
キャピラリ電気泳動装置
【課題】操作性と測定速度を向上させることができるキャピラリ電気泳動装置を提供する。
【解決手段】本発明によると、キャピラリ陰極端より離れた位置に試料容器の種類を識別するセンサが固定されている。センサによって移動ステージ上に配置された試料容器を識別することができるように、移動ステージを移動させることによって、センサを試料容器に近接させる。移動ステージには、少なくとも1対の試料容器を固定するための固定装置が設けられている。
【解決手段】本発明によると、キャピラリ陰極端より離れた位置に試料容器の種類を識別するセンサが固定されている。センサによって移動ステージ上に配置された試料容器を識別することができるように、移動ステージを移動させることによって、センサを試料容器に近接させる。移動ステージには、少なくとも1対の試料容器を固定するための固定装置が設けられている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、DNA、蛋白質などの試料を電気泳動により分離及び分析するキャピラリ電気泳動装置に関し、特に、溶液が収納された容器を搬送するオートサンプラ(試料容器自動搬送装置)に関する。
【背景技術】
【0002】
キャピラリ電気泳動装置では、分離媒体を充填したキャピラリ内に、試料を導入し、キャピラリの両端に高電圧を印加して、試料の成分の分離を行う。試料を収納するサンプルプレートには様々な形状のものがある。一般的には、9mmピッチ、8行×12列で配置された96個のウェルを備えるもの、4.5mmピッチ、16行×24列で配置された384個のウェルを備えるものが用いられる。
【0003】
特開2001-324474号公報には、サンプルプレートアセンブリの例が記載されている。このサンプルプレートアセンブリは、蒸発防止用のセプタが取り付けられたサンプルプレートを、上側のセプタホルダと下側のアダプタによって挟んだ構造である。
【0004】
特開2003-344357号公報には、サンプルプレートアセンブリをグリッパで掴む機構が示されている。グリッパによって、サンプルプレートアセンブリを直接掴むことにより、サンプルプレートアセンブリが保持される。
【0005】
近年、キャピラリ電気泳動装置における操作性と測定速度の向上させる要望がある。そのためには、サンプルプレートアセンブリをオートサンプラの移動ステージ上に配置する操作を簡単化する必要がある。
【0006】
オートサンプラは、試料溶液、バッファ溶液、試薬溶液、洗浄液、廃液、等の溶液を入れた各容器をキャピラリ陰極端に搬送する。キャピラリ陰極端には、キャピラリ電極が設けられている。キャピラリ電極は、キャピラリ端と電気泳動用電極が一体となった構造を有する。キャピラリ電極は、ロードヘッダに固定されている。一方、各容器は、オートサンプラの移動ステージ上に配置され、X-Y-Zの3次元方向に移動可能である。各容器は、オートサンプラによって、先ず、キャピラリ陰極端の下に搬送され、次に、上方に移動する。それによって、キャピラリ電極と溶液の接触を実現する。
【0007】
オートサンプラによって、サンプルプレートを搬送するとき、サンプルプレートの種類を認識する必要がある。従って、オートサンプラには、サンプルプレートの種類を識別するためのサンプルプレート識別機構が設けられる。特開2001-324474号公報に記載されたサンプルプレート識別機構では、アダプタの底面に検知板を設け、オートサンプラの移動ステージの上面にフォトインタラプタを設ける。サンプルプレートアセンブリを、移動ステージ上に配置すると、フォトインタラプタが検知板に係合する。フォトインタラプタからの光は、検知板によって遮断される。それによって、サンプルプレートの種類を検出することができる。フォトインタラプタと検知板の数を増加させることにより、識別可能なサンプルプレートの種類を増加させることができる。
【0008】
フォトインタラプタと検知板を用いるサンプルプレート識別機構では、サンプルプレートアセンブリが移動ステージ上に配置されている間は何時でも、サンプルプレートの種類を識別することができる利点がある。例えば、サンプル処理プログラムによってサンプルプレートの種類を解析し、解析した結果を操作者に提示することができる。もし、サンプル処理プログラムによって、サンプルプレートの種類を解析することができない場合には、オートサンプラの作動を停止し、誤った測定を防止することができる。
【0009】
しかしながら、フォトインタラプタと検知板を用いるサンプルプレート識別機構では、フォトインタラプタが移動ステージの上にて、露出されている。キャピラリ電気泳動装置では、バッファ溶液や洗浄液、廃液などの液体が入った容器を、操作者自身が移動ステージ上に設置する。そのため、不注意によりフォトインタラプタの上に、液体が落下することがある。また、フォトインタラプタには、電力を供給し、信号を送信するためのケーブルが接続されている。また、このケーブルは、移動ステージが移動する毎に、移動ステージと共に移動する。
【0010】
上述のように、キャピラリ電気泳動装置における操作性と測定速度の向上させる要望がある。そのためには、フォトインタラプタを移動ステージの上に設ける必要がないサンプルプレート識別機構の開発が求められていた。
【0011】
【特許文献1】特開2001-324474号公報
【特許文献2】特開2003-344357号公報
【発明の開示】
【発明が解決しようとする課題】
【0012】
本発明の目的は、操作性と測定速度を向上させることができるキャピラリ電気泳動装置を提供することにある。
【課題を解決するための手段】
【0013】
本発明によると、キャピラリ陰極端より離れた位置に試料容器の種類を識別するセンサが固定されている。センサによって移動ステージ上に配置された試料容器を識別することができるように、移動ステージを移動させることによって、センサを試料容器に近接させる。移動ステージには、少なくとも1対の試料容器を固定するための固定装置が設けられている。
【発明の効果】
【0014】
本発明によると、操作性と測定速度を向上させることができるキャピラリ電気泳動装置を提供することができる。
【発明を実施するための最良の形態】
【0015】
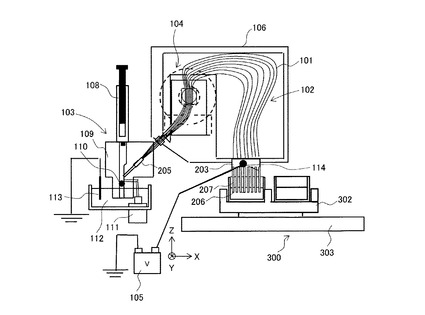
図1は本例のキャピラリ電気泳動装置の概要を示す。本例のキャピラリ電気泳動装置は、単数又は複数本のキャピラリ101を含むキャピラリアレイ102、キャピラリ101内に分離媒体に注入するためのポンプ機構103、キャピラリ101内のサンプルに光を照射し、サンプルの蛍光を検出するための光学系104、キャピラリ101に高電圧を加えるための高圧電源105、キャピラリ101を恒温に保つためのオーブン106、試料、溶液等が入った容器を搬送するためのオートサンプラ300を有する。
【0016】
キャピラリ101は交換可能な部材であり、測定手法を変更する場合や、キャピラリ101に破損や品質の劣化がみられたときに、交換する。キャピラリ101は、内径が数十から数百ミクロン、外径が数百ミクロンのガラス管で構成され、表面はポリイミドでコーティングされている。キャピラリ101の内部は、電気泳動時に試料のDNA、蛋白質等に泳動速度差を与えるための分離媒体が充填される。分離媒体には流動性と、非流動性の双方が存在するが、本例では流動性のポリマーを用いる。
【0017】
キャピラリ101の一端にはキャピラリヘッド205が設けられ、他端にはキャピラリ陰極端206が形成されている。キャピラリヘッド205は、キャピラリ101の端部を束ねたものであり、ポンプ機構103とキャピラリ101を接続させる機能を有する。キャピラリ陰極端206は、試料、溶液等に接触する。キャピラリ陰極端側では、キャピラリ101はロードヘッダ203によって固定されている。
【0018】
ロードヘッダ203には陰極電極114と金属製の管状部材であるキャピラリ電極207が装着されている。陰極電極114とキャピラリ電極207は導通している。キャピラリ陰極端206はキャピラリ電極207を貫通し、その先から突出している。
【0019】
光学系104は、照射系と検出系からなる。光学系104は、キャピラリ101のポリイミト゛被膜が除去されている部分、即ち、検出部に励起光を照射する機能を有する。検出系は、キャピラリ101の検出部内のサンプルからの蛍光を検出する機能を有する。検出系によって検出された光によって試料を分析する。
【0020】
ポンプ機構103は、シリンジ108、ブロック109、逆支弁110、ポリマー容器111及び陽極バッファ容器112を有する。キャピラリヘッド205をブロック109に接続することで、キャピラリ101とブロック109内の流路が接続される。シリンジ108の操作により、ポリマー容器111内のポリマーがブロック109内の流路を経由してキャピラリ101に充填され又は詰め替えられる。キャピラリ101中のポリマーの詰め替えは測定の性能を向上するために測定毎に実施される。
【0021】
陽極バッファ容器112には陽極電極113が配置されている。高圧電源105は、陽極電極113と陰極電極114の間に高圧電圧を印加する。
【0022】
オーブン106は、断熱材とヒータが取り付けられた温度制御板より、キャピラリアレイ102を平面状に挟み込んで、キャピラリの温度を一定に保つ。温度制御板にはフィードバック用の温度センサが取り付けられている。また、ロードヘッダ203をオーブンに固定することで、キャピラリヘッド205の先端を所望の位置に固定することができる。
【0023】
オートサンプラ300は、移動ステージ302を移動させるための3つの電動モータとリニアガイド303を備える。ここで、図示のように、キャピラリアレイ102が配置された平面に沿って、鉛直上方にZ軸、水平方向にX軸、キャピラリアレイ102が配置された平面の厚さ方向に、Y軸をとる。移動ステージは、上下方向(Z軸方向)、左右方向(X軸方向)、および奥行き方向(Y軸方向)の3軸方向に移動可能である。移動ステージ302は、バッファ容器、洗浄容器、廃液容器およびサンプルプレートを必要に応じてキャピラリ陰極端206まで搬送する。
【0024】
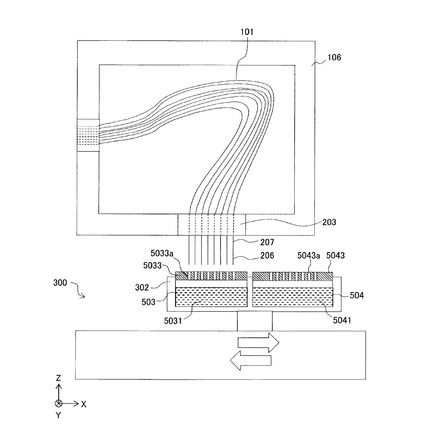
図2及び図3を参照して、オートサンプラの動作を説明する。図2は、キャピラリ電気泳動装置のキャピラリ101、オーブン106、オートサンプラ300が示されているが、光学系、ポンプ機構は省略している。オーブン106の下端にロードヘッダ203が装着されている。ロードヘッダ203にキャピラリ101が固定されている。ロードヘッダ203には、管状部材からなるキャピラリ電極207が装着されている。キャピラリ電極207をキャピラリ101が貫通し、下端からキャピラリ陰極端206が突出している。
【0025】
オートサンプラの移動ステージ302には、電気泳動用バッファ溶液5031を収納するバッファ容器503、及び、洗浄液5041を収納する洗浄容器504が配置されている。容器503及び容器504は、蒸発防止膜5033、5043によって覆われている。蒸発防止膜5033、5043には孔5033a、5043aが設けられている。
【0026】
尚、移動ステージ302には、試料が収納された試料容器及び廃液が収納された廃液容器が配置されているが、これらは、容器503及び容器504に並んで配置されているため、図示は省略されている。
【0027】
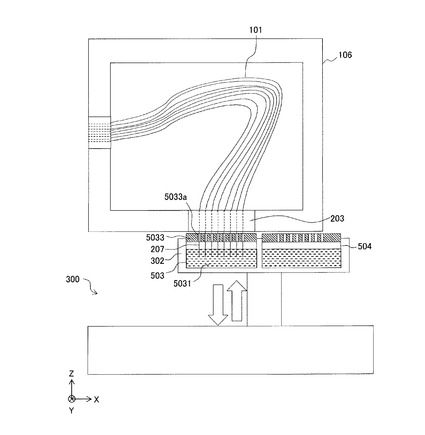
図2は、オートサンプラ300によって、バッファ容器503が、キャピラリ陰極端206の直下に搬送された状態を示す。即ち、移動ステージ302を、前後左右方向に移動させることにより、バッファ容器503が、キャピラリ陰極端206の直下に搬送される。次に、図3を参照して説明する。
【0028】
図3に示すように、移動ステージ302を、上方に移動させる。それによって、キャピラリ電極207が、バッファ容器503の蒸発防止膜5033の孔5033aを貫通し、バッファ溶液5031に浸かる。
【0029】
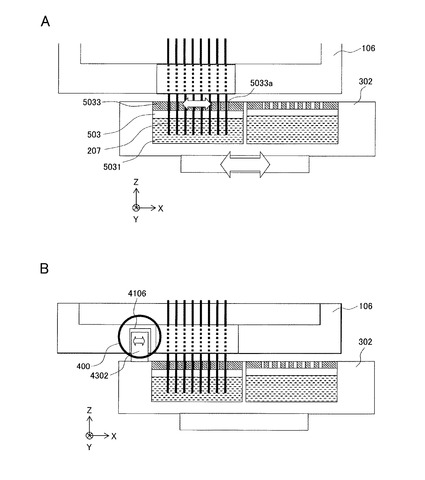
図4Aを参照して、従来技術のオートサンプラを説明する。図4Aは、従来の技術によるオートサンプラの主要部を示す。キャピラリ電極207が、バッファ容器503の蒸発防止膜5033の孔5033aを貫通し、バッファ溶液5031に漬かっている。バッファ容器503の密閉性を確保するために、蒸発防止膜5033の孔5033aの内径とキャピラリ電極207の外径の差は僅かである。
【0030】
キャピラリ電気泳動の分離性能を達成するには、キャピラリ内に充填されたゲル状分離媒体の乾燥を防止する必要がある。従って、キャピラリ陰極端は常に接液している必要がある。測定が終了すると、キャピラリ電気泳動装置の電源をオフにする。電源がオフの状態でも、キャピラリ内のゲル状分離媒体の乾燥を防止するため、キャピラリ電極207がバッファ溶液5031に漬かっている。即ち、キャピラリ電極207は、バッファ溶液5031に接触した状態で放置される。
【0031】
キャピラリ電気泳動装置には、様々な原因又は条件で外部から振動が印加される。例えば、装置の搬送、地震発生、等の原因がある。又、船上や車上などで、測定を行う場合にも発生する。外部からの振動は、キャピラリ電気泳動装置の電源がオンのときに付加される場合もあるが、電源がオフのときに付加される場合もある。
【0032】
ここで、キャピラリ電気泳動装置の電源がオフの場合に、キャピラリ電気泳動装置に、外部から振動が付与されたとする。このとき、オートサンプラを駆動するモータには電力が供給されていない。そのために、外部からの振動が付与されると、オートサンプラの移動ステージを、静止状態を維持することができない場合がある。
【0033】
移動ステージの静止状態を維持することができないと、移動ステージ上の容器が移動する。それによって、キャピラリ電極が蒸発防止膜の貫通孔と干渉し、蒸発防止膜を破損することがある。キャピラリ電極の本数が48本や96本のように多い場合、外部からの振動を複数のキャピラリ電極で分散することができる。そのため、1本のキャピラリ電極が受ける負荷は少ない。そのため、キャピラリ電極の破損を回避することができる。しかしながら、キャピラリ電極の本数が少ない場合には、1本のキャピラリ電極が受ける負荷は大きく、破損が生じる可能性が大きい。
【0034】
従来、この問題を解決するために、オートサンプラの駆動部に、すべりねじやボールねじなどのねじ送り機構が用いられている。特に、リード角が小さいねじの使用することにより、ねじ面の摩擦及びねじ軸方向の負荷を分散させ、移動ステージの静止状態を維持することができる。
【0035】
近年、キャピラリ電気泳動装置の小型化及び軽量化の必要性が高まっている。また、スループットの向上のために、搬送を高速化する必要性がある。そこで、本発明によると、オートサンプラに歯付きベルトやスチールベルト等のベルト駆動が用いられる。
【0036】
しかしながら、ベルト駆動は、外部からの振動の影響を受けやすく、オートサンプラの静止状態を維持することは困難である。そこで、本発明のオートサンプラによると、外部からの振動の影響を回避することができる構造が設けられている。
【0037】
図4Bを参照して、本発明によるのオートサンプラの例を説明する。本例のオートサンプラは、外部からの振動が付与されても、移動ステージの静止状態を維持するための固定機構400が設けられている。固定機構400は、オートサンプラの移動ステージ302に設けられた凸部4302と、オーブン106に設けられた凹部4106を有する。凸部4302は、凹部4106に係合することにより、移動ステージ302はオーブン106に対して固定される。即ち、電源がオフのときに外部からの振動が加わっても、移動ステージ302の静止状態を維持することができる。凸部4302は、ピンによって構成されてよい。凹部4106は、ピンを収納し、且つピンを保持する機構を有する。尚、オートサンプラの移動ステージ302に凹部を設け、オーブン106に凸部を設けてもよい。
【0038】
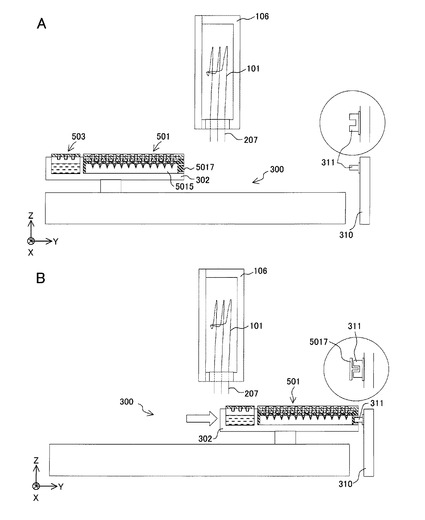
図5A、及び、図5Bを参照して、本発明によるオートサンプラの例を説明する。図5Aは、本発明によるオーブンとオートサンプラを、YZ平面で切断した断面構成を示す。移動ステージ302には、サンプルプレートアセンブリ501とバッファ容器503が配置されている。
【0039】
オートサンプラには、サンプルプレートの種類を検出するサンプルプレート識別機構が設けられている。サンプルプレート識別機構は、検知板とフォトインタラプタにより構成される。従来のサンプルプレート識別機構では、サンプルプレートアセンブリ501の底面に複数の検知板が設けられ、移動ステージ302の上面に複数のフォトインタラプタが配置されている。サンプルプレートアセンブリ501を、移動ステージ302上に配置すると、フォトインタラプタが検知板に係合する。
【0040】
フォトインタラプタは、典型的には、検知板を受け入れるための検知溝を有し、検知溝の両側に発光部と受光部が設けられている。発光部と受光部の間に検知板が挿入されると、発光部からの光が検知板によって遮光され、受光部によって受光されない。発光部と受光部の間に検知板が挿入されないと、発光部からの光が受光部によって受光される。1個のフォトインタラプタを用いた場合、フォトインタラプタが遮光の場合と透過の2つの場合が存在する。即ち、検知板を設けたサンプルプレートと、検知板を設けないサンプルプレートの2種類のサンプルプレートを識別することができる。
