
クイックセット容積アジャストメントを備えた容積調整可能な手動ピペット
容積調整可能ピペット10が、ハウジング12内をストップ32sまで、およびストップ32sから移動するように取り付けられたプランジャ20であって、ハウジングから延びる先端部30内に流体を吸引するため、および先端部30から流体を分配するためのプランジャ20を有している。ハウジング内を軸線方向に移動可能な容積設定32部材が、ストップおよびピペットの容積設定を画定しており、また使用者が回すことができる容積調整部材33によって軸線方向に移動可能である。また容積調整部材を回すことによって概略容積設定手段34および精密容積設定手段35が制御される。概略容積設定手段34は、容積調整部材33の比較的小さい回転に応答して容積設定部材32を軸線方向に比較的長い距離移動させ、また精密容積設定手段35は、容積調整部材33の比較的大きい回転に応答して容積設定部材32を軸線方向に比較的短い距離移動させる。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は容積調整可能な手動ピペットに関し、より詳細には、速やかに設定すること(クイックセット)が可能な容積調整機構を備えた改良型の手動ピペットに関する。
【背景技術】
【0002】
米国特許第3,827,305号明細書には、商用的に入手可能な最も初期のディジタル調整可能なエアーディスプレイスメント式ピペットの1つが記述されている。このピペットは、容積を調整することができるよう、固定ナットを通して延びるねじ付きシャフトを有している。シャフトを手で回すことによって、プランジャの軸線方向の移動を制限するためのストップ部材が軸線方向に移動し、それによりピペットの容積設定が規定される。容積設定は、それぞれねじ付きシャフトを取り巻いている一連の指示リングを有する機械式マイクロメータ・ディスプレイに表示される。
【0003】
米国特許第4,909,991号明細書には、日本国東京都在所の株式会社ニチリョーによる、最近商用的に入手可能な単一チャネル手動ピペットが記述されている。このニチリョー製ピペットは、手で保持することができる、プランジャに上向きのばね荷重をかけるための細長いハウジングを含む。プランジャの上端がこのハウジングの頂部の上に延びており、またプランジャの上端は、プランジャを手で回転させるときに親指と指を係合するため、および上部ストップと下部ストップとの間のピペット・ハウジング内でプランジャを軸線方向に移動させるための制御ノブを担持している。この下部ストップ位置において、ハウジングの下端に固着された先端部内のすべての液体がプランジャの下向きの移動によって排出される。上部ストップは、中空容積調整ねじまたはプランジャにキー止めされたシャフトの回転に応じて、ハウジング内で軸線方向に調整することができる。上部ストップを軸線方向に調整することにより、上部ストップへのプランジャの上向きの移動に応じてピペットが先端部内に吸い込むことができる液体の容積が調整される。このピペットは、プランジャが回転しないようにロックし、それにより上部ストップを固定位置に設定し、延いてはピペットの容積調整を設定するロック・ノブを含むロック機構をさらに有している。
【0004】
電子ディジタル・ディスプレイを備えた容積調整可能な手動ピペットもまた開発されており、米国特許第4,567,780号明細書、米国特許第4,763,535号明細書、および米国特許第5,892,161号明細書に開示されている。
【0005】
手動ピペットの容積調節性に対する当分野の現状をより完全に理解するために、上で特定した特許の各々を参照により本出願に組み込む。
【0006】
従来の上記手動ピペットの各々は、容積を設定するために、ピペットの容積ディスプレイを見ながら、ねじ付き容積設定シャフトまたはピペットの変位プランジャのいずれかを繰返し回転させなければならない。ピペットの容積を引き続いて設定する場合に、設定する容積の差が大きいと、その設定に明らかに時間がかかり、またその容積設定を達成するための肉体的な努力が必要である。
【0007】
したがって従来の手動ピペットの欠点の1つは、このようなピペットの容積を手動で正確に設定するために、時間、肉体的な努力および注意が必要であることである。手動ピペットの容積設定を変更するために必要な時間を短くするための試行の一環として、SocorexマイクロピペットCalibra822は、2つの円筒状カムを含む容積設定機構を有している。大きい方のカムは、ピペットの機械式容積ディスプレイの窓の左側に数字を表示し、小さい方のカムは、窓の右側に数字を表示する。ピペットのプランジャ・ボタンをロックした後、設定ホイールを回すことによって大きい方のカムが回転し、表示される数字が変化する。次に、設定ホイールを引き出し、続いて設定ホイールを回すことによって小さい方のカムが回転し、表示される数字が変化する。カムのこのような回転によってピペット内の機械式ストップが設定され、ピペットが吸引および分配する液体の容積が制御される。このCalibraピペットの容積設定構造は、手動ピペットの容積を設定するために必要な時間を短くすることができるが、この容積設定構造は、上で説明した従来の手動ピペット容積設定機構と比較すると、比較的複雑であり、且つコストがかかっている。またCalibraピペットによって提供される容積設定は、従来の容積設定機構によって提供される設定ほど細かい設定ではない。
【0008】
2002年8月6日に本発明の譲受人に発行された米国特許第6,428,750号明細書には、Calibraピペットの欠点を取り扱ったクイックセット容積アジャストメントを有する改良型の容積調整可能手動ピペットが記述されている。基本的にはこの容積調整可能手動ピペットは、(i)電子ディジタル・ディスプレイ、ならびに関連する位置検出および制御回路と、(ii)プランジャ・ユニットと、(iii)ピペットの容積設定および電子ディスプレイを同時に制御するためのクイックセット容積アジャストメント機構とを支持する、手で保持することが可能な細長い軸線方向ハウジングを有している。クイックセット容積アジャストメント機構は、ハウジング内におけるプランジャ・ユニットの上向きの移動を制限するピペット容積設定部材であって、ピペットの容積設定を規定するためのピペット容積設定部材を有している。容積設定部材は、プランジャ・ユニット上の軸線方向移動のために支持され、またピペットの使用者による操作が可能なロック機構によって、ハウジングに対して開放可能に固着されている。容積設定部材は、ハウジングから解放されると、プランジャ・ユニット上をプランジャ・ユニットと共に軸線方向に移動することができ、それによりピペットの容積が速やかに設定される。ハウジングに固着されたとき、プランジャ・ユニットは容積設定ユニットに対して軸線方向に移動することができ、それによって選択された量の液体がハウジングの下端から延びる中空シャフトに固着されたピペット先端部内に吸引され、またこのピペット先端部から分配される。ピペットの容積設定は、検出および制御回路によって監視され、ピペットの容積設定が電子ディジタル・ディスプレイにリアルタイムに表示される。この速やかな設定機能は、手動ピペットの分野における大きな利点を象徴していたが、複数のステップのロック操作およびロック解除操作がピペットの容易な取扱いを制限し、また動作速度を制限している。
【発明の開示】
【発明が解決しようとする課題】
【0009】
したがって、迅速且つ高度に正確な調節性を特徴とする単純な容積調整機構を有する容積調整可能手動ピペットが依然として必要とされている。本発明は、そのニーズに応えるものである。
【課題を解決するための手段】
【0010】
基本的には、本発明による容積調整可能なピペットは、ハウジング内をストップまで、およびストップから移動するために取り付けられたプランジャであって、ハウジングから延びる先端部内に流体を吸引するため、および先端部から流体を分配するためのプランジャを有している。ハウジング内を軸線方向に移動することができる容積設定部材がストップおよびピペットの容積設定を規定しており、この容積設定部材は、使用者が回すことができる容積調整部材によって軸線方向に移動させることが可能である。容積調整部材を回すことはまた、概略容積設定手段および精密容積設定手段を制御する。概略容積設定手段は、容積調整部材の比較的小さい回転に応答して容積設定部材を軸線方向に比較的長い距離を移動させ、また精密容積設定手段は、容積調整部材の比較的大きい回転に応答して容積設定部材を軸線方向に比較的短い距離を移動させる。したがって本発明によれば、容積調整部材を単純に連続的に回転させることによってピペットの容積が速やかに設定される。
【実施例】
【0011】
図に概略的に示すように、本発明は、(i)電子ディジタル・ディスプレイ14および関連する位置検出回路16ならびに制御回路18と、(ii)プランジャ・ユニット20と、(iii)ピペットの容積設定および電子ディスプレイを同時に制御するためのクイックセット容積アジャストメント機構22とを支持するハウジング12であって、手で保持することが可能な軸線方向に細長いハウジング12を有する容積調整可能な手動ピペット10を有している。
【0012】
プランジャ・ユニット20は、上向きのばね荷重がかけられて、ハウジング12内を軸線方向に移動するように支持されている。プランジャ・ユニット20の上端は、ハウジングの頂部の上に制御ノブ24を支持している。ハウジングの形状は、ピペットの使用者によって手で握られるような形状とされており、このとき使用者は親指を自由に使用して制御ノブ24を押し下げて、ピストン26を支えているプランジャ・ユニットの下端を下向きにシリンダ28の中へ移動させることによって、ハウジングの下端から延びる中空シャフト31に固着されたピペット先端部30から液体を分配することができる。
【0013】
基本的には、クイックセット容積アジャストメント機構22は、ハウジング12内におけるプランジャ・ユニット20の軸線方向の上向きの移動を制限する容積設定部材32であって、ピペット10の容積設定を画定するための容積設定部材32を有している。本発明によれば、容積設定部材32は、好適には、使用者による容積調整部材33の回転にのみ応答してハウジング12内を軸線方向に移動するように支持される。この点に関して、容積調整部材33の回転によって、概略容積設定手段34または精密容積設定手段35のいずれかが動作を開始する。概略容積設定手段34は、概略容積設定手段34が動作を開始すると、容積調整部材33の比較的小さい回転によって容積設定部材32の比較的大きい軸線方向の移動(つまり粗調整)が生成されるようにハウジング12内に支持されている。同様に、精密容積設定手段35は、精密容積設定手段35が動作を開始すると、容積調整部材33の比較的大きい回転によって容積設定部材32の比較的小さい軸線方向の移動(つまり微調整)が生成されるようにハウジング12内に支持されている。したがって容積調整部材33の連続的な回転を介して概略容積設定手段34および精密容積設定手段35を連続的にアクティブにすることにより、本発明によるピペットの使用者は容積調整部材を単純に回転させることによってピペットの容積を速やかに、且つ正確に設定および再設定することができる。これらの点に関して、容積調整部材33の連続的な回転は、概略容積設定手段34および精密容積設定手段35を連続的にアクティブにすることになる容積調整部材の回転として定義される。
【0014】
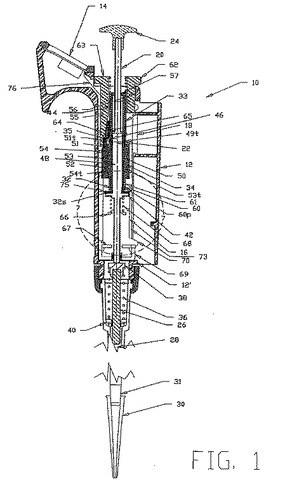
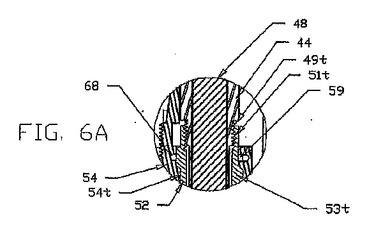
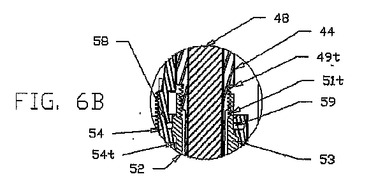
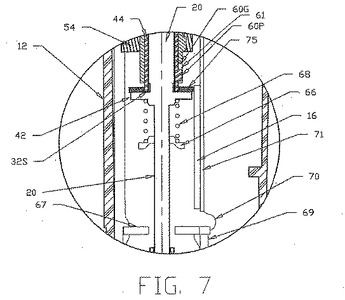
図1に示すピペット10に関して、より詳細には、ピペットのプランジャ・ユニット20は、ピストン・リターン38と底部ばね保持器40の間で圧縮されたリターンばね36によって上向きにばね荷重がかけられている。リターンばね36によって提供されるこの上向きのばね荷重によって、プランジャに固定されたフランジ部材42と、容積設定部材32を有する底または停止表面32sとが係合するまで、プランジャ・ユニット20がハウジング12内を上に向かって移動する。これらの点に関して、図1に示すように、ピペット10の容積設定部材32は、プランジャ20の六角形の中央部分48を軸線方向に受け入れる六角形の軸線方向のボア46を有するスリーブ44の下端を有している。スリーブ44は、細目雄ねじ山49tをその中央部分50に有する容積調整部材33を有している。図6A〜Dに最も明確に示すように、細目雄ねじ山49tは、軸線方向に延びる管状ねじ52の上端部51の細目雌ねじ山51tとかみ合うように設計されている。管状ねじ52は、ピペット10のハウジング12の開放上端56に取り付けらる従来の容積ロック55から下向きに軸線方向に延びる管状粗目ねじ山保持器54の粗目雌ねじ山54tとかみ合う粗目雄ねじ山53tをその中央部分53にさらに有している。以下で詳細に説明するように、図1〜6に示す本発明の実施例では、かみ合っている細目雄ねじ山49tおよび細目雌ねじ山51tは、精密容積設定手段35を有し、一方、かみ合っている粗目雄ねじ山53tおよび粗目雌ねじ山54tは、クイックセット容積アジャスティング機構22の概略容積設定手段34を有している。
【0015】
また、図1〜4に示すように、管状ねじ52は、容積設定部材32が管状ねじ52のねじ下端の下方に延びてフランジ42と係合し、ピペットの容積設定を規定する上部ストップとして機能するように、容積調整部材33を有するスリーブ44を軸線方向に受け入れている。
【0016】
また、スリーブ44は、細目ねじ山49tの上方で外側に放射状に段を形成しており、また容積ロック55内で垂直方向に上に向かって延びている。またスリーブ44は、制御ノブ24の下方でプランジャ20とスライド可能に係合するよう内側に突出したカラー57を備えている。このような構成により、容積ロック55が解放されると、制御ノブ24を回すことによって同じくスリーブ44が回転することになる。ねじ52に対するスリーブ44の初期回転位置に応じて、スリーブの初期回転によってスリーブをねじに対して回転させることができ、それによりねじ山49tがねじ山51tの上を上下に移動し、精密容積設定手段35の動作によって容積設定部材32の軸線方向の位置が微調整される。別法として、スリーブ44の初期回転によってスリーブをねじ52と共に回転させ、それによりねじ山53tをねじ山54tの上で上下に移動させ、概略容積設定手段34の動作によって容積設定部材32の軸線方向の位置を粗調整することも可能である。
【0017】
上で指摘したように、ねじ52に対するスリーブ44の初期回転位置によって、概略容積設定手段34または精密容積設定手段35のうちのどちらが最初に動作するかが決まる。この点に関して、図1〜4に示すクイックセット容積セッティング機構22の実施例の場合、概略容積設定手段34は、容積設定部材32の移動に対する力の閾値によって特徴づけられる。この閾値を超えるのは、精密容積設定手段35が容積調整部材33の回転に応答して所定の量だけ移動する場合のみである。例えば図2に示すように、管状粗目ねじ山保持器54の環状溝59に摩擦リング58が配置される。この摩擦リングは、摩擦リングによって定められる力の閾値に打ち勝つまでねじ52を担い、且つねじ回転を防止する。したがって概略容積設定手段34の力の閾値が打ち負かされない場合、プランジャ・ユニット24と共にスリーブ44(容積調整部材33)の初期回転によって、容積調整部材の回転方向に応じてねじ山49tがねじ山51tの上を上下に移動することになる。このねじ山49tの上下の移動によって容積設定部材32の垂直方向の微調整およびピペット10の容積設定が実施され、ねじ52は、摩擦リング58によって静止した状態を保持することになる。しかしながら、概略容積設定手段34の力の閾値が打ち負かされると、容積調整部材33の回転によって容積調整部材33と共にねじ52が回転することになる。この場合、容積調整部材33の回転方向に応じて、概略容積設定手段34の粗目ねじ山53tが管状粗目ねじ山保持器54の粗目ねじ山54tを上下に移動し、それにより容積設定部材32の垂直方向の粗調整およびピペット10の容積設定が実施される。
【0018】
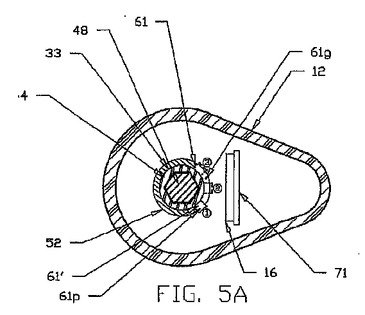
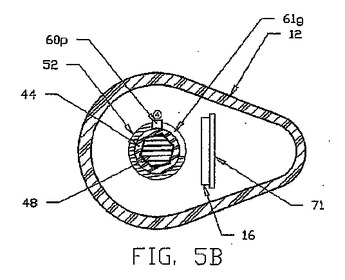
図1〜4に示す本発明の実施例では、容積調整部材33の回転を使用して概略容積設定手段34の力の閾値に打ち勝つための手段は、容積調整部材33またはねじ52のいずれか一方の上に容積微調整リミッター60を有し、また容積調整部材33またはねじ52のもう一方の上にショルダ61を有している。図1〜4および図5Aに示す容積微調整リミッター60は、その下端に隣接している容積調整部材33のスリーブ44から外側に放射状に延びるピン60pを有している。ピン60pは、管状ねじ52の下端のアーク形の溝61gに載っており、溝の両端は、ショルダ61およびショルダ61’を画定している。例えばピン60pがショルダ61に対して図5Aの初期回転位置「3」にある場合、制御ノブ24を回すことによって容積調整部材33が図5Bの位置「4」まで反時計方向に初期回転すると、容積調整部材33は、摩擦リング58によって定められた力閾値に打ち勝ち、ねじ52およびスリーブ44が容積調整部材33と共に、図5Bに示す回転位置まで反時計方向に回転することになる。このような移動によって粗目ねじ山53tが静止粗目ねじ山54tの上に載り、ハウジング12内の容積設定部材32およびその停止表面32sの垂直方向の位置が粗調整され、また図6Dに示す管状粗目ねじ山保持器54に対するねじ52の上向きの移動で示すように、ピペット10の概略容積設定が実施される。次に、ピペットの使用者がピペット10のより細かい容積設定の調整を希望する場合、使用者は、制御ノブ24を時計方向に回すことによって容積調整部材33を単純に時計方向に回転させるだけでよい。容積調整部材33のこのような移動によってピン60pがショルダ61から離れ、細目ねじ山49tが静止細目ねじ山51tの上に載り、それによりハウジング12内の容積設定部材32および表面32sが垂直方向に微調整され、またピペットの容積が微設定される。
【0019】
しかしながら、例えばピン60pがショルダ61’に対して図5Aの初期回転位置「1」にある場合、容積調整部材33が例えば図5Bの「4」で示す反対側の位置まで時計方向に初期回転すると、容積調整部材33は、同じく、摩擦リング58によって定められた力閾値に打ち勝ち、ねじ52およびスリーブ44は共に、容積調整部材33と共に時計方向に回転することになる。このような移動によって粗目ねじ山53tが静止粗目ねじ山54tの上に載り、ハウジング12内の容積設定部材32およびその停止表面32sの垂直方向の位置が粗調整され、またピペット10の概略容積設定が実施される。次に、ピペットの使用者がピペット10のより細かい容積設定の調整を希望する場合、使用者は、制御ノブ24を反時計方向に回すことによって容積調整部材33を単純に反時計方向に回転させるだけでよい。容積調整部材33のこのような移動によってピン60pがショルダ61’から離れ、細目ねじ山49tが静止細目ねじ山51tの上に載り、ハウジング12内の容積設定部材32および表面32sが垂直方向に微調整され、またピペットの容積の微設定が実施される。
