
キャビテーション効果を利用するパルス化された超音波動力供給のためのシステム及び方法
【課題】本発明は、水晶体超音波吸引術などの外科的処置の間にエネルギを供給する方法及び装置に関する。
【解決手段】本発明に係る方法及び装置は、外科的処置の間にエネルギを供給する方法及び装置を含み、一時的キャビテーションを誘導するのに十分なレベル及び期間でエネルギを印加することと、第2の非ゼロのより低い超音波エネルギ期間に印加した後、印加されるエネルギを減衰することとを行う。本発明に係る方法及び装置によって、キャビテーションに係る有益点を利用し、従前の組織除去システムに係る欠点を最小化するシステムを提示することは、有用なことである。
【解決手段】本発明に係る方法及び装置は、外科的処置の間にエネルギを供給する方法及び装置を含み、一時的キャビテーションを誘導するのに十分なレベル及び期間でエネルギを印加することと、第2の非ゼロのより低い超音波エネルギ期間に印加した後、印加されるエネルギを減衰することとを行う。本発明に係る方法及び装置によって、キャビテーションに係る有益点を利用し、従前の組織除去システムに係る欠点を最小化するシステムを提示することは、有用なことである。
【発明の詳細な説明】
【技術分野】
【0001】
[発明の背景]
[発明の分野]
本発明は、概略、外科組織除去システムの分野に関し、特に、水晶体超音波吸引術などの外科的処置の際の変調パルス超音波動力供給に関する。本出願は、2002年10月21日出願、発明者Kadziauskas等の“新規の拡張されたマイクロバースト超音波動力供給システム及び方法”という名称の米国特許出願第10/278,775号の一部継続出願であり、その全部が参照の上本明細書に組み込まれる。
【背景技術】
【0002】
[関連技術の説明]
水晶体超音波吸引術は、白内障などの目に関する問題点の治療において成功裏に利用されている。水晶体超音波吸引手術は角膜切り口を利用し、少なくとも一つの水晶体超音波吸引術の携帯外科器具、即ちハンドピースの先端を挿入する。ハンドピースは、切り口の内部に配置されると超音波駆動されて眼レンズを乳状化し、若しくは混濁部を砕き微細片にする針を含む。砕かれた混濁部微細片は、続いて、制御されつつ同じハンドピース若しくは別のハンドピースを用いて、除去され得る。医師は、切り口を介してレンズインプラントを眼の中に挿入し得る。切り口は癒合されてもよく、その結果患者は通常劇的に視力が良くなる。
【0003】
公知のように、水晶体超音波吸引術ハンドピースの流体注入若しくは摘出システム、及び動力制御を介する、患者への及び患者からの流体の流れは、実施される処置にとって重大事項である。種々の医学的に認可されてきた技術が、手術のレンズ除去部位に対して用いられている。とりわけ、一つの評判のよい技術は、単一のハンドピースを利用する、水晶体超音波吸引術、洗浄、及び吸引の同時の組み合わせである。この方法は、切り口を形成すること、携帯手術器具を挿入し混濁部即ち眼レンズを乳状化することを含む。この乳状化と同時に、ハンドピースは、乳状化されたレンズの洗浄のための流体と、乳状化されたレンズ及び挿入された流体の吸引のための減圧とを、与える。
【0004】
現下利用可能な水晶体超音波吸引術システムは、可変速度蠕動ポンプ、減圧センサ、調整可能な超音波動力源、及び、吸引速度と減圧と動力レベルを制御するためのオペレータ選択プリセットを伴うプログラマブルマイクロプロセッサを、含む。水晶体超音波吸引術ハンドピースは、圧電性トランスデューサに動力を与え制御するための制御コンソールと、電気ケーブルにより相互に接続する。管により、眼に対する洗浄流体が与えられ、眼からハンドピースを介する流体の吸引回収が可能になる。ハンドピースの中空針は通常、印加される交流電圧により形成される水晶内の圧電効果により、長手軸に沿って駆動され励起される。駆動された水晶の動きはハンドピース内部の機械的共鳴システムにより増幅され、接続する針の動きが、結晶が駆動される周波数に直接に依存し、共鳴周波数で最大限の動きが発生するようにする。共鳴周波数は、相互に接続し、水晶により通常振動する針の質量に一部依存する。
【0005】
水晶体超音波吸引術ハンドピースで用いられる周波数の通常の範囲は、約25kHzと約50kHzの間である。特定のハンドピースインピーダンス及び位相により特徴付けられ得る個々の水晶体超音波吸引術ハンドピースに対して、周波数領域が存在する。上記周波数領域は、上位周波数と下位カットオフ周波数により、境界付けされる。この領域の中心は通常、ハンドピース電気位相が最大値に到達するポイントである。
【0006】
ハンドピース動力移転効率は、式(V*I)(COSΦ)で与えられ、ここでΦ
は位相角度である。この動力移転効率式を利用すると、最も効率的なハンドピース稼動ポイントは、位相が0°に再接近するときに発生する。従って、最適なハンドピース動力移転効率は、できるだけ0°に近い位相値を達成するため動力周波数を制御することを要求する。この目的の達成は、超音波ハンドピースの位相角度はトランスデューサの装荷(loading)にも依存するという事実により、面倒なものになっている。トランスデューサの装荷(loading)は、針を含む機械的共鳴ハンドピースシステムを介して発生する。
【0007】
結果として、位相角度は、操作の間常時判定されて計測され、駆動回路を調整し、最適位相角度に到達し、水晶体超音波吸引術ハンドピースにより一定のエネルギを組織の中に有効に移す。ハンドピースの自動チューニングは、ハンドピース電気信号をモニタし、選択パラメータとの整合性を維持するように周波数を調整することにより、実現され得る。水晶体超音波吸引術ハンドピースのための制御回路は、通常位相検出器とされる、電圧と電流の間の位相を計測する回路を、含んでもよい。水晶体超音波吸引術ハンドピースの操作周波数とは無関係に位相シフトが計測されると、困難が生じる可能性がある。なぜならば、位相シフトはハンドピース操作周波数に依存し、計測における時間遅延はハンドピースの共鳴チューニングのための複雑な較正回路を要求するからである。
【0008】
水晶体超音波吸引術ハンドピースの動力制御は、水晶体超音波吸引手術の成功に対して非常に重要である。ある従前のシステムは、ハンドピース圧電性トランスデューサに印加される電圧と圧電性トランスデューサにより生じる電流との間の位相角度、及び/又は、ハンドピースに加えられる動力パルスの振幅に基づいて、水晶体超音波吸引術ハンドピースのための動力を制御することを要求することを扱う。特定のハンドピースに対して通常の構成が適合され、医師/オペレータの制御に従属して、連続する若しくは一連の固体バーストにて、動力が加えられる。例えば、システムは、150m秒動力を加え、35m秒動力を停止し、動力印加の必要期間、このオン/オフシーケンスを繰り返してもよい。この例では、動力は、水晶体超音波吸引術ハンドピースの圧電性水晶を介して針に加えられ、これにより150m秒超音波動力放出を生じ、更に350m秒水晶、ハンドピース及び針を利用した動力の印加を停止する。この例で動力は150m秒印加されるが、この動力の印加は、概略25kHzと50kHzの間の周波数での圧電性水晶へのシヌソイド波形の印加を含み、従って真には“一定”ではない、ということが理解される。150m秒の期間の動力の印加は、25kHz〜50kHzのシヌサイドの一定の印加と定義される。ある状況では、医師/オペレータは、ある期間これら動力バーストを印加することを、動力の印加を停止し、この動力セッティング若しくは別の動力セッティングで再印加しようとしてもよい。バーストの周波数及び周期は、作用される領域に加えられるバーストのストリームの長さと同様に、通常制御可能である。動力が印加されない期間により、作用される領域でのキャビテーション形成が可能になり、このことによりハンドピース若しくは吸引装置によりもたらされる吸引を利用して破壊された破片の除去が可能になる。
【0009】
更に、医師/オペレータは、レンズを壊す“スカルプ”処置や、核を集め破砕片の強い保持を維持する“チョップ”処置などの、公知の処置を用いようとしてもよい。これらの特別な“チョップ若しくはクオドラント除去”処置は通常、概略50m秒〜200m秒の期間のどの一定のスパンででも動力若しくはエネルギを加えることを、含む。
【0010】
動力のオン/オフ印加により、混濁部の砕片への破壊及び相対的に効率のよい除去が促進される。水晶体超音波吸引術ハンドピースの中の超音波駆動針は利用中に暖かくなるが、このことは一部において水晶体超音波吸引術ハンドピース先端の機械的動きのために生じる摩擦熱の結果である。ある状況では、作用される領域へ連続モードで動力を加える前述の方法は、作用される領域内に無視できない量の熱を生成してしまう。針を通過する洗浄/吸引流体はこの熱を散らせるのに利用され得るが、水晶体超音波吸引術の間に眼の組織のオーバヒートを回避するように留意されねばならず、ある状況では流体の循環は熱を十分には散らし得ない。熱を加えてしまうことによって、作用される領域を損傷するリスクは、相当に否定的側面の効果となり得る。
【0011】
更に、前述の方法での動力の印加は、ある状況では、乱れ及び/又はガタガタ音、更に、領域を解放し粒子を除去するのに相当の流体の利用を要求するような重要な流れ流出を生じることがある。また、一定のグループのエネルギの印加は、印加されるエネルギから結果的に生じるキャビテーションのために、核の破片をハンドピースの先端から押し出してしまうことがある。そのようなキャビテーション状況内に破片を収集して配置することは、多くの状況で困難なことである。この結果の効果は望ましくないものであり、できるだけ最小化すべきものである。
【0012】
この状況で有効に利用される一つのシステムは、発明者Kadziauskas等であり、2002年10月21日に出願され、本出願の譲受人であるアドバンストメディカルオプティクス,インコーポレイティッドに譲渡された米国特許出願10/278,775(特許文献1)に開示される。’775出願(特許出願1)は、長期間における短期のポーズにより散在させられる比較的短時間の動力の印加を利用する超音波動力供給のためのものであり、動力印加の各々の長期間の後には長い停止期間が置かれる。この発明により、従前の一定動力の印加に係る熱の問題が生じることなく、エネルギの印加が可能になる。
【0013】
’775出願(特許出願1)の発明で示された効果を超える有益な効果が、既述の状況でのキャビテーションに係る有益な効果を利用することにより取得され得る、ということを、確実な発展が示している。あるタイプのキャビテーション形成は、ある状況での閉塞の解体の改良のためのものである。キャビテーションの有益な効果を理解し利用することは、従前の発明では生じる熱が発生することなく水晶体超音波吸引処置にて核を十分に除去することに向けられている。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】米国特許出願10/278,775
【発明の概要】
【発明が解決しようとする課題】
【0015】
既述の事項に基づいて、キャビテーションに係る有益点を利用し従前の組織除去システムに係る欠点を最小化するシステムを、提示することは、有用なことである。
【課題を解決するための手段】
【0016】
[発明の概要]
本発明の第1の実施形態では、外科的状況内部で実施される外科的処置の間にエネルギを供給するための方法が示される。上記方法は、流体内部に一時的キャビテーションを十分に誘導する第1のエネルギレベルでエネルギを印加する工程と、流体内部で一時的キャビテーションを達成した後の所定の期間にエネルギを与える工程とを含む。上記のエネルギを与える工程は、第1のエネルギレベルより低い第2のエネルギレベルでエネルギを印加する工程を含む。
【0017】
本発明の第2の実施形態では、流体に関連して利用される組織除去処置の間に超音波エネルギを供給する方法が示される。上記方法は、流体内部で一時的キャビテーションを誘導できる高エネルギ振幅でエネルギを印加する工程と、低エネルギ振幅でエネルギを与え、これにより超音波エネルギ伝導からの組織損傷を最小化する効果を生じる工程とを含む。
【0018】
本発明の第3の実施形態では、流体を含む外科的領域に一時的エネルギを印加する手段を含む外科的装置が示される。前記の一時的エネルギを印加することは、流体内部に一時的キャビテーションを十分に誘導する振幅及び期間でエネルギを印加することを意味する。装置は、上記期間に続いて、より低い振幅エネルギレベルに上記一時的エネルギを減衰し、これによりエネルギ関連障害の危険を減衰する手段も含む。
【0019】
本発明の第4の実施形態では、水晶体超音波吸引処置の間に眼領域に変調された超音波エネルギを与える方法が示される。上記方法は、眼領域内の流体内部に一時的キャビテーションを誘導する計算された高エネルギレベルで眼領域にエネルギを与える工程であって、第1の所定の期間に発生する工程と、上記第1の所定の期間の後に眼領域へのエネルギの印加を減衰する工程と、第2の所定の期間待機する工程と、眼領域への上記印加と減衰を繰り返す工程とを含む。
【0020】
本発明の第5の実施形態では、針とその針を超音波振動する電気的手段とを有するハンドピースと、ハンドピース電気的手段にパルス化された電気的動力を与える動力源手段と、オペレータに電気的パルスの振幅を選択させるインプット手段と、ハンドピース針から流体を与える手段と、関連する流体を有する外科的状況内で行われる外科的処置の間にハンドピースに供給される動力を制御する制御手段とを含む装置が示される。上記制御手段は、流体内に一時的キャビテーションを誘導するのに十分なレベル及び期間で動力を印加することと、上記期間の後より低いレベルへ動力を減衰し、これにより障害の見込みを減少することとにより、供給される動力を制御する。
【0021】
本発明の第6の実施形態では、針とその針を超音波振動する電気的手段とを有するハンドピースと、ハンドピース電気的手段にパルス化された電気的動力を与える動力源手段と、オペレータに電気的パルスの振幅を選択させるインプット手段と、ハンドピース針から流体を与える手段と、ハンドピースに供給される動力を制御する制御手段とを含む方法が示される。上記制御手段は、利用される外科的状況内部で一時的キャビテーションを誘導するように計算されたレベル及び期間で動力を印加することにより、供給される動力を制御する。
【0022】
本発明の第7の実施形態では、一つの状況で超音波エネルギを供給する方法が示される。上記方法は、上記状況で一時的キャビテーションを誘導するのに十分なレベル及び期間で超音波エネルギを初期に印加する工程と、第2の非ゼロのより低い超音波エネルギ期間に印加した後、印加される超音波エネルギを減衰する工程とを含む。
【0023】
本発明の第8の実施形態では、泡を含む状況の内部で超音波エネルギを供給する方法が示される。上記方法は、一時的キャビテーションを中に十分に誘導するように上記状況の内部に相対的に高いレベルの超音波エネルギを印加する工程を含む。上記一時的キャビテーションは、超音波エネルギに係る力によって、上記状況の内部で泡相対的に速く膨張し激しく崩壊することを含む。
【発明の効果】
【0024】
添付の図面に示される好適な実施形態に関する添付の詳細な開示を読めば、本発明の全ての実施形態に関するこれら及び他の目的及び利点は当業者には明白となる。
【0025】
本発明は、添付の図面において、例として示されるのであり、限定として示されるものではない。
【図面の簡単な説明】
【0026】
【図1】本発明の一つの実施形態に係る水晶体超音波吸引システムの機能ブロック図である。
【図2】ハンドピースに対する一つ以上の圧力による洗浄流体を供給する装置を含む別の実施形態に係る水晶体超音波吸引システムの機能ブロック図である。
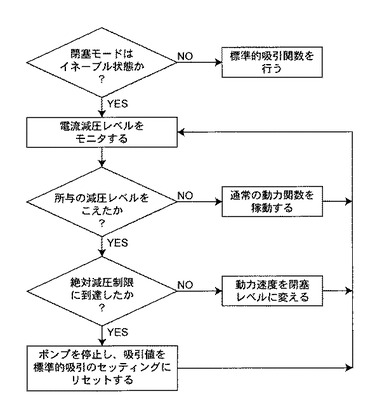
【図3】可変の吸引速度を伴う水晶体超音波吸引システムの閉塞−非閉塞モードの操作を示すフローチャートである。
【図4】可変の超音波動力レベルを伴う水晶体超音波吸引システムの閉塞−非閉塞モードの操作を示すフローチャートである。
【図5】水晶体超音波吸引システムの可変のデューティサイクルパルス関数の操作を示すフローチャートである。
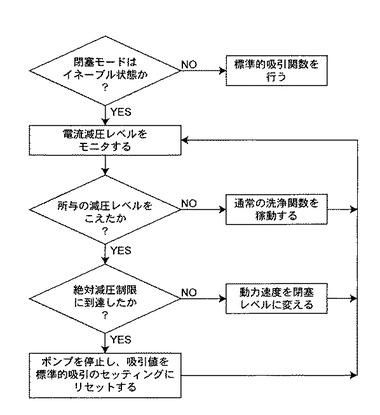
【図6】可変の洗浄速度を伴う水晶体超音波吸引システムの閉塞−非閉塞モードの操作を示すフローチャートである。
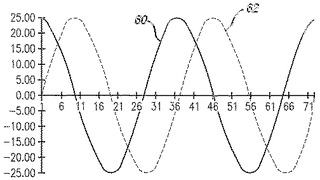
【図7】圧電性水晶体超音波吸引術ハンドピースに印加される電圧を示す正弦波と、結果として生じるハンドピース内への電流との間の90°の位相シフトのプロットである。
【図8】通常の圧電性水晶体超音波吸引術ハンドピースの位相関係とインピーダンスのプロットである。
【図9】本発明に係る方法を実施するのに適合的な改良された位相検出回路のブロック図である。
【図10】種々のハンドピース/針に対する周波数の関数としての位相の関係のプロットである。
【図11】位相角度を利用して最大位相モード操作でハンドピース/針パラメータを制御する位相制御水晶体超音波吸引システムの機能ブロック図である。
【図12】位相角度を利用して装荷(load)検出方法でハンドピース/針パラメータを制御する位相制御水晶体超音波吸引システムの機能ブロック制御図である。
【図13】パルス制御水晶体超音波吸引システムの機能ブロック制御図である。
【図14】ハンドピースを経由する動力レベルコントローラ及びコンピュータにより与えられる、パルスに対する種々の超音波エネルギパルス特性を示す。
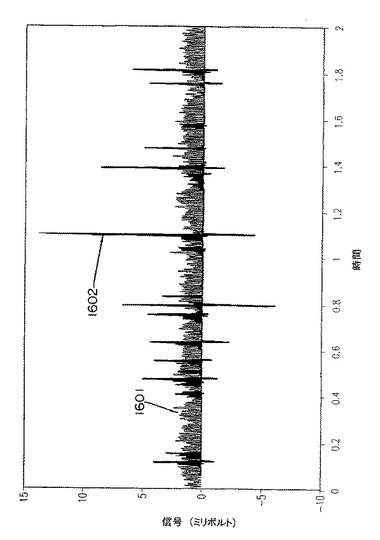
【図15】種々のレベルセッティングの下で流体内に連続してエネルギを加えるシステムに対する信号強度のプロットである。
【図16】種々のレベルセッティングの下で流体内に連続してエネルギを加えるシステムに対してプロットされる、ノイズ底値を除去しキャビテーションが偏位した後の信号強度を示す。
【図17】周期的動力印加セッティングを用いるシステムのパフォーマンスを示す。
【図18】連続的操作に対する信号強度を周期的動力印加と対比する。
【図19】連続操作信号強度と、周期的マイクロバーストエネルギ印加信号強度との間の、対比を示す。
【図20】種々のエネルギ印加セッティングにおける、時間に対する相対的キャビテーションエネルギを示す。
【図21】本発明に係る波形を示す。
【図22a】本発明に係る波形の別の例を示す。
【図22b】本発明に係る波形の別の例を示す。
【図22c】本発明に係る波形の別の例を示す。
【図22d】本発明に係る波形の別の例を示す。
【図22e】本発明に係る波形の別の例を示す。
【図22f】本発明に係る波形の別の例を示す。
【図23】本発明の拡張された超音波エネルギ波形の計算及び配布の概念ブロック図を示す。
【図24A】流れ、圧力、若しくは減圧状況での、波形の例を示す。
【図24B】流れ、圧力、若しくは減圧状況での、閉塞の存在若しくは他の感知された変化にて、与えられる波形の例を示す。
【発明を実施するための形態】
【0027】
[発明の詳細な説明]
[デバイス]
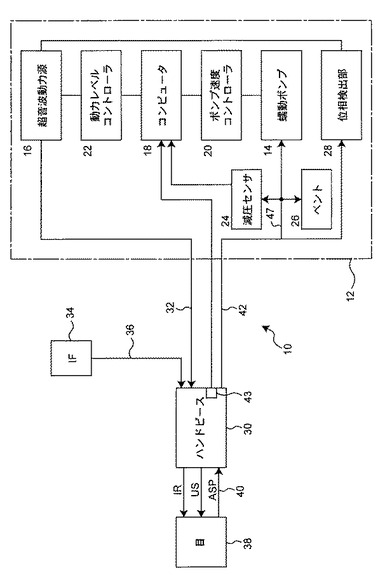
