
ガイド及び挿入システム
ツールを、組織の様な、対象にガイド及び挿入するための方法とデバイスが提供される。例示的実施例では、ツールの挿入軌跡を調整し、該ツールを望ましい貫入深さまで組織内へ進めるよう、遠隔式に制御されるガイド及び挿入デバイスが提供される。該ツールは、例えば、生検(biopsy)デバイス、近接照射療法(brachytherapy)デバイス、又は腫瘍摘除(lumpectomy)デバイスとすることが出来る。該デバイスは、目標手術サイトに対して位置付けられた該デバイスを見ながら、該デバイス及びツールが操作されることを可能にするため、コンピューテッドトモグラフィー(シーテー)画像の様な画像形成装置と共に使用するよう構成される。又該デバイスは胸の呼吸動作を受動的に補償するよう、患者上に直接位置付けられるよう構成され、それは針振動を受動的に補償する特徴を有する。他の例示的実施例では、該デバイスは完全に使い捨て可能である。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は目標手術サイト(target surgical site)にツール(tool)をガイド(guiding)し、挿入(inserting)する方法とデバイスに関する。
【背景技術】
【0002】
組織学的(histological)及び化学的(chemical)分析(analysis)用の人体の組織又は流体(human tissue or fluid)のサンプルを回収(retrieve)するために針生検(Needle biopsies)が行われる。14から20ゲージ(gauge)の針は、患者の皮膚を通して、それがそこからサンプルが抽出される該目標手術サイトに達する迄、挿入される。肺ガン(lung cancer)により引き起こされる病巣(lesion)の様な特定領域を狙うことが望ましい時は、その手順(procedure)はコンピューテッドトモグラフィー(computed tomography){シーテー(CT)}のガイド下で行われることが多い。これは繰り返し手順(iterative procedure)に帰着し、そこでは、該生検サイトを狙う初期走査に続き、角度と深さの意味での挿入軌跡(insertion trajectory)を計画し、該針がインクレメント式(incremetally)に挿入され、該針位置を検証(verify)し、調整するために患者は繰り返し走査される。その金属針が1つのシーテー走査スライス(single CT scan slice)ではっきり視認可能となるよう、該シーテーガントリー(CT gantry)は挿入の針の平面と一致するようチルトされることが多い。この相互作用手順(interactive procedure)は、医者(doctor)とサポートスタッフが、(走査時の)放射遮蔽された制御室(radiation−shielded control room)と(針を操る時の)該CT室の間を繰り返し往復(repeatedly shuttle)すること、そして挿入サイトへのアクセスを可能にするよう患者が該CTスキャナー(scanner)のリングの内外へ動かされること、を必要にする。
【0003】
従って、患者内へ針又は他のツール(tool)をガイドし挿入する改良された方法とデバイスのニーヅが残されている。
【発明の開示】
【0004】
本発明は身体又は組織の様な対象内へツールをガイドし、挿入する方法とデバイスを提供する。1つの例示的実施例では、組織表面(tissue surface)に対し配置されるよう適合されたサポートベース(support base)と、該サポートベース上に可動的に設置され、ツールを受けるためにそれを通るアパーチャ(aperture)又は視認窓(viewing window)、の様な通路(passage)を規定するキャリッジ(carriage)と、該キャリッジに結合され、該通路を通り、該サポートベースの下に位置する対象内にツールをドライブするよう適合されたドライバー(driver)と、を有するガイド及び挿入システムが提供される。
【0005】
該キャリッジは種々の技術を使って該サポートベースに可動的に結合されるが、1例示的実施例では、該キャリッジは該サポートベースに可動的に結合された第1及び第2サポートアームにより該サポートベースに可動的に設置される。該第1及び第2アームは種々の形状と寸法を有し得るが、1実施例では、各サポートアームは実質的に円弧状(arcuate)の形状を有し、それらは相互に実質的に横断するよう延びている。又各アームは中に形成された開口部(opening)を有することが出来る。該開口部は、該キャリッジの部分が第1及び第2サポートアームの開口部を通って延びられるよう相互に重なり合う(overlap)。使用時、該アームは該サポートベースに回転可能(rotatably)に結合され、該第1及び第2サポートアームの相互に対する運動は、該サポートベースに対し該キャリッジを動かす。又、該サポートベースに対し該第1及び第2サポートアームを個別に動かすために、該第1及び第2アームの各々は、その上に形成されモーターに結合するよう適合されたドライブソケットを有する。オプションで、該モーターは該デバイスが画像形成用装置と同時に使われることを可能にするために遠隔式に駆動されるよう構成されることも可能である。
【0006】
該キャリッジは種々の構成を有し得るが、1実施例では、それは該通路を通って延びるツールと契合するためにその上にスライド可能に配置され、スライド可能に動くよう適合された契合機構(engagement mechanism)を有することが出来る。該契合機構はその中に形成され、該通路を通って延びるツールを座らせるよう適合された、カットアウト(cut−out)の様な開口部を有し得る。該カットアウトは好ましくは該ツールを予め決定された位置内に入らせるよう構成されるのがよい。又該キャリッジは、それに回転可能に結合され、該キャリッジ内に形成されたトラック内で該契合機構をスライドさせるため回転するよう適合されたドライバー(driver)を有する。1実施例では、該ドライバーは、該通路を通してツールをドライブするため回転するよう適合された少なくとも1つのローラー(roller)を有する。或る例示的実施例では、該ドライバーは、ローラーを回転させるためのモーターと結合するよう適合された能動的ローラー(active roller)と、受動的ローラー(passive roller)と、を有する。該能動的ローラーは該キャリッジに結合されるが、該受動的ローラーは、該キャリッジ上にスライド可能に配置され、該通路を通って延びるツールに契合するようスライド可能(slidably)に動くよう適合された契合機構に結合される。
【0007】
又、患者の様な対象内にツールをガイドし、挿入する方法が提供されるが、該方法は、1つの例示的実施例では、ガイドシステムが目標手術サイト上に位置付けられるよう、組織表面上にガイドシステムを位置付ける過程と、該ガイドシステムの視認窓を通してツールを位置付ける過程と、を具備する。1例示的実施例では、該ツールは該ツールの遠位の部分を組織内に貫入(penetrating)させることにより位置付けられる。又該方法は、該視認窓内に位置付けられた該ツールと契合するよう該ガイドシステムを駆動する過程と、該ガイドシステムと目標手術サイトの画像を視認しながら、該ツールの軌跡を調整するよう該ガイドシステムを駆動する過程と、該ツールを組織内へ、そして目標手術サイトの方へ進めるために該ガイドシステム上のドライバー機構(driver mechanism)を駆動する過程と、を具備する。例示的実施例では、該ガイドシステムのサポートベースに旋回可能に結合された少なくとも1つのアームを旋回させることにより、該ツールの軌跡を調整するよう駆動(actuated)される。該アーム(複数を含む)は、その上に設置され、それを通して延びる視認窓を規定するキャリッジを有する。もう1つの例示的実施例では、該ツールは、該キャリッジ上に配置された契合機構を閉じた位置へスライド式に動かすことにより契合される。該ツールは契合位置で能動的ローラーと受動的ローラーの間に位置付けられ、該能動的ローラーは該ツールを進めるよう駆動される。もう1つの実施例では、該ガイドシステムと目標手術サイトの画像がコンピュータトモグラフィーを使って視認され、該ガイドシステムとドライバー機構は、遠隔式に、すなわち、該デバイスから或る距離離れて、同時に駆動され得る。
【実施例1】
【0008】
ここで開示されるデバイスと方法の、構造、機能、製造法そして使用法の原理の全般的理解を提供するために、或る例示的実施例が今説明される。これらの実施例の1つ以上の例は付随する図面で図解される。当業者は、ここで特定して説明され、付随の図面で図解されるデバイスと方法が、限定しない例示的実施例であり、本発明の範囲は請求項によっ
てのみ規定されることを、理解するであろう。1つの例示的実施例と連携して図解され、説明される特徴は他の実施例の特徴と組み合わされてもよい。この様な修正と変型は本発明の範囲内に含まれるよう意図されている。
【0009】
本発明は、生検デバイス(biopsy device)、近接照射療法(brachytherapy)デバイス、コンピュータチップ(computer chip)、ワイヤ(wires)、又は腫瘍摘除(lumpectomy)デバイスの様なツールを、組織内にガイド、挿入するための方法とデバイスを提供する。1例示的実施例では、ツールの挿入軌跡を調整し、望ましい貫入深さまで組織内へ該ツールを進めるよう、遠隔制御されることが出来るガイド及び挿入デバイスが提供される。該デバイスは、目標手術サイトに対して位置付けられる該デバイスを同時に見ながら、該デバイスとツールが操作されることを可能にするよう、コンピューテッドトモグラフィー(computed tomography){シーテー(CT)}、核磁気共鳴画像形成(magnetic resonance imaging){エムアールアイ(MRI)}、X線蛍光透視法(X−ray fluoroscopy)、又は超音波(ultrasound)の様な、画像形成方法(imaging method)と共に使用するよう構成される。又該デバイスは、呼吸胸部運動(respiratory chest motion)を受動的に補償(compensate)するように、直接患者上に位置付けられるよう構成され、針又は何等かの他のツールの振動(oscillation)を受動的に補償する特徴を有する。他の例示的実施例では、該デバイスは全部を使い捨て可能(disposable)にすることが出来る。
【0010】
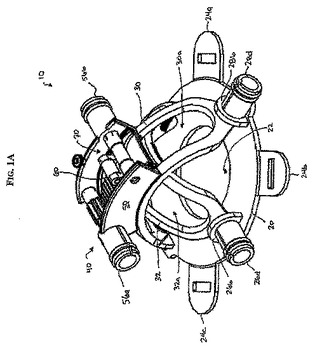
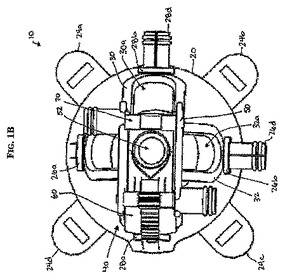
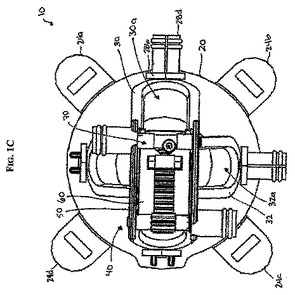
図1A−1Cは、ツールを組織内へガイド、挿入するためのガイド及び挿入デバイス10の1つの例示的実施例を図解する。一般に、該デバイス10は組織表面上に位置付けられるよう適合されたサポートベース20を有する。第1及び第2サポートアーム30,32は該サポートベース20に可動式に結合され、各アーム30,32はそれを通して形成された開口部30a、32aを有する。又該デバイス10は、該第1及び第2サポートアーム30,32に可動式に結合されたキャリッジ組立体40を有する。該キャリッジ40は、ツールを受けるための、ここで視認窓52(図1B)と呼ばれる、通路を規定するキャリッジ50と、該視認窓52を通って延びるツールと契合するよう構成された契合機構60と、該視認窓52を通るよう該ツールをドライブするためのドライバー機構70と、を有する。使用時、該ガイド及び挿入デバイス10は患者の組織表面上に位置付けられ、ツール(示されてない)は該キャリッジ50内の該視認窓52を通るよう位置付けられる。該契合機構60は該ツールと契合するために開いた位置(図1B)から閉じた位置(図1C)へ動かされ、第1及び第2アーム30,32は該サポートベース20に対し動かされ、それにより該キャリッジ50とそれを通るよう延びる該ツールの位置を調整する。該デバイス、ツールそして目標組織サイトの画像は、該キャリッジ50と従って該ツール挿入軌跡の位置付けを容易にするために、同時に使われる。一旦該ツールが適切に位置付けられると、該ツールを望ましい貫入深さまで組織内へドライブするために該ドライバー機構70が駆動される。該ツールの適切な深さまでの挿入を同時に見て実現するために画像形成が同様に使われる。例示的実施例では、該デバイス10は生検プローブ又は針を、腫瘍(tumor)の様な目標手術サイトへガイドし、挿入するため使われる。しかしながら、当業者は該デバイスが種々のツールをガイド及び挿入するため使われることを評価するであろう。
【0011】
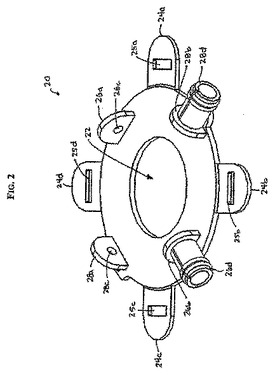
該デバイスのサポートベース20は種々の構成、形状そして寸法を有し得るが、それが患者の組織表面上に位置付けられ、キャリッジ組立体40をサポートするための安定な足場(footing)を提供するよう適合されるのが好ましい。図2でより詳細に示される様に、図解された実施例では、該サポートベース20はそれを通るよう形成された開口部22を伴う概ね平面状で、円形の形状を有する。該開口部22は目標組織サイトへのア