【0020】
当然、ピン60pが図5Aの位置「1」または位置「3」に対応する初期位置にあるか、あるいはそれらの間の任意の位置、例えば位置「2」にあり、且つピペット10の容積設定の微調整のみが望ましい場合、使用者は、制御ノブ24を回すことによって容積調整部材33を適切な反時計方向または時計方向に回転させることができ、図6A〜Cに示すように、細目ねじ山49tが静止細目ねじ山51tを上下に移動し、容積設定部材32およびその停止表面32sの所望の微調整が実施される。しかしながら、ピン60pが図5Aに示す位置「1」と「3」の間の初期位置、例えば位置「2」にあり、且つ使用者がピペット10の容積設定の大きな変更の実施を希望する場合、容積の設定を大きくする場合とあるいは小さくする場合に応じて、最初に容積調整部材33によって位置「1」または位置「3」までピン60pを回転させなければならない。ピン60pのそのような回転の間、精密容積設定手段35がアクティブにされる。ピン60pが位置「1」または「3」に到達すると、容積調整部材33およびピン60pを同じ方向に継続して回転させることによって精密容積設定手段35が動作を停止し、既に説明したように概略容積設定手段34がアクティブになる。容積調整部材33を継続して回転させることにより、容積設定部材32によって、所望の新しい容積設定またはそれを若干超える設定まで速やかに粗調整される。使用者は、続いて、容積調整部材33の回転方向を逆にすることによって概略容積設定手段34の動作を停止し、且つ精密容積設定手段35をアクティブにする。精密容積設定手段35がアクティブになると、使用者は、容積調整部材33を継続して回転させ、それにより、ピペットの所望の新しい容積設定まで容積設定部材32の微調整をもたらす。
【0021】
いずれの場合においても、上で説明したように容積調整部材33を回転させることによってピペットの所望の容積設定が達成されると、使用者は、ピペット10の所望の容積設定を設定することができる。これは、使用者が容積ロック55をアクティブにして容積調整部材33をハウジング12に対して固着することによって達成される。この点に関して、図面に示す従来の容積ロック55は、ハウジング12の開放端56を通して上に向かって延びるロック・ノブ62を有していてもよい。このロック・ノブ62は、ロック・ノブの広くなった環状上端63が制御ノブ24の直ぐ下のハウジング12の頂部の上に位置するように支持されている。上端63は、ロック・ノブ62を回すこと、および容積ロック55を解放するかあるいはアクティブにすることが望ましいときに、ピペットの使用者が指で握るために設計されている。この点に関して、円周状に間隔を隔てた複数のアーク形垂直突起64がロック・ノブ62から下に向かって延びており、突起64の各々が、管状保持器54によって支えられたアーク形垂直突起65であって、対応する円周状に間を隔てたアーク形垂直突起65の雄ねじ山65tと係合する雌ねじ山64tを備えている。図面をより分かり易くするために、図1〜4にはそれぞれ複数の突起64および突起65のうちの1つしか示されていない。図に示すように、突起64の各々は、下に向かって外側に傾斜したカム表面64cを含む。このカム表面64cは、個々の突起65上で、上に向かって内側に傾斜したカム表面65cとかみ合っている。また突起65各々の内部表面65iと、容積調整部材33を有するスリーブ44の放射状に広くなった部分の円筒状の外面とは緊密に一致している。このような構成により、ピペットの使用者がピペット10の容積設定のロックを希望する場合、使用者は、ねじ山64tと65tおよびカム表面64cと65cの協働作用によって内部表面65iがスリーブ44をくさび留めし、それによりハウジング12内における容積調整部材33の回転がロックされるよう、ロック・ノブ62を単純に握って第1の方向に回す。ピペットの使用者が容積ロック55の解放およびピペットの容積設定の調整を希望する場合、使用者は、ロック・ノブ58を単純に握り、反対方向に回す。この場合、ねじ山64tと65tの協働作用によってカム表面64cと65cが離れ、内部表面65iがスリーブ44から解放される。したがって容積調整部材33はハウジング内で自由に回転することができ、それにより上で説明した方法でピペットの容積設定が速やかに、且つ正確に調整される。所望の新しい容積設定が達成されると、上で説明したように容積ロック55が再びアクティブにされ、いつでもピペット10を操作してサンプル流体を吸引し、分配することができる。
【0022】
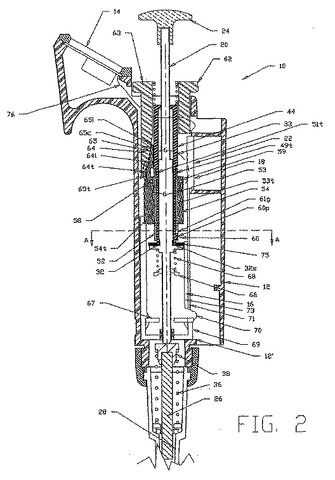
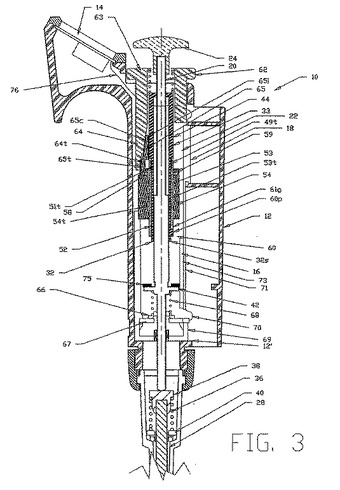
図2〜4は、ピペットを操作している間の様々な位置における事前容積設定ピペット10を示している。詳細には、図3には「ホーム・ポジション」にあるピペット10が示されている。ピペット10のホーム・ポジションは、ピペットがピペット先端部30への予め選択された量のサンプル流体の吸引を開始する位置であり、図3に示すホーム・ポジションから図2に示す「100%容積」位置へのプランジャ・ユニット20の移動によって、ピペットに固着されたピペット先端部30にサンプル流体が吸引される。このホーム・ポジションは、ホーム・スイッチ67と係合しているホーム・ポジション・コンタクト66によって画定される。図3に示すように、ホーム・ポジション・コンタクト66は、フランジ42から下に向かって延びるブロー・アウトばね68によって支えられており、一方、ホーム・スイッチ67は、ハウジング12の内側に延びる底部部分12’に配置された保持器69によって支持されている。ピペットの使用者がリターンばね36の上向きのばね力に対抗して制御ノブ24を押し下げ、それに応答してプランジャ・ユニット20がハウジング12内を下に向かって移動すると、ホーム・ポジション・コンタクト66とホーム・ポジション・スイッチ67とが係合する。ホーム・ポジション・スイッチ67は、リード線70によって、図1〜4および8に示す制御回路18の印刷回路基板71に電気接続されている。ホーム・ポジション・コンタクト66とホーム・ポジション・スイッチ67のこのような係合により、ピペットがそのホーム・ポジションにあることを示す信号が制御回路18に生成される。
【0023】
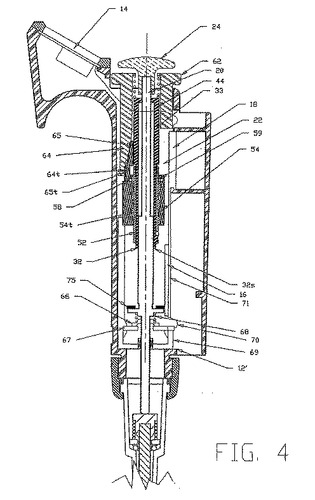
図4には、予め選択された量のサンプ流体がピペット先端部30から分配された後の「ブロー・アウト」位置にあるピペット10が示されている。図3と図4を比較して、ピペット10のブロー・アウト位置は、プランジャ・ユニット20がホーム・ポジションを通過して到達する位置であり、フランジ42の底がホーム・ポジション・コンタクト66の頂部に位置する位置であり、ブロー・アウトばね68がそれらの間で完全に圧縮されることを理解されたい。
【0024】
図2には、「100%容積」状態にあるピペット10が示されており、プランジャ・ユニット20は、フランジ部材42によって画定される最も上の位置にあり、リターンばね36の影響下で容積設定部材32の停止表面32sを上に向かって押し付けている。これは、ピペットの容積設定によって決定される事前設定量のサンプル流体をピペット先端部30に吸引した後のピペットの動作位置に対応する。図2およびピペット10の容積設定についての以上の説明から、ピペット10のこのような容積設定によって停止表面32sが容積設定部材32と共に垂直方向に移動することを理解されたい。またピペット10のこのような容積設定の間、リターンばね36の影響下でフランジ42が連続的に停止表面32sに押し付けられる。実際、このような容積設定手順の間、フランジは、停止表面32sと共に上下に移動する。したがってプランジャ・ユニット20は、ピペット10の容積を任意に調整している間、ハウジング内の容積設定部材32の垂直方向のあらゆる調整に追従する。容積設定部材32およびプランジャ・ユニット20のこのような垂直方向の移動は、制御回路18内で処理される電気信号を生成するセンサ回路16によって監視され、ピペットのディジタル容積設定としてディスプレイ14に視覚表示される。このような表示により、ピペット10の容積設定のあらゆる変化が速やかに表示され、このような容積設定の値がリアルタイムで監視される。
【0025】
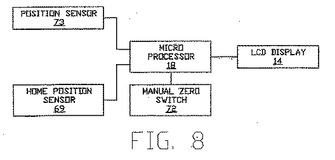
より詳細には、図8は、ディスプレイ、センサ回路および制御回路をブロック図で示したものであり、図1〜4は、このような回路を支持している構造を示したものである。図8に示すように、電子ディジタル・ディスプレイ14は、制御回路18を有する従来のマイクロプロセッサによって制御される従来のLCDディスプレイを有していてもよい。図に示すように、マイクロプロセッサ18に対する電気入力は、ハウジング12の頂部に配置された手動ゼロ設定スイッチ72、および位置センサ73とホーム・ポジション・センサ74とを有するセンサによって構成することができる。
【0026】
位置センサ73は、フランジ部材42によって支えられているか、さもなければプランジャ・ユニット20に取り付けられたセンサ・ターゲット75を備えた連続検出デバイスである。この点に関して、センサ16は、特定のタイプのセンサ・ターゲット75の位置を検出することができるタイプのセンサである。例えばセンサ・ターゲット75が磁石である場合、センサは、磁石によって生成される磁界に応答して、センサに対する磁石の位置を表す電気信号を生成することができるタイプのセンサである。このような位置信号は、ディスプレイ14がディジタル表示する数値を制御するためにディスプレイ14に対する電気入力を処理および制御するマイクロプロセッサ18に送信される。したがってピペット10が吸引モード、分配モードおよび他のモードで動作している間、ピペット先端部内の液体の量のリアルタイムな読み値が連続的に提供される。また上で説明した方法でピペットの容積を設定している間、フランジ42が容積設定部材32の停止表面32sに押し付けられている場合、すなわちピペット10が図2に示す100%容積位置にある場合、ディスプレイ14にディジタル表示されるリアルタイム値は、ピペット10の容積設定である。
【0027】
図3および図8を参照すると、ホーム・ポジション・センサ74の場合、図3に関連して上で説明したように、ホーム・ポジション・スイッチ67と係合しているホーム・ポジション・コンタクト66によって画定されるホーム・ポジションにプランジャ・ユニット20が位置している場合にホーム・ポジションが検出される。図3に示すように、ホーム・ポジション・コンタクト66は、フランジ42から下に向かって延びるブロー・アウトばね68によって支えられており、一方、ホーム・スイッチ67は、ハウジング12の内側に延びる底部部分12’に配置された保持器69によって支持されている。ピペットの使用者がリターンばね36の上向きのばね力に対抗して制御ノブ24を押し下げ、それに応答してプランジャ・ユニット20がハウジング12内を下に向かって移動すると、ホーム・ポジション・コンタクト66とホーム・ポジション・スイッチ67が係合する。ホーム・ポジション・スイッチ67は、リード線70によって、図1〜4および図8に示す制御回路18の印刷回路基板71に電気接続されている。ホーム・ポジション・コンタクト66とホーム・ポジション・スイッチ67とのこのような係合により、ピペットがそのホーム・ポジションにあることを示す信号が制御回路18を有するマイクロプロセッサに生成され、リード線76によってディスプレイ14に適用されて表示される。マイクロプロセッサは、例えば、ホーム・ポジションが検出されると「ゼロ」をディスプレイ14に表示する電気信号が生成されるようにプログラムすることができる。この場合、ホーム・ポジションの上方および下方のプランジャ・ユニット20の移動は、ディスプレイ14にディジタル表示される正および負の値によって示される。
【0028】
手動ゼロ設定スイッチ72は、ピペットの使用者がスイッチを手動でアクティブにすることによってディスプレイ14に表示されるディジタル量がゼロになるよう、リボン・ケーブル(図示せず)によってマイクロプロセッサに電気接続された従来のスイッチである。この機能は、ピペットの使用者が複数の液体をピペット先端部30に吸引することを希望する場合、あるいはマルチ分配動作モードのピペットで容量いっぱいの先端部の含有量を複数に当分割して分配することを希望する場合に有用である。
【0029】
例えば、希釈剤を使用して1つのサンプルを希釈する場合、使用者は最初に、ピペット10の最大ピックアップ量を、ピックアップすべきすべての流体の合計に設定することになる。使用者は次に、ピペット先端部30を希釈剤の中に挿入し、ディスプレイ14に表示される希釈剤の量の読み値が所望の量になるまでプランジャ・ボタン24を慎重に解放することになる。ディスプレイ14に表示される希釈剤の量の読み値が所望の量になると、使用者は、希釈剤貯蔵容器からピペット先端部を取り除き、手動ゼロ・スイッチ66を押して、表示された量を「ゼロ」にすることになる。次に、ピペット先端部を空中に保持している間、使用者は、サンプル液と希釈剤を分離するべく、所望する量のエア・ギャップをピペット先端部内に吸い込むことができるよう、プランジャを解放することになる。最後に、使用者は、表示を再度「ゼロ」にし、所望のサンプル量の液体をピペット先端部内に吸引することになる。
【0030】
マルチ分配動作モードのピペット10の場合、ピペットの使用者は、個々のアリコート(当分割)を開始する時点でゼロ・スイッチを押すことになり、ディスプレイは、ゼロ点に対する分配量を負の量の数字で表示することになる。
【0031】
次に、図9〜14に示す本発明の第2の実施例について説明する。第2の実施例は、ピペット10の基本構造に関連して上で説明した実施例と類似しているが、10’で示すピペットのクイックセット機構として遊星歯車機構22’を含む点で、上で説明した実施例と異なっている。ピペット10’の対応する要素は、ピペット10の参照数字と同じ数字で示されており、ここではピペット10’に対する詳細な説明は省略する。
【0032】
基本的には、ピペット10’は、(i)電子ディジタル・ディスプレイ14および関連する位置検出回路16ならびに制御回路18と、(ii)プランジャ・ユニット20と、(iii)ピペットの容積設定および電子ディスプレイを同時に制御するためのクイックセット容積アジャストメント機構22’とを支持する、手で保持することができる軸線方向に細長いハウジング12を有するディジタル調整可能手動エアーディスプレイスメント式ピペットを有している。
【0033】
プランジャ・ユニット20は、上向きのばね荷重がかけられており、ハウジング12内を軸線方向に移動するように支持される。プランジャ・ユニット20の上端は、ハウジングの頂部の上方に制御ノブ24を支持する。ハウジングの形状は、ピペットの使用者が手で握るような形状とされており、それによって使用者は、親指を自由に使用して制御ノブ24を押し下げ、ピストン26を支えているプランジャ・ユニットの下端を下向きにシリンダ28の中へ移動させることによって、ハウジングの下端から延びる中空シャフト31に固着されたピペット先端部30から液体を分配する。
【0034】
基本的には、クイックセット容積アジャストメント機構22’は、ハウジング12内におけるプランジャ・ユニット20の軸線方向の上向きの移動を制限する、ピペット10’の容積設定を画定するための容積設定部材32’を有している。本発明によれば、容積設定部材32’は、好適には、使用者による容積調整部材33’の回転にのみ応答してハウジング12内を軸線方向に移動するように支持されている。この点に関して、容積調整部材33’の回転によって、概略容積設定手段34’または精密容積設定手段35’のいずれかが動作を開始する。概略容積設定手段34’は、概略容積設定手段34’が動作を開始すると、容積調整部材33’の比較的小さい回転によって容積設定部材32’の比較的大きい軸線方向の移動(すなわち粗調整)が生成されるようにハウジング12内に支持されている。同様に、精密容積設定手段35’は、精密容積設定手段35’が動作を開始すると、容積調整部材33’の比較的大きい回転によって容積設定部材32’の比較的小さい軸線方向の移動(すなわち微調整)が生成されるようにハウジング12内に支持されている。したがって容積調整部材33’の連続的な回転を介して概略容積設定手段34’および精密容積設定手段35’を連続的にアクティブにすることにより、ピペット10’の使用者は、容積調整部材33’を単純に回転させることによってピペット10’の容積設定を速やかに、且つ正確に設定および再設定することができる。
【0035】
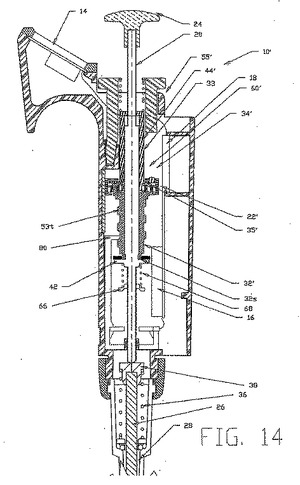
図9〜11および図14に示すピペット10’に関して、より詳細には、ピペットのプランジャ・ユニット20は、ピストン・リターン38と底部ばね保持器40の間で圧縮されるリターンばね36によって、上向きにばね荷重がかけられている。リターンばね36によって提供されるこの上向きのばね荷重によって、プランジャに固定されてたフランジ部材42と容積設定部材32’の底または停止表面32s’とが係合するまで、プランジャ・ユニット20がハウジング12内を上に向かって移動する。これらの点に関して、例えば図9に示すように、ピペット10’の容積設定部材32’は、粗目雄ねじ山53tをその中央部分53に有し、且つプランジャ20の六角形の中央部分48を受け入れている円筒状の軸線方向のボア52bを有する、軸線方向に延びる管状ねじ52’の下端を有している。粗目雄ねじ山53tは、保持器69に固着された、ハウジング12から内側に横方向に延びる固定フォロワ・アーム80とかみ合っている。このような構成のため、制御ノブ24を回しても、それによって管状ねじ52’が直接回転することはない。しかしながら、管状ねじ52’が回転すると、管状ねじ52’がハウジング内を固定フォロワ・アーム80上で軸線方向に移動し、それにより停止表面32s’の垂直方向の位置およびピペット10’の容積設定が調整される。既に指摘したように、管状ねじ52’のこのような回転は、プランジャ20の中央部分48の六角形の外部表面とかみ合う六角形の内部表面を有するスリーブ44’をピペット10’内に有する容積調整部材33’の回転によって生じる。このような構成により、制御ノブ24およびプランジャ20を回転させることによって生じるスリーブ44’の回転によって、概略容積設定手段34’または精密容積設定手段35’のいずれかがアクティブにされ、容積設定部材32’の停止表面32s’の軸線方向の位置が調整され、延いてはピペット10’の容積設定が調整される。
【0036】