図1は、概略符号10により示される、ブロック図での水晶体超音波吸引システムを表す。該システムは図1にて点線で囲まれるコントロールユニット12を有し、該コントロールユニット12は、減圧源となる可変速度善導ポンプ14、パルス化された超音波動力源16、及び、ポンプ速度コントローラ20と超音波動力レベルコントローラ22とに制御出力を与えるマイクロプロセッサコンピュータ18を、含む。減圧センサ24は、コンピュータ18に入力を与え、該コンピュータ18は蠕動ポンプ14の入力側の減圧レベルを示す。適切な排出はベント26により為される。
【0028】
位相検出器28は、入力をコンピュータ8に与え、該コンピュータ8は、ハンドピース/針30に加えられる電圧を表す正弦波と、結果としてハンドピース30の中に流れる電流との間の位相シフトを表す。ハンドピース30のブロック部分は、針を超音波振動するための、針及び電気手段を、通常は圧電性水晶を、含む。コントロールユニット12は、水晶体超音波吸引術ハンドピース/針30にライン32で動力を供給する。洗浄流体源34は、ライン36を介してハンドピース/針30に流体接続する。洗浄流体及び超音波動力は、図面上でブロック38で示される、患者の目、即ち作用されるエリア若しくは領域にハンドピース/針30によって、加えられる。一方で、洗浄源は、ハンドピースから独立した分離路を介して眼38に経路付けられてもよい。眼38は、ライン/ハンドピース針40及びライン42を介してコントロールユニット蠕動ポンプ14により、吸引される。ハンドピース30上に配置されたスイッチ43は、医師/オペレータがハンドピースへの電気パルスの振幅を本明細書で説明するようにコンピュータ18、動力レベルコントローラ22及び超音波動力源16を介して選択する手段として、利用され得る。スイッチ43の代わりに、例えば、フットペダル(図示せず)などの適切な手段が利用されてもよい。
【0029】
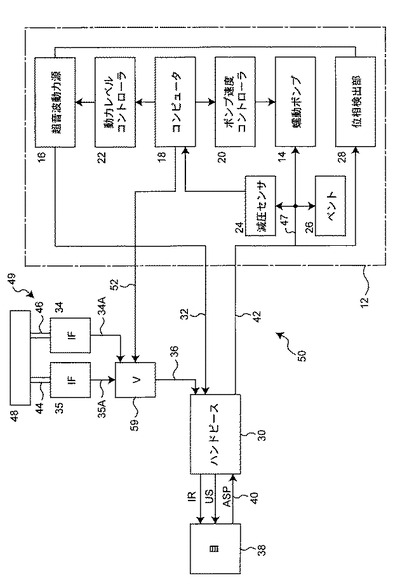
図2は、図1に示されるシステム10の要素の全てを組み込む別の水晶体超音波吸引システム50を示す。ここで同一の符号は図1に示す要素と同一である。洗浄流体源34に加えて、第2の洗浄流体源35が源34、35と共に設けられ、夫々ライン34a、35aを介してハンドピース/針30に入るライン56と、バルブ59とに、接続する。バルブ59は、ライン52を経由する動力レベルコントローラ22からの信号に応答して、ライン34A及び源34と、ライン35A及び源35とを、二者択一的にハンドピース/針30と繋ぐように機能する。
【0030】
図に示すように、洗浄流体源34、35は、ハンドピース/針30の上に種々の高さに配置され、容器35内の流体のヘッド部を容器34内の流体のヘッド部より大きくして、複数の圧力で洗浄流体をハンドピースに注入する手段を設ける。異なる長さのライン44、46を含むハーネス49は、支持部48に繋げられると、ハンドピース/針30の上部にて異なる高さに容器34,35を配置する手段となる。
【0031】
洗浄流体のために種々の高さで容器を利用することは、異なる圧力で洗浄流体を供給する手段であることを意味し、更に二者択一的に、独立ポンプに例えば独立循環ループ(図示せず)が設けられてもよい。そのような容器及びポンプは、動力コントローラ22からの命令で、ハンドピース/針30に洗浄流体を不連続の圧力で供給できる。
【0032】
[操作]
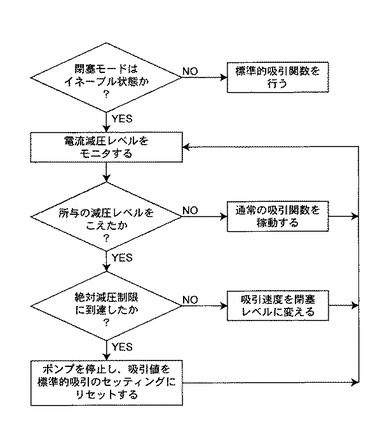
コンピュータ18は、前述の減圧センサ24からの信号によって、蠕動ポンプ14へのインプットライン47内に減圧レベルをプリセットするように応答する。ハンドピース30の閉塞−非閉塞状況に対応するコントロールユニット内の操作は、図3の流れ図に示される。図3に示すように、ハンドピース吸引ラインが閉塞していれば、減圧センサ24に感知される減圧レベルは増加し得る。コンピュータ18は、吸引速度、減圧レベル及び超音波動力レベルに対するオペレータ設定可能リミットを設け得る。図3に示されるように、減圧センサ24の感知する減圧レベルがハンドピース吸引ライン40の閉塞の結果として所定の値に達すると、コンピュータ18はポンプ速度コントロータ20に信号を与え蠕動ポンプ14の速度を変更し、このとこにより吸引速度を変更する。ハンドピース/針30を閉塞する部材の特徴に依存して、蠕動ポンプ14の速度は増加もし得るし減少もし得る。閉塞する部材が壊れると、減圧センサ24は減圧レベルでの低下を示し、コンピュータ18に蠕動ポンプ14の速度を非閉塞時の操作速度に変更させる。
【0033】
蠕動ポンプ14の速度を変更することにより吸引速度の水晶体超音波吸引パラメータを変更することに加えて、超音波動力源16の動力レベルがハンドピース30の閉塞若しくは非閉塞状況の関数として変動し得る。図4は、コンピュータ10と動力レベルコントローラ22を用いる超音波動力源動力レベルの制御の基本フォームを、流れ図フォームで示す。図4の流れ図は図3の流れ図に対応するが、超音波動力レベルの水晶体超音波吸引パラメータを変動する。
【0034】
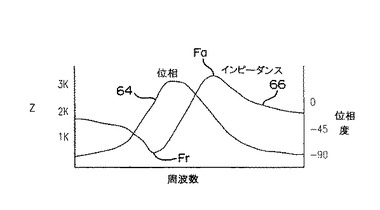
通常の水晶体超音波吸引術ハンドピースのインピーダンスは、周波数と共に変動するのであり、換言すればハンドピースは反応性のものである。周波数の関数としての通常のハンドピース位相とインピーダンスとの依存性は、図8に示される。図8では、曲線64は周波数の関数としてハンドピースの電流と電圧の間の位相差を示し、曲線66は周波数の関数としてハンドピースのインピーダンスの変化を示す。インピーダンスは、約25kHz〜約50kHzの範囲などの、通常の範囲の周波数に対して、“Fr”で低いものを“Fa”で高いものを示す。
【0035】
ハンドピースの自動チューニングは、ハンドピース電気信号をモニタすること、及び選択されたパラメータとの一貫性を維持するように周波数を調整することを要求する。水晶体超音波吸引術ハンドピースの先端にて生じる装荷を補償するために、ハンドピースへの駆動電圧が増加され、一方装荷が検出されて減少され、そして装荷が除去される。この位相検出器は、このタイプのシステムでは通常コントローラの一部である。このような従来の位相検出器では、通常のアウトプットは、電圧と電流波形の配列の差異、例えば、図7に示すような−90°に比例する電圧である。図8に示すように、ハンドピースを利用する場合、波形は位相で変動し、これに対応してアウトプット波形も変動する。
【0036】
従前、電気位相を計測する標準技術は、位相、及び周波数に比例する電圧を読み取ることである。このタイプの回路は、単一周波数で、利用に対して較正され得る。周波数を変更すると較正データが適当なものでなくなる。単一周波数システムでも見られるように、訂正された位相値は回路パラメータの変動のためにドリフトする。
【0037】
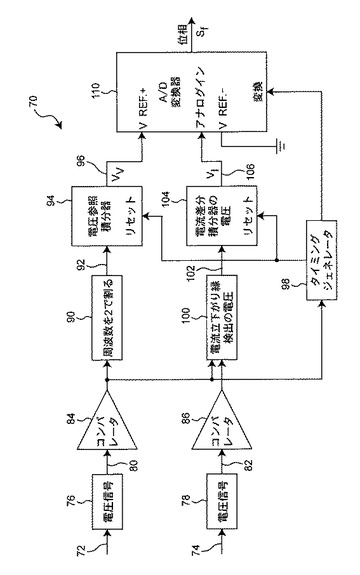
一つの他の利用可能な形態では、位相検出器アウトプットの値を周波数検出器の値と比較して真の位相を計算するマイクロプロセッサを利用する。この形態はかなり複雑であり、分解能の限界だけでなく個別の回路のドリフトに従属する。図9に示されるブロック図は、発明に関して実施するのが適切な改良された位相検出器を表す。図示される機能ブロックの各々は、従来の公知の通常の発明の回路と、以下に説明するように個々のブロックにより表される機能を生成するための部品を含む。
【0038】
システムは、水晶体超音波吸引術ハンドピースへの電圧信号の減衰器76、電流感知抵抗78、及びハンドピース30電流に対する固定ゲイン増幅器を用いて、水晶体超音波吸引術ハンドピース30からの電圧インプット72と電流74を適切な信号に変換する。その後、システムは、交流電圧信号80と交流電流信号82を、水晶体超音波吸引術電圧を表すアナログを論理レベルクロック信号に変換するコンパレータ84、86に送る。
【0039】
システムは、コンパレータ84からのアウトプットを、周波数を2で割るように構成されたDフリップフロップ集積回路90の中に供給する。続いてシステムは、集積回路90のアウトプット92を積分器として構成されたオペアンプ94の中に供給する。積分器94のアウトプット96は、最終の振幅がハンドピース周波数に逆比例する鋸歯波形である。タイミングジェネレータ98は電圧信号に同期するクロックを利用しA/Dコンバータタイミングを、更には個々のサイクルの終わりに積分器をリセットするタイミングを生成する。システムは、この信号を、ライン96を介してA/Dコンバータの電圧参照の中に供給する。
【0040】
電流立下がり縁に対する電圧立上がり縁検出器100は、Dフリップフロップ集積回路を利用し、ハンドピース電圧信号の立上がり縁を分離する。この信号は、ハンドピース30の電圧とハンドピース30の電流との間のタイミングプロセスを開始する開始信号として利用される。電流立下がり縁に対する電圧立上がり縁検出器100のアウトプット102は、ハンドピース30電圧波形の立上がり縁とハンドピース電流波形の立下がり縁の発生における時間差異に比例するパルスである。
【0041】
システムは、電流立下がり縁に対する電圧立上がり縁検出器100からの、ハンドピース位相信号102のためのもう一つの積分器104を用いる。積分器回路104のアウトプット106は、ピーク振幅が、水晶体超音波吸引術電圧波形の立上がり縁の開始とハンドピース電流波形の開始の立下がり縁における時間差異に比例する、鋸歯波形である。システムは、積分器回路104のアウトプット106を、アナログインプット、即ちA/D(アナログ−デジタルコンバータ)集積回路110の中に供給する。A/Dコンバータ110への正参照インプット96は、操作周波数に逆比例する電圧である。位相電圧信号96は、電圧開始の立ち上がり縁と、電流開始の立ち下がり縁との間の位相差に比例し、また、操作周波数に逆比例する。この構成では、電圧参照96と位相電圧106の2つの信号周波数は、周波数の範囲にわたって互いに跡を追い、このことにより、A/Dコンバータ110のアウトプットは操作周波数から独立した位相を生成する。
【0042】
この構成では、システムコンピュータ(図1及び図2参照)には、0〜255カウントが位相の0〜359°を一貫して表すリアルタイムデジタル位相信号が与えられる。較正のフォームは不必要である。利用される周波数にかかわらず計測に一貫性があるからである。例えば、38kHzと47kHzの操作周波数のAMP、150×105V/秒の立ち上がり時間を有する積分器、及び256カウントを有する8ビットA/Dコンバータを用いると、一定比率が維持され周波数の変動が結果に影響を与えない。このことは以下の例で示す。
【0043】
[例1]
[38kHz操作]
1クロック周期期間=1/F@38kHz=26.32×10−6秒
Iに対する1期間の部位=90°=26.32×10−6秒
4で割る=6.59×10−6秒
1参照周期に対する積分器アウトプット=(150×103V/秒)×(26.32×10−6秒)=3.95ボルト
90°周期期間からの積分器アウトプット=(150×103V/秒)×(6.59×10−6秒)=0.988ボルト
A/Dコンバータからの結果としての数値カウント=3.95ボルト/256カウント=0.0154ボルト/カウント
38kHzでの90°に対するA/Dカウントの実際の数=0.988/0.0154=64カウント
【0044】
[例2]
[47kHz動作]
1クロック周期期間=1/F@47kHz=21.28×10−6秒
Iに対する1期間の部位=90°=21.28×10−6秒
4で割る=5.32×10−6秒
1参照周期に対する積分器アウトプット=(150×103V/秒)×(21.28×10−6秒)=3.19ボルト
90°周期期間からの積分器アウトプット=(150×103V/秒)×(5.32×10−6秒)=0.798ボルト
A/Dコンバータからの結果としての数値カウント=3.19ボルト/256カウント=0.0124ボルト/カウント
47kHzでの90°に対するA/Dカウントの実際の数=0.798/0.0124=64カウント
【0045】
このことは、本システムの基線操作を、即ち水晶体超音波吸引術ハンドピースを略認容できるレベルに調整できることを、示す。
【0046】
[エネルギ配布]
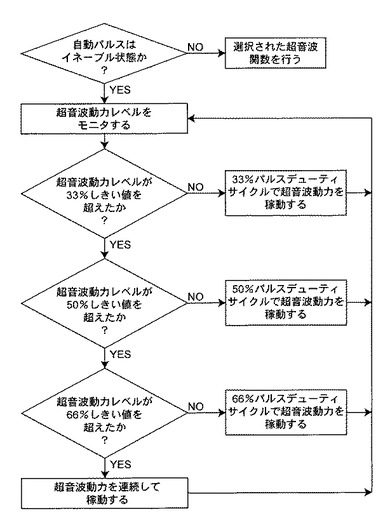
以下の節は概略、一般的に水晶体超音波吸引処置を実効的に実施するために採用されるマイクロバーストエネルギの配布のタイプに、概略関連する。図5を参照して、選択された動力レベルの関数として変動するパルスデューティ周期を生成するための超音波動力源の基本的コントロールを示す流れ図を示す。個々の動力パルスは20ミリ秒より短い期間を有してもよい。図5に示すように、かつ例示に過ぎないが、33%パルスデューティ周期は、動力レベルが所与の閾値を超えるまで動作するのであり、この場合は33%である。その時点では、超音波動力レベルが50%の閾値を超えるまではパルスデューティ周期は50%まで増加することになり、更にこの時点ではパルスデューティ周期は66%まで増加する。超音波動力レベルが66%の閾値を超えると、動力源が連続して稼動する、即ち、100%のデューティ周期となる。33、50及び60のパーセントが図5に示されているが、種々のデューティ周期シフト点を定義するために、種々のデューティ周期に加えて他のパーセントレベルが選択されてもよい、ということは理解されるべきことである。この構成でのパルス期間は20ミリ秒以下であればよい。本明細書で説明する追跡メカニズムを伴うこのような制御により、20ミリ秒以下の期間でエネルギのバーストが可能になる。
【0047】
図13を参照して、20ミリ秒以下の速いパルス期間に、運動エネルギ又は機械エネルギで組織を十分切除できるようなエネルギが与えられる。超音波エネルギパルスは、次のパルスが活性化する前に結果として熱レベルを大きく下げるために十分長く、停止されてもよい。医師/オペレータは、選択されたパルス振幅、洗浄及び吸引流体流速に呼応してスイッチ143及びコントロールユニット22を介して線形状にパルス振幅を変動させ、パルスデューティ周期を制御できる。上述のように、オフデューティ期間若しくは周期は、後続のパルスが活性化する前に確実に熱散逸するように、設定される。このように、増加した振幅は、先端加速度を増加し、これにより組織損傷する熱生成に対し熱散逸を増大する。即ち、医師/オペレータは、組織密度を介して切除するのに必要な正しい加速度を選択する線形動力コントロールを用いることができる。ここでコントロールユニットは、組織が熱から代償不全になることを回避するために、20ミリ秒以下のパルス幅と“オフタイム”において対応する変動を為すものである。コントロールユニットは、選択された水晶体超音波吸引術ハンドピース(全体ワット数)若しくは水晶体超音波吸引の先端(大きさ、重量)に依存するように、プログラムされる。このように速いパルスを利用することは、レーザが非常に短い期間のパルスで稼動するのと同様である。この構成でのパルスは、秒あたり約25パルス〜2000パルスの間の反復率を有し得る。
【0048】
図5を参照して、ハンドピース吸引ライン38が閉塞されると、減圧センサ24により感知される減圧レベルは増加する。コンピュータ18は、制御のためのオペレータが設定可能な限界を有する。洗浄流体供給部32、33の限界はハンドピース30に繋がるものである。2つの洗浄流体源、即ち容器32、33が示されているが、容器はいくつ用いられてもよい。
【0049】
図6に示すように、減圧センサ24による減圧レベルが所与のレベルに達すると、吸引ハンドピースライン38の閉塞の結果として、コンピュータはバルブ38を制御し、バルブに容器34、35の各々とハンドピース/針30との間の流体の連絡を制御せしめる。
【0050】
上述のようなハンドピース/針30を閉塞する部材の特性、及び内科医の要求と技術に依存して、ハンドピースにより与えられる洗浄流体の圧力は増加若しくは減少し得る。閉塞された部材がきれいにされると、減圧センサ24は減圧レベルで低下を示し、バルブ38に容器34、35を非閉塞レベルの圧力に切り換えせしめる。
【0051】
3つの容器(図示せず)などの一つ以上の容器が利用され、容器システムに関して上述したように、バルブは相互接続してその3つの容器のどれかからの洗浄流体を選択する。
【0052】
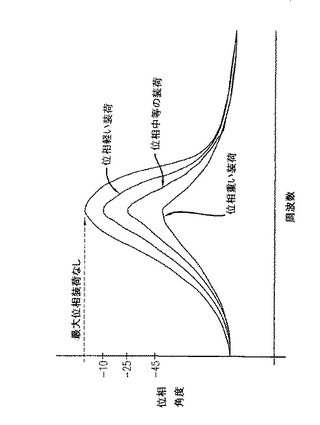
減圧の関数として水晶体超音波吸引術ハンドピース/針30のパラメータを変更することに加えて、ハンドピースの閉塞又は非閉塞状況は、位相曲線の位相シフト若しくは形状における変化によってハンドピース/針により感知される装荷の変化に基づいて決定され得る。種々のハンドピース30装荷、装荷無し(最大位相)、軽い装荷、中等の装荷及び重い装荷に対して、周波数の関数としての複数の位相角度が図10に示される。
【0053】
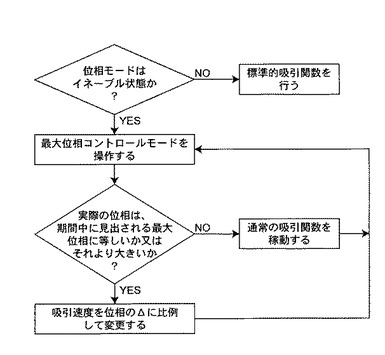
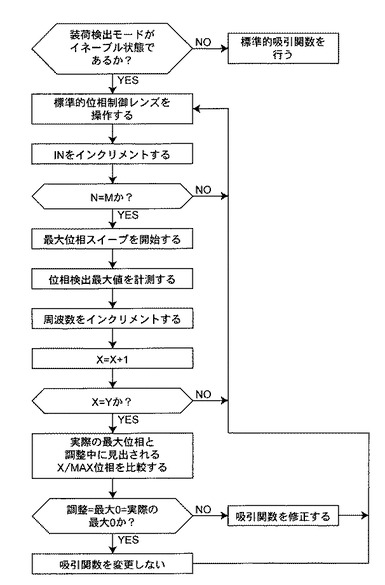
図11を参照すると、最大位相モード操作を表しており、実際の位相が決定され最大位相と比較される。実際の位相が最大位相に等しい若しくはそれより大きいならば、通常の吸引関数が稼動する。実際の位相が最大位相より小さいならば、吸引速度が変更され、変更は位相変化に比例することになる。図12は、装荷(図10参照)検出が操作の中に組み込まれる最大装荷以下における操作を表す。
【0054】
最大位相モード操作を表す、図11に示されるように、ハンドピース吸引が閉塞されると、位相検出部センサ28により感知される位相は減少する(図10参照)。コンピュータ18は、吸引速度、減圧レベル及び超音波動力レベルに対してオペレータ設定可能限定を有する。図11に示すように、ハンドピース吸引ライン40の閉塞の結果として位相検出部28により感知される位相が所与のレベルに到達すると、コンピュータ18は、ポンプ速度コントローラ20に対し蠕動ポンプ14の速度の変更を支持し、これにより吸引速度が変更される。
【0055】
ハンドピース/針30を閉塞する部材の特徴に依存して、蠕動ポンプ14の速度は増加し得る、若しくは減少し得る。閉塞部材が粉砕されると、位相検出部28は位相角度の増加を示し、コンピュータ18に蠕動ポンプ14の速度を非閉塞動作速度に変更せしめる。
【0056】
蠕動ポンプ14の速度を変化することにより吸引速度の水晶体超音波吸引術パラメータを変更することに加えて、超音波動力源16の動力レベル及び/又はデューティ周期は上述のようにハンドピース30の閉塞又は非閉塞の状況の関数として変動され得る。
【0057】
[マイクロバースト拡張操作]
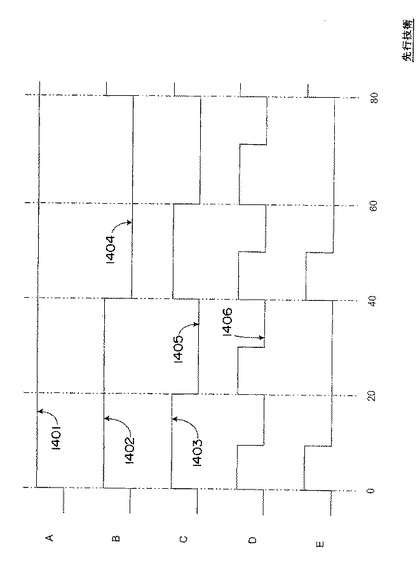
従前の操作のための種々のパルス特性が図14に示される。図14から、パルスの操作は、プロットAに示すように約25kHz〜約50kHzの周波数の動力の一定の印加でもよく、プロットBに示すように40ミリ秒のオンの期間と40ミリ秒のオフの期間との80ミリ秒毎に一度のもの、即ち、毎秒12.5パルスを示すものであってもよい。一方で、超音波動力供給は、プロットCに示すように20ミリ秒のオンと20ミリ秒のオフからなる40ミリ秒に一度発生するものであってもよい。プロットDは、10ミリ秒のオンと10ミリ秒のオフからなる20ミリ秒毎に加えられる動力を示す。プロットEに示すような他の非周期的な構成が採用されてもよく、それは40ミリ秒毎に周期的に10ミリ秒動力の印加があり、30ミリ秒のオフがあるようなものである。
