
クランク付車輪を備える車両
【課題】平地での滑らかな移動性と荒れ地での高い不整地踏破性があり、車輪型車両の堅牢性と防塵防水性を発揮する移動機構を提供すること。
【解決手段】 車両における車輪10Lおよび車輪10Rにおいて、タイヤのトレッド部に直交する外側サイドウォール部に連なるホイールには、伸縮可能なリンク部材14L、14Rの一端が連結されており、リンク部材14L,14Rの他端が、球形自在車輪16Rが設けられる支持軸20の一端に回動可能に連結されているもの。
【解決手段】 車両における車輪10Lおよび車輪10Rにおいて、タイヤのトレッド部に直交する外側サイドウォール部に連なるホイールには、伸縮可能なリンク部材14L、14Rの一端が連結されており、リンク部材14L,14Rの他端が、球形自在車輪16Rが設けられる支持軸20の一端に回動可能に連結されているもの。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、クランク付車輪を備える車両に関する。
【背景技術】
【0002】
車輪型およびクローラ型のレスキューロボット(以下、ロボットともいう)が、一般に、実用に供されている。このようなロボットにおいては、平坦地での滑らかな移動性能のみならず、階段における昇降や災害現場の悪路における推進が可能であるような高い踏破性、軽量性、防塵防水性、および、低価格性等が要望されている。
車輪型は、機構が単純で軽量であり防塵防水性を上げやすい。しかし、凹凸に車輪が嵌まって抜け出せなくなるというような問題がある。クローラ型は、車輪よりははるかに荒地踏破性が高いが、クローラベルトの内側に砂や小石が入ると、それが駆動プーリの間に挟み込みやすい。そのため、防塵防水性を向上するには、クローラ側面を摺動するシール材で覆うなどが必要で、エネルギ損失があり高価になるという難点がある。
【0003】
これ以外に、車輪にクランクを取り付けて不整地踏破性を向上しようとする発明もある。例えば、特許文献1にも示されるような、階段昇降車が提案されている。この昇降車は、車体に設けられるモータ付車輪と、モータに固定されるプレートと、車輪の接続軸に接続される回転体と、プレートの上端接続端に取り付けられる振り子とを含んで構成されている。プレートの下端接続端には、車体が取り付けられている。このような構成において、回転体の端部が階段に固定される場合、モータが作動状態とされるとき、プレートおよび振り子が合体した状態で一体となって回転することにより、車輪が地面から浮き上がった後、車輪が上段に乗り移ることとなる。
また、例えば、特許文献2にも示されるように、階段昇降装置において、電動機が作動状態とされる場合、車輪が一方のクランクを介して上昇および下降運動され、昇降脚が他方のクランクを介して上昇および下降運動せしめられる構成が提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−132908号公報
【特許文献2】米国特許第6397960号公報明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述のような階段昇降車および階段昇降装置の構成においては、例えば、上述のようなロボットに対し適用された場合、凹凸のある悪路において走行するとき、車輪が悪路における凹部に落ち込まないような構成、あるいは、凹部に落ち込んだ車輪が凹部から抜け出す手段を備えていない。そのため、これらの装置では悪路を踏破できない。
本発明は、新たな構成のクランク付車輪を導入することによって、車輪の様な堅牢で防塵防水性と、クローラの様な対地適応性を有する、クランク付車輪を備える車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述の目的を達成するために、本発明に係るクランク付車輪を備える車両は、進行方向に対し直交する方向に延びる回転中心軸線の回りに回動する一対の車輪を、進行方向に沿って所定距離だけ離隔した第1の端部および第2の端部のうち、第1の端部に有する本体部と、本体部に配され一対の車輪を駆動する駆動手段と、伸縮可能なリンク部材の一方の端部に設けられたフックの根元が第1の端部における一対の車輪の側部に連結ピンを介して回転中心軸線に対し半径方向に所定距離、偏心した位置に連結され、他方の端部が本体部の側部に対向し、第2の端部に回動自在に連結される複数のリンク部材と、を備え、一対の車輪が回動される場合、複数のリンク部材の一方の端部に設けられたフックの先端が車輪の回動に追従して進行方向と上下方向に往復回転運動され、複数のリンク部材が停止せしめられる場合、一対の車輪が連結ピンを中心として回動しながら、一方向に移動することを特徴とする。
【発明の効果】
【0007】
本発明に係るクランク付車輪を備える車両によれば、一対の車輪が回動される場合、複数のリンク部材の一方の端部が車輪の回動に追従して進行方向および前後方向に往復回転運動され、複数のリンク部材が停止せしめられる場合、一対の車輪が連結ピンを中心として回動しながら、一方向に移動するので例えば、リンク部材が悪路における凹部を跨ぐように配置された場合、一対の車輪が連結ピンを中心として回動しながら移動できる。従って、ロボットに適用し得るように、悪路においても容易に踏破できる。
【図面の簡単な説明】
【0008】
【図1】本発明に係るクランク付車輪を備える車両の第1実施例を概略的に示す斜視図である。
【図2】図1に示される車両の構成を示す構成図である。
【図3】図1に示される車両の動作説明に供される斜視図である。
【図4】(a),(b),(c),(d),(e),(f)は、図1に示される車両の動作説明に供される図である。
【図5】(a),(b),(c),(d),(e),(f)は、図1に示される車両の動作説明に供される図である。
【図6】(a),(b),(c),(d),(e),(f)は、図1に示される車両の動作説明に供される図である。
【図7】本発明に係るクランク付車輪を備える車両の第2実施例を概略的に示す斜視図である。
【図8】本発明に係るクランク付車輪を備える車両の第3実施例を概略的に示す斜視図である。
【図9】図8に示される例における本体部の内部の構成を示す構成図である。
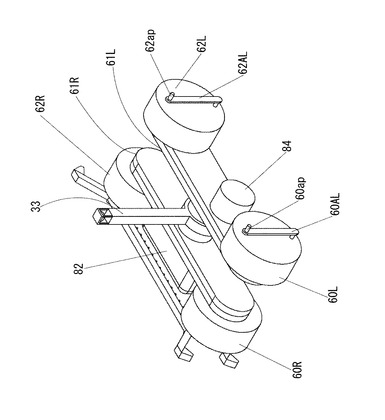
【図10】図8に示される例において、リンク部材を取り外した状態を示す斜視図である。
【図11】図8に示される例において、リンク部材を取り外した状態で、電装品ユニットの内部を示す図である。
【図12】図8に示される例における動作説明に供される斜視図である。
【図13】図8に示される例における動作説明に供される斜視図である。
【図14】(a)乃至(f)は、図8に示される例における動作説明に供される図である。
【図15】(g)乃至(k)は、図8に示される例における動作説明に供される図である。
【図16】(l)乃至(p)は、図8に示される例における動作説明に供される図である。
【図17】本発明に係るクランク付車輪を備える車両の第4実施例の構成を概略的に示す構成図である。
【図18】本発明に係るクランク付車輪を備える車両の第5実施例の構成を概略的に示す斜視図である。
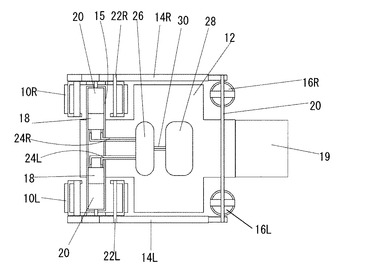
【図19】図16に示される例における平面図である。
【図20】図16に示される例における側面図である。
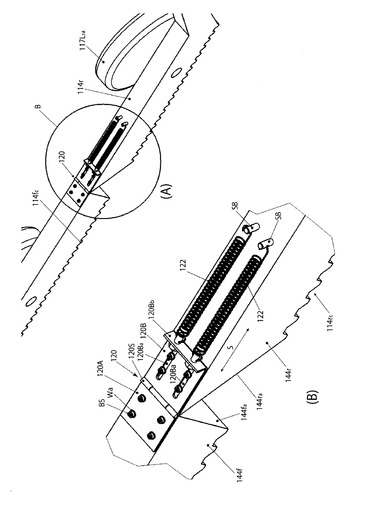
【図21】(A)は、図16に示される例におけるリンク部材を部分的に拡大して示す斜視図であり、(B)は、(A)におけるB部を拡大して示す拡大図である。
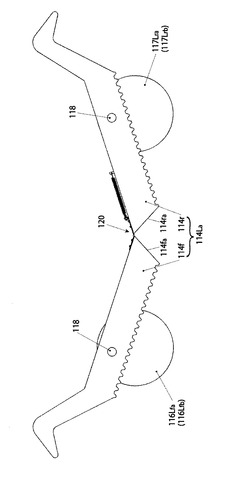
【図22】図16に示される例における動作説明に供される図である。
【発明を実施するための形態】
【0009】
図1は、本発明に係るクランク付車輪を備える車両の第1実施例の外観を示す。
【0010】
図1において、車両は、後述する制御ユニットを内蔵する本体部12と、本体部12の一方の端部に相対向する一対の車輪10Rおよび10Lと、本体部12における車輪10Rおよび10L相互間に配され車両の周囲環境を撮影する監視カメラ部32Cを支持するカメラ用アーム部32と、本体部12におけるカメラ用アーム32に向き合うように本体部12の他方の端部に配される移動補助アームとしての尾部19と、本体部12の両側部と一対の車輪10Rおよび10Lの側面とに対向するように配されるリンク部材14Lおよび14Rを主な要素として構成される。
【0011】
車輪10Rおよび10Lは、それぞれ、例えば、タイヤと、タイヤを支持するホイールとからなる。車輪10Rおよび10Lは、それぞれ、図2に示されるように、後述する本体部12に設けられる駆動用モータユニット15内の各ギヤヘッド20の出力軸に連結されている。これにより、車輪10Rおよび10Lの回転中心軸線は、互いに共通の直線上にある。また、車輪10Rおよび10Lは、本体部12の長手方向に延びる一方の端部に直交する回転中心軸線の回りに回動可能に支持されることとなる。
【0012】
本体部12は、図2に示されるように、複数のギヤヘッド20およびモータ18を内蔵する駆動用モータユニット15と、監視カメラ部32Cからの撮像データに基づいてモータ18の動作制御を行う制御ユニット26と、制御ユニット26および駆動用モータユニット15等に電力を供給するバッテリー28とを備えている。
各ギヤヘッド20は、モータ18からの出力を所定の減速比で減速させ出力する減速機構を備えている。駆動用モータユニット15における各モータ18と制御ユニット26とは、それぞれ、ケーブル24Rおよび24Lにより接続されている。
【0013】
制御ユニット26は、例えば、中央演算処理装置(CPU)と、上述の撮像データ、および、中央演算処理装置(CPU)がモータ18の動作制御に必要とされる各データを格納するとともに、記憶された各データを供給する記憶部とを含んで構成される。バッテリー28と制御ユニット26とは、ケーブル30により接続されている。
【0014】
車輪10Rにおいて、タイヤのトレッド部に直交する外側サイドウォール部に連なるホイールには、伸縮可能なリンク部材14Rの一端が連結されている。リンク部材14Rの他端は、球形自在車輪16Rが設けられる支持軸20の一端に回動可能に連結されている。支持軸20は、本体部12の長手方向に延びる他方の端部を各モータ18の配列方向に沿って貫通している。
【0015】
リンク部材14Rは、車輪10Rに連結される前方リンク部材14aと、支持軸20に連結される後方リンク部材14bとを主な要素として構成されている。前方リンク部材14aは、鉤状の係合部14Tを先端部に有している。前方リンク部材14aにおける係合部14Tよりも後方側には、連結ピン22Rの一端が嵌合される孔が形成されている。前方リンク部材14aにおける後方端部における下端面には、走行中、階段の端部または障害物相互間の摩擦力を増大させる所定の長さを有する凹凸部14cが形成されている。
後方リンク部材14bの一端は、前方リンク部材14aにおける後方端部の開口を通じて前方リンク部材14a内に移動可能に挿入されている。これにより、前方リンク部材14aおよび後方リンク部材14bは、互いに近接または離隔可能とされるのでリンク部材14Rの全長が伸縮することとなる。
連結ピン22Rは、図1および図2に示されるように、車輪10Rの回転中心軸線に対し所定距離、偏心した位置でホイールを貫通している。
車輪10Lにおいて、タイヤのトレッド部に直交する外側サイドウォール部に連なるホイールには、伸縮可能なリンク部材14Lの一端が連結されている。リンク部材14Lの他端は、球形自在車輪16Lが設けられる支持軸20の他端に回動可能に連結されている。
リンク部材14Lの構造は、リンク部材14Rの構造と同一とされるのでその重複説明を省略する。
これにより、車輪10Rと前方リンク部材14aとが連結ピン22Rにより連結され、所謂、クランクが形成されることとなる。また、車輪10Lと前方リンク部材14aとが連結ピン22Rにより連結され、所謂、クランクが形成されることとなる。
【0016】
従って、図3に示されるように、車両が矢印Mの示す方向に前進する場合、車輪10Rおよび10Lが反時計回り方向に回転され、前方リンク部材14aの係合部14Tが車輪10Rおよび10Lの外周部よりも前方に突出するとき、前方リンク部材14aは、車輪10Rおよび10Lの回転に追従して後方リンク部材14bに対し離隔するのでリンク部材14Rおよび14Lは、伸長状態となる。一方、図1に示されるように、車両が矢印Mの示す方向に前進する場合、車輪10Rおよび10Lが反時計回り方向に回転され、前方リンク部材14aの係合部14Tが車輪10Rおよび10Lの側方にあるとき、前方リンク部材14aは、車輪10Rおよび10Lの回転に追従して後方リンク部材14bに対し近接するのでリンク部材14Rおよび14Lは、縮小状態となる。
尾部19は、例えば、国際公開第WO/2009/110592号公報にも示されるような、弾性部材で作られ、本体部12の長手方向に延びる他方の端部に弾性を有して回動可能に支持されている。
【0017】
斯かる構成において、平坦地であれば、このリンク部材は往復回転運動を続けるが、地面には車輪のみが接地するので、車輪による滑らかな走行運動が持続される。