クセスを提供するよう構成され、かくしてそれはそれを通してツールを受けるのに充分な寸法と形状を有するのが好ましい。当業者は、該サポートベース20とそれを通るよう形成される開口部22が種々の他の形状と寸法を有し得ることを評価するであろう。例えば、該サポートベース20及び/又は開口部は正方形、楕円形、長方形、三角形、他とすることが出来る。又サポートベース20は患者の身体、又は種々の器官の輪郭にマッチするよう形作られても良い。例えば、該サポートベース20は、患者の身体上の特定の場所への位置付けを容易にするために実質的に凹面又は凸面とすることが出来る。他の実施例では、該サポートベースは2つの部品、下方及び標準化された上方の部分から成り、そこでは該下方部分は1つの範囲のパーツ(parts)を有し、各パーツは患者の身体の特定部分の輪郭にマッチするよう形作られ、該標準化された上方部分は該種々の下方部分パーつの何れかに嵌合するよう適合される。
【0012】
又該サポートベース20は、該サポートベース20を組織表面に固定するために、孔(holes)、スロット、タブ(tabs)又は接着性スチッカー(adhesive stickers)、他の様な1つ以上の固定機構又はフィーチャー(one or more securing mechanisms or features)を有する。図2に示す様に、該サポートベース20はその回りに配置された4つのタブ24a、24b、24c、24dを有する。該タブ24a−dは該サポートベース20を組織表面に止める(tape)よう使われる。代わりに、又は加えて、該タブ24a−dは該サポートベース20を患者上に固定するストラップ又は他の要素を受けるためにその中に形成されたスロット25a、25b、25c、25dを有する。4つのタブが示されるが、該サポートベース20はどんな数のタブを有することも出来て、そして/又は、それは組織表面に該サポートベース20を一時的に固定する種々の他のフイーチャー(features)を有することも出来る。
【0013】
上記で示した様に、該サポートベース20は好ましくは該キャリッジ組立体40をサポートするよう構成されるのがよい。例示的実施例では、該キャリッジ組立体40は第1及び第2アーム30,32により該サポートベース20に可動式に結合される。従って、該サポートベース20は該第1及び第2アーム30,32を該サポートベース20に嵌合させるためのフイーチャを有する。図2に示す様に、該サポートベース20は、該第1サポートアーム30を受けるために該サポートベース20の相対する側から延び、該側に位置付けられた第1対の嵌合要素(mating elements)26a、26bと、該第2サポートアーム32を受けるために該サポートベース20の相対する側から延び、該側に位置付けられた第2対の嵌合要素28a、28bと、を有する。各嵌合要素26a、26b、28a、28bの形状は下記で更に詳述する該第1及び第2アーム30,32の形状により変わるが、1つの例示的実施例では該第1及び第2対の嵌合要素26a、26b、28a、28bは該サポートアーム30,32を該サポートベース20に旋回式(pivotally)に嵌合させるよう構成される。これは、例えば、ピンとボアの結合(pin and bore connection)を使って達成出来る。図2に示す様に、各嵌合要素26a,26b,28a、28bは、該第1及び第2アーム30,32上に形成された対応するピンを受けるためにその中に形成されたボアを有する直立したタブの形である(2つのボア26c、28cのみが示されている)。又各嵌合要素26a,26b,28a、28cの位置は相互に対する該第1及び第2アーム30,32の望ましい位置により変わる。例示的実施例では、示される様に、該第1対の嵌合要素26a、26bは第2対の嵌合要素28a、28bから90°オフセットされて位置付けられ、かくして該嵌合要素26a,26b,28a、28bは該サポートベース20の周囲に等間隔で隔てられている。結果として、第1及び第2アーム30,32が該嵌合要素26a,26b,28a、28bと嵌合すると、該アーム30,32は、それらが相互に交叉するよう相互に対し実質的に横断するよう延びる。
【0014】
更に図2に示す様に、2つの嵌合要素、例えば、嵌合要素26bと28bは、下記で詳述する様に、モーターを該第1及び第2アーム30,32に結合するために、その上に形成された結合要素26d、28dをオプションで有することが出来る。各結合要素26d、28dは種々の形状を有することが出来て、その特定の形状は、該サポートベース20に対し該第1及び第2アーム30,32を回転するために使われるモーターの形状により変わってもよい。図解された実施例では、各結合要素26d、28dは単に円柱形のハウジング又はソケットであり、それはモーター上のドライバーを受けるためにそれを通して延びる開口部と、その外面に形成され、該モーターと契合し、その回転を防止するよう構成されたバンドと、を有する。各結合要素26d、28dの該開口部は、該モーター上のドライバーが該結合要素26d、28dを通して延び、下記で詳述する様に、該第1及び第2アーム30,32上に形成されたドライブソケットと嵌合することを可能にするために、嵌合要素26b、28b内に形成された開口部と整合されるのが好ましい。当業者は、1つ以上のモーターを該デバイス10に結合するため種々の技術が使われ得ること、又は代わりに該モーター(複数を含む)が該デバイス上に一体に形成されたり、又は該デバイス内にビルトインされ、かくして何等かの結合要素のニーヅも取り除き得ることを評価するであろう。しかしながら、外部モーターの使用は、決して患者に接しないモーターが該デバイスからアンクリップ(unclipped)されることを可能にする。その時該デバイスは捨てられ(discarded)得る。
【0015】
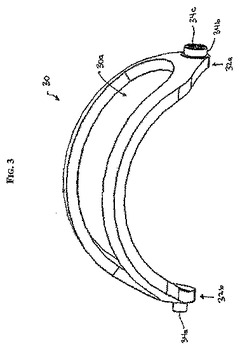
又該第1及び第2アーム30,32は種々の形状を有し得るが、1つの例示的実施例では、該アーム30,32は該サポートベース20に旋回可能()に結合されるよう構成され、それらは該サポートベース20上に或る距離で該キャリッジ組立体40を保持し、位置付けるよう適合される。図3は該アーム30の1つをもっと詳細に図解する。示される様に、該アーム30は、該サポートベース20上で該嵌合要素、例えば、要素28a、28bに嵌合するよう適合された相対する端部32a、32bを有する概ね円弧状の形状を備える。前に論じた様に、例示的実施例では、サポートベース20上で該アームを結合要素26a,26b,28a、28bと嵌合させるために、ピンとボアの結合(pin and bore connection)が使われる。図3に示す様に、該アーム30の該第1及び第2端部32a、32bは各々、その上に形成され、サポートベース20上の嵌合要素28a、28b内に形成されたボア(図2では1つのボア28cのみが示される)内に延びるよう適合されたピン34a、34bを有する。該第2アーム32は該第1アーム30と同様な形状を有する。
【0016】
上記で示した様に、該嵌合要素の2つ、例えば、嵌合要素26b、28bはモーターとの嵌合用の結合要素26d、28dを有する。従って、各アーム30,32上のピンの1つは該結合要素に結合されたモーター上のドライバーを受けるために中に形成されたドライブソケット(drive socket)を有する。図3に示す様に、ピン34bはモーター上のドライバーを受けるためにその中に形成されたドライブソケット34cを有する。該ドライブソケット34cは相補的形状(complementary shape)を有するドライバーを受けるために、6角形又は正方形の様な、形状を有してもよい。結果として、該ドライバーが該ソケット34c内に位置付けられると、該ドライバーの回転は該ソケット34cに回転力を印加するのに効果的であり、それにより該アーム30を回転させる。該アーム30,32を回転させる例示的モーターは下記でもっと詳細に論じる。
【0017】
又、各アーム30,32はその中に形成されたスリット又は開口部を有する。各アーム30,32内の該開口部の形と寸法は種々であるが、例示的実施例では該アーム30,32内の該開口部はそれを通してキャリッジ組立体40の部分を受けるために重ね合わさるよう構成される。この様な構成は、下記でもっと詳細に論じる様に、該アーム30,32が該サポートベース20に対して該キャリッジ組立体40を動かすための2重トラック(double−track)を形成することを可能にする。図3は、その第1及び第2端部32a、32b間でそれを通して延びる細長い開口部30aを有する。該アーム30,32が該サポート20と嵌合すると、図1A−1Cで示す様に、該開口部30a、32aは重なり合い、キャリッジ組立体40の部分はそれらを通って延びる。
【0018】
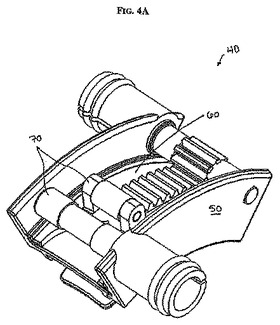
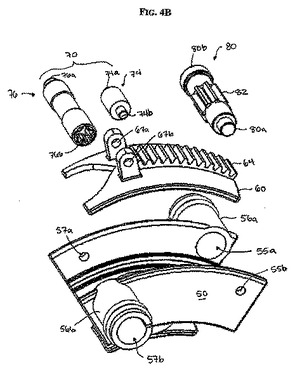
キャリッジ組立体40は図4Aと4Bで詳細に示され、図示の様に該キャリッジ組立体40は総合的に、ツールを受ける開口部を規定するキャリッジ50と,該キャリッジ50内の該開口部を通って延びるツールと契合する契合機構60と、そして該キャリッジ50内の該開口部を通るようツールをドライブするドライバー機構70と、を有する。当業者は、該キャリッジ組立体40が種々の他の構成を有し、種々の他の技術が組織内へツールと契合し、位置付けそしてドライブするため使われ得ることを評価するであろう。
【0019】
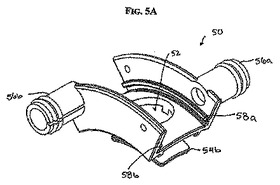
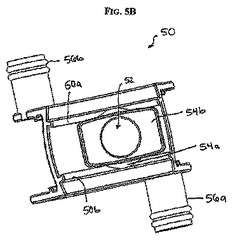
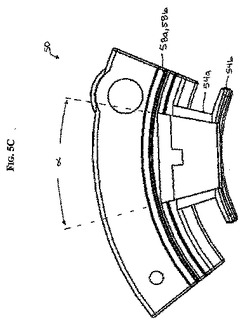
該キャリッジ50は図5A−5Cでもっと詳細に示されるが、図示の様に該キャリッジ50はそこから延びる相対する側壁を有する概ね円弧状の底面を備えるハウジングの形をしている。該キャリッジ50の該円弧状の底面は、該キャリッジ50が、該サポートアームの1つ、例えば、図1A−1Cで示す第1サポートアーム30、に沿ってスライドすることを可能にしており、該側壁は該キャリッジ50が、該キャリッジ50を通って延びるツールと契合するための契合機構60をスライド出来るように受けることを可能にする。更に図5Aと5Bで示す様に、該キャリッジ50はツールを受けるためにその底面を通るよう延びる開口部又は視認窓52を有する。該視認窓52は中空のハウジング54aを通って延びるが、該ハウジングは該キャリッジ50の底面に結合され、該キャリッジ50上の延長部(extension)を形成する。該中空のハウジング54aは該キャリッジ50が該第1及び第2サポートアーム30,32に結合されることを可能にする。特に該ハウジング54aは、該キャリッジ50が該サポートアーム30,32と契合し、その動きに応答して動かされることを可能にするよう、該第1及び第2サポートアーム30,32の開口部30a,32aを通って延びている。該中空ハウジング54aの特殊な形状は、それを通して挿入されるべきツールの寸法と形状のみならず、アーム30,32内の開口部30a、32aの形に依っても変わり得る。例示的実施例では、該ハウジング54aは種々の寸法の種々のツールがそれを通して挿入されることを可能にするに充分な形と寸法を有する。又該ハウジング54aの形状と寸法は好ましくは視認窓52内でツールが旋回することを可能にするよう構成されるのがよく、かくしてツールを概ね直立する位置に緩く保持する、一方該ツールが動かされ、巧みに扱われる(manipulated)ことを可能にする。又視認窓52は該デバイス10が患者内に植え込まれた(implanted)ツール上で除去されることを可能にする寸法を有する。図5Cに示す実施例では、該ハウジング54aは概ね円錐形であり、ツールが旋回可能なよう動ける円錐形の運動範囲を規定する。該円錐形の角度αは望ましい運動範囲と使われる特定のツールとにより変わるが、1つの例示的実施例では、該円錐角度αは10から15°の範囲内にある。
【0020】
更に図5A−5Cに示す様に、該キャリッジ50は又該ハウジング54aの終端部(terminal end)の周りに形成されたフランジ54bを有する。該フランジ54bはサポートアーム30,32上に該キャリッジ50を保持又はロックするよう構成され、該デバイスの使用中、偶然に契合が外れる(disengagement)ことを防止する。又該フランジ54bは該キャリッジ50が容易に分解され、もし望むならサポートアーム30,32から除去されることを可能にする形状を有する。図5Aと5Cで示す様に、該フランジ54bは実質的に長方形である。この様な形状は、開口部30a、32aが相互に整合された時、該フランジ54bがサポートアーム30,32の開口部30a、32aを通して或る角度で挿入されることを可能にして、そして次いで、該アームの1つ、例えば、第2アーム32は、該キャリッジ50を該アーム30,32上にロックするよう90°回転されることが可能である。次いで該アーム30,32は僅かに圧縮され、該サポートベース20上で該第1及び第2対の嵌合要素26a、26b,28a、28b間でスナップ(snapped)される。
【0021】
又該キャリッジ50は該サポートアーム30,32に対し該キャリッジ50の位置付けを容易にするためその下方の面又は底面上に形成されるレール50a、50bを有する。特に、該キャリッジ50は該アームの1つ、例えば、第1アーム30上に休止するよう構成されるのが好ましい。該レール50a、50bは該キャリッジ50の底面に沿って延び、それらは第1アーム30内又は第1アーム30付近の開口部30a内に位置付けられるよう構成される。該レール50a、50bは該第1アーム30に対する該キャリッジ50の回転を防止し、それにより該キャリッジ50が外れることを防止する。又該レール50a、50bは該第1アーム30に沿う該キャリッジ50のスライド運動を容易にする。
