
ガスタービン制御装置及びガスタービンを制御するための方法
【課題】ガスタービンの過渡運転するための方法に関し、電力系統内で発電した電力と消費電力とを平衡に維持するため、発電出力を非常に速く変化させることが必要であり、このため、速い過渡中の燃焼の安定性を達成する制御系を提供する。
【解決手段】ガスタービンを運転するため、制御装置10が、吸入空気の質量流量dm/dtair,kCMD燃料の質量流量dm/dtfuel,iCMD及び適用可能であれば水又は蒸気の質量流用dm/dtw/s,jCMDに対するコマンド値を決定する。安定な希薄予混合火炎で速く過渡運転することを可能にするため、空気に対する燃料の比が、燃焼限界内に保持されるように、これらの供給系の動特性の違いを補償するため、及び、燃焼室3に流入する燃料、水、蒸気及び/又は燃焼空気の質量流量の結果として起こる変化を同期させるため、少なくとも1つのコマンド値が、動的に補償される。
【解決手段】ガスタービンを運転するため、制御装置10が、吸入空気の質量流量dm/dtair,kCMD燃料の質量流量dm/dtfuel,iCMD及び適用可能であれば水又は蒸気の質量流用dm/dtw/s,jCMDに対するコマンド値を決定する。安定な希薄予混合火炎で速く過渡運転することを可能にするため、空気に対する燃料の比が、燃焼限界内に保持されるように、これらの供給系の動特性の違いを補償するため、及び、燃焼室3に流入する燃料、水、蒸気及び/又は燃焼空気の質量流量の結果として起こる変化を同期させるため、少なくとも1つのコマンド値が、動的に補償される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ガスタービンを運転するための方法及びこのような方法を実施するために構成された制御装置を有するガスタービンモデルに関する。
【背景技術】
【0002】
最新のガスタービンは、排気規制を満たすために一般に希薄予混合火炎で運転する。安定な燃焼を全ての運転条件に対して保証するため、複雑な運転方法が、例えばヨーロッパ特許第0718470号明細書から公知であるように提唱されている。
【0003】
当該低い排気規制に加えて、実用されているガスタービンの過渡運転の性能に関する市場の要求が、ますます厳しくなっている。規定の周波数を維持する特性のほかに、特定地域の電力系統内のガスタービンが、全国の電力系統接続の喪失又は大きい電気負荷のような非常時を含む様々な条件下で電力の周波数を維持することを多くの場合に要求される。当該特定地域の電力系統内で発電した電力と消費電力とを平衡に維持するため、カスタービンが、その発電出力を非常に速く変化させることが可能でなければならない。
【0004】
これらの要求を満たすための必要条件は、速い過渡中の燃焼の安定性である。しかしながら、乾式のNOX排出量削減にとって好ましい技術である希薄予混合燃焼の引火範囲は、一般に比較的狭い。希薄予混合火炎の引火限界は、例えば拡散火炎の引火限界より非常に狭い。一般に、希薄予混合火炎の引火限界は、拡散火炎の引火限界より約一桁分小さい。当該引火限界は、火炎の安定性を表す。さらに、水及び蒸気の注入が、発電電力の増大と乾式のNOX削減とにとって普及している方法である。当該注入は、燃焼の安定性にも影響を及ぼす。
【0005】
公知の運転方法が、測定値に基づき且つアクチュエーターと制御弁とに対する直接のコマンドによって実施される場合、当該引火限界が、速い過渡運転中に容易に超過されうる。
【0006】
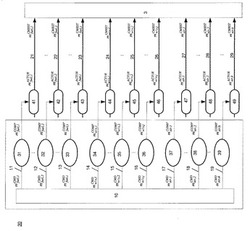
図1は、アクチュエーター41−49と燃焼器3までの供給路21,...,29とを有する従来のガスタービン制御系30の一例を示す。当該制御系自体は、制御装置10と制御線11−19とから構成される。測定された運転条件と運転対象とに基づいて、制御装置10が、燃料に対する質量流量iのコマンド
【0007】
【数1】

【0008】
を決定し、水/蒸気に対する質量流量jのコマンド
【0009】
【数2】
【0010】
を決定し、空気に対する質量流量kのコマンド
【0011】
【数3】
【0012】
を決定する。これらの質量流量のコマンドに基づいて、燃料供給用のアクチュエーター41,...,43、水/蒸気供給用のアクチュエーター44,...,47、及び空気供給用のアクチュエーターが、これらのアクチュエーターの位置を変えて、当該燃料供給用のアクチュエーターでの燃料ガスの質量流量を
【0013】
【数4】
【0014】
にし、当該水/蒸気供給用のアクチュエーターでの水/蒸気の質量流量jを
【0015】
【数5】
【0016】
にし、当該空気供給用のアクチュエーター、つまりVIGVでの空気の質量流量kを
【0017】
【数6】
【0018】
にする。
理想的には、燃焼器3に流入するこれらの質量流量は、コマンド実行時の質量流量に忠実にしたがう。しかしながら、燃料の供給路、水/蒸気の供給路及び空気の供給路が、異なる形及び容積を有し、それ故に、供給系動特性が相違しうるので、当該理想的な質量流量の追従は、実際の機関では起こり得ない。
【0019】
コマンド信号が同期されるとしても、これらのアクチュエーター、特に燃料供給路21,...,23、水/蒸気の供給路24,...,26及び空気の供給路27,...,29の相違する動特性に起因して、当該燃焼器の吸入口に到達する燃料の実際の質量流量i
【0020】
【数7】
【0021】
の変化と、当該燃焼器の吸入口に到達する水/蒸気の実際の質量流量j
【0022】
【数8】
【0023】
の変化と、当該燃焼器の吸入口に到達する空気の実際の質量流量k
【0024】
【数9】
【0025】
の変化とが同期しない。したがって、燃焼が不安定になりうる。
【先行技術文献】
【特許文献】
【0026】
【特許文献1】ヨーロッパ特許第0718470号明細書
【発明の概要】
【発明が解決しようとする課題】
【0027】
本発明の課題は、ガスタービンの燃焼器に流入する燃料の変化と水/蒸気の変化と空気流の変化とを同期させながら速い過渡運転を可能にする、ガスタービンを運転するための方法を提供することにある。結果として、過渡変化の速度が増大され得、火炎の安定性が、当該速い過渡中に維持され得る。さらに、動的補償を実行するために構成された制御系及びこのような制御装置を有するガスタービンが、本発明の課題である。本発明の追加の構成は、従属請求項に記載されている。
【課題を解決するための手段】
【0028】
燃料供給路iのアクチュエーターでの質量流量
【0029】
【数10】
【0030】
と燃料供給路iの燃焼器の吸入口での質量流量
【0031】
【数11】
【0032】
との間の関係が、一般に次のような伝達関数によって表現され得る。
【0033】
【数12】
【0034】
この場合、L()は、ラプラス変換を示す。Gfuel,i(s)は、燃料供給路iの供給系動特性を示す伝達関数である。当該ラプラス変換と伝達関数との相関関係が、燃料供給路iの形及び容積に依存する。
【0035】
対応する相関が、水/蒸気供給路及び空気供給路に対しても存在する。
【0036】
【数13】
【0037】
【数14】
【0038】
この場合、
【0039】
【数15】
【0040】
及び
【0041】
【数16】
【0042】
はそれぞれ、水/蒸気供給路j内のアクチュエーターでの質量流量及び燃焼器の吸入口での質量流量である。
【0043】
【数17】
【0044】
及び
【0045】
【数18】
【0046】
はそれぞれ、空気供給路k内のアクチュエーターでの質量流量及び燃焼器の吸入口での質量流量である。Gw/s,j(s)及びGair,k(s)は、供給系動特性を表す伝達関数である。
【0047】
本発明は、コマンド実行時の複数の質量流量のうちの少なくとも1つの質量流量が、供給系の動的挙動の違いに対して補償されるときに、顕著な効果が達成され得ることを実現することに基づく。
【0048】
動的挙動の違いを補償するため、過渡運転中にガスタービンを運転する方法が提唱されている。この方法は、可変入り口静翼を有する圧縮機、燃焼器、タービン、制御装置、測定装置、アクチュエーター、吸入空気用の供給路並びに燃料ガス、液体燃料、水及び蒸気のうちの少なくとも1つ用の供給路を有するガスタービンのために提唱されている。
【0049】
圧力の境界条件及び温度の境界条件のほかに、火炎の安定性が主に、燃焼器に流入する質量流量によって決定される。当該提唱された方法によれば、制御装置が、吸入空気の質量流量に対するコマンド値を決定し、燃料ガスの質量流量、液体燃料の質量流量、水の質量流量及び蒸気の質量流量のうちの1つの質量流量に対する少なくとも1つのコマンド値を決定する。燃焼室に流入する燃料、水、蒸気及び/又は燃焼空気の供給の結果として起こる変化を同期させるため、少なくとも1つのコマンド値が動的に補償される。アクチュエーター及び/又は供給路の供給系動特性を補償することによって、空気に対する燃料の比が、燃焼限界内に保持される。簡潔に表現するため、以下の説明では、供給路、アクチュエーター及び制御要素を供給系と呼ぶ。
【0050】
これらの種々の供給系の動特性の速度が異なる。従来では、速度が、最も遅い供給系の速度に制限される。過渡変化の速度が、特に燃料供給系の容積と燃料ガスの体積流量との比に依存する。下流に大きい容積の制御弁を有する燃料ガス供給路から成る燃料ガスの供給系が、遅い動特性を有する。何故なら、当該制御弁の位置の変化が、燃焼器内に流入する燃料ガスに即座に影響を及ぼさないからである。例えば、制御弁を開いた後に、燃焼器内に流入する燃料ガスが、希望した値まで増大するまで、燃料ガス供給系の大きい容積をさらに圧力調整する必要がある。しかしながら、過渡変化が、制御された信号の加速によって加速されうる。例えば、制御弁の開きが、意図した定常状態の位置及び制御された微調整まで減少する前に、この制御弁が、新しい動作点に達するために必要とされる以上に短期間のうちにさらに開かれうる。
【0051】