ピペット10’の中に包含されたクイックセット容積アジャストメント機構22’の場合、概略容積設定手段34’および精密容積設定手段35’は、遊星歯車機構の中で具体化される。この遊星歯車機構は、水平方向に延び且つスリーブ44’の下端部分によって支持された太陽歯車81、および水平方向に延び且つ管状ねじ52’の頂部に固着された遊星歯車キャリア82を有し、また円周状に間を隔てた複数の遊星歯車83を支持している。遊星歯車の各々は、太陽歯車81、および水平方向に延びるリング歯車84であって、スリーブ44’に固着された細い垂直方向の円筒歯車ハウジング85内に捕獲されたリング歯車84とかみ合っている。
【0037】
円筒歯車ハウジング85内の垂直方向のスロット86(図12参照)は、ハウジング12に固着された摩擦条片87であって、垂直方向に延び、且つリング歯車84の半径方向の最も外側の表面と係合している摩擦条片87を受け入れている。したがって精密容積設定手段35’の所定の回転によって打ち負かされる力の閾値が、ピペット10’内の概略容積設定手段34’に対して定められる。この点に関して、精密容積設定手段35’は、太陽歯車81および静止リング歯車84の上に載っている遊星歯車83を有し、一方、概略容積設定手段34’は、精密容積設定手段35’が動作することによって力の閾値を超えた後の、上で説明した遊星歯車機構を有している。
【0038】
詳細には、摩擦条片87によって定められた力の閾値が打ち負かされていない場合、制御ノブ24およびプランジャ20を回転させることによって容積調整部材33’が回転し、それに対応して太陽歯車81が回転し、且つ静止リング歯車84上で遊星歯車83が回転することになる。遊星歯車83は、管状ねじ52’に固着された遊星歯車キャリア82によって支持されているため、管状ねじ52’は、遊星歯車が静止リング歯車83に沿って移動すると、比較的低速で回転することになる。粗目ねじ山53tが静止フォロワ・アーム80の上に載っているため、環状ねじ52’のこの比較的低速の回転によって容積設定部材32’が垂直方向に比較的短い距離を移動し、ピペット10’の容積設定が微調整される。
【0039】
摩擦条片87によって定められた力の閾値が打ち負かされると、容積調整部材33’が回転し、それに対応して太陽歯車81、遊星歯車キャリア82およびリング歯車84が比較的高速で回転し、遊星歯車83が太陽歯車とリング歯車の間で非回転状態になる。粗目ねじ山53tが静止フォロワ・アーム80の上に載っているため、遊星歯車機構におけるこのような組合せ歯車の回転によって容積設定部材32’が垂直方向に比較的長い距離を移動し、ピペット10’の容積設定が粗調整される。
【0040】
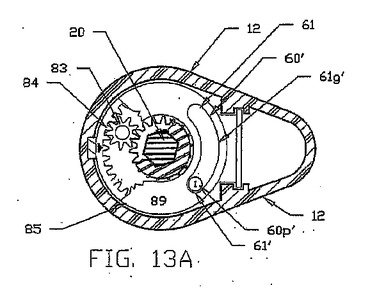
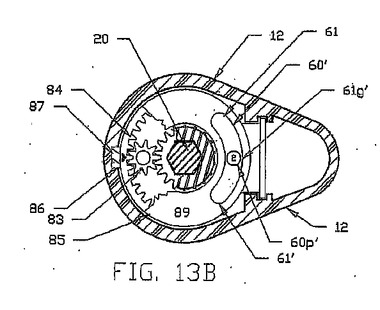
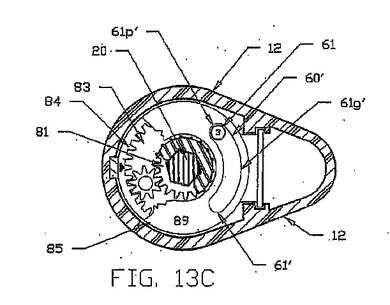
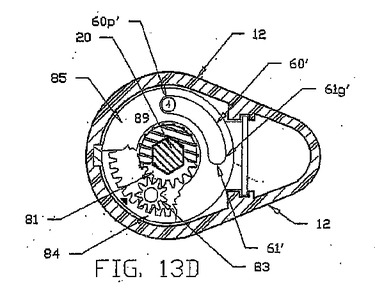
ピペット10’の場合、摩擦条片87および概略容積設定手段34’に関連する力の閾値に打ち勝つための手段は、容積調整部材33’の回転を使用して精密容積設定手段35’の所定の回転に応答する手段を有している。詳細には、図9〜11および図14に示す本発明の実施例では、容積調整部材33’の回転を使用して概略容積設定手段34’の力の閾値に打ち勝つための手段は、容積調整部材33’または歯車ハウジング85のいずれか一方の上に容積微調整リミッター60’を有し、また容積調整部材33’または歯車ハウジング85のもう一方の上にショルダ61を有している。図9〜12に示す容積微調整リミッター60’は、遊星歯車83の直ぐ上方の容積調整部材33’のスリーブ44’から外側に放射状に延びる水平プレート88から上に向かって延びているピン60p’を有している。ピン60p’は、歯車ハウジング85の水平方向の頂部89のアーク形の溝61g’に載っており、溝の両端は、ショルダ61およびショルダ61’を画定している。例えばピン60pがショルダ61に対して図12および図13Cの初期回転位置「3」にある場合、制御ノブ24を回すことによって容積調整部材33’が図12および図13Dの位置「4」まで反時計方向に初期回転すると、容積調整部材33’は、摩擦条片87によって定められる力閾値に打ち勝つことになる。容積調整部材33’が力閾値に打ち勝つと、歯車ハウジング85、リング歯車84、ねじ52’、遊星歯車83および太陽歯車81が容積調整部材33’と共に、図13Dに示す回転位置まで反時計方向に回転することになる。このような移動によって粗目ねじ山53tが静止コース・フォロワ・アーム80の上に載り、それによりハウジング12内の容積設定部材32’およびその停止表面32s’の垂直方向の位置が粗調整される。また、それにより、図14に示すフォロワ・アーム80に対するねじ52’の上向きの移動で示すように、ピペット10の概略容積設定が実施される。次に、ピペットの使用者がピペット10’のより細かい容積設定の調整を希望する場合、使用者は、制御ノブ24を時計方向に回すことによって容積調整部材33’を単純に時計方向に回転させるだけでよい。容積調整部材33’のこのような時計方向の移動によってピン60p’がショルダ61から離れ、またこの時計方向の移動に対応して太陽歯車81が図13Bに示す位置「2」まで時計方向に回転する。太陽歯車81が図13Bに示す位置「2」まで時計方向に回転すると、遊星歯車83が静止リング歯車84の上を回転してねじ52’が回転し、それによりハウジング12内の容積設定部材32’および表面32s’が垂直方向に微調整され、またピペット10’の容積が微設定される。
【0041】
しかしながら、例えばピン60p’がショルダ61’に対して図12および図13Aの初期回転位置「1」にある場合、容積調整部材33’が例えば図12および図13Dの「4」で示す反対側の位置まで時計方向に初期回転すると、容積調整部材33’は、同じく、摩擦条片87によって定められる力閾値に打ち勝つことになる。容積調整部材33’が力閾値に打ち勝つと、歯車ハウジング85、リング歯車84、ねじ52’、遊星歯車83および太陽歯車81が容積調整部材33’と共に時計方向に回転することになる。このような移動によって粗目ねじ山53tが静止フォロワ・アーム80の上に載り、それによりハウジング12内の容積設定部材32’およびその停止表面32s’の垂直方向の位置が粗調整される。また、それにより、フォロワ・アーム80に対するねじ52’の下向きの移動を使用してピペット10’の概略容積設定が実施される。次に、ピペットの使用者がピペット10’のより細かい容積設定の調整を希望する場合、使用者は、制御ノブ24を反時計方向に回すことによって容積調整部材33’を単純に反時計方向に回転させるだけでよい。容積調整部材33’のこのような反時計方向の移動によってピン60p’がショルダ61から離れ、またこの反時計方向の移動に対応して太陽歯車81が図13Bに示す位置「2」まで反時計方向に回転する。太陽歯車81が図13Bに示す位置「2」まで反時計方向に回転すると、遊星歯車83が静止リング歯車84の上を回転してねじ52’が回転し、それによりハウジング12内の容積設定部材32’および停止表面32s’が垂直方向に微調整され、またピペット10’の容積が微設定される。
【0042】
当然、ピン60p’が図12の位置「1」または位置「3」に対応する初期位置にあるか、あるいはそれらの間の任意の位置、例えば位置「2」にあり、且つピペット10’の容積設定の微調整のみが望ましい場合、使用者は、制御ノブ24を回すことによって容積調整部材33’を適切な反時計方向または時計方向に回転させることができる。容積調整部材33’が反時計方向または時計方向に回転すると、太陽歯車81が同じ方向に回転して遊星歯車83が静止リング歯車84の上で回転し、それにより容積設定部材32’およびその停止表面32s’の所望の微調整が実施される(図13A〜Cに示す遊星歯車83の回転位置と比較されたい)。しかしながら、ピン60p’が図12に示す位置「1」と「3」の間の初期位置、例えば位置「2」にあり、且つ使用者がピペット10’の容積設定の大きな変更の実施を希望する場合、容積の設定を大きくする場合とあるいは小さくする場合に応じて、最初に、容積調整部材33’によって位置「1」または位置「3」までピン60p’を回転させなければならない。ピン60p’のそのように回転の間、精密容積設定手段35’がアクティブにされる。ピン60p’が位置「1」または「3」に到達すると、容積調整部材33’およびピン60p’を同じ方向に継続して回転させることによって精密容積設定手段35’が動作を停止し、既に説明したように概略容積設定手段34’がアクティブにされる。容積調整部材33’を継続して回転させることにより、容積設定部材32’によって、所望の新しい容積設定またはそれを若干超える設定まで速やかに粗調整される。使用者は、続いて、容積調整部材33’の回転方向を逆にすることによって概略容積設定手段34’の動作を停止し、且つ精密容積設定手段35’をアクティブにすることができる。精密容積設定手段35’がアクティブにすると、使用者は、容積調整部材33’を継続して回転させることができ、容積設定部材32’によって、ピペット10’の所望の新しい容積設定まで微調整される。
【0043】
いずれの場合においても、上で説明したように、容積調整部材33’を回転させることによってピペット10’の所望の容積設定が達成されると、使用者は、ピペット10’の所望の容積設定を設定することができる。これは、使用者が容積ロック55’をアクティブにして容積調整部材33’をハウジング12に対して固着することによって達成される。この点に関して、図9〜11および図14に示す容積ロック55’は、ハウジング12の開放端56を通して上に向かって延びるロック・ノブ62’を有していてもよい。このロック・ノブ62’は、ロック・ノブの広くなった環状上端63が制御ノブ24の直ぐ下のハウジング12の頂部の上方に位置するように支持される。上端63は、ロック・ノブ62’を回すこと、および容積ロック55’を解放するかあるいはアクティブにすることが望ましいときに、ピペットの使用者によって指で握られるように設計されている。この点に関して、円周状に間を隔てた複数のアーク形垂直突起64’がロック・ノブ62’から下に向かって延びており、突起64’の各々は、ハウジング12のアーク形垂直内部側壁65wの雌ねじ山65t’と係合する雄ねじ山64t’を有して。図面をより分かり易くするために、図9〜11および図14にはそれぞれ複数の突起64’のうちの1つしか示されていない。図に示すように、突起64’の各々は、下に向かって外側に傾斜しているカム表面64cを有している。このカム表面64cは、ハウジング12の内壁から延びる突起65’の上で、上に向かって内側に傾斜しているカム表面65cとかみ合っている。また、突起65’の各々の内部表面65i’と、容積調整部材33’を備えたスリーブ44’の放射状に広くなった部分の円筒状の外面とは緊密に一致している。このような構成により、ピペットの使用者がピペット10’の容積設定のロックを希望する場合、使用者は、ねじ山64t’と65t’およびカム表面64cと65cの協働作用によって内部表面65i’がスリーブ44’をくさび留めし、ハウジング12内における容積調整部材33’の回転がロックされるよう、ロック・ノブ62’を単純に握って第1の方向に回す。ピペットの使用者が容積ロック55’の解放およびピペットの容積設定の調整を希望する場合、使用者は、ロック・ノブ62’を単純に握って、反対方向に回すことになる。この場合、ねじ山64t’と65t’の協働作用によってカム表面64cと65cが離れ、内部表面65i’がスリーブ44’から解放される。したがって容積調整部材33’はハウジング内で自由に回転することができ、上で説明した方法でピペットの容積設定が速やかに、且つ正確に調整される。所望の新しい容積設定が達成されると、上で説明したように容積ロック55’が再びアクティブにされ、いつでもピペット10’を操作してサンプル流体を吸引し、分配することができる。
【0044】
図9〜11は、ピペットを操作している間の様々な位置における事前容積設定ピペット10’を示したものである。詳細には、図10には「ホーム・ポジション」にあるピペット10’が示されている。ピペット10’のホーム・ポジションは、図10に示すホーム・ポジションから図9に示す「100%容積」位置へのプランジャ・ユニット20の移動によって、ピペットが、ピペットに固着されたピペット先端部への予め選択された量のサンプル流体の吸引を開始する位置である。このホーム・ポジションは、ホーム・スイッチ67と係合しているホーム・ポジション・コンタクト66によって画定される。図10に示すように、ホーム・ポジション・コンタクト66は、フランジ42から下に向かって延びるブロー・アウトばね68によって支えられており、一方、ホーム・スイッチ67は、ハウジング12の内側に延びる底部部分12’に配置された保持器69によって支持されている。ピペットの使用者がリターンばね36の上向きのばね力に対抗して制御ノブ24を押し下げ、それに応答してプランジャ・ユニット20がハウジング12内を下に向かって移動すると、ホーム・ポジション・コンタクト66とホーム・ポジション・スイッチ67とが係合する。ホーム・ポジション・スイッチ67は、リード線70によって、図9〜11および図8に示す制御回路18の印刷回路基板71に電気接続されている。ホーム・ポジション・コンタクト66とホーム・ポジション・スイッチ67のこのような係合により、ピペットがそのホーム・ポジションにあることを示す信号が制御回路18に生成される。
【0045】
図11には、予め選択された量のサンプル流体がピペット先端部から分配された後の「ブロー・アウト」位置にあるピペット10’が示されている。図10と図11を比較して、ピペット10’のブロー・アウト位置は、プランジャ・ユニット20がホーム・ポジションを通過して到達する位置であり、フランジ42の底がホーム・ポジション・コンタクト66の頂部に位置する位置であり、ブロー・アウトばね68がそれらの間で完全に圧縮されることを理解されたい。
【0046】
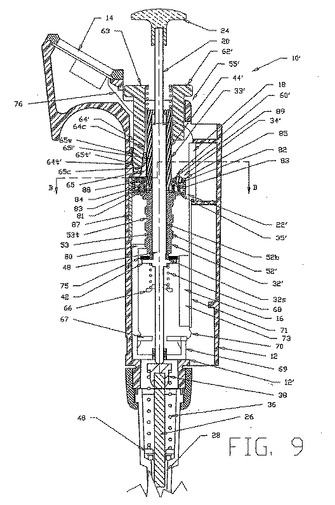
図9には、「100%容積」状態にあるピペット10’が示されており、プランジャ・ユニット20は、フランジ部材42によって画定された最も上の位置にあり、リターンばね36の影響下で容積設定部材32’の停止表面32s’を上に向かって押し付けている。これは、ピペットの容積設定によって決定される事前選択量のサンプル流体をピペット先端部に吸引した後のピペットの動作位置に対応している。図2およびピペット10’の容積設定についての以上の説明から、ピペット10のこのような容積設定によって停止表面32s’が容積設定部材32’と共に垂直方向に移動することを理解されたい。また、ピペット10’のこのような容積設定の間、リターンばね36の影響下でフランジ42が連続的に停止表面32s’に押し付けられる。実際、このような容積設定手順の間、フランジは、停止表面32s’と共に上下に移動する。したがってプランジャ・ユニット20は、ピペット10’の容積を任意に調整している間、ハウジング内の容積設定部材32’の垂直方向のあらゆる調整に追従する。容積設定部材32’およびプランジャ・ユニット20のこのような垂直方向の移動は、制御回路18内で処理される電気信号を生成するセンサ回路16によって監視され、ピペットのディジタル容積設定としてディスプレイ14に視覚表示される。このような表示により、ピペット10’の容積設定のあらゆる変化が速やかに表示され、このような容積設定の値がリアルタイムで監視される。
【0047】
より詳細には、図8は、ディスプレイ、センサ回路および制御回路をブロック図で示したもので、このブロック図に関連して説明されており、一方、図9〜11は、このような回路を支持している構造を示したものである。
【0048】
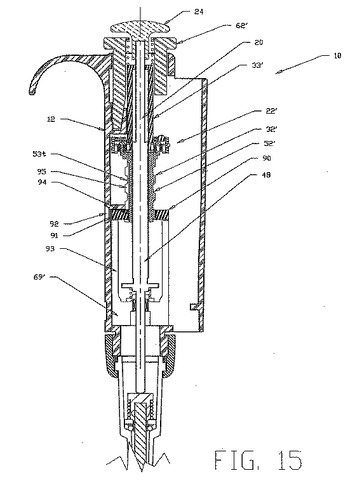
上で説明した本発明の2つの好ましい実施例のいずれの場合においても、図に示すピペットの容積設定を監視および表示するための手段は、電子ディスプレイ・システムを有している。本発明には、本発明の好ましい実施例に機械式ディスプレイ・システムを含むことができることが意図されている。この点に関して、図15は、このような機械式ディスプレイ・システムの一実施例を備えた図11に示すピペット10’を示したものである。詳細には、図に示すように、図15のピペット10’は、ハウジング12の側面の窓92に面した数字支持外部表面91を有する比較的大きい従来のカウンタ・ホイール90を含んでいる。カウンタ・ホイール90は、数表示69’で示す保持器69の円筒状バージョンの頂部に支持されている。またカウンタ・ホイール90は、容積設定部材32’を有する管状ねじ52’と共に回転するように取り付けられている。この点に関して、キー94はカウンタ・ホイールの内部ハブから内側に延びており、また管状ねじ52’の中を垂直方向に延びているキーウェイ95に載っている。このような構成により、カウンタ・ホイール90は、図9〜11および図14に関連して上で説明した方法でピペット10’の容積設定を調整する際に、管状ねじ52’と共に回転することになる。カウンタ・ホイール90が回転すると、ピペットの使用者に見えるよう、ピペット10’の容積設定を示す異なる数字が窓91を通して表示される。
【0049】
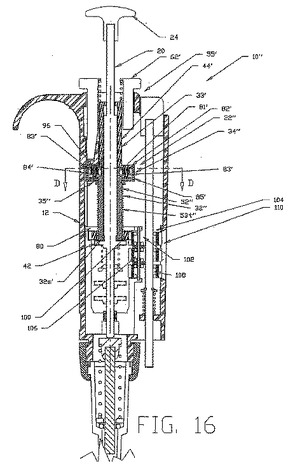
また図16に示す本発明の実施例も、参照数字10”で示す改変型バージョンのピペット10’の中に機械式容積ディスプレイ・システムを有している。ピペット10”は、上で説明したピペット10’と類似しているが、クイックセット・システム22’と、比較的細目の雄ねじ山53t”を支持するねじ52”を有する改変型容積設定部材32”とを有する反転バージョンの遊星歯車機構を含む点でピペット10’と異なる。
【0050】
より詳細には、反転遊星歯車機構は、容積調整部材33’を有するスリーブ44’の下端で放射状に外側に延びる水平フランジの形態の遊星歯車キャリア82’を有している。円周状に間を隔てた複数の遊星歯車83’が、遊星歯車キャリア82’によって支持され、且つ遊星歯車キャリア82’の下方に延び、それによって容積調整部材33’を有するねじ52”の上部部分に固着された太陽歯車81’とかみ合っている。また遊星歯車83’は、歯車ハウジング85’によって支持された、外側に水平方向に延びるリング歯車84’とかみ合っている。
【0051】
図16に示すように、摩擦リング96は、遊星歯車キャリア・プレート82’と歯車ハウジング85’との間に捕獲され、概略容積設定手段35”に対する力の閾値を定めている。この力の閾値は、リング歯車84’が遊星歯車83’に対して回転することができるようになる前に、作動状態の精密容積設定手段35’を使用した容積調整部材33’の所定の回転によって打ち負かされなければならない。上で説明した実施例の場合と同様、この力の閾値は、リミッター60”とショルダ61”の協働動作によって打ち負かされる。
【0052】
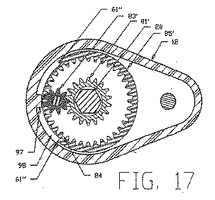