そして、荒れ地においては、このリンク部材のクランク運動が不整地走破性を向上する。つまり、図4(a)に示されるように、車両が、例えば、障害物BR1と障害物BR2との間に窪みReが形成されている悪路BRを走行する場合、車両の車輪10Rおよび10Lが窪みReの縁を乗り越えたとき、図4(b)に示されるように、前方リンク部材14aの係合部14Tが障害物BR1に到達する。その際、前方リンク部材14aの凹凸部14cが障害物BR2に当接し、尾部19が路面を押圧する。これにより、車両の車輪10Rおよび10Lが窪みRe内に完全に落ち込む虞がない。続いて、図4(c)および(d)に示されるように、車輪10Rおよび10Lがそれぞれ、連結ピン22Rおよび22Lの回りをさらに回転されるとき、リンク部材14Rおよび14Lが縮小状態に移行するので車輪10Rおよび10Lは、その側方に係合部14Tがある位置まで本体部12を伴って移動し障害物BR1に到達する。そして、車輪10Rおよび10Lがさらに回転中心軸線回りに回転される場合、図4(e)および(f)に示されるように、車輪10Rおよび10Lが障害物BR1を乗り上がり、リンク部材14Rおよび14Lがさらに縮小状態に移行するので係合部14Tが障害物BR1に対し離隔される。車輪10Rおよび10Lが障害物BR1を通過した後、球形自在車輪16Rおよび16Lも、尾部19により窪みRe内に完全に落ち込む虞がない。
また、上述の車両は、図5(a)に示されるように、例えば、複数の踏み面を有する階段状の走行路を登坂することも可能とされる。なお、階段における各段の段差(けあげ)は、車輪10Rおよび10Lが走行する路面から係合部14Tまでの最大高さよりも低いものとされる。
【0018】
先ず、図5(a)に示されるように、車両が段差に向かって路面ST1を走行し、係合部14Tが第1の踏み面ST2の段鼻に係合したとき、リンク部材14Rおよび14Lが伸長状態とされる。次に、図5(b)に示されるように、車輪10Rおよび10Lが反時計回り方向に、連結ピン22Rおよび22Lの回りに回転されるとき、車輪10Rおよび10Lは、本体部12を伴って路面ST1から回転しながら本体部12を伴って浮き上がり、図5(c)および図5(d)に示されるように、リンク部材14Rおよび14Lが縮小状態となるように第1の踏み面ST2に向かって移動する。続いて、図5(e)に示されるように、車輪10Rおよび10Lが、回転しながら第1の踏み面ST2の段鼻に当接した場合、さらに車輪10Rおよび10Lがタイヤと段鼻との間の摩擦力に抗して回転中心軸線回りに回転するとき、図5(f)に示されるように、リンク部材14Rおよび14Lの係合部14Tが第1の踏み面ST2の段鼻から離隔されるとともに、車輪10Rおよび10Lが、本体部12を伴って第1の踏み面ST2に乗り上がることとなる。
【0019】
そして、図6(a)に示されるように、車輪10Rおよび10Lが、第1の踏み面ST2において回転され、リンク部材14Rおよび14Lが伸長状態とされるとき、係合部14Tが第2の踏み面ST3の段鼻に係合される。その際、凹凸部14cが第1の踏み面ST2の段鼻に当接されるので車両全体の下方への移動が抑制される。
【0020】
車両が第1の踏み面ST2から第2の踏み面ST3に移動する場合、図6(b)に示されるように、車輪10Rおよび10Lが連結ピン22Rおよび22Lの回りに反時計回り方向に、回転されるとき、車輪10Rおよび10Lは、第1の踏み面ST2から回転しながら本体部12を伴って浮き上がり、図6(c)に示されるように、リンク部材14Rおよび14Lが縮小状態となるように第2の踏み面ST3に向かって移動する。続いて、図6(d)に示されるように、車輪10Rおよび10Lが、回転中心軸線の回りに回転しながら第2の踏み面ST3の段鼻に当接した場合、リンク部材14Rおよび14Lの係合部14Tが第2の踏み面ST3の段鼻から離隔され、さらに車輪10Rおよび10Lがタイヤと段鼻との間の摩擦力に抗して回転中心軸線の回りに回転するとき、図6(e)および図6(f)に示されるように、車輪10Rおよび10Lが、第2の踏み面ST3に乗り上がることとなる。
従って、車両は、上述の動作を繰り返すことにより、複数の踏み面を有する階段状の走行路を登坂できることとなる。
【0021】
さらに、上述の例においては、従来のクローラを用いた不整地踏破機構と比較して、はるかに簡潔な駆動系構成であるので軽量に出来て搬送性に優れる。例えば、上述の車両の本体部12に、フック付キャリアベルトの各フックが係合される留め具を設けることにより、レスキュー隊員が、フック付キャリアベルトを用いて背中に担いで搬送もできる。
なお、上述の例においては、球形自在車輪16Rおよび16Lが備えられているが、
必ずしもこのようにされる必要がなく、例えば、球形自在車輪16Rおよび16Lを備えることなく、後方リンク部材14bの端部が路面に直接摺動される構成であってもよい。また、後方リンク部材14bの端部が本体部に対し摺動可能なスライド機構を介して連結されてもよい。さらに、後方リンク部材14bの端部がリンク部材を介して本体部に対して揺動可能に連結されてもよい。
図7は、本発明に係るクランク付車輪を備える車両の第2実施例の外観を示す。
図1に示される例では、車両が2輪車とされたが、その代わりに、図7においては、車両が4輪車とされる。なお、図7において、図1において同一の構成要素について同一の符号を付して示しその重複説明を省略する。
【0022】
図7において、車両は、制御ユニットを内蔵する本体部52と、本体部52の双方の端部にそれぞれ、相対向する一対の車輪40Rおよび40Lと、相対向する一対の車輪44Rおよび44Lと、本体部52における車輪40Rおよび40L相互間に配され車両の周囲環境を撮影する監視カメラ部32Cを支持するカメラ用アーム部32と、本体部52におけるカメラ用アーム32に向き合うように本体部52の他方の端部に配される移動補助アームとしての尾部19と、本体部52の両側部と一対の車輪40Rおよび40L、44Rおよび44Lの側面とに対向するように配されるリンク部材54Lおよび54Rとを主な要素として構成される。
【0023】
車輪40Rおよび40L、車輪44Rおよび44Lは、それぞれ、例えば、タイヤと、タイヤを支持するホイールとからなる。車輪40Rおよび40L、車輪44Rおよび44Lは、それぞれ、図示が省略されるが、後述する本体部52に設けられる駆動用モータユニット内の各ギヤヘッドの出力軸に連結されている。これにより、車輪40Rおよび40L、車輪44Rおよび44Lの回転中心軸線は、互いに共通の直線上にある。また、車輪40Rおよび40L、車輪44Rおよび44Lは、本体部52の長手方向に延びる端部に直交する回転中心軸線の回りに回動可能に支持されることとなる。
本体部52は、図示が省略されるが、複数のギヤヘッドおよびモータを内蔵する駆動用モータユニットと、監視カメラ部32Cからの撮像データに基づいてモータの動作制御を行う制御ユニットと、制御ユニットおよび駆動用モータユニット等に電力を供給するバッテリーとを備えている。
【0024】
制御ユニットは、例えば、中央演算処理装置(CPU)と、上述の撮像データ、および、中央演算処理装置(CPU)がモータの動作制御に必要とされる各データを格納するとともに、記憶された各データを供給する記憶部とを含んで構成される。バッテリーと制御ユニットとは、ケーブルにより接続されている。
【0025】
車輪40Rおよび車輪44Rにおいて、タイヤのトレッド部に直交する外側サイドウォール部に連なるホイールには、リンク部材54Rの一端および他端が連結されている。リンク部材54Rの一端は、車輪40Rに回動可能に連結され、リンク部材54Rの他端は、車輪44Rに回動可能に連結されている。
リンク部材54Rは、鉤状の係合部54Tを先端部に有している。リンク部材54Rの係合部54Tよりも後方側には、連結ピン42の一端が嵌合される孔が形成されている。リンク部材54Rの後端部にも、連結ピン42の一端が嵌合される孔が形成されている。
【0026】
リンク部材54Rにおける連結ピン42相互間の中間部における下端面には、走行中、階段の端部または障害物相互間の摩擦力を増大させる所定の長さを有する凹凸部54cが形成されている。連結ピン42は、車輪40R、車輪44Rの回転中心軸線に対し所定距離、偏心した位置でホイールを貫通している。
リンク部材54Lの構造は、リンク部材54Rの構造と同一とされるのでその重複説明を省略する。
これにより、車輪40Rおよび44Rとリンク部材54Rとが連結ピン42により連結され、所謂、クランクが形成されることとなる。また、車輪40Lおよび44Lとリンク部材54Lとが連結ピン42により連結され、所謂、クランクが形成されることとなる。
図8は、本発明に係るクランク付車輪を備える車両の第3実施例の外観を概略的に示す。
【0027】
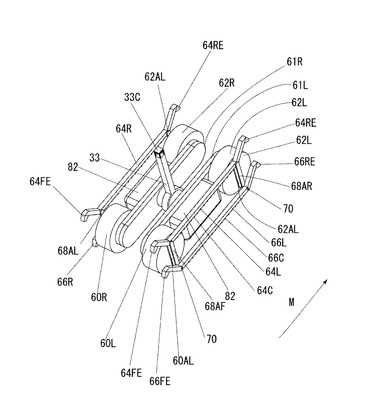
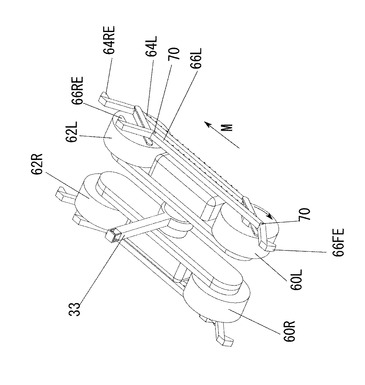
図8において、車両は、後述する制御ユニット等を内蔵する電装品ユニット82が付設された本体部61Rおよび61Lと、本体部61Rの双方の端部にそれぞれ、設けられる一対の車輪60Rおよび62Rと、本体部61Lの双方の端部にそれぞれ、設けられる一対の車輪60Lおよび62Lと、本体部61Rの中央部と本体部61Lの中央部とを連結する連結部63に揺動可能に設けられ、車両の周囲環境を撮影する監視カメラ部33Cを支持するカメラ用スイングアーム部33と、本体部61Rの電装品ユニット82と一対の車輪60Rおよび62Rの側面とに向き合うように配されるリンク部材64Rおよび66Rと、本体部61Lの電装品ユニット82と一対の車輪60Lおよび62Lの側面とに向き合うように配されるリンク部材64Lおよび66Lと、を主な要素として構成される。
【0028】
車輪60Rおよび62R、車輪60Lおよび62Lは、それぞれ、例えば、タイヤと、タイヤを支持するホイールとからなる。車輪60Rおよび62Rは、それぞれ、後述する本体部61Rに回動可能に設けられるスプロケット80Fおよび80Rに連結されている。また、車輪60Lおよび62Lは、それぞれ、後述する本体部61Lに回動可能に設けられるスプロケット80Fおよび80Rに連結されている。これにより、車輪60Rおよび車輪60Lの回転中心軸線は、互いに共通の直線上にある。また、車輪62Rおよび62Lの回転中心軸線は、互いに共通の直線上にある。車輪60Rおよび62Rは、本体部61Rにおける双方の端部に車両の進行方向に対し直交する回転軸線の回りに回動可能に支持されることとなる。車輪60Lおよび62Lは、本体部61Lにおける双方の端部に車両の進行方向に対し直交する回転軸線の回りに回動可能に支持されることとなる。
本体部61Rおよび61Lは、互いに同一の構造を有するので本体部61Lについて説明し、本体部61Rの説明を省略する。
【0029】
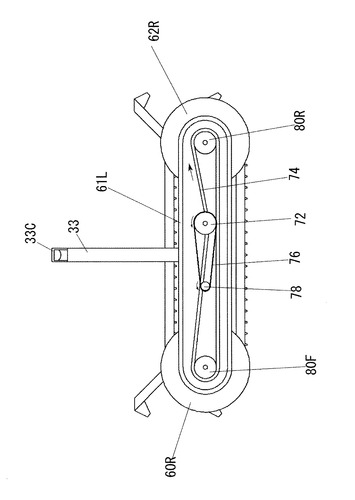
本体部61Lは、図9に示されるように、所定の間隔をもって回動可能に設けられる一対のスプロケット80Fおよび80Rと、一対のスプロケット80Fおよび80R相互間に巻き掛けられるチェーン74と、チェーン74に掛けられるスプロケット(不図示)の回転軸と同心の軸上に配される減速用プーリ72と、減速用プーリ72と所定の相互間隔をもって配されるピニオンプーリ78と、電装品ユニット82内に配される駆動用モータ84(図10および図11参照)とを含んで構成されている。
ピニオンプーリ78は、駆動用モータ84の出力軸に連結されている。また、タイミングベルト76が、ピニオンプーリ78と減速用プーリ72との相互間に巻き掛けられている。駆動用モータ84は、例えば、DCモータ、あるいは、正転または逆転可能なリバーシブルモータであってもよい。
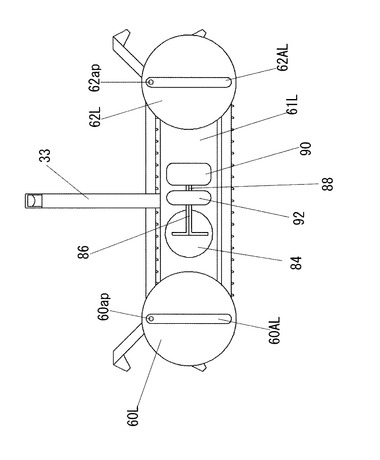
また、電装品ユニット82内には、図11に示されるように、監視カメラ部33Cからの撮像データに基づいて駆動モータ84の動作制御を行う制御ユニット92と、制御ユニット92および駆動用モータ84等に電力を供給するバッテリー90とが備えられている。
【0030】
制御ユニット92は、例えば、中央演算処理装置(CPU)と、上述の撮像データ、および、中央演算処理装置(CPU)が駆動用モータ84の動作制御に必要とされる各データを格納するとともに、記憶された各データを供給する記憶部とを含んで構成される。バッテリー90と制御ユニット92とは、ケーブル88により接続されている。制御ユニット92と駆動用モータ84との間は、ケーブル86によって接続されている。
【0031】
斯かる構成により、制御ユニット92により駆動用モータ84が作動状態とされる場合、例えば、図9において、矢印の示す反時計回り方向に回転されるピニオンプーリ78の回動力は、その回転数が、減速用プーリ72により減速された後、スプロケットを介してチェーン74に伝達される。これにより、チェーン74が矢印の示す方向に移動するので車両は、図8において、矢印Mの示す方向に進行することとなる。
【0032】
