
キャップ姿勢制御方法およびキャップ姿勢制御機構並びにキャップ姿勢制御装置
【課題】天面を下方に位置させた仰向け姿勢とされたキャップと、天面を上方に位置させた伏せ置き姿勢とされたキャップとが混在して搬送される搬送路において、簡単な構成で確実にキャップを全て一律に仰向け姿勢とすることができるキャップ姿勢制御方法、機構、装置を提供する。
【解決手段】キャップの搬送路10に形成された溝部14を備える反転部13において、該反転部13へ仰向け姿勢で搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部14上を通過させて下流側へ送り、伏せ置き姿勢で搬送されているキャップは該キャップに働く自重により前記溝部14へ搬送方向先端から落下させて前傾させたあと、前記搬送力に基づく慣性力および/または反転のために該キャップに加える外力により、その前傾動作に連続させて、搬送方向下流側へ前転させ、仰向け姿勢に制御して下流側へ送る。
【解決手段】キャップの搬送路10に形成された溝部14を備える反転部13において、該反転部13へ仰向け姿勢で搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部14上を通過させて下流側へ送り、伏せ置き姿勢で搬送されているキャップは該キャップに働く自重により前記溝部14へ搬送方向先端から落下させて前傾させたあと、前記搬送力に基づく慣性力および/または反転のために該キャップに加える外力により、その前傾動作に連続させて、搬送方向下流側へ前転させ、仰向け姿勢に制御して下流側へ送る。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、容器の口元部に対して巻締めなどによって装着されるキャップの姿勢を天面を下方に位置させた仰向け姿勢に矯正するキャップの姿勢制御方法およびキャップ姿勢制御機構と、キャップ姿勢制御機構を備えてキャップの姿勢制御方法を実行し、キャップの姿勢を一律に揃えて次工程へ搬送するためのキャップ姿勢制御装置に関する。
【背景技術】
【0002】
ボトルなどの口元部にキャップを巻締める作業を行うキャップ巻締め装置などには、キャップの表裏をいずれかに揃えて供給する必要があるため、従来より、キャップの表裏をいずれかに揃えるための方法や、姿勢を一律に揃えたキャップを次工程へ供給するための装置が開発されている。
【0003】
例えば、キャップの姿勢制御方法やキャップ姿勢制御装置として、本流となるシュートの途中から分岐させて設けられ、搬送路を軸回り方向に捻転させたツイストシュートを用いるものがある。
【0004】
このツイストシュートを用いるキャップの姿勢制御方法やキャップの姿勢制御装置は、キャップの表裏選別機構を備え、このキャップの表裏選別機構により排除されなかった表裏一方のキャップはそのまま本流を搬送し、キャップの表裏選別機構により排除された表裏他方のキャップは、本流から分岐させたツイストシュートを通過させる際に反転させて、キャップの表裏選別機構により排除されなかった表裏一方のキャップと姿勢(表裏)を揃えた状態で該ツイストシュートを搬送し、次の工程へ供給する(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】実願昭56−065978号公報のマイクロフィルム
【発明の概要】
【発明が解決しようとする課題】
【0006】
このように、前述のツイストシュートを備えるキャップの姿勢制御装置においては、ツイストシュートの通過(自然落下)中にキャップの姿勢を反転させる必要がある。しかしながら、使用するキャップの大きさ、重さ、天面側と開放底面側との重量バランスなどはキャップの品種に応じてまちまちであるため、キャップの品種の型替えがあるときは、前記ツイストシュートの幅および高さ(管状の場合は内径寸法)、長さ、捻転状態等を各キャップに合わせて設計し直し、配設し直さなければならず、型替え作業が大掛かりなものとなっていた。
【0007】
さらに、キャップの搬送路にツイストシュートを配設するための落差、すなわち、自然落下するキャップが反転するために必要な落差を確保しなければならず、さらには、キャップの表裏選別機構により排除されなかったキャップが搬送される本流のシュートと、キャップの表裏選別機構により排除されたキャップが搬送される分流のツイストシュートとを併設するなど、キャップ姿勢制御装置自体が大型化してしまうといった問題もあった。
【0008】
そして、前述のように、本流のシュートとツイストシュートとを併設するような構成は部品点数も多くなり、装置構成が複雑になって、コスト高にもなるといった、別の解決すべき課題も生じる。
【0009】
本発明は前記した問題点を解決するためになされたもので、天面を下方に位置させた仰向け姿勢とされたキャップと、天面を上方に位置させた伏せ置き姿勢とされたキャップとが混在して搬送される搬送路において、簡単な構成で確実にキャップを全て一律に仰向け姿勢とすることができるキャップの姿勢制御方法およびキャップ姿勢制御機構を提供するとともに、前記キャップの姿勢制御方法を実行でき、種々のキャップに対する汎用性があり、構成も簡素化できてコストダウンでき、型替えの作業も簡便かつ低コストであって、メンテナンス性も向上するキャップ姿勢制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
前記課題を解決する本発明のキャップの姿勢制御方法は、一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされたキャップの搬送路に形成された溝部を備える反転部において、該反転部へ仰向け姿勢で搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部上を通過させて下流側へ送り、伏せ置き姿勢で搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させて前傾させたあと、前記搬送力に基づく慣性力および/または反転のために該キャップに加える外力により、その前傾動作に連続させて、搬送方向下流側へ前転させ、仰向け姿勢に制御して下流側へ送ることを特徴とする。
【0011】
このような特徴を備えたキャップの姿勢制御方法によれば、天面を下方に位置させた仰向け姿勢とされたキャップと、天面を上方に位置させた伏せ置き姿勢とされたキャップとが混在して搬送される搬送路において、特段のキャップ姿勢の判別手段を設けなくても、簡単な構成で確実にキャップの姿勢を判別し、伏せ置き姿勢のキャップは反転させることにより、搬送されるキャップを全て一律に仰向け姿勢とすることができる。また、1本の搬送路内においてキャップの姿勢制御を行なうので、構成も簡素化できてコストダウンできる。
【0012】
また、本発明のキャップ姿勢制御機構は、一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされたキャップの搬送路に、該搬送路を上流側搬送部と下流側搬送部とに分断する溝部を有し、該溝部は仰向け姿勢で上流側搬送部を搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部上を通過させて下流側搬送部へ送り、伏せ置き姿勢で上流側搬送部を搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させて前傾させたあと、前記搬送力に基づく慣性力および/または反転のために該キャップに加える外力により、その前傾動作に連続させて、搬送方向下流側へ前転させ、仰向け姿勢に制御して下流側搬送部へ送るように構成された反転部が形成されていることを特徴とする。
【0013】
このような特徴を備えたキャップ姿勢制御機構によれば、天面を下方に位置させた仰向け姿勢とされたキャップと、天面を上方に位置させた伏せ置き姿勢とされたキャップとが混在して搬送される搬送路において、特段のキャップ姿勢の判別手段を設けなくても、簡単な構成で確実にキャップの姿勢を判別し、伏せ置き姿勢のキャップは反転させて、搬送されるキャップを全て一律に仰向け姿勢とすることができる。また、1本の搬送路内においてキャップの姿勢制御を行なうので、構成も簡素化できてコストダウンできる。
【0014】
また、本発明のキャップ姿勢制御装置は、一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされたキャップが仰向け姿勢で搬送されることを要する装置へ向かう搬送路の少なくとも一部を構成するように配設され、一対の側方ガイド部材間において、該搬送路を、上流側搬送面を有する上流側搬送部と、凹状に形成された溝部を備える反転部と、下流側搬送面を有する下流側搬送部とから構成し、前記上流側搬送部の上流側搬送面の下流端には、搬送路の幅方向中央を搬送方向へ延出させて、前記反転部の溝部に搬送方向先端を落下させた伏せ置き姿勢のキャップの凹部内に収まるように形成された延出先端部と、前記延出先端部の前記一対の側壁間における幅方向両側方には、搬送方向先端を前記溝部に落下させた伏せ置き姿勢のキャップの周壁開放端を位置させる反転空隙部が形成されており、前記下流側搬送部における上流端には、搬送方向先端を前記反転部の溝部に落下させた伏せ置き姿勢のキャップを当接係合させる反転当接部が形成され、前記溝部は、仰向け姿勢で上流側搬送部を搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部上を通過させて前記下流側搬送部へ送り、伏せ置き姿勢で上流側搬送部を搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させ、前記延出先端部を凹部に納めるようにして前傾させたあと、その前傾動作に連続させて、前記搬送力に基づく慣性力により前記反転当接部に当接させ、その当接点を回転支点として搬送方向へ前転させ、仰向け姿勢に制御して下流側搬送部へ送るように構成されていることを特徴とする。
【0015】
また、本発明の別のキャップ姿勢制御装置は、一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされたキャップが仰向け姿勢で搬送されることを要する装置へ向かう搬送路の少なくとも一部を構成するように配設され、一対の側方ガイド部材間において、該搬送路を、上流側搬送面を有する上流側搬送部と、凹状に形成された溝部を備える反転部と、下流側搬送面を有する下流側搬送部とから構成し、前記上流側搬送部の上流側搬送面の下流端には、搬送路の幅方向中央を搬送方向へ延出させて、前記反転部の溝部に搬送方向先端を落下させた伏せ置き姿勢のキャップの凹部内に収まるように形成された延出先端部と、前記延出先端部の前記一対の側壁間における幅方向両側方には、搬送方向先端を前記溝部に落下させた伏せ置き姿勢のキャップの周壁開放端を位置させる反転空隙部が形成されており、前記下流側搬送部における上流端には、搬送方向先端を前記反転部の溝部に落下させた伏せ置き姿勢のキャップを当接係合させる反転当接部が形成され、前記反転部には、搬送方向下流側を前記反転部の溝部に落下させた伏せ置き姿勢のキャップに、反転のための外力を付与する反転補助手段が配設されており、前記溝部は、仰向け姿勢で上流側搬送部を搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部上を通過させて前記下流側搬送部へ送り、伏せ置き姿勢で上流側搬送部を搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させ、前記延出先端部を凹部に納めるようにして前傾したあと、その前傾動作に連続させて、前記搬送力に基づく慣性力と前記反転補助手段によって該キャップに加えられる外力とにより、前記反転当接部に当接させ、その当接点を回転支点として搬送方向へ前転させ、仰向け姿勢に制御して下流側搬送部へ送るように構成されていることを特徴とする。
【0016】
そして、本発明のさらに別のキャップ姿勢制御装置は、一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされたキャップが仰向け姿勢で搬送されることを要する装置へ向かう搬送路の少なくとも一部を構成するように配設され、一対の側方ガイド部材間において、該搬送路を、上流側搬送面を有する上流側搬送部と、凹状に形成された溝部を備える反転部と、下流側搬送面を有する下流側搬送部とから構成し、前記上流側搬送部の上流側搬送面の下流端には、搬送路の幅方向中央を搬送方向へ延出させて、前記反転部の溝部に搬送方向先端を落下させた伏せ置き姿勢のキャップの凹部内に収まるように形成された延出先端部と、前記延出先端部の前記一対の側壁間における幅方向両側方には、搬送方向先端を前記溝部に落下させた伏せ置き姿勢のキャップの周壁開放端を位置させる反転空隙部が形成されており、前記下流側搬送部における上流端には、搬送方向先端を前記反転部の溝部に落下させた伏せ置き姿勢のキャップを当接係合させる反転当接部が形成され、前記反転部には、搬送方向下流側を前記反転部の溝部に落下させた伏せ置き姿勢のキャップに、反転のための外力を付与する反転補助手段が配設されており、前記溝部は、仰向け姿勢で上流側搬送部を搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部上を通過させて前記下流側搬送部へ送り、伏せ置き姿勢で上流側搬送部を搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させ、前記延出先端部を凹部に納めるようにして前傾したあと、その前傾動作に連続させて、前記反転補助手段によって該キャップに加えられる外力により、前記反転当接部に当接させ、その当接点を回転支点として搬送方向へ前転させ、仰向け姿勢に制御して下流側搬送部へ送るように構成されていることを特徴とする。
【0017】
このような特徴を備えた前述の各キャップ姿勢制御装置によれば、前記延出先端部がキャップの凹部内に納まるとともに、キャップの周壁開放端が反転空隙部に位置するようにすることで、搬送方向先端を溝部に落下させたキャップが反転する際の回動支点をより搬送方向上流側へ位置させることが可能となる。また、延出先端部が凹部内に納まることで、深く前傾させることができ、この前傾に続く前転を確実に引き起こすことが可能となる。また、前記延出先端部がキャップの凹部内に納まるとともに、キャップの周壁開放端が反転空隙部に位置するようにすれば、溝部の搬送方向寸法を短寸法とすることができ、上流側搬送部を仰向け姿勢で搬送されたキャップを、該キャップに作用する搬送力で、確実かつ安定的に前記溝部を通過させることが可能となる。
【0018】
よって、天面を下方に位置させた仰向け姿勢とされたキャップと、天面を上方に位置させた伏せ置き姿勢とされたキャップとが混在して搬送される搬送路において、特段のキャップ姿勢の判別手段を設けなくても、簡単な構成で確実にキャップの姿勢を判別し、伏せ置き姿勢のキャップを搬送力に基づく慣性力や、反転のために加えられる外力、又はそれらの両方の力を利用して、キャップを全て一律に仰向け姿勢とすることができる。
【0019】
勿論、前記反転補助手段を備えたキャップ姿勢制御装置は、搬送方向先端を前記反転部の溝部に落下させた伏せ置き姿勢のキャップの搬送方向への前転を補助して確実に仰向け姿勢に反転させることができる。
【0020】
また、1本の搬送路内においてキャップの姿勢制御を行なうので、構成も簡素化できてコストダウンできる。
【0021】
さらに、前記上流側搬送部および/または下流側搬送部は、前記一対の側壁間における幅方向の中央部に搬送面が形成され、該搬送面と前記一対の側壁との間には、該搬送面から凹状に形成された搬送路空隙部が形成されていることを特徴とする。
【0022】
このような特徴を備えたキャップ姿勢制御装置によれば、上流側搬送部および/または下流側搬送部の搬送面と、その搬送面を搬送されるキャップとの間の接触面積を小さくすることが可能となる。接触面積が小さくなれば、その間に生じる摩擦を小さくすることが可能となり、キャップを該搬送面上をより円滑にスライド搬送させることが可能となる。
【0023】
また、搬送路の幅方向は種々のキャップに合わせて厳密に設計されている必要がなく、要は、キャップが搬送路空隙部に嵌ることなく、前記上流側搬送面を移動すればよい。よって、一たびの設定状態で、複数種のキャップの姿勢制御を実行することが可能であり、汎用性に優れたものとなる。
【0024】
またさらに、前記一対の側壁はそれぞれ対向方向において接離可能に形成されていることを特徴とする。
【0025】
このような特徴を備えたキャップ姿勢制御装置によれば、前記一対の側壁を対向方向において接離させることで、幅方向寸法を調整することができる。これにより、種々のキャップに対する汎用性をより向上させることができ、型替えの作業も簡便かつ低コストであって、メンテナンス性も向上させることができる。
【0026】
そして、前記上流側搬送部および/または下流側搬送部はキャップの搬送方向において相互に接離可能に形成されていることを特徴とする。
【0027】
このような特徴を備えたキャップ姿勢制御装置によれば、前記上流側搬送部および/または下流側搬送部をキャップを搬送方向において接離させることで、前記溝部の搬送方向寸法を調整することができる。これにより、種々のキャップに対する汎用性をより向上させることができ、型替えの作業も簡便かつ低コストであって、メンテナンス性も向上させることができる。
【発明の効果】
【0028】
このように、本発明のキャップの姿勢制御方法およびキャップ姿勢制御機構によれば、天面を下方に位置させた仰向け姿勢とされたキャップと、天面を上方に位置させた伏せ置き姿勢とされたキャップとが混在して搬送される搬送路において、特段のキャップ姿勢の判別手段を設けずとも、簡単な構成で確実にキャップの姿勢を判別し、伏せ置き姿勢のキャップは反転させて、搬送されるキャップを全て一律に仰向け姿勢とすることができる。
【0029】
さらに、キャップ姿勢制御装置によれば、キャップの姿勢制御方法を実行でき、種々のキャップに対し汎用させることができ、構成も簡素であるのでコストダウンでき、型替えの作業も簡便かつ低コストであって、メンテナンス性も向上させることができる。
【図面の簡単な説明】
【0030】
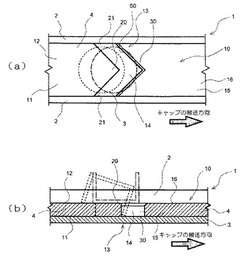
【図1】(a)本発明のキャップ姿勢制御装置の実施形態における要部平面図(伏せ置き姿勢のキャップの破線、仰向け姿勢のキャップの想像線有り(以下、同様に必要に応じ、伏せ置き姿勢のキャップの破線、仰向け姿勢のキャップの想像線有り)、(b)(a)の幅方向中央断面図
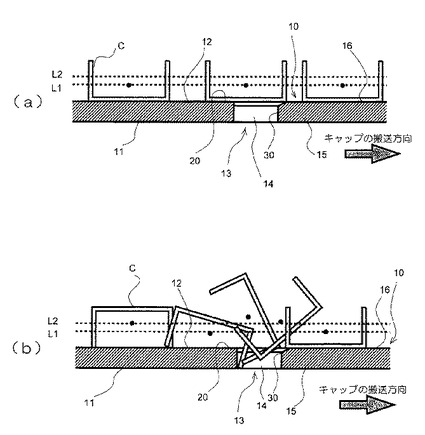
【図2】(a)本発明のキャップ姿勢制御機構およびキャップ姿勢制御方法における仰向け姿勢のキャップの搬送時(姿勢制御時)の姿勢の変化を重心位置に着目して表した説明図、(b)本発明のキャップ姿勢制御機構およびキャップ姿勢制御方法における伏せ置き姿勢のキャップの搬送時(姿勢制御時)の姿勢の変化を重心位置に着目して表した説明図
【図3】(a)図1のキャップ姿勢制御装置の底板に関する変形例を示す要部平面図、(b)(a)の幅方向中央断面図
【図4】(a)図1のキャップ姿勢制御装置の側壁に関する変形例を示す要部平面図、(b)(a)の要部断面図
【図5】(a)図1のキャップ姿勢制御装置の上流側搬送部の下流端の変形例を示す要部平面図、(b)(a)の幅方向中央断面図
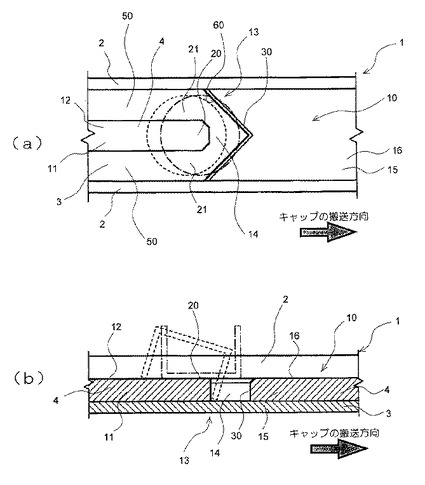
【図6】(a)図1のキャップ姿勢制御装置の上流側搬送部に関する変形例を示す要部平面図、(b)(a)の幅方向中央断面図