したがって、さらなる実施の形態では、少なくとも1つのコマンド値の変化が加速されることが提唱されている。つまり、空気、燃料ガス、液体燃料、水及び/又は蒸気の供給路の遅い動特性を緩和させるため、少なくとも1つのコマンド値の変化が加速される。コマンド実効値の値が、運転中により速い過渡変化を可能にするために動的に補償される前又は後に、当該値が加速され得る。加速と補償とが結合されてもよい。
【0052】
当該発明によれば、制御装置からの少なくとも1つの信号が、対応するアクチュエーターに対して送信される前に、当該信号が補償される。当該補償は、制御系自体内で実行され得る。このため、当該制御装置が、制御装置と動的補償器とに実質的に分割されてもよい。あるいは、当該制御系が、制御装置と独立した動的補償器とから構成される。
【0053】
動的補償は、様々なアルゴリズムに基づき得る。例えば、シミュレーション又は実験に基づいた経験による補償が実行され得る。特定の変化に対して要求される補償が決定されてもよい。要求される補償が、ルックアップテーブル内に記憶されてもよいし又は多項式関数によって近似されてもよい。
【0054】
速くて且つ数値的に簡単な補償が、ラプラス変換された周波数領域内で実行され得る。当該方法の1つの実施の形態によれば、空気、燃料ガス、液体燃料、水及び蒸気の供給路、アクチュエーター並びに制御要素のうちの少なくとも1つの動特性が、伝達関数で表される。この実施の形態では、動的補償、及び/又は、燃料ガス、液体燃料、水及び/又は蒸気の供給系に対する少なくとも1つのコマンド信号の加速が、伝達関数で近似される。
【0055】
例えば、燃料コマンド
【0056】
【数19】
【0057】
が、以下のように動的補償された燃料コマンド
【0058】
【数20】
【0059】
に補償される。
【0060】
【数21】
【0061】
この場合、
【0062】
【数22】
【0063】
は、燃料供給路i用の補償器である。同様に、
【0064】
【数23】
【0065】
【数24】
【0066】
この場合、
【0067】
【数25】
【0068】
は、水/蒸気供給路j用の補償器を表す伝達関数であり、
【0069】
【数26】
【0070】
は、空気供給路k用の補償器を表す伝達関数である。
【0071】
燃料供給路の動特性と比較すると、アクチュエーターは速くでき、これらのアクチュエーターが完全に較正されることが仮定できる。すなわち、以下の仮定が、簡単化のために使用され得る。
【0072】
【数27】
【0073】
【数28】
【0074】
【数29】
【0075】
当該アクチュエーターを、方程式7−9にしたがうアクチュエーター値によって補償された値に置換し、当該アクチュエーター値に対して得られた方程式を、燃焼器に対する供給系を表す相関(方程式1−3)に当て嵌めると、
【0076】
【数30】
【0077】
【数31】
【0078】
【数32】
【0079】
が得られる。
【0080】
これらの異なる質量流量の変化を同期させるためには、供給系を表す伝達関数と補償関数との積が等しい必要があることが、方程式10−12から明らかである。
【0081】
【数33】
【0082】
このことは、質量流量のコマンドと燃焼器の吸入口での質量流量との間の伝達関数が全ての供給路に対して同じであることを意味する。このことは、過渡運転中に燃焼器の吸入口で燃料の質量流量と水/蒸気の質量流量と空気の質量流量とを同期させる。
【0083】
【数34】
【0084】
当該手順によれば、これらの伝達関数が、2つの質量流量だけ、例えば空気及び燃料の質量流量に対して同期されてもよいし又は同様に任意のその他の質量流量に対して同期されてもよい。
【0085】
当該制御を加速させるため、燃料、水/蒸気及び空気の供給路によって引き起こされた遅延が緩和され得るように、補償器が、位相を進ませるために設計されなければならない。
【0086】
コマンド群内のコマンド信号の補償を簡略化するため、1つの実施の形態では、最も遅い動特性を有する供給系のコマンド信号をあらゆる補償なしに使用すること及び当該遅い供給系に合わせるためにより速い供給系だけを補償することが提唱されている。
【0087】
すなわち、例えば、燃料の供給系が、最も遅い供給系であるときは、補償なしの方程式10が、
【0088】
【数35】
【0089】
又は
【0090】
【数36】
【0091】
になる。
【0092】
例えば空気に対して補償関数を得るためには、
【0093】
【数37】
【0094】
を得るために、方程式16が、方程式14に代入され、方程式12に結合して、
【0095】
【数38】
【0096】
になる。
【0097】
最終的には、
【0098】
【数39】
【0099】
になる。
【0100】
同様に、供給系内の水/蒸気又は任意のその他の質量流量のコマンドに対する補償関数が導き出され得る。明らかに、任意のその他の最も遅い供給系が、補償関数を導き出すために使用され得る。
【0101】
一般に、速い動特性を有する供給路の補償関数
【0102】
【数40】
【0103】
は、最も遅い供給路
【0104】
【数41】
【0105】
と速い供給路
【0106】
【数42】
【0107】
との伝達関数の関数として記述され得る。
【0108】
【数43】
【0109】
すなわち、1つの実施の形態によれば、空気、燃料ガス、液体燃料、水及び蒸気の供給系のうちの最も遅いものの動特性が、動的に補償されないままであり且つ1つの伝達関数で記述される。燃料ガス、液体燃料、水及び蒸気の、より速い動特性を有する供給系のうちの少なくとも1つの供給系の動特性が、1つの伝達関数で記述され、空気、燃料ガス、液体燃料、水及び/又は蒸気の供給系に対する少なくとも1つのコマンド信号の同期補償が、複数の伝達関数を使用して実行される。
【0110】
1つの実施の形態によれば、類似の動特性を有する1つ以上の燃料ガス供給路を備える供給系内では、これらの燃料ガス供給路が、動的に補償されないままであり且つ1つの伝達関数で記述される。空気の供給系の動特性が、複数の伝達関数で記述され且つ動的に補償される。空気供給に対するコマンド信号の動的補償及び/又は加速が、当該複数の伝達関数を使用して計算される。
【0111】
1つのさらなる実施の形態では、異なる動特性を有する幾つかの燃料ガス供給系を備える供給系内では、最も遅い燃料ガス供給系の動特性が、動的に補償されないままである。空気供給系並びにより速い燃料ガス及び/又は液体燃料の供給系の動特性が、複数の伝達関数で記述される。空気供給路並びにより速い燃料ガス及び/又は液体燃料供給路に対するコマンド信号が、動的に補償される。この場合、当該動的補償及び/又は加速が、当該複数の伝達関数から導き出される。
【0112】
当該方法のほかに、このような方法を実施するために設計されているガスタービン用の制御系が、本発明の課題である。
【0113】
当該制御系は、可変入り口静翼を有する圧縮機、燃焼器、タービン、制御装置、測定装置、アクチュエーター、吸入空気供給路並びに燃料ガス及び/又は液体燃料及び/又は水及び/又は蒸気用の供給路を備えるガスタービンを制御するために設計されている。
【0114】
当該制御系は、吸入空気の質量流量並びに燃料ガスの質量流量、液体燃料の質量流量、水の質量流量及び蒸気の質量流量のうちの少なくとも1つの質量流量に対するコマンド値を決定するために設計されている。本発明によれば、当該制御系は、燃焼器に流入する少なくとも1つの主要な質量流量を制御するための動的補償器をさらに有する。この場合、当該主要な質量流量には、空気、燃料ガス及び/又は液体燃料及び/又は水及び/又は蒸気の質量流量が挙げられる。
【0115】
燃焼器に到達する燃料、水、蒸気及び燃焼空気の質量流量の過度変化が同期するように、様々な質量流量供給系の異なる供給系動特性を補償するため、少なくとも1つのコマンド信号が、過渡運転中に補正される。当該複数の過渡変化を同期させることによって、燃焼器に到達する流体の空気に対する燃料の比が、燃焼限界内で保持され、又は適用可能であるならば、当該流体の燃料に対する蒸気及び/又は水の比も、燃料限界内で保持される。
【0116】
1つの実施の形態によれば、コマンド実効値の値が、運転中により速い過渡変化を可能にするために動的に補償される前又は後に、空気、燃料ガス、液体燃料、水及び/又は蒸気の供給系の遅い動特性を緩和させるため、制御系が、加速器をさらに有する。この加速器は、燃料供給用の動的補償器、水若しくは蒸気供給用の動的補償器及び/又は空気供給用の動的補償器と組み合わせてもよい。
【0117】
さらなる実施の形態によれば、空気供給系用の動的補償器が、1つの伝達関数を有する。この伝達関数は、空気、燃料ガス、液体燃料、水及び蒸気の供給系のうちの少なくとも1つの供給系の動特性を記述する。
【0118】
さらなる実施の形態によれば、ガスタービンを制御するための制御系が、燃焼器の最も遅い供給系に対するコマンド信号用の動的補償器を有さないものの、1つの動的補償器が、より速い動特性を有する少なくとも1つの供給系に対して提供される。このことは、コマンド信号が最も遅い信号を制御するために直接使用されることを意味する。より具体的には、動的補償器が、空気、燃料ガス、液体燃料、水及び蒸気の最も遅い供給系に対して提供されず、燃料ガス、液体燃料、水及び蒸気の供給系のうちのより速い動特性を有する少なくとも1つの供給系に対して提供される。
【0119】
当該制御系のもう1つのより具体的な実施の形態では、動的補償器が、燃料ガス供給路に対して提供されず、1つの動的補償器が、空気の供給系に対して提供される。
【0120】
当該制御系のほかに、このような制御系を有するガスタービンが、本発明の課題である。
【0121】
ラプラス変換された周波数領域では、物理的な出力変数が、ラプラス変換の関数によって表現され得る。これらの伝達関数のパラメーターが、複数のステップ応答試験によって確認され得る。これらのステップ応答試験は、実際の機関に基づいて又は精密な動的モデルによって実施され得る。
【図面の簡単な説明】
【0122】
【図1】制御装置、アクチュエーター、制御線、及び燃焼器までの供給路を有する従来のガスタービン制御系の一例を示す。
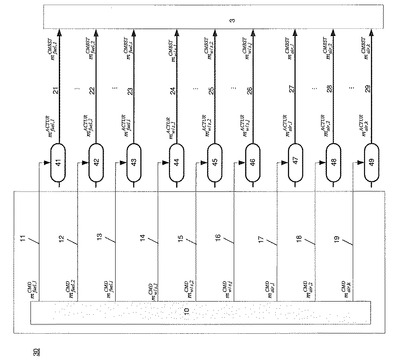
