
クラッチアクチュエータおよびクラッチアクチュエータの制御方法
本発明は、クラッチアクチュエータ(1)およびクラッチアクチュエータの制御方法に関する。該クラッチアクチュエータはマルチクラッチを操作し、このために、摩擦クラッチの数に相応したアクチュエータモジュール(2,3)を使用することができる。該アクチュエータモジュール(2,3)は、別個の制御装置(4)ならびに該制御装置によって制御される電動機(6)を備えており、該電動機(6)は係脱機構を用いて前記摩擦クラッチに作用する。アクチュエータモジュール(2,3)の機能障害時に、摩擦クラッチ、とりわけノーマルオープン型の摩擦クラッチに後置された部分パワートレインのブロッキングに対処するために、これらのアクチュエータモジュールはデータ線路(11)によって互いに接続されており、該データ線路は前記アクチュエータモジュール(2,3)の監視および対抗手段を可能にする。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、マルチクラッチトランスミッションにおけるマルチクラッチのためのクラッチアクチュエータおよび該アクチュエータの制御方法に関し、前記マルチクラッチは、該マルチクラッチに相応した数の部分パワートレインを備えている。
【0002】
従来技術から、2つの部分パワートレインを使用できるいわゆるダブルクラッチトランスミッションまたはパラレルシフトトランスミッションが公知であり、前記部分パワートレインはそれぞれ1つの摩擦クラッチによって内燃機関に接続可能である。この種のダブルクラッチトランスミッションのギアチェンジは、2つの部分パワートレインにてギアが入っている場合に、内燃機関のトルクがスリップ運転時の摩擦クラッチのいわゆるオーバーラップにおいて一方の部分パワートレインから他方の部分パワートレインに伝送されることによって行われるが、これは、元々開かれていた摩擦クラッチが閉じられることによって行われる。したがってギアチェンジ時以外の動作中は、トランスミッションおよび後続の駆動車輪のブロッキングを阻止するために2つの摩擦クラッチのうちの1つが常に開かれていなければならない。
【0003】
したがってクラッチアクチュエータに予期せぬ機能障害が生じた場合には、ダブルクラッチトランスミッションのブロッキングが生じないよう配慮しなければならない。このために例えば特別に構成された摩擦クラッチが使用され、該摩擦クラッチは緊張緩和状態では開かれており、非自己保持式のクラッチアクチュエータによって閉じられる。機能障害時には2つのアクチュエータは通電から切り離され、2つの摩擦クラッチは開く。機能障害のせいで所属の摩擦クラッチが閉じられたまたはスリップ状態にてアクチュエータモジュールが挟まって動かなくなってしまった場合には、このトランスミッションの停止は、機能可能な他の摩擦クラッチを同時に開放することによって回避される。この場合にはアクチュエータモジュールを備えるクラッチアクチュエータを、電流の無い状態にて自ら開状態になるよう非自己保持式に設計しなければならない。したがって相応に大きいアクチュエータ力を用意する必要があり、この際とりわけ高い出力と相応の構造スペースを備える電動機を使用しなければならなくなる。
【0004】
本発明の課題は、摩擦クラッチをその動作方式に関係なく操作できるクラッチアクチュエータならびにクラッチアクチュエータの制御方法を提供することであり、この際、アクチュエータモジュールの機能障害時にトランスミッションのブロッキングを阻止したい。さらにはアクチュエータ力を低減したい。
【0005】
この課題は、少なくとも2つの摩擦クラッチを備えるマルチクラッチを操作するためのクラッチアクチュエータであって、該クラッチアクチュエータは少なくとも2つのアクチュエータモジュールを有し、該少なくとも2つのアクチュエータモジュールは、それぞれ、1つの電動機と、該電動機によって駆動される1つの係脱機構を備えており、該係脱機構は、それぞれ、前記係脱機構の操作するための1つの摩擦クラッチに作用し、ならびに、前記電動機の制御および電流供給のための1つの制御ユニットに作用する形式のクラッチアクチュエータにおいて、前記少なくとも2つのアクチュエータモジュールは互いにデータ線路によって接続されていることを特徴とするクラッチアクチュエータによって解決される。この際有利には、マルチクラッチは2つの摩擦クラッチを備えるダブルクラッチであり、ここで各クラッチアクチュエータのアクチュエータモジュールはそれぞれ2つの摩擦クラッチの1つを操作する。各アクチュエータモジュールは制御ユニットを含み、該制御ユニットにおいて、電動機を制御するための信号、例えばブラシレス電子整流電動機の場合には電動機を整流するための信号が、ホールセンサのようなロータの回転運動を検出するセンサから検出されて、電動機に転送される。さらには制御ユニットに、データが例えば特性マップまたは数学的関数の形態で格納されている。該データは、摩擦クラッチによって伝達すべきトルクに対するクラッチストロークの割り当てを格納しており、このデータは絶えずアップデートされ、摩擦クラッチおよび係脱機構の物理的な変更に適合される。これに加えて制御ユニットには、電動機を作動するためのパワーエレクトロニクスが設けられており、これによってアクチュエータモジュールは自立的に、クラッチ工程中に必要な調整量を生成し、電動機に出力し、調整量の実施を監視することができるようになる。1つまたは全てのアクチュエータモジュールは機能ソフトウェアを含むことができ、該機能ソフトウェアは、監視機能や別の搭載電源網等との通信といった上位の機能を含むことができる。
【0006】
内部のデータ線路を介してアクチュエータモジュールだけが互いに通信し合う。データ線路は、シリアルな伝送プロトコルを使用することができ、CANバスのような伝送プロトコルにはよく知られたバスシステムに依拠することができる。この際、データ線路を搭載電源網と接続してデータを交換させるようにはしない。有利には、データ線路を介して個々のアクチュエータモジュールの動作状態が交換される。各アクチュエータモジュールにそれぞれ例えば相応の監視モジュールを設けることができ、該監視モジュールは、電動機に出力される信号の妥当性をチェックする。この監視モジュールからアクチュエータモジュールの機能障害が判明した場合、例えば電動機の通電がエラーであるかまたは停止している場合、電動機が故障している場合、したがって計算された制御ストロークがセットされない場合、または、制御ユニットそのものが故障している場合等には、相応の情報が他のアクチュエータモジュールに送信され、−トランスミッションが挟まって動かなくなる危険を回避するために−残りの摩擦クラッチ、ダブルクラッチの場合は第2の摩擦クラッチが開かれる。したがって機能可能なアクチュエータモジュールの制御は、機能障害を有するアクチュエータモジュールの動作状態に依存して行われる。ここでアクチュエータモジュールの機能障害が存続する場合には、エラー信号を、データ線路を介して少なくとも1つの別のアクチュエータモジュールに伝送し、少なくとも1つの第2アクチュエータモジュールを非常運転にて動作することができる。非常運転においては、まだ機能することが可能な1つまたは複数のアクチュエータモジュールを排他的な機能させ、機能障害を有するアクチュエータモジュールを停止させることができる。この際、機能障害を有するアクチュエータモジュールの電動機の動きを即座に停止することができ、まだ機能可能なアクチュエータモジュールは、自身に割り当てられている摩擦クラッチを開くことができる。これによってトランスミッションが挟まって動かなくなることが回避されている。
【0007】
アクチュエータモジュールは有利にはそれぞれ自身のために搭載電源網の電圧供給部に接続されており、車両の運転開始時に相応のトランスミッションによって作動され、車両の停止後に再び遮断される。以下の場合に有利であることが判明している、すなわち、電流供給が給電線路の形態でアクチュエータモジュールに持続的に印加され、例えばイグニッションスイッチ、イグニッションキー、または別の運転開始を示すスイッチと接続された制御線路が別個のコネクタによってアクチュエータモジュールに接続されると有利であり、前記制御線路は、車両の動作中にケーブルが断傷した場合または電流供給部への給電線路のコネクタが脱落した場合に、該制御線路を介して、所要電流の小さい制御ユニットに電流が供給され得る程度の電気エネルギを供給する。アクチュエータモジュールへの冗長的な給電は、別の方法によっても、例えばコネクタおよび線路を二重に案内することによっても行うことができる。