【図7】(a)図1のキャップ姿勢制御装置の下流側搬送部の上流端の変形例を示す要部平面図(天井部省略)、(b)(a)の幅方向中央断面図、(c)キャップの形状を示す断面図
【図8】(a)図6のキャップ姿勢制御装置において上流側搬送部と下流側搬送部の間隙寸法を調整可能とした変形例(調整前)を示す要部平面図、(b)(a)の幅方向中央断面図、(c)(a)の要部断面図
【図9】(a)図6のキャップ姿勢制御装置において上流側搬送部と下流側搬送部の間隙寸法を調整可能とした変形例(調整後)を示す要部平面図、(b)(a)の幅方向中央断面図、(c)(a)の要部断面図
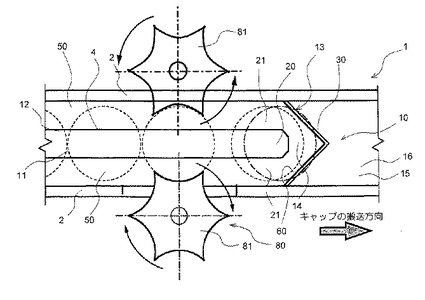
【図10】本発明のキャップ姿勢制御装置において、キャップに搬送力と反転のための搬送の慣性力を付与するための手段として押出装置を設ける場合を示す概略説明図
【図11】(a)本発明のキャップ姿勢制御装置において、キャップを搬送し、該キャップに搬送の慣性力を作用させるための手段としてコンベアベルトを設ける場合を示す要部平面図、(b)(a)の幅方向中央断面図
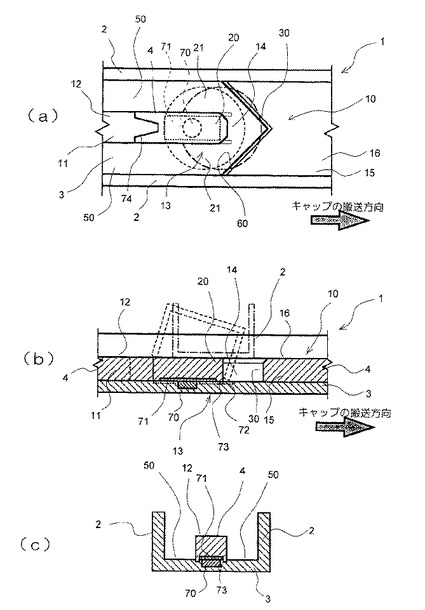
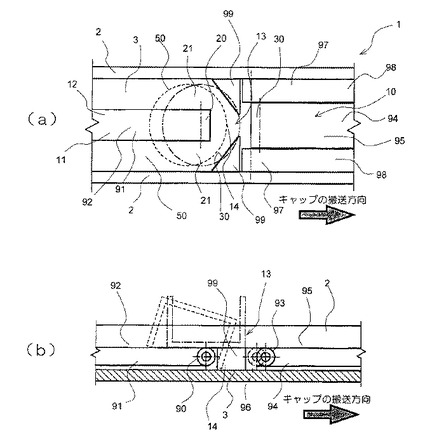
【図12】(a)図6のキャップ姿勢制御装置に、反転補助手段としてのエア供給手段を配設した場合を示す要部平面図、(b)(a)の幅方向中央断面図
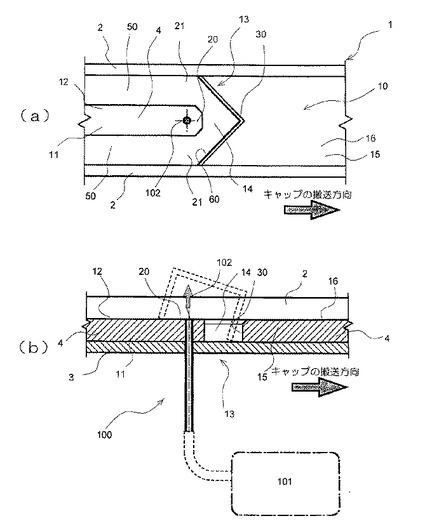
【図13】(a)図6のキャップ姿勢制御装置に、反転補助手段としての押し上げ手段を配設した場合を示す要部平面図、(b)(a)の幅方向中央断面図
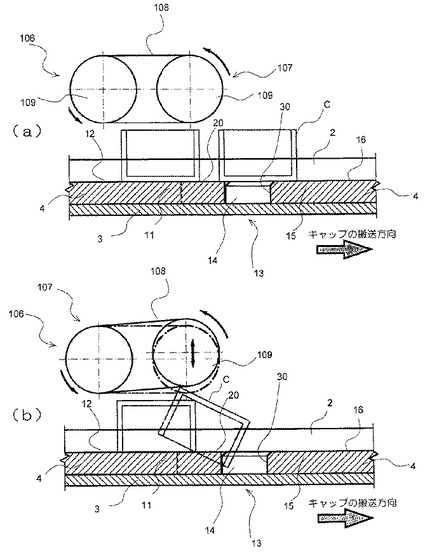
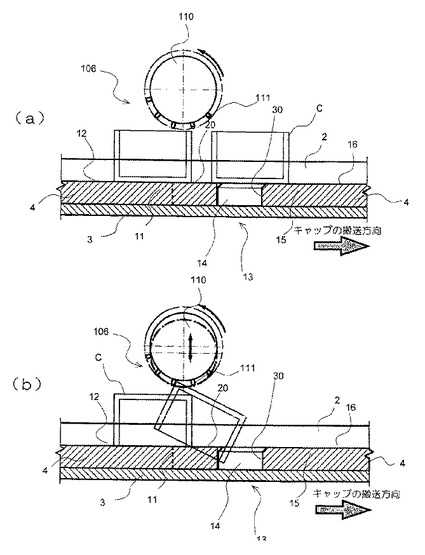
【図14】(a)図1のキャップ姿勢制御装置に、反転補助手段としての補助ローラ手段(ベルトタイプ)を配設した場合における仰向け姿勢のキャップの搬送時の状態を示す要部断面図、(b)図1のキャップ姿勢制御装置に、反転補助手段としての補助ローラ手段(ベルトタイプ)を配設した場合における伏せ置き姿勢のキャップの搬送時の状態を示す要部断面図
【図15】(a)図1のキャップ姿勢制御装置に、反転補助手段としての補助ローラ手段(ローラタイプ)を配設した場合における仰向け姿勢のキャップの搬送時の状態を示す要部断面図、(b)図1のキャップ姿勢制御装置に、反転補助手段としての補助ローラ手段(ローラタイプ)を配設した場合における伏せ置き姿勢のキャップの搬送時の状態を示す要部断面図
【発明を実施するための形態】
【0031】
以下には、本発明のキャップ姿勢制御機構を備え、本発明のキャップの姿勢制御方法を実行することができるキャップ姿勢制御装置について、図1乃至図15を用いて説明する。なお、以下では、特に言及しない限り、キャップの搬送路は公知のシュートと同様、傾斜角度を以て配設されているものとするが、各図においては傾斜角度を考慮せず、搬送面を水平にして視認した場合の視野図を示す。また、各図においては、説明の必要に合わせ、反転部に仰向け姿勢で至ったキャップは想像線(一点鎖線)で示し、反転部に伏せ置き姿勢で至ったキャップは破線で示している(その場合、符号省略)。
【0032】
前述のように、本発明のキャップ姿勢制御機構は、一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされ、重心を高さ方向において天面側に位置させたキャップの搬送路に、該搬送路を上流側搬送部と下流側搬送部とに分断する溝部を有する反転部を備えている。前記溝部は、仰向け姿勢で上流側搬送部を搬送されているキャップは該キャップを搬送する搬送力により、そのまま前記溝部上を通過させて前記下流側搬送部へ送り、伏せ置き姿勢で上流側搬送部を搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させ、前記延出先端部を凹部に納めるようにして前傾させたあと、その前傾動作に連続させて、前記搬送力に基づく慣性力により前記反転当接部に当接させ、その当接点を回転支点として搬送方向へ前転させ、仰向け姿勢に制御して下流側搬送部へ送るように構成されている。
【0033】
本実施形態のキャップ姿勢制御装置は、このキャップ姿勢制御機構を備えつつ、天面を下方に位置させた仰向け姿勢、あるいは、天面を上方に位置させた伏せ置き姿勢で搬送されてくるキャップの姿勢を、全て一律に前記仰向け姿勢として、下流側へ搬送するキャップ姿勢制御装置であり、キャップの搬送路の上流に設けられたキャップ繰り出し装置と、キャップを仰向け姿勢で搬送することを必要とする目的の装置との間をつなぐ搬送路において、直線状に敷設された該搬送路の少なくとも一部を構成するように配設されている。
【0034】
本実施形態のキャップ姿勢制御装置は、キャップの搬送を側方からガイドする側方ガイド部材としての一対の側壁間において、キャップの搬送方向の上流側から順に、上流側搬送面を有する上流側搬送部、凹状に溝形成された反転部、下流側搬送面を有する下流側搬送部を設けて構成されている。換言すれば、前記キャップ姿勢制御装置は、一対の側壁間において搬送路を上流側搬送部と下流側搬送部とに分断する凹状の溝部を有する反転部を備えている。
【0035】
キャップ姿勢制御装置は、前記上流側搬送部が下流側搬送部よりも上位に位置し、キャップ繰り出し部から1つずつ繰り出されるキャップが上流側搬送面および下流側搬送面をスライド移動可能に、全体として傾斜するようにして前記搬送路内に配置されており、このように傾斜角度を持たせて配設することで、キャップには搬送面を滑り落ちる搬送の慣性力が働くように構成されている。よって、その傾斜角度は、キャップの下流側への搬送と、反転部において伏せ置き姿勢のキャップを搬送方向へ反転させるために十分な程度に、該搬送路を移動するキャップに対して搬送の慣性力を作用させることができるように調整可能とされている。
【0036】
具体的には、図1に示すキャップ姿勢制御装置1は、一対の側壁2、2間の下部に板状の底板3が配設されており、その底板3の上面に、上流側搬送部11および下流側搬送部15を構成する板状部材4を、反転部13を構成する溝部14を挟んで離間させるようにして載置し、固定することで、上流側搬送面12、溝部14、下流側搬送面16を上流側から配列させた該キャップ姿勢制御装置1の搬送路10が形成されている。
【0037】
なお、上流側搬送部11、反転部13、下流側搬送部15は、キャップ姿勢制御装置1の板状部材4からなる搬送路10の搬送面を切削して反転部13の溝部14とすると共に、その反転部13よりも搬送方向上流側を上流側搬送部11とし、搬送方向下流側を下流側搬送部15として形成してもよい。
【0038】
また、図1のキャップ姿勢制御装置において、上流側搬送部11の上流側搬送面12の下流端は、該搬送路10の幅方向中央を搬送方向へ延出させた平面形状略三角形に形成され、延出先端部20とされている。この延出先端部20は、仰向け姿勢のキャップCと伏せ置き姿勢のキャップCに対し、上流側搬送部11の搬送面として作用するとともに、反転部13の溝部14に搬送方向先端を落下させた状態の伏せ置き姿勢のキャップCに対しては、該キャップCの凹部内に収まるように構成されている。また、上流側搬送部11の下流端における延出先端部20の両側方に形成された空隙は、反転部13の溝部14に搬送方向先端を落下させた状態の伏せ置き姿勢のキャップCの周壁を位置させる前記反転部13の反転空隙部21とされている。
【0039】
また、下流側搬送部15の下流側搬送面16の上流端には、反転部13において伏せ置き姿勢から前転して仰向け姿勢に反転する際にキャップCの外面が当接し、その当接点が回転支点となる反転当接部30が形成されている。本実施形態においては、搬送路10の下流側へ向かうに従い、搬送路10の幅方向両側から幅方向中央部へ漸次指向し、該搬送路10の幅方向中央部を最も下流側に位置させるように切り欠かれたV字状とされ、該反転部13において伏せ置き姿勢から仰向け姿勢に反転する際にそのV字状の切欠き部60にキャップCの外面が当接し、その当接点が回転支点となる反転当接部30が形成されている。本実施形態において、反転当接部30を構成する下流側搬送部15の下流側搬送面16は、反転部13から下流側へ搬送されるキャップC、特には、反転部13において、仰向け姿勢のキャップCが反転当接部30の鋭角な角に衝突することを防止すると共に、伏せ置き状態から仰向け状態に反転したキャップCの搬送方向への搬送を案内するように、面取り処理が施されている。
【0040】
なお、V字状に形成された反転当接部30は、径寸法や高さ寸法を異ならせた種々のキャップCに対して適用させることができる。つまり、サイズを少々異ならせたキャップCであっても、各キャップCはそれぞれの形状に合わせて前記V字状の切欠き部60のどこかの深さ(搬送方向)位置において、該反転当接部30に係合・当接するので、その当接点を回転支点として反転させることが可能となる。
【0041】
前述のように形成された上流側搬送部11と下流側搬送部15との間に形成された溝部14は、上流側搬送部11の上流側搬送面12をスライドして反転部13に至るキャップCに作用している搬送の慣性力との関係において、仰向け姿勢で移動しつつ該反転部13に至るキャップCについてはその移動を妨げることなくそのまま、その慣性力によって上部を通過させる一方で、伏せ置き姿勢で移動しつつ該反転部13に至るキャップCについては、延出先端部20を該キャップCの凹部内に収めつつ反転部13の溝部14内へ該キャップCの搬送方向先端を自重で落下させて搬送方向へ前傾させ、該キャップCに働く搬送の慣性力により、その前傾する動作に連続させて下流側搬送部15の上流端に当接させ、その当接点を回転支点として該キャップCを搬送方向へ反転させ、仰向け姿勢に矯正した状態でさらに下流側へ移動させるように構成されている。
【0042】
本実施形態においては、反転部13における上流側搬送部11と下流側搬送部15との間隙は、上流側搬送面12を仰向け姿勢で移動するキャップCが搬送路10の幅方向におけるどの位置に至った場合であっても、その重心が溝部14内へ傾く前にその搬送方向先端が下流側搬送面16へ至り、瞬間的には、前記仰向け姿勢のキャップCが上流側搬送面12と下流側搬送面16との間に架け亘されるべく、上流側搬送部11の搬送面の最下流端と下流側搬送部15の搬送面の最上流端との間の寸法が調整されているとともに、上流側搬送面12を伏せ置き姿勢で移動して該反転部13に至ったキャップCの搬送方向下流側に位置する周壁解放端が上流側搬送面12の最下流端から外れて前記溝部14内に自重により落下した時に、該キャップCが前傾し、その前傾動作と連続させて下流側搬送部15の上流端に当接し得る空間を確保して形成されている。
【0043】
さらに言えば、上流側搬送部11と下流側搬送部15は、仰向け姿勢のキャップCについては、作用している搬送の慣性力との関係において、該キャップCが溝内へ向かって傾斜する前にキャップCの重心が下流側搬送面16上に移動可能であること(第1の要件)と、伏せ置き姿勢のキャップCについては、搬送方向先端の周壁開放部を溝部14に落下させて前傾しつつ、さらに、該キャップCに働く搬送の慣性力により下流側へ搬送されたキャップCの外面が、下流側搬送部15の反転当接部30に当接することにより、その当接点を回転支点として前転し、仰向け姿勢となって下流側搬送面16に着座可能であること(第2の要件)の2つの条件を満たすように形成されている。前記第1の要件を満たすために、好ましくは、その重心が上流側搬送面12から外れるときは、必ず、キャップCの天面の一部が下流側搬送面16に至るような位置関係であることが望ましい。仰向け姿勢のキャップCの重心を1つの仮想ライン上で移動させることができるためである。
【0044】
次に、前述の図1のキャップ姿勢制御装置1を用いてキャップCの姿勢を一律に仰向け姿勢に制御して下流側へ搬送する方法、すなわち、本発明のキャップCの姿勢制御機構によりキャップCの姿勢を制御する方法(本発明のキャップの姿勢制御方法)について、図2を用いつつ説明する。
【0045】
本実施形態のキャップ姿勢制御装置1においては、上流に配置されたキャップ繰り出し装置から仰向け姿勢、あるいは、伏せ置き姿勢で間欠的に搬送路10に押し出されたキャップCは、図2に示すように、自身に作用する搬送の慣性力により搬送路10をスライドして下流側へ移動する。
【0046】
キャップCが仰向け姿勢である場合、キャップCは、図2(a)に示すように、天面を搬送路10の搬送面に当接させ、その重心を搬送路10の搬送面と平行で、かつ、搬送面に近い第1仮想ラインL1上に位置させた状態で移動する。
【0047】
そして搬送路10を仰向け姿勢で搬送されるキャップCが、該キャップ姿勢制御装置1が配設された搬送路10部分に至ると、上流側搬送部11の延出先端部20においてその搬送方向先端のみを反転部13の溝部14上に臨ませた状態となるが、その後、さらに自身に作用する搬送の慣性力により下流側に移動する際に、本実施形態のキャップ姿勢制御装置1においては、上流側搬送部11と下流側搬送部15の位置関係は、作用している搬送の慣性力との関係において該キャップCが溝部14内へ向かって傾斜する前に重心を下流側搬送面16上に移動するように形成されているので、該キャップCは、反転部13においてもその重心(図2には黒点で示す)を前下方へ傾けることなく、常に搬送路10の搬送面と平行な第1仮想ラインL1上に置いたそのままの状態で下流側へ搬送される。
【0048】
特に、本実施形態においては、仰向け姿勢のキャップCの重心が上流側搬送面12から外れるときは、キャップCの天面の一部が下流側搬送面16に至るように形成されているので、瞬間的に、上流側搬送面12と下流側搬送面16との間に架け亘された状態となったあと、仰向け姿勢のキャップCが自身に作用する搬送の慣性力によりさらに下流側へ移動することとなる。
【0049】
一方、キャップCが伏せ置き姿勢である場合、キャップCは、図2(b)に示すように、周壁解放端を搬送路10に当接させ、その重心を搬送路10の搬送面と平行で、かつ、第1仮想ラインL1よりも搬送面から離間した第2仮想ラインL2上に位置させた状態で移動する。このとき、該キャップCには、その重力に搬送路10を下流側へ移動する慣性力が作用することは前述の通りであるが、伏せ置き姿勢のキャップCは、仰向け姿勢のキャップCよりも重心が移動面から高い位置にあれば、慣性力の影響を受けて反転し易い状態にある。
【0050】
そして、搬送路10を伏せ置き姿勢で搬送されるキャップCが該キャップ姿勢制御装置1が配設された搬送路10部分に至ると、キャップCは、搬送方向先端に位置する周壁解放端が上流側搬送部11の下流端に形成された延出先端部20を通過したところで、該キャップCの搬送方向先端の周壁解放端が延出先端部20から外れて反転部13の溝部14へ自重により落下するため、キャップCは前傾する。このとき、延出先端部20は、伏せ置き姿勢のキャップCの凹部内に収まり、反転空隙部21には反転部13の溝部14に搬送方向先端を落下させた伏せ置き姿勢のキャップCの周壁解放端が位置する。
【0051】
そして、この前傾動作と同時に、該キャップCに対し、該キャップCがさらに下流側へ移動しようとする慣性力が作用する。このとき、本実施形態のキャップ姿勢制御装置1においては、上流側搬送部11と下流側搬送部15の位置関係は、搬送方向先端の周壁開放端を溝部14に落下させて前傾しつつ、さらに、該キャップCに働く搬送の慣性力により下流側へ搬送された該キャップCの外面が下流側搬送部15の反転当接部30に当接することにより、その当接点を回転支点として前転し、仰向け姿勢となって下流側搬送面16に着座可能とされている。よって、キャップCはその外面を、反転当接部30を含む反転部13の内面に当接させ、その当接点を反転の回転支点として前転し、天面を下流側搬送部15の搬送面に着座する。この仰向け姿勢とされたキャップCは、重心を下流側の搬送路10上における、搬送路10の搬送面と平行な第1仮想ラインL1上に移し、重心を搬送面により近いところに位置させ安定した状態で、さらに下流側へ搬送される。
【0052】
例えば、図2(b)に示すように、反転部13に落下させた伏せ置き姿勢のキャップCを該溝部14内で前傾させたときに、搬送方向先端の周壁開放端が上流側搬送部11に近い位置で反転部13の底板3の上面に当接した場合には、この当接点が第1の回転支点となり、第1の回転支点を回転支点として前転動作をとるキャップCの側壁の天面側が次に当接する前記V字状の反転当接部30の当接点が反転の第2の回転支点となって、該キャップCは搬送方向へ前転し、下流側搬送部15の下流側搬送面16に着座する際には、伏せ置き姿勢から反転して仰向け姿勢に矯正される。
【0053】
このように、本実施形態のキャップ姿勢制御装置およびキャップ姿勢制御方法によれば、天面を下方に位置させた仰向け姿勢、あるいは、天面を上方に位置させた伏せ置き姿勢で間欠的に供給される個々のキャップCの搬送姿勢を、機械的な構成の姿勢判別装置のようなものを配設するまでもなく、結果的に反転部13へ搬送されるキャップCが前傾姿勢をとるか否かにより自動識別し、そして、反転部13において前傾したキャップC、すなわち、伏せ置き姿勢のキャップCは、該キャップCの重心やこのキャップCに作用する搬送の慣性力を利用し、その前傾動作に連続させて搬送方向下流側へ回転させ、全て仰向け姿勢として下流へ供給することができる。
【0054】
また、本実施形態のキャップ姿勢制御装置1においては、1回の設定において様々なキャップCを対象としてその姿勢を制御することが可能であり、仮に、キャップCの品種の型替え等で、設定を変更する必要があったとしても、簡単な作業で設定を変更することができる。このように型替えの作業も簡便かつ低コストであって、メンテナンス性も向上させることができる。
【0055】
また、キャップ姿勢制御装置1自体が極めて簡単な構成であり、キャップCの姿勢制御を1本の搬送路10において行なうことができるので、従来のように本流の他に分流を設けるといった必要がなく、キャップ姿勢制御装置1自体を小型化することができる。
【0056】
以下には、本発明のキャップ姿勢制御装置に関し、前述の実施形態のキャップ姿勢制御装置1の構成の特筆すべき事項や変更可能点等を挙げて説明する。
【0057】
[底板について]
本発明のキャップ姿勢制御装置1において、搬送路10の底板3の配設は必須ではない。
【0058】
図3は、図1に対応させて、前述の実施形態のキャップ姿勢制御から搬送路10の底板3を省略した状態のキャップ姿勢制御装置1を示している。この場合、上流側搬送部11および下流側搬送部15を構成する板状部材4は、例えば、一対の側壁2,2間において、その搬送方向両側を側壁2,2に貼着させて構成することができる。
【0059】
このように、反転部13の溝部14が無底状に形成されていたとしても、搬送されるキャップCに搬送の慣性力が作用することで、伏せ置き姿勢で搬送されていたキャップCが前傾した後の回転中に、その外面を反転当接部30を含む反転部13の内面に点接させ、その当接点を回転支点として該キャップCを前転させることができる。
【0060】
例えば、図3(b)に示すように、搬送方向先端を反転部13に落下させた伏せ置き姿勢のキャップCを該溝部14内で前傾させ、反転動作をとるキャップCの周壁の天面側をV字状の反転当接部30に当接させれば、この当接点が回転支点となり、キャップCを前転させて、伏せ置き姿勢から仰向け姿勢に矯正することができる。
【0061】
[側壁について]
