
クルーズコントロールシステム
【課題】先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用する。
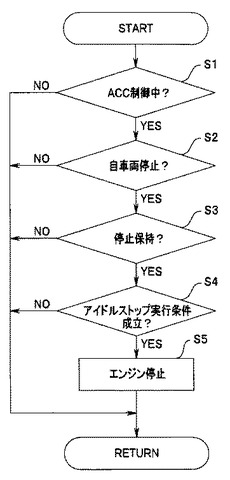
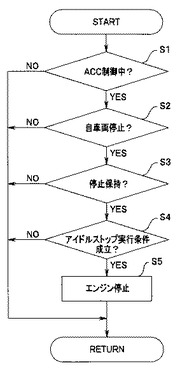
【解決手段】ACC制御中で自車両が停止した場合(S2)、自車両の停止保持状態をブレーキ圧やEPBの作動によって確認し(S3)、さらに、アイドルストップ実行条件が成立するか否かを調べる(S4)。そして、アイドルストップ実行条件が成立する場合、ACC制御ユニットからアイドルストップ制御ユニットにエンジン停止指令を出力し、エンジンのアイドル運転を停止させ、エンジンを自動停止させる(S5)。これにより、先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用することができる。
【解決手段】ACC制御中で自車両が停止した場合(S2)、自車両の停止保持状態をブレーキ圧やEPBの作動によって確認し(S3)、さらに、アイドルストップ実行条件が成立するか否かを調べる(S4)。そして、アイドルストップ実行条件が成立する場合、ACC制御ユニットからアイドルストップ制御ユニットにエンジン停止指令を出力し、エンジンのアイドル運転を停止させ、エンジンを自動停止させる(S5)。これにより、先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車両前方の先行車両に対する車間距離を維持しながら走行する先行車両追従走行の制御機能を有するクルーズコントロールシステムに関する。
【背景技術】
【0002】
近年、自動車等の車両においては、レーザレーダやカメラや等を用いて自車の外界環境を認識し、安全確保や走行制御等を行う技術が開発されている。特に、走行制御に関して、認識した道路状況等から自車両の車速や先行車両との車間距離を自動制御する車間距離自動維持制御(ACC;Adaptive Cruise Control)システムが代表的な技術として実用化されている。
【0003】
このようなACC制御システムでは、例えば、特許文献1に開示されているように、先行車両への追従走行中に先行車両が減速して停車したとき、自車両も減速して停車し、この状態を保持するようにしており、エンジンはアイドリング運転状態となる。従って、このとき、赤信号で車両が走行を停止する等の一定の条件下でエンジンを自動停止させるアイドルストップ制御システムを適用することで、先行車両が発進するまでの間、エンジンを自動的に停止させて燃費低減や排気エミッションの低減を図ることが可能となる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特表2002−523296号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、一義的に、追従走行制御とアイドストップ制御とを組み合わせるだけでは、必ずしもエンジンが適切に停止されるとは限らない。例えば、通常のアイドルストップ制御システムでは、坂道の登坂時等には、エンジンを停止すると自動変速機を通して駆動輪に出力されるクリープ力が無くなり、ドライバがブレーキペダルを踏み続けなければならないため、アイドルストップを実行しないことが多く、先行車両の停止によって自車両が停止した場合に、自車両を停車状態に保持する保持力を有効に利用することができない。
【0006】
本発明は上記事情に鑑みてなされたもので、先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用することのできるクルーズコントロールシステムを提供することを目的としている。
【課題を解決するための手段】
【0007】
本発明によるクルーズコントロールシステムは、自車両前方の先行車両に対する車間距離を維持しながら走行する先行車両追従走行の制御機能を有するクルーズコントロールシステムであって、上記先行車両の停止に伴って自車両が停止したとき、上記先行車両追従走行の制御機能を解除して自車両を停車状態に保持する保持力を発生させる停車保持力発生部と、上記保持力によって自車両が停車状態に保持され、且つエンジンのアイドル運転を停止してエンジンを自動停止させるアイドルストップの実行条件が成立したとき、自車両のエンジンを自動停止させるアイドルストップ制御部とを備えるものである。
【発明の効果】
【0008】
本発明によれば、先行車両の停止による自車両の停止時に適切にアイドルストップを実行することが可能となり、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用することができる。
【図面の簡単な説明】
【0009】
【図1】クルーズコントロールシステムの構成図
【図2】エンジン停止処理のフローチャート
【図3】エンジン再始動処理のフローチャート
【発明を実施するための形態】
【0010】
以下、図面を参照して本発明の実施の形態を説明する。