【0008】
特に有利には、本発明の提案するアクチュエータモジュールは、いわゆるノーマルクローズド型の摩擦クラッチ、すなわち緊張緩和状態においては閉じられており、アクチュエータモジュールによって押し開けられるような摩擦クラッチのために使用することができる。このためにアクチュエータモジュールを、以下のように、すなわちこの種の摩擦クラッチが開状態において非常に小さな操作力しか要求しないように、自己保持式に構成することができる。アクチュエータモジュールが互いに機能障害を監視し合うので、機能障害時に2つの摩擦クラッチの自動開放は必要無くなる。さらに機能障害は残りのアクチュエータモジュールによって精確に認識され、所属の摩擦クラッチが開かれる。したがって、場合によってはもはや機能できずにトルクを伝達している摩擦クラッチが、トルクを伝達する唯一の摩擦クラッチとなるので、トランスミッションが動かなくなることはない。非自己保持式のノーマルオープン型の摩擦クラッチよりも、走行動作中に開いている摩擦クラッチの保持力はより小さいので、アクチュエータ力を低減することができ、該アクチュエータに属する電動機をより弱く設計することが可能となる。これによりコストを節約でき、クラッチアクチュエータの所要スペースを縮小することが可能となる。
【0009】
別の実施例においては、2つのアクチュエータモジュールを監視する1つの制御装置を設けることができる。この際、これらの2つのアクチュエータモジュールにもいわゆるスマートアクチュエータモジュールとして固有のプロセッサユニットが装備されている。この際、摩擦クラッチの閉ループおよび開ループ制御のための全てのデータ処理を上位制御装置にて実施したり、それぞれ1つのアクチュエータモジュールに対するデータ処理を各アクチュエータモジュールにて実施するのと同じように、摩擦クラッチの閉ループおよび開ループ制御の少なくとも一部を前記上位制御装置にて実施し、閉ループおよび閉ループ制御のその他の部分を前記アクチュエータユニットにて実施することが可能である。有利にはこの際、1つのアクチュエータモジュールに対する監視機能は他のアクチュエータモジュールにて実現されている。このようにして、例えばプロセッサの故障によって生じうる機能障害の検出とは独立して、これらのアクチュエータモジュールは互いに監視ないしチェックされることができる。同じようにして、2つのアクチュエータモジュールの機能監視の結果は上位制御装置によって監視される。この際特に有利には機能障害を検出するために、2つの監視ユニット、すなわち上位制御装置における監視ユニットと各アクチュエータモジュールにおける監視ユニットは、互いに考量し合っている。このようにして例えば、アクチュエータユニットにおいても上位制御装置においても該当するアクチュエータモジュールに対する機能障害が検出される場合のみ、機能障害であると評価することができる。本発明の課題はさらに、少なくとも2つの摩擦クラッチを備えるマルチクラッチを操作するためのクラッチアクチュエータの制御方法であって、該クラッチアクチュエータは少なくとも2つのアクチュエータモジュールを有し、該少なくとも2つのアクチュエータモジュールは、それぞれ、1つの電動機と、該電動機によって駆動される1つの係脱機構を備えており、該係脱機構は、それぞれ、該係脱機構を操作するための1つの摩擦クラッチに作用し、ならびに、前記電動機の制御および電流供給のための1つの制御ユニットに作用する形式のクラッチアクチュエータの制御方法において、前記少なくとも2つのアクチュエータモジュールは互いにデータ線路によって接続されており、アクチュエータモジュールの機能可能性の監視は少なくとも1つの第2のアクチュエータモジュールによって行われることを特徴とする方法によって解決される。本発明の1つの実施例によれば、データ線路を介して、第1のアクチュエータモジュールの状態情報が、少なくとも1つの別のアクチュエータモジュールに伝送される。ここでは、該少なくとも1つの別のアクチュエータが、前記第1のアクチュエータモジュールの障害に関する状態情報をチェックして、障害検出時には非常運転に切り替えることができる。非常運転時には、前記第1のアクチュエータモジュールの駆動を停止することができ、前記少なくとも1つの別のアクチュエータモジュールは自身に割り当てられた摩擦クラッチを開放することができる。
【0010】
さらに有利には、非常運転時に、トランスミッションを制御するために設けられた制御ユニットに信号が出力され、該制御ユニットが、機能障害を有するアクチュエータモジュールを備えた摩擦クラッチに割り当てられている部分パワーユニットにおいて噛み合っているギアを切り離す。
【0011】
以下の表1には、例えばクラッチアクチュエータに対する機能障害の例、機能障害の直接的結果、および、提案されるクラッチアクチュエータの反応が示されている。表1は、ダブルクラッチの摩擦クラッチK1のアクチュエータモジュール(AM1)に対する種々異なる機能障害を示す。これらの機能障害を第2の摩擦クラッチK2のアクチュエータモジュール2に伝送することもできる。この際、第1の監視層においてはコネクタおよび線路の機能が、第2の監視層においては例えば調整量の妥当性が、第3の監視層においては例えば制御ユニットにて使用されるマイクロプロセッサの妥当性がチェックされる。
【0012】
【表1】
【0013】
互いに他方のアクチュエータモジュールに対する監視機能を有する2つのアクチュエータモジュールと、上位制御装置とを備えるクラッチアクチュエータを使用する場合であって、前記2つのアクチュエータモジュールが例えばCANバスによって互いに接続されており、かつ上位制御装置と接続されている場合、以下の表2による実施例に従った相応の手段ないし結果を有する機能を、これら2つのアクチュエータモジュールに割り当てられた2つの摩擦クラッチのために設けることができる。
【0014】
以下、本発明を図1〜3に基づいてより詳細に説明する。
【図面の簡単な説明】
【0015】
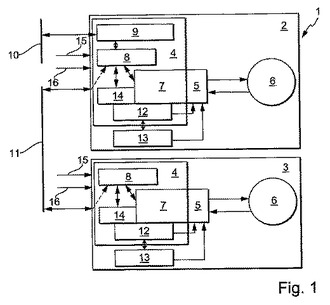
【図1】図1は、2つのアクチュエータモジュールを備えるダブルクラッチのためのクラッチアクチュエータの構成実施例を示す概略図である。
【図2】図2は、アクチュエータモジュールの機能を示すブロック図である。
【図3】図3は、上位制御装置を備えるクラッチアクチュエータの機能を示す別のブロック図である。
【0016】
図1は、2つのアクチュエータモジュール2,3を備えるクラッチアクチュエータ1を概略的に示しており、これらのアクチュエータモジュール2,3はそれぞれ、1つの制御ユニット4と、電動機6の通電用パワーエレクトロニクスを備える出力段とを備える。電動機6はホールセンサを備えた電子整流モータであり、このセンサの信号は制御ユニットの整流ユニット7において検出される。電動機の整流は整流ユニット7においても行われる。整流ユニット7は整流信号を出力段5に伝送し、出力段5は電動機6に電気エネルギを供給する。制御ユニット4はさらに位置調節器8を含む。該位置調節器8は、1つまたは2つのアクチュエータモジュール2,3においてまたは外部の制御ユニットにおいて実現可能な機能ソフトウェア9に基づいて、電動機4により係脱機構を用いて操作される該当する摩擦クラッチに対する相応の調整命令を、電気的な調整信号に変換し、そして変更された制御ストロークを監視する。図示した実施例においてはアクチュエータモジュール2だけが機能ソフトウェア9を有しており、CANバス10を介して車両の別の制御ユニットと通信している。機能ソフトウェア9のデータの伝送は、内部のシリアル・データ線路11によって行われる。別の実施例では、アクチュエータモジュール3は、とりわけ他の制御ユニットにおいて実現された機能ソフトウェアによってCANバスへの接続を使用することも可能である。機能ソフトウェアはASICSの形態で、またはソフトウェアとして、個々の制御ユニットに格納することができる。