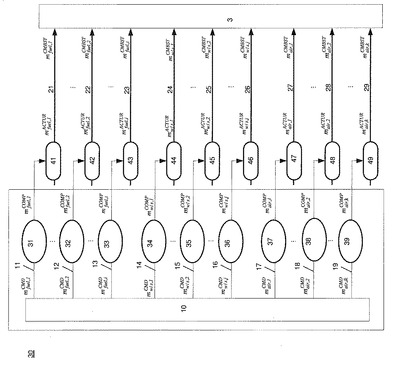
【図2】制御装置、動的補償器、制御線、アクチュエーター、及び燃焼器までの供給路を有する本発明によるガスタービン制御系の1つの実施の形態を示す。
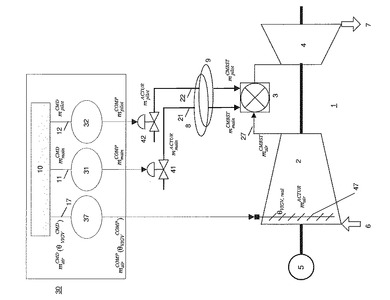
【図3】制御装置、動的補償器、アクチュエーター、制御線、及び燃焼器までの供給路を有する本発明による制御系を備えるガスタービンの1つの実施の形態を示す。
【発明を実施するための形態】
【0123】
以下に、本発明、その特徴及び利点を図面に基づいてより詳細に説明する。
【0124】
以下では、同じ構成要素又は機能的に等しい構成要素は、同じ記号で付記されている。以下に示された値及び寸法の列挙は、代表的な値にすぎず、本発明をこのような寸法に決して限定するものではない。
【0125】
図2は、本発明によるガスタービンの制御系30の代表的な実施の形態を示す。図2は、図1に基づく。制御装置10、制御線11,...,19、アクチュエーター41,...,49及び燃焼器までの供給路21,...,29が示されている。さらに、図2の制御系30が、動的補償器31,...,39を有する。コマンド実行時の燃料の質量流量
【0126】
【数44】
【0127】
が、燃料供給路用の動的補償器31,...,33によって補償され、コマンド実行時の水/蒸気の質量流量
【0128】
【数45】
【0129】
が、水/蒸気供給路用の動的補償器34,...,36によって補償され、コマンド実行時の空気の質量流量
【0130】
【数46】
【0131】
が、空気供給路用の動的補償器37,...,39によって補償される。
【0132】
図1及び3の例では、水及び蒸気が、オプションとして提供される。しかしながら、このことは、決して限定するものではなく、本発明は、希望通りの水及び蒸気の注入を伴うガスタービンに対して実施されてもよい。
【0133】
図3は、本発明による制御系30を有するガスタービン1の代表的な実施の形態を示す。ガスタービン1は、制御装置10、動的補償器31,32,37、アクチュエーター41,42,47、制御線11,12,17及び燃焼器3までの供給路21,22,27を有する。
【0134】
図3のガスタービン1は、2つの燃料ガス供給路21,22を有する、すなわち主バーナー群に対する1つの燃料ガス供給路とパイロットバーナー群に対するもう1つの燃料ガス供給路とを有する。当該主バーナー群は、予備混合群であり且つ遥かにより厳しいリッチ限界とリーン限界とを有する。この主バーナー群は、燃焼器の運転範囲を決定する。
【0135】
図3中の
【0136】
【数47】
【0137】
【数48】
【0138】
及び
【0139】
【数49】
【0140】
は、燃焼器の吸入口での、主燃料ガス、パイロットガス及び空気の質量流量である。
【0141】
【数50】
【0142】
及び
【0143】
【数51】
【0144】
は、アクチュエーター41,42つまり燃料ガスの制御弁での燃料ガスの質量流量である。空気の質量流量用のアクチュエーター47は、可変入り口静翼(VIGV)である。当該アクチュエーターでの空気の質量流量
【0145】
【数52】
【0146】
は、圧縮機の吸入口での空気の質量流量である。制御装置10が、主燃料に対する質量流量のコマンド
【0147】
【数53】
【0148】
を生成し、パイロット燃料に対する質量流量
【0149】
【数54】
【0150】
を生成し、空気流に対する質量流量
【0151】
【数55】
【0152】
を生成する。これらの質量流量のコマンドが、燃料31,32用の動的補償器及び空気37用の動的補償器内で様々な動特性に関して補償され、当該補償されたコマンド
【0153】
【数56】
【0154】
【数57】
【0155】
及び
【0156】
【数58】
【0157】
が、アクチュエーター41,42,47に対して送信される。
【0158】
一般に、空気の質量流量のコマンド
【0159】
【数59】
【0160】
の代わりに、VIGVのコマンドθVIGVCMDが、制御装置10によって生成される。さらに、一般に、燃料の質量流量のコマンド
【0161】
【数60】
【0162】
及び
【0163】
【数61】
【0164】
が、弁行程に変換される。簡略化のために、VIGVの位置及び制御弁の行程の代わりに、質量流量が、その後も依然として使用される。
【0165】
これらの燃料ガス供給路は、一般に大きい容積の燃料供給系8,9を有する。これらの燃料供給系8,9の動特性が、
【0166】
【数62】
【0167】
【数63】
【0168】
にしたがう伝達遅れを伴う一次遅れによって近似され得る。
【0169】
この場合、
【0170】
【数64】
【0171】
及び
【0172】
【数65】
【0173】
は、主ガス供給路21及びパイロットガス供給路22であり、
【0174】
【数66】
【0175】
及び
【0176】
【数67】
【0177】
は、燃料ガス供給系の容積に依存する時定数である。
【0178】
圧縮機2が、空気を燃焼器3に対して供給し且つその質量流量を制御するために可変入り口静翼(VIGV)47を使用する。この可変入り口静翼(VIGV)47の動特性が、
【0179】
【数68】
【0180】
にしたがう伝達遅れを伴う二次遅れによって近似され得る。
【0181】
この場合、Lairは、圧縮機2の伝達遅れ時間であり、tVIGVは、VIGVの時定数であり、tairは、圧縮機の容積に依存する時定数である。
【0182】
一般に、tmain及びtpilotは、tVIGV及びtairより遥かに大きく、Lmain及びLpilotは、Lairより長い。したがって、燃料ガス供給路21,22は、圧縮機2より遅い動特性を有する。
【0183】
方程式7及び9に関しては、アクチュエーター41,42の動特性が、燃料供給路21,22の動特性より速く、当該アクチュエーター41,42の動特性が、完全に較正されることが推測され得る。したがって、方程式7及び9が適用され得る。空気供給路(圧縮機2)が速い供給路であり、且つ、主燃料ガス供給路21が最も遅い供給路である場合に、補償が、主燃料に対して適用されないならば、方程式21及び23が、伝達関数Gmain(s)及びGair(s)を得るために使用され得、パイロットガスに対する所要の補償関数:
【0184】
【数69】
【0185】
、及び、空気の質量流量に対する所要の補償関数:
【0186】
【数70】
【0187】
を得るために方程式20に挿入され得る。
【0188】
当該供給系の動特性を加速させるため、補償器(1+tmain・s)/(1+taccel・s)が選択され得る。この場合、taccelは、仮想時定数である。この仮想時定数は、当該最も遅い供給路の時定数より小さくなくてはならない。つまりこの場合は、当該補償器に位相を進ませるため、この仮想時定数が、主燃料ガス供給路の時定数tmainより小さくなくてはならない。
【0189】
当該補償器を当該速い供給系のための方程式24及び25に適用することによって、加速されたパイロットガスに対する補償関数:
【0190】
【数71】
【0191】
、及び、加速された空気の質量流量に対する補償関数
【0192】
【数72】
【0193】
が得られる。
【0194】
結果として得られる主燃料ガスの質量流量に対する補償関数は、加速用の補償器(1+tmain・s)/(1+taccel・s)の1倍である:
【0195】
【数73】
【0196】
当該アクチュエーターの動特性が、燃料供給路の動特性と比べて速く、当該アクチュエーターの動特性が、完全に較正されることが推測され得るときは、方程式7及び8が適用され得、当該補償された質量流量が、アクチュエーターの質量流量に等しい。したがって、方程式26及び27がそれぞれ、方程式21及び22に適用され得、同様に方程式28が、方程式23に適用され得る。これらの全ての方程式から、以下の加速された全体の伝達関数G″(s)が得られる:
【0197】
【数74】
【0198】
このことは、燃焼器の吸入口での、燃料ガスの質量流量及び空気の質量流量が、方程式26−28で規定された補償器を実現させることによって同期され得且つ加速され得ることを意味する。
【0199】
仮想時定数taccelは、慎重に決定されなければならない。一方では、この仮想時定数taccelは、tmainより小さくなくてはならない。他方では、この仮想時定数taccelは、小さすぎてはならない。加速度が高すぎる、つまり仮想時定数taccelが小さすぎるときは、閉ループ制御の全体が、不安定になりうる。動的システムの顕著に安定な緩和を可能にするためには、主時定数tmainに対する加速時定数taccelの比は、一般に0.2−0.8の範囲内、好ましくは0.4−0.6の範囲内にある。
【0200】
したがって、本発明の思想又は本質的な特徴から離れることなしに、本発明がその他の特殊な形態で具体化され得ることが、当業者によって認識される。したがって、ここで開示された実施の形態は、全ての観点において例示とみなされ且つ限定されるべきものではない。本発明の範囲は、上記の説明ではなくて添付された特許請求の範囲によって示される。本発明の意味及び範囲及び同意義内での起こる全ての変更は、本発明に包含されるとみなされる。
【符号の説明】
【0201】
1 ガスタービン
2 圧縮機
3 燃焼器
4 タービン
5 発電機
6 吸入空気
7 排ガス
8 主燃料ガス供給系
9 パイロットガス供給系
10 制御装置
11,...,13 燃料供給用の制御線
14,...,16 水及び/又は蒸気供給用の制御線
17,...,19 空気供給用の制御線
21,...,23 燃料供給路
24,...,26 水及び/又は蒸気供給路
27,...,29 空気供給路
30 制御系
31,...,33 燃料供給用の動的補償器
34,...,36 動的補償器水及び/又は蒸気供給用の動的補償器
37,...,39 空気供給用の動的補償器
41,...,43 燃料供給用のアクチュエーター
44,...,46 水及び/又は蒸気供給用のアクチュエーター