前述の実施形態のキャップ姿勢制御装置1においては、該キャップ姿勢制御装置1における一対の側壁2,2間の寸法、すなわち、搬送路10の幅方向寸法は、キャップCの安定的な搬送を配慮して、該キャップ姿勢制御装置1に供されるキャップCの直径寸法より大きく、搬送を妨げない寸法であることは勿論のこと、上流側搬送部11を搬送される伏せ置き姿勢のキャップCが上流側搬送部11の下流側における幅方向のいかなる位置に至った場合であっても、該キャップCの凹部内に延出先端部20が収まった状態でキャップCが前傾するように設定されている。具体的には、前記一対の側壁2,2間の寸法はキャップCの直径寸法の1.1倍〜1.4倍程度とするとよい。
【0062】
そして、キャップ姿勢制御装置1の一対の側壁2,2は、互いに接離可能に形成し、搬送路10の幅寸法を調整可能としてもよい。
【0063】
すなわち、本発明のキャップ姿勢制御装置1は、一対の側方ガイド部材2、2間に、キャップCの移動面が形成された上流側搬送部11および下流側搬送部15が反転部13を介して配置されている構造であればよく、例えば、図4に示すように、一対の側方搬送ガイド部材2,2のぞれぞれを、縦板状のガイド壁40の下辺部分にスライド板41を配設時における搬送路10側へ延出させて連接し、断面形状をL字状に形成するとともに、このスライド板41に幅方向に延在する長溝状のスライドガイド溝42を穿設し、ガイド壁40を上流側搬送面12および下流側搬送面16よりも上方へ延出させ、対向するガイド壁40,40間を所望の寸法として、該スライドガイド溝42で止めねじ43を用いて底板3の底面に一対の側方ガイド部材2,2を所望の幅で固定する構成とし、該キャップ姿勢制御装置1に供されるキャップCの種類に応じて、適宜、ガイド壁40,40間を所望の寸法を調整するようにしてもよい。
【0064】
このようにキャップ姿勢制御装置1の一対の側壁2,2を互いに接離可能に形成し、搬送路10の幅寸法を調整可能とすることで、該キャップ姿勢制御装置1を用いた姿勢制御の対象となるキャップCの種類を増やすことができる。
【0065】
[上流側搬送部の下流端について]
本発明のキャップ姿勢制御装置1において、延出先端部20および反転空隙部21が形成される上流側搬送部11の下流端についても、前述の実施形態における構成に限るものではない。要は、延出先端部20は、上流側搬送部11の搬送面として作用するとともに、反転部13の溝部14に搬送方向先端を落下させた状態の伏せ置き姿勢のキャップCに対しては該キャップCの凹部内に収まるように形成されていればよく、反転空隙部21は、反転部13の溝部14に搬送方向先端を落下させた状態の伏せ置き姿勢のキャップCの周壁を位置させることができるものであればよい。
【0066】
図5には、前述の実施形態のキャップ姿勢制御装置1との関係において、延出先端部20および反転空隙部21が形成される上流側搬送部11の下流端の形状を異ならせたキャップ姿勢制御装置1を示している。
【0067】
このキャップ姿勢制御装置1の上流側搬送面12の下流端は、幅方向中央を搬送方向へ凸状に延出させて形成されており、その凸状に延出する部分が延出先端部20として、伏せ置き姿勢、仰向け姿勢の両キャップCの上流側搬送面12として作用するとともに、反転部13の溝部14に搬送方向先端を落下させた状態の伏せ置き姿勢のキャップCの凹部内に収まるように形成されている。凸状の延出先端部20は、下流側のコーナー部を反転部13の溝部14の深さ方向に面取り処理されており、上流側搬送部11を搬送されるキャップCが搬送路10の幅方向のいかなる位置に搬送されても、キャップCの凹部内に該延出先端部が収まり易いように形成されている。また、この凸状の延出先端部20の両側方に形成された空隙は、反転空隙部21として作用する。
【0068】
このように形成された上流側搬送部11の下流端においても、凸状に延出する延出先端部20がキャップCの上流側搬送部11の搬送面として作用し、また、前傾する伏せ置き姿勢のキャップCに対しては、その延出先端部20が前傾するキャップCの凹部内に収まるとともに、反転空隙部21にキャップCの周壁が収まることで、反転部13において、伏せ置き姿勢のキャップCに搬送の慣性力を作用させて、前傾姿勢から連続させて反転させることができる。
【0069】
[上流側搬送部(搬送路空隙部)について]
図6には、前述の実施形態のキャップ姿勢制御装置1との関係において、上流側搬送部11(延出先端部20を含む)の構成を異ならせたキャップ姿勢制御装置1を示している。
【0070】
上流側搬送部11は、上流側搬送面12と一対の側壁2,2との間にそれぞれ凹状の空隙からなる搬送路空隙部50が形成されるように、上流側搬送面12が一対の側壁2,2間における幅方向の中央部に位置させて配設されている。
【0071】
このように形成されたキャップ姿勢制御装置1においても、前記一対の側壁2,2間の下部に配設された底板3の上面に、上流側搬送部11および下流側搬送部15を構成する板状部材4を、反転部13を構成する溝部14を挟んで離間させるようにして積層することで、上流側搬送部11および下流側搬送部15並びに反転部13が形成されている点においては、前述の実施形態と同じであるが、この図6に示すキャップ姿勢制御装置1は、上流側搬送部11は、底板3上における搬送路10の幅方向を略3分割する中央の帯状領域に上流側搬送部11を構成する板状部材4を積層することにより形成されている。よって、この上流側搬送部11の上流側搬送面12と一対の側壁2,2との間には、上流側搬送面12と略同幅に底板3を露出させた凹状の空隙からなる搬送路空隙部50,50が形成されている。
【0072】
そして、このキャップ姿勢制御装置1においては、上流側搬送面12の下流端はそのまま延出先端部20として作用し、延出先端部20の両側に位置する搬送路空隙部50の下流端は、反転空隙部21を兼ねることとなる。
【0073】
なお、搬送路空隙部50は、必ずしも底板3を溝内底部に露出させている必要もなく、例えば、上流側搬送部11の上流側搬送面12を切削して、上流側搬送面12と一対の側壁2,2との間に凹状の搬送路空隙部50,50を形成してもよい。
【0074】
要は、このように搬送路空隙部50,50を形成し、上流側搬送面12を搬送路10における幅方向中央部にのみ配設する構成とすることで、上流側搬送路10の上流側搬送面12を移動するキャップCとの摺接面積を小さくすることができるので、摺動摩擦を軽減させて、キャップCの下流側へのスライドを円滑なものとすることができる。
【0075】
また、上流側搬送部11を搬送路10の幅方向中央の帯状領域に形成することにより、キャップCの径方向寸法が多少異なっても、搬送方向先端を反転部13に落下させた伏せ置き姿勢のキャップCの凹部内に延出先端部20を兼ねる該上流側搬送部11の下流側先端を収めることが可能となり、該キャップ姿勢制御装置1をより多くの種類(サイズ)のキャップCに汎用させることが可能となる。
【0076】
[下流側搬送部の上流端について]
本発明のキャップ姿勢制御装置1において、反転当接部30が形成される下流側搬送部15の上流端についても、前述の実施形態における構成に限るものではない。要は、前記溝部14に搬送方向先端を落下させて前傾した伏せ置き姿勢のキャップCを下流側搬送部15の上流端に当接させ、その当接点を回転支点として前転させ、その姿勢を仰向け姿勢とすることができるように反転部13の溝部14を構成できるものであればよい。
【0077】
図7には、前述の実施形態のキャップ姿勢制御装置1との関係において、反転当接部30が形成される下流側搬送部15の上流端の構成を異ならせたキャップ姿勢制御装置1を示している。なお、この図7(b)の断面図には、搬送路10に天井部62を図示している。
【0078】
このキャップ姿勢制御装置1の下流側搬送部15の上流に設けられた反転当接部30には、キャップCの搬送方向へ向かうに従い、搬送路10の幅方向両側から幅方向中央部へ漸次指向するV字状の切欠き部60の奥部(搬送方向下流側部分)に連通させて、キャップCの搬送方向へ向かうに従い拡開する平面形状台形状の反転キャップ収納部61が、該下流側搬送部15の搬送面に凹状に形成されている。
【0079】
なお、図7に示すキャップ姿勢制御装置1について、各部位間寸法の一例を示すと、図7(c)に示すように、キャップCの外形高さ寸法をH、外形直径寸法をDとすると、搬送路10の幅方向寸法はD+2mm、反転部13における奥部の深さ寸法(キャップCの落差)は、切欠き部60、反転キャップ収納部61共にH/2mmとされている。また、前記延出先端部20はその頂部を搬送路10の幅方向中央の仮想線上に位置させ、幅方向中央の仮想線で線対称に形成されており、延出先端部20を構成している前記溝部14の底面からの垂面(延出先端部垂面)は、平面視において45°の角度で幅方向における搬送路10の側方が搬送方向の上流側へ後退するように形成されている。そして、反転当接部30のV字状の切欠き部60を構成する前記溝部14の底面からの垂面(反転当接部30垂面)と、延出先端部20を構成している前記溝部14の底面からの垂面(延出先端部20垂面)は対向させて形成されており、その間隙寸法はD/2mmとされている。
【0080】
また、対で形成される前記境界点の寸法は(√2/2)D−6mm、対の境界点Pを結んだ仮想境界線と幅方向中央の仮想線との交点と前記延出先端部20の最下流端との間の寸法は(√2/4)D+3mm、反転キャップ収納部61の深さ寸法はH−2mmとされている。
【0081】
また、図7のキャップ姿勢制御装置1は、天井部62を設けてキャップCの搬送路10を四面で囲うように構成されているが、上流側搬送面12および下流側搬送面16と天井部62との間隙寸法は、反転部13を除く部分においてはH+2mm、反転部13においては√{(H/2)2+D2}+2mmとされている。
【0082】
このように構成されたキャップ姿勢制御装置1においては、図7(a)、(b)に示すように、溝部14に搬送方向先端を落下させて前傾した伏せ置き姿勢のキャップCは、反転当接部30において、搬送の慣性力が働いた状態でV字状の切欠き部60から反転キャップ収納部61内に臨むようにして嵌合し、側壁を当接させたその当接点、すなわち、前記V字状の切欠き部60と反転キャップ収納部61との境界点Pを回転支点として搬送方向へ前転し、キャップCの一部を反転キャップ収納部61に一時的に収納しつつ、続いて、天面を反転キャップ収納部61の下流側端辺を構成する下流側搬送面16に当接させて搬送方向へ前転し、下流側搬送面16に仰向け姿勢で着座させる。
【0083】
このように、反転するキャップCの一部を反転キャップ収納部61に一時的に収納可能に構成することで、より確実に伏せ置き姿勢のキャップCを仰向け姿勢に反転することができる。
【0084】
[上流側搬送部11と下流側搬送部15の間隙寸法について]
前述のように、本発明のキャップ姿勢制御装置1は、上流側搬送部11と下流側搬送部15の間隙寸法を、キャップCの種類との関係において調整可能に構成してもよい。
【0085】
例えば、図6に示すキャップ姿勢制御装置において、図8、図9に示すように、底板3の上面に磁石70を埋設しておくとともに、底板3の上面に載置させる、例えば、樹脂などのような非磁性体からなる板状部材4に磁石70に吸着する金属板71を埋設しておき、板状部材4の底板3上の所望の位置において、磁石70と金属板71とを吸着させるように構成し、上流側搬送部11および/または下流側搬送部15の互いの距離を接離させる際には、前記上流側搬送部11および/または下流側搬送部15の底面の磁石70に対する吸着位置を搬送方向において前後させることで、簡単に互いの間隙寸法、すなわち、反転部13における溝部14の搬送方向寸法を調整することができる。
【0086】
その際、底板3の上面にキャップCの搬送方向に延在するスライドガイド溝72を形成するとともに、上流側搬送部11および/または下流側搬送部15を構成する板状部材4の底面にスライド係合突起73を形成し、スライドガイド溝72にスライド係合突起73を係合させるようにして底板3の上面に上流側搬送部11および/または下流側搬送部15を配設するとともに、必要に合わせて、上流側搬送部11および/または下流側搬送部15を、スライドガイド溝72内でスライド係合突起73を搬送方向に前後にスライド移動させることができれば、さらに簡便に反転部13における溝部14の搬送方向寸法を調整することが可能となる。
【0087】
その際、上流側搬送部11および/または下流側搬送部15が搬送路10の搬送方向において接離する寸法に合わせ、上流側搬送部11や下流側搬送部15の中間部には、搬送面を移動するキャップCの移動を妨げることがない形状(図8、図9においては、鋭角なV溝)とされた間隙寸法調整用の調整溝74を形成しておく。
【0088】
このように反転部13の搬送方向の間隙寸法を調整することができれば、該キャップ姿勢制御装置1に供されるキャップCに合わせて、該キャップ姿勢制御装置1の駆動前に予め調整することで、伏せ置き姿勢で反転部13へ搬送されたキャップCをより確実に前傾させ、それに連続して前転させることが可能となる。なお、反転部13の搬送方向の間隙寸法を調整するための手段としては、これに限るものではない。例えば、長穴とその長穴内の所望の位置において螺設されるボルトとを組みあわせた公知のスライド機構を利用してもよい。
【0089】
[溝部の底面から上流側搬送面および下流側搬送面までの深さ寸法について]
また、本発明のキャップ姿勢制御装置1においては、上流側搬送部11および下流側搬送部15は、キャップCの種類との関係において、溝部14の底面から上流側搬送面12および下流側搬送面16までの深さ寸法を調整可能としてもよい。
【0090】
例えば、前述の実施形態の場合において、底板3の上面に載置させる板状部材4の厚さ寸法を異ならせることにより、深さ寸法を調整可能とすることができる。また、その底板3の上面に複数枚の板状部材4を積層載置し、上流側搬送部11および下流側搬送部15における最上面をそれぞれの搬送面とするように構成し、板状部材4の積層数を増減することにより、前記深さ寸法を調整してもよい。
【0091】
このように反転部13の底面から上流側搬送面12および下流側搬送面16までの深さ寸法を調整することができれば、該キャップ姿勢制御装置1に供されるキャップCの凹部の深さ寸法等に合わせて、該キャップ姿勢制御装置1の駆動前に予め調整することで、伏せ置き姿勢で反転部13へ搬送されたキャップCをより確実に前傾させ、それに連続して前転させることが可能となり、該キャップ姿勢制御装置1による姿勢制御の対象となるキャップCの種類を増やすことができる。
【0092】
[キャップの搬送・反転の手段および方法について/その1]
前述の実施形態においては、キャップCを反転させるべく、該キャップCに作用する反転力として、前記搬送路10を下流側が下位に位置するように敷設された搬送路10を滑り落ちる力、すなわち、該キャップCに働く搬送の慣性力を利用している。その該キャップCに働く搬送の慣性力は、前述のように、キャップCの形状等に応じてキャップ姿勢制御装置1を含む搬送路10の傾斜角度を調整することで変化させることができるが、他には、例えば、キャップCを搬送路10に押し出すキャップ繰り出し装置のキャップCの押出力を調整することにより、キャップCに働く搬送の慣性力を調整するように構成してもよい。
【0093】
つまり、キャップ繰り出し装置のキャップCの押出力を調整することなどにより、キャップCの下流側への搬送と、反転部13における伏せ置き姿勢のキャップCの搬送方向への反転に十分な程度に、搬送路10を移動するキャップCに対し慣性力を働かせることができればよい。
【0094】
さらに言えば、本発明のキャップ姿勢制御装置1におけるキャップCの搬送路10は、必ずしも、上流側搬送部11が下流側搬送部15よりも上位に位置するように傾斜させて配設されている必要はなく、例えば、該搬送路10の搬送面が水平であるような場合には、図10に示すように、搬送路10における反転部13の上流側に、キャップCを1つずつ所定の力で反転部13へ向けてある程度のスピードを付与して押し出す押出装置80を設け、その押出装置80によって付与されるキャップCに働く搬送の慣性力を利用して、キャップCを反転させることもできる。なお、この図10においては、前記押出装置80を、同期して反対方向に回転駆動する一対のコントロールホイル81,81により構成し、この両コントロールホイル81,81間において、両コントロールホイル81,81のポケットに収納したキャップCを開放する際に反転部13へ向けてある程度のスピードを付与して押し出すようにした場合を示している。
【0095】
[キャップの搬送・反転の手段および方法について/その2]
図11に示すキャップ姿勢制御装置1は、上流側搬送部11として、搬送路10の幅方向を3分割した中央の帯状領域に、一対のプーリ90に巻回された無端状ベルト91を備えた上流側中央コンベアベルト92が配設され、該無端状ベルト91の上部軌道面を上流側搬送面12として作用させるべく、その回転方向が制御されている。この上流側コンベアベルト92における、キャップCの搬送方向下流端は、図6に示すキャップ姿勢制御装置1と同様、前記延出先端部20を構成する。
【0096】
さらに、前記溝部14を構成する有底の空間を挟んで、下流側搬送部15として、搬送路10の幅方向を3分割した中央の帯状領域に、一対のプーリ93に巻回された無端状ベルト94を備えた下流側中央コンベアベルト95が配設され、無端状ベルト94の上部軌道面を前記下流側搬送面16として作用させるべく、その回転方向が制御されているとともに、その両側方の帯状領域にはそれぞれ、一対のプーリ96,96に巻回された無端状ベルト97,97を備えた側部コンベアベルト98,98が、その上流側端部が前記下流側中央コンベアベルト95の上流側端部よりも上流側に位置するように配設され、前記無端状ベルト97,97の上部軌道面を前記下流側搬送面16として作用させるべく、その回転方向が制御されている。
【0097】
また、図11に示すキャップ姿勢制御装置1は、前記溝部14内における前記側部コンベアベルト98,98の直前部に、一対の反転当接部材99が搬送路の幅方向に離間させて配設されている。各反転当接部材99は、直角三角柱状の部材であり、直角を挟む2つの側面をそれぞれ側壁2と側部コンベアベルト98,98の上流側端部に平行に位置させ、直角に対向する一面を搬送方向上流側における幅方向中央方向へ指向させて配設されており、前記直角に対向する一面を前記反転当接部30として作用させ、該反転部13において伏せ置き姿勢から仰向け姿勢に反転する際にキャップCの外面が当接し、その当接点が回転支点となるように構成されている。また、各反転当接部材99の上面は、上流側搬送部11の上流側中央コンベアベルト92における上部軌道面や、下流側搬送部15の下流側中央コンベアベルト95並びに側部コンベアベルト98,98における上部軌道面と同じ高さに位置するように配設されており、該反転部13を仰向け姿勢のキャップCが通過する際に、該キャップCが溝部14内へ向かって傾斜する前にキャップCの天面の一部が至るように構成されている。
【0098】
このように構成されたキャップ姿勢制御装置1においては、上流側搬送部11を構成するコンベアベルト92の上面に載置したキャップCを所定速度で搬送方向下流側へ送り、下流端にて搬送が解除されたキャップCに伝達される慣性を利用して、キャップCを前転させる。
【0099】
つまり、図11に示すキャップ姿勢制御装置1は、上流側搬送面12および下流側搬送面16を移動する際は、前記キャップCはコンベアベルトの移動によって移動するので、この移動時にキャップCに作用する慣性力は極めて小さいが、上流側中央コンベアベルト92の駆動を下流端にて搬送が解除されたキャップCに押し出しの慣性力が作用するように調整することで、反転部13に至ったキャップCには一定の慣性力を付与することができる。