本実施の形態におけるクルーズコントロールシステムは、車載のカメラやレーザーレーダ等を用いて先行車両を検出し、その検出結果に応じて追従走行と定速走行とを自動的に切り換えるACC制御(Adaptive Cruise Control;車間距離自動維持制御)の機能と、ACC制御中の先行車両の停止による自車両停止時のエンジン停止及びドライバ操作による車両発進時のエンジン再始動を自動的に制御する機能とを有している。
【0011】
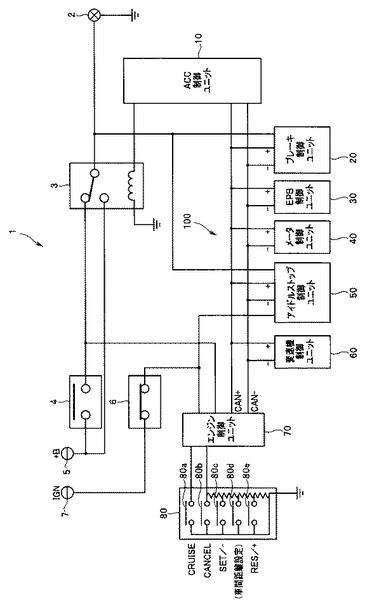
具体的には、図1に示すように、本実施の形態のクルーズコントロールシステム1は、CAN(Controller Area Network)等の通信バス100によるネットワークを介して接続された複数の制御ユニットで形成されている。各制御ユニットは、マイクロコンピュータを備えて構成され、ACC制御用のACC制御ユニット10を中心として、ブレーキ制御用のブレーキ制御ユニット20,EPB(ElectricalParkingBrake;電動パーキングブレーキ)の作動/解除を制御するEPB制御ユニット30,各種ディスプレイの表示制御を行うメータ制御ユニット40,所定の運転条件でエンジンの停止/再始動を制御するアイドルストップ制御ユニット50,トランスミッション制御用の変速機制御ユニット60,エンジン制御用のエンジン制御ユニット70等がネットワーク接続されている。
【0012】
ACC制御ユニット10は、本クルーズコントロールシステム1の中心となるユニットであり、ACC制御中の自動ブレーキ作動時にブレーキランプ2を点灯させるため、ブレーキランプリレー3のリレーコイルが接続されている。ブレーキランプリレー3は、その共通端子にブレーキランプ2が接続され、常閉接点端子がブレーキランプスイッチ4を介してバッテリ電源(+B)5に接続されると共に、常開接点端子がバッテリ電源5に接続されている。
【0013】
ブレーキランプスイッチ4は、図示しないブレーキペダルに連設され、ブレーキペダルの踏み込みによって接点が閉となるスイッチであり、一方の端子がバッテリ電源(+B)5に接続され、他方の端子がエンジン制御ユニット70の入力側に接続されている。尚、ブレーキペダルには、ブレーキランプスイッチ4に加え、ブレーキペダルの踏み込みによって接点が開となるブレーキスイッチ6が連設されている。ブレーキスイッチ6は、一方の端子がイグニッション(IGN)スイッチ7に接続され、他方の端子がエンジン制御ユニット70の入力側に接続されている。
【0014】
ACC非作動状態では、ドライバがブレーキペダルを踏み込むと、ブレーキランプスイッチ4がONし、ブレーキランプリレー3の常閉接点を介してバッテリ電源5からブレーキランプ2に電圧が印加され、ブレーキランプ2が点灯する。
【0015】
一方、ACC作動中は、ブレーキランプスイッチ4がOFFしたままでも、ブレーキランプ2の点灯/非点灯がACC制御ユニット10によって制御される。すなわち、自動ブレーキ作動時には、ACC制御ユニット10によってブレーキランプリレー3のリレーコイルが通電されて常開接点が閉じられ、ドライバがブレーキペダルを踏み込まなくともバッテリ電源5からブレーキランプ2に電圧が印加され、ブレーキランプ2が点灯する。
【0016】
ACC制御における車速や車間距離は、エンジン制御ユニット70に接続されるコマンドスイッチ80をユーザがマニュアル操作することで設定される。コマンドスイッチ80は、ステアリングに配置されたプッシュスイッチ及びトグルスイッチからなる操作スイッチであり、ACC制御システムの作動をON/OFFするメインスイッチであるクルーズスイッチ(図1中に「CRUISE」と表示)80a、ACC制御を解除するためのキャンセルスイッチ(図1中に「CANCEL」と表示)80b、そのときの自車両の速度でセットするためのセットスイッチ(図1中に「SET/−」と表示)80c、先行車両と自車両との車間距離を設定するための車間距離設定スイッチ80d、前回の記憶してあるセット車速で再セットするためのリジュームスイッチ(図1中に「RES/+」と表示)80eを有している。
【0017】
クルーズスイッチ80aがONされると、スイッチONの情報がエンジン制御ユニット70からCAN通信バス100を介して他の制御ユニットに送信され、システムが作動状態となる。このとき、メータ制御ユニット40により、インストルメントパネル内に設けられたディスプレイの「CRUISE」表示が点灯し、ACC制御システムの状態をドライバに提示する。
【0018】
このACC制御システムの状態を表示するディスプレイは、「CRUISE」の他、ACC制御への待機状態であることを示す「READY」、コマンドスイッチ80を介して車速等がセットされたことを示す「SET」の文字表示、先行車両の捕捉状態やセットされた車間距離を示すグラフィック表示、セット車速の数値表示等を含むマルチファンクションディスプレイとして構成されている。
【0019】
ACC制御ユニット10と各制御ユニット20,30,40,50,70とは、CAN通信バス100を介して情報を送受信し、主として、エンジン制御ユニット70を介したスロットル制御、変速機制御ユニット60を介したシフト制御、ブレーキ制御ユニット20を介したブレーキ制御により、ドライバが設定した車速や車間距離を維持するよう制御する。