車輪60Lにおいて、タイヤのトレッド部に直交する外側サイドウォール部に連なるホイールには、図10に示されるように、連結アーム60ALの一端が連結されている。連結アーム60ALの一端は、車輪60Lの回転中心軸線に対し所定距離、半径方向に偏心した位置に連結されている。連結アーム60ALの他端には、後述するリンク部材64Lに連結される連結ピン60apが設けられている。また、車輪62Lにおいて、タイヤのトレッド部に直交する外側サイドウォール部に連なるホイールには、図10に示されるように、連結アーム62ALの一端が連結されている。連結アーム62ALの一端は、車輪62Lの回転中心軸線に対し所定距離、半径方向に偏心した位置に連結されている。連結アーム62ALの他端には、後述するリンク部材64Lに連結される連結ピン62apが設けられている。図10および図11において、連結アーム60ALおよび62ALは、互いに略平行となるように車輪60Lおよび62Lに取り付けられている。
【0033】
一方、図8に示されるように、車輪60Rにおいて、タイヤのトレッド部に直交する外側サイドウォール部に連なるホイールには、連結アーム60ALの一端が連結されている。連結アーム60ALの一端は、車輪60Rの回転中心軸線に対し所定距離、半径方向に偏心した位置に連結されている。連結アーム60ALの他端には、後述するリンク部材64Rに連結される連結ピンが設けられている。また、車輪62Rにおいて、タイヤのトレッド部に直交する外側サイドウォール部に連なるホイールには、連結アーム62ALの一端が連結されている。連結アーム62ALの一端は、車輪62Rの回転中心軸線に対し所定距離、半径方向に偏心した位置に連結されている。連結アーム62ALの他端には、後述するリンク部材64Rに連結される連結ピンが設けられている。連結アーム60ALおよび62ALは、互いに略平行となるように車輪60Rおよび62Rに取り付けられている。
リンク部材64Lおよび64Rは、互いに同一の構造を有するのでリンク部材64Lについて説明し、リンク部材64Rについての説明を省略する。
【0034】
リンク部材64Lは、図8に示されるように、上述の連結アーム60ALの連結ピン60ap、連結アーム62ALの連結ピン62apが挿入される孔(不図示)を所定の間隔をもって両端に有している連結部と、この連結部の両端にそれぞれ、形成される鉤状の係合部64FEおよび64REとを含んで構成されている。連結部の下端面には、走行中、階段の端部または障害物相互間の摩擦力を増大させる所定の長さを有する凹凸部64Cが形成されている。
【0035】
係合部64FEおよび64REは、その鉤部が互いに逆方向向きとなるように形成されている。また、リンク部材64Lには、連結される連結アーム60ALに対向して連結アーム68AFの一端がリンク部材64Lに回動可能に連結されている。連結アーム68AFの他端は、リンク部材66Lに連結ピン70を介して回動可能に連結されている。
さらに、リンク部材64Lには、連結される連結アーム62ALに対向して連結アーム68ARの一端がリンク部材64Lに回動可能に連結されている。連結アーム68ARの他端は、リンク部材66Lに連結ピン70を介して回動可能に連結されている。
【0036】
リンク部材66Lは、図8に示されるように、上述の連結ピン70が挿入される孔(不図示)を所定の間隔をもって両端に有している連結部と、この連結部の両端にそれぞれ、形成される鉤状の係合部66FEおよび66REとを含んで構成されている。連結部の下端面には、走行中、階段の端部または障害物相互間の摩擦力を増大させる所定の長さを有する凹凸部66Cが形成されている。係合部66FEおよび66REは、その鉤部が互いに逆方向向きとなるように形成されている。従って、リンク部材66Lは、本体部61L側に近い内側に配されるリンク部材64Lに連動して回動せしめられる。
【0037】
これにより、車輪60Rおよび62Rとリンク部材64Rとが連結ピン60ap,62apにより連結され、所謂、クランクが形成されることとなる。また、車輪60Lおよび62Lとリンク部材64Lとが連結ピン60ap,62apにより連結され、所謂、クランクが形成されることとなる。さらに加えて、車輪60Rおよび62Rに連動するリンク部材66Rによるクランク、および、車輪60Lおよび62Lに連動するリンク部材66Lによるクランクが形成される。
【0038】
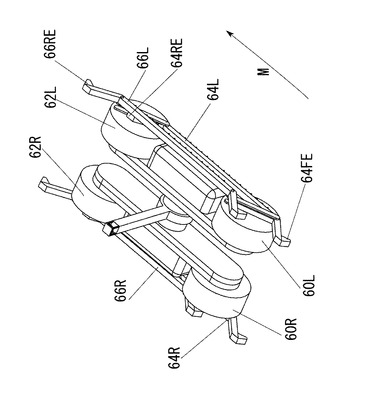
斯かる構成において、図8に示される状態で、駆動用モータ84が作動状態とされる場合、車輪60R,60L、62R、62Lが、例えば、図12における矢印で示される方向、即ち、時計回り方向に回転されるとき、車両が、矢印Mの示す方向に進行し、リンク部材64Lの係合部64REおよびリンク部材64Rの係合部64REが,それぞれ、車輪62Lおよび車輪62Rの外周部よりも進行方向に突出し、一方、リンク部材66Lの係合部66FEおよびリンク部材66Rの係合部66FEが車輪60Lおよび車輪60Rの外周部よりも進行方向とは逆方向に向けて突出することとなる。
【0039】
さらに、車輪60R,60L、62R、62Lが、同一方向に回転され、車両が、矢印Mの示す方向に進行した場合、図13に示されるように、リンク部材66Lの係合部66REおよびリンク部材66Rの係合部66REが,それぞれ、車輪62Lおよび車輪62Rの外周部よりも進行方向に突出し、一方、リンク部材64Lの係合部64FEおよびリンク部材64Rの係合部64FEが車輪60Lおよび車輪60Rの外周部よりも進行方向とは逆方向に向けて突出することとなる。
従って、車輪60R,60L、62R、62Lが、例えば、図12における矢印で示される方向とは逆方向、即ち、反時計回り方向に回転される場合、車両が、矢印Mの示す方向とは逆方向に進行することとなる。
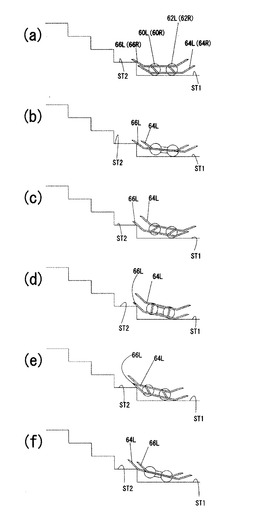
上述の車両は、図14(a)に示されるように、例えば、複数の踏み面を有する階段状の走行路を登坂することも可能とされる。なお、階段における各段の段差(けあげ)は、車輪60Rおよび60L、62Rおよび62Lが走行する路面から係合部66FEまでの最大高さよりも低いものとされる。
【0040】
先ず、図14(a)に示されるように、車両が段差に向かって路面ST1を走行し、リンク部材66Lの係合部66FEが第1の踏み面ST2の段鼻に係合したとき、リンク部材66Lの係合部66FEおよびリンク部材66Rの係合部66FEが車輪60Rおよび60Lよりも前方に突出し、リンク部材64Lの係合部64FEおよびリンク部材64Rの係合部64FEが車輪62Rおよび62Lよりも後方に突出することとなる。
【0041】
次に、図14(b)に示されるように、車輪60Rおよび60L、車輪62Rおよび62Lが連結ピン70の回りに反時計回り方向に、回転されるとき、車輪60Rおよび60Lは、路面ST1から回転しながら本体部61Rおよび61Lを伴って浮き上がり、図14(c)および図14(d)に示されるように、第1の踏み面ST2に向かって移動する。また、リンク部材64Lおよびリンク部材64Rは、連結ピン60apおよび62apの回転に伴って移動せしめられる。
【0042】
続いて、図14(e)および(f)に示されるように、リンク部材64Lの係合部64FEが第1の踏み面ST2の段鼻に係合したとき、リンク部材64Lの係合部64FEおよびリンク部材64Rの係合部64FEが車輪60Rおよび60Lよりも前方に突出し、リンク部材66Lの係合部66FEおよびリンク部材66Rの係合部66FEが車輪62Rおよび62Lよりも後方に突出することとなる。
【0043】
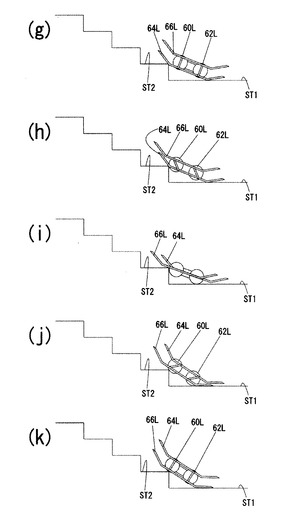
続いて、図15(g)および(h)に示されるように、車輪60Rおよび60L、車輪62Rおよび62Lが連結ピン60apおよび62apの回りに反時計回り方向に、回転されるとき、車輪60Rおよび60Lは浮き上がり状態を保ち、車輪62Rおよび62Lは、路面ST1から回転しながら本体部61Rおよび61Lを伴って浮き上がり、第1の踏み面ST2に向かって移動する。
【0044】
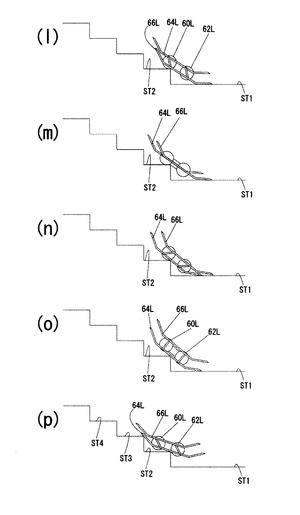
続いて、図15(i)および(j)に示されるように、車輪60Rおよび60Lが、回転しながら第1の踏み面ST2の段鼻に当接した場合、さらに車輪60Rおよび60Lがタイヤと段鼻との間の摩擦力に抗して回転するとき、図15(k)および図16(l)に示されるように、係合部66FEおよび64FEが第1の踏み面ST2の段鼻から離隔されるとともに、車輪60Rおよび60Lが、第1の踏み面ST2に乗り上がることとなる。
そして、図16(m)および(n)に示されるように、車輪60Rおよび60Lが、第1の踏み面ST2において回転中心軸線回りに回転される。その際、凹凸部64cが第1の踏み面ST2の段鼻に当接されるので車両全体の下方への移動が抑制される。
【0045】
車両が、路面ST1から第1の踏み面ST2に完全に移動する場合、図16(o)に示されるように、車輪60Rおよび60L、車輪62Rおよび62Lが、連結ピン60apおよび62apの回りにリンク部材66Lを伴って反時計回り方向に、回転されるとき、図16(p)に示されるように、車輪62Rおよび662Lは、路面ST1から回転しながら本体部61Rおよび61Lを伴って浮き上がる。従って、車両は、上述の動作を繰り返すことにより、複数の踏み面を有する階段状の走行路を登坂できることとなる。
【0046】
図17は、本発明に係るクランク付車輪を備える車両の第4実施例の外観を概略的に示す。 図8に示される例においては、監視カメラ部33Cを支持するカメラ用アーム部33を備えるものとされるが、図17に示される例においては、さらに加えて、車両が、本体部の上部に基台106を備えるものとされる。基台106は、Z軸線回りに旋回可能な肩旋回関節機構部108を有している。肩旋回関節機構部108には、肩屈伸関節機構部104が連結されている。肩屈伸関節機構部104は、先端に手開閉関節機構部100を有する肘屈伸関節機構102に連結されている。
【0047】
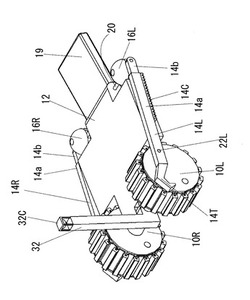
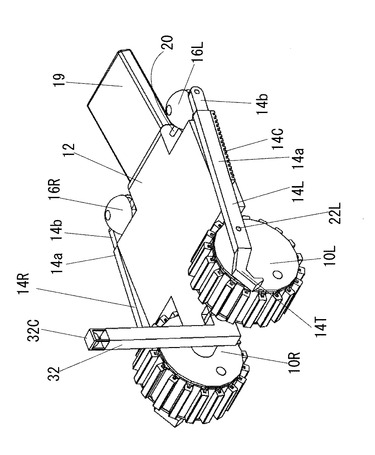
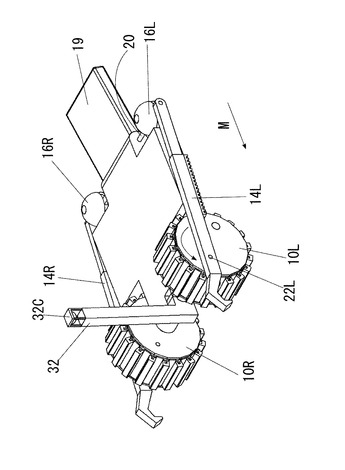
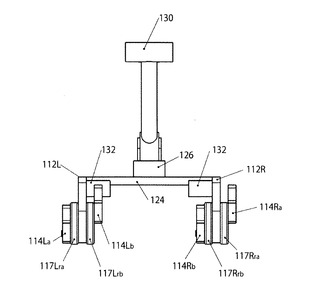
図18は、本発明に係るクランク付車輪を備える車両の第5実施例の外観を概略的に示す。
図18において、車両は、制御ユニット等を内蔵する電装品ユニット(不図示)が付設された本体部112Rおよび112Lと、本体部112Rの双方の端部にそれぞれ、設けられる一対のダブルの車輪116Rfa,116Rfbおよび117Rra,117Rrbと、本体部112Lの双方の端部にそれぞれ、設けられる一対のダブルの車輪116Lfa,116Lfbおよび117Lra,117Lrbと、本体部112Rの中央部と本体部112Lの中央部とを連結する連結基板部124と、本体部112Rの外側における車輪116Rfaおよび車輪117Rraの側面と向き合うように配されるリンク部材114Raと、本体部112Rの内側における車輪116Rfbおよび車輪117Rrbの側面と向き合うように配されるリンク部材114Rbと、本体部112Lの外側における車輪116Lfaおよび車輪117Lraの側面と向き合うように配されるリンク部材114Laと、本体部112Lの内側における車輪116Lfbおよび車輪117Lrbの側面と向き合うように配されるリンク部材114Lbと、を主な要素として構成される。
【0048】
ダブルの車輪116Rfaおよび116Rfb、117Rraおよび117Rrbは、それぞれ、例えば、タイヤと、タイヤを支持するホイールとからなる。車輪116Rfaおよび116Rfb、117Rraおよび117Rrbは、それぞれ、後述する本体部112Rに回動可能に設けられる支持軸112RSに支持されるとともに、支持軸112RSに設けられるスプロケット(不図示)に連結されている。これにより、ダブルの車輪116Rfaおよび116Rfbの回転中心軸線は、互いに共通の直線上にある。ダブルの117Rraおよび117Rrbの回転中心軸線は、互いに共通の直線上にある。
【0049】
また、ダブルの車輪116Lfaおよび116Lfb、117Lraおよび117Lrbは、それぞれ、例えば、タイヤと、タイヤを支持するホイールとからなる。ダブルの車輪116Lfaおよび116Lfb、117Lraおよび117Lrbは、それぞれ、後述する本体部112Lに回動可能に設けられる支持軸112LSに支持され、支持軸112LSに設けられるスプロケット(不図示)に連結されている。これにより、ダブルの車輪116Lfaおよび116Lfbの回転中心軸線は、互いに共通の直線上にある。ダブルの117Lraおよび117Lrbの回転中心軸線は、互いに共通の直線上にある。
従って、ダブルの車輪116Rfaおよび116Rfb、117Rraおよび117Rrbは、本体部112Rにおける双方の端部に車両の進行方向に対し直交する回転軸線の回りに回動可能に支持されることとなる。
また、ダブルの車輪116Lfaおよび116Lfb、117Lraおよび117Lrbは、本体部112Lにおける双方の端部に車両の進行方向に対し直交する回転軸線の回りに回動可能に支持されることとなる。
【0050】