【0100】
例えば、下流側中央コンベアベルト95および一対の側部コンベアベルト98,98は全て同調させて(同スピードで)回転駆動させ、上流側中央コンベアベルト92は下流側中央コンベアベルト95および一対の側部コンベアベルト98,98よりも若干回転速度を上げるようにすると、反転部13に搬送方向先端から自重で落下していく伏せ置き姿勢のキャップCに搬送力に基づく慣性力をより作用させることができ、該キャップCの前転をさらに促すことができる。
【0101】
よって、仰向け姿勢のキャップCの場合は、上流側搬送部11の搬送面を上流側中央コンベアベルト92の駆動により移動して反転部13に至り、該コンベアベルト92の搬送が解除される際に付与される押し出しの慣性力を利用しつつ、溝部14内へ向かって傾斜する前に下流側搬送部15を構成する各反転当接部材99の上面に亘り、さらに、一対の側部コンベアベルト98,98または下流側中央コンベアベルト95の下流側搬送面16上に移動し、そのまま下流側搬送部15を搬送される。
【0102】
また、伏せ置き姿勢のキャップCの場合は、上流側搬送部11の搬送面を上流側中央コンベアベルト92の駆動により移動して反転部13に至る。その際、伏せ置き姿勢のキャップCは搬送方向先端の周壁解放端が延出先端部20を外れ、自重で溝部14内へ落下していくことで、該キャップCは、溝部14内へ向かって前傾するとともに、上流側中央コンベアベルト92の搬送が解除される際に付与される押し出しの慣性力、さらには、キャップCの搬送方向後端が当接している上流側中央コンベアベルト92の駆動による押し出しによって、該キャップCの外面が反転当接部材99の反転当接部30に当接し、その当接点を回転支点として前転し、仰向け姿勢となって、一対の側部コンベアベルト98,98または下流側中央コンベアベルト95の下流側搬送面16上に着座する。
【0103】
このように、コンベアベルトを配設してキャップCを移送する場合には、そのコンベアベルトの駆動スピードを調整して、キャップCに作用する慣性力を調整することでも、天面を下方に位置させた仰向け姿勢とされたキャップCと、天面を上方に位置させた伏せ置き姿勢とされたキャップCとが混在して搬送される搬送路10において、キャップCを全て一律に仰向け姿勢とすることができる。
【0104】
この構成のキャップ姿勢制御装置1は、特に、キャップCの搬送路10が平坦であるとか、キャップCの搬送方向下流側が上流側より上位に位置するような場合において、特に有効である。そして、従来のシュートのように、キャップCの搬送方向を必ずしも下方へ向ける必要もないので、キャップCの巻締め装置周辺のレイアウト設計の自由度が増すといった効果も得られるものとなる。
【0105】
[キャップの搬送・反転の手段および方法について/その3]
またさらに、キャップCの搬送の慣性力の有無や強弱にかかわらず、搬送路10に(おける前記反転部13の上流側に)反転補助手段100を設け、該反転補助手段100により前記溝部14に搬送方向先端を自重で落下させて前傾した伏せ置き姿勢のキャップCに対し、反転のための外力を加えるようにしてもよい。
【0106】
つまり、反転補助手段100を備えたキャップ姿勢制御装置1を用いて、キャップCの姿勢を一律に仰向け姿勢に制御して下流側へ搬送する場合、すなわち、本発明のキャップCの姿勢制御方法の別の実施形態においては、搬送路10の途中に溝部14を備えた反転部13を形成し、溝部14は、仰向け姿勢で搬送されているキャップCはその上部を通過し、伏せ置き姿勢で搬送されているキャップCは自重でその搬送方向先端を落下させて前傾するように形成する。伏せ置き姿勢で搬送されて反転部13において前傾したキャップCは、搬送路10における反転部13の上流側に設けられた反転補助手段100によって付与される反転のための外力により、その前傾動作に連続させて、該反転部13において搬送方向へ前転し、仰向け姿勢に矯正される。
【0107】
[キャップの搬送・反転の手段および方法について/その3−1]
例えば、反転補助手段100は、溝部14に搬送方向先端を落下させて前傾する伏せ置き姿勢のキャップCにエアを吹き付けて重心の移動を促し、キャップCの前転を補助するように構成されたエア供給手段101であってもよい。
【0108】
具体的には、図12のように、エア供給手段101のエアの吹き出し口102を延出先端部20に設け、キャップCの凹部内(における重心よりも上方の部分)にエアを吹き入れて重心の移動を促し、キャップCの前転を補助することが考えられる。
【0109】
天面が上流側搬送面12に当接した状態となっている仰向け姿勢のキャップCがエアの吹き出し口102を通過する場合には、前記天面によってエアが周囲に分散されることにより、該キャップCの姿勢が傾くことはなく、キャップCの周壁開放端が上流側搬送面12に当接した状態となっている伏せ置き姿勢のキャップCがエアの吹き出し口102を通過する場合には、エアジェットが働き、前記溝部14に搬送方向先端を落下させて前傾する伏せ置き姿勢のキャップCの凹部内にエアを吹き込むことで重心の移動を促し、該キャップCの前転を補助することができる。
【0110】
このように、エアをキャップCの搬送中は常に吹き出しているようにしても、該エアが仰向け姿勢のキャップCの回転に作用することはないので、反転部13に至るキャップCの姿勢を判別するキャップ姿勢制御装置1を別途設ける必要はなく、経済的である。
【0111】
なお、キャップCの姿勢を制御するためには、反転部13にはキャップCが1つづつ間隔をあけて供給されることが望ましい。そこで、上流側搬送部11に搬送するキャップCを1つずつ間欠的に供給するべく、公知のコントロールホイルのような切り離し手段(図10の押出装置80のコントロールホイル81(片側)参照)を別途設けることも有効であり、その場合には、その切り離し手段の駆動タイミングとリンクさせて、キャップCがエア吹き出し口102に至ったタイミングを図って、瞬間的にエアを吹き出すように形成することも可能である。
【0112】
勿論、前記エア供給装置100と合わせて反転部13に至るキャップCを検出するキャップ検出手段を別途設けた場合には、エアの吹き出しのタイミングを、キャップCがエア吹き出し口102に至るときに的確に合わせることも可能となり、エアジェットを用いて前転を補助することにより、確実に伏せ置き姿勢で搬送されているキャップCの姿勢を、仰向け姿勢に反転させることができる。
【0113】
また、反転部13に至るキャップCの姿勢を判別するキャップ姿勢判断手段を別途設けた場合には、伏せ置き姿勢で搬送されているキャップCがエアの吹き出し口に至るときにのみ、エアを吹き出させることができる。
【0114】
[キャップの搬送・反転の手段および方法について/その3−2]
また、このように反転部13に至るキャップCの姿勢を判別するキャップ姿勢判断手段を設けた場合、反転補助手段100は、上流側搬送部11の下流端近傍に配設され、キャップCの通過に合わせて、溝部14に搬送方向先端を落下させて前傾する伏せ置き姿勢のキャップCの搬送方向後端を押し上げてキャップCの前転を補助するように構成された押し上げ手段103であってもよい。
【0115】
具体的には、図13のように、上流側搬送面12からの突き出しと引き込みを可能に往復動するように構成されたピン部材104を有する押し上げ手段103の、前記ピン部材の出入り口105を延出先端部20に設け、溝部14に搬送方向先端を落下させて前傾する伏せ置き姿勢のキャップCの搬送方向後端をピン部材104で押し上げ、さらに前傾させることにより重心の移動を促してキャップCの反転を補助するようにするとよい。押し上げ動作が完了した後は、ピン部材104を出入り口105に引き込むようにすることは言うまでもない。
【0116】
また、反転空隙部21が比較的大きく形成されているような場合には、一端を揺動支点として回動自在に上流側搬送部11の下流端近傍の反転空隙部21に配設された片部材を備える押し上げ手段の前記片部材を、前記溝部14に搬送方向先端を落下させて前傾する伏せ置き姿勢のキャップCの該反転空隙部21に収められている周壁解放端に下方から当接させ、搬送方向後端を押し上げてキャップCの前転を補助することが考えられる。
【0117】
このように押し上げ部材を配設した場合においても、伏せ置き姿勢で搬送されているキャップCに前転のための外力として、ピン部材104や片部材を作用させて、より確実に、その姿勢を仰向け姿勢に反転させることができる。
【0118】
[キャップの搬送・反転の手段および方法について/その3−3]
さらに、反転補助手段100は、キャップCの搬送方向へ回転する回転体106が前記反転部13の上方に配設され、仰向け姿勢で反転部13に搬送されるキャップCに対しては接触することなく、前記溝部14に搬送方向先端を落下させて前傾するキャップCに対しては、前傾姿勢のキャップCの最上部位となる搬送方向後端に摺接してキャップCを搬送方向へ押し出し、キャップCの前転を補助するように構成された補助ローラ手段107であってもよい。
【0119】
具体的には、補助ローラ手段107は、図14に示すように、回転体106としての複数個のプーリ109に巻回された無端状ベルト108を上流側搬送面12を移動するキャップCの上端部分の軌道の直上位置に臨ませ、キャップCの搬送方向へ無端状ベルト108を回転させて前記溝部14に搬送方向先端を落下させて前傾する伏せ置き姿勢のキャップCの最上部に摺接させ、該キャップCを搬送方向へ押し出すように構成されている。また、図14において、キャップCに対する当接位置に配設されたプーリ109は、回転軸にばね等でクッション性を付与し、キャップCに摺接した際に自身が多少上下に揺動可能とするとともに、図示しない展張ローラで該無端状ベルト108にテンションを付与するように構成するとよい。
【0120】
さらに、補助ローラ手段107は、図15に示すように、回転体106としての回転軸で回転するローラ110を上流側搬送面12を移動するキャップCの上端部分の軌道の直上位置に臨ませ、キャップCの搬送方向へ回転するローラ表面を溝部14に搬送方向先端を落下させて前傾する伏せ置き姿勢のキャップCの最上部に摺接させ、該キャップCを搬送方向へ押し出して前転を促すように構成されている。該ローラ110の表面は、図15に示すように、細かな突起111が林立して形成されていてもよい。
【0121】
この補助ローラ手段107を配設する場合、キャップCは、どのような手段によって搬送されてもよく、反転部13に至ったキャップC自身に搬送の慣性力が働いていなくてもよい。例えば、図11に示すような、上流側搬送部11および下流側搬送部15がコンベアベルトにより構成されているような場合において、反転部13に搬送方向先端を落下させて前傾する伏せ置き姿勢のキャップCに、確実にキャップCの搬送方向へ回転する無端状ベルト108やローラ110等の回転体106が摺接し、搬送方向へ前転する反転力を付与することができる。
【0122】
なお、本発明のキャップ姿勢制御方法およびキャップ姿勢制御機構、並びにキャップ姿勢制御装置は、その要旨を逸脱しない範囲で種々変形実施できることは勿論である。
【0123】
また、本発明における姿勢制御の対象のキャップCは、必ずしも寸胴の円筒体である必要はなく、周壁が基本的に円筒体であればよい。例えば、周壁解放端外周にフランジが形成されているようなキャップCであっても、本発明による姿勢制御の対象となりうる。
【符号の説明】
【0124】
C キャップ
1 キャップ姿勢制御装置
2 側壁(側方ガイド部材)
3 底板
4 板状部材
10 搬送経路
11 上流側搬送部
12 上流側搬送面
13 反転部
14 溝部
15 下流側搬送部
16 下流側搬送面
20 延出先端部
21 反転空隙部
30 反転当接部
40 ガイド壁
41 スライド板
42 スライドガイド溝
43 止めねじ
50 搬送部空隙部
60 切欠き部
61 反転キャップ収納部
62 天板部
70 磁石
71 金属板
72 スライドガイド溝
73 スライド係合突起
74 調整溝
80 押出装置
81 コントロールホイル
90 プーリ
91 無端状ベルト
92 上流側中央コンベアベルト
93 プーリ
94 無端状ベルト
95 下流側中央コンベアベルト
96 プーリ
97 無端状ベルト
98 側部コンベアベルト
99 反転当接部材
100 反転補助手段
101 エア供給手段
102 エア吹き出し口
103 押し上げ手段
104 ピン部材
105 出入り口
106 回転体
107 補助ローラ手段
108 無端状ベルト
109 プーリ
110 ローラ
111 突起
【技術分野】
【0001】
本発明は、容器の口元部に対して巻締めなどによって装着されるキャップの姿勢を天面を下方に位置させた仰向け姿勢に矯正するキャップの姿勢制御方法およびキャップ姿勢制御機構と、キャップ姿勢制御機構を備えてキャップの姿勢制御方法を実行し、キャップの姿勢を一律に揃えて次工程へ搬送するためのキャップ姿勢制御装置に関する。
【背景技術】
【0002】
ボトルなどの口元部にキャップを巻締める作業を行うキャップ巻締め装置などには、キャップの表裏をいずれかに揃えて供給する必要があるため、従来より、キャップの表裏をいずれかに揃えるための方法や、姿勢を一律に揃えたキャップを次工程へ供給するための装置が開発されている。
【0003】
例えば、キャップの姿勢制御方法やキャップ姿勢制御装置として、本流となるシュートの途中から分岐させて設けられ、搬送路を軸回り方向に捻転させたツイストシュートを用いるものがある。
【0004】
このツイストシュートを用いるキャップの姿勢制御方法やキャップの姿勢制御装置は、キャップの表裏選別機構を備え、このキャップの表裏選別機構により排除されなかった表裏一方のキャップはそのまま本流を搬送し、キャップの表裏選別機構により排除された表裏他方のキャップは、本流から分岐させたツイストシュートを通過させる際に反転させて、キャップの表裏選別機構により排除されなかった表裏一方のキャップと姿勢(表裏)を揃えた状態で該ツイストシュートを搬送し、次の工程へ供給する(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】実願昭56−065978号公報のマイクロフィルム
【発明の概要】
【発明が解決しようとする課題】
【0006】
このように、前述のツイストシュートを備えるキャップの姿勢制御装置においては、ツイストシュートの通過(自然落下)中にキャップの姿勢を反転させる必要がある。しかしながら、使用するキャップの大きさ、重さ、天面側と開放底面側との重量バランスなどはキャップの品種に応じてまちまちであるため、キャップの品種の型替えがあるときは、前記ツイストシュートの幅および高さ(管状の場合は内径寸法)、長さ、捻転状態等を各キャップに合わせて設計し直し、配設し直さなければならず、型替え作業が大掛かりなものとなっていた。
【0007】
さらに、キャップの搬送路にツイストシュートを配設するための落差、すなわち、自然落下するキャップが反転するために必要な落差を確保しなければならず、さらには、キャップの表裏選別機構により排除されなかったキャップが搬送される本流のシュートと、キャップの表裏選別機構により排除されたキャップが搬送される分流のツイストシュートとを併設するなど、キャップ姿勢制御装置自体が大型化してしまうといった問題もあった。
【0008】
そして、前述のように、本流のシュートとツイストシュートとを併設するような構成は部品点数も多くなり、装置構成が複雑になって、コスト高にもなるといった、別の解決すべき課題も生じる。
【0009】
本発明は前記した問題点を解決するためになされたもので、天面を下方に位置させた仰向け姿勢とされたキャップと、天面を上方に位置させた伏せ置き姿勢とされたキャップとが混在して搬送される搬送路において、簡単な構成で確実にキャップを全て一律に仰向け姿勢とすることができるキャップの姿勢制御方法およびキャップ姿勢制御機構を提供するとともに、前記キャップの姿勢制御方法を実行でき、種々のキャップに対する汎用性があり、構成も簡素化できてコストダウンでき、型替えの作業も簡便かつ低コストであって、メンテナンス性も向上するキャップ姿勢制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
前記課題を解決する本発明のキャップの姿勢制御方法は、一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされたキャップの搬送路に形成された溝部を備える反転部において、該反転部へ仰向け姿勢で搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部上を通過させて下流側へ送り、伏せ置き姿勢で搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させて前傾させたあと、前記搬送力に基づく慣性力および/または反転のために該キャップに加える外力により、その前傾動作に連続させて、搬送方向下流側へ前転させ、仰向け姿勢に制御して下流側へ送ることを特徴とする。
【0011】
このような特徴を備えたキャップの姿勢制御方法によれば、天面を下方に位置させた仰向け姿勢とされたキャップと、天面を上方に位置させた伏せ置き姿勢とされたキャップとが混在して搬送される搬送路において、特段のキャップ姿勢の判別手段を設けなくても、簡単な構成で確実にキャップの姿勢を判別し、伏せ置き姿勢のキャップは反転させることにより、搬送されるキャップを全て一律に仰向け姿勢とすることができる。また、1本の搬送路内においてキャップの姿勢制御を行なうので、構成も簡素化できてコストダウンできる。
【0012】
また、本発明のキャップ姿勢制御機構は、一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされたキャップの搬送路に、該搬送路を上流側搬送部と下流側搬送部とに分断する溝部を有し、該溝部は仰向け姿勢で上流側搬送部を搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部上を通過させて下流側搬送部へ送り、伏せ置き姿勢で上流側搬送部を搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させて前傾させたあと、前記搬送力に基づく慣性力および/または反転のために該キャップに加える外力により、その前傾動作に連続させて、搬送方向下流側へ前転させ、仰向け姿勢に制御して下流側搬送部へ送るように構成された反転部が形成されていることを特徴とする。
【0013】
このような特徴を備えたキャップ姿勢制御機構によれば、天面を下方に位置させた仰向け姿勢とされたキャップと、天面を上方に位置させた伏せ置き姿勢とされたキャップとが混在して搬送される搬送路において、特段のキャップ姿勢の判別手段を設けなくても、簡単な構成で確実にキャップの姿勢を判別し、伏せ置き姿勢のキャップは反転させて、搬送されるキャップを全て一律に仰向け姿勢とすることができる。また、1本の搬送路内においてキャップの姿勢制御を行なうので、構成も簡素化できてコストダウンできる。
【0014】