図17に示すように、リミッター60”は、ピペット10”内に、ハウジング12の内側から延びる内側ストップ97であって、リング歯車84”に固定された歯車ハウジング85’の外部表面のアーク形の溝98に載っている内側ストップ97を有している。溝の両端はショルダ61”を画定している。動作に関しては、太陽歯車81’、遊星歯車83’およびリング歯車84’が図17に示す位置にある場合、精密容積設定手段35”が動作状態になり、制御ノブ24およびプランジャ20の回転によって容積調整部材33’が回転し、それにより遊星歯車83’およびリング歯車84’がユニットとして回転し、それに対応して太陽歯車81’が回転することになる。太陽歯車81’はねじ52”に固定されているため、ねじ52”は、静止フォロワ・アーム80の上に載っている細目ねじ山53t”と同様の方法で低速で回転し、それにより停止表面32s’の垂直方向の位置が微調整され、延いてはピペット10”の容積設定が微調整される。
【0053】
ピペット10”の容積設定のこのような微調整は、内側ストップ97がいずれか一方のショルダ61”と係合するまで継続される。内側ストップ97がいずれか一方のショルダ61”と係合すると、精密容積設定手段35”の動作が停止し、概略容積設定手段34”がアクティブになる。これは、容積調整部材33’が継続して回転することにより、内側ストップ97がいずれか一方のショルダ61”にもたれかかることによって生じ、その結果、摩擦リング96によって定められた力閾値に打ち勝ってリング歯車84’が遊星歯車83’に対して回転し、容積設定部材33’が回転を継続する。リング歯車84’が遊星歯車83’に対して回転し、容積設定部材33’が回転を継続すると、容積調整部材33’によってリング歯車84’が回転し、それにより遊星歯車83’が回転して太陽歯車81’が高速で駆動される。細目ねじ山53t”は静止フォロワ・アーム80の上に載っているため、太陽歯車81’が駆動されると、ねじ52”がより高速で回転し、それに対応してねじ52”がより高速で垂直方向に移動する。すなわち、ねじ52”が粗調整され、ピペット10”の容積設定が調整される。
【0054】
上で説明した本発明の実施例の場合と同様、ピペット10”の容積設定のこのような粗調整に続いて容積設定の微調整を実施することができる。これは、容積調整部材33’を単純に逆方向に回転させることによって達成することができる。容積調整部材33’が逆方向に回転すると、内側ストップ97がショルダ61”から離れ、概略容積設定手段34”の動作が停止し、精密容積設定手段35”が再びアクティブにされる。精密容積設定手段35”が再びアクティブにされると、容積調整部材33’が逆方向の回転を継続し、その結果、リング歯車84’および遊星歯車83’がユニットとして回転し、それにより太陽歯車81’およびねじ52”がより低速で回転し、上で説明した方法でハウジング12内の停止表面32s’の垂直方向の位置が微調整され、ピペット10”の容積設定が微調整される。
【0055】
図16に示すピペット10”の場合、ピペットの容積設定の粗調整および微調整は、図に示す機械式ディスプレイ・システムによって視覚表示される。図に示すように、機械式ディスプレイ・システムは、内側に延びる歯車がねじ52”の外部表面の垂直スプライン(図示せず)とかみ合う保持器69によって支持された、水平方向に延びる二重リング歯車100を有している。このような構造により、ピペット10”の容積設定を上で説明したように調整している間、ねじ52”が回転し、それにより二重リング歯車100が回転する。二重リング歯車100の外側に延びる歯車は、平歯車カウンタ・ホイール102およびそれに類似したホイール106、108を有する標準ホイール機械式カウンタ104の平歯車カウンタ・ホイール102とかみ合っている。従来の方法では、カウンタ・ホイールは、平歯車カウンタ・ホイール102が二重平歯車100と共に回転するように構築され、組み立てられている。ホイール106は、平歯車カウンタ・ホイール102が1回転する毎に1ユニット回転し、一方、ホイール108は、ホイール106が1回転する毎に1ユニット回転する。ホイール102、106および108は、ピペット10”の使用者に提供されたディジタル・ディスプレイに、ハウジング12内のカウンタ104によって窓110を通して、ユニット、10および100の表示を提供する。
【0056】
以上、本発明の特定の実施例について詳細に示し、説明してきたが、本発明の精神を逸脱することなく、上で説明した実施例に変更および改変を加えることができることを理解されたい。したがって本発明の範囲は、特許請求の範囲の各請求項によってのみ限定されるものとする。
【図面の簡単な説明】
【0057】
【図1】電子ディジタル・ディスプレイおよび関連する位置検出回路ならびに制御回路と、プランジャ・ユニットと、本発明によるクイックセット容積アジャストメント機構の第1の実施例とを支持するハウジングであって、手で保持することができる軸線方向に細長いハウジングを有する容積調整可能手動ピペットの部分側断面図である。
【図2】図1に示す容積調整可能手動ピペットの上部部分の「100%容積」位置における部分拡大側断面図である。
【図3】容積調整可能手動ピペットが「ホーム」位置にある図2と同様の部分拡大側断面図である。
【図4】容積調整可能手動ピペットが「ブロー・アウト」位置にある図2と同様の部分拡大側断面図である。
【図5A】容積設定部材を微調整している間の異なる回転位置における容積調整部材を示す、A−Aの方向から見た図2に示すクイックセット機構の一部の拡大断面上面図である。
【図5B】容積設定部材を粗調整している間の回転位置における容積調整部材を示す、A−Aの方向から見た図2に示すクイックセット機構の一部の拡大断面上面図である。
【図6A】図5Aおよび図5Bに示す回転位置における容積調整部材の垂直方向の位置を示す、6−6のラベルが振られた図2の卵形線内に示されているクイックセット機構の一部の拡大側断面図である。
【図6B】図5Aおよび図5Bに示す回転位置における容積調整部材の垂直方向の位置を示す、6−6のラベルが振られた図2の卵形線内に示されているクイックセット機構の一部の拡大側断面図である。
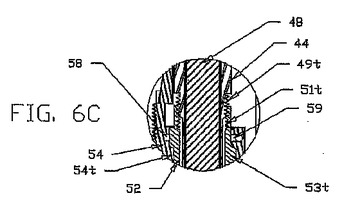
【図6C】図5Aおよび図5Bに示す回転位置における容積調整部材の垂直方向の位置を示す、6−6のラベルが振られた図2の卵形線内に示されているクイックセット機構の一部の拡大側断面図である。
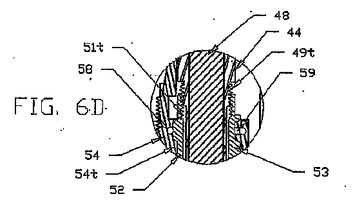
【図6D】図5Aおよび図5Bに示す回転位置における容積調整部材の垂直方向の位置を示す、6−6のラベルが振られた図2の卵形線内に示されているクイックセット機構の一部の拡大側断面図である。
【図7】7−7のラベルが振られた図1の円内の部分の拡大図である。
【図8】図1に示す、すべて本発明による電子ディスプレイおよび関連するセンサ回路ならびに制御回路を有する典型的な電子回路のブロック図である。
【図9】「100%容積」位置にあり、且つ電子ディジタル・ディスプレイおよび関連する位置検出回路ならびに制御回路と、プランジャ・ユニットと、本発明によるクイックセット容積アジャストメント機構の第2の実施例または遊星歯車箱実施例とを支持するハウジングであって、手で保持することができる軸線方向に細長いハウジングを有する容積調整可能手動ピペットの上部部分の部分側断面図である。
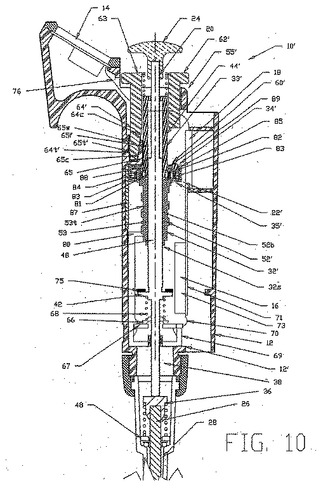
【図10】図9に示す容積調整可能手動ピペットの「ホーム」位置における部分側断面図である。
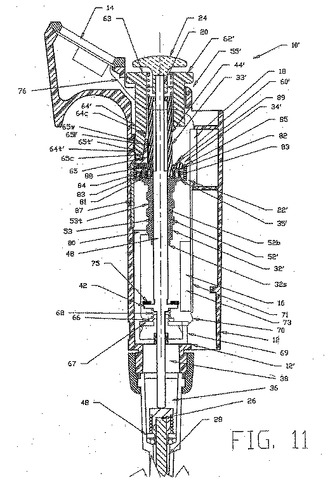
【図11】図9に示す容積調整可能手動ピペットの「ブロー・アウト」位置における部分側断面図である。
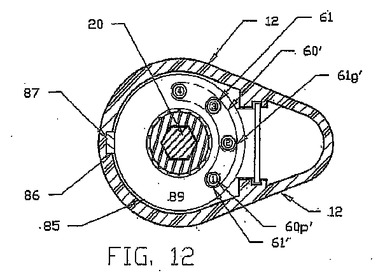
【図12】異なる回転位置における容積調整部材を示す、B−Bの方向から見た図9に示すクイックセット機構の一部の拡大断面上面図である。
【図13A】図9に示す遊星歯車箱の太陽歯車とリング歯車の間の遊星歯車の、図12に示す回転位置毎の異なる回転位置を示すために、リング歯車カバーの一部が取り外された図12に示すクイックセット機構の一部の拡大断面上面図である。
【図13B】図9に示す遊星歯車箱の太陽歯車とリング歯車の間の遊星歯車の、図12に示す回転位置毎の異なる回転位置を示すために、リング歯車カバーの一部が取り外された図12に示すクイックセット機構の一部の拡大断面上面図である。
【図13C】図9に示す遊星歯車箱の太陽歯車とリング歯車の間の遊星歯車の、図12に示す回転位置毎の異なる回転位置を示すために、リング歯車カバーの一部が取り外された図12に示すクイックセット機構の一部の拡大断面上面図である。
【図13D】図9に示す遊星歯車箱の太陽歯車とリング歯車の間の遊星歯車の、図12に示す回転位置毎の異なる回転位置を示すために、リング歯車カバーの一部が取り外された図12に示すクイックセット機構の一部の拡大断面上面図であって、容積設定部材を粗調整している間のリング歯車の回転運動を示す拡大断面上面図である。
【図14】容積設定部材を粗調整している間の、図13Cに示す位置と図13Dに示す位置との間の容積調整部材の回転運動を使用した容積設定部材の垂直方向の移動を示す、クイックセット機構の一部の拡大垂直側断面図である。
【図15】図9に示す容積調整可能手動ピペットと類似した、本発明によるクイックセット容積アジャストメント機構の遊星歯車箱実施例を含む容積調整可能手動ピペットであって、図9に示す電子ディスプレイの代わりに単一の大型カウンタ・ホイールを有する機械式容積指示器を含む容積調整可能手動ピペットの上部部分の部分側断面図である。
【図16】図15に示す容積調整可能手動ピペットと類似した、本発明によるクイックセット容積アジャストメント機構として改変型遊星歯車箱実施例を含む容積調整可能手動ピペットであって、一連のカウンタ・ホイールを有する機械式容積指示器を含む容積調整可能手動ピペットの上部部分の部分側断面図である。
【図17】リング歯車および図16に示す遊星歯車実施例の太陽歯車とリング歯車の間の遊星歯車の部分を示すために、図16に示すクイックセット機構を線D−Dの方向から見た部分の拡大断面上面図である。
【技術分野】
【0001】
本発明は容積調整可能な手動ピペットに関し、より詳細には、速やかに設定すること(クイックセット)が可能な容積調整機構を備えた改良型の手動ピペットに関する。
【背景技術】
【0002】
米国特許第3,827,305号明細書には、商用的に入手可能な最も初期のディジタル調整可能なエアーディスプレイスメント式ピペットの1つが記述されている。このピペットは、容積を調整することができるよう、固定ナットを通して延びるねじ付きシャフトを有している。シャフトを手で回すことによって、プランジャの軸線方向の移動を制限するためのストップ部材が軸線方向に移動し、それによりピペットの容積設定が規定される。容積設定は、それぞれねじ付きシャフトを取り巻いている一連の指示リングを有する機械式マイクロメータ・ディスプレイに表示される。
【0003】
米国特許第4,909,991号明細書には、日本国東京都在所の株式会社ニチリョーによる、最近商用的に入手可能な単一チャネル手動ピペットが記述されている。このニチリョー製ピペットは、手で保持することができる、プランジャに上向きのばね荷重をかけるための細長いハウジングを含む。プランジャの上端がこのハウジングの頂部の上に延びており、またプランジャの上端は、プランジャを手で回転させるときに親指と指を係合するため、および上部ストップと下部ストップとの間のピペット・ハウジング内でプランジャを軸線方向に移動させるための制御ノブを担持している。この下部ストップ位置において、ハウジングの下端に固着された先端部内のすべての液体がプランジャの下向きの移動によって排出される。上部ストップは、中空容積調整ねじまたはプランジャにキー止めされたシャフトの回転に応じて、ハウジング内で軸線方向に調整することができる。上部ストップを軸線方向に調整することにより、上部ストップへのプランジャの上向きの移動に応じてピペットが先端部内に吸い込むことができる液体の容積が調整される。このピペットは、プランジャが回転しないようにロックし、それにより上部ストップを固定位置に設定し、延いてはピペットの容積調整を設定するロック・ノブを含むロック機構をさらに有している。
【0004】
電子ディジタル・ディスプレイを備えた容積調整可能な手動ピペットもまた開発されており、米国特許第4,567,780号明細書、米国特許第4,763,535号明細書、および米国特許第5,892,161号明細書に開示されている。
【0005】
手動ピペットの容積調節性に対する当分野の現状をより完全に理解するために、上で特定した特許の各々を参照により本出願に組み込む。
【0006】
従来の上記手動ピペットの各々は、容積を設定するために、ピペットの容積ディスプレイを見ながら、ねじ付き容積設定シャフトまたはピペットの変位プランジャのいずれかを繰返し回転させなければならない。ピペットの容積を引き続いて設定する場合に、設定する容積の差が大きいと、その設定に明らかに時間がかかり、またその容積設定を達成するための肉体的な努力が必要である。
【0007】
したがって従来の手動ピペットの欠点の1つは、このようなピペットの容積を手動で正確に設定するために、時間、肉体的な努力および注意が必要であることである。手動ピペットの容積設定を変更するために必要な時間を短くするための試行の一環として、SocorexマイクロピペットCalibra822は、2つの円筒状カムを含む容積設定機構を有している。大きい方のカムは、ピペットの機械式容積ディスプレイの窓の左側に数字を表示し、小さい方のカムは、窓の右側に数字を表示する。ピペットのプランジャ・ボタンをロックした後、設定ホイールを回すことによって大きい方のカムが回転し、表示される数字が変化する。次に、設定ホイールを引き出し、続いて設定ホイールを回すことによって小さい方のカムが回転し、表示される数字が変化する。カムのこのような回転によってピペット内の機械式ストップが設定され、ピペットが吸引および分配する液体の容積が制御される。このCalibraピペットの容積設定構造は、手動ピペットの容積を設定するために必要な時間を短くすることができるが、この容積設定構造は、上で説明した従来の手動ピペット容積設定機構と比較すると、比較的複雑であり、且つコストがかかっている。またCalibraピペットによって提供される容積設定は、従来の容積設定機構によって提供される設定ほど細かい設定ではない。
【0008】
2002年8月6日に本発明の譲受人に発行された米国特許第6,428,750号明細書には、Calibraピペットの欠点を取り扱ったクイックセット容積アジャストメントを有する改良型の容積調整可能手動ピペットが記述されている。基本的にはこの容積調整可能手動ピペットは、(i)電子ディジタル・ディスプレイ、ならびに関連する位置検出および制御回路と、(ii)プランジャ・ユニットと、(iii)ピペットの容積設定および電子ディスプレイを同時に制御するためのクイックセット容積アジャストメント機構とを支持する、手で保持することが可能な細長い軸線方向ハウジングを有している。クイックセット容積アジャストメント機構は、ハウジング内におけるプランジャ・ユニットの上向きの移動を制限するピペット容積設定部材であって、ピペットの容積設定を規定するためのピペット容積設定部材を有している。容積設定部材は、プランジャ・ユニット上の軸線方向移動のために支持され、またピペットの使用者による操作が可能なロック機構によって、ハウジングに対して開放可能に固着されている。容積設定部材は、ハウジングから解放されると、プランジャ・ユニット上をプランジャ・ユニットと共に軸線方向に移動することができ、それによりピペットの容積が速やかに設定される。ハウジングに固着されたとき、プランジャ・ユニットは容積設定ユニットに対して軸線方向に移動することができ、それによって選択された量の液体がハウジングの下端から延びる中空シャフトに固着されたピペット先端部内に吸引され、またこのピペット先端部から分配される。ピペットの容積設定は、検出および制御回路によって監視され、ピペットの容積設定が電子ディジタル・ディスプレイにリアルタイムに表示される。この速やかな設定機能は、手動ピペットの分野における大きな利点を象徴していたが、複数のステップのロック操作およびロック解除操作がピペットの容易な取扱いを制限し、また動作速度を制限している。
【発明の開示】
【発明が解決しようとする課題】
【0009】
したがって、迅速且つ高度に正確な調節性を特徴とする単純な容積調整機構を有する容積調整可能手動ピペットが依然として必要とされている。本発明は、そのニーズに応えるものである。
【課題を解決するための手段】
【0010】
基本的には、本発明による容積調整可能なピペットは、ハウジング内をストップまで、およびストップから移動するために取り付けられたプランジャであって、ハウジングから延びる先端部内に流体を吸引するため、および先端部から流体を分配するためのプランジャを有している。ハウジング内を軸線方向に移動することができる容積設定部材がストップおよびピペットの容積設定を規定しており、この容積設定部材は、使用者が回すことができる容積調整部材によって軸線方向に移動させることが可能である。容積調整部材を回すことはまた、概略容積設定手段および精密容積設定手段を制御する。概略容積設定手段は、容積調整部材の比較的小さい回転に応答して容積設定部材を軸線方向に比較的長い距離を移動させ、また精密容積設定手段は、容積調整部材の比較的大きい回転に応答して容積設定部材を軸線方向に比較的短い距離を移動させる。したがって本発明によれば、容積調整部材を単純に連続的に回転させることによってピペットの容積が速やかに設定される。
【実施例】
【0011】
図に概略的に示すように、本発明は、(i)電子ディジタル・ディスプレイ14および関連する位置検出回路16ならびに制御回路18と、(ii)プランジャ・ユニット20と、(iii)ピペットの容積設定および電子ディスプレイを同時に制御するためのクイックセット容積アジャストメント機構22とを支持するハウジング12であって、手で保持することが可能な軸線方向に細長いハウジング12を有する容積調整可能な手動ピペット10を有している。
【0012】
プランジャ・ユニット20は、上向きのばね荷重がかけられて、ハウジング12内を軸線方向に移動するように支持されている。プランジャ・ユニット20の上端は、ハウジングの頂部の上に制御ノブ24を支持している。ハウジングの形状は、ピペットの使用者によって手で握られるような形状とされており、このとき使用者は親指を自由に使用して制御ノブ24を押し下げて、ピストン26を支えているプランジャ・ユニットの下端を下向きにシリンダ28の中へ移動させることによって、ハウジングの下端から延びる中空シャフト31に固着されたピペット先端部30から液体を分配することができる。
【0013】