連結基板部124の上面には、基台126が設けられている。基台126は、図18において、Z軸線回りに旋回可能な肩旋回関節機構部を有している。肩旋回関節機構部には、肩屈伸関節機構部128が連結されている。肩屈伸関節機構部128は、先端に手開閉関節機構部を有する肘屈伸関節機構130に連結されている。
本体部112Rおよび112Lは、互いに同一の構造を有するので本体部112Lについて説明し、本体部112Rの説明を省略する。
本体部112Lは、所定の間隔をもって回動可能に設けられる支持軸112LSに連結される一対のスプロケットと、その一対のスプロケット相互間に巻き掛けられるチェーンと、ギヤヘッド付駆動用モータ132とを含んで構成されている。
【0051】
駆動用モータ132のギヤヘッドは、所定の減速比の歯車減速機構部を有している。ギヤヘッドの出力軸には、上述のチェーンと噛み合うスプロケットが連結されている。駆動用モータ132は、例えば、DCモータ、あるいは、正転または逆転可能なリバーシブルモータであってもよい。駆動用モータ132は、図示が省略される電装ユニット内の制御ユニットにより駆動制御される。制御ユニットは、例えば、中央演算処理装置(CPU)と、中央演算処理装置(CPU)が駆動用モータ132の動作制御に必要とされる各データを格納するとともに、記憶された各データを供給する記憶部とを含んで構成される。
これにより、制御ユニットにより、作動状態とされる駆動用モータ132からの回動力がギヤヘッドの出力軸を介して上述のチェーンに伝達されるのでダブルの車輪116Lfaおよび116Lfb、117Lraおよび117Lrbが時計回り方向、あるいは、反時計回り方向に回動されることとなる。
リンク部材114Raおよび114Rbと、リンク部材114Laおよび114Lbとは、互いに同一の構造を有するのでリンク部材114Laおよび114Lbについて説明し、リンク部材114Raおよび114Rbについての説明を省略する。
【0052】
リンク部材114Laは、図18に示されるように、ヒンジ機構120を介して互いに変位可能に連結される二つのリンク部材114fおよび114rを含んで構成されている。リンク部材114fおよび114rには、それぞれ、連結ピン118の一端が挿入される孔が形成されている。その孔の相互間隔は、図18に示されるように、二つのリンク部材114fおよび114rが共通の直線上にある場合、一定の距離Lとなるように設定されている。リンク部材114fおよび114rにおける上述の孔よりも先端側には、それぞれ、鉤状の係合部114FEおよび114REが形成されている。従って、鉤状の係合部114FEおよび114REは、ヒンジ機構120が設けられる端部に向き合っている。また、鉤状の係合部114FEおよび114REは、その鉤部が互いに逆方向向きとなるように形成されている。
【0053】
リンク部材114fおよび114rにおける下端面には、それぞれ、所定の長さを有し、走行中、階段の端部または障害物相互間の摩擦力を増大させる凹凸部114fc、114rcが形成されている。また、ヒンジ機構120によって連結されるリンク部材114fおよび114rにおける連結端は、図21(A)に示されるように、斜面部114faおよび114raを有している。
【0054】
各連結ピン118の他端は、車輪116Lfaおよび117Lraのホイールにおける支持軸112LSの回転中心軸線から半径方向に所定距離、偏心した位置に連結されている。その所定距離および各連結ピン118の他端の支持軸112LSの回転中心軸線に対する相対位置は、同一に設定されている。
【0055】
ヒンジ機構120は、図21(A)および(B)に拡大されて示されるように、リンク部材114fの上面に固定される固定部120Aと、リンク部材114rの上面に配され、リンク部材114rの連結端をリンク部材114fの連結端に対し近接または離隔可能に支持する可動部120Bと、リンク部材114rの連結端をリンク部材114fの連結端に対し近接する方向に付勢する一対のコイルスプリング122とを含んで構成されている。
【0056】
固定部120Aは、小ネジBSおよびワッシャーWaにより、リンク部材114fの上面に固定されている。また、可動部120Bは、固定部120Aに対して連結ピン120Sにより回動可能に連結されている。可動部120Bは、互いに平行に所定の間隔で形成される長孔120Baを有している。長孔120Baは、リンク部材114rの連結端がリンク部材114fの連結端に対し近接または離隔する方向に沿って形成されている。小ネジBSはワッシャーWaを介して長孔120Baを通じてリンク部材114rの雌ねじに捩じ込まれている。これにより、可動部120Bの長孔120Baの周縁は、小ネジBSおよびリンク部材114rを上述の近接または離隔する方向に沿って案内することとなる。
各コイルスプリング122の一端は、可動部120Bの屈曲部120Bbに連結され、各コイルスプリング122の他端は、リンク部材114rにおけるヒンジ機構120から先端側に離隔した位置に固定されるストッパSBに係止されている。
【0057】
リンク部材114Lbは、リンク部材114Laと同様に、上述のヒンジ機構120を介して互いに変位可能に連結される二つのリンク部材114fおよび114rを含んで構成されている。リンク部材114fおよび114rには、それぞれ、連結ピン118の一端が挿入される孔が形成されている。その孔の相互間隔は、二つのリンク部材114fおよび114rが共通の直線上にある場合、一定の距離Lとなるように設定されている。リンク部材114fおよび114rにおける上述の孔よりも先端側には、それぞれ、鉤状の係合部114FEおよび114REが形成されている。従って、鉤状の係合部114FEおよび114REは、ヒンジ機構120が設けられる端部に向き合っている。また、鉤状の係合部114FEおよび114REは、その鉤部が互いに逆方向向きとなるように形成されている。
【0058】
リンク部材114fおよび114rにおける下端面には、それぞれ、所定の長さを有し走行中、階段の端部または障害物相互間の摩擦力を増大させる凹凸部114fc、114rcが形成されている。また、ヒンジ機構120によって連結されるリンク部材114fおよび114rにおける連結端は、斜面部114faおよび114raを有している。
【0059】
各連結ピン118の他端は、車輪116Lfbおよび117Lrbのホイールにおける支持軸112LSの回転中心軸線から半径方向に所定距離、偏心した位置に連結されている。その所定距離および各連結ピン118の他端の支持軸112LSの回転中心軸線に対する相対位置は、互いに同一に設定されている。また、リンク部材114Lbにおける各連結ピン118の他端の偏心量は、リンク部材114Laにおける各連結ピン118の他端の偏心量と同一に設定されている。
【0060】
なお、図19および図20に示されるように、リンク部材114Lbは、車輪116Lfbおよび117Lrbを介して平行に配されるリンク部材114Laに対し車両の進行方向に沿って後方にずれている。また、リンク部材114Lbの位置は、リンク部材114Laの位置に対し高く設定されている。従って、リンク部材114Lbの各連結ピン118の他端の円周方向に沿った角度位置は、リンク部材114Laの各連結ピン118の他端の円周方向に沿った角度位置に対し所定の角度だけずれている。
【0061】
斯かる構成により、リンク部材114aおよび114Lbにおけるリンク部材114fの連結端は、図18に示されるようなリンク部材114rの連結端と面一となる状態から図22に示されるように、リンク部材114Laおよび114Lbがそれぞれ、折れ曲がり下方に向けて凸状となるように、リンク部材114rの連結端に対し変位可能とされる。即ち、リンク部材114Laおよび114Lbは、ヒンジ機構120により、リンク部材114fおよび114rが互いに交差し所定の角度をなすように折れ曲がるとともに、リンク部材114fおよび114rが伸縮することとなる。これにより、車両が、例えば、階段状の走行路を登坂する場合、リンク部材114Laがその段差に対しより滑らかに適応できるようになるという効果を奏する。
【0062】
以上の説明から明らかなように、上述の本発明に係るリンク部材をクランクとして取り付けた車輪を備える車両の各実施例においては、クローラベルトの使用をやめて、車輪運動を利用している。そして車輪に取り付けたリンク部材は、通常の車輪推進時には往復回転運動を持続するが、地面に接地しないので車輪推進には干渉しないため滑らかな車輪走行ができる。なおリンク部材を取り付けたことによる動的なアンバランスはバランサーを取り付けることで相殺できる。また、車輪に対して、クランクシャフトを着脱可能にして、平地走行時には、クランクシャフトを非連結とし、リンク部材を連動して往復回転運動しない様にすることで動的アンバランスが生じない様にする構造の導入も有効である。そして荒れ地においては、リンク部材が大きな不整地踏破性を発揮する。たとえば、複数の踏み面を有する階段状の走行路を登坂する場合、車両はこれらの動輪だけでは登れないが、リンク部材が階段をグリップしている間に、クランクシャフトに偏心して取り付けられた動輪が前方に運ばれるので動輪は上の段に上がる。これにより、車両が階段を歩行的に上昇する。また、悪路等の不整地の移動時に、車輪が凹部に嵌まっても、リンク部材が不整地を押し付けて車輪を凹部から引き抜き前方に置くので歩行動作を混入しながら容易に前進できる。このように本発明によれば、平地での高速走行性と不整地での対地適応移動性の両方が簡単な構造で容易に実現できる。また、本発明の一例においては、機構が単純で、クローラベルトの外れ等の問題がなく、車両全体を弾性体等で覆うことができるので車両が堅牢で耐衝撃性が高い。さらに、実用化のために著しく重要な価格の低減化も容易に図れる。その車両は、車輪型で無限回転軸のシールのみで完全防塵防水性となり、洗浄も容易であり、水中での使用も可能である。提案するクランク付車輪を備える車両は、実用上著しく有効な諸特性を発揮する。この車両をレスキューロボットに適用することにより、この研究開発によって、これまで世界的にも全く見られなかった日本独自の実用的なレスキューロボットが、実現できると考えられる。
【符号の説明】
【0063】
10R,10L,60R,60L,62R,62L 車輪
12 本体部
14R,14L,54R,54L,64R,64L,66R,66L リンク部材
16R,16L 球形自在車輪
18,84,132 モータ
19 尾部
61R,61L 本体部
84 駆動用モータ
120 ヒンジ機構
【技術分野】
【0001】
本発明は、クランク付車輪を備える車両に関する。
【背景技術】
【0002】
車輪型およびクローラ型のレスキューロボット(以下、ロボットともいう)が、一般に、実用に供されている。このようなロボットにおいては、平坦地での滑らかな移動性能のみならず、階段における昇降や災害現場の悪路における推進が可能であるような高い踏破性、軽量性、防塵防水性、および、低価格性等が要望されている。
車輪型は、機構が単純で軽量であり防塵防水性を上げやすい。しかし、凹凸に車輪が嵌まって抜け出せなくなるというような問題がある。クローラ型は、車輪よりははるかに荒地踏破性が高いが、クローラベルトの内側に砂や小石が入ると、それが駆動プーリの間に挟み込みやすい。そのため、防塵防水性を向上するには、クローラ側面を摺動するシール材で覆うなどが必要で、エネルギ損失があり高価になるという難点がある。
【0003】
これ以外に、車輪にクランクを取り付けて不整地踏破性を向上しようとする発明もある。例えば、特許文献1にも示されるような、階段昇降車が提案されている。この昇降車は、車体に設けられるモータ付車輪と、モータに固定されるプレートと、車輪の接続軸に接続される回転体と、プレートの上端接続端に取り付けられる振り子とを含んで構成されている。プレートの下端接続端には、車体が取り付けられている。このような構成において、回転体の端部が階段に固定される場合、モータが作動状態とされるとき、プレートおよび振り子が合体した状態で一体となって回転することにより、車輪が地面から浮き上がった後、車輪が上段に乗り移ることとなる。
また、例えば、特許文献2にも示されるように、階段昇降装置において、電動機が作動状態とされる場合、車輪が一方のクランクを介して上昇および下降運動され、昇降脚が他方のクランクを介して上昇および下降運動せしめられる構成が提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−132908号公報
【特許文献2】米国特許第6397960号公報明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述のような階段昇降車および階段昇降装置の構成においては、例えば、上述のようなロボットに対し適用された場合、凹凸のある悪路において走行するとき、車輪が悪路における凹部に落ち込まないような構成、あるいは、凹部に落ち込んだ車輪が凹部から抜け出す手段を備えていない。そのため、これらの装置では悪路を踏破できない。