【0022】
更に図5Aと5Cで示す様に、該キャリッジ50は更に、該契合機構60をスライド可能に受けるためにその中に形成されたトラック58a、58bを有するが、該機構は該キャリッジ50内の視認窓52を通って延びるツールと契合するよう適合されている。図解されたトラック58a、58bは、該キャリッジ50の内部側壁に沿って延び、該契合機構60をスライド可能に座らせるための溝(groove)を規定する、相対したレールの形をしている。
【0023】
又該キャリッジ50は、下記で論じる様に、モーターを、契合機構60移動用ドライバー80とツール前進用ドライバー70と、に嵌合させるために、第1及び第2結合要素56a、56bの様な、他のフイーチャ(features)を有する。該第1及び第2結合要素56a、56bはサポートベース20上の結合要素26d、28dと同様であり、特に、それらはモーター上のドライバーを受けるためにそれを通って延びるボアを有する実質的に円柱形のハウジングの形とすることが出来る。
【0024】
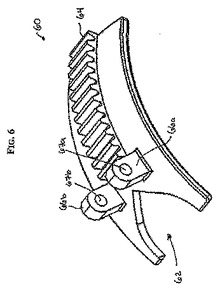
例示する契合機構60が図6に詳細に示され、図示の様にそれは円弧形のプロフアイルを有する概ね細長い形を備える。該円弧形は該契合機構60が、該キャリッジ50内に形成されたトラック58a、58b内にスライド可能に座り、該契合機構60が該視認窓52へのアクセスを提供するため該視認窓52から或る距離離れ隔てられる開き位置(図1Bに示す)と、該契合機構60が該視認窓52を通って延びるツールと契合するために該視認窓52上に延びる閉じ位置(図1Cに示す)と、の間を動くことを可能にする。該視認窓52を通って延びるツールとの契合を容易にするため、該契合機構60は中に形成され、ツールを受けるよう適合されたカットアウト(cut−out)62を有する。該カットアウト62は種々の形と寸法を有してもよいが、1つの例示的実施例では、図6に示す様に、該カットアウトは実質的に3角形である。この様な形は、該カットアウト62が針の様なツールを該カットアウト62との水平整合へ促すことを可能にする。
【0025】
上記説明の様に、該契合機構60は好ましくは開き位置と閉じ位置の間で移動可能であるのがよい。該契合機構60のスライド可能な運動は種々の技術を使って達成されるが、1つの例示的実施例では、該キャリッジ50は、その上に形成され、該キャリッジ50内に形成されたトラック58a、58b内で該契合機構60をスライドさせるのに適合したドライバー80を有する。1つの例示用ドライバー80が図4Aと4Bで示されるが、図示の様に、該ドライバー80はその上に形成された歯(teeth)又はギヤ(gear)82を有するシャフトの形をしている。該ギヤ82は該契合機構60の表面上に形成された対応する歯又はギヤ、すなわちラック(rack)64と嵌合するよう構成される。結果として、第1方向の該ドライバー80の回転は、該キャリッジ50内で第1方向に該契合機構60をスライドさせるのに有効であり、反対方向の該ドライバー80の回転は該キャリッジ50内で第2の、反対の方向に該契合機構60をスライドさせるのに有効であり、それにより該開き位置と閉じ位置の間で該契合機構60を動かすことになる。該ドライバー80は、下記で詳細に説明する様にモーターを使って回転させられる。好ましくは、該ドライバー80の相対する端部80a、80bは、該キャリッジ50内に形成される相対する開口部55a、55b内に回転可能に位置付けられるよう構成される。該端部の1つ、例えば、端部80bはモーター上のドライバーを受けるためにその中に形成されたドライブソケット(drive socket)を有する。該ドライブソケットは図3に関連して前に説明したドライブソケット34cと同様である。使用時、該ドライバー80がキャリッジ50と結合されると、モーターは、モーター上のドライバーが該結合要素56aを通るよう位置付けられ、該ドライバー80上の該ドライブソケットと結合されることを可能にするよう、該結合要素56aに結合される。該モーターの駆動は該ドライバーを回転させ、それにより該契合機構60を動かすよう該ドライブソケット、ひいては該ドライバー80を回転させる。
【0026】
前に説明した様に、該キャリッジ組立体40は又、視認窓52を通り組織内へツールをドライブするドライバー70を有する。図4A及び4Bはドライバー70の1つの例示的実施例を図解するが、該ドライバーは、該契合機構60と嵌合する受動的ローラー74と、該キャリッジ50と嵌合する能動的ローラー76と、を有する。該能動的ローラー76はツールを該視認窓52を通してドライブするためドライバーにより回転されるよう構成され、該受動的ローラー74は、下記で論じられる様に、それに対する該ツールの運動の結果として回転するよう構成される。該ローラー74,76は種々の技術を使って該契合機構60とキャリッジ50の上に設置され得るが、例示的実施例では各ローラー74,76は、対応する開口部又はボア内で受けられるよう構成された相対する端部を有する。特に、該能動的ローラー76は、該キャリッジ50の相対する側壁内に形成された対応するボア57a、57b内に延びる相対する端部76a、76bを有する。該受動的ローラー74は該契合機構60内に形成された対応するボア67a、67b内に延びる相対する端部74a、74bを有する。図4B及び6に示す該ボア67a、67bは、該契合機構60の面上に形成され、そこから延びる相対するアーム66a、66b内に形成される。該相対するアーム66a、66bは、該契合機構60が閉じた位置にある時、該受動的ローラー74が該ドライブローラー76に隣接して位置付けられることが出来るよう、該カットアウト62に隣接して位置付けられる。結果として、該視認窓52を通して延びるツールは該受動的及び能動的ローラー74,76の間に契合される。
【0027】
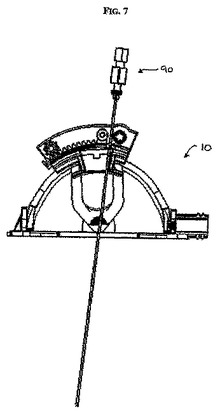
該ドライバー70を駆動するために、該能動的ローラー76の1端、例えば、76bは中に形成されたソケットを有し、モーター上のドライバーを受けるよう構成される。該ソケットは図3に関連して前に説明されたソケット34cと同様である。使用時、該能動的ローラー76が該キャリッジ50と結合されると、モーターは、該モーター上のドライバーが該結合要素を通り、該ドライブローラー76内により形成されたソケット内に延びるよう、該結合要素56bと嵌合する。結果として、該モーターが駆動されると、該ドライバーは該ソケットを回転させるよう回転し、それにより該ドライブローラー76を回転させる。該ドライブローラー76はかくして、該ドライブローラー76と該受動的ローラー74の間に位置付けられたツールを、組織内へ進ませる。又該ドライブローラー76は該ツールを組織から引き込める(retract)ために、逆方向にドライブされ得る。図7は、生検針90の形で、それを通して延びる、ツールを有するデバイス10を図解する。示される様に、該ツール90が該契合機構60内の該カットアウト部分内に位置付けられ、そして該受動的及び能動的ローラー74,76の間に契合されるように、該契合機構60は閉じた位置に移る。
【0028】
ツールの動きを容易にするため、該ドライブローラー及び/又は受動的ローラー74,76は、その少なくとも1部分の周りに配置された、ゴム(rubber)の様な、保護部材をオプションで有する。該保護部材は該ローラー(複数を含む)74,76間の接触応力(contact stresses)を減じるために有効であり、それは該ツールが組織内へ又は組織から外へドライブされる時該ローラー(複数を含む)74,76間の
トラクション(traction)を改良する。
【0029】
上記で示す様に、モーターは該アーム30,32を該サポートベース20に対し回転されるために使われ、それによりキャリッジ組立体40内の該視認窓52を望まれる配向にに位置付ける。又モーターは該キャリッジ50内で該契合機構60をスライドさせるために使われ、それにより該視認窓52を通って延びるツールと契合しそして契合を外す。モーターは更に、該視認窓を通って延び、契合機構60内で該能動的ローラー76と受動的ローラー74の間に契合されるツールを、進ませそして引き込ませるために該能動的ローラー76を回転させるよう使われる。例示的実施例では、アーム30,32の運動、該契合機構60の運動、そしてツールを進めそして引き込めるドライバーの駆動、を制御するために、各モーターが個別に駆動されることを可能にするために、別々のモーターが各結合要素26d,28d,56a、56bと取り外し可能に嵌合するよう構成される。この様な取り外し可能な結合は、それが全デバイス10がポリマーの様な使い捨て可能な材料(disposable material)で形成されることを可能にするので、特に有利である。患者の皮膚に接触しない該モーターは、使用後該デバイス10から簡単に取り外され得て、該デバイス10は捨てられることが可能である。
【0030】
課題の各々を行うために種々の種類のモーターが使われ得るが、使われ得る1つの例示的タイプのモーターはステップモーターであり、該ステップモーターはデジタルのパルス入力をインクレメンタル(incremental)なシャフト回転に機械的に変換する電磁的回転アクチュエーター(electromagnetic, rotary actuator)である。適当なロジックを用いると、ステップモーターは双方向で、同期性を有し、急速な加速、停止そして逆進(reversal)を提供し、そして他のデジタル機構と容易にインターフエース(interface)する。結果として、モーターは各運動の精確で精密な制御を許容する。1つの例示的ステップモーターは、遊星ギヤヘッド(planetary gear head)と256:1の減速比(reduction)を有するシリースエイエム1020モーター(series AM 1020 Motor)である。該モーターのステップ角は18°で、かくして0.07°の角度位置分解能(angular position resolution)が得られることを可能にする。又該モーターは、約360°/sの速度で該アーム30,32を動かすことにより該視認窓52内にツールを位置付けられるよう配向し、約20mm/sの速度で組織内にツールをドライブする、能力を有する。他の実施例では、該ドライバーを駆動し、該アームを回転させるために直流モーター(DC motor)、油圧(hydraulics)、バッテリー電力(battery power)、又は他の技術が使われ得る。
【0031】
もう1つの実施例では、該デバイス10は、該サポートベース20,サポートアーム30,32,及び/又はキャリッジ組立体40、の中にマーカー(markers)を有することが出来る。該マーカーは、例えば、患者、目標手術サイト、デバイス、及び/又は画像形成装置を含む座標システム(coordinate system)内の基準点(reference points)を創るために、該マーカーが患者の画像内で見られることを可能にするよう、放射線不透過性(radiopaque)材料で形成される。該基準点は該目標手術サイトへ該ツールを自動的に向ける(automatic targeting)ことを容易化するため使われる。例えば、該デバイス10は、サポートベース20内に、シーテー(CT)画像内に現れる金属部品を含み、ツールを目標手術サイトへ挿入するために、当業者が該デバイス10用の正しい入力パラメーターを計算することを可能にする。
【0032】
図8A−8Gは該デバイス10を使う例示的方法を図解する。該デバイス10は種々のツールを組織内へガイド及び挿入するため使われるが、1つの例示的実施例では、該デバ
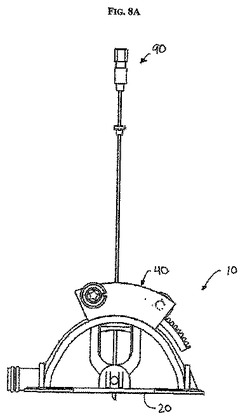
イス10は分析用サンプルを取り除くために組織内へ生検針をガイド及び挿入するため使われる。該デバイス10は腫瘍(tumor)の様な目標手術サイト上の場所で患者の組織表面(示されてない)上に直接位置付けられる。該デバイス10が患者の上に位置付けられるので、該デバイスは、患者と共に、例えば、呼吸時の患者の胸部(chest)の上下(rise and fall)と共に、動く。モーターは、前記論議の様に、該デバイス10上の各結合要素26d,28d,56a、56bに結合される。該モーターは制御ボックス(control box)に接続されるが、該ボックスは今度は該モーターが遠隔から駆動されることを可能にするようコンピュータに接続される。該デバイス10は該サポートベース20上のタブ24a、24b、24c、24dとストラップ(straps)、接着剤(adhesives)、他を使って患者に固定(secured)される。一旦該デバイス10が固定されると、生検針90は、図8Aに示すように、該キャリッジ組立体40内の視認窓52を通して位置付けられる。契合機構60は該視認窓52へのアクセスを提供するよう開いた位置にある。次いで針90の遠位の先端が挿入点に位置付けられ、それは組織内へ少なくとも部分的に貫入させられる。この位置で、図8Bに示す様に、針90は視認窓52内で自由に旋回することが出来る。
【0033】