【0020】
すなわち、ACC制御ユニット10は、ドライバによりセットされたセット車速での一定速走行とセット車速を上限とする先行車両への追従走行とを、先行車両の有無に応じて自動的に切り換える。先行車両への追従走行では、自車両と先行車両との車間距離、車速(相対速度)、及び先行車両の加速度に基づいて、ACC制御における目標車速を算出する。この目標車速は、例えば、少なくとも車間距離と車速とを軸とするマップ参照等によって算出され、エンジン制御ユニット70に送信される。エンジン制御ユニット70は、目標車速と現在の車速との偏差に応じたスロットル制御を実行し、自車両の車速が目標車速となるよう制御する。
【0021】
また、勾配が下り坂で且つ現在のギヤ位置でのスロットルオフ制動力(エンジンブレーキ)では車間距離を維持できない(接近しすぎる)と判断した場合には、目標ギヤ位置をACC制御ユニット10から変速機制御ユニット60に送信する。変速機制御ユニット60は、目標ギヤ位置へのシフトダウン制御を実行し、車間距離を維持する。
【0022】
また、ACC制御ユニット10は、自車両と先行車両との車間距離、相対速度、及び先行車両の減速度に基づいて、自車両の要求減速度を算出し、この要求減速度を発生させるために必要なブレーキ圧を算出してブレーキ制御ユニット20に要求液圧として送信する。ブレーキ制御ユニット20は、要求液圧に従ってブレーキ系の液圧を制御し、必要な減速度を発生させて自車両を減速させる。
【0023】
このようなACC制御において、先行車両への追従走行中に、先行車両の停止によって自車両も停止(車速有→0)した場合には、停止保持制御に移行し、先行車両への追従制御が解除される。この停止保持制御は、ACC制御による追従走行中に先行車両が減速して停止し、自車両も減速によって停止したとき、自車両を停車状態とするブレーキ圧を保持するようブレーキ制御ユニット20に指示することで実行される。この停止保持制御への移行は、他の制御ユニットにも伝達され、特に、アイドルストップ制御ユニット50は、停止保持制御への移行を受けて、所定の条件下でエンジンを自動的に停止させるアイドルストップ制御を実行する。
【0024】
アイドルストップ制御ユニット50は、通常、予め設定したエンジン自動停止条件(アイドルストップ実行条件)が成立する場合、エンジン制御ユニット70に信号を出力してエンジンのアイドル運転を停止させ、エンジンを自動停止させる。ここで、アイドルストップ実行条件が成立する場合とは、例えば、ブレーキペダルが踏み込まれており(ブレーキスイッチ6がOFF)、アクセルペダルが踏まれておらず、シフトレバー位置が「P」、「N」、「D」、「3速」、「2速」、「1速」の何れかで、自車速が略0であり、バッテリ容量が十分にある等の条件を全て満足する場合である。
【0025】
ACC制御の実行中は、通常のアイドルストップ実行条件のうち、ブレーキペダルが踏み込まれている条件は、停止保持制御の実行で置き換える。更に、以下の(1),(2)の何れかの条件を満足することを、アイドルストップ実行条件として追加する。
(1)ブレーキ圧が自車両を停車状態とする規定の圧力以上に保持されている条件
(2)EPBが作動している条件
【0026】
前述したように、停止保持制御では、ブレーキ圧が自車両を停車状態とする圧力以上に保持される。このブレーキ圧の保持は、ブレーキの加圧ポンプの耐久性を確保するため、停止保持開始から所定時間が経過すると解除され、以後は、EPB制御ユニット30を介してEPBを作動させる。従って、ACC制御中に先行車両の停止によって自車両が停止した場合、通常のアイドルストップ実行条件に、ACC制御ユニット10の停車保持力発生部としての機能によって発生させた保持力の条件、すなわち、ブレーキ圧が規定圧力以上に保持されている条件、或いはEPBが作動している条件を加え、ドライバによるブレーキ操作がなくとも確実に自車両を停車状態に保持することを必須の条件とする。
【0027】
尚、(2)の条件は、変速機のシフト位置を自動的に「P(パーキング位置)」に切換える条件としても良い。また、ACC制御中にドライバがブレーキペダルを踏込んで自車両を停止させた場合には、ACC制御は解除されるため、通常のアイドルストップ実行条件が適用される。
【0028】
次に、アイドルストップによってエンジンが停止している状態で先行車両が発進し、先行車両の発進に応じて自車両を発進させるには、エンジンを再始動させる必要がある。アイドルストップ制御ユニット50は、エンジンを自動停止させている状態で予め設定したエンジン再始動条件が成立するか否かを判断し、エンジン再始動条件が成立したとき、エンジン制御ユニット70に信号を出力してエンジンを再始動させる。
【0029】
エンジン再始動条件は、停止保持制御の状態で先行車両が発進し、先行車両の発進に応じて自車両を発進させる場合、ドライバがアクセルを踏み込む、或いはセットスイッチ80cやリジュームスイッチ80eを操作してACC制御を再開させることが条件となる。エンジン再始動後は、停止保持制御によるブレーキ或いはEPBが解除され、自車両の発進が可能となる。
【0030】
