
カーナビゲーション装置
【課題】ユーザによる操作を必要とすることなくオンルートスクロール案内機能を実行することができるカーナビゲーション装置を提供する。
【解決手段】経路案内機能の実行中に自車両が停止した場合にオンルートスクロール案内機能の実行を開始する。
【解決手段】経路案内機能の実行中に自車両が停止した場合にオンルートスクロール案内機能の実行を開始する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、カーナビゲーション装置に関するものである。
【背景技術】
【0002】
従来、目的地までの道路地図上の経路に沿って仮想自車両が走行する状態を表示し、この仮想車両の進行に応じて経路の案内を仮想的に行うオンルートスクロール案内機能を備えた装置がある(例えば、特許文献1及び特許文献2参照。)。カーナビゲーション装置のユーザは、このオンルートスクロール案内機能を使用して、目的地までの仮想経路案内を実行させることで、これから走行する予定の経路の情報が得られる。
【特許文献1】特開2003−21529号公報
【特許文献2】特開2004−361238号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記特許文献1に記載のものは、経路の出発地を出発する前にオンルートスクロール表示するものであるため、出発地を出発した後に再びオンルートスクロール表示させようとする場合、ユーザ自身がオンルートスクロール案内機能の実行を開始するための操作を要する。また、上記特許文献2のものは、出発前に全経路をオンルートスクロール(案内シミュレーション)するものであり、経路の出発地を出発した後にシミュレーションを行うものではない。
【0004】
このように、従来のオンルートスクロール案内機能は、ユーザが、これから走行しようとする経路の情報や道路形態を知りたい場合(経路探索した直後だけでなく、自車両が信号で停止している時や渋滞で停止している時も含む)には、その都度、オンルートスクロール案内機能を選択して、スクロール開始/停止ボタンを押下したり、車両走行開始時に「現在地ボタン」を押下することが必要である。そのため、ユーザにとっては、これから走行しようとする経路の経路情報や道路形態を知るための操作が面倒である問題があった。
【0005】
本発明は、上記の問題を鑑みてなされたもので、ユーザによる操作を必要とすることなくオンルートスクロール案内機能を実行することができるカーナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項1記載のカーナビゲーション装置は、
目的地へ向かう経路の案内を行う経路案内手段と、
道路地図上の経路に沿って仮想自車両が走行する状態を表示し、当該仮想自車両の進行に応じて経路の案内を仮想的に行うオンルートスクロール案内機能を実行するオンルートスクロール案内手段と、を備えるものであって、
オンルートスクロール案内手段は、経路案内手段による経路案内の実行中に自車両が停止した場合に、オンルートスクロール案内機能の実行を開始するものである。
【0007】
これにより、自車両に搭載されたカーナビゲーション装置で経路案内を行っている時に自車両が交差点等において赤信号で停車した際、オンルートスクロール案内機能の実行を自動的に開始することが可能となるので、オンルートスクロール案内機能の実行を開始するためのユーザによる操作が不要となる。その結果、ユーザは、経路案内中であっても、これから走行しようとする経路の情報や道路形態を知ることができるようになるのである。
【0008】
請求項2に記載のように、オンルートスクロール案内手段は、道路地図上の経路に沿って仮想自車両が走行する状態と、その仮想自車両の位置に対応する経路案内情報、道路形態情報、及び周辺施設情報の少なくとも1つの情報と、を並べて表示することが好ましい。これにより、ユーザは、道路地図上の経路に沿って進行する仮想自車両の位置とともに、その位置における上記の各種情報を同時に把握することが可能になるからである。
【0009】
請求項3に記載のカーナビゲーション装置によれば、オンルートスクロール案内手段は、自車両の停止した位置に対応する道路地図上の位置を仮想自車両の走行開始位置として設定するとともに、その設定した仮想自車両の走行開始位置から経路に沿った所定距離前方の位置を仮想自車両の走行終了位置として設定する走行開始終了位置設定手段を備えることを特徴とする。
【0010】
これにより、仮想自車両の走行開始位置から所定距離前方の走行終了位置までの経路の区間におけるオンルートスクロール案内機能を実行することができる。
【0011】
なお、請求項4に記載のように、オンルートスクロール案内手段は、仮想自車両の走行開始位置から走行終了位置までの経路の区間におけるオンルートスクロール案内機能の実行を所定回数繰り返すようにすることで、同じ区間のオンルートスクロール案内機能の実行を開始するためのユーザによる操作が不要となるとともに、上記の各種情報を繰り返し確認することができるようになる。
【0012】
また、請求項5に記載のように、オンルートスクロール案内手段は、仮想自車両の走行開始位置から走行終了位置までの経路の区間におけるオンルートスクロール案内機能の実行を所定回数繰り返した場合には、その後、その区間と同一の区間におけるオンルートスクロール案内機能の実行を見送るようにしてもよい。ユーザが確認した情報を過度に重複して提供しないようにするためである。
【0013】
請求項6に記載のカーナビゲーション装置によれば、走行開始終了位置設定手段は、自車両が発進と停止を頻繁に繰り返す場合には、前回オンルートスクロール案内機能を実行して終了したときの仮想自車両の位置を、今回オンルートスクロール案内機能を実行する際の仮想自車両の走行開始位置として設定することを特徴とする。
【0014】
例えば、渋滞区間等では発進と停止を頻繁に繰り返すことになるが、このような場合に自車両が停止する度にオンルートスクロール案内機能を実行させると、提供済みの情報を過度に重複して提供するようになる。
【0015】
そこで、走行開始終了位置設定手段は、自車両が発進と停止を頻繁に繰り返す場合(例えば、自車両が発進して停止するまでの経過時間/走行距離が一定時間/一定距離に満たない場合)には、前回オンルートスクロール案内機能を実行して終了したときの仮想自車両の位置を、今回オンルートスクロール案内機能を実行する際の仮想自車両の走行開始位置として設定する。これにより、提供済みの情報を過度に重複して提供することがなくなる。
【0016】
また、請求項7に記載のように、走行開始終了位置設定手段は、前回オンルートスクロール案内機能を実行して終了したときの仮想自車両の位置が、自車両が停止した位置に対応する道路地図上の位置よりも経路の進行方向に対し後方である場合には、自車両が停止した位置に対応する道路地図上の位置を仮想自車両の走行開始位置として設定することが好ましい。自車両が停止した位置から経路の後方の情報は、その多くがユーザにとって不要な情報となるからである。
【0017】
請求項8に記載のカーナビゲーション装置によれば、オンルートスクロール案内手段は、自車両が道路地図上の道路から外れた場所に位置する場合に、オンルートスクロール案内機能の実行を見送ること特徴とする。
【0018】
例えば、道路地図を表示するために用いられる地図データが新たに設置された道路のデータを含んでいない場合、その道路を自車両が走行すると、道路地図上では道路から外れた場所に位置するようになり、その結果、適切なオンルートスクロール案内機能を実行することができない。従って、自車両が道路地図上の道路から外れた場所に位置する場合には、オンルートスクロール案内機能の実行を見送ることで、不適切なオンルートスクロール案内を実行しないようにすることができるのである。
【0019】
また、請求項9に記載のように、目的地へ向かう経路を検索する経路検索手段を備え、
オンルートスクロール案内手段は、経路検索手段が頻繁に経路を再検索する場合に、オンルートスクロール案内機能の実行を見送るようにするとよい。
【0020】
経路の再検索が頻繁に行われるような場合、ユーザは、目的地へ向かう最終的な経路を決めかねている状況であると考えられる。このような状況でオンルートスクロール案内機能を実行すると、ユーザは、提供される情報を煩わしく感じるからである。