例示的実施例では、該デバイス10は、コンピューテッドトモグラフィー(computed tomography){シーテー(CT)}、核磁気共鳴画像形成法(magnetic resonance imaging){エムアールアイ(MRI)}、超音波、X線、X線蛍光透視法(X−ray fluoroscopy)、他の様な、画像形成の方法及びシステムと共に使われる。該デバイス10はプラスチックの様な非金属材料で形成されるので、該デバイス10は画像と干渉せず、それは、例えば、シーテー又はエムアールアイ機械の制限(confines)内に適合(fit)するよう寸法決めされ得る。ピエゾ電気モーター(piezoelectric motor)の様なエムアールアイ適合性のモーター(MRI−compatible motors)を有するプラスチックデバイスがエムアールアイ機械の強い磁気的環境内で安全に使われ得る。一旦患者の上に位置付けられると、オペレーターはその部屋を出て該モーターを制御するコンピュータを含む制御室から遠隔式に該デバイスを操作出来る。患者は該デバイス10で走査され、針90が患者上に位置付けられ、画像が見られる。同時に画像を見ながら、ユーザーは直観的インターフエース(intuitive interface)を通して遠隔式に該針の挿入の角度と深さを制御出来る。図8Cで示す様に、契合機構60と結合されたモーターはドライバー80を回転させるよう駆動され、それにより該契合機構を閉じた位置へスライドさせる。これは該契合機構60上の該カットアウト部分に該カットアウト部分を用いて該針90と契合させ、それを配向させ、そして該針90を受動的及び能動的ローラー74,76の間に位置付けさせる。該契合機構90を閉じる前か、又は後か、何れかに、第1及び第2アーム30,32の各々に取り付けられたモーターは、該サポートベース20に対する望ましい角度の配向へ、該第1及び第2アーム30,32を回転させるため個別に駆動される。該第1及び第2アーム30,32が該サポートベース20に対して旋回すると、該キャリッジ組立体40は、図8Dに示す様に、動き、それにより針90を望ましい角度配向に位置付ける。該針の特定の角度の配向は画像形成装置を使って確認され、もし必要なら、該アーム30,32は、望ましい角度の配向が達成されるまで、更に該キャリッジ組立体40そして該針90を位置付けし直すため動かされる。
【0034】
一旦該針90が望ましい挿入角度で適切に配向されると、該能動的ローラー76に結合されたモーターは能動的ローラー76を回転させるよう駆動され、それにより、図8Eに示す様に、針90を組織内へドライブする。該モーターは、画像形成装置を使って視認され得る挿入の速度及び/又は深さを制御するため使われる。該デバイスは、モーターへの異常トルク負荷をアセスするため、そして該トルク負荷が予め決められた負荷を越えた時針挿入を停止するために、オプションでフイードバック(feedback)を有してもよい。又挿入深さは、該針の挿入深さを制限するために該針90上に形成された停止部を
使って制御されることも可能である。例えば、該針90の近位の部分はその周りに配置され、該受動的及び能動的ローラー74,76に対し突き当たるよう構成された、フランジを有してもよい。又深さ停止部として機能するクランプも使われ得る。他の実施例では、目標手術サイトに対して針を視認することを容易にするため、カメラ又は他の画像形成機構が該デバイス又は針上に直接設置されることも出来る。又オプションとして、該針90は挿入深さを示すためにその上に形成された深さマーキングを有してもよい。
【0035】
目標手術サイトから組織サンプルを得るため針90が完全に挿入された後、オプションで該能動的ローラー76を反対方向に回転させるためドライバーが駆動され、それにより該針90は組織から取り除かれる。代わりに、該針90が展開された儘残り、図8F及び8Gに示す様に、外科医(surgeon)が該針90を取り除くことが出来るよう、該契合機構60は開いた位置へ動かされ得る。これは、該針90が該デバイス10により緩やかに保持され、患者内になお貫入された儘である時、特に有利である。該針90はかくして患者又は何等かの内部器官と共に動くことが出来て、かくして内部組織又は器官を損傷する危険が減じられる。又オプションでは、該デバイス10は、該針90が該針90上でデバイス10をスライドさせることにより患者から取り除かれる前に、取り除かれることも可能である。当業者は該過程が事実上どんな順序で行われてもよく、行われる手順(procedure)により変わってもよいことは評価するであろう。
【0036】
前に示した様に、該針90の位置付けを制御するために、画像形成装置及び該デバイス10と連携してオプションでソフトウエアインターフエースが使われ得る。例えば、該ソフトウエアは、挿入角度を受信し、その位置を得るよう該デバイスに命令(command)するよう構成されてもよい。代わりに、該ソフトウエアは、挿入角度を決定し、その角度を得るよう該デバイスに命令するよう構成されてもよい。又該ツールが5°の様なインクレメントで動かされることを可能にする、小さな”ジョグ(jogs)”も可能である。ユーザーの入力は望まれる回転と速度に変換され、該制御器へ送られ、該制御器は今度は個別モータードライバーへステップ命令(step commands)を送る。針挿入深さは同様に制御され得る。他の実施例では、該デバイス10は該デバイスを駆動するためジョイスチック(joystick)又はワンド(wand)を有することが出来る。
【0037】
当業者は、上記説明の実施例に基づき本発明の更に進んだ特徴と利点を評価するであろう。従って、本発明は、付随する請求項に示されたものを除けば、特定して示され、説明されたものにより限定されるべきでない。ここで引用された全ての刊行物と引用文献はそれらの全体での引用によりここに明示的に組み入れられる。
【図面の簡単な説明】
【0038】
本発明は付随する図面と連携して行われる付記詳細説明から完全に理解されよう。
【図1A】ガイド及び挿入デバイスの1例示的実施例の斜視図である。
【図1B】開いた位置の契合機構を示す、図1Aのガイド及び挿入デバイスの平面図である。
【図1C】閉じた位置の契合機構を示す、図1Aのガイド及び挿入デバイス平面図を示す。
【図2】図1A−1Cのガイド及び挿入デバイスのサポートベースの斜視図である。
【図3】図1A−1Cのガイド及び挿入デバイスのサポートアームの斜視図である。
【図4A】図1A−1Cのガイド及び挿入デバイスのキャリッジ組立体の斜視図であり、キャリッジ、契合機構及びドライバーを示す。
【図4B】図4Aに示すキャリッジ組立体の組立分解図である。
【図5A】図4A及び4Bに示すキャリッジの斜視図である。
【図5B】図5Aに示すキャリッジの底面図である。
【図5C】図5A及び5Bに示すキャリッジの断面図である。
【図6】図4A及び4Bに示す契合機構の斜視図である。
【図7】図1A−1Cのガイド及び挿入デバイスの断面図である。
【図8A】ガイド及び挿入システムの側面図であり、図1A−1Cのガイド及び挿入デバイスと、該デバイス内に形成された視認窓を通るよう位置付けられた針と、を示す。
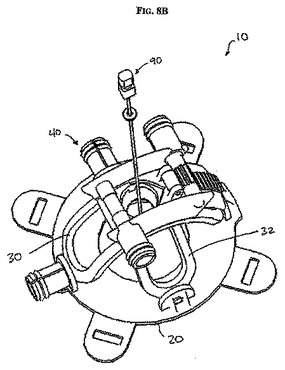
【図8B】図8Aに示すガイド及び挿入システムの斜視図であり、針の移動を可能にする視認窓を示す。
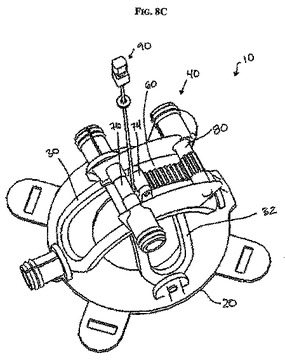
【図8C】針と契合するために閉じた位置へ動かされたスライドする契合機構を有する図8A−8Bのガイド及び挿入システムを示す斜視図である。
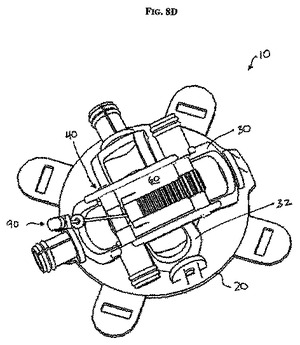
【図8D】該デバイスのキャリッジを動かし、それにより針の挿入軌跡を調整するよう、旋回された該デバイスの第1及び第2アームを有する、図8Cのガイド及び挿入システムを示す平面図である。
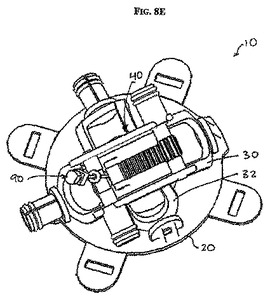
【図8E】該ガイド及び挿入デバイス上のドライバー機構により進められた針を有する図8Dのガイド及び挿入システムを示す平面図である。
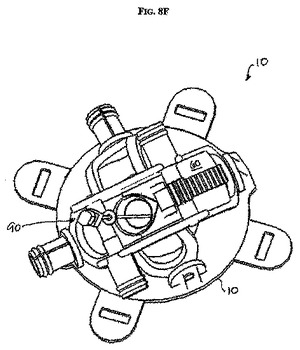
【図8F】該針をリリースするため開き位置へ動かされた契合機構を有する図8Eのガイド及び挿入システムを示す平面図である。
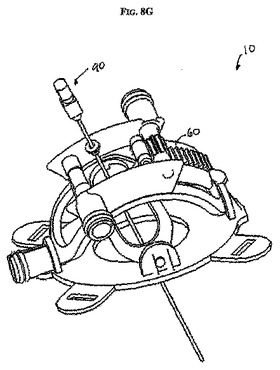
【図8G】図8Fに示すガイド及び挿入システムの斜視図である。
【技術分野】
【0001】
本発明は目標手術サイト(target surgical site)にツール(tool)をガイド(guiding)し、挿入(inserting)する方法とデバイスに関する。
【背景技術】
【0002】
組織学的(histological)及び化学的(chemical)分析(analysis)用の人体の組織又は流体(human tissue or fluid)のサンプルを回収(retrieve)するために針生検(Needle biopsies)が行われる。14から20ゲージ(gauge)の針は、患者の皮膚を通して、それがそこからサンプルが抽出される該目標手術サイトに達する迄、挿入される。肺ガン(lung cancer)により引き起こされる病巣(lesion)の様な特定領域を狙うことが望ましい時は、その手順(procedure)はコンピューテッドトモグラフィー(computed tomography){シーテー(CT)}のガイド下で行われることが多い。これは繰り返し手順(iterative procedure)に帰着し、そこでは、該生検サイトを狙う初期走査に続き、角度と深さの意味での挿入軌跡(insertion trajectory)を計画し、該針がインクレメント式(incremetally)に挿入され、該針位置を検証(verify)し、調整するために患者は繰り返し走査される。その金属針が1つのシーテー走査スライス(single CT scan slice)ではっきり視認可能となるよう、該シーテーガントリー(CT gantry)は挿入の針の平面と一致するようチルトされることが多い。この相互作用手順(interactive procedure)は、医者(doctor)とサポートスタッフが、(走査時の)放射遮蔽された制御室(radiation−shielded control room)と(針を操る時の)該CT室の間を繰り返し往復(repeatedly shuttle)すること、そして挿入サイトへのアクセスを可能にするよう患者が該CTスキャナー(scanner)のリングの内外へ動かされること、を必要にする。
【0003】
従って、患者内へ針又は他のツール(tool)をガイドし挿入する改良された方法とデバイスのニーヅが残されている。
【発明の開示】
【0004】
本発明は身体又は組織の様な対象内へツールをガイドし、挿入する方法とデバイスを提供する。1つの例示的実施例では、組織表面(tissue surface)に対し配置されるよう適合されたサポートベース(support base)と、該サポートベース上に可動的に設置され、ツールを受けるためにそれを通るアパーチャ(aperture)又は視認窓(viewing window)、の様な通路(passage)を規定するキャリッジ(carriage)と、該キャリッジに結合され、該通路を通り、該サポートベースの下に位置する対象内にツールをドライブするよう適合されたドライバー(driver)と、を有するガイド及び挿入システムが提供される。
【0005】
該キャリッジは種々の技術を使って該サポートベースに可動的に結合されるが、1例示的実施例では、該キャリッジは該サポートベースに可動的に結合された第1及び第2サポートアームにより該サポートベースに可動的に設置される。該第1及び第2アームは種々の形状と寸法を有し得るが、1実施例では、各サポートアームは実質的に円弧状(arcuate)の形状を有し、それらは相互に実質的に横断するよう延びている。又各アームは中に形成された開口部(opening)を有することが出来る。該開口部は、該キャリッジの部分が第1及び第2サポートアームの開口部を通って延びられるよう相互に重なり合う(overlap)。使用時、該アームは該サポートベースに回転可能(rotatably)に結合され、該第1及び第2サポートアームの相互に対する運動は、該サポートベースに対し該キャリッジを動かす。又、該サポートベースに対し該第1及び第2サポートアームを個別に動かすために、該第1及び第2アームの各々は、その上に形成されモーターに結合するよう適合されたドライブソケットを有する。オプションで、該モーターは該デバイスが画像形成用装置と同時に使われることを可能にするために遠隔式に駆動されるよう構成されることも可能である。
【0006】
該キャリッジは種々の構成を有し得るが、1実施例では、それは該通路を通って延びるツールと契合するためにその上にスライド可能に配置され、スライド可能に動くよう適合された契合機構(engagement mechanism)を有することが出来る。該契合機構はその中に形成され、該通路を通って延びるツールを座らせるよう適合された、カットアウト(cut−out)の様な開口部を有し得る。該カットアウトは好ましくは該ツールを予め決定された位置内に入らせるよう構成されるのがよい。又該キャリッジは、それに回転可能に結合され、該キャリッジ内に形成されたトラック内で該契合機構をスライドさせるため回転するよう適合されたドライバー(driver)を有する。1実施例では、該ドライバーは、該通路を通してツールをドライブするため回転するよう適合された少なくとも1つのローラー(roller)を有する。或る例示的実施例では、該ドライバーは、ローラーを回転させるためのモーターと結合するよう適合された能動的ローラー(active roller)と、受動的ローラー(passive roller)と、を有する。該能動的ローラーは該キャリッジに結合されるが、該受動的ローラーは、該キャリッジ上にスライド可能に配置され、該通路を通って延びるツールに契合するようスライド可能(slidably)に動くよう適合された契合機構に結合される。