次に、以上のACC制御中のエンジン停止/再始動に係るプログラム処理について、図2,図3のフローチャートを用いて説明する。尚、ここでは、本プログラム処理は、ACC制御ユニット10にて実行されるものとする。
【0031】
図2のフローチャートは、ACC制御中に、先行車両が停止する等して自車両が停止した場合に、所定の条件下でエンジンを自動停止させる処理を示している。この処理では、先ず、最初のステップS1において、ACC制御中か否かを調べる。その結果、ACC制御中でない場合には本処理を抜け、ACC制御中の場合、ステップS1からステップS2へ進み、自車両の車速を調べる等して自車両が停止したか否かを判断する。
【0032】
ステップS2で自車両が停止していない場合には、ステップS2から本処理を抜け、自車両が停止した場合、ステップS3で自車両の停止保持状態を確認する。具体的には、ブレーキ圧が規定圧力以上に保持されている条件、EPBが作動している条件、或いは変速機のシフト位置が自動的にパーキング位置に切換されている条件の何れかを満足するか否かを調べ、何れの条件も満足されないときには、ステップS3から本処理を抜け、何れかの条件が満足されるとき、ステップS3からステップS4へ進み、通常のアイドルストップ実行条件が成立するか否かを調べる。
【0033】
その結果、ステップS4において、ドライバがアクセルペダルを踏込む等してアイドルストップ実行条件の一つでも満足されない条件があり、アイドルストップ実行条件が成立しない場合には、ステップS4から本処理を抜ける。一方、ステップS4において、アイドルストップ実行条件が成立する場合には、ステップS5へ進んで、アイドルストップ制御ユニット50にエンジン停止指令を出力し、本処理を終了する。アイドルストップ制御ユニット50は、ACC制御ユニット10からのエンジン停止指令を受けて、エンジン制御ユニット70に信号を出力してエンジンのアイドル運転を停止させ、エンジンを自動停止させる。
【0034】
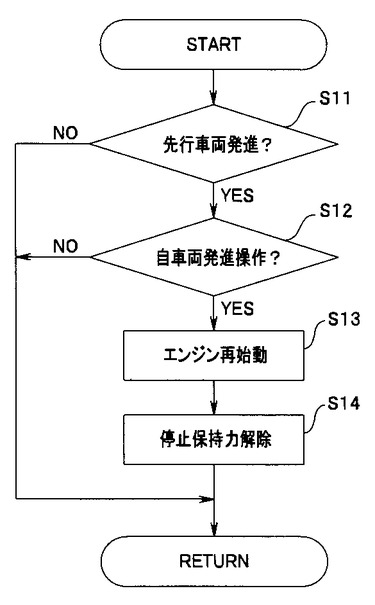
次に、エンジンを停止させた後、先行車両が発進した場合にエンジンを自動的に再始動させる処理について、図3のフローチャートを用いて説明する。
【0035】
図3の処理では、最初のステップS11において、先行車両が発進したか否かを調べる。そして、先行車両が発進していない場合には本処理を抜け、先行車両が発進した場合、ステップS12へ進んで、ドライバがアクセルペダルを踏む等して自車両を発進させる操作をしたか否かを調べる。
【0036】
ステップS12において、自車両の発進操作がなされていない場合には本処理を抜け、発進操作がなされた場合、ステップS13へ進んで、アイドルストップ制御ユニット50にエンジン再始動の指令を出力する。アイドルストップ制御ユニット50は、ACC制御ユニット10からのエンジン再始動指令を受けて、エンジン制御ユニット70に信号を出力してエンジンのスタータを起動させ、エンジンを自動的に再始動させる。
【0037】
そして、エンジンを再始動させた後は、ステップS14へ進み、ブレーキ圧を開放する或いはEPBの作動を停止する等して自車両を停車状態に保持している保持力を解除し、本処理を終了する。以後は、ドライバによりACC制御がキャンセルされない限り、先行車両への追従走行制御へ復帰する。
【0038】
このように本実施の形態においては、先行車両への追従走行中に、先行車両が停止して自車両が自動的に停止したとき、ブレーキ圧の保持、電子パーキングブレーキの作動、更には、パーキング位置への自動切換えにより、自車両を確実に停車状態に保持し、しかる後、アイドルストップによるエンジンの自動的を実行するので、坂道等でもエンジンを停止しながら支障なく自車両を停車状態に保持することができ、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用することができる。
【符号の説明】
【0039】
1 クルーズコントロールシステム
10 ACC制御ユニット
20 ブレーキ制御ユニット
30 EPB制御ユニット
50 アイドルストップ制御ユニット
70 エンジン制御ユニット
【技術分野】
【0001】
本発明は、自車両前方の先行車両に対する車間距離を維持しながら走行する先行車両追従走行の制御機能を有するクルーズコントロールシステムに関する。
【背景技術】
【0002】
近年、自動車等の車両においては、レーザレーダやカメラや等を用いて自車の外界環境を認識し、安全確保や走行制御等を行う技術が開発されている。特に、走行制御に関して、認識した道路状況等から自車両の車速や先行車両との車間距離を自動制御する車間距離自動維持制御(ACC;Adaptive Cruise Control)システムが代表的な技術として実用化されている。
【0003】