【0058】
一周期の間一定の動力レベルで超音波動力がハンドピース及び針に印加されるときには、これらの動力の印加にインタバルは連続した一定の期間を表す。更に、図において動力が連続したDCタイプの印加で加えられるように見える場合、図は、約25kHz〜50kHzの周波数で圧電性水晶に印加されるシヌソイド波形を含む動力の実際の印加を示すことが意図されている。従って動力の印加は真実には“一定”ではない。この150ミリ秒の期間の動力の印加は、25kHz〜50kHzのシヌソイドの一定の印加として定義される。
【0059】
[キャビテーション]
本発明は、キャビテーションの有益な効果を利用しこれに従ってエネルギを印加することによって、図14の波形の拡張を示す。外科環境におけるキャビテーションは、塩水、水、若しくは他の利用可能流体などの流体内の瞬間の泡の激しい崩壊として定義され得る。キャビテーションは、細胞及び核が水晶体超音波吸引術を含む超音波外科システムで壊され切除される初歩的手段である。上記システムは、水晶体超音波吸引術ハンドピース30の先端から発出する音波圧力場を形成する一連の音波圧力波を与えることにより、キャビテーションを生成し得る。音波圧力波は、約38kHzの周波数などの、操作周波数でのレンズ先端の前後方の振動の結果である。
【0060】
キャビテーションは操作流体での瞬間の泡の生成、振動及び崩壊である。水晶体超音波吸引術若しくは他の外科的シナリオでは、外科的超音波先端から発出する音波により泡が形成され、従って泡は音波キャビテーションと呼ばれることがある。これら泡の激しい崩壊は、核を破壊し若しくは組織の破砕・チョップの特性を生成する力の多くを形成し得る。以下に示す共鳴振動などの、圧力場の影響の下での他の泡の動作も、望ましい生物学的な効果を生成し得る。
【0061】
この超音波状況で、音波圧力は音波源強度Qs若しくは先端の体積速度に比例する。ここで、体積速度は有効先端領域A(通常は環形)に先端速度を掛けたものである。先端速度は、操作周波数の掛けられた先端振動振幅δと2πとの積である。先端は、流体内の音波波長と比べて相対的に小さく、操作周波数で音若しくは単極源のポイントラジエータとして作用する。
【0062】
この状況では、低周波数音は、先端からの距離とは逆に低くなる圧力レベルを伴って、球形状に放射する傾向がある。周波数ω*(2πf)で搏動する単極源から距離rでの圧力場は以下の数1で与えられる。
【0063】
【数1】

ここで、ρ0とcは媒体の密度と音速であり、kは波数、即ちω/cであり、Qsは源強度である。数1を利用して、圧力は以下の数2で表される。
【0064】
【数2】
数2から、圧力は先端領域、行程体積、及び操作周波数の2乗に関連する。数2は種々のサイズの先端、周波数、及び行程体積の間の圧力等価を決定する一般的ガイドラインを与える。
【0065】
音波源強度Qsは以下のように計算される。連続した環状の平坦な端部先端が、24500Hzで動作し、半径は1.44mm、振動振幅100μm(先端偏位200μm)であると仮定する。
[数3]
Qs=Area*velocity
=(πr2)*ω*δ
=π*(0.00144)2*(2*π*24500)*(100*10−6)
Qs=100×10−6m/秒
【0066】
この例での全体の音波動力Wは、以下のように計算される。
[数4]
W=ρ0×c×k2×(Qs)/8π
ここで
[数5]
k=ω/c
=(2*π*f)/c
=2*π*24500/1500〜=100
W=1000*1500*1002*(10*10−6)2/8π
〜=6音波ワット
【0067】
音は水、塩水又は他の液体などの流体を通るので、音は微細な泡に出会うことになる。波の“引っ張り”部分や“希薄”部分や“陰性”部分に曝された泡は、拡張する傾向を有する。“圧縮”部位や“陽性”部位に曝された泡は、サイズを縮小する即ち僅かに縮む傾向がある。力の差異により拡張された状態にあるとき気体は散乱して泡になる。泡がサイズを縮小すると、気体は消散する、即ち拡散する傾向がある。縮小した泡の表面積は拡張した泡の表面積より小さいので、周期の“拡張”部位の間よりも、周期のこの部位の間の方がより少ない気体が散乱する傾向がある。繰り返して泡はサイズを増加する傾向があり、矯正散乱として知られる現象である。圧力変動が重大でないならば、拡張状態と縮小状態の間のサイズの差異は、適切な正味の気体流入を起こすのには重大ではない。
【0068】
泡は矯正散乱によりサイズを大きくする際、これらの泡は、気圧、表面張力などの泡への流体力学的力が、印加される音場と力学的平衡、若しくは共鳴を達成するようなサイズを獲得し得る。力学的平衡の状況で、泡は勢いよく振動し、崩壊し破壊しうる。圧力が重大であるとき、泡のこの振動及び崩壊が発生する。圧力が矯正散乱を生成するのに十分な大きさである場合、小さい泡は継続してサイズを増大し、振動して崩壊する傾向がある。泡は完全な崩壊なくても分割し、その結果より小さい泡になってサイズを増加し処理を計継続する。この現象は安定キャビテーションと称されることがある。
【0069】
安定キャビテーションは、圧力場が存在する限り比較的安定して動作する傾向がある泡の堆積若しくは雲を生成する。安定キャビテーションでは、多数の泡が、完全な激しい崩壊無くばらばらになる。安定キャビテーションを促進することは、細胞及び核切除に適合的でないことがある。
【0070】
一時的キャビテーションは、激しい泡崩壊として定義され得る。泡が細胞壁などの境界で激しく崩壊するとき、泡は細胞壁で大量の圧力を消費する。小領域内部で非常に高い圧力及び温度を生成する水撃にも、効果は同様である。これらの高圧力/高温度の状況は、組織を破壊し細胞内の蛋白質を変性させることがある。一時的キャビテーションは、音波駆動周波数に応じて非常に特定のサイズの泡の素早い拡張と激しい崩壊から生じる。この素早い拡張と激しい崩壊は、駆動波形の力から生じる。一時的キャビテーションはある閾値レベル以下では全く発生し得ないという点において、一時的キャビテーションは、駆動波形圧力レベルに敏感である。閾値以上では、正確なサイズの泡が利用可能である限り、一時的キャビテーションが発生する。
【0071】
キャビテーション現象のための絶対閾値は一般的に周波数に依存する。キャビテーションを生成する際、本明細書に記載する構成は、駆動の低周波数超音波波形からのエネルギを、機械的に取り扱える泡に変換する。レンズ先端から発出する駆動波形は、ポンピング波と称されてもよい。より多くのキャビテーションが発生する際、より多くのエネルギがポンピング波から受けられる。キャビテーションのための閾値を下回るような、低い圧力レベルでは、先端から発せられる低周波数圧力は先端偏位に概ね比例する。この低圧力のシナリオでは、細胞壁若しくは核に衝撃を与える圧力はほとんど無い。レンズ先端が振動し摩擦熱を発生できるならば、機械的な衝撃が生じうる。駆動偏位レベルが増加すればキャビテーションの活動が増加する傾向がある。更に駆動振幅が増加すると、最早振幅を追跡し得ない放射低周波数圧力となってしまう。圧力と振幅の間のこの非相関関係は、エネルギがキャビテーションへ移動することの結果として発生する。駆動振幅が更に増大すると、低周波数圧力場が減少し得る。そのような圧力場での減少は、先端を覆い、圧力場を保護するクッションとして作用する泡の、結果である。従って、キャビテーションエネルギに対するポンピングエネルギの比率は、駆動振幅が増大するにつれて変動する。
【0072】
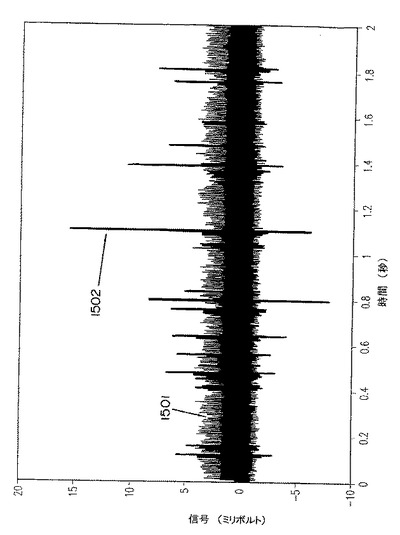
図15は、エネルギの一定レベルを印加する、即ち、2.0秒などの期間に動力を連続的に印加するシステムに対して、流体に加えられた結果としてのエネルギを示す。複数の高い振幅スパイクを有する信号1502は、低い動力セッティングを有するものであり、一方で、より低く変動の多い特性を有する信号1501は、より高い動力セッティングを有する。低動力信号1502は比較的大きい信号偏位を示し、一時的キャビテーションを示す。一時的なピークの間では、低動力信号1502に対する信号レベルは、概ねノイズ床である。より変動が多くより高い動力信号1501は、より低いピークレベルを示すがノイズ床より上の連続信号を示し、安定キャビテーションを示す。
【0073】
図15のシステムに対してキャビテーション偏位のノイズ床及び区画を除去すると、図16になる。2つの波形の高動力信号1601と低動力信号1602は、図示される期間において殆ど同一の全体キャビテーションエネルギを示す。従って、一時的キャビテーションがより小さい周波数で発生するなら、一時的キャビテーションは領域若しくは環境により大きいエネルギを解放する傾向がある。
【0074】
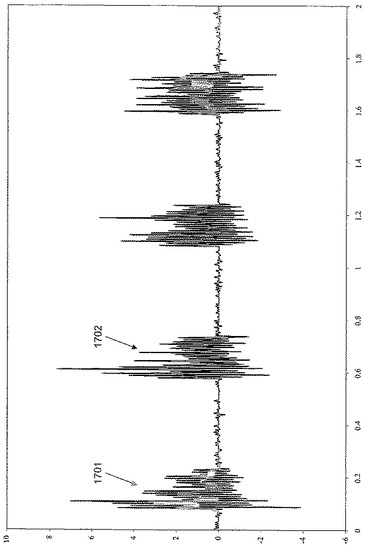
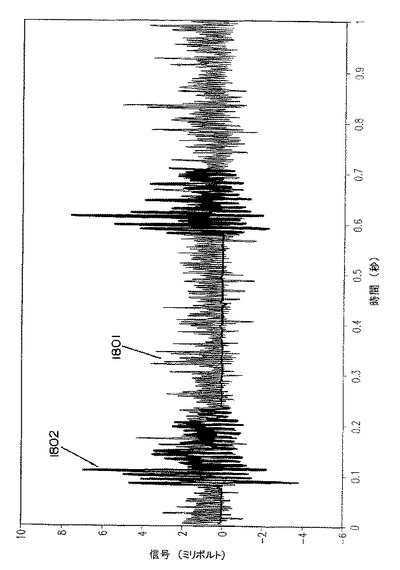
図17は、約0.15ミリ秒のオンがあり約0.35ミリ秒のオフが続くというように、動力がより短いバーストで加えられるシステムのレスポンスを示す。図17のプロットはノイズ閾値操作の後のパフォーマンスを示す。第1の2つのバースト1701、1702は重要な一時的キャビテーションで始まるが、この一時的キャビテーションは比較的速く衰える傾向がある。図18は、連続する動力の印加と比べて、0.15ミリ秒のオンがあり約0.35ミリ秒のオフが続くこの長いパルスを示す。長いパルス信号1802と連続する信号1801は、期間全体に渡り同様の全体キャビテーションエネルギを有するが、パルス応答1802は駆動動力の約半分以下を用いる。このより低い駆動動力は、約半分よりも短い時間に対してエネルギを加えられるシステムが原因である。
【0075】
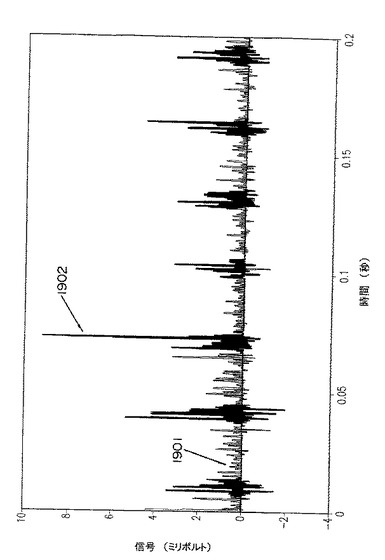
図19は、周囲への連続する動力の印加1901と、より短いバースト構成1902を示す。このより短いバースト期間1902は、0.2秒の全体期間に6ミリ秒のエネルギの印加と24ミリ秒の休止を繰り返すような、一連のバーストを示し、その後0.5秒間のゼロ動力のような、僅少な動力を印加する。図19は、このより短いバースト期間1902の駆動周波数エネルギの殆どあらゆるバーストは一時的キャビテーションを生成する傾向があることを示す。バースト間の時間は、流体が十分なサイズの泡、即ち溶解した気体で領域を充たすように十分に動き、再び一時的キャビテーションを受容する状況を生成し得る、と考えられる。
【0076】
本システムでは、短い持続期間のエネルギ供給の存在でのパフォーマンスの観察を基にすると、キャビテーションは図20に示すようなエネルギ供給に関連する。図20は、水晶体超音波吸引術環境における種々のエネルギ印加と、その結果として生じるキャビテーションエネルギを示す。図20から、2乃至3ミリ秒が、キャビテーションエネルギが最大値に立ち上がるのに通常要求される。2乃至3ミリ秒は、レンズ先端が要求される完全な偏位に到達し、キャビテーションプロセス、特に一時的キャビテーションが開始するのに、要求される時間を示す。開始すると、供給されるエネルギは衰える傾向にあり、一時的キャビテーションから安定キャビテーションへの移行を示す。6ミリ秒後、ハンドピースはエネルギ減衰し、先端の残余の“共鳴”のみがキャビテーションを生成する。
【0077】
図20の点線は、図15、図16、図18及び図19に示される、連続印加されるエネルギの存在から読み取られたエネルギ読み取りを示す。図20から、キャビテーションエネルギレベルは連続モードでは非常に低くなる。
【0078】
[変調エネルギ供給]
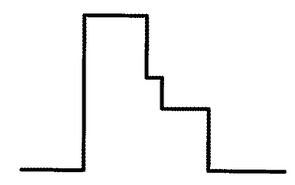
本発明は、以下のように安定キャビテーション及び一時的キャビテーションを利用する。動力は短いパルスで加えられるが、これらの短いパルスは上述のレンズ環境に対する分割されたエネルギレベルを有する。特に、図21に示すような波形が用いられ得る。他の類似の波形が利用されてもよく、それらはレンズ状況、先端サイズ、操作周波数、流体状況及び閉塞状況などの遭遇する状況に依存することになる。但し、それらに限定されるものではない。図21は、2ミリ秒などの短い持続期間の30ワットの初期エネルギ期間2101による、初期動力を供給する変調されたパルスを示す。30ワットはハンドピースへのインプットを示す。第2の期間2102は、2ミリ秒の期間に15ワットで供給される動力を示す。第3の期間2103は、この例では3ミリ秒間の、10ワットなどの特定レベルで供給される期間を示す。変調された即ち段階化された動力供給構成の目的は、できだけ速く一時的キャビテーションを生成するのに必要な距離より大きく針ストロークを初期化することである。一時的キャビテーションを誘導するのに要求される動力閾値に達すると、動力はパルスの残余の間弱められてもよい。
【0079】
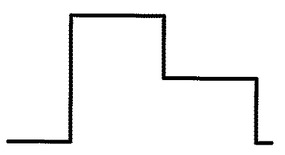
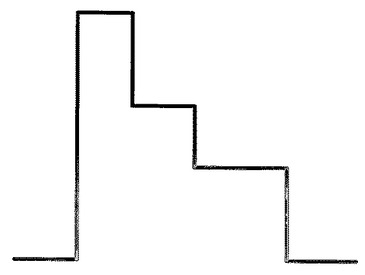
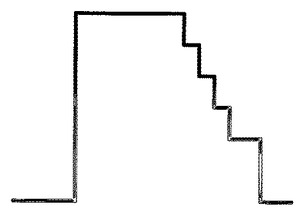
当業者に理解されるように、他のタイミング及び動力実装が用いられてもよい。動力スキームの例が図22a−fに示され、ここでは動力レベル及びタイミングが様々である。時間及び動力を変動させる目的は、大きな熱を生成せずに与えられた状況でできるだけ速く一時的キャビテーションを達成することである。図22aは、2ミリ秒の30ワットの変調パルスと4ミリ秒の15ワットの変調パルスとの、2つのステップを示す。図22bは、2.5ミリ秒の35ワットパルス、続いて1ミリ秒の25ワットパルス、続いて1ミリ秒の15ワットパルス、続いて1ミリ秒の5ワットパルスを示す。図22cは、2ミリ秒の25ワットパルス、0.5ミリ秒の15ワットパルス、2.5ミリ秒の10ワットパルスを示す。図22dは、3ミリ秒の20ワットパルス、3ミリ秒の10ワットパルスを示す。図22eは、1.8ミリ秒の40ワットパルス、2ミリ秒の25ワットパルス、3ミリ秒の15ワットパルスを示す。図22fは、3.5ミリ秒の30ワットパルス、0.5ミリ秒の25ワットパルス、0.5ミリ秒の20ワットパルス、0.5ミリ秒の15ワットパルス、及び1ミリ秒の10ワットパルスを示す。当業者には理解されるように、状況によって他の時間や期間が選択されてもよい。
【0080】
図22a−fは、所定の時間でオンオフする完全な矩形波を示すが、波が矩形であることが必須であることは全くない。図22g−iは本発明の別の形態をしめし、ここでは丸められた波、即ち漸化動力供給曲線が手術領域に印加される。図22g−iに示すように、また、当業者には理解されるように、通常初期により高いエネルギのサージ若しくはバーストを供給し、その初期のサージからエネルギをドロップオフさせることにより、現存する状況に基づいて十分な動力が供給されて一時的キャビテーションを誘導する。初期のエネルギサージの大きさ及び時間は、現存の状況に依存するのであり、通常の水晶体超音波吸引手術状況に対しては20に示されるのと同様な曲線に類似する、又は全体若しくは一部基づく特性を示してもよい。
【0081】
本発明の重要なファクタは、状況内に比較的短い時間での一時的キャビテーションを与え、領域内に供給されるエネルギを最小化することを試みるエネルギの許容可能な下落を続かせることである。従って、少なくとも一つのより低い動力のパルスが間もなくその後に、又は即座にその後に続く強い若しくは高いエネルギ初期パルスは、前述の所望のパフォーマンスを達成するための重要な変調動力供給方法である。
【0082】
本明細書で議論される状況では、超音波エネルギの印加は、加えられる超音波エネルギの下落が後に続く短期持続期間に加えられる強い若しくは高いエネルギの短いパルスとして、特徴付けられる。そのような波形は図22a〜図22iに示される波形を含むが、それに限定されるものではない。図20に示されるキャビテーションエネルギは、動力の印加に関連するが、実際には超音波エネルギ期間ではない期間に発生してもよい。例えば、以下は限定ではないが、超音波エネルギが概略3ミリ秒印加され、これらの3ミリ秒間でピークに到達し、一方結果としてキャビテーションエネルギが、6ミリ秒時点などの後の時点でピークに到達してもよい。より長い若しくはより短い期間が採用され、及び/又は観察されてもよく、種々の期間の有効性はそれら期間が採用される状況に依存する。
【0083】
前述の事柄より、アウトプット状況に依存して、一時的若しくは安定キャビテーションが超音波デバイスによって種々の条件で生成されてもよい。このキャビテーションは、開示されたものに加えて種々の状況で利用され得、それら状況は化学的処理状況を含む(但し限定ではない)。キャビテーションは、医学的処置にて若しくは医学的処置を高めるためにも、採用され得る。例えば、医学的処置の強化は、例えば、医学的処置を助力すること、若しくは促進することを含む。化学的処理に関して、既述するようにエネルギを印加することが、超音波エネルギの伝達から生じる熱を最小化する傾向を有し、更に所与の化学的結果を実現するのに要求されるインプットエネルギを最小化する傾向があってもよい。
【0084】
一時的キャビテーションは、レンズ状況で有効に発生するために、ある特定の条件を要求する傾向があり、それら条件は(限定ではないが)流体内の適切なサイズの初期の泡及び/又は溶解気体の利用を含む。適切なサイズの泡及び/又は溶融気体が利用可能でなければ、低い流れのために、若しくは連続する動力印加モードでの高いアウトプットレベルの存在により、一時的キャビテーションは安定キャビテーションに転移する傾向がある。一時的キャビテーションに存するエネルギは安定キャビテーションのものよりも高くなる傾向がある。一定エネルギに対抗するパルスエネルギは、流体を適正なサイズの泡に補給し一時的キャビテーションを促進し、組織への熱損傷を生じる見込みもより少なくしてより少ない全体動力を消費し供給するに過ぎないというような、利点が備わる。更に、パルスエネルギ供給モードの存するキャビテーションは、本明細書に記載するレンズシステムに対して、最大値に達するのに概略2〜3ミリ秒を求める。キャビテーションは、一時的キャビテーションが安定キャビテーションに転移するにつれて減少し始める。
【0085】
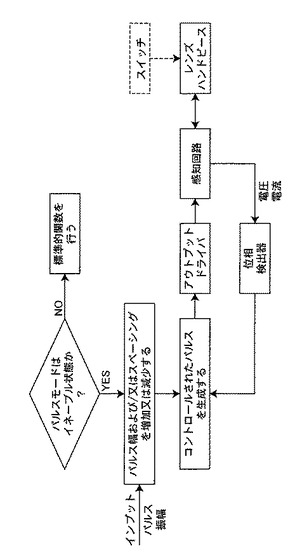
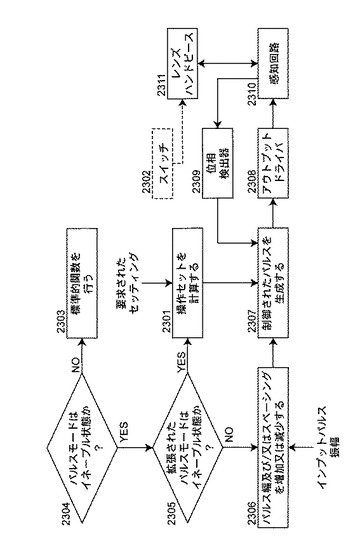
本明細書で記述するエネルギのパルスは、本議論に関連してプログラミングされた際にソフトウエア、ハードウエア、ファームウエア、若しくはそれらの組み合わせにより、又は、当業者に公知のデバイス若しくは装置を用いて、実施されてもよい。ソフトウエアで実装され得る本発明の操作のサンプルのブロック図は図23に示されており、該図23は図13の実装の拡張である。図23から、パルスモードがイネーブル状態であるか否かを評価した後、システムは拡張パルスモードがイネーブル状態であるか否かを評価する。イネーブル状態でないならば、システムは図13に従って進む。
【0086】