【0021】
請求項10に記載のカーナビゲーション装置によれば、オンルートスクロール案内手段は、仮想自車両が走行する状態を表示する際、仮想自車両の走行開始位置から走行終了位置までの経路の区間の道路形態に応じて、当該仮想自車両が経路に沿って移動する速さを変更することを特徴とする。
【0022】
例えば、自車両が右左折する必要のない道路形態(直線的な形状の道路等)では、ユーザに経路案内情報、道路形態情報、周辺施設情報等を確認させるための時間は短い時間でよい。従って、このような道路形態の場合には、仮想自車両を速く移動させて表示することで、各種の情報を速やかに確認するだけの時間をユーザに与えることができる。
【0023】
また、経路案内を必要とする分岐地点・合流地点・交差点等のように、自車両が右左折する必要のある道路形態(交差点等を拡大表示するような場合)では、ユーザに経路案内情報、道路形態情報、周辺施設情報等を確認させるための時間は、直線的な形状の道路の場合よりも長い時間必要である。従って、このような道路形態の場合には、仮想自車両を遅く移動させて(仮想自車両を一定時間停止させてもよい)表示することで、各種の情報を充分に確認するだけの時間をユーザに与えることができる。
【発明を実施するための最良の形態】
【0024】
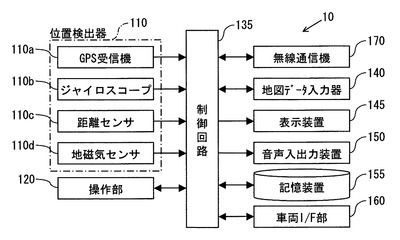
以下、本発明の実施形態について図面を用いて説明する。図1は、本発明の実施形態であるカーナビゲーション装置の全体構成を示すブロック図である。このカーナビゲーション装置10は車両に搭載して使用されるもので、図1に示すように、自車両の現在位置を検出する位置検出器110、ユーザからの各種指示を入力するための操作部120、地図データや各種の情報を記録した外部記録媒体から地図データ等を入力する地図データ入力器140が制御回路135に各々接続されている。
【0025】
また、カーナビゲーション装置10は、道路地図表示画面やTV画面等の各種表示を行うための表示装置145、各種の案内音声等を出力するための音声入出力装置150、各種のデータを記憶するための記憶装置155、自車両の各種情報の授受を行うための車両インターフェース(I/F)部160、ブルートゥース(Bluetooth、登録商標)等の近距離無線通信を行うための無線通信機170が制御回路135に各々接続されて構成される。
【0026】
制御回路135は、位置検出器110、操作部120、地図データ入力器140、記憶装置155、及び車両I/F部160からの入力信号に応じて各種処理を実行し、位置検出器110、操作部120、地図データ入力器140、表示装置145、音声出力装置150、記憶装置155、車両I/F部160、無線通信機170の各々の動作を制御する。
【0027】
位置検出器110は、GPS(Global Positioning System、全地球測位システム)用の人工衛星からの送信電波をGPSアンテナを介して受信し、自車両の位置、方位、速度等を検出するGPS受信機110a、自車両の回転運動の大きさを検出するジャイロスコープ110b、自車両の前後方向の加速度等から走行した距離を検出するための距離センサ110c、地磁気から自車両の進行方位を検出するための地磁気センサ110dとを備えている。そして、これらの各センサ110a〜110dは、各々が性質の異なる誤差を有しているため、互いに補完しながら使用するように構成されている。なお、精度によっては、上述したうちの一部のセンサで構成してもよく、またステアリングの回転センサや各転動輪の車輪センサ等を用いてもよい。
【0028】
地図データ入力器140は、ネットワークデータとしての道路データ、位置特定の精度向上のためのいわゆるマップマッチング用データ等の地図データ、施設を示すマークデータ、案内用の画像や音声データ等を含む各種のデータを入力するための装置である。これらのデータの記録媒体としては、CD−ROM、DVD−ROM、ハードディスク、メモリカード等を用いることができる。
【0029】
表示装置145は、カラー表示装置であり、液晶ディスプレイ、プラズマディスプレイ、CRTなどがあるが、そのいずれを用いてもよい。表示装置145の表示画面には、位置検出器110にて検出した自車両の現在位置と地図データ入力器140より入力された地図データとから特定した現在地を示す自車位置マーク、目的地までの案内経路、名称、目印、各種施設のマーク等の付加データとを重ねて表示することができる。また、施設のガイド情報も表示することができる。音声入出力装置150は、地図データ入力器140より入力した施設のガイド情報や各種案内の音声や、車両I/F部160を介して取得した情報の読み上げ音声を出力することができる。
【0030】
車両I/F部160は、各種の外部情報を入出力するためのインターフェースであり、自車両の車両状態の検出信号や、図示しないラジオアンテナを介して受信したFM放送信号や、道路近傍に配置されたVICS(道路交通情報システム)サービス用の固定局から受信した電波ビーコン信号及び光ビーコン信号等の各種信号を入力する。
【0031】
無線通信機170は、狭域通信を行うためのものであり、例えば、DSRC(Dedicated Short Range Communication)、ブルートゥース、無線LAN(Local Area Network)、UWB(Ultra Wide Band、超広帯域無線)等が使用されている。
【0032】
制御回路135は、何れも周知のCPU、ROM、RAM、I/O及びこれらの構成を接続するバスライン等からなるマイクロコンピュータを中心に構成されており、ROM等に記憶されたプログラムに基づいて、各種制御を実行する。
【0033】
この制御回路135は、位置検出器110からの各検出信号に基づき、座標(緯経度)及び進行方向(真北方向を0度とする方向角)の組として自車両の現在位置を算出する。そして、地図データ入力器140を介して読み込んだ現在位置付近の道路地図や、操作部120の操作によって指示された範囲の道路地図等を表示装置145に表示する道路地図表示機能を実行する。
【0034】
また、制御回路135は、地図データ入力器140に格納された地点データに基づき、操作部120の操作に従って目的地となる施設を選択し、任意の出発地又は現在地から目的地までの最適な経路を自動的に検索する経路計算を行い、検索された目的地へ向かう経路の案内を行う経路案内機能を実行する。
【0035】
また、制御回路135は、道路地図上の経路に沿って仮想自車両が走行する状態を表示し、この仮想自車両の進行に応じて経路の案内を仮想的に行うオンルートスクロール案内機能を実行する。カーナビゲーション装置10のユーザは、この機能を使用して、目的地までの仮想経路案内を実行させることで、これから走行する予定の経路の情報が得られる。
【0036】
このオンルートスクロール案内機能は、経路案内機能によって検索された経路(経路の全区間でもよいし一部の区間でもよい)を含む道路地図を表示し、表示された経路沿って仮想の自車両(仮想自車両)の位置を示す仮想自車位置マークを移動(オンルートスクロール)させ、仮想自車位置マークの進行に応じて仮想的に経路の案内を行うものである。例えば、仮想自車位置マークが経路上の案内ポイント(自車両が右左折する必要のある分岐地点・合流地点・交差点等)に近づいた場合に、その案内ポイントにおける経路案内情報、道路形態情報、周辺施設情報等を表示したり音声出力したりする。
【0037】
ここで、従来のオンルートスクロール案内機能は、ユーザが、これから走行しようとする経路の情報や道路形態を知りたい場合(経路検索した直後だけでなく、自車両が信号で停止している時や渋滞で停止している時も含む)には、その都度、オンルートスクロール案内機能を選択して、スクロール開始/停止ボタンを押下したり、車両走行開始時に「現在地ボタン」を押下することが必要であった。そのため、ユーザにとっては、これから走行しようとする経路の経路情報や道路形態を知るための操作が面倒であった。
【0038】