基本的には、クイックセット容積アジャストメント機構22は、ハウジング12内におけるプランジャ・ユニット20の軸線方向の上向きの移動を制限する容積設定部材32であって、ピペット10の容積設定を画定するための容積設定部材32を有している。本発明によれば、容積設定部材32は、好適には、使用者による容積調整部材33の回転にのみ応答してハウジング12内を軸線方向に移動するように支持される。この点に関して、容積調整部材33の回転によって、概略容積設定手段34または精密容積設定手段35のいずれかが動作を開始する。概略容積設定手段34は、概略容積設定手段34が動作を開始すると、容積調整部材33の比較的小さい回転によって容積設定部材32の比較的大きい軸線方向の移動(つまり粗調整)が生成されるようにハウジング12内に支持されている。同様に、精密容積設定手段35は、精密容積設定手段35が動作を開始すると、容積調整部材33の比較的大きい回転によって容積設定部材32の比較的小さい軸線方向の移動(つまり微調整)が生成されるようにハウジング12内に支持されている。したがって容積調整部材33の連続的な回転を介して概略容積設定手段34および精密容積設定手段35を連続的にアクティブにすることにより、本発明によるピペットの使用者は容積調整部材を単純に回転させることによってピペットの容積を速やかに、且つ正確に設定および再設定することができる。これらの点に関して、容積調整部材33の連続的な回転は、概略容積設定手段34および精密容積設定手段35を連続的にアクティブにすることになる容積調整部材の回転として定義される。
【0014】
図1に示すピペット10に関して、より詳細には、ピペットのプランジャ・ユニット20は、ピストン・リターン38と底部ばね保持器40の間で圧縮されたリターンばね36によって上向きにばね荷重がかけられている。リターンばね36によって提供されるこの上向きのばね荷重によって、プランジャに固定されたフランジ部材42と、容積設定部材32を有する底または停止表面32sとが係合するまで、プランジャ・ユニット20がハウジング12内を上に向かって移動する。これらの点に関して、図1に示すように、ピペット10の容積設定部材32は、プランジャ20の六角形の中央部分48を軸線方向に受け入れる六角形の軸線方向のボア46を有するスリーブ44の下端を有している。スリーブ44は、細目雄ねじ山49tをその中央部分50に有する容積調整部材33を有している。図6A〜Dに最も明確に示すように、細目雄ねじ山49tは、軸線方向に延びる管状ねじ52の上端部51の細目雌ねじ山51tとかみ合うように設計されている。管状ねじ52は、ピペット10のハウジング12の開放上端56に取り付けらる従来の容積ロック55から下向きに軸線方向に延びる管状粗目ねじ山保持器54の粗目雌ねじ山54tとかみ合う粗目雄ねじ山53tをその中央部分53にさらに有している。以下で詳細に説明するように、図1〜6に示す本発明の実施例では、かみ合っている細目雄ねじ山49tおよび細目雌ねじ山51tは、精密容積設定手段35を有し、一方、かみ合っている粗目雄ねじ山53tおよび粗目雌ねじ山54tは、クイックセット容積アジャスティング機構22の概略容積設定手段34を有している。
【0015】
また、図1〜4に示すように、管状ねじ52は、容積設定部材32が管状ねじ52のねじ下端の下方に延びてフランジ42と係合し、ピペットの容積設定を規定する上部ストップとして機能するように、容積調整部材33を有するスリーブ44を軸線方向に受け入れている。
【0016】
また、スリーブ44は、細目ねじ山49tの上方で外側に放射状に段を形成しており、また容積ロック55内で垂直方向に上に向かって延びている。またスリーブ44は、制御ノブ24の下方でプランジャ20とスライド可能に係合するよう内側に突出したカラー57を備えている。このような構成により、容積ロック55が解放されると、制御ノブ24を回すことによって同じくスリーブ44が回転することになる。ねじ52に対するスリーブ44の初期回転位置に応じて、スリーブの初期回転によってスリーブをねじに対して回転させることができ、それによりねじ山49tがねじ山51tの上を上下に移動し、精密容積設定手段35の動作によって容積設定部材32の軸線方向の位置が微調整される。別法として、スリーブ44の初期回転によってスリーブをねじ52と共に回転させ、それによりねじ山53tをねじ山54tの上で上下に移動させ、概略容積設定手段34の動作によって容積設定部材32の軸線方向の位置を粗調整することも可能である。
【0017】
上で指摘したように、ねじ52に対するスリーブ44の初期回転位置によって、概略容積設定手段34または精密容積設定手段35のうちのどちらが最初に動作するかが決まる。この点に関して、図1〜4に示すクイックセット容積セッティング機構22の実施例の場合、概略容積設定手段34は、容積設定部材32の移動に対する力の閾値によって特徴づけられる。この閾値を超えるのは、精密容積設定手段35が容積調整部材33の回転に応答して所定の量だけ移動する場合のみである。例えば図2に示すように、管状粗目ねじ山保持器54の環状溝59に摩擦リング58が配置される。この摩擦リングは、摩擦リングによって定められる力の閾値に打ち勝つまでねじ52を担い、且つねじ回転を防止する。したがって概略容積設定手段34の力の閾値が打ち負かされない場合、プランジャ・ユニット24と共にスリーブ44(容積調整部材33)の初期回転によって、容積調整部材の回転方向に応じてねじ山49tがねじ山51tの上を上下に移動することになる。このねじ山49tの上下の移動によって容積設定部材32の垂直方向の微調整およびピペット10の容積設定が実施され、ねじ52は、摩擦リング58によって静止した状態を保持することになる。しかしながら、概略容積設定手段34の力の閾値が打ち負かされると、容積調整部材33の回転によって容積調整部材33と共にねじ52が回転することになる。この場合、容積調整部材33の回転方向に応じて、概略容積設定手段34の粗目ねじ山53tが管状粗目ねじ山保持器54の粗目ねじ山54tを上下に移動し、それにより容積設定部材32の垂直方向の粗調整およびピペット10の容積設定が実施される。
【0018】
図1〜4に示す本発明の実施例では、容積調整部材33の回転を使用して概略容積設定手段34の力の閾値に打ち勝つための手段は、容積調整部材33またはねじ52のいずれか一方の上に容積微調整リミッター60を有し、また容積調整部材33またはねじ52のもう一方の上にショルダ61を有している。図1〜4および図5Aに示す容積微調整リミッター60は、その下端に隣接している容積調整部材33のスリーブ44から外側に放射状に延びるピン60pを有している。ピン60pは、管状ねじ52の下端のアーク形の溝61gに載っており、溝の両端は、ショルダ61およびショルダ61’を画定している。例えばピン60pがショルダ61に対して図5Aの初期回転位置「3」にある場合、制御ノブ24を回すことによって容積調整部材33が図5Bの位置「4」まで反時計方向に初期回転すると、容積調整部材33は、摩擦リング58によって定められた力閾値に打ち勝ち、ねじ52およびスリーブ44が容積調整部材33と共に、図5Bに示す回転位置まで反時計方向に回転することになる。このような移動によって粗目ねじ山53tが静止粗目ねじ山54tの上に載り、ハウジング12内の容積設定部材32およびその停止表面32sの垂直方向の位置が粗調整され、また図6Dに示す管状粗目ねじ山保持器54に対するねじ52の上向きの移動で示すように、ピペット10の概略容積設定が実施される。次に、ピペットの使用者がピペット10のより細かい容積設定の調整を希望する場合、使用者は、制御ノブ24を時計方向に回すことによって容積調整部材33を単純に時計方向に回転させるだけでよい。容積調整部材33のこのような移動によってピン60pがショルダ61から離れ、細目ねじ山49tが静止細目ねじ山51tの上に載り、それによりハウジング12内の容積設定部材32および表面32sが垂直方向に微調整され、またピペットの容積が微設定される。
【0019】
しかしながら、例えばピン60pがショルダ61’に対して図5Aの初期回転位置「1」にある場合、容積調整部材33が例えば図5Bの「4」で示す反対側の位置まで時計方向に初期回転すると、容積調整部材33は、同じく、摩擦リング58によって定められた力閾値に打ち勝ち、ねじ52およびスリーブ44は共に、容積調整部材33と共に時計方向に回転することになる。このような移動によって粗目ねじ山53tが静止粗目ねじ山54tの上に載り、ハウジング12内の容積設定部材32およびその停止表面32sの垂直方向の位置が粗調整され、またピペット10の概略容積設定が実施される。次に、ピペットの使用者がピペット10のより細かい容積設定の調整を希望する場合、使用者は、制御ノブ24を反時計方向に回すことによって容積調整部材33を単純に反時計方向に回転させるだけでよい。容積調整部材33のこのような移動によってピン60pがショルダ61’から離れ、細目ねじ山49tが静止細目ねじ山51tの上に載り、ハウジング12内の容積設定部材32および表面32sが垂直方向に微調整され、またピペットの容積の微設定が実施される。
【0020】
当然、ピン60pが図5Aの位置「1」または位置「3」に対応する初期位置にあるか、あるいはそれらの間の任意の位置、例えば位置「2」にあり、且つピペット10の容積設定の微調整のみが望ましい場合、使用者は、制御ノブ24を回すことによって容積調整部材33を適切な反時計方向または時計方向に回転させることができ、図6A〜Cに示すように、細目ねじ山49tが静止細目ねじ山51tを上下に移動し、容積設定部材32およびその停止表面32sの所望の微調整が実施される。しかしながら、ピン60pが図5Aに示す位置「1」と「3」の間の初期位置、例えば位置「2」にあり、且つ使用者がピペット10の容積設定の大きな変更の実施を希望する場合、容積の設定を大きくする場合とあるいは小さくする場合に応じて、最初に容積調整部材33によって位置「1」または位置「3」までピン60pを回転させなければならない。ピン60pのそのような回転の間、精密容積設定手段35がアクティブにされる。ピン60pが位置「1」または「3」に到達すると、容積調整部材33およびピン60pを同じ方向に継続して回転させることによって精密容積設定手段35が動作を停止し、既に説明したように概略容積設定手段34がアクティブになる。容積調整部材33を継続して回転させることにより、容積設定部材32によって、所望の新しい容積設定またはそれを若干超える設定まで速やかに粗調整される。使用者は、続いて、容積調整部材33の回転方向を逆にすることによって概略容積設定手段34の動作を停止し、且つ精密容積設定手段35をアクティブにする。精密容積設定手段35がアクティブになると、使用者は、容積調整部材33を継続して回転させ、それにより、ピペットの所望の新しい容積設定まで容積設定部材32の微調整をもたらす。
【0021】
いずれの場合においても、上で説明したように容積調整部材33を回転させることによってピペットの所望の容積設定が達成されると、使用者は、ピペット10の所望の容積設定を設定することができる。これは、使用者が容積ロック55をアクティブにして容積調整部材33をハウジング12に対して固着することによって達成される。この点に関して、図面に示す従来の容積ロック55は、ハウジング12の開放端56を通して上に向かって延びるロック・ノブ62を有していてもよい。このロック・ノブ62は、ロック・ノブの広くなった環状上端63が制御ノブ24の直ぐ下のハウジング12の頂部の上に位置するように支持されている。上端63は、ロック・ノブ62を回すこと、および容積ロック55を解放するかあるいはアクティブにすることが望ましいときに、ピペットの使用者が指で握るために設計されている。この点に関して、円周状に間隔を隔てた複数のアーク形垂直突起64がロック・ノブ62から下に向かって延びており、突起64の各々が、管状保持器54によって支えられたアーク形垂直突起65であって、対応する円周状に間を隔てたアーク形垂直突起65の雄ねじ山65tと係合する雌ねじ山64tを備えている。図面をより分かり易くするために、図1〜4にはそれぞれ複数の突起64および突起65のうちの1つしか示されていない。図に示すように、突起64の各々は、下に向かって外側に傾斜したカム表面64cを含む。このカム表面64cは、個々の突起65上で、上に向かって内側に傾斜したカム表面65cとかみ合っている。また突起65各々の内部表面65iと、容積調整部材33を有するスリーブ44の放射状に広くなった部分の円筒状の外面とは緊密に一致している。このような構成により、ピペットの使用者がピペット10の容積設定のロックを希望する場合、使用者は、ねじ山64tと65tおよびカム表面64cと65cの協働作用によって内部表面65iがスリーブ44をくさび留めし、それによりハウジング12内における容積調整部材33の回転がロックされるよう、ロック・ノブ62を単純に握って第1の方向に回す。ピペットの使用者が容積ロック55の解放およびピペットの容積設定の調整を希望する場合、使用者は、ロック・ノブ58を単純に握り、反対方向に回す。この場合、ねじ山64tと65tの協働作用によってカム表面64cと65cが離れ、内部表面65iがスリーブ44から解放される。したがって容積調整部材33はハウジング内で自由に回転することができ、それにより上で説明した方法でピペットの容積設定が速やかに、且つ正確に調整される。所望の新しい容積設定が達成されると、上で説明したように容積ロック55が再びアクティブにされ、いつでもピペット10を操作してサンプル流体を吸引し、分配することができる。
【0022】
図2〜4は、ピペットを操作している間の様々な位置における事前容積設定ピペット10を示している。詳細には、図3には「ホーム・ポジション」にあるピペット10が示されている。ピペット10のホーム・ポジションは、ピペットがピペット先端部30への予め選択された量のサンプル流体の吸引を開始する位置であり、図3に示すホーム・ポジションから図2に示す「100%容積」位置へのプランジャ・ユニット20の移動によって、ピペットに固着されたピペット先端部30にサンプル流体が吸引される。このホーム・ポジションは、ホーム・スイッチ67と係合しているホーム・ポジション・コンタクト66によって画定される。図3に示すように、ホーム・ポジション・コンタクト66は、フランジ42から下に向かって延びるブロー・アウトばね68によって支えられており、一方、ホーム・スイッチ67は、ハウジング12の内側に延びる底部部分12’に配置された保持器69によって支持されている。ピペットの使用者がリターンばね36の上向きのばね力に対抗して制御ノブ24を押し下げ、それに応答してプランジャ・ユニット20がハウジング12内を下に向かって移動すると、ホーム・ポジション・コンタクト66とホーム・ポジション・スイッチ67とが係合する。ホーム・ポジション・スイッチ67は、リード線70によって、図1〜4および8に示す制御回路18の印刷回路基板71に電気接続されている。ホーム・ポジション・コンタクト66とホーム・ポジション・スイッチ67のこのような係合により、ピペットがそのホーム・ポジションにあることを示す信号が制御回路18に生成される。
【0023】
図4には、予め選択された量のサンプ流体がピペット先端部30から分配された後の「ブロー・アウト」位置にあるピペット10が示されている。図3と図4を比較して、ピペット10のブロー・アウト位置は、プランジャ・ユニット20がホーム・ポジションを通過して到達する位置であり、フランジ42の底がホーム・ポジション・コンタクト66の頂部に位置する位置であり、ブロー・アウトばね68がそれらの間で完全に圧縮されることを理解されたい。
【0024】
図2には、「100%容積」状態にあるピペット10が示されており、プランジャ・ユニット20は、フランジ部材42によって画定される最も上の位置にあり、リターンばね36の影響下で容積設定部材32の停止表面32sを上に向かって押し付けている。これは、ピペットの容積設定によって決定される事前設定量のサンプル流体をピペット先端部30に吸引した後のピペットの動作位置に対応する。図2およびピペット10の容積設定についての以上の説明から、ピペット10のこのような容積設定によって停止表面32sが容積設定部材32と共に垂直方向に移動することを理解されたい。またピペット10のこのような容積設定の間、リターンばね36の影響下でフランジ42が連続的に停止表面32sに押し付けられる。実際、このような容積設定手順の間、フランジは、停止表面32sと共に上下に移動する。したがってプランジャ・ユニット20は、ピペット10の容積を任意に調整している間、ハウジング内の容積設定部材32の垂直方向のあらゆる調整に追従する。容積設定部材32およびプランジャ・ユニット20のこのような垂直方向の移動は、制御回路18内で処理される電気信号を生成するセンサ回路16によって監視され、ピペットのディジタル容積設定としてディスプレイ14に視覚表示される。このような表示により、ピペット10の容積設定のあらゆる変化が速やかに表示され、このような容積設定の値がリアルタイムで監視される。
【0025】
より詳細には、図8は、ディスプレイ、センサ回路および制御回路をブロック図で示したものであり、図1〜4は、このような回路を支持している構造を示したものである。図8に示すように、電子ディジタル・ディスプレイ14は、制御回路18を有する従来のマイクロプロセッサによって制御される従来のLCDディスプレイを有していてもよい。図に示すように、マイクロプロセッサ18に対する電気入力は、ハウジング12の頂部に配置された手動ゼロ設定スイッチ72、および位置センサ73とホーム・ポジション・センサ74とを有するセンサによって構成することができる。
【0026】
位置センサ73は、フランジ部材42によって支えられているか、さもなければプランジャ・ユニット20に取り付けられたセンサ・ターゲット75を備えた連続検出デバイスである。この点に関して、センサ16は、特定のタイプのセンサ・ターゲット75の位置を検出することができるタイプのセンサである。例えばセンサ・ターゲット75が磁石である場合、センサは、磁石によって生成される磁界に応答して、センサに対する磁石の位置を表す電気信号を生成することができるタイプのセンサである。このような位置信号は、ディスプレイ14がディジタル表示する数値を制御するためにディスプレイ14に対する電気入力を処理および制御するマイクロプロセッサ18に送信される。したがってピペット10が吸引モード、分配モードおよび他のモードで動作している間、ピペット先端部内の液体の量のリアルタイムな読み値が連続的に提供される。また上で説明した方法でピペットの容積を設定している間、フランジ42が容積設定部材32の停止表面32sに押し付けられている場合、すなわちピペット10が図2に示す100%容積位置にある場合、ディスプレイ14にディジタル表示されるリアルタイム値は、ピペット10の容積設定である。
【0027】