拡張パルスモードがイネーブル状態であるならば、要求されたセッティングが受けられる。要求されたセッティングは、(以下に限定されないが)全体周期時間、実施されるべき所望の処置若しくは機能(スカルプ、チョップなど)、バースト若しくは長い連続期間の動力印加の要望、所望の一時的キャビテーションエネルギ印加振幅、所望の一時的キャビテーションエネルギ印加期間、所望のより低い振幅エネルギレベル、所望のより低い振幅エネルギ持続期間、一時的印加エネルギバースト間の小休止、及び/又は他の適切な情報を、含む。要求されたセッティングを決定する或るルックアップテーブルが設けられてもよく、該ルックアップテーブルは、(以下に限定されないが)評価のよいセッティングを所望のセッティングに対する特定の実施パラメータと関連させるテーブルを含む。例えば、所望の機能が“チョップ”であるならば、システムは所望の“チョップ”機能の選択を標準的な若しくは所定のパフォーマンスパラメータのセットに変換し、例えば、150ミリ秒の“バーストオン”時間を設け、続いて350ミリ秒の“長いオフ期間”を設け、その場合“バーストオン”期間は、1ミリ秒の一時的キャビテーションの高エネルギ期間、それに続く3ミリ秒の低エネルギ期間、それに続く1ミリ秒の小休止、更に150ミリ秒の“バーストオン”期間を完全に充足する繰り返しを含む。システムは要求されたセッティングを採用し、それらを操作セット若しくは操作タイミングセットに翻訳する。この操作セットは、超音波エネルギ若しくは動力供給を実施する際、水晶体超音波吸引術ハンドピースの所望の操作を示す。
【0087】
インプット2302は、フットペダル、電子若しくはソフトウエアスイッチ、水晶体超音波吸引術ハンドピースで利用され得るスイッチ、若しくは当業者に公知の他のインプットデバイス等の、最適なインプットデバイスを表し、該インプットデバイスは医師/オペレータに、操作セットに従って印加される超音波に目を向けさせ動作させる。例えば、操作セットに従って減退された動力が印加されるべきときにオン/オフコマンドを発行するが減退された動力が水晶体超音波吸引術ハンドピース先端に印加されないときにはオン/オフコマンドを発行しないフットペダルが、加えられてもよい。種々のインプットデバイスが種々の操作モードをイネーブル状態にし得る。例えば、一つの操作セットに従って超音波動力の印加をし、別の位置に動かすと別の操作セットに従って超音波動力の印加をする複数位置スイッチが設けられてもよい。一方で、スイッチの一つの位置が、一つの操作セットに従って一つのレベルで動力を印加し、スイッチの別の位置が同じ若しくは異なる操作タイミングセットでより高い超音波動力レベルをイネーブル状態にするというものであってもよい。本明細書で利用される操作セットは、本明細書に示すような、パルス及び/又はエネルギの印加、及び動力の印加のオン/オフ期間のタイミングに関するものである。一つの移動止め即ちセッティングがハンドピース30へ洗浄のみ与えるスイッチであり、第2の移動止め即ちセッティングが洗浄とポンプを与え、第3の移動止め即ちセッティングが洗浄と吸引を与え超音波が注入されスイッチ即ちフットペダルを更に連動させると増加し得る、というように、スイッチングが非線形であってもよい。この場合、第3の位置若しくは移動止めに減退されたフットペダルにより、オペレータ若しくは医師は、振幅を含む第1の一時的キャビテーションを伴う第1の操作タイミングセットなどのベースの操作タイミングセット及び振幅に従ってエネルギを印加でき、更に、フットペダルを減退すれば、第2の操作タイミングセット及び/又は第2の振幅の印加ができる。振幅の増加が望まれれば、第3の移動止めを過ぎてフットペダルを減退させると、利用可能な超音波動力、即ち先端ストローク長の0%の値から、超音波動力、即ち先端ストローク長の100%の値まで振幅を線形変更でき、若しくは0%と100%の間の別のある値に線形変更できる。本発明では、エネルギ印加期間の振幅は通常、(ハンドピース30にインプットされる)100%動力で0ワットから35ワットの範囲となる。
【0088】
よく知られているように、本発明の過程及び範囲の内部では、操作セット及び操作タイミングセットは仮想的に利用されてもよい。特に、システムは、多数の構成若しくは操作タイミングセットにて、通常夫々コンピュータを経由してユーザにアクセスし得る操作を可能にする。例えば、ユーザは、一つの操作タイミングセットを用いてチョップ操作を実施し、別の操作タイミングセットを用いてスカルプ操作を実施してもよく、特定の状況に遭遇すればさらに別の操作タイミングセットを利用してもよい。これらの構成は、動的に、即ち“進行中で”操作し得る。
【0089】
システムは通常、フレーム速度を有し、該フレーム速度は、デバイスに対する最小の許容可能なパワーオン若しくはパワーオフの期間より小さい時間であればどの期間でもよい。カウンタはパルス数をカウントし、超音波動力があるフレーム数で供給されることを操作セットが命令するのであれば、電子信号の形態での指示がハンドピースにフレーム時間にて供給される。図23に示される以外の他の実装が利用されてもよく、その場合も本発明の範囲の内である。
【0090】
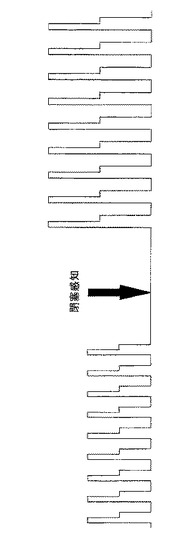
図24Aは、自動の、若しくはユーザコントロールの振幅の変動を示し、振幅は同じタイミングを有する3つの異なるレベルの振幅レベルを伴う。種々の振幅に加えて、代わる代わるのタイミングが利用可能であってもよい。更に、システムは、通常システムの中に配置されるセンサにより感知される閉塞の受容若しくは遭遇をアドレスするように操作してもよい。図3及び図4のように、ハンドピース若しくはシステムは、流れ若しくは減圧、即ち圧力、状況での変動を感知するセンサを利用してもよい。センサにより感知される流れ若しくは減圧/圧力状況は、閉塞の存在を指摘し、閉塞の存在を感知すると、ハンドピース若しくはシステムはコンピュータ18に閉塞の徴候をフィードバックしてもよい。閉塞の徴候によりコンピュータ18は、操作セットを図24Bに示すような閉塞関連操作セットに自動的に改める。
【0091】
本発明が、固い小瘤を除去するのに利用される他の外科処置などの組織摘出を実施する他のシステムに適用可能であり、眼の若しくは水晶体超音波吸引術の処置に限定されないことは、当業者には理解されるところである。就中、スカルプやリシェイプなどの、どのタイプの固い組織除去であっても、本明細書に記すように拡張して超音波動力を印加することにより、扱われ得るということは、理解されるところである。
【0092】
本発明が優位をもって利用され得るように示すために、とりわけ圧電性水晶体超音波吸引術ハンドピースの電圧電流位相関係を利用し、現存状況で一時的キャビテーションを十分に誘導する多重の短期動力バーストを含む比較的短いパルスによって超音波を供給する水晶体超音波吸引術ハンドピースから伝達される超音波動力を制御する方法及び装置を本明細書に記述したが、本発明はそれに限定されるものでないことは理解されるところである。従って、当業者が想定し得る修正、変更、若しくは均等な構成の全ては、添付の請求項に規定するように本発明の範囲内であると考えられる。
【符号の説明】
【0093】
16・・・超音波動力源、18・・・コンピュータ、28・・・位相検出部、30・・・ハンドピース、34・・・洗浄流体源、43・・・スイッチ。
【技術分野】
【0001】
[発明の背景]
[発明の分野]
本発明は、概略、外科組織除去システムの分野に関し、特に、水晶体超音波吸引術などの外科的処置の際の変調パルス超音波動力供給に関する。本出願は、2002年10月21日出願、発明者Kadziauskas等の“新規の拡張されたマイクロバースト超音波動力供給システム及び方法”という名称の米国特許出願第10/278,775号の一部継続出願であり、その全部が参照の上本明細書に組み込まれる。
【背景技術】
【0002】
[関連技術の説明]
水晶体超音波吸引術は、白内障などの目に関する問題点の治療において成功裏に利用されている。水晶体超音波吸引手術は角膜切り口を利用し、少なくとも一つの水晶体超音波吸引術の携帯外科器具、即ちハンドピースの先端を挿入する。ハンドピースは、切り口の内部に配置されると超音波駆動されて眼レンズを乳状化し、若しくは混濁部を砕き微細片にする針を含む。砕かれた混濁部微細片は、続いて、制御されつつ同じハンドピース若しくは別のハンドピースを用いて、除去され得る。医師は、切り口を介してレンズインプラントを眼の中に挿入し得る。切り口は癒合されてもよく、その結果患者は通常劇的に視力が良くなる。
【0003】
公知のように、水晶体超音波吸引術ハンドピースの流体注入若しくは摘出システム、及び動力制御を介する、患者への及び患者からの流体の流れは、実施される処置にとって重大事項である。種々の医学的に認可されてきた技術が、手術のレンズ除去部位に対して用いられている。とりわけ、一つの評判のよい技術は、単一のハンドピースを利用する、水晶体超音波吸引術、洗浄、及び吸引の同時の組み合わせである。この方法は、切り口を形成すること、携帯手術器具を挿入し混濁部即ち眼レンズを乳状化することを含む。この乳状化と同時に、ハンドピースは、乳状化されたレンズの洗浄のための流体と、乳状化されたレンズ及び挿入された流体の吸引のための減圧とを、与える。
【0004】
現下利用可能な水晶体超音波吸引術システムは、可変速度蠕動ポンプ、減圧センサ、調整可能な超音波動力源、及び、吸引速度と減圧と動力レベルを制御するためのオペレータ選択プリセットを伴うプログラマブルマイクロプロセッサを、含む。水晶体超音波吸引術ハンドピースは、圧電性トランスデューサに動力を与え制御するための制御コンソールと、電気ケーブルにより相互に接続する。管により、眼に対する洗浄流体が与えられ、眼からハンドピースを介する流体の吸引回収が可能になる。ハンドピースの中空針は通常、印加される交流電圧により形成される水晶内の圧電効果により、長手軸に沿って駆動され励起される。駆動された水晶の動きはハンドピース内部の機械的共鳴システムにより増幅され、接続する針の動きが、結晶が駆動される周波数に直接に依存し、共鳴周波数で最大限の動きが発生するようにする。共鳴周波数は、相互に接続し、水晶により通常振動する針の質量に一部依存する。
【0005】
水晶体超音波吸引術ハンドピースで用いられる周波数の通常の範囲は、約25kHzと約50kHzの間である。特定のハンドピースインピーダンス及び位相により特徴付けられ得る個々の水晶体超音波吸引術ハンドピースに対して、周波数領域が存在する。上記周波数領域は、上位周波数と下位カットオフ周波数により、境界付けされる。この領域の中心は通常、ハンドピース電気位相が最大値に到達するポイントである。
【0006】
ハンドピース動力移転効率は、式(V*I)(COSΦ)で与えられ、ここでΦ
は位相角度である。この動力移転効率式を利用すると、最も効率的なハンドピース稼動ポイントは、位相が0°に再接近するときに発生する。従って、最適なハンドピース動力移転効率は、できるだけ0°に近い位相値を達成するため動力周波数を制御することを要求する。この目的の達成は、超音波ハンドピースの位相角度はトランスデューサの装荷(loading)にも依存するという事実により、面倒なものになっている。トランスデューサの装荷(loading)は、針を含む機械的共鳴ハンドピースシステムを介して発生する。
【0007】
結果として、位相角度は、操作の間常時判定されて計測され、駆動回路を調整し、最適位相角度に到達し、水晶体超音波吸引術ハンドピースにより一定のエネルギを組織の中に有効に移す。ハンドピースの自動チューニングは、ハンドピース電気信号をモニタし、選択パラメータとの整合性を維持するように周波数を調整することにより、実現され得る。水晶体超音波吸引術ハンドピースのための制御回路は、通常位相検出器とされる、電圧と電流の間の位相を計測する回路を、含んでもよい。水晶体超音波吸引術ハンドピースの操作周波数とは無関係に位相シフトが計測されると、困難が生じる可能性がある。なぜならば、位相シフトはハンドピース操作周波数に依存し、計測における時間遅延はハンドピースの共鳴チューニングのための複雑な較正回路を要求するからである。
【0008】
水晶体超音波吸引術ハンドピースの動力制御は、水晶体超音波吸引手術の成功に対して非常に重要である。ある従前のシステムは、ハンドピース圧電性トランスデューサに印加される電圧と圧電性トランスデューサにより生じる電流との間の位相角度、及び/又は、ハンドピースに加えられる動力パルスの振幅に基づいて、水晶体超音波吸引術ハンドピースのための動力を制御することを要求することを扱う。特定のハンドピースに対して通常の構成が適合され、医師/オペレータの制御に従属して、連続する若しくは一連の固体バーストにて、動力が加えられる。例えば、システムは、150m秒動力を加え、35m秒動力を停止し、動力印加の必要期間、このオン/オフシーケンスを繰り返してもよい。この例では、動力は、水晶体超音波吸引術ハンドピースの圧電性水晶を介して針に加えられ、これにより150m秒超音波動力放出を生じ、更に350m秒水晶、ハンドピース及び針を利用した動力の印加を停止する。この例で動力は150m秒印加されるが、この動力の印加は、概略25kHzと50kHzの間の周波数での圧電性水晶へのシヌソイド波形の印加を含み、従って真には“一定”ではない、ということが理解される。150m秒の期間の動力の印加は、25kHz〜50kHzのシヌサイドの一定の印加と定義される。ある状況では、医師/オペレータは、ある期間これら動力バーストを印加することを、動力の印加を停止し、この動力セッティング若しくは別の動力セッティングで再印加しようとしてもよい。バーストの周波数及び周期は、作用される領域に加えられるバーストのストリームの長さと同様に、通常制御可能である。動力が印加されない期間により、作用される領域でのキャビテーション形成が可能になり、このことによりハンドピース若しくは吸引装置によりもたらされる吸引を利用して破壊された破片の除去が可能になる。
【0009】
更に、医師/オペレータは、レンズを壊す“スカルプ”処置や、核を集め破砕片の強い保持を維持する“チョップ”処置などの、公知の処置を用いようとしてもよい。これらの特別な“チョップ若しくはクオドラント除去”処置は通常、概略50m秒〜200m秒の期間のどの一定のスパンででも動力若しくはエネルギを加えることを、含む。
【0010】
動力のオン/オフ印加により、混濁部の砕片への破壊及び相対的に効率のよい除去が促進される。水晶体超音波吸引術ハンドピースの中の超音波駆動針は利用中に暖かくなるが、このことは一部において水晶体超音波吸引術ハンドピース先端の機械的動きのために生じる摩擦熱の結果である。ある状況では、作用される領域へ連続モードで動力を加える前述の方法は、作用される領域内に無視できない量の熱を生成してしまう。針を通過する洗浄/吸引流体はこの熱を散らせるのに利用され得るが、水晶体超音波吸引術の間に眼の組織のオーバヒートを回避するように留意されねばならず、ある状況では流体の循環は熱を十分には散らし得ない。熱を加えてしまうことによって、作用される領域を損傷するリスクは、相当に否定的側面の効果となり得る。
【0011】
更に、前述の方法での動力の印加は、ある状況では、乱れ及び/又はガタガタ音、更に、領域を解放し粒子を除去するのに相当の流体の利用を要求するような重要な流れ流出を生じることがある。また、一定のグループのエネルギの印加は、印加されるエネルギから結果的に生じるキャビテーションのために、核の破片をハンドピースの先端から押し出してしまうことがある。そのようなキャビテーション状況内に破片を収集して配置することは、多くの状況で困難なことである。この結果の効果は望ましくないものであり、できるだけ最小化すべきものである。
【0012】
この状況で有効に利用される一つのシステムは、発明者Kadziauskas等であり、2002年10月21日に出願され、本出願の譲受人であるアドバンストメディカルオプティクス,インコーポレイティッドに譲渡された米国特許出願10/278,775(特許文献1)に開示される。’775出願(特許出願1)は、長期間における短期のポーズにより散在させられる比較的短時間の動力の印加を利用する超音波動力供給のためのものであり、動力印加の各々の長期間の後には長い停止期間が置かれる。この発明により、従前の一定動力の印加に係る熱の問題が生じることなく、エネルギの印加が可能になる。
【0013】
’775出願(特許出願1)の発明で示された効果を超える有益な効果が、既述の状況でのキャビテーションに係る有益な効果を利用することにより取得され得る、ということを、確実な発展が示している。あるタイプのキャビテーション形成は、ある状況での閉塞の解体の改良のためのものである。キャビテーションの有益な効果を理解し利用することは、従前の発明では生じる熱が発生することなく水晶体超音波吸引処置にて核を十分に除去することに向けられている。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】米国特許出願10/278,775
【発明の概要】
【発明が解決しようとする課題】
【0015】
既述の事項に基づいて、キャビテーションに係る有益点を利用し従前の組織除去システムに係る欠点を最小化するシステムを、提示することは、有用なことである。
【課題を解決するための手段】
【0016】
[発明の概要]
本発明の第1の実施形態では、外科的状況内部で実施される外科的処置の間にエネルギを供給するための方法が示される。上記方法は、流体内部に一時的キャビテーションを十分に誘導する第1のエネルギレベルでエネルギを印加する工程と、流体内部で一時的キャビテーションを達成した後の所定の期間にエネルギを与える工程とを含む。上記のエネルギを与える工程は、第1のエネルギレベルより低い第2のエネルギレベルでエネルギを印加する工程を含む。
【0017】
本発明の第2の実施形態では、流体に関連して利用される組織除去処置の間に超音波エネルギを供給する方法が示される。上記方法は、流体内部で一時的キャビテーションを誘導できる高エネルギ振幅でエネルギを印加する工程と、低エネルギ振幅でエネルギを与え、これにより超音波エネルギ伝導からの組織損傷を最小化する効果を生じる工程とを含む。
【0018】
本発明の第3の実施形態では、流体を含む外科的領域に一時的エネルギを印加する手段を含む外科的装置が示される。前記の一時的エネルギを印加することは、流体内部に一時的キャビテーションを十分に誘導する振幅及び期間でエネルギを印加することを意味する。装置は、上記期間に続いて、より低い振幅エネルギレベルに上記一時的エネルギを減衰し、これによりエネルギ関連障害の危険を減衰する手段も含む。
【0019】
本発明の第4の実施形態では、水晶体超音波吸引処置の間に眼領域に変調された超音波エネルギを与える方法が示される。上記方法は、眼領域内の流体内部に一時的キャビテーションを誘導する計算された高エネルギレベルで眼領域にエネルギを与える工程であって、第1の所定の期間に発生する工程と、上記第1の所定の期間の後に眼領域へのエネルギの印加を減衰する工程と、第2の所定の期間待機する工程と、眼領域への上記印加と減衰を繰り返す工程とを含む。
【0020】