47,...,49 空気供給用のアクチュエーター
dm/dtmainCMBST 燃焼器の吸入口での主燃料ガスの質量流量
dm/dtpilotCMBST 燃焼器の吸入口でのパイロットガスの質量流量
dm/dtairCMBST 燃焼器の吸入口での空気の質量流量
dm/dtfuel,iCMBST 燃焼器の吸入口での燃料の質量流量i
dm/dtw/s,jCMBST 燃焼器の吸入口での水/蒸気の質量流量j
dm/dtair,kCMBST 燃焼器の吸入口での空気の質量流量k
dm/dtmainACTUR アクチュエーターでの主燃料の質量流量
dm/dtpilotACTUR アクチュエーターでのパイロット燃料ガスの質量流量
dm/dtairACTUR アクチュエーター、つまりVIGVでの空気の質量流量
dm/dtfuel,iACTUR アクチュエーターでの燃料の質量流量i
dm/dtw/s,jACTUR アクチュエーターでの水/蒸気の質量流量j
dm/dtair,kACTUR アクチュエーター、つまりVIGVでの空気の質量流量k
dm/dtmainCMD 制御装置10によって生成された主燃料の質量流量のコマンド
dm/dtpilotCMD 制御装置10によって生成されたパイロット燃料の質量流量のコマンド
dm/dtairCMD 制御装置10によって生成された空気の質量流量のコマンド
dm/dtfuel,iCMD 制御装置10によって生成された燃料の質量流量のコマンドi
dm/dtw/s,jCMD 制御装置10によって生成された水/蒸気の質量流量のコマンドj
dm/dtair,kCMD 制御装置10によって生成された空気の質量流量のコマンドk
dm/dtmainCOMP 燃料供給用の動的補償器31によって生成された主燃料の補償された質量流量のコマンド
dm/dtpilotCOMP パイロット燃料供給用の動的補償器32によって生成されたパイロット燃
料の補償された質量流量のコマンド
dm/dtairCOMP 空気供給用の動的補償器37によって生成された空気の補償された質量流量のコマンド
dm/dtfuel,iCOMP 燃料供給用の動的補償器31,...,33によって生成された燃料の補償されたコマンドi
dm/dtw/s,jCOMP パイロット燃料供給用の動的補償器34,...,36によって生成された水/蒸気の補償されたコマンドj
dm/dtair,kCOMP 吸気供給用の動的補償器37,...,39によって生成された空気の質量流量の補償されたコマンドk
VIGV 可変入り口静翼
θVIGV 可変入り口静翼の仮想の位置
θVIGV,cmd 可変入り口静翼のコマンド実行時の位置
θVIGV,real 可変入り口静翼の位置
【技術分野】
【0001】
本発明は、ガスタービンを運転するための方法及びこのような方法を実施するために構成された制御装置を有するガスタービンモデルに関する。
【背景技術】
【0002】
最新のガスタービンは、排気規制を満たすために一般に希薄予混合火炎で運転する。安定な燃焼を全ての運転条件に対して保証するため、複雑な運転方法が、例えばヨーロッパ特許第0718470号明細書から公知であるように提唱されている。
【0003】
当該低い排気規制に加えて、実用されているガスタービンの過渡運転の性能に関する市場の要求が、ますます厳しくなっている。規定の周波数を維持する特性のほかに、特定地域の電力系統内のガスタービンが、全国の電力系統接続の喪失又は大きい電気負荷のような非常時を含む様々な条件下で電力の周波数を維持することを多くの場合に要求される。当該特定地域の電力系統内で発電した電力と消費電力とを平衡に維持するため、カスタービンが、その発電出力を非常に速く変化させることが可能でなければならない。
【0004】
これらの要求を満たすための必要条件は、速い過渡中の燃焼の安定性である。しかしながら、乾式のNOX排出量削減にとって好ましい技術である希薄予混合燃焼の引火範囲は、一般に比較的狭い。希薄予混合火炎の引火限界は、例えば拡散火炎の引火限界より非常に狭い。一般に、希薄予混合火炎の引火限界は、拡散火炎の引火限界より約一桁分小さい。当該引火限界は、火炎の安定性を表す。さらに、水及び蒸気の注入が、発電電力の増大と乾式のNOX削減とにとって普及している方法である。当該注入は、燃焼の安定性にも影響を及ぼす。
【0005】
公知の運転方法が、測定値に基づき且つアクチュエーターと制御弁とに対する直接のコマンドによって実施される場合、当該引火限界が、速い過渡運転中に容易に超過されうる。
【0006】
図1は、アクチュエーター41−49と燃焼器3までの供給路21,...,29とを有する従来のガスタービン制御系30の一例を示す。当該制御系自体は、制御装置10と制御線11−19とから構成される。測定された運転条件と運転対象とに基づいて、制御装置10が、燃料に対する質量流量iのコマンド
【0007】
【数1】
【0008】
を決定し、水/蒸気に対する質量流量jのコマンド
【0009】
【数2】
【0010】
を決定し、空気に対する質量流量kのコマンド
【0011】
【数3】
【0012】
を決定する。これらの質量流量のコマンドに基づいて、燃料供給用のアクチュエーター41,...,43、水/蒸気供給用のアクチュエーター44,...,47、及び空気供給用のアクチュエーターが、これらのアクチュエーターの位置を変えて、当該燃料供給用のアクチュエーターでの燃料ガスの質量流量を
【0013】
【数4】
【0014】
にし、当該水/蒸気供給用のアクチュエーターでの水/蒸気の質量流量jを
【0015】
【数5】
【0016】
にし、当該空気供給用のアクチュエーター、つまりVIGVでの空気の質量流量kを
【0017】
【数6】
【0018】
にする。
理想的には、燃焼器3に流入するこれらの質量流量は、コマンド実行時の質量流量に忠実にしたがう。しかしながら、燃料の供給路、水/蒸気の供給路及び空気の供給路が、異なる形及び容積を有し、それ故に、供給系動特性が相違しうるので、当該理想的な質量流量の追従は、実際の機関では起こり得ない。
【0019】
コマンド信号が同期されるとしても、これらのアクチュエーター、特に燃料供給路21,...,23、水/蒸気の供給路24,...,26及び空気の供給路27,...,29の相違する動特性に起因して、当該燃焼器の吸入口に到達する燃料の実際の質量流量i
【0020】
【数7】
【0021】
の変化と、当該燃焼器の吸入口に到達する水/蒸気の実際の質量流量j
【0022】
【数8】
【0023】
の変化と、当該燃焼器の吸入口に到達する空気の実際の質量流量k
【0024】
【数9】
【0025】
の変化とが同期しない。したがって、燃焼が不安定になりうる。
【先行技術文献】
【特許文献】
【0026】
【特許文献1】ヨーロッパ特許第0718470号明細書
【発明の概要】
【発明が解決しようとする課題】
【0027】
本発明の課題は、ガスタービンの燃焼器に流入する燃料の変化と水/蒸気の変化と空気流の変化とを同期させながら速い過渡運転を可能にする、ガスタービンを運転するための方法を提供することにある。結果として、過渡変化の速度が増大され得、火炎の安定性が、当該速い過渡中に維持され得る。さらに、動的補償を実行するために構成された制御系及びこのような制御装置を有するガスタービンが、本発明の課題である。本発明の追加の構成は、従属請求項に記載されている。
【課題を解決するための手段】
【0028】
燃料供給路iのアクチュエーターでの質量流量
【0029】
【数10】
【0030】
と燃料供給路iの燃焼器の吸入口での質量流量
【0031】
【数11】
【0032】
との間の関係が、一般に次のような伝達関数によって表現され得る。
【0033】
【数12】
【0034】
この場合、L()は、ラプラス変換を示す。Gfuel,i(s)は、燃料供給路iの供給系動特性を示す伝達関数である。当該ラプラス変換と伝達関数との相関関係が、燃料供給路iの形及び容積に依存する。
【0035】
対応する相関が、水/蒸気供給路及び空気供給路に対しても存在する。
【0036】
【数13】
【0037】
【数14】
【0038】
この場合、
【0039】
【数15】
【0040】
及び
【0041】
【数16】
【0042】
はそれぞれ、水/蒸気供給路j内のアクチュエーターでの質量流量及び燃焼器の吸入口での質量流量である。
【0043】
【数17】
【0044】
及び
【0045】
【数18】
【0046】
はそれぞれ、空気供給路k内のアクチュエーターでの質量流量及び燃焼器の吸入口での質量流量である。Gw/s,j(s)及びGair,k(s)は、供給系動特性を表す伝達関数である。
【0047】
本発明は、コマンド実行時の複数の質量流量のうちの少なくとも1つの質量流量が、供給系の動的挙動の違いに対して補償されるときに、顕著な効果が達成され得ることを実現することに基づく。
【0048】
動的挙動の違いを補償するため、過渡運転中にガスタービンを運転する方法が提唱されている。この方法は、可変入り口静翼を有する圧縮機、燃焼器、タービン、制御装置、測定装置、アクチュエーター、吸入空気用の供給路並びに燃料ガス、液体燃料、水及び蒸気のうちの少なくとも1つ用の供給路を有するガスタービンのために提唱されている。
【0049】
圧力の境界条件及び温度の境界条件のほかに、火炎の安定性が主に、燃焼器に流入する質量流量によって決定される。当該提唱された方法によれば、制御装置が、吸入空気の質量流量に対するコマンド値を決定し、燃料ガスの質量流量、液体燃料の質量流量、水の質量流量及び蒸気の質量流量のうちの1つの質量流量に対する少なくとも1つのコマンド値を決定する。燃焼室に流入する燃料、水、蒸気及び/又は燃焼空気の供給の結果として起こる変化を同期させるため、少なくとも1つのコマンド値が動的に補償される。アクチュエーター及び/又は供給路の供給系動特性を補償することによって、空気に対する燃料の比が、燃焼限界内に保持される。簡潔に表現するため、以下の説明では、供給路、アクチュエーター及び制御要素を供給系と呼ぶ。
【0050】