本発明は、新たな構成のクランク付車輪を導入することによって、車輪の様な堅牢で防塵防水性と、クローラの様な対地適応性を有する、クランク付車輪を備える車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述の目的を達成するために、本発明に係るクランク付車輪を備える車両は、進行方向に対し直交する方向に延びる回転中心軸線の回りに回動する一対の車輪を、進行方向に沿って所定距離だけ離隔した第1の端部および第2の端部のうち、第1の端部に有する本体部と、本体部に配され一対の車輪を駆動する駆動手段と、伸縮可能なリンク部材の一方の端部に設けられたフックの根元が第1の端部における一対の車輪の側部に連結ピンを介して回転中心軸線に対し半径方向に所定距離、偏心した位置に連結され、他方の端部が本体部の側部に対向し、第2の端部に回動自在に連結される複数のリンク部材と、を備え、一対の車輪が回動される場合、複数のリンク部材の一方の端部に設けられたフックの先端が車輪の回動に追従して進行方向と上下方向に往復回転運動され、複数のリンク部材が停止せしめられる場合、一対の車輪が連結ピンを中心として回動しながら、一方向に移動することを特徴とする。
【発明の効果】
【0007】
本発明に係るクランク付車輪を備える車両によれば、一対の車輪が回動される場合、複数のリンク部材の一方の端部が車輪の回動に追従して進行方向および前後方向に往復回転運動され、複数のリンク部材が停止せしめられる場合、一対の車輪が連結ピンを中心として回動しながら、一方向に移動するので例えば、リンク部材が悪路における凹部を跨ぐように配置された場合、一対の車輪が連結ピンを中心として回動しながら移動できる。従って、ロボットに適用し得るように、悪路においても容易に踏破できる。
【図面の簡単な説明】
【0008】
【図1】本発明に係るクランク付車輪を備える車両の第1実施例を概略的に示す斜視図である。
【図2】図1に示される車両の構成を示す構成図である。
【図3】図1に示される車両の動作説明に供される斜視図である。
【図4】(a),(b),(c),(d),(e),(f)は、図1に示される車両の動作説明に供される図である。
【図5】(a),(b),(c),(d),(e),(f)は、図1に示される車両の動作説明に供される図である。
【図6】(a),(b),(c),(d),(e),(f)は、図1に示される車両の動作説明に供される図である。
【図7】本発明に係るクランク付車輪を備える車両の第2実施例を概略的に示す斜視図である。
【図8】本発明に係るクランク付車輪を備える車両の第3実施例を概略的に示す斜視図である。
【図9】図8に示される例における本体部の内部の構成を示す構成図である。
【図10】図8に示される例において、リンク部材を取り外した状態を示す斜視図である。
【図11】図8に示される例において、リンク部材を取り外した状態で、電装品ユニットの内部を示す図である。
【図12】図8に示される例における動作説明に供される斜視図である。
【図13】図8に示される例における動作説明に供される斜視図である。
【図14】(a)乃至(f)は、図8に示される例における動作説明に供される図である。
【図15】(g)乃至(k)は、図8に示される例における動作説明に供される図である。
【図16】(l)乃至(p)は、図8に示される例における動作説明に供される図である。
【図17】本発明に係るクランク付車輪を備える車両の第4実施例の構成を概略的に示す構成図である。
【図18】本発明に係るクランク付車輪を備える車両の第5実施例の構成を概略的に示す斜視図である。
【図19】図16に示される例における平面図である。
【図20】図16に示される例における側面図である。
【図21】(A)は、図16に示される例におけるリンク部材を部分的に拡大して示す斜視図であり、(B)は、(A)におけるB部を拡大して示す拡大図である。
【図22】図16に示される例における動作説明に供される図である。
【発明を実施するための形態】
【0009】
図1は、本発明に係るクランク付車輪を備える車両の第1実施例の外観を示す。
【0010】
図1において、車両は、後述する制御ユニットを内蔵する本体部12と、本体部12の一方の端部に相対向する一対の車輪10Rおよび10Lと、本体部12における車輪10Rおよび10L相互間に配され車両の周囲環境を撮影する監視カメラ部32Cを支持するカメラ用アーム部32と、本体部12におけるカメラ用アーム32に向き合うように本体部12の他方の端部に配される移動補助アームとしての尾部19と、本体部12の両側部と一対の車輪10Rおよび10Lの側面とに対向するように配されるリンク部材14Lおよび14Rを主な要素として構成される。
【0011】
車輪10Rおよび10Lは、それぞれ、例えば、タイヤと、タイヤを支持するホイールとからなる。車輪10Rおよび10Lは、それぞれ、図2に示されるように、後述する本体部12に設けられる駆動用モータユニット15内の各ギヤヘッド20の出力軸に連結されている。これにより、車輪10Rおよび10Lの回転中心軸線は、互いに共通の直線上にある。また、車輪10Rおよび10Lは、本体部12の長手方向に延びる一方の端部に直交する回転中心軸線の回りに回動可能に支持されることとなる。
【0012】
本体部12は、図2に示されるように、複数のギヤヘッド20およびモータ18を内蔵する駆動用モータユニット15と、監視カメラ部32Cからの撮像データに基づいてモータ18の動作制御を行う制御ユニット26と、制御ユニット26および駆動用モータユニット15等に電力を供給するバッテリー28とを備えている。
各ギヤヘッド20は、モータ18からの出力を所定の減速比で減速させ出力する減速機構を備えている。駆動用モータユニット15における各モータ18と制御ユニット26とは、それぞれ、ケーブル24Rおよび24Lにより接続されている。
【0013】
制御ユニット26は、例えば、中央演算処理装置(CPU)と、上述の撮像データ、および、中央演算処理装置(CPU)がモータ18の動作制御に必要とされる各データを格納するとともに、記憶された各データを供給する記憶部とを含んで構成される。バッテリー28と制御ユニット26とは、ケーブル30により接続されている。
【0014】
車輪10Rにおいて、タイヤのトレッド部に直交する外側サイドウォール部に連なるホイールには、伸縮可能なリンク部材14Rの一端が連結されている。リンク部材14Rの他端は、球形自在車輪16Rが設けられる支持軸20の一端に回動可能に連結されている。支持軸20は、本体部12の長手方向に延びる他方の端部を各モータ18の配列方向に沿って貫通している。
【0015】
リンク部材14Rは、車輪10Rに連結される前方リンク部材14aと、支持軸20に連結される後方リンク部材14bとを主な要素として構成されている。前方リンク部材14aは、鉤状の係合部14Tを先端部に有している。前方リンク部材14aにおける係合部14Tよりも後方側には、連結ピン22Rの一端が嵌合される孔が形成されている。前方リンク部材14aにおける後方端部における下端面には、走行中、階段の端部または障害物相互間の摩擦力を増大させる所定の長さを有する凹凸部14cが形成されている。
後方リンク部材14bの一端は、前方リンク部材14aにおける後方端部の開口を通じて前方リンク部材14a内に移動可能に挿入されている。これにより、前方リンク部材14aおよび後方リンク部材14bは、互いに近接または離隔可能とされるのでリンク部材14Rの全長が伸縮することとなる。
連結ピン22Rは、図1および図2に示されるように、車輪10Rの回転中心軸線に対し所定距離、偏心した位置でホイールを貫通している。
車輪10Lにおいて、タイヤのトレッド部に直交する外側サイドウォール部に連なるホイールには、伸縮可能なリンク部材14Lの一端が連結されている。リンク部材14Lの他端は、球形自在車輪16Lが設けられる支持軸20の他端に回動可能に連結されている。
リンク部材14Lの構造は、リンク部材14Rの構造と同一とされるのでその重複説明を省略する。
これにより、車輪10Rと前方リンク部材14aとが連結ピン22Rにより連結され、所謂、クランクが形成されることとなる。また、車輪10Lと前方リンク部材14aとが連結ピン22Rにより連結され、所謂、クランクが形成されることとなる。
【0016】
従って、図3に示されるように、車両が矢印Mの示す方向に前進する場合、車輪10Rおよび10Lが反時計回り方向に回転され、前方リンク部材14aの係合部14Tが車輪10Rおよび10Lの外周部よりも前方に突出するとき、前方リンク部材14aは、車輪10Rおよび10Lの回転に追従して後方リンク部材14bに対し離隔するのでリンク部材14Rおよび14Lは、伸長状態となる。一方、図1に示されるように、車両が矢印Mの示す方向に前進する場合、車輪10Rおよび10Lが反時計回り方向に回転され、前方リンク部材14aの係合部14Tが車輪10Rおよび10Lの側方にあるとき、前方リンク部材14aは、車輪10Rおよび10Lの回転に追従して後方リンク部材14bに対し近接するのでリンク部材14Rおよび14Lは、縮小状態となる。
尾部19は、例えば、国際公開第WO/2009/110592号公報にも示されるような、弾性部材で作られ、本体部12の長手方向に延びる他方の端部に弾性を有して回動可能に支持されている。
【0017】
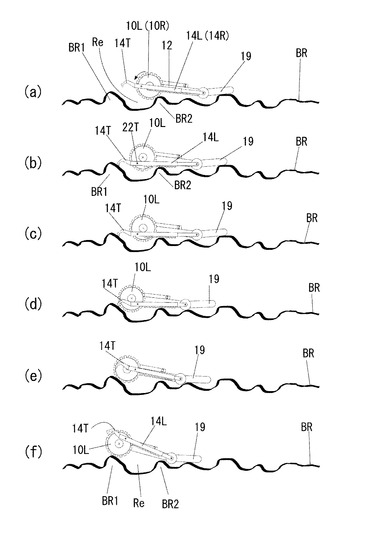
斯かる構成において、平坦地であれば、このリンク部材は往復回転運動を続けるが、地面には車輪のみが接地するので、車輪による滑らかな走行運動が持続される。
そして、荒れ地においては、このリンク部材のクランク運動が不整地走破性を向上する。つまり、図4(a)に示されるように、車両が、例えば、障害物BR1と障害物BR2との間に窪みReが形成されている悪路BRを走行する場合、車両の車輪10Rおよび10Lが窪みReの縁を乗り越えたとき、図4(b)に示されるように、前方リンク部材14aの係合部14Tが障害物BR1に到達する。その際、前方リンク部材14aの凹凸部14cが障害物BR2に当接し、尾部19が路面を押圧する。これにより、車両の車輪10Rおよび10Lが窪みRe内に完全に落ち込む虞がない。続いて、図4(c)および(d)に示されるように、車輪10Rおよび10Lがそれぞれ、連結ピン22Rおよび22Lの回りをさらに回転されるとき、リンク部材14Rおよび14Lが縮小状態に移行するので車輪10Rおよび10Lは、その側方に係合部14Tがある位置まで本体部12を伴って移動し障害物BR1に到達する。そして、車輪10Rおよび10Lがさらに回転中心軸線回りに回転される場合、図4(e)および(f)に示されるように、車輪10Rおよび10Lが障害物BR1を乗り上がり、リンク部材14Rおよび14Lがさらに縮小状態に移行するので係合部14Tが障害物BR1に対し離隔される。車輪10Rおよび10Lが障害物BR1を通過した後、球形自在車輪16Rおよび16Lも、尾部19により窪みRe内に完全に落ち込む虞がない。
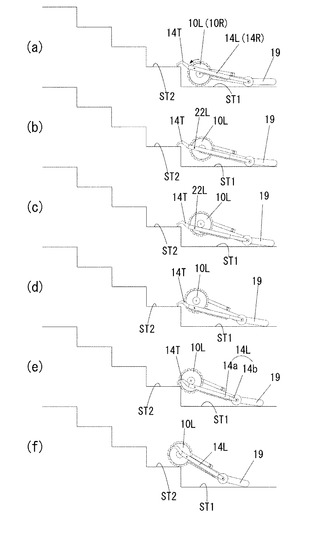
また、上述の車両は、図5(a)に示されるように、例えば、複数の踏み面を有する階段状の走行路を登坂することも可能とされる。なお、階段における各段の段差(けあげ)は、車輪10Rおよび10Lが走行する路面から係合部14Tまでの最大高さよりも低いものとされる。
【0018】
先ず、図5(a)に示されるように、車両が段差に向かって路面ST1を走行し、係合部14Tが第1の踏み面ST2の段鼻に係合したとき、リンク部材14Rおよび14Lが伸長状態とされる。次に、図5(b)に示されるように、車輪10Rおよび10Lが反時計回り方向に、連結ピン22Rおよび22Lの回りに回転されるとき、車輪10Rおよび10Lは、本体部12を伴って路面ST1から回転しながら本体部12を伴って浮き上がり、図5(c)および図5(d)に示されるように、リンク部材14Rおよび14Lが縮小状態となるように第1の踏み面ST2に向かって移動する。続いて、図5(e)に示されるように、車輪10Rおよび10Lが、回転しながら第1の踏み面ST2の段鼻に当接した場合、さらに車輪10Rおよび10Lがタイヤと段鼻との間の摩擦力に抗して回転中心軸線回りに回転するとき、図5(f)に示されるように、リンク部材14Rおよび14Lの係合部14Tが第1の踏み面ST2の段鼻から離隔されるとともに、車輪10Rおよび10Lが、本体部12を伴って第1の踏み面ST2に乗り上がることとなる。
【0019】
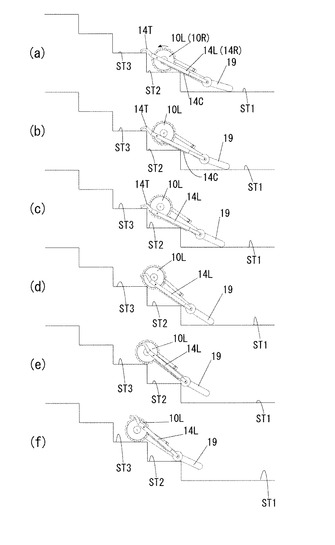
そして、図6(a)に示されるように、車輪10Rおよび10Lが、第1の踏み面ST2において回転され、リンク部材14Rおよび14Lが伸長状態とされるとき、係合部14Tが第2の踏み面ST3の段鼻に係合される。その際、凹凸部14cが第1の踏み面ST2の段鼻に当接されるので車両全体の下方への移動が抑制される。
【0020】
車両が第1の踏み面ST2から第2の踏み面ST3に移動する場合、図6(b)に示されるように、車輪10Rおよび10Lが連結ピン22Rおよび22Lの回りに反時計回り方向に、回転されるとき、車輪10Rおよび10Lは、第1の踏み面ST2から回転しながら本体部12を伴って浮き上がり、図6(c)に示されるように、リンク部材14Rおよび14Lが縮小状態となるように第2の踏み面ST3に向かって移動する。続いて、図6(d)に示されるように、車輪10Rおよび10Lが、回転中心軸線の回りに回転しながら第2の踏み面ST3の段鼻に当接した場合、リンク部材14Rおよび14Lの係合部14Tが第2の踏み面ST3の段鼻から離隔され、さらに車輪10Rおよび10Lがタイヤと段鼻との間の摩擦力に抗して回転中心軸線の回りに回転するとき、図6(e)および図6(f)に示されるように、車輪10Rおよび10Lが、第2の踏み面ST3に乗り上がることとなる。