本発明の第5の実施形態では、針とその針を超音波振動する電気的手段とを有するハンドピースと、ハンドピース電気的手段にパルス化された電気的動力を与える動力源手段と、オペレータに電気的パルスの振幅を選択させるインプット手段と、ハンドピース針から流体を与える手段と、関連する流体を有する外科的状況内で行われる外科的処置の間にハンドピースに供給される動力を制御する制御手段とを含む装置が示される。上記制御手段は、流体内に一時的キャビテーションを誘導するのに十分なレベル及び期間で動力を印加することと、上記期間の後より低いレベルへ動力を減衰し、これにより障害の見込みを減少することとにより、供給される動力を制御する。
【0021】
本発明の第6の実施形態では、針とその針を超音波振動する電気的手段とを有するハンドピースと、ハンドピース電気的手段にパルス化された電気的動力を与える動力源手段と、オペレータに電気的パルスの振幅を選択させるインプット手段と、ハンドピース針から流体を与える手段と、ハンドピースに供給される動力を制御する制御手段とを含む方法が示される。上記制御手段は、利用される外科的状況内部で一時的キャビテーションを誘導するように計算されたレベル及び期間で動力を印加することにより、供給される動力を制御する。
【0022】
本発明の第7の実施形態では、一つの状況で超音波エネルギを供給する方法が示される。上記方法は、上記状況で一時的キャビテーションを誘導するのに十分なレベル及び期間で超音波エネルギを初期に印加する工程と、第2の非ゼロのより低い超音波エネルギ期間に印加した後、印加される超音波エネルギを減衰する工程とを含む。
【0023】
本発明の第8の実施形態では、泡を含む状況の内部で超音波エネルギを供給する方法が示される。上記方法は、一時的キャビテーションを中に十分に誘導するように上記状況の内部に相対的に高いレベルの超音波エネルギを印加する工程を含む。上記一時的キャビテーションは、超音波エネルギに係る力によって、上記状況の内部で泡相対的に速く膨張し激しく崩壊することを含む。
【発明の効果】
【0024】
添付の図面に示される好適な実施形態に関する添付の詳細な開示を読めば、本発明の全ての実施形態に関するこれら及び他の目的及び利点は当業者には明白となる。
【0025】
本発明は、添付の図面において、例として示されるのであり、限定として示されるものではない。
【図面の簡単な説明】
【0026】
【図1】本発明の一つの実施形態に係る水晶体超音波吸引システムの機能ブロック図である。
【図2】ハンドピースに対する一つ以上の圧力による洗浄流体を供給する装置を含む別の実施形態に係る水晶体超音波吸引システムの機能ブロック図である。
【図3】可変の吸引速度を伴う水晶体超音波吸引システムの閉塞−非閉塞モードの操作を示すフローチャートである。
【図4】可変の超音波動力レベルを伴う水晶体超音波吸引システムの閉塞−非閉塞モードの操作を示すフローチャートである。
【図5】水晶体超音波吸引システムの可変のデューティサイクルパルス関数の操作を示すフローチャートである。
【図6】可変の洗浄速度を伴う水晶体超音波吸引システムの閉塞−非閉塞モードの操作を示すフローチャートである。
【図7】圧電性水晶体超音波吸引術ハンドピースに印加される電圧を示す正弦波と、結果として生じるハンドピース内への電流との間の90°の位相シフトのプロットである。
【図8】通常の圧電性水晶体超音波吸引術ハンドピースの位相関係とインピーダンスのプロットである。
【図9】本発明に係る方法を実施するのに適合的な改良された位相検出回路のブロック図である。
【図10】種々のハンドピース/針に対する周波数の関数としての位相の関係のプロットである。
【図11】位相角度を利用して最大位相モード操作でハンドピース/針パラメータを制御する位相制御水晶体超音波吸引システムの機能ブロック図である。
【図12】位相角度を利用して装荷(load)検出方法でハンドピース/針パラメータを制御する位相制御水晶体超音波吸引システムの機能ブロック制御図である。
【図13】パルス制御水晶体超音波吸引システムの機能ブロック制御図である。
【図14】ハンドピースを経由する動力レベルコントローラ及びコンピュータにより与えられる、パルスに対する種々の超音波エネルギパルス特性を示す。
【図15】種々のレベルセッティングの下で流体内に連続してエネルギを加えるシステムに対する信号強度のプロットである。
【図16】種々のレベルセッティングの下で流体内に連続してエネルギを加えるシステムに対してプロットされる、ノイズ底値を除去しキャビテーションが偏位した後の信号強度を示す。
【図17】周期的動力印加セッティングを用いるシステムのパフォーマンスを示す。
【図18】連続的操作に対する信号強度を周期的動力印加と対比する。
【図19】連続操作信号強度と、周期的マイクロバーストエネルギ印加信号強度との間の、対比を示す。
【図20】種々のエネルギ印加セッティングにおける、時間に対する相対的キャビテーションエネルギを示す。
【図21】本発明に係る波形を示す。
【図22a】本発明に係る波形の別の例を示す。
【図22b】本発明に係る波形の別の例を示す。
【図22c】本発明に係る波形の別の例を示す。
【図22d】本発明に係る波形の別の例を示す。
【図22e】本発明に係る波形の別の例を示す。
【図22f】本発明に係る波形の別の例を示す。
【図23】本発明の拡張された超音波エネルギ波形の計算及び配布の概念ブロック図を示す。
【図24A】流れ、圧力、若しくは減圧状況での、波形の例を示す。
【図24B】流れ、圧力、若しくは減圧状況での、閉塞の存在若しくは他の感知された変化にて、与えられる波形の例を示す。
【発明を実施するための形態】
【0027】
[発明の詳細な説明]
[デバイス]
図1は、概略符号10により示される、ブロック図での水晶体超音波吸引システムを表す。該システムは図1にて点線で囲まれるコントロールユニット12を有し、該コントロールユニット12は、減圧源となる可変速度善導ポンプ14、パルス化された超音波動力源16、及び、ポンプ速度コントローラ20と超音波動力レベルコントローラ22とに制御出力を与えるマイクロプロセッサコンピュータ18を、含む。減圧センサ24は、コンピュータ18に入力を与え、該コンピュータ18は蠕動ポンプ14の入力側の減圧レベルを示す。適切な排出はベント26により為される。
【0028】
位相検出器28は、入力をコンピュータ8に与え、該コンピュータ8は、ハンドピース/針30に加えられる電圧を表す正弦波と、結果としてハンドピース30の中に流れる電流との間の位相シフトを表す。ハンドピース30のブロック部分は、針を超音波振動するための、針及び電気手段を、通常は圧電性水晶を、含む。コントロールユニット12は、水晶体超音波吸引術ハンドピース/針30にライン32で動力を供給する。洗浄流体源34は、ライン36を介してハンドピース/針30に流体接続する。洗浄流体及び超音波動力は、図面上でブロック38で示される、患者の目、即ち作用されるエリア若しくは領域にハンドピース/針30によって、加えられる。一方で、洗浄源は、ハンドピースから独立した分離路を介して眼38に経路付けられてもよい。眼38は、ライン/ハンドピース針40及びライン42を介してコントロールユニット蠕動ポンプ14により、吸引される。ハンドピース30上に配置されたスイッチ43は、医師/オペレータがハンドピースへの電気パルスの振幅を本明細書で説明するようにコンピュータ18、動力レベルコントローラ22及び超音波動力源16を介して選択する手段として、利用され得る。スイッチ43の代わりに、例えば、フットペダル(図示せず)などの適切な手段が利用されてもよい。
【0029】
図2は、図1に示されるシステム10の要素の全てを組み込む別の水晶体超音波吸引システム50を示す。ここで同一の符号は図1に示す要素と同一である。洗浄流体源34に加えて、第2の洗浄流体源35が源34、35と共に設けられ、夫々ライン34a、35aを介してハンドピース/針30に入るライン56と、バルブ59とに、接続する。バルブ59は、ライン52を経由する動力レベルコントローラ22からの信号に応答して、ライン34A及び源34と、ライン35A及び源35とを、二者択一的にハンドピース/針30と繋ぐように機能する。
【0030】
図に示すように、洗浄流体源34、35は、ハンドピース/針30の上に種々の高さに配置され、容器35内の流体のヘッド部を容器34内の流体のヘッド部より大きくして、複数の圧力で洗浄流体をハンドピースに注入する手段を設ける。異なる長さのライン44、46を含むハーネス49は、支持部48に繋げられると、ハンドピース/針30の上部にて異なる高さに容器34,35を配置する手段となる。
【0031】
洗浄流体のために種々の高さで容器を利用することは、異なる圧力で洗浄流体を供給する手段であることを意味し、更に二者択一的に、独立ポンプに例えば独立循環ループ(図示せず)が設けられてもよい。そのような容器及びポンプは、動力コントローラ22からの命令で、ハンドピース/針30に洗浄流体を不連続の圧力で供給できる。
【0032】
[操作]
コンピュータ18は、前述の減圧センサ24からの信号によって、蠕動ポンプ14へのインプットライン47内に減圧レベルをプリセットするように応答する。ハンドピース30の閉塞−非閉塞状況に対応するコントロールユニット内の操作は、図3の流れ図に示される。図3に示すように、ハンドピース吸引ラインが閉塞していれば、減圧センサ24に感知される減圧レベルは増加し得る。コンピュータ18は、吸引速度、減圧レベル及び超音波動力レベルに対するオペレータ設定可能リミットを設け得る。図3に示されるように、減圧センサ24の感知する減圧レベルがハンドピース吸引ライン40の閉塞の結果として所定の値に達すると、コンピュータ18はポンプ速度コントロータ20に信号を与え蠕動ポンプ14の速度を変更し、このとこにより吸引速度を変更する。ハンドピース/針30を閉塞する部材の特徴に依存して、蠕動ポンプ14の速度は増加もし得るし減少もし得る。閉塞する部材が壊れると、減圧センサ24は減圧レベルでの低下を示し、コンピュータ18に蠕動ポンプ14の速度を非閉塞時の操作速度に変更させる。
【0033】
蠕動ポンプ14の速度を変更することにより吸引速度の水晶体超音波吸引パラメータを変更することに加えて、超音波動力源16の動力レベルがハンドピース30の閉塞若しくは非閉塞状況の関数として変動し得る。図4は、コンピュータ10と動力レベルコントローラ22を用いる超音波動力源動力レベルの制御の基本フォームを、流れ図フォームで示す。図4の流れ図は図3の流れ図に対応するが、超音波動力レベルの水晶体超音波吸引パラメータを変動する。
【0034】
通常の水晶体超音波吸引術ハンドピースのインピーダンスは、周波数と共に変動するのであり、換言すればハンドピースは反応性のものである。周波数の関数としての通常のハンドピース位相とインピーダンスとの依存性は、図8に示される。図8では、曲線64は周波数の関数としてハンドピースの電流と電圧の間の位相差を示し、曲線66は周波数の関数としてハンドピースのインピーダンスの変化を示す。インピーダンスは、約25kHz〜約50kHzの範囲などの、通常の範囲の周波数に対して、“Fr”で低いものを“Fa”で高いものを示す。
【0035】
ハンドピースの自動チューニングは、ハンドピース電気信号をモニタすること、及び選択されたパラメータとの一貫性を維持するように周波数を調整することを要求する。水晶体超音波吸引術ハンドピースの先端にて生じる装荷を補償するために、ハンドピースへの駆動電圧が増加され、一方装荷が検出されて減少され、そして装荷が除去される。この位相検出器は、このタイプのシステムでは通常コントローラの一部である。このような従来の位相検出器では、通常のアウトプットは、電圧と電流波形の配列の差異、例えば、図7に示すような−90°に比例する電圧である。図8に示すように、ハンドピースを利用する場合、波形は位相で変動し、これに対応してアウトプット波形も変動する。
【0036】
従前、電気位相を計測する標準技術は、位相、及び周波数に比例する電圧を読み取ることである。このタイプの回路は、単一周波数で、利用に対して較正され得る。周波数を変更すると較正データが適当なものでなくなる。単一周波数システムでも見られるように、訂正された位相値は回路パラメータの変動のためにドリフトする。
【0037】
一つの他の利用可能な形態では、位相検出器アウトプットの値を周波数検出器の値と比較して真の位相を計算するマイクロプロセッサを利用する。この形態はかなり複雑であり、分解能の限界だけでなく個別の回路のドリフトに従属する。図9に示されるブロック図は、発明に関して実施するのが適切な改良された位相検出器を表す。図示される機能ブロックの各々は、従来の公知の通常の発明の回路と、以下に説明するように個々のブロックにより表される機能を生成するための部品を含む。
【0038】
システムは、水晶体超音波吸引術ハンドピースへの電圧信号の減衰器76、電流感知抵抗78、及びハンドピース30電流に対する固定ゲイン増幅器を用いて、水晶体超音波吸引術ハンドピース30からの電圧インプット72と電流74を適切な信号に変換する。その後、システムは、交流電圧信号80と交流電流信号82を、水晶体超音波吸引術電圧を表すアナログを論理レベルクロック信号に変換するコンパレータ84、86に送る。
【0039】
システムは、コンパレータ84からのアウトプットを、周波数を2で割るように構成されたDフリップフロップ集積回路90の中に供給する。続いてシステムは、集積回路90のアウトプット92を積分器として構成されたオペアンプ94の中に供給する。積分器94のアウトプット96は、最終の振幅がハンドピース周波数に逆比例する鋸歯波形である。タイミングジェネレータ98は電圧信号に同期するクロックを利用しA/Dコンバータタイミングを、更には個々のサイクルの終わりに積分器をリセットするタイミングを生成する。システムは、この信号を、ライン96を介してA/Dコンバータの電圧参照の中に供給する。
【0040】
電流立下がり縁に対する電圧立上がり縁検出器100は、Dフリップフロップ集積回路を利用し、ハンドピース電圧信号の立上がり縁を分離する。この信号は、ハンドピース30の電圧とハンドピース30の電流との間のタイミングプロセスを開始する開始信号として利用される。電流立下がり縁に対する電圧立上がり縁検出器100のアウトプット102は、ハンドピース30電圧波形の立上がり縁とハンドピース電流波形の立下がり縁の発生における時間差異に比例するパルスである。
【0041】
システムは、電流立下がり縁に対する電圧立上がり縁検出器100からの、ハンドピース位相信号102のためのもう一つの積分器104を用いる。積分器回路104のアウトプット106は、ピーク振幅が、水晶体超音波吸引術電圧波形の立上がり縁の開始とハンドピース電流波形の開始の立下がり縁における時間差異に比例する、鋸歯波形である。システムは、積分器回路104のアウトプット106を、アナログインプット、即ちA/D(アナログ−デジタルコンバータ)集積回路110の中に供給する。A/Dコンバータ110への正参照インプット96は、操作周波数に逆比例する電圧である。位相電圧信号96は、電圧開始の立ち上がり縁と、電流開始の立ち下がり縁との間の位相差に比例し、また、操作周波数に逆比例する。この構成では、電圧参照96と位相電圧106の2つの信号周波数は、周波数の範囲にわたって互いに跡を追い、このことにより、A/Dコンバータ110のアウトプットは操作周波数から独立した位相を生成する。
【0042】
この構成では、システムコンピュータ(図1及び図2参照)には、0〜255カウントが位相の0〜359°を一貫して表すリアルタイムデジタル位相信号が与えられる。較正のフォームは不必要である。利用される周波数にかかわらず計測に一貫性があるからである。例えば、38kHzと47kHzの操作周波数のAMP、150×105V/秒の立ち上がり時間を有する積分器、及び256カウントを有する8ビットA/Dコンバータを用いると、一定比率が維持され周波数の変動が結果に影響を与えない。このことは以下の例で示す。
【0043】
[例1]
[38kHz操作]
1クロック周期期間=1/F@38kHz=26.32×10−6秒
Iに対する1期間の部位=90°=26.32×10−6秒
4で割る=6.59×10−6秒
1参照周期に対する積分器アウトプット=(150×103V/秒)×(26.32×10−6秒)=3.95ボルト
90°周期期間からの積分器アウトプット=(150×103V/秒)×(6.59×10−6秒)=0.988ボルト
A/Dコンバータからの結果としての数値カウント=3.95ボルト/256カウント=0.0154ボルト/カウント
38kHzでの90°に対するA/Dカウントの実際の数=0.988/0.0154=64カウント
【0044】
[例2]
[47kHz動作]
1クロック周期期間=1/F@47kHz=21.28×10−6秒
Iに対する1期間の部位=90°=21.28×10−6秒
4で割る=5.32×10−6秒
1参照周期に対する積分器アウトプット=(150×103V/秒)×(21.28×10−6秒)=3.19ボルト
90°周期期間からの積分器アウトプット=(150×103V/秒)×(5.32×10−6秒)=0.798ボルト
A/Dコンバータからの結果としての数値カウント=3.19ボルト/256カウント=0.0124ボルト/カウント
47kHzでの90°に対するA/Dカウントの実際の数=0.798/0.0124=64カウント
【0045】
このことは、本システムの基線操作を、即ち水晶体超音波吸引術ハンドピースを略認容できるレベルに調整できることを、示す。
【0046】
[エネルギ配布]
以下の節は概略、一般的に水晶体超音波吸引処置を実効的に実施するために採用されるマイクロバーストエネルギの配布のタイプに、概略関連する。図5を参照して、選択された動力レベルの関数として変動するパルスデューティ周期を生成するための超音波動力源の基本的コントロールを示す流れ図を示す。個々の動力パルスは20ミリ秒より短い期間を有してもよい。図5に示すように、かつ例示に過ぎないが、33%パルスデューティ周期は、動力レベルが所与の閾値を超えるまで動作するのであり、この場合は33%である。その時点では、超音波動力レベルが50%の閾値を超えるまではパルスデューティ周期は50%まで増加することになり、更にこの時点ではパルスデューティ周期は66%まで増加する。超音波動力レベルが66%の閾値を超えると、動力源が連続して稼動する、即ち、100%のデューティ周期となる。33、50及び60のパーセントが図5に示されているが、種々のデューティ周期シフト点を定義するために、種々のデューティ周期に加えて他のパーセントレベルが選択されてもよい、ということは理解されるべきことである。この構成でのパルス期間は20ミリ秒以下であればよい。本明細書で説明する追跡メカニズムを伴うこのような制御により、20ミリ秒以下の期間でエネルギのバーストが可能になる。
【0047】