これらの種々の供給系の動特性の速度が異なる。従来では、速度が、最も遅い供給系の速度に制限される。過渡変化の速度が、特に燃料供給系の容積と燃料ガスの体積流量との比に依存する。下流に大きい容積の制御弁を有する燃料ガス供給路から成る燃料ガスの供給系が、遅い動特性を有する。何故なら、当該制御弁の位置の変化が、燃焼器内に流入する燃料ガスに即座に影響を及ぼさないからである。例えば、制御弁を開いた後に、燃焼器内に流入する燃料ガスが、希望した値まで増大するまで、燃料ガス供給系の大きい容積をさらに圧力調整する必要がある。しかしながら、過渡変化が、制御された信号の加速によって加速されうる。例えば、制御弁の開きが、意図した定常状態の位置及び制御された微調整まで減少する前に、この制御弁が、新しい動作点に達するために必要とされる以上に短期間のうちにさらに開かれうる。
【0051】
したがって、さらなる実施の形態では、少なくとも1つのコマンド値の変化が加速されることが提唱されている。つまり、空気、燃料ガス、液体燃料、水及び/又は蒸気の供給路の遅い動特性を緩和させるため、少なくとも1つのコマンド値の変化が加速される。コマンド実効値の値が、運転中により速い過渡変化を可能にするために動的に補償される前又は後に、当該値が加速され得る。加速と補償とが結合されてもよい。
【0052】
当該発明によれば、制御装置からの少なくとも1つの信号が、対応するアクチュエーターに対して送信される前に、当該信号が補償される。当該補償は、制御系自体内で実行され得る。このため、当該制御装置が、制御装置と動的補償器とに実質的に分割されてもよい。あるいは、当該制御系が、制御装置と独立した動的補償器とから構成される。
【0053】
動的補償は、様々なアルゴリズムに基づき得る。例えば、シミュレーション又は実験に基づいた経験による補償が実行され得る。特定の変化に対して要求される補償が決定されてもよい。要求される補償が、ルックアップテーブル内に記憶されてもよいし又は多項式関数によって近似されてもよい。
【0054】
速くて且つ数値的に簡単な補償が、ラプラス変換された周波数領域内で実行され得る。当該方法の1つの実施の形態によれば、空気、燃料ガス、液体燃料、水及び蒸気の供給路、アクチュエーター並びに制御要素のうちの少なくとも1つの動特性が、伝達関数で表される。この実施の形態では、動的補償、及び/又は、燃料ガス、液体燃料、水及び/又は蒸気の供給系に対する少なくとも1つのコマンド信号の加速が、伝達関数で近似される。
【0055】
例えば、燃料コマンド
【0056】
【数19】
【0057】
が、以下のように動的補償された燃料コマンド
【0058】
【数20】
【0059】
に補償される。
【0060】
【数21】
【0061】
この場合、
【0062】
【数22】
【0063】
は、燃料供給路i用の補償器である。同様に、
【0064】
【数23】
【0065】
【数24】
【0066】
この場合、
【0067】
【数25】
【0068】
は、水/蒸気供給路j用の補償器を表す伝達関数であり、
【0069】
【数26】
【0070】
は、空気供給路k用の補償器を表す伝達関数である。
【0071】
燃料供給路の動特性と比較すると、アクチュエーターは速くでき、これらのアクチュエーターが完全に較正されることが仮定できる。すなわち、以下の仮定が、簡単化のために使用され得る。
【0072】
【数27】
【0073】
【数28】
【0074】
【数29】
【0075】
当該アクチュエーターを、方程式7−9にしたがうアクチュエーター値によって補償された値に置換し、当該アクチュエーター値に対して得られた方程式を、燃焼器に対する供給系を表す相関(方程式1−3)に当て嵌めると、
【0076】
【数30】
【0077】
【数31】
【0078】
【数32】
【0079】
が得られる。
【0080】
これらの異なる質量流量の変化を同期させるためには、供給系を表す伝達関数と補償関数との積が等しい必要があることが、方程式10−12から明らかである。
【0081】
【数33】
【0082】
このことは、質量流量のコマンドと燃焼器の吸入口での質量流量との間の伝達関数が全ての供給路に対して同じであることを意味する。このことは、過渡運転中に燃焼器の吸入口で燃料の質量流量と水/蒸気の質量流量と空気の質量流量とを同期させる。
【0083】
【数34】
【0084】
当該手順によれば、これらの伝達関数が、2つの質量流量だけ、例えば空気及び燃料の質量流量に対して同期されてもよいし又は同様に任意のその他の質量流量に対して同期されてもよい。
【0085】
当該制御を加速させるため、燃料、水/蒸気及び空気の供給路によって引き起こされた遅延が緩和され得るように、補償器が、位相を進ませるために設計されなければならない。
【0086】
コマンド群内のコマンド信号の補償を簡略化するため、1つの実施の形態では、最も遅い動特性を有する供給系のコマンド信号をあらゆる補償なしに使用すること及び当該遅い供給系に合わせるためにより速い供給系だけを補償することが提唱されている。
【0087】
すなわち、例えば、燃料の供給系が、最も遅い供給系であるときは、補償なしの方程式10が、
【0088】
【数35】
【0089】
又は
【0090】
【数36】
【0091】
になる。
【0092】
例えば空気に対して補償関数を得るためには、
【0093】
【数37】
【0094】
を得るために、方程式16が、方程式14に代入され、方程式12に結合して、
【0095】
【数38】
【0096】
になる。
【0097】
最終的には、
【0098】
【数39】
【0099】
になる。
【0100】
同様に、供給系内の水/蒸気又は任意のその他の質量流量のコマンドに対する補償関数が導き出され得る。明らかに、任意のその他の最も遅い供給系が、補償関数を導き出すために使用され得る。
【0101】
一般に、速い動特性を有する供給路の補償関数
【0102】
【数40】
【0103】
は、最も遅い供給路
【0104】
【数41】
【0105】
と速い供給路
【0106】
【数42】
【0107】
との伝達関数の関数として記述され得る。
【0108】
【数43】
【0109】
すなわち、1つの実施の形態によれば、空気、燃料ガス、液体燃料、水及び蒸気の供給系のうちの最も遅いものの動特性が、動的に補償されないままであり且つ1つの伝達関数で記述される。燃料ガス、液体燃料、水及び蒸気の、より速い動特性を有する供給系のうちの少なくとも1つの供給系の動特性が、1つの伝達関数で記述され、空気、燃料ガス、液体燃料、水及び/又は蒸気の供給系に対する少なくとも1つのコマンド信号の同期補償が、複数の伝達関数を使用して実行される。
【0110】
1つの実施の形態によれば、類似の動特性を有する1つ以上の燃料ガス供給路を備える供給系内では、これらの燃料ガス供給路が、動的に補償されないままであり且つ1つの伝達関数で記述される。空気の供給系の動特性が、複数の伝達関数で記述され且つ動的に補償される。空気供給に対するコマンド信号の動的補償及び/又は加速が、当該複数の伝達関数を使用して計算される。
【0111】
1つのさらなる実施の形態では、異なる動特性を有する幾つかの燃料ガス供給系を備える供給系内では、最も遅い燃料ガス供給系の動特性が、動的に補償されないままである。空気供給系並びにより速い燃料ガス及び/又は液体燃料の供給系の動特性が、複数の伝達関数で記述される。空気供給路並びにより速い燃料ガス及び/又は液体燃料供給路に対するコマンド信号が、動的に補償される。この場合、当該動的補償及び/又は加速が、当該複数の伝達関数から導き出される。
【0112】
当該方法のほかに、このような方法を実施するために設計されているガスタービン用の制御系が、本発明の課題である。
【0113】
当該制御系は、可変入り口静翼を有する圧縮機、燃焼器、タービン、制御装置、測定装置、アクチュエーター、吸入空気供給路並びに燃料ガス及び/又は液体燃料及び/又は水及び/又は蒸気用の供給路を備えるガスタービンを制御するために設計されている。
【0114】
当該制御系は、吸入空気の質量流量並びに燃料ガスの質量流量、液体燃料の質量流量、水の質量流量及び蒸気の質量流量のうちの少なくとも1つの質量流量に対するコマンド値を決定するために設計されている。本発明によれば、当該制御系は、燃焼器に流入する少なくとも1つの主要な質量流量を制御するための動的補償器をさらに有する。この場合、当該主要な質量流量には、空気、燃料ガス及び/又は液体燃料及び/又は水及び/又は蒸気の質量流量が挙げられる。
【0115】
燃焼器に到達する燃料、水、蒸気及び燃焼空気の質量流量の過度変化が同期するように、様々な質量流量供給系の異なる供給系動特性を補償するため、少なくとも1つのコマンド信号が、過渡運転中に補正される。当該複数の過渡変化を同期させることによって、燃焼器に到達する流体の空気に対する燃料の比が、燃焼限界内で保持され、又は適用可能であるならば、当該流体の燃料に対する蒸気及び/又は水の比も、燃料限界内で保持される。
【0116】
1つの実施の形態によれば、コマンド実効値の値が、運転中により速い過渡変化を可能にするために動的に補償される前又は後に、空気、燃料ガス、液体燃料、水及び/又は蒸気の供給系の遅い動特性を緩和させるため、制御系が、加速器をさらに有する。この加速器は、燃料供給用の動的補償器、水若しくは蒸気供給用の動的補償器及び/又は空気供給用の動的補償器と組み合わせてもよい。
【0117】
さらなる実施の形態によれば、空気供給系用の動的補償器が、1つの伝達関数を有する。この伝達関数は、空気、燃料ガス、液体燃料、水及び蒸気の供給系のうちの少なくとも1つの供給系の動特性を記述する。
【0118】
さらなる実施の形態によれば、ガスタービンを制御するための制御系が、燃焼器の最も遅い供給系に対するコマンド信号用の動的補償器を有さないものの、1つの動的補償器が、より速い動特性を有する少なくとも1つの供給系に対して提供される。このことは、コマンド信号が最も遅い信号を制御するために直接使用されることを意味する。より具体的には、動的補償器が、空気、燃料ガス、液体燃料、水及び蒸気の最も遅い供給系に対して提供されず、燃料ガス、液体燃料、水及び蒸気の供給系のうちのより速い動特性を有する少なくとも1つの供給系に対して提供される。