【0041】
3個のフォトインタラプタを用いた場合には、各フォトインタラプタについて、遮光の場合と透過の場合が存在する。従って、7種類(1種類は移動ステージにフォトインタラプタが設けられていない状態)のサンプルプレートを識別することができる。フォトインタラプタと検知板の数を増加させることにより、識別可能なサンプルプレートの種類を増加させることができる。
【0042】
従来のサンプルプレート識別機構では、フォトインタラプタが移動ステージ302の上に露出されている。キャピラリ電気泳動装置では、バッファ溶液や洗浄液、廃液などの液体が入った容器を、操作者自身が移動ステージ上に設置する。そのため、不注意によりフォトインタラプタの上に、液体が落下することがある。そのため、電気的なショートにより故障が起きる。
【0043】
フォトインタラプタには、電力を供給し、信号を送信するためのケーブルが接続されている。このケーブルは、移動ステージが移動する毎に、移動ステージと共に移動し、湾曲する。そのため、ケーブルが、切断する可能性がある。
【0044】
更に、オートサンプラによって、移動ステージを上方に移動して、移動ステージ上の容器をキャピラリ陰極端に近接させる。このとき、キャピラリ電極と移動ステージの上のフォトインタラプタが近接する。そのため、電気泳動時に、キャピラリ電極からの放電により、フォトインタラプタが故障する可能性がある。
【0045】
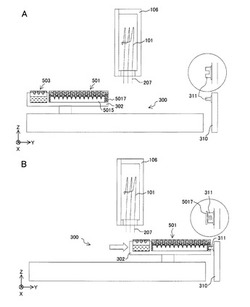
本例のサンプルプレート識別機構では、このような問題を解決するように構成されている。本例のサンプルプレート識別機構は、サンプルプレートアセンブリ501の側面に設けられた1又は複数の検知板5017と、キャピラリ電気泳動装置の固定部310に設けられた1又は複数のフォトインタラプタ311を有する。
【0046】
本例のサンプルプレート識別機構では、フォトインタラプタ311は移動ステージ302上に設けられていない。そのため、移動ステージ302に液体が落下しても、電気的な故障は起きない。従って、操作者自身が移動ステージ上に液体の入った容器を配置するキャピラリ電気泳動装置において、非常に有意義である。
【0047】
更に、フォトインタラプタ311は、固定部310に装着されている。そのため、移動ステージ302が移動しても、フォトインタラプタに接続されたケーブルが移動することはない。従って、ケーブルが、切断することはない。更に、本例によると、フォトインタラプタは、キャピラリ電極から離れた位置に配置されている。そのため、キャピラリ電極からの放電によるフォトインタラプタの故障を回避することができる。
【0048】
図5Bを参照して、本例のサンプルプレート識別機構に使用方法を説明する。サンプルプレートの種類を識別するには、サンプルプレートアセンブリ501がフォトインタラプタ311に近づくまで、移動ステージ302を移動させる必要がある。即ち、サンプルプレートアセンブリ501に設けられた検知板5017がフォトインタラプタ311に係合するように、移動ステージ302を移動させる。フォトインタラプタ311によって得られた情報は、装置の制御基板上又は装置の制御コンピュータ上の記憶素子に記録される。
【0049】
本例によると、移動ステージ302の上面には、フォトインタラプタを設ける必要がない。従って、移動ステージ302の上面は、穴のない平らな面として構成することができる、移動ステージ302上に液体が落下しても、ふき取ればよい。移動ステージ302の上面の縁に枠を設けてもよい。この場合、移動ステージの上面に落下した液体が、移動ステージの下に落下することが阻止される。従って、動作信頼性が高く、衛生的な移動ステージを構成することができる。
【0050】
尚、本例では、移動ステージ302を移動させ、サンプルプレートアセンブリ501の検知板5017を、フォトインタラプタ311に係合させる。従って、検知板5017が、フォトインタラプタ311へ進入する方向は、横方向である。従って、移動ステージ302の上面の縁に枠を設けた場合、サンプルプレートアセンブリ501の検知板5017が配置される部分には、枠を削除する必要がある。
【0051】
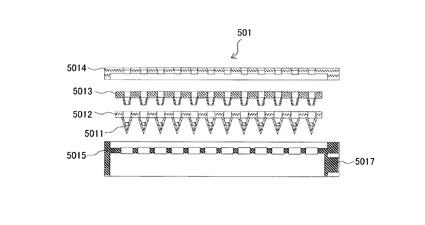
図6に示すように、本例のサンプルプレートアセンブリ501は、試料5011が入ったサンプルプレート5012に、蒸発防止膜5013を取り付け、アダプタ5015とクリップ5014で挟みこんだ構造を有する。本例のサンプルプレートアセンブリ501では、アダプタ5015の側面に、検知板5017が設けられている。
【0052】
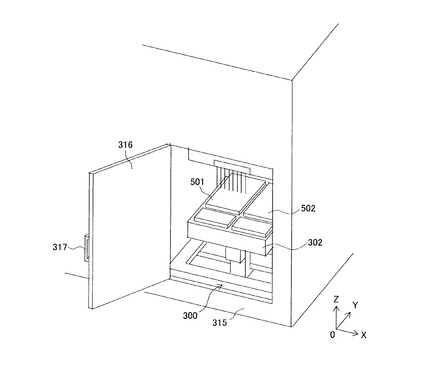
図7を参照して、サンプルプレートの種類の識別する方法の例を説明する。本例では、サンプルプレートの種類の認識は、常時行っているわけではなく、必要なときに行なう。例えば、移動ステージ上に、サンプルプレートアセンブリを配置したとき、又は、移動ステージ上のサンプルプレートアセンブリを他のサンプルプレートアセンブリと交換したときに、行なう。そこで、移動ステージ上にサンプルプレートアセンブリを配置したとき、又は、移動ステージ上のサンプルプレートアセンブリを交換したときに、自動的に、サンプルプレートの種類の認識するとよい。
【0053】
本例のオートサンプラ300は、ハウジング315内に収納されている。ハウジング315には、ドア316が設けられている。ドア316を経由しなければ、サンプルプレートアセンブリ501、502を出し入れすることはできない。本例によると、ドア316の開閉を検知する開閉検出機構317が設けられている。この開閉検出機構317は、リミットスイッチでもよいし、光センサであってよい。また、この開閉検出機構317は、ドア316が開けられたことを検出してもよいし、閉じられたことを検出してもよく、更に、ドア316が開けられ、且つ、閉じられたことを検出してもよい。
【0054】
開閉検出機構317からの検出信号は、キャピラリ電気泳動装置の制御部に送られ、更に、オートサンプラ300に送られる。それによって、移動ステージ302が移動する。サンプルプレートアセンブリの検知板がフォトインタラプタに係合すると、サンプルプレートの種類が識別される。こうして、本例では、移動ステージ上にサンプルプレートアセンブリを配置したとき、又は、移動ステージ上のサンプルプレートアセンブリを交換したときに、自動的に、サンプルプレートの種類が認識される。
【0055】
キャピラリ電気泳動装置の電源がオフのとき、開閉検出機構は作動しない。従って、キャピラリ電気泳動装置の電源がオフのときに、ドア316を開けて、移動ステージ302上にサンプルプレートアセンブリ501、502を配置し、又は、移動ステージ302上のサンプルプレートアセンブリ501、502を交換しても、サンプルプレートの種類は認識されない。
【0056】
そこで、本例では、キャピラリ電気泳動装置の電源をオンにすると、サンプルプレートの種類を識別する動作を行なうように構成する。それによって、キャピラリ電気泳動装置の電源がオフのときに、移動ステージ上にサンプルプレートアセンブリを配置してもよく、又は、移動ステージ上のサンプルプレートアセンブリを交換してもよい。
【0057】
サンプルプレート識別機構として、検知板とフォトインタラプタを用いる場合を説明したが、サンプルプレート識別機構として、他の構造も可能である。ここでは、RFID (Radio Frequency Identification)技術用いる例を説明する。
【0058】
サンプルプレートアセンブリ501の側面に、ラジオ波の送受信が可能なRFタグ(ICチップ)を設け、キャピラリ電気泳動装置の固定部310に、RFリーダライタ(送受信アンテナ)を設ける。サンプルプレートの種類を識別するには、RFタグがRFリーダライタに近づくまで、移動ステージ302を移動させる。即ち、RFリーダライタによってRFタグを読み取ることができるまで、移動ステージ302を移動させる。尚、RFタグとRFリーダライタのサイズを大きくすれば、RFタグとRFリーダライタが離れていても、RFリーダライタによってRFタグを読み取ることができる。この場合、移動ステージ上のサンプルプレートの種類を常時読み取ることができる。尚、RFタグは、サンプルプレートアセンブリ501を構成する部品のいずれかに装着される。RFタグを、アダプタ5015に装着してもよいが、サンプルプレート5012に装着してもよい。更に、特開2003−344357号公報に記載されているようにサンプルプレートアセンブリ501を構成する部品にバーコードを装着し、固定部310にバーコードリーダを装着してもよい。
【0059】
キャピラリ電極を容器から取り出すとき、容器が載っている移動ステージを下げる。このとき、キャピラリ電極と容器の蒸発防止膜の孔の間の摩擦力により、蒸発防止膜は、上方に持ち上げられる。それによって、蒸発防止膜が変形し、又は、蒸発防止膜と共に、サンプルプレートアセンブリが持ち上げられることがある。
【0060】
特開2001-324474公報には、蒸発防止膜を容器に押し付けるためのストリッパプレートを使用することが記載されている。ストリッパプレートによって、蒸発防止膜が持ち上げられることが防止され、キャピラリ電極を蒸発防止膜から取り外すことができる。
【0061】
しかしながら、ストリッパプレートを用いる場合、キャピラリ電極の根元と蒸発防止膜の間に、ストリッパプレートを配置するスペースが必要となる。そのため、キャピラリ電極の長さはストリッパプレートの配置に必要なスペースだけ、長くする必要がある。一方、電気泳動の分離性能の点から、キャピラリ電極は、短いほうがよい。なぜならば、キャピラリ電極は、オーブンの外に配置されるため、外気の温度の影響を受け易い。キャピラリ電極の温度が、外気の温度に起因して変動すると、分離性能にばらつきを生じる。
【0062】
特開2003-344357号公報には、サンプルプレートアセンブリをグリッパで掴む機構が示されている。グリッパによって、サンプルプレートアセンブリを直接掴むことにより、サンプルプレートアセンブリが保持される。しかしながら、グリッパを駆動するアクチュエータ及びモータが必要となり、装置の複雑化し、部品数が増加する。更に、移動ステージが移動すると、グリッパが共に3次元的に移動する。そのため、アクチュエータの配線が移動し、断線の危険性が高まる。
【0063】
そこで本発明によると、以下に説明するように、オートサンプラの移動ステージにサンプルプレートアセンブリを固定する機構を設ける。
【0064】
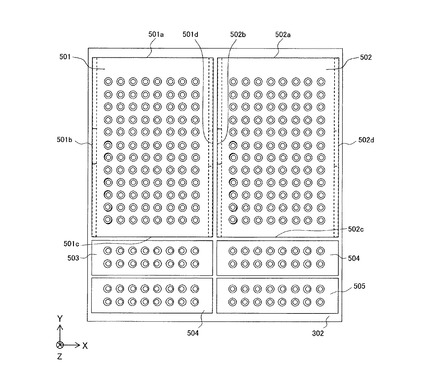
図8は、本例の移動ステージ302上に配置された2個のサンプルプレートアセンブリ501、502、バッファ容器503、2個の洗浄容器504、及び、廃液容器505の平面構成を示す。ここで、サンプルプレートアセンブリ501、502を、移動ステージ上に固定する固定機構の位置を考える。図示のように第1のサンプルプレートアセンブリ501は、4つの側面501a〜501dを有し、第2のサンプルプレートアセンブリ502は、4つの側面502a〜502dを有する。2つのサンプルプレートアセンブリ501、502の各々に、固定機構を設ける。2つのサンプルプレートアセンブリは同一であり、一方のサンプルプレートアセンブリ501について考察する。サンプルプレートアセンブリ501の固定機構は、4つの側面501a、501b、501c、501d、上面、及び、底面のいずれに設けるのが好ましいのかを考察する。サンプルプレートアセンブリの側面501aには、サンプルプレートの種類の識別するサンプルプレート識別機構が設けられる。上述の例では、検知板、又は、RFタグである。従って、サンプルプレートアセンブリの側面501aに、固定機構を設けることはできない。サンプルプレートアセンブリの内側の側面501dは、第2のサンプルプレートアセンブリ502に近接している。従って、サンプルプレートアセンブリの側面501dに、固定機構を設けるためのスペースの余裕はない。サンプルプレートアセンブリの側面501cは、バッファ容器503に近接している。サンプルプレートアセンブリの側面501cに、固定機構を設けるスペースの余裕はない。
【0065】
サンプルプレートアセンブリ501の上面について考察する。サンプルプレートアセンブリ501の上方には、キャピラリ電極が配置されている。従って、サンプルプレートアセンブリ501の上面に、固定機構を設けると、固定機構を操作するとき、キャピラリ電極が干渉する可能性がある。例えば、固定機構として、蓋のような構造の固定機構を想定する。この蓋を開閉するとき、蓋がキャピラリ電極と衝突する可能性がある。蓋がキャピラリ電極に衝突すると、蓋又はキャピラリ電極が損傷する。一方、サンプルプレートアセンブリ501の底面に、固定機構を設けると、操作が煩雑となる。
【0066】
そこで、本例では、第1のサンプルプレートアセンブリ501の外側の側面501bに固定機構を設ける。同様に、第2のサンプルプレートアセンブリ502の外側の側面502dに固定機構を設ける。こうして、固定機構を設ける位置が決まる。本例では、移動ステージ上に1対のサンプルプレートアセンブリ501、502を並べて配置する場合を考察したが、複数対のサンプルプレートアセンブリを配置する場合でも、同様である。次に、固定機構の構造について考察する。固定機構は、次の条件を有する。
【0067】
(1)サンプルプレートアセンブリは、移動ステージ上において、高精度にて位置決めがなされる必要がある。そのため、サンプルプレートアセンブリの前後方向(Y軸方向)及び左右方向(X軸方向)の移動を制限する機構が必要である。
【0068】
(2)サンプルプレートアセンブリを移動ステージ上に取り付けるとき、及び、移動ステージ上より取り外すとき、サンプルプレートアセンブリに対して前後方向(Y軸方向)及び左右方向(X軸方向)の負荷を与えてはならない。本発明によると、オートサンプラの駆動機構として、搬送の高速化が可能なベルト駆動を採用する。しかしながら、ベルト駆動は、外部からの負荷及び振動の影響を受け易い。特に、電源がオフのときに、外部からの負荷により、移動ステージが変位し易い。そこで、固定機構を操作するとき、負荷が発生しないような構造とすることにより、ベルト駆動を採用することができる。
【0069】
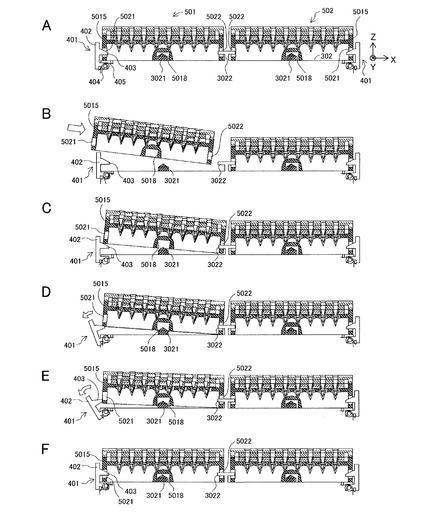
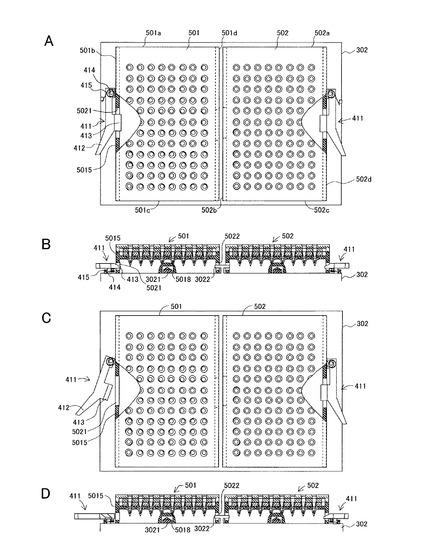
図9Aを参照して、本発明の移動ステージに設けられたサンプルプレートアセンブリの固定機構の第1の例を説明する。図9Aは、移動ステージ302、及び、その上に配置されたサンプルプレートアセンブリ501、502の断面構成を示す。
【0070】
本例によると、移動ステージ302の両端に、可動フック401が設けられ、移動ステージ302の中央には、固定フック3022が設けられている。更に、移動ステージ上には、位置決め用の凸部3021が設けられている。一方、サンプルプレートアセンブリ501の外側の側面には、孔5021が設けられ、サンプルプレートアセンブリ501の内側の側面には、孔5022が設けられている。更に、サンプルプレートアセンブリ501の底面には、位置決め用の凹部5018が設けられている。位置決め用の凸部3021と位置決め用の凹部5018の位置については、図12を参照して説明する。
【0071】
尚、サンプルプレートアセンブリ501、502は、図6を参照して説明したサンプルプレートアセンブリと同様な構造を有してよい。この場合、サンプルプレートアセンブリ501の側面の孔5021、5022は、アダプタ5015の側面に設けられる。また、サンプルプレートアセンブリ501の底面の位置決め用の凹部5018は、アダプタ5015の底面に設けられる。
【0072】
移動ステージ302の両端に設けられた可動フック401は同一構造を有する。ここでは、移動ステージ302の左側の可動フック401について説明する。可動フック401は、サンプルプレートアセンブリ501の外側に配置され、レバー部402と、内方に延びる爪403を有する。この爪403は、サンプルプレートアセンブリ501の外側の側面の孔5021に係合するように、構成されている。固定フック3022は、外方に、両側に延びる爪を有する。固定フック3022の爪は、サンプルプレートアセンブリ501の内側の側面の孔5022に係合するように、構成されている。更に、移動ステージ302上の凸部3021は、サンプルプレートアセンブリ501の底面の凹部5018に係合するように構成されている。こうして、移動ステージ302上の凸部3021をサンプルプレートアセンブリ501の底面の凹部5018に係合させることにより、サンプルプレートアセンブリ501を移動ステージ302上にて所定の位置に正確に位置決めすることができる。
【0073】
可動フック401は、回転軸404回りに回転可能である。回転軸404は、Y軸方向(紙面に垂直)に沿って配置されている。従って、可動フック401は、垂直な平面に沿って回転する。回転軸404の回りに、ネジリバネ405が巻かれている。ネジリバネ405の一端は、可動フック401に装着され、他端は、移動ステージ302の底面に装着されている。ネジリバネ405は、可動フック401に対して、閉じる方向の力を付与する。
【0074】