そこで、本実施形態のカーナビゲーション装置10は、経路案内機能の実行中に自車両が停止した場合にオンルートスクロール案内機能の実行を開始するようにした。これにより、経路案内を行っている時に自車両が交差点等において赤信号で停車した際、オンルートスクロール案内機能の実行を自動的に開始することが可能となるので、オンルートスクロール案内機能の実行を開始するためのユーザによる操作が不要となる。その結果、ユーザは、経路案内中であっても、これから走行しようとする経路の情報や道路形態を知ることができるようになるのである。
【0039】
次に、カーナビゲーション装置10によるオンルートスクロール案内機能の動作について、図3に示すフローチャートを用いて説明する。なお、このオンルートスクロール案内機能が実行される前に、予め目的地へ向かう経路が検索されており、その検索された経路の経路案内が実行中であり、さらに、オンルートスクロール案内機能の実行を自動的に開始するための自動開始設定がON(自動開始)に設定されているものとする。また、この自動開始設定は、ユーザの操作によって設定変更することができるものである。
【0040】
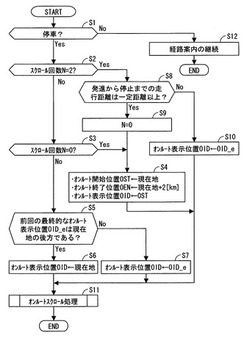
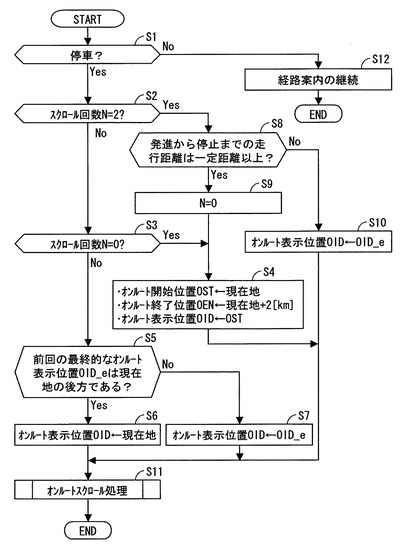
先ず、図3に示すステップS1は、経路案内機能による経路案内の実行中に自車両が停止したかどうか判断する。このステップS1にて肯定判断した場合にはステップS2へ処理を進め、否定判断した場合にはステップS12にて、経路案内を継続するとしてオンルートスクロール案内機能を終了する。
【0041】
ステップS2では、後述するオンルートスクロール処理の実行回数(以下、スクロール回数)Nが2回であるかどうかを判断する。このステップS2にて肯定判断した場合にはステップS8へ処理を進め、否定判断した場合にはステップS3へ処理を移行する。ステップS3では、スクロール回数が0回であるかどうかを判断する。このステップS3にて肯定判断した場合にはステップS4へ処理を進め、否定判断した場合にはステップS5へ処理を進める。
【0042】
ステップS4では、仮想自車両の走行開始位置である、仮想自車位置マークの移動を開始する道路地図上の位置(以下、オンルート開始位置OST)を自車両の現在地、すなわち、自車両の停止した位置に対応する道路地図上の位置に設定する。また、仮想自車両の走行終了位置である、仮想自車位置マークの移動を終了する道路地図上の位置(以下、オンルート終了位置OEN)をオンルート開始位置OSTから経路に沿った所定距離前方(例えば、2[km]前方)の位置に設定する。これにより、仮想自車両の走行開始位置から所定距離前方の走行終了位置までの経路の区間におけるオンルートスクロール処理を実行することができる。なお、この所定距離は、表示装置145に表示されている道路地図上の経路の最遠点までの距離としても良い。
【0043】
また、ステップS4では、スクロール回数N=0であるため、仮想自車位置マークの表示位置(以下、オンルート表示位置OID)をオンルート開始位置OSTと同じ位置に設定する。このように、オンルート開始位置OST、オンルート終了位置OEN、及びオンルート表示位置OIDの各々の初期設定した後、ステップS11へ処理を移行する。
【0044】
ステップS5では、前回オンルートスクロール処理を実行して終了したときの仮想自車位置マークの位置(前回の最終的なオンルート表示位置OID_e)が自車両の現在地(自車両の停止した位置)に対応する道路地図上の位置よりも経路の進行方向に後方にあるかどうかを判断する。
【0045】
このステップS5にて肯定判断した場合には、ステップS6にて自車両の現在地を今回のオンルート表示位置OIDに設定する。これは、自車両が停止した位置から経路の後方の情報はその多くがユーザにとって不要な情報となるため、ユーザに提供すべき情報を自車両の現在地より前方の情報に絞り込むためにである。一方、ステップS5にて否定判断した場合には、ステップS7にて前回の最終的なオンルート表示位置OID_eを今回のオンルート表示位置OIDに設定する。ステップS6又はステップS7にてオンルート表示位置OIDの設定がなされると、ステップS11へ処理を移行する。
【0046】
ステップS8では、自車両が前回の停止から発進し、今回停止するまでの走行距離が一定距離(例えば、500[m])以上であるかどうかを判断する。このステップS8にて肯定判断した場合には、ステップS9にてスクロール回数を初期化(0)に設定した後、ステップS4へ処理を進める。一方、このステップS8にて否定判断した場合には、ステップS10では、ステップS7と同様に、前回の最終的なオンルート表示位置OID_eを今回のオンルート表示位置OIDに設定する。
【0047】
このステップS8は、自車両が発進と停止を頻繁に繰り返しているかどうかを判断している。すなわち、例えば、渋滞区間等では発進と停止を頻繁に繰り返すことになるが、このような場合に自車両が停止する度にオンルートスクロール案内機能を実行させると、提供済みの情報を過度に重複して提供するようになる。そこで、自車両が発進と停止を頻繁に繰り返す場合(例えば、自車両が発進して停止するまでの経過時間/走行距離が一定時間(例えば、30秒/一定距離(例えば、500[m]に満たない場合)には、ステップS10にて、オンルート表示位置OID_eをオンルート表示位置OIDとして設定する。これにより、提供済みの情報を過度に重複して提供することがなくなる。
【0048】
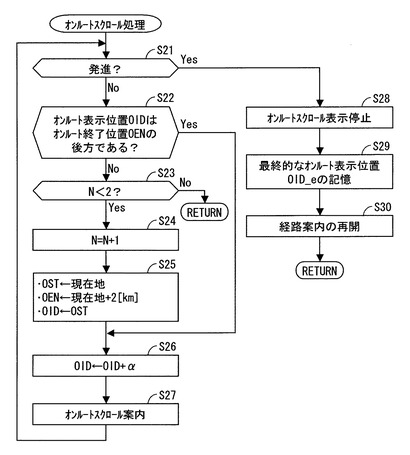
ステップS11におけるオンルートスクロール処理について、図4に示すフローチャートを用いて説明する。ステップS21では、停止中の自車両が発進を開始したかどうかを判断する。このステップS21にて肯定判断した場合には、ステップS28以降の処理を行う。すなわち、ステップS28にてオンルートスクロール表示を停止し、ステップS29にて最終的なオンルート表示位置OID_eを記憶し、ステップS30にて経路案内を再開させて、本処理を終了する。このようにオンルートスクロール処理は、自車両が停止した後に走行開始(発進)すると、オンルートスクロール表示を中止して、経路案内を再開する。一方、ステップS21にて否定判断した場合には、ステップS22へ処理を進める。
【0049】
ステップS22では、オンルート表示位置OIDはオンルート終了位置OENに対し、経路進行方向の後方に位置するかどうかを判断する。このステップS22で肯定判断した場合にはステップS26へ処理を移行し、否定判断した場合にはステップS23に処理を進める。
【0050】
ステップS23では、スクロール回数Nが2回未満(0又は1回)であるかどうかを判断する。このステップS23にて肯定判断した場合には、ステップS24に処理を進めてオンルートスクロール案内が行われる。一方、ステップS23にて肯定判断した場合には、本処理を終了する。
【0051】
これにより、オンルートスクロール案内が2回繰り返されるようになるため、経路上の同じ区間のオンルートスクロール案内を開始するためのユーザによる操作が不要となるとともに、経路案内情報、道路形態情報、及び周辺施設情報等の各種情報を繰り返し確認することができるようになる。また、オンルートスクロール案内が2回繰り返された場合には、その後、その経路上の区間と同一の区間におけるオンルートスクロール案内の実行が見送られるようになるため、ユーザが確認した各種情報を過度に重複して提供しないようにすることができる。
【0052】
ステップS24では、スクロール回数Nに1を加え、ステップS25では、ステップS4と同様の処理を行う。これは、仮想自車位置マークをオンルート開始位置OSTの位置から移動させるためである。
【0053】
ステップS26では、オンルート表示位置OIDに所定距離αを加えて、オンルート表示位置OIDを更新する。この所定距離αについては、オンルート開始位置OSTからオンルート終了位置OEN(オンルート表示位置OIDからオンルート終了位置OENでもよい)までの経路の区間の道路形態に応じて、その長さを変更するようにしてもよい。これは、本オンルートスクロール処理が繰り返し実行されることで、道路形態に応じて仮想自車位置マークが経路に沿って移動する速さを変更するためである。
【0054】