【0017】
アクチュエータモジュール2,3は互いに機能障害を監視し合う。このためにそれぞれのアクチュエータモジュール2,3において複数の層に対する監視が行われる。これらの層は、図示した実施例ではブロック12,13として示されており、それぞれ自身のために監視ルーティンを実行し、制御ユニット4の機能が正常である場合には出力段5をイネーブルする。ブロック12,13の1つにおいて機能障害が検出されると出力段が遮断され、データ線路11によって目下アップデートされた動作状態がノーマルモードからエラーモードへと変更される。この変更は例えばエラービットがセットされることによって行われる。動作状態の伝送は、エラーメッセージの送付によって質的に行うことも、エラーの種類を伝送することによって量的に行うことも可能である。伝送されたエラーメッセージに応じて他方のアクチュエータモジュールが反応する。例えば電動機が制御されてまたは制御されずに通電され、これによってこのアクチュエータモジュールに割り当てられた摩擦クラッチが開放されることによって反応する。機能障害に対する反応のために、機能障害の伝送後、他方のアクチュエータモジュール2,3において位置調節器8が直接アクセスされるか、または機能可能なアクチュエータモジュールの非常運転に対するルーティン14が開始される。このようにして、例えば機能障害を有する部分パワートレインにてギアが噛み合っている場合にはこのギアを切り離した後に、まだ機能可能な部分パワートレインが、自動的に牽引力の中断およびギア選択の制限を伴って動作することができる。摩擦クラッチの制御は、ルーティン14か、または機能ソフトウェアにて行われるルーティンの1つによって実施することができる。
【0018】
2つのアクチュエータ2,3には、給電線15によって自動車の搭載電源網から電気エネルギが供給される。制御線路16は、アクチュエータ2,3の活動化および非活動化を、例えばイグニッション信号またはスタートスイッチによる自動車の運転開始に基づいて制御する。アクチュエータモジュール2,3のエネルギ供給機能は、有利には他のアクチュエータモジュール3,2によってチェックすることができる。このようにして例えば、ケーブルの断傷後、ヒューズの焼き切れ後、またはプラグの脱落後に給電線路において供給電圧が降下した場合には、ブロック12,13にて機能障害が確認されることによって検出することができる。このために制御ユニット4は以下のように制御線路16と接続される、すなわち、給電線路15の欠損時に、少ないエネルギ需要に対して設計された制御ユニット4の給電が出力段5なしに保証され、機能障害の信号伝送がデータ線路11を介して得られるように接続される。制御線路16が上に挙げた理由によって遮断されている場合には、このことを該当するアクチュエータモジュールにおいて確認することができ、エラーメッセージをCANバスよって中央の制御ユニット4に転送することができる。制御線路16の遮断は、アクチュエータ2,3の機能に対して影響を及ぼさない。制御ユニット4が欠損した場合には、他方のアクチュエータモジュールがこのことを、データ線路11を介した通信エラーによって検出でき、このアクチュエータモジュールが相応のステップを開始することができる。
【0019】
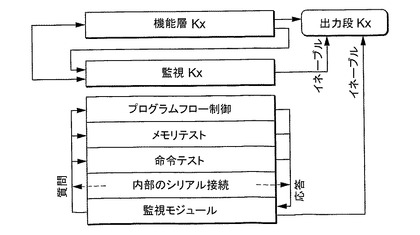
図2は、図1に例示したようなアクチュエータモジュールの機能を示す概略図である。機能層Kxにおいて、機能ソフトウェアから電動機のための設定すべき所期の調整値が出力され、これによって電動機と摩擦クラッチとの間の変速比を考慮して摩擦クラッチの操作距離または係脱距離が出力される。位置調節器において相応する電気的な調整値が検出されて、電動機の通電のために出力段Kxに出力される。これとは平行に第2の監視層において監視Kxが実行され、該監視Kxは、調整値の生の値(raw value)を前記機能層Kxにおける調整値によって確認する。この比較が妥当である場合には出力段Kxのイネーブルが行われる。これとは独立して第3層において、制御ユニットのマイクロプロセッサの機能をチェックする別のチェック手段が、プログラムフロー制御、メモリテスト、または命令テストの形態で実行される。この監視の動作状態はデータ線路を介して他方のアクチュエータモジュールに転送され、監視モジュールによって判断される。監視が妥当である場合には出力段Kxが第2経路によってイネーブルされる。2つの監視、すなわち妥当な調整値が存在し、マイクロプロセッサが実行されたテストに合格したことがチェックされると初めて出力段がイネーブルされ、これとは平行に、動作状態にエラーが無いことが他のアクチュエータモジュールに伝送される。2つの層の1つに不合理が存在する場合には出力段は切り替えられない。つまり、電動機、ひいては摩擦クラッチの目下の位置が凍結される。相応のメッセージが他方のアクチュエータモジュールに伝送され、非常運転が開始される。非常運転は、例えば直ちにこのアクチュエータモジュールに割り当てられた摩擦クラッチを制御するか、可能な限り迅速に開放する。
【0020】
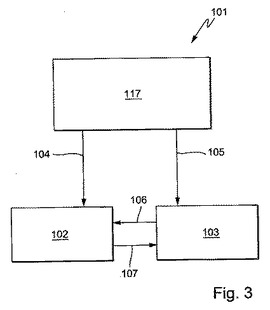
図3は、上位制御装置117ならびに2つのアクチュエータユニット102,103を備えるアクチュエータ101をブロック図として概略的に示しており、該2つのアクチュエータユニット102,103は、自身に割り当てられた摩擦クラッチを操作する電動機と、該電動機を制御するプロセッサユニットとを備えている。ここで各アクチュエータモジュール102,103は、それぞれデータ線路104,105によって上位制御装置117と接続されている。さらに2つのアクチュエータモジュール102,103は、それぞれ1つのデータ線路106,107によって互いに接続されている。データ線路104,105,106,107は、物質的に別個の線路とすることも、CANバスのようなデータ通信の構成部材とすることもできる。矢印として図示されたデータ線路はここでは単にデータの流れ方向を表している。データ線路は物理的に双方向の信号線路として構成可能であることを理解されたい。
【0021】
上位制御装置117においては、この場合第1層または制御階層にて、上位の車両データの要求または運転者の要求から制御量を検出する機能ソフトウェアを実現することができる。このような制御量は、アクチュエータモジュール102,103によって操作される摩擦クラッチを制御、すなわち操作するためのものである。さらにこの層とは独立して第2層を設けることができ、この第2層においては、機能ソフトウェアから出力された制御量の妥当性が確認されて監視される。例えばプロセッサ、または、第1層のプロシージャとは独立して動作するプロセッサのモジュールは、冗長的におよび/または別の計算式に基づいて妥当性量を計算することができ、該妥当性量は前記機能ソフトウェアの制御量と比較される。制御量と妥当性量とが著しくずれる場合には非常運転を開始することができ、この非常運転においては例えば所属の電動機が遮断される。
【0022】
直接または第3層として上位制御装置は、別の監視された量を、データ線路104,105を介してアクチュエータモジュール102,103に伝送することができる。2つのアクチュエータモジュール102,103はこの監視された量の妥当性を改めて監視し、例えばこの妥当性チェックの結果に基づいて例えば電動機の遮断を実行することができる。このために交差的にそれぞれ他方のアクチュエータモジュール102,103において監視ルーティンを実行することができ、該監視ルーティンはそれぞれ他方のアクチュエータモジュール103,102に伝送される。この際アクチュエータモジュール102,103の監視のために、上位制御装置117における妥当性チェックの結果と他方のアクチュエータモジュール103,102における妥当性チェックの結果とが互いに比較され、2つの妥当性チェックの結果が同一である場合にのみ該当する電動機がスイッチオフされる。2つの結果の相違は、例えば個々の監視ユニットにおけるプロセッサの故障、またはこれらの間の線路断損に起因する。