図9Bから図9Fを参照して、本例のサンプルプレートアセンブリを移動ステージに固定する方法を説明する。図9Bに示すように、先ず、サンプルプレートアセンブリ501を、外側の縁が上になり、内側の縁が下になるように傾斜させて、移動ステージ302の上方に配置する。図9Cに示すように、サンプルプレートアセンブリ501の内側の側面の孔5022を、固定フック3022の爪に係合させる。
【0075】
図9Dに示すように、ネジリバネ405の付勢力に抗して、可動フック401を(図9Dにおいて)反時計方向に回転させる。図9Eに示すように、サンプルプレートアセンブリの外側の縁を下方に押し込み、サンプルプレートアセンブリ501の底面の凹部5018を、移動ステージ302上の凸部3021に係合させる。こうして、サンプルプレートアセンブリ501の内側の側面の孔5022が固定フック3022の爪に係合し、サンプルプレートアセンブリ501の底面の凹部5018が移動ステージ302上の凸部3021に係合する。最後に、図9Fに示すように、サンプルプレートアセンブリ501が水平な状態で、移動ステージ302上に配置する。ネジリバネ405の付勢力を利用して、可動フック401を、垂直な平面に沿って(図9Fにおいて)時計方向に回転させる。それによって、可動フック401の爪403が、サンプルプレートアセンブリ501の外側の側面の孔5021に係合する。
【0076】
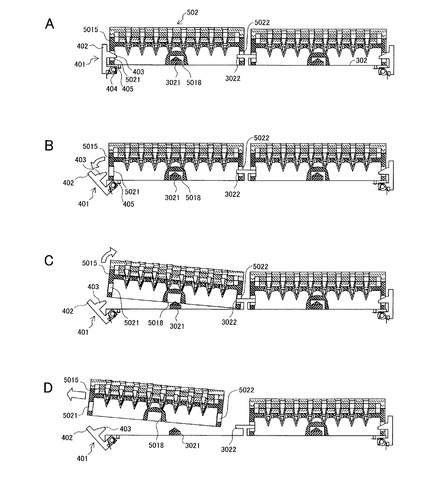
図10Aから図10Dを参照して、本例のサンプルプレートアセンブリを移動ステージから取り外す方法を説明する。図10Aは、図9Aと同様であり、サンプルプレートアセンブリ501が移動ステージ302に装着され、固定装置によって固定されている。図10Bに示すように、ネジリバネ405の付勢力に抗して、可動フック401を、垂直な平面に沿って反時計方向に回転させる。それによって、可動フック401の爪403が、サンプルプレートアセンブリ501の外側の側面の孔5021から外れる。図10Cに示すように、サンプルプレートアセンブリ501を、外側の縁を持ち上げ、サンプルプレートアセンブリ501を、傾斜させる。それによって、サンプルプレートアセンブリ501の底面の凹部5018が移動ステージ302上の凸部3021から外れる。このとき、サンプルプレートアセンブリ501の内側の側面の孔5022は、固定フック3022に係合している。最後に、図10Dに示すように、サンプルプレートアセンブリ501を全体的に持ち上げる。それによって、サンプルプレートアセンブリ501の内側の側面の孔5022が、固定フック3022の爪から外れる。
【0077】
図10Bの可動フック401を回転させる方向に対して、図10Cのサンプルプレートアセンブリ501を持ち上げる方向は、反対方向である。従って、図10Bの動作を一方の手で行い、図10Cの動作を他方の手で行い、最後に、サンプルプレートアセンブリ501を持ち挙げる動作は、両手で行なえばよい。
【0078】
本例の固定装置では、サンプルプレートアセンブリ501を移動ステージ302に装着するとき、及び、そこから取り外すとき、移動ステージ302に対して、上下方向の負荷を与えるが、前後左右方向の負荷を与えない。従って、本例では、オートサンプラの駆動機構として、搬送の高速化が可能なベルト駆動を採用することができる。
【0079】
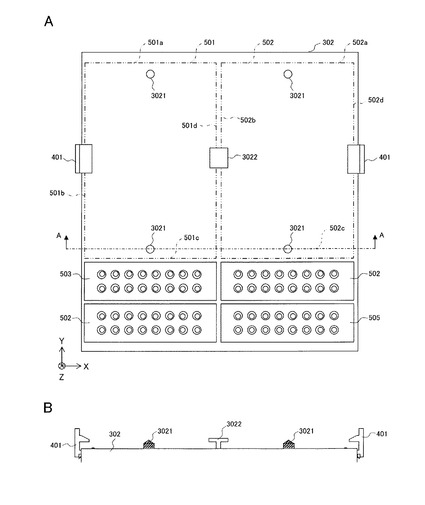
図11A及び図11Bを参照して、本例の移動ステージ302の上面の構造を説明する。図11Aは、本発明による移動ステージ302の上面構成を示し、図11Bは、移動ステージ302の断面構成を示す。図11Aの2点鎖線は、サンプルプレートアセンブリ501、502の位置を示す。図示のように、移動ステージ302の上面には、凸部3021が設けられている。凸部3021は、サンプルプレートアセンブリ501及び502の側面501a、501c及び側面502a、502cに近接して、且つ、側面501a、501c及び502a、502cより内側に配置されている。可動フック401及び固定フック3022は、サンプルプレートアセンブリの長手方向の略中央に配置されている。即ち、可動フック401は、サンプルプレートアセンブリ501、502の外側の側面501b、502dに沿って、長手方向(Y軸方向)の略中央に配置されている。固定フック3022は、サンプルプレートアセンブリ501、502の内側の側面501d、502bに沿って、長手方向(Y軸方向)の略中央に配置されている。可動フック401の爪は、所定の寸法を有し、同様に、固定フック3022の爪は、所定の寸法を有する。
【0080】
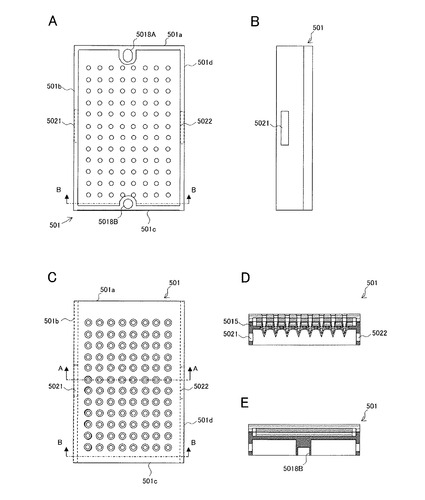
図12A、図12B、図12C、図12D及び図12Eを参照して、本例のサンプルプレートアセンブリの例を示す。図12Aは本例のサンプルプレートアセンブリの底面構成を示し、図12Bは本例のサンプルプレートアセンブリの側面構成を示し、図12Cは本例のサンプルプレートアセンブリの上面構成を示す。図12Dは、図12Cのサンプルプレートアセンブリを線A−Aで切断した断面構成を示し、図12Eは、図12Cのサンプルプレートアセンブリを線B−Bで切断した断面構成を示す。
【0081】
図12A及び図12Eに示すように、本例のサンプルプレートアセンブリ501の底面には、凹部5018A、5018Bが設けられている。凹部は、サンプルプレートアセンブリ501の側面501a及び側面501cに近接して、且つ、側面501a、501cより内側に配置されている。凹部は、図11Aに示した移動ステージの上面の凸部3021に対応した位置に配置されている。側面501aに近接して設けられた凹部5018Aは長穴であるが、側面501cに近接して設けられた凹部5018Bは円形穴である。
【0082】
図12B及び図12Dに示すように、本例のサンプルプレートアセンブリの側面には、孔5021、5022が設けられている。孔5021、5022は、サンプルプレートアセンブリ501の長手方向の略中央に配置されている。孔5021、5022は、図12Aに示した移動ステージの上面の可動フック401及び固定フック3022に対応した位置に配置されている。孔は、可動フック401の爪は及び固定フック3022の爪を受け入れることができる所定の寸法を有する。
【0083】
図13A及び図13Bを参照して、発明の移動ステージに設けられたサンプルプレートアセンブリの固定機構の第2の例を説明する。本例によると、移動ステージ302の両端に、可動フック411が設けられている。可動フック411は、サンプルプレートアセンブリ501、502の外側の側面501b、502dの位置に対応して配置されている。移動ステージ302の中央には、固定フック3022が設けられている。更に、移動ステージ上には、位置決め用の凸部3021が設けられている。一方、サンプルプレートアセンブリ501の外側の側面には、孔5021が設けられ、サンプルプレートアセンブリ501の内側の側面には、孔5022が設けられている。更に、サンプルプレートアセンブリ501の底面には、位置決め用の凹部5018設けられている。位置決め用の凸部3021と位置決め用の凹部5018の位置については、図12を参照して説明した。
【0084】
尚、サンプルプレートアセンブリ501、502は、図6を参照して説明したサンプルプレートアセンブリと同様な構造を有してよい。この場合、サンプルプレートアセンブリ501の側面の孔5021、5022は、アダプタ5015の外側の側面に設けられる。また、サンプルプレートアセンブリ501の底面の位置決め用の凹部5018は、アダプタ5015の底面に設けられる。
【0085】
移動ステージ302の両端に設けられた可動フック411は同一構造を有する。ここでは、移動ステージ302の左側の可動フック411について説明する。可動フック411は、サンプルプレートアセンブリ501の外側に配置され、レバー部412と、内方に延びる爪413を有する。この爪413は、サンプルプレートアセンブリ501の外側の側面の孔5021に係合するように、構成されている。固定フック3022は、外方に、両側に延びる爪を有する。固定フック3022の爪は、サンプルプレートアセンブリ501の内側の側面の孔5022に係合するように、構成されている。更に、移動ステージ302上の凸部3021は、サンプルプレートアセンブリ501の底面の凹部5018に係合するように構成されている。こうして、移動ステージ302上の凸部3021をサンプルプレートアセンブリ501の底面の凹部5018に係合させることにより、サンプルプレートアセンブリ501を移動ステージ302上にて所定の位置に正確に位置決めすることができる。
【0086】
可動フック411は、回転軸414回りに回転可能である。回転軸414は、Z軸方向(サンプルプレートアセンブリ501の厚さ方向)に沿って配置されている。従って、可動フック411は、水平な平面に沿って回転する。回転軸414の回りに、ネジリバネ415が巻かれている。ネジリバネ415の一端は、可動フック411に装着され、他端は、移動ステージ302の底面に装着されている。ネジリバネ415は、可動フック411に対して、閉じる方向の力を付与する。
【0087】
図13C及び図13Dを参照して、本例の固定装置の動作を説明する。サンプルプレートアセンブリを装着するとき、又は、取り外すとき、可動フック411のレバー部412を、ネジリバネ415の付勢力に抗して、水平な面に沿って、(図13Cにおいて)時計方向に回転させる。それによって、可動フック411の爪413は、サンプルプレートアセンブリ501の外側の側面に設けられた孔5021より外れる。図13C及び図13Dは、こうして、可動フック411の爪413が、サンプルプレートアセンブリ501の外側の側面の孔5021より外れた状態を示す。サンプルプレートアセンブリ501を固定装置によって固定するとき、可動フック411を、ネジリバネ415の付勢力を利用して、水平な面に沿って、(図13Cにおいて)反時計方向に回転させる。それによって、可動フック411の爪413は、サンプルプレートアセンブリ501の外側の側面の孔5021に係合する。本例によると、サンプルプレートアセンブリ501の外側の側面に設けられた孔5021の寸法は、可動フック411の爪413の寸法より、大きい。そのため、可動フック411の爪413が、回転軸414を中心とする弧を描いても、可動フック411の爪が、サンプルプレートアセンブリ501の外側の側面の孔5021の衝突することがない。
【0088】
本例では、可動フックを回転させる操作は、水平面に沿って行い、サンプルプレートアセンブリを取り外す操作は、垂直面に沿って行なう。即ち、両者の操作方向は、直交している。そのため、可動フックの回転操作と、サンプルプレートアセンブリの取り外し操作を、片手で同時に行なうことができる。そのため、利便性に優れている。
【0089】
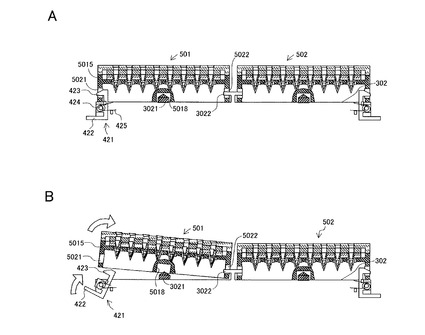
図14A、及び、図14Bを参照して、発明の移動ステージに設けられたサンプルプレートアセンブリの固定機構の第3の例を説明する。
【0090】
本例によると、移動ステージ302の両端に、可動フック421が設けられ、移動ステージ302の中央には、固定フック3022が設けられている。更に、移動ステージ上には、位置決め用の凸部3021が設けられている。一方、サンプルプレートアセンブリ501の外側の側面には、孔5021が設けられ、サンプルプレートアセンブリ501の内側の側面には、孔5022が設けられている。更に、サンプルプレートアセンブリ501の底面には、位置決め用の凹部5018設けられている。位置決め用の凸部3021と位置決め用の凹部5018の位置については、図12を参照して説明した。
【0091】
尚、サンプルプレートアセンブリ501、502は、図6を参照して説明したサンプルプレートアセンブリと同様な構造を有してよい。この場合、サンプルプレートアセンブリ501の側面の孔5021、5022は、アダプタ5015の外側の側面に設けられる。また、サンプルプレートアセンブリ501の底面の位置決め用の凹部5018は、アダプタ5015の底面に設けられる。
【0092】
移動ステージ302の両端に設けられた可動フック421は同一構造を有する。ここでは、移動ステージ302の左側の可動フック421について説明する。可動フック421は、サンプルプレートアセンブリ501の外側に配置され、外方に延びるレバー部422と、外方に延びる爪423を有する。この爪423は、サンプルプレートアセンブリ501の外側の側面の孔5021に係合するように、構成されている。固定フック3022は、外方に、両側に延びる爪を有する。固定フック3022の爪は、サンプルプレートアセンブリ501の内側の側面の孔5022に係合するように、構成されている。更に、移動ステージ302上の凸部3021は、サンプルプレートアセンブリ501の底面の凹部5018に係合するように構成されている。こうして、移動ステージ302上の凸部3021をサンプルプレートアセンブリ501の底面の凹部5018に係合させることにより、サンプルプレートアセンブリ501を移動ステージ302上にて所定の位置に正確に位置決めすることができる。
【0093】
可動フック421は、回転軸424回りに回転可能である。回転軸424は、Y軸方向(紙面に垂直)に沿って配置されている。従って、可動フック421は、垂直な平面に沿って回転する。回転軸424の回りに、ネジリバネ425が巻かれている。ネジリバネ425の一端は、可動フック421に装着され、他端は、移動ステージ302の底面に装着されている。ネジリバネ425は、可動フック421に対して、閉じる方向の力を付与する。
【0094】
本例の固定装置の動作を説明する。サンプルプレートアセンブリを取り外すとき、可動フック421を、ネジリバネ425の付勢力に抗して、水平な面に沿って、(図14Aにおいて)時計方向に回転させる。それによって、可動フック421の爪は、サンプルプレートアセンブリ501の外側の側面の孔5021より外れる。
【0095】
図14Bは、こうして、可動フック421の爪423が、サンプルプレートアセンブリ501の外側の側面の孔5021より外れた状態を示す。次に、サンプルプレートアセンブリ501を、外側の縁を持ち上げ、サンプルプレートアセンブリ501を、傾斜させる。それによって、サンプルプレートアセンブリ501の底面の凹部5018が移動ステージ上の凸部3021から外れる。最後に、サンプルプレートアセンブリ501を全体的に持ち上げる。それによって、サンプルプレートアセンブリ501の内側の側面の孔5022が、固定フック3022の爪から外れる。サンプルプレートアセンブリを装着するとき、逆の動作を行なえばよい。
【0096】
本例では、可動フックを回転させる操作は、垂直面に沿って行い、サンプルプレートアセンブリを取り外す操作は、垂直面に沿って行なう。即ち、両者の操作方向は、同一である。そのため、可動フックの回転操作と、サンプルプレートアセンブリの取り外し操作を、片手で同時に行なうことができる。そのため、利便性に優れている。
【0097】
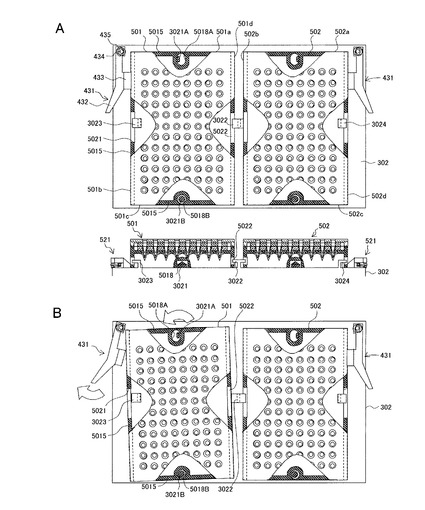
図15A、図15B、及び、図15Cを参照して、発明の移動ステージに設けられたサンプルプレートアセンブリの固定機構の第4の例を説明する。
【0098】
本例によると、移動ステージ302の両端に、可動フック431が設けられている。可動フック431は、サンプルプレートアセンブリ501、502の外側の側面501b、502dの位置に対応して配置されている。可動フック431は、サンプルプレートアセンブリ501の一方の側面501aに近接して設けてよい。
【0099】
移動ステージ302の中央には、固定フック3022、3023、3024が並んで設けられている。固定フック3022は、サンプルプレートアセンブリ501、502の内側の側面501d、502bに対応した位置に配置されている。固定フック3023、3024は、サンプルプレートアセンブリ501、502の外側の側面501b、502dに対応した位置に配置されている。
【0100】
第1のサンプルプレートアセンブリ501の外側の側面には、孔5021が設けられ、内側の側面には、孔5022が設けられている。固定フック3023は、サンプルプレートアセンブリ501の外側の側面の孔5021に係合し、固定フック3022は、サンプルプレートアセンブリ501の内側の側面の孔5022に係合している。第2のサンプルプレートアセンブリ502についても同様である。
【0101】
更に、移動ステージ上には、位置決め用の凸部3021A、3021Bが設けられている。位置決め用の凸部3021A、3021Bは、第1のサンプルプレートアセンブリ501の側面501a、501cの内側に配置されている。一方、第1のサンプルプレートアセンブリ501の底面には、位置決め用の凹部5018A、5018B設けられている。
【0102】
移動ステージ上の位置決め用の凸部3021A、3021Bは、サンプルプレートアセンブリ501の底面の位置決め用の凹部5018A、5018Bに、それぞれ係合している。第2のサンプルプレートアセンブリ502の底面に設けられた凹部と、それに対応して、移動ステージ上に設けられた位置決め用の凸部についても、同様である。
【0103】