例えば、自車両が右左折する必要のない道路形態(直線的な形状の道路等)では、ユーザに経路案内情報、道路形態情報、周辺施設情報等を確認させるための時間は短い時間でよい。従って、このような道路形態の場合には、仮想自車位置マークを速く移動させて表示することで、各種の情報を速やかに確認するだけの時間をユーザに与えることができる。
【0055】
また、経路案内を必要とする分岐地点・合流地点・交差点等のように、自車両が右左折する必要のある道路形態(交差点等を拡大表示するような場合)では、ユーザに経路案内情報、道路形態情報、周辺施設情報等を確認させるための時間は、直線的な形状の道路の場合よりも長い時間必要である。従って、このような道路形態の場合には、仮想自車位置マークを遅く移動させて(仮想自車位置マークを一定時間停止させてもよい)表示することで、各種の情報を充分に確認するだけの時間をユーザに与えることができる。
【0056】
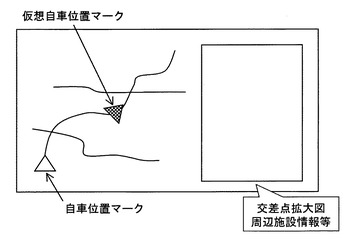
ステップS27では、ステップS26にて更新されたオンルート表示位置OIDにおける経路案内情報、道路形態情報、周辺施設情報等をユーザに案内するためのオンルートスクロール案内を行う。図2に示すように、オンルートスクロール案内では、道路地図上に描画された自車位置マークは表示したまま、その自車位置マークとは異なる表示態様(例えば、自車位置マークよりは薄い表示や色を変更した表示)で仮想自車位置マークを道路地図上に表示する。そして、仮想自車位置マークのみが経路上を移動(オンルートスクロール)する表示を行うとともに、この仮想自車位置マークの道路地図上の描画位置に応じた経路案内情報、道路形態情報、周辺施設情報等の各種情報を並べて表示する。これにより、ユーザは、道路地図上の経路に沿って進行する仮想自車位置マークの位置とともに、その位置における上記の各種情報を同時に把握することが可能になる。なお、仮想自車位置マークの移動に伴って仮想的な音声案内を行ってもよい。
【0057】
このように、本実施形態のカーナビゲーション装置10は、経路案内機能の実行中に自車両が停止した場合にオンルートスクロール案内機能の実行を開始するため、オンルートスクロール案内機能の実行を開始するためのユーザによる操作が不要となる。
【0058】
以上、本発明の好ましい実施形態について説明したが、本発明は上述した実施形態に何ら制限されることなく、本発明の主旨を逸脱しない範囲において、種々変形して実施することができる。
【0059】
(変形例1)
例えば、自車両が道路地図上の道路から外れた場所に位置する場合には、オンルートスクロール案内機能の実行を見送るようにしてもよい。これは、道路地図を表示するために用いられる地図データが新たに設置された道路のデータを含んでいない場合、その道路を自車両が走行すると、道路地図上では道路から外れた場所に位置するようになり、その結果、適切なオンルートスクロール案内機能を実行することができないからである。
【0060】
従って、自車両が道路地図上の道路から外れた場所に位置する場合には、オンルートスクロール案内機能の実行を見送ることで、不適切なオンルートスクロール案内を実行しないようにすることができるようになる。
【0061】
(変形例2)
経路を頻繁に再検索する場合には、オンルートスクロール案内機能の実行を見送るようにするとよい。経路の再検索が頻繁に行われるような場合、ユーザは、目的地へ向かう最終的な経路を決めかねている状況であると考えられる。このような状況でオンルートスクロール案内機能を実行すると、ユーザは、提供される情報を煩わしく感じるからである。
【0062】
(変形例3)
本実施形態のオンルートスクロール案内機能は、表示装置145に道路地図が表示されている場合にのみ実行するようにし、TV画像や前方ステレオ画像が表示されている場合には実行しないようにしてもよい。
【0063】
(変形例4)
本実施形態のオンルートスクロール案内機能は、自車両のシフトレンジが「Dレンジ」である場合にのみ実行するようにしても良い。また、経路に高速道路が含まれている場合には、自車両がその高速道路を走行する場合に限り、オンルートスクロール案内機能の実行を見送るようにしてもよい。
【図面の簡単な説明】
【0064】
【図1】カーナビゲーション装置10の全体構成を示すブロック図である。
【図2】オンルートスクロール表示の一例を示す図である。
【図3】オンルートスクロール案内機能の動作を説明するためのフローチャートである。
【図4】オンルートスクロール案内機能におけるオンルートスクロール処理を説明するためのフローチャートである。
【符号の説明】
【0065】
10 カーナビゲーション装置
110 位置検出器
110a GPS受信機
110b ジャイロスコープ
110c 距離センサ
110d 地磁気センサ
120 操作部
135 制御回路
140 地図データ入力器
145 表示装置
150 音声入出力装置
155 記憶装置
160 車両I/F部
170 無線通信機
【技術分野】
【0001】
本発明は、カーナビゲーション装置に関するものである。
【背景技術】
【0002】
従来、目的地までの道路地図上の経路に沿って仮想自車両が走行する状態を表示し、この仮想車両の進行に応じて経路の案内を仮想的に行うオンルートスクロール案内機能を備えた装置がある(例えば、特許文献1及び特許文献2参照。)。カーナビゲーション装置のユーザは、このオンルートスクロール案内機能を使用して、目的地までの仮想経路案内を実行させることで、これから走行する予定の経路の情報が得られる。
【特許文献1】特開2003−21529号公報
【特許文献2】特開2004−361238号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記特許文献1に記載のものは、経路の出発地を出発する前にオンルートスクロール表示するものであるため、出発地を出発した後に再びオンルートスクロール表示させようとする場合、ユーザ自身がオンルートスクロール案内機能の実行を開始するための操作を要する。また、上記特許文献2のものは、出発前に全経路をオンルートスクロール(案内シミュレーション)するものであり、経路の出発地を出発した後にシミュレーションを行うものではない。
【0004】
このように、従来のオンルートスクロール案内機能は、ユーザが、これから走行しようとする経路の情報や道路形態を知りたい場合(経路探索した直後だけでなく、自車両が信号で停止している時や渋滞で停止している時も含む)には、その都度、オンルートスクロール案内機能を選択して、スクロール開始/停止ボタンを押下したり、車両走行開始時に「現在地ボタン」を押下することが必要である。そのため、ユーザにとっては、これから走行しようとする経路の経路情報や道路形態を知るための操作が面倒である問題があった。
【0005】
本発明は、上記の問題を鑑みてなされたもので、ユーザによる操作を必要とすることなくオンルートスクロール案内機能を実行することができるカーナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項1記載のカーナビゲーション装置は、
目的地へ向かう経路の案内を行う経路案内手段と、
道路地図上の経路に沿って仮想自車両が走行する状態を表示し、当該仮想自車両の進行に応じて経路の案内を仮想的に行うオンルートスクロール案内機能を実行するオンルートスクロール案内手段と、を備えるものであって、
オンルートスクロール案内手段は、経路案内手段による経路案内の実行中に自車両が停止した場合に、オンルートスクロール案内機能の実行を開始するものである。
【0007】
これにより、自車両に搭載されたカーナビゲーション装置で経路案内を行っている時に自車両が交差点等において赤信号で停車した際、オンルートスクロール案内機能の実行を自動的に開始することが可能となるので、オンルートスクロール案内機能の実行を開始するためのユーザによる操作が不要となる。その結果、ユーザは、経路案内中であっても、これから走行しようとする経路の情報や道路形態を知ることができるようになるのである。
【0008】
請求項2に記載のように、オンルートスクロール案内手段は、道路地図上の経路に沿って仮想自車両が走行する状態と、その仮想自車両の位置に対応する経路案内情報、道路形態情報、及び周辺施設情報の少なくとも1つの情報と、を並べて表示することが好ましい。これにより、ユーザは、道路地図上の経路に沿って進行する仮想自車両の位置とともに、その位置における上記の各種情報を同時に把握することが可能になるからである。