また、本発明のキャップ姿勢制御装置は、一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされたキャップが仰向け姿勢で搬送されることを要する装置へ向かう搬送路の少なくとも一部を構成するように配設され、一対の側方ガイド部材間において、該搬送路を、上流側搬送面を有する上流側搬送部と、凹状に形成された溝部を備える反転部と、下流側搬送面を有する下流側搬送部とから構成し、前記上流側搬送部の上流側搬送面の下流端には、搬送路の幅方向中央を搬送方向へ延出させて、前記反転部の溝部に搬送方向先端を落下させた伏せ置き姿勢のキャップの凹部内に収まるように形成された延出先端部と、前記延出先端部の前記一対の側壁間における幅方向両側方には、搬送方向先端を前記溝部に落下させた伏せ置き姿勢のキャップの周壁開放端を位置させる反転空隙部が形成されており、前記下流側搬送部における上流端には、搬送方向先端を前記反転部の溝部に落下させた伏せ置き姿勢のキャップを当接係合させる反転当接部が形成され、前記溝部は、仰向け姿勢で上流側搬送部を搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部上を通過させて前記下流側搬送部へ送り、伏せ置き姿勢で上流側搬送部を搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させ、前記延出先端部を凹部に納めるようにして前傾させたあと、その前傾動作に連続させて、前記搬送力に基づく慣性力により前記反転当接部に当接させ、その当接点を回転支点として搬送方向へ前転させ、仰向け姿勢に制御して下流側搬送部へ送るように構成されていることを特徴とする。
【0015】
また、本発明の別のキャップ姿勢制御装置は、一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされたキャップが仰向け姿勢で搬送されることを要する装置へ向かう搬送路の少なくとも一部を構成するように配設され、一対の側方ガイド部材間において、該搬送路を、上流側搬送面を有する上流側搬送部と、凹状に形成された溝部を備える反転部と、下流側搬送面を有する下流側搬送部とから構成し、前記上流側搬送部の上流側搬送面の下流端には、搬送路の幅方向中央を搬送方向へ延出させて、前記反転部の溝部に搬送方向先端を落下させた伏せ置き姿勢のキャップの凹部内に収まるように形成された延出先端部と、前記延出先端部の前記一対の側壁間における幅方向両側方には、搬送方向先端を前記溝部に落下させた伏せ置き姿勢のキャップの周壁開放端を位置させる反転空隙部が形成されており、前記下流側搬送部における上流端には、搬送方向先端を前記反転部の溝部に落下させた伏せ置き姿勢のキャップを当接係合させる反転当接部が形成され、前記反転部には、搬送方向下流側を前記反転部の溝部に落下させた伏せ置き姿勢のキャップに、反転のための外力を付与する反転補助手段が配設されており、前記溝部は、仰向け姿勢で上流側搬送部を搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部上を通過させて前記下流側搬送部へ送り、伏せ置き姿勢で上流側搬送部を搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させ、前記延出先端部を凹部に納めるようにして前傾したあと、その前傾動作に連続させて、前記搬送力に基づく慣性力と前記反転補助手段によって該キャップに加えられる外力とにより、前記反転当接部に当接させ、その当接点を回転支点として搬送方向へ前転させ、仰向け姿勢に制御して下流側搬送部へ送るように構成されていることを特徴とする。
【0016】
そして、本発明のさらに別のキャップ姿勢制御装置は、一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされたキャップが仰向け姿勢で搬送されることを要する装置へ向かう搬送路の少なくとも一部を構成するように配設され、一対の側方ガイド部材間において、該搬送路を、上流側搬送面を有する上流側搬送部と、凹状に形成された溝部を備える反転部と、下流側搬送面を有する下流側搬送部とから構成し、前記上流側搬送部の上流側搬送面の下流端には、搬送路の幅方向中央を搬送方向へ延出させて、前記反転部の溝部に搬送方向先端を落下させた伏せ置き姿勢のキャップの凹部内に収まるように形成された延出先端部と、前記延出先端部の前記一対の側壁間における幅方向両側方には、搬送方向先端を前記溝部に落下させた伏せ置き姿勢のキャップの周壁開放端を位置させる反転空隙部が形成されており、前記下流側搬送部における上流端には、搬送方向先端を前記反転部の溝部に落下させた伏せ置き姿勢のキャップを当接係合させる反転当接部が形成され、前記反転部には、搬送方向下流側を前記反転部の溝部に落下させた伏せ置き姿勢のキャップに、反転のための外力を付与する反転補助手段が配設されており、前記溝部は、仰向け姿勢で上流側搬送部を搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部上を通過させて前記下流側搬送部へ送り、伏せ置き姿勢で上流側搬送部を搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させ、前記延出先端部を凹部に納めるようにして前傾したあと、その前傾動作に連続させて、前記反転補助手段によって該キャップに加えられる外力により、前記反転当接部に当接させ、その当接点を回転支点として搬送方向へ前転させ、仰向け姿勢に制御して下流側搬送部へ送るように構成されていることを特徴とする。
【0017】
このような特徴を備えた前述の各キャップ姿勢制御装置によれば、前記延出先端部がキャップの凹部内に納まるとともに、キャップの周壁開放端が反転空隙部に位置するようにすることで、搬送方向先端を溝部に落下させたキャップが反転する際の回動支点をより搬送方向上流側へ位置させることが可能となる。また、延出先端部が凹部内に納まることで、深く前傾させることができ、この前傾に続く前転を確実に引き起こすことが可能となる。また、前記延出先端部がキャップの凹部内に納まるとともに、キャップの周壁開放端が反転空隙部に位置するようにすれば、溝部の搬送方向寸法を短寸法とすることができ、上流側搬送部を仰向け姿勢で搬送されたキャップを、該キャップに作用する搬送力で、確実かつ安定的に前記溝部を通過させることが可能となる。
【0018】
よって、天面を下方に位置させた仰向け姿勢とされたキャップと、天面を上方に位置させた伏せ置き姿勢とされたキャップとが混在して搬送される搬送路において、特段のキャップ姿勢の判別手段を設けなくても、簡単な構成で確実にキャップの姿勢を判別し、伏せ置き姿勢のキャップを搬送力に基づく慣性力や、反転のために加えられる外力、又はそれらの両方の力を利用して、キャップを全て一律に仰向け姿勢とすることができる。
【0019】
勿論、前記反転補助手段を備えたキャップ姿勢制御装置は、搬送方向先端を前記反転部の溝部に落下させた伏せ置き姿勢のキャップの搬送方向への前転を補助して確実に仰向け姿勢に反転させることができる。
【0020】
また、1本の搬送路内においてキャップの姿勢制御を行なうので、構成も簡素化できてコストダウンできる。
【0021】
さらに、前記上流側搬送部および/または下流側搬送部は、前記一対の側壁間における幅方向の中央部に搬送面が形成され、該搬送面と前記一対の側壁との間には、該搬送面から凹状に形成された搬送路空隙部が形成されていることを特徴とする。
【0022】
このような特徴を備えたキャップ姿勢制御装置によれば、上流側搬送部および/または下流側搬送部の搬送面と、その搬送面を搬送されるキャップとの間の接触面積を小さくすることが可能となる。接触面積が小さくなれば、その間に生じる摩擦を小さくすることが可能となり、キャップを該搬送面上をより円滑にスライド搬送させることが可能となる。
【0023】
また、搬送路の幅方向は種々のキャップに合わせて厳密に設計されている必要がなく、要は、キャップが搬送路空隙部に嵌ることなく、前記上流側搬送面を移動すればよい。よって、一たびの設定状態で、複数種のキャップの姿勢制御を実行することが可能であり、汎用性に優れたものとなる。
【0024】
またさらに、前記一対の側壁はそれぞれ対向方向において接離可能に形成されていることを特徴とする。
【0025】
このような特徴を備えたキャップ姿勢制御装置によれば、前記一対の側壁を対向方向において接離させることで、幅方向寸法を調整することができる。これにより、種々のキャップに対する汎用性をより向上させることができ、型替えの作業も簡便かつ低コストであって、メンテナンス性も向上させることができる。
【0026】
そして、前記上流側搬送部および/または下流側搬送部はキャップの搬送方向において相互に接離可能に形成されていることを特徴とする。
【0027】
このような特徴を備えたキャップ姿勢制御装置によれば、前記上流側搬送部および/または下流側搬送部をキャップを搬送方向において接離させることで、前記溝部の搬送方向寸法を調整することができる。これにより、種々のキャップに対する汎用性をより向上させることができ、型替えの作業も簡便かつ低コストであって、メンテナンス性も向上させることができる。
【発明の効果】
【0028】
このように、本発明のキャップの姿勢制御方法およびキャップ姿勢制御機構によれば、天面を下方に位置させた仰向け姿勢とされたキャップと、天面を上方に位置させた伏せ置き姿勢とされたキャップとが混在して搬送される搬送路において、特段のキャップ姿勢の判別手段を設けずとも、簡単な構成で確実にキャップの姿勢を判別し、伏せ置き姿勢のキャップは反転させて、搬送されるキャップを全て一律に仰向け姿勢とすることができる。
【0029】
さらに、キャップ姿勢制御装置によれば、キャップの姿勢制御方法を実行でき、種々のキャップに対し汎用させることができ、構成も簡素であるのでコストダウンでき、型替えの作業も簡便かつ低コストであって、メンテナンス性も向上させることができる。
【図面の簡単な説明】
【0030】
【図1】(a)本発明のキャップ姿勢制御装置の実施形態における要部平面図(伏せ置き姿勢のキャップの破線、仰向け姿勢のキャップの想像線有り(以下、同様に必要に応じ、伏せ置き姿勢のキャップの破線、仰向け姿勢のキャップの想像線有り)、(b)(a)の幅方向中央断面図
【図2】(a)本発明のキャップ姿勢制御機構およびキャップ姿勢制御方法における仰向け姿勢のキャップの搬送時(姿勢制御時)の姿勢の変化を重心位置に着目して表した説明図、(b)本発明のキャップ姿勢制御機構およびキャップ姿勢制御方法における伏せ置き姿勢のキャップの搬送時(姿勢制御時)の姿勢の変化を重心位置に着目して表した説明図
【図3】(a)図1のキャップ姿勢制御装置の底板に関する変形例を示す要部平面図、(b)(a)の幅方向中央断面図
【図4】(a)図1のキャップ姿勢制御装置の側壁に関する変形例を示す要部平面図、(b)(a)の要部断面図
【図5】(a)図1のキャップ姿勢制御装置の上流側搬送部の下流端の変形例を示す要部平面図、(b)(a)の幅方向中央断面図
【図6】(a)図1のキャップ姿勢制御装置の上流側搬送部に関する変形例を示す要部平面図、(b)(a)の幅方向中央断面図
【図7】(a)図1のキャップ姿勢制御装置の下流側搬送部の上流端の変形例を示す要部平面図(天井部省略)、(b)(a)の幅方向中央断面図、(c)キャップの形状を示す断面図
【図8】(a)図6のキャップ姿勢制御装置において上流側搬送部と下流側搬送部の間隙寸法を調整可能とした変形例(調整前)を示す要部平面図、(b)(a)の幅方向中央断面図、(c)(a)の要部断面図
【図9】(a)図6のキャップ姿勢制御装置において上流側搬送部と下流側搬送部の間隙寸法を調整可能とした変形例(調整後)を示す要部平面図、(b)(a)の幅方向中央断面図、(c)(a)の要部断面図
【図10】本発明のキャップ姿勢制御装置において、キャップに搬送力と反転のための搬送の慣性力を付与するための手段として押出装置を設ける場合を示す概略説明図
【図11】(a)本発明のキャップ姿勢制御装置において、キャップを搬送し、該キャップに搬送の慣性力を作用させるための手段としてコンベアベルトを設ける場合を示す要部平面図、(b)(a)の幅方向中央断面図
【図12】(a)図6のキャップ姿勢制御装置に、反転補助手段としてのエア供給手段を配設した場合を示す要部平面図、(b)(a)の幅方向中央断面図
【図13】(a)図6のキャップ姿勢制御装置に、反転補助手段としての押し上げ手段を配設した場合を示す要部平面図、(b)(a)の幅方向中央断面図
【図14】(a)図1のキャップ姿勢制御装置に、反転補助手段としての補助ローラ手段(ベルトタイプ)を配設した場合における仰向け姿勢のキャップの搬送時の状態を示す要部断面図、(b)図1のキャップ姿勢制御装置に、反転補助手段としての補助ローラ手段(ベルトタイプ)を配設した場合における伏せ置き姿勢のキャップの搬送時の状態を示す要部断面図
【図15】(a)図1のキャップ姿勢制御装置に、反転補助手段としての補助ローラ手段(ローラタイプ)を配設した場合における仰向け姿勢のキャップの搬送時の状態を示す要部断面図、(b)図1のキャップ姿勢制御装置に、反転補助手段としての補助ローラ手段(ローラタイプ)を配設した場合における伏せ置き姿勢のキャップの搬送時の状態を示す要部断面図
【発明を実施するための形態】
【0031】
以下には、本発明のキャップ姿勢制御機構を備え、本発明のキャップの姿勢制御方法を実行することができるキャップ姿勢制御装置について、図1乃至図15を用いて説明する。なお、以下では、特に言及しない限り、キャップの搬送路は公知のシュートと同様、傾斜角度を以て配設されているものとするが、各図においては傾斜角度を考慮せず、搬送面を水平にして視認した場合の視野図を示す。また、各図においては、説明の必要に合わせ、反転部に仰向け姿勢で至ったキャップは想像線(一点鎖線)で示し、反転部に伏せ置き姿勢で至ったキャップは破線で示している(その場合、符号省略)。
【0032】
前述のように、本発明のキャップ姿勢制御機構は、一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされ、重心を高さ方向において天面側に位置させたキャップの搬送路に、該搬送路を上流側搬送部と下流側搬送部とに分断する溝部を有する反転部を備えている。前記溝部は、仰向け姿勢で上流側搬送部を搬送されているキャップは該キャップを搬送する搬送力により、そのまま前記溝部上を通過させて前記下流側搬送部へ送り、伏せ置き姿勢で上流側搬送部を搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させ、前記延出先端部を凹部に納めるようにして前傾させたあと、その前傾動作に連続させて、前記搬送力に基づく慣性力により前記反転当接部に当接させ、その当接点を回転支点として搬送方向へ前転させ、仰向け姿勢に制御して下流側搬送部へ送るように構成されている。
【0033】
本実施形態のキャップ姿勢制御装置は、このキャップ姿勢制御機構を備えつつ、天面を下方に位置させた仰向け姿勢、あるいは、天面を上方に位置させた伏せ置き姿勢で搬送されてくるキャップの姿勢を、全て一律に前記仰向け姿勢として、下流側へ搬送するキャップ姿勢制御装置であり、キャップの搬送路の上流に設けられたキャップ繰り出し装置と、キャップを仰向け姿勢で搬送することを必要とする目的の装置との間をつなぐ搬送路において、直線状に敷設された該搬送路の少なくとも一部を構成するように配設されている。
【0034】
本実施形態のキャップ姿勢制御装置は、キャップの搬送を側方からガイドする側方ガイド部材としての一対の側壁間において、キャップの搬送方向の上流側から順に、上流側搬送面を有する上流側搬送部、凹状に溝形成された反転部、下流側搬送面を有する下流側搬送部を設けて構成されている。換言すれば、前記キャップ姿勢制御装置は、一対の側壁間において搬送路を上流側搬送部と下流側搬送部とに分断する凹状の溝部を有する反転部を備えている。
【0035】
キャップ姿勢制御装置は、前記上流側搬送部が下流側搬送部よりも上位に位置し、キャップ繰り出し部から1つずつ繰り出されるキャップが上流側搬送面および下流側搬送面をスライド移動可能に、全体として傾斜するようにして前記搬送路内に配置されており、このように傾斜角度を持たせて配設することで、キャップには搬送面を滑り落ちる搬送の慣性力が働くように構成されている。よって、その傾斜角度は、キャップの下流側への搬送と、反転部において伏せ置き姿勢のキャップを搬送方向へ反転させるために十分な程度に、該搬送路を移動するキャップに対して搬送の慣性力を作用させることができるように調整可能とされている。
【0036】
具体的には、図1に示すキャップ姿勢制御装置1は、一対の側壁2、2間の下部に板状の底板3が配設されており、その底板3の上面に、上流側搬送部11および下流側搬送部15を構成する板状部材4を、反転部13を構成する溝部14を挟んで離間させるようにして載置し、固定することで、上流側搬送面12、溝部14、下流側搬送面16を上流側から配列させた該キャップ姿勢制御装置1の搬送路10が形成されている。
【0037】
なお、上流側搬送部11、反転部13、下流側搬送部15は、キャップ姿勢制御装置1の板状部材4からなる搬送路10の搬送面を切削して反転部13の溝部14とすると共に、その反転部13よりも搬送方向上流側を上流側搬送部11とし、搬送方向下流側を下流側搬送部15として形成してもよい。
【0038】
また、図1のキャップ姿勢制御装置において、上流側搬送部11の上流側搬送面12の下流端は、該搬送路10の幅方向中央を搬送方向へ延出させた平面形状略三角形に形成され、延出先端部20とされている。この延出先端部20は、仰向け姿勢のキャップCと伏せ置き姿勢のキャップCに対し、上流側搬送部11の搬送面として作用するとともに、反転部13の溝部14に搬送方向先端を落下させた状態の伏せ置き姿勢のキャップCに対しては、該キャップCの凹部内に収まるように構成されている。また、上流側搬送部11の下流端における延出先端部20の両側方に形成された空隙は、反転部13の溝部14に搬送方向先端を落下させた状態の伏せ置き姿勢のキャップCの周壁を位置させる前記反転部13の反転空隙部21とされている。
【0039】
また、下流側搬送部15の下流側搬送面16の上流端には、反転部13において伏せ置き姿勢から前転して仰向け姿勢に反転する際にキャップCの外面が当接し、その当接点が回転支点となる反転当接部30が形成されている。本実施形態においては、搬送路10の下流側へ向かうに従い、搬送路10の幅方向両側から幅方向中央部へ漸次指向し、該搬送路10の幅方向中央部を最も下流側に位置させるように切り欠かれたV字状とされ、該反転部13において伏せ置き姿勢から仰向け姿勢に反転する際にそのV字状の切欠き部60にキャップCの外面が当接し、その当接点が回転支点となる反転当接部30が形成されている。本実施形態において、反転当接部30を構成する下流側搬送部15の下流側搬送面16は、反転部13から下流側へ搬送されるキャップC、特には、反転部13において、仰向け姿勢のキャップCが反転当接部30の鋭角な角に衝突することを防止すると共に、伏せ置き状態から仰向け状態に反転したキャップCの搬送方向への搬送を案内するように、面取り処理が施されている。
【0040】
なお、V字状に形成された反転当接部30は、径寸法や高さ寸法を異ならせた種々のキャップCに対して適用させることができる。つまり、サイズを少々異ならせたキャップCであっても、各キャップCはそれぞれの形状に合わせて前記V字状の切欠き部60のどこかの深さ(搬送方向)位置において、該反転当接部30に係合・当接するので、その当接点を回転支点として反転させることが可能となる。
【0041】
前述のように形成された上流側搬送部11と下流側搬送部15との間に形成された溝部14は、上流側搬送部11の上流側搬送面12をスライドして反転部13に至るキャップCに作用している搬送の慣性力との関係において、仰向け姿勢で移動しつつ該反転部13に至るキャップCについてはその移動を妨げることなくそのまま、その慣性力によって上部を通過させる一方で、伏せ置き姿勢で移動しつつ該反転部13に至るキャップCについては、延出先端部20を該キャップCの凹部内に収めつつ反転部13の溝部14内へ該キャップCの搬送方向先端を自重で落下させて搬送方向へ前傾させ、該キャップCに働く搬送の慣性力により、その前傾する動作に連続させて下流側搬送部15の上流端に当接させ、その当接点を回転支点として該キャップCを搬送方向へ反転させ、仰向け姿勢に矯正した状態でさらに下流側へ移動させるように構成されている。