【0007】
又、患者の様な対象内にツールをガイドし、挿入する方法が提供されるが、該方法は、1つの例示的実施例では、ガイドシステムが目標手術サイト上に位置付けられるよう、組織表面上にガイドシステムを位置付ける過程と、該ガイドシステムの視認窓を通してツールを位置付ける過程と、を具備する。1例示的実施例では、該ツールは該ツールの遠位の部分を組織内に貫入(penetrating)させることにより位置付けられる。又該方法は、該視認窓内に位置付けられた該ツールと契合するよう該ガイドシステムを駆動する過程と、該ガイドシステムと目標手術サイトの画像を視認しながら、該ツールの軌跡を調整するよう該ガイドシステムを駆動する過程と、該ツールを組織内へ、そして目標手術サイトの方へ進めるために該ガイドシステム上のドライバー機構(driver mechanism)を駆動する過程と、を具備する。例示的実施例では、該ガイドシステムのサポートベースに旋回可能に結合された少なくとも1つのアームを旋回させることにより、該ツールの軌跡を調整するよう駆動(actuated)される。該アーム(複数を含む)は、その上に設置され、それを通して延びる視認窓を規定するキャリッジを有する。もう1つの例示的実施例では、該ツールは、該キャリッジ上に配置された契合機構を閉じた位置へスライド式に動かすことにより契合される。該ツールは契合位置で能動的ローラーと受動的ローラーの間に位置付けられ、該能動的ローラーは該ツールを進めるよう駆動される。もう1つの実施例では、該ガイドシステムと目標手術サイトの画像がコンピュータトモグラフィーを使って視認され、該ガイドシステムとドライバー機構は、遠隔式に、すなわち、該デバイスから或る距離離れて、同時に駆動され得る。
【実施例1】
【0008】
ここで開示されるデバイスと方法の、構造、機能、製造法そして使用法の原理の全般的理解を提供するために、或る例示的実施例が今説明される。これらの実施例の1つ以上の例は付随する図面で図解される。当業者は、ここで特定して説明され、付随の図面で図解されるデバイスと方法が、限定しない例示的実施例であり、本発明の範囲は請求項によっ
てのみ規定されることを、理解するであろう。1つの例示的実施例と連携して図解され、説明される特徴は他の実施例の特徴と組み合わされてもよい。この様な修正と変型は本発明の範囲内に含まれるよう意図されている。
【0009】
本発明は、生検デバイス(biopsy device)、近接照射療法(brachytherapy)デバイス、コンピュータチップ(computer chip)、ワイヤ(wires)、又は腫瘍摘除(lumpectomy)デバイスの様なツールを、組織内にガイド、挿入するための方法とデバイスを提供する。1例示的実施例では、ツールの挿入軌跡を調整し、望ましい貫入深さまで組織内へ該ツールを進めるよう、遠隔制御されることが出来るガイド及び挿入デバイスが提供される。該デバイスは、目標手術サイトに対して位置付けられる該デバイスを同時に見ながら、該デバイスとツールが操作されることを可能にするよう、コンピューテッドトモグラフィー(computed tomography){シーテー(CT)}、核磁気共鳴画像形成(magnetic resonance imaging){エムアールアイ(MRI)}、X線蛍光透視法(X−ray fluoroscopy)、又は超音波(ultrasound)の様な、画像形成方法(imaging method)と共に使用するよう構成される。又該デバイスは、呼吸胸部運動(respiratory chest motion)を受動的に補償(compensate)するように、直接患者上に位置付けられるよう構成され、針又は何等かの他のツールの振動(oscillation)を受動的に補償する特徴を有する。他の例示的実施例では、該デバイスは全部を使い捨て可能(disposable)にすることが出来る。
【0010】
図1A−1Cは、ツールを組織内へガイド、挿入するためのガイド及び挿入デバイス10の1つの例示的実施例を図解する。一般に、該デバイス10は組織表面上に位置付けられるよう適合されたサポートベース20を有する。第1及び第2サポートアーム30,32は該サポートベース20に可動式に結合され、各アーム30,32はそれを通して形成された開口部30a、32aを有する。又該デバイス10は、該第1及び第2サポートアーム30,32に可動式に結合されたキャリッジ組立体40を有する。該キャリッジ40は、ツールを受けるための、ここで視認窓52(図1B)と呼ばれる、通路を規定するキャリッジ50と、該視認窓52を通って延びるツールと契合するよう構成された契合機構60と、該視認窓52を通るよう該ツールをドライブするためのドライバー機構70と、を有する。使用時、該ガイド及び挿入デバイス10は患者の組織表面上に位置付けられ、ツール(示されてない)は該キャリッジ50内の該視認窓52を通るよう位置付けられる。該契合機構60は該ツールと契合するために開いた位置(図1B)から閉じた位置(図1C)へ動かされ、第1及び第2アーム30,32は該サポートベース20に対し動かされ、それにより該キャリッジ50とそれを通るよう延びる該ツールの位置を調整する。該デバイス、ツールそして目標組織サイトの画像は、該キャリッジ50と従って該ツール挿入軌跡の位置付けを容易にするために、同時に使われる。一旦該ツールが適切に位置付けられると、該ツールを望ましい貫入深さまで組織内へドライブするために該ドライバー機構70が駆動される。該ツールの適切な深さまでの挿入を同時に見て実現するために画像形成が同様に使われる。例示的実施例では、該デバイス10は生検プローブ又は針を、腫瘍(tumor)の様な目標手術サイトへガイドし、挿入するため使われる。しかしながら、当業者は該デバイスが種々のツールをガイド及び挿入するため使われることを評価するであろう。
【0011】
該デバイスのサポートベース20は種々の構成、形状そして寸法を有し得るが、それが患者の組織表面上に位置付けられ、キャリッジ組立体40をサポートするための安定な足場(footing)を提供するよう適合されるのが好ましい。図2でより詳細に示される様に、図解された実施例では、該サポートベース20はそれを通るよう形成された開口部22を伴う概ね平面状で、円形の形状を有する。該開口部22は目標組織サイトへのア
クセスを提供するよう構成され、かくしてそれはそれを通してツールを受けるのに充分な寸法と形状を有するのが好ましい。当業者は、該サポートベース20とそれを通るよう形成される開口部22が種々の他の形状と寸法を有し得ることを評価するであろう。例えば、該サポートベース20及び/又は開口部は正方形、楕円形、長方形、三角形、他とすることが出来る。又サポートベース20は患者の身体、又は種々の器官の輪郭にマッチするよう形作られても良い。例えば、該サポートベース20は、患者の身体上の特定の場所への位置付けを容易にするために実質的に凹面又は凸面とすることが出来る。他の実施例では、該サポートベースは2つの部品、下方及び標準化された上方の部分から成り、そこでは該下方部分は1つの範囲のパーツ(parts)を有し、各パーツは患者の身体の特定部分の輪郭にマッチするよう形作られ、該標準化された上方部分は該種々の下方部分パーつの何れかに嵌合するよう適合される。
【0012】
又該サポートベース20は、該サポートベース20を組織表面に固定するために、孔(holes)、スロット、タブ(tabs)又は接着性スチッカー(adhesive stickers)、他の様な1つ以上の固定機構又はフィーチャー(one or more securing mechanisms or features)を有する。図2に示す様に、該サポートベース20はその回りに配置された4つのタブ24a、24b、24c、24dを有する。該タブ24a−dは該サポートベース20を組織表面に止める(tape)よう使われる。代わりに、又は加えて、該タブ24a−dは該サポートベース20を患者上に固定するストラップ又は他の要素を受けるためにその中に形成されたスロット25a、25b、25c、25dを有する。4つのタブが示されるが、該サポートベース20はどんな数のタブを有することも出来て、そして/又は、それは組織表面に該サポートベース20を一時的に固定する種々の他のフイーチャー(features)を有することも出来る。
【0013】
上記で示した様に、該サポートベース20は好ましくは該キャリッジ組立体40をサポートするよう構成されるのがよい。例示的実施例では、該キャリッジ組立体40は第1及び第2アーム30,32により該サポートベース20に可動式に結合される。従って、該サポートベース20は該第1及び第2アーム30,32を該サポートベース20に嵌合させるためのフイーチャを有する。図2に示す様に、該サポートベース20は、該第1サポートアーム30を受けるために該サポートベース20の相対する側から延び、該側に位置付けられた第1対の嵌合要素(mating elements)26a、26bと、該第2サポートアーム32を受けるために該サポートベース20の相対する側から延び、該側に位置付けられた第2対の嵌合要素28a、28bと、を有する。各嵌合要素26a、26b、28a、28bの形状は下記で更に詳述する該第1及び第2アーム30,32の形状により変わるが、1つの例示的実施例では該第1及び第2対の嵌合要素26a、26b、28a、28bは該サポートアーム30,32を該サポートベース20に旋回式(pivotally)に嵌合させるよう構成される。これは、例えば、ピンとボアの結合(pin and bore connection)を使って達成出来る。図2に示す様に、各嵌合要素26a,26b,28a、28bは、該第1及び第2アーム30,32上に形成された対応するピンを受けるためにその中に形成されたボアを有する直立したタブの形である(2つのボア26c、28cのみが示されている)。又各嵌合要素26a,26b,28a、28cの位置は相互に対する該第1及び第2アーム30,32の望ましい位置により変わる。例示的実施例では、示される様に、該第1対の嵌合要素26a、26bは第2対の嵌合要素28a、28bから90°オフセットされて位置付けられ、かくして該嵌合要素26a,26b,28a、28bは該サポートベース20の周囲に等間隔で隔てられている。結果として、第1及び第2アーム30,32が該嵌合要素26a,26b,28a、28bと嵌合すると、該アーム30,32は、それらが相互に交叉するよう相互に対し実質的に横断するよう延びる。
【0014】
更に図2に示す様に、2つの嵌合要素、例えば、嵌合要素26bと28bは、下記で詳述する様に、モーターを該第1及び第2アーム30,32に結合するために、その上に形成された結合要素26d、28dをオプションで有することが出来る。各結合要素26d、28dは種々の形状を有することが出来て、その特定の形状は、該サポートベース20に対し該第1及び第2アーム30,32を回転するために使われるモーターの形状により変わってもよい。図解された実施例では、各結合要素26d、28dは単に円柱形のハウジング又はソケットであり、それはモーター上のドライバーを受けるためにそれを通して延びる開口部と、その外面に形成され、該モーターと契合し、その回転を防止するよう構成されたバンドと、を有する。各結合要素26d、28dの該開口部は、該モーター上のドライバーが該結合要素26d、28dを通して延び、下記で詳述する様に、該第1及び第2アーム30,32上に形成されたドライブソケットと嵌合することを可能にするために、嵌合要素26b、28b内に形成された開口部と整合されるのが好ましい。当業者は、1つ以上のモーターを該デバイス10に結合するため種々の技術が使われ得ること、又は代わりに該モーター(複数を含む)が該デバイス上に一体に形成されたり、又は該デバイス内にビルトインされ、かくして何等かの結合要素のニーヅも取り除き得ることを評価するであろう。しかしながら、外部モーターの使用は、決して患者に接しないモーターが該デバイスからアンクリップ(unclipped)されることを可能にする。その時該デバイスは捨てられ(discarded)得る。
【0015】
又該第1及び第2アーム30,32は種々の形状を有し得るが、1つの例示的実施例では、該アーム30,32は該サポートベース20に旋回可能()に結合されるよう構成され、それらは該サポートベース20上に或る距離で該キャリッジ組立体40を保持し、位置付けるよう適合される。図3は該アーム30の1つをもっと詳細に図解する。示される様に、該アーム30は、該サポートベース20上で該嵌合要素、例えば、要素28a、28bに嵌合するよう適合された相対する端部32a、32bを有する概ね円弧状の形状を備える。前に論じた様に、例示的実施例では、サポートベース20上で該アームを結合要素26a,26b,28a、28bと嵌合させるために、ピンとボアの結合(pin and bore connection)が使われる。図3に示す様に、該アーム30の該第1及び第2端部32a、32bは各々、その上に形成され、サポートベース20上の嵌合要素28a、28b内に形成されたボア(図2では1つのボア28cのみが示される)内に延びるよう適合されたピン34a、34bを有する。該第2アーム32は該第1アーム30と同様な形状を有する。