図13を参照して、20ミリ秒以下の速いパルス期間に、運動エネルギ又は機械エネルギで組織を十分切除できるようなエネルギが与えられる。超音波エネルギパルスは、次のパルスが活性化する前に結果として熱レベルを大きく下げるために十分長く、停止されてもよい。医師/オペレータは、選択されたパルス振幅、洗浄及び吸引流体流速に呼応してスイッチ143及びコントロールユニット22を介して線形状にパルス振幅を変動させ、パルスデューティ周期を制御できる。上述のように、オフデューティ期間若しくは周期は、後続のパルスが活性化する前に確実に熱散逸するように、設定される。このように、増加した振幅は、先端加速度を増加し、これにより組織損傷する熱生成に対し熱散逸を増大する。即ち、医師/オペレータは、組織密度を介して切除するのに必要な正しい加速度を選択する線形動力コントロールを用いることができる。ここでコントロールユニットは、組織が熱から代償不全になることを回避するために、20ミリ秒以下のパルス幅と“オフタイム”において対応する変動を為すものである。コントロールユニットは、選択された水晶体超音波吸引術ハンドピース(全体ワット数)若しくは水晶体超音波吸引の先端(大きさ、重量)に依存するように、プログラムされる。このように速いパルスを利用することは、レーザが非常に短い期間のパルスで稼動するのと同様である。この構成でのパルスは、秒あたり約25パルス〜2000パルスの間の反復率を有し得る。
【0048】
図5を参照して、ハンドピース吸引ライン38が閉塞されると、減圧センサ24により感知される減圧レベルは増加する。コンピュータ18は、制御のためのオペレータが設定可能な限界を有する。洗浄流体供給部32、33の限界はハンドピース30に繋がるものである。2つの洗浄流体源、即ち容器32、33が示されているが、容器はいくつ用いられてもよい。
【0049】
図6に示すように、減圧センサ24による減圧レベルが所与のレベルに達すると、吸引ハンドピースライン38の閉塞の結果として、コンピュータはバルブ38を制御し、バルブに容器34、35の各々とハンドピース/針30との間の流体の連絡を制御せしめる。
【0050】
上述のようなハンドピース/針30を閉塞する部材の特性、及び内科医の要求と技術に依存して、ハンドピースにより与えられる洗浄流体の圧力は増加若しくは減少し得る。閉塞された部材がきれいにされると、減圧センサ24は減圧レベルで低下を示し、バルブ38に容器34、35を非閉塞レベルの圧力に切り換えせしめる。
【0051】
3つの容器(図示せず)などの一つ以上の容器が利用され、容器システムに関して上述したように、バルブは相互接続してその3つの容器のどれかからの洗浄流体を選択する。
【0052】
減圧の関数として水晶体超音波吸引術ハンドピース/針30のパラメータを変更することに加えて、ハンドピースの閉塞又は非閉塞状況は、位相曲線の位相シフト若しくは形状における変化によってハンドピース/針により感知される装荷の変化に基づいて決定され得る。種々のハンドピース30装荷、装荷無し(最大位相)、軽い装荷、中等の装荷及び重い装荷に対して、周波数の関数としての複数の位相角度が図10に示される。
【0053】
図11を参照すると、最大位相モード操作を表しており、実際の位相が決定され最大位相と比較される。実際の位相が最大位相に等しい若しくはそれより大きいならば、通常の吸引関数が稼動する。実際の位相が最大位相より小さいならば、吸引速度が変更され、変更は位相変化に比例することになる。図12は、装荷(図10参照)検出が操作の中に組み込まれる最大装荷以下における操作を表す。
【0054】
最大位相モード操作を表す、図11に示されるように、ハンドピース吸引が閉塞されると、位相検出部センサ28により感知される位相は減少する(図10参照)。コンピュータ18は、吸引速度、減圧レベル及び超音波動力レベルに対してオペレータ設定可能限定を有する。図11に示すように、ハンドピース吸引ライン40の閉塞の結果として位相検出部28により感知される位相が所与のレベルに到達すると、コンピュータ18は、ポンプ速度コントローラ20に対し蠕動ポンプ14の速度の変更を支持し、これにより吸引速度が変更される。
【0055】
ハンドピース/針30を閉塞する部材の特徴に依存して、蠕動ポンプ14の速度は増加し得る、若しくは減少し得る。閉塞部材が粉砕されると、位相検出部28は位相角度の増加を示し、コンピュータ18に蠕動ポンプ14の速度を非閉塞動作速度に変更せしめる。
【0056】
蠕動ポンプ14の速度を変化することにより吸引速度の水晶体超音波吸引術パラメータを変更することに加えて、超音波動力源16の動力レベル及び/又はデューティ周期は上述のようにハンドピース30の閉塞又は非閉塞の状況の関数として変動され得る。
【0057】
[マイクロバースト拡張操作]
従前の操作のための種々のパルス特性が図14に示される。図14から、パルスの操作は、プロットAに示すように約25kHz〜約50kHzの周波数の動力の一定の印加でもよく、プロットBに示すように40ミリ秒のオンの期間と40ミリ秒のオフの期間との80ミリ秒毎に一度のもの、即ち、毎秒12.5パルスを示すものであってもよい。一方で、超音波動力供給は、プロットCに示すように20ミリ秒のオンと20ミリ秒のオフからなる40ミリ秒に一度発生するものであってもよい。プロットDは、10ミリ秒のオンと10ミリ秒のオフからなる20ミリ秒毎に加えられる動力を示す。プロットEに示すような他の非周期的な構成が採用されてもよく、それは40ミリ秒毎に周期的に10ミリ秒動力の印加があり、30ミリ秒のオフがあるようなものである。
【0058】
一周期の間一定の動力レベルで超音波動力がハンドピース及び針に印加されるときには、これらの動力の印加にインタバルは連続した一定の期間を表す。更に、図において動力が連続したDCタイプの印加で加えられるように見える場合、図は、約25kHz〜50kHzの周波数で圧電性水晶に印加されるシヌソイド波形を含む動力の実際の印加を示すことが意図されている。従って動力の印加は真実には“一定”ではない。この150ミリ秒の期間の動力の印加は、25kHz〜50kHzのシヌソイドの一定の印加として定義される。
【0059】
[キャビテーション]
本発明は、キャビテーションの有益な効果を利用しこれに従ってエネルギを印加することによって、図14の波形の拡張を示す。外科環境におけるキャビテーションは、塩水、水、若しくは他の利用可能流体などの流体内の瞬間の泡の激しい崩壊として定義され得る。キャビテーションは、細胞及び核が水晶体超音波吸引術を含む超音波外科システムで壊され切除される初歩的手段である。上記システムは、水晶体超音波吸引術ハンドピース30の先端から発出する音波圧力場を形成する一連の音波圧力波を与えることにより、キャビテーションを生成し得る。音波圧力波は、約38kHzの周波数などの、操作周波数でのレンズ先端の前後方の振動の結果である。
【0060】
キャビテーションは操作流体での瞬間の泡の生成、振動及び崩壊である。水晶体超音波吸引術若しくは他の外科的シナリオでは、外科的超音波先端から発出する音波により泡が形成され、従って泡は音波キャビテーションと呼ばれることがある。これら泡の激しい崩壊は、核を破壊し若しくは組織の破砕・チョップの特性を生成する力の多くを形成し得る。以下に示す共鳴振動などの、圧力場の影響の下での他の泡の動作も、望ましい生物学的な効果を生成し得る。
【0061】
この超音波状況で、音波圧力は音波源強度Qs若しくは先端の体積速度に比例する。ここで、体積速度は有効先端領域A(通常は環形)に先端速度を掛けたものである。先端速度は、操作周波数の掛けられた先端振動振幅δと2πとの積である。先端は、流体内の音波波長と比べて相対的に小さく、操作周波数で音若しくは単極源のポイントラジエータとして作用する。
【0062】
この状況では、低周波数音は、先端からの距離とは逆に低くなる圧力レベルを伴って、球形状に放射する傾向がある。周波数ω*(2πf)で搏動する単極源から距離rでの圧力場は以下の数1で与えられる。
【0063】
【数1】
ここで、ρ0とcは媒体の密度と音速であり、kは波数、即ちω/cであり、Qsは源強度である。数1を利用して、圧力は以下の数2で表される。
【0064】
【数2】
数2から、圧力は先端領域、行程体積、及び操作周波数の2乗に関連する。数2は種々のサイズの先端、周波数、及び行程体積の間の圧力等価を決定する一般的ガイドラインを与える。
【0065】
音波源強度Qsは以下のように計算される。連続した環状の平坦な端部先端が、24500Hzで動作し、半径は1.44mm、振動振幅100μm(先端偏位200μm)であると仮定する。
[数3]
Qs=Area*velocity
=(πr2)*ω*δ
=π*(0.00144)2*(2*π*24500)*(100*10−6)
Qs=100×10−6m/秒
【0066】
この例での全体の音波動力Wは、以下のように計算される。
[数4]
W=ρ0×c×k2×(Qs)/8π
ここで
[数5]
k=ω/c
=(2*π*f)/c
=2*π*24500/1500〜=100
W=1000*1500*1002*(10*10−6)2/8π
〜=6音波ワット
【0067】
音は水、塩水又は他の液体などの流体を通るので、音は微細な泡に出会うことになる。波の“引っ張り”部分や“希薄”部分や“陰性”部分に曝された泡は、拡張する傾向を有する。“圧縮”部位や“陽性”部位に曝された泡は、サイズを縮小する即ち僅かに縮む傾向がある。力の差異により拡張された状態にあるとき気体は散乱して泡になる。泡がサイズを縮小すると、気体は消散する、即ち拡散する傾向がある。縮小した泡の表面積は拡張した泡の表面積より小さいので、周期の“拡張”部位の間よりも、周期のこの部位の間の方がより少ない気体が散乱する傾向がある。繰り返して泡はサイズを増加する傾向があり、矯正散乱として知られる現象である。圧力変動が重大でないならば、拡張状態と縮小状態の間のサイズの差異は、適切な正味の気体流入を起こすのには重大ではない。
【0068】
泡は矯正散乱によりサイズを大きくする際、これらの泡は、気圧、表面張力などの泡への流体力学的力が、印加される音場と力学的平衡、若しくは共鳴を達成するようなサイズを獲得し得る。力学的平衡の状況で、泡は勢いよく振動し、崩壊し破壊しうる。圧力が重大であるとき、泡のこの振動及び崩壊が発生する。圧力が矯正散乱を生成するのに十分な大きさである場合、小さい泡は継続してサイズを増大し、振動して崩壊する傾向がある。泡は完全な崩壊なくても分割し、その結果より小さい泡になってサイズを増加し処理を計継続する。この現象は安定キャビテーションと称されることがある。
【0069】
安定キャビテーションは、圧力場が存在する限り比較的安定して動作する傾向がある泡の堆積若しくは雲を生成する。安定キャビテーションでは、多数の泡が、完全な激しい崩壊無くばらばらになる。安定キャビテーションを促進することは、細胞及び核切除に適合的でないことがある。
【0070】
一時的キャビテーションは、激しい泡崩壊として定義され得る。泡が細胞壁などの境界で激しく崩壊するとき、泡は細胞壁で大量の圧力を消費する。小領域内部で非常に高い圧力及び温度を生成する水撃にも、効果は同様である。これらの高圧力/高温度の状況は、組織を破壊し細胞内の蛋白質を変性させることがある。一時的キャビテーションは、音波駆動周波数に応じて非常に特定のサイズの泡の素早い拡張と激しい崩壊から生じる。この素早い拡張と激しい崩壊は、駆動波形の力から生じる。一時的キャビテーションはある閾値レベル以下では全く発生し得ないという点において、一時的キャビテーションは、駆動波形圧力レベルに敏感である。閾値以上では、正確なサイズの泡が利用可能である限り、一時的キャビテーションが発生する。
【0071】
キャビテーション現象のための絶対閾値は一般的に周波数に依存する。キャビテーションを生成する際、本明細書に記載する構成は、駆動の低周波数超音波波形からのエネルギを、機械的に取り扱える泡に変換する。レンズ先端から発出する駆動波形は、ポンピング波と称されてもよい。より多くのキャビテーションが発生する際、より多くのエネルギがポンピング波から受けられる。キャビテーションのための閾値を下回るような、低い圧力レベルでは、先端から発せられる低周波数圧力は先端偏位に概ね比例する。この低圧力のシナリオでは、細胞壁若しくは核に衝撃を与える圧力はほとんど無い。レンズ先端が振動し摩擦熱を発生できるならば、機械的な衝撃が生じうる。駆動偏位レベルが増加すればキャビテーションの活動が増加する傾向がある。更に駆動振幅が増加すると、最早振幅を追跡し得ない放射低周波数圧力となってしまう。圧力と振幅の間のこの非相関関係は、エネルギがキャビテーションへ移動することの結果として発生する。駆動振幅が更に増大すると、低周波数圧力場が減少し得る。そのような圧力場での減少は、先端を覆い、圧力場を保護するクッションとして作用する泡の、結果である。従って、キャビテーションエネルギに対するポンピングエネルギの比率は、駆動振幅が増大するにつれて変動する。
【0072】
図15は、エネルギの一定レベルを印加する、即ち、2.0秒などの期間に動力を連続的に印加するシステムに対して、流体に加えられた結果としてのエネルギを示す。複数の高い振幅スパイクを有する信号1502は、低い動力セッティングを有するものであり、一方で、より低く変動の多い特性を有する信号1501は、より高い動力セッティングを有する。低動力信号1502は比較的大きい信号偏位を示し、一時的キャビテーションを示す。一時的なピークの間では、低動力信号1502に対する信号レベルは、概ねノイズ床である。より変動が多くより高い動力信号1501は、より低いピークレベルを示すがノイズ床より上の連続信号を示し、安定キャビテーションを示す。
【0073】
図15のシステムに対してキャビテーション偏位のノイズ床及び区画を除去すると、図16になる。2つの波形の高動力信号1601と低動力信号1602は、図示される期間において殆ど同一の全体キャビテーションエネルギを示す。従って、一時的キャビテーションがより小さい周波数で発生するなら、一時的キャビテーションは領域若しくは環境により大きいエネルギを解放する傾向がある。
【0074】
図17は、約0.15ミリ秒のオンがあり約0.35ミリ秒のオフが続くというように、動力がより短いバーストで加えられるシステムのレスポンスを示す。図17のプロットはノイズ閾値操作の後のパフォーマンスを示す。第1の2つのバースト1701、1702は重要な一時的キャビテーションで始まるが、この一時的キャビテーションは比較的速く衰える傾向がある。図18は、連続する動力の印加と比べて、0.15ミリ秒のオンがあり約0.35ミリ秒のオフが続くこの長いパルスを示す。長いパルス信号1802と連続する信号1801は、期間全体に渡り同様の全体キャビテーションエネルギを有するが、パルス応答1802は駆動動力の約半分以下を用いる。このより低い駆動動力は、約半分よりも短い時間に対してエネルギを加えられるシステムが原因である。
【0075】
図19は、周囲への連続する動力の印加1901と、より短いバースト構成1902を示す。このより短いバースト期間1902は、0.2秒の全体期間に6ミリ秒のエネルギの印加と24ミリ秒の休止を繰り返すような、一連のバーストを示し、その後0.5秒間のゼロ動力のような、僅少な動力を印加する。図19は、このより短いバースト期間1902の駆動周波数エネルギの殆どあらゆるバーストは一時的キャビテーションを生成する傾向があることを示す。バースト間の時間は、流体が十分なサイズの泡、即ち溶解した気体で領域を充たすように十分に動き、再び一時的キャビテーションを受容する状況を生成し得る、と考えられる。
【0076】
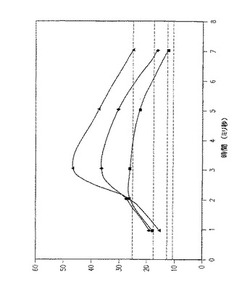
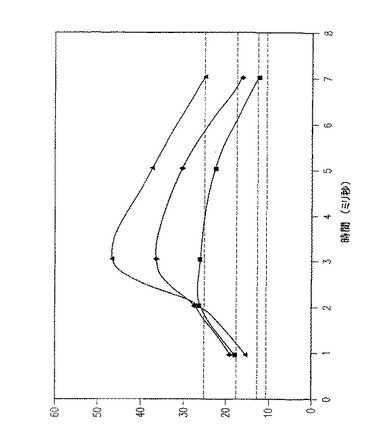
本システムでは、短い持続期間のエネルギ供給の存在でのパフォーマンスの観察を基にすると、キャビテーションは図20に示すようなエネルギ供給に関連する。図20は、水晶体超音波吸引術環境における種々のエネルギ印加と、その結果として生じるキャビテーションエネルギを示す。図20から、2乃至3ミリ秒が、キャビテーションエネルギが最大値に立ち上がるのに通常要求される。2乃至3ミリ秒は、レンズ先端が要求される完全な偏位に到達し、キャビテーションプロセス、特に一時的キャビテーションが開始するのに、要求される時間を示す。開始すると、供給されるエネルギは衰える傾向にあり、一時的キャビテーションから安定キャビテーションへの移行を示す。6ミリ秒後、ハンドピースはエネルギ減衰し、先端の残余の“共鳴”のみがキャビテーションを生成する。
【0077】
図20の点線は、図15、図16、図18及び図19に示される、連続印加されるエネルギの存在から読み取られたエネルギ読み取りを示す。図20から、キャビテーションエネルギレベルは連続モードでは非常に低くなる。
【0078】
[変調エネルギ供給]
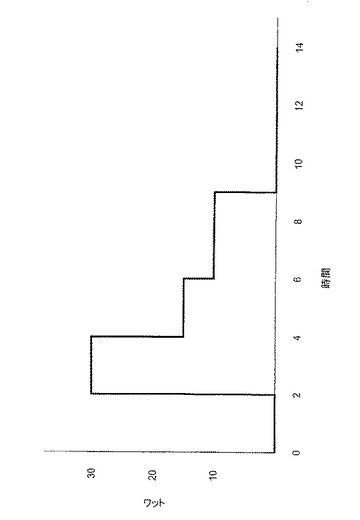
本発明は、以下のように安定キャビテーション及び一時的キャビテーションを利用する。動力は短いパルスで加えられるが、これらの短いパルスは上述のレンズ環境に対する分割されたエネルギレベルを有する。特に、図21に示すような波形が用いられ得る。他の類似の波形が利用されてもよく、それらはレンズ状況、先端サイズ、操作周波数、流体状況及び閉塞状況などの遭遇する状況に依存することになる。但し、それらに限定されるものではない。図21は、2ミリ秒などの短い持続期間の30ワットの初期エネルギ期間2101による、初期動力を供給する変調されたパルスを示す。30ワットはハンドピースへのインプットを示す。第2の期間2102は、2ミリ秒の期間に15ワットで供給される動力を示す。第3の期間2103は、この例では3ミリ秒間の、10ワットなどの特定レベルで供給される期間を示す。変調された即ち段階化された動力供給構成の目的は、できだけ速く一時的キャビテーションを生成するのに必要な距離より大きく針ストロークを初期化することである。一時的キャビテーションを誘導するのに要求される動力閾値に達すると、動力はパルスの残余の間弱められてもよい。
【0079】
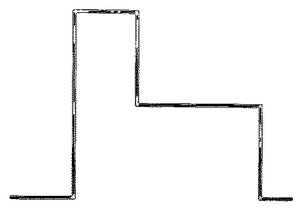
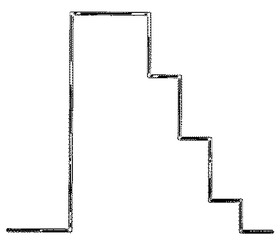
当業者に理解されるように、他のタイミング及び動力実装が用いられてもよい。動力スキームの例が図22a−fに示され、ここでは動力レベル及びタイミングが様々である。時間及び動力を変動させる目的は、大きな熱を生成せずに与えられた状況でできるだけ速く一時的キャビテーションを達成することである。図22aは、2ミリ秒の30ワットの変調パルスと4ミリ秒の15ワットの変調パルスとの、2つのステップを示す。図22bは、2.5ミリ秒の35ワットパルス、続いて1ミリ秒の25ワットパルス、続いて1ミリ秒の15ワットパルス、続いて1ミリ秒の5ワットパルスを示す。図22cは、2ミリ秒の25ワットパルス、0.5ミリ秒の15ワットパルス、2.5ミリ秒の10ワットパルスを示す。図22dは、3ミリ秒の20ワットパルス、3ミリ秒の10ワットパルスを示す。図22eは、1.8ミリ秒の40ワットパルス、2ミリ秒の25ワットパルス、3ミリ秒の15ワットパルスを示す。図22fは、3.5ミリ秒の30ワットパルス、0.5ミリ秒の25ワットパルス、0.5ミリ秒の20ワットパルス、0.5ミリ秒の15ワットパルス、及び1ミリ秒の10ワットパルスを示す。当業者には理解されるように、状況によって他の時間や期間が選択されてもよい。
【0080】