尚、サンプルプレートアセンブリ501、502は、図6を参照して説明したサンプルプレートアセンブリと同様な構造を有してよい。この場合、サンプルプレートアセンブリ501の側面の孔5021、5022は、アダプタ5015の外側の側面に設けられる。また、サンプルプレートアセンブリ501の底面の位置決め用の凹部5018A、5018Bは、アダプタ5015の底面に設けられる。サンプルプレートアセンブリ502の側面の孔及び底面の位置決め用の凹部についても同様である。
【0104】
移動ステージ302の両端に設けられた可動フック431は同一構造を有する。ここでは、移動ステージ302の左側の可動フック431について説明する。可動フック431は、サンプルプレートアセンブリ501の外側に配置され、レバー部432と、内方に延びる押圧部433を有する。この押圧部433は、サンプルプレートアセンブリ501の外側の側面を押圧するように、構成されている。
【0105】
可動フック431は、回転軸434回りに回転可能である。回転軸434は、Z軸方向(サンプルプレートアセンブリ501の厚さ方向)に沿って配置されている。従って、可動フック431は、水平な平面に沿って回転する。回転軸434の回りに、ネジリバネ435が巻かれている。ネジリバネ435の一端は、可動フック431に装着され、他端は、移動ステージ302の底面に装着されている。ネジリバネ425は、可動レバーに、水平な平面に沿って(図15Aにおいて)反時計方向に回転させる力を付与する。
【0106】
以下では、2つのサンプルプレートアセンブリ501、502のうち、第1のサンプルプレートアセンブリ501について説明する。
【0107】
本例では、第1のサンプルプレートアセンブリ501に含まれるサンプルプレートアセンブリ501の外側の側面の孔5021の寸法は、固定フック3023の爪の寸法より十分大きい。サンプルプレートアセンブリ501の内側の側面の孔5022の寸法は、中央の固定フック3022の爪の寸法より十分大きい。
【0108】
サンプルプレートアセンブリ501の底面の凹部5018A、5018Bの内径の寸法は、移動ステージ上の凸部3021A、3021Bの外径より大きい。サンプルプレートアセンブリ501の底面の第1の凹部5018A(図15Aにて上側の凹部)と移動ステージ上の第1の凸部3021Aの間の隙間は、第2の凹部5018B(図15Aにて下側の凹部)と移動ステージ上の第2の凸部3021Bの間の隙間より、大きい。第1の凹部5018Aは、楕円形の長穴であってよい。移動ステージ上の第1の凸部3021Aの断面は、楕円形であってよい。
【0109】
本例では、移動ステージに形成された係合部と、サンプルプレートアセンブリ501に形成された係合部の間に、隙間がある。そのため、サンプルプレートアセンブリ501は、移動ステージ302上にて、移動ステージ302に対して僅かであるが移動可能である。移動ステージに形成された係合部とサンプルプレートアセンブリ501に形成された係合部の間の隙間が最も小さいのは、サンプルプレートアセンブリ501の底面の第2の凹部5018Bと、移動ステージ上の第2の凸部3021Bの間の隙間である。従って、サンプルプレートアセンブリ501は、移動ステージ302上にて、移動ステージ302上に設けられた第2の凸部3021B回りに、僅かな回転角であるが、回転可能である。
【0110】
図示のように、可動フック431の押圧部433は、サンプルプレートアセンブリ501の外側の側面を押圧している。従って、サンプルプレートアセンブリは、可動フック431から、X軸方向の押し付け力を受けている。そのため、サンプルプレートアセンブリは、サンプルプレートアセンブリ501の底面の第1の凹部5018Aの内面が移動ステージ上の第1の凸部3021Aに当接するまで、移動ステージ上にて、回転する。
【0111】
サンプルプレートアセンブリは、可動フック431から押し付け力を付与されても、それ以上移動できないときは、その状態で、保持される。
【0112】
本例の固定装置の動作を説明する。サンプルプレートアセンブリを取り外すとき、可動フック431のレバー部432を、ネジリバネ435の付勢力に抗して、水平な面に沿って、(図15Aにおいて)時計方向に回転させる。それによって、可動フック431の押圧部433は、サンプルプレートアセンブリ501の外側の側面より離れる。
【0113】
図15Bは、こうして、可動フック431の押圧部433が、サンプルプレートアセンブリ501の外側の側面より離れた状態を示す。次に、サンプルプレートアセンブリを、移動ステージ上に配置した状態で、(図15Bにおいて)反時計方向に回転させる。サンプルプレートアセンブリ501の底面の第1の凹部5018Aの内面が移動ステージ上の第1の凸部3021Bに当接するまで、サンプルプレートアセンブリを、移動ステージ上にて、回転させる。それによって、外側の固定フック3023の爪は、サンプルプレートアセンブリの外側の側面の孔5021より外れる。また、内側の固定フック3022の爪は、サンプルプレートアセンブリの内側の側面の孔5022より外れる。最後に、サンプルプレートアセンブリ501を全体的に持ち上げる。それによって、サンプルプレートアセンブリ501の底面の位置決め用の凹部5018A、5018Bは、ステージ上の位置決め用の凸部3021A、3021Bより、それぞれ外れる。サンプルプレートアセンブリを装着するとき、逆の動作を行なえばよい。
【0114】
本例では、移動ステージ上の凸部をサンプルプレートアセンブリ501の底面の凹部に係合させ、可動フック431によって、サンプルプレートアセンブリ501を押さえつけることにより、サンプルプレートアセンブリを移動ステージ上にて所定の位置に正確に位置決めすることができる。
【0115】
本例では、更に、サンプルプレートアセンブリを水平面に沿って回転するだけで、サンプルプレートアセンブリの取り付け及び取り外しができる。また、2つのサンプルプレートアセンブリでは、回転方向が反対であることを除けば、取り付け及び取り外し操作が同一である。そのため、片手で、2つのサンプルプレートアセンブリの取り付け及び取り外しができる。
【0116】
以上本発明の例を説明したが本発明は上述の例に限定されるものではなく特許請求の範囲に記載された発明の範囲にて様々な変更が可能であることは当業者によって容易に理解されよう。
【図面の簡単な説明】
【0117】
【図1】本発明によるキャピラリ電気泳動装置の概要を示す図である。
【図2】オートサンプラの動作を説明する説明図である。
【図3】オートサンプラの動作を説明する説明図である。
【図4】本発明によるオートサンプラの固定機構の例を説明する説明図である。
【図5】本発明によるオートサンプラのサンプルプレート識別機構の例を説明する説明図である。
【図6】本発明によるサンプルプレートアセンブリの構造の例を示す図である。
【図7】本発明によるオートサンプラのサンプルプレート識別機構の動作の例を説明する説明図である。
【図8】本発明によるオートサンプラの移動ステージに設けられたサンプルプレートアセンブリの固定機構の設置位置を説明する説明図である。
【図9】本発明によるオートサンプラの移動ステージに設けられたサンプルプレートアセンブリの固定機構の第1の例の構造及び動作を説明する説明図である。
【図10】本発明によるオートサンプラの移動ステージに設けられたサンプルプレートアセンブリの固定機構の第1の例の動作を説明する説明図である。
【図11】本発明によるオートサンプラの移動ステージに設けられた固定機構の例を説明する説明図である。
【図12】本発明によるサンプルプレートアセンブリに設けられた固定機構の例を説明する説明図である。
【図13】本発明によるオートサンプラの移動ステージに設けられたサンプルプレートアセンブリの固定機構の第2の例を説明する説明図である。
【図14】本発明によるオートサンプラの移動ステージに設けられたサンプルプレートアセンブリの固定機構の第3の例を説明する説明図である。
【図15】本発明によるオートサンプラの移動ステージに設けられたサンプルプレートアセンブリの固定機構の第4の例を説明する説明図である。
【符号の説明】
【0118】
101…キャピラリ、102…キャピラリアレイ、103…ポンプ機構、104…光学系、105…高圧電源、106…オーブン、108…シリンジ、109…ブロック、110…逆支弁、111…ポリマー容器、112…陽極バッファ容器、113…陽極電極、114…陰極電極、203…ロードヘッダ、205…キャピラリヘッド、206…キャピラリ陰極端、207…キャピラリ電極、
300…オートサンプラ、302…移動ステージ、303…リニアガイド、310…固定部、311…フォトインタラプタ、315…ハウジング、316…ドア、317…開閉検出機構、
400…固定機構、401…可動フック、402…レバー部、403…爪、404…回転軸、405…ネジリバネ、411…可動フック、412…レバー部、413…爪、414…回転軸、415…ネジリバネ、421…可動フック、422…レバー部、423…爪、424…回転軸、425…ネジリバネ、431…可動フック、432…レバー部、433…押圧部、434…回転軸、435…ネジリバネ、
501…サンプルプレートアセンブリ、501a〜501d…側面、502…サンプルプレートアセンブリ、502a〜502d…側面、503…バッファ容器、504…洗浄容器、505…廃液容器、
3021、3021A、3021B…凸部、3022、3023、3024…固定フック、4106…凹部、4302…凸部、
5011…試料、5012…サンプルプレート、5013…蒸発防止膜、5014…クリップ、5015…アダプタ、5017…検知板、5018、5018A、5018B…凹部、5021、5022…孔、5031…バッファ溶液、5033…蒸発防止膜、5033a…孔、5041…洗浄液、5043…蒸発防止膜、5043a…孔
【技術分野】
【0001】
本発明は、DNA、蛋白質などの試料を電気泳動により分離及び分析するキャピラリ電気泳動装置に関し、特に、溶液が収納された容器を搬送するオートサンプラ(試料容器自動搬送装置)に関する。
【背景技術】
【0002】
キャピラリ電気泳動装置では、分離媒体を充填したキャピラリ内に、試料を導入し、キャピラリの両端に高電圧を印加して、試料の成分の分離を行う。試料を収納するサンプルプレートには様々な形状のものがある。一般的には、9mmピッチ、8行×12列で配置された96個のウェルを備えるもの、4.5mmピッチ、16行×24列で配置された384個のウェルを備えるものが用いられる。
【0003】
特開2001-324474号公報には、サンプルプレートアセンブリの例が記載されている。このサンプルプレートアセンブリは、蒸発防止用のセプタが取り付けられたサンプルプレートを、上側のセプタホルダと下側のアダプタによって挟んだ構造である。
【0004】
特開2003-344357号公報には、サンプルプレートアセンブリをグリッパで掴む機構が示されている。グリッパによって、サンプルプレートアセンブリを直接掴むことにより、サンプルプレートアセンブリが保持される。
【0005】
近年、キャピラリ電気泳動装置における操作性と測定速度の向上させる要望がある。そのためには、サンプルプレートアセンブリをオートサンプラの移動ステージ上に配置する操作を簡単化する必要がある。
【0006】
オートサンプラは、試料溶液、バッファ溶液、試薬溶液、洗浄液、廃液、等の溶液を入れた各容器をキャピラリ陰極端に搬送する。キャピラリ陰極端には、キャピラリ電極が設けられている。キャピラリ電極は、キャピラリ端と電気泳動用電極が一体となった構造を有する。キャピラリ電極は、ロードヘッダに固定されている。一方、各容器は、オートサンプラの移動ステージ上に配置され、X-Y-Zの3次元方向に移動可能である。各容器は、オートサンプラによって、先ず、キャピラリ陰極端の下に搬送され、次に、上方に移動する。それによって、キャピラリ電極と溶液の接触を実現する。
【0007】
オートサンプラによって、サンプルプレートを搬送するとき、サンプルプレートの種類を認識する必要がある。従って、オートサンプラには、サンプルプレートの種類を識別するためのサンプルプレート識別機構が設けられる。特開2001-324474号公報に記載されたサンプルプレート識別機構では、アダプタの底面に検知板を設け、オートサンプラの移動ステージの上面にフォトインタラプタを設ける。サンプルプレートアセンブリを、移動ステージ上に配置すると、フォトインタラプタが検知板に係合する。フォトインタラプタからの光は、検知板によって遮断される。それによって、サンプルプレートの種類を検出することができる。フォトインタラプタと検知板の数を増加させることにより、識別可能なサンプルプレートの種類を増加させることができる。
【0008】
フォトインタラプタと検知板を用いるサンプルプレート識別機構では、サンプルプレートアセンブリが移動ステージ上に配置されている間は何時でも、サンプルプレートの種類を識別することができる利点がある。例えば、サンプル処理プログラムによってサンプルプレートの種類を解析し、解析した結果を操作者に提示することができる。もし、サンプル処理プログラムによって、サンプルプレートの種類を解析することができない場合には、オートサンプラの作動を停止し、誤った測定を防止することができる。
【0009】
しかしながら、フォトインタラプタと検知板を用いるサンプルプレート識別機構では、フォトインタラプタが移動ステージの上にて、露出されている。キャピラリ電気泳動装置では、バッファ溶液や洗浄液、廃液などの液体が入った容器を、操作者自身が移動ステージ上に設置する。そのため、不注意によりフォトインタラプタの上に、液体が落下することがある。また、フォトインタラプタには、電力を供給し、信号を送信するためのケーブルが接続されている。また、このケーブルは、移動ステージが移動する毎に、移動ステージと共に移動する。
【0010】
上述のように、キャピラリ電気泳動装置における操作性と測定速度の向上させる要望がある。そのためには、フォトインタラプタを移動ステージの上に設ける必要がないサンプルプレート識別機構の開発が求められていた。
【0011】
【特許文献1】特開2001-324474号公報
【特許文献2】特開2003-344357号公報
【発明の開示】
【発明が解決しようとする課題】
【0012】
本発明の目的は、操作性と測定速度を向上させることができるキャピラリ電気泳動装置を提供することにある。
【課題を解決するための手段】
【0013】
本発明によると、キャピラリ陰極端より離れた位置に試料容器の種類を識別するセンサが固定されている。センサによって移動ステージ上に配置された試料容器を識別することができるように、移動ステージを移動させることによって、センサを試料容器に近接させる。移動ステージには、少なくとも1対の試料容器を固定するための固定装置が設けられている。
【発明の効果】
【0014】
本発明によると、操作性と測定速度を向上させることができるキャピラリ電気泳動装置を提供することができる。
【発明を実施するための最良の形態】
【0015】
図1は本例のキャピラリ電気泳動装置の概要を示す。本例のキャピラリ電気泳動装置は、単数又は複数本のキャピラリ101を含むキャピラリアレイ102、キャピラリ101内に分離媒体に注入するためのポンプ機構103、キャピラリ101内のサンプルに光を照射し、サンプルの蛍光を検出するための光学系104、キャピラリ101に高電圧を加えるための高圧電源105、キャピラリ101を恒温に保つためのオーブン106、試料、溶液等が入った容器を搬送するためのオートサンプラ300を有する。
【0016】
キャピラリ101は交換可能な部材であり、測定手法を変更する場合や、キャピラリ101に破損や品質の劣化がみられたときに、交換する。キャピラリ101は、内径が数十から数百ミクロン、外径が数百ミクロンのガラス管で構成され、表面はポリイミドでコーティングされている。キャピラリ101の内部は、電気泳動時に試料のDNA、蛋白質等に泳動速度差を与えるための分離媒体が充填される。分離媒体には流動性と、非流動性の双方が存在するが、本例では流動性のポリマーを用いる。
【0017】
キャピラリ101の一端にはキャピラリヘッド205が設けられ、他端にはキャピラリ陰極端206が形成されている。キャピラリヘッド205は、キャピラリ101の端部を束ねたものであり、ポンプ機構103とキャピラリ101を接続させる機能を有する。キャピラリ陰極端206は、試料、溶液等に接触する。キャピラリ陰極端側では、キャピラリ101はロードヘッダ203によって固定されている。
【0018】
ロードヘッダ203には陰極電極114と金属製の管状部材であるキャピラリ電極207が装着されている。陰極電極114とキャピラリ電極207は導通している。キャピラリ陰極端206はキャピラリ電極207を貫通し、その先から突出している。
【0019】
光学系104は、照射系と検出系からなる。光学系104は、キャピラリ101のポリイミト゛被膜が除去されている部分、即ち、検出部に励起光を照射する機能を有する。検出系は、キャピラリ101の検出部内のサンプルからの蛍光を検出する機能を有する。検出系によって検出された光によって試料を分析する。
【0020】
ポンプ機構103は、シリンジ108、ブロック109、逆支弁110、ポリマー容器111及び陽極バッファ容器112を有する。キャピラリヘッド205をブロック109に接続することで、キャピラリ101とブロック109内の流路が接続される。シリンジ108の操作により、ポリマー容器111内のポリマーがブロック109内の流路を経由してキャピラリ101に充填され又は詰め替えられる。キャピラリ101中のポリマーの詰め替えは測定の性能を向上するために測定毎に実施される。