このようなACC制御システムでは、例えば、特許文献1に開示されているように、先行車両への追従走行中に先行車両が減速して停車したとき、自車両も減速して停車し、この状態を保持するようにしており、エンジンはアイドリング運転状態となる。従って、このとき、赤信号で車両が走行を停止する等の一定の条件下でエンジンを自動停止させるアイドルストップ制御システムを適用することで、先行車両が発進するまでの間、エンジンを自動的に停止させて燃費低減や排気エミッションの低減を図ることが可能となる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特表2002−523296号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、一義的に、追従走行制御とアイドストップ制御とを組み合わせるだけでは、必ずしもエンジンが適切に停止されるとは限らない。例えば、通常のアイドルストップ制御システムでは、坂道の登坂時等には、エンジンを停止すると自動変速機を通して駆動輪に出力されるクリープ力が無くなり、ドライバがブレーキペダルを踏み続けなければならないため、アイドルストップを実行しないことが多く、先行車両の停止によって自車両が停止した場合に、自車両を停車状態に保持する保持力を有効に利用することができない。
【0006】
本発明は上記事情に鑑みてなされたもので、先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用することのできるクルーズコントロールシステムを提供することを目的としている。
【課題を解決するための手段】
【0007】
本発明によるクルーズコントロールシステムは、自車両前方の先行車両に対する車間距離を維持しながら走行する先行車両追従走行の制御機能を有するクルーズコントロールシステムであって、上記先行車両の停止に伴って自車両が停止したとき、上記先行車両追従走行の制御機能を解除して自車両を停車状態に保持する保持力を発生させる停車保持力発生部と、上記保持力によって自車両が停車状態に保持され、且つエンジンのアイドル運転を停止してエンジンを自動停止させるアイドルストップの実行条件が成立したとき、自車両のエンジンを自動停止させるアイドルストップ制御部とを備えるものである。
【発明の効果】
【0008】
本発明によれば、先行車両の停止による自車両の停止時に適切にアイドルストップを実行することが可能となり、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用することができる。
【図面の簡単な説明】
【0009】
【図1】クルーズコントロールシステムの構成図
【図2】エンジン停止処理のフローチャート
【図3】エンジン再始動処理のフローチャート
【発明を実施するための形態】
【0010】
以下、図面を参照して本発明の実施の形態を説明する。
本実施の形態におけるクルーズコントロールシステムは、車載のカメラやレーザーレーダ等を用いて先行車両を検出し、その検出結果に応じて追従走行と定速走行とを自動的に切り換えるACC制御(Adaptive Cruise Control;車間距離自動維持制御)の機能と、ACC制御中の先行車両の停止による自車両停止時のエンジン停止及びドライバ操作による車両発進時のエンジン再始動を自動的に制御する機能とを有している。
【0011】
具体的には、図1に示すように、本実施の形態のクルーズコントロールシステム1は、CAN(Controller Area Network)等の通信バス100によるネットワークを介して接続された複数の制御ユニットで形成されている。各制御ユニットは、マイクロコンピュータを備えて構成され、ACC制御用のACC制御ユニット10を中心として、ブレーキ制御用のブレーキ制御ユニット20,EPB(ElectricalParkingBrake;電動パーキングブレーキ)の作動/解除を制御するEPB制御ユニット30,各種ディスプレイの表示制御を行うメータ制御ユニット40,所定の運転条件でエンジンの停止/再始動を制御するアイドルストップ制御ユニット50,トランスミッション制御用の変速機制御ユニット60,エンジン制御用のエンジン制御ユニット70等がネットワーク接続されている。
【0012】
ACC制御ユニット10は、本クルーズコントロールシステム1の中心となるユニットであり、ACC制御中の自動ブレーキ作動時にブレーキランプ2を点灯させるため、ブレーキランプリレー3のリレーコイルが接続されている。ブレーキランプリレー3は、その共通端子にブレーキランプ2が接続され、常閉接点端子がブレーキランプスイッチ4を介してバッテリ電源(+B)5に接続されると共に、常開接点端子がバッテリ電源5に接続されている。
【0013】
ブレーキランプスイッチ4は、図示しないブレーキペダルに連設され、ブレーキペダルの踏み込みによって接点が閉となるスイッチであり、一方の端子がバッテリ電源(+B)5に接続され、他方の端子がエンジン制御ユニット70の入力側に接続されている。尚、ブレーキペダルには、ブレーキランプスイッチ4に加え、ブレーキペダルの踏み込みによって接点が開となるブレーキスイッチ6が連設されている。ブレーキスイッチ6は、一方の端子がイグニッション(IGN)スイッチ7に接続され、他方の端子がエンジン制御ユニット70の入力側に接続されている。
【0014】
ACC非作動状態では、ドライバがブレーキペダルを踏み込むと、ブレーキランプスイッチ4がONし、ブレーキランプリレー3の常閉接点を介してバッテリ電源5からブレーキランプ2に電圧が印加され、ブレーキランプ2が点灯する。
【0015】