図3および図8を参照すると、ホーム・ポジション・センサ74の場合、図3に関連して上で説明したように、ホーム・ポジション・スイッチ67と係合しているホーム・ポジション・コンタクト66によって画定されるホーム・ポジションにプランジャ・ユニット20が位置している場合にホーム・ポジションが検出される。図3に示すように、ホーム・ポジション・コンタクト66は、フランジ42から下に向かって延びるブロー・アウトばね68によって支えられており、一方、ホーム・スイッチ67は、ハウジング12の内側に延びる底部部分12’に配置された保持器69によって支持されている。ピペットの使用者がリターンばね36の上向きのばね力に対抗して制御ノブ24を押し下げ、それに応答してプランジャ・ユニット20がハウジング12内を下に向かって移動すると、ホーム・ポジション・コンタクト66とホーム・ポジション・スイッチ67が係合する。ホーム・ポジション・スイッチ67は、リード線70によって、図1〜4および図8に示す制御回路18の印刷回路基板71に電気接続されている。ホーム・ポジション・コンタクト66とホーム・ポジション・スイッチ67とのこのような係合により、ピペットがそのホーム・ポジションにあることを示す信号が制御回路18を有するマイクロプロセッサに生成され、リード線76によってディスプレイ14に適用されて表示される。マイクロプロセッサは、例えば、ホーム・ポジションが検出されると「ゼロ」をディスプレイ14に表示する電気信号が生成されるようにプログラムすることができる。この場合、ホーム・ポジションの上方および下方のプランジャ・ユニット20の移動は、ディスプレイ14にディジタル表示される正および負の値によって示される。
【0028】
手動ゼロ設定スイッチ72は、ピペットの使用者がスイッチを手動でアクティブにすることによってディスプレイ14に表示されるディジタル量がゼロになるよう、リボン・ケーブル(図示せず)によってマイクロプロセッサに電気接続された従来のスイッチである。この機能は、ピペットの使用者が複数の液体をピペット先端部30に吸引することを希望する場合、あるいはマルチ分配動作モードのピペットで容量いっぱいの先端部の含有量を複数に当分割して分配することを希望する場合に有用である。
【0029】
例えば、希釈剤を使用して1つのサンプルを希釈する場合、使用者は最初に、ピペット10の最大ピックアップ量を、ピックアップすべきすべての流体の合計に設定することになる。使用者は次に、ピペット先端部30を希釈剤の中に挿入し、ディスプレイ14に表示される希釈剤の量の読み値が所望の量になるまでプランジャ・ボタン24を慎重に解放することになる。ディスプレイ14に表示される希釈剤の量の読み値が所望の量になると、使用者は、希釈剤貯蔵容器からピペット先端部を取り除き、手動ゼロ・スイッチ66を押して、表示された量を「ゼロ」にすることになる。次に、ピペット先端部を空中に保持している間、使用者は、サンプル液と希釈剤を分離するべく、所望する量のエア・ギャップをピペット先端部内に吸い込むことができるよう、プランジャを解放することになる。最後に、使用者は、表示を再度「ゼロ」にし、所望のサンプル量の液体をピペット先端部内に吸引することになる。
【0030】
マルチ分配動作モードのピペット10の場合、ピペットの使用者は、個々のアリコート(当分割)を開始する時点でゼロ・スイッチを押すことになり、ディスプレイは、ゼロ点に対する分配量を負の量の数字で表示することになる。
【0031】
次に、図9〜14に示す本発明の第2の実施例について説明する。第2の実施例は、ピペット10の基本構造に関連して上で説明した実施例と類似しているが、10’で示すピペットのクイックセット機構として遊星歯車機構22’を含む点で、上で説明した実施例と異なっている。ピペット10’の対応する要素は、ピペット10の参照数字と同じ数字で示されており、ここではピペット10’に対する詳細な説明は省略する。
【0032】
基本的には、ピペット10’は、(i)電子ディジタル・ディスプレイ14および関連する位置検出回路16ならびに制御回路18と、(ii)プランジャ・ユニット20と、(iii)ピペットの容積設定および電子ディスプレイを同時に制御するためのクイックセット容積アジャストメント機構22’とを支持する、手で保持することができる軸線方向に細長いハウジング12を有するディジタル調整可能手動エアーディスプレイスメント式ピペットを有している。
【0033】
プランジャ・ユニット20は、上向きのばね荷重がかけられており、ハウジング12内を軸線方向に移動するように支持される。プランジャ・ユニット20の上端は、ハウジングの頂部の上方に制御ノブ24を支持する。ハウジングの形状は、ピペットの使用者が手で握るような形状とされており、それによって使用者は、親指を自由に使用して制御ノブ24を押し下げ、ピストン26を支えているプランジャ・ユニットの下端を下向きにシリンダ28の中へ移動させることによって、ハウジングの下端から延びる中空シャフト31に固着されたピペット先端部30から液体を分配する。
【0034】
基本的には、クイックセット容積アジャストメント機構22’は、ハウジング12内におけるプランジャ・ユニット20の軸線方向の上向きの移動を制限する、ピペット10’の容積設定を画定するための容積設定部材32’を有している。本発明によれば、容積設定部材32’は、好適には、使用者による容積調整部材33’の回転にのみ応答してハウジング12内を軸線方向に移動するように支持されている。この点に関して、容積調整部材33’の回転によって、概略容積設定手段34’または精密容積設定手段35’のいずれかが動作を開始する。概略容積設定手段34’は、概略容積設定手段34’が動作を開始すると、容積調整部材33’の比較的小さい回転によって容積設定部材32’の比較的大きい軸線方向の移動(すなわち粗調整)が生成されるようにハウジング12内に支持されている。同様に、精密容積設定手段35’は、精密容積設定手段35’が動作を開始すると、容積調整部材33’の比較的大きい回転によって容積設定部材32’の比較的小さい軸線方向の移動(すなわち微調整)が生成されるようにハウジング12内に支持されている。したがって容積調整部材33’の連続的な回転を介して概略容積設定手段34’および精密容積設定手段35’を連続的にアクティブにすることにより、ピペット10’の使用者は、容積調整部材33’を単純に回転させることによってピペット10’の容積設定を速やかに、且つ正確に設定および再設定することができる。
【0035】
図9〜11および図14に示すピペット10’に関して、より詳細には、ピペットのプランジャ・ユニット20は、ピストン・リターン38と底部ばね保持器40の間で圧縮されるリターンばね36によって、上向きにばね荷重がかけられている。リターンばね36によって提供されるこの上向きのばね荷重によって、プランジャに固定されてたフランジ部材42と容積設定部材32’の底または停止表面32s’とが係合するまで、プランジャ・ユニット20がハウジング12内を上に向かって移動する。これらの点に関して、例えば図9に示すように、ピペット10’の容積設定部材32’は、粗目雄ねじ山53tをその中央部分53に有し、且つプランジャ20の六角形の中央部分48を受け入れている円筒状の軸線方向のボア52bを有する、軸線方向に延びる管状ねじ52’の下端を有している。粗目雄ねじ山53tは、保持器69に固着された、ハウジング12から内側に横方向に延びる固定フォロワ・アーム80とかみ合っている。このような構成のため、制御ノブ24を回しても、それによって管状ねじ52’が直接回転することはない。しかしながら、管状ねじ52’が回転すると、管状ねじ52’がハウジング内を固定フォロワ・アーム80上で軸線方向に移動し、それにより停止表面32s’の垂直方向の位置およびピペット10’の容積設定が調整される。既に指摘したように、管状ねじ52’のこのような回転は、プランジャ20の中央部分48の六角形の外部表面とかみ合う六角形の内部表面を有するスリーブ44’をピペット10’内に有する容積調整部材33’の回転によって生じる。このような構成により、制御ノブ24およびプランジャ20を回転させることによって生じるスリーブ44’の回転によって、概略容積設定手段34’または精密容積設定手段35’のいずれかがアクティブにされ、容積設定部材32’の停止表面32s’の軸線方向の位置が調整され、延いてはピペット10’の容積設定が調整される。
【0036】
ピペット10’の中に包含されたクイックセット容積アジャストメント機構22’の場合、概略容積設定手段34’および精密容積設定手段35’は、遊星歯車機構の中で具体化される。この遊星歯車機構は、水平方向に延び且つスリーブ44’の下端部分によって支持された太陽歯車81、および水平方向に延び且つ管状ねじ52’の頂部に固着された遊星歯車キャリア82を有し、また円周状に間を隔てた複数の遊星歯車83を支持している。遊星歯車の各々は、太陽歯車81、および水平方向に延びるリング歯車84であって、スリーブ44’に固着された細い垂直方向の円筒歯車ハウジング85内に捕獲されたリング歯車84とかみ合っている。
【0037】
円筒歯車ハウジング85内の垂直方向のスロット86(図12参照)は、ハウジング12に固着された摩擦条片87であって、垂直方向に延び、且つリング歯車84の半径方向の最も外側の表面と係合している摩擦条片87を受け入れている。したがって精密容積設定手段35’の所定の回転によって打ち負かされる力の閾値が、ピペット10’内の概略容積設定手段34’に対して定められる。この点に関して、精密容積設定手段35’は、太陽歯車81および静止リング歯車84の上に載っている遊星歯車83を有し、一方、概略容積設定手段34’は、精密容積設定手段35’が動作することによって力の閾値を超えた後の、上で説明した遊星歯車機構を有している。
【0038】
詳細には、摩擦条片87によって定められた力の閾値が打ち負かされていない場合、制御ノブ24およびプランジャ20を回転させることによって容積調整部材33’が回転し、それに対応して太陽歯車81が回転し、且つ静止リング歯車84上で遊星歯車83が回転することになる。遊星歯車83は、管状ねじ52’に固着された遊星歯車キャリア82によって支持されているため、管状ねじ52’は、遊星歯車が静止リング歯車83に沿って移動すると、比較的低速で回転することになる。粗目ねじ山53tが静止フォロワ・アーム80の上に載っているため、環状ねじ52’のこの比較的低速の回転によって容積設定部材32’が垂直方向に比較的短い距離を移動し、ピペット10’の容積設定が微調整される。
【0039】
摩擦条片87によって定められた力の閾値が打ち負かされると、容積調整部材33’が回転し、それに対応して太陽歯車81、遊星歯車キャリア82およびリング歯車84が比較的高速で回転し、遊星歯車83が太陽歯車とリング歯車の間で非回転状態になる。粗目ねじ山53tが静止フォロワ・アーム80の上に載っているため、遊星歯車機構におけるこのような組合せ歯車の回転によって容積設定部材32’が垂直方向に比較的長い距離を移動し、ピペット10’の容積設定が粗調整される。
【0040】
ピペット10’の場合、摩擦条片87および概略容積設定手段34’に関連する力の閾値に打ち勝つための手段は、容積調整部材33’の回転を使用して精密容積設定手段35’の所定の回転に応答する手段を有している。詳細には、図9〜11および図14に示す本発明の実施例では、容積調整部材33’の回転を使用して概略容積設定手段34’の力の閾値に打ち勝つための手段は、容積調整部材33’または歯車ハウジング85のいずれか一方の上に容積微調整リミッター60’を有し、また容積調整部材33’または歯車ハウジング85のもう一方の上にショルダ61を有している。図9〜12に示す容積微調整リミッター60’は、遊星歯車83の直ぐ上方の容積調整部材33’のスリーブ44’から外側に放射状に延びる水平プレート88から上に向かって延びているピン60p’を有している。ピン60p’は、歯車ハウジング85の水平方向の頂部89のアーク形の溝61g’に載っており、溝の両端は、ショルダ61およびショルダ61’を画定している。例えばピン60pがショルダ61に対して図12および図13Cの初期回転位置「3」にある場合、制御ノブ24を回すことによって容積調整部材33’が図12および図13Dの位置「4」まで反時計方向に初期回転すると、容積調整部材33’は、摩擦条片87によって定められる力閾値に打ち勝つことになる。容積調整部材33’が力閾値に打ち勝つと、歯車ハウジング85、リング歯車84、ねじ52’、遊星歯車83および太陽歯車81が容積調整部材33’と共に、図13Dに示す回転位置まで反時計方向に回転することになる。このような移動によって粗目ねじ山53tが静止コース・フォロワ・アーム80の上に載り、それによりハウジング12内の容積設定部材32’およびその停止表面32s’の垂直方向の位置が粗調整される。また、それにより、図14に示すフォロワ・アーム80に対するねじ52’の上向きの移動で示すように、ピペット10の概略容積設定が実施される。次に、ピペットの使用者がピペット10’のより細かい容積設定の調整を希望する場合、使用者は、制御ノブ24を時計方向に回すことによって容積調整部材33’を単純に時計方向に回転させるだけでよい。容積調整部材33’のこのような時計方向の移動によってピン60p’がショルダ61から離れ、またこの時計方向の移動に対応して太陽歯車81が図13Bに示す位置「2」まで時計方向に回転する。太陽歯車81が図13Bに示す位置「2」まで時計方向に回転すると、遊星歯車83が静止リング歯車84の上を回転してねじ52’が回転し、それによりハウジング12内の容積設定部材32’および表面32s’が垂直方向に微調整され、またピペット10’の容積が微設定される。
【0041】
しかしながら、例えばピン60p’がショルダ61’に対して図12および図13Aの初期回転位置「1」にある場合、容積調整部材33’が例えば図12および図13Dの「4」で示す反対側の位置まで時計方向に初期回転すると、容積調整部材33’は、同じく、摩擦条片87によって定められる力閾値に打ち勝つことになる。容積調整部材33’が力閾値に打ち勝つと、歯車ハウジング85、リング歯車84、ねじ52’、遊星歯車83および太陽歯車81が容積調整部材33’と共に時計方向に回転することになる。このような移動によって粗目ねじ山53tが静止フォロワ・アーム80の上に載り、それによりハウジング12内の容積設定部材32’およびその停止表面32s’の垂直方向の位置が粗調整される。また、それにより、フォロワ・アーム80に対するねじ52’の下向きの移動を使用してピペット10’の概略容積設定が実施される。次に、ピペットの使用者がピペット10’のより細かい容積設定の調整を希望する場合、使用者は、制御ノブ24を反時計方向に回すことによって容積調整部材33’を単純に反時計方向に回転させるだけでよい。容積調整部材33’のこのような反時計方向の移動によってピン60p’がショルダ61から離れ、またこの反時計方向の移動に対応して太陽歯車81が図13Bに示す位置「2」まで反時計方向に回転する。太陽歯車81が図13Bに示す位置「2」まで反時計方向に回転すると、遊星歯車83が静止リング歯車84の上を回転してねじ52’が回転し、それによりハウジング12内の容積設定部材32’および停止表面32s’が垂直方向に微調整され、またピペット10’の容積が微設定される。
【0042】
当然、ピン60p’が図12の位置「1」または位置「3」に対応する初期位置にあるか、あるいはそれらの間の任意の位置、例えば位置「2」にあり、且つピペット10’の容積設定の微調整のみが望ましい場合、使用者は、制御ノブ24を回すことによって容積調整部材33’を適切な反時計方向または時計方向に回転させることができる。容積調整部材33’が反時計方向または時計方向に回転すると、太陽歯車81が同じ方向に回転して遊星歯車83が静止リング歯車84の上で回転し、それにより容積設定部材32’およびその停止表面32s’の所望の微調整が実施される(図13A〜Cに示す遊星歯車83の回転位置と比較されたい)。しかしながら、ピン60p’が図12に示す位置「1」と「3」の間の初期位置、例えば位置「2」にあり、且つ使用者がピペット10’の容積設定の大きな変更の実施を希望する場合、容積の設定を大きくする場合とあるいは小さくする場合に応じて、最初に、容積調整部材33’によって位置「1」または位置「3」までピン60p’を回転させなければならない。ピン60p’のそのように回転の間、精密容積設定手段35’がアクティブにされる。ピン60p’が位置「1」または「3」に到達すると、容積調整部材33’およびピン60p’を同じ方向に継続して回転させることによって精密容積設定手段35’が動作を停止し、既に説明したように概略容積設定手段34’がアクティブにされる。容積調整部材33’を継続して回転させることにより、容積設定部材32’によって、所望の新しい容積設定またはそれを若干超える設定まで速やかに粗調整される。使用者は、続いて、容積調整部材33’の回転方向を逆にすることによって概略容積設定手段34’の動作を停止し、且つ精密容積設定手段35’をアクティブにすることができる。精密容積設定手段35’がアクティブにすると、使用者は、容積調整部材33’を継続して回転させることができ、容積設定部材32’によって、ピペット10’の所望の新しい容積設定まで微調整される。
【0043】
いずれの場合においても、上で説明したように、容積調整部材33’を回転させることによってピペット10’の所望の容積設定が達成されると、使用者は、ピペット10’の所望の容積設定を設定することができる。これは、使用者が容積ロック55’をアクティブにして容積調整部材33’をハウジング12に対して固着することによって達成される。この点に関して、図9〜11および図14に示す容積ロック55’は、ハウジング12の開放端56を通して上に向かって延びるロック・ノブ62’を有していてもよい。このロック・ノブ62’は、ロック・ノブの広くなった環状上端63が制御ノブ24の直ぐ下のハウジング12の頂部の上方に位置するように支持される。上端63は、ロック・ノブ62’を回すこと、および容積ロック55’を解放するかあるいはアクティブにすることが望ましいときに、ピペットの使用者によって指で握られるように設計されている。この点に関して、円周状に間を隔てた複数のアーク形垂直突起64’がロック・ノブ62’から下に向かって延びており、突起64’の各々は、ハウジング12のアーク形垂直内部側壁65wの雌ねじ山65t’と係合する雄ねじ山64t’を有して。図面をより分かり易くするために、図9〜11および図14にはそれぞれ複数の突起64’のうちの1つしか示されていない。図に示すように、突起64’の各々は、下に向かって外側に傾斜しているカム表面64cを有している。このカム表面64cは、ハウジング12の内壁から延びる突起65’の上で、上に向かって内側に傾斜しているカム表面65cとかみ合っている。また、突起65’の各々の内部表面65i’と、容積調整部材33’を備えたスリーブ44’の放射状に広くなった部分の円筒状の外面とは緊密に一致している。このような構成により、ピペットの使用者がピペット10’の容積設定のロックを希望する場合、使用者は、ねじ山64t’と65t’およびカム表面64cと65cの協働作用によって内部表面65i’がスリーブ44’をくさび留めし、ハウジング12内における容積調整部材33’の回転がロックされるよう、ロック・ノブ62’を単純に握って第1の方向に回す。ピペットの使用者が容積ロック55’の解放およびピペットの容積設定の調整を希望する場合、使用者は、ロック・ノブ62’を単純に握って、反対方向に回すことになる。この場合、ねじ山64t’と65t’の協働作用によってカム表面64cと65cが離れ、内部表面65i’がスリーブ44’から解放される。したがって容積調整部材33’はハウジング内で自由に回転することができ、上で説明した方法でピペットの容積設定が速やかに、且つ正確に調整される。所望の新しい容積設定が達成されると、上で説明したように容積ロック55’が再びアクティブにされ、いつでもピペット10’を操作してサンプル流体を吸引し、分配することができる。