【0042】
本実施形態においては、反転部13における上流側搬送部11と下流側搬送部15との間隙は、上流側搬送面12を仰向け姿勢で移動するキャップCが搬送路10の幅方向におけるどの位置に至った場合であっても、その重心が溝部14内へ傾く前にその搬送方向先端が下流側搬送面16へ至り、瞬間的には、前記仰向け姿勢のキャップCが上流側搬送面12と下流側搬送面16との間に架け亘されるべく、上流側搬送部11の搬送面の最下流端と下流側搬送部15の搬送面の最上流端との間の寸法が調整されているとともに、上流側搬送面12を伏せ置き姿勢で移動して該反転部13に至ったキャップCの搬送方向下流側に位置する周壁解放端が上流側搬送面12の最下流端から外れて前記溝部14内に自重により落下した時に、該キャップCが前傾し、その前傾動作と連続させて下流側搬送部15の上流端に当接し得る空間を確保して形成されている。
【0043】
さらに言えば、上流側搬送部11と下流側搬送部15は、仰向け姿勢のキャップCについては、作用している搬送の慣性力との関係において、該キャップCが溝内へ向かって傾斜する前にキャップCの重心が下流側搬送面16上に移動可能であること(第1の要件)と、伏せ置き姿勢のキャップCについては、搬送方向先端の周壁開放部を溝部14に落下させて前傾しつつ、さらに、該キャップCに働く搬送の慣性力により下流側へ搬送されたキャップCの外面が、下流側搬送部15の反転当接部30に当接することにより、その当接点を回転支点として前転し、仰向け姿勢となって下流側搬送面16に着座可能であること(第2の要件)の2つの条件を満たすように形成されている。前記第1の要件を満たすために、好ましくは、その重心が上流側搬送面12から外れるときは、必ず、キャップCの天面の一部が下流側搬送面16に至るような位置関係であることが望ましい。仰向け姿勢のキャップCの重心を1つの仮想ライン上で移動させることができるためである。
【0044】
次に、前述の図1のキャップ姿勢制御装置1を用いてキャップCの姿勢を一律に仰向け姿勢に制御して下流側へ搬送する方法、すなわち、本発明のキャップCの姿勢制御機構によりキャップCの姿勢を制御する方法(本発明のキャップの姿勢制御方法)について、図2を用いつつ説明する。
【0045】
本実施形態のキャップ姿勢制御装置1においては、上流に配置されたキャップ繰り出し装置から仰向け姿勢、あるいは、伏せ置き姿勢で間欠的に搬送路10に押し出されたキャップCは、図2に示すように、自身に作用する搬送の慣性力により搬送路10をスライドして下流側へ移動する。
【0046】
キャップCが仰向け姿勢である場合、キャップCは、図2(a)に示すように、天面を搬送路10の搬送面に当接させ、その重心を搬送路10の搬送面と平行で、かつ、搬送面に近い第1仮想ラインL1上に位置させた状態で移動する。
【0047】
そして搬送路10を仰向け姿勢で搬送されるキャップCが、該キャップ姿勢制御装置1が配設された搬送路10部分に至ると、上流側搬送部11の延出先端部20においてその搬送方向先端のみを反転部13の溝部14上に臨ませた状態となるが、その後、さらに自身に作用する搬送の慣性力により下流側に移動する際に、本実施形態のキャップ姿勢制御装置1においては、上流側搬送部11と下流側搬送部15の位置関係は、作用している搬送の慣性力との関係において該キャップCが溝部14内へ向かって傾斜する前に重心を下流側搬送面16上に移動するように形成されているので、該キャップCは、反転部13においてもその重心(図2には黒点で示す)を前下方へ傾けることなく、常に搬送路10の搬送面と平行な第1仮想ラインL1上に置いたそのままの状態で下流側へ搬送される。
【0048】
特に、本実施形態においては、仰向け姿勢のキャップCの重心が上流側搬送面12から外れるときは、キャップCの天面の一部が下流側搬送面16に至るように形成されているので、瞬間的に、上流側搬送面12と下流側搬送面16との間に架け亘された状態となったあと、仰向け姿勢のキャップCが自身に作用する搬送の慣性力によりさらに下流側へ移動することとなる。
【0049】
一方、キャップCが伏せ置き姿勢である場合、キャップCは、図2(b)に示すように、周壁解放端を搬送路10に当接させ、その重心を搬送路10の搬送面と平行で、かつ、第1仮想ラインL1よりも搬送面から離間した第2仮想ラインL2上に位置させた状態で移動する。このとき、該キャップCには、その重力に搬送路10を下流側へ移動する慣性力が作用することは前述の通りであるが、伏せ置き姿勢のキャップCは、仰向け姿勢のキャップCよりも重心が移動面から高い位置にあれば、慣性力の影響を受けて反転し易い状態にある。
【0050】
そして、搬送路10を伏せ置き姿勢で搬送されるキャップCが該キャップ姿勢制御装置1が配設された搬送路10部分に至ると、キャップCは、搬送方向先端に位置する周壁解放端が上流側搬送部11の下流端に形成された延出先端部20を通過したところで、該キャップCの搬送方向先端の周壁解放端が延出先端部20から外れて反転部13の溝部14へ自重により落下するため、キャップCは前傾する。このとき、延出先端部20は、伏せ置き姿勢のキャップCの凹部内に収まり、反転空隙部21には反転部13の溝部14に搬送方向先端を落下させた伏せ置き姿勢のキャップCの周壁解放端が位置する。
【0051】
そして、この前傾動作と同時に、該キャップCに対し、該キャップCがさらに下流側へ移動しようとする慣性力が作用する。このとき、本実施形態のキャップ姿勢制御装置1においては、上流側搬送部11と下流側搬送部15の位置関係は、搬送方向先端の周壁開放端を溝部14に落下させて前傾しつつ、さらに、該キャップCに働く搬送の慣性力により下流側へ搬送された該キャップCの外面が下流側搬送部15の反転当接部30に当接することにより、その当接点を回転支点として前転し、仰向け姿勢となって下流側搬送面16に着座可能とされている。よって、キャップCはその外面を、反転当接部30を含む反転部13の内面に当接させ、その当接点を反転の回転支点として前転し、天面を下流側搬送部15の搬送面に着座する。この仰向け姿勢とされたキャップCは、重心を下流側の搬送路10上における、搬送路10の搬送面と平行な第1仮想ラインL1上に移し、重心を搬送面により近いところに位置させ安定した状態で、さらに下流側へ搬送される。
【0052】
例えば、図2(b)に示すように、反転部13に落下させた伏せ置き姿勢のキャップCを該溝部14内で前傾させたときに、搬送方向先端の周壁開放端が上流側搬送部11に近い位置で反転部13の底板3の上面に当接した場合には、この当接点が第1の回転支点となり、第1の回転支点を回転支点として前転動作をとるキャップCの側壁の天面側が次に当接する前記V字状の反転当接部30の当接点が反転の第2の回転支点となって、該キャップCは搬送方向へ前転し、下流側搬送部15の下流側搬送面16に着座する際には、伏せ置き姿勢から反転して仰向け姿勢に矯正される。
【0053】
このように、本実施形態のキャップ姿勢制御装置およびキャップ姿勢制御方法によれば、天面を下方に位置させた仰向け姿勢、あるいは、天面を上方に位置させた伏せ置き姿勢で間欠的に供給される個々のキャップCの搬送姿勢を、機械的な構成の姿勢判別装置のようなものを配設するまでもなく、結果的に反転部13へ搬送されるキャップCが前傾姿勢をとるか否かにより自動識別し、そして、反転部13において前傾したキャップC、すなわち、伏せ置き姿勢のキャップCは、該キャップCの重心やこのキャップCに作用する搬送の慣性力を利用し、その前傾動作に連続させて搬送方向下流側へ回転させ、全て仰向け姿勢として下流へ供給することができる。
【0054】
また、本実施形態のキャップ姿勢制御装置1においては、1回の設定において様々なキャップCを対象としてその姿勢を制御することが可能であり、仮に、キャップCの品種の型替え等で、設定を変更する必要があったとしても、簡単な作業で設定を変更することができる。このように型替えの作業も簡便かつ低コストであって、メンテナンス性も向上させることができる。
【0055】
また、キャップ姿勢制御装置1自体が極めて簡単な構成であり、キャップCの姿勢制御を1本の搬送路10において行なうことができるので、従来のように本流の他に分流を設けるといった必要がなく、キャップ姿勢制御装置1自体を小型化することができる。
【0056】
以下には、本発明のキャップ姿勢制御装置に関し、前述の実施形態のキャップ姿勢制御装置1の構成の特筆すべき事項や変更可能点等を挙げて説明する。
【0057】
[底板について]
本発明のキャップ姿勢制御装置1において、搬送路10の底板3の配設は必須ではない。
【0058】
図3は、図1に対応させて、前述の実施形態のキャップ姿勢制御から搬送路10の底板3を省略した状態のキャップ姿勢制御装置1を示している。この場合、上流側搬送部11および下流側搬送部15を構成する板状部材4は、例えば、一対の側壁2,2間において、その搬送方向両側を側壁2,2に貼着させて構成することができる。
【0059】
このように、反転部13の溝部14が無底状に形成されていたとしても、搬送されるキャップCに搬送の慣性力が作用することで、伏せ置き姿勢で搬送されていたキャップCが前傾した後の回転中に、その外面を反転当接部30を含む反転部13の内面に点接させ、その当接点を回転支点として該キャップCを前転させることができる。
【0060】
例えば、図3(b)に示すように、搬送方向先端を反転部13に落下させた伏せ置き姿勢のキャップCを該溝部14内で前傾させ、反転動作をとるキャップCの周壁の天面側をV字状の反転当接部30に当接させれば、この当接点が回転支点となり、キャップCを前転させて、伏せ置き姿勢から仰向け姿勢に矯正することができる。
【0061】
[側壁について]
前述の実施形態のキャップ姿勢制御装置1においては、該キャップ姿勢制御装置1における一対の側壁2,2間の寸法、すなわち、搬送路10の幅方向寸法は、キャップCの安定的な搬送を配慮して、該キャップ姿勢制御装置1に供されるキャップCの直径寸法より大きく、搬送を妨げない寸法であることは勿論のこと、上流側搬送部11を搬送される伏せ置き姿勢のキャップCが上流側搬送部11の下流側における幅方向のいかなる位置に至った場合であっても、該キャップCの凹部内に延出先端部20が収まった状態でキャップCが前傾するように設定されている。具体的には、前記一対の側壁2,2間の寸法はキャップCの直径寸法の1.1倍〜1.4倍程度とするとよい。
【0062】
そして、キャップ姿勢制御装置1の一対の側壁2,2は、互いに接離可能に形成し、搬送路10の幅寸法を調整可能としてもよい。
【0063】
すなわち、本発明のキャップ姿勢制御装置1は、一対の側方ガイド部材2、2間に、キャップCの移動面が形成された上流側搬送部11および下流側搬送部15が反転部13を介して配置されている構造であればよく、例えば、図4に示すように、一対の側方搬送ガイド部材2,2のぞれぞれを、縦板状のガイド壁40の下辺部分にスライド板41を配設時における搬送路10側へ延出させて連接し、断面形状をL字状に形成するとともに、このスライド板41に幅方向に延在する長溝状のスライドガイド溝42を穿設し、ガイド壁40を上流側搬送面12および下流側搬送面16よりも上方へ延出させ、対向するガイド壁40,40間を所望の寸法として、該スライドガイド溝42で止めねじ43を用いて底板3の底面に一対の側方ガイド部材2,2を所望の幅で固定する構成とし、該キャップ姿勢制御装置1に供されるキャップCの種類に応じて、適宜、ガイド壁40,40間を所望の寸法を調整するようにしてもよい。
【0064】
このようにキャップ姿勢制御装置1の一対の側壁2,2を互いに接離可能に形成し、搬送路10の幅寸法を調整可能とすることで、該キャップ姿勢制御装置1を用いた姿勢制御の対象となるキャップCの種類を増やすことができる。
【0065】
[上流側搬送部の下流端について]
本発明のキャップ姿勢制御装置1において、延出先端部20および反転空隙部21が形成される上流側搬送部11の下流端についても、前述の実施形態における構成に限るものではない。要は、延出先端部20は、上流側搬送部11の搬送面として作用するとともに、反転部13の溝部14に搬送方向先端を落下させた状態の伏せ置き姿勢のキャップCに対しては該キャップCの凹部内に収まるように形成されていればよく、反転空隙部21は、反転部13の溝部14に搬送方向先端を落下させた状態の伏せ置き姿勢のキャップCの周壁を位置させることができるものであればよい。
【0066】
図5には、前述の実施形態のキャップ姿勢制御装置1との関係において、延出先端部20および反転空隙部21が形成される上流側搬送部11の下流端の形状を異ならせたキャップ姿勢制御装置1を示している。
【0067】
このキャップ姿勢制御装置1の上流側搬送面12の下流端は、幅方向中央を搬送方向へ凸状に延出させて形成されており、その凸状に延出する部分が延出先端部20として、伏せ置き姿勢、仰向け姿勢の両キャップCの上流側搬送面12として作用するとともに、反転部13の溝部14に搬送方向先端を落下させた状態の伏せ置き姿勢のキャップCの凹部内に収まるように形成されている。凸状の延出先端部20は、下流側のコーナー部を反転部13の溝部14の深さ方向に面取り処理されており、上流側搬送部11を搬送されるキャップCが搬送路10の幅方向のいかなる位置に搬送されても、キャップCの凹部内に該延出先端部が収まり易いように形成されている。また、この凸状の延出先端部20の両側方に形成された空隙は、反転空隙部21として作用する。
【0068】
このように形成された上流側搬送部11の下流端においても、凸状に延出する延出先端部20がキャップCの上流側搬送部11の搬送面として作用し、また、前傾する伏せ置き姿勢のキャップCに対しては、その延出先端部20が前傾するキャップCの凹部内に収まるとともに、反転空隙部21にキャップCの周壁が収まることで、反転部13において、伏せ置き姿勢のキャップCに搬送の慣性力を作用させて、前傾姿勢から連続させて反転させることができる。
【0069】
[上流側搬送部(搬送路空隙部)について]
図6には、前述の実施形態のキャップ姿勢制御装置1との関係において、上流側搬送部11(延出先端部20を含む)の構成を異ならせたキャップ姿勢制御装置1を示している。
【0070】
上流側搬送部11は、上流側搬送面12と一対の側壁2,2との間にそれぞれ凹状の空隙からなる搬送路空隙部50が形成されるように、上流側搬送面12が一対の側壁2,2間における幅方向の中央部に位置させて配設されている。
【0071】
このように形成されたキャップ姿勢制御装置1においても、前記一対の側壁2,2間の下部に配設された底板3の上面に、上流側搬送部11および下流側搬送部15を構成する板状部材4を、反転部13を構成する溝部14を挟んで離間させるようにして積層することで、上流側搬送部11および下流側搬送部15並びに反転部13が形成されている点においては、前述の実施形態と同じであるが、この図6に示すキャップ姿勢制御装置1は、上流側搬送部11は、底板3上における搬送路10の幅方向を略3分割する中央の帯状領域に上流側搬送部11を構成する板状部材4を積層することにより形成されている。よって、この上流側搬送部11の上流側搬送面12と一対の側壁2,2との間には、上流側搬送面12と略同幅に底板3を露出させた凹状の空隙からなる搬送路空隙部50,50が形成されている。
【0072】
そして、このキャップ姿勢制御装置1においては、上流側搬送面12の下流端はそのまま延出先端部20として作用し、延出先端部20の両側に位置する搬送路空隙部50の下流端は、反転空隙部21を兼ねることとなる。
【0073】
なお、搬送路空隙部50は、必ずしも底板3を溝内底部に露出させている必要もなく、例えば、上流側搬送部11の上流側搬送面12を切削して、上流側搬送面12と一対の側壁2,2との間に凹状の搬送路空隙部50,50を形成してもよい。
【0074】
要は、このように搬送路空隙部50,50を形成し、上流側搬送面12を搬送路10における幅方向中央部にのみ配設する構成とすることで、上流側搬送路10の上流側搬送面12を移動するキャップCとの摺接面積を小さくすることができるので、摺動摩擦を軽減させて、キャップCの下流側へのスライドを円滑なものとすることができる。
【0075】
また、上流側搬送部11を搬送路10の幅方向中央の帯状領域に形成することにより、キャップCの径方向寸法が多少異なっても、搬送方向先端を反転部13に落下させた伏せ置き姿勢のキャップCの凹部内に延出先端部20を兼ねる該上流側搬送部11の下流側先端を収めることが可能となり、該キャップ姿勢制御装置1をより多くの種類(サイズ)のキャップCに汎用させることが可能となる。
【0076】
[下流側搬送部の上流端について]
本発明のキャップ姿勢制御装置1において、反転当接部30が形成される下流側搬送部15の上流端についても、前述の実施形態における構成に限るものではない。要は、前記溝部14に搬送方向先端を落下させて前傾した伏せ置き姿勢のキャップCを下流側搬送部15の上流端に当接させ、その当接点を回転支点として前転させ、その姿勢を仰向け姿勢とすることができるように反転部13の溝部14を構成できるものであればよい。
【0077】
図7には、前述の実施形態のキャップ姿勢制御装置1との関係において、反転当接部30が形成される下流側搬送部15の上流端の構成を異ならせたキャップ姿勢制御装置1を示している。なお、この図7(b)の断面図には、搬送路10に天井部62を図示している。
【0078】
このキャップ姿勢制御装置1の下流側搬送部15の上流に設けられた反転当接部30には、キャップCの搬送方向へ向かうに従い、搬送路10の幅方向両側から幅方向中央部へ漸次指向するV字状の切欠き部60の奥部(搬送方向下流側部分)に連通させて、キャップCの搬送方向へ向かうに従い拡開する平面形状台形状の反転キャップ収納部61が、該下流側搬送部15の搬送面に凹状に形成されている。
【0079】
なお、図7に示すキャップ姿勢制御装置1について、各部位間寸法の一例を示すと、図7(c)に示すように、キャップCの外形高さ寸法をH、外形直径寸法をDとすると、搬送路10の幅方向寸法はD+2mm、反転部13における奥部の深さ寸法(キャップCの落差)は、切欠き部60、反転キャップ収納部61共にH/2mmとされている。また、前記延出先端部20はその頂部を搬送路10の幅方向中央の仮想線上に位置させ、幅方向中央の仮想線で線対称に形成されており、延出先端部20を構成している前記溝部14の底面からの垂面(延出先端部垂面)は、平面視において45°の角度で幅方向における搬送路10の側方が搬送方向の上流側へ後退するように形成されている。そして、反転当接部30のV字状の切欠き部60を構成する前記溝部14の底面からの垂面(反転当接部30垂面)と、延出先端部20を構成している前記溝部14の底面からの垂面(延出先端部20垂面)は対向させて形成されており、その間隙寸法はD/2mmとされている。
【0080】
また、対で形成される前記境界点の寸法は(√2/2)D−6mm、対の境界点Pを結んだ仮想境界線と幅方向中央の仮想線との交点と前記延出先端部20の最下流端との間の寸法は(√2/4)D+3mm、反転キャップ収納部61の深さ寸法はH−2mmとされている。
【0081】
また、図7のキャップ姿勢制御装置1は、天井部62を設けてキャップCの搬送路10を四面で囲うように構成されているが、上流側搬送面12および下流側搬送面16と天井部62との間隙寸法は、反転部13を除く部分においてはH+2mm、反転部13においては√{(H/2)2+D2}+2mmとされている。
【0082】