【0021】
陽極バッファ容器112には陽極電極113が配置されている。高圧電源105は、陽極電極113と陰極電極114の間に高圧電圧を印加する。
【0022】
オーブン106は、断熱材とヒータが取り付けられた温度制御板より、キャピラリアレイ102を平面状に挟み込んで、キャピラリの温度を一定に保つ。温度制御板にはフィードバック用の温度センサが取り付けられている。また、ロードヘッダ203をオーブンに固定することで、キャピラリヘッド205の先端を所望の位置に固定することができる。
【0023】
オートサンプラ300は、移動ステージ302を移動させるための3つの電動モータとリニアガイド303を備える。ここで、図示のように、キャピラリアレイ102が配置された平面に沿って、鉛直上方にZ軸、水平方向にX軸、キャピラリアレイ102が配置された平面の厚さ方向に、Y軸をとる。移動ステージは、上下方向(Z軸方向)、左右方向(X軸方向)、および奥行き方向(Y軸方向)の3軸方向に移動可能である。移動ステージ302は、バッファ容器、洗浄容器、廃液容器およびサンプルプレートを必要に応じてキャピラリ陰極端206まで搬送する。
【0024】
図2及び図3を参照して、オートサンプラの動作を説明する。図2は、キャピラリ電気泳動装置のキャピラリ101、オーブン106、オートサンプラ300が示されているが、光学系、ポンプ機構は省略している。オーブン106の下端にロードヘッダ203が装着されている。ロードヘッダ203にキャピラリ101が固定されている。ロードヘッダ203には、管状部材からなるキャピラリ電極207が装着されている。キャピラリ電極207をキャピラリ101が貫通し、下端からキャピラリ陰極端206が突出している。
【0025】
オートサンプラの移動ステージ302には、電気泳動用バッファ溶液5031を収納するバッファ容器503、及び、洗浄液5041を収納する洗浄容器504が配置されている。容器503及び容器504は、蒸発防止膜5033、5043によって覆われている。蒸発防止膜5033、5043には孔5033a、5043aが設けられている。
【0026】
尚、移動ステージ302には、試料が収納された試料容器及び廃液が収納された廃液容器が配置されているが、これらは、容器503及び容器504に並んで配置されているため、図示は省略されている。
【0027】
図2は、オートサンプラ300によって、バッファ容器503が、キャピラリ陰極端206の直下に搬送された状態を示す。即ち、移動ステージ302を、前後左右方向に移動させることにより、バッファ容器503が、キャピラリ陰極端206の直下に搬送される。次に、図3を参照して説明する。
【0028】
図3に示すように、移動ステージ302を、上方に移動させる。それによって、キャピラリ電極207が、バッファ容器503の蒸発防止膜5033の孔5033aを貫通し、バッファ溶液5031に浸かる。
【0029】
図4Aを参照して、従来技術のオートサンプラを説明する。図4Aは、従来の技術によるオートサンプラの主要部を示す。キャピラリ電極207が、バッファ容器503の蒸発防止膜5033の孔5033aを貫通し、バッファ溶液5031に漬かっている。バッファ容器503の密閉性を確保するために、蒸発防止膜5033の孔5033aの内径とキャピラリ電極207の外径の差は僅かである。
【0030】
キャピラリ電気泳動の分離性能を達成するには、キャピラリ内に充填されたゲル状分離媒体の乾燥を防止する必要がある。従って、キャピラリ陰極端は常に接液している必要がある。測定が終了すると、キャピラリ電気泳動装置の電源をオフにする。電源がオフの状態でも、キャピラリ内のゲル状分離媒体の乾燥を防止するため、キャピラリ電極207がバッファ溶液5031に漬かっている。即ち、キャピラリ電極207は、バッファ溶液5031に接触した状態で放置される。
【0031】
キャピラリ電気泳動装置には、様々な原因又は条件で外部から振動が印加される。例えば、装置の搬送、地震発生、等の原因がある。又、船上や車上などで、測定を行う場合にも発生する。外部からの振動は、キャピラリ電気泳動装置の電源がオンのときに付加される場合もあるが、電源がオフのときに付加される場合もある。
【0032】
ここで、キャピラリ電気泳動装置の電源がオフの場合に、キャピラリ電気泳動装置に、外部から振動が付与されたとする。このとき、オートサンプラを駆動するモータには電力が供給されていない。そのために、外部からの振動が付与されると、オートサンプラの移動ステージを、静止状態を維持することができない場合がある。
【0033】
移動ステージの静止状態を維持することができないと、移動ステージ上の容器が移動する。それによって、キャピラリ電極が蒸発防止膜の貫通孔と干渉し、蒸発防止膜を破損することがある。キャピラリ電極の本数が48本や96本のように多い場合、外部からの振動を複数のキャピラリ電極で分散することができる。そのため、1本のキャピラリ電極が受ける負荷は少ない。そのため、キャピラリ電極の破損を回避することができる。しかしながら、キャピラリ電極の本数が少ない場合には、1本のキャピラリ電極が受ける負荷は大きく、破損が生じる可能性が大きい。
【0034】
従来、この問題を解決するために、オートサンプラの駆動部に、すべりねじやボールねじなどのねじ送り機構が用いられている。特に、リード角が小さいねじの使用することにより、ねじ面の摩擦及びねじ軸方向の負荷を分散させ、移動ステージの静止状態を維持することができる。
【0035】
近年、キャピラリ電気泳動装置の小型化及び軽量化の必要性が高まっている。また、スループットの向上のために、搬送を高速化する必要性がある。そこで、本発明によると、オートサンプラに歯付きベルトやスチールベルト等のベルト駆動が用いられる。
【0036】
しかしながら、ベルト駆動は、外部からの振動の影響を受けやすく、オートサンプラの静止状態を維持することは困難である。そこで、本発明のオートサンプラによると、外部からの振動の影響を回避することができる構造が設けられている。
【0037】
図4Bを参照して、本発明によるのオートサンプラの例を説明する。本例のオートサンプラは、外部からの振動が付与されても、移動ステージの静止状態を維持するための固定機構400が設けられている。固定機構400は、オートサンプラの移動ステージ302に設けられた凸部4302と、オーブン106に設けられた凹部4106を有する。凸部4302は、凹部4106に係合することにより、移動ステージ302はオーブン106に対して固定される。即ち、電源がオフのときに外部からの振動が加わっても、移動ステージ302の静止状態を維持することができる。凸部4302は、ピンによって構成されてよい。凹部4106は、ピンを収納し、且つピンを保持する機構を有する。尚、オートサンプラの移動ステージ302に凹部を設け、オーブン106に凸部を設けてもよい。
【0038】
図5A、及び、図5Bを参照して、本発明によるオートサンプラの例を説明する。図5Aは、本発明によるオーブンとオートサンプラを、YZ平面で切断した断面構成を示す。移動ステージ302には、サンプルプレートアセンブリ501とバッファ容器503が配置されている。
【0039】
オートサンプラには、サンプルプレートの種類を検出するサンプルプレート識別機構が設けられている。サンプルプレート識別機構は、検知板とフォトインタラプタにより構成される。従来のサンプルプレート識別機構では、サンプルプレートアセンブリ501の底面に複数の検知板が設けられ、移動ステージ302の上面に複数のフォトインタラプタが配置されている。サンプルプレートアセンブリ501を、移動ステージ302上に配置すると、フォトインタラプタが検知板に係合する。
【0040】
フォトインタラプタは、典型的には、検知板を受け入れるための検知溝を有し、検知溝の両側に発光部と受光部が設けられている。発光部と受光部の間に検知板が挿入されると、発光部からの光が検知板によって遮光され、受光部によって受光されない。発光部と受光部の間に検知板が挿入されないと、発光部からの光が受光部によって受光される。1個のフォトインタラプタを用いた場合、フォトインタラプタが遮光の場合と透過の2つの場合が存在する。即ち、検知板を設けたサンプルプレートと、検知板を設けないサンプルプレートの2種類のサンプルプレートを識別することができる。
【0041】
3個のフォトインタラプタを用いた場合には、各フォトインタラプタについて、遮光の場合と透過の場合が存在する。従って、7種類(1種類は移動ステージにフォトインタラプタが設けられていない状態)のサンプルプレートを識別することができる。フォトインタラプタと検知板の数を増加させることにより、識別可能なサンプルプレートの種類を増加させることができる。
【0042】
従来のサンプルプレート識別機構では、フォトインタラプタが移動ステージ302の上に露出されている。キャピラリ電気泳動装置では、バッファ溶液や洗浄液、廃液などの液体が入った容器を、操作者自身が移動ステージ上に設置する。そのため、不注意によりフォトインタラプタの上に、液体が落下することがある。そのため、電気的なショートにより故障が起きる。
【0043】
フォトインタラプタには、電力を供給し、信号を送信するためのケーブルが接続されている。このケーブルは、移動ステージが移動する毎に、移動ステージと共に移動し、湾曲する。そのため、ケーブルが、切断する可能性がある。
【0044】
更に、オートサンプラによって、移動ステージを上方に移動して、移動ステージ上の容器をキャピラリ陰極端に近接させる。このとき、キャピラリ電極と移動ステージの上のフォトインタラプタが近接する。そのため、電気泳動時に、キャピラリ電極からの放電により、フォトインタラプタが故障する可能性がある。
【0045】
本例のサンプルプレート識別機構では、このような問題を解決するように構成されている。本例のサンプルプレート識別機構は、サンプルプレートアセンブリ501の側面に設けられた1又は複数の検知板5017と、キャピラリ電気泳動装置の固定部310に設けられた1又は複数のフォトインタラプタ311を有する。
【0046】
本例のサンプルプレート識別機構では、フォトインタラプタ311は移動ステージ302上に設けられていない。そのため、移動ステージ302に液体が落下しても、電気的な故障は起きない。従って、操作者自身が移動ステージ上に液体の入った容器を配置するキャピラリ電気泳動装置において、非常に有意義である。
【0047】
更に、フォトインタラプタ311は、固定部310に装着されている。そのため、移動ステージ302が移動しても、フォトインタラプタに接続されたケーブルが移動することはない。従って、ケーブルが、切断することはない。更に、本例によると、フォトインタラプタは、キャピラリ電極から離れた位置に配置されている。そのため、キャピラリ電極からの放電によるフォトインタラプタの故障を回避することができる。
【0048】
図5Bを参照して、本例のサンプルプレート識別機構に使用方法を説明する。サンプルプレートの種類を識別するには、サンプルプレートアセンブリ501がフォトインタラプタ311に近づくまで、移動ステージ302を移動させる必要がある。即ち、サンプルプレートアセンブリ501に設けられた検知板5017がフォトインタラプタ311に係合するように、移動ステージ302を移動させる。フォトインタラプタ311によって得られた情報は、装置の制御基板上又は装置の制御コンピュータ上の記憶素子に記録される。
【0049】
本例によると、移動ステージ302の上面には、フォトインタラプタを設ける必要がない。従って、移動ステージ302の上面は、穴のない平らな面として構成することができる、移動ステージ302上に液体が落下しても、ふき取ればよい。移動ステージ302の上面の縁に枠を設けてもよい。この場合、移動ステージの上面に落下した液体が、移動ステージの下に落下することが阻止される。従って、動作信頼性が高く、衛生的な移動ステージを構成することができる。
【0050】
尚、本例では、移動ステージ302を移動させ、サンプルプレートアセンブリ501の検知板5017を、フォトインタラプタ311に係合させる。従って、検知板5017が、フォトインタラプタ311へ進入する方向は、横方向である。従って、移動ステージ302の上面の縁に枠を設けた場合、サンプルプレートアセンブリ501の検知板5017が配置される部分には、枠を削除する必要がある。
【0051】
図6に示すように、本例のサンプルプレートアセンブリ501は、試料5011が入ったサンプルプレート5012に、蒸発防止膜5013を取り付け、アダプタ5015とクリップ5014で挟みこんだ構造を有する。本例のサンプルプレートアセンブリ501では、アダプタ5015の側面に、検知板5017が設けられている。
【0052】
図7を参照して、サンプルプレートの種類の識別する方法の例を説明する。本例では、サンプルプレートの種類の認識は、常時行っているわけではなく、必要なときに行なう。例えば、移動ステージ上に、サンプルプレートアセンブリを配置したとき、又は、移動ステージ上のサンプルプレートアセンブリを他のサンプルプレートアセンブリと交換したときに、行なう。そこで、移動ステージ上にサンプルプレートアセンブリを配置したとき、又は、移動ステージ上のサンプルプレートアセンブリを交換したときに、自動的に、サンプルプレートの種類の認識するとよい。
【0053】
本例のオートサンプラ300は、ハウジング315内に収納されている。ハウジング315には、ドア316が設けられている。ドア316を経由しなければ、サンプルプレートアセンブリ501、502を出し入れすることはできない。本例によると、ドア316の開閉を検知する開閉検出機構317が設けられている。この開閉検出機構317は、リミットスイッチでもよいし、光センサであってよい。また、この開閉検出機構317は、ドア316が開けられたことを検出してもよいし、閉じられたことを検出してもよく、更に、ドア316が開けられ、且つ、閉じられたことを検出してもよい。
【0054】
開閉検出機構317からの検出信号は、キャピラリ電気泳動装置の制御部に送られ、更に、オートサンプラ300に送られる。それによって、移動ステージ302が移動する。サンプルプレートアセンブリの検知板がフォトインタラプタに係合すると、サンプルプレートの種類が識別される。こうして、本例では、移動ステージ上にサンプルプレートアセンブリを配置したとき、又は、移動ステージ上のサンプルプレートアセンブリを交換したときに、自動的に、サンプルプレートの種類が認識される。
【0055】
キャピラリ電気泳動装置の電源がオフのとき、開閉検出機構は作動しない。従って、キャピラリ電気泳動装置の電源がオフのときに、ドア316を開けて、移動ステージ302上にサンプルプレートアセンブリ501、502を配置し、又は、移動ステージ302上のサンプルプレートアセンブリ501、502を交換しても、サンプルプレートの種類は認識されない。
【0056】
そこで、本例では、キャピラリ電気泳動装置の電源をオンにすると、サンプルプレートの種類を識別する動作を行なうように構成する。それによって、キャピラリ電気泳動装置の電源がオフのときに、移動ステージ上にサンプルプレートアセンブリを配置してもよく、又は、移動ステージ上のサンプルプレートアセンブリを交換してもよい。
【0057】
サンプルプレート識別機構として、検知板とフォトインタラプタを用いる場合を説明したが、サンプルプレート識別機構として、他の構造も可能である。ここでは、RFID (Radio Frequency Identification)技術用いる例を説明する。
【0058】
サンプルプレートアセンブリ501の側面に、ラジオ波の送受信が可能なRFタグ(ICチップ)を設け、キャピラリ電気泳動装置の固定部310に、RFリーダライタ(送受信アンテナ)を設ける。サンプルプレートの種類を識別するには、RFタグがRFリーダライタに近づくまで、移動ステージ302を移動させる。即ち、RFリーダライタによってRFタグを読み取ることができるまで、移動ステージ302を移動させる。尚、RFタグとRFリーダライタのサイズを大きくすれば、RFタグとRFリーダライタが離れていても、RFリーダライタによってRFタグを読み取ることができる。この場合、移動ステージ上のサンプルプレートの種類を常時読み取ることができる。尚、RFタグは、サンプルプレートアセンブリ501を構成する部品のいずれかに装着される。RFタグを、アダプタ5015に装着してもよいが、サンプルプレート5012に装着してもよい。更に、特開2003−344357号公報に記載されているようにサンプルプレートアセンブリ501を構成する部品にバーコードを装着し、固定部310にバーコードリーダを装着してもよい。
【0059】
キャピラリ電極を容器から取り出すとき、容器が載っている移動ステージを下げる。このとき、キャピラリ電極と容器の蒸発防止膜の孔の間の摩擦力により、蒸発防止膜は、上方に持ち上げられる。それによって、蒸発防止膜が変形し、又は、蒸発防止膜と共に、サンプルプレートアセンブリが持ち上げられることがある。
【0060】
特開2001-324474公報には、蒸発防止膜を容器に押し付けるためのストリッパプレートを使用することが記載されている。ストリッパプレートによって、蒸発防止膜が持ち上げられることが防止され、キャピラリ電極を蒸発防止膜から取り外すことができる。
【0061】
