196996A)
【公開日】平成20年8月28日(2008.8.28)
【国際特許分類】
【出願番号】特願2007−33454(P2007−33454)
【出願日】平成19年2月14日(2007.2.14)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成20年8月28日(2008.8.28)
【国際特許分類】
【出願日】平成19年2月14日(2007.2.14)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]