【0009】
請求項3に記載のカーナビゲーション装置によれば、オンルートスクロール案内手段は、自車両の停止した位置に対応する道路地図上の位置を仮想自車両の走行開始位置として設定するとともに、その設定した仮想自車両の走行開始位置から経路に沿った所定距離前方の位置を仮想自車両の走行終了位置として設定する走行開始終了位置設定手段を備えることを特徴とする。
【0010】
これにより、仮想自車両の走行開始位置から所定距離前方の走行終了位置までの経路の区間におけるオンルートスクロール案内機能を実行することができる。
【0011】
なお、請求項4に記載のように、オンルートスクロール案内手段は、仮想自車両の走行開始位置から走行終了位置までの経路の区間におけるオンルートスクロール案内機能の実行を所定回数繰り返すようにすることで、同じ区間のオンルートスクロール案内機能の実行を開始するためのユーザによる操作が不要となるとともに、上記の各種情報を繰り返し確認することができるようになる。
【0012】
また、請求項5に記載のように、オンルートスクロール案内手段は、仮想自車両の走行開始位置から走行終了位置までの経路の区間におけるオンルートスクロール案内機能の実行を所定回数繰り返した場合には、その後、その区間と同一の区間におけるオンルートスクロール案内機能の実行を見送るようにしてもよい。ユーザが確認した情報を過度に重複して提供しないようにするためである。
【0013】
請求項6に記載のカーナビゲーション装置によれば、走行開始終了位置設定手段は、自車両が発進と停止を頻繁に繰り返す場合には、前回オンルートスクロール案内機能を実行して終了したときの仮想自車両の位置を、今回オンルートスクロール案内機能を実行する際の仮想自車両の走行開始位置として設定することを特徴とする。
【0014】
例えば、渋滞区間等では発進と停止を頻繁に繰り返すことになるが、このような場合に自車両が停止する度にオンルートスクロール案内機能を実行させると、提供済みの情報を過度に重複して提供するようになる。
【0015】
そこで、走行開始終了位置設定手段は、自車両が発進と停止を頻繁に繰り返す場合(例えば、自車両が発進して停止するまでの経過時間/走行距離が一定時間/一定距離に満たない場合)には、前回オンルートスクロール案内機能を実行して終了したときの仮想自車両の位置を、今回オンルートスクロール案内機能を実行する際の仮想自車両の走行開始位置として設定する。これにより、提供済みの情報を過度に重複して提供することがなくなる。
【0016】
また、請求項7に記載のように、走行開始終了位置設定手段は、前回オンルートスクロール案内機能を実行して終了したときの仮想自車両の位置が、自車両が停止した位置に対応する道路地図上の位置よりも経路の進行方向に対し後方である場合には、自車両が停止した位置に対応する道路地図上の位置を仮想自車両の走行開始位置として設定することが好ましい。自車両が停止した位置から経路の後方の情報は、その多くがユーザにとって不要な情報となるからである。
【0017】
請求項8に記載のカーナビゲーション装置によれば、オンルートスクロール案内手段は、自車両が道路地図上の道路から外れた場所に位置する場合に、オンルートスクロール案内機能の実行を見送ること特徴とする。
【0018】
例えば、道路地図を表示するために用いられる地図データが新たに設置された道路のデータを含んでいない場合、その道路を自車両が走行すると、道路地図上では道路から外れた場所に位置するようになり、その結果、適切なオンルートスクロール案内機能を実行することができない。従って、自車両が道路地図上の道路から外れた場所に位置する場合には、オンルートスクロール案内機能の実行を見送ることで、不適切なオンルートスクロール案内を実行しないようにすることができるのである。
【0019】
また、請求項9に記載のように、目的地へ向かう経路を検索する経路検索手段を備え、
オンルートスクロール案内手段は、経路検索手段が頻繁に経路を再検索する場合に、オンルートスクロール案内機能の実行を見送るようにするとよい。
【0020】
経路の再検索が頻繁に行われるような場合、ユーザは、目的地へ向かう最終的な経路を決めかねている状況であると考えられる。このような状況でオンルートスクロール案内機能を実行すると、ユーザは、提供される情報を煩わしく感じるからである。
【0021】
請求項10に記載のカーナビゲーション装置によれば、オンルートスクロール案内手段は、仮想自車両が走行する状態を表示する際、仮想自車両の走行開始位置から走行終了位置までの経路の区間の道路形態に応じて、当該仮想自車両が経路に沿って移動する速さを変更することを特徴とする。
【0022】
例えば、自車両が右左折する必要のない道路形態(直線的な形状の道路等)では、ユーザに経路案内情報、道路形態情報、周辺施設情報等を確認させるための時間は短い時間でよい。従って、このような道路形態の場合には、仮想自車両を速く移動させて表示することで、各種の情報を速やかに確認するだけの時間をユーザに与えることができる。
【0023】
また、経路案内を必要とする分岐地点・合流地点・交差点等のように、自車両が右左折する必要のある道路形態(交差点等を拡大表示するような場合)では、ユーザに経路案内情報、道路形態情報、周辺施設情報等を確認させるための時間は、直線的な形状の道路の場合よりも長い時間必要である。従って、このような道路形態の場合には、仮想自車両を遅く移動させて(仮想自車両を一定時間停止させてもよい)表示することで、各種の情報を充分に確認するだけの時間をユーザに与えることができる。
【発明を実施するための最良の形態】
【0024】
以下、本発明の実施形態について図面を用いて説明する。図1は、本発明の実施形態であるカーナビゲーション装置の全体構成を示すブロック図である。このカーナビゲーション装置10は車両に搭載して使用されるもので、図1に示すように、自車両の現在位置を検出する位置検出器110、ユーザからの各種指示を入力するための操作部120、地図データや各種の情報を記録した外部記録媒体から地図データ等を入力する地図データ入力器140が制御回路135に各々接続されている。
【0025】
また、カーナビゲーション装置10は、道路地図表示画面やTV画面等の各種表示を行うための表示装置145、各種の案内音声等を出力するための音声入出力装置150、各種のデータを記憶するための記憶装置155、自車両の各種情報の授受を行うための車両インターフェース(I/F)部160、ブルートゥース(Bluetooth、登録商標)等の近距離無線通信を行うための無線通信機170が制御回路135に各々接続されて構成される。
【0026】
制御回路135は、位置検出器110、操作部120、地図データ入力器140、記憶装置155、及び車両I/F部160からの入力信号に応じて各種処理を実行し、位置検出器110、操作部120、地図データ入力器140、表示装置145、音声出力装置150、記憶装置155、車両I/F部160、無線通信機170の各々の動作を制御する。
【0027】
位置検出器110は、GPS(Global Positioning System、全地球測位システム)用の人工衛星からの送信電波をGPSアンテナを介して受信し、自車両の位置、方位、速度等を検出するGPS受信機110a、自車両の回転運動の大きさを検出するジャイロスコープ110b、自車両の前後方向の加速度等から走行した距離を検出するための距離センサ110c、地磁気から自車両の進行方位を検出するための地磁気センサ110dとを備えている。そして、これらの各センサ110a〜110dは、各々が性質の異なる誤差を有しているため、互いに補完しながら使用するように構成されている。なお、精度によっては、上述したうちの一部のセンサで構成してもよく、またステアリングの回転センサや各転動輪の車輪センサ等を用いてもよい。
【0028】
地図データ入力器140は、ネットワークデータとしての道路データ、位置特定の精度向上のためのいわゆるマップマッチング用データ等の地図データ、施設を示すマークデータ、案内用の画像や音声データ等を含む各種のデータを入力するための装置である。これらのデータの記録媒体としては、CD−ROM、DVD−ROM、ハードディスク、メモリカード等を用いることができる。