一方、ACC作動中は、ブレーキランプスイッチ4がOFFしたままでも、ブレーキランプ2の点灯/非点灯がACC制御ユニット10によって制御される。すなわち、自動ブレーキ作動時には、ACC制御ユニット10によってブレーキランプリレー3のリレーコイルが通電されて常開接点が閉じられ、ドライバがブレーキペダルを踏み込まなくともバッテリ電源5からブレーキランプ2に電圧が印加され、ブレーキランプ2が点灯する。
【0016】
ACC制御における車速や車間距離は、エンジン制御ユニット70に接続されるコマンドスイッチ80をユーザがマニュアル操作することで設定される。コマンドスイッチ80は、ステアリングに配置されたプッシュスイッチ及びトグルスイッチからなる操作スイッチであり、ACC制御システムの作動をON/OFFするメインスイッチであるクルーズスイッチ(図1中に「CRUISE」と表示)80a、ACC制御を解除するためのキャンセルスイッチ(図1中に「CANCEL」と表示)80b、そのときの自車両の速度でセットするためのセットスイッチ(図1中に「SET/−」と表示)80c、先行車両と自車両との車間距離を設定するための車間距離設定スイッチ80d、前回の記憶してあるセット車速で再セットするためのリジュームスイッチ(図1中に「RES/+」と表示)80eを有している。
【0017】
クルーズスイッチ80aがONされると、スイッチONの情報がエンジン制御ユニット70からCAN通信バス100を介して他の制御ユニットに送信され、システムが作動状態となる。このとき、メータ制御ユニット40により、インストルメントパネル内に設けられたディスプレイの「CRUISE」表示が点灯し、ACC制御システムの状態をドライバに提示する。
【0018】
このACC制御システムの状態を表示するディスプレイは、「CRUISE」の他、ACC制御への待機状態であることを示す「READY」、コマンドスイッチ80を介して車速等がセットされたことを示す「SET」の文字表示、先行車両の捕捉状態やセットされた車間距離を示すグラフィック表示、セット車速の数値表示等を含むマルチファンクションディスプレイとして構成されている。
【0019】
ACC制御ユニット10と各制御ユニット20,30,40,50,70とは、CAN通信バス100を介して情報を送受信し、主として、エンジン制御ユニット70を介したスロットル制御、変速機制御ユニット60を介したシフト制御、ブレーキ制御ユニット20を介したブレーキ制御により、ドライバが設定した車速や車間距離を維持するよう制御する。
【0020】
すなわち、ACC制御ユニット10は、ドライバによりセットされたセット車速での一定速走行とセット車速を上限とする先行車両への追従走行とを、先行車両の有無に応じて自動的に切り換える。先行車両への追従走行では、自車両と先行車両との車間距離、車速(相対速度)、及び先行車両の加速度に基づいて、ACC制御における目標車速を算出する。この目標車速は、例えば、少なくとも車間距離と車速とを軸とするマップ参照等によって算出され、エンジン制御ユニット70に送信される。エンジン制御ユニット70は、目標車速と現在の車速との偏差に応じたスロットル制御を実行し、自車両の車速が目標車速となるよう制御する。
【0021】
また、勾配が下り坂で且つ現在のギヤ位置でのスロットルオフ制動力(エンジンブレーキ)では車間距離を維持できない(接近しすぎる)と判断した場合には、目標ギヤ位置をACC制御ユニット10から変速機制御ユニット60に送信する。変速機制御ユニット60は、目標ギヤ位置へのシフトダウン制御を実行し、車間距離を維持する。
【0022】
また、ACC制御ユニット10は、自車両と先行車両との車間距離、相対速度、及び先行車両の減速度に基づいて、自車両の要求減速度を算出し、この要求減速度を発生させるために必要なブレーキ圧を算出してブレーキ制御ユニット20に要求液圧として送信する。ブレーキ制御ユニット20は、要求液圧に従ってブレーキ系の液圧を制御し、必要な減速度を発生させて自車両を減速させる。
【0023】
このようなACC制御において、先行車両への追従走行中に、先行車両の停止によって自車両も停止(車速有→0)した場合には、停止保持制御に移行し、先行車両への追従制御が解除される。この停止保持制御は、ACC制御による追従走行中に先行車両が減速して停止し、自車両も減速によって停止したとき、自車両を停車状態とするブレーキ圧を保持するようブレーキ制御ユニット20に指示することで実行される。この停止保持制御への移行は、他の制御ユニットにも伝達され、特に、アイドルストップ制御ユニット50は、停止保持制御への移行を受けて、所定の条件下でエンジンを自動的に停止させるアイドルストップ制御を実行する。
【0024】
アイドルストップ制御ユニット50は、通常、予め設定したエンジン自動停止条件(アイドルストップ実行条件)が成立する場合、エンジン制御ユニット70に信号を出力してエンジンのアイドル運転を停止させ、エンジンを自動停止させる。ここで、アイドルストップ実行条件が成立する場合とは、例えば、ブレーキペダルが踏み込まれており(ブレーキスイッチ6がOFF)、アクセルペダルが踏まれておらず、シフトレバー位置が「P」、「N」、「D」、「3速」、「2速」、「1速」の何れかで、自車速が略0であり、バッテリ容量が十分にある等の条件を全て満足する場合である。