このように構成されたキャップ姿勢制御装置1においては、図7(a)、(b)に示すように、溝部14に搬送方向先端を落下させて前傾した伏せ置き姿勢のキャップCは、反転当接部30において、搬送の慣性力が働いた状態でV字状の切欠き部60から反転キャップ収納部61内に臨むようにして嵌合し、側壁を当接させたその当接点、すなわち、前記V字状の切欠き部60と反転キャップ収納部61との境界点Pを回転支点として搬送方向へ前転し、キャップCの一部を反転キャップ収納部61に一時的に収納しつつ、続いて、天面を反転キャップ収納部61の下流側端辺を構成する下流側搬送面16に当接させて搬送方向へ前転し、下流側搬送面16に仰向け姿勢で着座させる。
【0083】
このように、反転するキャップCの一部を反転キャップ収納部61に一時的に収納可能に構成することで、より確実に伏せ置き姿勢のキャップCを仰向け姿勢に反転することができる。
【0084】
[上流側搬送部11と下流側搬送部15の間隙寸法について]
前述のように、本発明のキャップ姿勢制御装置1は、上流側搬送部11と下流側搬送部15の間隙寸法を、キャップCの種類との関係において調整可能に構成してもよい。
【0085】
例えば、図6に示すキャップ姿勢制御装置において、図8、図9に示すように、底板3の上面に磁石70を埋設しておくとともに、底板3の上面に載置させる、例えば、樹脂などのような非磁性体からなる板状部材4に磁石70に吸着する金属板71を埋設しておき、板状部材4の底板3上の所望の位置において、磁石70と金属板71とを吸着させるように構成し、上流側搬送部11および/または下流側搬送部15の互いの距離を接離させる際には、前記上流側搬送部11および/または下流側搬送部15の底面の磁石70に対する吸着位置を搬送方向において前後させることで、簡単に互いの間隙寸法、すなわち、反転部13における溝部14の搬送方向寸法を調整することができる。
【0086】
その際、底板3の上面にキャップCの搬送方向に延在するスライドガイド溝72を形成するとともに、上流側搬送部11および/または下流側搬送部15を構成する板状部材4の底面にスライド係合突起73を形成し、スライドガイド溝72にスライド係合突起73を係合させるようにして底板3の上面に上流側搬送部11および/または下流側搬送部15を配設するとともに、必要に合わせて、上流側搬送部11および/または下流側搬送部15を、スライドガイド溝72内でスライド係合突起73を搬送方向に前後にスライド移動させることができれば、さらに簡便に反転部13における溝部14の搬送方向寸法を調整することが可能となる。
【0087】
その際、上流側搬送部11および/または下流側搬送部15が搬送路10の搬送方向において接離する寸法に合わせ、上流側搬送部11や下流側搬送部15の中間部には、搬送面を移動するキャップCの移動を妨げることがない形状(図8、図9においては、鋭角なV溝)とされた間隙寸法調整用の調整溝74を形成しておく。
【0088】
このように反転部13の搬送方向の間隙寸法を調整することができれば、該キャップ姿勢制御装置1に供されるキャップCに合わせて、該キャップ姿勢制御装置1の駆動前に予め調整することで、伏せ置き姿勢で反転部13へ搬送されたキャップCをより確実に前傾させ、それに連続して前転させることが可能となる。なお、反転部13の搬送方向の間隙寸法を調整するための手段としては、これに限るものではない。例えば、長穴とその長穴内の所望の位置において螺設されるボルトとを組みあわせた公知のスライド機構を利用してもよい。
【0089】
[溝部の底面から上流側搬送面および下流側搬送面までの深さ寸法について]
また、本発明のキャップ姿勢制御装置1においては、上流側搬送部11および下流側搬送部15は、キャップCの種類との関係において、溝部14の底面から上流側搬送面12および下流側搬送面16までの深さ寸法を調整可能としてもよい。
【0090】
例えば、前述の実施形態の場合において、底板3の上面に載置させる板状部材4の厚さ寸法を異ならせることにより、深さ寸法を調整可能とすることができる。また、その底板3の上面に複数枚の板状部材4を積層載置し、上流側搬送部11および下流側搬送部15における最上面をそれぞれの搬送面とするように構成し、板状部材4の積層数を増減することにより、前記深さ寸法を調整してもよい。
【0091】
このように反転部13の底面から上流側搬送面12および下流側搬送面16までの深さ寸法を調整することができれば、該キャップ姿勢制御装置1に供されるキャップCの凹部の深さ寸法等に合わせて、該キャップ姿勢制御装置1の駆動前に予め調整することで、伏せ置き姿勢で反転部13へ搬送されたキャップCをより確実に前傾させ、それに連続して前転させることが可能となり、該キャップ姿勢制御装置1による姿勢制御の対象となるキャップCの種類を増やすことができる。
【0092】
[キャップの搬送・反転の手段および方法について/その1]
前述の実施形態においては、キャップCを反転させるべく、該キャップCに作用する反転力として、前記搬送路10を下流側が下位に位置するように敷設された搬送路10を滑り落ちる力、すなわち、該キャップCに働く搬送の慣性力を利用している。その該キャップCに働く搬送の慣性力は、前述のように、キャップCの形状等に応じてキャップ姿勢制御装置1を含む搬送路10の傾斜角度を調整することで変化させることができるが、他には、例えば、キャップCを搬送路10に押し出すキャップ繰り出し装置のキャップCの押出力を調整することにより、キャップCに働く搬送の慣性力を調整するように構成してもよい。
【0093】
つまり、キャップ繰り出し装置のキャップCの押出力を調整することなどにより、キャップCの下流側への搬送と、反転部13における伏せ置き姿勢のキャップCの搬送方向への反転に十分な程度に、搬送路10を移動するキャップCに対し慣性力を働かせることができればよい。
【0094】
さらに言えば、本発明のキャップ姿勢制御装置1におけるキャップCの搬送路10は、必ずしも、上流側搬送部11が下流側搬送部15よりも上位に位置するように傾斜させて配設されている必要はなく、例えば、該搬送路10の搬送面が水平であるような場合には、図10に示すように、搬送路10における反転部13の上流側に、キャップCを1つずつ所定の力で反転部13へ向けてある程度のスピードを付与して押し出す押出装置80を設け、その押出装置80によって付与されるキャップCに働く搬送の慣性力を利用して、キャップCを反転させることもできる。なお、この図10においては、前記押出装置80を、同期して反対方向に回転駆動する一対のコントロールホイル81,81により構成し、この両コントロールホイル81,81間において、両コントロールホイル81,81のポケットに収納したキャップCを開放する際に反転部13へ向けてある程度のスピードを付与して押し出すようにした場合を示している。
【0095】
[キャップの搬送・反転の手段および方法について/その2]
図11に示すキャップ姿勢制御装置1は、上流側搬送部11として、搬送路10の幅方向を3分割した中央の帯状領域に、一対のプーリ90に巻回された無端状ベルト91を備えた上流側中央コンベアベルト92が配設され、該無端状ベルト91の上部軌道面を上流側搬送面12として作用させるべく、その回転方向が制御されている。この上流側コンベアベルト92における、キャップCの搬送方向下流端は、図6に示すキャップ姿勢制御装置1と同様、前記延出先端部20を構成する。
【0096】
さらに、前記溝部14を構成する有底の空間を挟んで、下流側搬送部15として、搬送路10の幅方向を3分割した中央の帯状領域に、一対のプーリ93に巻回された無端状ベルト94を備えた下流側中央コンベアベルト95が配設され、無端状ベルト94の上部軌道面を前記下流側搬送面16として作用させるべく、その回転方向が制御されているとともに、その両側方の帯状領域にはそれぞれ、一対のプーリ96,96に巻回された無端状ベルト97,97を備えた側部コンベアベルト98,98が、その上流側端部が前記下流側中央コンベアベルト95の上流側端部よりも上流側に位置するように配設され、前記無端状ベルト97,97の上部軌道面を前記下流側搬送面16として作用させるべく、その回転方向が制御されている。
【0097】
また、図11に示すキャップ姿勢制御装置1は、前記溝部14内における前記側部コンベアベルト98,98の直前部に、一対の反転当接部材99が搬送路の幅方向に離間させて配設されている。各反転当接部材99は、直角三角柱状の部材であり、直角を挟む2つの側面をそれぞれ側壁2と側部コンベアベルト98,98の上流側端部に平行に位置させ、直角に対向する一面を搬送方向上流側における幅方向中央方向へ指向させて配設されており、前記直角に対向する一面を前記反転当接部30として作用させ、該反転部13において伏せ置き姿勢から仰向け姿勢に反転する際にキャップCの外面が当接し、その当接点が回転支点となるように構成されている。また、各反転当接部材99の上面は、上流側搬送部11の上流側中央コンベアベルト92における上部軌道面や、下流側搬送部15の下流側中央コンベアベルト95並びに側部コンベアベルト98,98における上部軌道面と同じ高さに位置するように配設されており、該反転部13を仰向け姿勢のキャップCが通過する際に、該キャップCが溝部14内へ向かって傾斜する前にキャップCの天面の一部が至るように構成されている。
【0098】
このように構成されたキャップ姿勢制御装置1においては、上流側搬送部11を構成するコンベアベルト92の上面に載置したキャップCを所定速度で搬送方向下流側へ送り、下流端にて搬送が解除されたキャップCに伝達される慣性を利用して、キャップCを前転させる。
【0099】
つまり、図11に示すキャップ姿勢制御装置1は、上流側搬送面12および下流側搬送面16を移動する際は、前記キャップCはコンベアベルトの移動によって移動するので、この移動時にキャップCに作用する慣性力は極めて小さいが、上流側中央コンベアベルト92の駆動を下流端にて搬送が解除されたキャップCに押し出しの慣性力が作用するように調整することで、反転部13に至ったキャップCには一定の慣性力を付与することができる。
【0100】
例えば、下流側中央コンベアベルト95および一対の側部コンベアベルト98,98は全て同調させて(同スピードで)回転駆動させ、上流側中央コンベアベルト92は下流側中央コンベアベルト95および一対の側部コンベアベルト98,98よりも若干回転速度を上げるようにすると、反転部13に搬送方向先端から自重で落下していく伏せ置き姿勢のキャップCに搬送力に基づく慣性力をより作用させることができ、該キャップCの前転をさらに促すことができる。
【0101】
よって、仰向け姿勢のキャップCの場合は、上流側搬送部11の搬送面を上流側中央コンベアベルト92の駆動により移動して反転部13に至り、該コンベアベルト92の搬送が解除される際に付与される押し出しの慣性力を利用しつつ、溝部14内へ向かって傾斜する前に下流側搬送部15を構成する各反転当接部材99の上面に亘り、さらに、一対の側部コンベアベルト98,98または下流側中央コンベアベルト95の下流側搬送面16上に移動し、そのまま下流側搬送部15を搬送される。
【0102】
また、伏せ置き姿勢のキャップCの場合は、上流側搬送部11の搬送面を上流側中央コンベアベルト92の駆動により移動して反転部13に至る。その際、伏せ置き姿勢のキャップCは搬送方向先端の周壁解放端が延出先端部20を外れ、自重で溝部14内へ落下していくことで、該キャップCは、溝部14内へ向かって前傾するとともに、上流側中央コンベアベルト92の搬送が解除される際に付与される押し出しの慣性力、さらには、キャップCの搬送方向後端が当接している上流側中央コンベアベルト92の駆動による押し出しによって、該キャップCの外面が反転当接部材99の反転当接部30に当接し、その当接点を回転支点として前転し、仰向け姿勢となって、一対の側部コンベアベルト98,98または下流側中央コンベアベルト95の下流側搬送面16上に着座する。
【0103】
このように、コンベアベルトを配設してキャップCを移送する場合には、そのコンベアベルトの駆動スピードを調整して、キャップCに作用する慣性力を調整することでも、天面を下方に位置させた仰向け姿勢とされたキャップCと、天面を上方に位置させた伏せ置き姿勢とされたキャップCとが混在して搬送される搬送路10において、キャップCを全て一律に仰向け姿勢とすることができる。
【0104】
この構成のキャップ姿勢制御装置1は、特に、キャップCの搬送路10が平坦であるとか、キャップCの搬送方向下流側が上流側より上位に位置するような場合において、特に有効である。そして、従来のシュートのように、キャップCの搬送方向を必ずしも下方へ向ける必要もないので、キャップCの巻締め装置周辺のレイアウト設計の自由度が増すといった効果も得られるものとなる。
【0105】
[キャップの搬送・反転の手段および方法について/その3]
またさらに、キャップCの搬送の慣性力の有無や強弱にかかわらず、搬送路10に(おける前記反転部13の上流側に)反転補助手段100を設け、該反転補助手段100により前記溝部14に搬送方向先端を自重で落下させて前傾した伏せ置き姿勢のキャップCに対し、反転のための外力を加えるようにしてもよい。
【0106】
つまり、反転補助手段100を備えたキャップ姿勢制御装置1を用いて、キャップCの姿勢を一律に仰向け姿勢に制御して下流側へ搬送する場合、すなわち、本発明のキャップCの姿勢制御方法の別の実施形態においては、搬送路10の途中に溝部14を備えた反転部13を形成し、溝部14は、仰向け姿勢で搬送されているキャップCはその上部を通過し、伏せ置き姿勢で搬送されているキャップCは自重でその搬送方向先端を落下させて前傾するように形成する。伏せ置き姿勢で搬送されて反転部13において前傾したキャップCは、搬送路10における反転部13の上流側に設けられた反転補助手段100によって付与される反転のための外力により、その前傾動作に連続させて、該反転部13において搬送方向へ前転し、仰向け姿勢に矯正される。
【0107】
[キャップの搬送・反転の手段および方法について/その3−1]
例えば、反転補助手段100は、溝部14に搬送方向先端を落下させて前傾する伏せ置き姿勢のキャップCにエアを吹き付けて重心の移動を促し、キャップCの前転を補助するように構成されたエア供給手段101であってもよい。
【0108】
具体的には、図12のように、エア供給手段101のエアの吹き出し口102を延出先端部20に設け、キャップCの凹部内(における重心よりも上方の部分)にエアを吹き入れて重心の移動を促し、キャップCの前転を補助することが考えられる。
【0109】
天面が上流側搬送面12に当接した状態となっている仰向け姿勢のキャップCがエアの吹き出し口102を通過する場合には、前記天面によってエアが周囲に分散されることにより、該キャップCの姿勢が傾くことはなく、キャップCの周壁開放端が上流側搬送面12に当接した状態となっている伏せ置き姿勢のキャップCがエアの吹き出し口102を通過する場合には、エアジェットが働き、前記溝部14に搬送方向先端を落下させて前傾する伏せ置き姿勢のキャップCの凹部内にエアを吹き込むことで重心の移動を促し、該キャップCの前転を補助することができる。
【0110】
このように、エアをキャップCの搬送中は常に吹き出しているようにしても、該エアが仰向け姿勢のキャップCの回転に作用することはないので、反転部13に至るキャップCの姿勢を判別するキャップ姿勢制御装置1を別途設ける必要はなく、経済的である。
【0111】
なお、キャップCの姿勢を制御するためには、反転部13にはキャップCが1つづつ間隔をあけて供給されることが望ましい。そこで、上流側搬送部11に搬送するキャップCを1つずつ間欠的に供給するべく、公知のコントロールホイルのような切り離し手段(図10の押出装置80のコントロールホイル81(片側)参照)を別途設けることも有効であり、その場合には、その切り離し手段の駆動タイミングとリンクさせて、キャップCがエア吹き出し口102に至ったタイミングを図って、瞬間的にエアを吹き出すように形成することも可能である。
【0112】
勿論、前記エア供給装置100と合わせて反転部13に至るキャップCを検出するキャップ検出手段を別途設けた場合には、エアの吹き出しのタイミングを、キャップCがエア吹き出し口102に至るときに的確に合わせることも可能となり、エアジェットを用いて前転を補助することにより、確実に伏せ置き姿勢で搬送されているキャップCの姿勢を、仰向け姿勢に反転させることができる。
【0113】
また、反転部13に至るキャップCの姿勢を判別するキャップ姿勢判断手段を別途設けた場合には、伏せ置き姿勢で搬送されているキャップCがエアの吹き出し口に至るときにのみ、エアを吹き出させることができる。
【0114】
[キャップの搬送・反転の手段および方法について/その3−2]
また、このように反転部13に至るキャップCの姿勢を判別するキャップ姿勢判断手段を設けた場合、反転補助手段100は、上流側搬送部11の下流端近傍に配設され、キャップCの通過に合わせて、溝部14に搬送方向先端を落下させて前傾する伏せ置き姿勢のキャップCの搬送方向後端を押し上げてキャップCの前転を補助するように構成された押し上げ手段103であってもよい。
【0115】
具体的には、図13のように、上流側搬送面12からの突き出しと引き込みを可能に往復動するように構成されたピン部材104を有する押し上げ手段103の、前記ピン部材の出入り口105を延出先端部20に設け、溝部14に搬送方向先端を落下させて前傾する伏せ置き姿勢のキャップCの搬送方向後端をピン部材104で押し上げ、さらに前傾させることにより重心の移動を促してキャップCの反転を補助するようにするとよい。押し上げ動作が完了した後は、ピン部材104を出入り口105に引き込むようにすることは言うまでもない。
【0116】
また、反転空隙部21が比較的大きく形成されているような場合には、一端を揺動支点として回動自在に上流側搬送部11の下流端近傍の反転空隙部21に配設された片部材を備える押し上げ手段の前記片部材を、前記溝部14に搬送方向先端を落下させて前傾する伏せ置き姿勢のキャップCの該反転空隙部21に収められている周壁解放端に下方から当接させ、搬送方向後端を押し上げてキャップCの前転を補助することが考えられる。
【0117】
このように押し上げ部材を配設した場合においても、伏せ置き姿勢で搬送されているキャップCに前転のための外力として、ピン部材104や片部材を作用させて、より確実に、その姿勢を仰向け姿勢に反転させることができる。
【0118】
[キャップの搬送・反転の手段および方法について/その3−3]
さらに、反転補助手段100は、キャップCの搬送方向へ回転する回転体106が前記反転部13の上方に配設され、仰向け姿勢で反転部13に搬送されるキャップCに対しては接触することなく、前記溝部14に搬送方向先端を落下させて前傾するキャップCに対しては、前傾姿勢のキャップCの最上部位となる搬送方向後端に摺接してキャップCを搬送方向へ押し出し、キャップCの前転を補助するように構成された補助ローラ手段107であってもよい。
【0119】
具体的には、補助ローラ手段107は、図14に示すように、回転体106としての複数個のプーリ109に巻回された無端状ベルト108を上流側搬送面12を移動するキャップCの上端部分の軌道の直上位置に臨ませ、キャップCの搬送方向へ無端状ベルト108を回転させて前記溝部14に搬送方向先端を落下させて前傾する伏せ置き姿勢のキャップCの最上部に摺接させ、該キャップCを搬送方向へ押し出すように構成されている。また、図14において、キャップCに対する当接位置に配設されたプーリ109は、回転軸にばね等でクッション性を付与し、キャップCに摺接した際に自身が多少上下に揺動可能とするとともに、図示しない展張ローラで該無端状ベルト108にテンションを付与するように構成するとよい。