図22a−fは、所定の時間でオンオフする完全な矩形波を示すが、波が矩形であることが必須であることは全くない。図22g−iは本発明の別の形態をしめし、ここでは丸められた波、即ち漸化動力供給曲線が手術領域に印加される。図22g−iに示すように、また、当業者には理解されるように、通常初期により高いエネルギのサージ若しくはバーストを供給し、その初期のサージからエネルギをドロップオフさせることにより、現存する状況に基づいて十分な動力が供給されて一時的キャビテーションを誘導する。初期のエネルギサージの大きさ及び時間は、現存の状況に依存するのであり、通常の水晶体超音波吸引手術状況に対しては20に示されるのと同様な曲線に類似する、又は全体若しくは一部基づく特性を示してもよい。
【0081】
本発明の重要なファクタは、状況内に比較的短い時間での一時的キャビテーションを与え、領域内に供給されるエネルギを最小化することを試みるエネルギの許容可能な下落を続かせることである。従って、少なくとも一つのより低い動力のパルスが間もなくその後に、又は即座にその後に続く強い若しくは高いエネルギ初期パルスは、前述の所望のパフォーマンスを達成するための重要な変調動力供給方法である。
【0082】
本明細書で議論される状況では、超音波エネルギの印加は、加えられる超音波エネルギの下落が後に続く短期持続期間に加えられる強い若しくは高いエネルギの短いパルスとして、特徴付けられる。そのような波形は図22a〜図22iに示される波形を含むが、それに限定されるものではない。図20に示されるキャビテーションエネルギは、動力の印加に関連するが、実際には超音波エネルギ期間ではない期間に発生してもよい。例えば、以下は限定ではないが、超音波エネルギが概略3ミリ秒印加され、これらの3ミリ秒間でピークに到達し、一方結果としてキャビテーションエネルギが、6ミリ秒時点などの後の時点でピークに到達してもよい。より長い若しくはより短い期間が採用され、及び/又は観察されてもよく、種々の期間の有効性はそれら期間が採用される状況に依存する。
【0083】
前述の事柄より、アウトプット状況に依存して、一時的若しくは安定キャビテーションが超音波デバイスによって種々の条件で生成されてもよい。このキャビテーションは、開示されたものに加えて種々の状況で利用され得、それら状況は化学的処理状況を含む(但し限定ではない)。キャビテーションは、医学的処置にて若しくは医学的処置を高めるためにも、採用され得る。例えば、医学的処置の強化は、例えば、医学的処置を助力すること、若しくは促進することを含む。化学的処理に関して、既述するようにエネルギを印加することが、超音波エネルギの伝達から生じる熱を最小化する傾向を有し、更に所与の化学的結果を実現するのに要求されるインプットエネルギを最小化する傾向があってもよい。
【0084】
一時的キャビテーションは、レンズ状況で有効に発生するために、ある特定の条件を要求する傾向があり、それら条件は(限定ではないが)流体内の適切なサイズの初期の泡及び/又は溶解気体の利用を含む。適切なサイズの泡及び/又は溶融気体が利用可能でなければ、低い流れのために、若しくは連続する動力印加モードでの高いアウトプットレベルの存在により、一時的キャビテーションは安定キャビテーションに転移する傾向がある。一時的キャビテーションに存するエネルギは安定キャビテーションのものよりも高くなる傾向がある。一定エネルギに対抗するパルスエネルギは、流体を適正なサイズの泡に補給し一時的キャビテーションを促進し、組織への熱損傷を生じる見込みもより少なくしてより少ない全体動力を消費し供給するに過ぎないというような、利点が備わる。更に、パルスエネルギ供給モードの存するキャビテーションは、本明細書に記載するレンズシステムに対して、最大値に達するのに概略2〜3ミリ秒を求める。キャビテーションは、一時的キャビテーションが安定キャビテーションに転移するにつれて減少し始める。
【0085】
本明細書で記述するエネルギのパルスは、本議論に関連してプログラミングされた際にソフトウエア、ハードウエア、ファームウエア、若しくはそれらの組み合わせにより、又は、当業者に公知のデバイス若しくは装置を用いて、実施されてもよい。ソフトウエアで実装され得る本発明の操作のサンプルのブロック図は図23に示されており、該図23は図13の実装の拡張である。図23から、パルスモードがイネーブル状態であるか否かを評価した後、システムは拡張パルスモードがイネーブル状態であるか否かを評価する。イネーブル状態でないならば、システムは図13に従って進む。
【0086】
拡張パルスモードがイネーブル状態であるならば、要求されたセッティングが受けられる。要求されたセッティングは、(以下に限定されないが)全体周期時間、実施されるべき所望の処置若しくは機能(スカルプ、チョップなど)、バースト若しくは長い連続期間の動力印加の要望、所望の一時的キャビテーションエネルギ印加振幅、所望の一時的キャビテーションエネルギ印加期間、所望のより低い振幅エネルギレベル、所望のより低い振幅エネルギ持続期間、一時的印加エネルギバースト間の小休止、及び/又は他の適切な情報を、含む。要求されたセッティングを決定する或るルックアップテーブルが設けられてもよく、該ルックアップテーブルは、(以下に限定されないが)評価のよいセッティングを所望のセッティングに対する特定の実施パラメータと関連させるテーブルを含む。例えば、所望の機能が“チョップ”であるならば、システムは所望の“チョップ”機能の選択を標準的な若しくは所定のパフォーマンスパラメータのセットに変換し、例えば、150ミリ秒の“バーストオン”時間を設け、続いて350ミリ秒の“長いオフ期間”を設け、その場合“バーストオン”期間は、1ミリ秒の一時的キャビテーションの高エネルギ期間、それに続く3ミリ秒の低エネルギ期間、それに続く1ミリ秒の小休止、更に150ミリ秒の“バーストオン”期間を完全に充足する繰り返しを含む。システムは要求されたセッティングを採用し、それらを操作セット若しくは操作タイミングセットに翻訳する。この操作セットは、超音波エネルギ若しくは動力供給を実施する際、水晶体超音波吸引術ハンドピースの所望の操作を示す。
【0087】
インプット2302は、フットペダル、電子若しくはソフトウエアスイッチ、水晶体超音波吸引術ハンドピースで利用され得るスイッチ、若しくは当業者に公知の他のインプットデバイス等の、最適なインプットデバイスを表し、該インプットデバイスは医師/オペレータに、操作セットに従って印加される超音波に目を向けさせ動作させる。例えば、操作セットに従って減退された動力が印加されるべきときにオン/オフコマンドを発行するが減退された動力が水晶体超音波吸引術ハンドピース先端に印加されないときにはオン/オフコマンドを発行しないフットペダルが、加えられてもよい。種々のインプットデバイスが種々の操作モードをイネーブル状態にし得る。例えば、一つの操作セットに従って超音波動力の印加をし、別の位置に動かすと別の操作セットに従って超音波動力の印加をする複数位置スイッチが設けられてもよい。一方で、スイッチの一つの位置が、一つの操作セットに従って一つのレベルで動力を印加し、スイッチの別の位置が同じ若しくは異なる操作タイミングセットでより高い超音波動力レベルをイネーブル状態にするというものであってもよい。本明細書で利用される操作セットは、本明細書に示すような、パルス及び/又はエネルギの印加、及び動力の印加のオン/オフ期間のタイミングに関するものである。一つの移動止め即ちセッティングがハンドピース30へ洗浄のみ与えるスイッチであり、第2の移動止め即ちセッティングが洗浄とポンプを与え、第3の移動止め即ちセッティングが洗浄と吸引を与え超音波が注入されスイッチ即ちフットペダルを更に連動させると増加し得る、というように、スイッチングが非線形であってもよい。この場合、第3の位置若しくは移動止めに減退されたフットペダルにより、オペレータ若しくは医師は、振幅を含む第1の一時的キャビテーションを伴う第1の操作タイミングセットなどのベースの操作タイミングセット及び振幅に従ってエネルギを印加でき、更に、フットペダルを減退すれば、第2の操作タイミングセット及び/又は第2の振幅の印加ができる。振幅の増加が望まれれば、第3の移動止めを過ぎてフットペダルを減退させると、利用可能な超音波動力、即ち先端ストローク長の0%の値から、超音波動力、即ち先端ストローク長の100%の値まで振幅を線形変更でき、若しくは0%と100%の間の別のある値に線形変更できる。本発明では、エネルギ印加期間の振幅は通常、(ハンドピース30にインプットされる)100%動力で0ワットから35ワットの範囲となる。
【0088】
よく知られているように、本発明の過程及び範囲の内部では、操作セット及び操作タイミングセットは仮想的に利用されてもよい。特に、システムは、多数の構成若しくは操作タイミングセットにて、通常夫々コンピュータを経由してユーザにアクセスし得る操作を可能にする。例えば、ユーザは、一つの操作タイミングセットを用いてチョップ操作を実施し、別の操作タイミングセットを用いてスカルプ操作を実施してもよく、特定の状況に遭遇すればさらに別の操作タイミングセットを利用してもよい。これらの構成は、動的に、即ち“進行中で”操作し得る。
【0089】
システムは通常、フレーム速度を有し、該フレーム速度は、デバイスに対する最小の許容可能なパワーオン若しくはパワーオフの期間より小さい時間であればどの期間でもよい。カウンタはパルス数をカウントし、超音波動力があるフレーム数で供給されることを操作セットが命令するのであれば、電子信号の形態での指示がハンドピースにフレーム時間にて供給される。図23に示される以外の他の実装が利用されてもよく、その場合も本発明の範囲の内である。
【0090】
図24Aは、自動の、若しくはユーザコントロールの振幅の変動を示し、振幅は同じタイミングを有する3つの異なるレベルの振幅レベルを伴う。種々の振幅に加えて、代わる代わるのタイミングが利用可能であってもよい。更に、システムは、通常システムの中に配置されるセンサにより感知される閉塞の受容若しくは遭遇をアドレスするように操作してもよい。図3及び図4のように、ハンドピース若しくはシステムは、流れ若しくは減圧、即ち圧力、状況での変動を感知するセンサを利用してもよい。センサにより感知される流れ若しくは減圧/圧力状況は、閉塞の存在を指摘し、閉塞の存在を感知すると、ハンドピース若しくはシステムはコンピュータ18に閉塞の徴候をフィードバックしてもよい。閉塞の徴候によりコンピュータ18は、操作セットを図24Bに示すような閉塞関連操作セットに自動的に改める。
【0091】
本発明が、固い小瘤を除去するのに利用される他の外科処置などの組織摘出を実施する他のシステムに適用可能であり、眼の若しくは水晶体超音波吸引術の処置に限定されないことは、当業者には理解されるところである。就中、スカルプやリシェイプなどの、どのタイプの固い組織除去であっても、本明細書に記すように拡張して超音波動力を印加することにより、扱われ得るということは、理解されるところである。
【0092】
本発明が優位をもって利用され得るように示すために、とりわけ圧電性水晶体超音波吸引術ハンドピースの電圧電流位相関係を利用し、現存状況で一時的キャビテーションを十分に誘導する多重の短期動力バーストを含む比較的短いパルスによって超音波を供給する水晶体超音波吸引術ハンドピースから伝達される超音波動力を制御する方法及び装置を本明細書に記述したが、本発明はそれに限定されるものでないことは理解されるところである。従って、当業者が想定し得る修正、変更、若しくは均等な構成の全ては、添付の請求項に規定するように本発明の範囲内であると考えられる。
【符号の説明】
【0093】
16・・・超音波動力源、18・・・コンピュータ、28・・・位相検出部、30・・・ハンドピース、34・・・洗浄流体源、43・・・スイッチ。
【特許請求の範囲】
【請求項1】
外科的状況内部で実施される外科的処置の間にエネルギを供給するための方法であって、
流体内部に一時的キャビテーションを十分に誘導する第1のエネルギレベルでエネルギを印加する工程と、
流体内部で一時的キャビテーションを達成した後の所定の期間にエネルギを与える工程と
を含み、
上記のエネルギを与える工程は、第1のエネルギレベルより低い第2のエネルギレベルでエネルギを印加する工程を含むことを特徴とする方法。
【請求項2】
所定の期間が3ミリ秒よりも短いことを特徴とする請求項1に記載の方法。
【請求項3】
所定の期間が1ミリ秒よりも短いことを特徴とする請求項1に記載の方法。
【請求項4】
第3のエネルギレベルでエネルギを与える工程の後の所定の期間に追加のエネルギを与える工程を更に含むことを特徴とする請求項1に記載の方法。
【請求項5】
第2のエネルギレベルは実質的にゼロであることを特徴とする請求項1に記載の方法。
【請求項6】
第2のエネルギレベルでエネルギを与える工程に続いて、僅少のエネルギを印加する工程を更に含むことを特徴とする請求項1に記載の方法。
【請求項7】
僅少のエネルギを印加する工程の後に、与える工程と印加する工程とを繰り返す工程を更に含むことを特徴とする請求項6に記載の方法。
【請求項8】
流体に関連して利用される組織除去処置の間に超音波エネルギを供給する方法であって、
流体内部で一時的キャビテーションを誘導できる高エネルギ振幅でエネルギを印加する工程と、
低エネルギ振幅でエネルギを与え、これにより超音波エネルギ伝導からの不都合な組織損傷を最小化する効果を生じる工程とを含む方法。
【請求項9】
低エネルギレベルでエネルギを与える工程が、僅少の動力レベルでエネルギを与える工程を含むことを特徴とする請求項8に記載の方法。
【請求項10】
上記エネルギを与える工程に続いて、第2の低エネルギ振幅レベルで付加的なエネルギを与える工程を更に含むことを特徴とする請求項8に記載の方法。
【請求項11】
上記エネルギを与える工程に続いて動力供給を抑制する工程と、
所定の期間後、上記の印加する工程と与える工程とを繰り返す工程とを
更に含むことを特徴とする請求項8に記載の方法。
【請求項12】
エネルギを印加する工程が、上記の一時的キャビテーションを誘導するように計算された所定の期間に発生することを特徴とする請求項8に記載の方法。
【請求項13】
エネルギを印加する工程が、8ミリ秒以下の持続期間を有するキャビテーションエネルギを生じることを特徴とする請求項8に記載の方法。
【請求項14】
エネルギを印加する工程が、4ミリ秒以下の持続期間を有するキャビテーションエネルギを生じることを特徴とする請求項8に記載の方法。
【請求項15】
流体を含む外科的領域に一時的エネルギを印加する手段であって、前記の一時的エネルギを印加することは、流体内部に一時的キャビテーションを十分に誘導する振幅及び期間でエネルギを印加することを意味する手段と、
上記期間に続いて、より低い振幅エネルギレベルに上記一時的エネルギを減衰し、これによりエネルギ関連障害の危険を減衰する手段と
を含む外科的装置。
【請求項16】
上記一時的エネルギを減衰する手段が、僅少の動力レベルでエネルギを与える手段を含むことを特徴とする請求項15に記載の装置。
【請求項17】
より低い振幅エネルギレベルに上記一時的エネルギを減衰するのに続いて、第2のより低い振幅エネルギレベルで付加的なエネルギを与える手段を、更に含むことを特徴とする請求項15に記載の装置。
【請求項18】
上記一時的エネルギを減衰するのに続いて動力供給を抑制する手段と、
上記の印加することと、減衰することと、抑制することを繰り返す手段と
を更に含むことを特徴とする請求項15に記載の装置。
【請求項19】
上記の印加することと減衰することを繰り返す手段を
更に含むことを特徴とする請求項15に記載の装置。
【請求項20】
一時的エネルギを印加する上記手段は、8ミリ秒以下の期間高められたレベルの一時的キャビテーションエネルギを印加することを生じることを特徴とする請求項15に記載の装置。
【請求項21】
一時的エネルギを印加する上記手段は、4ミリ秒以下の期間高められたレベルの一時的キャビテーションエネルギを印加することを生じることを特徴とする請求項15に記載の装置。
【請求項22】
上記の印加する手段は、針と針を超音波振動する電気的手段とを有する水晶体超音波吸引術ハンドピースを含むことを特徴とする請求項15に記載の装置。
【請求項23】
束縛/解放する手段を更に含み、
エネルギの印加が所望される第1の所望のときには、装置の操作が束縛され、エネルギの印加が所望されない第2の所望のときには、装置の操作が解放されることを特徴とする請求項22に記載の装置。
【請求項24】
上記の束縛/解放する手段が、スイッチを含むことを特徴とする請求項23に記載の装置。
【請求項25】
水晶体超音波吸引処置の間に眼領域に変調された超音波エネルギを与える方法において、
眼領域内の流体内部に一時的キャビテーションを誘導する計算された高エネルギレベルで眼領域にエネルギを与える工程であって、第1の所定の期間に発生する工程と、
上記第1の所定の期間の後に眼領域へのエネルギの印加を減衰する工程と、
第2の所定の期間待機する工程と、
眼領域への上記印加と減衰を繰り返す工程と
を含む方法。
【請求項26】
上記印加する工程の終了と上記減衰する工程の開始との間の時間が実質的にゼロであることを特徴とする請求項25に記載の方法
【請求項27】
エネルギを印加する工程により、8ミリ秒以下の持続期間を有するキャビテーションエネルギを生じることを特徴とする請求項25に記載の方法。
【請求項28】
エネルギを印加する工程により、4ミリ秒以下の持続期間を有するキャビテーションエネルギを生じることを特徴とする請求項25に記載の方法。
【請求項29】
針とその針を超音波振動する電気的手段とを有するハンドピースと、
ハンドピース電気的手段にパルス化された電気的動力を与える動力源手段と、
オペレータに電気的パルスの振幅を選択させるインプット手段と、
ハンドピース針から流体を与える手段と、
関連する流体を有する外科的状況内で行われる外科的処置の間にハンドピースに供給される超音波動力を制御する制御手段と
を含み、
上記制御手段は、流体内に一時的キャビテーションを誘導するのに十分なレベル及び期間で動力を印加することと、上記期間の後より低いレベルへ動力を減衰し、これにより障害の見込みを減少することとにより、供給される超音波動力を制御することを特徴とする装置。
【請求項30】
動力をより低いレベルに減衰するのに続いて、制御手段が僅少の動力レベルでエネルギを更に与えることを特徴とする請求項29に記載の装置。
【請求項31】
上記期間の後、動力をより低いレベルに減衰するのに続いて、制御手段が第2のより低いレベルで付加的なエネルギを更に与えることを特徴とする請求項29に記載の装置。
【請求項32】
制御手段が、
動力をより低いレベルに減衰するのに続いて、動力を供給することを抑制する手段と、
上記印加することと、減衰することと、抑制することとを繰り返す手段と
を更に含むことを特徴とする請求項29に記載の装置。
【請求項33】
制御手段が、上記印加することと減衰することを繰り返す手段を更に含むことを特徴とする請求項29に記載の装置。
【請求項34】
上記期間に動力を印加することにより、8ミリ秒以下の持続期間を有するキャビテーションエネルギを生じることを特徴とする請求項29に記載の方法。
【請求項35】
上記期間に動力を印加することにより、4ミリ秒以下の持続期間を有するキャビテーションエネルギを生じることを特徴とする請求項29に記載の方法。
【請求項36】
上記制御手段が束縛/解放する手段を更に含み、