【符号の説明】
【0023】
1 クラッチアクチュエータ
2 アクチュエータモジュール
3 アクチュエータモジュール
4 制御ユニット
5 出力段
6 電動機
7 整流ユニット
8 位置調整器
9 機能ソフトウェア
10 CANバス
11 データ線路
12 ブロック
13 ブロック
14 ルーティン
15 給電線路
16 制御線路
101 クラッチアクチュエータ
102 アクチュエータモジュール
103 アクチュエータモジュール
104 データ線路
105 データ線路
106 データ線路
107 データ線路
117 制御装置
【技術分野】
【0001】
本発明は、マルチクラッチトランスミッションにおけるマルチクラッチのためのクラッチアクチュエータおよび該アクチュエータの制御方法に関し、前記マルチクラッチは、該マルチクラッチに相応した数の部分パワートレインを備えている。
【0002】
従来技術から、2つの部分パワートレインを使用できるいわゆるダブルクラッチトランスミッションまたはパラレルシフトトランスミッションが公知であり、前記部分パワートレインはそれぞれ1つの摩擦クラッチによって内燃機関に接続可能である。この種のダブルクラッチトランスミッションのギアチェンジは、2つの部分パワートレインにてギアが入っている場合に、内燃機関のトルクがスリップ運転時の摩擦クラッチのいわゆるオーバーラップにおいて一方の部分パワートレインから他方の部分パワートレインに伝送されることによって行われるが、これは、元々開かれていた摩擦クラッチが閉じられることによって行われる。したがってギアチェンジ時以外の動作中は、トランスミッションおよび後続の駆動車輪のブロッキングを阻止するために2つの摩擦クラッチのうちの1つが常に開かれていなければならない。
【0003】
したがってクラッチアクチュエータに予期せぬ機能障害が生じた場合には、ダブルクラッチトランスミッションのブロッキングが生じないよう配慮しなければならない。このために例えば特別に構成された摩擦クラッチが使用され、該摩擦クラッチは緊張緩和状態では開かれており、非自己保持式のクラッチアクチュエータによって閉じられる。機能障害時には2つのアクチュエータは通電から切り離され、2つの摩擦クラッチは開く。機能障害のせいで所属の摩擦クラッチが閉じられたまたはスリップ状態にてアクチュエータモジュールが挟まって動かなくなってしまった場合には、このトランスミッションの停止は、機能可能な他の摩擦クラッチを同時に開放することによって回避される。この場合にはアクチュエータモジュールを備えるクラッチアクチュエータを、電流の無い状態にて自ら開状態になるよう非自己保持式に設計しなければならない。したがって相応に大きいアクチュエータ力を用意する必要があり、この際とりわけ高い出力と相応の構造スペースを備える電動機を使用しなければならなくなる。
【0004】
本発明の課題は、摩擦クラッチをその動作方式に関係なく操作できるクラッチアクチュエータならびにクラッチアクチュエータの制御方法を提供することであり、この際、アクチュエータモジュールの機能障害時にトランスミッションのブロッキングを阻止したい。さらにはアクチュエータ力を低減したい。
【0005】
この課題は、少なくとも2つの摩擦クラッチを備えるマルチクラッチを操作するためのクラッチアクチュエータであって、該クラッチアクチュエータは少なくとも2つのアクチュエータモジュールを有し、該少なくとも2つのアクチュエータモジュールは、それぞれ、1つの電動機と、該電動機によって駆動される1つの係脱機構を備えており、該係脱機構は、それぞれ、前記係脱機構の操作するための1つの摩擦クラッチに作用し、ならびに、前記電動機の制御および電流供給のための1つの制御ユニットに作用する形式のクラッチアクチュエータにおいて、前記少なくとも2つのアクチュエータモジュールは互いにデータ線路によって接続されていることを特徴とするクラッチアクチュエータによって解決される。この際有利には、マルチクラッチは2つの摩擦クラッチを備えるダブルクラッチであり、ここで各クラッチアクチュエータのアクチュエータモジュールはそれぞれ2つの摩擦クラッチの1つを操作する。各アクチュエータモジュールは制御ユニットを含み、該制御ユニットにおいて、電動機を制御するための信号、例えばブラシレス電子整流電動機の場合には電動機を整流するための信号が、ホールセンサのようなロータの回転運動を検出するセンサから検出されて、電動機に転送される。さらには制御ユニットに、データが例えば特性マップまたは数学的関数の形態で格納されている。該データは、摩擦クラッチによって伝達すべきトルクに対するクラッチストロークの割り当てを格納しており、このデータは絶えずアップデートされ、摩擦クラッチおよび係脱機構の物理的な変更に適合される。これに加えて制御ユニットには、電動機を作動するためのパワーエレクトロニクスが設けられており、これによってアクチュエータモジュールは自立的に、クラッチ工程中に必要な調整量を生成し、電動機に出力し、調整量の実施を監視することができるようになる。1つまたは全てのアクチュエータモジュールは機能ソフトウェアを含むことができ、該機能ソフトウェアは、監視機能や別の搭載電源網等との通信といった上位の機能を含むことができる。
【0006】
内部のデータ線路を介してアクチュエータモジュールだけが互いに通信し合う。データ線路は、シリアルな伝送プロトコルを使用することができ、CANバスのような伝送プロトコルにはよく知られたバスシステムに依拠することができる。この際、データ線路を搭載電源網と接続してデータを交換させるようにはしない。有利には、データ線路を介して個々のアクチュエータモジュールの動作状態が交換される。各アクチュエータモジュールにそれぞれ例えば相応の監視モジュールを設けることができ、該監視モジュールは、電動機に出力される信号の妥当性をチェックする。この監視モジュールからアクチュエータモジュールの機能障害が判明した場合、例えば電動機の通電がエラーであるかまたは停止している場合、電動機が故障している場合、したがって計算された制御ストロークがセットされない場合、または、制御ユニットそのものが故障している場合等には、相応の情報が他のアクチュエータモジュールに送信され、−トランスミッションが挟まって動かなくなる危険を回避するために−残りの摩擦クラッチ、ダブルクラッチの場合は第2の摩擦クラッチが開かれる。したがって機能可能なアクチュエータモジュールの制御は、機能障害を有するアクチュエータモジュールの動作状態に依存して行われる。ここでアクチュエータモジュールの機能障害が存続する場合には、エラー信号を、データ線路を介して少なくとも1つの別のアクチュエータモジュールに伝送し、少なくとも1つの第2アクチュエータモジュールを非常運転にて動作することができる。非常運転においては、まだ機能することが可能な1つまたは複数のアクチュエータモジュールを排他的な機能させ、機能障害を有するアクチュエータモジュールを停止させることができる。この際、機能障害を有するアクチュエータモジュールの電動機の動きを即座に停止することができ、まだ機能可能なアクチュエータモジュールは、自身に割り当てられている摩擦クラッチを開くことができる。これによってトランスミッションが挟まって動かなくなることが回避されている。
【0007】
アクチュエータモジュールは有利にはそれぞれ自身のために搭載電源網の電圧供給部に接続されており、車両の運転開始時に相応のトランスミッションによって作動され、車両の停止後に再び遮断される。以下の場合に有利であることが判明している、すなわち、電流供給が給電線路の形態でアクチュエータモジュールに持続的に印加され、例えばイグニッションスイッチ、イグニッションキー、または別の運転開始を示すスイッチと接続された制御線路が別個のコネクタによってアクチュエータモジュールに接続されると有利であり、前記制御線路は、車両の動作中にケーブルが断傷した場合または電流供給部への給電線路のコネクタが脱落した場合に、該制御線路を介して、所要電流の小さい制御ユニットに電流が供給され得る程度の電気エネルギを供給する。アクチュエータモジュールへの冗長的な給電は、別の方法によっても、例えばコネクタおよび線路を二重に案内することによっても行うことができる。