【0044】
図9〜11は、ピペットを操作している間の様々な位置における事前容積設定ピペット10’を示したものである。詳細には、図10には「ホーム・ポジション」にあるピペット10’が示されている。ピペット10’のホーム・ポジションは、図10に示すホーム・ポジションから図9に示す「100%容積」位置へのプランジャ・ユニット20の移動によって、ピペットが、ピペットに固着されたピペット先端部への予め選択された量のサンプル流体の吸引を開始する位置である。このホーム・ポジションは、ホーム・スイッチ67と係合しているホーム・ポジション・コンタクト66によって画定される。図10に示すように、ホーム・ポジション・コンタクト66は、フランジ42から下に向かって延びるブロー・アウトばね68によって支えられており、一方、ホーム・スイッチ67は、ハウジング12の内側に延びる底部部分12’に配置された保持器69によって支持されている。ピペットの使用者がリターンばね36の上向きのばね力に対抗して制御ノブ24を押し下げ、それに応答してプランジャ・ユニット20がハウジング12内を下に向かって移動すると、ホーム・ポジション・コンタクト66とホーム・ポジション・スイッチ67とが係合する。ホーム・ポジション・スイッチ67は、リード線70によって、図9〜11および図8に示す制御回路18の印刷回路基板71に電気接続されている。ホーム・ポジション・コンタクト66とホーム・ポジション・スイッチ67のこのような係合により、ピペットがそのホーム・ポジションにあることを示す信号が制御回路18に生成される。
【0045】
図11には、予め選択された量のサンプル流体がピペット先端部から分配された後の「ブロー・アウト」位置にあるピペット10’が示されている。図10と図11を比較して、ピペット10’のブロー・アウト位置は、プランジャ・ユニット20がホーム・ポジションを通過して到達する位置であり、フランジ42の底がホーム・ポジション・コンタクト66の頂部に位置する位置であり、ブロー・アウトばね68がそれらの間で完全に圧縮されることを理解されたい。
【0046】
図9には、「100%容積」状態にあるピペット10’が示されており、プランジャ・ユニット20は、フランジ部材42によって画定された最も上の位置にあり、リターンばね36の影響下で容積設定部材32’の停止表面32s’を上に向かって押し付けている。これは、ピペットの容積設定によって決定される事前選択量のサンプル流体をピペット先端部に吸引した後のピペットの動作位置に対応している。図2およびピペット10’の容積設定についての以上の説明から、ピペット10のこのような容積設定によって停止表面32s’が容積設定部材32’と共に垂直方向に移動することを理解されたい。また、ピペット10’のこのような容積設定の間、リターンばね36の影響下でフランジ42が連続的に停止表面32s’に押し付けられる。実際、このような容積設定手順の間、フランジは、停止表面32s’と共に上下に移動する。したがってプランジャ・ユニット20は、ピペット10’の容積を任意に調整している間、ハウジング内の容積設定部材32’の垂直方向のあらゆる調整に追従する。容積設定部材32’およびプランジャ・ユニット20のこのような垂直方向の移動は、制御回路18内で処理される電気信号を生成するセンサ回路16によって監視され、ピペットのディジタル容積設定としてディスプレイ14に視覚表示される。このような表示により、ピペット10’の容積設定のあらゆる変化が速やかに表示され、このような容積設定の値がリアルタイムで監視される。
【0047】
より詳細には、図8は、ディスプレイ、センサ回路および制御回路をブロック図で示したもので、このブロック図に関連して説明されており、一方、図9〜11は、このような回路を支持している構造を示したものである。
【0048】
上で説明した本発明の2つの好ましい実施例のいずれの場合においても、図に示すピペットの容積設定を監視および表示するための手段は、電子ディスプレイ・システムを有している。本発明には、本発明の好ましい実施例に機械式ディスプレイ・システムを含むことができることが意図されている。この点に関して、図15は、このような機械式ディスプレイ・システムの一実施例を備えた図11に示すピペット10’を示したものである。詳細には、図に示すように、図15のピペット10’は、ハウジング12の側面の窓92に面した数字支持外部表面91を有する比較的大きい従来のカウンタ・ホイール90を含んでいる。カウンタ・ホイール90は、数表示69’で示す保持器69の円筒状バージョンの頂部に支持されている。またカウンタ・ホイール90は、容積設定部材32’を有する管状ねじ52’と共に回転するように取り付けられている。この点に関して、キー94はカウンタ・ホイールの内部ハブから内側に延びており、また管状ねじ52’の中を垂直方向に延びているキーウェイ95に載っている。このような構成により、カウンタ・ホイール90は、図9〜11および図14に関連して上で説明した方法でピペット10’の容積設定を調整する際に、管状ねじ52’と共に回転することになる。カウンタ・ホイール90が回転すると、ピペットの使用者に見えるよう、ピペット10’の容積設定を示す異なる数字が窓91を通して表示される。
【0049】
また図16に示す本発明の実施例も、参照数字10”で示す改変型バージョンのピペット10’の中に機械式容積ディスプレイ・システムを有している。ピペット10”は、上で説明したピペット10’と類似しているが、クイックセット・システム22’と、比較的細目の雄ねじ山53t”を支持するねじ52”を有する改変型容積設定部材32”とを有する反転バージョンの遊星歯車機構を含む点でピペット10’と異なる。
【0050】
より詳細には、反転遊星歯車機構は、容積調整部材33’を有するスリーブ44’の下端で放射状に外側に延びる水平フランジの形態の遊星歯車キャリア82’を有している。円周状に間を隔てた複数の遊星歯車83’が、遊星歯車キャリア82’によって支持され、且つ遊星歯車キャリア82’の下方に延び、それによって容積調整部材33’を有するねじ52”の上部部分に固着された太陽歯車81’とかみ合っている。また遊星歯車83’は、歯車ハウジング85’によって支持された、外側に水平方向に延びるリング歯車84’とかみ合っている。
【0051】
図16に示すように、摩擦リング96は、遊星歯車キャリア・プレート82’と歯車ハウジング85’との間に捕獲され、概略容積設定手段35”に対する力の閾値を定めている。この力の閾値は、リング歯車84’が遊星歯車83’に対して回転することができるようになる前に、作動状態の精密容積設定手段35’を使用した容積調整部材33’の所定の回転によって打ち負かされなければならない。上で説明した実施例の場合と同様、この力の閾値は、リミッター60”とショルダ61”の協働動作によって打ち負かされる。
【0052】
図17に示すように、リミッター60”は、ピペット10”内に、ハウジング12の内側から延びる内側ストップ97であって、リング歯車84”に固定された歯車ハウジング85’の外部表面のアーク形の溝98に載っている内側ストップ97を有している。溝の両端はショルダ61”を画定している。動作に関しては、太陽歯車81’、遊星歯車83’およびリング歯車84’が図17に示す位置にある場合、精密容積設定手段35”が動作状態になり、制御ノブ24およびプランジャ20の回転によって容積調整部材33’が回転し、それにより遊星歯車83’およびリング歯車84’がユニットとして回転し、それに対応して太陽歯車81’が回転することになる。太陽歯車81’はねじ52”に固定されているため、ねじ52”は、静止フォロワ・アーム80の上に載っている細目ねじ山53t”と同様の方法で低速で回転し、それにより停止表面32s’の垂直方向の位置が微調整され、延いてはピペット10”の容積設定が微調整される。
【0053】
ピペット10”の容積設定のこのような微調整は、内側ストップ97がいずれか一方のショルダ61”と係合するまで継続される。内側ストップ97がいずれか一方のショルダ61”と係合すると、精密容積設定手段35”の動作が停止し、概略容積設定手段34”がアクティブになる。これは、容積調整部材33’が継続して回転することにより、内側ストップ97がいずれか一方のショルダ61”にもたれかかることによって生じ、その結果、摩擦リング96によって定められた力閾値に打ち勝ってリング歯車84’が遊星歯車83’に対して回転し、容積設定部材33’が回転を継続する。リング歯車84’が遊星歯車83’に対して回転し、容積設定部材33’が回転を継続すると、容積調整部材33’によってリング歯車84’が回転し、それにより遊星歯車83’が回転して太陽歯車81’が高速で駆動される。細目ねじ山53t”は静止フォロワ・アーム80の上に載っているため、太陽歯車81’が駆動されると、ねじ52”がより高速で回転し、それに対応してねじ52”がより高速で垂直方向に移動する。すなわち、ねじ52”が粗調整され、ピペット10”の容積設定が調整される。
【0054】
上で説明した本発明の実施例の場合と同様、ピペット10”の容積設定のこのような粗調整に続いて容積設定の微調整を実施することができる。これは、容積調整部材33’を単純に逆方向に回転させることによって達成することができる。容積調整部材33’が逆方向に回転すると、内側ストップ97がショルダ61”から離れ、概略容積設定手段34”の動作が停止し、精密容積設定手段35”が再びアクティブにされる。精密容積設定手段35”が再びアクティブにされると、容積調整部材33’が逆方向の回転を継続し、その結果、リング歯車84’および遊星歯車83’がユニットとして回転し、それにより太陽歯車81’およびねじ52”がより低速で回転し、上で説明した方法でハウジング12内の停止表面32s’の垂直方向の位置が微調整され、ピペット10”の容積設定が微調整される。
【0055】
図16に示すピペット10”の場合、ピペットの容積設定の粗調整および微調整は、図に示す機械式ディスプレイ・システムによって視覚表示される。図に示すように、機械式ディスプレイ・システムは、内側に延びる歯車がねじ52”の外部表面の垂直スプライン(図示せず)とかみ合う保持器69によって支持された、水平方向に延びる二重リング歯車100を有している。このような構造により、ピペット10”の容積設定を上で説明したように調整している間、ねじ52”が回転し、それにより二重リング歯車100が回転する。二重リング歯車100の外側に延びる歯車は、平歯車カウンタ・ホイール102およびそれに類似したホイール106、108を有する標準ホイール機械式カウンタ104の平歯車カウンタ・ホイール102とかみ合っている。従来の方法では、カウンタ・ホイールは、平歯車カウンタ・ホイール102が二重平歯車100と共に回転するように構築され、組み立てられている。ホイール106は、平歯車カウンタ・ホイール102が1回転する毎に1ユニット回転し、一方、ホイール108は、ホイール106が1回転する毎に1ユニット回転する。ホイール102、106および108は、ピペット10”の使用者に提供されたディジタル・ディスプレイに、ハウジング12内のカウンタ104によって窓110を通して、ユニット、10および100の表示を提供する。
【0056】
以上、本発明の特定の実施例について詳細に示し、説明してきたが、本発明の精神を逸脱することなく、上で説明した実施例に変更および改変を加えることができることを理解されたい。したがって本発明の範囲は、特許請求の範囲の各請求項によってのみ限定されるものとする。
【図面の簡単な説明】
【0057】
【図1】電子ディジタル・ディスプレイおよび関連する位置検出回路ならびに制御回路と、プランジャ・ユニットと、本発明によるクイックセット容積アジャストメント機構の第1の実施例とを支持するハウジングであって、手で保持することができる軸線方向に細長いハウジングを有する容積調整可能手動ピペットの部分側断面図である。
【図2】図1に示す容積調整可能手動ピペットの上部部分の「100%容積」位置における部分拡大側断面図である。
【図3】容積調整可能手動ピペットが「ホーム」位置にある図2と同様の部分拡大側断面図である。
【図4】容積調整可能手動ピペットが「ブロー・アウト」位置にある図2と同様の部分拡大側断面図である。
【図5A】容積設定部材を微調整している間の異なる回転位置における容積調整部材を示す、A−Aの方向から見た図2に示すクイックセット機構の一部の拡大断面上面図である。
【図5B】容積設定部材を粗調整している間の回転位置における容積調整部材を示す、A−Aの方向から見た図2に示すクイックセット機構の一部の拡大断面上面図である。
【図6A】図5Aおよび図5Bに示す回転位置における容積調整部材の垂直方向の位置を示す、6−6のラベルが振られた図2の卵形線内に示されているクイックセット機構の一部の拡大側断面図である。
【図6B】図5Aおよび図5Bに示す回転位置における容積調整部材の垂直方向の位置を示す、6−6のラベルが振られた図2の卵形線内に示されているクイックセット機構の一部の拡大側断面図である。
【図6C】図5Aおよび図5Bに示す回転位置における容積調整部材の垂直方向の位置を示す、6−6のラベルが振られた図2の卵形線内に示されているクイックセット機構の一部の拡大側断面図である。
【図6D】図5Aおよび図5Bに示す回転位置における容積調整部材の垂直方向の位置を示す、6−6のラベルが振られた図2の卵形線内に示されているクイックセット機構の一部の拡大側断面図である。
【図7】7−7のラベルが振られた図1の円内の部分の拡大図である。
【図8】図1に示す、すべて本発明による電子ディスプレイおよび関連するセンサ回路ならびに制御回路を有する典型的な電子回路のブロック図である。
【図9】「100%容積」位置にあり、且つ電子ディジタル・ディスプレイおよび関連する位置検出回路ならびに制御回路と、プランジャ・ユニットと、本発明によるクイックセット容積アジャストメント機構の第2の実施例または遊星歯車箱実施例とを支持するハウジングであって、手で保持することができる軸線方向に細長いハウジングを有する容積調整可能手動ピペットの上部部分の部分側断面図である。
【図10】図9に示す容積調整可能手動ピペットの「ホーム」位置における部分側断面図である。
【図11】図9に示す容積調整可能手動ピペットの「ブロー・アウト」位置における部分側断面図である。
【図12】異なる回転位置における容積調整部材を示す、B−Bの方向から見た図9に示すクイックセット機構の一部の拡大断面上面図である。
【図13A】図9に示す遊星歯車箱の太陽歯車とリング歯車の間の遊星歯車の、図12に示す回転位置毎の異なる回転位置を示すために、リング歯車カバーの一部が取り外された図12に示すクイックセット機構の一部の拡大断面上面図である。
【図13B】図9に示す遊星歯車箱の太陽歯車とリング歯車の間の遊星歯車の、図12に示す回転位置毎の異なる回転位置を示すために、リング歯車カバーの一部が取り外された図12に示すクイックセット機構の一部の拡大断面上面図である。
【図13C】図9に示す遊星歯車箱の太陽歯車とリング歯車の間の遊星歯車の、図12に示す回転位置毎の異なる回転位置を示すために、リング歯車カバーの一部が取り外された図12に示すクイックセット機構の一部の拡大断面上面図である。
【図13D】図9に示す遊星歯車箱の太陽歯車とリング歯車の間の遊星歯車の、図12に示す回転位置毎の異なる回転位置を示すために、リング歯車カバーの一部が取り外された図12に示すクイックセット機構の一部の拡大断面上面図であって、容積設定部材を粗調整している間のリング歯車の回転運動を示す拡大断面上面図である。
【図14】容積設定部材を粗調整している間の、図13Cに示す位置と図13Dに示す位置との間の容積調整部材の回転運動を使用した容積設定部材の垂直方向の移動を示す、クイックセット機構の一部の拡大垂直側断面図である。
【図15】図9に示す容積調整可能手動ピペットと類似した、本発明によるクイックセット容積アジャストメント機構の遊星歯車箱実施例を含む容積調整可能手動ピペットであって、図9に示す電子ディスプレイの代わりに単一の大型カウンタ・ホイールを有する機械式容積指示器を含む容積調整可能手動ピペットの上部部分の部分側断面図である。
【図16】図15に示す容積調整可能手動ピペットと類似した、本発明によるクイックセット容積アジャストメント機構として改変型遊星歯車箱実施例を含む容積調整可能手動ピペットであって、一連のカウンタ・ホイールを有する機械式容積指示器を含む容積調整可能手動ピペットの上部部分の部分側断面図である。
【図17】リング歯車および図16に示す遊星歯車実施例の太陽歯車とリング歯車の間の遊星歯車の部分を示すために、図16に示すクイックセット機構を線D−Dの方向から見た部分の拡大断面上面図である。
【特許請求の範囲】
【請求項1】
容積調整可能ピペット(10、10’)であって、
ハウジング(12)と、
前記ハウジングから延びる先端部内に流体を吸引する間および前記先端部から流体を分配する間に、前記ハウジング内をストップ(32s、32s’)まで、およびストップ(32s、32s’)から軸線方向に移動するために取り付けられたプランジャ(20)と、
前記ハウジング内を軸線方向に移動可能な容積設定部材(32、32’)であって、前記プランジャのための前記ストップ(32s、32s’)および前記ピペットのための容積設定を画定する容積設定部材(32、32’)と、
容積調整部材(33、33’)の回転に応答して前記容積設定部材(32、32’)を軸線方向に移動させるための容積調整手段(22、22’)と
を有する容積調整可能ピペット(10、10’)において、
精密容積設定手段(35、35’)および概略容積設定手段(34、34’)が、前記容積調整部材(33、33’)の比較的大きい回転および比較的小さい回転にそれぞれ応答して、前記容積設定部材(32、32’)を比較的短い軸線方向の距離および比較的長い軸線方向の距離だけそれぞれ連続的に移動させることを特徴とする容積調整可能ピペット(10、10’)。
【請求項2】
連続的動作のために前記概略容積設定手段(34)と前記精密容積設定手段(35)とを結合する手段(51t、52、53t、54t、54)をさらに有する請求項1に記載のピペット(10)。
【請求項3】
前記概略容積設定手段(34)または前記精密容積設定手段(35)のいずれか一方が、前記概略容積設定手段(34)または前記精密容積設定手段(35)の前記いずれか一方によって前記容積設定部材(32)を移動させるための力の閾値によって特徴付けられ、また前記力の閾値は、前記容積調整部材(32)による前記概略容積設定手段または前記精密容積設定手段の他方の所定の移動によって超過される請求項2に記載のピペット(10)。
【請求項4】
前記ハウジング(12)内の前記プランジャ(20)の位置を監視するための手段(16、75)をさらに含む請求項1に記載のピペット(10)。
【請求項5】
前記ハウジング(12)内の前記容積設定部材(32)の位置を監視するための手段(16、75、42)をさらに含む請求項1に記載のピペット(10)。
【請求項6】