【0016】
上記で示した様に、該嵌合要素の2つ、例えば、嵌合要素26b、28bはモーターとの嵌合用の結合要素26d、28dを有する。従って、各アーム30,32上のピンの1つは該結合要素に結合されたモーター上のドライバーを受けるために中に形成されたドライブソケット(drive socket)を有する。図3に示す様に、ピン34bはモーター上のドライバーを受けるためにその中に形成されたドライブソケット34cを有する。該ドライブソケット34cは相補的形状(complementary shape)を有するドライバーを受けるために、6角形又は正方形の様な、形状を有してもよい。結果として、該ドライバーが該ソケット34c内に位置付けられると、該ドライバーの回転は該ソケット34cに回転力を印加するのに効果的であり、それにより該アーム30を回転させる。該アーム30,32を回転させる例示的モーターは下記でもっと詳細に論じる。
【0017】
又、各アーム30,32はその中に形成されたスリット又は開口部を有する。各アーム30,32内の該開口部の形と寸法は種々であるが、例示的実施例では該アーム30,32内の該開口部はそれを通してキャリッジ組立体40の部分を受けるために重ね合わさるよう構成される。この様な構成は、下記でもっと詳細に論じる様に、該アーム30,32が該サポートベース20に対して該キャリッジ組立体40を動かすための2重トラック(double−track)を形成することを可能にする。図3は、その第1及び第2端部32a、32b間でそれを通して延びる細長い開口部30aを有する。該アーム30,32が該サポート20と嵌合すると、図1A−1Cで示す様に、該開口部30a、32aは重なり合い、キャリッジ組立体40の部分はそれらを通って延びる。
【0018】
キャリッジ組立体40は図4Aと4Bで詳細に示され、図示の様に該キャリッジ組立体40は総合的に、ツールを受ける開口部を規定するキャリッジ50と,該キャリッジ50内の該開口部を通って延びるツールと契合する契合機構60と、そして該キャリッジ50内の該開口部を通るようツールをドライブするドライバー機構70と、を有する。当業者は、該キャリッジ組立体40が種々の他の構成を有し、種々の他の技術が組織内へツールと契合し、位置付けそしてドライブするため使われ得ることを評価するであろう。
【0019】
該キャリッジ50は図5A−5Cでもっと詳細に示されるが、図示の様に該キャリッジ50はそこから延びる相対する側壁を有する概ね円弧状の底面を備えるハウジングの形をしている。該キャリッジ50の該円弧状の底面は、該キャリッジ50が、該サポートアームの1つ、例えば、図1A−1Cで示す第1サポートアーム30、に沿ってスライドすることを可能にしており、該側壁は該キャリッジ50が、該キャリッジ50を通って延びるツールと契合するための契合機構60をスライド出来るように受けることを可能にする。更に図5Aと5Bで示す様に、該キャリッジ50はツールを受けるためにその底面を通るよう延びる開口部又は視認窓52を有する。該視認窓52は中空のハウジング54aを通って延びるが、該ハウジングは該キャリッジ50の底面に結合され、該キャリッジ50上の延長部(extension)を形成する。該中空のハウジング54aは該キャリッジ50が該第1及び第2サポートアーム30,32に結合されることを可能にする。特に該ハウジング54aは、該キャリッジ50が該サポートアーム30,32と契合し、その動きに応答して動かされることを可能にするよう、該第1及び第2サポートアーム30,32の開口部30a,32aを通って延びている。該中空ハウジング54aの特殊な形状は、それを通して挿入されるべきツールの寸法と形状のみならず、アーム30,32内の開口部30a、32aの形に依っても変わり得る。例示的実施例では、該ハウジング54aは種々の寸法の種々のツールがそれを通して挿入されることを可能にするに充分な形と寸法を有する。又該ハウジング54aの形状と寸法は好ましくは視認窓52内でツールが旋回することを可能にするよう構成されるのがよく、かくしてツールを概ね直立する位置に緩く保持する、一方該ツールが動かされ、巧みに扱われる(manipulated)ことを可能にする。又視認窓52は該デバイス10が患者内に植え込まれた(implanted)ツール上で除去されることを可能にする寸法を有する。図5Cに示す実施例では、該ハウジング54aは概ね円錐形であり、ツールが旋回可能なよう動ける円錐形の運動範囲を規定する。該円錐形の角度αは望ましい運動範囲と使われる特定のツールとにより変わるが、1つの例示的実施例では、該円錐角度αは10から15°の範囲内にある。
【0020】
更に図5A−5Cに示す様に、該キャリッジ50は又該ハウジング54aの終端部(terminal end)の周りに形成されたフランジ54bを有する。該フランジ54bはサポートアーム30,32上に該キャリッジ50を保持又はロックするよう構成され、該デバイスの使用中、偶然に契合が外れる(disengagement)ことを防止する。又該フランジ54bは該キャリッジ50が容易に分解され、もし望むならサポートアーム30,32から除去されることを可能にする形状を有する。図5Aと5Cで示す様に、該フランジ54bは実質的に長方形である。この様な形状は、開口部30a、32aが相互に整合された時、該フランジ54bがサポートアーム30,32の開口部30a、32aを通して或る角度で挿入されることを可能にして、そして次いで、該アームの1つ、例えば、第2アーム32は、該キャリッジ50を該アーム30,32上にロックするよう90°回転されることが可能である。次いで該アーム30,32は僅かに圧縮され、該サポートベース20上で該第1及び第2対の嵌合要素26a、26b,28a、28b間でスナップ(snapped)される。
【0021】
又該キャリッジ50は該サポートアーム30,32に対し該キャリッジ50の位置付けを容易にするためその下方の面又は底面上に形成されるレール50a、50bを有する。特に、該キャリッジ50は該アームの1つ、例えば、第1アーム30上に休止するよう構成されるのが好ましい。該レール50a、50bは該キャリッジ50の底面に沿って延び、それらは第1アーム30内又は第1アーム30付近の開口部30a内に位置付けられるよう構成される。該レール50a、50bは該第1アーム30に対する該キャリッジ50の回転を防止し、それにより該キャリッジ50が外れることを防止する。又該レール50a、50bは該第1アーム30に沿う該キャリッジ50のスライド運動を容易にする。
【0022】
更に図5Aと5Cで示す様に、該キャリッジ50は更に、該契合機構60をスライド可能に受けるためにその中に形成されたトラック58a、58bを有するが、該機構は該キャリッジ50内の視認窓52を通って延びるツールと契合するよう適合されている。図解されたトラック58a、58bは、該キャリッジ50の内部側壁に沿って延び、該契合機構60をスライド可能に座らせるための溝(groove)を規定する、相対したレールの形をしている。
【0023】
又該キャリッジ50は、下記で論じる様に、モーターを、契合機構60移動用ドライバー80とツール前進用ドライバー70と、に嵌合させるために、第1及び第2結合要素56a、56bの様な、他のフイーチャ(features)を有する。該第1及び第2結合要素56a、56bはサポートベース20上の結合要素26d、28dと同様であり、特に、それらはモーター上のドライバーを受けるためにそれを通って延びるボアを有する実質的に円柱形のハウジングの形とすることが出来る。
【0024】
例示する契合機構60が図6に詳細に示され、図示の様にそれは円弧形のプロフアイルを有する概ね細長い形を備える。該円弧形は該契合機構60が、該キャリッジ50内に形成されたトラック58a、58b内にスライド可能に座り、該契合機構60が該視認窓52へのアクセスを提供するため該視認窓52から或る距離離れ隔てられる開き位置(図1Bに示す)と、該契合機構60が該視認窓52を通って延びるツールと契合するために該視認窓52上に延びる閉じ位置(図1Cに示す)と、の間を動くことを可能にする。該視認窓52を通って延びるツールとの契合を容易にするため、該契合機構60は中に形成され、ツールを受けるよう適合されたカットアウト(cut−out)62を有する。該カットアウト62は種々の形と寸法を有してもよいが、1つの例示的実施例では、図6に示す様に、該カットアウトは実質的に3角形である。この様な形は、該カットアウト62が針の様なツールを該カットアウト62との水平整合へ促すことを可能にする。
【0025】
上記説明の様に、該契合機構60は好ましくは開き位置と閉じ位置の間で移動可能であるのがよい。該契合機構60のスライド可能な運動は種々の技術を使って達成されるが、1つの例示的実施例では、該キャリッジ50は、その上に形成され、該キャリッジ50内に形成されたトラック58a、58b内で該契合機構60をスライドさせるのに適合したドライバー80を有する。1つの例示用ドライバー80が図4Aと4Bで示されるが、図示の様に、該ドライバー80はその上に形成された歯(teeth)又はギヤ(gear)82を有するシャフトの形をしている。該ギヤ82は該契合機構60の表面上に形成された対応する歯又はギヤ、すなわちラック(rack)64と嵌合するよう構成される。結果として、第1方向の該ドライバー80の回転は、該キャリッジ50内で第1方向に該契合機構60をスライドさせるのに有効であり、反対方向の該ドライバー80の回転は該キャリッジ50内で第2の、反対の方向に該契合機構60をスライドさせるのに有効であり、それにより該開き位置と閉じ位置の間で該契合機構60を動かすことになる。該ドライバー80は、下記で詳細に説明する様にモーターを使って回転させられる。好ましくは、該ドライバー80の相対する端部80a、80bは、該キャリッジ50内に形成される相対する開口部55a、55b内に回転可能に位置付けられるよう構成される。該端部の1つ、例えば、端部80bはモーター上のドライバーを受けるためにその中に形成されたドライブソケット(drive socket)を有する。該ドライブソケットは図3に関連して前に説明したドライブソケット34cと同様である。使用時、該ドライバー80がキャリッジ50と結合されると、モーターは、モーター上のドライバーが該結合要素56aを通るよう位置付けられ、該ドライバー80上の該ドライブソケットと結合されることを可能にするよう、該結合要素56aに結合される。該モーターの駆動は該ドライバーを回転させ、それにより該契合機構60を動かすよう該ドライブソケット、ひいては該ドライバー80を回転させる。
【0026】
前に説明した様に、該キャリッジ組立体40は又、視認窓52を通り組織内へツールをドライブするドライバー70を有する。図4A及び4Bはドライバー70の1つの例示的実施例を図解するが、該ドライバーは、該契合機構60と嵌合する受動的ローラー74と、該キャリッジ50と嵌合する能動的ローラー76と、を有する。該能動的ローラー76はツールを該視認窓52を通してドライブするためドライバーにより回転されるよう構成され、該受動的ローラー74は、下記で論じられる様に、それに対する該ツールの運動の結果として回転するよう構成される。該ローラー74,76は種々の技術を使って該契合機構60とキャリッジ50の上に設置され得るが、例示的実施例では各ローラー74,76は、対応する開口部又はボア内で受けられるよう構成された相対する端部を有する。特に、該能動的ローラー76は、該キャリッジ50の相対する側壁内に形成された対応するボア57a、57b内に延びる相対する端部76a、76bを有する。該受動的ローラー74は該契合機構60内に形成された対応するボア67a、67b内に延びる相対する端部74a、74bを有する。図4B及び6に示す該ボア67a、67bは、該契合機構60の面上に形成され、そこから延びる相対するアーム66a、66b内に形成される。該相対するアーム66a、66bは、該契合機構60が閉じた位置にある時、該受動的ローラー74が該ドライブローラー76に隣接して位置付けられることが出来るよう、該カットアウト62に隣接して位置付けられる。結果として、該視認窓52を通して延びるツールは該受動的及び能動的ローラー74,76の間に契合される。
【0027】
該ドライバー70を駆動するために、該能動的ローラー76の1端、例えば、76bは中に形成されたソケットを有し、モーター上のドライバーを受けるよう構成される。該ソケットは図3に関連して前に説明されたソケット34cと同様である。使用時、該能動的ローラー76が該キャリッジ50と結合されると、モーターは、該モーター上のドライバーが該結合要素を通り、該ドライブローラー76内により形成されたソケット内に延びるよう、該結合要素56bと嵌合する。結果として、該モーターが駆動されると、該ドライバーは該ソケットを回転させるよう回転し、それにより該ドライブローラー76を回転させる。該ドライブローラー76はかくして、該ドライブローラー76と該受動的ローラー74の間に位置付けられたツールを、組織内へ進ませる。又該ドライブローラー76は該ツールを組織から引き込める(retract)ために、逆方向にドライブされ得る。図7は、生検針90の形で、それを通して延びる、ツールを有するデバイス10を図解する。示される様に、該ツール90が該契合機構60内の該カットアウト部分内に位置付けられ、そして該受動的及び能動的ローラー74,76の間に契合されるように、該契合機構60は閉じた位置に移る。
【0028】