従って、車両は、上述の動作を繰り返すことにより、複数の踏み面を有する階段状の走行路を登坂できることとなる。
【0021】
さらに、上述の例においては、従来のクローラを用いた不整地踏破機構と比較して、はるかに簡潔な駆動系構成であるので軽量に出来て搬送性に優れる。例えば、上述の車両の本体部12に、フック付キャリアベルトの各フックが係合される留め具を設けることにより、レスキュー隊員が、フック付キャリアベルトを用いて背中に担いで搬送もできる。
なお、上述の例においては、球形自在車輪16Rおよび16Lが備えられているが、
必ずしもこのようにされる必要がなく、例えば、球形自在車輪16Rおよび16Lを備えることなく、後方リンク部材14bの端部が路面に直接摺動される構成であってもよい。また、後方リンク部材14bの端部が本体部に対し摺動可能なスライド機構を介して連結されてもよい。さらに、後方リンク部材14bの端部がリンク部材を介して本体部に対して揺動可能に連結されてもよい。
図7は、本発明に係るクランク付車輪を備える車両の第2実施例の外観を示す。
図1に示される例では、車両が2輪車とされたが、その代わりに、図7においては、車両が4輪車とされる。なお、図7において、図1において同一の構成要素について同一の符号を付して示しその重複説明を省略する。
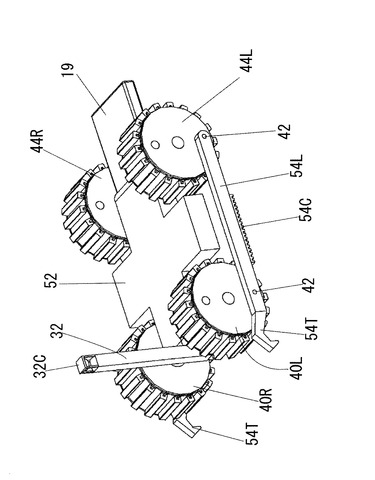
【0022】
図7において、車両は、制御ユニットを内蔵する本体部52と、本体部52の双方の端部にそれぞれ、相対向する一対の車輪40Rおよび40Lと、相対向する一対の車輪44Rおよび44Lと、本体部52における車輪40Rおよび40L相互間に配され車両の周囲環境を撮影する監視カメラ部32Cを支持するカメラ用アーム部32と、本体部52におけるカメラ用アーム32に向き合うように本体部52の他方の端部に配される移動補助アームとしての尾部19と、本体部52の両側部と一対の車輪40Rおよび40L、44Rおよび44Lの側面とに対向するように配されるリンク部材54Lおよび54Rとを主な要素として構成される。
【0023】
車輪40Rおよび40L、車輪44Rおよび44Lは、それぞれ、例えば、タイヤと、タイヤを支持するホイールとからなる。車輪40Rおよび40L、車輪44Rおよび44Lは、それぞれ、図示が省略されるが、後述する本体部52に設けられる駆動用モータユニット内の各ギヤヘッドの出力軸に連結されている。これにより、車輪40Rおよび40L、車輪44Rおよび44Lの回転中心軸線は、互いに共通の直線上にある。また、車輪40Rおよび40L、車輪44Rおよび44Lは、本体部52の長手方向に延びる端部に直交する回転中心軸線の回りに回動可能に支持されることとなる。
本体部52は、図示が省略されるが、複数のギヤヘッドおよびモータを内蔵する駆動用モータユニットと、監視カメラ部32Cからの撮像データに基づいてモータの動作制御を行う制御ユニットと、制御ユニットおよび駆動用モータユニット等に電力を供給するバッテリーとを備えている。
【0024】
制御ユニットは、例えば、中央演算処理装置(CPU)と、上述の撮像データ、および、中央演算処理装置(CPU)がモータの動作制御に必要とされる各データを格納するとともに、記憶された各データを供給する記憶部とを含んで構成される。バッテリーと制御ユニットとは、ケーブルにより接続されている。
【0025】
車輪40Rおよび車輪44Rにおいて、タイヤのトレッド部に直交する外側サイドウォール部に連なるホイールには、リンク部材54Rの一端および他端が連結されている。リンク部材54Rの一端は、車輪40Rに回動可能に連結され、リンク部材54Rの他端は、車輪44Rに回動可能に連結されている。
リンク部材54Rは、鉤状の係合部54Tを先端部に有している。リンク部材54Rの係合部54Tよりも後方側には、連結ピン42の一端が嵌合される孔が形成されている。リンク部材54Rの後端部にも、連結ピン42の一端が嵌合される孔が形成されている。
【0026】
リンク部材54Rにおける連結ピン42相互間の中間部における下端面には、走行中、階段の端部または障害物相互間の摩擦力を増大させる所定の長さを有する凹凸部54cが形成されている。連結ピン42は、車輪40R、車輪44Rの回転中心軸線に対し所定距離、偏心した位置でホイールを貫通している。
リンク部材54Lの構造は、リンク部材54Rの構造と同一とされるのでその重複説明を省略する。
これにより、車輪40Rおよび44Rとリンク部材54Rとが連結ピン42により連結され、所謂、クランクが形成されることとなる。また、車輪40Lおよび44Lとリンク部材54Lとが連結ピン42により連結され、所謂、クランクが形成されることとなる。
図8は、本発明に係るクランク付車輪を備える車両の第3実施例の外観を概略的に示す。
【0027】
図8において、車両は、後述する制御ユニット等を内蔵する電装品ユニット82が付設された本体部61Rおよび61Lと、本体部61Rの双方の端部にそれぞれ、設けられる一対の車輪60Rおよび62Rと、本体部61Lの双方の端部にそれぞれ、設けられる一対の車輪60Lおよび62Lと、本体部61Rの中央部と本体部61Lの中央部とを連結する連結部63に揺動可能に設けられ、車両の周囲環境を撮影する監視カメラ部33Cを支持するカメラ用スイングアーム部33と、本体部61Rの電装品ユニット82と一対の車輪60Rおよび62Rの側面とに向き合うように配されるリンク部材64Rおよび66Rと、本体部61Lの電装品ユニット82と一対の車輪60Lおよび62Lの側面とに向き合うように配されるリンク部材64Lおよび66Lと、を主な要素として構成される。
【0028】
車輪60Rおよび62R、車輪60Lおよび62Lは、それぞれ、例えば、タイヤと、タイヤを支持するホイールとからなる。車輪60Rおよび62Rは、それぞれ、後述する本体部61Rに回動可能に設けられるスプロケット80Fおよび80Rに連結されている。また、車輪60Lおよび62Lは、それぞれ、後述する本体部61Lに回動可能に設けられるスプロケット80Fおよび80Rに連結されている。これにより、車輪60Rおよび車輪60Lの回転中心軸線は、互いに共通の直線上にある。また、車輪62Rおよび62Lの回転中心軸線は、互いに共通の直線上にある。車輪60Rおよび62Rは、本体部61Rにおける双方の端部に車両の進行方向に対し直交する回転軸線の回りに回動可能に支持されることとなる。車輪60Lおよび62Lは、本体部61Lにおける双方の端部に車両の進行方向に対し直交する回転軸線の回りに回動可能に支持されることとなる。
本体部61Rおよび61Lは、互いに同一の構造を有するので本体部61Lについて説明し、本体部61Rの説明を省略する。
【0029】
本体部61Lは、図9に示されるように、所定の間隔をもって回動可能に設けられる一対のスプロケット80Fおよび80Rと、一対のスプロケット80Fおよび80R相互間に巻き掛けられるチェーン74と、チェーン74に掛けられるスプロケット(不図示)の回転軸と同心の軸上に配される減速用プーリ72と、減速用プーリ72と所定の相互間隔をもって配されるピニオンプーリ78と、電装品ユニット82内に配される駆動用モータ84(図10および図11参照)とを含んで構成されている。
ピニオンプーリ78は、駆動用モータ84の出力軸に連結されている。また、タイミングベルト76が、ピニオンプーリ78と減速用プーリ72との相互間に巻き掛けられている。駆動用モータ84は、例えば、DCモータ、あるいは、正転または逆転可能なリバーシブルモータであってもよい。
また、電装品ユニット82内には、図11に示されるように、監視カメラ部33Cからの撮像データに基づいて駆動モータ84の動作制御を行う制御ユニット92と、制御ユニット92および駆動用モータ84等に電力を供給するバッテリー90とが備えられている。
【0030】
制御ユニット92は、例えば、中央演算処理装置(CPU)と、上述の撮像データ、および、中央演算処理装置(CPU)が駆動用モータ84の動作制御に必要とされる各データを格納するとともに、記憶された各データを供給する記憶部とを含んで構成される。バッテリー90と制御ユニット92とは、ケーブル88により接続されている。制御ユニット92と駆動用モータ84との間は、ケーブル86によって接続されている。
【0031】
斯かる構成により、制御ユニット92により駆動用モータ84が作動状態とされる場合、例えば、図9において、矢印の示す反時計回り方向に回転されるピニオンプーリ78の回動力は、その回転数が、減速用プーリ72により減速された後、スプロケットを介してチェーン74に伝達される。これにより、チェーン74が矢印の示す方向に移動するので車両は、図8において、矢印Mの示す方向に進行することとなる。
【0032】
車輪60Lにおいて、タイヤのトレッド部に直交する外側サイドウォール部に連なるホイールには、図10に示されるように、連結アーム60ALの一端が連結されている。連結アーム60ALの一端は、車輪60Lの回転中心軸線に対し所定距離、半径方向に偏心した位置に連結されている。連結アーム60ALの他端には、後述するリンク部材64Lに連結される連結ピン60apが設けられている。また、車輪62Lにおいて、タイヤのトレッド部に直交する外側サイドウォール部に連なるホイールには、図10に示されるように、連結アーム62ALの一端が連結されている。連結アーム62ALの一端は、車輪62Lの回転中心軸線に対し所定距離、半径方向に偏心した位置に連結されている。連結アーム62ALの他端には、後述するリンク部材64Lに連結される連結ピン62apが設けられている。図10および図11において、連結アーム60ALおよび62ALは、互いに略平行となるように車輪60Lおよび62Lに取り付けられている。
【0033】
一方、図8に示されるように、車輪60Rにおいて、タイヤのトレッド部に直交する外側サイドウォール部に連なるホイールには、連結アーム60ALの一端が連結されている。連結アーム60ALの一端は、車輪60Rの回転中心軸線に対し所定距離、半径方向に偏心した位置に連結されている。連結アーム60ALの他端には、後述するリンク部材64Rに連結される連結ピンが設けられている。また、車輪62Rにおいて、タイヤのトレッド部に直交する外側サイドウォール部に連なるホイールには、連結アーム62ALの一端が連結されている。連結アーム62ALの一端は、車輪62Rの回転中心軸線に対し所定距離、半径方向に偏心した位置に連結されている。連結アーム62ALの他端には、後述するリンク部材64Rに連結される連結ピンが設けられている。連結アーム60ALおよび62ALは、互いに略平行となるように車輪60Rおよび62Rに取り付けられている。
リンク部材64Lおよび64Rは、互いに同一の構造を有するのでリンク部材64Lについて説明し、リンク部材64Rについての説明を省略する。
【0034】
リンク部材64Lは、図8に示されるように、上述の連結アーム60ALの連結ピン60ap、連結アーム62ALの連結ピン62apが挿入される孔(不図示)を所定の間隔をもって両端に有している連結部と、この連結部の両端にそれぞれ、形成される鉤状の係合部64FEおよび64REとを含んで構成されている。連結部の下端面には、走行中、階段の端部または障害物相互間の摩擦力を増大させる所定の長さを有する凹凸部64Cが形成されている。
【0035】
係合部64FEおよび64REは、その鉤部が互いに逆方向向きとなるように形成されている。また、リンク部材64Lには、連結される連結アーム60ALに対向して連結アーム68AFの一端がリンク部材64Lに回動可能に連結されている。連結アーム68AFの他端は、リンク部材66Lに連結ピン70を介して回動可能に連結されている。
さらに、リンク部材64Lには、連結される連結アーム62ALに対向して連結アーム68ARの一端がリンク部材64Lに回動可能に連結されている。連結アーム68ARの他端は、リンク部材66Lに連結ピン70を介して回動可能に連結されている。
【0036】
リンク部材66Lは、図8に示されるように、上述の連結ピン70が挿入される孔(不図示)を所定の間隔をもって両端に有している連結部と、この連結部の両端にそれぞれ、形成される鉤状の係合部66FEおよび66REとを含んで構成されている。連結部の下端面には、走行中、階段の端部または障害物相互間の摩擦力を増大させる所定の長さを有する凹凸部66Cが形成されている。係合部66FEおよび66REは、その鉤部が互いに逆方向向きとなるように形成されている。従って、リンク部材66Lは、本体部61L側に近い内側に配されるリンク部材64Lに連動して回動せしめられる。
【0037】
これにより、車輪60Rおよび62Rとリンク部材64Rとが連結ピン60ap,62apにより連結され、所謂、クランクが形成されることとなる。また、車輪60Lおよび62Lとリンク部材64Lとが連結ピン60ap,62apにより連結され、所謂、クランクが形成されることとなる。さらに加えて、車輪60Rおよび62Rに連動するリンク部材66Rによるクランク、および、車輪60Lおよび62Lに連動するリンク部材66Lによるクランクが形成される。
【0038】