【0119】
当該制御系のもう1つのより具体的な実施の形態では、動的補償器が、燃料ガス供給路に対して提供されず、1つの動的補償器が、空気の供給系に対して提供される。
【0120】
当該制御系のほかに、このような制御系を有するガスタービンが、本発明の課題である。
【0121】
ラプラス変換された周波数領域では、物理的な出力変数が、ラプラス変換の関数によって表現され得る。これらの伝達関数のパラメーターが、複数のステップ応答試験によって確認され得る。これらのステップ応答試験は、実際の機関に基づいて又は精密な動的モデルによって実施され得る。
【図面の簡単な説明】
【0122】
【図1】制御装置、アクチュエーター、制御線、及び燃焼器までの供給路を有する従来のガスタービン制御系の一例を示す。
【図2】制御装置、動的補償器、制御線、アクチュエーター、及び燃焼器までの供給路を有する本発明によるガスタービン制御系の1つの実施の形態を示す。
【図3】制御装置、動的補償器、アクチュエーター、制御線、及び燃焼器までの供給路を有する本発明による制御系を備えるガスタービンの1つの実施の形態を示す。
【発明を実施するための形態】
【0123】
以下に、本発明、その特徴及び利点を図面に基づいてより詳細に説明する。
【0124】
以下では、同じ構成要素又は機能的に等しい構成要素は、同じ記号で付記されている。以下に示された値及び寸法の列挙は、代表的な値にすぎず、本発明をこのような寸法に決して限定するものではない。
【0125】
図2は、本発明によるガスタービンの制御系30の代表的な実施の形態を示す。図2は、図1に基づく。制御装置10、制御線11,...,19、アクチュエーター41,...,49及び燃焼器までの供給路21,...,29が示されている。さらに、図2の制御系30が、動的補償器31,...,39を有する。コマンド実行時の燃料の質量流量
【0126】
【数44】
【0127】
が、燃料供給路用の動的補償器31,...,33によって補償され、コマンド実行時の水/蒸気の質量流量
【0128】
【数45】
【0129】
が、水/蒸気供給路用の動的補償器34,...,36によって補償され、コマンド実行時の空気の質量流量
【0130】
【数46】
【0131】
が、空気供給路用の動的補償器37,...,39によって補償される。
【0132】
図1及び3の例では、水及び蒸気が、オプションとして提供される。しかしながら、このことは、決して限定するものではなく、本発明は、希望通りの水及び蒸気の注入を伴うガスタービンに対して実施されてもよい。
【0133】
図3は、本発明による制御系30を有するガスタービン1の代表的な実施の形態を示す。ガスタービン1は、制御装置10、動的補償器31,32,37、アクチュエーター41,42,47、制御線11,12,17及び燃焼器3までの供給路21,22,27を有する。
【0134】
図3のガスタービン1は、2つの燃料ガス供給路21,22を有する、すなわち主バーナー群に対する1つの燃料ガス供給路とパイロットバーナー群に対するもう1つの燃料ガス供給路とを有する。当該主バーナー群は、予備混合群であり且つ遥かにより厳しいリッチ限界とリーン限界とを有する。この主バーナー群は、燃焼器の運転範囲を決定する。
【0135】
図3中の
【0136】
【数47】
【0137】
【数48】
【0138】
及び
【0139】
【数49】
【0140】
は、燃焼器の吸入口での、主燃料ガス、パイロットガス及び空気の質量流量である。
【0141】
【数50】
【0142】
及び
【0143】
【数51】
【0144】
は、アクチュエーター41,42つまり燃料ガスの制御弁での燃料ガスの質量流量である。空気の質量流量用のアクチュエーター47は、可変入り口静翼(VIGV)である。当該アクチュエーターでの空気の質量流量
【0145】
【数52】
【0146】
は、圧縮機の吸入口での空気の質量流量である。制御装置10が、主燃料に対する質量流量のコマンド
【0147】
【数53】
【0148】
を生成し、パイロット燃料に対する質量流量
【0149】
【数54】
【0150】
を生成し、空気流に対する質量流量
【0151】
【数55】
【0152】
を生成する。これらの質量流量のコマンドが、燃料31,32用の動的補償器及び空気37用の動的補償器内で様々な動特性に関して補償され、当該補償されたコマンド
【0153】
【数56】
【0154】
【数57】
【0155】
及び
【0156】
【数58】
【0157】
が、アクチュエーター41,42,47に対して送信される。
【0158】
一般に、空気の質量流量のコマンド
【0159】
【数59】
【0160】
の代わりに、VIGVのコマンドθVIGVCMDが、制御装置10によって生成される。さらに、一般に、燃料の質量流量のコマンド
【0161】
【数60】
【0162】
及び
【0163】
【数61】
【0164】
が、弁行程に変換される。簡略化のために、VIGVの位置及び制御弁の行程の代わりに、質量流量が、その後も依然として使用される。
【0165】
これらの燃料ガス供給路は、一般に大きい容積の燃料供給系8,9を有する。これらの燃料供給系8,9の動特性が、
【0166】
【数62】
【0167】
【数63】
【0168】
にしたがう伝達遅れを伴う一次遅れによって近似され得る。
【0169】
この場合、
【0170】
【数64】
【0171】
及び
【0172】
【数65】
【0173】
は、主ガス供給路21及びパイロットガス供給路22であり、
【0174】
【数66】
【0175】
及び
【0176】
【数67】
【0177】
は、燃料ガス供給系の容積に依存する時定数である。
【0178】
圧縮機2が、空気を燃焼器3に対して供給し且つその質量流量を制御するために可変入り口静翼(VIGV)47を使用する。この可変入り口静翼(VIGV)47の動特性が、
【0179】
【数68】
【0180】
にしたがう伝達遅れを伴う二次遅れによって近似され得る。
【0181】
この場合、Lairは、圧縮機2の伝達遅れ時間であり、tVIGVは、VIGVの時定数であり、tairは、圧縮機の容積に依存する時定数である。
【0182】
一般に、tmain及びtpilotは、tVIGV及びtairより遥かに大きく、Lmain及びLpilotは、Lairより長い。したがって、燃料ガス供給路21,22は、圧縮機2より遅い動特性を有する。
【0183】
方程式7及び9に関しては、アクチュエーター41,42の動特性が、燃料供給路21,22の動特性より速く、当該アクチュエーター41,42の動特性が、完全に較正されることが推測され得る。したがって、方程式7及び9が適用され得る。空気供給路(圧縮機2)が速い供給路であり、且つ、主燃料ガス供給路21が最も遅い供給路である場合に、補償が、主燃料に対して適用されないならば、方程式21及び23が、伝達関数Gmain(s)及びGair(s)を得るために使用され得、パイロットガスに対する所要の補償関数:
【0184】
【数69】
【0185】
、及び、空気の質量流量に対する所要の補償関数:
【0186】
【数70】
【0187】
を得るために方程式20に挿入され得る。
【0188】
当該供給系の動特性を加速させるため、補償器(1+tmain・s)/(1+taccel・s)が選択され得る。この場合、taccelは、仮想時定数である。この仮想時定数は、当該最も遅い供給路の時定数より小さくなくてはならない。つまりこの場合は、当該補償器に位相を進ませるため、この仮想時定数が、主燃料ガス供給路の時定数tmainより小さくなくてはならない。
【0189】
当該補償器を当該速い供給系のための方程式24及び25に適用することによって、加速されたパイロットガスに対する補償関数:
【0190】
【数71】
【0191】
、及び、加速された空気の質量流量に対する補償関数
【0192】
【数72】
【0193】
が得られる。
【0194】
結果として得られる主燃料ガスの質量流量に対する補償関数は、加速用の補償器(1+tmain・s)/(1+taccel・s)の1倍である:
【0195】
【数73】
【0196】
当該アクチュエーターの動特性が、燃料供給路の動特性と比べて速く、当該アクチュエーターの動特性が、完全に較正されることが推測され得るときは、方程式7及び8が適用され得、当該補償された質量流量が、アクチュエーターの質量流量に等しい。したがって、方程式26及び27がそれぞれ、方程式21及び22に適用され得、同様に方程式28が、方程式23に適用され得る。これらの全ての方程式から、以下の加速された全体の伝達関数G″(s)が得られる:
【0197】
【数74】
【0198】
このことは、燃焼器の吸入口での、燃料ガスの質量流量及び空気の質量流量が、方程式26−28で規定された補償器を実現させることによって同期され得且つ加速され得ることを意味する。
【0199】
仮想時定数taccelは、慎重に決定されなければならない。一方では、この仮想時定数taccelは、tmainより小さくなくてはならない。他方では、この仮想時定数taccelは、小さすぎてはならない。加速度が高すぎる、つまり仮想時定数taccelが小さすぎるときは、閉ループ制御の全体が、不安定になりうる。動的システムの顕著に安定な緩和を可能にするためには、主時定数tmainに対する加速時定数taccelの比は、一般に0.2−0.8の範囲内、好ましくは0.4−0.6の範囲内にある。
【0200】
したがって、本発明の思想又は本質的な特徴から離れることなしに、本発明がその他の特殊な形態で具体化され得ることが、当業者によって認識される。したがって、ここで開示された実施の形態は、全ての観点において例示とみなされ且つ限定されるべきものではない。本発明の範囲は、上記の説明ではなくて添付された特許請求の範囲によって示される。本発明の意味及び範囲及び同意義内での起こる全ての変更は、本発明に包含されるとみなされる。
【符号の説明】
【0201】
1 ガスタービン
2 圧縮機
3 燃焼器
4 タービン
5 発電機
6 吸入空気
7 排ガス
8 主燃料ガス供給系