ツールの動きを容易にするため、該ドライブローラー及び/又は受動的ローラー74,76は、その少なくとも1部分の周りに配置された、ゴム(rubber)の様な、保護部材をオプションで有する。該保護部材は該ローラー(複数を含む)74,76間の接触応力(contact stresses)を減じるために有効であり、それは該ツールが組織内へ又は組織から外へドライブされる時該ローラー(複数を含む)74,76間の
トラクション(traction)を改良する。
【0029】
上記で示す様に、モーターは該アーム30,32を該サポートベース20に対し回転されるために使われ、それによりキャリッジ組立体40内の該視認窓52を望まれる配向にに位置付ける。又モーターは該キャリッジ50内で該契合機構60をスライドさせるために使われ、それにより該視認窓52を通って延びるツールと契合しそして契合を外す。モーターは更に、該視認窓を通って延び、契合機構60内で該能動的ローラー76と受動的ローラー74の間に契合されるツールを、進ませそして引き込ませるために該能動的ローラー76を回転させるよう使われる。例示的実施例では、アーム30,32の運動、該契合機構60の運動、そしてツールを進めそして引き込めるドライバーの駆動、を制御するために、各モーターが個別に駆動されることを可能にするために、別々のモーターが各結合要素26d,28d,56a、56bと取り外し可能に嵌合するよう構成される。この様な取り外し可能な結合は、それが全デバイス10がポリマーの様な使い捨て可能な材料(disposable material)で形成されることを可能にするので、特に有利である。患者の皮膚に接触しない該モーターは、使用後該デバイス10から簡単に取り外され得て、該デバイス10は捨てられることが可能である。
【0030】
課題の各々を行うために種々の種類のモーターが使われ得るが、使われ得る1つの例示的タイプのモーターはステップモーターであり、該ステップモーターはデジタルのパルス入力をインクレメンタル(incremental)なシャフト回転に機械的に変換する電磁的回転アクチュエーター(electromagnetic, rotary actuator)である。適当なロジックを用いると、ステップモーターは双方向で、同期性を有し、急速な加速、停止そして逆進(reversal)を提供し、そして他のデジタル機構と容易にインターフエース(interface)する。結果として、モーターは各運動の精確で精密な制御を許容する。1つの例示的ステップモーターは、遊星ギヤヘッド(planetary gear head)と256:1の減速比(reduction)を有するシリースエイエム1020モーター(series AM 1020 Motor)である。該モーターのステップ角は18°で、かくして0.07°の角度位置分解能(angular position resolution)が得られることを可能にする。又該モーターは、約360°/sの速度で該アーム30,32を動かすことにより該視認窓52内にツールを位置付けられるよう配向し、約20mm/sの速度で組織内にツールをドライブする、能力を有する。他の実施例では、該ドライバーを駆動し、該アームを回転させるために直流モーター(DC motor)、油圧(hydraulics)、バッテリー電力(battery power)、又は他の技術が使われ得る。
【0031】
もう1つの実施例では、該デバイス10は、該サポートベース20,サポートアーム30,32,及び/又はキャリッジ組立体40、の中にマーカー(markers)を有することが出来る。該マーカーは、例えば、患者、目標手術サイト、デバイス、及び/又は画像形成装置を含む座標システム(coordinate system)内の基準点(reference points)を創るために、該マーカーが患者の画像内で見られることを可能にするよう、放射線不透過性(radiopaque)材料で形成される。該基準点は該目標手術サイトへ該ツールを自動的に向ける(automatic targeting)ことを容易化するため使われる。例えば、該デバイス10は、サポートベース20内に、シーテー(CT)画像内に現れる金属部品を含み、ツールを目標手術サイトへ挿入するために、当業者が該デバイス10用の正しい入力パラメーターを計算することを可能にする。
【0032】
図8A−8Gは該デバイス10を使う例示的方法を図解する。該デバイス10は種々のツールを組織内へガイド及び挿入するため使われるが、1つの例示的実施例では、該デバ
イス10は分析用サンプルを取り除くために組織内へ生検針をガイド及び挿入するため使われる。該デバイス10は腫瘍(tumor)の様な目標手術サイト上の場所で患者の組織表面(示されてない)上に直接位置付けられる。該デバイス10が患者の上に位置付けられるので、該デバイスは、患者と共に、例えば、呼吸時の患者の胸部(chest)の上下(rise and fall)と共に、動く。モーターは、前記論議の様に、該デバイス10上の各結合要素26d,28d,56a、56bに結合される。該モーターは制御ボックス(control box)に接続されるが、該ボックスは今度は該モーターが遠隔から駆動されることを可能にするようコンピュータに接続される。該デバイス10は該サポートベース20上のタブ24a、24b、24c、24dとストラップ(straps)、接着剤(adhesives)、他を使って患者に固定(secured)される。一旦該デバイス10が固定されると、生検針90は、図8Aに示すように、該キャリッジ組立体40内の視認窓52を通して位置付けられる。契合機構60は該視認窓52へのアクセスを提供するよう開いた位置にある。次いで針90の遠位の先端が挿入点に位置付けられ、それは組織内へ少なくとも部分的に貫入させられる。この位置で、図8Bに示す様に、針90は視認窓52内で自由に旋回することが出来る。
【0033】
例示的実施例では、該デバイス10は、コンピューテッドトモグラフィー(computed tomography){シーテー(CT)}、核磁気共鳴画像形成法(magnetic resonance imaging){エムアールアイ(MRI)}、超音波、X線、X線蛍光透視法(X−ray fluoroscopy)、他の様な、画像形成の方法及びシステムと共に使われる。該デバイス10はプラスチックの様な非金属材料で形成されるので、該デバイス10は画像と干渉せず、それは、例えば、シーテー又はエムアールアイ機械の制限(confines)内に適合(fit)するよう寸法決めされ得る。ピエゾ電気モーター(piezoelectric motor)の様なエムアールアイ適合性のモーター(MRI−compatible motors)を有するプラスチックデバイスがエムアールアイ機械の強い磁気的環境内で安全に使われ得る。一旦患者の上に位置付けられると、オペレーターはその部屋を出て該モーターを制御するコンピュータを含む制御室から遠隔式に該デバイスを操作出来る。患者は該デバイス10で走査され、針90が患者上に位置付けられ、画像が見られる。同時に画像を見ながら、ユーザーは直観的インターフエース(intuitive interface)を通して遠隔式に該針の挿入の角度と深さを制御出来る。図8Cで示す様に、契合機構60と結合されたモーターはドライバー80を回転させるよう駆動され、それにより該契合機構を閉じた位置へスライドさせる。これは該契合機構60上の該カットアウト部分に該カットアウト部分を用いて該針90と契合させ、それを配向させ、そして該針90を受動的及び能動的ローラー74,76の間に位置付けさせる。該契合機構90を閉じる前か、又は後か、何れかに、第1及び第2アーム30,32の各々に取り付けられたモーターは、該サポートベース20に対する望ましい角度の配向へ、該第1及び第2アーム30,32を回転させるため個別に駆動される。該第1及び第2アーム30,32が該サポートベース20に対して旋回すると、該キャリッジ組立体40は、図8Dに示す様に、動き、それにより針90を望ましい角度配向に位置付ける。該針の特定の角度の配向は画像形成装置を使って確認され、もし必要なら、該アーム30,32は、望ましい角度の配向が達成されるまで、更に該キャリッジ組立体40そして該針90を位置付けし直すため動かされる。
【0034】
一旦該針90が望ましい挿入角度で適切に配向されると、該能動的ローラー76に結合されたモーターは能動的ローラー76を回転させるよう駆動され、それにより、図8Eに示す様に、針90を組織内へドライブする。該モーターは、画像形成装置を使って視認され得る挿入の速度及び/又は深さを制御するため使われる。該デバイスは、モーターへの異常トルク負荷をアセスするため、そして該トルク負荷が予め決められた負荷を越えた時針挿入を停止するために、オプションでフイードバック(feedback)を有してもよい。又挿入深さは、該針の挿入深さを制限するために該針90上に形成された停止部を
使って制御されることも可能である。例えば、該針90の近位の部分はその周りに配置され、該受動的及び能動的ローラー74,76に対し突き当たるよう構成された、フランジを有してもよい。又深さ停止部として機能するクランプも使われ得る。他の実施例では、目標手術サイトに対して針を視認することを容易にするため、カメラ又は他の画像形成機構が該デバイス又は針上に直接設置されることも出来る。又オプションとして、該針90は挿入深さを示すためにその上に形成された深さマーキングを有してもよい。
【0035】
目標手術サイトから組織サンプルを得るため針90が完全に挿入された後、オプションで該能動的ローラー76を反対方向に回転させるためドライバーが駆動され、それにより該針90は組織から取り除かれる。代わりに、該針90が展開された儘残り、図8F及び8Gに示す様に、外科医(surgeon)が該針90を取り除くことが出来るよう、該契合機構60は開いた位置へ動かされ得る。これは、該針90が該デバイス10により緩やかに保持され、患者内になお貫入された儘である時、特に有利である。該針90はかくして患者又は何等かの内部器官と共に動くことが出来て、かくして内部組織又は器官を損傷する危険が減じられる。又オプションでは、該デバイス10は、該針90が該針90上でデバイス10をスライドさせることにより患者から取り除かれる前に、取り除かれることも可能である。当業者は該過程が事実上どんな順序で行われてもよく、行われる手順(procedure)により変わってもよいことは評価するであろう。
【0036】
前に示した様に、該針90の位置付けを制御するために、画像形成装置及び該デバイス10と連携してオプションでソフトウエアインターフエースが使われ得る。例えば、該ソフトウエアは、挿入角度を受信し、その位置を得るよう該デバイスに命令(command)するよう構成されてもよい。代わりに、該ソフトウエアは、挿入角度を決定し、その角度を得るよう該デバイスに命令するよう構成されてもよい。又該ツールが5°の様なインクレメントで動かされることを可能にする、小さな”ジョグ(jogs)”も可能である。ユーザーの入力は望まれる回転と速度に変換され、該制御器へ送られ、該制御器は今度は個別モータードライバーへステップ命令(step commands)を送る。針挿入深さは同様に制御され得る。他の実施例では、該デバイス10は該デバイスを駆動するためジョイスチック(joystick)又はワンド(wand)を有することが出来る。
【0037】
当業者は、上記説明の実施例に基づき本発明の更に進んだ特徴と利点を評価するであろう。従って、本発明は、付随する請求項に示されたものを除けば、特定して示され、説明されたものにより限定されるべきでない。ここで引用された全ての刊行物と引用文献はそれらの全体での引用によりここに明示的に組み入れられる。
【図面の簡単な説明】
【0038】
本発明は付随する図面と連携して行われる付記詳細説明から完全に理解されよう。
【図1A】ガイド及び挿入デバイスの1例示的実施例の斜視図である。
【図1B】開いた位置の契合機構を示す、図1Aのガイド及び挿入デバイスの平面図である。
【図1C】閉じた位置の契合機構を示す、図1Aのガイド及び挿入デバイス平面図を示す。
【図2】図1A−1Cのガイド及び挿入デバイスのサポートベースの斜視図である。
【図3】図1A−1Cのガイド及び挿入デバイスのサポートアームの斜視図である。
【図4A】図1A−1Cのガイド及び挿入デバイスのキャリッジ組立体の斜視図であり、キャリッジ、契合機構及びドライバーを示す。
【図4B】図4Aに示すキャリッジ組立体の組立分解図である。
【図5A】図4A及び4Bに示すキャリッジの斜視図である。
【図5B】図5Aに示すキャリッジの底面図である。
【図5C】図5A及び5Bに示すキャリッジの断面図である。
【図6】図4A及び4Bに示す契合機構の斜視図である。
【図7】図1A−1Cのガイド及び挿入デバイスの断面図である。
【図8A】ガイド及び挿入システムの側面図であり、図1A−1Cのガイド及び挿入デバイスと、該デバイス内に形成された視認窓を通るよう位置付けられた針と、を示す。
【図8B】図8Aに示すガイド及び挿入システムの斜視図であり、針の移動を可能にする視認窓を示す。
【図8C】針と契合するために閉じた位置へ動かされたスライドする契合機構を有する図8A−8Bのガイド及び挿入システムを示す斜視図である。
【図8D】該デバイスのキャリッジを動かし、それにより針の挿入軌跡を調整するよう、旋回された該デバイスの第1及び第2アームを有する、図8Cのガイド及び挿入システムを示す平面図である。
【図8E】該ガイド及び挿入デバイス上のドライバー機構により進められた針を有する図8Dのガイド及び挿入システムを示す平面図である。