斯かる構成において、図8に示される状態で、駆動用モータ84が作動状態とされる場合、車輪60R,60L、62R、62Lが、例えば、図12における矢印で示される方向、即ち、時計回り方向に回転されるとき、車両が、矢印Mの示す方向に進行し、リンク部材64Lの係合部64REおよびリンク部材64Rの係合部64REが,それぞれ、車輪62Lおよび車輪62Rの外周部よりも進行方向に突出し、一方、リンク部材66Lの係合部66FEおよびリンク部材66Rの係合部66FEが車輪60Lおよび車輪60Rの外周部よりも進行方向とは逆方向に向けて突出することとなる。
【0039】
さらに、車輪60R,60L、62R、62Lが、同一方向に回転され、車両が、矢印Mの示す方向に進行した場合、図13に示されるように、リンク部材66Lの係合部66REおよびリンク部材66Rの係合部66REが,それぞれ、車輪62Lおよび車輪62Rの外周部よりも進行方向に突出し、一方、リンク部材64Lの係合部64FEおよびリンク部材64Rの係合部64FEが車輪60Lおよび車輪60Rの外周部よりも進行方向とは逆方向に向けて突出することとなる。
従って、車輪60R,60L、62R、62Lが、例えば、図12における矢印で示される方向とは逆方向、即ち、反時計回り方向に回転される場合、車両が、矢印Mの示す方向とは逆方向に進行することとなる。
上述の車両は、図14(a)に示されるように、例えば、複数の踏み面を有する階段状の走行路を登坂することも可能とされる。なお、階段における各段の段差(けあげ)は、車輪60Rおよび60L、62Rおよび62Lが走行する路面から係合部66FEまでの最大高さよりも低いものとされる。
【0040】
先ず、図14(a)に示されるように、車両が段差に向かって路面ST1を走行し、リンク部材66Lの係合部66FEが第1の踏み面ST2の段鼻に係合したとき、リンク部材66Lの係合部66FEおよびリンク部材66Rの係合部66FEが車輪60Rおよび60Lよりも前方に突出し、リンク部材64Lの係合部64FEおよびリンク部材64Rの係合部64FEが車輪62Rおよび62Lよりも後方に突出することとなる。
【0041】
次に、図14(b)に示されるように、車輪60Rおよび60L、車輪62Rおよび62Lが連結ピン70の回りに反時計回り方向に、回転されるとき、車輪60Rおよび60Lは、路面ST1から回転しながら本体部61Rおよび61Lを伴って浮き上がり、図14(c)および図14(d)に示されるように、第1の踏み面ST2に向かって移動する。また、リンク部材64Lおよびリンク部材64Rは、連結ピン60apおよび62apの回転に伴って移動せしめられる。
【0042】
続いて、図14(e)および(f)に示されるように、リンク部材64Lの係合部64FEが第1の踏み面ST2の段鼻に係合したとき、リンク部材64Lの係合部64FEおよびリンク部材64Rの係合部64FEが車輪60Rおよび60Lよりも前方に突出し、リンク部材66Lの係合部66FEおよびリンク部材66Rの係合部66FEが車輪62Rおよび62Lよりも後方に突出することとなる。
【0043】
続いて、図15(g)および(h)に示されるように、車輪60Rおよび60L、車輪62Rおよび62Lが連結ピン60apおよび62apの回りに反時計回り方向に、回転されるとき、車輪60Rおよび60Lは浮き上がり状態を保ち、車輪62Rおよび62Lは、路面ST1から回転しながら本体部61Rおよび61Lを伴って浮き上がり、第1の踏み面ST2に向かって移動する。
【0044】
続いて、図15(i)および(j)に示されるように、車輪60Rおよび60Lが、回転しながら第1の踏み面ST2の段鼻に当接した場合、さらに車輪60Rおよび60Lがタイヤと段鼻との間の摩擦力に抗して回転するとき、図15(k)および図16(l)に示されるように、係合部66FEおよび64FEが第1の踏み面ST2の段鼻から離隔されるとともに、車輪60Rおよび60Lが、第1の踏み面ST2に乗り上がることとなる。
そして、図16(m)および(n)に示されるように、車輪60Rおよび60Lが、第1の踏み面ST2において回転中心軸線回りに回転される。その際、凹凸部64cが第1の踏み面ST2の段鼻に当接されるので車両全体の下方への移動が抑制される。
【0045】
車両が、路面ST1から第1の踏み面ST2に完全に移動する場合、図16(o)に示されるように、車輪60Rおよび60L、車輪62Rおよび62Lが、連結ピン60apおよび62apの回りにリンク部材66Lを伴って反時計回り方向に、回転されるとき、図16(p)に示されるように、車輪62Rおよび662Lは、路面ST1から回転しながら本体部61Rおよび61Lを伴って浮き上がる。従って、車両は、上述の動作を繰り返すことにより、複数の踏み面を有する階段状の走行路を登坂できることとなる。
【0046】
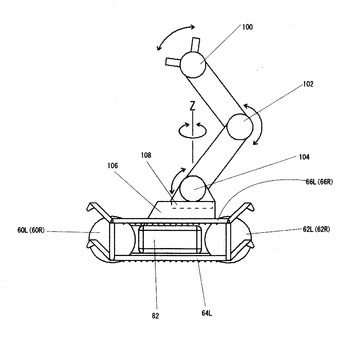
図17は、本発明に係るクランク付車輪を備える車両の第4実施例の外観を概略的に示す。 図8に示される例においては、監視カメラ部33Cを支持するカメラ用アーム部33を備えるものとされるが、図17に示される例においては、さらに加えて、車両が、本体部の上部に基台106を備えるものとされる。基台106は、Z軸線回りに旋回可能な肩旋回関節機構部108を有している。肩旋回関節機構部108には、肩屈伸関節機構部104が連結されている。肩屈伸関節機構部104は、先端に手開閉関節機構部100を有する肘屈伸関節機構102に連結されている。
【0047】
図18は、本発明に係るクランク付車輪を備える車両の第5実施例の外観を概略的に示す。
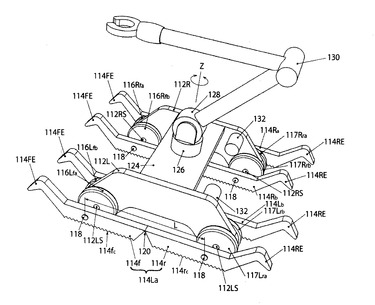
図18において、車両は、制御ユニット等を内蔵する電装品ユニット(不図示)が付設された本体部112Rおよび112Lと、本体部112Rの双方の端部にそれぞれ、設けられる一対のダブルの車輪116Rfa,116Rfbおよび117Rra,117Rrbと、本体部112Lの双方の端部にそれぞれ、設けられる一対のダブルの車輪116Lfa,116Lfbおよび117Lra,117Lrbと、本体部112Rの中央部と本体部112Lの中央部とを連結する連結基板部124と、本体部112Rの外側における車輪116Rfaおよび車輪117Rraの側面と向き合うように配されるリンク部材114Raと、本体部112Rの内側における車輪116Rfbおよび車輪117Rrbの側面と向き合うように配されるリンク部材114Rbと、本体部112Lの外側における車輪116Lfaおよび車輪117Lraの側面と向き合うように配されるリンク部材114Laと、本体部112Lの内側における車輪116Lfbおよび車輪117Lrbの側面と向き合うように配されるリンク部材114Lbと、を主な要素として構成される。
【0048】
ダブルの車輪116Rfaおよび116Rfb、117Rraおよび117Rrbは、それぞれ、例えば、タイヤと、タイヤを支持するホイールとからなる。車輪116Rfaおよび116Rfb、117Rraおよび117Rrbは、それぞれ、後述する本体部112Rに回動可能に設けられる支持軸112RSに支持されるとともに、支持軸112RSに設けられるスプロケット(不図示)に連結されている。これにより、ダブルの車輪116Rfaおよび116Rfbの回転中心軸線は、互いに共通の直線上にある。ダブルの117Rraおよび117Rrbの回転中心軸線は、互いに共通の直線上にある。
【0049】
また、ダブルの車輪116Lfaおよび116Lfb、117Lraおよび117Lrbは、それぞれ、例えば、タイヤと、タイヤを支持するホイールとからなる。ダブルの車輪116Lfaおよび116Lfb、117Lraおよび117Lrbは、それぞれ、後述する本体部112Lに回動可能に設けられる支持軸112LSに支持され、支持軸112LSに設けられるスプロケット(不図示)に連結されている。これにより、ダブルの車輪116Lfaおよび116Lfbの回転中心軸線は、互いに共通の直線上にある。ダブルの117Lraおよび117Lrbの回転中心軸線は、互いに共通の直線上にある。
従って、ダブルの車輪116Rfaおよび116Rfb、117Rraおよび117Rrbは、本体部112Rにおける双方の端部に車両の進行方向に対し直交する回転軸線の回りに回動可能に支持されることとなる。
また、ダブルの車輪116Lfaおよび116Lfb、117Lraおよび117Lrbは、本体部112Lにおける双方の端部に車両の進行方向に対し直交する回転軸線の回りに回動可能に支持されることとなる。
【0050】
連結基板部124の上面には、基台126が設けられている。基台126は、図18において、Z軸線回りに旋回可能な肩旋回関節機構部を有している。肩旋回関節機構部には、肩屈伸関節機構部128が連結されている。肩屈伸関節機構部128は、先端に手開閉関節機構部を有する肘屈伸関節機構130に連結されている。
本体部112Rおよび112Lは、互いに同一の構造を有するので本体部112Lについて説明し、本体部112Rの説明を省略する。
本体部112Lは、所定の間隔をもって回動可能に設けられる支持軸112LSに連結される一対のスプロケットと、その一対のスプロケット相互間に巻き掛けられるチェーンと、ギヤヘッド付駆動用モータ132とを含んで構成されている。
【0051】
駆動用モータ132のギヤヘッドは、所定の減速比の歯車減速機構部を有している。ギヤヘッドの出力軸には、上述のチェーンと噛み合うスプロケットが連結されている。駆動用モータ132は、例えば、DCモータ、あるいは、正転または逆転可能なリバーシブルモータであってもよい。駆動用モータ132は、図示が省略される電装ユニット内の制御ユニットにより駆動制御される。制御ユニットは、例えば、中央演算処理装置(CPU)と、中央演算処理装置(CPU)が駆動用モータ132の動作制御に必要とされる各データを格納するとともに、記憶された各データを供給する記憶部とを含んで構成される。
これにより、制御ユニットにより、作動状態とされる駆動用モータ132からの回動力がギヤヘッドの出力軸を介して上述のチェーンに伝達されるのでダブルの車輪116Lfaおよび116Lfb、117Lraおよび117Lrbが時計回り方向、あるいは、反時計回り方向に回動されることとなる。
リンク部材114Raおよび114Rbと、リンク部材114Laおよび114Lbとは、互いに同一の構造を有するのでリンク部材114Laおよび114Lbについて説明し、リンク部材114Raおよび114Rbについての説明を省略する。
【0052】
リンク部材114Laは、図18に示されるように、ヒンジ機構120を介して互いに変位可能に連結される二つのリンク部材114fおよび114rを含んで構成されている。リンク部材114fおよび114rには、それぞれ、連結ピン118の一端が挿入される孔が形成されている。その孔の相互間隔は、図18に示されるように、二つのリンク部材114fおよび114rが共通の直線上にある場合、一定の距離Lとなるように設定されている。リンク部材114fおよび114rにおける上述の孔よりも先端側には、それぞれ、鉤状の係合部114FEおよび114REが形成されている。従って、鉤状の係合部114FEおよび114REは、ヒンジ機構120が設けられる端部に向き合っている。また、鉤状の係合部114FEおよび114REは、その鉤部が互いに逆方向向きとなるように形成されている。
【0053】
リンク部材114fおよび114rにおける下端面には、それぞれ、所定の長さを有し、走行中、階段の端部または障害物相互間の摩擦力を増大させる凹凸部114fc、114rcが形成されている。また、ヒンジ機構120によって連結されるリンク部材114fおよび114rにおける連結端は、図21(A)に示されるように、斜面部114faおよび114raを有している。
【0054】
各連結ピン118の他端は、車輪116Lfaおよび117Lraのホイールにおける支持軸112LSの回転中心軸線から半径方向に所定距離、偏心した位置に連結されている。その所定距離および各連結ピン118の他端の支持軸112LSの回転中心軸線に対する相対位置は、同一に設定されている。
【0055】
ヒンジ機構120は、図21(A)および(B)に拡大されて示されるように、リンク部材114fの上面に固定される固定部120Aと、リンク部材114rの上面に配され、リンク部材114rの連結端をリンク部材114fの連結端に対し近接または離隔可能に支持する可動部120Bと、リンク部材114rの連結端をリンク部材114fの連結端に対し近接する方向に付勢する一対のコイルスプリング122とを含んで構成されている。
【0056】
固定部120Aは、小ネジBSおよびワッシャーWaにより、リンク部材114fの上面に固定されている。また、可動部120Bは、固定部120Aに対して連結ピン120Sにより回動可能に連結されている。可動部120Bは、互いに平行に所定の間隔で形成される長孔120Baを有している。長孔120Baは、リンク部材114rの連結端がリンク部材114fの連結端に対し近接または離隔する方向に沿って形成されている。小ネジBSはワッシャーWaを介して長孔120Baを通じてリンク部材114rの雌ねじに捩じ込まれている。これにより、可動部120Bの長孔120Baの周縁は、小ネジBSおよびリンク部材114rを上述の近接または離隔する方向に沿って案内することとなる。
各コイルスプリング122の一端は、可動部120Bの屈曲部120Bbに連結され、各コイルスプリング122の他端は、リンク部材114rにおけるヒンジ機構120から先端側に離隔した位置に固定されるストッパSBに係止されている。