しかしながら、ストリッパプレートを用いる場合、キャピラリ電極の根元と蒸発防止膜の間に、ストリッパプレートを配置するスペースが必要となる。そのため、キャピラリ電極の長さはストリッパプレートの配置に必要なスペースだけ、長くする必要がある。一方、電気泳動の分離性能の点から、キャピラリ電極は、短いほうがよい。なぜならば、キャピラリ電極は、オーブンの外に配置されるため、外気の温度の影響を受け易い。キャピラリ電極の温度が、外気の温度に起因して変動すると、分離性能にばらつきを生じる。
【0062】
特開2003-344357号公報には、サンプルプレートアセンブリをグリッパで掴む機構が示されている。グリッパによって、サンプルプレートアセンブリを直接掴むことにより、サンプルプレートアセンブリが保持される。しかしながら、グリッパを駆動するアクチュエータ及びモータが必要となり、装置の複雑化し、部品数が増加する。更に、移動ステージが移動すると、グリッパが共に3次元的に移動する。そのため、アクチュエータの配線が移動し、断線の危険性が高まる。
【0063】
そこで本発明によると、以下に説明するように、オートサンプラの移動ステージにサンプルプレートアセンブリを固定する機構を設ける。
【0064】
図8は、本例の移動ステージ302上に配置された2個のサンプルプレートアセンブリ501、502、バッファ容器503、2個の洗浄容器504、及び、廃液容器505の平面構成を示す。ここで、サンプルプレートアセンブリ501、502を、移動ステージ上に固定する固定機構の位置を考える。図示のように第1のサンプルプレートアセンブリ501は、4つの側面501a〜501dを有し、第2のサンプルプレートアセンブリ502は、4つの側面502a〜502dを有する。2つのサンプルプレートアセンブリ501、502の各々に、固定機構を設ける。2つのサンプルプレートアセンブリは同一であり、一方のサンプルプレートアセンブリ501について考察する。サンプルプレートアセンブリ501の固定機構は、4つの側面501a、501b、501c、501d、上面、及び、底面のいずれに設けるのが好ましいのかを考察する。サンプルプレートアセンブリの側面501aには、サンプルプレートの種類の識別するサンプルプレート識別機構が設けられる。上述の例では、検知板、又は、RFタグである。従って、サンプルプレートアセンブリの側面501aに、固定機構を設けることはできない。サンプルプレートアセンブリの内側の側面501dは、第2のサンプルプレートアセンブリ502に近接している。従って、サンプルプレートアセンブリの側面501dに、固定機構を設けるためのスペースの余裕はない。サンプルプレートアセンブリの側面501cは、バッファ容器503に近接している。サンプルプレートアセンブリの側面501cに、固定機構を設けるスペースの余裕はない。
【0065】
サンプルプレートアセンブリ501の上面について考察する。サンプルプレートアセンブリ501の上方には、キャピラリ電極が配置されている。従って、サンプルプレートアセンブリ501の上面に、固定機構を設けると、固定機構を操作するとき、キャピラリ電極が干渉する可能性がある。例えば、固定機構として、蓋のような構造の固定機構を想定する。この蓋を開閉するとき、蓋がキャピラリ電極と衝突する可能性がある。蓋がキャピラリ電極に衝突すると、蓋又はキャピラリ電極が損傷する。一方、サンプルプレートアセンブリ501の底面に、固定機構を設けると、操作が煩雑となる。
【0066】
そこで、本例では、第1のサンプルプレートアセンブリ501の外側の側面501bに固定機構を設ける。同様に、第2のサンプルプレートアセンブリ502の外側の側面502dに固定機構を設ける。こうして、固定機構を設ける位置が決まる。本例では、移動ステージ上に1対のサンプルプレートアセンブリ501、502を並べて配置する場合を考察したが、複数対のサンプルプレートアセンブリを配置する場合でも、同様である。次に、固定機構の構造について考察する。固定機構は、次の条件を有する。
【0067】
(1)サンプルプレートアセンブリは、移動ステージ上において、高精度にて位置決めがなされる必要がある。そのため、サンプルプレートアセンブリの前後方向(Y軸方向)及び左右方向(X軸方向)の移動を制限する機構が必要である。
【0068】
(2)サンプルプレートアセンブリを移動ステージ上に取り付けるとき、及び、移動ステージ上より取り外すとき、サンプルプレートアセンブリに対して前後方向(Y軸方向)及び左右方向(X軸方向)の負荷を与えてはならない。本発明によると、オートサンプラの駆動機構として、搬送の高速化が可能なベルト駆動を採用する。しかしながら、ベルト駆動は、外部からの負荷及び振動の影響を受け易い。特に、電源がオフのときに、外部からの負荷により、移動ステージが変位し易い。そこで、固定機構を操作するとき、負荷が発生しないような構造とすることにより、ベルト駆動を採用することができる。
【0069】
図9Aを参照して、本発明の移動ステージに設けられたサンプルプレートアセンブリの固定機構の第1の例を説明する。図9Aは、移動ステージ302、及び、その上に配置されたサンプルプレートアセンブリ501、502の断面構成を示す。
【0070】
本例によると、移動ステージ302の両端に、可動フック401が設けられ、移動ステージ302の中央には、固定フック3022が設けられている。更に、移動ステージ上には、位置決め用の凸部3021が設けられている。一方、サンプルプレートアセンブリ501の外側の側面には、孔5021が設けられ、サンプルプレートアセンブリ501の内側の側面には、孔5022が設けられている。更に、サンプルプレートアセンブリ501の底面には、位置決め用の凹部5018が設けられている。位置決め用の凸部3021と位置決め用の凹部5018の位置については、図12を参照して説明する。
【0071】
尚、サンプルプレートアセンブリ501、502は、図6を参照して説明したサンプルプレートアセンブリと同様な構造を有してよい。この場合、サンプルプレートアセンブリ501の側面の孔5021、5022は、アダプタ5015の側面に設けられる。また、サンプルプレートアセンブリ501の底面の位置決め用の凹部5018は、アダプタ5015の底面に設けられる。
【0072】
移動ステージ302の両端に設けられた可動フック401は同一構造を有する。ここでは、移動ステージ302の左側の可動フック401について説明する。可動フック401は、サンプルプレートアセンブリ501の外側に配置され、レバー部402と、内方に延びる爪403を有する。この爪403は、サンプルプレートアセンブリ501の外側の側面の孔5021に係合するように、構成されている。固定フック3022は、外方に、両側に延びる爪を有する。固定フック3022の爪は、サンプルプレートアセンブリ501の内側の側面の孔5022に係合するように、構成されている。更に、移動ステージ302上の凸部3021は、サンプルプレートアセンブリ501の底面の凹部5018に係合するように構成されている。こうして、移動ステージ302上の凸部3021をサンプルプレートアセンブリ501の底面の凹部5018に係合させることにより、サンプルプレートアセンブリ501を移動ステージ302上にて所定の位置に正確に位置決めすることができる。
【0073】
可動フック401は、回転軸404回りに回転可能である。回転軸404は、Y軸方向(紙面に垂直)に沿って配置されている。従って、可動フック401は、垂直な平面に沿って回転する。回転軸404の回りに、ネジリバネ405が巻かれている。ネジリバネ405の一端は、可動フック401に装着され、他端は、移動ステージ302の底面に装着されている。ネジリバネ405は、可動フック401に対して、閉じる方向の力を付与する。
【0074】
図9Bから図9Fを参照して、本例のサンプルプレートアセンブリを移動ステージに固定する方法を説明する。図9Bに示すように、先ず、サンプルプレートアセンブリ501を、外側の縁が上になり、内側の縁が下になるように傾斜させて、移動ステージ302の上方に配置する。図9Cに示すように、サンプルプレートアセンブリ501の内側の側面の孔5022を、固定フック3022の爪に係合させる。
【0075】
図9Dに示すように、ネジリバネ405の付勢力に抗して、可動フック401を(図9Dにおいて)反時計方向に回転させる。図9Eに示すように、サンプルプレートアセンブリの外側の縁を下方に押し込み、サンプルプレートアセンブリ501の底面の凹部5018を、移動ステージ302上の凸部3021に係合させる。こうして、サンプルプレートアセンブリ501の内側の側面の孔5022が固定フック3022の爪に係合し、サンプルプレートアセンブリ501の底面の凹部5018が移動ステージ302上の凸部3021に係合する。最後に、図9Fに示すように、サンプルプレートアセンブリ501が水平な状態で、移動ステージ302上に配置する。ネジリバネ405の付勢力を利用して、可動フック401を、垂直な平面に沿って(図9Fにおいて)時計方向に回転させる。それによって、可動フック401の爪403が、サンプルプレートアセンブリ501の外側の側面の孔5021に係合する。
【0076】
図10Aから図10Dを参照して、本例のサンプルプレートアセンブリを移動ステージから取り外す方法を説明する。図10Aは、図9Aと同様であり、サンプルプレートアセンブリ501が移動ステージ302に装着され、固定装置によって固定されている。図10Bに示すように、ネジリバネ405の付勢力に抗して、可動フック401を、垂直な平面に沿って反時計方向に回転させる。それによって、可動フック401の爪403が、サンプルプレートアセンブリ501の外側の側面の孔5021から外れる。図10Cに示すように、サンプルプレートアセンブリ501を、外側の縁を持ち上げ、サンプルプレートアセンブリ501を、傾斜させる。それによって、サンプルプレートアセンブリ501の底面の凹部5018が移動ステージ302上の凸部3021から外れる。このとき、サンプルプレートアセンブリ501の内側の側面の孔5022は、固定フック3022に係合している。最後に、図10Dに示すように、サンプルプレートアセンブリ501を全体的に持ち上げる。それによって、サンプルプレートアセンブリ501の内側の側面の孔5022が、固定フック3022の爪から外れる。
【0077】
図10Bの可動フック401を回転させる方向に対して、図10Cのサンプルプレートアセンブリ501を持ち上げる方向は、反対方向である。従って、図10Bの動作を一方の手で行い、図10Cの動作を他方の手で行い、最後に、サンプルプレートアセンブリ501を持ち挙げる動作は、両手で行なえばよい。
【0078】
本例の固定装置では、サンプルプレートアセンブリ501を移動ステージ302に装着するとき、及び、そこから取り外すとき、移動ステージ302に対して、上下方向の負荷を与えるが、前後左右方向の負荷を与えない。従って、本例では、オートサンプラの駆動機構として、搬送の高速化が可能なベルト駆動を採用することができる。
【0079】
図11A及び図11Bを参照して、本例の移動ステージ302の上面の構造を説明する。図11Aは、本発明による移動ステージ302の上面構成を示し、図11Bは、移動ステージ302の断面構成を示す。図11Aの2点鎖線は、サンプルプレートアセンブリ501、502の位置を示す。図示のように、移動ステージ302の上面には、凸部3021が設けられている。凸部3021は、サンプルプレートアセンブリ501及び502の側面501a、501c及び側面502a、502cに近接して、且つ、側面501a、501c及び502a、502cより内側に配置されている。可動フック401及び固定フック3022は、サンプルプレートアセンブリの長手方向の略中央に配置されている。即ち、可動フック401は、サンプルプレートアセンブリ501、502の外側の側面501b、502dに沿って、長手方向(Y軸方向)の略中央に配置されている。固定フック3022は、サンプルプレートアセンブリ501、502の内側の側面501d、502bに沿って、長手方向(Y軸方向)の略中央に配置されている。可動フック401の爪は、所定の寸法を有し、同様に、固定フック3022の爪は、所定の寸法を有する。
【0080】
図12A、図12B、図12C、図12D及び図12Eを参照して、本例のサンプルプレートアセンブリの例を示す。図12Aは本例のサンプルプレートアセンブリの底面構成を示し、図12Bは本例のサンプルプレートアセンブリの側面構成を示し、図12Cは本例のサンプルプレートアセンブリの上面構成を示す。図12Dは、図12Cのサンプルプレートアセンブリを線A−Aで切断した断面構成を示し、図12Eは、図12Cのサンプルプレートアセンブリを線B−Bで切断した断面構成を示す。
【0081】
図12A及び図12Eに示すように、本例のサンプルプレートアセンブリ501の底面には、凹部5018A、5018Bが設けられている。凹部は、サンプルプレートアセンブリ501の側面501a及び側面501cに近接して、且つ、側面501a、501cより内側に配置されている。凹部は、図11Aに示した移動ステージの上面の凸部3021に対応した位置に配置されている。側面501aに近接して設けられた凹部5018Aは長穴であるが、側面501cに近接して設けられた凹部5018Bは円形穴である。
【0082】
図12B及び図12Dに示すように、本例のサンプルプレートアセンブリの側面には、孔5021、5022が設けられている。孔5021、5022は、サンプルプレートアセンブリ501の長手方向の略中央に配置されている。孔5021、5022は、図12Aに示した移動ステージの上面の可動フック401及び固定フック3022に対応した位置に配置されている。孔は、可動フック401の爪は及び固定フック3022の爪を受け入れることができる所定の寸法を有する。
【0083】
図13A及び図13Bを参照して、発明の移動ステージに設けられたサンプルプレートアセンブリの固定機構の第2の例を説明する。本例によると、移動ステージ302の両端に、可動フック411が設けられている。可動フック411は、サンプルプレートアセンブリ501、502の外側の側面501b、502dの位置に対応して配置されている。移動ステージ302の中央には、固定フック3022が設けられている。更に、移動ステージ上には、位置決め用の凸部3021が設けられている。一方、サンプルプレートアセンブリ501の外側の側面には、孔5021が設けられ、サンプルプレートアセンブリ501の内側の側面には、孔5022が設けられている。更に、サンプルプレートアセンブリ501の底面には、位置決め用の凹部5018設けられている。位置決め用の凸部3021と位置決め用の凹部5018の位置については、図12を参照して説明した。
【0084】
尚、サンプルプレートアセンブリ501、502は、図6を参照して説明したサンプルプレートアセンブリと同様な構造を有してよい。この場合、サンプルプレートアセンブリ501の側面の孔5021、5022は、アダプタ5015の外側の側面に設けられる。また、サンプルプレートアセンブリ501の底面の位置決め用の凹部5018は、アダプタ5015の底面に設けられる。
【0085】
移動ステージ302の両端に設けられた可動フック411は同一構造を有する。ここでは、移動ステージ302の左側の可動フック411について説明する。可動フック411は、サンプルプレートアセンブリ501の外側に配置され、レバー部412と、内方に延びる爪413を有する。この爪413は、サンプルプレートアセンブリ501の外側の側面の孔5021に係合するように、構成されている。固定フック3022は、外方に、両側に延びる爪を有する。固定フック3022の爪は、サンプルプレートアセンブリ501の内側の側面の孔5022に係合するように、構成されている。更に、移動ステージ302上の凸部3021は、サンプルプレートアセンブリ501の底面の凹部5018に係合するように構成されている。こうして、移動ステージ302上の凸部3021をサンプルプレートアセンブリ501の底面の凹部5018に係合させることにより、サンプルプレートアセンブリ501を移動ステージ302上にて所定の位置に正確に位置決めすることができる。
【0086】
可動フック411は、回転軸414回りに回転可能である。回転軸414は、Z軸方向(サンプルプレートアセンブリ501の厚さ方向)に沿って配置されている。従って、可動フック411は、水平な平面に沿って回転する。回転軸414の回りに、ネジリバネ415が巻かれている。ネジリバネ415の一端は、可動フック411に装着され、他端は、移動ステージ302の底面に装着されている。ネジリバネ415は、可動フック411に対して、閉じる方向の力を付与する。
【0087】
図13C及び図13Dを参照して、本例の固定装置の動作を説明する。サンプルプレートアセンブリを装着するとき、又は、取り外すとき、可動フック411のレバー部412を、ネジリバネ415の付勢力に抗して、水平な面に沿って、(図13Cにおいて)時計方向に回転させる。それによって、可動フック411の爪413は、サンプルプレートアセンブリ501の外側の側面に設けられた孔5021より外れる。図13C及び図13Dは、こうして、可動フック411の爪413が、サンプルプレートアセンブリ501の外側の側面の孔5021より外れた状態を示す。サンプルプレートアセンブリ501を固定装置によって固定するとき、可動フック411を、ネジリバネ415の付勢力を利用して、水平な面に沿って、(図13Cにおいて)反時計方向に回転させる。それによって、可動フック411の爪413は、サンプルプレートアセンブリ501の外側の側面の孔5021に係合する。本例によると、サンプルプレートアセンブリ501の外側の側面に設けられた孔5021の寸法は、可動フック411の爪413の寸法より、大きい。そのため、可動フック411の爪413が、回転軸414を中心とする弧を描いても、可動フック411の爪が、サンプルプレートアセンブリ501の外側の側面の孔5021の衝突することがない。