【0025】
ACC制御の実行中は、通常のアイドルストップ実行条件のうち、ブレーキペダルが踏み込まれている条件は、停止保持制御の実行で置き換える。更に、以下の(1),(2)の何れかの条件を満足することを、アイドルストップ実行条件として追加する。
(1)ブレーキ圧が自車両を停車状態とする規定の圧力以上に保持されている条件
(2)EPBが作動している条件
【0026】
前述したように、停止保持制御では、ブレーキ圧が自車両を停車状態とする圧力以上に保持される。このブレーキ圧の保持は、ブレーキの加圧ポンプの耐久性を確保するため、停止保持開始から所定時間が経過すると解除され、以後は、EPB制御ユニット30を介してEPBを作動させる。従って、ACC制御中に先行車両の停止によって自車両が停止した場合、通常のアイドルストップ実行条件に、ACC制御ユニット10の停車保持力発生部としての機能によって発生させた保持力の条件、すなわち、ブレーキ圧が規定圧力以上に保持されている条件、或いはEPBが作動している条件を加え、ドライバによるブレーキ操作がなくとも確実に自車両を停車状態に保持することを必須の条件とする。
【0027】
尚、(2)の条件は、変速機のシフト位置を自動的に「P(パーキング位置)」に切換える条件としても良い。また、ACC制御中にドライバがブレーキペダルを踏込んで自車両を停止させた場合には、ACC制御は解除されるため、通常のアイドルストップ実行条件が適用される。
【0028】
次に、アイドルストップによってエンジンが停止している状態で先行車両が発進し、先行車両の発進に応じて自車両を発進させるには、エンジンを再始動させる必要がある。アイドルストップ制御ユニット50は、エンジンを自動停止させている状態で予め設定したエンジン再始動条件が成立するか否かを判断し、エンジン再始動条件が成立したとき、エンジン制御ユニット70に信号を出力してエンジンを再始動させる。
【0029】
エンジン再始動条件は、停止保持制御の状態で先行車両が発進し、先行車両の発進に応じて自車両を発進させる場合、ドライバがアクセルを踏み込む、或いはセットスイッチ80cやリジュームスイッチ80eを操作してACC制御を再開させることが条件となる。エンジン再始動後は、停止保持制御によるブレーキ或いはEPBが解除され、自車両の発進が可能となる。
【0030】
次に、以上のACC制御中のエンジン停止/再始動に係るプログラム処理について、図2,図3のフローチャートを用いて説明する。尚、ここでは、本プログラム処理は、ACC制御ユニット10にて実行されるものとする。
【0031】
図2のフローチャートは、ACC制御中に、先行車両が停止する等して自車両が停止した場合に、所定の条件下でエンジンを自動停止させる処理を示している。この処理では、先ず、最初のステップS1において、ACC制御中か否かを調べる。その結果、ACC制御中でない場合には本処理を抜け、ACC制御中の場合、ステップS1からステップS2へ進み、自車両の車速を調べる等して自車両が停止したか否かを判断する。
【0032】
ステップS2で自車両が停止していない場合には、ステップS2から本処理を抜け、自車両が停止した場合、ステップS3で自車両の停止保持状態を確認する。具体的には、ブレーキ圧が規定圧力以上に保持されている条件、EPBが作動している条件、或いは変速機のシフト位置が自動的にパーキング位置に切換されている条件の何れかを満足するか否かを調べ、何れの条件も満足されないときには、ステップS3から本処理を抜け、何れかの条件が満足されるとき、ステップS3からステップS4へ進み、通常のアイドルストップ実行条件が成立するか否かを調べる。
【0033】
その結果、ステップS4において、ドライバがアクセルペダルを踏込む等してアイドルストップ実行条件の一つでも満足されない条件があり、アイドルストップ実行条件が成立しない場合には、ステップS4から本処理を抜ける。一方、ステップS4において、アイドルストップ実行条件が成立する場合には、ステップS5へ進んで、アイドルストップ制御ユニット50にエンジン停止指令を出力し、本処理を終了する。アイドルストップ制御ユニット50は、ACC制御ユニット10からのエンジン停止指令を受けて、エンジン制御ユニット70に信号を出力してエンジンのアイドル運転を停止させ、エンジンを自動停止させる。
【0034】
次に、エンジンを停止させた後、先行車両が発進した場合にエンジンを自動的に再始動させる処理について、図3のフローチャートを用いて説明する。
【0035】
図3の処理では、最初のステップS11において、先行車両が発進したか否かを調べる。そして、先行車両が発進していない場合には本処理を抜け、先行車両が発進した場合、ステップS12へ進んで、ドライバがアクセルペダルを踏む等して自車両を発進させる操作をしたか否かを調べる。
【0036】
ステップS12において、自車両の発進操作がなされていない場合には本処理を抜け、発進操作がなされた場合、ステップS13へ進んで、アイドルストップ制御ユニット50にエンジン再始動の指令を出力する。アイドルストップ制御ユニット50は、ACC制御ユニット10からのエンジン再始動指令を受けて、エンジン制御ユニット70に信号を出力してエンジンのスタータを起動させ、エンジンを自動的に再始動させる。