【0008】
特に有利には、本発明の提案するアクチュエータモジュールは、いわゆるノーマルクローズド型の摩擦クラッチ、すなわち緊張緩和状態においては閉じられており、アクチュエータモジュールによって押し開けられるような摩擦クラッチのために使用することができる。このためにアクチュエータモジュールを、以下のように、すなわちこの種の摩擦クラッチが開状態において非常に小さな操作力しか要求しないように、自己保持式に構成することができる。アクチュエータモジュールが互いに機能障害を監視し合うので、機能障害時に2つの摩擦クラッチの自動開放は必要無くなる。さらに機能障害は残りのアクチュエータモジュールによって精確に認識され、所属の摩擦クラッチが開かれる。したがって、場合によってはもはや機能できずにトルクを伝達している摩擦クラッチが、トルクを伝達する唯一の摩擦クラッチとなるので、トランスミッションが動かなくなることはない。非自己保持式のノーマルオープン型の摩擦クラッチよりも、走行動作中に開いている摩擦クラッチの保持力はより小さいので、アクチュエータ力を低減することができ、該アクチュエータに属する電動機をより弱く設計することが可能となる。これによりコストを節約でき、クラッチアクチュエータの所要スペースを縮小することが可能となる。
【0009】
別の実施例においては、2つのアクチュエータモジュールを監視する1つの制御装置を設けることができる。この際、これらの2つのアクチュエータモジュールにもいわゆるスマートアクチュエータモジュールとして固有のプロセッサユニットが装備されている。この際、摩擦クラッチの閉ループおよび開ループ制御のための全てのデータ処理を上位制御装置にて実施したり、それぞれ1つのアクチュエータモジュールに対するデータ処理を各アクチュエータモジュールにて実施するのと同じように、摩擦クラッチの閉ループおよび開ループ制御の少なくとも一部を前記上位制御装置にて実施し、閉ループおよび閉ループ制御のその他の部分を前記アクチュエータユニットにて実施することが可能である。有利にはこの際、1つのアクチュエータモジュールに対する監視機能は他のアクチュエータモジュールにて実現されている。このようにして、例えばプロセッサの故障によって生じうる機能障害の検出とは独立して、これらのアクチュエータモジュールは互いに監視ないしチェックされることができる。同じようにして、2つのアクチュエータモジュールの機能監視の結果は上位制御装置によって監視される。この際特に有利には機能障害を検出するために、2つの監視ユニット、すなわち上位制御装置における監視ユニットと各アクチュエータモジュールにおける監視ユニットは、互いに考量し合っている。このようにして例えば、アクチュエータユニットにおいても上位制御装置においても該当するアクチュエータモジュールに対する機能障害が検出される場合のみ、機能障害であると評価することができる。本発明の課題はさらに、少なくとも2つの摩擦クラッチを備えるマルチクラッチを操作するためのクラッチアクチュエータの制御方法であって、該クラッチアクチュエータは少なくとも2つのアクチュエータモジュールを有し、該少なくとも2つのアクチュエータモジュールは、それぞれ、1つの電動機と、該電動機によって駆動される1つの係脱機構を備えており、該係脱機構は、それぞれ、該係脱機構を操作するための1つの摩擦クラッチに作用し、ならびに、前記電動機の制御および電流供給のための1つの制御ユニットに作用する形式のクラッチアクチュエータの制御方法において、前記少なくとも2つのアクチュエータモジュールは互いにデータ線路によって接続されており、アクチュエータモジュールの機能可能性の監視は少なくとも1つの第2のアクチュエータモジュールによって行われることを特徴とする方法によって解決される。本発明の1つの実施例によれば、データ線路を介して、第1のアクチュエータモジュールの状態情報が、少なくとも1つの別のアクチュエータモジュールに伝送される。ここでは、該少なくとも1つの別のアクチュエータが、前記第1のアクチュエータモジュールの障害に関する状態情報をチェックして、障害検出時には非常運転に切り替えることができる。非常運転時には、前記第1のアクチュエータモジュールの駆動を停止することができ、前記少なくとも1つの別のアクチュエータモジュールは自身に割り当てられた摩擦クラッチを開放することができる。
【0010】
さらに有利には、非常運転時に、トランスミッションを制御するために設けられた制御ユニットに信号が出力され、該制御ユニットが、機能障害を有するアクチュエータモジュールを備えた摩擦クラッチに割り当てられている部分パワーユニットにおいて噛み合っているギアを切り離す。
【0011】
以下の表1には、例えばクラッチアクチュエータに対する機能障害の例、機能障害の直接的結果、および、提案されるクラッチアクチュエータの反応が示されている。表1は、ダブルクラッチの摩擦クラッチK1のアクチュエータモジュール(AM1)に対する種々異なる機能障害を示す。これらの機能障害を第2の摩擦クラッチK2のアクチュエータモジュール2に伝送することもできる。この際、第1の監視層においてはコネクタおよび線路の機能が、第2の監視層においては例えば調整量の妥当性が、第3の監視層においては例えば制御ユニットにて使用されるマイクロプロセッサの妥当性がチェックされる。
【0012】
【表1】
【0013】
互いに他方のアクチュエータモジュールに対する監視機能を有する2つのアクチュエータモジュールと、上位制御装置とを備えるクラッチアクチュエータを使用する場合であって、前記2つのアクチュエータモジュールが例えばCANバスによって互いに接続されており、かつ上位制御装置と接続されている場合、以下の表2による実施例に従った相応の手段ないし結果を有する機能を、これら2つのアクチュエータモジュールに割り当てられた2つの摩擦クラッチのために設けることができる。
【0014】
以下、本発明を図1〜3に基づいてより詳細に説明する。
【図面の簡単な説明】
【0015】
【図1】図1は、2つのアクチュエータモジュールを備えるダブルクラッチのためのクラッチアクチュエータの構成実施例を示す概略図である。
【図2】図2は、アクチュエータモジュールの機能を示すブロック図である。
【図3】図3は、上位制御装置を備えるクラッチアクチュエータの機能を示す別のブロック図である。
【0016】
図1は、2つのアクチュエータモジュール2,3を備えるクラッチアクチュエータ1を概略的に示しており、これらのアクチュエータモジュール2,3はそれぞれ、1つの制御ユニット4と、電動機6の通電用パワーエレクトロニクスを備える出力段とを備える。電動機6はホールセンサを備えた電子整流モータであり、このセンサの信号は制御ユニットの整流ユニット7において検出される。電動機の整流は整流ユニット7においても行われる。整流ユニット7は整流信号を出力段5に伝送し、出力段5は電動機6に電気エネルギを供給する。制御ユニット4はさらに位置調節器8を含む。該位置調節器8は、1つまたは2つのアクチュエータモジュール2,3においてまたは外部の制御ユニットにおいて実現可能な機能ソフトウェア9に基づいて、電動機4により係脱機構を用いて操作される該当する摩擦クラッチに対する相応の調整命令を、電気的な調整信号に変換し、そして変更された制御ストロークを監視する。図示した実施例においてはアクチュエータモジュール2だけが機能ソフトウェア9を有しており、CANバス10を介して車両の別の制御ユニットと通信している。機能ソフトウェア9のデータの伝送は、内部のシリアル・データ線路11によって行われる。別の実施例では、アクチュエータモジュール3は、とりわけ他の制御ユニットにおいて実現された機能ソフトウェアによってCANバスへの接続を使用することも可能である。機能ソフトウェアはASICSの形態で、またはソフトウェアとして、個々の制御ユニットに格納することができる。
【0017】