【0088】
本例では、可動フックを回転させる操作は、水平面に沿って行い、サンプルプレートアセンブリを取り外す操作は、垂直面に沿って行なう。即ち、両者の操作方向は、直交している。そのため、可動フックの回転操作と、サンプルプレートアセンブリの取り外し操作を、片手で同時に行なうことができる。そのため、利便性に優れている。
【0089】
図14A、及び、図14Bを参照して、発明の移動ステージに設けられたサンプルプレートアセンブリの固定機構の第3の例を説明する。
【0090】
本例によると、移動ステージ302の両端に、可動フック421が設けられ、移動ステージ302の中央には、固定フック3022が設けられている。更に、移動ステージ上には、位置決め用の凸部3021が設けられている。一方、サンプルプレートアセンブリ501の外側の側面には、孔5021が設けられ、サンプルプレートアセンブリ501の内側の側面には、孔5022が設けられている。更に、サンプルプレートアセンブリ501の底面には、位置決め用の凹部5018設けられている。位置決め用の凸部3021と位置決め用の凹部5018の位置については、図12を参照して説明した。
【0091】
尚、サンプルプレートアセンブリ501、502は、図6を参照して説明したサンプルプレートアセンブリと同様な構造を有してよい。この場合、サンプルプレートアセンブリ501の側面の孔5021、5022は、アダプタ5015の外側の側面に設けられる。また、サンプルプレートアセンブリ501の底面の位置決め用の凹部5018は、アダプタ5015の底面に設けられる。
【0092】
移動ステージ302の両端に設けられた可動フック421は同一構造を有する。ここでは、移動ステージ302の左側の可動フック421について説明する。可動フック421は、サンプルプレートアセンブリ501の外側に配置され、外方に延びるレバー部422と、外方に延びる爪423を有する。この爪423は、サンプルプレートアセンブリ501の外側の側面の孔5021に係合するように、構成されている。固定フック3022は、外方に、両側に延びる爪を有する。固定フック3022の爪は、サンプルプレートアセンブリ501の内側の側面の孔5022に係合するように、構成されている。更に、移動ステージ302上の凸部3021は、サンプルプレートアセンブリ501の底面の凹部5018に係合するように構成されている。こうして、移動ステージ302上の凸部3021をサンプルプレートアセンブリ501の底面の凹部5018に係合させることにより、サンプルプレートアセンブリ501を移動ステージ302上にて所定の位置に正確に位置決めすることができる。
【0093】
可動フック421は、回転軸424回りに回転可能である。回転軸424は、Y軸方向(紙面に垂直)に沿って配置されている。従って、可動フック421は、垂直な平面に沿って回転する。回転軸424の回りに、ネジリバネ425が巻かれている。ネジリバネ425の一端は、可動フック421に装着され、他端は、移動ステージ302の底面に装着されている。ネジリバネ425は、可動フック421に対して、閉じる方向の力を付与する。
【0094】
本例の固定装置の動作を説明する。サンプルプレートアセンブリを取り外すとき、可動フック421を、ネジリバネ425の付勢力に抗して、水平な面に沿って、(図14Aにおいて)時計方向に回転させる。それによって、可動フック421の爪は、サンプルプレートアセンブリ501の外側の側面の孔5021より外れる。
【0095】
図14Bは、こうして、可動フック421の爪423が、サンプルプレートアセンブリ501の外側の側面の孔5021より外れた状態を示す。次に、サンプルプレートアセンブリ501を、外側の縁を持ち上げ、サンプルプレートアセンブリ501を、傾斜させる。それによって、サンプルプレートアセンブリ501の底面の凹部5018が移動ステージ上の凸部3021から外れる。最後に、サンプルプレートアセンブリ501を全体的に持ち上げる。それによって、サンプルプレートアセンブリ501の内側の側面の孔5022が、固定フック3022の爪から外れる。サンプルプレートアセンブリを装着するとき、逆の動作を行なえばよい。
【0096】
本例では、可動フックを回転させる操作は、垂直面に沿って行い、サンプルプレートアセンブリを取り外す操作は、垂直面に沿って行なう。即ち、両者の操作方向は、同一である。そのため、可動フックの回転操作と、サンプルプレートアセンブリの取り外し操作を、片手で同時に行なうことができる。そのため、利便性に優れている。
【0097】
図15A、図15B、及び、図15Cを参照して、発明の移動ステージに設けられたサンプルプレートアセンブリの固定機構の第4の例を説明する。
【0098】
本例によると、移動ステージ302の両端に、可動フック431が設けられている。可動フック431は、サンプルプレートアセンブリ501、502の外側の側面501b、502dの位置に対応して配置されている。可動フック431は、サンプルプレートアセンブリ501の一方の側面501aに近接して設けてよい。
【0099】
移動ステージ302の中央には、固定フック3022、3023、3024が並んで設けられている。固定フック3022は、サンプルプレートアセンブリ501、502の内側の側面501d、502bに対応した位置に配置されている。固定フック3023、3024は、サンプルプレートアセンブリ501、502の外側の側面501b、502dに対応した位置に配置されている。
【0100】
第1のサンプルプレートアセンブリ501の外側の側面には、孔5021が設けられ、内側の側面には、孔5022が設けられている。固定フック3023は、サンプルプレートアセンブリ501の外側の側面の孔5021に係合し、固定フック3022は、サンプルプレートアセンブリ501の内側の側面の孔5022に係合している。第2のサンプルプレートアセンブリ502についても同様である。
【0101】
更に、移動ステージ上には、位置決め用の凸部3021A、3021Bが設けられている。位置決め用の凸部3021A、3021Bは、第1のサンプルプレートアセンブリ501の側面501a、501cの内側に配置されている。一方、第1のサンプルプレートアセンブリ501の底面には、位置決め用の凹部5018A、5018B設けられている。
【0102】
移動ステージ上の位置決め用の凸部3021A、3021Bは、サンプルプレートアセンブリ501の底面の位置決め用の凹部5018A、5018Bに、それぞれ係合している。第2のサンプルプレートアセンブリ502の底面に設けられた凹部と、それに対応して、移動ステージ上に設けられた位置決め用の凸部についても、同様である。
【0103】
尚、サンプルプレートアセンブリ501、502は、図6を参照して説明したサンプルプレートアセンブリと同様な構造を有してよい。この場合、サンプルプレートアセンブリ501の側面の孔5021、5022は、アダプタ5015の外側の側面に設けられる。また、サンプルプレートアセンブリ501の底面の位置決め用の凹部5018A、5018Bは、アダプタ5015の底面に設けられる。サンプルプレートアセンブリ502の側面の孔及び底面の位置決め用の凹部についても同様である。
【0104】
移動ステージ302の両端に設けられた可動フック431は同一構造を有する。ここでは、移動ステージ302の左側の可動フック431について説明する。可動フック431は、サンプルプレートアセンブリ501の外側に配置され、レバー部432と、内方に延びる押圧部433を有する。この押圧部433は、サンプルプレートアセンブリ501の外側の側面を押圧するように、構成されている。
【0105】
可動フック431は、回転軸434回りに回転可能である。回転軸434は、Z軸方向(サンプルプレートアセンブリ501の厚さ方向)に沿って配置されている。従って、可動フック431は、水平な平面に沿って回転する。回転軸434の回りに、ネジリバネ435が巻かれている。ネジリバネ435の一端は、可動フック431に装着され、他端は、移動ステージ302の底面に装着されている。ネジリバネ425は、可動レバーに、水平な平面に沿って(図15Aにおいて)反時計方向に回転させる力を付与する。
【0106】
以下では、2つのサンプルプレートアセンブリ501、502のうち、第1のサンプルプレートアセンブリ501について説明する。
【0107】
本例では、第1のサンプルプレートアセンブリ501に含まれるサンプルプレートアセンブリ501の外側の側面の孔5021の寸法は、固定フック3023の爪の寸法より十分大きい。サンプルプレートアセンブリ501の内側の側面の孔5022の寸法は、中央の固定フック3022の爪の寸法より十分大きい。
【0108】
サンプルプレートアセンブリ501の底面の凹部5018A、5018Bの内径の寸法は、移動ステージ上の凸部3021A、3021Bの外径より大きい。サンプルプレートアセンブリ501の底面の第1の凹部5018A(図15Aにて上側の凹部)と移動ステージ上の第1の凸部3021Aの間の隙間は、第2の凹部5018B(図15Aにて下側の凹部)と移動ステージ上の第2の凸部3021Bの間の隙間より、大きい。第1の凹部5018Aは、楕円形の長穴であってよい。移動ステージ上の第1の凸部3021Aの断面は、楕円形であってよい。
【0109】
本例では、移動ステージに形成された係合部と、サンプルプレートアセンブリ501に形成された係合部の間に、隙間がある。そのため、サンプルプレートアセンブリ501は、移動ステージ302上にて、移動ステージ302に対して僅かであるが移動可能である。移動ステージに形成された係合部とサンプルプレートアセンブリ501に形成された係合部の間の隙間が最も小さいのは、サンプルプレートアセンブリ501の底面の第2の凹部5018Bと、移動ステージ上の第2の凸部3021Bの間の隙間である。従って、サンプルプレートアセンブリ501は、移動ステージ302上にて、移動ステージ302上に設けられた第2の凸部3021B回りに、僅かな回転角であるが、回転可能である。
【0110】
図示のように、可動フック431の押圧部433は、サンプルプレートアセンブリ501の外側の側面を押圧している。従って、サンプルプレートアセンブリは、可動フック431から、X軸方向の押し付け力を受けている。そのため、サンプルプレートアセンブリは、サンプルプレートアセンブリ501の底面の第1の凹部5018Aの内面が移動ステージ上の第1の凸部3021Aに当接するまで、移動ステージ上にて、回転する。
【0111】
サンプルプレートアセンブリは、可動フック431から押し付け力を付与されても、それ以上移動できないときは、その状態で、保持される。
【0112】
本例の固定装置の動作を説明する。サンプルプレートアセンブリを取り外すとき、可動フック431のレバー部432を、ネジリバネ435の付勢力に抗して、水平な面に沿って、(図15Aにおいて)時計方向に回転させる。それによって、可動フック431の押圧部433は、サンプルプレートアセンブリ501の外側の側面より離れる。
【0113】
図15Bは、こうして、可動フック431の押圧部433が、サンプルプレートアセンブリ501の外側の側面より離れた状態を示す。次に、サンプルプレートアセンブリを、移動ステージ上に配置した状態で、(図15Bにおいて)反時計方向に回転させる。サンプルプレートアセンブリ501の底面の第1の凹部5018Aの内面が移動ステージ上の第1の凸部3021Bに当接するまで、サンプルプレートアセンブリを、移動ステージ上にて、回転させる。それによって、外側の固定フック3023の爪は、サンプルプレートアセンブリの外側の側面の孔5021より外れる。また、内側の固定フック3022の爪は、サンプルプレートアセンブリの内側の側面の孔5022より外れる。最後に、サンプルプレートアセンブリ501を全体的に持ち上げる。それによって、サンプルプレートアセンブリ501の底面の位置決め用の凹部5018A、5018Bは、ステージ上の位置決め用の凸部3021A、3021Bより、それぞれ外れる。サンプルプレートアセンブリを装着するとき、逆の動作を行なえばよい。
【0114】
本例では、移動ステージ上の凸部をサンプルプレートアセンブリ501の底面の凹部に係合させ、可動フック431によって、サンプルプレートアセンブリ501を押さえつけることにより、サンプルプレートアセンブリを移動ステージ上にて所定の位置に正確に位置決めすることができる。
【0115】
本例では、更に、サンプルプレートアセンブリを水平面に沿って回転するだけで、サンプルプレートアセンブリの取り付け及び取り外しができる。また、2つのサンプルプレートアセンブリでは、回転方向が反対であることを除けば、取り付け及び取り外し操作が同一である。そのため、片手で、2つのサンプルプレートアセンブリの取り付け及び取り外しができる。
【0116】
以上本発明の例を説明したが本発明は上述の例に限定されるものではなく特許請求の範囲に記載された発明の範囲にて様々な変更が可能であることは当業者によって容易に理解されよう。
【図面の簡単な説明】
【0117】
【図1】本発明によるキャピラリ電気泳動装置の概要を示す図である。
【図2】オートサンプラの動作を説明する説明図である。
【図3】オートサンプラの動作を説明する説明図である。
【図4】本発明によるオートサンプラの固定機構の例を説明する説明図である。
【図5】本発明によるオートサンプラのサンプルプレート識別機構の例を説明する説明図である。
【図6】本発明によるサンプルプレートアセンブリの構造の例を示す図である。
【図7】本発明によるオートサンプラのサンプルプレート識別機構の動作の例を説明する説明図である。
【図8】本発明によるオートサンプラの移動ステージに設けられたサンプルプレートアセンブリの固定機構の設置位置を説明する説明図である。
【図9】本発明によるオートサンプラの移動ステージに設けられたサンプルプレートアセンブリの固定機構の第1の例の構造及び動作を説明する説明図である。
【図10】本発明によるオートサンプラの移動ステージに設けられたサンプルプレートアセンブリの固定機構の第1の例の動作を説明する説明図である。
【図11】本発明によるオートサンプラの移動ステージに設けられた固定機構の例を説明する説明図である。
【図12】本発明によるサンプルプレートアセンブリに設けられた固定機構の例を説明する説明図である。
【図13】本発明によるオートサンプラの移動ステージに設けられたサンプルプレートアセンブリの固定機構の第2の例を説明する説明図である。
【図14】本発明によるオートサンプラの移動ステージに設けられたサンプルプレートアセンブリの固定機構の第3の例を説明する説明図である。
【図15】本発明によるオートサンプラの移動ステージに設けられたサンプルプレートアセンブリの固定機構の第4の例を説明する説明図である。
【符号の説明】
【0118】
101…キャピラリ、102…キャピラリアレイ、103…ポンプ機構、104…光学系、105…高圧電源、106…オーブン、108…シリンジ、109…ブロック、110…逆支弁、111…ポリマー容器、112…陽極バッファ容器、113…陽極電極、114…陰極電極、203…ロードヘッダ、205…キャピラリヘッド、206…キャピラリ陰極端、207…キャピラリ電極、
300…オートサンプラ、302…移動ステージ、303…リニアガイド、310…固定部、311…フォトインタラプタ、315…ハウジング、316…ドア、317…開閉検出機構、
400…固定機構、401…可動フック、402…レバー部、403…爪、404…回転軸、405…ネジリバネ、411…可動フック、412…レバー部、413…爪、414…回転軸、415…ネジリバネ、421…可動フック、422…レバー部、423…爪、424…回転軸、425…ネジリバネ、431…可動フック、432…レバー部、433…押圧部、434…回転軸、435…ネジリバネ、
501…サンプルプレートアセンブリ、501a〜501d…側面、502…サンプルプレートアセンブリ、502a〜502d…側面、503…バッファ容器、504…洗浄容器、505…廃液容器、
3021、3021A、3021B…凸部、3022、3023、3024…固定フック、4106…凹部、4302…凸部、
5011…試料、5012…サンプルプレート、5013…蒸発防止膜、5014…クリップ、5015…アダプタ、5017…検知板、5018、5018A、5018B…凹部、5021、5022…孔、5031…バッファ溶液、5033…蒸発防止膜、5033a…孔、5041…洗浄液、5043…蒸発防止膜、5043a…孔
【特許請求の範囲】
【請求項1】
一端にキャピラリヘッドが設けられ他端にキャピラリ陰極端が形成されたキャピラリと、該キャピラリ陰極端に試料容器を含む1又は複数の容器を搬送する移動ステージを備えたオートサンプラと、を有するキャピラリ電気泳動装置において、
前記キャピラリ陰極端より離れた位置に試料容器の種類を識別するセンサが固定され、前記センサによって前記移動ステージ上に配置された前記試料容器を識別することができるように、前記移動ステージを移動させることによって、前記センサを前記試料容器に近接させるように構成されていることを特徴とするキャピラリ電気泳動装置。
【請求項2】