【0029】
表示装置145は、カラー表示装置であり、液晶ディスプレイ、プラズマディスプレイ、CRTなどがあるが、そのいずれを用いてもよい。表示装置145の表示画面には、位置検出器110にて検出した自車両の現在位置と地図データ入力器140より入力された地図データとから特定した現在地を示す自車位置マーク、目的地までの案内経路、名称、目印、各種施設のマーク等の付加データとを重ねて表示することができる。また、施設のガイド情報も表示することができる。音声入出力装置150は、地図データ入力器140より入力した施設のガイド情報や各種案内の音声や、車両I/F部160を介して取得した情報の読み上げ音声を出力することができる。
【0030】
車両I/F部160は、各種の外部情報を入出力するためのインターフェースであり、自車両の車両状態の検出信号や、図示しないラジオアンテナを介して受信したFM放送信号や、道路近傍に配置されたVICS(道路交通情報システム)サービス用の固定局から受信した電波ビーコン信号及び光ビーコン信号等の各種信号を入力する。
【0031】
無線通信機170は、狭域通信を行うためのものであり、例えば、DSRC(Dedicated Short Range Communication)、ブルートゥース、無線LAN(Local Area Network)、UWB(Ultra Wide Band、超広帯域無線)等が使用されている。
【0032】
制御回路135は、何れも周知のCPU、ROM、RAM、I/O及びこれらの構成を接続するバスライン等からなるマイクロコンピュータを中心に構成されており、ROM等に記憶されたプログラムに基づいて、各種制御を実行する。
【0033】
この制御回路135は、位置検出器110からの各検出信号に基づき、座標(緯経度)及び進行方向(真北方向を0度とする方向角)の組として自車両の現在位置を算出する。そして、地図データ入力器140を介して読み込んだ現在位置付近の道路地図や、操作部120の操作によって指示された範囲の道路地図等を表示装置145に表示する道路地図表示機能を実行する。
【0034】
また、制御回路135は、地図データ入力器140に格納された地点データに基づき、操作部120の操作に従って目的地となる施設を選択し、任意の出発地又は現在地から目的地までの最適な経路を自動的に検索する経路計算を行い、検索された目的地へ向かう経路の案内を行う経路案内機能を実行する。
【0035】
また、制御回路135は、道路地図上の経路に沿って仮想自車両が走行する状態を表示し、この仮想自車両の進行に応じて経路の案内を仮想的に行うオンルートスクロール案内機能を実行する。カーナビゲーション装置10のユーザは、この機能を使用して、目的地までの仮想経路案内を実行させることで、これから走行する予定の経路の情報が得られる。
【0036】
このオンルートスクロール案内機能は、経路案内機能によって検索された経路(経路の全区間でもよいし一部の区間でもよい)を含む道路地図を表示し、表示された経路沿って仮想の自車両(仮想自車両)の位置を示す仮想自車位置マークを移動(オンルートスクロール)させ、仮想自車位置マークの進行に応じて仮想的に経路の案内を行うものである。例えば、仮想自車位置マークが経路上の案内ポイント(自車両が右左折する必要のある分岐地点・合流地点・交差点等)に近づいた場合に、その案内ポイントにおける経路案内情報、道路形態情報、周辺施設情報等を表示したり音声出力したりする。
【0037】
ここで、従来のオンルートスクロール案内機能は、ユーザが、これから走行しようとする経路の情報や道路形態を知りたい場合(経路検索した直後だけでなく、自車両が信号で停止している時や渋滞で停止している時も含む)には、その都度、オンルートスクロール案内機能を選択して、スクロール開始/停止ボタンを押下したり、車両走行開始時に「現在地ボタン」を押下することが必要であった。そのため、ユーザにとっては、これから走行しようとする経路の経路情報や道路形態を知るための操作が面倒であった。
【0038】
そこで、本実施形態のカーナビゲーション装置10は、経路案内機能の実行中に自車両が停止した場合にオンルートスクロール案内機能の実行を開始するようにした。これにより、経路案内を行っている時に自車両が交差点等において赤信号で停車した際、オンルートスクロール案内機能の実行を自動的に開始することが可能となるので、オンルートスクロール案内機能の実行を開始するためのユーザによる操作が不要となる。その結果、ユーザは、経路案内中であっても、これから走行しようとする経路の情報や道路形態を知ることができるようになるのである。
【0039】
次に、カーナビゲーション装置10によるオンルートスクロール案内機能の動作について、図3に示すフローチャートを用いて説明する。なお、このオンルートスクロール案内機能が実行される前に、予め目的地へ向かう経路が検索されており、その検索された経路の経路案内が実行中であり、さらに、オンルートスクロール案内機能の実行を自動的に開始するための自動開始設定がON(自動開始)に設定されているものとする。また、この自動開始設定は、ユーザの操作によって設定変更することができるものである。
【0040】
先ず、図3に示すステップS1は、経路案内機能による経路案内の実行中に自車両が停止したかどうか判断する。このステップS1にて肯定判断した場合にはステップS2へ処理を進め、否定判断した場合にはステップS12にて、経路案内を継続するとしてオンルートスクロール案内機能を終了する。
【0041】
ステップS2では、後述するオンルートスクロール処理の実行回数(以下、スクロール回数)Nが2回であるかどうかを判断する。このステップS2にて肯定判断した場合にはステップS8へ処理を進め、否定判断した場合にはステップS3へ処理を移行する。ステップS3では、スクロール回数が0回であるかどうかを判断する。このステップS3にて肯定判断した場合にはステップS4へ処理を進め、否定判断した場合にはステップS5へ処理を進める。
【0042】
ステップS4では、仮想自車両の走行開始位置である、仮想自車位置マークの移動を開始する道路地図上の位置(以下、オンルート開始位置OST)を自車両の現在地、すなわち、自車両の停止した位置に対応する道路地図上の位置に設定する。また、仮想自車両の走行終了位置である、仮想自車位置マークの移動を終了する道路地図上の位置(以下、オンルート終了位置OEN)をオンルート開始位置OSTから経路に沿った所定距離前方(例えば、2[km]前方)の位置に設定する。これにより、仮想自車両の走行開始位置から所定距離前方の走行終了位置までの経路の区間におけるオンルートスクロール処理を実行することができる。なお、この所定距離は、表示装置145に表示されている道路地図上の経路の最遠点までの距離としても良い。
【0043】
また、ステップS4では、スクロール回数N=0であるため、仮想自車位置マークの表示位置(以下、オンルート表示位置OID)をオンルート開始位置OSTと同じ位置に設定する。このように、オンルート開始位置OST、オンルート終了位置OEN、及びオンルート表示位置OIDの各々の初期設定した後、ステップS11へ処理を移行する。
【0044】
ステップS5では、前回オンルートスクロール処理を実行して終了したときの仮想自車位置マークの位置(前回の最終的なオンルート表示位置OID_e)が自車両の現在地(自車両の停止した位置)に対応する道路地図上の位置よりも経路の進行方向に後方にあるかどうかを判断する。
【0045】
このステップS5にて肯定判断した場合には、ステップS6にて自車両の現在地を今回のオンルート表示位置OIDに設定する。これは、自車両が停止した位置から経路の後方の情報はその多くがユーザにとって不要な情報となるため、ユーザに提供すべき情報を自車両の現在地より前方の情報に絞り込むためにである。一方、ステップS5にて否定判断した場合には、ステップS7にて前回の最終的なオンルート表示位置OID_eを今回のオンルート表示位置OIDに設定する。ステップS6又はステップS7にてオンルート表示位置OIDの設定がなされると、ステップS11へ処理を移行する。
【0046】