【図8F】該針をリリースするため開き位置へ動かされた契合機構を有する図8Eのガイド及び挿入システムを示す平面図である。
【図8G】図8Fに示すガイド及び挿入システムの斜視図である。
【特許請求の範囲】
【請求項1】
ガイド及び挿入システムに於いて、該システムが、
組織表面上に置かれるよう適合されたサポートベースと、
該サポートベース上に可動式に設置され、ツールを受けるためそれを通る視認窓を規定するキャリッジと、そして
該キャリッジに結合され、そして該視認窓を通り該サポートベースの下に位置付けられた組織内へツールをドライブするよう適合された、ドライバーと、を具備することを特徴とする該システム。
【請求項2】
該キャリッジが、該サポートベースに可動式に結合された第1及び第2サポートアームにより該サポートベースに可動式に設置されることを特徴とする請求項1の該システム。
【請求項3】
更に、該第1サポートアーム上に形成され、該サポートベースに対し該第1サポートアームを動かすためにモーターに結合するよう適合された第1ドライブソケットと、該第2サポートアーム上に形成され、該サポートベースに対し該第2サポートアームを動かすためにモーターに結合するよう適合された第2ドライブソケットと、具備することを特徴とする請求項2の該システム。
【請求項4】
該第1及び第2サポートアームが該サポートベースに回転可能に結合されることを特徴とする請求項2の該システム。
【請求項5】
該第1サポートアームが該第2サポートアームを実質的に横断して延びることを特徴とする請求項2の該システム。
【請求項6】
該第1及び第2サポートアームは各々が中に形成された開口部を有し、該キャリッジの部分が、該第1及び第2サポートアームの相互に対する運動が該サポートベースに対して該キャリッジを動かすために有効であるよう、該第1及び第2サポートアーム内の該開口部を通って延びることを特徴とする請求項2の該システム。
【請求項7】
各サポートアームが実質的に円弧状の形状を有しており、該第1及び第2サポートアームが、該開口部が該キャリッジの部分を受けるため重なり合うよう、相互に対し実質的に横断して延びることを特徴とする請求項6の該システム。
【請求項8】
該キャリッジがその上にスライド可能に配置され、該視認窓を通って延びるツールと契合するようスライド可能に動くよう適合された契合機構を有することを特徴とする請求項1の該システム。
【請求項9】
該契合機構は、その中に形成され、該視認窓を通って延びるツールを座らせるよう適合されたカットアウトを有しており、該カットアウトは該ツールを予め決められた位置内へ促すよう構成されることを特徴とする請求項8の該システム。
【請求項10】
更に、該キャリッジに回転可能に結合され、該キャリッジ内に形成されたトラック内で該契合機構をスライドさせるために回転するよう適合されたドライバーを具備することを特徴とする請求項8の該システム。
【請求項11】
該ドライバーが該視認窓を通るようツールをドライブするために回転するよう適合された少なくとも1つのローラーを有することを特徴とする請求項1の該システム。
【請求項12】
該少なくとも1つのローラーは、該ローラーを回転させるモーターと結合するよう適合
された能動的ローラーと、受動的ローラーと、を有しており、該能動的及び受動的ローラーは、その間に位置付けられ、該視認窓を通して延びるツールと契合するよう適合されていることを特徴とする請求項11の該システム。
【請求項13】
該能動的ローラーは該キャリッジに結合されており、そして該受動的ローラーは、該キャリッジ上にスライド可能に配置され、該視認窓を通して延びるツールと契合するためスライド可能に動くよう適合された契合機構と結合されることを特徴とする請求項12の該システム。
【請求項14】
該サポートベースは、その上に形成され、該サポートベースの患者への固定を容易にするよう適合された複数の固定機構を有することを特徴とする請求項1の該システム。
【請求項15】
該システムが少なくとも部分的にポリマー材料から形成されることを特徴とする請求項1の該システム。
【請求項16】
ツールを組織内へガイド及び挿入する方法に於いて、該方法が
ガイドシステムを、該ガイドシステムが目標手術サイト上に位置付けられるように、患者の組織表面上に位置付ける過程と、
ツールを該ガイドシステムの視認窓を通るよう位置付ける過程と、
該視認窓内に位置付けられた該ツールと契合するよう該ガイドシステムを駆動する過程と、
該ガイドシステムと該目標手術サイトの画像に基づき該ツールの軌跡を調整するため該ガイドシステムを駆動する過程と、そして
該ツールを組織内へ進めるために該ガイドシステム上のドライバー機構を駆動する過程と、を具備することを特徴とする該方法。
【請求項17】
該ツールを位置付ける過程が更に、該ツールの遠位の部分を組織内へ貫入させる過程を備えることを特徴とする請求項16の該方法。
【請求項18】
該ツールの軌跡を調整するため該ガイドシステムを駆動する過程が、該ガイドシステムのサポートベースに旋回可能に結合された少なくとも1つのアームを旋回させる過程を備えており、該少なくとも1つのアームがその上に設置され、それを通るよう延びる該視認窓を規定するキャリッジを有することを特徴とする請求項16の該方法。
【請求項19】
該ツールと契合する過程が該キャリッジ上に配置された契合機構を閉じた位置へスライド可能に動かす過程を有することを特徴とする請求項18の該方法。
【請求項20】
該ツールが契合位置で能動的ローラーと受動的ローラーの間に位置付けられ、該ツールを進めさせるドライバー機構を駆動する過程が該能動的ローラーを回転させる過程を備えることを特徴とする請求項19の該方法。
【請求項21】
該ガイドシステムと該目標手術サイトの画像がコンピュータトモグラフィーを使って見られることを特徴とする請求項16の該方法。
【請求項22】
該ガイドシステムとドライバー機構が遠隔式に駆動されることを特徴とする請求項16の該方法。
【請求項23】
該ガイドシステムが嵌合要素を使って該組織表面に固定されることを特徴とする請求項16の該方法。
【請求項24】
該組織が目標手術サイトであることを特徴とする請求項16の該方法。
【請求項1】
ガイド及び挿入システムに於いて、該システムが、
組織表面上に置かれるよう適合されたサポートベースと、
該サポートベース上に可動式に設置され、ツールを受けるためそれを通る視認窓を規定するキャリッジと、そして
該キャリッジに結合され、そして該視認窓を通り該サポートベースの下に位置付けられた組織内へツールをドライブするよう適合された、ドライバーと、を具備することを特徴とする該システム。
【請求項2】
該キャリッジが、該サポートベースに可動式に結合された第1及び第2サポートアームにより該サポートベースに可動式に設置されることを特徴とする請求項1の該システム。
【請求項3】
更に、該第1サポートアーム上に形成され、該サポートベースに対し該第1サポートアームを動かすためにモーターに結合するよう適合された第1ドライブソケットと、該第2サポートアーム上に形成され、該サポートベースに対し該第2サポートアームを動かすためにモーターに結合するよう適合された第2ドライブソケットと、具備することを特徴とする請求項2の該システム。
【請求項4】
該第1及び第2サポートアームが該サポートベースに回転可能に結合されることを特徴とする請求項2の該システム。
【請求項5】
該第1サポートアームが該第2サポートアームを実質的に横断して延びることを特徴とする請求項2の該システム。
【請求項6】
該第1及び第2サポートアームは各々が中に形成された開口部を有し、該キャリッジの部分が、該第1及び第2サポートアームの相互に対する運動が該サポートベースに対して該キャリッジを動かすために有効であるよう、該第1及び第2サポートアーム内の該開口部を通って延びることを特徴とする請求項2の該システム。
【請求項7】
各サポートアームが実質的に円弧状の形状を有しており、該第1及び第2サポートアームが、該開口部が該キャリッジの部分を受けるため重なり合うよう、相互に対し実質的に横断して延びることを特徴とする請求項6の該システム。
【請求項8】
該キャリッジがその上にスライド可能に配置され、該視認窓を通って延びるツールと契合するようスライド可能に動くよう適合された契合機構を有することを特徴とする請求項1の該システム。
【請求項9】
該契合機構は、その中に形成され、該視認窓を通って延びるツールを座らせるよう適合されたカットアウトを有しており、該カットアウトは該ツールを予め決められた位置内へ促すよう構成されることを特徴とする請求項8の該システム。
【請求項10】
更に、該キャリッジに回転可能に結合され、該キャリッジ内に形成されたトラック内で該契合機構をスライドさせるために回転するよう適合されたドライバーを具備することを特徴とする請求項8の該システム。
【請求項11】
該ドライバーが該視認窓を通るようツールをドライブするために回転するよう適合された少なくとも1つのローラーを有することを特徴とする請求項1の該システム。
【請求項12】
該少なくとも1つのローラーは、該ローラーを回転させるモーターと結合するよう適合
された能動的ローラーと、受動的ローラーと、を有しており、該能動的及び受動的ローラーは、その間に位置付けられ、該視認窓を通して延びるツールと契合するよう適合されていることを特徴とする請求項11の該システム。
【請求項13】
該能動的ローラーは該キャリッジに結合されており、そして該受動的ローラーは、該キャリッジ上にスライド可能に配置され、該視認窓を通して延びるツールと契合するためスライド可能に動くよう適合された契合機構と結合されることを特徴とする請求項12の該システム。
【請求項14】
該サポートベースは、その上に形成され、該サポートベースの患者への固定を容易にするよう適合された複数の固定機構を有することを特徴とする請求項1の該システム。
【請求項15】
該システムが少なくとも部分的にポリマー材料から形成されることを特徴とする請求項1の該システム。
【請求項16】
ツールを組織内へガイド及び挿入する方法に於いて、該方法が
ガイドシステムを、該ガイドシステムが目標手術サイト上に位置付けられるように、患者の組織表面上に位置付ける過程と、
ツールを該ガイドシステムの視認窓を通るよう位置付ける過程と、
該視認窓内に位置付けられた該ツールと契合するよう該ガイドシステムを駆動する過程と、
該ガイドシステムと該目標手術サイトの画像に基づき該ツールの軌跡を調整するため該ガイドシステムを駆動する過程と、そして
該ツールを組織内へ進めるために該ガイドシステム上のドライバー機構を駆動する過程と、を具備することを特徴とする該方法。
【請求項17】
該ツールを位置付ける過程が更に、該ツールの遠位の部分を組織内へ貫入させる過程を備えることを特徴とする請求項16の該方法。
【請求項18】
該ツールの軌跡を調整するため該ガイドシステムを駆動する過程が、該ガイドシステムのサポートベースに旋回可能に結合された少なくとも1つのアームを旋回させる過程を備えており、該少なくとも1つのアームがその上に設置され、それを通るよう延びる該視認窓を規定するキャリッジを有することを特徴とする請求項16の該方法。
【請求項19】
該ツールと契合する過程が該キャリッジ上に配置された契合機構を閉じた位置へスライド可能に動かす過程を有することを特徴とする請求項18の該方法。
【請求項20】
該ツールが契合位置で能動的ローラーと受動的ローラーの間に位置付けられ、該ツールを進めさせるドライバー機構を駆動する過程が該能動的ローラーを回転させる過程を備えることを特徴とする請求項19の該方法。
【請求項21】
該ガイドシステムと該目標手術サイトの画像がコンピュータトモグラフィーを使って見られることを特徴とする請求項16の該方法。
【請求項22】
該ガイドシステムとドライバー機構が遠隔式に駆動されることを特徴とする請求項16の該方法。
【請求項23】
該ガイドシステムが嵌合要素を使って該組織表面に固定されることを特徴とする請求項16の該方法。
【請求項24】
該組織が目標手術サイトであることを特徴とする請求項16の該方法。
【図1A】

【図1B】
【図1C】
【図2】
【図3】
【図4A】
【図4B】
【図5A】
【図5B】
【図5C】
【図6】
【図7】
【図8A】
【図8B】
【図8C】
【図8D】
【図8E】
【図8F】
【図8G】
【図1B】
【図1C】
【図2】
【図3】
【図4A】
【図4B】
【図5A】
【図5B】
【図5C】
【図6】
【図7】
【図8A】
【図8B】
【図8C】
【図8D】
【図8E】
【図8F】
【図8G】
【公表番号】特表2008−528197(P2008−528197A)
【公表日】平成20年7月31日(2008.7.31)
【国際特許分類】
【出願番号】特願2007−553257(P2007−553257)
【出願日】平成18年1月27日(2006.1.27)
【国際出願番号】PCT/US2006/002908
【国際公開番号】WO2006/081409
【国際公開日】平成18年8月3日(2006.8.3)
【出願人】(507253244)
【Fターム(参考)】
【公表日】平成20年7月31日(2008.7.31)
【国際特許分類】
【出願日】平成18年1月27日(2006.1.27)
【国際出願番号】PCT/US2006/002908
【国際公開番号】WO2006/081409
【国際公開日】平成18年8月3日(2006.8.3)
【出願人】(507253244)
【Fターム(参考)】
[ Back to top ]