9 パイロットガス供給系
10 制御装置
11,...,13 燃料供給用の制御線
14,...,16 水及び/又は蒸気供給用の制御線
17,...,19 空気供給用の制御線
21,...,23 燃料供給路
24,...,26 水及び/又は蒸気供給路
27,...,29 空気供給路
30 制御系
31,...,33 燃料供給用の動的補償器
34,...,36 動的補償器水及び/又は蒸気供給用の動的補償器
37,...,39 空気供給用の動的補償器
41,...,43 燃料供給用のアクチュエーター
44,...,46 水及び/又は蒸気供給用のアクチュエーター
47,...,49 空気供給用のアクチュエーター
dm/dtmainCMBST 燃焼器の吸入口での主燃料ガスの質量流量
dm/dtpilotCMBST 燃焼器の吸入口でのパイロットガスの質量流量
dm/dtairCMBST 燃焼器の吸入口での空気の質量流量
dm/dtfuel,iCMBST 燃焼器の吸入口での燃料の質量流量i
dm/dtw/s,jCMBST 燃焼器の吸入口での水/蒸気の質量流量j
dm/dtair,kCMBST 燃焼器の吸入口での空気の質量流量k
dm/dtmainACTUR アクチュエーターでの主燃料の質量流量
dm/dtpilotACTUR アクチュエーターでのパイロット燃料ガスの質量流量
dm/dtairACTUR アクチュエーター、つまりVIGVでの空気の質量流量
dm/dtfuel,iACTUR アクチュエーターでの燃料の質量流量i
dm/dtw/s,jACTUR アクチュエーターでの水/蒸気の質量流量j
dm/dtair,kACTUR アクチュエーター、つまりVIGVでの空気の質量流量k
dm/dtmainCMD 制御装置10によって生成された主燃料の質量流量のコマンド
dm/dtpilotCMD 制御装置10によって生成されたパイロット燃料の質量流量のコマンド
dm/dtairCMD 制御装置10によって生成された空気の質量流量のコマンド
dm/dtfuel,iCMD 制御装置10によって生成された燃料の質量流量のコマンドi
dm/dtw/s,jCMD 制御装置10によって生成された水/蒸気の質量流量のコマンドj
dm/dtair,kCMD 制御装置10によって生成された空気の質量流量のコマンドk
dm/dtmainCOMP 燃料供給用の動的補償器31によって生成された主燃料の補償された質量流量のコマンド
dm/dtpilotCOMP パイロット燃料供給用の動的補償器32によって生成されたパイロット燃
料の補償された質量流量のコマンド
dm/dtairCOMP 空気供給用の動的補償器37によって生成された空気の補償された質量流量のコマンド
dm/dtfuel,iCOMP 燃料供給用の動的補償器31,...,33によって生成された燃料の補償されたコマンドi
dm/dtw/s,jCOMP パイロット燃料供給用の動的補償器34,...,36によって生成された水/蒸気の補償されたコマンドj
dm/dtair,kCOMP 吸気供給用の動的補償器37,...,39によって生成された空気の質量流量の補償されたコマンドk
VIGV 可変入り口静翼
θVIGV 可変入り口静翼の仮想の位置
θVIGV,cmd 可変入り口静翼のコマンド実行時の位置
θVIGV,real 可変入り口静翼の位置
【特許請求の範囲】
【請求項1】
過渡運転中にガスタービン(1)を運転するための方法であって、
前記ガスタービン(1)が、可変入り口静翼(47)を有する圧縮機(2)、燃焼器(3)、タービン(4)、制御装置(10)、測定装置、アクチュエーター(41,...,49)、吸入空気供給路(17,...,19)並びに燃料ガス及び/若しくは液体燃料用の供給路(11,...,13)並びに/又は水及び/又は蒸気用の供給路(14,...,16)を備え、
前記制御装置(10)が、吸入空気の質量流量(dm/dtair,kCMD)に対するコマンド値並びに燃料の質量流量(dm/dtfuel,iCMD)と水及び/若しくは蒸気の質量流量(dm/dtw/s,jCMD)とのうちの少なくとも1つの質量流量に対するコマンド値を決定する当該方法において、
空気に対する燃料の比が、燃焼限界内に保持されるように、これらの供給系のシステム動特性の違いを補償するため、当該補償によって、前記燃焼室(3)に流入する燃料の質量流量(dm/dtfuel,iCMBST)、水及び/若しくは蒸気の質量流量(dm/dtw/s,jCMBST)並びに/又は燃焼空気の質量流量(dm/dtairCMBST)の結果として起こる変化を同期させるため、少なくとも1つのコマンド値が、動的に補償されることを特徴とする方法。
【請求項2】
複数の前記供給系のシステム動特性の違いを補償するため、当該補償によって、前記ガスタービン(1)の前記燃焼器(3)に流入する空気、燃料ガス、液体燃料、水及び/又は蒸気の質量流量(dm/dtairCMBST,dm/dtfuel,iCMBST,dm/dtw/s,jCMBST)の結果として起こる変化を同期させるため、少なくとも1つのコマンド値(dm/dtair,kCMD,dm/dtfuel,iCMD,dm/dtw/s,jCMD)が、動的に補償される結果、火炎の安定性が維持されることを特徴とする請求項1に記載の方法。
【請求項3】
少なくとも1つのコマンド値(dm/dtair,kCMD,dm/dtfuel,iCMD,dm/dtw/s,jCMD)が、運転中のより速い過渡変化を可能にするために動的に補償される前又は後に、当該コマンド値の変化が、空気、燃料ガス、液体燃料、水及び/又は蒸気の供給系の遅い動特性を緩和させるために加速されることを特徴とする請求項1又は2に記載の方法。
【請求項4】
空気、燃料ガス、液体燃料、水及び蒸気の供給系のうちの少なくとも2つの供給系の動特性が、伝達関数で記述されること、及び、当該燃料ガス、液体燃料、水及び/又は蒸気の供給系に対する少なくとも1つのコマンド信号の動的な補償及び/又は加速が、前記伝達関数に基づいて実行されることを特徴とする請求項1〜3のいずれか1項に記載の方法。
【請求項5】
空気、燃料ガス、液体燃料、水及び蒸気の供給系のうちの最も遅い供給系の動特性が、1つの伝達関数で記述され、残りの供給系が、動的に補償されないこと、
燃料ガス、液体燃料、水及び蒸気の供給系のうちの、より速い動特性を有する少なくとも1つの供給系の動特性が、1つの伝達関数で記述されること、及び
空気、燃料ガス、液体燃料、水及び/又は蒸気の、より速い動特性を有する供給系に対する少なくとも1つのコマンド信号の動的補償が、これらの伝達関数を使用して実行されることを特徴とする請求項1〜4のいずれか1項に記載の方法。
【請求項6】
前記燃料ガス供給系の動特性が、動的に補償されないままであること、
前記供給系の動特性が、複数の前記伝達関数で記述されること、
前記空気供給系に対するコマンド命令の動的な補償及び/又は加速が、複数の前記伝達関数を使用して実行されることを特徴とする請求項1〜4のいずれか1項に記載の方法。
【請求項7】
最も遅い前記燃料ガス供給系の動特性が、動的に補償されないままであること、少なくとも1つの空気供給系の動特性並びに/又はより速い燃料ガス供給系及び/若しくは液体燃料供給系の動特性が、複数の伝達関数で記述されること、及び
少なくとも1つの空気供給系並びに/又はより速い燃料ガス供給系及び/若しくは液体燃料供給系に対するコマンド信号の動的な補償及び/又は加速が、補償されたコマンド信号(dm/dtair,kCOMP,dm/dtfuel,iCOMP,dm/dtw/s,jCOMP)を生成するために複数の前記伝達関数を使用して実行されることを特徴とする請求項1〜4のいずれか1項に記載の方法。
【請求項8】
ガスタービン(1)を制御するための制御系(30)であって、
前記ガスタービン(1)が、可変入り口静翼(47)を有する圧縮機(2)、燃焼器(3)、タービン(4)、制御装置(10)、測定装置、アクチュエーター(41,...,49)、吸入空気供給路(27,...,29)並びに燃料ガス及び/若しくは液体燃料用の供給路(21,...,23)並びに/又は水及び/若しくは蒸気用の供給路(24,...,26)を備え、
前記制御装置(10)が、吸入空気の質量流量(dm/dtair,kCMD)に対するコマンド値並びに燃料の質量流量(dm/dtfuel,iCMD)と水及び/若しくは蒸気の質量流量(dm/dtw/s,jCMD)とのうちの少なくとも1つの質量流量に対するコマンド値を決定する当該制御系(30)において、
空気に対する燃料の比が、燃焼限界内に保持されるように、これらの供給系の動特性の違いを補償するため、及び、前記燃焼室(3)に流入する燃料、水、蒸気及び/又は燃焼空気の質量流量(dm/dtairCMBST,dm/dtfuel,iCMBST,dm/dtw/s,jCMBST)の結果として起こる変化を同期させるため、前記制御系(30)が、前記燃焼器(3)のために、前記燃料供給用の動的補償器(31,...,33)と前記水及び/又は蒸気供給用の動的補償器(34,...,36)とのうちの少なくとも1つの補償器並びに前記空気供給用の動的補償器(37,...,39)を有することを特徴とする制御系(30)。
【請求項9】
前記コマンド値が、運転中のより速い過渡変化を可能にするために動的に補償される前又は後に、空気、燃料ガス、液体燃料、水及び/又は蒸気の供給系の遅い動特性を緩和させるため、燃料供給用の前記動的補償器(31,...,33)と、水又は蒸気供給用の前記動的補償器(34,...,36)と、空気供給用の前記動的補償器(37,...,39)とのうちの少なくとも1つの補償器が、加速器を有することを特徴とする請求項8に記載のガスタービン(1)を制御するための制御系(30)。
【請求項10】
燃料供給用の前記動的補償器(31,...,33)と、水又は蒸気供給用の前記動的補償器(34,...,36)と、空気供給用の前記動的補償器(37,...,39)とのうちの少なくとも1つの補償器が、空気、燃料ガス、液体燃料、水及び蒸気の供給系のうちの少なくとも1つの供給系の動特性を記述する伝達関数を有することを特徴とする請求項8又は9に記載のガスタービン(1)を制御するための制御系(30)。