ステップS8では、自車両が前回の停止から発進し、今回停止するまでの走行距離が一定距離(例えば、500[m])以上であるかどうかを判断する。このステップS8にて肯定判断した場合には、ステップS9にてスクロール回数を初期化(0)に設定した後、ステップS4へ処理を進める。一方、このステップS8にて否定判断した場合には、ステップS10では、ステップS7と同様に、前回の最終的なオンルート表示位置OID_eを今回のオンルート表示位置OIDに設定する。
【0047】
このステップS8は、自車両が発進と停止を頻繁に繰り返しているかどうかを判断している。すなわち、例えば、渋滞区間等では発進と停止を頻繁に繰り返すことになるが、このような場合に自車両が停止する度にオンルートスクロール案内機能を実行させると、提供済みの情報を過度に重複して提供するようになる。そこで、自車両が発進と停止を頻繁に繰り返す場合(例えば、自車両が発進して停止するまでの経過時間/走行距離が一定時間(例えば、30秒/一定距離(例えば、500[m]に満たない場合)には、ステップS10にて、オンルート表示位置OID_eをオンルート表示位置OIDとして設定する。これにより、提供済みの情報を過度に重複して提供することがなくなる。
【0048】
ステップS11におけるオンルートスクロール処理について、図4に示すフローチャートを用いて説明する。ステップS21では、停止中の自車両が発進を開始したかどうかを判断する。このステップS21にて肯定判断した場合には、ステップS28以降の処理を行う。すなわち、ステップS28にてオンルートスクロール表示を停止し、ステップS29にて最終的なオンルート表示位置OID_eを記憶し、ステップS30にて経路案内を再開させて、本処理を終了する。このようにオンルートスクロール処理は、自車両が停止した後に走行開始(発進)すると、オンルートスクロール表示を中止して、経路案内を再開する。一方、ステップS21にて否定判断した場合には、ステップS22へ処理を進める。
【0049】
ステップS22では、オンルート表示位置OIDはオンルート終了位置OENに対し、経路進行方向の後方に位置するかどうかを判断する。このステップS22で肯定判断した場合にはステップS26へ処理を移行し、否定判断した場合にはステップS23に処理を進める。
【0050】
ステップS23では、スクロール回数Nが2回未満(0又は1回)であるかどうかを判断する。このステップS23にて肯定判断した場合には、ステップS24に処理を進めてオンルートスクロール案内が行われる。一方、ステップS23にて肯定判断した場合には、本処理を終了する。
【0051】
これにより、オンルートスクロール案内が2回繰り返されるようになるため、経路上の同じ区間のオンルートスクロール案内を開始するためのユーザによる操作が不要となるとともに、経路案内情報、道路形態情報、及び周辺施設情報等の各種情報を繰り返し確認することができるようになる。また、オンルートスクロール案内が2回繰り返された場合には、その後、その経路上の区間と同一の区間におけるオンルートスクロール案内の実行が見送られるようになるため、ユーザが確認した各種情報を過度に重複して提供しないようにすることができる。
【0052】
ステップS24では、スクロール回数Nに1を加え、ステップS25では、ステップS4と同様の処理を行う。これは、仮想自車位置マークをオンルート開始位置OSTの位置から移動させるためである。
【0053】
ステップS26では、オンルート表示位置OIDに所定距離αを加えて、オンルート表示位置OIDを更新する。この所定距離αについては、オンルート開始位置OSTからオンルート終了位置OEN(オンルート表示位置OIDからオンルート終了位置OENでもよい)までの経路の区間の道路形態に応じて、その長さを変更するようにしてもよい。これは、本オンルートスクロール処理が繰り返し実行されることで、道路形態に応じて仮想自車位置マークが経路に沿って移動する速さを変更するためである。
【0054】
例えば、自車両が右左折する必要のない道路形態(直線的な形状の道路等)では、ユーザに経路案内情報、道路形態情報、周辺施設情報等を確認させるための時間は短い時間でよい。従って、このような道路形態の場合には、仮想自車位置マークを速く移動させて表示することで、各種の情報を速やかに確認するだけの時間をユーザに与えることができる。
【0055】
また、経路案内を必要とする分岐地点・合流地点・交差点等のように、自車両が右左折する必要のある道路形態(交差点等を拡大表示するような場合)では、ユーザに経路案内情報、道路形態情報、周辺施設情報等を確認させるための時間は、直線的な形状の道路の場合よりも長い時間必要である。従って、このような道路形態の場合には、仮想自車位置マークを遅く移動させて(仮想自車位置マークを一定時間停止させてもよい)表示することで、各種の情報を充分に確認するだけの時間をユーザに与えることができる。
【0056】
ステップS27では、ステップS26にて更新されたオンルート表示位置OIDにおける経路案内情報、道路形態情報、周辺施設情報等をユーザに案内するためのオンルートスクロール案内を行う。図2に示すように、オンルートスクロール案内では、道路地図上に描画された自車位置マークは表示したまま、その自車位置マークとは異なる表示態様(例えば、自車位置マークよりは薄い表示や色を変更した表示)で仮想自車位置マークを道路地図上に表示する。そして、仮想自車位置マークのみが経路上を移動(オンルートスクロール)する表示を行うとともに、この仮想自車位置マークの道路地図上の描画位置に応じた経路案内情報、道路形態情報、周辺施設情報等の各種情報を並べて表示する。これにより、ユーザは、道路地図上の経路に沿って進行する仮想自車位置マークの位置とともに、その位置における上記の各種情報を同時に把握することが可能になる。なお、仮想自車位置マークの移動に伴って仮想的な音声案内を行ってもよい。
【0057】
このように、本実施形態のカーナビゲーション装置10は、経路案内機能の実行中に自車両が停止した場合にオンルートスクロール案内機能の実行を開始するため、オンルートスクロール案内機能の実行を開始するためのユーザによる操作が不要となる。
【0058】
以上、本発明の好ましい実施形態について説明したが、本発明は上述した実施形態に何ら制限されることなく、本発明の主旨を逸脱しない範囲において、種々変形して実施することができる。
【0059】
(変形例1)
例えば、自車両が道路地図上の道路から外れた場所に位置する場合には、オンルートスクロール案内機能の実行を見送るようにしてもよい。これは、道路地図を表示するために用いられる地図データが新たに設置された道路のデータを含んでいない場合、その道路を自車両が走行すると、道路地図上では道路から外れた場所に位置するようになり、その結果、適切なオンルートスクロール案内機能を実行することができないからである。
【0060】
従って、自車両が道路地図上の道路から外れた場所に位置する場合には、オンルートスクロール案内機能の実行を見送ることで、不適切なオンルートスクロール案内を実行しないようにすることができるようになる。
【0061】
(変形例2)
経路を頻繁に再検索する場合には、オンルートスクロール案内機能の実行を見送るようにするとよい。経路の再検索が頻繁に行われるような場合、ユーザは、目的地へ向かう最終的な経路を決めかねている状況であると考えられる。このような状況でオンルートスクロール案内機能を実行すると、ユーザは、提供される情報を煩わしく感じるからである。
【0062】
(変形例3)
本実施形態のオンルートスクロール案内機能は、表示装置145に道路地図が表示されている場合にのみ実行するようにし、TV画像や前方ステレオ画像が表示されている場合には実行しないようにしてもよい。
【0063】
(変形例4)
本実施形態のオンルートスクロール案内機能は、自車両のシフトレンジが「Dレンジ」である場合にのみ実行するようにしても良い。また、経路に高速道路が含まれている場合には、自車両がその高速道路を走行する場合に限り、オンルートスクロール案内機能の実行を見送るようにしてもよい。
【図面の簡単な説明】
【0064】
【図1】カーナビゲーション装置10の全体構成を示すブロック図である。
【図2】オンルートスクロール表示の一例を示す図である。
【図3】オンルートスクロール案内機能の動作を説明するためのフローチャートである。
【図4】オンルートスクロール案内機能におけるオンルートスクロール処理を説明するためのフローチャートである。