前記容積調整部材(33、33’)の回転に応答して前記ハウジング(12)内を軸線方向に移動するように前記容積設定部材(32、32’)を支持する手段をさらに有し、軸線方向に移動するように前記容積設定部材(32、32’)を支持する前記手段が、前記容積調整部材(33、33’)の連続的な回転に応答して、前記ピペットのための容積設定の微調整および粗調整を提供する請求項1に記載のピペット(10、10’)。
【請求項7】
前記概略容積設定手段(34)が、前記容積設定部材(32)によって支持された軸線方向に延びるねじ(52)の上の、比較的粗目のねじ山(53t)を有し、
前記精密容積設定手段(35)が、前記容積調整部材(33)を有するスリーブ(44)の上に、前記ねじ(52)の比較的細目のねじ山(51t)と係合する比較的細目のねじ山(49t)を有している請求項6に記載のピペット(10)。
【請求項8】
前記容積調整部材(33)または前記ねじ(52)のいずれか一方に設けた微調整リミッター(60)と、
前記容積調整部材(33)または前記ねじ(52)の他方に設けた、前記リミッターと係合するためのショルダ(61)であって、それによって前記ショルダに対する前記リミッターと連れ立った前記容積調整部材(33)の回転が、前記容積調整部材を連れ立った前記ねじ(52)の回転を提供するショルダ(61)と
をさらに有する請求項7に記載のピペット(10)。
【請求項9】
前記容積調整部材(33’)と前記容積設定部材(32’)の間の歯車機構(22’)であって、前記容積調整部材の回転に応答して、前記精密容積設定手段(35’)を介した前記容積設定部材の比較的短い軸線方向の移動と、前記概略容積設定手段(34’)を介した前記容積設定部材の比較的長い軸線方向の移動とを選択的にもたらす歯車機構(22’)をさらに有する請求項6に記載のピペット(10’)。
【請求項10】
前記容積設定部材(32’)が、比較的粗目のねじ山(53t)を有し且つ軸線方向に延びるねじ(52’)を有し、
前記歯車機構(22’)が遊星歯車機構を有し、
該遊星歯車機構が、
前記容積設定部材(32’)を有する前記ねじ(52’)上の遊星歯車キャリア(82)と、
外部リング歯車(84)と個別にかみ合っている前記キャリアの上の円周方向に離間した複数の遊星歯車(83)と、
前記複数の遊星歯車(83)とかみ合っている前記容積調整部材(33’)によって支持された内部太陽歯車(81)であって、前記ピペットの容積設定を調整するための前記容積調整部材(33’)の回転に応答して、前記太陽歯車、前記遊星歯車および前記容積設定部材(32’)の回転をもたらす内部太陽歯車(81)と
を含む請求項9に記載のピペット(10’)。
【請求項11】
前記概略容積設定手段(34’)または前記精密容積設定手段(35’)のいずれか一方が、前記概略容積設定手段(34’)または前記精密容積設定手段(35’)の前記いずれか一方によって前記容積設定部材(32’)を移動させるための力の閾値によって特徴付けられ、また前記力の閾値は、前記容積調整部材(33’)による前記概略容積設定手段または前記精密容積設定手段のうちの他方の所定の移動によって超過される請求項10に記載のピペット(10’)。
【請求項12】
前記容積調整部材(33’)または歯車ハウジング(85)のいずれか一方に設けた微調整リミッター(60’)と、
前記容積調整部材(33’)または前記歯車ハウジング(85)のうちの他方に設けた、前記リミッターと係合するためのショルダ(61)であって、それによって前記ショルダに対する前記リミッターと連れ立った前記容積調整部材(33’)の回転が、前記遊星歯車(83)および前記キャリア(82)と連れ立った前記リング歯車(84)の回転をもたらして前記容積設定部材(32’)を回転させ、それによって前記ピペットのための前記容積設定を調整するショルダ(61)と
をさらに有する請求項11に記載のピペット(10’)。
【請求項13】
前記容積設定部材(32’)と共に回転して前記ピペットの容積設定を表示するためのカウンタ・ホイール(90)をさらに有する請求項12に記載のピペット(10’)。
【請求項14】
前記概略容積設定手段(34’)が、前記容積設定部材(32’)を有し且つ軸線方向に延びるねじ(52”)の上にねじ山(53t)を有し、
前記歯車機構(22’)が遊星歯車機構を有し、
該遊星歯車機構が、
前記容積設定部材(32”)を有する前記容積調整部材の上の遊星歯車キャリア(82)と、
前記キャリアに結合された外部リング歯車(84)と個別にかみ合っている前記キャリア(82)の上の円周方向に離間した複数の遊星歯車(83)と、
前記複数の遊星歯車(83)とかみ合っている前記容積設定部材(32’)によって支持された内部太陽歯車(81)であって、前記ピペットの前記容積設定を調整するための前記容積調整部材(33’)の回転に応答して、前記太陽歯車、前記遊星歯車および前記容積設定部材も回転をもたらす内部太陽歯車(81)と
を含む請求項9に記載のピペット(10’)。
【請求項15】
前記概略容積設定手段(34’)または精密容積設定手段(35’)のいずれか一方が、前記概略容積設定手段(34’)または精密容積設定手段(35’)の前記いずれか一方によって前記容積設定部材(32’)を移動させるための力の閾値によって特徴付けられ、また前記力の閾値は、前記容積調整部材(33’)による前記概略容積設定手段または前記精密容積設定手段のうちの他方の所定の移動によって超過される請求項14に記載のピペット(10’)。
【請求項16】
ハウジング(85)またはリング歯車(84)のいずれか一方に設けた微調整リミッター(60’)と、
前記ハウジング(85)またはリング歯車(84)のうちの他方に設けた、前記リミッターと係合するためのショルダ(61)であって、それによって前記ショルダに対する前記リミッターと連れ立った前記容積調整部材(33’)の回転が、前記遊星歯車(83)およびキャリア(82)と連れ立った前記リング歯車(84)の回転をもらたして前記容積設定部材(32’)が回転し、それによって前記ピペットの前期容積設定を調整する請求項15に記載のピペット(10’)。
【請求項17】
前記容積設定部材(32’)と共に回転して前記ピペットの容積設定を表示するためのカウンタ・ホイール手段(90)をさらに有する請求項16に記載のピペット(10’)。
【請求項18】
前記容積設定部材と連れ立った、および前記容積設定部材とは独立した前記容積調整部材(33)の連続的な回転に応答して、前記ハウジング(12)内を軸線方向に移動するように前記容積設定部材(32)を支持する手段をさらに有し、それにより前記ピペットの容積設定がそれぞれ微調整および粗調整される請求項3に記載のピペット(10)。
【請求項19】
前記概略容積設定手段(34)が、前記容積設定部材(32)の上の軸線方向に延びるねじ(52)の上に比較的粗目のねじ山(53t)を含み、
前記精密容積設定手段(35)が、前記容積調整部材(33)を有するスリーブ(44)の上に、前記容積設定部材(32)の上の比較的細目のねじ山(51t)と係合する比較的細目のねじ山(49t)を有している請求項18に記載のピペット(10)。
【請求項20】
前記容積調整部材(33)または前記容積設定部材(32)のいずれか一方に設けた微調整リミッター(60)と、
前記容積調整部材(33)または容積設定部材(32)のうちの他方に設けた、前記リミッター(60)と係合するためのショルダ(61)であって、それによって前記ショルダに対する前記リミッターと連れ立った前記容積調整部材(33)の回転が、前記容積調整部材(33)と連れ立った前記容積設定部材(32)の回転をもたらす請求項19に記載のピペット(10)。
【請求項1】
容積調整可能ピペット(10、10’)であって、
ハウジング(12)と、
前記ハウジングから延びる先端部内に流体を吸引する間および前記先端部から流体を分配する間に、前記ハウジング内をストップ(32s、32s’)まで、およびストップ(32s、32s’)から軸線方向に移動するために取り付けられたプランジャ(20)と、
前記ハウジング内を軸線方向に移動可能な容積設定部材(32、32’)であって、前記プランジャのための前記ストップ(32s、32s’)および前記ピペットのための容積設定を画定する容積設定部材(32、32’)と、
容積調整部材(33、33’)の回転に応答して前記容積設定部材(32、32’)を軸線方向に移動させるための容積調整手段(22、22’)と
を有する容積調整可能ピペット(10、10’)において、
精密容積設定手段(35、35’)および概略容積設定手段(34、34’)が、前記容積調整部材(33、33’)の比較的大きい回転および比較的小さい回転にそれぞれ応答して、前記容積設定部材(32、32’)を比較的短い軸線方向の距離および比較的長い軸線方向の距離だけそれぞれ連続的に移動させることを特徴とする容積調整可能ピペット(10、10’)。
【請求項2】
連続的動作のために前記概略容積設定手段(34)と前記精密容積設定手段(35)とを結合する手段(51t、52、53t、54t、54)をさらに有する請求項1に記載のピペット(10)。
【請求項3】
前記概略容積設定手段(34)または前記精密容積設定手段(35)のいずれか一方が、前記概略容積設定手段(34)または前記精密容積設定手段(35)の前記いずれか一方によって前記容積設定部材(32)を移動させるための力の閾値によって特徴付けられ、また前記力の閾値は、前記容積調整部材(32)による前記概略容積設定手段または前記精密容積設定手段の他方の所定の移動によって超過される請求項2に記載のピペット(10)。
【請求項4】
前記ハウジング(12)内の前記プランジャ(20)の位置を監視するための手段(16、75)をさらに含む請求項1に記載のピペット(10)。
【請求項5】
前記ハウジング(12)内の前記容積設定部材(32)の位置を監視するための手段(16、75、42)をさらに含む請求項1に記載のピペット(10)。
【請求項6】
前記容積調整部材(33、33’)の回転に応答して前記ハウジング(12)内を軸線方向に移動するように前記容積設定部材(32、32’)を支持する手段をさらに有し、軸線方向に移動するように前記容積設定部材(32、32’)を支持する前記手段が、前記容積調整部材(33、33’)の連続的な回転に応答して、前記ピペットのための容積設定の微調整および粗調整を提供する請求項1に記載のピペット(10、10’)。
【請求項7】
前記概略容積設定手段(34)が、前記容積設定部材(32)によって支持された軸線方向に延びるねじ(52)の上の、比較的粗目のねじ山(53t)を有し、
前記精密容積設定手段(35)が、前記容積調整部材(33)を有するスリーブ(44)の上に、前記ねじ(52)の比較的細目のねじ山(51t)と係合する比較的細目のねじ山(49t)を有している請求項6に記載のピペット(10)。
【請求項8】
前記容積調整部材(33)または前記ねじ(52)のいずれか一方に設けた微調整リミッター(60)と、
前記容積調整部材(33)または前記ねじ(52)の他方に設けた、前記リミッターと係合するためのショルダ(61)であって、それによって前記ショルダに対する前記リミッターと連れ立った前記容積調整部材(33)の回転が、前記容積調整部材を連れ立った前記ねじ(52)の回転を提供するショルダ(61)と
をさらに有する請求項7に記載のピペット(10)。
【請求項9】
前記容積調整部材(33’)と前記容積設定部材(32’)の間の歯車機構(22’)であって、前記容積調整部材の回転に応答して、前記精密容積設定手段(35’)を介した前記容積設定部材の比較的短い軸線方向の移動と、前記概略容積設定手段(34’)を介した前記容積設定部材の比較的長い軸線方向の移動とを選択的にもたらす歯車機構(22’)をさらに有する請求項6に記載のピペット(10’)。
【請求項10】
前記容積設定部材(32’)が、比較的粗目のねじ山(53t)を有し且つ軸線方向に延びるねじ(52’)を有し、
前記歯車機構(22’)が遊星歯車機構を有し、
該遊星歯車機構が、
前記容積設定部材(32’)を有する前記ねじ(52’)上の遊星歯車キャリア(82)と、
外部リング歯車(84)と個別にかみ合っている前記キャリアの上の円周方向に離間した複数の遊星歯車(83)と、
前記複数の遊星歯車(83)とかみ合っている前記容積調整部材(33’)によって支持された内部太陽歯車(81)であって、前記ピペットの容積設定を調整するための前記容積調整部材(33’)の回転に応答して、前記太陽歯車、前記遊星歯車および前記容積設定部材(32’)の回転をもたらす内部太陽歯車(81)と
を含む請求項9に記載のピペット(10’)。
【請求項11】
前記概略容積設定手段(34’)または前記精密容積設定手段(35’)のいずれか一方が、前記概略容積設定手段(34’)または前記精密容積設定手段(35’)の前記いずれか一方によって前記容積設定部材(32’)を移動させるための力の閾値によって特徴付けられ、また前記力の閾値は、前記容積調整部材(33’)による前記概略容積設定手段または前記精密容積設定手段のうちの他方の所定の移動によって超過される請求項10に記載のピペット(10’)。
【請求項12】
前記容積調整部材(33’)または歯車ハウジング(85)のいずれか一方に設けた微調整リミッター(60’)と、
前記容積調整部材(33’)または前記歯車ハウジング(85)のうちの他方に設けた、前記リミッターと係合するためのショルダ(61)であって、それによって前記ショルダに対する前記リミッターと連れ立った前記容積調整部材(33’)の回転が、前記遊星歯車(83)および前記キャリア(82)と連れ立った前記リング歯車(84)の回転をもたらして前記容積設定部材(32’)を回転させ、それによって前記ピペットのための前記容積設定を調整するショルダ(61)と
をさらに有する請求項11に記載のピペット(10’)。
【請求項13】
前記容積設定部材(32’)と共に回転して前記ピペットの容積設定を表示するためのカウンタ・ホイール(90)をさらに有する請求項12に記載のピペット(10’)。
【請求項14】
前記概略容積設定手段(34’)が、前記容積設定部材(32’)を有し且つ軸線方向に延びるねじ(52”)の上にねじ山(53t)を有し、
前記歯車機構(22’)が遊星歯車機構を有し、
該遊星歯車機構が、
前記容積設定部材(32”)を有する前記容積調整部材の上の遊星歯車キャリア(82)と、
前記キャリアに結合された外部リング歯車(84)と個別にかみ合っている前記キャリア(82)の上の円周方向に離間した複数の遊星歯車(83)と、
前記複数の遊星歯車(83)とかみ合っている前記容積設定部材(32’)によって支持された内部太陽歯車(81)であって、前記ピペットの前記容積設定を調整するための前記容積調整部材(33’)の回転に応答して、前記太陽歯車、前記遊星歯車および前記容積設定部材も回転をもたらす内部太陽歯車(81)と
を含む請求項9に記載のピペット(10’)。
【請求項15】
前記概略容積設定手段(34’)または精密容積設定手段(35’)のいずれか一方が、前記概略容積設定手段(34’)または精密容積設定手段(35’)の前記いずれか一方によって前記容積設定部材(32’)を移動させるための力の閾値によって特徴付けられ、また前記力の閾値は、前記容積調整部材(33’)による前記概略容積設定手段または前記精密容積設定手段のうちの他方の所定の移動によって超過される請求項14に記載のピペット(10’)。
【請求項16】
ハウジング(85)またはリング歯車(84)のいずれか一方に設けた微調整リミッター(60’)と、
前記ハウジング(85)またはリング歯車(84)のうちの他方に設けた、前記リミッターと係合するためのショルダ(61)であって、それによって前記ショルダに対する前記リミッターと連れ立った前記容積調整部材(33’)の回転が、前記遊星歯車(83)およびキャリア(82)と連れ立った前記リング歯車(84)の回転をもらたして前記容積設定部材(32’)が回転し、それによって前記ピペットの前期容積設定を調整する請求項15に記載のピペット(10’)。
【請求項17】
前記容積設定部材(32’)と共に回転して前記ピペットの容積設定を表示するためのカウンタ・ホイール手段(90)をさらに有する請求項16に記載のピペット(10’)。
【請求項18】
前記容積設定部材と連れ立った、および前記容積設定部材とは独立した前記容積調整部材(33)の連続的な回転に応答して、前記ハウジング(12)内を軸線方向に移動するように前記容積設定部材(32)を支持する手段をさらに有し、それにより前記ピペットの容積設定がそれぞれ微調整および粗調整される請求項3に記載のピペット(10)。
【請求項19】
前記概略容積設定手段(34)が、前記容積設定部材(32)の上の軸線方向に延びるねじ(52)の上に比較的粗目のねじ山(53t)を含み、
前記精密容積設定手段(35)が、前記容積調整部材(33)を有するスリーブ(44)の上に、前記容積設定部材(32)の上の比較的細目のねじ山(51t)と係合する比較的細目のねじ山(49t)を有している請求項18に記載のピペット(10)。
【請求項20】
前記容積調整部材(33)または前記容積設定部材(32)のいずれか一方に設けた微調整リミッター(60)と、
前記容積調整部材(33)または容積設定部材(32)のうちの他方に設けた、前記リミッター(60)と係合するためのショルダ(61)であって、それによって前記ショルダに対する前記リミッターと連れ立った前記容積調整部材(33)の回転が、前記容積調整部材(33)と連れ立った前記容積設定部材(32)の回転をもたらす請求項19に記載のピペット(10)。
【図1】

【図2】
【図3】
【図4】
【図5A】
【図5B】
【図6A】
【図6B】
【図6C】
【図6D】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13A】
【図13B】
【図13C】
【図13D】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5A】
【図5B】
【図6A】
【図6B】
【図6C】
【図6D】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13A】
【図13B】
【図13C】
【図13D】
【図14】
【図15】
【図16】
【図17】
【公表番号】特表2007−516836(P2007−516836A)
【公表日】平成19年6月28日(2007.6.28)
【国際特許分類】
【出願番号】特願2006−547551(P2006−547551)
【出願日】平成16年12月28日(2004.12.28)
【国際出願番号】PCT/US2004/043879
【国際公開番号】WO2005/065360
【国際公開日】平成17年7月21日(2005.7.21)
【出願人】(502280223)ライニン インストルメント、エルエルシー (2)
【Fターム(参考)】
【公表日】平成19年6月28日(2007.6.28)
【国際特許分類】
【出願日】平成16年12月28日(2004.12.28)
【国際出願番号】PCT/US2004/043879
【国際公開番号】WO2005/065360
【国際公開日】平成17年7月21日(2005.7.21)
【出願人】(502280223)ライニン インストルメント、エルエルシー (2)
【Fターム(参考)】
[ Back to top ]