アクチュエータモジュール2,3は互いに機能障害を監視し合う。このためにそれぞれのアクチュエータモジュール2,3において複数の層に対する監視が行われる。これらの層は、図示した実施例ではブロック12,13として示されており、それぞれ自身のために監視ルーティンを実行し、制御ユニット4の機能が正常である場合には出力段5をイネーブルする。ブロック12,13の1つにおいて機能障害が検出されると出力段が遮断され、データ線路11によって目下アップデートされた動作状態がノーマルモードからエラーモードへと変更される。この変更は例えばエラービットがセットされることによって行われる。動作状態の伝送は、エラーメッセージの送付によって質的に行うことも、エラーの種類を伝送することによって量的に行うことも可能である。伝送されたエラーメッセージに応じて他方のアクチュエータモジュールが反応する。例えば電動機が制御されてまたは制御されずに通電され、これによってこのアクチュエータモジュールに割り当てられた摩擦クラッチが開放されることによって反応する。機能障害に対する反応のために、機能障害の伝送後、他方のアクチュエータモジュール2,3において位置調節器8が直接アクセスされるか、または機能可能なアクチュエータモジュールの非常運転に対するルーティン14が開始される。このようにして、例えば機能障害を有する部分パワートレインにてギアが噛み合っている場合にはこのギアを切り離した後に、まだ機能可能な部分パワートレインが、自動的に牽引力の中断およびギア選択の制限を伴って動作することができる。摩擦クラッチの制御は、ルーティン14か、または機能ソフトウェアにて行われるルーティンの1つによって実施することができる。
【0018】
2つのアクチュエータ2,3には、給電線15によって自動車の搭載電源網から電気エネルギが供給される。制御線路16は、アクチュエータ2,3の活動化および非活動化を、例えばイグニッション信号またはスタートスイッチによる自動車の運転開始に基づいて制御する。アクチュエータモジュール2,3のエネルギ供給機能は、有利には他のアクチュエータモジュール3,2によってチェックすることができる。このようにして例えば、ケーブルの断傷後、ヒューズの焼き切れ後、またはプラグの脱落後に給電線路において供給電圧が降下した場合には、ブロック12,13にて機能障害が確認されることによって検出することができる。このために制御ユニット4は以下のように制御線路16と接続される、すなわち、給電線路15の欠損時に、少ないエネルギ需要に対して設計された制御ユニット4の給電が出力段5なしに保証され、機能障害の信号伝送がデータ線路11を介して得られるように接続される。制御線路16が上に挙げた理由によって遮断されている場合には、このことを該当するアクチュエータモジュールにおいて確認することができ、エラーメッセージをCANバスよって中央の制御ユニット4に転送することができる。制御線路16の遮断は、アクチュエータ2,3の機能に対して影響を及ぼさない。制御ユニット4が欠損した場合には、他方のアクチュエータモジュールがこのことを、データ線路11を介した通信エラーによって検出でき、このアクチュエータモジュールが相応のステップを開始することができる。
【0019】
図2は、図1に例示したようなアクチュエータモジュールの機能を示す概略図である。機能層Kxにおいて、機能ソフトウェアから電動機のための設定すべき所期の調整値が出力され、これによって電動機と摩擦クラッチとの間の変速比を考慮して摩擦クラッチの操作距離または係脱距離が出力される。位置調節器において相応する電気的な調整値が検出されて、電動機の通電のために出力段Kxに出力される。これとは平行に第2の監視層において監視Kxが実行され、該監視Kxは、調整値の生の値(raw value)を前記機能層Kxにおける調整値によって確認する。この比較が妥当である場合には出力段Kxのイネーブルが行われる。これとは独立して第3層において、制御ユニットのマイクロプロセッサの機能をチェックする別のチェック手段が、プログラムフロー制御、メモリテスト、または命令テストの形態で実行される。この監視の動作状態はデータ線路を介して他方のアクチュエータモジュールに転送され、監視モジュールによって判断される。監視が妥当である場合には出力段Kxが第2経路によってイネーブルされる。2つの監視、すなわち妥当な調整値が存在し、マイクロプロセッサが実行されたテストに合格したことがチェックされると初めて出力段がイネーブルされ、これとは平行に、動作状態にエラーが無いことが他のアクチュエータモジュールに伝送される。2つの層の1つに不合理が存在する場合には出力段は切り替えられない。つまり、電動機、ひいては摩擦クラッチの目下の位置が凍結される。相応のメッセージが他方のアクチュエータモジュールに伝送され、非常運転が開始される。非常運転は、例えば直ちにこのアクチュエータモジュールに割り当てられた摩擦クラッチを制御するか、可能な限り迅速に開放する。
【0020】
図3は、上位制御装置117ならびに2つのアクチュエータユニット102,103を備えるアクチュエータ101をブロック図として概略的に示しており、該2つのアクチュエータユニット102,103は、自身に割り当てられた摩擦クラッチを操作する電動機と、該電動機を制御するプロセッサユニットとを備えている。ここで各アクチュエータモジュール102,103は、それぞれデータ線路104,105によって上位制御装置117と接続されている。さらに2つのアクチュエータモジュール102,103は、それぞれ1つのデータ線路106,107によって互いに接続されている。データ線路104,105,106,107は、物質的に別個の線路とすることも、CANバスのようなデータ通信の構成部材とすることもできる。矢印として図示されたデータ線路はここでは単にデータの流れ方向を表している。データ線路は物理的に双方向の信号線路として構成可能であることを理解されたい。
【0021】
上位制御装置117においては、この場合第1層または制御階層にて、上位の車両データの要求または運転者の要求から制御量を検出する機能ソフトウェアを実現することができる。このような制御量は、アクチュエータモジュール102,103によって操作される摩擦クラッチを制御、すなわち操作するためのものである。さらにこの層とは独立して第2層を設けることができ、この第2層においては、機能ソフトウェアから出力された制御量の妥当性が確認されて監視される。例えばプロセッサ、または、第1層のプロシージャとは独立して動作するプロセッサのモジュールは、冗長的におよび/または別の計算式に基づいて妥当性量を計算することができ、該妥当性量は前記機能ソフトウェアの制御量と比較される。制御量と妥当性量とが著しくずれる場合には非常運転を開始することができ、この非常運転においては例えば所属の電動機が遮断される。
【0022】
直接または第3層として上位制御装置は、別の監視された量を、データ線路104,105を介してアクチュエータモジュール102,103に伝送することができる。2つのアクチュエータモジュール102,103はこの監視された量の妥当性を改めて監視し、例えばこの妥当性チェックの結果に基づいて例えば電動機の遮断を実行することができる。このために交差的にそれぞれ他方のアクチュエータモジュール102,103において監視ルーティンを実行することができ、該監視ルーティンはそれぞれ他方のアクチュエータモジュール103,102に伝送される。この際アクチュエータモジュール102,103の監視のために、上位制御装置117における妥当性チェックの結果と他方のアクチュエータモジュール103,102における妥当性チェックの結果とが互いに比較され、2つの妥当性チェックの結果が同一である場合にのみ該当する電動機がスイッチオフされる。2つの結果の相違は、例えば個々の監視ユニットにおけるプロセッサの故障、またはこれらの間の線路断損に起因する。
【符号の説明】
【0023】
1 クラッチアクチュエータ
2 アクチュエータモジュール
3 アクチュエータモジュール
4 制御ユニット
5 出力段
6 電動機
7 整流ユニット
8 位置調整器
9 機能ソフトウェア
10 CANバス
11 データ線路
12 ブロック
13 ブロック
14 ルーティン
15 給電線路
16 制御線路
101 クラッチアクチュエータ