【符号の説明】
【0065】
10 カーナビゲーション装置
110 位置検出器
110a GPS受信機
110b ジャイロスコープ
110c 距離センサ
110d 地磁気センサ
120 操作部
135 制御回路
140 地図データ入力器
145 表示装置
150 音声入出力装置
155 記憶装置
160 車両I/F部
170 無線通信機
【特許請求の範囲】
【請求項1】
目的地へ向かう経路の案内を行う経路案内手段と、
道路地図上の前記経路に沿って仮想自車両が走行する状態を表示し、当該仮想自車両の進行に応じて前記経路の案内を仮想的に行うオンルートスクロール案内機能を実行するオンルートスクロール案内手段と、を備えるカーナビゲーション装置であって、
前記オンルートスクロール案内手段は、前記経路案内手段による経路案内の実行中に自車両が停止した場合に、前記オンルートスクロール案内機能の実行を開始することを特徴とするカーナビゲーション装置。
【請求項2】
前記オンルートスクロール案内手段は、道路地図上の経路に沿って仮想自車両が走行する状態と、その仮想自車両の位置に対応する経路案内情報、道路形態情報、及び周辺施設情報の少なくとも1つの情報と、を並べて表示することを特徴とする請求項1記載のカーナビゲーション装置。
【請求項3】
前記オンルートスクロール案内手段は、前記自車両の停止した位置に対応する道路地図上の位置を仮想自車両の走行開始位置として設定するとともに、その設定した仮想自車両の走行開始位置から経路に沿った所定距離前方の位置を仮想自車両の走行終了位置として設定する走行開始終了位置設定手段を備えることを特徴とする請求項1又は2記載のカーナビゲーション装置。
【請求項4】
前記オンルートスクロール案内手段は、前記仮想自車両の走行開始位置から走行終了位置までの経路の区間におけるオンルートスクロール案内機能の実行を所定回数繰り返すことを特徴とする請求項3記載のカーナビゲーション装置。
【請求項5】
前記オンルートスクロール案内手段は、前記仮想自車両の走行開始位置から走行終了位置までの経路の区間におけるオンルートスクロール案内機能の実行を所定回数繰り返した場合には、その後の前記区間と同一の区間におけるオンルートスクロール案内機能の実行を見送ることを特徴とする請求項4記載のカーナビゲーション装置。
【請求項6】
前記走行開始終了位置設定手段は、前記自車両が発進と停止を頻繁に繰り返す場合には、前回オンルートスクロール案内機能を実行して終了したときの仮想自車両の位置を、今回オンルートスクロール案内機能を実行する際の仮想自車両の走行開始位置として設定することを特徴とする請求項2〜5の何れか1項に記載のカーナビゲーション装置。
【請求項7】
前記走行開始終了位置設定手段は、前回オンルートスクロール案内機能を実行して終了したときの仮想自車両の位置が、前記自車両が停止した位置に対応する道路地図上の位置よりも経路の進行方向に対し後方である場合には、前記自車両が停止した位置に対応する道路地図上の位置を仮想自車両の走行開始位置として設定することを特徴とする請求項6記載のカーナビゲーション装置。
【請求項8】
前記オンルートスクロール案内手段は、前記自車両が道路地図上の道路から外れた場所に位置する場合に、オンルートスクロール案内機能の実行を見送ること特徴とする請求項1〜7の何れか1項に記載のカーナビゲーション装置。
【請求項9】
目的地へ向かう経路を検索する経路検索手段を備え、
前記オンルートスクロール案内手段は、前記経路検索手段が頻繁に経路を再検索する場合に、オンルートスクロール案内機能の実行を見送ることを特徴とする請求項1〜8の何れか1項に記載のカーナビゲーション装置。
【請求項10】
前記オンルートスクロール案内手段は、前記仮想自車両が走行する状態を表示する際、前記仮想自車両の走行開始位置から走行終了位置までの経路の区間の道路形態に応じて、当該仮想自車両が経路に沿って移動する速さを変更することを特徴とする請求項1〜9の何れか1項に記載のカーナビゲーション装置。
【請求項1】
目的地へ向かう経路の案内を行う経路案内手段と、
道路地図上の前記経路に沿って仮想自車両が走行する状態を表示し、当該仮想自車両の進行に応じて前記経路の案内を仮想的に行うオンルートスクロール案内機能を実行するオンルートスクロール案内手段と、を備えるカーナビゲーション装置であって、
前記オンルートスクロール案内手段は、前記経路案内手段による経路案内の実行中に自車両が停止した場合に、前記オンルートスクロール案内機能の実行を開始することを特徴とするカーナビゲーション装置。
【請求項2】
前記オンルートスクロール案内手段は、道路地図上の経路に沿って仮想自車両が走行する状態と、その仮想自車両の位置に対応する経路案内情報、道路形態情報、及び周辺施設情報の少なくとも1つの情報と、を並べて表示することを特徴とする請求項1記載のカーナビゲーション装置。
【請求項3】
前記オンルートスクロール案内手段は、前記自車両の停止した位置に対応する道路地図上の位置を仮想自車両の走行開始位置として設定するとともに、その設定した仮想自車両の走行開始位置から経路に沿った所定距離前方の位置を仮想自車両の走行終了位置として設定する走行開始終了位置設定手段を備えることを特徴とする請求項1又は2記載のカーナビゲーション装置。
【請求項4】
前記オンルートスクロール案内手段は、前記仮想自車両の走行開始位置から走行終了位置までの経路の区間におけるオンルートスクロール案内機能の実行を所定回数繰り返すことを特徴とする請求項3記載のカーナビゲーション装置。
【請求項5】
前記オンルートスクロール案内手段は、前記仮想自車両の走行開始位置から走行終了位置までの経路の区間におけるオンルートスクロール案内機能の実行を所定回数繰り返した場合には、その後の前記区間と同一の区間におけるオンルートスクロール案内機能の実行を見送ることを特徴とする請求項4記載のカーナビゲーション装置。
【請求項6】
前記走行開始終了位置設定手段は、前記自車両が発進と停止を頻繁に繰り返す場合には、前回オンルートスクロール案内機能を実行して終了したときの仮想自車両の位置を、今回オンルートスクロール案内機能を実行する際の仮想自車両の走行開始位置として設定することを特徴とする請求項2〜5の何れか1項に記載のカーナビゲーション装置。
【請求項7】
前記走行開始終了位置設定手段は、前回オンルートスクロール案内機能を実行して終了したときの仮想自車両の位置が、前記自車両が停止した位置に対応する道路地図上の位置よりも経路の進行方向に対し後方である場合には、前記自車両が停止した位置に対応する道路地図上の位置を仮想自車両の走行開始位置として設定することを特徴とする請求項6記載のカーナビゲーション装置。
【請求項8】
前記オンルートスクロール案内手段は、前記自車両が道路地図上の道路から外れた場所に位置する場合に、オンルートスクロール案内機能の実行を見送ること特徴とする請求項1〜7の何れか1項に記載のカーナビゲーション装置。
【請求項9】
目的地へ向かう経路を検索する経路検索手段を備え、
前記オンルートスクロール案内手段は、前記経路検索手段が頻繁に経路を再検索する場合に、オンルートスクロール案内機能の実行を見送ることを特徴とする請求項1〜8の何れか1項に記載のカーナビゲーション装置。
【請求項10】
前記オンルートスクロール案内手段は、前記仮想自車両が走行する状態を表示する際、前記仮想自車両の走行開始位置から走行終了位置までの経路の区間の道路形態に応じて、当該仮想自車両が経路に沿って移動する速さを変更することを特徴とする請求項1〜9の何れか1項に記載のカーナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2008−64614(P2008−64614A)
【公開日】平成20年3月21日(2008.3.21)
【国際特許分類】
【出願番号】特願2006−243029(P2006−243029)
【出願日】平成18年9月7日(2006.9.7)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成20年3月21日(2008.3.21)
【国際特許分類】
【出願日】平成18年9月7日(2006.9.7)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]