【0037】
そして、エンジンを再始動させた後は、ステップS14へ進み、ブレーキ圧を開放する或いはEPBの作動を停止する等して自車両を停車状態に保持している保持力を解除し、本処理を終了する。以後は、ドライバによりACC制御がキャンセルされない限り、先行車両への追従走行制御へ復帰する。
【0038】
このように本実施の形態においては、先行車両への追従走行中に、先行車両が停止して自車両が自動的に停止したとき、ブレーキ圧の保持、電子パーキングブレーキの作動、更には、パーキング位置への自動切換えにより、自車両を確実に停車状態に保持し、しかる後、アイドルストップによるエンジンの自動的を実行するので、坂道等でもエンジンを停止しながら支障なく自車両を停車状態に保持することができ、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用することができる。
【符号の説明】
【0039】
1 クルーズコントロールシステム
10 ACC制御ユニット
20 ブレーキ制御ユニット
30 EPB制御ユニット
50 アイドルストップ制御ユニット
70 エンジン制御ユニット
【特許請求の範囲】
【請求項1】
自車両前方の先行車両に対する車間距離を維持しながら走行する先行車両追従走行の制御機能を有するクルーズコントロールシステムであって、
上記先行車両の停止に伴って自車両が停止したとき、上記先行車両追従走行の制御機能を解除して自車両を停車状態に保持する保持力を発生させる停車保持力発生部と、
上記保持力によって自車両が停車状態に保持され、且つエンジンのアイドル運転を停止してエンジンを自動停止させるアイドルストップの実行条件が成立したとき、自車両のエンジンを自動停止させるアイドルストップ制御部と
を備えることを特徴とするクルーズコントロールシステム。
【請求項2】
上記停車保持力発生部は、規定圧力以上のブレーキで自車両を停車状態に保持することを特徴とする請求項1記載のクルーズコントロールシステム。
【請求項3】
上記停車保持力発生部は、電動パーキングブレーキを作動させて自車両を停車状態に保持することを特徴とする請求項1記載のクルーズコントロールシステム。
【請求項4】
上記停車保持力発生部は、変速機のシフト位置をパーキング位置に切換えて自車両を停車状態に保持することを特徴とする請求項1記載のクルーズコントロールシステム。
【請求項5】
上記アイドルストップ制御部は、上記先行車両の発進に応じて自車両のドライバによる発進操作がなされたとき、自車両のエンジンを自動的に再始動させ、
上記停車保持力発生部は、自車両のエンジンが再始動された後、上記保持力を解除して上記先行車両追従走行の制御機能を復帰させることを特徴とする請求項1記載のクルーズコントロールシステム。
【請求項1】
自車両前方の先行車両に対する車間距離を維持しながら走行する先行車両追従走行の制御機能を有するクルーズコントロールシステムであって、
上記先行車両の停止に伴って自車両が停止したとき、上記先行車両追従走行の制御機能を解除して自車両を停車状態に保持する保持力を発生させる停車保持力発生部と、
上記保持力によって自車両が停車状態に保持され、且つエンジンのアイドル運転を停止してエンジンを自動停止させるアイドルストップの実行条件が成立したとき、自車両のエンジンを自動停止させるアイドルストップ制御部と
を備えることを特徴とするクルーズコントロールシステム。
【請求項2】
上記停車保持力発生部は、規定圧力以上のブレーキで自車両を停車状態に保持することを特徴とする請求項1記載のクルーズコントロールシステム。
【請求項3】
上記停車保持力発生部は、電動パーキングブレーキを作動させて自車両を停車状態に保持することを特徴とする請求項1記載のクルーズコントロールシステム。
【請求項4】
上記停車保持力発生部は、変速機のシフト位置をパーキング位置に切換えて自車両を停車状態に保持することを特徴とする請求項1記載のクルーズコントロールシステム。
【請求項5】
上記アイドルストップ制御部は、上記先行車両の発進に応じて自車両のドライバによる発進操作がなされたとき、自車両のエンジンを自動的に再始動させ、
上記停車保持力発生部は、自車両のエンジンが再始動された後、上記保持力を解除して上記先行車両追従走行の制御機能を復帰させることを特徴とする請求項1記載のクルーズコントロールシステム。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2012−206593(P2012−206593A)
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願番号】特願2011−73350(P2011−73350)
【出願日】平成23年3月29日(2011.3.29)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願日】平成23年3月29日(2011.3.29)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
[ Back to top ]