【請求項11】
動的補償器(31,...,39)が、空気、燃料ガス、液体燃料、水、及び蒸気の供給系のうちの最も遅い供給系に対するコマンド信号のために提供されないこと、及び
動的補償器(31,...,39)が、燃料ガス、液体燃料、水及び蒸気の、より速い動特性を有する供給系のうちの少なくとも1つの供給系のために供給されることを特徴とする請求項8〜10のいずれか1項に記載のガスタービン(1)を制御するための制御系(30)。
【請求項12】
動的補償器(31,...,33)が、燃料ガス供給路のために供給されないこと、及び
動的補償器(37,...,39)が、空気供給系のために提供されることを特徴とする請求項8〜11のいずれか1項に記載のガスタービン(1)を制御するための制御系(30)。
【請求項13】
ガスタービン(1)において、
このガスタービン(1)は、請求項8〜12のいずれか1項に記載の制御系(30)を有する当該ガスタービン(1)。
【請求項1】
過渡運転中にガスタービン(1)を運転するための方法であって、
前記ガスタービン(1)が、可変入り口静翼(47)を有する圧縮機(2)、燃焼器(3)、タービン(4)、制御装置(10)、測定装置、アクチュエーター(41,...,49)、吸入空気供給路(17,...,19)並びに燃料ガス及び/若しくは液体燃料用の供給路(11,...,13)並びに/又は水及び/又は蒸気用の供給路(14,...,16)を備え、
前記制御装置(10)が、吸入空気の質量流量(dm/dtair,kCMD)に対するコマンド値並びに燃料の質量流量(dm/dtfuel,iCMD)と水及び/若しくは蒸気の質量流量(dm/dtw/s,jCMD)とのうちの少なくとも1つの質量流量に対するコマンド値を決定する当該方法において、
空気に対する燃料の比が、燃焼限界内に保持されるように、これらの供給系のシステム動特性の違いを補償するため、当該補償によって、前記燃焼室(3)に流入する燃料の質量流量(dm/dtfuel,iCMBST)、水及び/若しくは蒸気の質量流量(dm/dtw/s,jCMBST)並びに/又は燃焼空気の質量流量(dm/dtairCMBST)の結果として起こる変化を同期させるため、少なくとも1つのコマンド値が、動的に補償されることを特徴とする方法。
【請求項2】
複数の前記供給系のシステム動特性の違いを補償するため、当該補償によって、前記ガスタービン(1)の前記燃焼器(3)に流入する空気、燃料ガス、液体燃料、水及び/又は蒸気の質量流量(dm/dtairCMBST,dm/dtfuel,iCMBST,dm/dtw/s,jCMBST)の結果として起こる変化を同期させるため、少なくとも1つのコマンド値(dm/dtair,kCMD,dm/dtfuel,iCMD,dm/dtw/s,jCMD)が、動的に補償される結果、火炎の安定性が維持されることを特徴とする請求項1に記載の方法。
【請求項3】
少なくとも1つのコマンド値(dm/dtair,kCMD,dm/dtfuel,iCMD,dm/dtw/s,jCMD)が、運転中のより速い過渡変化を可能にするために動的に補償される前又は後に、当該コマンド値の変化が、空気、燃料ガス、液体燃料、水及び/又は蒸気の供給系の遅い動特性を緩和させるために加速されることを特徴とする請求項1又は2に記載の方法。
【請求項4】
空気、燃料ガス、液体燃料、水及び蒸気の供給系のうちの少なくとも2つの供給系の動特性が、伝達関数で記述されること、及び、当該燃料ガス、液体燃料、水及び/又は蒸気の供給系に対する少なくとも1つのコマンド信号の動的な補償及び/又は加速が、前記伝達関数に基づいて実行されることを特徴とする請求項1〜3のいずれか1項に記載の方法。
【請求項5】
空気、燃料ガス、液体燃料、水及び蒸気の供給系のうちの最も遅い供給系の動特性が、1つの伝達関数で記述され、残りの供給系が、動的に補償されないこと、
燃料ガス、液体燃料、水及び蒸気の供給系のうちの、より速い動特性を有する少なくとも1つの供給系の動特性が、1つの伝達関数で記述されること、及び
空気、燃料ガス、液体燃料、水及び/又は蒸気の、より速い動特性を有する供給系に対する少なくとも1つのコマンド信号の動的補償が、これらの伝達関数を使用して実行されることを特徴とする請求項1〜4のいずれか1項に記載の方法。
【請求項6】
前記燃料ガス供給系の動特性が、動的に補償されないままであること、
前記供給系の動特性が、複数の前記伝達関数で記述されること、
前記空気供給系に対するコマンド命令の動的な補償及び/又は加速が、複数の前記伝達関数を使用して実行されることを特徴とする請求項1〜4のいずれか1項に記載の方法。
【請求項7】
最も遅い前記燃料ガス供給系の動特性が、動的に補償されないままであること、少なくとも1つの空気供給系の動特性並びに/又はより速い燃料ガス供給系及び/若しくは液体燃料供給系の動特性が、複数の伝達関数で記述されること、及び
少なくとも1つの空気供給系並びに/又はより速い燃料ガス供給系及び/若しくは液体燃料供給系に対するコマンド信号の動的な補償及び/又は加速が、補償されたコマンド信号(dm/dtair,kCOMP,dm/dtfuel,iCOMP,dm/dtw/s,jCOMP)を生成するために複数の前記伝達関数を使用して実行されることを特徴とする請求項1〜4のいずれか1項に記載の方法。
【請求項8】
ガスタービン(1)を制御するための制御系(30)であって、
前記ガスタービン(1)が、可変入り口静翼(47)を有する圧縮機(2)、燃焼器(3)、タービン(4)、制御装置(10)、測定装置、アクチュエーター(41,...,49)、吸入空気供給路(27,...,29)並びに燃料ガス及び/若しくは液体燃料用の供給路(21,...,23)並びに/又は水及び/若しくは蒸気用の供給路(24,...,26)を備え、
前記制御装置(10)が、吸入空気の質量流量(dm/dtair,kCMD)に対するコマンド値並びに燃料の質量流量(dm/dtfuel,iCMD)と水及び/若しくは蒸気の質量流量(dm/dtw/s,jCMD)とのうちの少なくとも1つの質量流量に対するコマンド値を決定する当該制御系(30)において、
空気に対する燃料の比が、燃焼限界内に保持されるように、これらの供給系の動特性の違いを補償するため、及び、前記燃焼室(3)に流入する燃料、水、蒸気及び/又は燃焼空気の質量流量(dm/dtairCMBST,dm/dtfuel,iCMBST,dm/dtw/s,jCMBST)の結果として起こる変化を同期させるため、前記制御系(30)が、前記燃焼器(3)のために、前記燃料供給用の動的補償器(31,...,33)と前記水及び/又は蒸気供給用の動的補償器(34,...,36)とのうちの少なくとも1つの補償器並びに前記空気供給用の動的補償器(37,...,39)を有することを特徴とする制御系(30)。
【請求項9】
前記コマンド値が、運転中のより速い過渡変化を可能にするために動的に補償される前又は後に、空気、燃料ガス、液体燃料、水及び/又は蒸気の供給系の遅い動特性を緩和させるため、燃料供給用の前記動的補償器(31,...,33)と、水又は蒸気供給用の前記動的補償器(34,...,36)と、空気供給用の前記動的補償器(37,...,39)とのうちの少なくとも1つの補償器が、加速器を有することを特徴とする請求項8に記載のガスタービン(1)を制御するための制御系(30)。
【請求項10】
燃料供給用の前記動的補償器(31,...,33)と、水又は蒸気供給用の前記動的補償器(34,...,36)と、空気供給用の前記動的補償器(37,...,39)とのうちの少なくとも1つの補償器が、空気、燃料ガス、液体燃料、水及び蒸気の供給系のうちの少なくとも1つの供給系の動特性を記述する伝達関数を有することを特徴とする請求項8又は9に記載のガスタービン(1)を制御するための制御系(30)。
【請求項11】
動的補償器(31,...,39)が、空気、燃料ガス、液体燃料、水、及び蒸気の供給系のうちの最も遅い供給系に対するコマンド信号のために提供されないこと、及び
動的補償器(31,...,39)が、燃料ガス、液体燃料、水及び蒸気の、より速い動特性を有する供給系のうちの少なくとも1つの供給系のために供給されることを特徴とする請求項8〜10のいずれか1項に記載のガスタービン(1)を制御するための制御系(30)。
【請求項12】
動的補償器(31,...,33)が、燃料ガス供給路のために供給されないこと、及び
動的補償器(37,...,39)が、空気供給系のために提供されることを特徴とする請求項8〜11のいずれか1項に記載のガスタービン(1)を制御するための制御系(30)。
【請求項13】
ガスタービン(1)において、
このガスタービン(1)は、請求項8〜12のいずれか1項に記載の制御系(30)を有する当該ガスタービン(1)。
【図1】

【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−57315(P2013−57315A)
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−194832(P2012−194832)
【出願日】平成24年9月5日(2012.9.5)
【出願人】(503416353)アルストム テクノロジー リミテッド (394)
【氏名又は名称原語表記】ALSTOM Technology Ltd
【住所又は居所原語表記】Brown Boveri Strasse 7, CH−5400 Baden, Switzerland
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2012−194832(P2012−194832)
【出願日】平成24年9月5日(2012.9.5)
【出願人】(503416353)アルストム テクノロジー リミテッド (394)
【氏名又は名称原語表記】ALSTOM Technology Ltd
【住所又は居所原語表記】Brown Boveri Strasse 7, CH−5400 Baden, Switzerland
[ Back to top ]