請求項1記載のキャピラリ電気泳動装置において、前記センサはフォトインタラプタであり、前記試料容器の側面には該フォトインタラプタを遮光する検知板が装着されていることを特徴とするキャピラリ電気泳動装置。
【請求項3】
請求項1記載のキャピラリ電気泳動装置において、前記センサはRFリーダライタであり、前記試料容器の側面にはRFタグが装着されていることを特徴とするキャピラリ電気泳動装置。
【請求項4】
請求項1記載のキャピラリ電気泳動装置において、前記オートサンプラはハウジング内に配置され、該ハウジングは、前記試料容器を出し入れするためのドアと該ドアの開閉を検出する検出装置を有し、該検出装置によって、前記ドアの開閉が検出されると、前記試料容器が前記センサに近づくように前記移動ステージを移動させることを特徴とするキャピラリ電気泳動装置。
【請求項5】
請求項1記載のキャピラリ電気泳動装置において、
前記移動ステージに第1の係合部が設けられ、前記キャピラリ電気泳動装置の固定部に第2の係合部が設けられ、前記第1の係合部が前記第2の係合部に係合することによって、前記移動ステージの水平方向の移動が制限されることを特徴とするキャピラリ電気泳動装置。
【請求項6】
請求項1記載のキャピラリ電気泳動装置において、
前記キャピラリは該キャピラリを所定の温度に保持するオーブン内に保持され、前記第2の係合部は、前記オーブンに下端に設けられていることを特徴とするキャピラリ電気泳動装置。
【請求項7】
請求項1記載のキャピラリ電気泳動装置において、
前記第1の係合部はピンであり、前記第2の係合部は該ピンが挿入される穴であることを特徴とするキャピラリ電気泳動装置。
【請求項8】
一端にキャピラリヘッドが設けられ他端にキャピラリ陰極端が形成されたキャピラリと、該キャピラリ陰極端に試料容器を含む1又は複数の容器を搬送する移動ステージを備えたオートサンプラと、を有するキャピラリ電気泳動装置において、
前記移動ステージは、該移動ステージ上に並んで配置された少なくとも1対の試料容器を固定するための固定装置を有し、
前記固定装置は第1及び第2の可動フックと、該第1及び第2の可動フックの間に配置された1個の固定フックを有し、前記可動フックは回転軸回りに回転可能な突出部を有し、前記固定フックは両側に突出した第1及び第2の突出部を有し、
両側の側面に孔を備えた第1の試料容器を、前記第1の可動フックと前記固定フックの間に配置し、両側の側面に孔を備えた第2の試料容器を前記固定フックと前記第2の可動フックの間に配置したとき、
前記第1の試料容器の外側の側面の前記孔に、前記第1の可動フックの突出部が係合し、前記第1の試料容器の内側の側面の前記孔に、前記固定フックの第1の突出部が係合し、前記第2の試料容器の内側の側面の前記孔に、前記固定フックの第2の突出部が係合し、前記第2の試料容器の外側の側面の前記孔に、前記第2の可動フックの突出部が係合するように構成されていることを特徴とするキャピラリ電気泳動装置。
【請求項9】
請求項8記載のキャピラリ電気泳動装置において、
前記回転軸は水平方向に配置され、前記可動フックは、垂直な平面に沿って回転可能であることを特徴とするキャピラリ電気泳動装置。
【請求項10】
請求項8記載のキャピラリ電気泳動装置において、
前記回転軸は垂直方向に配置され、前記可動フックは、水平な平面に沿って回転可能であることを特徴とするキャピラリ電気泳動装置。
【請求項11】
請求項8記載のキャピラリ電気泳動装置において、前記可動フックを前記回転軸回りの回転させる回転力を発生するバネが設けられ、該回転力によって前記可動フックは、前記可動フックの突出部が前記試料容器の外側の側面の前記孔に係合する方向に押し付けられていることを特徴とするキャピラリ電気泳動装置。
【請求項12】
請求項8記載のキャピラリ電気泳動装置において、
前記第1及び第2の試料容器の底部の各々に2個の凹部が設けられ、前記移動ステージ上に前記凹部に対応した凸部が設けられ、前記第1の試料容器を、前記第1の可動フックと前記固定フックの間に配置し、前記第2の試料容器を前記固定フックと前記第2の可動フックの間に配置したとき、前記移動ステージ上の凸部は、前記第1及び第2の試料容器の底部の2個の凹部に、それぞれ係合するように構成されていることを特徴とするキャピラリ電気泳動装置。
【請求項13】
請求項11記載のキャピラリ電気泳動装置において、
前記第1及び第2の試料容器の底部の各々に設けられた2個の凹部のうち、一方の凹部は長穴として形成され、他方の凹部は丸穴として形成されていることを特徴とするキャピラリ電気泳動装置。
【請求項14】
一端にキャピラリヘッドが設けられ他端にキャピラリ陰極端が形成されたキャピラリと、該キャピラリ陰極端に試料容器を含む1又は複数の容器を搬送する移動ステージを備えたオートサンプラと、を有するキャピラリ電気泳動装置において、
前記移動ステージは、該移動ステージ上に並んで配置された少なくとも1対の試料容器を固定するための固定装置を有し、
前記固定装置は第1及び第2の可動フックと、1列に並んだ第1、第2及び第3の固定フックを有し、前記可動フックは回転軸回りに回転可能な突出部を有し、前記第1の固定フックは内側に突出した突出部を有し、前記第2の固定フックは両側に突出した第1及び第2の突出部を有し、前記第3の固定フックは内側に突出した突出部を有し、
両側の側面に孔を備えた第1の試料容器を、前記第1の固定フックと前記第2の固定フックの間に配置し、両側の側面に孔を備えた第2の試料容器を前記第2の固定フックと前記第3の固定フックの間に配置したとき、
前記第1の試料容器の外側の側面の前記孔に、前記第1の固定フックの突出部が係合し、前記第1の試料容器の内側の側面の前記孔に、前記第2の固定フックの第1の突出部が係合し、前記第2の試料容器の内側の側面の前記孔に、前記第2の固定フックの第2の突出部が係合し、前記第2の試料容器の外側の側面の前記孔に、前記第3の固定フックの突出部が係合し、
前記第1の可動フックの突出部を前記第1の試料容器の外側の側面に押圧し、前記第2の可動フックの突出部を前記第2の試料容器の外側の側面に押圧するように構成されていることを特徴とするキャピラリ電気泳動装置。
【請求項15】
請求項14記載のキャピラリ電気泳動装置において、
前記第1及び第2の試料容器の底部の各々に2個の凹部が設けられ、前記移動ステージ上に前記凹部に対応した凸部が設けられ、前記第1の試料容器を、前記第1の固定フックと前記第2の固定フックの間に配置し、前記第2の試料容器を前記第2の固定フックと前記第3の固定フックの間に配置したとき、前記移動ステージ上の凸部は、前記第1及び第2の試料容器の底部の2個の凹部に、それぞれ係合するように構成され、
前記第1及び第2の試料容器の底部の各々に設けられた2個の凹部のうち、一方の凹部は長穴として形成され、他方の凹部は丸穴として形成されていることを特徴とするキャピラリ電気泳動装置。
【請求項16】
請求項15記載のキャピラリ電気泳動装置において、
前記第1及び第2の可動フックの突出部が前記第1及び第2の試料容器の外側の側面に、それぞれ押圧していないとき、前記第1及び第2の試料容器は、前記移動ステージ上にて、前記第1及び第2の試料容器の底部の丸穴にそれぞれ係合している前記移動ステージ上の凸部回りに、枢動可能であり、前記第1及び第2の可動フックの突出部が前記第1及び第2の試料容器の外側の側面に、それぞれ押圧することによって、前記第1及び第2の試料容器は前記移動ステージ上に固定されることを特徴とするキャピラリ電気泳動装置。
【請求項17】
請求項14記載のキャピラリ電気泳動装置において、
前記回転軸は垂直方向に配置され、前記可動フックは、水平な平面に沿って回転可能であることを特徴とするキャピラリ電気泳動装置。
【請求項18】
請求項14記載のキャピラリ電気泳動装置において、前記可動フックを前記回転軸回りの回転させる回転力を発生するバネが設けられ、該回転力によって前記可動フックは、前記可動フックの突出部が前記試料容器の外側の側面の前記孔に係合する方向に押し付けられていることを特徴とするキャピラリ電気泳動装置。
【請求項1】
一端にキャピラリヘッドが設けられ他端にキャピラリ陰極端が形成されたキャピラリと、該キャピラリ陰極端に試料容器を含む1又は複数の容器を搬送する移動ステージを備えたオートサンプラと、を有するキャピラリ電気泳動装置において、
前記キャピラリ陰極端より離れた位置に試料容器の種類を識別するセンサが固定され、前記センサによって前記移動ステージ上に配置された前記試料容器を識別することができるように、前記移動ステージを移動させることによって、前記センサを前記試料容器に近接させるように構成されていることを特徴とするキャピラリ電気泳動装置。
【請求項2】
請求項1記載のキャピラリ電気泳動装置において、前記センサはフォトインタラプタであり、前記試料容器の側面には該フォトインタラプタを遮光する検知板が装着されていることを特徴とするキャピラリ電気泳動装置。
【請求項3】
請求項1記載のキャピラリ電気泳動装置において、前記センサはRFリーダライタであり、前記試料容器の側面にはRFタグが装着されていることを特徴とするキャピラリ電気泳動装置。
【請求項4】
請求項1記載のキャピラリ電気泳動装置において、前記オートサンプラはハウジング内に配置され、該ハウジングは、前記試料容器を出し入れするためのドアと該ドアの開閉を検出する検出装置を有し、該検出装置によって、前記ドアの開閉が検出されると、前記試料容器が前記センサに近づくように前記移動ステージを移動させることを特徴とするキャピラリ電気泳動装置。
【請求項5】
請求項1記載のキャピラリ電気泳動装置において、
前記移動ステージに第1の係合部が設けられ、前記キャピラリ電気泳動装置の固定部に第2の係合部が設けられ、前記第1の係合部が前記第2の係合部に係合することによって、前記移動ステージの水平方向の移動が制限されることを特徴とするキャピラリ電気泳動装置。
【請求項6】
請求項1記載のキャピラリ電気泳動装置において、
前記キャピラリは該キャピラリを所定の温度に保持するオーブン内に保持され、前記第2の係合部は、前記オーブンに下端に設けられていることを特徴とするキャピラリ電気泳動装置。
【請求項7】
請求項1記載のキャピラリ電気泳動装置において、
前記第1の係合部はピンであり、前記第2の係合部は該ピンが挿入される穴であることを特徴とするキャピラリ電気泳動装置。
【請求項8】
一端にキャピラリヘッドが設けられ他端にキャピラリ陰極端が形成されたキャピラリと、該キャピラリ陰極端に試料容器を含む1又は複数の容器を搬送する移動ステージを備えたオートサンプラと、を有するキャピラリ電気泳動装置において、
前記移動ステージは、該移動ステージ上に並んで配置された少なくとも1対の試料容器を固定するための固定装置を有し、
前記固定装置は第1及び第2の可動フックと、該第1及び第2の可動フックの間に配置された1個の固定フックを有し、前記可動フックは回転軸回りに回転可能な突出部を有し、前記固定フックは両側に突出した第1及び第2の突出部を有し、
両側の側面に孔を備えた第1の試料容器を、前記第1の可動フックと前記固定フックの間に配置し、両側の側面に孔を備えた第2の試料容器を前記固定フックと前記第2の可動フックの間に配置したとき、
前記第1の試料容器の外側の側面の前記孔に、前記第1の可動フックの突出部が係合し、前記第1の試料容器の内側の側面の前記孔に、前記固定フックの第1の突出部が係合し、前記第2の試料容器の内側の側面の前記孔に、前記固定フックの第2の突出部が係合し、前記第2の試料容器の外側の側面の前記孔に、前記第2の可動フックの突出部が係合するように構成されていることを特徴とするキャピラリ電気泳動装置。
【請求項9】
請求項8記載のキャピラリ電気泳動装置において、
前記回転軸は水平方向に配置され、前記可動フックは、垂直な平面に沿って回転可能であることを特徴とするキャピラリ電気泳動装置。
【請求項10】
請求項8記載のキャピラリ電気泳動装置において、
前記回転軸は垂直方向に配置され、前記可動フックは、水平な平面に沿って回転可能であることを特徴とするキャピラリ電気泳動装置。
【請求項11】
請求項8記載のキャピラリ電気泳動装置において、前記可動フックを前記回転軸回りの回転させる回転力を発生するバネが設けられ、該回転力によって前記可動フックは、前記可動フックの突出部が前記試料容器の外側の側面の前記孔に係合する方向に押し付けられていることを特徴とするキャピラリ電気泳動装置。
【請求項12】
請求項8記載のキャピラリ電気泳動装置において、
前記第1及び第2の試料容器の底部の各々に2個の凹部が設けられ、前記移動ステージ上に前記凹部に対応した凸部が設けられ、前記第1の試料容器を、前記第1の可動フックと前記固定フックの間に配置し、前記第2の試料容器を前記固定フックと前記第2の可動フックの間に配置したとき、前記移動ステージ上の凸部は、前記第1及び第2の試料容器の底部の2個の凹部に、それぞれ係合するように構成されていることを特徴とするキャピラリ電気泳動装置。
【請求項13】
請求項11記載のキャピラリ電気泳動装置において、
前記第1及び第2の試料容器の底部の各々に設けられた2個の凹部のうち、一方の凹部は長穴として形成され、他方の凹部は丸穴として形成されていることを特徴とするキャピラリ電気泳動装置。
【請求項14】
一端にキャピラリヘッドが設けられ他端にキャピラリ陰極端が形成されたキャピラリと、該キャピラリ陰極端に試料容器を含む1又は複数の容器を搬送する移動ステージを備えたオートサンプラと、を有するキャピラリ電気泳動装置において、
前記移動ステージは、該移動ステージ上に並んで配置された少なくとも1対の試料容器を固定するための固定装置を有し、
前記固定装置は第1及び第2の可動フックと、1列に並んだ第1、第2及び第3の固定フックを有し、前記可動フックは回転軸回りに回転可能な突出部を有し、前記第1の固定フックは内側に突出した突出部を有し、前記第2の固定フックは両側に突出した第1及び第2の突出部を有し、前記第3の固定フックは内側に突出した突出部を有し、
両側の側面に孔を備えた第1の試料容器を、前記第1の固定フックと前記第2の固定フックの間に配置し、両側の側面に孔を備えた第2の試料容器を前記第2の固定フックと前記第3の固定フックの間に配置したとき、
前記第1の試料容器の外側の側面の前記孔に、前記第1の固定フックの突出部が係合し、前記第1の試料容器の内側の側面の前記孔に、前記第2の固定フックの第1の突出部が係合し、前記第2の試料容器の内側の側面の前記孔に、前記第2の固定フックの第2の突出部が係合し、前記第2の試料容器の外側の側面の前記孔に、前記第3の固定フックの突出部が係合し、
前記第1の可動フックの突出部を前記第1の試料容器の外側の側面に押圧し、前記第2の可動フックの突出部を前記第2の試料容器の外側の側面に押圧するように構成されていることを特徴とするキャピラリ電気泳動装置。
【請求項15】
請求項14記載のキャピラリ電気泳動装置において、
前記第1及び第2の試料容器の底部の各々に2個の凹部が設けられ、前記移動ステージ上に前記凹部に対応した凸部が設けられ、前記第1の試料容器を、前記第1の固定フックと前記第2の固定フックの間に配置し、前記第2の試料容器を前記第2の固定フックと前記第3の固定フックの間に配置したとき、前記移動ステージ上の凸部は、前記第1及び第2の試料容器の底部の2個の凹部に、それぞれ係合するように構成され、
前記第1及び第2の試料容器の底部の各々に設けられた2個の凹部のうち、一方の凹部は長穴として形成され、他方の凹部は丸穴として形成されていることを特徴とするキャピラリ電気泳動装置。
【請求項16】
請求項15記載のキャピラリ電気泳動装置において、
前記第1及び第2の可動フックの突出部が前記第1及び第2の試料容器の外側の側面に、それぞれ押圧していないとき、前記第1及び第2の試料容器は、前記移動ステージ上にて、前記第1及び第2の試料容器の底部の丸穴にそれぞれ係合している前記移動ステージ上の凸部回りに、枢動可能であり、前記第1及び第2の可動フックの突出部が前記第1及び第2の試料容器の外側の側面に、それぞれ押圧することによって、前記第1及び第2の試料容器は前記移動ステージ上に固定されることを特徴とするキャピラリ電気泳動装置。
【請求項17】
請求項14記載のキャピラリ電気泳動装置において、
前記回転軸は垂直方向に配置され、前記可動フックは、水平な平面に沿って回転可能であることを特徴とするキャピラリ電気泳動装置。
【請求項18】
請求項14記載のキャピラリ電気泳動装置において、前記可動フックを前記回転軸回りの回転させる回転力を発生するバネが設けられ、該回転力によって前記可動フックは、前記可動フックの突出部が前記試料容器の外側の側面の前記孔に係合する方向に押し付けられていることを特徴とするキャピラリ電気泳動装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2009−162583(P2009−162583A)
【公開日】平成21年7月23日(2009.7.23)
【国際特許分類】
【出願番号】特願2007−341018(P2007−341018)
【出願日】平成19年12月28日(2007.12.28)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成21年7月23日(2009.7.23)
【国際特許分類】
【出願日】平成19年12月28日(2007.12.28)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]