【0057】
リンク部材114Lbは、リンク部材114Laと同様に、上述のヒンジ機構120を介して互いに変位可能に連結される二つのリンク部材114fおよび114rを含んで構成されている。リンク部材114fおよび114rには、それぞれ、連結ピン118の一端が挿入される孔が形成されている。その孔の相互間隔は、二つのリンク部材114fおよび114rが共通の直線上にある場合、一定の距離Lとなるように設定されている。リンク部材114fおよび114rにおける上述の孔よりも先端側には、それぞれ、鉤状の係合部114FEおよび114REが形成されている。従って、鉤状の係合部114FEおよび114REは、ヒンジ機構120が設けられる端部に向き合っている。また、鉤状の係合部114FEおよび114REは、その鉤部が互いに逆方向向きとなるように形成されている。
【0058】
リンク部材114fおよび114rにおける下端面には、それぞれ、所定の長さを有し走行中、階段の端部または障害物相互間の摩擦力を増大させる凹凸部114fc、114rcが形成されている。また、ヒンジ機構120によって連結されるリンク部材114fおよび114rにおける連結端は、斜面部114faおよび114raを有している。
【0059】
各連結ピン118の他端は、車輪116Lfbおよび117Lrbのホイールにおける支持軸112LSの回転中心軸線から半径方向に所定距離、偏心した位置に連結されている。その所定距離および各連結ピン118の他端の支持軸112LSの回転中心軸線に対する相対位置は、互いに同一に設定されている。また、リンク部材114Lbにおける各連結ピン118の他端の偏心量は、リンク部材114Laにおける各連結ピン118の他端の偏心量と同一に設定されている。
【0060】
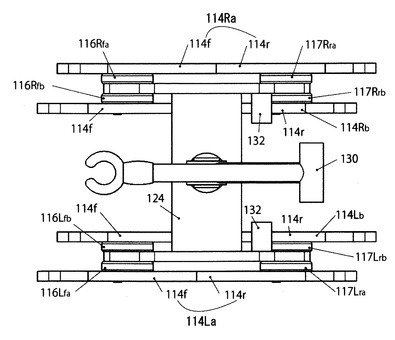
なお、図19および図20に示されるように、リンク部材114Lbは、車輪116Lfbおよび117Lrbを介して平行に配されるリンク部材114Laに対し車両の進行方向に沿って後方にずれている。また、リンク部材114Lbの位置は、リンク部材114Laの位置に対し高く設定されている。従って、リンク部材114Lbの各連結ピン118の他端の円周方向に沿った角度位置は、リンク部材114Laの各連結ピン118の他端の円周方向に沿った角度位置に対し所定の角度だけずれている。
【0061】
斯かる構成により、リンク部材114aおよび114Lbにおけるリンク部材114fの連結端は、図18に示されるようなリンク部材114rの連結端と面一となる状態から図22に示されるように、リンク部材114Laおよび114Lbがそれぞれ、折れ曲がり下方に向けて凸状となるように、リンク部材114rの連結端に対し変位可能とされる。即ち、リンク部材114Laおよび114Lbは、ヒンジ機構120により、リンク部材114fおよび114rが互いに交差し所定の角度をなすように折れ曲がるとともに、リンク部材114fおよび114rが伸縮することとなる。これにより、車両が、例えば、階段状の走行路を登坂する場合、リンク部材114Laがその段差に対しより滑らかに適応できるようになるという効果を奏する。
【0062】
以上の説明から明らかなように、上述の本発明に係るリンク部材をクランクとして取り付けた車輪を備える車両の各実施例においては、クローラベルトの使用をやめて、車輪運動を利用している。そして車輪に取り付けたリンク部材は、通常の車輪推進時には往復回転運動を持続するが、地面に接地しないので車輪推進には干渉しないため滑らかな車輪走行ができる。なおリンク部材を取り付けたことによる動的なアンバランスはバランサーを取り付けることで相殺できる。また、車輪に対して、クランクシャフトを着脱可能にして、平地走行時には、クランクシャフトを非連結とし、リンク部材を連動して往復回転運動しない様にすることで動的アンバランスが生じない様にする構造の導入も有効である。そして荒れ地においては、リンク部材が大きな不整地踏破性を発揮する。たとえば、複数の踏み面を有する階段状の走行路を登坂する場合、車両はこれらの動輪だけでは登れないが、リンク部材が階段をグリップしている間に、クランクシャフトに偏心して取り付けられた動輪が前方に運ばれるので動輪は上の段に上がる。これにより、車両が階段を歩行的に上昇する。また、悪路等の不整地の移動時に、車輪が凹部に嵌まっても、リンク部材が不整地を押し付けて車輪を凹部から引き抜き前方に置くので歩行動作を混入しながら容易に前進できる。このように本発明によれば、平地での高速走行性と不整地での対地適応移動性の両方が簡単な構造で容易に実現できる。また、本発明の一例においては、機構が単純で、クローラベルトの外れ等の問題がなく、車両全体を弾性体等で覆うことができるので車両が堅牢で耐衝撃性が高い。さらに、実用化のために著しく重要な価格の低減化も容易に図れる。その車両は、車輪型で無限回転軸のシールのみで完全防塵防水性となり、洗浄も容易であり、水中での使用も可能である。提案するクランク付車輪を備える車両は、実用上著しく有効な諸特性を発揮する。この車両をレスキューロボットに適用することにより、この研究開発によって、これまで世界的にも全く見られなかった日本独自の実用的なレスキューロボットが、実現できると考えられる。
【符号の説明】
【0063】
10R,10L,60R,60L,62R,62L 車輪
12 本体部
14R,14L,54R,54L,64R,64L,66R,66L リンク部材
16R,16L 球形自在車輪
18,84,132 モータ
19 尾部
61R,61L 本体部
84 駆動用モータ
120 ヒンジ機構
【特許請求の範囲】
【請求項1】
進行方向に対し直交する方向に延びる回転中心軸線の回りに回動する一対の車輪を、進行方向に沿って所定距離だけ離隔した第1の端部および第2の端部のうち、第1の端部に有する本体部と、
前記本体部に配され前記一対の車輪を駆動する駆動手段と、伸縮可能なリンク部材の一方の端部に設けられたフックの根元が前記第1の端部における前記一対の車輪の側部に連結ピンを介して前記回転中心軸線に対し半径方向に所定距離、偏心した位置に連結され、他方の端部が、前記第2の端部に回動自在に連結される複数のリンク部材と、を備え、
前記一対の車輪が回動される場合、前記複数のリンク部材の一方の端部に設けられたフックの先端が該車輪の回動に追従して進行方向と上下方向に往復回転運動され、前記複数のリンク部材が停止せしめられる場合、前記一対の車輪が前記連結ピンを中心として回動しながら、一方向に移動することを特徴とするクランク付車輪を備える車両。
【請求項2】
進行方向に対し直交する方向に延びる回転中心軸線の回りに回動する一対の車輪を、進行方向に沿って所定距離だけ離隔した第1の端部および第2の端部のうち、第1の端部に有する本体部と、
前記本体部に配され前記一対の車輪を駆動する駆動手段と、リンク部材の一方の端部に設けられたフックの根元が前記第1の端部における前記一対の車輪の側部に連結ピンを介して前記回転中心軸線に対し半径方向に所定距離、偏心した位置に連結され、リンク部材の他方の端部が、前記第2の端部に並進自在でかつ回動自在に連結される複数のリンク部材と、を備え、
前記一対の車輪が回動される場合、前記複数のリンク部材の一方の端部に設けられたフックの先端が該車輪の回動に追従して進行方向と上下方向に往復回転運動され、前記複数のリンク部材が停止せしめられる場合、前記一対の車輪が前記連結ピンを中心として回動しながら、一方向に移動することを特徴とするクランク付車輪を備える車両。
【請求項3】
進行方向に対し直交する方向に延びる回転中心軸線の回りに回動する一対の車輪を、進行方向に沿って所定距離だけ離隔した第1の端部および第2の端部に、それぞれ、有する本体部と、
前記本体部の右側および左側の側部に配された前後一対の車輪を、前後の車輪が同期して回転されるようにする駆動手段と、
一方の端部に設けられたフックの根元が、前記本体部の右側および左側の側部に配された前後一対の車輪の一方の側部に連結ピンを介して前記回転中心軸線に対し半径方向に所定距離、偏心した位置に連結され、他方の端部が前記本体部の右側および左側の側部に配された前後一対の車輪の他方の側部に連結ピンを介して前記回転中心軸線に対し半径方向に、一方の端子と同じ所定距離で同じ位相で同じ偏心位置に連結される複数のリンク部材と、を備え、
前記本体部の右側および左側の側部に配された前後一対の車輪が回動される場合、前記複数のリンク部材の一方の端部が該車輪の回動に追従して進行方向および上下方向に往復回転運動され、前記複数のリンク部材が停止せしめられる場合、前記一対の車輪が前記連結ピンを中心として回動しながら、一方向に移動することを特徴とするクランク付車輪を備える車両。
【請求項4】
前記複数のリンク部材は、それぞれ、伸縮と屈曲とが弾性的に出来るヒンジ機構を介して連結されることを特徴とする請求項2記載のクランク付車輪を備える車両。
【請求項5】
路面を付勢する尾部が、前記本体部における第2の端部に進行方向に沿って突出していることを特徴とする請求項1または請求項2記載のクランク付車輪を備える車両。
【請求項1】
進行方向に対し直交する方向に延びる回転中心軸線の回りに回動する一対の車輪を、進行方向に沿って所定距離だけ離隔した第1の端部および第2の端部のうち、第1の端部に有する本体部と、
前記本体部に配され前記一対の車輪を駆動する駆動手段と、伸縮可能なリンク部材の一方の端部に設けられたフックの根元が前記第1の端部における前記一対の車輪の側部に連結ピンを介して前記回転中心軸線に対し半径方向に所定距離、偏心した位置に連結され、他方の端部が、前記第2の端部に回動自在に連結される複数のリンク部材と、を備え、
前記一対の車輪が回動される場合、前記複数のリンク部材の一方の端部に設けられたフックの先端が該車輪の回動に追従して進行方向と上下方向に往復回転運動され、前記複数のリンク部材が停止せしめられる場合、前記一対の車輪が前記連結ピンを中心として回動しながら、一方向に移動することを特徴とするクランク付車輪を備える車両。
【請求項2】
進行方向に対し直交する方向に延びる回転中心軸線の回りに回動する一対の車輪を、進行方向に沿って所定距離だけ離隔した第1の端部および第2の端部のうち、第1の端部に有する本体部と、
前記本体部に配され前記一対の車輪を駆動する駆動手段と、リンク部材の一方の端部に設けられたフックの根元が前記第1の端部における前記一対の車輪の側部に連結ピンを介して前記回転中心軸線に対し半径方向に所定距離、偏心した位置に連結され、リンク部材の他方の端部が、前記第2の端部に並進自在でかつ回動自在に連結される複数のリンク部材と、を備え、
前記一対の車輪が回動される場合、前記複数のリンク部材の一方の端部に設けられたフックの先端が該車輪の回動に追従して進行方向と上下方向に往復回転運動され、前記複数のリンク部材が停止せしめられる場合、前記一対の車輪が前記連結ピンを中心として回動しながら、一方向に移動することを特徴とするクランク付車輪を備える車両。
【請求項3】
進行方向に対し直交する方向に延びる回転中心軸線の回りに回動する一対の車輪を、進行方向に沿って所定距離だけ離隔した第1の端部および第2の端部に、それぞれ、有する本体部と、
前記本体部の右側および左側の側部に配された前後一対の車輪を、前後の車輪が同期して回転されるようにする駆動手段と、
一方の端部に設けられたフックの根元が、前記本体部の右側および左側の側部に配された前後一対の車輪の一方の側部に連結ピンを介して前記回転中心軸線に対し半径方向に所定距離、偏心した位置に連結され、他方の端部が前記本体部の右側および左側の側部に配された前後一対の車輪の他方の側部に連結ピンを介して前記回転中心軸線に対し半径方向に、一方の端子と同じ所定距離で同じ位相で同じ偏心位置に連結される複数のリンク部材と、を備え、
前記本体部の右側および左側の側部に配された前後一対の車輪が回動される場合、前記複数のリンク部材の一方の端部が該車輪の回動に追従して進行方向および上下方向に往復回転運動され、前記複数のリンク部材が停止せしめられる場合、前記一対の車輪が前記連結ピンを中心として回動しながら、一方向に移動することを特徴とするクランク付車輪を備える車両。
【請求項4】
前記複数のリンク部材は、それぞれ、伸縮と屈曲とが弾性的に出来るヒンジ機構を介して連結されることを特徴とする請求項2記載のクランク付車輪を備える車両。
【請求項5】
路面を付勢する尾部が、前記本体部における第2の端部に進行方向に沿って突出していることを特徴とする請求項1または請求項2記載のクランク付車輪を備える車両。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2012−240626(P2012−240626A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−115424(P2011−115424)
【出願日】平成23年5月24日(2011.5.24)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月24日(2011.5.24)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
[ Back to top ]