102 アクチュエータモジュール
103 アクチュエータモジュール
104 データ線路
105 データ線路
106 データ線路
107 データ線路
117 制御装置
【特許請求の範囲】
【請求項1】
少なくとも2つの摩擦クラッチを備えるマルチクラッチを操作するためのクラッチアクチュエータ(1)であって、
該クラッチアクチュエータ(1)は、少なくとも2つのアクチュエータモジュール(2,3)を有し、
該少なくとも2つのアクチュエータモジュール(2,3)は、それぞれ、1つの電動機(6)と、該電動機によって駆動される1つの係脱機構を備えており、
前記係脱機構は、それぞれ、該係脱機構を操作するための1つの摩擦クラッチに作用し、ならびに、前記電動機(6)の制御および電流供給のための1つの制御ユニット(4)に作用する、
形式のクラッチアクチュエータにおいて、
前記少なくとも2つのアクチュエータモジュール(2,3)は互いにデータ線路(11)によって接続されている、
ことを特徴とするクラッチアクチュエータ(1)。
【請求項2】
前記データ線路(11)を介してアクチュエータモジュール(2,3)の動作状態が交換される、
ことを特徴とする請求項1記載のクラッチアクチュエータ(1)。
【請求項3】
アクチュエータモジュール(2,3)の動作状態に依存して少なくとも1つの別のアクチュエータの機能が制御される、
ことを特徴とする請求項2記載のクラッチアクチュエータ(1)。
【請求項4】
アクチュエータモジュール(2,3)の障害時に、エラー信号が、前記データ線路(11)を介して少なくとも1つの別のアクチュエータ(3,2)に伝送され、少なくとも1つの第2のアクチュエータ(2,3)は非常運転にて動作される、
ことを特徴とする請求項2または3記載のクラッチアクチュエータ(1)。
【請求項5】
非常運転時に、障害を有するアクチュエータモジュール(2,3)の係脱機構の駆動が停止され、少なくとも1つのアクチュエータモジュール(3,2)は自身に割り当てられた摩擦クラッチを開放する、
ことを特徴とする請求項4記載のクラッチアクチュエータ(1)。
【請求項6】
アクチュエータモジュール(2,3)は、少なくとも1つの別の制御装置によって信号接続されている、
ことを特徴とする請求項1から5のいずれか一項記載のクラッチアクチュエータ(1)。
【請求項7】
各アクチュエータモジュール(2,3)の制御ユニット(4)に冗長的に電気エネルギが供給される、
ことを特徴とする請求項1から6のいずれか一項記載のクラッチアクチュエータ(1)。
【請求項8】
少なくとも1つのノーマルクローズド型の摩擦クラッチを操作するための、請求項1から7のいずれか一項記載のクラッチアクチュエータ(1)。
【請求項9】
アクチュエータモジュール(102,103)の監視は、上位制御装置(117)およびそれぞれ別のアクチュエータモジュール(103,102)によって行われる、
ことを特徴とする請求項1から8のいずれか一項記載のアクチュエータモジュール(101)。
【請求項10】
アクチュエータモジュール(102,103)の停止は、監視された量に基づいて以下の場合にのみ行われる、すなわち、アクチュエータモジュールの前記監視された量が、上位制御装置(117)においても他方のアクチュエータモジュール(103,102)においても停止を要求する場合にのみ行われる、
ことを特徴とする請求項9記載のクラッチアクチュエータ(101)。
【請求項11】
少なくとも2つの摩擦クラッチを備えるマルチクラッチを操作するためのクラッチアクチュエータ(1)の制御方法であって、
該クラッチアクチュエータ(1)は、少なくとも2つのアクチュエータモジュール(2,3)を有し、
該少なくとも2つのアクチュエータモジュール(2,3)は、それぞれ、1つの電動機(6)と、該電動機によって駆動される1つの係脱機構を備えており、
前記係脱機構は、それぞれ、該係脱機構を操作するための1つの摩擦クラッチに作用し、ならびに、前記電動機(6)の制御および電流供給のための1つの制御ユニット(4)に作用する、
形式のクラッチアクチュエータの制御方法において、
前記少なくとも2つのアクチュエータモジュール(2,3)は互いにデータ線路(11)によって接続されており、
アクチュエータモジュール(2,3)の機能可能性の監視は、少なくとも1つの第2のアクチュエータモジュール(2,3)において行われる、
ことを特徴とする方法。
【請求項12】
前記データ線路(11)を介して第1のアクチュエータモジュール(2,3)の状態情報が、少なくとも1つの別のアクチュエータモジュール(3,2)に伝送される、
ことを特徴とする請求項11記載の方法。
【請求項13】
少なくとも1つの別のアクチュエータモジュール(2,3)は、前記第1のアクチュエータモジュール(2,3)の障害についての前記状態情報をチェックし、障害が検出された場合には非常運転に切り替える、
ことを特徴とする請求項12記載の方法。
【請求項14】
非常運転時に、前記第1のアクチュエータモジュール(2,3)の駆動が停止され、前記少なくとも1つの別のアクチュエータモジュール(3,2)は自身に割り当てられた摩擦クラッチを開放する、
ことを特徴とする請求項13記載の方法。
【請求項15】
非常運転時に、トランスミッションを制御するために設けられた制御ユニットに信号が出力され、
該制御ユニットが、機能障害を有するアクチュエータモジュール(2,3)を備えた摩擦クラッチに割り当てられている部分パワーユニットにおいて噛み合っているギアを切り離す、
ことを特徴とする請求項12または13記載の方法。
【請求項16】
少なくとも2つの摩擦クラッチを備えるマルチクラッチを操作するためのクラッチアクチュエータ(101)の制御方法であって、
該クラッチアクチュエータ(1)は、少なくとも2つのアクチュエータモジュール(102,103)および上位制御装置(117)を有し、
該少なくとも2つのアクチュエータモジュール(102,103)は、それぞれ、1つの電動機と、該電動機によって駆動される1つの係脱機構を備えており、
該係脱機構は、それぞれ、該係脱機構を操作するための1つの摩擦クラッチに作用し、ならびに、それぞれ1つの前記アクチュエータモジュール(102,103)に設けられた、前記電動機(6)の制御および電流供給のための1つの制御ユニット(4)に作用し、
前記上位制御装置(117)は、2つのアクチュエータモジュールを監視および制御する、
形式のクラッチアクチュエータの制御方法において、
前記少なくとも2つのアクチュエータモジュール(102,103)は互いにデータ線路(106.107)によって接続されており、
アクチュエータモジュール(102,103)の機能可能性の監視は、少なくとも1つの第2のアクチュエータモジュール(103,102)および前記上位制御装置(117)によって行われる、
ことを特徴とする方法。
【請求項17】
前記アクチュエータモジュール(102,103)の機能可能性を監視する量は、前記上位制御装置(117)および別のアクチュエータモジュール(103,102)において検出される、
ことを特徴とする請求項16記載の方法。
【請求項18】
前記機能可能性は、前記上位制御装置(117)および前記別のアクチュエータモジュール(103,102)において前記監視する量が同じ大きさであることが確認された場合にのみ、制限されていると認識される、
ことを特徴とする請求項17記載の方法。
【請求項1】
少なくとも2つの摩擦クラッチを備えるマルチクラッチを操作するためのクラッチアクチュエータ(1)であって、
該クラッチアクチュエータ(1)は、少なくとも2つのアクチュエータモジュール(2,3)を有し、
該少なくとも2つのアクチュエータモジュール(2,3)は、それぞれ、1つの電動機(6)と、該電動機によって駆動される1つの係脱機構を備えており、
前記係脱機構は、それぞれ、該係脱機構を操作するための1つの摩擦クラッチに作用し、ならびに、前記電動機(6)の制御および電流供給のための1つの制御ユニット(4)に作用する、
形式のクラッチアクチュエータにおいて、
前記少なくとも2つのアクチュエータモジュール(2,3)は互いにデータ線路(11)によって接続されている、