【0120】
さらに、補助ローラ手段107は、図15に示すように、回転体106としての回転軸で回転するローラ110を上流側搬送面12を移動するキャップCの上端部分の軌道の直上位置に臨ませ、キャップCの搬送方向へ回転するローラ表面を溝部14に搬送方向先端を落下させて前傾する伏せ置き姿勢のキャップCの最上部に摺接させ、該キャップCを搬送方向へ押し出して前転を促すように構成されている。該ローラ110の表面は、図15に示すように、細かな突起111が林立して形成されていてもよい。
【0121】
この補助ローラ手段107を配設する場合、キャップCは、どのような手段によって搬送されてもよく、反転部13に至ったキャップC自身に搬送の慣性力が働いていなくてもよい。例えば、図11に示すような、上流側搬送部11および下流側搬送部15がコンベアベルトにより構成されているような場合において、反転部13に搬送方向先端を落下させて前傾する伏せ置き姿勢のキャップCに、確実にキャップCの搬送方向へ回転する無端状ベルト108やローラ110等の回転体106が摺接し、搬送方向へ前転する反転力を付与することができる。
【0122】
なお、本発明のキャップ姿勢制御方法およびキャップ姿勢制御機構、並びにキャップ姿勢制御装置は、その要旨を逸脱しない範囲で種々変形実施できることは勿論である。
【0123】
また、本発明における姿勢制御の対象のキャップCは、必ずしも寸胴の円筒体である必要はなく、周壁が基本的に円筒体であればよい。例えば、周壁解放端外周にフランジが形成されているようなキャップCであっても、本発明による姿勢制御の対象となりうる。
【符号の説明】
【0124】
C キャップ
1 キャップ姿勢制御装置
2 側壁(側方ガイド部材)
3 底板
4 板状部材
10 搬送経路
11 上流側搬送部
12 上流側搬送面
13 反転部
14 溝部
15 下流側搬送部
16 下流側搬送面
20 延出先端部
21 反転空隙部
30 反転当接部
40 ガイド壁
41 スライド板
42 スライドガイド溝
43 止めねじ
50 搬送部空隙部
60 切欠き部
61 反転キャップ収納部
62 天板部
70 磁石
71 金属板
72 スライドガイド溝
73 スライド係合突起
74 調整溝
80 押出装置
81 コントロールホイル
90 プーリ
91 無端状ベルト
92 上流側中央コンベアベルト
93 プーリ
94 無端状ベルト
95 下流側中央コンベアベルト
96 プーリ
97 無端状ベルト
98 側部コンベアベルト
99 反転当接部材
100 反転補助手段
101 エア供給手段
102 エア吹き出し口
103 押し上げ手段
104 ピン部材
105 出入り口
106 回転体
107 補助ローラ手段
108 無端状ベルト
109 プーリ
110 ローラ
111 突起
【特許請求の範囲】
【請求項1】
一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされたキャップの搬送路に形成された溝部を備える反転部において、該反転部へ仰向け姿勢で搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部上を通過させて下流側へ送り、伏せ置き姿勢で搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させて前傾させたあと、前記搬送力に基づく慣性力および/または反転のために該キャップに加える外力により、その前傾動作に連続させて、搬送方向下流側へ前転させ、仰向け姿勢に制御して下流側へ送ることを特徴とするキャップの姿勢制御方法。
【請求項2】
一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされ、キャップの搬送路に、該搬送路を上流側搬送部と下流側搬送部とに分断する溝部を有し、該溝部は仰向け姿勢で上流側搬送部を搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部上を通過させて下流側搬送部へ送り、伏せ置き姿勢で上流側搬送部を搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させて前傾させたあと、前記搬送力に基づく慣性力および/または反転のために該キャップに加える外力により、その前傾動作に連続させて、搬送方向下流側へ前転させ、仰向け姿勢に制御して下流側搬送部へ送るように構成された反転部が形成されていることを特徴とするキャップ姿勢制御機構。
【請求項3】
一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされたキャップが仰向け姿勢で搬送されることを要する装置へ向かう搬送路の少なくとも一部を構成するように配設され、
一対の側方ガイド部材間において、該搬送路を、上流側搬送面を有する上流側搬送部と、凹状に形成された溝部を備える反転部と、下流側搬送面を有する下流側搬送部とから構成し、
前記上流側搬送部の上流側搬送面の下流端には、搬送路の幅方向中央を搬送方向へ延出させて、前記反転部の溝部に搬送方向先端を落下させた伏せ置き姿勢のキャップの凹部内に収まるように形成された延出先端部と、前記延出先端部の前記一対の側壁間における幅方向両側方には、搬送方向先端を前記溝部に落下させた伏せ置き姿勢のキャップの周壁開放端を位置させる反転空隙部が形成されており、
前記下流側搬送部における上流端には、搬送方向先端を前記反転部の溝部に落下させた伏せ置き姿勢のキャップを当接係合させる反転当接部が形成され、
前記溝部は、仰向け姿勢で上流側搬送部を搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部上を通過させて前記下流側搬送部へ送り、 伏せ置き姿勢で上流側搬送部を搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させ、前記延出先端部を凹部に納めるようにして前傾させたあと、その前傾動作に連続させて、前記搬送力に基づく慣性力により前記反転当接部に当接させ、その当接点を回転支点として搬送方向へ前転させ、仰向け姿勢に制御して下流側搬送部へ送るように構成されていることを特徴とするキャップ姿勢制御装置。
【請求項4】
一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされたキャップが仰向け姿勢で搬送されることを要する装置へ向かう搬送路の少なくとも一部を構成するように配設され、
一対の側方ガイド部材間において、該搬送路を、上流側搬送面を有する上流側搬送部と、凹状に形成された溝部を備える反転部と、下流側搬送面を有する下流側搬送部とから構成し、
前記上流側搬送部の上流側搬送面の下流端には、搬送路の幅方向中央を搬送方向へ延出させて、前記反転部の溝部に搬送方向先端を落下させた伏せ置き姿勢のキャップの凹部内に収まるように形成された延出先端部と、前記延出先端部の前記一対の側壁間における幅方向両側方には、搬送方向先端を前記溝部に落下させた伏せ置き姿勢のキャップの周壁開放端を位置させる反転空隙部が形成されており、
前記下流側搬送部における上流端には、搬送方向先端を前記反転部の溝部に落下させた伏せ置き姿勢のキャップを当接係合させる反転当接部が形成され、
前記反転部には、搬送方向下流側を前記反転部の溝部に落下させた伏せ置き姿勢のキャップに、反転のための外力を付与する反転補助手段が配設されており、
前記溝部は、仰向け姿勢で上流側搬送部を搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部上を通過させて前記下流側搬送部へ送り、 伏せ置き姿勢で上流側搬送部を搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させ、前記延出先端部を凹部に納めるようにして前傾したあと、その前傾動作に連続させて、前記搬送力に基づく慣性力と前記反転補助手段によって該キャップに加えられる外力とにより、前記反転当接部に当接させ、その当接点を回転支点として搬送方向へ前転させ、仰向け姿勢に制御して下流側搬送部へ送るように構成されていることを特徴とするキャップ姿勢制御装置。
【請求項5】
一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされたキャップが仰向け姿勢で搬送されることを要する装置へ向かう搬送路の少なくとも一部を構成するように配設され、
一対の側方ガイド部材間において、該搬送路を、上流側搬送面を有する上流側搬送部と、凹状に形成された溝部を備える反転部と、下流側搬送面を有する下流側搬送部とから構成し、
前記上流側搬送部の上流側搬送面の下流端には、搬送路の幅方向中央を搬送方向へ延出させて、前記反転部の溝部に搬送方向先端を落下させた伏せ置き姿勢のキャップの凹部内に収まるように形成された延出先端部と、前記延出先端部の前記一対の側壁間における幅方向両側方には、搬送方向先端を前記溝部に落下させた伏せ置き姿勢のキャップの周壁開放端を位置させる反転空隙部が形成されており、
前記下流側搬送部における上流端には、搬送方向先端を前記反転部の溝部に落下させた伏せ置き姿勢のキャップを当接係合させる反転当接部が形成され、
前記反転部には、搬送方向下流側を前記反転部の溝部に落下させた伏せ置き姿勢のキャップに、反転のための外力を付与する反転補助手段が配設されており、
前記溝部は、仰向け姿勢で上流側搬送部を搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部上を通過させて前記下流側搬送部へ送り、 伏せ置き姿勢で上流側搬送部を搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させ、前記延出先端部を凹部に納めるようにして前傾したあと、その前傾動作に連続させて、前記反転補助手段によって該キャップに加えられる外力により、前記反転当接部に当接させ、その当接点を回転支点として搬送方向へ前転させ、仰向け姿勢に制御して下流側搬送部へ送るように構成されていることを特徴とするキャップ姿勢制御装置。
【請求項6】
前記上流側搬送部および/または前記下流側搬送部は、前記一対の側壁間における幅方向の中央部に搬送面が形成され、該搬送面と前記一対の側壁との間には、該搬送面から凹状に形成された搬送路空隙部が形成されていることを特徴とする請求項3乃至請求項5のいずれか1項に記載のキャップ姿勢制御装置。
【請求項7】
前記一対の側壁はそれぞれ対向方向において接離可能に形成されていることを特徴とする請求項3乃至請求項6のいずれか1項に記載のキャップ姿勢制御装置。
【請求項8】
前記上流側搬送部および/または前記下流側搬送部はキャップの搬送方向において接離可能に形成されていることを特徴とする請求項3乃至請求項7のいずれか1項記載のキャップ姿勢制御装置。
【請求項1】
一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされたキャップの搬送路に形成された溝部を備える反転部において、該反転部へ仰向け姿勢で搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部上を通過させて下流側へ送り、伏せ置き姿勢で搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させて前傾させたあと、前記搬送力に基づく慣性力および/または反転のために該キャップに加える外力により、その前傾動作に連続させて、搬送方向下流側へ前転させ、仰向け姿勢に制御して下流側へ送ることを特徴とするキャップの姿勢制御方法。
【請求項2】
一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされ、キャップの搬送路に、該搬送路を上流側搬送部と下流側搬送部とに分断する溝部を有し、該溝部は仰向け姿勢で上流側搬送部を搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部上を通過させて下流側搬送部へ送り、伏せ置き姿勢で上流側搬送部を搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させて前傾させたあと、前記搬送力に基づく慣性力および/または反転のために該キャップに加える外力により、その前傾動作に連続させて、搬送方向下流側へ前転させ、仰向け姿勢に制御して下流側搬送部へ送るように構成された反転部が形成されていることを特徴とするキャップ姿勢制御機構。
【請求項3】
一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされたキャップが仰向け姿勢で搬送されることを要する装置へ向かう搬送路の少なくとも一部を構成するように配設され、
一対の側方ガイド部材間において、該搬送路を、上流側搬送面を有する上流側搬送部と、凹状に形成された溝部を備える反転部と、下流側搬送面を有する下流側搬送部とから構成し、
前記上流側搬送部の上流側搬送面の下流端には、搬送路の幅方向中央を搬送方向へ延出させて、前記反転部の溝部に搬送方向先端を落下させた伏せ置き姿勢のキャップの凹部内に収まるように形成された延出先端部と、前記延出先端部の前記一対の側壁間における幅方向両側方には、搬送方向先端を前記溝部に落下させた伏せ置き姿勢のキャップの周壁開放端を位置させる反転空隙部が形成されており、
前記下流側搬送部における上流端には、搬送方向先端を前記反転部の溝部に落下させた伏せ置き姿勢のキャップを当接係合させる反転当接部が形成され、
前記溝部は、仰向け姿勢で上流側搬送部を搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部上を通過させて前記下流側搬送部へ送り、 伏せ置き姿勢で上流側搬送部を搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させ、前記延出先端部を凹部に納めるようにして前傾させたあと、その前傾動作に連続させて、前記搬送力に基づく慣性力により前記反転当接部に当接させ、その当接点を回転支点として搬送方向へ前転させ、仰向け姿勢に制御して下流側搬送部へ送るように構成されていることを特徴とするキャップ姿勢制御装置。
【請求項4】
一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされたキャップが仰向け姿勢で搬送されることを要する装置へ向かう搬送路の少なくとも一部を構成するように配設され、
一対の側方ガイド部材間において、該搬送路を、上流側搬送面を有する上流側搬送部と、凹状に形成された溝部を備える反転部と、下流側搬送面を有する下流側搬送部とから構成し、
前記上流側搬送部の上流側搬送面の下流端には、搬送路の幅方向中央を搬送方向へ延出させて、前記反転部の溝部に搬送方向先端を落下させた伏せ置き姿勢のキャップの凹部内に収まるように形成された延出先端部と、前記延出先端部の前記一対の側壁間における幅方向両側方には、搬送方向先端を前記溝部に落下させた伏せ置き姿勢のキャップの周壁開放端を位置させる反転空隙部が形成されており、
前記下流側搬送部における上流端には、搬送方向先端を前記反転部の溝部に落下させた伏せ置き姿勢のキャップを当接係合させる反転当接部が形成され、
前記反転部には、搬送方向下流側を前記反転部の溝部に落下させた伏せ置き姿勢のキャップに、反転のための外力を付与する反転補助手段が配設されており、
前記溝部は、仰向け姿勢で上流側搬送部を搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部上を通過させて前記下流側搬送部へ送り、 伏せ置き姿勢で上流側搬送部を搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させ、前記延出先端部を凹部に納めるようにして前傾したあと、その前傾動作に連続させて、前記搬送力に基づく慣性力と前記反転補助手段によって該キャップに加えられる外力とにより、前記反転当接部に当接させ、その当接点を回転支点として搬送方向へ前転させ、仰向け姿勢に制御して下流側搬送部へ送るように構成されていることを特徴とするキャップ姿勢制御装置。
【請求項5】
一面側に平滑な天面を有し、他面側に凹部を有する円筒体とされたキャップが仰向け姿勢で搬送されることを要する装置へ向かう搬送路の少なくとも一部を構成するように配設され、
一対の側方ガイド部材間において、該搬送路を、上流側搬送面を有する上流側搬送部と、凹状に形成された溝部を備える反転部と、下流側搬送面を有する下流側搬送部とから構成し、
前記上流側搬送部の上流側搬送面の下流端には、搬送路の幅方向中央を搬送方向へ延出させて、前記反転部の溝部に搬送方向先端を落下させた伏せ置き姿勢のキャップの凹部内に収まるように形成された延出先端部と、前記延出先端部の前記一対の側壁間における幅方向両側方には、搬送方向先端を前記溝部に落下させた伏せ置き姿勢のキャップの周壁開放端を位置させる反転空隙部が形成されており、
前記下流側搬送部における上流端には、搬送方向先端を前記反転部の溝部に落下させた伏せ置き姿勢のキャップを当接係合させる反転当接部が形成され、
前記反転部には、搬送方向下流側を前記反転部の溝部に落下させた伏せ置き姿勢のキャップに、反転のための外力を付与する反転補助手段が配設されており、
前記溝部は、仰向け姿勢で上流側搬送部を搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部上を通過させて前記下流側搬送部へ送り、 伏せ置き姿勢で上流側搬送部を搬送されているキャップは該キャップに働く自重により前記溝部へ搬送方向先端から落下させ、前記延出先端部を凹部に納めるようにして前傾したあと、その前傾動作に連続させて、前記反転補助手段によって該キャップに加えられる外力により、前記反転当接部に当接させ、その当接点を回転支点として搬送方向へ前転させ、仰向け姿勢に制御して下流側搬送部へ送るように構成されていることを特徴とするキャップ姿勢制御装置。
【請求項6】
前記上流側搬送部および/または前記下流側搬送部は、前記一対の側壁間における幅方向の中央部に搬送面が形成され、該搬送面と前記一対の側壁との間には、該搬送面から凹状に形成された搬送路空隙部が形成されていることを特徴とする請求項3乃至請求項5のいずれか1項に記載のキャップ姿勢制御装置。
【請求項7】
前記一対の側壁はそれぞれ対向方向において接離可能に形成されていることを特徴とする請求項3乃至請求項6のいずれか1項に記載のキャップ姿勢制御装置。
【請求項8】
前記上流側搬送部および/または前記下流側搬送部はキャップの搬送方向において接離可能に形成されていることを特徴とする請求項3乃至請求項7のいずれか1項記載のキャップ姿勢制御装置。
【図1】



【図2】
【図3】

【図4】

【図5】

【図6】
【図7】

【図8】
【図9】

【図10】
【図11】
【図12】
【図13】

【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−52953(P2013−52953A)
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願番号】特願2011−191696(P2011−191696)
【出願日】平成23年9月2日(2011.9.2)
【出願人】(390029090)靜甲株式会社 (30)
【Fターム(参考)】
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願日】平成23年9月2日(2011.9.2)
【出願人】(390029090)靜甲株式会社 (30)
【Fターム(参考)】
[ Back to top ]