エネルギの印加が所望される第1の所望のときには、装置の操作が束縛され、エネルギの印加が所望されない第2の所望のときには、装置の操作が解放されることを特徴とする請求項29に記載の装置。
【請求項37】
上記の束縛/解放する手段が、スイッチを含むことを特徴とする請求項36に記載の装置。
【請求項38】
針とその針を超音波振動する電気的手段とを有するハンドピースと、
ハンドピース電気的手段にパルス化された電気的動力を与える動力源手段と、
オペレータに電気的パルスの振幅を選択させるインプット手段と、
ハンドピース針から流体を与える手段と、
ハンドピースに供給される振動機械動力を制御する制御手段と
を含み、
上記制御手段は、利用される外科的状況内部で一時的キャビテーションを誘導するように計算されたレベル及び期間で動力を印加することにより、供給される振動機械動力を制御することを特徴とする装置。
【請求項39】
制御手段が、一時的キャビテーションを誘導するように計算された期間に続いて動力を減衰することにより、動力を更に制御することを特徴とする請求項38に記載の装置。
【請求項40】
制御手段が、インプット手段を介して特定された振幅で、減衰された動力を印加することを特徴とする請求項39に記載の装置。
【請求項41】
制御手段が、一時的キャビテーションを誘導するように計算されたレベル及び期間で動力を印加するのに続いて、僅少のエネルギを供給することで、動力を制御することを特徴とする請求項38に記載の装置。
【請求項42】
エネルギの印加が所望される第1の所望のときには、制御手段を束縛し、エネルギの印加が所望されない第2の所望のときには、制御手段を解放する手段を、更に含むことを特徴とする請求項38に記載の装置。
【請求項43】
上記の束縛する手段がスイッチを含むことを特徴とする請求項42に記載の装置。
【請求項44】
一つの状況で超音波エネルギを供給する方法であって、
該状況で一時的キャビテーションを誘導するのに十分なレベル及び期間で超音波エネルギを初期に印加する工程と、
第2の非ゼロのより低い超音波エネルギ期間に印加した後、印加される超音波エネルギを減衰する工程と
を含む方法。
【請求項45】
診断に対して利用されることを特徴とする請求項44に記載の方法。
【請求項46】
化学処理に対して利用されることを特徴とする請求項44に記載の方法。
【請求項47】
上記印加する工程が、超音波エネルギ伝達から発生する熱を最小化する傾向にあることを特徴とする請求項46に記載の方法。
【請求項48】
上記印加する工程が、所与の化学的結果を実現するのに要求されるインプットエネルギを最小化する傾向にあることを特徴とする請求項46に記載の方法。
【請求項49】
医学的処置に対して利用されることを特徴とする請求項44に記載の方法。
【請求項50】
医学的処置を拡張するために利用されることを特徴とする請求項44に記載の方法。
【請求項51】
上記の印加する工程と減衰する工程が、超音波エネルギ伝達から生じる不都合な組織損傷を最小化することを特徴とする請求項44に記載の方法。
【請求項52】
状況内部において上記一時的キャビテーションは、超音波エネルギに関連する力から生じる泡の比較的急速な拡張及び激しい崩壊を含む請求項44に記載の方法。
【請求項53】
溶融されたガスを含む状況の内部で超音波エネルギを供給する方法であって、一時的キャビテーションを中に十分に誘導するように上記状況の内部に相対的に高いレベルの超音波エネルギを印加する工程を含み、
上記一時的キャビテーションは、相対的に短い期間に超音波エネルギに係る力によって、上記状況の内部に溶融されたガスを相対的に速く膨張し激しく崩壊することを含むことを特徴とする方法。
【請求項54】
相対的に高いレベルの超音波エネルギを印加する工程に続いて、上記状況の内部でより低いレベルの超音波エネルギを印加する工程を、更に含むことを特徴とする請求項53に記載の方法。
【請求項55】
診断のために利用されることを特徴とする請求項53に記載の方法。
【請求項56】
化学的処理のために採用されることを特徴とする請求項53に記載の方法。
【請求項57】
上記印加する工程が超音波エネルギ伝達から生じる熱を最小限にする傾向があることを特徴とする請求項56に記載の方法。
【請求項58】
上記印加する工程が所与の化学的結果をもたらすのに要求されるインプットエネルギを最小限にする傾向があることを特徴とする請求項56に記載の方法。
【請求項59】
医療的処置のために採用されることを特徴とする請求項53に記載の方法
【請求項60】
医療的処置を拡張するために利用されることを特徴とする請求項53に記載の方法。
【請求項61】
上記の印加する工程及び減衰する工程が、超音波エネルギ伝達から生じる有害な組織損傷を最小限にすることを特徴とする請求項53に記載の方法。
【請求項62】
上記の印加する工程が、超音波エネルギ伝達から生じる有害な組織損傷を最小限にすることを特徴とする請求項53に記載の方法。
【請求項1】
外科的状況内部で実施される外科的処置の間にエネルギを供給するための方法であって、
流体内部に一時的キャビテーションを十分に誘導する第1のエネルギレベルでエネルギを印加する工程と、
流体内部で一時的キャビテーションを達成した後の所定の期間にエネルギを与える工程と
を含み、
上記のエネルギを与える工程は、第1のエネルギレベルより低い第2のエネルギレベルでエネルギを印加する工程を含むことを特徴とする方法。
【請求項2】
所定の期間が3ミリ秒よりも短いことを特徴とする請求項1に記載の方法。
【請求項3】
所定の期間が1ミリ秒よりも短いことを特徴とする請求項1に記載の方法。
【請求項4】
第3のエネルギレベルでエネルギを与える工程の後の所定の期間に追加のエネルギを与える工程を更に含むことを特徴とする請求項1に記載の方法。
【請求項5】
第2のエネルギレベルは実質的にゼロであることを特徴とする請求項1に記載の方法。
【請求項6】
第2のエネルギレベルでエネルギを与える工程に続いて、僅少のエネルギを印加する工程を更に含むことを特徴とする請求項1に記載の方法。
【請求項7】
僅少のエネルギを印加する工程の後に、与える工程と印加する工程とを繰り返す工程を更に含むことを特徴とする請求項6に記載の方法。
【請求項8】
流体に関連して利用される組織除去処置の間に超音波エネルギを供給する方法であって、
流体内部で一時的キャビテーションを誘導できる高エネルギ振幅でエネルギを印加する工程と、
低エネルギ振幅でエネルギを与え、これにより超音波エネルギ伝導からの不都合な組織損傷を最小化する効果を生じる工程とを含む方法。
【請求項9】
低エネルギレベルでエネルギを与える工程が、僅少の動力レベルでエネルギを与える工程を含むことを特徴とする請求項8に記載の方法。
【請求項10】
上記エネルギを与える工程に続いて、第2の低エネルギ振幅レベルで付加的なエネルギを与える工程を更に含むことを特徴とする請求項8に記載の方法。
【請求項11】
上記エネルギを与える工程に続いて動力供給を抑制する工程と、
所定の期間後、上記の印加する工程と与える工程とを繰り返す工程とを
更に含むことを特徴とする請求項8に記載の方法。
【請求項12】
エネルギを印加する工程が、上記の一時的キャビテーションを誘導するように計算された所定の期間に発生することを特徴とする請求項8に記載の方法。
【請求項13】
エネルギを印加する工程が、8ミリ秒以下の持続期間を有するキャビテーションエネルギを生じることを特徴とする請求項8に記載の方法。
【請求項14】
エネルギを印加する工程が、4ミリ秒以下の持続期間を有するキャビテーションエネルギを生じることを特徴とする請求項8に記載の方法。
【請求項15】
流体を含む外科的領域に一時的エネルギを印加する手段であって、前記の一時的エネルギを印加することは、流体内部に一時的キャビテーションを十分に誘導する振幅及び期間でエネルギを印加することを意味する手段と、
上記期間に続いて、より低い振幅エネルギレベルに上記一時的エネルギを減衰し、これによりエネルギ関連障害の危険を減衰する手段と
を含む外科的装置。
【請求項16】
上記一時的エネルギを減衰する手段が、僅少の動力レベルでエネルギを与える手段を含むことを特徴とする請求項15に記載の装置。
【請求項17】
より低い振幅エネルギレベルに上記一時的エネルギを減衰するのに続いて、第2のより低い振幅エネルギレベルで付加的なエネルギを与える手段を、更に含むことを特徴とする請求項15に記載の装置。
【請求項18】
上記一時的エネルギを減衰するのに続いて動力供給を抑制する手段と、
上記の印加することと、減衰することと、抑制することを繰り返す手段と
を更に含むことを特徴とする請求項15に記載の装置。
【請求項19】
上記の印加することと減衰することを繰り返す手段を
更に含むことを特徴とする請求項15に記載の装置。
【請求項20】
一時的エネルギを印加する上記手段は、8ミリ秒以下の期間高められたレベルの一時的キャビテーションエネルギを印加することを生じることを特徴とする請求項15に記載の装置。
【請求項21】
一時的エネルギを印加する上記手段は、4ミリ秒以下の期間高められたレベルの一時的キャビテーションエネルギを印加することを生じることを特徴とする請求項15に記載の装置。
【請求項22】
上記の印加する手段は、針と針を超音波振動する電気的手段とを有する水晶体超音波吸引術ハンドピースを含むことを特徴とする請求項15に記載の装置。
【請求項23】
束縛/解放する手段を更に含み、
エネルギの印加が所望される第1の所望のときには、装置の操作が束縛され、エネルギの印加が所望されない第2の所望のときには、装置の操作が解放されることを特徴とする請求項22に記載の装置。
【請求項24】
上記の束縛/解放する手段が、スイッチを含むことを特徴とする請求項23に記載の装置。
【請求項25】
水晶体超音波吸引処置の間に眼領域に変調された超音波エネルギを与える方法において、
眼領域内の流体内部に一時的キャビテーションを誘導する計算された高エネルギレベルで眼領域にエネルギを与える工程であって、第1の所定の期間に発生する工程と、
上記第1の所定の期間の後に眼領域へのエネルギの印加を減衰する工程と、
第2の所定の期間待機する工程と、
眼領域への上記印加と減衰を繰り返す工程と
を含む方法。
【請求項26】
上記印加する工程の終了と上記減衰する工程の開始との間の時間が実質的にゼロであることを特徴とする請求項25に記載の方法
【請求項27】
エネルギを印加する工程により、8ミリ秒以下の持続期間を有するキャビテーションエネルギを生じることを特徴とする請求項25に記載の方法。
【請求項28】
エネルギを印加する工程により、4ミリ秒以下の持続期間を有するキャビテーションエネルギを生じることを特徴とする請求項25に記載の方法。
【請求項29】
針とその針を超音波振動する電気的手段とを有するハンドピースと、
ハンドピース電気的手段にパルス化された電気的動力を与える動力源手段と、
オペレータに電気的パルスの振幅を選択させるインプット手段と、
ハンドピース針から流体を与える手段と、
関連する流体を有する外科的状況内で行われる外科的処置の間にハンドピースに供給される超音波動力を制御する制御手段と
を含み、
上記制御手段は、流体内に一時的キャビテーションを誘導するのに十分なレベル及び期間で動力を印加することと、上記期間の後より低いレベルへ動力を減衰し、これにより障害の見込みを減少することとにより、供給される超音波動力を制御することを特徴とする装置。
【請求項30】
動力をより低いレベルに減衰するのに続いて、制御手段が僅少の動力レベルでエネルギを更に与えることを特徴とする請求項29に記載の装置。
【請求項31】
上記期間の後、動力をより低いレベルに減衰するのに続いて、制御手段が第2のより低いレベルで付加的なエネルギを更に与えることを特徴とする請求項29に記載の装置。
【請求項32】
制御手段が、
動力をより低いレベルに減衰するのに続いて、動力を供給することを抑制する手段と、
上記印加することと、減衰することと、抑制することとを繰り返す手段と
を更に含むことを特徴とする請求項29に記載の装置。
【請求項33】
制御手段が、上記印加することと減衰することを繰り返す手段を更に含むことを特徴とする請求項29に記載の装置。
【請求項34】
上記期間に動力を印加することにより、8ミリ秒以下の持続期間を有するキャビテーションエネルギを生じることを特徴とする請求項29に記載の方法。
【請求項35】
上記期間に動力を印加することにより、4ミリ秒以下の持続期間を有するキャビテーションエネルギを生じることを特徴とする請求項29に記載の方法。
【請求項36】
上記制御手段が束縛/解放する手段を更に含み、
エネルギの印加が所望される第1の所望のときには、装置の操作が束縛され、エネルギの印加が所望されない第2の所望のときには、装置の操作が解放されることを特徴とする請求項29に記載の装置。
【請求項37】
上記の束縛/解放する手段が、スイッチを含むことを特徴とする請求項36に記載の装置。
【請求項38】
針とその針を超音波振動する電気的手段とを有するハンドピースと、
ハンドピース電気的手段にパルス化された電気的動力を与える動力源手段と、
オペレータに電気的パルスの振幅を選択させるインプット手段と、
ハンドピース針から流体を与える手段と、
ハンドピースに供給される振動機械動力を制御する制御手段と
を含み、
上記制御手段は、利用される外科的状況内部で一時的キャビテーションを誘導するように計算されたレベル及び期間で動力を印加することにより、供給される振動機械動力を制御することを特徴とする装置。
【請求項39】
制御手段が、一時的キャビテーションを誘導するように計算された期間に続いて動力を減衰することにより、動力を更に制御することを特徴とする請求項38に記載の装置。
【請求項40】
制御手段が、インプット手段を介して特定された振幅で、減衰された動力を印加することを特徴とする請求項39に記載の装置。
【請求項41】
制御手段が、一時的キャビテーションを誘導するように計算されたレベル及び期間で動力を印加するのに続いて、僅少のエネルギを供給することで、動力を制御することを特徴とする請求項38に記載の装置。
【請求項42】
エネルギの印加が所望される第1の所望のときには、制御手段を束縛し、エネルギの印加が所望されない第2の所望のときには、制御手段を解放する手段を、更に含むことを特徴とする請求項38に記載の装置。
【請求項43】
上記の束縛する手段がスイッチを含むことを特徴とする請求項42に記載の装置。
【請求項44】
一つの状況で超音波エネルギを供給する方法であって、
該状況で一時的キャビテーションを誘導するのに十分なレベル及び期間で超音波エネルギを初期に印加する工程と、
第2の非ゼロのより低い超音波エネルギ期間に印加した後、印加される超音波エネルギを減衰する工程と
を含む方法。
【請求項45】
診断に対して利用されることを特徴とする請求項44に記載の方法。
【請求項46】
化学処理に対して利用されることを特徴とする請求項44に記載の方法。
【請求項47】
上記印加する工程が、超音波エネルギ伝達から発生する熱を最小化する傾向にあることを特徴とする請求項46に記載の方法。
【請求項48】
上記印加する工程が、所与の化学的結果を実現するのに要求されるインプットエネルギを最小化する傾向にあることを特徴とする請求項46に記載の方法。
【請求項49】
医学的処置に対して利用されることを特徴とする請求項44に記載の方法。
【請求項50】
医学的処置を拡張するために利用されることを特徴とする請求項44に記載の方法。
【請求項51】
上記の印加する工程と減衰する工程が、超音波エネルギ伝達から生じる不都合な組織損傷を最小化することを特徴とする請求項44に記載の方法。
【請求項52】
状況内部において上記一時的キャビテーションは、超音波エネルギに関連する力から生じる泡の比較的急速な拡張及び激しい崩壊を含む請求項44に記載の方法。
【請求項53】
溶融されたガスを含む状況の内部で超音波エネルギを供給する方法であって、一時的キャビテーションを中に十分に誘導するように上記状況の内部に相対的に高いレベルの超音波エネルギを印加する工程を含み、
上記一時的キャビテーションは、相対的に短い期間に超音波エネルギに係る力によって、上記状況の内部に溶融されたガスを相対的に速く膨張し激しく崩壊することを含むことを特徴とする方法。
【請求項54】
相対的に高いレベルの超音波エネルギを印加する工程に続いて、上記状況の内部でより低いレベルの超音波エネルギを印加する工程を、更に含むことを特徴とする請求項53に記載の方法。
【請求項55】
診断のために利用されることを特徴とする請求項53に記載の方法。
【請求項56】
化学的処理のために採用されることを特徴とする請求項53に記載の方法。
【請求項57】
上記印加する工程が超音波エネルギ伝達から生じる熱を最小限にする傾向があることを特徴とする請求項56に記載の方法。
【請求項58】
上記印加する工程が所与の化学的結果をもたらすのに要求されるインプットエネルギを最小限にする傾向があることを特徴とする請求項56に記載の方法。
【請求項59】
医療的処置のために採用されることを特徴とする請求項53に記載の方法
【請求項60】
医療的処置を拡張するために利用されることを特徴とする請求項53に記載の方法。
【請求項61】
上記の印加する工程及び減衰する工程が、超音波エネルギ伝達から生じる有害な組織損傷を最小限にすることを特徴とする請求項53に記載の方法。
【請求項62】
上記の印加する工程が、超音波エネルギ伝達から生じる有害な組織損傷を最小限にすることを特徴とする請求項53に記載の方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22a】
【図22b】
【図22c】
【図22d】
【図22e】
【図22f】
【図23】
【図24A】

【図24B】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22a】
【図22b】
【図22c】
【図22d】
【図22e】
【図22f】
【図23】
【図24A】
【図24B】
【公開番号】特開2011−235173(P2011−235173A)
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【外国語出願】
【出願番号】特願2011−167254(P2011−167254)
【出願日】平成23年7月29日(2011.7.29)
【分割の表示】特願2006−507041(P2006−507041)の分割
【原出願日】平成16年3月11日(2004.3.11)
【出願人】(502049837)アボット・メディカル・オプティクス・インコーポレイテッド (50)
【氏名又は名称原語表記】ABBOTT MEDICAL OPTICS INC.
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願番号】特願2011−167254(P2011−167254)
【出願日】平成23年7月29日(2011.7.29)
【分割の表示】特願2006−507041(P2006−507041)の分割
【原出願日】平成16年3月11日(2004.3.11)
【出願人】(502049837)アボット・メディカル・オプティクス・インコーポレイテッド (50)
【氏名又は名称原語表記】ABBOTT MEDICAL OPTICS INC.
[ Back to top ]