ことを特徴とするクラッチアクチュエータ(1)。
【請求項2】
前記データ線路(11)を介してアクチュエータモジュール(2,3)の動作状態が交換される、
ことを特徴とする請求項1記載のクラッチアクチュエータ(1)。
【請求項3】
アクチュエータモジュール(2,3)の動作状態に依存して少なくとも1つの別のアクチュエータの機能が制御される、
ことを特徴とする請求項2記載のクラッチアクチュエータ(1)。
【請求項4】
アクチュエータモジュール(2,3)の障害時に、エラー信号が、前記データ線路(11)を介して少なくとも1つの別のアクチュエータ(3,2)に伝送され、少なくとも1つの第2のアクチュエータ(2,3)は非常運転にて動作される、
ことを特徴とする請求項2または3記載のクラッチアクチュエータ(1)。
【請求項5】
非常運転時に、障害を有するアクチュエータモジュール(2,3)の係脱機構の駆動が停止され、少なくとも1つのアクチュエータモジュール(3,2)は自身に割り当てられた摩擦クラッチを開放する、
ことを特徴とする請求項4記載のクラッチアクチュエータ(1)。
【請求項6】
アクチュエータモジュール(2,3)は、少なくとも1つの別の制御装置によって信号接続されている、
ことを特徴とする請求項1から5のいずれか一項記載のクラッチアクチュエータ(1)。
【請求項7】
各アクチュエータモジュール(2,3)の制御ユニット(4)に冗長的に電気エネルギが供給される、
ことを特徴とする請求項1から6のいずれか一項記載のクラッチアクチュエータ(1)。
【請求項8】
少なくとも1つのノーマルクローズド型の摩擦クラッチを操作するための、請求項1から7のいずれか一項記載のクラッチアクチュエータ(1)。
【請求項9】
アクチュエータモジュール(102,103)の監視は、上位制御装置(117)およびそれぞれ別のアクチュエータモジュール(103,102)によって行われる、
ことを特徴とする請求項1から8のいずれか一項記載のアクチュエータモジュール(101)。
【請求項10】
アクチュエータモジュール(102,103)の停止は、監視された量に基づいて以下の場合にのみ行われる、すなわち、アクチュエータモジュールの前記監視された量が、上位制御装置(117)においても他方のアクチュエータモジュール(103,102)においても停止を要求する場合にのみ行われる、
ことを特徴とする請求項9記載のクラッチアクチュエータ(101)。
【請求項11】
少なくとも2つの摩擦クラッチを備えるマルチクラッチを操作するためのクラッチアクチュエータ(1)の制御方法であって、
該クラッチアクチュエータ(1)は、少なくとも2つのアクチュエータモジュール(2,3)を有し、
該少なくとも2つのアクチュエータモジュール(2,3)は、それぞれ、1つの電動機(6)と、該電動機によって駆動される1つの係脱機構を備えており、
前記係脱機構は、それぞれ、該係脱機構を操作するための1つの摩擦クラッチに作用し、ならびに、前記電動機(6)の制御および電流供給のための1つの制御ユニット(4)に作用する、
形式のクラッチアクチュエータの制御方法において、
前記少なくとも2つのアクチュエータモジュール(2,3)は互いにデータ線路(11)によって接続されており、
アクチュエータモジュール(2,3)の機能可能性の監視は、少なくとも1つの第2のアクチュエータモジュール(2,3)において行われる、
ことを特徴とする方法。
【請求項12】
前記データ線路(11)を介して第1のアクチュエータモジュール(2,3)の状態情報が、少なくとも1つの別のアクチュエータモジュール(3,2)に伝送される、
ことを特徴とする請求項11記載の方法。
【請求項13】
少なくとも1つの別のアクチュエータモジュール(2,3)は、前記第1のアクチュエータモジュール(2,3)の障害についての前記状態情報をチェックし、障害が検出された場合には非常運転に切り替える、
ことを特徴とする請求項12記載の方法。
【請求項14】
非常運転時に、前記第1のアクチュエータモジュール(2,3)の駆動が停止され、前記少なくとも1つの別のアクチュエータモジュール(3,2)は自身に割り当てられた摩擦クラッチを開放する、
ことを特徴とする請求項13記載の方法。
【請求項15】
非常運転時に、トランスミッションを制御するために設けられた制御ユニットに信号が出力され、
該制御ユニットが、機能障害を有するアクチュエータモジュール(2,3)を備えた摩擦クラッチに割り当てられている部分パワーユニットにおいて噛み合っているギアを切り離す、
ことを特徴とする請求項12または13記載の方法。
【請求項16】
少なくとも2つの摩擦クラッチを備えるマルチクラッチを操作するためのクラッチアクチュエータ(101)の制御方法であって、
該クラッチアクチュエータ(1)は、少なくとも2つのアクチュエータモジュール(102,103)および上位制御装置(117)を有し、
該少なくとも2つのアクチュエータモジュール(102,103)は、それぞれ、1つの電動機と、該電動機によって駆動される1つの係脱機構を備えており、
該係脱機構は、それぞれ、該係脱機構を操作するための1つの摩擦クラッチに作用し、ならびに、それぞれ1つの前記アクチュエータモジュール(102,103)に設けられた、前記電動機(6)の制御および電流供給のための1つの制御ユニット(4)に作用し、
前記上位制御装置(117)は、2つのアクチュエータモジュールを監視および制御する、
形式のクラッチアクチュエータの制御方法において、
前記少なくとも2つのアクチュエータモジュール(102,103)は互いにデータ線路(106.107)によって接続されており、
アクチュエータモジュール(102,103)の機能可能性の監視は、少なくとも1つの第2のアクチュエータモジュール(103,102)および前記上位制御装置(117)によって行われる、
ことを特徴とする方法。
【請求項17】
前記アクチュエータモジュール(102,103)の機能可能性を監視する量は、前記上位制御装置(117)および別のアクチュエータモジュール(103,102)において検出される、
ことを特徴とする請求項16記載の方法。
【請求項18】
前記機能可能性は、前記上位制御装置(117)および前記別のアクチュエータモジュール(103,102)において前記監視する量が同じ大きさであることが確認された場合にのみ、制限されていると認識される、
ことを特徴とする請求項17記載の方法。
【図1】

【図2】
【図3】
【図2】
【図3】
【公表番号】特表2011−508859(P2011−508859A)
【公表日】平成23年3月17日(2011.3.17)
【国際特許分類】
【出願番号】特願2010−541015(P2010−541015)
【出願日】平成20年12月11日(2008.12.11)
【国際出願番号】PCT/DE2008/002072
【国際公開番号】WO2009/082994
【国際公開日】平成21年7月9日(2009.7.9)
【出願人】(390009070)ルーク ラメレン ウント クツプルングスバウ ベタイリグングス コマンディートゲゼルシャフト (236)
【氏名又は名称原語表記】LuK Lamellen und Kupplungsbau Beteiligungs KG
【住所又は居所原語表記】Industriestrasse 3, D−77815 Buehl, Germany
【Fターム(参考)】
【公表日】平成23年3月17日(2011.3.17)
【国際特許分類】
【出願日】平成20年12月11日(2008.12.11)
【国際出願番号】PCT/DE2008/002072
【国際公開番号】WO2009/082994
【国際公開日】平成21年7月9日(2009.7.9)
【出願人】(390009070)ルーク ラメレン ウント クツプルングスバウ ベタイリグングス コマンディートゲゼルシャフト (236)
【氏名又は名称原語表記】LuK Lamellen und Kupplungsbau Beteiligungs KG
【住所又は居所原語表記】Industriestrasse 3, D−77815 Buehl, Germany
【Fターム(参考)】
[ Back to top ]